КОНСПЕКТ ЛЕКЦИОННОГО КУРСА «АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ» ДЛЯ 1 КУРСА ММФ. 12
ИЮНЯ 2009 ГОДА1
ВВЕДЕНИЕ
ГЛАВА 1. ЛИНЕЙНАЯ АЛГЕБРА. НАЧАЛЬНЫЕ СВЕДЕНИЯ (3 ЧАСА)
§ 1.1. Матрицы и определители
1.1.1. Задачи, приводящие к понятию матрицы и определителя.
1
1
a11 x1 a12 x 2 b1
a11 a12 x1 b1
x
.
2
2
a12 a22 x 2 b2
a12 x1 a22 x 2 b2
x
1.1.2. Определения. Матрица. Её размеры. Частные случаи: вектор-строка, вектор-столбец, прямоугольная матрица, квадратная матрица.
1.1.3. Определения. Линейные операции над матрицами, имеющими одинаковые размеры. Свойства
этих операций:
A (B C) ( A B) C,
A B B A,
A 0 A,
A ( A) 0,
( ) A A A,
( A B ) A B,
() A ( A),
1 A A.
1.1.4. Определения. Операция умножения матриц. Единичная матрица. Свойства операции умножения
матриц:
A(BC) ( AB)C,
A(B + C) AB AC,
A(B) ( AB),
AE EA A.
1.1.5. Определение. Операция транспонирования матрицы. Свойства этой операции:
A B AT BT ,
T
AB BT A T ,
T
A A T .
T
1.1.6. Определитель квадратной матрицы порядка 1,2,3.
Если A a11 , то A a11 ,
a11
a12
a12
, то A a11a22 a12 a12 ,
a22
a11
a12
a31
Если A a12
a13
a22
a32 , то по правилу треугольников, либо по правилу добавленных столбцов.
a33
Если A
a23
1.1.7. Векторная запись определителя:
a11 a12
det a12 a22
a13 a23
a31
a32 a1a 2a3 a1 , a 2 , a3 .
a33
1.1.8. Теорема о свойствах определителей.
1. A T A .
2. Знакопеременное свойство.
3. [a b, c, d] [acd] [bcd] .
4. [a, b, c] [abc] .
1
Если слово «Теорема» набрано курсивом, теорема приводится без доказательства, со ссылкой на курс алгебры.
1
[0bc] 0 .
[a, a, c] 0 .
[a b, b, c] [abc]
Разложение определителя по строке (столбцу).
AB A B .
10. Сумма произведений элементов строки на алгебраические дополнения соответствующих элементов другой строки равна нулю.
1.1.9. Определение. Дополнительный минор элемента квадратной матрицы (определителя). Алгебраическое дополнение элемента квадратной матрицы (определителя).
1.1.10. Приемы вычисления определителей.
1. Приведение к треугольному виду.
2. Понижение порядка.
1.1.11. Правило Крамера.
aij x j b j xi i .
5.
6.
7.
8.
9.
1.1.12. Определение. Матрица A , взаимная для квадратной матрицы A .
1.1.13. Теорема. AA AA A E .
Следствие. Если A 0 , то матрица
A
является для матрицы A левой обратной и правой обратной
A
(она обозначается A 1 и называется обратной матрицей).
1.1.14. Ранг матрицы.
Определение. Рангом матрицы называется максимальный порядок минора, отличного от нуля. Такой
минор называется базисным минором.
Определение линейной комбинации системы векторов-строк (векторов-столбцов).
Теорема. Всякая строка матрицы является линейной комбинации строк, содержащих базисный минор
(базисных строк).
Теорема. Следующие операции сохраняют ранг матрицы:
1. Транспонирование.
2. Изменение порядка следования строк.
3. Умножение строки на число, отличное от нуля.
4. Исключение нулевой строки.
5. Прибавление к строке другой строки, умноженной на произвольное число.
ГЛАВА 2. ВЕКТОРНОЕ ИСЧИСЛЕНИЕ (11 ЧАСОВ)
§ 2.1. Линейные операции над векторами
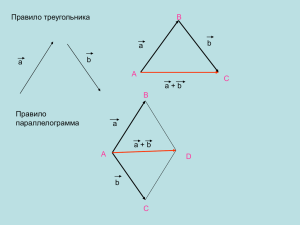
2.1.1. Приложенный (связанный) вектор AB . Свободный вектор a AB . Вектор 0. Вектор, противоположный данному вектору.
2.1.2. Откладывание вектора из точки.
2.1.3. Сложение векторов. Умножение вектора на число.
2.1.4. Свойства:
a + (b + c) = (a + b) + c
ab ba
a0a
a ( a ) 0
(a b) a b
( )a a a
()a ( a)
1 a a
2.1.5. Определение. Линейной комбинацией векторов a1 , a 2 ,..., ak с коэффициентами 1 , 2 ,…., k
называется вектор 1a1 2a 2 ... k a k .
2.1.6. Определение линейно зависимой системы векторов и линейно независимой.
2.1.7. Теорема. Если система векторов содержит линейно зависимую подсистему, то она линейно зависима.
2.1.8. Следствие. Если система векторов содержит 0, то она линейно зависима.
2
2.1.9. Теорема (критерий линейной зависимости). Система векторов линейно зависима тогда и только
тогда, когда в ней имеется вектор, равный линейной комбинации остальных векторов этой системы.
2.1.10. Определение базиса системы векторов (конечной либо бесконечной) 2. Для системы векторов U
подсистема e1 , e2 ,..., en называется базисом, если каков бы ни был x U , найдутся однозначно определяемые
числа x1 , x 2 ,..., x n , такие, что
n
x xiei
ï ðàâèëî Ýéí ø ò åéí à
i 1
x i ei .
Замечание. Если базис нас интересует лишь как система векторов, мы для него применяем обозначение
e1, e2 ,..., en . В тех случаях, когда мы хотим применять к соотношениям, включающим в себя базис, матричную
символику, базис изображается вектором-строкой e e1 , e2 ,..., en .
e1, e2 ,..., en – базис для системы векторов U , и x xi ei , то числа
x1 , x 2 ,..., x n называются координатами вектора x в базисе e1 , e2 ,..., en .
i
Замечание. Если базис e1 , e2 ,..., en фиксирован и x x ei , то вектор (как это принято в геометрии)
2.1.11. Определение. Если
часто записывают, перечисляя его координаты: x x , x ,..., x
1
2
n
. В тех случаях, когда мы желаем применить
к соотношениям, включающим в себя набор координат вектора, матричную символику, вектору x мы будем
x1
2
x
сопоставлять столбец x .
...
n
x
2.1.12. Теорема. Пусть вектор x имеет в базисе
базисе координаты
1). Вектор
2). Вектор
y . Тогда:
ei координаты xi , а вектор y имеет в том же
i
x y имеет координаты x i y i .
x имеет координаты x i .
3). Вектор 0 имеет координаты, равные нулю.
2.1.13. Определение. Вектор 0 считается параллельным любому вектору, любой прямой и любой плоскости.
2.1.14. Определение. Векторы a , b называются коллинеарными, если имеется прямая, которой параллелен каждый из них.
2.1.15. Теорема. Если U – система векторов на плоскости, то базис для U состоит из двух неколлинеарных векторов.
2.1.16. Определение правого базиса и левого базиса на плоскости.
2.1.17. Определение. Тройка векторов называется компланарной, если имеется плоскость, которой параллелен каждый из них.
2.1.18. Теорема. Если V – система векторов на плоскости, то базис для V состоит из трех некомпланарных векторов.
2.1.19. Определение правого базиса и левого базиса в пространстве.
2.1.20. Определение. Преобразованием базиса
ei называется переход к новому базису ei .
2.1.21. Теорема. Базисы e e1 , e2 ,..., en , e e1 , e2 ,..., en связаны соотношением
e eA ,
где
A – квадратная невырожденная матрица.
2.1.22. Разложение вектора по базису можно записать в матричной форме следующим образом:
x1
2
x
x ex e1 , e2 ,..., en .
...
n
x
2
Еще нет понятия линейного пространства.
3
2.1.23. Теорема. Если базис-строка преобразуется по закону e eA , то столбец координат преобразуется по формуле x A1x .
§ 2.2. Скалярное произведение векторов
2.2.1. Определение. Модулем вектора
AB .
a называется длина изображающего его направленного отрезка
Если зафиксирован масштабный отрезок , длина которого прията за единицу, то модуль вектора
изображается числом. Будем считать, что данное требование выполнено.
Свойства модуля:
a 0,
a 0 a 0.
a b a b , a a ,
2.2.2. Определение. Проекция вектора на ось
.
def
ï ðma a cos m, a
2.2.3. Теорема. Свойства проекции:
ï ðm a b ï ðma ï ðmb, ï ðm a ï ðma .
2.2.4. Определение. Проекция вектора
a на направление ненулевого вектора b .
def
ï ðba a cos b, a .
2.2.5. Теорема. Свойства проекции:
ï ðb a b ï ðba ï ðbb, ï ðb a ï ðba .
2.2.6. Определение. Нулевой вектор считается ортогональным любому вектору. Согласно определению,
каков бы ни был вектор a , мы считаем, что
cos a, 0 0 .
aиb
2.2.7. Определение. Скалярным произведением векторов
def
называется число
¶ .
ab a b cos ab
def
aa a 2 .
2.2.8. Теорема. Свойства скалярного произведения:
ab ba ,
a b c ac bc ,
a b ab ,
a2 0 ,
a2 0 a 0 ,
ab 0 a b .
2.2.9. Вычислительные формулы, основанные на скалярном произведении:
¶ ab .
a a2 , cos ab
a b
2.2.10. Определение. Матрицей Грама системы векторов
G a1 , a2 ,..., a n
a1, a2 ,..., an называется матрица
g11
g12
... g1n
g 21
g 22
... g 2 n
...
...
...
g n1
g n 2 ... g nn
...
,
где g ij ei e j .
2.2.11. Теорема. Матрица Грама, составленная для базиса, позволяет вычислить скалярное произведение любых двух векторов.
2.2.12. Определение. Базис называется ортонормированным (декартовым), если его векторы попарно
ортогональны, модули базисных векторов равны, и один из базисных векторов принят за масштабный отрезок.
4
Такой базис принято обозначать
i, j, k . Соответствующая матрица Грама
1 0 0
G i, j, k 0 1 0 .
0 0 1
2.2.13. Теорема. Если в декартовом базисе a a , a , a
1
2
3
, b b , b , b , то
1
2
3
ab a1b1 a 2b 2 a 3b3 .
2.2.14. Пусть
b
a
– столбец координат вектора
в том же базисе. Тогда скалярное произведение
a в декартовом базисе, b – столбец координат вектора
ab допускает матричную запись
ab a T b .
2.2.15. Определение. Преобразование базиса называется ортогональным, если оно сохраняет скалярные
произведения.
2.2.16. Определение. Квадратная невырожденная матрица A называется ортогональной, если
AT A 1 .
2.2.17. Теорема. Преобразование базиса ортогонально тогда и только тогда, когда его матрица ортого-
нальна.
2.2.18. Теорема. При надлежащем выборе параметра всякое ортогональное преобразование базиса
i j записывается в виде
i j i j
cos sin
sin
cos
, где
1, 1 .
Ориентация базиса сохраняется при 1 (поворот первого рода) и изменяется на противоположную при
1 (поворот второго рода).
2.2.19. Следствие 1. Если повернуть базис на угол при неподвижной плоскости, то координаты всякого вектора преобразуются по формулам
x x cos y sin
, 1, 1 .
y x sin y cos
2.2.20. Следствие 2. Если повернуть плоскость на угол при неподвижном базисе, то координаты вся-
кого вектора преобразуются по формулам
x x cos y sin
, 1, 1 .
y x sin y cos
§ 2.3. Векторное произведение векторов
2.3.1. Определение. Векторным произведением векторов
обозначаемый
ab , определяемый формулой
a и b (порядок важен) называется вектор,
0, åñëè a b .
Åñëè a b , òî
def
.
ab c 1). c a, c b;
2). c a b sin ab ,
3). Òðî éêà a, b, c î ðèåí òèðî âàí à òàê æå, êàê áàçèñ
2.3.2. Теорема. Пусть базис декартов. Тогда
i
j k
1
ab a a 2 a3 .
b1 b 2 b3
2.3.3. Теорема. Векторное произведение обладает следующими свойствами:
ab ba ,
a + b, c ac bc ,
5
a, b ab ,
ab 0 a b .
