МАТЕМАТИКА
В ТЕХНИЧЕСКОМ УНИВЕРСИТЕТЕ
ь
ху
Пу = А (еьуьу) 4х — ехт
В.И. Ванько, О.В. Ермошина,
Г.Н. Кувыркин
ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
И
ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ
Издательство МГТУ
им. Н. Э. Баумана,
Математика в техническом
университете
Выпуск
Серия
Премии
ХУ
удостоена
Правительства
Российской Федерации
в области науки и техники
за 2003 год
...Мне казалось, что лучше пересказать удовлетворившие меня изложения различных вопросов
механики, чем в погоне за ложной оригинальностью ставить себя в странное положение не
повторять умных формулировок лишь на том
основании, что они были кем-то до тебя сказаны.
Н.Г.
Четаев.
Теоретическая механика
Комплекс
учебников
из 21 выпуска
Под редакцией В.С. Зарубина и А.П. Ктаиценко
Т. Введение
в анализ
П. Дифференциальное исчисление функций
одного переменного
Ш. Аналитическая геометрия
ГУ. Линейная алгебра
У. Дифференциальное исчисление функций
многих переменных
УТ. Интегральное исчисление функций
одного переменного
УП. Кратные и криволинейные интегралы.
Элементы теории поля
УШ. Дифференциальные уравнения
ТХ. Ряды
Х. Теория функций комплексного переменного
Х[. Интегральные преобразования
и операционное исчисление
ХП.
ХШ.
ХУ.
Дифференциальные
уравнения
математической физики
Приближенные методы математической физики
ХГУ. Методы оптимизации
Вариационное исчисление и оптимальное
управление
ХУ[. Теория вероятностей
ХУП. Математическая статистика
ХУШ. Случайные процессы
ХГХ. Дискретная математика
ХХ. Исследование операций
ХХ[.
Математическое
моделирование
в технике
В.И. Ванько, О.В. Ермошина,
Г.Н. Кувыркин
ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
и
ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ
Под редакцией
д-ра техн. наук, профессора В.С. Зарубина
и д-ра физ.-мат.
наук, профессора А.П.
Кришенко
Издание третье, исправленное
Рекомендовано
Министерством образования
Российской Федерации
в качестве учебника для студентов
высших технических учебных заведений
Издательство
Москва
МГТУ им. Н. Э. Баумана
2006
УДК 517.1(075.8)
ББК 22.151.5
В17
Рецензенть:
В1
проф. Бобылев Н.А., проф. Васин Р.А.
Ванько В.И., Ермошина О.В., Кувыркин Г.Н,
Вариационное исчисление и оптимальнос управление: Учеб.
для вузов / Под ред. В.С. Зарубина, А.П. Крищенко. - 3-е изд.,
исправл. — М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. —488 с.
(Сер. Математика в техническом университете; Вып. ХУ).
1ЗВМ 5-7038-2627-6 (Вып. ХУ)
1ЗВМ 5-7038-2484-2
Наряду с изложением основ классического вариационного исчисления
и элемептов теории оптимального управлепия рассмотрепы прямые методы вариациоппого исчислепия и методы преобразования вариациоппых
задач, приводящис, в частности, к двойственным вариационным принципам.
Учебник завершают примеры из физики, механики и техники, в
которых показана эффективность методов вариационного исчисления и
оптимального управления для решения прикладных задач.
Содержание
читают в МГГУ
учебника соответствует
им. Н.Э. Баумана.
курсу
лекций,
который
авторы
Для студептов и аспираптов техпических упиверситетов, а также
для инженеров и научных работников, специализирующихся в области
прикладной матгсмагики и математического моделирования.
Ил.52.
Библиогр.
77 назв.
УДК 517.1(075.8)
ББК 22.151.5
©
©
В.И. Ванько, О.В. Ермошина,
Г.Н. Кувыркин, 1999;
2006, с изменениями
Московский
государственный
технический университет
им. Н.Э. Баумана, 1999;
2006. с изменениями
Т5ВМ
5-7038-2627-6
153М
5-7038-2484-2
(Вып.
ХУ)
(©
Издательство
МГТУ
им. Н.Э. Баумана,
1999;
2006, с изменениями
ПРЕДИСЛОВИЕ
В истории развития сстественных наук четко прослеживается стремление свести количество исходных положений данной
науки к минимуму, и лучше всего к одному основополагающему принципу, который, как в зерне, заключал бы в себе все
содержание рассматриваемой области знаний.
Например, из
принципа
возможных
перемещений
Лагранжа
вытскают
урав-
нения равновесия системы материальных точек и абсолютно
твердых тел. Соединив принцип Лагранжа с принципом Даламбера,
получим более общий принцип механики,
следствиями
из которого являются уравнения движения.
Упомянутые принципы естественным образом обобщаются
на сплошные
среды — деформируемые
твердые тела, жидкости
и газы.
Одна из трудностей вычислительного характера, возникающих при реализации решения задачи, например, о нахождении
напряженно-деформированного состояния сплошной среды либо некоторой
искомых
того,
конструкции,
—
величин в уравнении
вывод
самих
уравнений
высокий
порядок
движения
движения
производных
(равновесия).
и
постановка
Кроме
красвых
условий зачастую являются самостоятельной проблемой.
В настоящее время достаточно распространена следующая
схема постановки задач о состоянии деформируемых тел. На
основе подходящего (в части ГУ мы обсуждаем этот вопрос)
вариационного
принципа
выписывают
функционал
(чаще
все-
го некоторое интегральное соотношение). С помощью правил
и приемов вариационного исчисления получают уравнения движения и естественные краевые условия. Последнее обстоятельство является замечательным фактом: „хороший“ вариационный принцип содержит всю информацию о природе изучаемого
явления.
Однако,
если
экстремальные свойства,
получен
функционал
и известны
до уравнений движения
его
(равновесия)
6
ПРЕДИСЛОВИЕ
дело не доводят, а строят последовательность функций, предел которой доставляет функционалу стационарное или экстремальное значение, например, минимизирует значение функционала. Этот способ получения приближенного решения является
наиболее простым и экономичным.
Авторы вышуска ХУ серии „Математика в техническом
университете“ ставят перед собой следующие задачи:
— изложить основы классического вариационного исчисления, подчеркнув при этом особенности и специфику вариационных задач как задач, обобщающих проблему поиска, экстремумов функций многих переменных без ограничений и с
таковыми;
— обсудить основные идси и методологию тсории оптимального управления Понтрягина и метода динамического программирования Беллмана;
— изложить основную идею преобразования вариационных
задач (выявление двойственных вариационных задач) и постросния на, их основе аппроксимаций искомого решсния.
В части ГУ приведены нскоторые примеры применсния вал
риационных принципов при постановкс и решении различных
научно-технических проблем. Извсстныс уравнения математической физики, уравнения движения идсальной жидкости получены на основс принципа Гамильтона. Обсуждены знамсенитая аэродинамичсская задача, Ньютона, вариационные аспскты
проблемы собственных чисел и в этой связи проблема устойчивости конструкций. Рассмотрены динамичсскис и нестационарныс задачи термомсханики.
Основныс источники, использованные при написании этого
выпуска ссрии, включены такжс в список рекомендусмой литсратуры в конце книги.
Мы считаем своим долгом выразить признательность доцентам А.Н. Канатникову, чья критика во многом способствовала совершенствованию изложения, и А.Д. Герман, которая
любезно предоставила нам записи своих лекций по вариационному исчислению. Авторы будут благодарны каждому, кто
выскажет по книге свои замечания.
Задания
для
самопроверки
1. Какие множества называют: а) замкнутыми; 6) открытыми; в) ограниченными; г) компактными? Что называют диаметром множества?
[П
2. Дайте определение точной верхней (нижней) грани числового множества. В чем различие между шт (7)
и т! Ё(т) для действительной функции #(т) одного действительного переменного, определенной на некотором
промежутке числовой прямой?
3.
Напишите
формулу
[|
Тейлора:
а)
для
функции
одного
действительного переменного; 6) для функции многих переменных.
[Ш], [У]
4. Как проверить, является ли функция одного действительного переменного выпуклой вверх (вниз)?
[П]
5. Что такое: а) линейное пространство; 6) евклидово
пространство; в) нормированное пространство? Приведите пример нормы в линейном пространстве. Как вводят в
В” стандартное скалярное умножение?
6.
Как
найти
собственные
векторы: а) линейного
нейном пространстве;
значения
[ТУ]
и собственные
оператора в конечномерном либ) квадратной матрицы?
Что
такое характеристическое
уравнение
матрицы?
[ТУ]
7. Какую квадратичную форму называют положительно (отрицательно)
определенной?
рий Сильвестра.
[ТУ]
Сформулируйте крите-
8. Какую функцию многих переменных называют: а) непрерывной по совокупности переменных; 6) непрерывной по части
переменных?
9. Что называют условным экстремумом функции многих переменных? Как можно найти точки условного экстремума? Что такое множители Лагранжа?
[У]
10. При каких условиях интеграл, зависящий от
метра, есть дифференцируемая функция?
[УП
пара-
8
ПРЕДИСЛОВИЕ
11.
Что называют:
линейным
а} кратным
интегралом;
интегралом;
в) поверхностным
6) криво-
интегралом?
Напишите: а) формулу Грина; 6) формулу Остроградского — Гаусса; в) формулу Стокса. В каком случае значение
криволинейного
ния?
интеграла
не зависит от пути интегрирова-
[УП]
12.
Пусть
дано обыкновенное
дифференциальное
урав-
нение (ОДУ) п-го порядка. Что называют сго: а) частным
решением; 6) общим решением? Как для этого уравнения
ставится задача Коши?
[УПП
13.
Что такос первый интеграл системы ОДУ? Как
ОДУ п-го порядка можно преобразовать в систему п ОДУ
первого порядка?
[УП
14.
Что
называют
нормальной
системой
ОДУ?
Как
для однородной нормальной системы линейных ОДУ
построить фундаментальную систему решений?
[УПП
15. Пусть дана нормальная система ОДУ. Что называют ее:
а) решением; 6) фазовой траекторией; в) интегральной
кривой? При каких условиях фазовые траектории системы не
пересекаются?
[УПП
16. Что такое сходящийся числовой ряд? При каких
условиях данный функциональный ряд сходится на данном
множестве точек:
17.
можно
При
а) поточечно;
каких условиях
утверждать,
что
6} равномерно?
на периодическую
ее ряд
Фурье
сходится
данной точке; 6} на данном промежутке?
18.
Лайте определение:
а)
в) гильбертова пространства.
[1Х]
функцию
к ней:
а)
в
[1], [ПХ]
банахова пространства;
Что называют рядом Фу-
рье элемента, гильбертова пространства? Напишите неравенство Бесселя и равенство Парсеваля.
[1Х]
19. Сформулируйте задачу
дите собственные значения
Штурма
—
и собственные
Лиувилля.
функции
Най-
опера-
тора Штурма — Лиувилля в случае граничных условий в
виде линейной комбинации функции и ее производной. [ХП|,
хШ
ОСНОВНЫЕ
ОБОЗНАЧЕНИЯ
чи»
—
начало и окончание доказательства
#
—
окончание примера, замечания
аЕА,
Аза
—
элемент
а принадлежит
множеству
ство А содержит элемент а)
АСВ,
ВА
—
А (множе-
1-1.1
множество А является подмножеством В (мно-
жество В содержит в себе множество А)
У
—
замыкание множества У
метрическом пространстве
9у
—
граница множества У в нормированном или метрическом пространстве
в
1-1.2
нормированном
ХТ
1-185, ХИТ
М
—
множество натуральных чисел
К
—
множество действительных чисел
С
—
множество комплексных чисел
5”
—
линейное арифметическое пространство
АВ,
|АВ|
—
отрезок,
или
соединяющий
1-1.2
1-1.3
1-4.3, Х
точки А и
ТУ
В, и его длина
ш
а, а
—
вектор (элемент линейного пространства) и столбец
сго координат
[а
—
[а]
ТУ
длина (модуль) всктора
норма
вектора
а
а
ПГТУ
в нормированном
пространстве
ГУ
0
—
нулевой вектор
ПТ
ТУ
скалярное произведение векторов
аи
ПТ, ТУ
10
ОСНОВНЫЕ
т
А
4%А
7
У`ак
—
— —
ОБОЗНАЧЕНИЯ
матрица, транспонированная
определитель матрицы
А
к А
ПТ
ПТ
—
сумма п слагаемых @а1,.... @к,.... @и
1-2.6
—
число К принимает последовательно все значения из
&=1
К =1,п
множества № от 1 до и включительно
1(а),1(=)|
о
—
®(1)
—
вектор-функция скалярного аргумента
7(®)
— —
значение функции }(т) в точкеа
ртаа] (2) —
&(1, = (Р) —
У
производная
ментаф
всктор-функции
скалярного
аргу-
П
р, 1.(х,ч) —
частная производная функции }(5, у) по
переменномух
—
У
градиент скалярной функции /(5) векторного аргументаж
ЛУ
1-2.1
векторная функция векторного аргумента (функция
многих переменных)
ое),
1-2.6
У
функционал, определенный на некотором множестве
функций у(2); значение функционала на функции (в
точке) у(х)
|-[с; |-[сз —
1.2
нормы
в нормированном
пространстве
Са, 6]
1.2
КС|[а,5] — линейное
пространство
отрезке [а, |] функций
С"[а,]
—
нормированное
кусочно
—
гильбертово
на
6.5
пространство
непрерывную 7-ю производную
12(9)
непрерывных
функций,
ТУ,
имеющих
1.2
пространство функций, суммируемых
;
на множестве Я С В^ с квадратом
1Х
11
бу, ду(1)
—
вариация аргумента, функционала, значение вариации в точке т
6у' = (6)
6.Лч,6у]
—
—
52.Лу,6у]
[и]
1.2
производная от вариации бу
(первая) вариация функционала .] в точке у
—
—
вторая вариация функционала .] в точке у
вспомогательный
функционал,
функционалу Г|[ж,и|
Н(яж.р}
и
1.2
5.2
соответствующий
7.2
НФ, ти) — функция Гамильтона и функция Понтрягина
7.2, 7.3
У
—
оператор Гамильтона
А
—
оператор Лапласа
Р(А) и В(А)
—
УП
УП
область определения и область значений опе-
ратора А
10.2
12
ОСНОВНЫЕ
Буквы
Начоертание
ОБОЗНАЧЕНИЯ
латинского
алфавита
| Произно- || Начертание
| Произно-
иснис
шенис
Аа
ВЬ
Се
Аа
ВЬ
Сс
а
бэ
пэ
Мп
Оо
Рр
ра
ра
дэ
Ее
Ре
ЕЕ]
ав
С9
НВ
НН»
е
эф
же
аш
Те
9
КК
БЕ
Маш
Га
41
КА
Р1
Мт
Буквы
Мп
Оо
Рр
эн
о
П2
Ча
91
ку
Вт
9;
ТЕ
Си
Ди
63
ТЕ
ПИи
эр
эс
тэ
у
и
Уу
Ув
вЭ
иот
ка
эль
эм
\ м
Хх
Уу
Да
греческого
И’ № | дубль-вэ
Хт
икс
Уу
игрек
йз
зэт
алфавита
Начер- | Произно- |! Начер- | Произно- || Начер- | Произнотание | шение | тание | шение | тание | шение
А а
альфа,
Ть
пота,
Гр
ро
ВВ
бета,
Кх
каппа
Ус
сигма,
Гу
гамма
А Л | ламбда
Тт
тау
дд
дельта,
М в
ми
Т в | ипсилон
Е = | эпсилон | Ми
ни
Фо
фи
7С
дзета
не
кси
Хх
хи
Ня
эта
Оо | омикрон | Ф ф
пси
9 99
тэта
Пт
пи
Оо
омега
Представлен наиболее употребительный (но не сдинственный) вариант произношения (в частности, вместо „йот“ иногда
говорят „жи“).
ЧАСТЬ
1
Классическое
вариационное
исчисление
Вариоциюнное исчисление в широком смысле
это учение об изменении функций,
ц в качестве токового оно оказывается
продолжением
дифференциального
и
чин-
тегрального исчислений.
При током понимании, например, исследования Пуанкаре о проблеме треф тел
образуют главу варцационного исчисления, поскольку в них Пуанкаре из известных траекторий, обладающих некоторым
свойством, с помощью принципа варъирования получил новые траектории, обладащие нужными свойствами.
Д. Гильберт
1. ОСНОВНЫЕ
Разнообразие
минимума
задач,
некоторой
Это отражает
ПОНЯТИЯ
приводящих
интегральной
мудрое высказывание
к поиску
величины,
максимума
весьма,
великого Эйлера:
или
велико.
„В мире
нет ничего, в чем не был бы виден смысл какого-либо максимума или минимума“.
1.1. Задачи,
приводящие
к вариационным
проблемам
Примеры успешного решения экстремальных проблем можно найти ужс в древней истории.
Пример 1.1 (задача Дидоны).
В [Х в. до н.>. финикийская царевна Дидона и несколько ее спутников, спасаясь от
преследования тирской знати, бежали из г. Тира и высадились
на африканском берсгу Средиземного моря. Решив поселиться именно здесь, Дидона упросила местных житслей отдать в
ее распоряжение участок земли, который можно охватить шкурой быка
(чувствуете
двусмысленность
постановки
вопроса?).
Простодушный правитель тех мест не понял всей глубины замысла и согласился отдать беглецам участок земли, который,
по его разумению, должен был по площади быть равным площади расправленной шкуры быка. Дидона же после заключения
соглашения разрезала шкуру быка на тонкие полоски, связала
их в длинный ремень и ограничила им довольно значительную
территорию на берегу моря. Так был заложен город Карфаген,
который
впоследствии
был-таки
разрушен
римлянами.
Задача, которую поставила Дидона, можст быть сформулирована, следующим образом. Найти такую кривую заданной
длины Г (Г в упомянутой выше истории — длина ремня из
16
1. ОСНОВНЫЕ
ПОНЯТИЯ
шкуры быка), которая ограничивает на плоскости фигуру наибольшей площади.
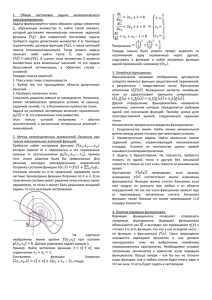
Формализуем задачу. Считая берег моря прямолинейным,
расположим прямоугольную систему координат Оху так, чтобы ось Ох совпала, с берегом моря.
у
Предположим,
линейная (морская) часть границы участка земли есть отрезок
[а, 6] оси Ох,
а криволи-
нейная часть является графиком гладкой (т.е. непрерыв-
5
но
[@)
что прямо-
а
$
х
диффоренцирусмой)
ции
Рис. 1.1
у=у(т),
отрезке
[а,8]
функ-
определенной на
(рис.
1.1).
При
этом
у(а) = (6) =0.
(1.1)
При сделанных предположениях длина Ё криволинейной части
границы вычисляется по формуле
[УГ]
ь
=
Г
1
(2)2 ат,
(1.2)
а, площадь 5 земельного участка, — по формулс
ь
5=
[бе
(1.3)
Итак, тробустся найти такую гладкую функцию у = у(х),
которая удовлетворяет условиям (1.1) и (1.2) (Г фиксировано)
и обеспечивает интегралу (1.3) максимальное значение.
Задачи подобного рода ставили и решали
нальными,
способами)
еще
Аристотель
#
(своими, ориги-
и Архимед.
химед установил замечательное свойство окружности:
Так,
Ар-
из всех
1.1. Задачи,
приводящие
к вариационным проблемам
17
замкнутых кривых, длины которых равны некоторому заданному значению, окружность охватывает наибольшую площадь;
из всех замкнутых кривых, которые охватывают заданную плошадь, окружность имест наименьшую длину.
Несмотря на наличие древних прецедентов, моментом рождения вариационного исчисления как математической дисциплины принято считать 1696 год, когда в июньском номерс
журнала „Аса, ЕгИАНогит" появилось письмо И. Бернулли, в
котором он писал: „Остроумнейших математиков всего мира
приветствую я, Иоганн Бернулли! Людей высокого ума нельзя
ничем более привлечь к работе, как указать им трудную и вместе с тем полезную задачу, решением которой возможно и славу
приобрести,
и оставить
что заслужу
благодарность
Паскаля,
тикам
Ферма
нашего
испробовать.
по себе вечный
и других
времени
Я надеюсь,
ученого мира, если я, по примеру
великих,
задачу,
предложу
которая
хороши ли те методы,
как велика сила их ума.
памятник.
даст
лучшим
им
матема-
возможность
которыми они владеют,
и
Если кто-нибудь найдет решение пред-
ложенной задачи и сообщит об этом мне, то я объявлю ему
публично заслуженную хвалу“.
Векоре были даны три решения задачи И. Бернулли: первое
принадлежало Якову Бернулли, второе — Лопиталю, третье
появилось в английском научном журнале без подписи автора,
но И. Бернулли без труда узнал в авторе Исаака Ньютона по
его „львиным когтям“.
Вот задача, предложенная И. Бернулли.
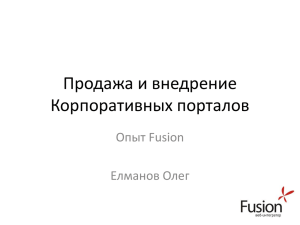
Пример
1.2
(задача
о брахистохроне).
В вертикаль-
ной плоскости через две данные точки О и В, не лежащие на
одной вертикали,
провести кривую
(т.е. найти ее уравнение),
двигаясь по которой, материальная точка под действием силы
тяжести переместится из верхней точки в нижнюю за кратчайшее время
(рис. 1.2).
Ту же задачу можно
сформулировать
и
так: как спроектировать крышу дома, чтобы капли дождя скатывались с конька крыши за наименьший промежуток времени.
18
1. ОСНОВНЫЕ
ПОНЯТИЯ
Предположим,
что начальная
скорость падающей точки равна
нулю, а силы трения отсутствуют.
К моменту, когда расстояние
от начального
положения
О по вертикальной
моугольной
Рис.
Оху
1.2
будст
системы
равно
точки
оси Оу
пря-
координат
у, точка
потс-
ряет потенциальную энергию, ко-
торая уменыпится на ду (т — масса точки, 9 — ускорение
свободного падения). Кинетическая энергия при этом увеличится на 72/2 (% — скорость точки). В силу закона сохрансния энергии (ведь трение отсутствует) имеем
тп) 2
>
тду = 0,
откуда,
и =
\/299.
Далее, предполагая, что траектория движения есть кривая
у = (т), причем у(х) —
отрезке [а, 5], получаем
гладкая
_ 48 _
УТ+
о
где 43 —
му
дифференциал
функция,
(у)
на
ах
#
длины дуги кривой;
М2 = УТ+ (у 4х,
и мы приходим к уравнению
=
определенная
м1+
У
(и)?
^^ Ч.
у29у
# — время.
Поэто-
1.1. Задачи, приводящие
к вариационным проблемам
19
Из этого уравнения находим время, необходимое для перехода,
из точки О в точку В:
УТ ()*
| а.
ь
В
(1.4)
Извсстные координаты начальной и консчной точек дают краевые условия для функции у(х):
у(0) =0,
Таким образом,
(5) =ув.
(1.5)
нужно найти гладкую функцию
у(7), для
которой # —+ шш при краевых условиях (1.5).
Пример
1.3
(задача
о преломлении
света).
Согласно
принципу Ферма, луч света, выходящий из точки А и попадал
ющий
в точку В, избирает путь, время перехода по которому
является наименьшим. В однородной среде скорость света, постоянна, а свет распространяется по прямым. Если же среда
неоднородна, то скорость света изменяется от точки к точке, а,
траектории лучей света, уже не будут прямыми. Пусть средой
является атмосфера. Поскольку плотность воздуха зависит от
высоты у над уровнсм моря, то правомерно предположить, что
и скорость света о зависит от у и выражается с помощью известной функции %(у). Определим траекторию луча света, из
данной
точки
А в данную
точку В.
В вертикальной
плоско-
сти, проходящей через точки А и В, выберем прямоугольную
систему координат так, что ось Ох горизонтальна и расположена на уровне моря. Нам известны координаты А(а, ул) и
В(5, ув). Считаем, что луч света распространяется по кривой,
являющейся графиком гладкой функции у(т), определенной на
отрезке [а, 65] (рис. 1.3).
При
= \/1+
сделанных
(/)24х —
предположениях
дифференциал
имеем
длины
__ 48
5(у) =
где @5 =
дуги кривой у = 9(х).
20
1. ОСНОВНЫЕ
ПОНЯТИЯ
Поэтому
и время, необходимое для перехода света, из точки А в точку
В, выражается интегралом:
С ТУЕы
‘-/
а
$
(1.6)
Задача состоит в определении такой гладкой функции у = у(х),
удовлетворяющей условиям у(а) = уд, у(5) = ув, что интеграл
(1.6) получает наименьшее значение.
Сравнив (1.6) и (1.4}, отметим, что задача о брахистохроне — частный случай задачи о преломлении света. Этот факт,
подмеченный впервые И. Бернулли, представляет собой так нал
зываемую оптико-механическую аналогию”.
Пример
щения).
1.4 (задача о минимальной
Пусть
требуется
в плоскости
поверхности
хОу
соединить
враточки
А(а, ул) и В(5, ув) кривой так, чтобы боковая поверхность тела, полученного от вращения этой кривой вокруг оси Ох, имела,
наименьшую площадь (рис. 1.4).
*См.: Курант Р., Гильберт Д. (Здесь и далее в подстрочных библиографических ссылках указаны фамилии авторов работ, приведенных в списке
литературы в конце книги.)
1.1. Задачи, приводящие
Как и выше,
к вариационным проблемам
предполагаем,
21
что искомая кривая являстся
графиком гладкой функции (1). определенной на отрезке [а, 6].
Вспомнив формулу
врашения
для плошади
5 боковой поверхности тела
[ТУ], получим задачу
6
в=2т
ь
[уз =2т
а
[|
1+ (у')2 4х — пит
(1.7)
а
с краевыми условиями (а) = ул, у(6) = ув.
Пример 1.5 (задача о геодезических линиях).
На
поверхности, заданной в прямоугольной системе координат
Охуг уравнением ф(1,у,2) = 0, проведем кривую, соединяющую
две точки А и В этой поверхности и имеющую наименьшую
длину (рис. 1.5).
Рис.
1.5
Наименьшие по длине линии между двумя точками некоторой поверхности являются геодезическими линиями этой
поверхности.
Например, геодезическими линиями плоскости
являются прямые, геодезическими линиями на сфере
дуги
большого круга.
22
1. ОСНОВНЫЕ
ПОНЯТИЯ
Предположим, что поверхность ф(т,у,2) = 0 является гладкой, а искомая кривая может быть задана уравнениями у = у(5),
#=2(т), те [а, 8], с помощью гладких функций у(т) и 2(5). Тогда ее длина, №, равна;
В
р=
ь
[
Матталтая
= |
А
Ут
е,
а
Задача свелась к определению
функций у=у(т)
таких гладких на отрезке
[а 6]
из = 2(1), что
ф(х, ч(), 2(2)) =0,
(20) =,
(а) =,
2(10) =20,
а интеграл
(1.8)
2(71)=21,
(1.8) принимает минимальное значение.
#
Оригинальность сформулированных задач — в том, что нсизвсстными в них являются функции, которыс должны сделать
значение интеграла наименьшим.
1.2. Основные
определения
Пусть задано некоторое множество М функций. Функционалом / на М называют отображение У: М — В множества,
М в множество В действительных чисел. Функции из области
определения М данного функционала будем называть дотустиьмььии функциями.
Приведем
некоторые
на множестве
М
типичные
примеры
всех функций,
функционалов:
определенных на отрезке
(0, |, можно задать функционал формулой „Л[у| = у(0);
— на множестве М = С'[а,8], интограл
ь
ли = [ Укуеь
а
1.2. Основные
определения
23
представляющий собой длину кривой у = (1), т Е [а, 8], задает
функционал;
— на том же множестве М = С([а, 6] можно определить функ-
ционал с помощью формулы
ь
[ гут
ЛУ
ь
уу
(отношение интегралов представляет
масс кривой у = 9(2) [УТ].
собой
абсциссу
центра
Замечание 1.1. Уже по приведенным примерам видно, что
интеграл, с помощью которого задается функционал, может
быть достаточно сложным.
Упрощая запись, в таких интегралах в подынтегральном выражении опускают аргументы
неизвестной функции. Так, например, один из указанных выше
интегралов записывают следующим образом:
ь
] м1+ (и)? ах.
Мы и в дальнейшем будем придерживаться этого правила, а
подробную запись будем использовать лишь в отдельных случаях, когда требустся подчеркнуть характер функциональной
зависимости.
Область определения М функционала может
ную структуру. Будем предполагать, что М —
пространство, норму произвольного элемента
обозначать |5 |. Если в данном нормированном
иметь различнормированное
х в нем будем
пространстве
рассматриваются различные нормы, то их будем различать добавлением индекса, например
| ||>. Приведем примеры.
24
1. ОСНОВНЫЕ
ПОНЯТИЯ
Пример 1.6. а. Банахово пространетво С[а,В] функции
{ (+), непрерывных на отрезке [а, 6], норма в котором определяется формулой
с
= швах |{()|.
[4,8]
6.
Банахово пространство С\[а,] функций, непрерывно
дифференцируемых на отрезке [а, $]. Норму в этом пространствс можно определить так:
Ле: = шах +}.
в. Гильбертово пространство Т2[а,6] функций, суммирусмых с квадратом на отрезке [а, 6]. Нормой в этом пространстве
являстся
ПУ», =.
При изучении функционалов вводят ряд понятий, аналогичных соответствующим понятиям для функций: непрерывность,
дифференцируемость,
экстремум
и др.
Если функционал „Л[у| задан на линсйном пространстве Ри
представляет собой линейную форму (линейную функцию) на
этом пространстве, т.е. для любых 91, у2 Е Г и любых о1, 2 ЕВ
Даиул - а2у2] = о Луи + 05 Лу],
то функционал называют линейным.
Пример
1.7. Функционалы
ь
лы - [у
а
зы)
1.2. Основные определения
25
линейные, а функционал
ь
и
таковым
не
является.
(1 + у(т
2 т
Г
Сложность вариационного исчисления, да и ряда других
примыкающих математических дисициплин, состоит в том, что
функции, сопоставляющие аргументу некоторое значение, сами
рассматриваются как аргументы других отображений — функционалов. При этом характер зависимости, которую функция
представляет, не является существенным. Учитывая эту сложность, мы в дальнейшем будем называть точками функции,
рассматриваемые как элементы некоторого множества (как
правило, нормированного пространства) и как аргументы некоторого функционала. Это аналогично тому, как мы часто
называем
точкой
аргумент
действительной
функции
действи-
тельного переменного.
В нормированном пространстве можно ввести понятия окрестности точки и непрерывности отображения [1Х], которые
аналогичны соответствующим понятиям для числовых функций
[1].
Так,
-окрестностью
точки
уд нормированного
про-
странства, № называют множество О. (у) = {уЕМ: |у-%| <=}.
Если в данном нормированном пространстве рассматриваются
несколько норм, то каждой норме соответствует своя =-окрестность фиксированной точки пространства.
Рассмотрим банахово пространство С\[а,6], введенное в
примере 1.6, 6. Наряду с ранее указанной нормой || ||сл в этом
пространстве часто используют и другую норму:
>; = шах
[5]
(+) |.
Отметим, что с нормой ||| с линейное пространство С"[а,6] уже
не является банаховым.
26
1. ОСНОВНЫЕ
Пусть
стью
Е —
положительное
функции 0 © Са,
ПОНЯТИЯ
число.
Сильной
-окрестно-
назовем множество
функций уЕ
Е С'[а, |, для которых
[у —
Слабой
уо[с: = тах |у(#) — и (2) < =.
[6]
Е-окрестностью
той жс функции
назовем
множс-
ство функций уе С'[а,6], для которых
[у зо
= паж, (2) — м0 (2) + (<) — 962) } <=.
Из определений ясно, что функция у(5), попавшая в слабую
=-окрестность функции 0(5), попадает и в сильную =-окрестность этой же функции.
Другими словами, слабая =-окрестность всегда содержится в сильной =-окрестности.
<Рункционал „/у|, определенный на нормированном пространстве М, называют непрерывным в точке щ Е М, если
для всякого числа д > 0 существуст такая =-окростность точки 0, что для любой точки у из этой окрестности выполнено
неравенство
|7 — Лиз] < 5.
В нормированном пространстве М функций выберем некоторую функцию у0(1) и пусть 9(1) — произвольная функция из
М. Разность (1) — у(1) = 6у(х) называют вариацией функции у0(х). Сразу подчеркнем отличие понятия вариации от
приращения функции в точке. Приращение функции в точке то есть число, равное разности двух значений функции,
а вариация
это функция, равная разности двух функций,
рассматриваемых в качестве аргумента функционала. Для данного функционала Лу] с областью определения М и данной
функции уЕ М будем называть вариацию ду этой функции
допустимой варчацией, если у+дуЕ М.
Для дифференцируемых
функций
следует
различать
производную
бу’ = (6%)’и вариацию производной 0(у').
вариации
Значением первого
1.2. Основные
понятия может
определения
быть лишь функция,
27
являющаяся
производной
допустимой вариации, а значением второго — любая допустимая вариация.
Рассмотрим
приращение
функционала
/|у|, определенного
на нормированном пространстве С\[а,6], в точке у, соответствующсс вариации (приращению аргумента) ду:
АЛи = Лу+ди - ЛУ.
Пусть
сго
можно
представить
как
(1.9)
сумму
АЛу| = Лу+ ди - Лу = Лу,69 + 0(9),
(1.10)
где Л[у,ду
функционал, линейный относительно ду, а
0(6у} — функционал, являющийся бесконечно малой более высокого порядка по сравнению с ||65|| при ду — 0 относительно
нормы | |с1 в Са, |, т.е.
[6(69)| —0
69 сл
при
|6у|-—0.
Тогда функционал „Л[у| называют дифференцируемым в точке у, а линейный функционал Л! [у,ду] — сильным
циалом (дифференциалом Фрече).
Понятие
понятию
дифференцируемости
функционалов
дифференцируемости функций.
Функция
дифференаналогично
/ (15) одного
действительного переменного дифференцируема в точке т,
если ее прирашение А}{(7) в этой точке можно представить в
виде [1]
АЁ(:) = ААз + о(Ат),
где А не зависит от Ах, а о(А)
{Ах > 0 при Ах +0.
Обратим
внимание на то, что в этом представлении первое слагаемое
ААт линейно относительно прирашения Ах.
Коэффициент
А первого слагаемого представляет собой производную }"(1)
функции
в точке х.
28
1. ОСНОВНЫЕ
Первой вариацией
называют предел
У
°
9Лу,ду]
аду
д.[у, 9] = Ша Лу
ПОНЯТИЯ
функционала
— ЧФ
4
аа
оду] — ЛУ = —
@—0
а
Лу
аду]
/ в точке у
а—0
.
(1.11)
Этот предел представляет собой функционал, который каждой
вариации бу (при фиксированном у} ставит в соответствие число. Если этот функционал линеен (по ду), то его называют
слабым
дифференциалом
(дифференциалом
Гато)
в точ-
ке у.
Замечание 1.2. В вариационном исчислении часто под первой вариацией понимают то, что мы назвали дифференциалом
Гато. Другими словами, считают, что первая вариация функпионала, линейна относительно вариации функции.
Теорема 1.1.
Если функционал Лу] дифференцируем
точке у, то его дифференциал Гато в точке у существует
совпадает с дифференциалом Фреше.
< Выберсм
предел
нскоторую
вариацию
—
5.Лу,бу] = аит Лутобу
[82
6у
в точке
в
и
у и вычислим
ЛИ _ т лу обу] + о(абу) _
а
= №
а—0
[2
оу, ди] +0= Лу, ди.
[63
Здесь второе равенство справедливо в силу дифференцируемости „Лу, третье
в силу линейности „1 относительно ду. При
этом следует учесть, что
.
Ши
@—>0
| 0(@0у
(
в
}
|= И| |9 аду
|
так как при © $0
[аду = |@ [6 — 0.
И. 0—0,
1.2. Основные определения
ДЛоказанное
равенство
показывает,
29
что
первая
вариация
6.Лу, бу] дифференцируемого функционала представляет собой
функционал, линейный по ду. Поэтому, согласно определению,
этот функционал и есть дифференциал Гато, который оказался
равным дифференциалу Фрешс.
Утверждение,
ал Гато
может
№
обратное теореме 1.1, неверно:
сушествовать
дифференци-
и у недифферснцирусмого
функ-
пионала. Чтобы показаль это, обратим внимание на следующее,
Понятия дифференциала, Фрешс и дифференциала Гато нс связаны с конкретным видом нормированного пространства, и
их можно рассматривать, например, в консчномерном линсйном арифметическом пространстве. В этом случае функционал
ссть просто функция многих переменных, а дифференцирусмость такого функционала совпадает
с дифференцируемостью
сго как функции многих переменных [У]. Первая вариация
функционала в конечномерном случае соответствует производной по направлению. Действительно, ссли задан „функционал“
1: В" > Е, то „вариацией“ аргумента 5 являстся произвольный
вектор дж. Если этот вектор имеет единичную норму |д=|| = 1,
то значением первой вариации
„функционала“ на этом приращении будет
+ ад=)
[2,02] = Ша Из
@—0
[@'
— (з)
_ 9]
— бт’
т.с. производная функции { по направлению
п =д5ж.
В общем
случае
Пбвьбы
где п =
означаст.
от
[1621] `
Линейность
= ва 5.
первой
что псрвая вариация
вариации
представлястся
относительно
05
через скалярнос
произведение
Н[,0ж] = (а, дж),
(1.12)
30
1. ОСНОВНЫЕ
ПОНЯТИЯ
где а — некоторый вектор. Отметим, что для дифференцируемой функции { вектор а совпадает с градиентом этой функции.
Функция двух переменных
(альт) =.
11
0,
= 15,
(тт,
22) 7 (0,
0);
217212 или (ту, 2) = (0, 0)
имеет производную в точке (0, 0) по любому направлению, рав-
ную нулю, и, следовательно, имеет в этой точке „дифференциал
Гато“, так как производную по направлению можно представить в виде (1.12), ссли в качестве а взять нулевой всктор.
В
то
же
время
эта
функция
нс является
ке (0, 0), а потому не дифференцируема
имеет „дифференциала, Фреше“.
непрерывной
в точ-
в этой точке,
т.е. не
В вариационном исчислении важнейшими являются функционалы, заданные с помощью интегралов, например
ь
|
| Кель,
белым
а
а
а,
Г Каира, лу) Ча
р
и т.д.
Такой функционал будем называть интегральным
функционалом, а подынтегральную функцию соответствующсего интсграла — интегранто.м.
Выясним
и слабого
достаточные
дифференциалов
условия
для
существования
сильного
у функционала,
Ь
ЛИ= ] Калу) 4х,
заданного
на нормированном
пространстве
(1.13)
С\[а,6]
с нормой
|<.
Пусть Г
дважды непрерывно дифференцируемая
функция трех переменных. Запишем приращение функционала,
на некоторой функции у(1) Е Са, 6], соответствующее некото-
1.2. Основные определения
рому приращению
31
ду(х} аргумента:
ь
[й
АЛ=Лу+ду- Лу] Я
[3
а
ь
= (ле
а
+ ду у’ +6) — Легьу у) ат.
Применим к подынтегральной функции формулу Тейлора:
р
Ал= ] (лись) бу
1
Ли
лу (хуу)бу
а
+96. +96) (бу)? + 1 „(ту
1
+
Луи (Фу
.
