Тема 3 Кинематика поступательного движения»
реклама

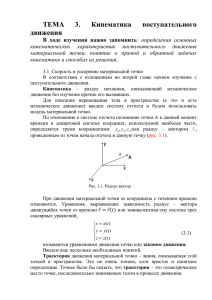
Тема 3 «Кинематика поступательного движения» В соответствии с изложенным во второй лекции начнем изучение с поступательного движения. Кинематика – раздел механики, описывающий механическое движение без изучения причин его вызвавших. Для описания перемещения тела в пространстве (а это и есть механическое движение) введем систему отсчета и будем использовать модель матеиальной точки. По отношению к системе отсчета положение точки А в данный момент времени в декартовой системе координат, используемой наиболее часто, определяется тремя координатами: xA , y A , z A или радиус – вектором r , проведенным из точки начала отсчета в данную точку (см. рисунок 1). Рис. 1 При движении материальной точки ее координаты с течением времени изменяются. Уравнение выражающие зависимость радиус – вектора движущийся точки от времени r r (t ) или эквивалентная ему система трех скалярных уравнений x x(t ) y y (t ) z z (t ) называются уравнениями движения точки или законом движения. Введем еще несколько необходимых понятий. Траектория движения материальной точки – линия, описываемая этой точкой в пространстве. Это не очень точное, хотя простое и понятное определение. Точнее было бы сказать, что траектория – это геометрическое место точек, последовательно занимаемых телом в процессе движения. В зависимости от формы траектории движения подразделяются на прямолинейные и криволинейные. Если все точки траектории лежат в одной плоскости, движение называется плоским. Траектории механического движения в различных системах отсчета могут иметь неодинаковую форму. Исследуя пространственно – временное перемещение тел, кинематика оперирует следующими физическими величинами – время, длина пути, перемещение, скорость движения и ускорение. Рассмотрим движение материальной точки по произвольной траектории. Отсчет времени начнем с момента, когда точка находилась в положении А (см. рисунок 2). Длиной пути называется длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени. Длина пути является скалярной функцией времени S S (t ). Рис. 2 Перемещением называется вектор r r r0 . Средней скоростью v движения за интервал времени t t t0 называется физическая величина r r0 r v t t0 t Направление вектора средней скорости совпадает с направлением вектора перемещения r (см. рисуно 3). Рис. 3 Средняя скорость характеризует движение в течение всего интервала времени, для которого она определена. Это простое определение, но Мгновенной скоростью в момент времени называется физическая величина, равная пределу, к которому стремится средняя скорость при бесконечном уменьшение интервала времени t r v lim v lim t 0 t 0 t В математике такой предел называется производной, поэтому dr v dt Вектор мгновенной скорости v направлен по касательной к траектории в сторону движения материальной точки. Средним ускорением неравномерного движения за интервал времени t t t0 называется физическая величина v v0 v a t t0 t Мгновенным ускорением материальной точки в момент времени t называется физическая величина, равная пределу, к которому стремится среднее ускорение при бесконечном уменьшении интервала времени t v dv a lim a lim t 0 t 0 t dt Направление среднего ускорения совпадает с направлением вектора v (см. рисунок 4). Рис. 4 С мгновенным ускорением дело обстоит сложнее, поэтому рассмотрим это подробно. Как всякий вектор, вектор ускорения при произвольном плоском движении (например, вращательном) материальной точки можно представить в виде суммы его составляющих по двум взаимно перпендикулярным направлениям. В качестве одного направления выберем направление касательной в рассматриваемой точке траектории, тогда другим перпендикулярным направлением окажется направление нормали к кривой в этой же точке. Составляющая ускорения, направленная по касательной к траектории, называется тангенциальной составляющей ускорения ( a ) и определяет быстроту изменения скорости движения по численному значению. Вектор направлен в сторону движения точки при возрастании ее скорости и в противоположенную сторону – при убывании скорости. Тангенциальная составляющая ускорения численно равна производной скорости по времени и характеризует быстроту изменения скорости по численному значению. a dv dt Вторая составляющая называется нормальной составляющей ускорения ( an ) и направлена по нормали к касательной и к центру вписанной в данной точке окружности (поэтому ее называют также – центростремительным ускорением). Нормальная составляющая ускорения характеризует быстроту изменения скорости движения по направлению и численно равна v2 an R где R – радиус криволинейной траектории в данной точке (радиус вписанной окружност и). Способ определения радиуса кривизны произвольной кривой излагается в специальной математической дисциплине, которая называется дифференциальная геометрия. Таким образом, мгновенное ускорение представляется в следующем виде dv a a an dt (см. рисунок 5). Рис. 5 При этом величина ускорения равна a a2 an2 Рассмотренная процедура определения скорости и ускорения по заданному закону движения называется прямой задачей кинематики. Данное определение можно представить в виде диаграммы Прямая задача кинематики r (t ) v (t ) a (t ) Указанная задача решается с помощью операции дифференцирования. Задачу определения скорости и закона движения по заданному ускорению естественно называть обратной задачей кинематики. Обратная задача кинематики a (t ) v (t ) r (t ) Естественно, что эта задача решается с помощью операции интегрирования v (t ) v0 a (t )dt v (t ) v0 at r (t ) r0 v (t )dt at 2 r (t ) r0 v0t 2 Первая и третья формулы соответствуют решению в общем случае, а вторая и четвертая для постоянного ускорения. Следует отметить, что указанное решение обратной задачи справедливо только в том случае когда ускорение является функцией только времени. Однако, в большинстве интересных для приложений задач ускорение является функцией координат или скорости. Окончательное решение обратной задачи, поэтому, возможно только в рамках динамики, о чем будет рассказано в соответствующем месте. Рассмотренные в данной лекции определения позволяют ввести новое понятие – понятие состояния. Под состоянием обычно понимают минимальный набор величин, который дает возможность предсказывать дальнейшее поведение системы. Для классической механики таким набором будут радиус-вектор и скорость (или радиус вектор и импульс), а для квантовой механики – волновая функция (r ) .