2.3.4. Полезная формула. Площадь параллелограмма, построенного на векторах
a и b , равна ab .
§ 2.4. Смешанное произведение трех векторов
2.4.1. Определение. Смешанным произведением
abc векторов a , b , c (порядок важен) называется
любое из следующих, равных друг другу, выражений:
a bc , ab c .
2.4.2. Вычислительная формула. Если базис декартов, то
a1
a2
a3
abc b1
b2
c1
c2
b3 .
c3
2.4.3. Теорема. Смешанное произведение обладает следующими свойствами:
abc bca cab acb cba bac ,
a b, c, p acp bcp ,
a, b, c abc ,
abc 0 òðî éêà a, b, c êî ì ï ëàí àðí à .
2.4.4. Определение ориентированного объема параллелепипеда, построенного на упорядоченной тройке
векторов.
2.4.5. Теорема. Смешанное произведение
построенного на упорядоченной тройке векторов
abc равно ориентированному объему параллелепипеда,
a , b, c.
§ 2.5. Двойное векторное произведение трех векторов
2.5.1. Определение. Двойным векторным произведением тройки векторов
ние выражения ab c .
a , b , c называется значе-
2.5.2. Теорема. ab c b ac a bc .
2.5.3. Теорема (тождество Якоби). ab c bc a ca b 0 .
ac ap
2.5.4. Теорема. ab cp
.
bc bp
2.5.5. Следствие. ab
2
a2
ab
ba b 2
det G (a, b) . Применение к вычислению площади.
§ 2.6. Косое произведение двух векторов на плоскости
2.6.1. Считаем плоскость
базис
i, j, k
Тогда
погруженной в трехмерное пространство. В пространстве задан декартов
. Пусть векторы a и b принадлежат плоскости .
так, что вектор k ортогонален плоскости
a a1 , a2 , 0 , b b1 , b2 , 0 .
В базисе
i, j плоскости имеем, соответственно,
a a1 , a2 ,
b b1 , b2
2.6.2. Определение. Косым произведением векторов a и b плоскости называется число3
3
Выбор обозначения ab для косого произведения обусловлен тем, что вычислительная формула для него ана-
логична вычислительной формуле для смешанного произведения abc . В дальнейшем понятие косого произведения будет обобщено на случай n -мерного пространства.
6
def
ab
a1 a 2
b1 b2
.
2.6.3. Свойства косого произведения.
ab ba ,
a b, c ac bc ,
a, b ab ,
(ab) 0 a b .
2.6.3. Определение ориентированной площади параллелограмма, построенного на упорядоченной паре
векторов, принадлежащих плоскости .
2.6.4. Теорема.
ной паре векторов
ab равно ориентированной площади параллелограмма, построенного на упорядочен-
a и b плоскости .
ГЛАВА 3. РЕПЕР НА ПЛОСКОСТИ. РЕПЕР В ПРОСТРАНСТВЕ (4 ЧАСА)
§ 3.1. Аффинный репер.
Рассматриваемые здесь конструкции в пространстве отличаются от аналогичных конструкций на плоскости, по существу, только числом координат. Поэтому мы будем иметь дело с пространством, имея в виду легкость перехода к плоскости.
3.1.1. Определение. Аффинным репером в пространстве называется объект
O , e1 , e2 , e3 .
ò î ÷êà áàçèñ
3.1.2. Определение. Радиус-вектором точки M относительно репера
M OM .
3.1.3. Определение. Координатами точки M в репере
O, ei называется вектор
O, ei называются координаты радиус-вектора
M в базисе ei . Если точка M имеет координаты x1 , x 2 , x3 , то пишут M x1 , x 2 , x3 .
1
2
3.1.4. Теорема. Если A a , a , a
3
, B b , b , b , то AB b
1
2
3
1
a1 , b 2 a 2 , b3 a 3 .
, если AC CB .
a i b i
i
делит в отношении отрезок [AB], то c
.
1
3.1.5. Определение. Говорят, что точка С делит отрезок [AB] в отношении
3.1.6. Теорема. Если точка C c
i
§ 3.2. Преобразование аффинного репера
3.2.1. Определение. Преобразованием репера
O, ei называется переход к другому реперу O, ei .
ñ – координаты новой вершины репера при неизменном базисе, x – координаты точки М в исходном репере, и x – координаты той же точки в новом репере, то x x c .
3.2.2. Теорема. Если
i
i
i
i
i
i
ei и «новый» базис ei связаны соотношением ei Aiiei ,
i
и вершина «нового» репера имеет в «старом» репере координаты c , то координаты x точки М в «новом»
репере связаны с координатами x той же точки в «старом» репере соотношением x A x c .
3.2.3. Теорема. Если «старый» базис
i
i
3.2.4. Определение. Аффинным преобразованием пространства
An An , заданное соотношениями
i
An
i
i
i
i
называется отображение
7
xi cij x j c0i , (i, j 1,...,3) ,
где
det cij 0 .
3.2.5. Матричная запись аффинного преобразования базиса-строки
O e1 e2 e3 O e1 e2 e3
1
0
0
0
1
0
2
0
3
0
1
1
2
1
3
1
1
2
2
2
3
2
1
3
2
3
3
3
a
a
a
a
a
a
a
a
a
a
a
a
O e1 e2 e3 :
a11
a12
a31
, причем det a1
2
a22
a32 0 .
a13
a23
a33
Краткая запись, использующая клеточную матрицу, имеет вид
1 0
, A 0.
O e1 e2 e3 O e1 e 2 e3
a0 A
3.2.6. Теорема. Аффинные преобразования образуют группу, в которой бинарной операцией является
композиция преобразований. Она называется полной аффинной группой.
3.2.7. Определение. Аффинной геометрией называется теория свойств фигур, сохраняющихся при любом аффинном преобразовании.
3.2.8. Замечание. Геометрическая конструкция (определение, теорема, задача) принадлежит аффинной
геометрии, если она допускает описание, использующее только понятие точки, вектора и линейных операций
над векторами. Если мы имеем дело с такой конструкцией, то будем говорить, что она рассматривается в аффинном пространстве A3 (либо на аффинной плоскости A2 ).
§ 3.3. Преобразование декартова репера
3.3.1. Общее аффинное преобразование, записанное для декартова репера
мулам
O i j k O i j k
1
0
a0
A
O, i, j, k , приводит к фор-
, причем матрица – ортогональная.
3.3.2. Согласно 2.2.18, формула поворота ортогонального репера плоскости на угол при неподвижной плоскости с последующим параллельным переносом имеет вид
1
0
0
1
O i j O i j a0 cos sin , 1, 1 .
a sin cos
3.3.3. Согласно 3.2.4 и 2.2.20, Если плоскость подвергнута повороту на угол при неподвижном репе2
0
a01
2 , то координаты преобразуются по формулам
a0
x x cos y sin a10
, 1, 1 .
0
y x sin y cos a1
ре, а затем параллельному переносу на вектор
3.3.4. Определение. Преобразования, определенные выше, называются движениями.
3.3.5. Теорема. Движения образуют группу (она называется группой движений), в которой бинарной
операцией является композиция преобразований. Эта группа является подгруппой полной аффинной группы.
3.3.6. Определение. Евклидовой геометрией называется теория, изучающая те свойства фигур, которые
сохраняются при любом движении.
3.3.7. Замечание 1. Геометрическая конструкция (определение, теорема, задача) принадлежит евклидовой геометрии, если она допускает описание, использующее только понятия аффинной геометрии и скалярного
произведения4. Если мы имеем дело с такой конструкцией, то будем говорить, что она рассматривается в евклидовом пространстве E3 (либо на евклидовой плоскости E2 ).
3.3.8. Замечание 2. Любая теорема аффинной геометрии справедлива в евклидовой геометрии. Конструкция же евклидовой геометрии может просто отсутствовать в аффинной геометрии. Например, прямоугольный треугольник имеется на евклидовой плоскости, но словосочетанию «прямоугольный треугольник» ничто не
соответствует на аффинной плоскости.
Прочие операции над векторами, рассматриваемые здесь нами, сводятся к скалярному произведению и ориентации базиса.
4
8
ГЛАВА 4. ТОЧКИ И ПРЯМЫЕ НА ПЛОСКОСТИ (4 ЧАСА)
4.1. Задача. Даны вершины треугольника
Решение.
S A1 A2 A1 A3 mod
A1 ( x1 , y1 ) , A2 ( x2 , y2 ) , A3 ( x3 , y3 ) . Найти его площадь S .
x2 x1
y2 y1
x3 x1
y3 y1
x1
mod x2
x3
y1 1
y2 1 .
y3 1
4.2. Определение. Пусть – множество точек плоскости. Фигурой на плоскости называется подмножество множества . Аналогично определяется фигура в пространстве.
4.3. Определение. (Координатными) уравнениями фигуры F называется система условий, налагаемых
на координаты текущей точки R ( x, y ) , которые равносильны соотношению R( x, y ) F .
Векторными уравнениями фигуры F называется система условий, налагаемых на радиус-вектор R
текущей точки R , которые равносильны соотношению R F .
Параметрическими уравнениями линии L называется пара функций f1 (t ), f 2 (t ), t T таких, что
( x, y) L tT x
f1 (t ) & y f 2 (t ) .
4.4. Задача. Написать уравнение прямой, проходящей через точку
ру
M 0 x0 , y0 и ортогональной векто-
N A, B {0,0} (он называется нормальным вектором прямой).
Решение. Векторное уравнение: R M0 N 0 .
A x x0 B y y0 0 .
4.5. Общее уравнение прямой L : Ax By C 0 .
L Ox A 0 , L Oy B 0 , O L C 0 .
4.6. Если прямая L не параллельна координатным осям и не проходит через начало координат, то для
x y
неё имеется уравнение в отрезках: 1 . Смысл чисел a и b .
a b
4.7. Задача. Даны две прямые: n1 : A1 x B1 y C1 0 , n2 : A2 x B2 y C2 0 . Написать условие
(Координатное) уравнение:
параллельности5 и условие совпадения.
Решение.
n
1
n2
A1
B1
A2
B2
4.8. Задача. Даны две прямые:
0,
n1 n2 Rang
A1
B1
C1
A2
B2
C2
1.
n1 : A1 x B1 y C1 0 , n2 : A2 x B2 y C2 0 . Вычислит угол
между ними.
A1 A2 B1B2
. Отметим, что n1 n2 A1 A2 B1B2 0 .
A12 B12 A22 B22
4.9. Если прямая L : Ax By C 0 не параллельна оси Oy , её можно задать уравнением
y kx b (оно называется «уравнение с угловым коэффициентом»). При этом число b есть отрезок, отсеченный прямой на оси Oy . Число k – угловой коэффициент – равно тангенсу направленного угла, отсчитанного от положительного направления оси Ox к прямой.
4.10. Задача. Даны прямая m1 : y k1 x b1 и прямая m2 : y k2 x b2 . Найти ориентированный угол
Решение.
cos n1n2
, отсчитанный от первой прямой ко второй прямой.
k k1
Решение. tg 2
. Заметим, что m1 m2 k1 k2 , m1 m2 k1k2 1 0 .
1 k1k2
4.11. Если прямая проходит через точку
можно задать уравнением
5
M 0 x0 , y0 и её угловой коэффициент равен k , то прямую
y y0 k x x0 .
Для нас совпадение – частный случай параллельности.
9
4.12. Задача. Написать уравнение прямой, проходящей через точку
ру
M 0 x0 , y0 и параллельной векто-
a , {0,0} (он называется направляющим вектором прямой).
Решение. Векторное уравнение:
R M0 , a 0 .
x x0
y y0
0.
Векторное параметрическое уравнение: R M 0 ta, t .
(Координатное) уравнение:
x x0 t
.
y y0 t
x x0 y y0
Каноническое уравнение:
.
4.13. Если прямая проходит через точки M1 x1 , y1 , M 2 x2 , y2 , то она может быть задана уравнениПараметрические уравнения:
ем
x x1
y y1
.
x2 x1 y2 y1
4.14. Задача. Даны прямые n1 :
x x1 y y1
x x2 y y2
, n2 :
. Написать условие параллель1
1
2
2
ности и условие совпадения.