9буу +96) бубу! +
9буу + 9ву') (ву) 4х,
(1.14)
где 9Е
(0, 1), вообще говоря, зависит от переменного т. Отметим, что первые два, слагаемых подынтегральной функции в
(1.14) представляют собой непрерывную функцию переменного
1. Значит, оставшиеся слагаемые в совокупности образуют непрерывную функцию, которую можно интегрировать. Опеним
соответствующий интеграл*:
ъ
1
"
1
ь
<> Г (ие
+ эвиШву |+ |9) <
<М
<2М (6 — а) |8
= 06).
“Векторный аргумент функции } и ее производных не выходит за пределы некоторого замкнутого ограниченного множества С' в №3. Поэтому
из непрерывности функции } и ее производных следует их ограниченность
на С [У].
32
1. ОСНОВНЫЕ
ПОНЯТИЯ
Здесь
М=
шах
|7уу
Так как 9у’4т = (бу)'ах = а(6у),
ь
В
1}.
то, интегрируя по частям
[2
Глальубу а = || белье
а
=
а
,
= (лреьин ви)
— | п; рбуулрувифь
а
находим,
виде
что приращение
ь
—
й
АЛ = ] [С
п __
)
функционала
4
Е Лир
в
+ (лАельу
ву) | +06), (15
в виде
(первые
представить
у / }) буат +
а
т.е.
можно
суммы
два
функционала,
слагаемых)
ка относительно
бу при
линейного
и бесконечно
бу +0
(третье
малой
относительно
высшего
слагаемое).
ду
поряд-
Значит,
дифференцируемость функционала, доказана, и найден его дифференциал
Фреше,
который
можно
представить
в виде
[2
льву = | (бу Лубы а,
(1.16)
а
поскольку первые два слагаемых в (1.15) получены преобразованием интеграла (1.16) интегрированием по частям.
Для существования дифференциала Гато достаточными являются более слабые условия непрерывности функции } и ее
частных производных Л и Фи.
Действительно, вычисление
1.2. Основные определения
33
первой вариации сводится к дифференцированию интеграла по
параметру:
ь
д
.
5.Лу,би = т
+ аду,у’ + аду") ат
а=0
ь_
= [эк
[п
елучнобиу
тобу) пе]
=
ь
[Ай
убу)а,
а
а
Для законности такого дифференцирования достаточно непрерывности подынтегральной функции и ее частной производной
по параметру [УП], что обеспечивается поставленными условиями. Полученная первая вариация является линейным функционалом относительно ду, т.е. представляет собой дифференциал
Гато.
Говорят, что функционал Л[у|, определенный на линейном
пространстве С а,6], достигает сильного (слабого) минимума на функции (в точке) у, © С'[а,б] (или у, доставляст
соответствующий минимум функционалу /[У|), если найдется такая
сильная
(слабая)
=-окрестность
функции
у.(т),
что
для любой функции у(х) из этой окрестности выполнено нсравенство Лу > Лу,„|.
Если для любой функции из этой
окрестности, отличной от у, (1), указанное неравенство является строгим, то такой минимум называют строгим. Сильный
(слабый) максимум вводят аналогичным образом. Сильные
(слабые) максимумы и минимумы объединяют под общим названием сильный (слабый) экстремум.
Функцию у,(х1),
доставляющую
сильный
или
слабый
„Лу, будем называть точкой
ма
экстремум
функционалу
соответствующего
экстрему-
функционала.
Поскольку всякая функция, принадлежащая слабой =-окрест-
ности функции 1/.(1), заведомо входит в ее же сильную =-окрестность, то всякий сильный экстремум одновременно является
точка
и слабым.
сильного
Действительно,
минимума
пусть,
функционала
например,
[у].
у,(т)
Это
есть
значит,
34
1. ОСНОВНЫЕ
что для нокоторого
ПОНЯТИЯ
= > 0 для любой
функции
у(5),
для кото-
рой |у-у.|с <=, выполнястся неравенство «7[у] > Л[у„|. Если
[у-у|с: <=, то также и |[у-у,
[с <=. Поэтому неравенство
Лу] > Лу+| верно для любой функции (7) из слабой =-окрестности функции у, (т), т.е. у„(т) является точкой слабого минимума для [Ч].
Однако слабый экстремум функционала, не обязательно яв-
ляется его сильным экстремумом. Это объясняется тем, что
функции, близкие по своим значениям (попадающие в сильную
=-окрестность), могут иметь значительные расхождения в производных, а это, в свою очередь, может повлиять на значения
функционала.
Рассмотрим функционал
|2)
Ло
Функция
}() =ЁР-#
при
Та
1 =0
имеет
локальный
минимум,
равный нулю. Этот минимум является строгим на интервале
—1<#<1.
Значит, если функция у(2) © СЦа, ] подчиняется неравенству
на отрезке
|У|си
<1,
то интегрант
[4,6] неотрицатслен,
нашего
функционала,
а функционал имест нсотри-
цательное значение. Из этого следует, что функция у„(5) =0
является слабым минимумом функционала. Нетрудно, однако,
придумать функцию, которая удовлетворяет условию |у||с <=
для произвольного, наперед заданного = > 0, но значение функционала на которой будет отрицательным (например, можно
взять у(5} = 0,5 зт(Кт), выбрав подходящий параметр А). Следоватсльно,
Отметим,
у» нс являстся сильным экстремумом функционала.
что, как правило, нахождение слабых экстрему-
мов функционала являстся болес простой задачей по сравнснию с нахождением сильных экстремумов. Это объясняется, в
частности, тем, что функционалы, обычно рассматриваемые в
вариационном исчислении, непрерывны относительно „слабой“
1.2. Основные определения
35
нормы |'|с. пространства, С\[а,6], но далеко не всегда, непрерывны относительно „сильной“ нормы ||. |с. Таким, например,
является функционал, рассмотренный выше.
Замечание 1.3.
Поиск экстремумов функционала, базируется, как и в случае поиска экстремумов действительной
функции
димых
действительного
и
достаточных
переменного,
условиях.
на различных
Из
изложенного
необхо-
выше
вы-
текает, что любое необходимое условие слабого экстремума
являстся в то же время и нсобходимым условием сильного экстремума, а любое достаточное условие сильного экстремума
является достаточным условием и слабого экстремума.
Поэтому доказываемая ниже теорема для слабых экстремумов
названа
как
необходимым
может
условисм
использоваться
и
для
экстремума
слабых,
и
функционала,
для
сильных
так
экстре-
мумов.
Теорема
ционала).
мума
1.2 (необходимое
условие экстремума
функ-
Если функционал (1.13) достигает слабого экстре-
во внутренней
точке
у.(х)
своей
области
определения,
причем в этой точке существует дифференциал Гато, то этот
дифференциал (первая вариация) в точке у,(2) обращается в
нуль:
д. [у»,0%] = 0.
(1.17)
< Пусть, например, функционал „/[у| на функции у, (1) достигал
ст слабого минимума.
Рассмотрим функцию ф(а) = Лу» + аду],
имея в виду, что вариация бу фиксирована.
Из условий теоре-
мы вытекает, что эта, функция имеет экстремум в точке в = 0.
Действительно, существует такое = >> 0, что в слабой =-окрестности выполняется неравенство /[у| > Лу„|. Если у = у, + аду,
то при [а] < &/ [|6]
у —
т.е. функция
у(т)
с!
имеем
уса = [абс
попадает
= @ [69 с1 < в,
в слабую
=-окрестность
у+(2). Следовательно, Лу] > Лу» |, или ф(а) > $(0).
функции
36
1. ОСНОВНЫЕ
ПОНЯТИЯ
Из сушествования дифференциала Гато функционала, „Л[у| в
точке у» следуст дифференцирусмость функции (а)
при а = 0.
В самом деле, зафиксируем произвольную вариацию ду.
существует предел
а=0
—
т- (о)
а=0
Ув табу — Ли]
а
Ге
= р
В ВСву)] Л] _
па
— ры 2-98]
в
Во
_В
В+
= 9-7 [у», 6.
— ЛУ]
+ аб
У
о.
,
п
@—-0
Тогда,
= -д.Лу-, -6/ =9Лу,, 6.
Односторонние производные совпадают. Следовательно, существует производная ’(0) [П].
Так как д(а) имеет минимум в точке а = 0 и дифференцируема в этой точке, то ‹’(0) =0 (необходимое условие локального
экстремума для функции одного переменного [1]).
Но это
равносильно тому, что д./[у,,0у] = 0. Поскольку вариацию ду
можно выбирать произвольно, заключаем, что дифференциал
Гато равен нулю. №
1.3. Основные
леммы
вариационного
исчисления
Докажем носколько утверждений (часто называемых основными леммами вариационного исчисления), которые
будем активно использовать в дальнейшем.
Лемма
1.1 (лемма
прерывна на отрезке
Лагранжа).
[а, 6] и для любой
Если функция }(5) небесконечно дифферен-
цируемой на [а,6] функции 7(т), для которой 7(а) = я (6) = 0,
1.3.
Основные
выполнено
равенство
то }(1} =0
на [а, 6].
леммы
вариационного
риац.
исчисления
37
4 Предположим, что в некоторой точке 5% © [а, В] функция } (5)
отлична, от нуля.
Не теряя общности, мы можем предполагать,
что /(то) > 0.
Тогда,
можно
интервал
выбрать
в силу непрерывности
(с, 4),
окружающий
функции
{(т),
точку
10 Е
то,
Е (с, а) с [а, 5] на котором функция }(5) положительна.
Нетрудно показать, что функция
е— 1/5,
&>0;
0,
т <0
имеет производную любого порядка в каждой точке числовой
оси. Поэтому функция 1 (5) = ф(х — с)ф(а- т) бесконечно дифференцируема, и при этом отлична от нуля только в интервале
(с, а). Значит,
ь
| Неукодаы = | ееуе)ат > 0,
а
так
как
подынтегральная
функция
непрерывна
и положительна,
на (с, 4).
Итак, предположение, что {(5) отлична от нуля хотя бы
в одной точке, ведет к нарушению условий леммы. Следовательно, если для функции } (7) выполняются условия леммы, то
1(2) =0. №
Замечание
печить
1.4. а. Назначение доказанной леммы — обес-
достатоттные
условия
интегрального
нии которых заданная функция обращается
типа,
при
в нуль.
выполне-
Она может
38
1. ОСНОВНЫЕ
ПОНЯТИЯ
формулироватъься для различных классов пробных функций
(т).
При этом, чем уже класс этих функций, тем сильнее
утверждение леммы и тем проще проверка достаточных условий. Класс (15°, используемый в приведенной формулировке
леммы, выбран из практических соображений.
б. Доказанная лемма легко обобщается на общий случай
функций многих переменных. Например, в двумерном случае
верно следующее утверждение. Если функция /(х,у) двух действительных переменных непрерывна в ограниченной области
СЕЕ? и для любой функции я(т,у), бесконечно дифференцируемой в области С, непрерывной в замыкании @ = С +94
области и равной нулю на границе ОС области С, верно рал
вснство
]
(еле, у) ахау = 0,
[@
то }(т,у) =Ов
ет
С. Доказательство этого утверждения повторя-
доказательство
леммы
отличаясь
лишь
тем,
что
пробной следует взять функцию 77(5,у) = ф(г Ру
ющуюся
в
качестве
2), обраща-
в нуль вне круга 22 + у? =г?.
Лемма 1.2 (лемма Дюбуа-Реймона).
Пусть функции
#(+) и 9(х) непрерывны на отрезке [а, 6] и для любой бесконечно
дифференцируемой на [а, 6] функции 7(х), для которой (а) =
= (6) =0, выполнено равенство
ь
Ги
1) + 9(т)"(2))
ат = 0.
(1.18)
Тогда функция }(%) непрерывно дифференцируема на [а, 6] и
(т)
- 9(т) = 0на [а, 5].
(1.19)
«< Непрерывная функция 9(5) имеет первообразную на отрезке
[а, , которая определяется с точностью до постоянной.
Суще-
1.3.
Основные
леммы
вариационного
риац.
исчисления
39
ствуст такая первообразная С (т) функции 9(5), что
(1.20)
Гб) -выуа=0.
Действительно, если Со(т) — некоторая фиксированная первообразная
функции
9(5),
то любая
первообразная
С(х)
может
быть представлена, в виде С'(5) = Со(1)
+С. Подставляя это в
равенство (1.20), получаем условие на постоянную С:
ь
ь
До
- воду
— | баг=0.
Отсюда находим
й
ь
со
| ((®) быв).
а.
Итак, пусть С(2) — первообразная функции 9(5), удовлстворяющая равенству (1.20). Тогда для любой пробной функ-
ции 7(1) © С° [а,6], 9(а) = 7 (6) =0,
интегрирования по частям:
еть
имеем,
согласно
формуле
д=- [веко 4 =
а
= @(®) (=) ‚- [авемке ах = - [сек Чт.
Поэтому равенство (1.18) равносильно следующему:
ь
ие
— С (2)
(т) 4 =0.
(1.21)
40
1. ОСНОВНЫЕ
ПОНЯТИЯ
Рассмотрим произвольную пробную функцию (1), удовлетворяющую условиям леммы. Обозначим
С, =
1
фа
ь
ое
ах.
а
Функция
является бесконечно дифференцируемой, и при этом С(а) =
= С(5) =0. Согласно условию леммы, для такой функции верно
равенство
(1.18) и, следовательно, равенство
(1.21), т.е.
Ги
[ое - веуевуш =
а
В силу соотношения ('(5) =я(2} — С» получаем
Так
как
пробная
функция
7(5)
выбиралась
произвольным
образом, по лемме 1.1 Лагранжа заключаем, что }(5)—С(т) =0.
Но функция С'(2) дифференцируема и С"(х) = 9(1). Поэтому и
функция /(т) дифференцируема и ]’(т) = 9(1). Так как 9(7)
непрерывна, то } (5) непрерывно дифференцируема. №
1.4.
Некоторые
замечания
о
задачах
1.4. Некоторые
о задачах
вариационного
исчисления
41
замечания
вариационного
исчисления
Приведенные выше примеры иллюстрируют тот круг задач,
которыс изучает вариапионное исчисление.
Можно сказать,
что задача вариационного исчисления (или просто вариационная задача) — это задача, поиска экстремума функционала, заданного на некотором множестве М функций, которые
удовлетворяют определенным ограничениям.
К вариационным задачам также относят задачи поиска точек в области
определения функционала, в которых выполняется необтодимое условие экстремума функционала, т.е. первая вариация
функционала обращается в нуль (такие точки называют стационарными точками функционала).
В вариационном исчислении трудность при нахождении экстремума может возникнуть вследствие того, что область определения рассматриваемого функционала не является замкнутым множеством.
В этом случае задача может не иметь решения.
‘Такая
конечномерном
трудность,
случае,
естественно,
когда. ищется
не
исключается
экстремум
функции
и
в
мно-
гих переменных. Но в бесконечномерном случае, когда область
определения функционала есть бесконечномерное линейное пространство, условис замкнутости множества провсрить гораздо
труднсс.
Впрочем,
вариационная задача, можст
нс иметь решс-
ния даже в том случае, когда область определения функционала,
является замкнутым
рованном
множеством.
пространстве
не
для
В бесконечномерном
всякого
замкнутого
норми-
ограничен-
ного множества можно утверждать, что функция, непрерывная
на этом множестве, ограничена и достигает максимального и
минимального значений.
Рассмотрим вариационную задачу
ь
Лу =
[у+
а
(и)?ах > ит
42
1. ОСНОВНЫЕ
в классе
(а, 6),
функций,
дважды
непрерывных
на
ПОНЯТИЯ
непрерывно
[а,В],
дифференцируемых
имеющих
в концевых
на
точках
а
и 6 нулевые значения (у(а) = у(5) =0) и вертикальную касательную (у’(а) =у'Ъ) = «). Это задача поиска кратчайшего
пути из точки
(а, 0) в точку
(65, 0) при условии,
что в конпе-
вых точках пути задано вертикальное направление движения.
На рис.
1.6 видно,
что функцию
из рассматриваемого
класса,
можно выбрать так, что длина ее графика, будет сколь угодно
мало отличаться от длины отрезка оси Ох, соединяющего точки (а, 0) и (Ъ, 0), который имеет наименьшую
длину среди всех
кривых, соединяющих его концы. Однако сам отрезок являстся графиком функции, тождественно равной нулю, которая
не относится к множеству допустимых функций. Таким образ
зом, функционал не достигает минимума на рассматриваемом
множестве функций.
У
М
[6]
УВ]
а
|2]
Рис.
1.6
В вариационном исчислении сушествованис решсния заданной задачи поиска экстремума, требует отдельного доказательства, и это составляет существенную трудность при решении
многих задач вариационного исчисления.
Как будет показано в 2, задача поиска стационарных точек
некоторого функционала сводится к решению дифферснциального уравнения или системы дифференциальных уравнений (в
зависимости
от рассматриваемого
функционала
гут быть как обыкновенные, так и в частных
Например, вариационная задача,
уравнения
производных).
ь
Лу =
Нельууа —ехы,
у(а)=у,
мо-
У) =
1.4. Некоторые замечания о задачах вариационного исчисления
при
некоторых
венного
предположениях
дифференциального
дополнительными
условиями
сводится
к
решению
43
обыкно-
уравнения
вида у” = ф(т,у,у) с
(а) = у,
9(5) = чь и к последу-
ющему анализу полученного решения. Задачу у" = ф(х, уу),
(а) = ца, у(5) = % в теории дифференциальных уравнений называют краевой [УПТ|.
Чтобы краевая задача, для обыкновенного
дифференциаль-
ного уравнения (ОДУ) п-го порядка была правильно поставлена, необходимо, чтобы количество краевых условий равнялось
порядку уравнения п, так как обшес решение ОДУ
п-го поряд-
ка
если
зависит
от
поставлена
п
произвольных
правильно,
решение
постоянных.
может
не
Даже
существовать,
задача,
а
если
существует, то может быть не единственным.
Пример
1.8. Рассмотрим краевую задачу
у'+у=0,
(а) = у
Общее
решение
а<т<ь,
(1.22)
5) =.
дифференциального
уравнения
в этой зада-
че имеет вид
(т) = Сусозя + Созшх.
Краевые условия приводят к следующей системе линейных
алгебраических уравнений (СЛАУ) относительно неизвестных
постоянных
Сл и (5:
Стсоза - Созта = уда,
Ст со8 6+ Ст
Определитель матрицы этой СЛАУ
соза
зша
6050
эшЬ
.
= 9.
равен:
= созазшь — соябяша = зщ (6 — а).
Система совместна, и имеет единственное решение, если 6 — а 52
2 пт,
ПЕ М.
44
1. ОСНОВНЫЕ
Пусть
ПОНЯТИЯ
6 -а = т. Тогда получаем систему
Су соза - Созша = ча,
Стсоз(а + п) + Созщ(а-+ ля) = чь.
В силу формул приведения для тригонометрических
второе уравнение системы эквивалентно уравнению
функций
— Ст соза — Созта = уь,
и мы видим, что решение
СЛАУ
существует лишь при у = —5.
Если это равенство верно, СЛАУ будет иметь бесконечно много
решений, так как второс уравнение системы будет следовать из
первого, а первое уравнение имеет бесконечно много решений
вида С1 = у. с0за + фзта, Со = уззша — соза, Ё Е В.
Вопросы
1.1.
Найдите
и задачи
расстоянис
между
у2(2) = 23 по норме пространства;
1.2. Покажите,
функциями
а) С[0,1];
у1(57) = 2?
6) С'
и
0,1.
что функционал
Пу] =
|
Г(у-у) ах,
определенный на С\[0,1] с нормой |||сл, является непрерывным
на функции 1/0(4) = 43.
1.3. Покажите,
что функционал
Пу = ] (у)? ат,
0
определенный
случае нормы
нормы || [[сл.
на С"[0,1|], разрывен на функции (5) =0 в
||||с, но непрерывен на этой функции в случае
Вопросы и задачи
45
1.4. Функционал
_ ] аа,
0
определенный
на
С"[0,1],
исследуйте
функции 1/0 (1) =0 по норме:
1.5. Покажите,
на
а) |‘|с;
непрерывность
на
6) |||сл:
что функционал
1
— Дунае,
О
определенный на пространстве СО, 1], непрерывен на функции
%0(2) = 2? по норме |||
1.6. Докажите, что любой линейный непрерывный функпионал в нормированном пространстве является дифференцируемым.
Запишите
его дифференциал.
1.7. Докажите, что функционал „Л[у -1 1)? 4т, определенный
в С[а,6], является всюду дифференцируемым.
Запишите его
дифференциал.
1.8. Проверьте, являются ли дифференцируемыми следующие функционалы: а) /[у| = у(а) в С[а,6]: 6) Лу] = у(а) в
Св, 6]; в) Ли = у@) в С[а,5;
г) Ли = УТУ (а) в Св, 5]
1.9. Найдите первую вариацию функционала,
определенно-
го на нормированном пространстве непрерывно дифференцируемых Функиший:
1
и
М1-+2 ах;
6) ПУ = Геза
1
п
в) Пу| = Д’зшуаы
р
г)
= (0) +
[(ви+ (и) аз.
р
2.
ВАРИАЦПИОННЫЕ
ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
2.1. Простейшая задача
вариационного исчисления
Рассмотрим задачу об экстремуме
функционала
[р]
ли= ] аул) ас,
(2.1)
определенного на множестве функций у(1) © С"[а, |, удовлетворяющих условиям
(а) = у,
Предполагасм,
жды
что
непрерывно
интегрант
9(6) = у2.
(2.2)
функционала
дифференцирусмая
}(х,уу’)
функция
трсх
—
два-
перемен-
ных.
Сформулированную задачу называют простейшей задачей вариационного исчисления.
Именно на этой задаче
отрабатывались основные приемы данной дисциплины.
Первую вариацию функционала (2.1) при указанных услови-
ях на функцию }(1,у,у’) можно записать в виде (1.16):
[и
9.у,6у] = ] (бу
Либу) ах.
(2.3)
а
Здесь
у(т)
бу Е Са,
и ду’ —
и ее производная.
При
допустимая
этом
У
вариация
функции
= бу, = 0, поскольку
2.1. Простейшая задача вариационного исчисления
условия
(2.2)
фиксируют
значения
допустимых
концах отрезка и, значит, вариация
должна иметь нулевое значение.
Теорема
2.1.
Для
того чтобы
функции
функция
функций
47
на
в этих точках
у,(т)
доставляла,
слабый экстремум функционалу (2.1), необходимо, чтобы она,
удовлетворяла уравнению
а
т И-М
=0.
(2.4)
< Используя необходимое условие экстремума для дифференцируемого функиионала (см. теорему 1.2) и вид (2.3) первой
вариации функционала, получаем
ь
] (Ибу+ бу)
=0.
а
Это соотношение верно для любой допустимой вариации
бу, т.е. для функции бу с Са, ], удовлетворяющей краевым
условиям ду(а) = 6у(5) =0.
В частности, оно верно для любой бесконсчно дифференцирусмой функции, удовлетворяющей
тем же краевым условиям.
Поэтому, согласно лемме ДюбуаРеймона, для любого т Е [а, 8] выполняется равенство (2.4).
Согласно замечанию 1.3, уравнение (2.4} дает необходимое
условие и для сильного экстремума функционала (2.1). Это
уравнснис называют уравнением Эйлера для функционала
(2.1), а гладкие решения этого уравнения — экстремалями
функционала.
В дальнейшем для упрошения изложения мы
под экстремалью будем понимать не только функцию 9(т),
являющуюся решением уравнения Эйлера, но и график этой
функции, т.е. кривую на плоскости хОу, которая описывается
уравнением у = у(5).
"Так как условие (2.4) является необходимым, точки экстремума функционала, следует искать среди экстремалей этого
48
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
функционала. Это является обобщением ситуации для дифференцируемых функций одного переменного, точки экстремума
которых
находятся
Зачастую
среди их стационарных
уравнение
Эйлера, способно
точек
[1].
дать исчерпывающий
ответ на поставленную задачу об экстремуме функционала. Если из содержательного смысла задачи вытекает, что задача
имсет
решение,
а функционал
удовлетворяющую краевым
дет решением задачи.
Пример
имсет
лишь
условиям,
одну
экстремаль,
то эта экстремаль
и бу-
2.1. Найдем экстремали функционала,
2
ЛИ = [еб
= зы) а
0
удовлетворяющие красвым условиям 1/(0) = 4, у(2} = 6.
Интегрант (т, у, у) = 2(у’)3 — Зу(/)? рассматриваемого
функционала, является дважды непрерывно дифференцируемой
функцисй своих аргументов (даже бесконечно дифференцируемой). Поэтому можно применить теорему 2.1. Поскольку
{, =За(у’)? —буу,
Н=-30)?,
уравненис Эйлера для данного функционала имест вид бху'у" —
— бу" =0, или у"(ту'— у) =0. Это дифференциальное уравнсние второго порядка, которое распадается на два уравнения
1] =Ои 1’ -у=0. Общее решение первого из них имеет вид
у = С1х - С, а общес решение второго —
только второго семейства у = Ст входят
у=Сх. Все функции
в первое семейство.
Поэтому все экстремали рассматриваемого функционала, имеют вид у = Слх+ С>.
Постоянные интегрирования
С-+ и Со находим из краевых
условий. Полагая х =Оих=2, приходим к системе линейных
алгебраических уравнсний относительно Су, Со:
С:
0-
Ст: 2+
С
=4,
(2 = 6.
2.1. Простейшая задача, вариационного исчисления
49
Из этой системы находим С = 1, С5 =4. Итак, поставленным
краевым условиям удовлетворяет лишь одна экстремаль рассматриваемого
Предполагая,
цируемой,
функции,
функционала:
у=х+4.
3#
что функция (2) является дважды дифферен-
и используя
правило
преобразуем
дифференцирования
первое слагаемое
сложной
в левой части
(2.4):
ПЛМ.
а
С учетом этого запишем
формс:
п
. ууу
Я
+.
уравнение
п
ууу
1
+.
Эйлера
п
узо
Л,
#_
=
(2.4) в следующей
0.
Видно, что если выполняется неравенство Ли у = 0, то уравнение Эйлера, представляет собой обыкновенное дифференпиальное уравнение (ОДУ) второго порядка, удовлетворяющее
теореме Коши сушествования и единственности решения ОДУ.
‚
=0 оно уже не является уравнением второго порядка; оно либо ОДУ первого порядка, либо алгебраическое, т.е.
не содержащее производных неизвестной функции. Повторим,
При и,
что
эти
умозаключения
основаны
на
предположении,
что
решс-
ния уравнения Эйлера дважды дифферснцирусмы. Возникает
вопрос: при каких условиях на функцию } это предположение
выполняется?
Теорема 2.2. Пусть у(х) — решение уравнения (2.4). Если
интегрант {(1,у,у’) имеет непрерывные
до
второго
порядка
включительно,
хОу, в которых Ри 0,
вторую производную.
#
функция
то
во
%(5)
частные производные
всех
точках
имеет
плоскости
непрерывную
Уравнение Эйлера далеко нс всегда интогрирустся в квадратурах. Поэтому важно выявить такис случаи, когда интегри-
рование в квадратурах возможно.
НИХ.
Рассмотрим некоторые из
50
2. ЗАДАЧИ
1. Интегрант
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
не зависит от у’. В этом случас 1 =0и
уравнение Эйлера имеет вид },(1,у) = 0, т.е. является алгебра-
ическим уравнением относительно неизвестной функции у(:).
Решения этого уравнения, т.е. экстремали функционала, могут
и не удовлетворять поставленным краевым условиям.
Пример
2.2. Найдем экстремали функционала,
ь
Лу = [7 4х,
[2
удовлетворяющие краевым условиям (а) = м, у(6) = у.
Уравнение Эйлера 3? = 0 рассматриваемого функционала,
имеет
единственное
решение
у(2) = 0.
Если хотя
бы одно из
чисел 1 и у> отлично от нуля, то в множестве Са, функционал не имеет экстремалей, удовлетворяющих поставленным
краевым условиям.
2. Интегрант линейно зависит от у’. Этот случай,
включающий в себя и предыдущий, охватывает те функционалы, интегранты которых удовлетворяют условию Л, и = 0.
Такие функционалы называют вырожденными. Если
Итрьу) = Ржу) +О(туу,
то уравнение Эйлера принимает вид
де =0
49
Раскрывая
сложной
производную
функции,
9..0.
Это уравнение,
/
а@
р
получаем
о!
по
правилу
(©), + Фу
дифференцирования
— Р, — Оу
=0,
или
как и в предыдущем случае, алгебраическое.
Его решения могут не удовлетворять краевым условиям. Отметим, что если выражение Рах - ОФау представляет собой полный
2.1. Простейшая задача вариационного исчисления
51
дифференциал, то уравнение Г, — (', =0 является тождеством
относительно # и у. В этом случае любая функция у(2) Е С[а,6]
является решением уравнения Р, — ()', = 0 и, следовательно, экстремалью
функционала.
Пример
2.3.
Найдем
экстремали
функционала,
[2]
] (У -иу) ат,
а
удовлетворяющие красвым условиям у(а) = у, (5) = у.
Уравнение Эйлера
единственное решение
—2у = 0 данного функционала
у(2) = 0.
Если одно из чисел
ненулевое, экстремалей, удовлетворяющих
условиям, нет.
имеет
у1, 12
заданным краевым
3. Интегрант зависит только от у’. В этом случае он
имеет вид /(у’), а уравнение Эйлера, для функционала, —
4
1
—
у
ах
Нетрудно
порядка
нение
увидеть,
[УПТ]
что
это
Ли = С.
относительно
у.
=0.
уравнение
Мы
Все
„
допускает
понижение
получили алгобраическос
его
решения
можно
записать
уравв
виде
/ = Си, где С: — произвольная постоянная. Таким образом,
экстремалями функционала с интегрантом рассматриваемого
типа. является семейство линейных функций у = С1х + С2 с произвольными
Пример
постоянными
Су
и (5.
2.4. Найдем экстремали функционала,
ь
['
> у)
ат,
а
удовлетворяющие
краевым условиям у(а) = 1, (6) = у.
52
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
Так как интегрант функционала зависит только от у’, то решениями уравнения Эйлера, для этой задачи являются линейные
функции
ныс).
(5) = С1х + С2
(Су
и С> —
произвольные
постоян-
Два красвых условия позволяют выбрать сдинственную
функцию
Иа.
—а
#
У
4. Интегрант не зависит от у. Этот случай включает
в себя предыдущий. Интегрант имеет вид {(т,у’), а уравнение
Эйлера сводится к следующему:
[
й
деи
и оно, как и выше,
м
ВУ)
=0,
допускает понижение
порядка:
№, = С1.
Последнее уравнение ссть ОДУ первого порядка, или алгебраическое уравнение (например, в предыдущем случае).
Пример
2.5.
Найдем
экстремали
функционала,
ь
Лу = ] (У?
2) ат,
а
удовлетворяющие краевым условиям (а) = ул, 9(6) = у.
Уравнение Эйлера,
оу
ат
+25) =0
этого функционала после понижения порядка сводится к уразнению у'’- х = С1. Решая его, получаем семейство экстремалей
(т) = С +05 — 12/2. Постоянные С! и С> однозначно нахо-
дятся из краевых условий при любых 1 и у.
5. Интегрант не зависит явно от т. В этом случае
он имеет вид /(у,’), а уравнение Эйлера при дополнительном
2.1. Простейшая задача варианционного исчисления
предположении,
следующему:
что
Ли
20
(см.
теорему
2.2)
53
сводится
к
Лии Е Лии - М =0.
Умножив сго на у’, получим
4
Таким образом,
понижение
Гр!
и в этом случае уравнение
Эйлера, допускает
порядка:
Гр!
УЛ,
-Л=СЯ.
Пример
2.6. Найдем экстремали функционала,
[2
Лу = ] (ууу)ат.
[о
Уравнснис Эйлера после понижения порядка сведется к
уравнению первого порядка у’(у +2’) — уу’ — у? = С, или
(1)? =С. Отсюда у’ = УС = (1, и экстремалями рассматри-
ваемого функционала будут линейные функции у(1) = Ст + Со.
Пример 2.7. Найдем экстремали функционала
И. Бернулли о брахистотроне (см. пример 1.2):
в задаче
Ь
ы
|
у”
.
ба
тт
с —
иии
‚1
9 ( 0) )
=0.
;
(5)(5)
=
Ув
>0.
В данном случае интегрант не зависит от 5 и является дважды непрерывно дифферснцирусмой функцисй в области у > 0
на плоскости хОу. В этой области можно использовать тсорсму
2.1, и мы заключаем, что уравнение Эйлера для рассматриваемого функционала допускает понижение порядка:
М
У29у
у
Убит?
-@
54
2. ЗАДАЧИ С ФИКСИРГОВАННЫМИ
ГРАНИЦАМИ
Отсюда находим
1
к
У29 Му + (у)?
Возводя
в квадрат и учитывая
получаем
(/.
константу
29 в постоянной
(С,
|
уу”)
= С, > 0.
Мы получили уравнение первого порядка, не разрешенное
относительно производной [УП].
Его удобно решать методом введения параметра. Положим у’ = сер. Тогда 1+”? =
= 1 Из?
и
= Сузш? $.
(2.5)
Мы выразили переменное у через параметр.
Далее, равенство у’ = сё? означает, что 4х = 1 фау. Подставляем в это равенство выражение 4у через @ф, которое
получается дифференцированием (2.5):
ат =}.
Си - 21.
с08
$
= 2С1 зи фа.
Интегрируя, выразим переменное х через параметр:
1 = С: (24 — т 24) + С,
где
С
=
Сч/2
>0.
Заменив параметр на 9 = 24 и объединив выражения хи
у через новый параметр, получим параметрические уравнения
циклоид
[. = С — 819) + С,
у= С1(1- с089).
Эти уравнения описывают
области у > 0. Посмотрим, как
функций выделить те, которые
виям (0) =0, у(5) = ув. Но при
все экстремали функционала, в
из всего семейства указанных
удовлетворяют красвым услоэтом отметим, что точка (0, 0)
2.1. Простейшая задача вариационного исчисления
55
не входит в рассматриваемую область у > 0 на плоскости хОу
и выделенные функции, строго говоря, нельзя считать экстре-
малями на всем отрезке [0, 6].
Условие (0) =0 равносильно двум условиям:
2(9)=0,
у(9} =0. Из второго получаем 9 = 2ил, пе №, а из первого —
2птС1 + С5 = 0.
Подставляя в параметрические уравнения
вместо
С5 найденное
выражение,
=
получаем
01 (9 -2л) — 9),
и= С
— с089).
Заменяем параметр 9 — 2ил = ©9 и учитываем
тригонометрических функций:
+ =С
периодичность
(9-0),
-
у= С.
(2.6)
(1- со8 9),
где 9 = 0 соответствует начальной точке х = 0,
учесть второе краевое условие:
у=0. Остастся
ь= С! (9 —зш9),
-
ув = СЦ
(2.7)
- с08 6).
Делим первое уравнение на второе (в предположении
избавляясь от неизвестной постоянной С\:
9—зшо
ее
1- с059
Ь
—щ=АЪ0.
ув
20
2.
(2.8)
Отметим, что для циклоид из рассматриваемого
точки, соответствующие значениям параметра, © =
ются точками возврата. Но экстремали не должны
таких точек.
Поэтому в нашем случае параметр
меняться
в пределах
интервала
ув 7 0),
(0, 27).
Можно
семейства
2пл, являсодержать
9 должен
показать,
что
56
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
функция
=
зш О
Ункция
у —
— с0о89
на
этом
интервале
ГРАНИЦАМИ
монотонно
возрастает.
Значит, уравнение (2.8) на этом интервале имеет единственное
решение 9%. Это решение позволяет определить постоянную
Ст по формуле С: = а.
Найденное значение [© выделя—
08
Оо
ет из семейства экстремалей (2.6) ту единственную экстремаль,
которая удовлетворяет краевым условиям.
Пример
2.8. Рассмотрим вариационную задачу
|
=
[7У
+у?) ах >ехш,
у(0=ь
у
=е.
0
Уравнение Эйлера для функционала в поставленной задаче
имеет вид 2” —2у =0. Это однородное линейное дифференциальное уравнение с постоянными коэффициентами, решая
которое, находим единственную экстремаль, удовлетворяющую
краевым условиям: у(1) = е”.
Убедимся, что найденная экстремаль является точкой локального экстремума функционала, и тсм самым даст решение
вариационной задачи. Вычислим приращение функционала, в
точке у = е” для произвольной допустимой вариации 6 в нор-
мированном пространстве С" [а,6], которая, напомним, должна
удовлетворять условиям ду(0) = ду(1) =0:
1
дл
Личай- Ли= | (иевет иди
уз) ат
0
1
-
/( 2убу+ (6) +26
+ (5?) ат =
0
1
= ев
0
+ (бу)? + 2е°бу' + (у')?) ах.
2.2. Функционалы
Так как
от нескольких функций
1
57
1
ебу
4т = (2676), _ [ебу
0
0
то
1
Ал ] (ви)? + (6?) 4 >0,
р
ссли
||69|с1 220.
Значит,
на функции
у(1) = 7
заданный
функционал достигает строгого слабого минимума.
2.2. Функционалы
от
нескольких
Пусть интегрант функционала зависит
переменного 1, т.е. функционал имеет вид
функций
от двух
функций
ь
Лу,
2]
=
[Каз
ул,
2) ах,
(2.9)
а
где } — дважды непрерывно дифференцируемая функция пяти переменных. В качестве области определения функционала
рассмотрим пары функций 1 и 2 из класса С[а,6], удовлетворяющие
красвым
у(а) =уп,
условиям
(0) =у2,
у2(а)=ул,
(2.10)
420) =у2.
Допустимые вариации ду1 и ду2 для функций у1 и у2 должны
быть класса, С[а,6] и удовлетворять краевым условиям ди (а) =
= 02(а) = д41(6) = 9у2(6) =0, так как допустльмые функции
(2) и у2(2) имеют на концах отрезка [а,6] фиксированные
значения.
Для
произвольных
допустимых
вариаций
ду
и д
положим
(от, са) = Л
+ олд, у2 + а2бу?].
Очевидно, что если пара функций 1 и /2 доставляет экстремум
функционалу [1,2], то функция ф(а1, 02) двух переменных
58
2. ЗАДАЧИ С ФИКСИРГОВАННЫМИ
ГРАНИЦАМИ
имеет экстремум в точке (0, 0). В этом случае должны выполняться необходимые условия экстремума:
92
_
дот
=
о1=а2=0
даю
20.
о =@2=0
Используя формулу Лейбница дифференцирования
ленного интеграла по параметру [УП|, получаем
опреде-
6
9ф
:
дол
]
/
и
= )| (убил,
ИЯ
итби) ат =0,
|| —-аь-о
д
|
=
ф
да2
-/
он=а2=0
/
р
(
5042
+ 1.92
} ах =0.
ЕР
)
0.
у
м
ый
м
1
ху
—
Эти соотношения выполняются в том числе и для произвольных бесконечно дифференцируемых функций бл и д с
нулевыми
Реймона,
ма
значениями
получасм
в точках
следующие
а и 6.
Согласно
необходимые
лемме
условия
Дюбуа-
экстрему-
функционала:
а
Ли
м
Ч
ИВ
41“ 9
92
Чт"
—
0,
(2.11)
0
.
Эти необходимые условия экстремума функционала нетрудно обобщить на случай интсгранта, зависяшего от я функций.
