МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ ПРОТИВОТАНКОВОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С УЧЕТОМ УГЛА ПАДЕНИЯ
реклама

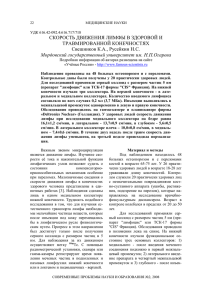
Чан Ван Хай Tran Van Hai Магистр MS Нгуен Нгок Диен Nguyen Ngoc Dien Кандидат технических наук PhD Нгуен Тхань Тунг Nguyen Thanh Tung Магистр MS Факультет Техники управления Вьетнамский государственный технический университет имени Ле Куй Дона Faculty of Control engineering Le Quy Don Technical University МОДЕЛИРОВАНИЕ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ ПРОТИВОТАНКОВОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С УЧЕТОМ УГЛА ПАДЕНИЯ MODELING THE OPTIMAL TRAJECTORY OF AN ANTI-TANK GUIDED MISSILE TAKING INTO ACCOUNT THE IMPACT ANGLE CONSTRAINT Аннотация на русском языке: В настоящей работе произведена попытка моделирования оптимальной траектории противотанковой управляемой ракеты (ПТУР) с учетом угла падения. В качестве критерия оптимальности выбирается интеграл (по расстоянию ракеты-цели) отношения квадрата ускорения ракеты на расстояние ракетыцели. В качестве оптимального сигнала управления выбирается ускорение ракеты. Предлагая, что скорость ракеты неизменна, с помощью теории оптимального управления позволяется определить функцию оптимального сигнала управления. Для проверки результатов расчета, автором выбрана конкретная модель ПТУР типа Javelin и сделано моделирование оптимальной траектории ПТУР. Результаты моделирования показаны, что цель уничтожена ПТУР-ом с совсем маленьким промахом в случае разных значений угла падения. The summary in English: In this paper, an attempt is made to simulate the optimal trajectory of an anti-tank guided missile (ATGM) taking into account the impact angle (IA). The cost function weighted by a power of range-to-go (by the integral according to relative distance between the missile and target). The selected control signal is the missile's LA, using an optimal control theory with the assumption that the missile’s velocity is unchanged and the angle between the missile velocity and line-of-sight (LOS) vector is small enough to linearize the engagement kinematics and allow the optimum control signal function to be found. To verify the calculation results, the author selected a specific Javelin type anti-tank missile and simulated the optimal trajectory of the anti-tank missile. The simulation results show that the target is destroyed by ATGM satisfying the zero miss distance and impact angle constraints (IAC). Ключевые слова: Угол падения, наведения ракеты, оптимальное наведение, метод пропорционального сближения, расстояние цели-ракеты. Международный научный журнал «Синергия наук» Keywords: impact angle, Anti-tank Guided Missile, Optimal Guidance Law (OGL), Proportional Guidance, Range-to-Go Introduction Requirements of increasing angle of approach to the target for ATGMs are playing a crucial role in the future warfare. For ATGM weapons, many guidance algorithms with IAC are mentioned in order to increase the probability of destroying target and attack tank’s weak areas. Many published papers in this field that using optimal control theory mainly have been solved the quadratic linear optimization problem for the missile's motion equations system. For the predecessor, Kim and Grider [1] was one of the earliest pioneers where an OGL has been presented for re-entry vehicles with an IAC to attack stationary targets. Many scholars modified traditional proportional navigation guidance (PNG) law to solve the IACs to satisfy constraints such as zero miss distance, terminal IA and zero terminal accelerations [2, 3, 4, 5, 6, 7]. Numerical simulations are carried out for missile models with constant speed or considering the change in the velocity of missile, but not examining the actual parameters that affect the velocity change such as thrust, mass of the ATGM engine and the gravitational force [8, 9]. Although the authors have proposed OGLs for solving IAC problems, they have not yet applied these proposed OGLs into a specific ATGM