Решение.
n
1
n2
1
1
2 2
0,
4.15. Задача. Вычислить угол между прямыми
Решение.
1 2 12
cos n1n2
12 22 22
2
1
4.16. Задача. Дана прямая
прямой (обозначается
Решение.
d M1 , n ).
d M1 , n
x1 x2
1 2
y1 y2
1
n1 n2 Rang
2
1 .
n1 , n2 .
. Отметим, что
n1 n2 12 12 0 .
x x0 t
и точка M1 x1 , y1 . Найти расстояние от точки M 1 до
n:
y y0 t
mod
x2 x1
y2 y1
2
2
4.17. Единичный вектор допускает запись
.
n cos ,sin , где – угол, отсчитанный от вектора i
к вектору n .
m найден вектор n cos ,sin , ортогональный прямой m и сонаправленный с перпендикуляром OP , проведенным к этой прямой. Тогда прямая m может быть задана уравнением
x cos y sin p 0 ,
где p OP .
Определение. Указанное уравнение называется нормальным уравнением прямой m .
4.19. Прямая m делит плоскость на две полуплоскости. Если прямая не проходит через начало координат O , то полуплоскость, содержащая точку O , называется отрицательной, а другая – положительной.
Определение. Отклонением точки M 0 от прямой m называется число
4.18. Пусть для прямой
d M 0 , m , åñëè òî ÷êà â ï î ëî æèòåëüí î é ï î ëóï ëî ñêî ñòè
M 0 , m
.
d M 0 , m , åñëè òî ÷êà â î òðèöàòåëüí î é ï î ëóï ëî ñêî ñòè
Ясно, что d M 0 , m M 0 , m .
10
4.20. Теорема. Для нахождения отклонения точки от прямой достаточно координаты точки подставить
в левую часть нормального уравнения прямой.
4.21. Теорема. Если прямая m задана уравнением Ax By C 0 , то нормальное уравнение для неё
имеет вид
Ax By C
A2 B 2
0
(знак в знаменателе противоположен знаку числа С; если С=0, то знак любой).
Следствие. Для прямой Ax By C 0 и точки
M 0 , m
Ax0 By0 C
A2 B 2
,
M 0 x0 , y0 справедливы следующие формулы:
d M 0 , m
Ax0 By0 C
.
A2 B 2
4.22. Определение. (Собственным) пучком прямых с центром в точке C называется множество всех
прямых плоскости, проходящих через точку C . Пучок обозначается C .
Теорема. Пусть две различные прямые
жат пучку
n1 : A1 x B1 y C1 0 , n2 : A2 x B2 y C2 0 принадле-
C . Произвольная прямая принадлежит тому же пучку тогда и только тогда, когда найдутся числа
, , не равные нулю одновременно, такие, что уравнение указанной прямой представимо в виде
( A1 x B1 y C1 ) A2 x B2 y C2 0 .
4.23. Определение. Несобственным пучком прямых с направлением, определяемым ненулевым векто-
ром
w , называется множество всех прямых плоскости, параллельных вектору w . Обозначается w . Для не-
собственного пучка прямых справедлива Теорема, текстуально неотличимая от предыдущей теоремы.
ГЛАВА 5. ЛИНИИ ВТОРОГО ПОРЯДКА (5 ЧАСОВ)
ВВЕДЕНИЕ. Аполлоний Пергский. Конические сечения.
§ 5.1. Эллипс
5.1.1. Определение. Эллипсом называется множество точек плоскости, сумма расстояний от которых до
двух фиксированных точек F1 и F2 , называемых фокусами, есть постоянная величина 2a , которая больше
величины
2c F1F2 . Прямая F1F2 называется фокальной прямой. Фокальные радиусы 1 MF1 ,
2 MF2 .
5.1.2. Теорема. Эллипс симметричен относительно фокальной прямой, а также относительно прямой,
ортогональной первой оси и делящей пополам фокальный отрезок.
5.1.3. Каноническая система координат для эллипса. Каноническое уравнение эллипса:
x2 y 2
1,
a 2 b2
где
b a2 c2 . Большая полуось a , малая полуось b .
x a cos t
5.1.4. Параметрические уравнения эллипса:
.
y b sin t
5.1.5. Изображение эллипса. Левый фокус F1 , правый фокус F2 .
5.1.6. Определение. Эксцентриситетом эллипса называется число
5.1.7. Теорема. Фокальные радиусы
шениям
c
.
a
1 , 2 текущей точки M x, y эллипса удовлетворяют соотно-
1 a x , 2 a x .
a
a
, d2 : x .
5.1.9. Теорема. Если для точки M на эллипсе si есть расстояние до директрисы d i , то
5.1.8. Определение. Директрисами эллипса называются прямые d1 : x
11
1
,
s1
5.1.10. Теорема. Если точка
уравнение
2
.
s2
M x0 , y0 лежит на эллипсе, то касательная к эллипсу в этой точке имеет
x0 x y0 y
2 1.
a2
b
5.1.11. Закон отражения светового луча от (искривленного) зеркала. Плоский случай.
5.1.12. Теорема. Лучи, выходящие из фокуса эллипса и отраженные им, соберутся в другом фокусе.
§ 5.2. Гипербола
5.2.1. Определение. Гиперболой называется множество точек плоскости, модуль разности расстояний
от которых до двух фиксированных точек F1 и F2 , называемых фокусами, есть постоянная величина 2a , которая меньше величины
2c F1F2 . Прямая F1F2 называется фокальной прямой. Фокальные радиусы
1 MF1 , 2 MF2 .
5.2.2. Теорема. Гипербола симметрична относительно фокальной прямой, а также относительно прямой, ортогональной первой оси и делящей пополам фокальный отрезок.
5.2.2. Каноническая система координат для гиперболы. Каноническое уравнение гиперболы:
x2 y 2
1,
a 2 b2
где
b c2 a2 . Вещественная полуось a , мнимая полуось b .
x a ch t
.
y b sht
b
5.2.4. Теорема. Гипербола имеет невертикальную асимптоту y x .
a
5.2.5. Изображение гиперболы. Левый фокус F1 , правый фокус F2 .
c
5.2.6. Определение. Эксцентриситетом гиперболы называется число .
a
5.2.7. Теорема. Фокальные радиусы 1 , 2 текущей точки M x, y гиперболы удовлетворяют соот5.2.3. Параметрические уравнения правой ветви гиперболы:
ношениям
1 a x , 2 a x .
a
a
, d2 : x .
5.2.9. Теорема. Если для точки M на гиперболе si есть расстояние до директрисы d i , то
1
2
,
.
s1
s2
5.2.8. Определение. Директрисами гиперболы называются прямые d1 : x
5.2.10. Теорема. Если точка
имеет уравнение
M x0 , y0 лежит на гиперболе, то касательная к гиперболе в этой точке
x0 x y0 y
2 1.
a2
b
5.2.11. Теорема. Продолжения лучей, выходящие из фокуса гиперболы и отраженные ею, соберутся в
другом фокусе.
x2 y 2
x2 y 2
1
1 называются сопряженными.
и
a 2 b2
a 2 b2
x2 y 2
Общий асимптотический крест этих гипербол имеет уравнение 2 2 0 .
a
b
5.2.12. Определение. Гиперболы
5.2.13. Определение. Гипербола с равными полуосями называется равнобочной гиперболой.
Уравнение такой гиперболы
x 2 y 2 a 2 приводится к виду xy
a2
, если за новые координатные
2
оси принять асимптоты гиперболы.
12
§ 5.3. Парабола
5.3.1. Определение. Параболой называется множество точек плоскости, равноудаленных от точки F
(фокуса) и прямой d (директрисы). Расстояние p от фокуса до директрисы называется фокальным параметром
параболы. p 0 .
5.3.2. Ось параболы. Вершина параболы. Положение фокуса.
5.3.3. Каноническая система координат для параболы. Каноническое уравнение параболы:
5.3.4. Если точка
кальный радиус
y 2 2 px .
x, y лежит на параболе, отнесенной к канонической системе координат, то её фо-
p
x.
2
5.3.5. Теорема. Если источник света находится в фокусе параболы, то отраженные лучи параллельны
оси параболы.
ГЛАВА 6. ТОЧКИ, ПРЯМЫЕ И ПЛОСКОСТИ В ПРОСТРАНСТВЕ (3 ЧАСА)
6.1. Задача. В пространстве
уравнение плоскости
E3 дана точка M 0 x0 , y0 , z0 и вектор N A, B, C 0 . Написать
, проходящей через M 0 и ортогональной вектору N .
: R M0 N 0 .
Решение. Векторное уравнение.
: A x x0 B y y0 C z z0 0 .
6.2. Общее уравнение. : Ax By Cz D 0 .
Уравнение в координатах.
Ox A 0 , Oy B 0 , Oz B 0 , O D 0 .
не параллельна ни одной координатной оси и не проходит через O , то она моx y z
жет быть задана уравнением в отрезках: 1 .
a b c
6.4. Задача. Даны плоскости 1 : A1 x B1 y C1 z D1 0 , 2 : A2 x B2 y C2 z D2 0 . Напи6.3. Если плоскость
сать условие параллельности и условие совпадения.
A1
A2
Решение. 1 2 Rang
B1
B2
C1
A1
1 , 1 2 Rang
C2
A2
B1
B2
C1
C2
D1
1 .
D2
6.5. Задача. Вычислить угол между теми же плоскостями.
Решение. cos 1 2
A1 A2 B1 B2 C1C2
A B12 C12 A22 B22 C22
2
1
6.6. Задача. В пространстве
.
E3 дана точка M 0 x0 , y0 , z0 и непараллельные векторы
a a1 , a2 , a3 , b b1 , b2 , b3 . Написать уравнение плоскости , проходящей через M 0 и параллельной
этим векторам.
Решение. Векторное уравнение.
Уравнение в координатах.
:
: R M0 , a, b 0 .
x x0
y y0
z z0
a1
b1
a2
b2
a3
b3
Векторное параметрическое уравнение:
0.
R M0 ua vb, u , v
.
x x0 ua1 vb1
Параметрические уравнения в координатах: y y0 ua2 vb2 .
z z ua vb
0
3
3
6.7. Задача. Даны неколлинеарные точки
уравнение плоскости
, содержащей эти точки.
M1 x1 , y1 , z1 , M 2 x2 , y2 , z2 , M 3 x3 , y3 , z3 . Написать
13
Решение.
x x1
y y1
z z1
: x2 x1
x3 x1
y2 y1
y3 y1
z2 z1 0 .
z3 z1
6.8. Теорема. Пусть в
E3 задан базис i, j, k и единичный вектор n . Тогда
n cos ,cos ,cos , где ni , nj , nk .
найден вектор n cos ,cos ,cos , ортогональный плоскости и
сонаправленный с перпендикуляром OP , проведенным к этой плоскости. Тогда плоскости может быть за6.9. Пусть для плоскости
дана уравнением
где
x cos y cos z cos p 0 ,
p OP .
Определение. Указанное уравнение называется нормальным уравнением плоскости .
6.10. Плоскость делит пространство на два полупространства. Если плоскость не проходит через
начало координат O , то полупространство, содержащее точку O , называется отрицательным, а другое – положительным.
Определение. Отклонением точки M 0 от плоскости называется число
d M 0 , , åñëè òî ÷êà â ï î ëî æèòåëüí î ì ï î ëóï ðî ñòðàí ñòâå
.
M0,
d M 0 , , åñëè òî ÷êà â î òðèöàòåëüí î ì ï î ëóï ðî ñòðàí ñòâå
Ясно, что d M 0 , M 0 , .
6.11. Теорема. Для нахождения отклонения точки от плоскости достаточно координаты точки подставить в левую часть нормального уравнения плоскости.
6.12. Теорема. Если плоскость задана уравнением Ax By Cz D 0 , то нормальное уравнение для неё имеет вид
Ax By Cz D
A2 B 2 C 2
0
(знак в знаменателе противоположен знаку числа D; если D=0, то знак любой).
Следствие. Для плоскости : Ax By Cz D 0 и точки
M 0 x0 , y0 , z0 справедливы следую-
щие формулы:
M0,
Ax By Cz D
,
d M0,
Ax0 By0 Cz0 D
.
A B C
A2 B 2 C 2
6.13. Определение. Для прямой n пучком плоскостей с осью n называется множество всех плоскостей, проходящих через прямую n . Пучок обозначается n .