Теорема
2.3. Если функционал
6
Лул,--
4]
—
А
(2.12)
а
где { — дважды непрерывно дифференцирусмая функция, достигаст экстремума на системе функций у1, ..., в Е С'[а, 6], то
2.2. Функционалы
от нескольких функций
59
эта система функций являстся решенисм системы дифференциальных уравнений
а
4х
.
=Ьи.
№ -/, =0,
(2.13).
#
Любое гладкое решение системы уравнений (2.13) (системы уравнений Эйлера) называют экстремалями функционала (2.12). Как и выше, термином „экстремаль“ мы будем
называть не только систему функций у (1), ..., У.(1), являющуюся решением системы уравнений Эйлера, но и кривую в ЕТ,
которая описывается уравнениями 1 =у1(х), ...,
=
(т)
(т.е. график вектор-функции).
Пример
2.9. Найдем экстремали функционала,
$
Лут,у2] = Геи у — А + (91) - (45) 4х.
а
В соответствии
с теоремой
2.3 записываем
систему уравне-
ний Эйлера:
21 — 25 5 4 = 0,
Аи
Из второго уравнения находим
выражение для 1 в первое:
у +2 +
(2.14)
= 0.
у! = —у
и подставлясм
это
=0.
Это однородное линейное дифференциальное уравнение с постоянными коэффициентами. Его общее решение имеет вид
у2(%) = Сузшх + Сотзшх + Сзсозх - Ст созт.
(2.15)
Значит,
(5) = —(С1- Сузшх + (205 -— Сз) совх —
— Сотзшт — Сотсовт.
(2.16)
Соотношения (2.15) и (2.16) описывают все экстремали рассматриваемого функционала.
60
2. ЗАДАЧИ С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
2.3. Функционалы
с производными высшего порядка
Пусть функция /(%,уу,у”,..., у)
цируема п - 2 раза.
Рассмотрим
непрерывно дифферен-
функщиюнал
ь
и = пельу лу
(2.17)
[22
на множестве
вым
функций
у(1) Е С"[а.6], удовлетворяющих
крае-
условиям
р
[и
о,
=
(а)
1/0.
И
Ч)
= у,
=
=уи,
УЕ
‚у | И
4... У
4+
(а)
—
®—1;}
ин-т;
риа.
(2.18)
В этом случае допустимой вариацией является любая функция дбуЕ С"[а,6], удовлетворяющая
однородным краевым усло-
виям
бу(а) =0,
да) =0,
....
ди"
(6) =0,
6/06)=0,
..,
ООО.
Пусть
Лу].
функция
у(%)
доставляет
(а) =0;
экстремум
19)
|
функционалу
Выбрав произвольно допустимую вариацию ду и зафикси-
ровав ее, рассмотрим
функцию
ф(а) = Лу+абу =
|
= ег
+ абу,у’ Набу у"
оду",... у + аду?)4,
а
где ду*) = (6%)
—
К-я производная
вариации
ду.
Функция
(а) в точке а = 0 имеет экстремум, и поскольку она дифференцирусма в этой точке, то ф'’(а) = 0 при а = 0 [1]. Но
ь
аи
| Иеитавьи
а
+абузу" оду"... у”) + абу")ф
2.3. Функционалы
с производными высшего
где частные производные
вычисляются в точке
функции
} под
порядка
61
интегралом
справа,
(2, у(2) + аби), у’(г)
+ абу"(в), „.-, У" (е) + аду (2).
Поэтому
ь
(0) = ] (лби+ Либу +...+ Пубу
а = 0,
(2.20)
а
где частные производные функции } вычисляются в точке
(=, у(2), у'(), у" (), ... "(2
Предположим,
что у(5) Е С?"[а,В].
Тогда,
используя
интегри-
рование по частям и краевые условия, получаем
И
[+ бу «=
| (тубы,
а
ь
|
ф
(=
.
Л} вуз,
ь
льву
ъ
аз = (-1" = -. Ро } баз.
4
Подставляем полученные соотношения в (2.20):
Г
а
1!
(и
1
Аи
“
4т"*
4
НИ
1
п
+...+
(1)
Ш
4
1
мт)
д
ут
=
0.
62
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
Это равенство верно, в частности, для любой бесконечно диф-
ференцируемой функции ду(1) с нулевыми значениями на концах отрезка [а, 5]. Поэтому,
4
9)
и-
диф
./
+
И
аа
"/
согласно демме Лагранжа,
+.
т
+0
а {2
в!
ати)
—
=0,
откуда, меняя порядок слагаемых, получаем
(пр
+
ем
ат"
+
дату
+
т
+ ол
+
=0.
(2.21)
Уравнение (2.21) называют уравнением Эйлера — Пуассона, а сго 2%, раз непрерывно дифференцируемые решения —
экстремалями
функционала
Ч].
Итак, доказано следующее утверждение.
Теорема 2.4. Если функционал [у] вида (2.17), определенный на множестве функций из С"[а,6], удовлетворяющих
краевым условиям (2.18), достигает экстремума на некоторой
функции (1) © С?"[а, 6], то эта функция является экстремалью
функционала Лу].
Замечание 2.1. Теорема 2.4 в частном случае 7 = 1 отличастся от доказанной рансс тсорсмы 2.1 тем, что на функцию
(<), на которой функционал достигает экстремума, накладывается дополнительное требование гладкости (1) Е С?[а,Ы.
Ослабления требований в теореме 2.1 удается достичь с помошью леммы Дюбуа-Реймона, которая в доказательстве теоремы
2.4 не используется.
Пример
2.10.
Найдем экстремали функционала,
ь
Ли = ето
— 223)ах.
2.4. Функционалы
от функции многих переменных
63
Записываем уравнение Эйлера, — Пуассона
2+2,
Это
неоднородное
постоянными
[УШ.
линейное
— 253 = 0.
дифференциальное
коэффициентами
и специальной
уравнение
правой
с
частью
Решая его, получаем
у(х) = 29+ Се’ + Се
+ (Сзе?!? + Сие?) с08 У, +
+ (Сьет!? + Све_*/?) эт У.
Каждая функция этого семейства
ного функционала.
является
экстремалью
дан-
2.4. Функционалы от
функций многих переменных
Перейдем
множествах
пример,
к обсуждению
функций
множество
многих
М
функционалов,
определенных
на
переменных.
Рассмотрим,
нал
функций
2(т,у)
от
двух
переменных,
которые дважды непрерывно дифференцируемы в некоторой
области С С Е. Исследуем задачу об экстремуме функционала
И = ] ] Керни )еау,
(2.22)
р
где Г) — область, удовлетворяющая условию (Родос
дважды
ментов.
непрерывно
В
качестве
дифференцируемая
области
определения
функция
этого
своих
С; } —
аргу-
функционала,
возьмем подмножество тех функций из М, которые на границе
области ВР имеют заданное значение:
2(т,у) эв= ф(т,у).
(2.23)
64
2. ЗАДАЧИ С ФИКСИРОВАННЫМИ
Допустимьми
92(х,у) е С?(@),
варцациями
в этом
обращающиеся
ГРАНИЦАМИ
случае
будут
функции
в нуль на границе
ОР
обла-
сти Л.
Как и для функционала (2.1), необходимое
мума можно записать в форме
условие экстре-
5.1[2,92] = 0.
В
данном
случае
первая
(2.24)
вариация
6.1 [2,02] = я
+ ад2]
а=0
функционала
записывается
в форме
52.62] = ] ] (1162 + Идр+ 1164) аеау,
р
где р и
4 обозначают соответственно 2/ и Е ‚ Так как
Я
9
=) = ве
бр
5
9
=) = ве
Дб
то
]
(Лрбр- 1104) атау =
=
(1,2) +
+
Используя
формулу Грина
[ао
‚52)))) Чеву- (5на
-
ое
получаем
912
“блага.
2.4. Функционалы от функции многих переменных
65
так как 92 = 0 на границе ОР) области ДР в силу фиксированных
значений функции 2(1,у). Значит,
И
(2+
+ да) 4тау =- (о,
бр
1
бодефу
и нсобходимос условис экстремума принимаст вид
д
д
И (г _ ор _ ати
Поскольку
первый
сомножитель
под
=0
знаком
интеграла,
не-
прерывен, а вариация произвольна, то, согласно замечанию 1.4,
функция 2(1,у) является решением дифференциального уравнения в частных
производных
0
Оу,
и
РН
2.25
(2.25
=
которое называют уравнением Остроградского,
гладкое решение этого уравнения — экстремалью
онала (2.22).
Пример 2.11.
Напишем
функционала Дирихле
уравнение
1-3] [О
а любое
функци-
Остроградского
для
„^) ах ау.
В этом случае /(7,у,2,0,4) =р? +9”. Поэтому Л=2р=22,,
Д=24=2л,, |. =0, и мы приходим к уравнению Лапласа
922 + 92
92
02
Таким образом, экстремалями функционала Дирихле являются
гармонические в области р функции [ХП|.
66
2. ЗАДАЧИ С ФИКСИРОВАННЫМИ
2.5. Канонический
ГРАНИПАМИ
вид уравнении
Эйлера
Функционалу
ь
Ли | Чему),
(2.26)
а
где
9(1)
= (%1(т), ..., %(1))
функция
}
дважды
система
уравнений
—
гладкая
непрерывно
вектор-функция,
дифференцируема,
а
отвечает
Эйлера
а
и-
=
1=Гю.
(2.27)
Эта система, вообще говоря, представляет собой систему обыкновенных дифференциальных уравнений (ОДУ) второго порядка. Такую систему можно свести к системе ОДУ первого
порядка введением дополнительных переменных.
Введем новые переменные 2; =1/, {=Т1,
и. Тогда, Л, ‚= зи
мы получаем следующую систему 2% уравнений первого порядка, эквивалентную исходной системе (2.27):
а
Е
и
=0,
8=1,
т
—
7;
(2.28)
ау:
Чт
=2,
1=Ьп
Полученная система ОДУ не является нормальной, и поэтому с ней неудобно работать. Пусть
реф,
ЕТ п.
(2.29)
Определитель матрицы Гессе (матрицы частных производных
второго порядка) интегранта } по переменным у" совпадает с
якобианом
Бр,
... „Ри,
В,
2.5. Канонический вид уравнений Эйлера
67
Если этот определитель отличен от нуля, то, согласно теореме
об обратной функции [У], система уравнений р; = Д, &=1Т. и,
определяет совокупность старых переменных 1, как функцию
новых ри
Рассмотрим функцию
я
Н(т,у,р)
=
—У
(ти,
В (т, у,р))
+ У`вит,у,р)рь,
8=1
(2.31)
где В = (В/, ..., №). Эту функцию называют фунюцией Гамильтона данного функционала (2.26), а переменные х, у, р,
связанные со старыми переменными х, у, у’ соотношениями
(2.29) или (2.30), — каноническими
переменными
данного
функционала.
Из определения функции Гамильтона следует, что
уд
ан =
о
+ Ура
У а =
1=1
4=1
=
уда
п.
3—1
4=1
т
- Учи - Уи
п.
Стаи
У лире.
8=1
1=1
(2.32)
В силу равенств (2.29) третье и четвертое слагаемые в правой
части равенства (2.32) взаимно уничтожаются. Поэтому
п
я
11
4—1
АН =-Н.4-У`р,аи+ мар.
У
Значит,
для частных
переменным
производных
х, у, р справедливы
}
Н.
!
!
1
1
=-Ль,
Ни»
=-Л
Нь,
,
О
О
Отсюда
}, =-Н,,
И
и=Нь,.РИ
обозначениям, }, = Л, =рид
лучаем следующую
функции
следующие
й
нормальную
,
Так
=,
Ё
как,
(2.33)
Гамильтона,
по сс
равенства:
1
=.
-.
эс
согласно
введенным
из системы ОДУ (2.28) по-
систему
ОДУ,
эквивалентную
68
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
системе уравнений Эйлера (2.27):
4" ЭН
ат
ты
др;
`
ЧР:
_ ЭН
а
д’
О
(2.34)
Ты
Систему (2.34) называют канонической
формой
уравне-
ний Эйлера функционала (2.26).
Как известно, первым интегралом системы ОДУ называл
ют функцию, сохраняющую постоянное значение вдоль каждой
интегральной кривой этой системы. Для того чтобы данная
гладкая функция была первым интсгралом системы ОДУ, нсобходимо и достаточно,
чтобы полная производная этой функции
в силу системы ОДУ тождественно равнялась нулю [У]. В
некоторых частных случаях можно указать первые интегралы
системы (2.34), а значит, и системы (2.28).
Пусть интегрант / = (у, у’) не зависит от х явно. Тогда и
функция
Гамильтона, не зависит
у
от т явно.
С
‚ ай
аН
и т +,
ат _ он,
1=1
ЭН
так как =
и Н,
_-
=0.
Подставляя
ия
из системы
Значит,
С,
(2.35)
,
выражения
для производных
Ну,
(2.34) в соотношение
(2.35), получим,
что
АН/а4т =0. Значит, вдоль каждой экстремали Н постоянна.
Таким образом, если интегрант явно не зависит от независимого персмсенного
х, то функция
Гамильтона
являстся
первым
интегралом системы уравнений Эйлера.
Замечание
2.2. В общем случае верно тождество
АН
ах
ЭН
д '
где слева, стоит полная производная функции Гамильтона, в силу
системы (2.34).
Вопросы и задачи
69
Теперь поставим вопрос о том, при каких условиях данная
функция Ф(у.р), не зависящая явно от х, является первым
интегралом
системы
(2.34).
Вычислим
функции Ф по х в силу системы
4
(ЧИ,
и
)
полную
производную
(2.34):
41)-7
Хо
@ Н.-ФН,
р).
Выражение
Ф.Н]
= У
(ФН,
= Ф Н,,)
1=1
называют
зом,
скобкой
Пуассона
функций
Ф и Н.
Таким обра-
4Ф =, Н]|,
-—
и мы доказали следующее утверждение.
Теорема 2.5. Дифференцируемая функция Ф(у,р) является первым интегралом системы (2.34) тогда и только тогда,
когда [Ф, Н] =0.
Вопросы
2.1. Найдите
ряющие
заданным
и задачи
все экстремали функционала
краевым
условиям:
Г[у|, удовлетво-
70
2. ЗАДАЧИ
С ФИКСИРОВАННЫМИ
1
О
ГРАНИЦАМИ
О
0
п/8
д) Пу]= | (16? + (и)? + 2у(5125 + 162) ) ат,
(0) =0,
0
(5) =
[2
е) Ду
(== зу
Е созу
и (2х и
тэ)
ат,
(1) = 0,
д/д
(5) =1
4
ж) ПИ = ] (вии) ак, 9) =
4)
5;
3) Ци]= | ((/)? тб’
2ту) ат, (0) =0, У) =и) Ци] = | у,
(0) =0, у) =2;
к Пи= | (ты) ы 00) =0, а) =>
0
2.2. Среди плоских кривых,
соединяющих
две точки (71, 1)
и (72, у2), найдите ту, которая при вращении вокруг оси Ох
образует поверхность наименьшей площади (см. пример 1.4).
2.3. Покажите,
что функционал
ь
Пи = [ (ред! Рады+ аду ат,
а
где р(2) Е Са,
|, а(х), т(2) Е С[а,6], не имеет экстремумов.
Вопросы и задачи
2.4.
Покажите,
что
для
всякого
дифференциального
нения у” =ф(т,у,у) с дважды непрерывно
мой правой частью ф(х,у,у’) можно найти
(ху, у’), что
ь
решения
этого
уравнения
урав-
дифференцирустакую функцию
будут
экстремалями
функционала | (т, у, у’) ат.
а
2.5. Найдите функции у (5), у2(2) Е С\[а, 8], на которых может достигаться экстремум заданного функционала при заданных
краевых
условиях:
п/2
а)
Пу]
= ] (и у> — лу)аж,
у1(0) =0,
у (п/2) =1,
й
у2(0) = 0, у2(л/2) = —
3
обор
Пу] =
+ лид
1
1
у1(3) = ш3 +1, (0) =0, у2(3) =0;
Ци] = И
+ (92) + Зи?) 4т,
(0) =0,
у (т/2) = , 42(0) =0, у2(л/2) =
Пу] = бы 42+ (42)°- (и) 4т,
о
(0) =0,
у (т/4) =1, 2(0) =0, у(л/4) = 1;
1
Путь] == [©
0
92(0) =Т, у2(1) = 1;
5+2)42,
(0) =1, и(1) =3/2,
72
2. ЗАДАЧИ С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
3
с) Прин] — [ое
+
+ зи),
(2)
= №13,
2
у1 (3) = 13, у2(2) = 12, у2(3) = 0.
2.6. Найдите все экстремали заданного
влетворяющис
заданным
красвым
функционала,
условиям:
1
а) ДИ= ] (1209
— ав, (0) = 0, 0) =Ьи®)=0
и/2)
= —1;
ь
в) И= [ (Ру 4е, 0) ви
0
у'(ь) =0
=0
удо-
Вопросы и задачи
ж) Пи = [| ("-
73
аь, 0) =) =) =0
0
(т) = у" (п) =зЬт, у (п) = пя
2.7. Напишите
уравнение
+1.
Остроградского
для
следующих
функционалов:
5-е речь рее
ь
л
7.
4х ау ал,
рсю.
2.8. Пусть функции Ф(х,у,р) и Н(х.у,р) таковы, что
Ф, 20, Н, 20. Докажите, что если Н — функция Гамильтона
вариационной задачи, то вдоль любой интегральной кривой
системы уравнений Эйлера выполняется равенство
4Ф
09$
ри = 5х + ®, Н|.
3. ВАРИАЦИОННЫЕ ЗАДАЧИ
С ПОДВИЖНЫМИ ГРАНИЦАМИ
Наряду с рассмотренными вариационными задачами, в которых допустимые функции были определены на фиксированном отрезке
[а, 6], причем концевые точки А(а, уд) и В(6, ув)
графика функции были закреплены, часто необходимо решать
и иные задачи, в которых экстремум функционала, заданного
интегралом, ищется среди функций, определенных на разных
промежутках, причем значения этих функций на концах промежутка не являются фиксированными. Для таких задач можно
использовать ранее полученные результаты (см. 2).
3.1. Задача
с подвижными
Рассмотрим задачу об экстремуме
концами
функционала
ь
Ли= ] Нау/) 4,
(81)
областью определения которого является класс функций С" [а,0].
Она отличается от задач, рассмотренных ранее, тем, что на д0пустимые функции нет ограниу
чений в виде краевых условий.
С гсомстричсской точки зрения
такая задача состоит в опрседслении кривой, являющейся графиком
функции,
расположены
прямых
Рис. 3.1
д =а,
на
концы
которой
вертикальных
х=Ь
(рис. 3.1)
и для которой соответствующее
3.1. Задача с подвижными концами
75
значение функционала являстся экстремальным.
задачу мы будем называть
движными концами.
варциационной
Такого рода
задачей
с
по-
Будем считать, что интегрант рассматриваемого функционала — дважды непрерывно дифференцирусемая функция.
Отметим, что допустимой вариацией в данном случае являстся
любая функция 6у(52) Е Са. 6]. Как и выше, используя формулу
Тейлора,
убеждаемся,
что первая
вариация
функционала
(3.1)
может быть представлена, следующим образом (см. (2.3) }:
ь
5.Ду, бу] = Дуб
Лии) 4х.
(3.2)
а
Если функция у(т) доставляет экстремум функционалу „/[у]|,
то первая вариация функционала на этой функции равна нулю
(см. теорему 1.2). Значит, для любой функции ду Е С[а,
ь
Отметим,
нечно
что это равенство
дифференцируемых
(3.3)
Л,ду') 4 =0.
[ (бу
верно
функций
в том
числе
с нулевыми
и для бескозначениями
на,
концах отрезка [а, 5]. Значит, согласно лемме Дюбуа-Реймона,
функция у(2} является решением уравнения Эйлера
ИМИ -Ь
(3.4)
т.е. является экстремалью рассматриваемого функционала,
Однако условие (3.3} в задаче с подвижными концами сильнее условий леммы Дюбуа-Реймона и позволяет получить дополнительные необходимые условия на функцию, доставляющую
экстремум функционалу. Если функционал „/[у]| не является вырожденным, т.е. его интегрант удовлетворяет условию Лии 2 0,
76
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ С ПОДВИЖНЫМИ
ГРАНИЦАМИ
то, согласно теореме 2.2, экстремаль является дважды непрерывно дифференцируемой функцией.
В этом случае в силу
правила интегрирования по частям
ь
б.Лу,бу] = ] (^ _ пели) диаес
|
ди] =
4
у
а
=
4
[(:- пли )ви г + и
бу(а).
бу) — Лу
7—0
(3.5)
х=а
Интеграл в правой части (3.5) на экстремали обращается
в
нуль. Поэтому, если у(х) доставляет экстремум функционалу
„у, то
би(а) = 0.
(3.6)
Ли
„5(в) — Л,
=
т=
Так как ду(а) и 9у(Ъ) в рассматриваемой задаче могут меняться
совершенно независимо, заключаем,
равносильно следующим двум:
РТ,
—
=
0,
что
равенство
= 0.
Ли
=
последнее
(3.7)
ф=а
Итак, точки экстремума функционала, /[у] в задаче с подвижными концами удовлетворяют уравнению Эйлера (3.4) и,
кроме того, двум дополнительным условиям (3.7), которые называют естественными
краевыми условиями.
Чтобы
найти эти точки, нужно среди решений уравнения Эйлера, (экстремалей функционала) выделить те, которые удовлетворяют
естественным краевым условиям.
Для функционала вида (3.1) можно поставить и „смешанную“ задачу, в которой, например, левый консц графика решсния — точка А(а, уд) — являстся фиксированным, а правый
конец
свободно
перемещается
вдоль
прямой
д =ф.
В
этом
случае есть одно краевое условие, сужающее множество допустимых функций. Допустимая вариация должна удовлетворять
3.1. Задача с подвижными концами
ТТ
условию бу(а) =0, так как все допустимые функции имеют одинаковое значение при 4 =а.
В равенстве (3.6) обнуляется одно
слагаемое, и это равенство сводится к первому условию (3.7).
Значит, среди экстремалей следует искать такие функции у(х),
которые удовлетворяют краевым условиям
(3.8)
у(а) — ул,
Пример 3.1. Найдем экстремали функционала в следующей вариационной задаче с правым подвижным концом:
п/4
=
] ((')? — у? +4усов) 45 > ехы,
(0) =0.
0
Данная постановка задачи означает, что среди экстремалей
функционала
нужно
выделить
те, которые
удовлетворяют
по-
ставленному краевому условию на левом конце и естественному
краевому условию на правом конце.
Уравнение
Эйлера
вид у" -у=2с05х.
рассматриваемого
функционала
имеет
Его общее решение можно записать сле-
дующим образом:
у = Стсозх + Созшх-
хзшх.
Из краевого условия на левом конце находим С1 =0.
правом конце естественное красвос условие имсест вид
(2)! д
=
__
ны 5
или '(п/4) =0.
Используя его, определяем
Ср=-1Таким образом, поставленным
творяст
сдинствонная
экстрсмаль
[т
постоянную
условиям
функционала,
=(2-1-3)*
у=
На
И
$5Ш$.
Со:
удовлс-
78
3. ВАРИАЦИОННЫЕ
Пример
вую,
3.2.
скатываясь
ЗАДАЧИ С ПОДВИЖНЫМИ
Найдем в вертикальной
по которой
[о]
без трения,
ГРАНИЦАМИ
плоскости хОу кри-
тяжелая
точка
до-
стигнст данной вортикальной
прямой за кратчайшее время.
Предполагаем, что начальное
х
положение
точки
—
начало
ко-
ординат, а вертикальная прямая задается уравнением 5 =6
В
(рис. 3.2).
Эту задачу можно трактовать как модификацию задачи
о брахистотроне (см. пример 2.7). Отличие состоит в том, что
правый конец искомой кривой пересекает прямую х = в некоторой, заранее не известной точке.
Рис.
3.2
Экстремалями рассматриваемого функционала является семейство циклоид (см. (2.6) ):
== С: (9 —зт@),
уи= Са
— с0809),
где значение 9 =0 параметра, соответствует начальной точке
=,
у=0.
Чтобы определить [© 1, воспользуемся вторым красвым усло-
вием (3.8):
Фи
Отсюда
!
У
&=Ь
находим,
29%
что
0.
1-+ (и')2
у'(6) =0,
т.е.
ЖЬ
правый
конец
искомой
кривой пересекает вертикальную прямую под прямым углом.
Так как, согласно правилу дифферснцирования функции,
заданной параметрически [1],
,
Уе _
5
Сзт®
С(-соз@)
3.2. Задача с подвижными
а
параметр
9
(0, 2),
то либо
ствует
левому
может
меняться
9 =0,
либо © =л.
концу
графика
границами
лишь
в
пределах
Первое
функции,
79
интервала,
значение
поэтому
для
соответправого
конца 9 =л.
Из условия 2(9} =5
получаем Сл =6, откуда
С1=В/л. Таким образом, необходимььи условиям экстремума
функционала удовлетворяет единственная функция, имеющая
параметрическое представление
х= 2 © — т 0),
п
и= =о
(1
с0з0).
Как и в примере 2.7, мы пока не можем утверждать, что найденная функция действительно доставляет рассматриваемому
функционалу наименьшее значение, т.е. движение по циклоиде
происходит за наименьшее время.
3.2, Задача
с подвижными
границами
Задача с подвижными концами, рассмотренная вышс, легко
обобщается.
Действительно, если вернуться на геометрическую точку зрения, то легко сформулировать варцационную
задачу, в которой концы графика функции лежат не на вертикальных прямых, а на произвольных кривых или вообще не
подчиняются каким-либо ограничениям, т.е. являются свободными. Особенность подобных задач состоит в том, что область
определения допустимых функций не фиксирована и меняется
от функции к функции. Такие задачи мы объединим общим
названием: вариационные задачи с подвижными границалми.
Как корректно сформулировать задачу, если функционал
ь
ля = ] Каун) ах,
а
(39)
80
3. ВАРИАЦИОННЫЕ
порождаемый
ЗАЛАЧИ
С ПОДВИЖНЫМИ
ГРАНИЦАМИ
дважды непрерывно дифференцируемой функци-
ей /, рассматривается
на множестве
функций
у(7) с разными
областями определения [а, |]? Отметим следующсс.
ция у(2) непрерывно
дифференцируема
на отрезке
Если функ[а, 6], при-
чем в концевых точках существуют односторонние производныс, то эту функцию можно продолжить на больший отрезок
[@0, 65] так, что продолженная функция (5) будет непрерывно
дифференцируемой на отрезке [а0, %]. Учитывая это, можно
сформулировать задачу следующим образом: найти экстремум
функционала,
6
Лина, Ы = | Кальу)ах
а
на классе функций
С"[а0,0] и при значениях параметров @0 <
<а<ь<ь.
Нам удалось сформулировать вариационную задачу так,
что областью определения функционала, как и ранее, является
линейнос пространство. Однако это пространство нс являстся
нормированным, так как „естественная“ норма пространства
Саи, в] не отражает действительную степень близости функций, которая должна отражать степень близости концов графи-
ков функций. Близость функций в данном случае можно задать
при помощи расстояния. Для произвольных функций у(т) и
(2) с концевыми точками А(а, у(а)), В(®, у(6)) и А(@, у(@)),
В(ь, #5) положим
р(-у) = шах (|2) — (2) |+ |9 (2) 1) +|АЯ + ВВ,
где Т = [а
п (а, в] (рис. 3.3).
Окрестностью данной функции у(х) с концевыми точками (а, у(а)), (5, у(5)} в данном
случае является множество функций 9(7) с концевыми точка-
ми (@, 9(а)), (ь, 7(5)), удовлетворяющих неравенству р(й,у) < Е,
гдеЕ> 0.
3.2. Задача с подвижными границами
81
Несмотря на то что поставленная задача не вписывается
в рамки теоремы 1.2 и мы не
можем напрямую использовать
введенные ранее понятия дифференциала Фреше или дифференциала Гато, основная схема,
получения необходимых условий
Рис. 3.3
экстремума функционала применима и в этом случае. Приращение функционала будет завиесть нс только от вариации функции ду =9— у, но и от вариаций
подвижных границ да =а-—аи
96 = 6.
Отметим, что ссли
бу, да, 06 — тройка допустимых вариаций для функционала,
„Лу. а, ], то существует такое достаточно малое число о > 0,
что при |о| < с тройка вариаций аду, оба, адб является допустимой. Следовательно, для фиксированной тройки ду, да, 05 в
окрестности точки (0 определена функция
ф(а) = Лу+ оду, а + ада, 6 + одё..
Если функция
„Лу,
Если
(5)
является
а, ], то функция
при
этом
то, согласно
ф(а)
функция
точкой
ф(а)
нсобходимому
экстремума
будет иметь
дифференцируема
условию
функционала,
экстремум
экстремума
при а = 0.
в
точке
0,
для функции
одного переменного, выполняется равенство ф’(а) = 0.
Применим изложенную схему к функционалу Л]у,а,6] конкретного вида (3.9), предполагая, что интегрант } функционала —
дважды
непрерывно
дифференцируемая
функция.
Пусть
функция у(5) с концевыми точками (а, у(а)}, (5, у(5)) доставляет экстремум функционалу Лу,
а, ]. Запишем
задавшись некоторыми вариациями ду, да, 06:
функцию
6-е
ф(а) =
]
а-+- ода
1 (ту
абу,у - аду) ат.
ф(а),
82
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ
С ПОДВИЖНЫМИ
ГРАНИЦАМИ
Дифференцирование функции Ф(®) — это дифференцирование
интеграла, по параметру, причем в данном случае от параметра,
зависят и пределы интегрирования. При сделанных предположениях
относительно
интегранта
функционала
такое
диффе-
ренцирование возможно, и мы имеем [УП
В--обь
$’ (а) =
д
Зо:[0 (уу + бу, + аб)
4 +
,
ааа
+1 (тукадуу
аду) а 96—Г(тифабул/
Г (уф аду + адуаду)
а ада
ба,
где у=у(т), бу = 6у(т). Значит,
ь
= Е
+ 1„6у’) ах +
а
+ ель
Ф=Ь
96 — Дель
з=а
ба.
(3.10)
Первое слагаемое в (3.10) справа преобразуем, как и ранее
(см. 3.1), с помощью интегрирования по частям:
ь
ь
вич лвуу = | (5-1 вит
а
5.
(3.11)
а
Далее, полагая ду» = 9(Ь-+ 06) — у(6), находим
дуь =9 (+66) —9(5) +96) —ч(Ъ) = 9 (6)66+6(5) = (6)86+6(5).
Проведя аналогичные рассуждения для левого конца и выполнив в (3.11) соответствующие замены, из (3.10) получаем
р г @1 ил,
б
__
$0)
= [(
сели) + ‚/| _
64
ь ЧБ
а
+(-1/)|_
6-1 _ „бе — (1 -— Лу)
ба.
&=а
(3.12)
3.2. Задача с подвижными
границами
83
Получили формулу, в которую вариации ду, да, ду, 96, бу
входят линсино. Как и в случае задал с фиксированными концал
ми, всличину д./[у,0у,да,бу.,06,0%| = Ф'(0) назовсм
варчаци-
ей функционала Лу, а,5] в задаче с подвижными границами.
Формула (3.12) вариации функционала как частные случаи содержит:
— формулу
для
первой
варчации
ной задаче с подвижными
— формулу
функционала
в вариацион-
концами — при ба = 06 =0;
для первой вариации функционала в простейией
задаче вариационного исчисления — при ду = буь = да = 96 =0.
По
аналогии
с выводом
формулы
(3.12)
можно
получить
вывод формулы в болес общем случас функционала,
зависящего
от нескольких
подвижном
функций,
определенных
на, общем
отрезке [а, 6]:
ь
(3.13)
а,
Лу] = | ель
где у = (у, 12, ...; Ув) © С[а,6], а функция {(т,у,у’) дважды
непрерывно
функционала
дифференцируема.
В
этом
случае
для
вариации
имеем
Г
кЛу-бу, ва,би., вы. бы = | УЗ(л,
а
пел
бнаг+
1=1
ТЕ
ЧЬ
3=1
4=1
У виы+ (1-м)
т
#=
ь
96 —
0
У ивья(1-м)
=1
=1
ба.
(3.14)
х=а
Рассмотрим еще одну задачу. Пусть функционал Лу] определен на гладких функциях, концы графиков которых лежат на,
двух фиксированных кривых у = Ф(т)
иу= (5), определенных
814
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ С ПОДВИЖНЫМИ
у=4(5х)
ГРАНИЦАМИ
на [а0, 00] (рис. 3.4).
Пример ва-
риационной задачи с такой областью определения функционала
дает задача вычисления расстояния между двумя кривыми.
Если некоторая функция у(1)}
доставляет экстремум функционалу „Л[у], то она являстся точкой
Рис.
3.4
экстремума среди всех функций,
графики которых имеют с графиком у(т) общие концевые точки. Значит, указанная функция (2) удовлетворяет уравнению
Эйлера. т.е. является экстремалью рассматриваемого функционала.
Следовательно,
в общей
формуле
(3.12)
для вариации
функционала, первое слагаемое равно нулю. Поэтому в данном
случае необходимое условие экстремума принимает вид
Л, +
(Ли)
би — (1-Л,у)
2506 -Лу
Я—=а
ба
= 0.
т=а
Поскольку концы графиков допустимых функций лежат на,
фиксированных кривых, то
буь = 4’ (5)5Ь,
бу, = Ф' (ада.
Поэтому
б.у,
бу, ба, 66] = (АУЛ)
_
ь
96—
= (+9)
В силу независимости вариаций да и 06
(+
-у)л,) , =
И-М),
что даст красвыс условия в данной задачс.
| _ 64 =0.
3.2. Задача с подвижными
границами
85
Краевые условия (3.15) называют условиями трансверсальности.
О кривой у = у(1), удовлетворяющей условиям трансверсальности (3.15), говорят, что она трансверсальна,
кривым у = ф(х)
Пример
иу= (т).
3.3.
Выясним
трансверсальности
функционалов
для
гсомстрический
часто
встречающихся
смысл
условий
в приложениях
вида,
ь
ли = ] АИТ ае,
(3.16)
а
где А(х.у) —
дважды
непрерывно
дифференцируемая
функция
(см. примеры 1.1-1.5). Пусть этот функционал исследуется на
экстремум в классе гладких функций, концы графиков которых
лежат на кривых у = (1)
иу= (т), где функции (т) и (т)
непрерывно
дифференцирусмы.
В данном случае /(х,у,у’) = А(х.у)\/1+ (у)? и
р
Ли = А(т,у)
у
1+)?
1+
ру
(и)2'
Поэтому
(1+
Видим,
1
Г
(у)(12 )-! . ( (1 УТ).
1+ (4)
1+ (у)
что для функционалов
(3.17)
данного типа условия транс-
версальности выражаются особенно просто: у’ (6) = —1/4'(6) в
точке $ и аналогично у’(а) = —1/ф’'(а) в точке а.
Таким образом, условия трансверсальности экстремалей
рассматриваемого функционала к кривым у = (7)
иу= (т)
в данной задаче с подвижными границами ссть условия их
ортогональности этим кривым.
86
3. ВАРИАЦИОННЫЕ
ЗАЛАЧИ
3.3. Экстремали
В
вариационном
функуиюонала
Са, .
самой
Из
с угловыми
исчислении
определения
С ПОДВИЖНЫМИ
есть
постановки
точками
задати,
не может
ГРАНИЦАМИ
в которых
ограничиваться
задачи
может
область
классом
вытекать,
что
функция, доставляющая экстремум функционалу, в некоторых
точках теряет дифференцируемость, и если она и имеет односторонние
производные
в
такой
точке,
то
эти
производные
различаются. К. числу таких задач принадлежат задачи на, отражение и преломление экстремалей, являющиеся обобщением
задач на отражение и преломление световых лучей.
Задача об отражении экстремалей. Эта задача ставится следующим образом. Найти кривую у = (5) (рис. 3.5), кото-
рая соединяет
У
фиксированные точки А(а, уд) и В(Ь, ув) и имеет одну угловую точку С(с, ус),
ре
расположенную на кривой у =
= $(), причем функция у(+)
доставляет экстремум функционалу
О!
х
ь
=
| пои
В этом случае область определения функционала [у] есть
множество функций, непрерывно дифференцируемых на, [а, 8]
всюду, кроме, возможно, одной точки, являющейся угловой
точкой, т.е. в этой точке существуют односторонние производные. Отметим, что если функция у(5) доставляет экстремум
функционалу /|у|, а ее угловая точка, есть (с, у(с)), то сужения функции
на отрезки
[а, с] и [с,6] являются
экстремалями
функционала. Действительно, зафиксировав точку с и значения
функции на отрезке [с, |, мы можем рассмотреть функционал
и = ] Кедру)4
3.3.
Экстремали
< угловыми
точками
87
на классе функций С\[а,с], который отличается от исходного
постоянным значением (значением интограла по отрезку [с, 6]
и достигает минимума на функции у(5).
Значит, функция
(2)
является
решением
уравнения
Эйлера
на
отрезке
[а, с].
Аналогичные рассуждения можно провести и для отрезка [с, В.
Удобно представить функционал /[у| в виде суммы двух
интегралов:
с
ь
Ли= ] Ка) ае + ] Лазни)
ав = ЛИ+ЪИ.
Тогда необходимое условие экстремума
ет вид
функционала принима-
По существу, мы имеем две вариационные задачи: первая —
на отрезке [а, с] с фиксированным левым концом и правым,
движущимся вдоль кривой у = (т); вторая — на отрезке (с, 6]
‹ движущимся вдоль кривой левым концом и фиксированным
правым. Мы можем на отрезках [а, с] и [с,6] рассматривать
только экстремали исследуемого функционала. В этом случае
первые вариации функционалов „Л [у] и
[У] имеют вид (см. 3.2)
дл [и, бу = + (Ул,
9.7, 6у] = (А
|, 096,
-У)Л,)
скодС-
Тогда необходимос условис экстремума д.Л [у, ду]
9.2 [у, 9] =0
в силу произвольности де принимаст вид
(ео
9+
-УЛ,)
ео
=
0,
или
(У,
Условие
=
(3.18) будем называть
УЛ,
о.
(3.18)
условием
отражения.
88
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ С ПОДВИЖНЫМИ
ГРАНИЦАМИ
Выясним физический смысл условия отражения для функционалов вида (3.16). Так как, согласно (3.17), при #=ф
1+1 (фу)
=
Г. (уф) _А. ау)
1+ (у)?
1+ (и? ”
то получаем (при А(т,у) = 0)
1+ру
У
1+
_
(у’)?
с—0
1+9У
\
1+
(3.19)
(и)?
ео.
Пусть 61, д
|
—
на односторонних
(слева
и справа)
углы накло-
касательных
к кривой
у =
= у(<) в точке С, а — угол наклона касательной к кривой у =
= (2) в той же точке (рис. 3.6).
Тогда, угол падения, т.е. острый
Рис.
угол
между
угол между дугой АС и кривой у= (1), равен л — б1 +а,
3.6
а угол отражения,
дугой
СВ
и кривой
у = $(1),
равен
т.е. острый
2 —а.
Так
как
ШВ
=У(с-0),
2 =У(с+0),
ва=ф (о,
условие (3.19) можно записать следующим образом:
12а
|весВ|
_ 1
ща
# 82
[8066]
Учитывая, что косинусы углов 01 и 25 имеют разные
(один из этих углов острый, а другой тупой), получаем
с08
61
(1-65
а 65 бу} + соз
В (1
в а 45 6} =0,
или после преобразования —
с03(В1 — а) + с08(В2 — а) =0.
