Принципы цифровой обработки дискретных сигналов
реклама

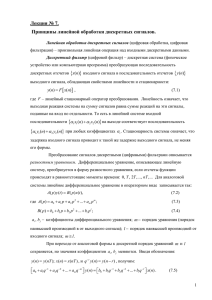
Лекция № 7 Принципы цифровой обработки дискретных сигналов •Линейная обработка дискретных сигналов (цифровая обработка, цифровая фильтрация) – произвольная линейная операция над входными дискретными данными. •Дискретный фильтр (цифровой фильтр) – дискретная система (физическое устройство или компьютерная программа) преобразующая последовательность дискретных отсчетов x(n) входного сигнала в последовательность отсчетов y (n) выходного сигнала, обладающая свойствами линейности и стационарности: y(n) F x(n) где F – линейный стационарный оператор преобразования. Принципы цифровой обработки дискретных сигналов • Линейность означает, что выходная реакция системы на сумму сигналов равна сумме реакций на эти сигналы, поданные на вход по отдельности. То есть в линейной системе входной последовательности 1 x1 (n) 2 x2 (n) на выходе соответствует последовательность 1 y1 (n) 2 y2 (n) при любых коэффициентах i . • Стационарность системы означает, что задержка входного сигнала приводит к такой же задержке выходного сигнала, не меняя его формы. Принципы цифровой обработки дискретных сигналов • Преобразование сигналов дискретными (цифровыми) фильтрами описывается разностным уравнением. Дифференциальное уравнение, описывающее линейную систему, преобразуется в форму разностного уравнения, если отсчеты функции происходят в равноотстоящие моменты времени: 0, T , 2T ,..., nT ,... Для аналоговой системы линейное дифференциальное уравнение в операторном виде записывается так: A( p ) y (t ) B( p ) x(t ), A( p ) a0 a1 p a2 p 2 ... am p m ; B( p) b0 b1 p b2 p 2 ... bl p l ; ai , b j коэффициенты дифференциального уравнения. Принципы цифровой обработки дискретных сигналов • Введя обозначения: y (n) y (nT ); x(n) x(nT ) и q r y ( n) y ( n r ) , получим: a0 a1q 1 a2 q 2 ... am q m y (n) b0 b1q 1 b2 q 2 ... bl q l x (n) • Разностное уравнение в общем виде записывается следующим образом: m l a y(n i) b x(n j ), i 0 i j 0 j m l i 1 j 0 y(n) ai y(n i) b j x(n j ). или Принципы цифровой обработки дискретных сигналов • Таким образом, дискретный фильтр представляет собой линейную комбинацию равноотстоящих отсчетов x ( n j ) некоторой функции x(t ), а также вычисленных значений на выходе фильтра y (n i ). • Если все коэффициенты ai 0 , фильтр называют нерекурсивным (трансверсальным). Он работает по алгоритму: y(n) b0 x(n) b1 x(n 1) b2 x(n 2) ... bl x(n l ). • Если хотя бы один из коэффициентов ai 0 , то фильтр называют рекурсивным (фильтром с обратной связью). В нем для формирования n го значения выходного сигнала используют предыдущие значения как входного, так и выходного сигналов. Основные структурные элементы дискретных (цифровых) фильтров В дискретных фильтрах используют три операции: • задержку на интервал отсчета, • сложение, • умножение. Соответственно основными элементами дискретных фильтров как физических устройств являются: • элемент единичной задержки (на интервал дискретизации сигнала); • сумматор; • умножитель. Типовые дискретные сигналы 1. Цифровой единичный импульс, или единичный отсчет: 1, n k u0 (n k ) 0, n k u0 (n k ) 1,0 n 0 k Типовые дискретные сигналы 2. Цифровой единичный скачок, или ступенчатая функция: 1, n 0 u1 (n) 0, n 0 u1 (n) 1,0 0 n Типовые дискретные сигналы 3. Экспоненциальная дискретная функция (убывающая экспонента): a n , n 0 e(n) 0, n 0 e( n ) 1,0 a 1 0 n Типовые дискретные сигналы 4. Косинусоидная дискретная функция: n C (n) cos(2 ) n0 C ( n) 1, 0 0 n 1, 0 На рисунке: C (n) cos 0 n, 0 2 8. Разновидности последовательностей дискретных отсчетов • Последовательность y (n) x(n k )называется сдвинутой и получается из последовательности x(n) при ее сдвиге по оси n вправо, если k 0 , и влево, если k 0. • Периодической является последовательность x(n), удовлетворяющая условию x(n) x(n mN ) , где m, N целые числа, m 1, 2,... . Число N называется периодом последовательности. Периодическую последовательность достаточно задать на интервале одного периода, например при 0 n N 1. • Сверткой двух периодических с периодом N последовательностей x1 (n) и x2 (n) называется N 1 N 1 последовательность y (n) x1 (m) x2 (n m) x1 (n m) x2 (n) m0 m0