2
2
2
Теорема. Пусть две различные плоскости
1 : A1 x B1 y C1 z D1 0 ,
n2 : A2 x B2 y C2 z D2 0 принадлежат пучку n . Произвольная плоскость принадлежит тому же пучку
тогда и только тогда, когда найдутся числа , , не равные нулю одновременно, такие, что уравнение указанной плоскости представимо в виде
( A1 x B1 y C1 z D1 ) A2 x B2 y C2 z D2 0 .
6.14. Задача. В пространстве
уравнения прямой
A3 задана точка M 0 x0 , y0 , z0 и вектор a a1 , a2 , a3 0 . Написать
m , если M 0 m, m a .
Решение. Векторное уравнение:
R M0 , a 0 .
Векторное параметрическое уравнение:
R M0 ta, t
.
x x0 ta1
Параметрические уравнения в координатах: y y0 ta2 , t .
z z ta
0
3
14
Канонические уравнения:
x x0 y y0 z z0
.
a1
a2
a3
6.15. Задача. В пространстве
сать канонические уравнения прямой
Решение.
A3 заданы две различные точки: M1 x1 , y1 , z1 , M 2 x2 , y2 , z2 . Напи-
M1M 2 .
x x1
y y1
z z1
.
x2 x1 y2 y1 z2 z1
x x1 ta1
x x2 tb1
6.16. Задача. В пространстве E3 даны две прямые. Именно, n1 : y y1 ta2 , n2 : y y2 tb2 .
z z ta
z z tb
1
3
2
3
Вычислить угол между этими прямыми.
Решение. cos n1n2
a1b1 a2b2 a3b3
a a22 a32 b12 b22 b32
2
1
.
a3
1.
b3
6.17. Задача. Вычислить расстояние от точки M 1 до прямой n : R M 0 ta .
Замечание.
Решение.
n
1
a a
n2 Rang 1 2
b1 b2
d M1 , n
M1 M 0 , a
a
6.18. Задача. В пространстве
.
E3 даны две непараллельные прямые. Именно, n1 : R M1 ta1 ,
n2 : R M 2 ta 2 . Вычислить расстояние между ними.
Решение. d n1 , n2
M 2 M1 , a1 , a 2
a1a2
.
ГЛАВА 7. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА (6 ЧАСОВ)
§ 7.1. Поверхность. Некоторые классы поверхностей
7.1.1. Определение. Простым куском поверхности называется точечное множество в трехмерном пространстве, которое при надлежащем выборе системы координат допускает задание уравнением вида
z f x, y , f x, y C 0 .
7.1.2. Определение. Точечное множество в трехмерном пространстве называется поверхностью, если
его можно представить объединением конечного числа подмножеств, каждое из которых есть простой кусок
поверхности.
7.1.3. Определение. Поверхность называется алгебраической, если в аффинной системе координат её
можно задать уравнением вида F ( x, y, z ) 0 , где F ( x, y, z ) – многочлен второй степени от переменных x ,
y , z . Степень многочлена называется порядком алгебраической поверхности.
7.1.4. Определение. Поверхность называется линейчатой, если её можно представить семейством прямых линий (они называются прямолинейными образующими).
7.1.5. Определение. Линейчатая поверхность называется цилиндром, если все её прямолинейные образующие параллельны.
7.1.6. Определение. Линия, полученная при пересечении цилиндра плоскостью, ортогональной его
прямолинейным образующим, называется ортогональной направляющей цилиндра.
7.1.8. Теорема. Если ортогональная направляющая цилиндра задана уравнениями
уравнение цилиндра в той же системе координат имеет вид f ( x, y ) 0 .
z 0
, то
f ( x, y ) 0
§ 7.2. Цилиндры второго порядка. Канонические уравнения
7.2.1. Эллиптический цилиндр.
15
7.2.2. Сопряженные гиперболические цилиндры и их общий асимптотический плоскостной крест.
7.2.3. Параболический цилиндр.
§ 7.3. Поверхности вращения второго порядка. Канонические уравнения
7.3.1. Определение поверхности вращения. Меридиан. Начальный меридиан. Параллель.
7.3.2. Теорема. Если ось Oz является осью вращения, а уравнения начального меридиана
y 0
2
2
, то поверхность вращения в той же системе координат задается уравнением f x y , z 0 .
2
f ( x , z) 0
7.3.3. Параболоид вращения.
7.3.4. Круглый конус.
7.3.5. Круглый цилиндр.
7.3.6. Эллипсоиды вращения
x2 y 2 z 2
2 1 . Частные случаи: a c , a c , a c .
a2
c
7.3.7. Сопряженные гиперболоиды вращения и их общий асимптотический конус:
x2 y 2 z 2
2 , 1, 0,1 .
a2
c
x2 y 2 z 2
Однополостный гиперболоид вращения
2 1,
a2
c
2
2
2
x y
z
Двуполостный гиперболоид вращения
2 1 ,
2
a
c
2
2
2
x y
z
Асимптотический конус
2 0.
2
a
c
§ 7.4. Деформация поверхности в направлении координатной оси
7.4.1. Определение. Говорят, что точка
M ( x, y, z ) получена смещением точки M ( x, y, z ) в направx x
лении координатной оси Oy с коэффициентом k , если y ky .
z z
7.4.2. Теорема. Если каждая точка поверхности : F ( x, y, z ) 0 смещена в направлении оси Oy с
y
коэффициентом k , то получаем новую поверхность : F x, , z 0 .
k
7.4.3. Эллиптический параболоид.
7.4.4. Трехосный эллипсоид.
7.4.5. Эллиптический конус.
7.4.6. Эллиптический двуполостный гиперболоид.
7.4.7. Эллиптический однополостный гиперболоид.
Теорема. Однополостный гиперболоид несет на себе два семейства прямолинейных образующих.
7.4.8. Гиперболический параболоид.
Теорема. Гиперболический параболоид несет на себе два семейства прямолинейных образующих.
ГЛАВА 8. СВЕДЕНИЯ ИЗ ТЕОРИИ ЛИНЕЙНЫХ ПРОСТРАНСТВ (16 ЧАСОВ)
§ 8.1. Линейное пространство
8.1.1. Алгебраическая структура.
8.1.2. Определение. Структура группы.
8.1.3. Определение. Структура поля. Поле
, , (поле
8.1.4. Определение линейного пространства над полем
V a, b, c,... , K , , ,... , а операции « », «
).
K , , : структура V , K , , , где
», «+», « » подчинены аксиомам
16
(a b) c a (b c) ,
a b b a ,
0a a 0 a ,
a a a (a) 0 ,
( a b ) ( a ) ( b) ,
( ) a ( a) ( a) ,
() a ( a) ,
1 a a.
Запись аксиом с заменой обозначений операций « », « », на «+», « ».
8.1.5. Определение линейно зависимой системы векторов и линейно независимой системы векторов.
8.1.6. Теорема. Если система векторов содержит линейно зависимую подсистему, то и сама система линейно зависима.
Следствие. Если система векторов содержит 0 , то система линейно зависима.
8.1.7. Теорема (критерий линейной зависимости). Система векторов линейно зависима тогда и только
тогда, какой-то вектор данной системы равен линейной комбинации остальных векторов этой системы.
8.1.8. Определение. Базисом линейного пространства называется максимальная (по количеству векторов) линейно независимая система векторов данного линейного пространства.
8.1.9. Теорема (критерий базиса). Для того чтобы система векторов
a1, a2 ,..., an являлась базисом
V над полем K , необходимо и достаточно, чтобы всякий вектор x из V можно было разложить по a1 , a2 ,..., an с коэффициентами из поля K , причем коэффициенты разложения однозначно
определены для данного вектора x .
линейного пространства
8.1.10. Определение. Коэффициенты разложения вектора
x
по базису
e e1 e2 ... en называются
координатами этого вектора в указанном базисе.
8.1.11. Теорема. Два базиса одного линейного пространства содержат одинаковое количество векторов.
8.1.12. Определение. Размерностью линейного пространства называется количество векторов в базисе
этого пространства.
Обозначение размерности линейного пространства V : dimV .
8.1.13. Определение. Преобразованием базиса
выражение векторов нового базиса через старый базис:
ei Aiiei ,
e e1 e2 ... en в базис e e1 e2 ... en называется
i, i 1,..., n .
Матричная запись преобразования базиса:
e eA .
8.1.14. Теорема. Преобразование базиса совершается с невырожденной матрицей преобразования.
8.1.15. Теорема. Если базис (строка) преобразуется по формуле e eA , то закон преобразования
столбца координат таков:
x A 1 x .
i
1
i
8.1.16. Обозначение. Если A Ai , то A Ai .
8.1.17. Теорема. Преобразования базиса n -мерного линейного пространства образуют группу относительно композиции преобразований.
8.1.18. Определение. Эта группа называется полной линейной группой GL ( n, Ў ) .
8.1.19. Теорема. Группа GL ( n, Ў ) изоморфна группе невырожденных квадратных матриц порядка
вещественными элементами.
8.1.20. Определение. Пусть в базисе
nс
e e1 e2 ... en векторы xi (i 1,..., n) имеют координаты
xij (i, j 1,..., n) . Косым произведением данных векторов в данном базисе называется число
def
x1x2 ...xn e det
xij .
8.1.21. Теорема. Независимо от выбора базиса e
x1x2 ...xn e 0 Rang x1 , x2 ,..., xn n .
8.1.22. Теорема. Пусть в результате преобразования f базиса
j
e в базис p координаты векторов
j k
k i
xi (i 1,..., n) перешли в координаты xi A x . Тогда закон преобразования косого произведения таков:
17
x1x2 ...xn p x1x2 ...xn e det
Следствие. Для двух систем векторов
Ai j x1x2 ...xn e det A .
xi (i 1,..., n) , y i (i 1,..., n) величина
x1x2 ...xn e
y1y 2 ...y n e
не зависит от выбора базиса e , а значит, неизменна при любых преобразованиях из полной линейной группы.
8.1.23. Определение. Функция векторных аргументов, сохраняющая свое значение при любом преобразовании некоторой группы G преобразований, называется инвариантом группы G
8.1.24. Мы располагаем инвариантом полной линейной группы. Укажем еще один.
Теорема. Если x y , то это соотношение между векторами x , y , не зависит от выбора базиса (является инвариантом полной линейной группы).
8.1.25. Определение. Преобразование базиса называется унимодулярным, если модуль определителя
преобразования равен 1.
8.1.26. Теорема. Преобразование базиса n -мерного линейного пространства унимодулярное тогда и
только тогда, когда оно сохраняет модуль косого произведения любых n векторов.
8.1.27. Теорема. Унимодулярные преобразования образуют группу преобразований. Она называется
специальной линейной группой
SL n, Ў .
8.1.28. Определение. Основной инвариант специальной линейной группы (косое произведение) называется
n -мерным объемом.
8.1.29. Определение линейного подпространства.
8.1.30. Теорема. Критерий линейного подпространства.
8.1.31. Определение. Базой конечной системы векторов линейного пространства называется максимальная подсистема, обладающая тем свойством, что каждый вектор системы есть линейная комбинация векторов подсистемы.
8.1.32. Определение. Рангом системы векторов называется количество векторов в базе данной системы.
8.1.33. Определение. Линейной оболочкой
a1 , a2 ,..., ak системы векторов a1 , a2 ,..., ak называет-
ся семейство всех линейных комбинаций указанной системы векторов.
8.1.34. Теорема Линейная оболочка системы векторов линейного пространства является линейным подпространством данного пространства.
8.1.35. Теорема.
dim a1 , a2 ,..., ak Rang a1 , a2 ,..., ak .
8.1.36. Определение. Сумма и пересечение линейных подпространств.
def
L1L2 x x L1 & x L2 ,
def
L1 L2 z z x y & x L1 & y L2 .
8.1.37. Теорема. Сумма линейных подпространств и пересечение линейных подпространств суть линейные подпространства.
8.1.38. Теорема.
dim L1 L2 dim L1 dim L2 dim(L1L2 ) .
§ 8.2. Арифметическое пространство
8.2.1. Определение. Арифметическим пространством называется алгебраическая структура
где
n
a1
2
a
x x , ai
...
n
a
n
, , , ,
i
i
i
i
i
i
, операции «+» и « » определены так: a a , a b a b .