знаки
8.3. Экстремали с угловыми
точками
89
Полученное равенство с учетом диапазона, изменения рассматривасмых углов означает, что л — 1 +а = 92 -—а, т.е. угол
падения кривой у = у(2) равен углу отражения.
Если луч света распространяется со скоростью %(5,у) в
неоднородной плоской среде, ограниченной кривой у = ф(т), то
время Т', затраченное на, прохождение луча из точки А(а, уд) в
точку В,
ув), выражается интегралом
тУ
%(х,у)
(3.20)
Свет распространяется так, что луч проходит от одной точки
до другой за минимальное время. Мы имеем дело с вариационной задачей для функционала вида (3.16). Реальная траектория
луча является решением вариационной задачи, и мы получаем
подтверждение известного физического закона: угол падения
луча света, на отражающую поверхность равен углу отражения.
Задача о преломлении экстремалей.
чией задаче вариационного исчи- у
сления (2.1), (2.2) концы графика допустимой функции А(а, уз)
и В(Ъ, %) находятся по разные
р
р
р
р
!
стороны от гладкой кривой у =
= ф(т), которая разбиваст полосу {(1, у: азт< 5} на две области О: и Бо (рис. 3.7), причем
Л(т,
уу),
(ту),
Пусть в простей-
с
Рис. 3.7
(т,
У)
ЕР;
(т,
у) ер>,
где А (ру,у) и Ло(т,у,у) — дважды непрерывно дифференцируемые функции своих аргументов.
В этой задаче, как и в предыдушей, в качестве области определения функционала следует выбрать множество функций, у
90
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ С ПОДВИЖНЫМИ
ГРАНИЦАМИ
которых график в точках пересечения с кривой у = ф(5) может имсть излом. Мы предполагаем, что допустимая функция
непрерывна,
а
в
указанных
ронние производные.
точках
имеет
конечные
односто-
‘Точки экстремума функционала нужно
искать среди таких функций,
которые
на участках гладкости
являются экстремалями этого функционала.
Точка С(с, ус)
являстся подвижной, а сс координаты связаны соотношением
ус = Ф(<).
Поэтому,
как
и в случае
отражения
экстремалей,
имеем
098 —(р+(Ф’- у) (и)
(Л -у)()ь)
=
Необходимое условие экстремума 9.7 = 0 на функциях
ного вида записывается следующим образом:
(Л+я-у0
у)
5 о= (№ +@ -9)05))
(условие преломления).
записать так:
В
развернутом
Л (с ф(е),у (с-0)) + ($ (©) — у (с-0))
= Л2(с,ф(е,у (+0)
виде
о) (сре
с.
ео
указан-
(3.21)
с
его
можно
(<-0)) =
+ ($ (<) — у (е+0)) (РЬ (е фе), (е+0)).
Чтобы решить задачу о преломлении, нужно найти экстремали исследуемого функционала в областях 01 и Ро, решая два,
уравнения Эйлера для интегрантов }1 и }>. Среди этих экстре-
малей в областях 01 и Ро надо выбрать те пары у1(1) и 92(),
которые
удовлетворяют
(а)
=ул,
краевым
(о =Ф(е,
и условию преломления
(3.21).
условиям
у2(с) =ф(е),
у2()=ув
Экстремум функционала можст
достигаться только на таких функциях.
Выясним физический смысл условия преломления,
рассмо-
трев функционал вида (3.16), в котором функция А(т,у) имеет
3.3. Экстремали с угловыми
линию
разрыва, у = (2).
Обозначив
точками
91
А(т,у) = А1(т,у)
А(х,у) = А(т,у) в 2 и использовав
условие преломления в виде
(3.17), можем
1+ (92 [о
в Ри
записать
Т+ (97)? [ео
Вводя, как и в случае отражения экстремалей, обозначения 01,
85, а и проводя аналогичные преобразования, получаем
е08(а — 1)
— 42 (с, +(с))
сов(а — 62)
или
Аз (е,ф(©))’
зт(л/2 — («- 81)) _ 42 (с, (с)
зщ(л/2— («—
В2))
Ал (с, (с)
Распространение свста описывастся
которого
функционалом
1
Ат(х,у)
=
91 (2,9)
`
(3.20), для
1
з
Аз(х,у)
=
2(7,у)
)
и условие преломления в этом случае преобразуется к следуюшсму:
эт(т/2-— («-— 61)) Ш (с, Ф(с))
зт(т/2— (&- 62) — 12(е,9(«))
Это соотношение представляет собой закон Снеллиуса прелом-
ления света, согласно которому отношение синуса угла, падения
к синусу угла преломления равно отношению скоростей распространения свста в двух средах.
В задачах
на отражение
и преломление
чис точки излома у графика функции,
экстремалей
на которой
нали-
достигается
экстремум, вытекает из постановки задачи. Но даже в задачах
с гладким интегрантом в отсутствие каких-либо дополнительных условий функционал может не иметь экстремумов в классе
92
3. ВАРИАЦИОННЫЕ
непрерывно
ЗАДАЧИ С ПОДВИЖНЫМИ
дифференцируемых
функций,
ГРАНИЦАМИ
а решение
вариаци-
онной задачи следует искать в более пгироком классе функций,
например среди функций, графики которых могут иметь точки
излома.
Пример
3.4. Исследуем на экстремум функционал
2
=
[6 (1—4
(3.22)
0
при краевых условиях (0) = 0, у(2} = 1.
Так как интегрант неотрицателен, то .Ли| > 0 на любой
допустимой функции у(7).
Любая функция у(2), для которой Лу|=0, может рассматриваться как точка, экстрсмума
функционала,
даже если она не является непрерывно дифферен-
цируемой на отрезке
[0, 2].
В качестве такой функции
можно
взять, например,
Такая функция не является единственной. Подходит любая кусочно линейная функция, производная которой принимает лишь
два значения — 0и1
(за исключением одной или нескольких
точек излома).
Если функция у(т) непрерывно дифференцируема, на отрезке [0,2], то функция у’(1) непрерывна на этом отрезке и
поэтому не может принимать лишь два значения: О и 1. Следовательно, в интеграле (3.22) непрерывная неотрицательная
подынтегральная функция отлична от нуля хотя бы в одной
точке.
Значит,
для
непрерывно
дифференцируемой
(т) имеем Лу] > 0. В то же время можно
любой окрестности функции 9,(4) (
функции
показать, что в
>.) имеются
гладкие функции, значение функционала, на, которых, в силу его
непрерывности, мало отличается от значения функционала, на,
3.3. Экстремали с угловыми
точками
93
функции у.(т), т.е. от значения 0. Таким образом, значение 0
являстся
точной
нижнсй
гранью
значений
функционала,
и это
значение не достигается в классе непрерывно дифференцируемых функции.
#
Укажем
условия,
которым
должны
удовлетворять
точки
экстремума функционала (3.1), если его область определения —
множество кусочно гладких функций на отрезке [а, 6]. Мы на-
зываем функцию кусочно гладкой на промежутке Т’, если она
непрерывна на этом промежутке, имеет на нем непрерывную
производную всюду, кроме, возможно, конечного числа, точек, в
которых функция имеет конечные непрерывные односторонние
производные. Во-первых, каждый гладкий участок функции,
являющейся точкой экстремума, должен удовлетворять уравнению
Эйлера
(т.е.
быть
экстремалью).
Во-вторых,
исходя
из необходимого условия экстремума функционала, можно заключить, что в каждой угловой точке т, функции, являющейся
точкой экстремума, выполняются следующие условия Веферштрасса — Эрдмана:
В
О
__
з
пи!
и
в!
(У-ул,) во = (А -УА,) |0
Лу
х.-0— и
ж„-0°
Эти условия в совокупности с требованием непрерывности
функции у(т. — 0) = у(х. +0) позволяют найти координаты
угловых точек, если они есть.
Пример
3.5.
Рассмотрим
функционал
ь
И =
ог)
а
и условия Вейерштрасса — Эрдмана для него.
и
1
Ри
Второе условие
с
=
с-+0
принимает вид 2%'(с — 0) =2%'(с+ 0), т.е. означает равенство
односторонних производных
ки экстремума функционала,
в любой точке.
Значит,
все точ-
даже в классе кусочно гладких
94
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ С ПОДВИЖНЫМИ
ГРАНИЦАМИ
функций, не имеют угловых точек и являются непрерывно диф
ференцируемыми функциями. Напомним, что условие Фи 0
являстся достаточным для того, чтобы экстремали функционала были
дважды
дифференцируемыми
(см. теорему
2.2).
В
этом случае экстремаль не имеет угловых точек, и рассмотренный функционал — тому пример (для него }„„=2 для любых
значений аргументов функции /).
Вопросы
и задачи
3.1. Запишите условия трансверсальности на правом конце
в вариационной задаче
и-
вый Мт-
(2')2 4х —ехы,
у(а)
=,
(0) =Ф(),
функционал которой определен на множестве непрерывно дифференцируемых функций. Предполагается, что значения а, ус
фиксированы,
А(х,ф(т)) = 0, а Ф(т)
непрерывно
дифференци-
руема.
3.2. Докажите общую формулу (3.14) вариации функционала, зависящего от нескольких функций, в задачс с подвижными
границами.
3.3. Запишите
условие
трансверсальности
на, левом конце в
вариационной задаче
|й)
Пу,2] = Г лбьн,
2(а) = (ал(а)),
1+
(97)? + (2)?4х —ехи,
36) =,
#0) =
функционал которой определен на множестве кусочно гладких
функций, 6, %%, 2, фиксированы, ф(т,у) непрерывно дифферен-
цируема и А(т,у,ф(т,у)) 7 0.
Вопросы и задачи
3.4. Выведите формулу
95
для первой вариации функционала
$
Пу = Г лазуидаы
й
в задаче
со свободными
концами
(предполагается,
что у
ЕС?[а,5]).
3.5. Получитс условия трансверсальности на правом конце
в вариационной задаче
ь
Пу,2] = ДГ ееельану
да
—ехт,
а
(а) =уа
2(а)=2,
26) = (6,5 (5)),
функционал которой определен на множестве пар кусочно гладких функций,
а, У, 2
фиксированы.
3.6. Получите условия трансверсальности на правом конце
в вариационной задаче
ь
Пи = [ Розу)
екы, уеду»
ФУ) =0,
а
функционал которой определен на множестве кусочно гладких
вектор-функций, а, уз Е В" фиксированы.
3.7. Найдите экстремали в следующих
чах с правым подвижным концом:
ь
а) Де
— сх,
(0) =0,
у(5)
вариационных задал
+6+1=0;
0
6) [у (у)?
)
у
4х
}ехт,
9(0)=0, у(5) =Ь-5;
96
3. ВАРИАЦИОННЫЕ
ЗАДАЧИ
С ПОДВИЖНЫМИ
ГРАНИЦАМИ
е
в) [оу - 22у) а
ока,
((/)? —9+1) 4х > схы,
А
м1
(т) =е;
(0)
)2 4х + ехёт,
9(0)=0, у(Ь) +65+1=0.
0
3.8. Используя методы вариационного исчисления, найдите
расстояние от начала координат до плоской кривой 224/ = 1.
3.9. Используя методы вариационного исчисления, найдите
кратчайшее расстояние между двумя кривыми на плоскости:
а) у=л?
иу=х-5;
3.10.
Выясните,
бу=
+2 иу=а.
имеет ли функционал
задачи
[и
И = |
ли У’
(у?)4=,
уа)=у»
=
экстремали с угловыми точками.
3.11. В вариационной задаче
ь
ля = ] Ра),
О-о,
0-1
с угловыми
точками.
а
найдите
экстремали
функционала,
4. ЗАДАЧИ
НА УСЛОВНЫЙ
ЭКСТРЕМУМ
4.1. Основные
на условный
типы задач
экстремум
Рассмотренные ранее задачи характеризовались тем, что их
решения должны были удовлетворять некоторым условиям на
границе области интегрирования (краевым условиям). Однако во многих важных приложениях вариационного исчисления
на решение задачи накладываются некоторые дополнительные
условия. В этой связи вспомним задачу Дидоны (см. пример
1.1). Контур (т.е. ремень из бычьей шкуры), которым охватывался участок земли, имел вполне определенную длину. Это
значит, что функция, дающая решение задачи Дидоны, должна
удовлетворять не только краевым условиям, но и дополнительному
условию:
длина
графика
функции
фиксирована.
Приве-
дем общую формулировку задачи, в которой на допустимые
функции накладываются дополнительные условия — так называемые условия связи.
Пусть требуется наити экстремум функционала
ь
Лу = ] оу),
Уи),
4
который мы будем называть целевым функционалом, на
множестве функций (2) из класса С\([а. В") непрерывно
дифференцируемых воктор-функций, удовлетворяющих красвым условиям
(а) =шм,
У()=у
(4.2)
98
и
4. ЗАЛАЧИ
некоторым
выражаться
УСЛОВНЫЙ
соотношениям
ЭКСТРЕМУМ
(условиям
связи)
которые
могут
дифференциальными уравнениями
9,
или
НА
у’) =0,
1=ЪЕ
(Е <п),
те
[а, Ы,
(4.3)
интегральными
ь
Дыбьин) =,
1=1,
8.
(4.4)
[3
Здесь везде предполагается, что функции }{, 9%, 9=Т,,
р;
1=1,8, дважды непрерывно дифференцируемы и краевые
условия (4.2) не противоречат условиям связи (4.3).
Дифференциальные соотношения (4.3) называют дифференциальными связями, а соотношения (4.4) — интегральными (изопериметрическими) связями.
Особо отметим
частный
случай,
когда в соотношениях
(4.3) функции
9; нс за-
висят от у’. В вариационном исчислении такие связи называют
фазовыми ограничениями, а в тсорстической механикс —
голономными связями.
Сформулированная задача общего вида представляет собой
вариационную задачу на условный экстремум. Частный
случай
ные
задачи,
связи
чающиеся
(4.3),
наложены
только
а также
различные
ее
краевыми
интегральными
жа.
в которой
условиями
связями
(а иногда
дифференциаль-
модификации,
отли-
с дополнительными
(4.4) }, называют
задачей
Лагран-
Эта задача была опубликована Ж.Л. Лагранжем в 1788 г.
в его „Аналитической
механике“.
Задачу
(4.1),
(4.2),
(4.4)
с интегральными связями называют изопериметрической
задачей, рассматривая ее как обобщение классической задачи
определения
среди
плоских
(изопериметрических фигур)
площадь (см. 4.4).
фигур
одинакового
той, которая
периметра,
имеет наибольшую
4.1. Основные
типы задач на условный экстремум
99
Отметим, что изопериметрическую задачу (4.1), (4.2), (4.4)
можно свести к задаче Лагранжа, введя новые функции
на
49: (2) =
[нбозьу)
т,
1=1,
8.
(4.5)
а
Тогда, вместо интегральных соотношений
ференциальные соотношения
31
(2)
При этом, согласно
=
№: (5.9.9),
й
=
(4.4) получим
1,
5.
диф-
(4.6)
(4.4),
ф(а)
=0,
45)
= 4,
1=18.
(4.7)
Таким образом, изопериметрическая задача эквивалентна,
следующей задаче Лагранжа:
найти систему п + 3 функций
Чл; -..) Уп, Ч, -.., фз, связанных соотношениями (4.6) и удовлетворяющих краевым условиям (4.2) для функций у) 1=Т п,
и условиям (4.7) для функций 4; {= Т, 8, которая доставляет
экстремум функционалу (4.1).
К задаче Лагранжа сводится и задача, об экстремуме функционала, зависящего от высших производных. Для функционала,
и
ла.
у”) ах
нужно ввести новые функции
=,
ШИНУ,
ФЕИ"
..,
Ш =”.
Тогда, исходный функционал заменяется функционалом
ь
Лус
у,
9]
—
Кель
а
ооьувь
100
4. ЗАДАЧИ НА УСЛОВНЫЙ
неизвестные
функции
в котором
ЭКСТРЕМУМ
связаны
уравнениями
=,
и
—
92,
!
Уп—1
4.2. Необходимые
—
условия
Ул.
в задаче
Лагранжа
Задачи на условный экстремум встречаются и в конечномерных задачах, когда аргументы функции многих переменных,
экстремум которой нужно найти, связаны некоторыми функциональными соотношениями. Для решения этих задач обычно
используют метод множителей Лагранжа [\]. Этот универсальный метод, основанный на введении множителей Лагранжа,
и составлении функции Лагранжа, применим и для функционалов.
Сформулируем необходимые условия экстремума функционала в задаче Лагранжа (4.1)-(4.3}. Будем предполагать, что
функции 97 (туу’),
1 =1, Е, непрерывно
дифференцируемы
по
переменным у’ и ранг матрицы Якоби по этим переменным
О
максималсн
и
/
/
У)
равен
к.
1
—
Мы
0991
942
0992
09к
09»
ди
да
да
бу
ду
ду»
ду
ду>
09%
Одь
ду
ду
...
09%
``’
считать,
ду
что
99
9у,
0
ду»
|...
можем
99%
ди
9
ду
^^
092
д
Одь
20,
(4.8)
4.2. Необходимые условия в задаче Лагранжа
101
так как при необходимости можно изменить соответствующим
образом порядок переменных у; и функций 9;.
Теорема 4.1. Если вектор-функция у*(2)= (1 (1), ..., у*(2))
из СК[а,6],
Е") является решением задачи (4.1)-(4.3) и при
этом выполнено условис (4.8), то существуют такис функции
А1(х), ..., Аь(ф), что у* (т) является экстремалью функционала,
ь
р
Гу = [иль
Функционал
Гу]
будем
называть
функционалом задачи (4.1)-(4.3).
ного функционала,
#
(4.9)
вспомогательным
Интегрант
вспомогатель-
т.е. функцию
И=/+У
к
9,
(4.10)
=
называют функцией Лагранжа (лагранжианом) задачи
(4.1)-(4.3). В функцию Лагранжа входят левые части дифференциальных связей с коэффициентами Л;(), которые называют множителями Лагранжа.
Будем называть экетремалями задачи Лагранжа экстремали функционала (4.1), удовлетворяющие краевым услови-
ям (4.2) и дифференциальным
связям (4.3) (в частности, фазо-
вым ограничениям). Теорема 4.1 фактически утверждает, что
все экстремали задачи Лагранжа содержатся в множестве экстремалей вспомогательного функционала, [*[у]. Значит, чтобы
найти их, нужно из экстремалей вспомогательного функционала выбрать те, которые удовлетворяют условиям (4.2), (4.3).
Другими
словами,
экстремали
удовлетворяющие краевым
ным связям (4.3), являются
Учитывая сказанное, из
ную систему условий для
вспомогательного
функционала,
условиям (4.2) и дифференциальэкстремалями задачи Лагранжа.
теоремы (4.1) легко получить волэкстремалей задачи Лагранжа, т.е.
102
4. ЗАДАЧИ
НА
УСЛОВНЫЙ
ЭКСТРЕМУМ
систему, в которой количество неизвестных равно числу уравнений.
(1=1, п)
Действительно,
ил; (2) (=Ъ
для п + К нсизвостных
функций
у*(т)
А) мы имеем п уравнений Эйлера
Чт Иа
о
л=Тв,
4
5
2
(4.1)
для функционала, Г* [у] и К условий связи (4.3). Среди решений
этой системы выбирают те, которые удовлетворяют краевым
условиям (4.2), причем эти условия не должны противоречить
условиям связей.
Замечание 4.1. Иногда в качестве лагранжиана
функции (4.10) используют функцию вида
вместо
К
=
где
Ло = со.
При
+
этом
УЛ:
7—1
полагают
Ло 2 0,
если
в задаче
(4.1)-(4.3) ишется минимум, и Ло < 0, если ищется максимум.
Добавление в лагранжиан еще одного множителя Ло на самом
деле не оказывает существенного влияния, так как фактически
равносильно умножению лагранжиана на, некоторое число. Такое умножение, если Ло 72 0, не изменяет множества, решений с\стемы уравнений Эйлера.
А значение Ли = 0 есть вырожденный
случай, в котором задача, поиска экстремалей вспомогательного функционала теряет смысл, так как эти экстремали никак
не будут связаны с целевым фуниционалом.
Для иллюстрации задачи Лагранжа остановимся на, двумсрном случае (п =2), когда задано
(К =1). т.е. будем решать задачу
одно
фазовое
ограничение
|
Лу, 2] = | пельеу
дат
ока
(4.12)
а,
(а)
— Ча,
9(т,у,2) =0.
(6)
— 6,
2(а)
—
2а;
2(5)
—
2,
(4.13)
(4.14)
4.2. Необходимые условия в задаче Лагранжа
Частным случаем этой задачи является задача
103
о геодезиче-
ских линиях, в которой требуется на заданной поверхности
найти кривую наименьшей длины (см. 4.4).
В
задаче
(4.12)-(4.14}
допустиьмььми
функциям
являются
пары функций (5), (2) Е Са, В, для которых кривая у = у(5),
= = (т) лежит на поверхности 9(7,у.2) = 0. Мы предполагаем,
что эта поверхность не имеет особых точек (т.е. (4/,)? + (9)? +
+ (9')? 20). Теорема 4.1 в этом случае сводится к следующему.
Теорема 4.2. Если пара функций у*(т), =* (1) Е СЧа, 6]
является решением задачи (4.12)-(4.14), причем (9,)? + (9%)? 70,
то существует такая функция А(т). что пара функций у*(х),
=*(1} является экстремалью функционала
ь
Пи. = бб, 2,',2/) + №9(,у,2)} 45.
а
< Сначала рассмотрим частный случай, когда уравнение связи 9(5,у,2) = 0 разрешимо относительно одной из переменных,
например =. Тогда это уравнение равносильно уравнению х =
= $ф(т, у), где функция ф(т,у) дважды непрерывно дифференци-
руема, так как, по предположению, дважды непрерывно дифференцируема функция 9(7,1,2). Условие непротиворечивости
уравнения связи краевым условиям в данном случае означает,
ЧТО 2а = ф(а, у) и 25 = Ф(6,ь).
Уравнение
2 = ф(т,у)
позволяет
свести
рассматриваемую
задачу к задаче с одной неизвестной функцией.
Действительно,
если у*(х), 2*(т) — решение задачи (4.12)—(4.14), то функция
у*(т) является решением простейшей задачи вариационного
исчисления
ф
ара
а
еее)
ехиь
у(а)=у«,
Уб)=у.
(4.15)
104
4. ЗАДАЧИ НА УСЛОВНЫЙ
Поэтому,
согласно
)
уравнению
ет вид
Эилера
теореме
2.1,
ЭКСТРЕМУМ
функция\
для функционала этой
овлетворяет
аланы, которое
Чи-Ли)
=.
име-
426)
Так как
И
1
ифу)
ны
ру (РФР (ру
= ии, т
(р у)
Фи ),
то уравнение (4.16) равносильно следующему:
п
а
Частную
производные
идь
производную
функции
Фу
9
можно
выразить
следующим
образом:
(4.17)
через
частные
Фу = —9/9.-
Сделаем соответствующую замену в уравнении (4.17):
и (1) - п
1\9
(али
(ини =0
и
(4.18)
Уравнение (4.18) заменой
(в)
1
-Л)
!
1
приводится к виду
4,
и)
.
№ =0,
(19)
а формулу замены можно записать следующим образом:
Е) - В №: =0.
4
/
!
_
(4.20)
4.3. Необходимые условия в изопериметрической задаче
Соотношения
(4.19),
105
(4.20) представляют собой уравнения
Эйлера для вспомогательного функционала,
Ь
Г» = [ Фельгн/,2)
+ Мадобеьа)) аз.
а
Итак, ссли у*(1), 2*(2) ость решснис задачи (4.12)-(4.14),
то у"(х) является решением задачи (4.15), а следовательно,
и уравнения (4.16). Но тогда пара функций у*(2) и 2*(5) =
= 9(т,/*(т)) удовлетворяет системе уравнений (4.19), (4.20),
т.е. системе уравнений Эилера вспомогательного функционала.
Теорема
доказана
в частном
случае,
когда
уравнение
связи
9(2,4,2) =0 разрешимо относительно переменного 2.
Отметим, что доказательство тсорсмы 2.1, базирующесся
на лемме Дюбуа-Реймона, которая в свою очередь опирает-
ся на лемму Лагранжа,
локальные
вариации,
т.е.
в конечном счете использует только
вариации,
малые
по
норме
|||
си
отличные от нуля лишь в малой окрестности заданной точки
0 Е [@, 6]. График такой вариации ду(х) отличается от графи-
ка варьируемой функции у/* (5) лишь в малой окрестности точки
(20, и" (50). Эту окрестность можно выбрать настолько малой,
то в ней при 9, 7 0 уравнение 9(5,у,2) = 0, согласно теореме
о
неявной функции, разрешимо относительно переменного х. Если в точке (70, У*(т0), 2*(50)) имеем 4, =0, то в этой точке и в
некоторой ее окрестности 9 7 0, так что мы можем уравнение
9(2,4,2) =0 разрешить относительно переменного у. №
4.3. Необходимые условия
в изопериметрической задаче
Как было показано в 4.1, изопериметрическую задачу можно свести к задаче Лагранжа. Основываясь на таком преобразовании,
получим
необходимые
нала для этой задачи.
условия
экстремума
функцио-
106
4. ЗАДАЧИ НА УСЛОВНЫЙ
ЭКСТРЕМУМ
Согласно (4.5)—(4.7), изопериметрическая задала, (4.1), (4.2),
(4.4) эквивалентна, задаче Лагранжа с целевым функционалом
(4.1), дифференциальными связями (4.6) и краевыми условиями
(4.2), (4.7). Заметим, что в такой задаче ранг матрицы Якоби
дифференциальных связей по переменным у; максимален, так
как, например,
—1
9(91,
.,95)
0
“|
о.
0
—1
0
.........
0
0
70.
—1
где 9/(ж,у, у’, Ф.Ф’) = А, (ку,у) — 4, 1=1, 3.
можно применить теорему 4.1.
Запишем вспомогательный функционал
Следовательно,
ь
гы.
- /(^ у, у’ ни
ау’ )-9/))4==
а
ь
= [елну льды,
аз
где Ф = (41, ..., $),
а
р
ЧЛи
-л,
=
(4.22)
4=Ьп
Так как Л, = 0, р. =—фА»; получим
=0,
7=1,
д
а
Лт)
4.3. Необходимые условия в изопериметрической задаче
107
Таким образом, в изопериметрической задаче множители
Лагранжа постоянны, а оставшиеся уравнения системы (4.22)
можно записать следующим образом:
ии
2=Т®
(4.23)
8
где № =АНУ
=
Система
А.
(4.23)
являстся
системой
уравнений
Эйлера
для
функционала,
ь
Гу = [ Аи]
м
4х,
(4.24)
и поэтому функции ут, ..., у*, удовлетворяющие системе уравнений (4.22), являются экстремалями функционала (4.24). Интегрант функционала (4.24) называют
функцией
Лагранжа
изопериметрической задали.
Теорема 4.3.
Если функции 9*(т), ..., у*(т) из СЧа, 8]
доставляют экстремум функционалу в задаче (4.1), (4.2), (4.4),
то существуют такие числа А1, ..., А, что функции у*(т), ...,
1 (1) являются экстремалями функционала (4.24). #
Теоремы
4.1 и 4.3 представляют
собой обобщение
правила,
множитслси Лагранжа, применяемого для исследования функций многих переменных [У |, на случай гладких бесконечномерных
задач
вариационного
исчисления.
Поэтому
и
в
вариацион-
ном исчислении метод решения задачи Лагранжа и изопериметрической задачи, базирующийся на определении функций
Ат) и коэффициентов А}, часто называют методом множителей Лагранжа. При этом экстремум, который нужно
найти в указанных задачах, называют условным экстремумом. Уравнения (4.11) называют уравнениями Эйлера задачи Лагранжа (4.1)—(4.3), а уравнения (4.23) — уравнения-
ми Эйлера
изопериметрической
задачи (4.1), (4.2), (4.4).
108
4. ЗАДАЧИ
НА
УСЛОВНЫЙ
ЭКСТРЕМУМ
В заключение отметим, что в рассмотренных вариационных задачах на условный экстремум правило множителей Лагранжа распространяется и на условия трансверсальности
(см. 3.1). Эти условия записываются так же, как и для задачи на, безусловный экстремум, но при этом роль интегранта
{ играет функция Лагранжа соответствующей задачи.
Пример 4.1. Рассмотрим
правой подвижной границей
изопериметрическую
#2
у
задачу
с
22
= Дуга
0
(0) =0,
— ехиы,
ты
4х = 0,
[о
9(12)-22+2=0.
Запишем функцию Лагранжа /* = (у)? + (12у). Уравнение
Эйлера
и
4
ж\!
-
у =0
ж\/
для вспомогательного функционала
Интегрируя его, получаем
у=ЗА
+ ОЕ
будет
иметь
вид у” = 6А.
Со.
Из краевого условия у(0) = 0 получасм С› =0. Чтобы найти
оставшисся нсизвостные А, С1, 12, составим систему из трех
уравнений. Первое уравнение — это изопериметрическая связь,
которая
с учетом
вида функции
у такова:
22
| 12(3А2? + Сие)аз = 0.
о
Второе уравнение
принимающее вид
—
это
ЗА
краевое
+ (112
условие
= 12-2.
(4.25)
на
правом
конце,
(4.26)
4.4. Некоторые
примеры
109
Наконец, третье уравнение — это условие трансверсальности
на правом конце (см. 3.2)
(Иф-9)"),)
=0,
У=1
которое в данном случае при }* = (у)? + Л. 12у и 9(2) =х-2
имеет вид
(и)? +. 12у+ (1-9) -2,') |, =0.
7—2
Система трех уравнений
(4.25)-(4.27)
(4.27)
имеет два решения.
Первое у = 0 (для него 12 =2, /=0), второе у = —352? — 4х (для
него т2=—2,
/=32).
4.4. Некоторые
примеры
Пример 4.2. Вернемся к задаче Дидоны (см. пример
Она представляет собой изопериметрическую задачу:
1.1).
[2
Лу] = а
— шах,
у(—а)=0,
у(а)=0,
—@
ки=
|
Иа
(2 > 24).
В соответствии с теоремой 4.3 составляем вспомогательный
функционал
а
“=
[с +АУт+
(у) 4
—а
и записываем для него уравнение Эйлера:
й
ло
4 \ Ут+ (у?
110
4. ЗАДАЧИ
НА
УСЛОВНЫЙ
ЭКСТРЕМУМ
Видно, что это уравнение допускает понижение порядка:
И
или
ЕО
т
№
‚р
у
1- (и)?
©+0))
Из этого уравнения найдем у:
НЕЖИН
И@ С,
Решая это обыкновенное дифференциальное уравнение первого
порядка с разделяющимися переменными, получаем
012+ 6,
- (2+ №
у=+У
что равносильно
(+ С)? + (у- 62) = №.
Из краевых условий
(а+0 2+0 =
= №,
(ао
находим:
С =0,
Таким
образом,
уравнение
^№=О+а.
кривой
сводится
к следующему:
а + (у— С>)? = С? На.
Длина дуги окружности может быть вычислена непосредствснно, и мы получим еще одно уравнение*
2\/С2 +а? атсаш
МСУ
ЕЕ
а?
*При этом следует учесть, что из двух дуг окружности, соединяющих
точки (—а, 0) и (а, 0), графиком функции является только меньшая.
4.4. Некоторые примеры
111
которое заменой
ет
ве (с. >|;
приводится к трансцендентному уравнению Г, зтф = 2а+. Решение этого уравнения из промежутка (0, л/2] позволит определить постоянную (5 при К < ла.
Пример
4.3.
Рассмотрим задачу выбора кривой наимень-
шей длины среди кривых на сфере 22+ г +2
= а?, проходящих
через две данные точки (51, 91, 21) и (52, у, 22).
Предположим, что в качестве параметра кривой можно выбрать координату т (это возможно только при определенных
положениях концевых точек). Тогда кривая описывается парой
функций 9(1), 2(т), а длину кривой можно выразить интегралом
„Ду,== [у
(и)? - (=)? ах.
Мы приходим к вариационной задаче поиска, минимума функционала „/[у,2] с красвыми условиями
(1)
#(51)
=,
(22)
==,
=
2,
2(%2)
=
22
(4.28)
и фазовьм ограничением
9(2,у,2)
на
фа
=0.
Составляем вспомогательный функционал
22
Лу, 2] = [=
а
(+
(=) + (а)
(Р-Р
а”)
ах.
112
4. ЗАДАЧИ НА УСЛОВНЫЙ
ЭКСТРЕМУМ
Два уравнения Эйлера для вспомогательного функционала и
условис связи в совокупности составляют систему трех уравнснии относительно трех неизвестных функций у(2), 2(1), А(1):
С
И 2^(т)у =0
ее
То
1
4
ы
2А(5)2 = 0,
Раа
=0.
Решение задачи следует искать среди решений этой системы,
удовлетворяющих краевым условиям (4.28).
Однако решить
указанную систему весьма непросто.
4.5. Принцип
взаимности
в изопериметрических
задачах
Постоянство множителей Лагранжа в изопериметрической задаче приводит к так называемому принципу взаимности, или принципу двойственности.
В изопериметрической
задаче
(4.1),
(4.2),
(4.4) мы
искал
ли экстремум функционала (4.1) при условии, что другие 8
функционалов принимают заданные значения Ё;, 7 = 1, 8. Заметим, что уравнение (4.24) для вспомогательного функционала
в методе множителей Лагранжа не изменится, если подынтегральное выражение умножить на некоторое постоянное число
ро. Вводя обозначения
=,
ВЕЙ,,
и = ИоАр
получаем
ь
ног
=
5
Ушла
а
2—0
1=1,8,
4.5. Принцип взаимности в изопериметрических задачах
113
В это выражение все функции ]; входят симметричным
образом. Это означает, что в качестве подынтегральной функции целевого функционала можно выбрать любую из функций
Г. а остальные отнести к изопериметрическии связям (4.4).
Лругими словами, экстремали в задаче на экстремум, в которой интегрантом полевого функционала являстся функция
№; а остальные функции {; отнесены к интегральным связям
(4.4) (задача А), совпадают с экстремалями в задаче на экстремум (задача В), в которой интегрантом целевого функционала,
является функция /, а остальные функции }; определяют изопериметрические условия
6
[пельядат
=
71=0,1,....т-1 т-1...,
8.
а
При этом постоянная Гл равна экстремальному значению функционала в задаче (А), а остальные Г; те же, что и в интсгральных связях (4.4). В качестве {„ можно выбрать любую
из функций ]1, ..., [».
Описанное совпадение экстремалей и называют
взаимности
(принципом
двойственности).
принципом
Например,
задача
Дидоны (см. пример 4.2), состоящая в определении максимальной площади фигуры при заданном периметре, двойственна
другой варцационной задаче, которая состоит в определении
минимального периметра при заданной площади. Обе эти задачи имеют одни и те же экстремали, если максимум площади
в первой задаче задается как ограничение во второй.
Можно показать, что дуга окружности у* = а? — 12, найденная в примерс 4.2 как экстремаль функционала,
а
[у] = а
—@а
14
4. ЗАДАЧИ НА УСЛОВНЫЙ
ЭКСТРЕМУМ
при заданной длине
[2
к =|У
=о
—@а
доставляет максимум этому функционалу. При этом Л[у”| =
= ла?/2. Эта же функция у* = У а? — 12? доставляет минимум
функционалу длины К[У] при заданной площади
4.6. Задача
Анализ
Больца
вариационных
и задача
„Л[у] = ла? /2.
Майера
задач в зависимости от типа урав-
нений связи (см. 4.1, 4.2) показывает, что задача Лагранжа
является наиболее общей.
Другие задачи либо представляют
собой частные случаи задачи Лагранжа, либо сводятся к ней.
Проведем классификацию вариационных задач по типу целевого функционала. Задача
левым функционалом
(4.1)-(4.3)
с интегральным
це-
[р]
Лу = [| ельу)
представляет собой, как уже говорилось, задачу Лагранжа.
Если в задаче Лагранжа интегральный целевой функционал
заменить терминальным целевым функционалом
Ти] =Т(и(а), (5),
который
функцией
определяется
Т(у1,у2),
смешанным
дважды
непрерывно
то получим
задачу
целевым
функционалом
Ву =Лу+Ту
дифференцируемой
Майера.
Задачу
со
4.6. Задача Больца и задача Майера
115
называют задачей Больца. Во всех трех типах задач предполагается, что условия связи имеют вид (4.3), а краевые условия
в самом общем виде записываются следующим образом:
+
(а,
у(а),6,у(6))
= 0,
т=1,
8,
где количество 3 уравнений связано с размерностью 7% фазового
пространства
неравенством
3 < 2 +2.
Иногда задачу со смешанным целевым функционалом без
ограничений (т.е. без условий связи) называют элементарной
задачей Больца.
Задача Больца, так же как и задача Майера, может быть
сведена к задаче Лагранжа. Покажем это на примере задачи
Больца, для целевого функционала вида,
ь
В = ] На) а +Т(у()
с дифференциальными
связями
(4.3) и краевыми условиями
у(а) = у".
Отрезок
дважды
[а,6]
считаем
непрерывно
(4.29)
фиксированным,
(4.30)
а функцию
Т(у)
—
дифференцируемой.
Для рассматриваемой задачи
Т(у(@
Т(и
Т(и(@))}) = Ти) ) = сои,
а
6 —а
так как а, 6, у! в данной задаче фиксированы. Учитывая это,
терминальное слагасмос Т(у()) в правой части (4.29) можно
преобразовать к виду
116
4. ЗАДАЧИ НА УСЛОВНЫЙ
ЭКСТРЕМУМ
Это позволяет переписать целевой функционал
(4.29) в инте-
гральной форме:
$
+ ЧЕТ(у(2)) 4.
Ву] = ] [ууу + 7)
(4.31)
а
Видим, что задача, Больца (4.29), (4.3), (4.30) эквивалентна, задаче Лагранжа для функционала (4.31) с теми же условиями
связи и краевыми условиями.
Опираясь на эту эквивалентность, докажем следующее утверждение.
Теорема 4.4. Если допустимая функция у* (т) Е СТ (а,
В”)
доставляет экстремум функционалу (4.29) с дифференциальными связями (4.3) и краевыми условиями (4.30), то существует
система из А функций А1 (7), ..., Ак(2), при которых 9*(1) удовлетворяет
системе уравнений Эйлера
,
а,
деи Ри
где
=0,
з=Ьм,
р
Г=У- У) А;9; — лагранжиан задачи (4.3), (4.29), (4.30), и
1
условиям
трансверсальности
1
Та
=В
< Пусть вектор-функция 1* (5) есть точка экстремума в зал
даче Больца (4.29), (4.3), (4.30). Тогда эта функция является
точкой экстремума и в задаче Лагранжа (4.31), (4.3), (4.30).
Применим к задаче Лагранжа теорему 4.1.
Согласно этой
теореме, найдутся такие функции А, (1), 1 = 1, К, что у*(2) явля-
ется точкой экстремума для вспомогательного функционала
В
ь
Ш=
[ (+
а
Ти)
ра
а
тие)
(4.32)
4.6. Задача Больца и задача Майера
где
[=}-+ У. А;9;.
1-1
Запишем
систему
117
уравнений
Эйлера
для
функционала (4.32):
а
„
м
—
.
(и
где
=0,
тт
Ту .
