Численное моделирование механических систем с
реклама

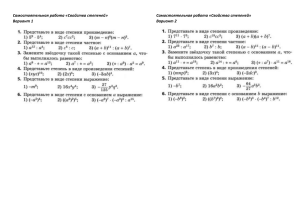
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ МЕХАНИЧЕСКИХ СИСТЕМ С ОДНОСТОРОННИМИ ОГРАНИЧЕНИЯМИ ПОСТУПАТЕЛЬНЫХ И ВРАЩАТЕЛЬНЫХ СТЕПЕНЕЙ СВОБОДЫ М. И. Раковская Петрозаводский государственный университет Объектом исследования в данной работе является система упругих тел с односторонними ограничениями поступательных и вращательных степеней свободы. По одной из классификаций такие системы относятся к классу конструктивно нелинейных систем. Отличительный классификационный признак таких механических систем заключается в том, что имеет место кусочно-линейная зависимость параметров состояния системы от параметра воздействия. Основная проблема расчета состоит в том, чтобы выяснить действительное состояние каждой односторонней связи (включено или выключено). Сложность проблемы объясняется экспоненциальным ростом числа возможных состояний механической системы при увеличении числа односторонних связей. Для m таких связей возможны 2m вариантов состояния, из которых осуществляется только один. В данной работе представлен подход, позволяющий избежать полного перебора вариантов и получить решение задачи, не выходя за рамки обычного линейного расчета. В известных публикациях обычно рассматриваются конструкции с односторонними ограничениями поступательных степеней свободы. Однако в случае односторонних ограничений вращательных степеней появляются затруднения, которые не преодолены в полной мере до настоящего времени [1]. В развитие ранее выполненных работ [2] предлагается подход, одинаково эффективный при моделировании механических систем с односторонними ограничениями поступательных и вращательных степеней свободы. Как известно, в случае линейной зависимости параметров состояния от параметров воздействия расчет сводится к решению системы линейных алгебраических уравнений. Система уравнений метода конечных элементов имеет вид KU = P , где K – матрица жесткости конструкции, P – вектор, описывающий внешнее воздействие, U – вектор узловых перемещений конечных элементов. Для конструкции с односторонними ограничениями перемещений можно стандартным образом составить разрешающую систему уравнений метода конечных элементов, считая, что все односторонние связи включены. При этом систему уравнений в контексте ее дальнейшего применения удобно представить в виде (1) R = KU P , где R – вектор узловых реакций конечных элементов. С физической точки зрения перемещения узлов могут быть разделены на три типа. 1. Перемещения U i = 0 (i = 1,…t), ликвидированные двусторонними связями. Реакции, сопряженные с ними, подлежат определению. 2. Перемещения U i i = (t +1,...,t + f) , возникающие как результат деформирования элементов механической системы, и на которые не наложены связи. Эти перемещения могут быть положительными, отрицательными или равными нулю. Однако совместные с ними реакции равны нулю: Ri = 0 . Это реакции наложенных связей метода перемещений. Ui 0 3. Перемещения ( i = t + f +1,...,t + f + s ), на которые наложены односторонние ограничения. По принятому правилу знаков они могут быть только неотрицательными. Реакции Ri 0 , совместные с этими перемещениями, также удовлетворяют условиям неотрицательности. Кроме того, на сопряженные реакцию и перемещение этого типа накладывается условие дополнительности RU i i =0. Задача сводится к решению системы n = t + f + s уравнений с 2n неизвестными. Такая задача известна как задача дополнительности. Поскольку по меньшей мере половина неизвестных имеет нулевое значение, решение может быть получено путем последовательного их перевода в правую часть системы (1) с помощью жордановых исключений. Если при этом значения оставшихся в левой части неизвестных будут удовлетворять наложенным ограничениям, то решение найдено. Алгоритмы решения линейной задачи дополнительности, основанные на преобразованиях системы, различаются правилами, определяющими последовательность этих преобразований. Количество преобразований, за которое тем или иным методом будет получено решение, заранее неизвестно. Даже для задач небольшой размерности поиск решения может свестись к полному перебору всех возможных состояний односторонних связей или привести к зацикливанию [1]. Для решения задач указанного класса предлагается алгоритм, основанный на