Данное пространство обозначается
8.2.2. Теорема. Пространство
n
.
n
есть
n -мерное линейное пространство над полем
A имеет столбцами векторы a1 , a2 ,..., ak
A a1 , a2 ,..., ak .
8.2.3. Обозначение. Если матрица
странства, то мы пишем
8.2.4. Теорема.
.
арифметического про-
Rang a1 , a2 ,..., ak Rang a1 , a2 ,..., ak .
8.2.5. Теорема. Система векторов
18
1
0
0
0
1
0
e10 , e20 ,..., en0
...
...
...
0
0
1
n
составляет базис пространства
.
Определение. Этот базис называется натуральным базисом.
8.2.6. Теорема. Векторы
a1 , a2 ,..., an
составляют базис пространства
n
тогда и только тогда, когда
det a1 , a2 ,..., ak 0 .
8.2.7. Определение. Линейной 1-формой (ковектором) на линейном пространстве
отображение
f:
обладающее следующими свойствами:
n
n
называется
,
f a b f a f b ,
f (a ) f (a ).
8.2.8. Определение суммы ковекторов и произведения ковектора на вещественное число.
8.2.9. Теорема. Если
U ,
U – множество всех ковекторов на линейном пространстве
, , есть n-мерное линейное пространство над полем
n
, то структура
.
Определение. Это линейное пространство называется сопряженным пространству
8.2.10. Обозначение. Ковекторы обозначаем символами вида a .
8.2.11. Теорема. Пусть
ковекторов таких, что
e ei – базис линейного пространства
e i (e j ) ij
(символ Кронекера). Тогда
e
n
n
.
– система
. Пусть e e
j
есть базис сопряженного пространства.
e называется дуальным для базиса e .
i
i
i
8.2.12. Теорема. Если a a ei , b bi e , то b a bi a .
8.2.13. Определение. Число b a называется скалярным произведением ковектора b
обозначается любым из следующих способов: ba , ab .
Определение. Базис
8.2.14. Теорема. Если базис
дуальный базис преобразуется так:
8.2.15. Поскольку
a
e ei пространства
e i Aii e i .
отождествляется со столбцом, и
n
преобразуется по формуле ei
n,
отличие которого от
тора. Мы получаем еще одно линейное пространство
8.2.16. Теорема Всякое
a
и
Aiiei , то
ba bi ai , то ковектор естественно отож-
дествлять с вектором-строкой, а линейное пространство, сопряженное пространству
нейным пространством векторов-строк
и вектора
n
n
, отождествить с ли-
заключается только в форме записи век-
n.
n -мерное линейное пространство над Ў изоморфно линейному пространству
Ў .
n
Следствие. Мы ничего не потеряем в общности наших построений, если под линейным пространством
будем подразумевать арифметическое пространство.
§ 8.3. Линейные операторы
V отображение :V V называется линейным
оператором, если для любых a , b из V и любого вещественного справедливы равенства
(a b) (a) (b) , (a) (a) .
Заметим, что действие оператора обычно передают не символом (a) , а записью a .
8.3.1. Определение. Для линейного пространства
19
8.3.2. Пусть в линейном пространстве
V зафиксирован базис e (e1 , e2 ,..., en ) . Тогда x x i ei и
(x) ( xi ei ) xi (ei ) . Каждый из векторов (ei ) разложим по базису: (ei ) ij e j . Таким образом,
(x) xi ij e j . В более подробной записи (e j x j ) e j ij xi . Таким образом, вектор x со столбцом коорди x1
2
x
нат x под действием оператора переходит в вектор (x) со столбцом координат
...
n
x
1i xi 11
2 i 2
i x 1
... ...
n i n
i x 1
12
22
...
n2
... 1n x1
... 2n x 2
.
... ... ...
... nn x n
11
2
Определение. Матрица Φ 1
...
n
1
12 ... 1n
22 ... 2n
называется матрицей линейного оператора в базисе
... ... ...
n2 ... nn
e . Ранг матрицы Φ называется рангом линейного оператора .
8.3.3. Теорема. Если базис-строка e (e1 , e2 ,..., en ) преобразуется по закону e eA , то матрица Φ
1
линейного оператора преобразуется по закону Φ A ΦA .
8.3.4. Определение. Пусть линейный оператор , матрица которого Φ, действует в линейном пространстве V . Вектор
ряет двум условиям:
x V называется собственным вектором оператора (матрицы Φ), если он удовлетво-
x 0 , x x , Ј .
называется собственным числом линейного оператора (матрицы Φ).
8.3.5. Теорема. Линейный оператор, действующий в линейном пространстве Vn , имеет n собственных
При этом число
чисел (с учетом кратностей корней).
§ 8.4. Квадратичные формы
8.4.1. Определение Однородный многочлен
f ( x , x ) ai j xi x j ,
коэффициенты которого удовлетворяют условию ai j a j i , называется квадратичной формой, а симметричная
матрица
A ai j
называется матрицей этой квадратичной формы.
8.4.2. Определение. Рангом квадратичной формы называется ранг ее матрицы.
8.4.3. Определение. Если квадратичная форма записана в виде
1 x1 2 x 2 ... n x n ,
2
2
2
то говорят, что она приведена к диагональному виду.
8.4.4. Теорема. Всякая ненулевая квадратичная форма за конечное число шагов может быть приведена к
диагональному виду.
8.4.5. Определение. Запись
f ( z1 ) 2 ... ( z p ) 2 ( z p 1 ) 2 ... ( z p s ) 2 0( z p s 1 ) 2 ... 0( z n ) 2
называется нормальной записью квадратичной формы f .
Число p называется положительным индексом формы f , число
s – отрицательным индексом, число
r p s (количество ненулевых слагаемых) называется рангом квадратичной формы, а число d n r –
дефектом формы f .
8.4.6. Теорема. Ранг квадратичной формы равен рангу ее по определению 8.4.2 (то есть рангу матрицы
квадратичной формы).
20
Следствие. Ранг квадратичной формы не зависит от способа приведения ее к нормальному виду.
8.4.7. Теорема. Положительный индекс квадратичной формы не зависит от способа приведения ее к
нормальному виду.
8.4.8. Определение. Квадратичная форма f ( x , x ) называется положительно определенной, если для
всякого ненулевого вектора x имеем f ( x , x ) 0 . Матрицу положительно определенной квадратичной формы
называют положительно определенной матрицей.
8.4.9. Теорема. Для того, чтобы квадратичная форма была положительно определена, необходимо и достаточно, чтобы ее положительный индекс равнялся размерности пространства.
8.4.10. Определение. Угловым минором порядка k квадратичной формы f называется минор, расположенный в первых k строках и в первых k столбцах матрицы данной квадратичной формы, то есть угловой
минор матрицы квадратичной формы.
Ясно, что квадратичная форма в n -мерном пространстве имеет n угловых миноров.
8.4.11. Теорема. Квадратичная форма F ( x , x ) положительно определена тогда и только тогда, когда
каждый ее угловой минор положителен.
8.4.12. Теорема. Пусть квадратичная форма f ( x , x ) имеет матрицу A . Пусть 1 , 2 ,..., n – собственные числа матрицы A , и
e1 , e2 ,.., en – собственные векторы той же матрицы, причем каждый из этих век-
торов имеет единичный скалярный квадрат. Если перейти к базису
e e1 , e2 ,.., en , то в новых координатах
z , отвечающих новому базису, квадратичная форма примет диагональный вид
z z ... z .
i
1 2
1
2 2
n 2
2
n
8.4.13. Определение. Описанный выше процесс приведения квадратичной формы к диагональному виду называется приведением квадратичной формы к главным осям.
§ 8.5. Скалярное произведение в линейном пространстве
8.5.1. Определение. Скалярным произведением в линейном пространстве V называется вещественнозначная функция двух векторных аргументов (обозначаемая ab ), если она обладает следующими свойствами:
ab ba ,
a b c ac bc ,
a b ab ,
a
8.5.2. Пусть в пространстве
a2 0 ,
2
0 a 0 ,
V задан базис e (e1 , e2 ,..., en ) , и
gij eie j , i, j 1,..., n .
Тогда для векторов x x ei , y y ei имеем равенство
i
i
xy gij xi y j .
8.5.3. Скалярный квадрат есть квадратичная форма
x2 gij xi x j .
8.5.4. Определение. Линейное пространство со скалярным произведением называется евклидовым линейным пространством.
8.5.5. Определение. Базис e (e1 , e2 ,..., en ) в евклидовом линейном пространстве называется декартовым базисом, если
1, åñëè i j
ei e j ij
.
0, åñëè i j
8.5.6. Если базис в евклидовом пространстве ортонормирован, то
xy x1 y1 x 2 y 2 ... x n y n , x2 ( x1 )2 ( x 2 )2 ... ( xn )2 .
8.5.7. Определение. Определителем Грама системы векторов
x1x1
x 2 x1
G (x1 , x 2 ,..., x m )
...
x m x1
x1x 2
x2 x2
...
x1, x2 ,..., xm называется величина
... x1x m
... x 2 x m
.
...
...
x m x 2 ... x m x m
21
8.5.8. Теорема. Определитель Грама – неотрицательная величина, равная нулю тогда и только тогда,
когда система векторов линейно зависима.
xx xy
G ( x, y )
0,
8.5.9. В частности,
yx yy
причем обращение в нуль равносильно пропорциональности векторов x и y .
8.5.10 Следствием этого неравенства является неравенство Коши-Буняковского
(xy)2 xx yy .
8.5.11. Если базис декартов, то указанное неравенство имеет вид
( x1 y1 x2 y2 ... xn yn ) 2 ( x12 x22 ... xn2 )( y12 y22 ... yn2 ) ,
причем равенство имеет место для пропорциональных векторов (и только для них).
8.5.12. Для ненулевых векторов x , y из неравенства Коши-Буняковского с очевидностью следует, что
xy
1
1.
xx yy
Это дает основание для следующего определения.
8.5.13. Определение 7.9. Углом между ненулевыми векторами x , y евклидова линейного пространства
называется число
def
xy
.
xy arccos
xx yy
8.5.14. Заметим, что натуральный базис арифметического пространства
8.5.15 Определение. Скалярное произведение в пространстве
Ў n – декартов.
Ў n , определяемое формулой
x y x y x y ... x y , называется естественным скалярным произведением в этом пространстве. Его
1 1
2
2
n
n
матричная запись такова:
x y xT y .
8.5.16. Определение. Преобразование базиса линейного пространства называется ортогональным, если
оно каждый декартов базис переводит в декартов базис.
8.5.17. Теорема. Преобразование базиса ортогонально тогда и только тогда, когда матрица преобразо1
вания – ортогональная матрица C , то есть матрица, удовлетворяющая условию C C .
8.5.18. Теорема. Ортогональные преобразования базиса образуют группу преобразований (очевидно,
изоморфную группе ортогональных матриц).
T
Это группа называется ортогональной группой
O n, Ў .
8.5.19. Инвариантами ортогональной группы являются, конечно, все инварианты полной линейной
группы, а также скалярное произведение – и все величины, которые можно выразить через скалярные произведения.
8.5.20. Концепция Феликса Клейна. Геометрией группы G , действующей в пространстве M , называется совокупность
сительно группы
G тех свойств всевозможных фигур в пространстве M , которые инвариантны отно-
G . Если G1 – подгруппа группы G , то соотношение групп и геометрий таково:
G1 G G1 G .
ГЛАВА 9. ЭЛЕМЕНТЫ МНОГОМЕРНОЙ ГЕОМЕТРИИ. ПЛОСКОСТИ (9 ЧАСОВ)
§ 9.1. Аффинное пространство
9.1.1. Определение. Точечно-векторным (аффинным) пространством называется алгебраическая струк-
тура
V
U ,V , , где U A, B, C,... – множество элементов (произвольной природы), именуемых «точками»,
– линейное пространство (его векторы пусть обозначены a, b, c,... ),
:U U V ,
причем должны быть выполнены приведенные ниже аксиомы. Для более удобной записи аксиом обозначим
( A, B ) AB .
1.
Av !B AB v . (аксиома откладывания вектора из точки).
2.
ABC AB BC CA 0 . (аксиома треугольника).
22
A . Если
9.1.2. Обозначения и определение. Аффинное пространство обозначается буквой
dimV n , то аффинное пространство называется n-мерным и обозначается An .