=,
(и))
4
Преобразуем уравнения этой системы.
и й
ЕЕ, + Ти
ит4
*
(и
Здесь при вычислении (} И
=
(4.33)
Имеем
+Т,,
1=Ъп
(4.34)
использовано равенство
Й
а
и
,
р
9=Г(и(2)) = Хоть:
Выражения для (} у:1 и (1 ый ‚ подставим в уравнения системы (4.33):
которые в совокупности с дифференциальными связями (4.3)
составляют систему из п
К уравнений относительно в +
неизвестных функций (2), =Т,
п, и А; (2), 3 =1, К. Остается
записать условия трансверсальности на правом конце. Так как
Ь известно, а меняться может лишь значение ($), приходим к
задаче с естественными краевыми условиями (см. 3.1)
(1)
Учитывая
=
= 0.
(4.34), получаем
Ру1 я
Т., ди
Па
=—_ 1, п
>
р
(4.36)
118
4. ЗАДАЧИ НА УСЛОВНЫЙ
Замечание
ЭКСТРЕМУМ
4.2. Для функционала вида
|
В = ] Ноу]
+ Ту)
в случае фиксированного отрезка [а, 6] и произвольных значсний (а) и (5) (концы экстремали скользят по гиперилоскостям
т=ЕЗИхТЕЬ) к условиям трансверсальности на, правом
конце, т.е. при 5 = 5, в теореме 4.4 следует добавить и условия
трансверсальности на, левом конце:
=1, м.
(4.37)
Замечание 4.3. Если в функционале (4.29) отсутствует
интегральное слагаемое (т.е. рассматривается задача, Майера),
то лагранжиан Г в теореме 4.4 имеет вид Г = У) А;9;.
1=1
Пример 4.4. Найдем экстремали функционала,
в классе функций С1,2].
Это элементарная задача Больца без условий связи и краевых условий. В этом случае функция Лагранжа совпадает с интегралитюм целевого функционала, и имеет вид
=} =а?(у’)?.
Запишем для заданного функционала, уравнение Эйлера:
откуда 252’ =С
= сопзё. Из этого уравнения получим
У
=
2’
Вопросы и задачи
119
где С\ — произвольная постоянная. Решая последнее уравнение
и учитывая, что хе [1,2], получаем общее решение уравнения
Эйлера:
(4.38)
+ С.
И=
Чтобы определить постоянные С1 и С5, используем условия
трансверсальности (4.36) и (4.37):
257!
22|
=
2»
| =—2.
Подставляя в эти уравнения представление (4.38) и решая систему относительно С1 и Сэ, получаем Сл = 1, С2 = 1/2.
Таким образом, рассматриваемый функционал имеет единственную экстремаль
Вопросы
4.1.
Определите
стигаться
гладкис
и задачи
функции,
экстремум функционала
задачах:
п/2
на которых
в следующих
может
до-
вариационных
120
4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Вопросы и задачи
121
4.2. Найдите гсодезичоеские линии кругового цилиндра радиуса А.
4.3. Найдите кратчайшее расстояние между двумя точками
А(0, 2, 4) и В(-1, УЗ, 2) на круговом цилиндре, ось которого
совпадает с одной из координатных осей.
4.4. Для следующих вариационных задач
которому они относятся, и запишите полную
димых устои экстремума функционала:
укажите тип, к
систему необхо-
и- ле 42+ Ту] > екы, вв) =0,1=ТЕ
(Е<п),
б)
в)
уа=у,
Пу
—
лем)
у)
=
у,
Ту)
а,
42
Ь,
+7]
р
ав
Ту
=
у=(и,
(а)
(и...
—? ехи,
..., 95) фиксированы;
—ех,
.?
и)
9; (2, у’) —
0,
1 —
1, К,
фиксированы;
9 (ту, у’)
=
0,
И) = 1,6
(® < п),
а,
Ь фиксированы.
$ =:
4.5. Найдите экстремали следующих функционалов, определенных на множестве гладких функций:
а) Пу] = ] (у) +у)4а-у(а),
уф
би = [+037
т
0
1
=
/(&%
о
2) ат — 2361.у(1);
122
4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
З
г) Пи] = Дао
+
(0) — 8(3);
0
=/2
д) ПИ = у’
-г)ш+т0-у(5) + (5).
0
4.6. Обобщить
на случай
вых
утверждение и доказательство теоремы 4.2
функционала,
ограничениях.
зависящего
от % функций
при А фазо-
5. ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
Необходимое условие экстремума функционала состоит в
том, что первая вариация этого функционала обращается в
нуль. Это обобщает необходимое условие экстремума функции
многих
(в том числе одного)
экстремума
дении
функции
второго
переменных.
Достаточное условие
многих переменных
дифференциала
функции
базирустся
Аналогичная ситуация и в вариационном исчислении:
ся понятие второй вариации, обобщающее понятие
дифференциала,
достаточные
условия
на повс-
в исследуемой
экстремума
точке.
вводитвторого
строятся
на
поведении этой вариации вблизи исследуемой экстремали.
Напомним, что в вариационном исчислении различают сильный экстремум, при котором рассматриваются произвольные
непрерывные функции, и слабый экстремум, который формулируется в классе непрерывно дифференцируемых функций.
5.1. Слабый
Квадратичный
бражсенис
экстремум
функционал
{: Е? -› В
которос
и вторая
каждой
паре
вариация.
линейного пространства, № ставит в соответствие
называют
по
билинейной
каждому
аргумснту,
выполняются
формой,
т.с.
если
для
число } (1,9),
это отображение
любых
Ото-
х и у элементов
значений
линейно
аргументов
равенства,
(отл
Иру ацу
+ ооо,у) = о (т, у) + 05} (22,9),
- а2у2) =
1 (ут)
+ аа} (5,2).
В функциональном анализе, изучающем бесконечномерные линейныс пространства, и, в частности, в вариапионном исчислении билинейные формы принято называть билинейными
124
5.
ЛОСТАТОЧНЫЕ
функционалами.
равнять
ЭКСТРЕМУМА
Если в билинейном функционале Л[у,2] при-
аргументы,
линейном
УСЛОВИЯ
мы
пространствс,
функционалом.
получим
которую
функцию
называют
Квадратичный
С[у| = ЛДу,у|
на
квадратичным
функционал
С]у|
поло-
жительно определен, если СУ] > 0 при любом у 22 0 и неотрицательно определен, если Су] > 0 при любом у = 0.
Пример 5.1. В линейном пространстве С[а, 5] для любой
непрерывной на, отрезке [а, | функции А(5) функционал
ь
Лу,=] = ] А(х)у(х)2(х)ах
является билинейным,
а функционал
ф
си =Дия= ] А(е) (ие)?аа
является квадратичным. Функционал С[у| положительно определен, если А(х) > 0 на отрезке (а, 6].
Пример
5.2. В линейном пространстве С\[а,6] функционал
р
сы = | (Абу ово
+ Си)
а
где А, В, С — непрерывные функции, является квадратичным,
так как он соотвстствуст билинсйному функционалу
ь
Лу, 2] = | (аадяч
вай
у) + ову 2) 4х.
а
Говорят,
что функционал
ром нормированном
ем
в
точке
Лу], определенный на, некото-
пространстве,
у, если
дважды
его приращение
дифференциру-
А./ = Лу-+ 84| - Лу
5.1. Слабый экстремум
представимо
в
125
виде
д. = 6Лу,69] + 85° Лу,бу] +06),
(5.1)
где 92.Ду, бу] — квадратичный функционал по переменной ду,
называемый второй вариацией функционала Лу] в точке
уз а 0(||6[^)/ [6—0 при ду —> 0.
Если представление (5.1) для функционала Лу] существует,
то оно единственно
однозначно.
Теорема
и, значит,
5.1.
Если
вторая
функционал
вариация
[у]
определена
в точке у дважды
дифференцирусм и имеет минимум (максимум), то д°Лу, бу 20
(5°Лчу, 69] < 0) при любом ду.
ч Доказательство теоремы проведем лишь в случае минимума,
так
как
для
случая
максимума
доказательство
аналогично.
Если функция у является точкой минимума функционала,
Лу], то, согласно необходимому условию эвстремума функционала, на, функции у первая вариация функционала, равна, нулю:
6.Лу,6у] =0.
Поэтому
вид
представление
(5.1) в этой точке имеет
АЛ Ду,ви +0 (|8) > 0.
Зафиксируем вариацию д и рассмотрим приращение функционала, соответствующее вариации у, где
положительное
число. Для этого приращения верно неравенство
9? Лу. 1бу] + о (|6?) = 262.Ди,
бу + о( [би*) > 0,
или
_
Льву
я
[бу
Первое
слагаемое
то время
сделано
любого
как
менее
[29|
в последнем
второе
выбором
наперед
.
‚ов
неравенстве
досточно
заданного
= > 0
5 2 ЛузбИй >
[1]
2
числа
не зависит от &, в
малого
= > 0.
$ может
Значит,
быть
для
126
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
откуда следует, что
62 Л[у,6у]
[бу
20
92 Лу,в
> 0.
Так как бу можно выбирать произвольно, заключаем, что квадратичный
функционал
6?.Лу,бу]
неотрицательно
определен:
9°.Лу,
69] > 0. >
Замечание 5.1. Неотрицательная определенность второй
вариации является условием необходимым, но нс достаточным
для экстремума функционала. Это всрно дажс в случае функ-
ций одного переменного [1].
Говорят,
что
квадратичный
функционал
ленный в нормированном пространстве,
Су],
сильно
опреде-
положите-
лен, если можно указать такое число К’ > 0, что для любого у
выполняется неравенство С [у] > К ||". В конечномерном случас квадратичный
ную
форму,
ционала,
функционал представляет
а сильная
равносильна,
положительность
его
положительной
собой квадратич-
квадратичного
функ-
определенности
(в
ка:
честве К можно взять наименьшее из собственных значений
матрицы квадратичной формы}. Но в бесконечномерном случае это уже не так.
Теорема
ционала
первая
этой
5.2.
[у],
у дважды
определенного
вариация
точке
Если
в точке
сильно
дифференцируемого
в нормированном
у*
равна
положительна,
нулю,
пространстве,
а вторая
то функционал
функ-
вариация
Л[у|
имеет
точке у* минимум.
Обсудим приведенные результаты в случае простейшей
задачи варцационного исчисления. Вычислим вторую вариацию
функционала,
ь
ЛИ=
||
а
Кольу)а,
в
в
5.1. Слабый экстремум
127
заданного на множестве функций уЕ С'[а.6], удовлетворяющих
краевым условиям у(а) = ут, у(5) = у2. Вариация функции ду для
такого функционала, удовлетворяет однородным краевым условиям ду(а) = 9у(5) =0.
„Лу
является
дважды
Считаем, что интегрант } функционала
непрерывно
дифференцируемой
функци-
ей. Тогда, согласно формуле Тейлора, имеем
ГИ]
Ли
- Ли = |[ (були)
а
ь
1
+5
/|
и
(6)?
Н2Лиибуду’
Ли
(6)?
ат
о(|ву
г ),
(5.2)
а
где о(|би[сл)/ 16 — 0 при [бел — 0.
Представление
(5.2) показывает, что
ь
1
6 Лу,бу = 5 |
.
.
и (6)? + 2Л„дубу + Ли (6?) 4х.
(5.3)
а
Используя интегрирование по частям и краевые условия для
вариации ду, получаем
ь
эми
‚4((6)?)
=
а
= (
‚
(6у)?)
и
(сель) буь
что позволяет записать соотношение
= -
(= Ли (бу)? 4х,
(5.3) в следующем виде:
|)
Ди, — ] (бу? + Роу),
(5.4)
128
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
где
4
и
а=(л чу р
ии).
Р=5
1
и
уу
Замечание 5.2. Если мала функция ду’, то мала и бу, так
как, с учетом краевого условия ду(а) = 0,
2) -
[мо
[Е
и, в силу теоремы об оценке интеграла,
Я
|бу(+)| < вы
@ < шах 1ву (+) [6 — а).
а
Обратное неверно, так как малость функции не означает, что
мала производная (пример: #(1) = =зщ(1/=)). Это говорит о
том, что в представлении (5.4) второй вариации основную роль
играет слагаемое Р(бу’)?. Знак второй вариации зависит от
знака указанного слагаемого.
Теорема
5.3. Если квадратичный функционал
=
Ь
] (О? + Ра!) аш,
а
заданный на линейном пространстве функций й = Са, 6], Удо
влетворяющих
однородным
краевым
условиям
(а)
= (65)
=
неотрицательно определен, а функция Р непрерывна, то Р(х о >
> 0 всюду на отрезке [а, 6].
4 Предположим,
что непрерывная функция Р(1) не является
неотрицательной на всем отрезке
[а, 6]. Тогда можно выбрать
точку 20 © (а, Ь) и некоторую ее окрестность (50 — т, хо + т) Е
Е (а, $], в которой выполняется неравенство Р(5) < Р(10)/2 < 0.
5.1. Слабый экстремум
129
Если функция й Е Са, ] тождественно не равна нулю, но равна
нулю вне интервала, (10 — т, хо + т), то
6
] Ра аз < 0,
а
так как функция /’ непрерывна и отлична от нуля хотя бы в
одной точке. Выберем функцию р указанного типа так, чтобы
этот интеграл оставался отрицательным, а первое слагаемое
У
01? в подынтегральном выра|
№)
жении функционала, С[1] давало
как
можно
Пусть
меныший
#’(2) =1
интеграл.
О
при 10 + 9/3 <
<х<10+248/3 при общем ограничении |1'(5)| < 1 (рис. 5.1).
Рис. 5.1
Тогда,
еЫ
О
о
а
О
0—8
то
то—д
об
ь
”
т
оби
а
< ]
О? ах <8М83,
0—9
где М — максимальное значение функции () на отрезкс [а, 6].
Но в то же время
Ь
то-+б
река = ] Ра)? ас <
а
0-6
20-+24/3
<
]
хо-+0/3
20+26/3
Р(=) (в)? ав <
]
жо-+6/3
Ро 4: = —С5,
130
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
где С =-П(то)/6 > 0 не зависит от д. В результате получаем,
что @[№]
< -С9+8М53.
Нетрудно увидеть, что независимо от
значений
М и С при достаточно малом 6 будет выполняться не-
равенство С] < 0, которое противоречит условию теоремы. №
Теорема 5.4. Если функционал Л[у| в простейшей задаче
вариационного исчисления достигает на функции у(т) минимума, то выполняется условие Лежандра
Лил (2.м(е),у (т)
> 0.
(5.5)
ч Согласно теореме 5.1, для точки экстремума у выполняется
соотношение
6?.Л[у,бу] > 0, которое в силу представления
(5.4)
можно записать в виде
ь
(ебу +Р(бу)?) ат > 0.
а
Согласно теореме 5.3, Р(т) > 0 всюду на отрезке [а, 6]. Учитывая вид функции Р(5), получаем (5.5). »
Итак, при исследовании функционала, на экстремум важней-
шую роль играет поведение его второй вариации, являющейся квадратичным функционалом. Рассмотрим квадратичный
функционал (5.4) на функциях й, для которых №(а) =1(6) =
= 0. Как было показано, необходимым условием неотрипцатель-
ной определенности этого функционала, является неравенство
2(%) 20, хЕ[а,6..
Запишем
купности
с
для функционала
краевыми
(5.4) уравнение
условиями
получим
Эйлера.
краевую
В сово-
задачлу
для
обыкновенного дифференциального уравнения:
(РИ)
—@В=0,
На) =)
Эта задача, имеет очевидное решение
ствовать и нетривиальные решения.
=0.
(5.6)
1(5) = 0, но могут суще-
5.1. Слабый экстремум
131
Рассмотрим ненулевое решенис #(х) красвой задачи (5.6).
Если точка 2 Е (а, 6] такова, что #(2) = 0, в то время как #(х) = 0
при
а<т< 1%, то точку # назовем сопряженной точке а.
Итак, точки а и 6 сопряженные, если краевая задача (5.6) имеет
решение, не обрашающееся в нуль на (а,6).
Отсутствие на
полуинтервале (а, 6] точек, сопряженных точке а, означаст, что
задача, (5.6) не имеет ненулевых решений.
Теорема 5.5. Пусть функции Р(5) и 0(2) непрерывны на
отрезке [а, 6] и Р(5) > 0,
Е [а, 6]. Тогда для положительной
определенности функционала,
|
Гав
+ Р(в’)?) аз,
опредоленного на, множестве функций й Е С'[а,5], для которых
в (а) =1 (5) =0, необходимо и достаточно, чтобы на этом отрез-
ке не было точек, сопряженных точке а.
#
Итак, чтобы проверить квадратичный функционал на положительную определенность, нужно исследовать краевую задачу
(5.6) и выяснить,
имеет ли она нетривиальные
решения.
От-
сутствие нетривиальных решений означает, что квадратичный
функционал
положительно
опредслсн.
Вернемся к простейшей задаче вариационного исчисления
|
Ли-=
| Ге)
у(а) = у»
УЪ)=уь
(5.7)
где /
дважды дифференпируемая функция; уе СЧа, 6. После выявления функций, удовлетворяющих необходимому условию экстремума функционала, т.е. экстремалей, дальнейшее
исследование этих функций связано с анализом на них второй
вариации
Ь
Я.Дььби = | (@бу? + ви),
(58)
132
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ
ЭКСТРЕМУМА
являющейся квадратичным функционалом.
РЕРФ =
Здесь
(в),
9= 94) = 5 (елке) (а)) _- мене).
Уравнение Эйлера
и (РбУ) — 96 =0
квадратичного функционала 62 Л[у,
бу] (5.8) называют уравнением Якоби исходного функционала,
[у] задачи (5.7). Точку
ЕЕ (а,5) называют сопряженной точке а в смысле функционала Л[у|, если эта точка является сопряженной точке @ в смысле
квадратичного функционала 9?.Лу, бу).
Теорема 5.6 (достаточные условия слабого минимума)Функция уе С'[а,В] доставляет слабый экстремум
функционалу Лу в простейшей задаче вариационного исчисле-
ния (5.7), если одновременно выполняются условия:
1) функция у(7) является экстремалью функционала,
2) для этой функции выполняется усиленное
[у];
условие Ле-
жандра
Р(т) =
и
(2, ут).
())
>0,
тЕ
(а, ь):
3) на интервале (а,5) нет точек, сопряженных точке а в
смысле функционала /[у| (усиленное условие Якоби).
#
ЧФункционалы от нескольких функций.
Все сказанное выше естественным образом переносится на, общий случай
функционалов, зависящих от нескольких функций. На линейном пространстве С1([а,
], В”) непрерывно дифференцируемых
вектор-функций рассмотрим функционал
[р
Ли = ] Ка),
(6.9)
5.1. Слабый экстремум
где
функция
}
дважды
непрерывно
= (91 (2), у2(т), ..., У(т)).
133
дифференцирусма;
(5)
=
Если прирашение АЛ/у, бу] рас-
сматриваемого функционала /[у|], соответствующее вариации
функции бу = (бут, ..., би}, имеет вид
А.Лу, бу] = Ди+ 6] - Ли =5Лу, бу] + 9 Ду,6 + о (66),
где (Лу, бу] — квадратичный функционал на пространстве
всктор-функций ду, то функционал Л[у| будсм называть дважды дифференцируемым, а функционал д°/[у,5у|] — второй
вариацией функционала /[у] в точке у.
При фиксированных концах вариация ду должна, удовлетворять условиям бу(а) = 9у(6) =0.
Будем также считать, что
интегрант
{ является
дважды
дифференцируемой
функцией.
Используя, как и в одномерном случае, формулу Тейлора,
получаем выражение для второй вариации функционала:
ь
Лу,би — 5 [ (блиьвыт +2 Льву" + бу Лим (бут) а
а
где Фу
Луи»
ру — Матрицы Гессе интегранта }, отвечающие
соответствующим переменным.
Как и в одномерном случае, можно примснить
интегрирования по частям. В результате получим
правило
И
Ду, бу = Г бу'Р(бу') )`+6у0ду°) ат,
(5.10)
где
НЫ»
Ч-5(ль- р).
В общем случае основную роль во второй вариации также
с
т
и
играет слагаемое ду’Р(%у’).
Запишем систему уравнений
134
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ
ЭКСТРЕМУМА
Эйлера для квадратичного функционала, используя матричную
запись:
— (Р(в’)") - дв’ =0
(5.11)
(в правой части уравнения стоит нулевой столбец соответству-
ющей высоты).
Систему
(5.11) называют
системой
Якоби
функционала Л[у].
При фиксированной вектор-функции у элементы матриц Р
и О в представлении (5.10) зависят только от т, так как они
не зависят от компонент вектор-функции ду. Поэтому система,
Якоби (5.11) — это система линейных дифференциальных уравнений
порядка
не
выше
двух
функции Ё, удовлетворяющая
относительно
компонент
вектор-
теореме существования и сдин-
ственности в каждой точке х, для которой
4её Р(х) =
0.
Рассмотрим решения В; системы (5.11), удовлетворяющие
начальным условиям В; (а) = 0, №’(а) =е,, где ег, е2, ..., ‚ @п —
стандартный базис в ® (т.е. у вектора е; отлична от нуля
лишь 1-я компонента, которая равна единице). Значения этих
решений в точке х линейно независимы, если эта точка, доста»
т
точно близка к точке а, т.е. А» (2) = Че (В1(х), ..., В, (2)) 50.
Здесь использована, блочная структура записи:
вл (т)
(2)
где
р;
=
(Ат,
р.:2,
В11(5)
#12(5)
...
ип (7)
#21 (2)
122(1)
...
Йэт(т)
Ви (=) Внз(#) ... №)
+:
Вт).
Если точка 2 такова, что Ар (2) = 0, в то время как Ал (т) =0
при а <<,
то точку # назовем сопряженной точке а в
смысле функционала [9].
Достаточные условия скалярного случая без изменений обобшаются на векторный случай.
5.2. Условие Якоби
Теорема
135
5.7. Пусть функционал
[2
Ли = ] Кез,
где
/ —
дважды
непрерывно
дифференцирусмая
определен на множестве вектор-функций
уЕС"([а,
функция,
В"), удо-
влетворяющих краевым условиям
у(а)=и,
у
=у2.
Функция * доставляст минимум функционалу [у], ссли одно-
временно выполняются условия:
1} функция у* является экстремалью функционала, [у];
2) функция у“ удовлетворяет усиленному условию Лежандра
Лии (тие),
(т.с. матрица
Фи
(=)) >0,
положительно
Е
(а, 6)
опредолсна
при указанных
значениях 2);
3) отрезок [а, 6] не содержит точек, сопряженных точке а в
смысле функцонала Лу].
5.2. Условие
Рассмотрим
Якоби
функционал
Ги
ЛУ = ] (ел)ау
с дважды непрерывно дифференцируемым интегрантом },
определенный на линейном пространстве С'[а,6]. Если функционал „/[у], не является вырожденным, множество его экстремалей, проходящих через фиксированную точку (а, ув), образуст
однопарамстрическос семейство, при этом в качестве парамстра можно взять угол наклона экстремали в точке (а, уз). Если
136
5. ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
это ссмейство заполняст сплошь нокоторую область РС В?,
причем через каждую точку области Г) проходит ровно одна
экстремаль, то мы будем говорить, что в области О задано
поле экстремалей.
Поле экстремалей, заданное в области Г), позволяет в этой
области определить функцию р(т,у), значением которой являстся значение тангенса угла наклона экстремали в точкс (5, у),
т.е. р(х,у) есть производная той экстремали (4), значение которой в точке д равно у. Функцию р(х,у) называют наклоном
поля экстремалей.
Рассмотрим экстремаль у*(1), которая проходит через точку (а, ув). Будем говорить, что эта экстремаль включена в поле экстремалей на отрезкс [а, В], ссли можно ука-
у
зать такую область РС Е?, ко_
РУ
торая
и, |--|
р
(9)
содержит
ции 1/* (2), те
график
функ-
(а, 6], и в которой
можно задать поле экстремалей
а
х
рассматриваемого
Рис. 5.2
Теорема
функционала,
(рис. 5.2).
5.8
(условие
Якоби).
Для того чтобы экстре-
маль у*(7) функционала Л[у| можно было включить на отрезке
[@, 6] в поле экстремалей, достаточно, чтобы на интервале (а, 6)
не было
точек,
сопряженных
точке
а в смысле
функциона-
ла Лу.
Напомним,
что
отсутствие
точек,
сопряженных
точкс
а,
равносильно отсутствию у краевой задачи (5.6) нетривиальных
решений.
Пример 5.3.
Проверим выполнение условия Якоби
экстремалей функционала, /[у] в вариационной задаче
[2
Ли = [ (2—2) 4
о
ехы, (0) =0, у =.
для
5.2. Условие Якоби
Уравнение
Эйлера
вид
рассматривасмого
137
функционала
имсет
чу) (2) =0
р
У
Уч,
или у’ -у=0.
Единственным решением этого уравнения,
удовлетворяющим поставленным краевым условиям, является
функция (5) =0.
Вычисляем
коэффициенты
Р(5)
и О(5)
для
второй вариации функционала:
1
1
4
©) — (Ли
жи)
=1
Краевая задача
имсет вид
(5.6)
для
уравнения
Якоби
в данном
случае
МАО,
в(0) =0,
1№(2)=0,
где фе (0,6.
Обшее решение обыкновенного дифференциального уравнения в краевой задаче имеет вид
й (1) = Си совх + Созшх.
Из краевого условия #(0) = 0 находим С1 =0. А второе краевое
условие приводит к уравнению Со
= 0, или, так как #(т)
должно быть нстривиальным, зш# = 0.
Полученное уравнение имеет решения 1 = бл, & Е №. Поставленная краевая задача не будет иметь нетривиальных решений,
ссли
ни одно
из значений
Кл
нс попадет
на промежуток
(0, В], т.е. при 6 < мл. Таким образом, условие Якоби для рассматриваемого функционала выполнено, если 6 < л, и не выполнено
при
> т. При Ь < л экстремаль у*(х} =0 включается в поле
экстремалей у(1, Сэ) = Созшх на отрезке [0, 6].
Обратим внимание на то, что экстремаль у*(х) = 0 достал
вляет слабый минимум функционалу в рассматриваемой задаче,
так как выполняются все условия теоремы 5.6.
138
5.
ЛОСТАТОЧНЫЕ
УСЛОВИЯ
5.3. Инвариантный
ЭКСТРЕМУМА
интеграл
Гильберта
Пусть в простейшей задаче варцационного исчисления (5.7)
экстремаль у (т) © СЦа,6] включается в поле экстремалей,
определенное в нскоторой области О. Тогда в О определена
функция р(т,у)
наклона
поля экстремалей.
Выберем
такую
допустимую функцию у(х), график которой, за исключением
начальной точки (@, ул), попадаст в область Г). Интеграл
[2
| Пеолкоуеуфь
задающий значение функционала /[у| рассматриваемой варцационной задачи на функции у(7), можно интерпретировать как
криволинейный интеграл
] /(т,у, у’) ат,
Г(у)
вычисляемый
вдоль кривой
Г(у), которая
параметрически
за-
писывается в виде
т=Ь
(5.12)
у= у(8),
У=У(.
Поэтому приращение А.Лу*,6у] функционала Л[у] можно записать как разность криволинейных интегралов, соответствующих функциям 1/*
иу=у* + ду:
АЛу’.6 = [ (ту
у) 4 —
гы)
[ (ту
у) ат.
гу")
Криволинсиный интеграл
@(у) = ] В (тиуьр(тьу)) + (и — рту) Л, О]
Г(у)
т,
5.3. Инвариантный интеграл Гильберта
139
где кривая Г(у) соответствует функции у(2), график которой
попадает в область О, называют инвариантным интегралом Гильберта.
Учитывая специфику кривой Г(у), которая параметрически
описывается системой (5.12), подынтегральное выражение интеграла Гильберта, можно преобразовать следующим образом:
ы (т, у.р(т,у)) + (у — рву) Л (ву)
|4 =
= В (тузр(т,у)) — рву)Л, (вре)
+
Ли
(1,
у,5(2,9))
ау
—
В(т,у)
|4 +
4х
+
@
(т.ч)
ау,
где
В(х,у)
=
/(еьр(е,у))
(т,
у)
=
— рву),
Лу (ур,
(2, у,р(т.у)),
у)).
Поэтому инвариантный интеграл Гильберта равен:
с) - || полдаг+ ое
(5.13)
Г(у)
Но в этой форме в интеграл не входит третья координата у.
Значит, его можно рассматривать как криволинейный интеграл в плоскости хОу, взятый вдоль графика Го(у} функции
у(т):
(у) = ] В(т,у) ат + Ч(т,у) ау.
(5.14)
Го(у)
Отметим, что интеграл Гильберта, взятый вдоль экстремали, совпадает со значением функционала на, этой экстремали:
г(*)
|
|
- [| ле-издае = | Кол одлуудуа = ЛР}
г(у*)
а
так как р(т,у) = (4*)'(х) на кривой Г(у*).
140
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
Оказывается, что интеграл (5.14), как и (5.13), нс зависит от пути интегрирования, т.е. подынтегральное выражение
является полным дифференциалом. Действительно, область О,
охватываюшую график экстремали 9*(7)}. можно считать односвязной. Поэтому подынтегральное выражение В(.у) ах +
+ 9(т,у)4у будет полным дифференциалом,
Убедимся
в выполнении
этого равенства
если В, — ©, = 0.
в каждой
точке
обла-
сти О. Имеем
— 9 = А+ Лиру — вый - Ру +
Ли
Предполагая,
раскросм
„р;
ах
,—
Ди
что функционал
уравнение
а
=
ие
Эйлера
— Лу Р—
ив, —
Ли
(р, + Рру).
„|у| нс является
(5.15)
вырожденны,и,
этого функционала:
Лиь Е АшУ Е Лиру' — Л =0.
(5.16)
Отметим, что
р(т,у(т)) = (2)
для экстремали
(5),
откуда,
(5.17)
дифференцируя,
РУ
получаем
(5.18)
=".
Соотношения (5.17) и (5.18) позволяют исключить из уравнения
(5.16) производные у’иу”:
ив
Полученное
Лир + Лии (р + Рур) — Л» =0.
уравнение
в
совокупности
с
(5.15)
приводит
к
тождеству П, — 0, =0.
5.4. Сильный
экстремум
Итак, если в области 2 задано поле экстремалей, то инвариантный интеграл Гильберта не зависит от кривой, соединяющей в Р точки (а, Ус} и (6, %), а на экстремомли у = у*(т),
5.4. Сильный экстремум
141
включенной в это поле, совпадает со значением функционала
Ли]. Значит, изучая приращение функционала, соответствующес вариации ду, можно заменить значение функционала, на
экстремали значением интеграла, Гильберта, взятого вдоль графика функции у = у" + ду (если ду достаточно мало по норме
|- с, то эта функция попадает в область О, в которой определено поле экстремалей). В результате получаем
АЛии-Ли-Ли-
|
ель
Г(у)
=
] (ву) аз =
Г(у*)
оу) )4—а(у) = | Ле)
Г(у)
41 — @(у) =
Г(у)
=
|
(ель)
—
Лель)
—
(У
-РЛиельр))
ат.
г
Функцию
Е(туьрьу) = 1 (уу) — У(туьр)— (и - РЛ (в, уьр),
являющуюся подынтегральной для последнего интеграла, называют функцией Вейериитрасса. С помощью этой функции
приращение функционала можно записать следующим образом:
Лу’, бу = ] вбьмиеду у) 4
Г(у)
гдеу=у* +6у.
Отметим, что приу=у* (2), у = (у* (2))' (короче
говоря, на экстремали) функция Вейерштрасса равна нулю, так
как при этом р(+,у*(4)) = (у* (#))".
Функция Вейерштрасса, позволяет анализировать приращение функционала.
данной
функции
Если Е(х,у,р,у’) > 0 в окрестности графика
1/*(2),
то эта функция
—
точка минимума
142
5.
ЛОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
функционала. Если же Е(т,у.р,у’) < 0 в окрестности графика,
данной функции у*(1), то у*(х) — точка максимума, функционала.
Функция Вейеригтрасса оказывается весьма, эффективным
инструментом исследования конкретных функций на, экстремум для данного функционала. При этом такое исследование
возможно с точки зрения как сильного эвкстремума, так и сла60го экстремума.
При исследовании на слабый экстремум
фиксированной функции у*(5) необходимо проверить на знак
функцию Вейерштрасса в точках, близких к точкам кривой
Г(у*).
т.е. определять
знак
Ё(т,у,р(т.у),у)
для
таких
троек
(т, у, у’), которые близки к тройке чисел (т, у*(т), (/“)'(т)).
Если в таких точках (т, у.р(т.у),
у’) сохраняст знак, то функция у*(2) — слабый экстремум.
При исследовании вопроса, является ли функция у*(т) точкой сильного экстремума функционала, изучают знак функции
Вейерштрасса для таких троек (т, у, у’), для которых у близко
к у*(1). Функция Вейсерштрасса должна сохранять свой знак
при любых изменсниях аргумента у’, так как всличина у'(5) нс
влияет на степень близости функций /* (т) иу(х) по норме |||с.
Известно*, что если функция Вейеригтрасса,
будучи непре-
рывной, в каких-либо точках (т, у*(т), р(х,у*(т)), у’) меняет
знак, т.е. при некоторых значениях у’ она положительна, а
при некоторых значениях отрицательна, то у*(5) не являстся
точкой экстремума функционала. Если такое изменение знака приходится на точки (т, у*(5), р(х,у*(т)), (у*)’(2)}, т.е. на,
точки графика исследуемой функции, то эта функция не доставляет и слабый экстремум.
5.4. Исследуем на экстремум функционал
=
Пример
*См., например:
Гельфанд
И.М.,
Фомин
С.В.
5.4. Сильный экстремум
143
определенный на множестве функций уЕ С'[0,6], удовлетворяющих краевым условиям (0) = 0, у(5) =чь (> 0,
%>0).
Уравнение Эйлера исследуемого функционала У[у| имеет
вид (3(и’)?)' =0, или уу” =0.
Оно распадается на два дифференциальных уравнения у’ =0 и у” =0, которые несложно
решить.
Общее
у = С1х- С>.
решение
Выбрав
уравнения
можно
среди экстремалей
записать
в виде
те, которые
удовле-
творяют левому краевому условию 9(0) = 0. получим однопараметрическое семейство у(х,С')} = Сх функций, среди которых
единственная функция * (1) = (уь/6)х удовлетворяет и правому
краевому условию.
Выясним, является ли функция \/* (5) точкой экстремума для
функционала, /[у]. Отметим, что эта функция включается в поле экстремалей, так как через любую точку (т, у) из первого
квадранта плоскости проходит единственная экстремаль семейства
у= Сл.
В качестве
области
0,
в которой
экстремалей, можно взять область {(5, у):
задано
поле
> 0, у>0}.
Через точку (2, 9) из области 2 проходит экстремаль (5) =
= (1/Т)т, для которой у’(2) =7/1. Значит, функция наклона
поля экстремалей имеет вид р(т,у) =у/х. Составим функцию
Вейерштрасса, учитывая вид иитегранта (к, у,у’) = (3:
Е(туурьу) = (ууу) — А(туьр) — (У — р), (фур) =
= (9)
(ур) (3?) = (у-р (У -+ур+р”- 3) =
= (ив)(+ 2р).
Первый
сомножитель
(у’- р)? в функции Вейерштрасса
на
знак не влияет, так что нужно проверить на, знак функцию
фу) =у + 2р(т,у) =У +2/т.
На исследуемой функции
у = (у/Ъ)5 имосм ф(,у, у’) = (уь/Ъ) + 2(ь/5) > 0. Это же неравенство сохранястся и в ближайшей окрестности графика этой
функции, например, при у >0иу’ > 0. Значит, функция у* (5)
доставляет функционалу слабый экстремум. В то же время
видно, что, каковы бы ни были х и у, выбором переменного
144
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
у’ функции Вейерштрасса можно придать как положительное,
так и отрицательное значение. Следовательно, функция у*(5)
нс является точкой сильного экстремума функционала, Лу].
3
Приведенный
пример
достаточно
прост,
и исследование
функции Вейерштрасса не потребовало особых усилии.
В более
сложных случаях задача, исследования функции Вейерштрасса,
может оказаться не такой элементарной.
Тогда, могут быть по-
лезны другие, более простые достаточные условия, из которых
вытекает знакопостоянство функции Вейерштрасса.
Если функция }(1,у.у’) дважды непрерывно дифференцируема, то к ней можно применить формулу Тейлора
/_\2
Ау.)
= Т(тьу,р)+ (у — р) (и, в
гдеа=р-+ь(у — р),
0<и<1.
Е(т, Ур; у)
уч (2.9.9),
Значит,
У= ии
2
.
уни (2.9.9),
и знак функции Вейерштрасса определяется величиной /и„ в
некоторой точке (х,у,9).
Таким образом, если Ли
> 0 всюду в области определения
функции {, то функция Вейериетрасса, сохраняет знак и любая
экстремаль, удовлетворяющая краевым условиям, является точкой сильного экстремума функционала. В более сложных случаях необходимо проверять знак Ли
в таких точках (4, у, у’),
для которых точка (т, у) близка к графику исследуемой ие
ции у*
(т),а у’ произвольно.
Если при указанных условиях Ли”
сохраняет знак, то у*(т) является точкой сильного стремум,
Наконец, если {№ „ сохраняет знак в точках (т, у, у’), близких к
(=, (2), (у*)’ (+), т.е. для функций, близких к у*(5) по норме
то у*(х) будет точкой слабого экстремума функционала.
Условие
(у: >0
или
Ди (е.у.у)<0
5.4. Сильный экстремум
знакопостоянства производной
условием Лежандра.
Пример
Ри
145
называют
усиленным
5.5. Исследуем на экстремум функционал
|
ЛУ -| Уи
4х,
)
определенный на множестве функций у(1) Е С"[0,6], удовлетворяющих краевым условиям 1/(0) = 0, (6) = чь (6, %ь > 0).
Рассматриваесмый функционал отличается лишь постоянным множителем от функционала задачи о брахистолроне (см.
пример 1.2). Его экстремали параметрически задаются в следующем виде (см. пример 2.7):
==
(9-6),
=
у = С1(1- со8 09),
(5.19)
причем, каковы бы ни были значения 6 > О из
> 0, через точ-
ку (5, %) проходит единственная экстремаль (см. пример 2.7).
Это значит, что в области О ={(5, у): >0, у> 0} задано поле
экстремалей, а любая экстремаль рассматриваемого семейства,
оказывастся включенной в это полс.
наклона
аналитическим
выражением
Однако записать функцию
не
но решать трансцендентное уравнение.
усиленное условие Лежандра.
удается,
так
как
нуж-
Но можно проверить
Имеем
Таким образом, единственная функция, которая параметрически задается системой (5.19) и удовлетворяет поставленным
красвым условиям, доставляет сильный минимум рассматривал
смому
функционалу.
146
5.
ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
Вопросы
5.1. Проверьте,
и задачи
выполнено ли условие Якоби для экстремали
функционала
ь
и = [© — 47 + (у?)4,
0
проходящей через точки 4(0, 0} и В(5, 0). Предполагается, что
Ь
(" + 5) т
5.2. Покажите,
что для функционала,
ф
И=
| ем) 4,
а
где { дважды непрерывно дифференцируема; Лии 2 0; у(т) Е
Е С||а.6], каждая экстремаль может быть включена в поле
экстремалей.