model. In this paper, the author has mentioned the application of an OGL to control the IA of a third generation fire-and-forget ATGM with variable speed to strike stationary tanks or armored devices on the ground. The guidance algorithm is designed based on the application of research results of author Bong Gyun Park [4] by solving the problem of minimizing the energy cost function weighted by a power of range-to-go with linear engagement models. The aim of solving this problem is to find out the expression of the missile lateral acceleration that can adjust the ATGM’s flight trajectory. Международный научный журнал «Синергия наук» Problem Formulation As illustrated in Figure 1, consider the trajection of an ATGM in the polar coordinate plane, it hits a stationary tank target on the ground. At a time t during flight, M (x, y) is the missile 2-D coordinates, V is the missile velocity. The r variable is the relative distance between the ATGM and the tank. s , θ, and λ represent the angle between the missile velocity and line-of-sight (LOS) vectors, the angle between the velocity (flight path) vector and the local horizon, and the LOS angle, respectively. The desired coordinates of the target impact point T ( x f , y f ), and the desired IAC is f . The ATGM trajection at launch is also characterized with the initial condition 0 0 . Where σ can be indicated as the missile’s heading angle in the assumption that the angle of attack ( ) of the ATGM is insignificant. The ATGM’s velocity depends on thrust, the gravitational force and atmospheric resistances. Figure 1. 2-D engagement geometry The nonlinear equations of motion in a polar coordinate system are given by . r = -Vcosσ (1) . . . a Vsinσ σ = θ- λ = M + V r (2) Международный научный журнал «Синергия наук» . H = Vsin (3) . a θ= M V (4) . -Rcos g sin 12m Cx V 2S V= m (5) ( H ) ; R R(t ) ; m m(t ) ; (6) Where, Cx , 𝜌, 𝑆, 𝑚, g denote the aerodynamic coefficients, the atmospheric density, the characteristic area of the missile, mass of the missile, and the gravitational acceleration, respectively. a M is the lateral acceleration (LA) perpendicular to the velocity vector. The subscript 0 denote the initial state and f is final state. The boundary conditions for the flight path of missile are given as r(t 0 ) = r0 ,σ(t 0 ) = σ0 ,θ(t 0 ) = θ0 (7) r(t f ) = rf ,σ(t f ) = σ f ,θ(t f ) = θ f (8) It assumes that the missile velocity V is constant and is small enough to linearize the missile-target engagement kinematics, by dividing Eqs. (2) and (3) for Eq. (1), we will get formulas for the linearized system which are given below: d 1 = - 2 aM r V dr (9) d 1 = 2 aM dr V (10) Optimal IA control guidance law In this section, target IA control guidance laws using linear optimal control theory are derived minimizing the energy cost function weighted by a power of range-to-go subject to the terminal conditions which are chosen as the interception with IAC. Международный научный журнал «Синергия наук» The cost function weighted a power of range-to-go can be written as shown below: J= 1 rf aM 2 2 тr0 (r - rf ) N dr, (11) Nі 0 Where N denotes a guidance gain. In case of N = 0, the problem becomes optimized for pure energy minimization. Also, in case of N > 0, the control energy are distributed by the weight function of (r - rf ) N in Eq. (11), so the guidance law will create the guidance commands very large at the initial phase and at the end of the guidance phase, the acceleration becomes zero. We are given a Hamiltonian function of the guidance problem is H= a a σ a - λ σ ( M2 + ) - λ θ M2 2(r - rf ) V r V 2 M N (12) Where λ σ , λ θ are called co-states. Their differential equations follow variable r are given by : dλ σ dr dλ γ dr =- =- H σ H θ = λσ 1 (13) r (14) =0 Where the terminal conditions of the co-states are f and f . Integrating Eqs. (13) and (14) with the terminal boundary conditions. λ σ = σ r ; λθ = θ rf (15) Necessary optimal conditions are derived of the problem ∂H/∂r=0, we have the following optimal LA: aM = σ 2 V rf r(r - r f ) N + θ V 2 (r - r f ) N Международный научный журнал «Синергия наук» (16) According to equation (16), the acceleration commands for N >0 will become zero at the end of the guidance phase. However, when N =0, the LA generated will change linearly and aM (rf ) 0 because of the constant . Substituting Eq. (16) into Eqs. (9) and (10) then integrating these equations, we have r r f = - 4 V rf r 4 2r r r r r r - r r r r r C (17) r r r - r r C (18) r rf =- 4 V rf 3 4 3 2 f f f 3 3 3 f 2 2 V 4r f 2 2 f f 3 2 r 2 f f 2 f f V4 2 where C and C are integration constants to be determined from the initial conditions. Set the shortened variables as follows : 3 2 r r 4 r rf r rf f 2 2 rf rf A(r) = 4 3 2 (20) 2 r r 3 r rf f rf B(r) = 3 2 (21) r r r r r C(r) = 3 f f 3 r r D(r)= 2 f (22) 2 2 f (23) 2 Therefore, applying the initial conditions of Eq. (7), Eqs. (17) and (18) can be rewritten as = r A(r0 ) A(r ) 4 B(r0 ) B(r ) 0 0 V rr V r 4 f Международный научный журнал «Синергия наук» (24) = C (r0 ) C (r ) 4 D(r0 ) D(r ) 0 V V r 4 (25) f Also, from the terminal conditions of Eq. (8), we have B(r ) r r D(r ) 0 0 0 0 0 f f f = V 4rf C (r0 ) B(r0 ) D(r0 ) A(r0 ) A(r ) r r C (r ) 0 0 0 0 0 f f f = -V C (r0 ) B(r0 ) D(r0 ) A(r0 ) 4 (26) (27) The closed-loop optimal solution is obtained as V2 6 r rf f ) 12(rf f r ) aM = (r - r f ) 2 (28) The conditions to intercept a stationary target at the final time t f are lim r 0 or t t f t t (29) t t (30) f rf 0 f 0 lim 0 or f t t f By applying the interception conditions of Eqs. (29) and (30) to Eq. (28), we have V2 aM = - 6 f 12 r (31) The optimal acceleration command in the formula (31) is shown in the research [4] by Bong Gyun Park. Replacing aM with the expression (31) found above into the nonlinear differential equations from (1) to (6). Solving differential equations analytically by using the ODE45 function in MATLAB software, with initial and terminal conditions for a type of ATGM. Numerical simulations and analysis of results are shown in section 4 below. Международный научный журнал «Синергия наук» Numerical Simulations and Result analysis In this section, the effectiveness of the guidance law is investigated through nonlinear numerical simulations with various terminal IACs and comparison control energy of different target IA scenarios. Consider five typical desired IAs include q f = -70°, -50°, - 40°, -30°, and 0°. The proposed guidance law is applied to the model of an ATGM and examined through the parameters are shown in Table 1 and Table 2. All simulation cases are terminated when the height of the missile's location becomes zero. Table 1. Initial Conditions for Nonlinear Simulations Parameters The initial position of the missile, ( x0 ; y0 ) Target Position, ( x f ; y f ) Values (0; 0) km (0.8 ; 0) km The initial velocity of the missile, V0 Launch Angle, s 0 = q0 Terminal IA, q f 250 m/s 30 deg -70 deg ~ 0 deg It is assumed that the flight motor is designed in a manner similar to the launch motor. The performance characteristics of the flight motors are known [10], (Table 2). Table 2. Actual Flight Motor Performance Time (s) 0 0.3 0.6 1.2 1.8 2.4 4.2 5.2 Thrust (N) 0 570 650 750 770 650 50 0 Mass (kg) 11.25 11.16 11.06 10.82 10.58 10.38 10.16 10.15 Международный научный журнал «Синергия наук» The intercept trajectories of an ATGM with different IA requirements are shown in Figure 2. Meanwhile, Figure 3 shows the time histories of guidance acceleration commands for the missile with various desired IAs. The flight trajectory for the case of q f = -70 deg tends to be more curved than the others, and thus, the corresponding magnitude of the acceleration command is much larger and control energy also requires a higher level as shown in Table 4. As shown in Figure 4, the look angles converge on zero near the final time. The IA errors and miss distances for this set of simulations are shown in Table 3, which validates that the zero miss distance and angle constraints are satisfied as well. As it shows, the proposed guidance law generates large LA at early