9.1.3. Определение. Репером в аффинном пространстве
An
называется объект
O
,
e
,
e
,...,
e
1 2
n.
ò î ÷êà
áàçèñ
9.1.4. Определение. Радиус-вектор точки относительно репера.
9.1.5. Определение. Координаты точки в репере.
– координаты новой вершины репера при неизменном базисе, x – координаты точки М в исходном репере, и x – координаты той же точки в новом репере, то x x c .
i
i i
9.1.7. Теорема. Если «старый» базис ei и «новый» базис ei связаны соотношением e Ai e ,
i
i
9.1.6. Теорема. Если ñ
i
i
и вершина «нового» репера имеет в «старом» репере координаты
вом» репере связаны с координатами
i
i
c , то координаты x точки М в «ноi
i
x той же точки в «старом» репере соотношением x
i
9.1.8. Определение. Аффинным преобразованием пространства
An An , заданное соотношениями
An
i
Aii x i c i .
называется отображение
xi aij x j a0i , (i, j 1,..., n) ,
где
det aij 0 .
9.1.9. Теорема. Аффинные преобразования n -мерного аффинного пространства образуют полную аффинную группу GA( n, Ў ) .
9.1.10. Определение. Аффинной геометрией называется теория свойств фигур, сохраняющихся при любом аффинном преобразовании.
An
9.1.11. Определение. Эквиаффинным преобразованием пространства
называется такое аффинное
преобразование, которое для векторного базиса является унимодулярным.
Таким образом, эквиаффинное преобразование задается соотношениями
xi aij x j a0i , (i, j 1,..., n) ,
где det ai
j
1 .
9.1.12. Теорема. Эквиаффинные преобразования n -мерного аффинного пространства образуют специальную аффинную группу SA(n, Ў ) .
9.1.13. Определение. Аффинное пространство, в котором действует специальная аффинная группа,
называется эквиаффинным пространством An .
An является n -мерный объем.
9.1.14. Основным инвариантом в пространстве
9.1.15. Аффинное пространство можно построить, применив к линейному пространству
«удвоения». Именно, строим структуру
U ,V , так, что U
U B bi , то ( A, B) AB bi a i V
n
n
,
V
n
n
процедуру
,
, и если U A a
i
. В дальнейшем будем иметь в виду именно это аффин-
ное пространство.
§ 9.2. Евклидово пространство
9.2.1. Определение. Евклидовым
n -мерным пространством En называется n -мерное аффинное про-
странство с определенным в нём скалярным произведением.
9.2.2. Евклидово пространство можно отнести к любому аффинному реперу. Однако удобнее – к реперу
с декартовым базисом.
23
9.2.3. Определение. В пространстве
En расстоянием между точками A и B называется число
2
AB AB .
9.2.4. Основной инвариант евклидова пространства – расстояние между точками.
9.2.5. Соотношение рассматриваемых нами групп и соответствующих им геометрий:
GA(n, Ў)
SA(n, Ў)
àô ô èí í àÿ ýêâèàô ô èí í àÿ
ãåî
ì
åòðèÿ
ãåî ì åòðèÿ
ãðóï ï à
äâèæ åí èé
.
åâêëèäî âà
ãåî ì åòðèÿ
§ 9.3. Плоскости в многомерном пространстве
Wk
размерности k . Множество всех точек M пространства An , для которых M 0 M Wk , называется k мерной плоскостью Lk , проходящей через точку M 0 в направлении подпространства Wk .
9.3.2. Определение. Для k -мерных плоскостей Lk применяют следующие названия:
9.3.1. Определение. Пусть в пространстве
An
заданы точка
M0
и линейное подпространство
при k 0 – точка,
при k 1 – прямая,
при k 2 – плоскость,
……………………….
при k n 1 – гиперплоскость.
Отметим, что
Ln An .
У нас слово «плоскость» будет сокращением термина
9.3.3. Теорема.
пространством.
k -мерная плоскость.
k -мерная плоскость аффинного пространства сама является k -мерным аффинным
9.3.4. Теорема. Пусть
a1, a2 ,..., ak – базис k -мерной плоскости Lk , проходящей через точку
M 0 . Тогда для всякой точки M Lk
найдутся однозначно определяемые числа
u1, u 2 ,..., u k
такие, что
M M 0 u ai , (i 1,..., k ) .
9.3.5. Определение. Приведенное здесь соотношение называется векторным параметрическим уравне-мерной плоскости.
i
нием
k
9.3.6. Замечание. Векторное параметрическое уравнение
параметрических уравнений в координатах:
k -мерной плоскости равносильно системе
xi x0i ui aij , i 1,..., n; j 1,..., k .
k -мерной плоскости в координатах.
An всякая k -мерная плоскость может быть задана системой независи-
Они называются параметрическими уравнениями
9.3.7. Теорема. В пространстве
мых линейных уравнений вида
bi j x i b0j 0 , (i 1,..., n, j 1,..., n k ) .
9.3.8. Следствие. Гиперплоскость в пространстве
An
может быть задана уравнением вида
bi x b0 0 .
i
9.3.9. Задача. В пространстве
An написать уравнение гиперплоскости, проходящей через точку M 0 и
имеющей направляющее подпространство с базисом
a1, a2 ,..., an1 .
Решение. R M0 , a1, a2 ,..., an1 0 .
9.3.10. Теорема. В пространстве
En уравнение R M0 a 0 при a 0 определяет гиперплоскость.
9.3.11. Теорема. Если координаты в пространстве
An
i
i
преобразуются по закону x Ai
i
x
i
c i , то
i
уравнение гиперплоскости bi x b0 0 перейдет в уравнение bi x b0 0 , где bi Aibi , b0 c Ai b0 .
i
i
i
24
9.3.12. Следствие 1. Если уравнение гиперплоскости bi x b0 0 , то объект
i
ковектор
b
n
(b1 , b2 ,..., bn ) есть
.
9.3.13. Следствие 2. Уравнение гиперплоскости в пространстве
bx b0 0 .
9.3.14. Пример. Пространство
1). 0-мерная плоскость (точка)
уравнений, задающая точку:
An
может быть записано в виде
A2 (аффинная плоскость).
M 0 ( x0 , y0 ) . Направляющее подпространство нульмерное. Система
x x0
.
y y0
2). 1-мерная плоскость (прямая, она же гиперплоскость). Векторное параметрическое уравнение
M M0 ta , a 0 . Направляющее подпространство
a
. Параметрические уравнения в координатах:
x x0 ta
. Система уравнений, задающих прямую, состоит из одного уравнения b1 x b2 y b0 0 ,
2
y y0 ta
1
причем
b1, b2 0,0 .
9.3.15. Пример. Пространство
1). 0-мерная плоскость (точка)
A3 .
M 0 ( x0 , y0 , z0 ) .
2). 1-мерная плоскость (прямая). Векторное параметрическое уравнение M M0 ta , a 0 . Направляющее подпространство
a
x x0 ta1
. Параметрические уравнения в координатах: y y0 ta 2 , где
3
z z0 ta
b11 x b21 y b31 z b01 0
b11
уравнений, задающая прямую:
, причем Rang 2
2
2
2
2
b1
b1 x b2 y b3 z b0 0
b21
b31
b22 b32
a1 0
2
a 0 . Система
a3 0
2.
3). 2-мерная плоскость (плоскость). Векторное параметрическое уравнение M M 0 t1a1 t 2a 2 ,
Rang a1, a2 2 . Направляющее подпространство a1 , a2
x x0 t1a11 t 2 a12
a11
2
1 2
2 2
y y0 t a1 t a2 , где Rang a1
1 3
2 3
a13
z z0 t a1 t a2
уравнения b1 x b2 y
. Параметрические уравнения в координатах:
a12
a22 2 . Система уравнений, задающая плоскость, состоит из одного
a23
b3 z b0 0 , причем b1 , b2 , b3 0,0,0 .
(2)
L(1)
k , Lm называется плоскость наибольшей размер(1) (2)
ности, содержащаяся в каждой из этих плоскостей. Обозначается Lk Lm . Очевидно, что
9.3.16. Определение. Пересечением плоскостей
(2)
(1)
(2)
L(1)
k Lm M M Lk & M Lm .
9.3.17. Замечание. Если каждая из плоскостей
(2)
L(1)
k , Lm задана системой уравнений, то вопрос о пере-
сечении решается очевидным образом.
L(1)
k проходит через точку M 0 в направлении линейного подпространства
a1 , a2 ,..., a k , а плоскость L(2)
m – через точку K 0 в направлении линейного подпространства
b1 , b2 ,..., bm . Общая точка этих плоскостей R удовлетворяет уравнениям
9.3.18. Пусть плоскость
R M 0 u i ai , (i 1,..., k ) , R K 0 v b , ( 1,..., m) .
Исключая R , получаем уравнение
K 0 M 0 u i ai v b
25
u1
...
uk
относительно вектора w 1 , высота которого равна
v
...
m
v
k m.
(2)
9.3.19. Теорема. L(1)
k Lm M 0 K 0 a1 , a 2 ,..., a k , b1 , b 2 ,..., b m
.
9.3.20. Замечание. Данной теореме можно дать иную формулировку:
Rang M0 K 0 , a1 , a2 ,..., ak , b1 , b2 ,..., b m
(2)
L(1)
k Lm
Rang a , a ,..., a , b , b ,..., b
1
2
k
1
2
m
9.3.21. Пусть последнее условие выполнено, и пусть
C
– точка пересечения плоскостей
(2)
L(1)
k , Lm .
Принимаем её за начальную точку каждой из этих плоскостей и убеждаемся в справедливости следующего
утверждения.
Теорема. Если плоскости имеют непустое пересечение, то размерность пересечения плоскостей равна
размерности пересечения направляющих подпространств этих плоскостей.
9.3.22. Определение. Суммой плоскостей
(2)
L(1)
k , Lm называется плоскость наименьшей размерности
(2)
L(1)
k Lm , содержащая каждую из этих плоскостей.
(1)
9.3.23. Теорема. Пусть плоскость Lk проходит через точку M 0 в направлении линейного подпро(2)
странства a1 , a 2 ,..., a k , а плоскость Lm – через точку K 0 в направлении линейного подпространства
b1 , b 2 ,..., b m
. Тогда плоскость
(2)
L(1)
k Lm
проходит через точку
M0
(и через точку
K 0 ) в направлении
линейного подпространства
M0 K 0 , a1 , a2 ,..., ak , b1, b2 ,..., b m
.
9.3.24. Следствие.
(2)
dim L(1)
k Lm Rang M 0 K 0 , a1 , a 2 ,..., a k , b1 , b 2 ,..., b m .
4
9.3.25. Пример. В пространстве
даны две плоскости:
1
x1 1
0
2
x1 0
0
0
x 0 u1 0 u 2 0 ,
2
1
.
L(1)
:
2
0
x
x3 0
0
1
(2)
v1 v 2 1
L
:
2
4
x3 0
0
1
1
0
x 0
4
1
0
0
x
Исключая параметры
u i , vi , получаем системы уравнений для плоскостей.
1
4
x x 1 0
L : 2
,
x 0
(1)
2
Пересечение
(2)
L(1)
k Lm
есть прямая
1 0 1 0 0 0
0 0 , 0 , 0 , 1 , 1
0 0 0 1 0 1
0 1 1 0 0 0
1
x 0
L : 4
.
x 1
(2)
2
x1 x2 x 4 1 0 . Для отыскания суммы плоскостей заметим, что
1 0 0
0 , 0 , 1
0 1 0
1 0 0
. Следовательно,
x1 1
1
0
0
2
(2)
x 0 t1 0 t 2 0 t 3 1 . Исключая параметры t i , получаем уравнение гиперплоскости
L(1)
k Lm :
x3 0
0
1
0
4
1
0
0
x 0
(2)
L(1)
k Lm
в виде
x1 x 4 1 0 .
§ 9.4. Угол между плоскостями в
n -мерном евклидовом пространстве
26
(1)
(2)
9.4.1. Пусть в евклидовом пространстве заданы плоскости Lk и Lm . Для произвольного одномерного
(1)
направления l1
l l
(1) (2)
1 1
( 2)
первой плоскости и произвольного одномерного направления l1
второй плоскости символом
обозначим угол между этими направлениями.