5.3. Для следующих функционалов проверьте, включены ли
экстремали, удовлетворяющие заданным краевым условиям, в
поле экстремалей:
(у
и?) 4,
(0) =0, у) =0;
(у)4т, (0) =0, (6) =с (е>0;
>
Ву) /1-+(у)? 4,
(0) = у, у)=
(Ку)
> 0):
Вопросы и задачи
1
в) [и
И
147
о) =0, ИБ = (6>0.
0
5.4. Докажите,
что для функционала,
51/4
Лу] = ] (’- (4
0
при красвых условиях 9(0) = 0, (5")
= 0 экстремаль у(5} =0
нс является точкой экстремума.
5.5. Исследуйте на экстремум следующие функционалы,
определенные на множестве непрерывно дифференцируемых
функций, удовлетворяющих заданным красвым условиям:
а
а) а
+2уу — 16у7) 42,
(0) =0, у(а) =0 (а>0);
0
2
/
(49? — (у +8) ах,
/
у(1-+ 2?) 4т,
у(1)=3, у2) =5;
п/
(0) =-1 ут/А) =0;
Л
г) оу
чик") фе
(0)
= 1/3, и(1)
= (1/3)е?
0
ый и
д) [+ бузова, 310) 0, уу)
) [7 + (и')?— 229)4т, у(0)=0, у(2) =3.
0
148
5. ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
5.6. Исследуйте на экстремум функционал
1
ЛИ = ] (Е?) ав, у0)=о,
Ут
0
в зависимости от значения параметра =.
5.7. Покажите,
что в вариационной задаче
1
и = Ге
—и(у’)?) ат > ехы,
(0) =у(0 =0
р
экстремаль у(1) =0 доставляет слабый минимум функционалу
[у]. Доставляет ли эта экстремаль сильный минимум функционалу Лу?
ЧАСТЬ
П
Оптимальное
управление
Лучшее
—
враг хорошего.
Народная поговорка
6. ВАРИАЦИОННЫЕ МЕТОДЫ
В ОПТИМАЛЬНОМ УПРАВЛЕНИИ
Аппарат классического вариационного исчисления при всей
своей фундаментальности не позволяет найти решения пелого ряда вариационных задач, важных в различных отраслях
техники. Вторая часть книги посвящена, методам решения вариационных задач неклассического типа. Начнем с описания
основных классов таких задач, которые будем называть задачами оптимального управления.
6.1.
1.
Постановка
задачи
Управляемый
оптимального
объектъ
(управляемая
управления
система)
—
это некоторая машина, модель, прибор, процесс, конструкция и
т.п., снабженная „рулями“. Манипулируя „рулями“ (в допустимых пределах, т.е. с учетом имеющихся ресурсов управления),
мы тем самым
вляем
определяем
поведение,
движение
объекта,
упра-
им.
Слово „руль“ взято в кавычки, поскольку под „рулем“ понимается не обязательно устройство, соответствующее общепринятому значению этого слова, а любой фактор, дающий нам
возможность влиять на движение объекта. Так у автомобиля
два „руля“: „баранка“ и акселератор, а ресурсы управления характеризуются максимально возможным углом поворота колес
и мошностью двигателя. Если в качестве управляемого объекта
рассматривать
ческой реакции,
технологический
процесс
проведения
хими-
то роль „рулей“ могут играть состав ингреди-
ентов, количество катализатора, поддерживаемая температура
и другие факторы, от которых зависит течение реакции.
152
6. ВАРИАЦИОННЫЕ
МЕТОЛЫ
Будем считать, что управляемый объект нам дан, так что
известны и ресурсы управления, и закон движения, устанавливающий
для
выбранного
правила
манипулирования
„руля-
ми“ эволюцию состояния объекта. Речь идет только об объектах, движение которых (при заданых начальных условиях)
вполне точно и однозначно определяется выбором положения
„рулей“ в каждый момент времени. Такие объекты называют
детерминированными, при их изучении никакие „случайности“ во внимание не принимаются.
Следует учитывать, что часто наши возможности управлять
ния,
объектом
но
и
тем,
лимитируются
что
в
не только
процессе
ресурсами
движения
объект
управле-
не
должен
попадать в состояние, физически недоступное или недопустимое с точки зрения конкретных условий эксплутации объекта.
Например, при работе электрической системы нельзя допускать перегрева, мотора; осуществляя маневр судна, необходимо
учитывать
ширину
фарватера
и т.д.
Подчеркнем,
что такого
рода ограничения на состояние объекта совершенно не зависят от свойств самого объекта и являются дополнительными,
диктуются
Имея
условиями
дело
конкретной
с управляемым
задачи.
объектом,
мы
всегда
стремимся
так манипулировать „рулями“, чтобы, исходя из определенного
начального состояния, достичь некоторого желаемого состояния, т.е. реализовать стоящую перед нами цель управления.
Если,
скажем,
речь
идет
о запуске
спутника,
то
нужно
рас-
считать режим работы двигателей ракеты-носителя, который
обеспечит доставку спутника на желаемую орбиту.
Как начальное состояние объекта, так и цель управления зависят от
рассматриваемой прикладной задачи.
Как правило, существует бесконсчносе число способов упрал
влять объектом так, чтобы добиться желаемого результата.
В связи с этим и возникает задача, не просто как-то реализовать пель управления, а найти тот способ управления, который
в определенном смысле являстся наилучшим, отимальныем.
Конечно. для этого мы должны располагать критерием ка-
6.1. Постановка задачи оптимального управления
153
чества, позволяющим судить о том, какой способ управления
лучше, а какой хуже. Этот критерий также свой в каждой конкретной задаче. Так, при управлении электроприводом естественно стараться обеспечить отработку искомых величин за,
минимальнос время, расчет графика полста, самолста, из одного
пункта в другой преследует достижение наименьшей себестоимости и т.д.
Такова, в общих чертах задача оптимального
ния. Перейдем к ее математическому описанию.
управле-
2. Будем рассматривать объект, состояние которого в фик-
сированный момент времени описывается набором из п чисел
т, ..., Хи — фазовых координат (или фазовых переменных
[Ш].
Эти числа удобно считать компонснтами фазового
вектора (фазового состояния) т = (71, ..., 10)”. Таким
образом,
состояние
объекта
в каждый
момент
времени
мож-
но изобразить точкой (элементом) 7-мерного арифметического
пространства В, называемого фазовым пространством
объекта [УП].
Например, в случае механического объекта,
с конечным числом степеней свободы фазовый вектор 5 составляют из обобщенных координат 91, ..., 4к и обобщенных
импульсов рт, ..., рик.
Движение объекта проявляется в том, что его фазовые координаты меняются с течением времени $, т.е. фазовый
всктор являстся всктор-функцисй независимого переменного $.
При движении объекта фазовая (изображающая) точка
ж() = (т1(®, ..., т, (®)) описывает в фазовом пространстве кривую
фазовую
траекторию
(фазовую
кривую).
Обычно
фазовые координаты объекта являются „инерционными“ переменными. Это значит, что они непрерывно зависят от времени.
Пусть, далее, в фазовом пространстве Е” задано нскоторос
множество 5, представляющее собой совокупность всех фазовых состояний, в которых управляемому объекту разрешается
находиться. Тогда, при движении объекта, его состояние х({) в
154
каждый
6. ВАРИАПИОННЫЕ
момент
времени
+ должно
МЕТОДЫ
подчиняться
условию
(ебсвЕ",
(6.1)
которое называют ограничением на фазовые координаты
(фазовым ограничением). В ряде задач интерес вызывает
случай, когда множество 5 замкнуто, а фазовая траектория
может
проходить
по его границе.
Предположим, что положение имеющихся у управляемого
объекта „рулей“ описывастся в каждый момснт времени набором из г чисел 1, ..., и, — управляющих параметров,
составляющих вектор управленияи = (4, ..., и»). Положение „рулей“ объекта в каждый момент времени можно изобразить точкой 7-мерного арифметического пространства В". Манипулирование
„рулями“
означает выбор вектор-функции 'и(1),
называемой управлением (управляющим воздействием).
Существенным моментом, характеризующим управляемую
систему, являстся описание множества допустимых управлений, т.е. совокупности таких функций и({), которые исходя
из реальных обстоятельств рассматриваемой задачи разрешал
ется выбирать в качестве управлений и среди которых мы
будем в дальнейшем искать, например, оптимальное управление. Это множество задают, как правило, с помощью „геометрических“
условий,
накладываемых
на
возможные
значения
функции ц(#), и требований к сс функциональным свойствам.
В любом реальном объекте „рули“ не могут занимать совершенно произвольные положения либо из-за, конструктивных
особенностей объекта и ограниченности ресурсов, либо из-за
условий эксплуатации объекта, опасности нарушения его нормальной работы.
Это значит, что в пространстве В” управляю-
щих параметров выделено некоторое множество ©, называемое
областью управления. В любой момент времени точка (+)
должна принадлежать этому множеству. Иначе говоря, для любого # верно соотношение
иНЕПОСЕ',
(6.2)
6.1.
Постановка
задачи
оптимального
управления
155
называемое ограничением на управление.
Самым типичным является случай, когда область управления И — ограниченное замкнутое множество (последнее означает, что, грубо
говоря, „рули“ могут занимать и свои „крайние“ положения).
Помимо ограничения на значение управляющего вектора, в
каждый момент времени необходимо также выяснить допустимый характер изменения этого всктора, с течением времсни. Обычно в качествс управлений рассматривают кусочно
непрерывные вектор-функции, т.е. вектор-функции, у которых каждая координатная функция 1:(Р) имеет на любом
конечном интервале конечное число точек разрыва, причем все
точки разрыва первого рода [1]. Значение управления в точкс
разрыва нс играет сколько-нибудь существенной роли в задачах
управления.
Но
совпадает
для
определенности
с левосторонним
удобно
пределом
считать,
что
вектор-функции
оно
в точке
разрыва:
и (т) = и(т- 0) = „Ша
(8.
Также будем считать, что управление (р) непрерывно на
концах рассматриваемого отрезка [#1 , $2].
Если ограничение (6.2) на область значений управления выглядит достаточно естественно, то выбор в качестве управлений кусочно непрерывных функций нуждается в пояснениях.
Наиболее
реалистично
выглядит
требование,
чтобы
упра-
вление и(Р) было непрерывной функцией. Оно соответствует
представлению о том, что управляющее воздействие, обладая
определенной
Но
такое
инсрционностью,
требование
свидетельствуют
нс
может
оказывается
даже
простейшие
изменяться
весьма
примеры
скачком.
неудобным.
Как
линейных
задач
(см. 7.4), в классе непрерывных функций решение задачи оптимального управления может не существовать.
Кроме того,
более
вниматсльный
показывает,
но
выбрать
точности
что
такие
можно
анализ
почти
реальных
всегда
параметры,
считать
в
управлясмых
качестве
которые
объектов
управляющих
в пределах
безинерционными.
мож-
разумной
Поэтому
класс
156
6. ВАРИАЦИОННЫЕ МЕТОЛЫ
кусочно непрерывных функций оказывается выгодным с теоретической точки зрения и приемлемым с точки зрения практических
приложений.
Кусочно непрерывные управления со значениями, попадающими в область управления И, будем называть допустимыми.
В дальнейшем,
говоря
об управлениях,
будсм имсть
в виду
до-
пустимые управления, не оговаривая это каждый раз.
Чтобы указать, как именно фазовая траектория объекта
определяется по выбранному управлению, нужно иметь закон
движения объекта, описывающий динамические свойства рассматриваемой управляемой системы. Будем предполагать, что
закон движения представляет собой соотношение
$ = 12, и),
где (жи)
функция,
ными
= (Л(Ьж, м), ..., Ж(а, м)” — известная вектор-
конкретный
особенностями
задачи.
вид которой
по всей
определяется
объекта, или условиями
Далос будем полагать,
неперсрывны
(6.3)
конструктив-
рассматриваемой
что функции (хи),
совокупности
переменных
=1Т,п,
и непрерывно
дифференцируемы по совокупности переменных х [У].
Объект, математическая модель которого задается системой уравнений (6.3), является управляемым, что выражается
в следующем.
Если выбрано (допустимое) управление ($),
те
[1, 12|, то подстановка его в (6.3) приводит к нормальной
системе обыкновенных дифференциральных уравнений (ОДУ)
[УПИ записанной в векторной форме:
2 1,0).
(6.4)
При заданных условиях на вектор-функцию } эта система удо-
влетворяет теореме существования и единственности для задачи Коши, т.е. при начальном условии ®(Н) = 2" = (11, ..., 2%)
т
она имеет решение, и притом единственное, в окрестности
точки #'. Другими словами, при выбранном управляющем воздействии ($) на отрезке [#1 , #2] движение объекта описывается
6.1.
Постановка
задачи
оптимального
управления
157
вектор-функцией, которая представляет собой решение задачи Коши для системы ОДУ [У].
Очевидно, что движенис
объекта будет меняться в зависимости от управляющего воздействия.
Решение системы (6.4) при заданном управлении
(+), как и определяемую этим решением кривую в фазовом
пространстве, называют фазовой траекторией, соответствующей этому управлению. Начальное условие 1 в задачах оптимального управления часто называют начальным
состоянием.
Заметим, что именно к виду (6.3) обычно сводятся уравнения движения для механических управляемых объектов с
конечным числом степеней свободы. Далее везде под управляемым объектом будем понимать систему ОДУ вида (6.3).
Детерминированность управляемого объекта означает, что
выбор управления ($), Ее [1,2], должен однозначно определять (при заданном начальном условии) траекторию ж(#}, ЕЕ
Е [1, 22|. Чтобы это было так, достаточно считать, что векторфункция
7(12.чц)
удовлетворяет
ранее
оговоренным
условиям
(непрерывность по совокупности переменных ($, х, и), непрерывная дифференцируемость по совокупности переменных 5).
Тогда, на каждом участке непрерывности управления 14(#} система (6.4) удовлетворяет теореме существования и единственности для задачи Коши.
В точках разрыва какой-либо из
координатных функций управления надо производить стыковку решений системы (6.4), обеспечивающую непрерывность
фазовой траектории. На рис. 6.1
хо
показан пример фазовой тра(т!)
ектории на плоскости, которая
отвечает управлению, имеюше(Е)
му разрывы первого рода в моменты
времени
т!
и
72.
Таким
О
=(ь)
образом, траектория ж() при
кусочно непрерывном управлснии является непрерывной кри-
вой,
а ее производная
2(®
ку-
Рис. 6.1
Хх
158
6. ВАРИАЦИОННЫЕ МЕТОЛЫ
сочно непрерывна на рассматриваемом отрезке времени (такие
кривые называют кусочно гладкими [\У]). Если и(Ю) — допустимое управление, а х({) — соответствующая фазовая траектория, удовлетворяющая ограничению (6.1), то пару функций
(=(1), (0) будем называть допустимым процессом.
Полезно иметь в виду следующую геометрическую интерпретацию системы
(6.3). Пусть в некоторый момент времени #
управляемый объект находится в фазовом состоянии ($). Вектор 2(Р) представляет собой вектор фазовой скорости и
является касательным вектором к кривой 5 = (+) в соответствующей
точке.
Если в фазовом
пространстве В” построить
при фиксированном ж всевозможные вскторы }(
возможных
допустимых
управляющих
времени #{ фиксирован),
т, и) для всс-
воздействий
то получим, согласно
и
(момент
(6.3), множество
допустимых (возможных) фазовых скоростей в точке х (на рис. 6.2 пунктиром
изображено множество концов всех та
ких векторов). Другими словами, выбор управляющего воздействия 14 (1) ЕП
в момент времени +, когда изображающая точка находится в состоянии х,
.
Рис. 6.2
равнозначен выбору
допустимой фазовой скорости,
с которой
изображающая точка выходит из этого состояния.
3. При рассмотрении реальных управляемых объектов прежде всего возникает задача управления движением. Для ее
формулирования
нужно
торое множество М
являются
задать
в фазовом
(цель управления)
желательными.
включение МСБ.
Говорят, что управление
пространстве
При этом должно
(1),
неко-
тех состояний, которые
быть выполнено
Е [н, %>], переводит объект
(6.3) из состояния 21 в состояние 2?, если соответствующая
этому допустимому управлению фазовая траектория ж(®) (решение задачи Коши для системы (6.4) с начальным условием
ж(Н) ==")
определена на том же отрезке времени
[#1 , >], удо-
6.1. Постановка задачи оптимального управления
159
влетворяст ограничению (6.1) и в момент времени $5 попадает
в фазовос состоянис 5? (т.с. (+2) = =?). Обратим вниманис на
то, что отрезок [Н, №] — это конечный промежуток числовой
прямой. Если управление и({) переводит объект (6.3) из начального состояния 2! в некоторое состояние 1? Е М, то будем
говорить, что управление ч({} реализует цель управления М.
Задача управления движением состоит в том, чтобы найти
какос-нибудь допустимос управление, рсализующее цель. Другими
словами,
для
объекта
(6.3)
требуется
отыскать
такую
кусочно непрерывную функцию и(#) со значениями в (, определенную на отрезке [11 #2] (>, вообще говоря, заранее не извест-
но), чтобы система (6.4) имела, решение ($), удовлетворяющее
начальному условию ®(Н) ==`, ограничению (6.1) и конечному
условию 2(12) Е М. Следовательно, задача управления сводит-
ся к решению краевой задачи для системы й-го порядка (6.3)
[УПИ при ограничениях (6.1) и (6.2). Однако общей теории
решения
подобных
задач
нст.
Доказательство
разрешимости
задачи управления и фактическое отыскание управления, реялизующего цель, наталкиваются на, серьезные трудности.
Мы не будем рассматривать вопросы разрешимости задачи
управления, предполагая, что цель управления, поставленная
для изучаемого объекта, может быть реализована. Отметим,
что во многих прикладных задачах разрешимость задачи управления вытекает „из физических соображений“.
4. В задачах управления движением возникают различные
по количеству и характеру краевые условия. Если множество
М, характеризующее цель управления, совпадает со всем фазовым пространством Е”, то такую задачу называют задачей
со
свободным концом траектории. В этом случае роль краевых
играют начальные условия (НН) =='.
Более сложные задачи — так называемые двухточечные
задачи,
или
задачи
с
фиксированными
концами.
Эти
задачи в качестве краевых условий имеют как начальное 2(# ) =
—=з!, так и конечное х (+) = 22. При этом интервал
времени
160
6. ВАРИАПИОННЫЕ
управления
12 — И может
МЕТОДЫ
быть как заданным,
так и подлежа-
щим определению. В этом случае множество М цели управления состоит из единственной точки 22.
В классе многоточечных задач управления для нсскольких
фиксированных
моментов
времени
Й,
$,
...,
Ви
за-
даны значения некоторых координат вектора состояния.
Наконец, в классе задач с подвижными (скользящими)
нонцами требуется найти управление, переводящее объект из
некоторого (заранее не известного) состояния с", принадлежащего известному множеству М, в некоторое состояние 2? из
известного множества М2. Часто эти множества представляют
собой гиперповерхности в арифметическом пространстве В”,
Если М1 и М> вырождаются в точки, то приходим к задаче с
закрепленными концами.
5. Предположим, что задача управления разрешима. Наиболее типичной является ситуация, когда задача управления
имеет бесконечно много решений, т.е. существует бесконечно
много управлений, реализующих пель, и все они с этой точки
зрения совершенно равноправны. В таком случае может быть
поставлена задача оптимального выбора:
среди допустимых
управлений
выбрать
такос,
при котором
управляемый
процссс
будет наилучшим в каком-то определенном смысле. Другими
словами, если качество процесса оценивается некоторой числовой характеристикой, то задача заключается в том, чтобы
выбором
управления
обеспечить
ее
максимальное
или
мини-
мальное значение.
Эту числовую характеристику называют
юритерием качества.
Значение критсрия качества определястся управлением, динамикой управляемого процссса (временем управления, фазовой траекторией). Поэтому критерий качества представляет
собой функционал того или иного вида, и задача оптимального
управления
минимум
состоит
или
в отыскании
максимум
этого
управлений,
функционала.
обеспечивающих
Случай,
когда
требуется максимизировать функционал, сводится к задаче ми-
6.1. Постановка задачи оптимального управления
нимизации
замсной
исходного
функционала
161
Г функционалом
—Г. Поэтому этот случай отдельно не рассматривают.
Таким образом, задача оптимального управления состоит
в том, чтобы найти такое управление %(#), реализующее цель,
для которого функционал принимает наименьшее возможное
значение. При этом управление ч#(#) называют оптимальным
управлением, соответствующую фазовую траекторию ®(®) —
оптимальной траекторцей, а процесс (%(#), ч(®)) — оптимальным процессом.
Для управляемых процессов с законом движения (6.3) наиболес широко используют так называемые интегральные критерии качества — функционалы вида
1= [лбь=ощо)
а.
(6.5)
К этому классу критериев относятся:
а) критерий оптимального
дынтегральной функцией
(жи)
быстродействия
с по-
=1,
который сводится к представлению Г=№-&.
Такой критерий используется в теории автоматического управления (в
следящих системах) для выбора параметров, обеспечивающих
наименьший по длительности процесс при отработке входного
сигнала.
Оптимальное управление в задачах с критерием опти-
мального быстродействия называют управлением,
оплтимальным по быстродействию.
6) интегральный квадратичный критерий с подынтегральной функцией
(тм)
о
=
162
6. ВАРИАЦИОННЫЕ
МЕТОЛЫ
где ж = (21, 12, ..., хо), а среди коэффициентов су; есть хотя бы
один ненулевой. В представлении (6.5) могут рассматриваться
как конечный (р < 25), так и бесконечный (ф = +05) интервалы времени. Такой критерий дает косвенное представление
о точности работы системы, рассматриваемой в фазовом пространстве.
Его
также
используют
управления.
в) энергетические
гральными функциями
(Ежи)
->94
в
критерии
и
теории
автоматического
качества
(м)
-
с подынте-
9,
где и = (1, 42, ..., и»), а среди коэффициентов д; ость хотя
бы один ненулевой.
Эти критерии характеризуют затраты
энергии, например, в задачах ориентации спутника, с помощью
газореактивных двигателей;
г) смешанный интегральный критерий с подынтегральной функцисй
дающий отклонения по фазовым
общие энергетические затраты.
координатам
„в среднем“
и
Наряду с интегральными критериями качества в теории
оптимального управления часто встречаются терминальные
функционалы, т.е. функционалы вида Г = Т(®(Н),2(6)). К
этому классу неинтегральных критериев относится, например,
критерий конечного состояния Г =Т(х(1)}. Его обычно
используют в тех случаях, когда систему необходимо привести
в заданное конечное состояние а = (а1, ..., ав) в момент времени {2 с наименьшей ошибкой. В такой постановке критерий
6.1. Постановка задачи оптимального управления
163
имеет вид
й
Т(=(и).=(ь)) = У`(ець) а
= в) а.
8=1
6. Неклассический
характер
задачи оптимального
управле-
ния особенно ярко проявляется в случае поиска управления,
оптимального по быстродействию, для системы (6.3), у которой правые части — линейные функции относительно хи ц
с постоянными коэффициентами, & множество И представляст собой замкнутый выпуклый многогранник, определясмый,
например, неравенствами |и;(1)| < 1,
7=Т.г.
Оказывается,
что оптимальное управление осуществляется скачкообразной
вектор-функцией (1), у которой точка и(+) поочередно находится в вершинах многогранника С. Закон управления сводится к последовательности скачкообразных переходов от одной
вершины к другой.
Эта линсйная вариационная задача, играющая важную роль
в технических приложениях,
решена в 7.4.
Классические мето-
ды для ее решения не применимы (см. 6.4). Указанный скачкообразный характер оптимального управления не позволяет
ограничить класс допустимых управлений только непрерывными функциями. Если же ввести такое ограничение, то задача,
станет неразрешимой. То жс будст и в случае, ссли условиться,
что множество
управлений
( —
открытое
множество.
Для отыскания оптимального управления
вать два подхода. Первый заключается в том,
управление строится как функция времени +.
лучают программное управление, которое
на
весь
интервал
времени
и не
зависит
от
можно использочто оптимальное
В результате поизвестно наперед
возможного
поведения
системы.
Система управляется без обратной связи (по разомкнутому циклу). С прикладной точки зрения такой подход
несовершенен, так как подразумевает точное знание динамики
объекта, но любая математическая модель движения объекта,
приближенна, и не учитывает влияния всех внешних факторов.
164
6. ВАРИАЦИОННЫЕ
МЕТОДЫ
Второй подход состоит в том, что оптимальное управление
строится
как
функция
фазовых
называют синтезирующей
синтезирующей функции —
ных
управлений
(см.
координат.
Такую
функцию
функцией, а задачу построения
задачей синтеза оптималь-
7.5).
Этот
подход
ближе
к практи-
ческим приложениям, так как при управлении учитывают текущее состояние системы (управление с обратной связью), но
синтезировать
управление
значительно
программное управление.
сложнее,
чем
строить
Однако можно сочетать оба подхода,
(например, в методе аналитического конструирования).
7. Проиллюстрирусм на примерс, как ставится задача оптимального управления.
Пример
6.1.
Рассмотрим
математи-
ческий маятник (т.е. груз малых размеров
на новесомом стержнс), который находится вблизи верхнего (неустойчивого) положения равновесия (рис. 6.3).
Для простоты будем предполагать, что
тренис
отсутствуст.
Если
угол
ф откло-
нения маятника отсчитывать против хода
часовой
положение
равновесия,
то
стрелки
уравнение
от
направления
движения
на
маятника
верхнсс
имеет
ВИД
ФФ2
.:
пы 2 ТР —= то,
где т — масса маятника; [ — его длина; 9 — ускорение
свободного падения.
Ограничиваясь областью, достаточно
близкой к положению равновесия, мы можем заменить зшф на
ф, так как зшф = ф при малых значениях ф. Ввсдя обозначение
и? = 9/1, & > 0, получим линейное дифференциальное уравнение
второго порядка
Уи
ф=О,
(6.6)
6.1.
Постановка
задачи
оптимального
управления
165
описывающее движение маятника, при малых значениях ф, т.е.
при [| < Ф для некоторого Ф (уравнение линейного приближения).
Известно
равновесия
(это,
впрочем,
маятника
ное положение
очевидно),
неустойчиво.
(0) = фо,
что верхнее
Каково
$(0) = фо,
положение
бы ни было началь-
отличное
от положения
равновесия (ф = 0, р’ =0), маятник начинает движение, согласно дифференциальному
уравнению,
по закону
ФВ) = Оле" + бое“,
(6.7)
где Ст, С> — постоянные интегрирования.
Из соотношения
(6.7) вытекает, что маятник в конечном счете удаляется от
положения равновесия.
Правда, следует отметить так называемое лимитационное движение, возникающее, например,
в линейной модели (6.6) при 2% = —иф0; при таком движении
маятник приближается к положению равновссия с убывающей
скоростью, но нс достигает сго ни за какой конечный промсжуток времени.
Допустим теперь, что к маятнику приложена некоторая
внешняя сила Е({), линия действия которой в каждый момент
времени # перпендикулярна оси маятника. Величину и напрал
вление силы можно выбирать по своему усмотрению, меняя
во времени, но при этом должны соблюдаться ограничение
|Е()| < А, которос отражаст лимиты на имеющисся росурсы,
и требование, чтобы функция Ё(#} была кусочно непрерывной.
Будем описыватъ силу скалярной величиной Р положительной,
когда сила направлена, в сторону увеличения угла ‹р, и отрицательной, когда сила направлена в сторону уменьшения ф.
Тогда уравнение линейного приближения вынужденного движения маятника будет таково:
2
Сыр,
где
(В =
(1) /(т/.
(68
166
6. ВАРИАЦИОННЫЕ
МЕТОДЫ
Спрашивается: можно ли подобрать функцию Р'(Р) внешнсго воздействия так, чтобы маятник из начального состояния
ро; Фо за конечное время достиг положения равновесия? Если
это
возможно,
то
как
привссти
маятник
равновесия за наименьшее время?
вопросы
связан
с решением
в
верхнсс
Отметим,
задачи
Коши
положенис
что ответ на эти
для дифференциаль-
ного уравнения (6.8) второго порядка.
Однако требуется не
просто решить задачу Коши с заданными начальными условиями, а подобрать вид правой части уравнения так, чтобы
решение соответствующей задачи Коши в некоторый конечный
момент времени проходило через положение равновесия. При
этом выбор правой части должен удовлетворять ограничениям
(кусочная непрерывность Ё'(#) и неравенство |Р'(#| < В). Пусть
такая функция существует
причем
не
единственная.
(что, конечно,
Тогда,
возникает
совсем неочевидно),
задача,
оптимального
выбора, т.с. выбора такой функции, которая обсепсчивает наименьшее время перехода из начального состояния в положение
равновесия.
Использусм рансс введенные обозначения.
В каждый момент времени $ состояние маятника описывается двумя параметрами
(фазовыми
координатами):
углом
отклонения
11 =ф
и скоростью ф = 12. Значит, фазовое пространство рассматриваемого объекта является двумерным (представляет собой
фазовую плоскость).
имеет вид
Ограничение
[21| <Ф
на
фазовые
координаты
(6.9)
и диктустся размерами области, в которой применима линсйная
модель движения маятника.
Роль управляющего параметра
играет „сила“ {, введенная в (6.8). Обозначим его буквой и.
Согласно условию задачи, область управления И описывастся
неравенством
Ш] < Л
(6.10)
Множество допустимых управлений — это множество кусочно
непрерывных функций и(+), в каждый момент времени подчиняющихся
ограничению
(6.10).
6.2. Задача Лагранжа в форме Понтрягина
167
Уравнение (6.8) в принятых обозначениях сводится к системс дифференциальных
уравнсний
ри
=,
,
12 =
2
(6.11)
ша и,
которая относится к законам движения управляемого объекта
вида
(6.3).
$=Н
=0
Предполагаем,
задано
начальное
=
что в начальный
состояние
2
20
1
]=|’,
то
а
цель
управления
плоскости,
состоит
времени
|,
(6.12)
90
из
соответствующей
момент
объекта,
единственной
положению
[12|
г
2
точки
На
фазовой
равновссия:
0
-|[о}-
(6.13)
За критерий качества, Г берем, как условились, время. Нужно выяснить, какое допустимое управление переводит объект,
описываемый системой (6.11), из начального состояния (6.12) в
нужное состояние (6.13} за наименьшее время.
Решение поставленной задачи оптимального управления дано в 7.5
при
дополнительных
предположениях
& =1,
№ =1,
которые несущественны, но упрошают выкладки.
Вопрос о
применимости линейной модели для описания реального объекта (маятника), т.е. вопрос об описании области (6.9), не
обсуждается.
6.2. Задача
Лагранжа
в форме
Понтрягина
Из предыдущего параграфа ясно, что задача оптиьмального
управления очень близка, в свосй постановке задаче Лагранжа
(см. 4).
Поэтому мы начнем с обсуждения вариационных
методов решения этой задачи.
168
6. ВАРИАПИОННЫЕ
Для задачи Лагранжа
МЕТОДЫ
(см. 4.1)
р
П® = | Юж)
шпь
ж= (а, 42, ...) Жт),
[1
рассмотрим частный случай, когда дифференциальные уравнсния (6.14) разрешены относительно производных:
1
=
Побит),
(6.15)
2 =
(6х1,
Хоть.
т).
Переменные 11, ..., Хи, соответствующие производным в левой
части систсмы (6.15), можно рассматривать как фазовые переменные, а остальные ти-1, ..., т — как управления. Для
управлений
введем
обозначения
и;,
1 = 1Т,г,
гег=т-
п.
В
таких задачах принято независимую переменную обозначать
буквой # (она ассоциируется с временем), а не х как в классическом
вариационном
исттислении.
Введенное
деление
переменных
на фазовые переменные и управления позволяет записать дифференциальные связи (6.15) в видс
в =Л(Ь
т, и),
где
2
—
=
(т
(11,
Будем
нал
т
...,
Жи)
+ 94 —
ум
=
(6.16)
т
(м1,
...5
№)
=
—
рассматривать задачи, в которых
с учетом
введенных
обозначений
имеет
(#1
(11...
п)
т
)
:®=ЕТ,.
целевой функциовид
|
Па]
/
= | (в,
и) а.
(6.17)
Заметим, что он являстся вырожденным функционалом, так
как сго интегрант } (+ ж, %) нс зависит от производных искомых функций.
Предполагается,
что отрезок
[Н1. 2| фиксирован
6.2. Задача Лагранжа в форме Понтрягина
169
и на его концах поставлены следующие краевые условия:
Т(=(н)) =0,
9(=(+)) =0,
(6.18)
где ф = (т, ... 4)”, 9 = (91, ...) 90)”, 8,1 <п
Задачу (6.16)-(6.18) называют задачей Лагранжа в форме Понтрягина. Предполагасм, что всс функции {" (1=0, п),
& также
функции
Ф, 9 дважды
2есЦ[н, В),
и
непрерывно дифференцируемы,
ЕС([1,5]|, Е"). В такой постановке за-
дача Лагранжа отличается от задач оптимального управления
только классом допустиьмье функций (в задачах оптимального управления фазовые траектории ж(Р кусочно гладкие, а
управления
и({) кусочно непрерывные),
а также
отсутствием
ограничений на фазовые координаты, и управления.
Для решения задачи (6.16)
(6.18) применим подход Лагран-
жа, основанный на введении множителей Лагранжа и уже
использовавшийся ранее (см. 4.2). Составим вспомогательный
функционал задачи (6.16)-(6.18):
|
ви] = Грач таки) + ты).
(6.19)
й
Здесь
Кети) =
жи) м
(ва,
м) =
=
+"
чагранжиан задачи; №(1) = (№1 (8). 2 (8)
(в - 7)
(6.20)
= (ша, 8)
и = (м, ..., и)" — множители
Лагранжа,
Множители Л, ({)
учитывают дифференциальные связи (6.16) (как и в 4.2), а
множители [1 ; — ограничения вида (6.18).
'Теорему 4.1 можно обобщить на случай краевых условий виа (6.18). Такое обобщение означает, что экстремали задачи
Лагранжа (6.16)—(6.18) являются экстремалями вспомогательного функционала, [*[2, и]. Чтобы найти экстремали задачи Ла-
170
6. ВАРИАЦИОННЫЕ МЕТОДЫ
гранжа, нужно из экстремалей вспомогательного функционала
выбрать те, которые удовлетворяют краевым условиям (6.18)
и дифференциальным
связям
(6.16).
Иначе
говоря,
экстрема-
ли вспомогательного функционала, удовлетворяющие краевым
условиям и дифференциальным связям, являются экстремалями
задачи Лагранжа.
Выпишем, имея в виду сказанное, уравнения для экстремалей задачи (6.16)-(6.18). Уравнения Этмера вспомогательного
функционала, с учетом разделения переменных на фазовые пе-
ременные и управления, имеют вид
Ч,
—
и
”
1
Ри,
и
Нщ
0
И
=
= 0,
=
или для данного вида, лагранжиана
=
где
(6.21)
1,7,
(6.20)
(Р-Н,
(О,
—
А, =0,
а=Т м,
(6.22)
1=ТР,
(6.23)
= (1, /?, ..., {"). Уравнения (6.23) алгебраические, так
как производные 4% не входят в лагранжиан. К системе (6.22),
(6.23) нужно добавить условия трансверсальности на левом и
правом концах (см. замечание 4.2):
Г
Г, 2;
НЫ
=р
!
Та,
и
=й
Г.
Г/.И
“
НЕИ
=
нь
т
й
т:
а
Тот
|,
=-к
=-и
"НИ
т
9.
=
и
й
)
ВИ
То
9.р
нь’
п;
И
1=1,
т;
(6.24)
=1,п;
=
;
и,
6.2. Задача Лагранжа в форме Понтрягина
171
из которых лишь первая и третья группы уравнений
ются тривиальными. Они дают соотношения
(и) = и", (20);
Ж(ь) = -и"©, (= (0).
‚
не явля-
1=Гт,
(6.25)
ШП.
(6.26)
1{—1>
Чтобы определить экстремали задачи Лагранжа (6.16)—(6.18)
в форме Понтрягина, нужно к системе уравнений (6.22)-(6.26)
добавить уравнения дифференциальных связсй (6.16) и краевые
условия (6.18). В результате получим систему 2п
т уравнений,
среди
которых
2%
уравнений
—
дифференциальные
порядка (уравнения (6.16) и (6.22) ) иг уравнений
первого
— алгебра-
ические (уравнения (6.23) ). Решение этой системы зависит от
2п постоянных интсгрирования и $ + [ неопределенных множителей Лагранжа
4
и и;.
Для
определения
всех 2% + $ + [ нсиз-
вестных имеются 27, условий трансверсальности (6.25), (6.26) и
8-1 краевых условий (6.18).
Рассмотрим другую задачу, заменив в задаче (6.16) (6.18)
интегральный функционал (6.17) смешанным целевым функционалом
22
Ве, и] = [легла
Тео) +Те(ь).
И
Эту задачу часто также называют задачей Лагранжа в форме
Понтрягина.
Вспомогательный функционал для нее будет
имсть вид
Ве, м = мии
ен) +7626)
+ еб +текь
с тем же лагранжианом, что и в предыдущей задаче.
Поэтому
уравнения Эйлера будут такими же, как и в предыдущей задаче,
172
6. ВАРИАПИОННЫЕ
т.е. будут
иметь
вид
(6.22),
(6.23).
МЕТОДЫ
Условия
трансверсально-
сти изменятся за счет терминальных слагаемых функционала
В [з.ы]:
Если же ограничений (6.18) нет, то получаем задачу (6.16),
(6.21) со свободными концами — третью формулировку задачи
Лагранжа в форме Понтрягина.
этой задаче имеют вид
Условия трансверсальности в
мн) = 1, [2]
№) = 7; [20],
=Ь
Мы рассмотрели три задачи, в которых отрезок [#1 , #2] фиксирован.
Однако подход Лагранжа позволяет получить необходимые условия в задаче Лагранжа в форме Понтрягина
и в случае переменных концов Н и 12.
Рассмотрим это на
примере первой из ранее сформулированных задач
задачи
(6.16)—(6.18).
Оказывается,
что и при изменяющихся
концах
Н и 2 экстремали задачи Лагранжа являются экстремалями
вспомогательного функционала (6.19). Но при этом вспомогательный
функционал
(6.19) зависит
нс только
от функций
2(0
и и (1), но и от переменных #1 и $, т.е. имеет вид
|
вин] = [пач из
уни).
(6.27)
ы
Найдем
вариацию
ждения
из
3.2.
функционала
Зафиксировав
Г".
и, п ,12|], повторяя
допустимые
вариации
рассуд2(+),
6.2. Задача Лагранжа в форме Понтрягина
173
би(®, ды, 042, составим функцию
2
(а) =
ад>
]
(=
+ ада, & + ад,
и + аби) &-
и -аби
р
где
2' = ж(н);
= (621, ..., 642)".
нала,
Иен
я? = (6);
Согласно
Ф [2
обе]
да! = (9%, ..., да);
определению
о, дж. би, бн бо, дт, 6?
2
вариации
ба? =
функцио-
= 0’ (0) =
п
2,
= [Уз
я
+ и '@[2? + ода? ],
реш
и, ‘биз аё+
=1
9=1
У
м -У`(Ки м,
+=
4=1
п
+(ь-Уьи,)|
1—1
ба +
1+=Н
т
5-м.)
12
1=1
бе.
=
Приравнивая вариацию к нулю, получаем необходимые условия
экстремума для функционала, вида (6.27). При этом системы
уравнений (6.21) и (6.24) дополняются уравнениями
Иа
(2- Ува.)
