Аппроксимация градуировочных характеристик измерительных
реклама

Аппроксимация градуировочных характеристик
измерительных каналов в условиях малой
чувствительности к измеряемым параметрам
В.В. Тулупова, Институт проблем управления сложными системами РАН
(Самара)
Международная конференция «Современные проблемы прикладной математики и механики: теория,
эксперимент и практика», посвященная 90-летию со дня рождения академика Н.Н. Яненко
Новосибирск, 2011
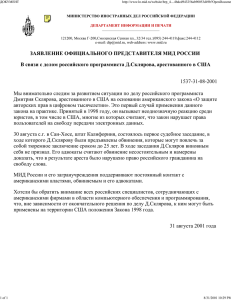
Специфика задачи измерения координат смещений торцов лопаток
газотурбинного двигателя
Конструкция кластерного датчика (КОВТД)
Кластерный метод измерения
I1 I 2 I 3 I 4
i i i i
с1 = ∑ ∑ ∑ ∑ a1,i1i2i3i4 x 1 y 2 z 3 Θ 4 ,
i1 =0i2 =0 i3 =0 i4 =0
I1 I 2 I 3 I 4
i i i i
с2 = ∑ ∑ ∑ ∑ a2,i1i2i3i4 x 1 y 2 z 3 Θ 4 ,
i1 =0i2 =0 i3 =0 i4 =0
I1 I 2 I 3 I 4
с3 = ∑ ∑ ∑ ∑ a3,i i i i xi1 y i2 z i3 Θ i4 .
1234
i1 =0i2 =0 i3 =0 i4 =0
Ориентация чувствительных элементов относительно торца лопатки (в проекции).
Z
Имитатор
Z
ϕЧЭ0=ϕЧЭ1
ϕ0
ϕЧЭ1
ЧЭ2
ЧЭ1
X
d1
ЧЭ1
ЧЭ2
ЧЭ3
X
Имитатор
2
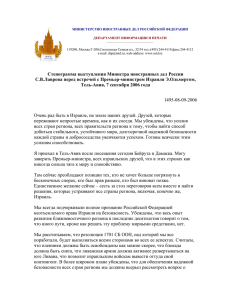
Пример градуировочной характеристики (ГХ) кластерного датчика с
двумя чувствительными элементами
С2
С1
8000
8000
6000
IV
III
6000
4000
II
2000
I
4000
2000
-4
4
x, мм
2
08
y, мм
0
6
x, мм
-2
-2
4
2
8
0
6
y, мм
4
2
2
-4
4
7000
С1
6000
Y =0.5 мм
5000
Y =1 мм
4000
3000
Y =2 мм
2000
Y =3 мм
1000
Y =8 мм
0
-4
-3
-2
-1
0
1
2
3
X , мм
4
3
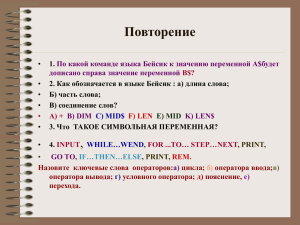
Оценка трансформированной погрешности результатов,
обусловленной погрешностью аппроксимации ГХ и погрешностями
измерительных каналов
δx, %
δy, %
0.4
2.25
0.3
1.5
0.2
0.75
0.1
08
4
2
6
y, мм
0
4
-2
2
-4
x, мм
08
y, мм
4
2
6
0
4
-2
2
x, мм
-4
Цели и задачи новой формализации с использованием интервального анализа:
- совершенствование алгоритмов вычислений координат;
- аттестация алгоритмов и их метрологическое автосопровождение;
- поддержка процессов проектирования.
4
Аппроксимация временных рядов с использованием
интервал-полиномов
Интервальный образ полинома (интервал-полином) – полином степени N,
нулевой коэффициент которого задан интервалом, е все другие точными
значениями /Подружко А.А., Подружко А.С. Интервальное представление
полиномиальных регрессий. – М.: Едиториал УРСС, 2003. – 48 с / :
N
P (t ) = a 0 + ∑ ait
i =1
N
Свойства интервал-полинома: d P (t ) = d a0 = const ,
mid P(t ) = mid a 0 + ∑ ait
i =1
Условие полноты охвата экспериментальных точек
N
− ε ≤ y (t ) − ∑ ait + mid a0 ≤ ε ,
t = 1,2,...T
i =1
− ∞ < mid a 0 < +∞ , − ∞ < ai < +∞ , i = 1,2,...N
ε ≥0
min (mid a0 ,ε ,a1 ,a2 ,...,a N ) ε
Подход к решению – ЗЛП с простой целевой функцией и 2T ограничениями
5
Аппроксимация градуировочных характеристик с использованием
интервал-полиномов
(на примере измерения двух координат без учета температуры среды)
N M
с( x, y ) = a00 + ∑ ∑ aij xi y j - интервал-полином от двух переменных
i =1 j =1
Исходные наборы экспериментальных точек -
{xk , k = 1,2,...K }, {yl , l = 1,2,...L},
{ckl , k = 1,2,...K , l = 1,2,...L}
Задача ЛП для определения коэффициентов
N M
i j
− ε ≤ ckl − ∑ ∑ aij xk yl + mid a 00 ≤ ε ,
k = 1,2,...K , l = 1,2,...L
i =1 j =1
− ∞ < mid a 0 < +∞ , − ∞ < ai < +∞ , i = 1,2,...N
ε ≥0
min (mid a00 ,ε ,a01,a02 ,...,a NM ) ε
Решение ЗЛП с простой целевой функцией и 2KL (≈100) ограничениями
6
Определение координат смещений торцов лопаток в новой формализации
I1 I 2 I 3 I 4
i i i i
с1 = ∑ ∑ ∑ ∑ a1,i1i2i3i4 x 1 y 2 z 3 Θ 4 + a10000 ,
i1 =1i2 =1i3 =1i4 =1
I1 I 2 I 3 I 4
i i i i
с 2 = ∑ ∑ ∑ ∑ a2,i1i2i3i4 x 1 y 2 z 3 Θ 4 + a 20000 ,
i1 =1i2 =1i3 =1i4 =1
I1 I 2 I 3 I 4
с 3 = ∑ ∑ ∑ ∑ a3,i i i i xi1 y i2 z i3 Θ i4 + a30000 .
1234
i1 =1i2 =1i3 =1i4 =1
Достоинства:
- линейная постановка задачи с интервальными переменными;
- хороший «физический подтекст» - аддитивный сдвиг ГХ (погрешности начального
положения, старение датчиков, температурный сдвиг);
- возможность простейших операций коррекции погрешностей.
Недостатки:
- необходимость алгоритмов конструирования интервалов для измеренных кодов
(задание границ точности вычисления координат);
- отсутствие механизма коррекции мультипликативного сдвига ГХ (изменение
чувствительности датчика из-за влияния мешающих факторов)
7