(1)
(2)
Определение. Стационарным углом между плоскостями Lk и Lm называется экстремум функции
l l
(1) (2)
1 1
(1)
(2)
L(1)
L(2)
k , l1
m .
по переменным направлениям l1
Замечание. Как правило, вычисляют экстремумы не угла, а его косинуса.
(1)
(2)
9.4.2. Пусть в каждой из плоскостей Lk и Lm . указан декартов базис: в первой – базис
а во второй – базис
g1, g2 ,..., gm . Рассмотрим вектор a u1e1 u 2e2 ... u k ek
k
(u )2 1,
b v1g1 v 2 g 2 ... v m g m . Векторы a и b единичные, если
(1) (2)
Таким образом, экстремальные значения величины cos l1 l1
мумы функции
1
m
e1, e2 ,..., ek ,
и вектор
(v )
2
1.
1
могут быть вычислены как условные экстре-
f u1 , u 2 ,..., u k , v1 , v 2 ,..., v m ab
при ограничениях
k
(u )2 1,
1
m
(v )
2
1.
1
9.4.3. Эффективным методом решения поставленной задачи является метод неопределенных множителей Лагранжа.
4
9.4.4. Пример. В пространстве
e1, e2 , для другой – g1 ,g2 , причем
заданы две двумерные плоскости. Для одной из них декартов базис
1
0
2
2
1 2
1 2
1 0
1 1
, e2
, g1
, g2
.
e1
3 0
3 1
3 2
3 2
2
2
1
0
4 1 2 1 2
1
2
1
2
Вычисляем векторы a u e1 u e 2 , b v g1 v g 2 . Видим, что ab u u v v .
9
Следовательно, лагранжиан имеет вид
4
F u1u 2 v1v2 (u1 )2 (u 2 )2 1 (v1 )2 (v 2 )2 1 .
9
2
2
Действия, обычные для метода Лагранжа, приводят к системе уравнений
4 1
4 2
4 1
v u1 0,
v u 2 0,
u v1 0,
9
9
9
4 2
u v 2 0, (u1 )2 (u 2 ) 2 1, (v1 ) 2 (v 2 ) 2 1.
9
Вещественные решения системы и соответствующие значения целевой функции сведем в таблицу.
u1
u2
v1
v2
1
0
1
0
1
0
1
0
1
0
1
0
4
9
4
9
4
9
4
9
4
9
4
9
ab
4
9
4
9
4
9
27
1
1
0
0
4
9
4
9
4
9
9.4.5. Замечание к примеру. Экстремальные значения косинуса угла можно найти без метода Лагранжа. Полагаем
u1 cos t , u 2 sin t , v1 cos k , v 2 sin k .
Теперь ab
4
cos t k , и экстремальные значения очевидны6.
9
ГЛАВА 10. ГИПЕРПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
В МНОГОМЕРНОМ ПРОСТРАНСТВЕ (9 ЧАСОВ)
§ 10.1. Центр квадрики
10.1.1. Определения. Квадрикой Q в пространстве
An называется множество точек, координаты кото-
рых (в некотором репере) удовлетворяют уравнению
aij xi x j 2ai xi a 0 i, j 1,..., n ,
причем матрица A aij – симметричная и ненулевая. Ранг матрицы A называется малым рангом квадрики
и обозначается rang (Q ) . Ранг матрицы
%
A
aij
aj
ai
называется большим рангом квадрики и обозначается
a
RANG (Q ) .
10.1.2. Заметим, что если в уравнении квадрики
aij xi x j 2ai xi a 0 i, j 1,..., n обращаются в
нуль коэффициенты при первых степенях переменных, то начало координат является центром симметрии (про-
. Новые координаты пусть y . Тогда
сто «центром») квадрики. Переносим начало координат в точку C c
i
i
xi yi ci . Требование, чтобы уравнение квадрики в новых координатах не содержало первых степеней переменных, приводит к уравнениям
aij c j ai 0
i, j 1,..., n .
10.1.3. Определение. Квадрика называется центральной, если у неё есть центр, и притом один. Если же
центра нет, либо он имеется, но не единственный, то квадрика называется нецентральной.
§ 10.2. Пересечение квадрики с прямой
10.2.1. Пусть x x Ў ,
i
n
a ai Ў n . Тогда уравнение квадрики в матричной форме запишется
так:
x T Ax 2ax a 0 .
10.2.2. Рассмотрим в пространстве An прямую m : x x0 ct . Подставляя в уравнение квадрики, получим уравнение на параметр t :
Kt 2 2 pt q 0 ,
где
K c T Ac ,
p c T Ax0 ac , q x0T Ax0 2ax0 a .
10.2.3. Определение. Если направление прямой m (определяемое вектором c ) таково, что K 0 , то
такое направление называется асимптотическим направлением для квадрики.
Схема тех случаев, которые реализуются для уравнения 10.2.2.
Здесь использована тригонометрическая параметризация окружности (поскольку базис содержит два вектора).
Если же базис содержит m векторов, то потребуется параметризация (m 1) -мерной сферы, что не является
препятствием.
6
28
уравнение
Kt 2 pt q 0
K 0
K=0
Направление
неасимптотическое
Корни t1 ,t 2
Вещественные,
различные
(пересекает)
Комплексносопряженные
Направление
асимптотическое
p 0, q 0
p0
Одинаковые
(касается)
Одна точка
Нет точек
p 0, q 0
Прямолинейная
образуюшая
10.2.4. Определение. Прямая, принадлежащая квадрике, называется прямолинейной образующей
квадрики.
10.2.5. Теорема. Асимптотическое направление квадрики не зависит от выбора репера.
10.2.6. Пример. Пусть n 2 . Уравнение асимптотических направлений
a11 c1 2a12c1c 2 a22 c 2 0 .
2
Обозначим
2
a11
a12
a21 a22
2
. Обнаруживаем три возможности:
2 0 (мнимые направления) – эллиптическая квадрика,
2 0 (вещественные различные направления) – гиперболическая квадрика,
2 0 (вещественные совпавшие направления) – параболическая квадрика.
i
имеют комплексно-сопряженные соответствующие
i
10.2.7. Заметим, что если точки M 1 x1 , M 2 x2
координаты, то середина отрезка
M1M 2 имеет вещественные координаты.
Теорема. Пусть зафиксировано направление прямой
m : x x0 ct , причем каждая прямая данного
направления пересекает квадрику Q в двух точках (они могут быть и комплексно сопряженными). Середины
хорд принадлежат гиперплоскости
D Q, c : ci aij x j ai 0 .
D Q, c называется диаметральной гиперплоскостью, сопряженной направлению c относительно квадрики Q .
10.2.9. Теорема. Если квадрика Q центральная, то гиперплоскость D Q, c проходит через центр
10.2.8. Определение. Гиперплоскость
квадрики.
10.2.10. Заметим, что если квадрика в евклидовом пространстве, то коэффициенты уравнения гиперплоскости
D Q, c суть координаты нормального вектора n этой гиперплоскости.
Определение. Направление называется главным направлением квадрики, если диаметральная гиперплоскость, сопряженная данному направлению, ему ортогональна.
10.2.11. Теорема. Главные направления квадрики
Q : aij xi x j 2ai xi a 0 i, j 1,..., n
параллельны собственным векторам матрицы A aij .
позволяет всяким двум векторам x x , y y сопо-
10.2.12. Симметричная матрица A aij
i
i
def
ставить число
xy A aij xi y j . Полученная вещественнозначная функция двух векторных аргументов обладает
всеми свойствами скалярного произведения кроме неотрицательности квадрата и невырожденности. Будем
называть величину xy A псевдоскалярным произведением относительно матрицы A .
29
10.2.13. Определение. Пусть имеем квадрику
ния векторов
Q : aij xi x j 2ai xi a 0 i, j 1,..., n . Направле-
x 0 , y 0 называются сопряженными относительно квадрики, если xy A 0 , где A aij .
Иными словами, сопряженные направления псевдооортогональны относительно матрицы A .
0 , то для отыскания сопряженного вектора y y
10.2.14. Если зафиксировать вектор x x
имеем уравнение y
i
i
a x 0 . Если это уравнение становится тождеством, то есть если
i
j
ij
aij x j 0, i, j 1,..., n , то будем говорить, что направление вектора x особое. Особые направления находятся из системы условий
a x1 a x 2 ... a x n 0,
12
1n
11
a21 x1 a22 x 2 ... a2 n x n 0,
...........................................
1
2
n
an1 x an 2 x ... ann x 0,
x1 , x 2 ,..., x n 0,0,...,0 .
10.2.15. Теорема. Векторы, принадлежащие особым направлениям, составляют линейное подпространство, размерность которого равна n Rang ( A ) .
§ 10.3. Касательная гиперплоскость квадрики
10.3.1. Дана квадрика
Q : aij xi x j 2ai xi a 0 i, j 1,..., n
и точка M 0 x0 Q . Тогда
i
aij x0i x0j 2ai x0i a 0 .
Пусть прямая m : x xi c t неасимптотического направления касается квадрики. Тогда уравнение
i
0
i
t 2 aij c i c j 2 aij x0i c j ai c i t aij x0i x0j 2ai x0i a 0
144444442 44444443
ðàâí î í óëþ
должно иметь кратный корень. Следовательно, a x ai c 0 .
j
ij 0
i
10.3.2. Определение. Точка M 0 x0 Q называется особой точкой квадрики, если в этой точке уравi
нение aij x0 ai c 0 есть тождество.
j
i
j
aij x0 ai 0
10.3.3. Критерий особой точки:
i, j 1,..., n .
i j
i
a
x
x
2
a
x
a
0
ij
0
0
i
0
j
aij x0 ai 0
Ему можно придать равносильную форму
i, j 1,..., n .
i
ai x0 a 0
10.3.4. Определение. Квадрика называется вырожденной, если на ней имеется хотя бы одна особая точка, и невырожденной, если на ней нет ни одной особой точки.
10.3.5. Теорема. Квадрика Q невырожденная тогда и только тогда, когда
n 1
a11 ... a1n
a1
...
...
...
an1 ... ann
an
a1
a
...
...
an
% 0.
det A
10.3.6. Теорема. Касательные прямые квадрики в неособой точке заполняют гиперплоскость
a x
j
ij 0
ai
ai x i x0i 0 .
10.3.7. Особенно просто выглядит последнее уравнение, если квадрика приведена к центру (тогда
0 ):
30
aij x0i x j a 0 i, j 1,..., n .
§ 10.4. Аффинная классификация квадрик
Рассматривается квадрика
форма
Q : aij xi x j 2ai xi a 0 i, j 1,..., n . С нею связана квадратичная
f aij xi x j . Пусть r – ранг формы f (он же – малый ранг квадрики Q ).
10.4.1. Лемма 1. Аффинным преобразованием уравнение квадрики приводится к виду
1 2
2 2
r 2
i
%
%
1 ( x%
) 2 ( x%
) ... r ( x%
) b%
1, 1 ( 1,..., r ) .
i x a 0,
10.4.2. Лемма 2. Переносом вершины репера полученное уравнение приводится к виду
1 2
2 2
r 2
r 1
n
%
%
1 ( x%
) 2 ( x%
) ... r ( x%
) b%
... b%
r 1 x
nx c 0 .
10.4.3. Следует различать следующие случаи.
%
%
b%
r 1 br 2 .. bn 0 . Тогда полученное в 10.4.2. уравнение имеет вид
1 2
2 2
r 2
1 ( x%
) 2 ( x%
) ... r ( x%
) c 0
2
2
2
% b% .. b% 0 . Тогда полученное в 10.4.2. уравнение заменой репера приводится к виду
2). b
r 1
r 2
n
1 2
2 2
r 2
r 1
1 ( x%
) 2 ( x%
) ... r ( x%
) 2 x%
1).
10.4.4. Теорема. Надлежащим выбором аффинного репера уравнение квадрики приводится к одному из
следующих видов7.
1 2
2 2
n 2
1 ( x%
) 2 ( x%
) ... n ( x%
) 1,
1 2
2 2
n 2
1 ( x%
) 2 ( x%
) ... n ( x%
) 0,
1 2
2 2
r 2
1 ( x%
) 2 ( x%
) ... r ( x%
) 1, r n ,
1 ( %
x1 ) 2 2 ( %
x 2 ) 2 ... r ( %
x r ) 2 0, r n ,
1 2
2 2
n 1 2
n
1 ( x%
) 2 ( x%
) ... n 1 ( x%
) 2 x%
,
1 2
2 2
r 2
r 1
1 ( x%
) 2 ( x%
) ... r ( x%
) 2 x%
, r n.