р
= 0,
ты
(41-Х,
1=1
(6.28)
=0.
Ня
Значит, экстремали функционала (6.27) удовлетворяют тем же
уравнениям, что и экстремали функционала (6.19).
Но кромс того, они подчиняются и дополнительным условиям (6.28),
которые можно рассматривать как замену условий фиксированных концов.
174
6. ВАРИАЦИОННЫЕ
Чтобы
теперь
определить
МЕТОДЫ
экстремали
задачи
Лагранжа
(6.16)—(6.18) в случае переменных концов Н и +, нужно к
системе условий (6.22), (6.23), (6.25), (6.26) и (6.28) добавить
уравнение дифференциальных связси (6.16) и красвыс условия
(6.18).
При этом, учитывая соотношения Г», = Л; = Т,п,
уравнения (6.28) можно преобразовать к виду
Г(=(н.), (в)
Это
=
соотношение
позволяет
и
определить
ссть
ии)
то
=0
А=12.
(6.29)
недостающее
условис,
которое
параметры
#1 и $.
Для дальнейшего обсуждения задачи Лагранжа в форме
Понтрягина нам удобно использовать каноническую форму
уравнений Эйлера, которые в задаче Лагранжа (4.1)—(4.3) имеют вид (4.11). Введем канонические переменные
где /*=/-+ У) ^;9;
(6.30)
=Ъп,
= (и,
лагранжиан задачи, и запишем функцию
Гамильтона
в которой переменные у, находятся из системы уравнений
(6.30). Уравнения Эйлера (4.11) эквивалентны системе уравнений
ар;
Е =
фи;
=
17;
Ну
нь,
.
Вернемся к задаче (6.16)—(6.18).
=
(вх,м) м
=], п;
=Ьи
Ее лагранжиан имеет вид
Ритм).
6.2. Задача Лагранжа в форме Понтрягина
175
Поэтому
п
И:
=
А,
Н(ьз,р,
и)
=-Б+У
ар,
=
1=1
=>
и-Р,
2=Тп. (6.31)
Функцию Гамильтона Н для задачи Лагранжа в форме Понтрягина часто называют функцией Понтрягина.
В канонических переменных дифференциальные связи (6.16)
и уравнения Эйлера (6.22) можно записать в виде нормальной
системы ОДУ
С =,
р
1-=Тт
е=-Нь
=,
(6.32)
которую называют гамильтоновой системой.
Чтобы получить полную систему условий к (6.32) нужно
добавить вторую группу уравнений Эйлера — алгебраические
уравнения (6.23), которые с учетом (6.31) можно преобразовать
к виду
Ну, =0,
71=1.г.
(6.33)
Кроме того, нужно добавить краевые условия (6.18) и условия
трансверсальности (6.25), (6.26), которые в канонических перс-
менных имсют вид
ре)
= ит, (240),
р)
1
= —и`0, (=)
1=
2=Тп,
;
)
=,
(6.34)
п.
(6.35)
Итак, метод Лагранжа, широко используемый в решении
вариационных задач, позволяет получить необходимые условия экстремума для задачи Лагранжа в форме Понтрягина.
176
6. ВАРИАЦИОННЫЕ
МЕТОДЫ
Эти условия дают возможность найти решение задачи в классе
гладких функций т(®, 1= 1, п, и непрерывных функций и; (#,
1
=1г.
Подвести итог раздела можно так: ссли функции,
входящие в постановку экстремальной задачи, обладают достаточной гладкостью, то для решения задачи можно использовать
подход, основанный на введении множителей Лагранжа.
6.3. Некоторые задачи с ограничениями
в классическом вариационном исчислении
Для
задач
ограничений
оптимального
на допустимые
управления
функции,
характерно
т.е. фазовых
наличие
ограниче-
ний и ограничений на управление. Некоторые задачи с такими
ограничениями удается решать с помощью методов вариационного исчисления.
Рассмотрим задачу
(6.36)
в ежы
Пу] = [ели
Е
с дважды
классе
непрерывно
непрерывно
творяющих
дифференцируемым
дифференпируемых
интегрантом
функций
(5),
{
в
удовле-
условию
(1)
2 ф(=),
хе
[21, 22],
(6.37)
где
фЕС\[1т, 2]. Введением функции и(т) = у'(т) эту задачу
можно свести к задаче Лагранжа в форме Понтрягина с фазовыми ограничениями (6.37):
22
Пу, ч] = [ель
—ехы,
Уи.
21
Однако для наглядности вариационного подхода остановимся
на, исходной формулировке (6.36), (6.37).
6.3. Некоторые задачи с ограничениями
Равенство у = ф(т) определяет гранипу множества, внутри которого не могут находиться значения функции, доставляюшсей экстремум функционалу (рис. 6.4).
Наличие
ограничений (6.37) приводит к
необходимости
некоторой
177
у
Е]
©,
кор-
Е
:
а
Ь
хх
Рис. 6.4
ректировки вывода необходимых условий экстремума функционала.
Основное условие — уравнение Эйлера — выводилось в
предположении, что функции могут свободно варьироваться,
т.е. если у — допустимая функция, то допустимыми являются также любые функции у-+ду при ду, достаточно малых
по норме. Для вариаций фунжции у(%), удовлетворяющих неравенству ду > 0 на отрезке [71, 22], допустимыми функциями
являются и функция у-+ ду, и функция у—0ду.
При наличии
ограничений (6.37) в случае функции у(5), выходящей на, границу множества возможных значений (см. рис. 6.4), допустимой
является любая функция у(т) + ду(т) при д9(5) > 0 на отрезке
[@, 9], но функция у(5) —ду(х) уже не будет допустимой, так как
будет принимать значения, не удовлетворяющие ограничениям. Значит, при наличии ограничений указанного типа вместо
произвольной вариации надо рассмотреть односторонние вариации, которые определяются функциями ду(т) одного знака на
интервале (а, 5). Такие вариации позволяют получить решение
задачи в случае, когда экстремум достигается на функции, не
являющейся экстремалью.
Заменим в задаче (6.36), (6.37) зависимос переменное у на
переменное д согласно уравнению у = 27+ (2).
Тогда у’ =
= 222' + ф'(1) и функционал относительно 2 принимает вид
12
ЛА=
|| Падуе
аут
= |
1
болг’)
178
6. ВАРИАЦИОННЫЕ
МЕТОЛЫ
Функция 2(1) уже не подчиняется каким-либо ограничениям, а
границе области в исходной задаче соответствует 2 = 0.
Так как в задаче для функции 2(2) ограничений нот, эта
функция,
будучи
точкой
экстремума
функционала,
должна,
удовлетворять уравнению Эйлера,
2$ -$,=0.
Но
1
1.
1
Фе
а
Е?"
1
ИЕ
1
ТРЕ
5,
=22
1!
Ту
4
1
+ ети.
Следовательно,
4
4,
Уравнение Эйлера для переменного
уравнению для переменного у:
.
2 свелось
к следующему
(чл -л)=0.
т.е. распадается на два уравнения: первое — ; =0, которому
удовлетворяет функция у = (5); второе — уравнение Эйлера,
для исходного функционала (6.36).
Итак, экстремум функционала (6.36) при наличии ограничений (6.37) может достигаться на функциях, график которых
состоит из участков границы множества допустимых значений
и дуг экстремалей (в частном случае участок границы может
стянуться в точку).
Для полного решения задачи нужно также найти условия
сопряжения участков экстремалей с участками границы множества допустимых значений. Пусть экстремум функционала,
6.3. Некоторые задачи с ограничениями
(6.36) достигается на составной функции у(т) и точка а
есть точка сопряжения экстремали с функцисй у = ф(х), график которой ограничивает множество допустимых значений
(рис. 6.5). Для определенности
считаем, что экстремали соответствует участок слева от точ-
179
У
|
=
ки а. Тогда
Пу = ея
,у( пра
еб
ф (2) а.
Приращение функционала, соответствующее вариации ду(7),
будет состоять из двух частей: приращения на экстремали
а- да
АД
= ]
елуяы
+9) ме
полны
и приращения на участке функции у = ф(5)
22
а-да
а
оба,
= ] Делфи, (а) ат = Нева), ф'(а))ба + (до).
а
Вариация функционала также распадается на два слагаемых,
соответствующих вариации экстремали и пограничной функции.
Слагаемое
числить
о[, соответствующее
по обычной
формуле
вариации
экстремали,
можно
с подвижным
концом, перемещающимся вдоль кривой у = ф(2) (см. 3.2):
11
=
(1 >
(и
> Фи)
ва
;
вы-
правым
180
6. ВАРИАЦИОННЫЕ МЕТОДЫ
а слагаемое 15, соответствующее пограничной функции, равно:
9
= —1
(а,
(а), ф'(а))да.
Так как на функции (5%) достигается экстремум, то сумма
511 +15 должна равняться нулю, откуда, в силу произвольности ба и с учетом равенства у(а) = ф(а), получаем
(ть) — Лену,Ф) — 9 -Ф)Ль) | _ = 0.
Преобразуем разность /(х,у,у’) — (ту, Ф’)
теоремы (формулы)
Пельу)
—
с
Иль)
д—=а
где 4 —
некоторое
число
между
преобразованное выражение в
(у -е)(иельа =
помошью
д—=а
Лагранжа, [П]:
Реьин+)
(6.38)
ф’(а)
и у’(а).
т—а
,
Подставляя
(6.38), получаем
вы)
2.70.
Снова применим теорему Лагранжа:
(и )(а-у) Л, (т. |. = 0,
где 49, — некоторое
220 для значений 4
вытекаст, что у’(а)
теоремы Лагранжа,
Таким
число между
между у'(а)
= Ф'(а), так
невозможно
образом,
при
(6.39)
ди у (а). Если Ли (а, у(а),9) 7
и ф’(а), то из равенства (6.39)
как равенство 4 =у’(а) в силу
при у'’(а) 7 Ф’(а).
достаточно
общих
предположениях
об интегрантс функционала, (Ри (х,9(1),9) 20 при любом 4)
график
функции
функции
(5),
у(5)
или,
в точках
другими
сопряжения
словами,
касастся
производная
графика
функции
(<) должна быть непрерывной.
Условие непрерывности производной функции даст дополнительные уравнения, необходимые для определения экстремалей. Пусть, например, решается задача, (6.36), (6.37) в классе функций 9(1) © Ст, 52] с фиксированными значениями на
6.3. Некоторые задачи с ограничениями
концах у(т1) = у, у(22) = у2.
Предположим,
181
что график иско-
мого решения включает в себя один участок границы у = ф(1)
(см. рис. 6.4).
Если
найдено
общее
решение
уравнения
Эйле-
ра, и тем самым получено уравнение семейства экстремалей для
функционала задачи, то для построения решения нужно определить:
— абсциссы а и 6 точек сопряжения графиков экстремалей с
границей множества допустимых значений;
—
две
постоянные
интегрирования
на
левом
участке,
соот-
ветствующем экстремали;
— две постоянные интегрирования на правом участке, соответствующем экстремали.
рых
вые
Всего имеются шесть неизвестных, для определения котонужны шесть уравнений.
Два уравнения — это краеусловия у(71) = ур, (52) = 92.
Два уравнения вытека-
ют из непрерывности искомой функции в точках сопряжения:
(а) = Ф(а), у) = Ф(Ь). И два уравнения — это условия непрерывности производной функции у(5) в точках сопряжения:
у’ (а) =9'(а), у (5) =$' 6).
Пример
6.2.
Найдем
кри-
вую наименьшей длины, соединяющую точки А(а. уд} и В(5, ув)
и не заходящую внутрь круга О
(рис. 6.6).
Формально ограничение в поставленной задаче нс относится
к тому типу ограничения (6.37),
у
е
Рис.
6.6
которое мы рассмотрели. Однако отметим, что в приведенных
выше рассуждениях, главным в которых был анализ точек сопряжения, используются только локальные свойства функции
(=).
Поэтому все полученные результаты будут верны и в
данной задаче.
В поставленной задаче в предположении, что искомая кривая является
графиком
функции,
функционал
можно
записать
182
6. ВАРИАЦИОННЫЕ
МЕТОЛЫ
следующим образом:
Ь
ли = [| Мета.
Так
как
интсгрант
рассматривасмого
функционала,
зависит
только от 1’, его экстремалями являются прямые у = Сух + С
(это, впрочем, очевидно).
Если круг ) не пересекается с
отрезком
АВ,
то
решение
задачи
—
функция,
графиком
ко-
торой является указанный отрезок АВ.
Если же круг О
пересекается с отрезком АВ, то решение задачи следует искать в виде кривой, составленной из отрезков, сопряженных
с дугой окружности 90, ограничивающей круг ДО. Поскольку
ИИ = (1 + (’)?)
2 0, кривая должна быть гладкой в
точках сопряжения, т.е. отрезки, стыкующиеся с дугой окружности 9), являются отрезками касательных к этой окружности
(см. рис. 6.6). Имеются два кандидата в кривые наименьшей
длины: один — кривая, расположенная выше отрезка АВ (кривая АММВ на рис. 6.6), другой
ниже (кривая АМ’М№'В на
рис. 6.6). Выбор из двух кандидатов зависит от расположения
центра круга ДР по отношению к отрезку АВ: центр и искомая
кривая наименьшей длины располагаются по разные стороны
от прямой АВ. Отметим, что обе кривые соответствуют двум
точкам минимума рассматриваемого функционала, определенного на, множестве кусочно гладких функций, графики которых
не пересекают круг О.
Эта задача была решена в 1871 г. Тодхантером.
3
Метод, примененный нами в задаче с ограничениями на значения допустимых функций, можно использовать и в задачах
другого рода — задачах с управлением. Рассмотрим задачу о
минимизации функционала,
#2
Пен = ] аи
й
(6.40)
6.3. Некоторые задачи с ограничениями
в классе
непрерывных
функций
х(#),
183
удовлетворяющих
крае-
вым условиям
&н)
=,
2(12}
= 12,
и в классе непрерывных функций и(#) (управлений), подчиняю-
шихся ограничению
и(К <,
К= соя.
(6.41)
Предложенная задача может быть сведена, к задаче с ограл
ничениями в виде равенств. Для этого нужно ввести вспомога-
тельную функцию 2(® по формуле
=ЕБ-и
и заменить
ограничение
(6.41)
эквивалентным
ему
ограниче-
нием
2
Ник
—=0.
(6.42)
Тогда, исходная задача, будет эквивалентна, задаче Лагранжа, с
целевым функционалом
[2
и уравнением связи (6.42) (см. 4.1).
Этот подход может использоваться и в случае, когда вместо
ограничения вида (6.41) в задаче ставится ограничение в виде
двойного неравенства
К
<
и(#)
<
Ко.
(6.43)
Введя вспомогательную функцию 2, такое ограничение можно
заменить эквивалентным ограничением в виде равенства
(и
1) (2-м)
=0.
184
6. ВАРИАЦИОННЫЕ
МЕТОДЫ
Рассмотренный подход фактически исчерпывает возможности классического вариационного исчисления в задачах с
ограничениями, приводящими к поиску экстремума в замкнутой области. Успех здось в основном определяется тем, удастся
ли с помощью некоторых искусственных приемов заменить в
ограничениях неравенства, равенствами. Иногда способ такой
замсны
подсказывастся
самой
постановкой
задачи.
Но
даже
если такое преобразование в задаче удалось осуществить, преобразованная задача, может не иметь решения в классе гладких
(и даже непрерывных)
функций.
Показательной в этом смысле
является линейная задача, к изучению которой мы переходим.
6.4. Линейные
задачи
оптимального
управления
Среди управляемых систем, пожалуй, самое широкое примененис в различных областях тохники находят так называемые линейные управляемые системы, т.е. автономные
системы с линсйным законом движения
5 = Аж-
Ви,
(6.44)
где ® = (21, ... в) и = (в, №); А= (а и В= (4) —
числовые матрицы типов их и пхг соответственно.
Наиболсс популярной в классе линсиных управлясмых систем является задача отттимального быстродействия,
т.с. задача оптимального управления, в которой в качестве
целевого функционала взято время достижения системой некоторого состояния (5) = 27. Это иллюстрируют системы автоматического
управления,
которые
поддерживают
заданный
режим (или заданное движение) объекта, преодолевая действие
различного рода возмущающих сил. Для таких систем обычно составляют уравнения возмущенного движения [УПП
вида
=
(ти),
6.4. Линейные задачи оптимального управления
185
в которых фазовые координаты х; представляют собой отклонения координат объекта от их значений в заданном режиме
(возмущения),
причем в начальный момент времени # пола-
гают, что
х(н) ==! 20.
Задачей
системы
управляющих
управления
воздействий,
(6.45)
является
которые
обеспечение
в кратчайший
таких
срок воз-
вращают систему в заданный режим, т.е.
ж() =0.
(6.46)
'Так как отклонения системы от установившегося режима обычно малы, то правые части уравнений возмущенного движения
можно
пользуя
приближенно
формулу
заменить
Тейлора.
линейными
Полученные
выражениями,
линейные
вида (6.44) обычно называют уравнениями
первого
ис-
уравнения
прибли-
жения [УПП для возмущенного движения.
Рассмотрим частный случай системы (6.44), когда управленис одно, т.с. ц(7) = и( — скалярная функция, г = 1. Такая
система имеет вид
п
=
У ‘ат:
+1
м,
9—1
(6.47)
ть
и =
›
ау
+ вым.
7=1
В качестве
целевого
функционала
возьмем
время
+
дости-
жения системой положения равновесия 1;(№) = 0, 1=1, п, т.е.
[2
Ца,
= ] ар ши,
(6.48)
я
а на управление ({) наложим ограничение
|] < 1.
(6.49)
186
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Попробуем с помощью вариационных методов решить линейную задачу оптимального управления, которая определяется соотношениями (6.45)-(6.49). Полагаем, что 2(Р Е
ЕС",
>], ®®), и(®) Е СН].
Задача (6.45)-(6.49) являстся частным случаем задачи (6.40),
(6.43). Как было установлено (см. 6.3), экстремум может достигаться лишь на функциях, составленных из участков экстремалей и участков границы областии управления (6.49). Что-
бы найти экстремали задачи, являющейся задачей Лагранжа в
форме Понтрягина, запишем лагранжиан
п
Из,
5, и) =1+
п
У` (0
(=
1=1
— У ‘ата
— ви) .
91=1
Необходимое условие экстремума вне границы области (6.49)
ость уравнения Эйлера (6.22), (6.23). В линейном случае систсма (6.22) преобразуется к виду
А, =-А!@1; — Азах-...- Ава,
1=Ь М,
в матричной форме она имееет вид А = —АТЛ, или
А =-^'А,
(6.50)
где А = (Л1, ..., А»); А = (а:;) — матрица системы (6.47) типа,
7х я. Второс уравнение (6.23) примет вид
У
М =-Уом(Ыь =0,
4=1
или
(В
=0,
(6.51)
где В = (1, ..., в). — столбец коэффициентов при управлении
ив (6.47).
Продифференцируем равенство (6.51):
АВ=О.
(6.52)
6.4. Линейные задачи оптимального управления
187
Исключим из этого равенства А”, используя соотношение (6.50)
и свойства операции транспонирования. В результате получим
т
ХАВ=О.
(6.53)
Снова продифференцируем (6.53) и затем исключим А", исполь-
зуя (6.50). Получим
^АВ=О.
Повторяя
операцию
дифференцирования
п — 1 раз с последую-
щим исключением А`, приходим к следующей системе алгебрао
т
ических уравнений относительно А:
ХВ=О,
ХАВ=0,
ХА?В=0,
ААВ
(6.54)
0.
Эта система имеет единственное нулевое решение в том
случае, когда ранг матрицы системы равен количеству неизвестных 7, т.е.
Ве (В, АВ, ..., АТВ) = п.
(6.55)
Случай, когда выполняется соотношение (6.55), являстся
основным в теории линсиных управлясмых систем (без фазовых
ограничений). Это соотношение
условие управляемостти такой
управляемой, если для любых
яний системы существует хотя
*В литературе
вание.
термин
— необходимое и достаточное
системы. Систему называют
начального и конечного состобы один допустимый процесс,
„управляемая
система“
имеет
различное
толко-
188
6. ВАРИАЦИОННЫЕ МЕТОДЫ
переводящий систему из заданного начального состояния в зал
данное конечное состояние. Свойство управляемости системы
означает, что задача управления для этой системы имеет решение при любых краевых условиях.
Таким образом, в случае выполнения соотношения (6.55)
уравнение
Эйлера имсст единственное решение
А(
=0.
Это-
му решению соответствует лагранжиан Ё(5,2,и) =1, который
совпадаст с лагранжианом задачи, получающейся из исходной
отбрасыванием
дифференциальных
связей
(6.47).
Однако
ли-
нсйная задача (6.45)-(6.49) без дифференциальных связсй (6.47)
бессодержательна, и экстремалей не имеет.
Но если экстремалей не существует, то экстремум может
достигаться лишь на функции, график которой целиком находится на границе области, т.е. либо и = 1, либо и = —1.
Таким
образом, либо оптимальное решение соответствует постоянному управлению,
либо
его можно
найти,
только
если
считать
допустимыми разрывные управления 1(#) (далее мы покажем,
то задача, имеет решение в классе кусочно непрерывных управлений).
Как видим, вариационные методы, работающие в
классе непрерывных функций, в случае линейной задачи не по-
зволяют, вообще говоря, найти решение. Расширение класса
допустимых функций требует изменить и методы решения задам.
Даже если рассматривать кусочно непрерывные управления и использовать напрашивающееся допущение, что оптимальное управление принимает
х
лишь два значения +1, мы решения задачи все-таки не полу1 ------- г
—
О
чим. Чтобы полностью опредеп
С
Е|
т:р
112
кит
т
р
'}
ти
бт
Рис. 6.7
р
т
лить
кусочно
ь
постоянное
упра.
вление и(Е), нужно указать точки 1, в которых управление меняет значение на противоположное (рис. 6.7).
6.5. Обсуждение методов вариационного исчисления
189
6.5. Обсуждение методов
вариационного исчисления
Из изложенного в 6.3 и 6.4 ясно, что применение методов
вариационного исчисления в задачах оптимального управления
приводит к различного рода трудностям.
Проанализируем
причины этих трудностей.
Задача Лагранжа в форме Понтрягина наиболее близка к
задаче оптимального управления. С помощью метода Лагранжа для нее удалось получить полную систему необходимых
условий и тем самым решить задачу в классе гладких функций
2(1) и непрерывных управлений ч(.
Но при этом уравнения Эйлера для управлений вырождаются в алгебраические
соотношения
((6.23) или (6.33) ).
Эти алгебраические соотно-
шения представляют собой необходимые условия экстремума,
функционала и могут и не иметь решений, как, например, в
линейных задачах. В этом случае задача, оказывается неразрешимой: функционал не достигаст экстремумов в рассматривал
емом классе функций.
Что можст дать расширенис класса допустимых функций?
В связи с этим интересно сравнить задачу Лагранжа и задачу
оптимального управления в случас, когда в последней нет
ограничений на управление и фазовые координаты, т.е. когда,
И =В" и б = Е". В этом случае каждый допустимый процесс
(=(, (0)
задачи Лагранжа является таковым
оптимального управления.
Обозначим через Л функционал
(6.16)—(6.18),
т.е.
А[ж,и| = Иж],
(6.17)
и для задачи
в задаче
Е СЧН,Ы],
Лагранжа
чЕСН,Ы],
а через О — этот же функционал в задаче оптимального
управления*: О[,ч| = 5, м],
Е С[Н,12|,
щЕКС[Ы, 1]. Очевидно, что функционал А является сужением функционала ().
Пусть в обеих задачах ищется наименьшее значение целевого
*Обозначение КС[! ‚>| относится к классу функций, кусочно непрерывных на отрезке [#1, &].
190
6. ВАРИАЦИОННЫЕ МЕТОДЫ
функционала по вссму классу допустимых управляемых процсссов, т.е. не локальный, а глобальный минимум. Так как А есть
сужение О, то ШЁА[, и] > шРО[е,и]. При определенных дополнительных предположениях относительно функций /* (1=0, п),
©,
1,
достаточно
естественных
в постановке
задачи,
можно
утверждать, что на самом деле шЁА[т,и] = шШЁО[ж,и]. Например, в простейшем случае дифференциальных связей 1 = и
указанное равенство будет выполняться, если лагранжиан зал
дачи непрерывен по совокупности переменных”.
Если в рассматриваемой задаче шЁЕА[®,и| > шШ!О[®, и], то
очевидно, что существование решения в одной задаче не связано с сушествованием решения в другой.
Если
= шРО[,ч]|, то возможна одна из трех ситуаций:
а) задача
Лагранжа
имеет
решение.
ШЁЛ[ж,и] =
‘Тогда, это
решение
одновременно является решением и задачи оптимального управления (правда, возможно, не единственным}, так как решение
задачи Лагранжа является допустимым процессом для задачи
оптимального управления, дающим минимальное значение целевого
функционала;
6) задача Лагранжа нс имсст решения, а задача оптимального управления имеет, т.е. точная нижняя грань значений
функционала, достигается на, управляемом процессе, в котором
либо ж(+) не является непрерывно дифференцируемой, либо и ($)
не является непрерывной;
в) ни задача Лагранжа, ни задача оптимального управления
не имеют решения, т.е. точная нижняя грань значений целевого
функционала не достигается и на более широком классе допустимых процессов.
Пример
6.3. Следующая задача иллюстрирует ситуацию 6):
1
Печ] = [а — и?
шпь
&=и
(0) =2(0 =0.
0
** Доказательство
мин С.В.
см.
в книге:
Алексеев
В.М.,
Титомиров
В.М.,
Фо-
6.5. Обсуждение
методов
вариационного
исчисления
„уж!
д
риац;
Точная нижняя
кусочно
грань значений функционала
гладкой
функции
1^({)
191
достигается
с соответствующим
на
ей отти-
мальным управлением и” (1):
0
<< 5;
<#<
^
<
5
1-Ь
1.
2?
< 1.
В классе гладких функций точная нижняя грань функционала, равная нулю, не достигается, так как нулевое значение
функционала, возможно лишь при и(#) = 1 или при и(1) = —1. Но
при этом х($) = ++ С, что противоречит краевым условиям.
В этой задаче переход от класса гладких к классу кусоч-
но гладких фуниций означает переход от задачи Лагранжа к
задаче оптимального управления. Заметим, что в рассматривал
емом случае ШЕЛ = шРО =0.
Действительно,
так как значения
пелевого функционала, неотрицательны, то в силу неравенства,
ШЕЛ > ШЁО
достаточно
показать,
что ШЁЛ = 0.
Рассмотрим
последовательность кусочно гладких управлений
1,
в, ($) =
где п = 2, 3,...
О<Е< 2ЕЕ,п
1
1
1
(5—1),
5
-1, у
ТЕ,
2
п
Каждому
из этих
1
1
ЗЕ<ЬТЯ;
управлений
соответствует
й
допустимая функция т„(® = Ги„(Р 4%, которая удовлетворяет
0
условию 2%(1) =0 в силу симметричности графика функции
иъ(Р) относительно точки (1/2, 0). При этом
1
=
Таким
Полн]
образом,
= [4-м
0
а
=
Г, — 0 при п -—+ со.
(1-2
1
(5-9
2.2
) &< =.
192
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Пример
6.4.
Ситуацию
в) иллюстрируст
следующий
при-
-
(0) =2(1) =0.
мер Больца:
1
Це]
= Г(а-му
+22)
ть
&=и,
0
В этой задаче решения нс существуст.
ная
Действительно,
нижняя
грань
точ-
значений
функционала, в классе кусоч-
но гладких функций равна
нулю, так как значения целевого функционала, неотрицательны, а нулевое значение достигается в пределе по
следующей последовательности кусочно гладких функ-
ций (рис. 6.8):
(8) = |] увозит”
4
й=1,2,...
0
Последовательность
к нулю,
конечного
при
этом
числа,
функций
{л.(#)} равномерно
и2(®) = 22 (Ё =1
точек.
всюду
сходится
[0, |,
кроме
Значит,
1
1
Це»,
на
= (амф
+»
и
[20 +}4—0.
о
0
Однако нулевое значение не достигается функционалом ни
на одной кусочно гладкой функции.
Для т( = 0 (К =Еби
Пт,и] =1. А если #(® -20 хотя бы в одной точке, то в силу
непрерывности этой функции
1
Пи
>
[=
|
@&>0.
+
6.5. Обсуждение
методов
вариационного
исчисления
„уж!
д
риац;
193
Мы сравнили задачу Лагранжа и задачу оптимального
управления с точки зрения глобального экстремума пелевого
функционала. Чтобы провести такое сравненис для локальных
экстремумов, нужно ввести соответствующее понятие для задачи оптимального управления.
Допустимый пропесс (2* (1), м” (К) будем называть локально оптимальным в задаче с фиксированным отрезком [Н , |,
если найдется такое в > 0, что для всякого допустимого процесса (2(1), (1), удовлетворяющего условию
|2 — =
<,
тЕН,Ы
(6.56)
верно неравенство
Де] > [*,и"|.
Если отрезок
[Н, |
не является
фиксированным,
то каждо-
му допустимому процессу соответствуют свои моменты времени Н и.
В этом случае локально оптимальным процессом
будем называть допустимый процесс (2*(#), и*(1)) с промежутком
времени
[#й,®|,
для
которого
найдется
такое
& > 0, что
для любого процесса, (5(#), и(#)) с промежутком времени [#1 15],
удовлетворяющего условиям
и-а|
<Е,
6-—ы
<=,
|щ“(-ж(|<е
приз [Н,&П[И,6|
выполнено неравенство
Па,и] > Пж”,и“].
Отметим, что в задаче Лагранжа, как и в любой другой за-
дачс вариационного исчисления, различают сильный экстремум
и слабый экстремум. Точка слабого экстремима (2*(1), и* (1)
доставляет экстремум целевому функционалу среди всех допустимых процессов (2(), и(®)), для которых 2(Р) попадает
в нскоторую слабую =-окрестность щ*(Ь, а и() попадает в
некоторую сильную в-окрестность и” (®. Локально оптимальный процесс в задаче оптимального управления ограничивает
194
6. ВАРИАПИОННЫЕ
МЕТОДЫ
сравнение некоторой сильной окрестностью 2” (#), а на управления ограничения не накладываются вообще. Это соответствует
сильному экстремуму в задаче Лагранжа. Поэтому могут возникать ситуации, когда локальное решение задачи Лагранжа,
не является оптимальным процессом соответствующей задачи оптимального управления. Если же в задаче оптимального
управления найден оптимальный процесс с непрерывным управлением, то (в рамках предположений относительно функций,
входящих в задачу) этот процесс будст являться сильным минимумом в задаче Лагранжа, т.е. давать ее локальное решение.
Итак, задача оптимального управления является в указанном смысле расширением задачи вариационного исчисления.
Однако если область И допустимых управлений открыта, то
ничего нового в действительности мы нс получим. По-настояшему новой задача оптимального управления становится, если
в ней присутствуют ограничения в виде нестрогих неравенств
(например, |и;| < М,
=1,г), когда область управления И является замкнутой. Именно этот дополнительный элемент делает
задачу оптимального управления существенно отличной от вал
риационной и приводит к необходимости нового подхода к ее
решению, связанного с изменением понятия допустимой вариации. Не углубляясь в детали такого подхода (0б этом речь
далее),
отметим
лишь
очевидные
факты,
вытекающие
из за-
мкнутости области управления.
Вернемся к задаче Лагранжа (6.16)—(6.18). Введение множителей Лагранжа позволяет рассматривать переменные вспомогательного функционала (6.19) как независимые (множители Лагранжа при этом считаем фиксированными функциями).
При таком подходе задаче об экстремуме функционала /*[2,и]
можно поставить в соответствие две задачи
П[, и*] > ех,
П[*, и]
еж.
(6.57)
Другими словами, если 2*(#), и*(Р) — решение задачи [жи]
—ехт, то 2*(
решение первой задачи в (6.57), а ч*(Р
6.5. Обсуждение
методов
вариационного
исчисления
„уж!
д
риац;
195
решение второй задачи в (6.57). Поэтому можно объединить
необходимые условия двух этих задач, чтобы получить необходимые условия в задаче об экстремуме функционала Г\[®,и|.
Однако в рамках задачи оптимального управления с замкнутой областью управления 0 система нсобходимых условий
(6.23)
уже
и(К ЕО
не являстся
полной,
так как нс учтено
ограниченис
(множители Лагранжа позволяют учесть ограничения
только в виде равенств). Изменяется характер второй из двух
задач (6.57). Она формулируется следующим образом:
|
] ра
ви)
пни, иЕКСН,Ы, ие
ле,
}
(6.58)
и
Необходимое и достаточное условие экстремума в сформулированной задаче состоит в следующем. Кусочно непрерывная
функция и” (#) со значениями в замкнутой области 0 доставляет минимум в задаче (6.58) тогда и только тогда, когда всюду
на отрезкс [#1 12], кроме точек разрыва, и*(Й, выполнено соотношение
о.
„ИВ,
(рЕС
262
*
ВЕ
—_
(#),2*(®,ч(®)
=Г(6
В канонических переменных
дующим образом:
%
.х
(9,0,
*
и“).
то же соотношение выглядит
сле-
„вах, На", р" (0) = И (2 9." 9,м" (0). (6.59)
ифеЕН
Для
получения
полной
системы
условий
к
(6.59)
добавить необходимые условия экстремума, для задачи
Г,
и]
шш
жеСНН,ы],
которые в канонических переменных имеют вид (6.32).
нужно
196
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Условия
(6.32)
и (6.59)
фактически
представляют
собой
основные соотношения в примите максимума Понтрягина.
Полная формулировка этого принципа будет изложена далее
(см. 7).
Если на управление и(+) нет никаких ограничений, то необходимым условием максимума функции Понтрягина Н является обращение
в нуль производных этой функции
по управлени-
ям, что и отражено в уравнениях (6.33). Но если на управление
и наложены
нестрогие
ограничения
(т.е.
Г замкнуто),
то мак-
симум функции Понтрягина, может достигаться как внутри (7
(тогда выполняются равенства (6.33) ), так и с выходом на границу. Это значит, что уравнения (6.33) в случае замкнутой
области И следует заменить более общим условием — условисм максимума функции Н по управлениям. Именно эта идся,
высказанная в 1956 г. Л.С. Понтрягиным*, и послужила основой всех дальнейших работ, связанных с развитием принципа,
максимума. Обоснование этой идси было дано много позжс*”.
Вопросы
6.1.
Запишите
задачи Лагранжа
полную
и задачи
систему
необходимых
в форме Понтрягина
условий
с подвижными
для
концами
ни:
$2
И
п
Ут?
=
Е — ехёт,
#=Ф(=)+С(т)и,
т
ж()=т,
в)
т
==.
т
Здесь х = (21,..., и); и=(и1,...
4.) ; ф(&) = (ф1(1),....Фи(<)) ;
С(*)
—
матрица
начального
и
типа
конечного
п хх;
ж',
2?
—
известные
векторы
состояний.
*См.: Боитянский В.Г., Гамкрелидзе Р.В., Понтрягин Л.С.
**См.:
Е.Ф.
Понтрягин
Л.С.,
Болтянский
В.Г.,
Гамкрелидзе
Р.В.,
Мищенко
Вопросы и задачи
197
6.2. Найдите экстремали в следующих задачах Лагранжа:
п/2
а)
[ и
—ехт,
#1 = о, 42 = фа,
1. (0) =1;
|
п/2
6) Дега
[1 (0)]* —}ехы,
=,
деф
и;
0
1
в) [аз
[2>(0)]
сх,
21=12, 22 = жи,
11(0} =1;
0
1
г) Гани)
о
ав
ежи,
&=е-и,
2(1) =1.
6.3. Найдите кратчайший путь между
и В(3, 2) на плоскости при условии, что
выполняется неравенство 1? + у? >24.
точками А(—3, 0)
вдоль этого пути
7. ПРИНЦИП
МАКСИМУМА
В 1956 г. Л.С. Понтрягин, В.Г. Болтянский, Р.В. Гамкрелидзе и Е.Ф. Мищенко предложили метод, который обобщил
методы классического вариационного исчисления в случае задач, в которых управляющие воздействия описываются кусочно
непрерывными
ций
функциями,
принадлежит
а множество
замкнутому
значений
ограниченному
этих
функ-
множеству.
В
основу этого метода был положен так называемый принцит
максимума.
Принцип максимума дает необходимые условия оптимальности, которые позволяют выделить из множества, допустимых
процессов некоторое подмножество процессов, „подозрительных“ на оптимальность. В этом смысле метод решения задач
отитимального управления на основе принципа максимума, аналогичен
методам
переменных,
исследования
при
которых
функций
одного
отбираются
точки,
или
нескольких
удовлетворяю-
щис необходимым условиям, а затем каждая из отобранных
точск анализирустся, например, с помощью достаточных условий. В рамках теории оптимального управления необходимые
условия хороши тогда, когда с их помощью удается выделить
небольшое количество процессов, которые могут быть оттимальными. Принцип максимума для широкого круга задач дает
возможность определить единственную траекторию, которая
может быть оипимальной. Если в конкретной задаче из какихлибо соображений (например, из содержательного смысла, этой
задачи)
то
извсстно,
выделение
оптимальное
единственной
оптимальность,
Первое
что
управленис
траектории
В
существуст,
подозрительной“
на
дает решение задачи.
доказательство
принципа
максимума
дал Р.В.
Гам-
крелидзе для линейных задач оптимального управления.
Он
построил полную теорию линейных систем управления и до-
7.1. Автономная
система управления
199
казал достаточность принципа максимума для таких
Таким образом, для линейных задач оптимального
ния принцип максимума, — необходимое и достаточное
оптимальности.
В общем нелинейном случае принцип максимума
В.Г. Болтянский,
систем.
управлеусловие
доказал
который построил и основы нелинейной тео-
рии оптимального управления.
7.1. Автономная
система
управления.
Формулировка
принципа
максимума
В этом разделе мы сформулирусм принцип максимума для
задачи оптимального управления в предположении, что фазовые ограничения отсутствуют, т.е. для системы с законом
движения
# =У(т,и),
где фазовый вектор 2(®) = (ти ($,
(7.1)
..., (1)
может принимать
любые значения из Е”.
Считаем, что на вектор управления и(®} = (и (В, ..., и» (4))"
наложены ограничения
иеЕкКсС[Н,
где
И
произвольное
может
быть замкнутым
|,
НЕО,
множество
ЕН,
в №
и ограниченным),
(в
частности,
(7.2)
оно
а вектор-функция
(в,и) = (ДР (в,
ми), ..., Ра, и)" непрерывна по совокупности
всех переменных и непрерывно дифференцируема по части переменных х [\]. Как и раньше, управления, удовлетворяющие
(7.2), будем называть допуспиьмыми, а пару (%(#), и(®)), в которой ж(# есть решение системы (7.1) при заданном и(К, —
допустимым процессом.
Краевые условия задачи зададим следующим образом:
тн) =! =
(21, ..., 21)",
(6) ==” = (21, .... 12).
(73)
200
7. ПРИНЦИН МАКСИМУМА
Требуется
найти
такое
допустимое
управление
'(#),
которое
переводит систему (объект) из фазового состояния (НН) ==
в фазовое состояние 2 (1) = 22, причем соответствующий допустимый процесс (5(#), и(#)) доставляет минимум функционалу
Цели] = || (м0) 4,
(1.4)
где функция {0 удовлетворяет тем же условиям, что и векторфункция [.