применении энергетического критерия. Условие, позволяющее прогнозировать очередность перехода односторонней связи i в действительное состояние, имеет вид [2] in m i P i2 / 2K ii , Pi < 0 (2) Проиллюстрируем предлагаемый алгоритм на примере балки с тремя односторонними связями (рис. 1а). Балка загружена сосредоточенным моментом. Требуется определить действительное состояние односторонних связей, реакции связей, перемещения характерных точек. Пусть l = 2, EI = 44.5, M = 1. Решение задачи, намеренно очевидное, упрощает анализ работы предлагаемого алгоритма. Формируем систему уравнений метода конечных элементов, считая что все односторонние связи включены. Балку разбиваем на два конечных элемента одинаковой длины. Реакции и перемещения, совместные с односторонними связями, положительны (рис. 1б). R1 66.75 R 66.75 2 R3 66.75 R4 66.75 R5 0 R6 0 U1 0 , U 0 89 66.75 44.5 0 0 2 66.75 133.5 0 66.75 66.75 U 3 0 44.5 0 178 66.75 44.5 U 4 0 0 66.75 66.75 66.75 66.75 U 5 0 0 66.75 44.5 66.75 89 U 6 1 Ri 0, U i 0, i = 3, 5, 6, U j R j = 0, j = 1, .., 6 66.75 66.75 66.75 0 0 (3) По условию задачи U1 = U 2 = R4 =0. Представим (3) в табличной форме, сгруппировав неизвестные таким образом, чтобы были выделены в отдельные блоки параметры связей, относящихся к одному типу. Так как R4 =0, то выполняем один шаг жордановых исключений с диагональным элементом K 44 : U1 =0 U 2 =0 R4 =0 U 3 =0 U5 =0 U 6 =0 R1 41,719 50,063 0,375 66,75 25,031 -16,688 P 0 R2 50,063 77,875 0,25 66,75 16,688 -11,125 0 U4 -0,375 -0,25 0,00562 0 0,375 -0,25 0 R3 66,75 66,75 0 135,5 66,75 -66,75 0 R5 25,031 16,688 -0,375 66,75 41,719 -50,063 0 R6 -16,688 -11,125 -66,75 -50,063 77,875 -1 0,25 Следующий шаг преобразований очевиден – выполняем жорданово исключение с диагональным элементом K 66 : U1 =0 U 2 =0 R4 =0 U 3 =0 U5 =0 R6 =0 R1 38,143 47,679 0,429 52,446 14,304 -0,214 P -0,214 R2 47,679 76,286 0,286 57,214 9,536 -0,143 -0,143 U4 -0,429 0,00642 -0,214 0,214 R3 52,446 57,214 0,214 76,286 23,839 -0,857 -0,857 R5 14,304 -0,214 23,839 -0,643 -0,643 -0,286 9,538 -0,00321 -0,00321 9,536 U6 0,214 0,143 -0,00321 0,857 0,643 0,0128 0,0128 По условию (2) разрешающим элементом на очередном шаге жордановых исключений является элемент K55 = 9,536 . Выполненный по аналогии с предыдущим очередной шаг жордановых исключений приводит к следующим значениям элементов вектора P: 0,75; 0,50; 0,011; 0,75; 0,067; 0,056. Тем самым получены искомые значения реакций и перемещений, отвечающие всем ограничениям задачи (рис. 1в). 1 M=1 a) б) EI=44.5 2 l=2 1 l=2 5 4 4 3 3 6 2 0.75 M=1 0.0562 0.5 в) 0.0674 0.0112 0.75 рис 1. Рис. 1 Отличительные особенности предлагаемого алгоритма определяются тем, что: 1. Критерий (2) индифферентен к размерности реакций односторонних связей, то есть удобен при моделировании систем упругих тел с односторонними ограничениями как поступательных, так и вращательных степеней свободы. 2. Алгоритм можно применять в случае, когда одностороннее ограничение находится в «пограничном» состоянии, то есть, когда обе переменных в соотношении u j rj = 0 равны нулю. В терминах задач дополнительности этот случай называется вырожденным и является препятствием для применения многих известных алгоритмов ее решения. 3. Если выключающаяся из работы связь не является «лишней» с кинематической точки зрения, алгоритм демонстрирует это отсутствием ограничения для соответствующего перемещения на очередном шаге жордановых исключений. Тогда следует переходить к рассмотрению движения тел. При численном моделировании движения эффективен вариант предложенного алгоритма [3]. Работа выполнена при поддержке Российского фонда фундаментальных исследований (проект 08-08-00979). ЛИТЕРАТУРА 1. Перельмутер А.В., Сливкер. В.И. Расчетные модели сооружений и возможность их анализа. – Киев: Изд-во "Сталь", 2002. – 600 с. 2. Колесников Г.Н., Раковская М.И. Энергетический критерий очередности перехода односторонних связей в действительное состояние // Строительная физика в XXI веке: Материалы научно-техн. конф. – М.:НИИСФ РААСН, 2006. – С. 606–608. 3. Раковская М.И. Об одном подходе к численному моделированию движения системы упругих тел с полукоэрцитивными контактами // Междунар. конф. «Шестые Окуневские чтения» 23-27 июня 2008 г., Санкт-Петербург: Материалы докладов. Т. 2 / Балт. гос. техн. ун-т. – СПб., 2008. – С. 45–49.