10.4.5. Для линий второго порядка данная схема классификации приводит к следующей таблице. Упорядочение линий основано на большом ранге R и малом ранге r .
R
r
Каноническое уравнение
3
2
x y 1
Название
эллипс
3
2
x2 y 2 1
мнимый эллипс
3
2
x2 y 2 1
гипербола
3
1
x2 2 y
парабола
2
2
x2 y 2 0
крест
2
2
x2 y 2 0
мнимый крест
2
1
пара параллельных прямых
2
1
1
1
x2 1
x 2 1
x2 0
2
2
пара мнимых параллельных прямых
двойная прямая
§ 10.5. Метрическая классификация квадрик
Рассматривается квадрика
форма
Q : aij xi x j 2ai xi a 0 i, j 1,..., n . С нею связана квадратичная
f aij xi x j . Пусть r – ранг формы f (он же – малый ранг квадрики Q ).
10.5.1. Лемма 1. Ортогональным преобразованием уравнение квадрики приводится к виду
Мы можем считать, что множители i упорядочены таким образом, что первые их подряд идущие значения
равны 1, а следующие за ними равны 1 (если такие есть).
7
31
1 2
2 2
r 2
i
%
%
1 ( x%
) 2 ( x%
) ... r ( x%
) b%
Ў, ( 1,..., r ) .
i x a 0,
10.5.2. Лемма 2. Переносом вершины репера полученное уравнение приводится к виду
1 2
2 2
r 2
r 1
n
%
%
1 ( x%
) 2 ( x%
) ... r ( x%
) b%
... b%
r 1 x
nx c 0.
10.5.3. Следует различать следующие случаи.
%
%
b%
r 1 br 2 .. bn 0 . Тогда полученное в 10.5.2. уравнение имеет вид
1 2
2 2
r 2
1 ( x%
) 2 ( x%
) ... r ( x%
) c 0
2
2
2
%
%
%
2). b
r 1 br 2 .. bn 0 . Тогда полученное в 10.5.2. уравнение заменой репера приводится к виду
1 2
2 2
r 2
r 1
1 ( x%
) 2 ( x%
) ... r ( x%
) 2bx%
.
1).
10.5.4. Теорема. Надлежащим выбором декартова репера уравнение квадрики приводится к одному из
следующих видов8.
1 2
2 2
n 2
h1 ( x%
) h2 ( x%
) ... hn ( x%
) 1,
1 2
2 2
n 2
h1 ( x%
) h2 ( x%
) ... hn ( x%
) 0,
r 2
h1 ( %
x1 ) 2 h2 ( %
x 2 )2 ... hr ( x%
) 1, r n ,
1 2
2 2
r 2
h1 ( x%
) h2 ( x%
) ... hr ( x%
) 0, r n ,
1 2
2 2
n 1 2
n
h1 ( x%
) h2 ( x%
) ... hn 1 ( x%
) 2 x%
,
1 2
2 2
r 2
r 1
h1 ( x%
) h2 ( x%
) ... hr ( x%
) 2 x%
, rn.
10.5.5. Для линий второго порядка данная схема классификации приводит к следующей таблице. Упорядочение линий основано на большом ранге R и малом ранге r .
R
r
Каноническое уравнение
2
3
2
3
2
3
2
3
1
x
y
2 1
2
a
b
2
x
y2
1
a 2 b2
x2 y 2
1
a 2 b2
x 2 2 py
2
мнимый эллипс
гипербола
парабола
2
1
пара параллельных прямых
1
x a , a 0
пара мнимых параллельных прямых
1
x 0
двойная прямая
2
2
2
2
1
эллипс
x
y
2 0
2
a
b
2
x
y2
0
a 2 b2
x2 a2 , a 0
2
2
Название
2
2
2
крест
мнимый крест
2
§ 10.6. Метрические инварианты квадрик
10.6.1. Теорема. Коэффициенты характеристического многочлена матрицы инвариантны относительно
ортогональной группы.
10.6.2. Рассматриваем многочлен
F aij xi x j ai xi a, aij a ji i, j 1,..., n .
Мы можем считать, что множители hi упорядочены таким образом, что первые их подряд идущие значения
положительны, а следующие за ними отрицательны (если такие есть).
8
32
Заметим, что многочлен однозначно определяет квадрику, но обратное неверно: при умножении всех коэффициентов многочлена на одно и то же число, отличное от нуля, изменится многочлен, но не квадрика. С многочленом связаны следующие матрицы:
A ( n ) aij ,
A( n1)
aij
aj
ai
.
a
Введем в рассмотрение следующие векторы:
x1
2
x
x
...
n
x
x1
...
n
, X n
x
1
n 1
Тогда
f aij xi x j xT A( n ) x , F X T A( n1) X .
10.6.3. Пусть C( n ) – ортогональная матрица порядка
C( n1)
n . Тогда матрица
C( n )
0
0
1
также ортогональная. Действие ортогональной группы на векторы
x и X таково:
x C( n ) x , X C( n 1) X .
Соответственно, матрицы A ( n ) и A ( n1) при этом преобразуются так:
A( n) C(Tn) A( n)C( n) ,
A( n1) CT( n1) A(n1)C(n1) .
10.6.4. Теорема. Коэффициенты характеристических уравнений матриц A ( n ) , A ( n1) являются ортогональными инвариантами многочлена
F X T A( n1) X .
10.6.5. Заметим, что каждый инвариант, о котором здесь идет речь, сам является однородным многочленом относительно элементов матрицы A ( n1) .
Определение. Если инвариант M есть многочлен степени
k относительно чисел aij , ai . a , то будем
(k )
обозначать его M
и говорить, что его вес равен k .
10.6.6. Ясно, что отношение двух инвариантов одинакового веса является инвариантом не только многочлена
F X T A( n1) X , но и той квадрики, которая определена уравнением
F X T A( n1) X 0 .
10.6.7. Обозначим i
(1)
, i
( 2)
инварианты матрицы A (2) , а символами J
(1)
, J
(2)
, J
(3)
– инварианты
матрицы A (3) . Тогда для различных типов многочленов, находящихся в левой части уравнения (после приведения к виду, близкому к каноническому), получим следующие значения инвариантов (приводим и традиционные
их обозначения)
i1 S
i2
J1
J2 K
J3
a11 x a22 y a33
a11 a22
a11a22
a11 a22 a33
a22 a33 a11a33 a11a22
a11a22 a33
a22 y 2 2a13 x
a22
0
a22
a132
a132 a22
a11 x 2 a33
a11
0
a11 a33
a11a33
0
2
2
10.6.8. Из таблицы видно, какой вид принимает многочлен при различных сочетаниях значений
i2 и
J3 :
многочлен
i2 0
1 x 2 2 y 2
пояснение
1 , 2 – корни уравнения z 2 i1 z i2 0 .
33
i2 0, J 3 0
Sy 2 2 x
i2 J 3 0
Sx 2
S
K
S
10.6.9. Уравнения квадрик мы получим, приравнивая нулю эти многочлены. При этом учтем, что для
многочлена во второй строке таблицы мы можем выбрать направление оси Ox так, как нам удобнее.
уравнение
пояснение
0
y2 2x 3
S
K
x2 2 0
S
i2 0
1 x 2 2 y 2
i2 0, J 3 0
i2 J 3 0
1 , 2 – корни уравнения z 2 i1 z i2 0 .
10.6.10. Для различных комбинаций знаков коэффициентов мы получим все 9 канонических уравнений
квадрик на евклидовой плоскости.
10.6.11.
5
A3
2
Пример.
Квадрика
5x 2 4 xy 8 y 2 32 x 56 y 80 0 .
Матрицы: A 2
5 2
2 8
,
16
28 . Инварианты: S 13 , 36 , K 36 , 1296 . Уравнение для нахождения
16 28 80
2
8
1 , 2 :
2 13 36 0 . 1 4 , 2 9 .
Уравнение квадрики: 4 x 9 y
2
2
1296
x2 y 2
0 . Каноническое уравнение: 2 2 1 .
39
3
2
§ 10.7. Канонический репер квадрики на евклидовой плоскости
10.7.1. Задача. На
E2 дана квадрика Q : aij xi x j ai xi a, aij a ji i, j 1,..., 2 , имеющая хотя
бы один центр. Построить для неё канонический репер.
a11 x a12 y a1 0
. Пусть C x0 , y0 – какой-либо центр. Точка C
a21 x a22 y a2 0
– вершина канонического репера квадрики. При переносе вершины репера в точку C уравнение квадрики приi j
нимает вид aij x x b . Пусть 1 , 2 – собственные числа матрицы aij , а e1 , e2 – соответствующие едиРешение. Уравнения центров:
ничные собственные векторы. Переход к новому базису сопровождается переходом к координатам
x̂ , ŷ . Урав-
нение квадрики теперь запишется в виде 1 xˆ 2 yˆ b . Если
b 0 , то меняем (при необходимости) номера
у коэффициентов i (и, соответственно, у векторов e i ) с тем, чтобы оказалось 1 2 . Если b 0 , то меняем
(при необходимости) номера у коэффициентов i (и, соответственно, у векторов e i ) с тем, чтобы оказалось
1b 2b .
2
2
10.7.2. Пример.
10.7.3. Задача. На
E2 задана парабола Q : bx cy a1 x a2 y a 0 . Построить для неё канони2
ческий репер.
34
b 0 . Ось сим c
b
метрии параболы (ось X ) параллельна вектору
. Соответственно, ось Y параллельна вектору . Для
b
c
Решение. Меняя (при необходимости) обозначения переменных, можем считать, что
fx
. Находим точку C x0 , y0 , в
fy
функции f bx cy a1 x a2 y a находим вектор-градиент v
2
которой градиент параллелен оси X . Точка
направлению градиента в точке C .
10.7.4. Пример.
C – вершина репера. Направление оси X противоположно
ЛИТЕРАТУРА
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
Александров П.С. Курс аналитической геометрии и линейной алгебры. М.: Наука, 1979.
Бахвалов С.В., Моденов П.С., Пархоменко А.С. Сборник задач по аналитической геометрии. М.: Наука,
1964.
Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры. М.: Наука, 1985.
Беклемишева Л.А., Петрович А.Ю., Чубаров И.А. Сборник задач по аналитической геометрии и линейной
алгебре. М.: Наука, 1987.
Бухтяк М.С. Основы линейной алгебры. Томск: ТГУ, 2002.
Делоне Б.Н., Райков Д.А. Аналитическая геометрия. М.-Л.: ГИТТЛ. 1949.
Ефимов Н.В. Краткий курс аналитической геометрии. М: Наука. 1969.
Ефимов Н.В., Розендорн Э.Р. Линейная алгебра и многомерная геометрия. М.: Наука,. 1979.
Ильин В.А., Поздняк Э.Г. Аналитическая геометрия. М.: Наука, 1981.
Клетеник Д.В. Сборник задач по аналитической геометрии. СПб: Специальная Литература, 1998.
Кострикин А.И., Манин Ю.И. Линейная алгебра и геометрия.
Кочин Н.Е. Векторное исчисление и начала тензорного исчисления. М.: Наука. 1965.
Мизин А.Г. Краткий курс линейной алгебры и аналитической геометрии. Томск: Изд-во ТГУ. 2006.
Моденов П.С., Пархоменко А.С. Сборник задач по аналитической геометрии. М.: Наука, 1976.
Постников М.М. Аналитическая геометрия.
Постников М.М. Лекции по геометрии.
Привалов И.И. Аналитическая геометрия.
Тышкевич Р.И., Феденко А.С. Линейная алгебра и аналитическая геометрия. Минск: Высшая школа, 1976.
Федорчук В.В. Курс аналитической геометрии и линейной алгебры. М.: МГУ, 1990.
Фиников С.П. Аналитическая геометрия. М.: Учпедгиз, 1952.
Цубербиллер О.Н. Задачи и упражнения по аналитической геометрии. М.: Наука, 1970.
Шурыгин В.В. Аналитическая геометрия.
Щербаков Р.Н., Малаховский В.С. Краткий курс аналитической геометрии. Томск: ТГУ, 1964.
35