Системный подход и моделирование в экологии
реклама

Системный подход и
моделирование в экологии
Экологические ограничения
Ход среднегодовых температур XIX-XXI вв.
в Якутии и на земном шаре
Тренды среднемесячных температур с
1972 по 2005 гг. в Тикси, Жиганске,
Якутске и Олекминске
Лесные пожары в Якутии:
количество возгораний и площадей,
пройденных огнём, 1960-2004
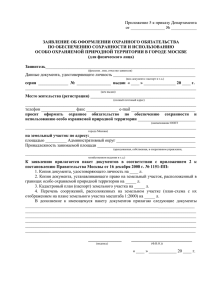
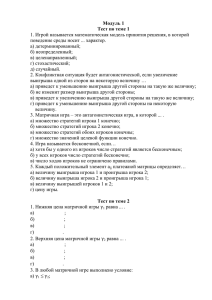
Функциональная структура
иерархической системы принятия
решений
M1
M0
M2
M3
Выход системы
на управляющие
Взаимодействие ПСС региона со
смежными территориями
структуры
1. МОНИТОРИНГ
0. СИСТЕМНЫЙ
2. СОСТОЯНИЕ
3. ВОЗДЕЙСТВИЕ
4. ПРОГНОЗ
3. ЗНАНИЯ
5. РЕГУЛИРОВАНИЕ
ПСС – природно-социальная система
Схема региона
предприятие
река
точка замера
населенный пункт
Система ( N ,{ X i }iN ,{H i }iN ) ,
в которой N={1,2, … n} - множество
игроков, Xi - множество стратегий
игрока i, Hi
– функция выигрыша
игрока, определенная на декартовом
произведении
множеств
стратегий
игроков
(множество ситуаций игры),
называется
неантагонистической
бескоалиционной
игрой
в
нормальной форме.
*
*
*
*
*
x
(
x
,
x
,...,
x
,...
x
Ситуация
1
2
i
n)
называется ситуацией равновесия по
Нэшу, если для всех xi X i и i 1,2,..., n
имеет место неравенство
H i ( x , x ,..., x ,...x ) H i ( x , x ,..., xi ,...x )
*
1
*
2
*
i
*
n
*
1
*
2
*
n
Иерархическая неантагонистическая
лица в нормальной форме
где I=1..n,
игра (n+1)-го
– множество стратегий игрока
,
– множество стратегий игрока
,
– функция
выигрыша игрока ,
– функция выигрыша игрока
n
K 0 (X, Y) g i A i R iα L1iα H i (x i , yi ) Qi (x i , yi )
i1
i
i
K i (x i , yi ) A i R iα i L1i α i Ci (x i ) - H i (x i , y i )
n
если
q i (t j )(1 - x i ) β ;
i 1
n
K 0 (X, Y, ) g i A i R iα L1iα H i (x i , y i ) h i (λ i , x i ) Qi (x i , y i , i )
i
i
i1
K i (x i , yi , λ i ) A i R iα i L1i α i Ci (x i ) - H i (x i , yi ) h i (x i , λ i )
если
n
q i (t j )(1 - x i )
i 1
.
n
n
0
K 0 ( X , Y , , ) gi Di yi (1 xi ) i qi (1 xi ) i (1 x j )aij
i 1
j 1
n
0
pi yi (1 xi ) ki i (1 x j )aij ri i qi (1 xi ) ,
j 1
0
K i ( xi , yi , i , i ) Di Ci ( xi ) yi (1 xi ) i qi (1 xi )
n
i q j (1 x j )aij , qi0 (1 xi ) mi .
j 1
Функция выигрыша предприятия,
вошедшего в коалицию:
K i ( xi , yi , i , i ) Di Ci ( xi ) yi (1 xi ) i qi0 (1 xi )
n
i q j (1 x j )aij i q 0j (1 x j )bij , qi0 (1 xi ) mi .
j 1
jS
Функция выигрыша коалиции SI :
V(S) K i ( x i , y i , i , i ) D i C i ( x i ) y i (1 x i )
iS
iS
iS
iS
n
i q j (1 x j )a ij i
iS
j1
iS
jS
q 0j (1
x j )b ij , q i0 (1 x i ) m i .
Теорема. Для того, чтобы функция
выигрыша
коалиции
была
супераддитивной,
необходимо
и
достаточно,
чтобы
для
любых
непересекающихся множеств S,T I,
выполнялось неравенство:
где
iS (T ) i
Ti ( S ) i
Si(T) iT(S) 0,
iS
iT
F ( x
) ,
S
S T
q
(
1
x
)
a
F
(
x
)
F
(
x
) , i S,
j
j
ij
i
i
i
i
jN \T
q j (1 x j )aij
jN \ S
i
T
i
) Fi ( xiS T
i T.
0.466 0,466 2
Vi
0.466 0,466 2
~
0.387 (~y q i i 0,761) ~
~
, y q i i 0.761,
0.387
~
0.387 (~y q i i 0,761)
~
~
,0.2 y q i i 0.761.
0.387
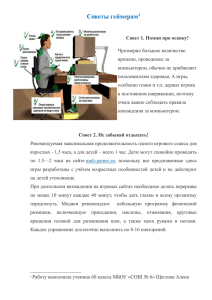
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Исследованы фазовые портреты системы (1) в I
четверти при различных значениях параметров.
Основные виды особых точек – седло и
устойчивый узел.
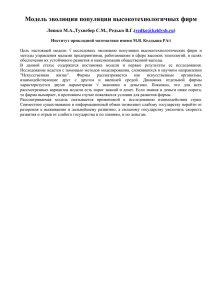
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Бифуркационный параметр
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Функция выигрыша Центра
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Выигрыш игрока второго уровня
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
Оптимальное решение игры при b>m
Устойчивость модели динамики охраняемой
популяции при оптимизации функции добычи
sd 2
l1 (1 s ) l 2 s l3b 1 s ( x(t ) y (t )) 1 s (hx(t ) ), hx(t ) ,
K1
l (1 s ) l s l b sd 2 ( x(t ) y (t )), hx(t ) ,
2
3
1
1 s
(hx(t ) ), hx(t ) ,
hx(t )( p qhx(t )) l1 (1 s )
K2
1 s
hx(t )( p qhx(t )) l1 (1 s ), hx(t ) .
p - рыночная стоимость добычи, q - затраты на добычу.
:
,
Оптимальное решение игры при
s*
hx(t )
1
2(l1 l 2 ) d 2 ( x(t ) y (t )) (2(l1 l 2 ) d 2 ( x(t ) y (t ))) 2 4 (hx(t ) m)(l1 l 2 )
l1 l 2
h * x(t )
p(1 s)
.
2q(1 s)
(1 s)( z l3 w Q)
1
1 m (1 s)( z l3 v Q)
F
.
f1 ( z )
F
l3 w v
x(t )
x(t )
0.004
.
0.003
0.002
0.001
50
100
150
z L qA 2 A z L
f 2 ( z)
exp
, z L 0.
ch 2
2
2qC
2 2q( z L)
C q
1
0.10
0.08
0.06
0.04
0.02
5
10
15
20