part of the engagement. As the missiles approach to the target, the terminal guidance commands converge to zero. The acceleration commands have been generated form of polynomial of range-to-go, therefore, the commands should converge to zero as the missile approaches the target. In most cases, the missile with larger desired IA requires more LA. However, in five typical desired IAs are considered, the case of terminal IA is 30 degrees achieves optimum control energy and has the smallest command acceleration. Figure 2. Missile trajectory for various impact angles Figure 3. Lateral acceleration for impact angles Международный научный журнал «Синергия наук» Figure 4. Look angles for various impact angles Figure 5 - Flight Path angles for various impact angles It can be seen from Figure 5 that the desired IACs are satisfied for all cases. In any case, the proposed OGL through acceleration command adjustment to achieve the terminal AIs as required. Table 3. Miss distances and angle errors for different IA cases Desired IA (°) q f = 0 deg Miss distance (m) 0.1072 IA error (°) 0.0996 q f = -30 deg 0.0189 0.1 q f = -40 deg 0.0207 0.1 q f = -50 deg 0.0275 0.1 q f = -70 deg 0.0593 0.1002 Figure 6. Missile velocity for various impact angles Международный научный журнал «Синергия наук» Table 4. Comparison of Control Energy for various IAs f J tf J 1 2 aM dt , m 2 / s 3 2 t qf = deg 8622 0 qf = -30 q f = deg 6465.5 deg 10490 -40 q f = -50 q f =-70 deg 16294 deg 32505 The missile velocity depends on thrust, the gravitational force and air resistance in which thrust value and mass of missile are determined via Table 2 “Actual Flight Motor Performance”. Figure 6 illustrates the time histories of missile speed for various IAs. Conclusions In this paper, a proposed OGL with IAC has been applied for the antitank guided missile with time-varying velocity. The ATGM model took into account the factors such as thrust, weight, and velocity change over time. Furthermore, range-to-go weighted energy costs are compared with different IAs, allows the selection of an optimal target IA in the actual launch of anti-tank missiles. Numerical simulations are conducted to verify the performance of suggested guidance law which successfully meets the terminal constraints for ATGMs. For the further study, this area could be focus on expanding the proposed guidance law to deal with moving ground targets. Использованная литература/ References 1. M. Kim, K.V. Grider /Terminal guidance for impact attitude angle constrained flight trajectories IEEE Trans Aerospace Electron Syst, 1973. 2. B.S. Kim, J.G. Lee, H.S. Han /Biased PNG law for impact with angular constraint IEEE Trans Aerosp Electron Syst, 1998. Международный научный журнал «Синергия наук» 3. Jeong SK, Cho SJ, Kim EG /Angle constraint biased PNG. In: Proceedings of 5th Asian control conference; Melbourne, Australia. Piscataway (NJ): IEEE Press, 2004. 4. Bong Gyun Park. Optimal impact angle constrained guidance with the seeker’s lock-on condition J. KSIAM. Vol.19, No.3, 2015. 5. A. Ratnoo, D. Ghose /Impact angle constrained guidance against nonstationary nonmaneuvering targets. J Guid Control Dyn, 2010. 6. A. Ratnoo, D. Ghose /Impact angle constrained interception of stationary targets J Guid Control Dyn, 2008. 7. C.K. Ryoo, H. Cho, M.J. Tahk /Optimal guidance laws with terminal IAC J Guid Control Dyn, 2005. 8. Sang-Wook Shim, Seong-Min Hong, Gun-Hee Moon, and Min-Jea Tahk /Time-to-go Polynomial Guidance with IAC for Missiles of Time-Varying Velocity International Journal of Mechanical Engineering and Robotics Research, 2017. 9. Jun Zhou, Yang Wang, Bin Zhao /Impact-Time-Control Guidance Law for Missile with Time-Varying Velocity, Institute of Precision Guidance and Control, Northwestern Polytechnical University, Xi’an 710072, China, 2016. 10. Harris, J., Slegers, N. /Performance of a fire-and-forget anti-tank missile with a damaged wing. (Mechanical and Aerospace Engineering Department, University of Alabama), 298 p. Международный научный журнал «Синергия наук»