Будем предполагать, что интервал времени управления
+2 — Н произвольный.
Это предположение
означает,
что каждо-
му допустимому процессу, при котором система переходит из
состояния 21 в состояние 27, соответствуют свои моменты времени Ни
р.
Поставленная
таким
образом
задача
это задача с фиксированными
концами
(точки
т Ги
22 фиксированы) и свободным временем.
Как и рансе, управление и*(Р), дающее
решение поставленной задачи, будсм называть опимьмальным
управлением, соответствующую траекторию 2*(Р} — опти-
мальной траекторией, а процесс (2*(#), м*(1)) — оптимальным
процессом.
Экстремальная
задача
(7.1) (7.4) по форме похожа, на, за-
дачу Лагранжа (6.16) (6.18), но отличается от нее наличием
ограничения на управление ($) ЕП
и расширением класса, д0пустимых функция. При этом нс требустся, чтобы существовали частные производные функций /0,..., [” по переменным му.
Остановимся на некоторых простейших свойствах опти-
мальных
ющих из
системы
свойства
управлений и траекторий, непосредственно вытекапостановки задачи. Прежде всего, из автономности
(7.1) и интегранта функционала (7.4) следует, что
управлений не изменяются при сдвиге вдоль оси $
(рис. 7.1).
Другими
переводит
систему
словами,
из
если управление
состояния
2!
в
состояние
и(К), ЕЕ [н, 1],
2”,
а
пелевой
7.1. Автономная система управления
201
функционал на соответствующем допустимом процессе принимает значение Г, то при любом А управление и(+— 1),
Е
Е [Н +РА, № +1], также переводит
систему
из
состояния
2!
В
он
состояние 27, а целевой функпионал при этом также будет
иметь
чает,
значение
то
Г.
решение
Это
+в
Рис.
озна-
задачи
не
БВ
единственно.
1
7.1
Но
мы
можем
из
оптимальных управлений выбирать такое, для которого #1 имеет фиксированное положение, а точка 12 свободно перемещается
по оси времени.
Далее
будем считать,
что Н фиксировано,
а 12
свободно меняется.
Пусть =, ..., ж^ — конечный набор точек фазового пространства, для которых существует набор таких управлений
и2 (1). .... чк(®, что управление и;(#) переводит систему из
состояния 2’ `1 в состояние 5’ и дает целевому функционалу
значение 1, 4=2,К.
Тогда существует управление 4#(#), переводяшее систему из состояния х! в состояние хи дающее
целевому функционалу значение Г = 2 +...- 1.
но,
так
как
управления
можно
сдвигать
вдоль
Действитель-
оси
времени,
то
можно считать, что интервалы времени управлений 14; (#) примыкают друг к другу, так что управление 44; (+), 1=2, к, задано
на отрезке
[1,8],
причем
Н<Ь<...<в
гда управление и(#), на интервале
(рис.
[&_1, В] совпадающее
и
(Е)
м
'
(8)
Я
т!
ЗО
А
о]
|
[2
вм
7.2).
@)
гори
РЯ
5,
1
Тос м, (#)
202
7. ПРИНЦИН МАКСИМУМА
и в целом
заданное
на отрезке
[#,|, переводит
систему
из
состояния <! в состояние т” и придает функционалу значение
Ь-...+1.
Отметим,
что указанная опсрация „объединения“
управлений невозможна в классе непрерывных управлений, так
как в точках стыка & объединенное управление и(#) может
имсть точки разрыва первого рода (см. рис. 7.2).
Если и* (Е [НВ], — оптимальное управление, то любой
его участок [ту 72], &й Зл! < 72 <, также является оптимальным управлением. То же верно для оптимальных траекторий.
Пусть 2*(®) — ‚соответствующая ‘и*(Р) оптимальная траектория, “(6
) ==', =*() = <2. Рассмотрим произвольный уча
сток [т, 72]С , 12], и пусть 23 = 2* (71), 2“ = 2*(72). Утверждается, что интеграл
72
] (га
т
имеет наименьшее
ний,
переводящих
значение
систему
среди всех допустимых управлеиз
положения
23
в
положение
2“.
Пусть значения целевого функционала, для управления и*({) на
участках
[Н,ти|,
[ти, 72|, [72, |
есть соответственно
Л,
412, №.
Тогда, управление и*({) на всем отрезке [{1, #2] придает целевому функционалу значение Г = Л + № + 13. Если управление ч/^ (1)
не является оптимальным на [ту, 72|, то существует управление
%(#), переводяшее
систему
из положения
3
в положение
хи
придающее целевому функционалу значение Г, < 15. Но тогда,
управление, составленное из управления и на участках [Н,т|!|,
[т2, +2] и управления ®(#) на участке [т1, 72], переводит систему
из положения т! в положение 5? и придает целевому функционалу значение Г +,
управлением.
+В
< Г т.е. ч* (К не является
оптимальным
Аналогичные рассуждения можно провести для
фазовых траекторий.
Перейдем теперь к основным соотношениям, необходимым для того, чтобы сформулировать принцип максимума.
7.1. Автономная система управления
203
Включим фазовое пространство Е” в (п-1)-мерное пространство В+", присосдинив к координатам 11, ..., Хи дополнитсльную координату 59. При этом потребуем, чтобы функция 250 (#)
удовлетворяла соотношению
$
10(#)= |
(т, м).
Тогда, функция 20(#) будет решением уравнения
4х0
т
—_
Г (т, и).
Присоединим это уравнение к системе (7.1):
ай
г
где & =
д
— (т, м),
(20, =)" = (10, ту, ..., т);
(7.5)
=
(1,1,
..., 1").
За-
метим, что правые части системы (7.5) не зависят от 20.
Целевой функционал Г (7.4) рассматриваемой задачи теперь
можно записать в виде /[2,4] = 20(#2), т.с. он оказался равным
конечному значению координаты 50. Рассматриваемая задача тем самым свелась к задаче выбора такого допустимого
управления
(!),
которое
осуществляет
переход
точки
&(®)
в
(п-+1)-мерном пространстве из положения &' = (0, =)" в бли—Щ
т
У
ы
жаюшую точку &? = (25, =?) на прямой, параллельной оси 00
и проходящей через точку (0, =?) (ближайшая точка в смысле
минимума, координаты 20, рис. 7.3).
Рассмотрим вспомогательную систему
Фр: _
и >
Е
907“ (®,м).
> и
Е
{=0, п,
(7.6)
а=0
относительно неизвестных функций 1; (#7). Эту систему иногда
называют сопряэженной системой к системс (7.5), а персменные 4; — сопряженными переменными.
204
7. ПРИНЦИН МАКСИМУМА
Хх
Рис.
7.3
Если (+) — некоторое допустимое управление, (+) — соответствующая этому управлению фазовая траектория, то, подставляя эти функции в правые части уравнений (7.6}, получим
линейную однородную систему дифференциальных уравнений с
известными кусочно непрерывными коэффициентами. Поэтому
при любых начальных условиях эта система имеет единственное
решение [УГ]. Так как функции /° (т. и), а = 0, п, не зависят
от 50, то первое уравнение системы (7.6) имеет простой вид
ао _
а
из него получаем 40 = сои.
Составим функцию Понтрягина
Н(Ф, ги) — Уфо (вьи) = (8, (а,и)),
— (ТЛ)
где $ = (Чо, -.-, ф»)
вектор сопряженных переменных. При
фиксированных значениях Ф и х функция Понтрягина ссть
функция от че 0.
Точную верхнюю грань значений этой
функции обозначим через М ($, 2):
М($,=) = эр Н(Ф,ж,и).
еб
7.1. Автономная
система управления
205
Если точная верхняя грань значений непрерывной
функции
Н достигается в некоторой точке области управления И, то
М ($, =) является максимумом значений функции Н при фиксированных Физ.
Теорема 7.1
и*(®), Ее [н.12],
(принцип максимума).
и соответствующая ему
рия т”(Р) оптимальны,
то найдется
Если управление
фазовая траекто-
такая ненулевая
вектор-
функция 2*(0), соответствующая функциям 5*(Р} и и*(0) (т.е.
удовлетворяющая сопряженной системе (7.6) при подстановкс
в нее 2* (1) и и*(®) ), что:
1° при каж дом значении { © [Н, №] функция Н($* (1,2 (8,и)
от переменных
и достигает
максимума
в точке
и = и* (1:
2° в конечный момент времени #> выполнены соотношения
(6) <0,
М(9*(), 2) =0.
#
В заключение отметим, что системы (7.5) и (7.6) с помощью
функции Понтрягина могут быть записаны как гамильтонова,
система следующим образом:
—_Е-
&
ОИ
Га
=
д’
и
=
9.
7?
7:
(73)
бя
дт;'
ВЫ
Очевидно, что если вектор-функция 2(®) удовлетворяет системе
(7.1), то она удовлетворяет и первой подсистеме в системе (7.8),
поскольку всс уравнения, кромс первого, в этой подсистеме как
раз и образуют систему (7.1).
Замечание
стеме
(7.8)
7.1.
и условию
Если (1),
1°,
то
2(1), и(®) удовлетворяют
^
функции
40()
си-
и М(Ф
(К, =()
206
7. ПРИНЦИП МАКСИМУМА
переменного # являются постоянными. Действительно, как уже
было отмечено, из системы (7.6) следуст, что 420 = с0п%. Покажем, что функция М (Ф (4), =()) постоянна, предполагая, что
она имеет производную", которую можно вычислять по правилу дифференцирования
сложной
%(#) и рассмотрим функцию
функции.
Зафиксирусм
дифференцировании
М(,=)
(7.8):
+2 ЭМ 4$;
о
При
и
М ($ (,2(#)) переменного #. Вы-
числим производную этой функции в силу системы
им => Эм Г
($)
эман
амодн
ео
да; 04; — 104
учтено,
что
де;
функции
9
(7.9)
Н (Ф, т, и)
и
не зависят от хо. Так как
эм _дн
дах
=
ом
_ дн
ду’
94;
=
9%’
то из (7.9) получаем
>
ОНОН
дж;
> ОНОН _
04; дхр
Из условия постоянства, функций 60 (#) и М($
дует, что условие 2° в теореме
момент времени {Е [#, #:].
7.2. Обсуждение
(4), 2(4)) сле-
(7.1) можно проверять в любой
принципа
максимума
Остановимся на достаточности соотношений принципа максимума для решения поставленной задачи отипимального управления. Набор условий теоремы 7.1 в некотором смысле явля* Доказательство
почти
всюду
Мищенко
Е.Ф.
см.
существования
Понтрягин
Л.С.,
у функции
Болтянский
М ($ (,%(Р))
В.Г.,
производной
Гамкрелидзе
Р.В.,
7.2. Обсуждение принципа максимума
207
ется полным. Он позволяет из всех траекторий, проходящих
через две заданные точки 2! и 17, выделить отдельные (или
одну) траектории, среди которых находится оптимальная траектория, если, конечно, она, существует.
Действительно, вся совокупность траекторий определяется
2п +1
дифференциальными
уравнениями
(7.8}
(если
опустить
первое уравнение т = /0(т,и)) и г алгебраическими уравнениями, которые дает условие 1? теоремы 7.1.
Например,
если максимум функции Н достигается во внутренней точке, то необходимым является обрашение в нуль г частных
производных. Если максимум достигается на (7—1)-мерной поверхности, лежащей на границе областии управления 0, то по
методу Лагранжа для поиска условного экстремума функции
многих переменных [У] получаем г уравнений, приравнивая
нулю
нение
частныс
связи
производные
при
функции
дополнительном
Лагранжа,
неизвестном
и одно
—
урав-
множителе
Лагранжа.
После исключения множителя Лагранжа, остается
7 алгебраических уравнений. Аналогичен общий случай, когда,
максимум достигается на К-мерной поверхности, расположенной на границе (7.
Итак, всего имеется 2 + 1+ т уравнений, связывающих
21 + 1+»
переменных $, ж, и. Так как из этих соотношений
7 — алгебраические уравнения, решения зависят от 2% +1 параметров — начальных условий. Один из параметров является
несущественным,
поскольку функция Н однородна относитель-
но переменных Фо, а все функции Фо(Р) определены лишь с
точностью до общего множителя. Кроме того, один из парамстров опредслястся
условием
в момент
времени
й
(или в любой
другой момент):
шах Н(Ф(Н).ж(н). и) = 0.
иЕИ
Таким образом, вос многообразие решений зависит от 2% — 1
параметров. Время #2 также является параметром. Следовательно, искомая оптимальная траектория, если она существует,
208
7. ПРИНЦИН МАКСИМУМА
определястся 2% параметрами. Чтобы определить эти парамстры, мы имеем п начальных условий т(Н) =! и п конечных
условий 1(12) ==”. Значит, есть полная система условий которая позволяет найти одну или несколько потенциально оптимальных траекторий.
Однако пока нельзя утверждать, что траектории, найденные в результате решения упомянутой системы соотношений,
являются оптимальными:
использованные условия являются
необходимыми, но не достаточными. Требуется проверка найденных
траскторий на оптимальность.
В простейшем
случас,
когда выявлена только одна трасктория, & из каких-либо соображений известно, что оптимум существует, можно утверждать, что найденная траектория и есть оптимальная.
Если принципу максимума удовлетворяют несколько траекторий, то для выявления среди них оптимальной нужны дополнительные условия. Иногда удается отделить посторонние
траектории, сравнивая значения целевого фунициюнала. Заметим при этом, что оптимальная траектория может быть не
единственной, а отброшенные траектории, не являясь оптимальными, могут оказаться локально оптимальными.
Сравним принцип максимума с условиями оптимальности,
вытекающими из классического вариационного исчисления.
Для этого вернемся к задаче Лагранжа в форме Понтрягина
(6.16)-(6.18).
Остановимся на частном случае, когда правые
части уравнений (6.16) и интегрант целевого функционала
(6.17) не зависят от & правый консц $2 отрезка, [#1 , #2| свободен,
а краевые условия (6.18) имеют вид (7.3), т.е.
(7.10)
В этом случае задача (6.16)
(7.3), (1.4).
(6.18) преобразуется к виду (7.1),
7.2. Обсуждение принципа максимума
Запишем
вспомогательный
функционал
(6.19).
209
С учетом
(7.10) имеем
[
Ген
т
[ми
Н
где (жи)
п
екы)
У
=1
бод)
(7.11)
3=1
= 10 (в,и) А" (# — Г(в,и)).
В канонических переменных необходимые условия оптимальности, полученные с помощью метода Лагранжа, имеют
вид
(6.32), (6.33).
К ним следует добавить
условия
трансвер-
сальности (6.34), (6.35):
РКН)=иь
(7.12)
1ЕЪп,
РИВ)=-фи,
и, учитывая свободное изменение {2, соотношение (6.29) для
К =2, которос с учетом равенств р; = А; $ =1 п (см. (6.31) }. в
канонических
псременных
принимаст
вид
Аве) бои бь)) = УСрць)ав) = 0,
где (ж(#), ч(#)) — точка экстремума функционала.
по формулам
(6.31) к функции Понтрягина
Н(®(ь),р(2),
и (Ъ))
=
0.
Переходя
Н, находим
(7.13)
Здесь р(Р} — вектор канонических переменных, соответствующих точке экстремума (2(®, и(1)).
Соотношения (6.32), (6.33), (7.12), (7.13) представляют собой необходимые условия экстремума функционала в задаче
Лагранжа, полученные вариационными методами. Отметим,
что в рамках рассматриваемой задачи условия (7.12) являются бессодержательными и для полного решения задачи (7.1),
(7.3), (7.4) достаточно систему дифференциальных уравнений
первого порядка (6.32) относительно 2т неизвестных функций
210
7. ПРИНЦИН МАКСИМУМА
дополнить 2п краевыми условиями (7.3). Таким образом, полу-
чаем полную систему необходимых условий (6.32), (6.33), (7.3),
(7.13) для решения задачи Лагранжа в форме Понтрягина с
дифференциальной связью (7.1) и пслевым функционалом (7.4).
Сравним эти условия с условиями принципа максимума в
рамках теории оптимального управления. Очевидно, что функция Понтрягина (6.31) совпадает с аналогичной функциси (7.7),
ссли в последнси положить 140 = —1. Это всегда можно сделать
согласно условию 2° теоремы 7.1, поскольку сопряженные переменные, как уже было отмечено, определены лишь с точностью
до общего
жденной
множителя,
задаче,
а значение
45 = 0 соответствует
в которой поиск экстремума
теряет
выро-
смысл,
ибо построение решения никак не зависит от пелевого функционала. С учетом этого система (6.32) полностью эквивалент-
на системе
уравнения
(7.8), если в последней отбросить два очевидных
ат
.
р. =ЖЮ(жи)
ао
и =в
= 0.
Вектор
сопряженных
пе-
т
ременных Ф = (41, ..., фи)
имеет здесь тот же смысл, что и
т
канонические переменные р = (рт, ..., 2).
Указанное совпадение уравнений для фазовых координат
полностью
соответствует
выводам
в 6.5.
В рассматриваемой
задаче оптимального управления отсутствуют фазовые ограниченлия, а фазовые координаты х;(#) описываются непрерывными
функциями. Поэтому для них естественно ожидать выполнения
уравнений
Эйлера,
даже
сели
управляющие
воздействия
достигают ограничений и претерпевают разрывы. В последнем
случае координаты могут иметь угловые точки, а уравнения
Эйлера должны выполняться на каждой из дуг экстремали.
Сходство уравнений для фазовых координат не распространяется на управления. В вариационной задаче (задаче Лагранжа) управления не ограничиваются и описываются непрерывными функциями. Поэтому гамильтонова система (6.32) до
полной расширяется
системой
(6.33), которая также является
Эйлеровой. Уравнения (6.33) представляют собой необходимые
условия максимума для функции Понтрягина Н.
В задачах
7.2. Обсуждение принципа максимума
211
оптимального управления функции и;(+), вообще говоря, разрывны и могут достигать ограничений на управления. Поэтому
уравнения Эйлера (6.33) не применимы. Однако условие максимума функции Понтрягина как необходимое условие оптимальности сохраняется и в этом случае. При этом условие 2°
теоремы 7.1 согласуется с условием (7.13) на правом конце, которосе получено вариационными методами.
Таким образом, условие максимизации функции Понтрягина в принципе максимума является более общим по сравнению
с уравнениями Эйлера. Очевидно, что в случае, когда область
управления И есть открытое множество
необходимо
для
максимума
функции
(тогда, условие (6.33)
Н),
из
принципа,
макси-
мума следуют условия оптимальности (6.32) (6.33), полученные
методами классического вариационного исчисления.
Итак,
принцип
максимума
выглядит,
по крайнси
мерс,
до-
статочно закономерной гипотезой, непосредственно вытекаюшей из задач вариационного исчисления.
Однако, несмотря
на то что эта гипотеза почти очевидна, она долгое время не
была обоснована.
Дело в том, что при выводе необходимых
условий принципа максимума в соответствии с определением
оптимального процесса приходится сравнивать не только близкие одно к другому
управления.
В этом отличие
этих условий
от условий классического вариапионного исчисления, в этом
их сила и сложность в обосновании. Коснемся основной идеи
доказательства”.
Сначала принцип максимума был доказан для линейных систем. Идея этого доказательства следующая. Пусть некоторое
оптимальное
ли
вместо
управление
оптимального
переводит
управления
точку
взять
1
в
точку
другое
22.
Ес-
допустимое
управление на том же отрезке [#1 #2], то точка ж' перейдет в
некоторую точку 2(12). В силу свойства линейности совокупность всех построенных таким образом точек 2() образует
*Полное доказательство принципа максимума см. в книге:
гин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
Понтря-
212
7. ПРИНПИИ МАКСИМУМА
выпуклое множество М, Из оптимальности исходного управления вытскаст, что точка =? лежит на границе этого множества.
Через любую граничную точку, в том числе и через точку
х?, выпуклого множества, М можно провести так называемую
опорную гиперплоскость, т.е. гиперплоскость, которая проходит через эту граничную точку так, что множество М целиком
лежит по одну сторону от этой гиперплоскости.
Вектор %,
ортогональный к этой плоскости и направленный во внешнюю
сторону множества М, и является тем вектором, который используется при построении функции Н.
Для нелинейной системы множество всех точек (+2), получаемых с помощью всевозможных допустимых управлений, не
является выпуклым. Использование линеаризации невозможно,
так как она позволяет сравнивать лишь близкие управления, а
это не соответствует характеру задач оптимального управления. Успсх определил выбор класса управлений для сравнения
с оптимальным. При построении этого класса использовались
так называемые вариации Макшейна (игольчатые вариации).
При таких вариациях управление изменястся на небольшом
промежутке времени.
В пределе этот промежуток стягивается в точку. но изменение управления остается конечным.
Таким образом, с игольчатыми вариациями в рассмотрение
вводятся управления с разрывами первого рода. С помощью
нескольких игольчатых вариаций строится допустимое упрал
вление, отклоняющееся от оптимального лишь на конечном
числе малых интервалов времени.
Несмотря на конечность
изменения управления в каждом таком интервале, общее изменение функционала, будет мало, так как мало время изменения
управления. Если такое изменение берется относительно оптимального управления, приращение пелсвого функционала будет неотрицательным. Таким образом, хотя множество точек
2(№2), получаемых по всевозможным управлениям, и не является выпуклым, нскоторос сго подмножество выпукло, так что
возникает возможность построения опорной гиперплоскости и
ортогонального к ней вектора.
7.3. Задача быстродействия
7.3. Задача
213
быстродействия
Частным случаем функционала вида (7.4) является функционал
192
Це,
=
[@-ь-ь,
(7.14)
[о
который приводит к задаче оптимального быстродействия.
Здесь (жи) =1, и функция Н имеет вид
НЕФ+У
Чо (и).
а=1
Так как первос слагасмос не зависит от и, максимум функции Н по и реализуется одновременно с максимумом функции
Я ($. т, и) Нл
где
$ = (471, ..., 3).
Отбрасывая
ж, и)
первые
уравнения
систем
(7.8), соответствующие # = 0 (2% = /0(т,м), 100 = 0), перепишем
гамильтонову систему в виде
Ч
2
<; = Я,
й
—_
тт
Ч __ Я.)
&=Тп.
@
Так как Й=Н-,
ы
(7.15)
то
МФ, =) = зар (Фе, и) = М(Ф,2) — о.
ис
Значит, из условий 440 <Ои М($, =) = 0 следует, что М(Ф, ж)>
> 0. Предположим теперь, что функции 3/1 (В), ..., 4* (В, су-
шествование
которых
утверждает
теорема
7.1, в некоторый
214
7. ПРИНЦИН МАКСИМУМА
момент
времени
т
обращаются
в нуль:
2
(т) =0.
Тогда
Я (Ф*(Т),=*(Ф),и"($)) =0и, значит, Н($*(Т),=* (В), и*(Ф)) =
= 44% (Т). Из условий М($*,=*)
=0и М($*
(8, =*(1)) = соя
(см. замечание 7.1) получаем 4 (1) =0. А это противоречит
теореме 7.1, так как $* (1) = 0 и, следовательно, функция 2* (8
тождественно равна нулю как решение линейной системы диф-
ференциальных уравнений с нулевыми начальными условиями.
Значит, и вектор-функция Ф*(#) = (3*(#,..., 9* (1), и векторфункция $* (+) = (45 (9, 9*(®)} не обращаются в нуль ни в одной
точке отрезка [Н, #2].
Итак, из теоремы 7.1 вытекают следующие необходимые
условия оптимальности по быстродействию.
Теорема 7.2. Если (2*(#), и*(8)),
ный процесс, то найдется ненулевое
сопряженной системы
р
=>
(К,
(2
(/°).,
а=1
(#))
Е [Н, В], — оптимальчастное решение $* (1)
Фо),
а = Т,п,
такое, что:
1° при каждом значении #Е [11,42] функция Н($*(1),2*(Ю,ч)
переменного и достигает в точке и = и*(Ё) максимума:
Н(Ф*
(4), 2" (9,0) = М (29,20);
2° в конечный момент времени 1» выполняется соотношение
М (4^(),2*()) 20.
Замечание
7.2.
#
Как
и в случае
теоремы
7.1,
проверку
условия 2° можно проводить в любой момент времени {Е
[#1 #5].
Пример 7.1. Рассмотрим задачу оптимального быстродействия для системы
1
=
12
+1,
2=-и-и
(7.16)
7.3. Задача быстродействия
215
с областью управления
И = и ЕВ:
ц< Ц,
(7.17)
начальным состоянием
ж(н) =1э(Н)=0
(7.18)
и конечным состоянием
2,(6)=0,
х2()=
—4.
(7.19)
Запишсем для поставленной задачи функцию И:
2
Н($, жи) = У‘
(ти) = 41 (12 +
+ 42(-71
и).
(7.20)
@=1
Для сопряженных
систему
переменных Чл и 12 с учетом (7.8) получасм
Чл| = 42,
(7.21)
ро = —Ч1.
Согласно принципу максимума, оптимальное управление и*(1)
должно доставлять максимум функции И. Из (7.20) с учетом
(7.17) имеем
—
МР", 2”) = шах Н(Ф*
2”, и) = 41 (25 + 1) — 4521 + 95 ви,
уг
причем и^* (В) = 94 ($.
.
Найдем 45(8). Из (7.21) получаем 42 + 42 =0.
вание этого уравнения дает [УПП
Интегриро-
45 = Ст ЦЕ - С),
где СЧ > 0, С>2 — постоянные интсгрирования.
мальнос управленис имсст вид
"(9 = ву) = вая— 5).
(7.22)
Значит,
опти-
(7.23)
216
7. ПРИНЦИН МАКСИМУМА
Из представления (7.23) вытскаст следующее:
1) при оптимальном процессе управление в любой момент
времени принимает одно из своих предельных значений:
1
или —1;
2) переход от одного значения к другому, или, как говорят,
переключение, происходит через интервал времени, равный
п. Исключение можст составлять только первый участок движения: первое переключение определяется значением постоянной (> и может произойти через интервал времени, меньший я.
Эти выводы фактически исчерпывают ту информацию, ко-
торую можно получить о структуре оптимального управления
из принципа максимума. Для полного решения задачи необходимо найти постоянные С\ и С5, а для этого нужны, например,
начальные условия для функции Ф($). Но эти условия не могут
задаваться произвольно, так как однозначно определяют функцию 1/5 (1), следовательно, управление (+) = $15112 ($) и фазовую
траекторию
т(®.
Но процесс
(2(#), и(#))
должен
удовлетво-
рять краевым условиям задачи, которые еще не были учтены.
Таким образом, начальные условия для
$ (1) должны вытекать
из краевых условий задачи.
Завершить
решение
задачи
можно
следующим
образом.
Найдем совокупность траекторий, соответствующих постоянным управлениям, равным предельным значениям +1. Очевидно, что искомая траектория состоит из дуг траекторий,
соответствующих этим постоянным управлениям.
При этом
дуги траекторий стыкуются
так, чтобы удовлетворялись
кра-
свыс условия (7.18), (7.19). Тогда, всс параметры оптимального
процесса будут полностью определены.
Итак, найдем траектории, соответствующие управлению
и=1. Для этого в систему (7.16) подставим и = 1:
7
То
до
+1,
= -11-1.
(7.24)
7.3. Задача быстродействия
217
Полученную систему записывасм в симметричной форме [УП
ах
ат2
+1
фм +
или (—х, + Пах! = (12+ 1)412. Интегрируя, приходим к уравнениям окружностей с центром в точке О, (1, —1):
(1-1)? + (22+ 12 = В.
(7.25)
Движение фазовой точки вдоль любой из этих окружностей
происходит по часовой стрелке, так как по часовой стрелкс направлен вектор фазовой скорости (#1, #2) = (122 #1, -ж+1).
При этом движение происходит с постоянной угловой скоро-
стью, равной единице, так как угловая скорость & и линейная
скорость 9 при движении по окружности радиуса В связаны
соотношением
—® _ М1 +25
и=в=
В
.
Значит, полный оборот по окружности совершается за, время
2т, а за время л фазовая точка, пройдет половину окружности.
Аналогичным образом выглядит семейство интегральных
кривых системы (7.16) при и = —1. Это окружности с центром
в точке 05(—1, —1):
(1+1)? + (2+1)? = 2.
(7.26)
Движение и в этом случае совершается по часовой стрелке с
постоянной угловой скоростью 1.
Искомая
траектория
строится
из дуг окружностей
(7.25),
(7.26). Обратимся к начальным условиям (7.18). Отметим, что
через данную точку проходят только две окружности, одна
из первого
семейства,
другая
—
из второго.
Для
заданной
начальной точки — начала координат — первая окружность
описывается уравнением
(1-12 + (1241) =2,
(7.27)
218
а вторая
7. ПРИНЦИН МАКСИМУМА
—
уравнением
(+1)
+ (22+ 12 =2.
(7.28)
Фазовая точка может начать движение из начала координат
только по одной из этих окружностей
(рис. 7.4).
Хх
2
|
1
|
и=1
|
—8
1
1
2
3
х
а
ел
Рис.
7.4
Предположим, что стартовое управление равно —1 и оптиумальная траектория на начальном отрезке времени идет по
окружности
(7.28). В некоторый момент времени & = Со +лЕ
Е (0, | в соответствующей этому моменту времени точке Р) на
полуокружности ОА
(рис. 7.5} происходит переключение упра-
вления и движение продолжается по дуге другой окружности,
относящейся
к ссмейству
(7.25).
По этой, второй окружности
фазовая точка пройдет пол-оборота, и если она не достигнет за это время конечной точки, то ровно через пол-оборота,
снова, произойдет переключение управления в момент времени
0 +л, соответствующий фазовой точке Рь, и фазовая точка
продолжит движение по дуге окружности из семейства (7.26).
Так как переключение происходит через пол-оборота, то точка Р» является симметричной точке Р, относительно центра,
219
7.3. Задача быстродействия
От. Значит, Р› находится на полуокружности ММ, симметричной полуокружности ОА относительно О1, то есть на, половине
окружности
(и - 3)? + (2+1? =2.
х
2
_
1
—5
|
|
|
—4
—3
-2
/
|
О
#1
1
0
5х,
Ге,
{ О.
у
а
\
р
Р,
А,
8
\
`
—4
и
Е
ВЕ
Рис.
7.5
Из построения видно, что дуга Р.Р, какой бы ни была,
точка Р, на дуге ОЛ, не проходит через конечную точку
К(0, —4), так как наименьшее значение ординаты точки на
этой дуге равно —1- У2 > —4.
Поэтому конечный участок
траектории не может лежать на дуге РГ.
Фазовая точка,
достигнет Ро, и произойдет переключение управления, после
которого
фазовая
точка начнет
движение
по дуге окружности
220
7. ПРИНПИИ МАКСИМУМА
из семейства (7.26). Окружность
(2141)? + (22+ 12 = 10,
(7.29)
которая относится к этому семейству, пересекает дугу ММ и
проходит через точку К (0, —4). Поэтому, если переключение
произошло в соответствующей
точке дуги ММ,
то, двигаясь по
этой окружности, фазовая точка, попадет в конечную точку К.
Обратим внимание на то, что если после второго переключения движение пойдет по дуге окружности, отличной от (7.29),
то далее фазовая точка пройдет мимо конечной точки К, а
при последующих переключениях траектория разворачивается
по спирали и фазовая точка уже никогда не попадет в нужную
точку К: при каждом переключении радиус окружности возрастает и уже после третьего переключения будет превышать
У10 — расстояние от каждой из точек О1, Оз до точки К.
Итак, если стартовое управление равно —1, то искомая трал
ектория должна содержать дугу окружности (7.29) и точку
Р» переключения на дуге ММ№.
Оказывается, что окружность (7.29) пересекает дугу ММ в двух точках М(2, —2) и
С(2, 0) (см. рис. 7.5). Каждой из них соответствует траектория, удовлетворяющая первому условию принципа максимума,
т.е. управление, соответствующее такой траектории, доставляет максимум функции И. Отметим, что если Р> = М, то Ру,
будучи симметричной Р> относительно От, совпадает с началом
координат.
Это означает, что первое переключение происходит в стартовый момент времени.
Другими словами, эта,
траектория соответствует стартовому управлению 4 = 1, а наше исходное предположение, что стартовое управление равно
—1, на самом деле не является существенным. Указанная трал
ектория фактически содержит не три, а две дуги окружности,
так как дуга первой окружности выродилась в точку.
Второй вариант с переключением в точке С содержит три
дуги.
Первое переключение происходит в точке 2(0, —2).
7.3. Задача быстродействия
Дальнейшее
движение от Л) к С
221
идет по дуге окружности
(1—1)? + (42+1°=2,
на которой лежит начало координат, т.е. в процессе перемещсния от В к С фазовая точка возвращастся в начало координат.
Значит, на самом деле есть еще одна, третья траектория, которая представляет собой участок второй траектории от начала
координат до точки псреключения в точкс С'’и далес до точки К. Эта траектория также удовлетворяет первому условию
принципа максимума, но, в отличие от первых двух, соответствуст
начальному
движения
по
управлению
третьей
и =1.
траектории
Очевидно,
заведомо
что
меньше
время
времени
движения по второй траектории, потому что какое-то время
затрачивается на движение по петле. Поэтому далее вторую
траекторию можно не рассматривать. Анализ случая с начальным управлением и = 1 показывает, что других траекторий,
удовлетворяющих первому условию принципа, максимума, и зал
данным краевым условиям, нет.
Итак,
использование
принципа
максимума
выявило
две
тра-
ектории, которые удовлетворяют краевым условиям поставленной задачи. Первая 2*(Р) заключается в движении по дуге ОМ
окружности
(7.27)
и последующем
после переключения
движе-
нии по дуге МК окружности (7.29). Вторая траектория 2** (#)
представляет собой движение по дуге ОС' окружности (7.27)
с переходом на дугу СК окружности (7.29) (рис. 7.6).
Поскольку
движение
по
окружностям
происходит
с постоянной
угловой скоростью 1, время, затрачивасмос на движение по общим участкам двух траекторий, одинаково. Время различается
лишь
на прохождении
от
точки
С
до
точки
М,
так
как
дви-
жение происходит по дугам разных окружностей. Наилучший
вариант соответствует дуге, имеющей наименьшее угловое расстояние, и на рис. 7.б видно, что это дуга окружности (7.29),
так как угол СО>М меньше угла СО'М. Таким образом, трасктория 1**(Р) болос предпочтительна. Тот же вывод можно
сделать, используя условие 2° принципа максимума.
222
7. ПРИНЦИИ МАКСИМУМА
=
5 |
Рис.
7.6
Проверим выполнение условия 2° теоремы 7.2 для траекто-
рий 2*(Ё] и =** (1). Это условие на самом деле можно проверять
в любой момент времени, и в данном случае в качестве такого
момента удобнее всего взять начальный. Имеем
М( (и), =” (и) = мадеза)+и— (нал(ны) + Ч (ы)| = ФЕ) + |456).
Учитывая,
получаем
что, согласно
(7.21), 4* = —4%, и используя
(7.22),
М(Ф*
(и), = (в) = — Су соз(и — С5) + Сизйка - 65).
Точка
переключения
С’ трасктории
5*(Р)
соответствует
моменту времени $ = В +л/2, так как угловая длина дуги ОС
7.3. Задача быстродействия
окружности
же
время,
(7.27)
равна л/2
согласно
(7.23),
происходит
(угол ОО1С
переключение
при $ — (5 = (26+ Пл,
С. =И-пт/2.
Тогда МЕС,
223
равен
с
т.е. можно
> 0, т.е. условие
90°).
ч=1
на
В то
и = -1
считать,
что
2° теоремы
7.2
вВыЫпПоОлнНснНО.
Для траектории =^ (+) точка переключения М соответствует
моменту времени $ = в + л. В этом случае Со =Ни
0. Условие 2° теоремы 7.2 нарушено.
М
= С
<
Найдем время движения по траектории 2**(1). Для этого
нужно подсчитать угловые длины двух дуг окружностей. Дуга
ОС, как уже отмечалось,
имеет угловую длину л/2.
Дуга СК
окружности (7.29) также имеет угловую длину п/2: эта длина
измерястся
нструдно
углом
увидеть,
между
вскторами
ортогональны.
05С
Значит,
и ОК,
общес
а они,
как
время равно:
Т=в-н=
Движению
"(в
= рта
Задача
по траектории 2**({} соответствует управление
($ и
(7.16)
5) = $16054 —#)}
(7.19)
(рис. 7.7).
имеет
единственный допустимый про-
и
цесс (2 (№), и*(1)), удовлетворяющий принципу максимума.
Однако нельзя утверждать, что
этот процесс на самом деле
оптимален. Такое утверждение
обоснованно, если известно, тто
поставленная задача имеет решение.
#
Рис. ТТ
Приведенный пример показывает, какие трудности возникают в случае применения метода, базирующегося на принципе
максимума. Главная трудность состоит в том, что при использовании принципа максимума возникает краевая задача для
системы обыкновенных дифференциальных уравнений (7.15),
224
7. ПРИНЦИН МАКСИМУМА
причем красвысе условия задаются
менных.
только для фазовых
перс-
Отсутствие краевых условий для функции $ (+) суще-
ственно осложняет задачу.
Ясно, что оптимальное управление
и оптимальная траектория, выходящая из точки 2", зависят от
начального вектора $ (#1), но, к сожалению, условия максимума
для функции Я явно не указывают, как выбирать этот вектор.
Численный поиск начального условия для 9 (№) можно организовывать, опираясь на условие 2° теоремы 7.2.
Однако одного
этого условия недостаточно, чтобы организовать сходящийся
итерационный процесс последовательного уточнения вектора,
(11).
Успех аналитического решения задачи, рассмотренной в
примере 7.1, во многом объясняется тем, что система (7.16) ли-
нейна. Именно в линейных задачах проявляются преимушества
принципа максимума.
7.4. Линейная
оптимального
задача
быстродействия
Вернемся к линейной задаче оптимального быстродействия
(см. 6.4), к которой неприменимы методы классического вари-
ационного исчисления. Проанализируем эту задачу, используя
принцип максимума. Но прежде всего уточним ее постановку.
Пусть закон движения рассматриваемой системы имсст вид
42
—
= Аж+ Ви,
&
где х = (71, ..., т.) Е Е;
и = (в,
..., и," ЕВ";
(7.30)
А = (а)
—
числовая квадратная матрица, порядка 7; В = (5) — числовая
матрица, типа п хг. В качестве области управления Ц рассмотрим множество, описываемое системой нестрогих неравенств
т
У‘авш < В,
3—0
1=18,
(7.31)
7.4. Линейная задача оптимального быстродействия
225
и представляющее собой замкнутый ограниченный многогранник в В”. В качестве целевого функционала возьмем время пе-
рехода объекта из положения ж! в положение 57, те.
1=№-Н.
Кроме того, предполагаем (не оговаривая это каждый раз), что
многогранник ( удовлетворяет условию общности положения по отношению к системе (7.30), т.е. для любого вектора,
1 ЕЕ”, параллельного какому-либо ребру многогранника (, система
вскторов
Ву,
АВу,
..
А"1Во
(7.32)
линейно независима.
Напомним, что система векторов 41, 12, ..., 4. в Е линейно независима, тогда и только тогда, когда матрипа, столбцами
которой являются столбцы координат этих векторов, не вырождена, т.е.
Че (1, ..., и.) = 0.
Пример
7.2. Рассмотрим систему
=,
42 =13 +4,
=,
для которой
ото
А=[001]|,
1тоо0
10
В=|0и,
то
многогранник 0 описывается нсравенствами |и1| < 1, |и2| <1
и на плоскости 1 Оц2 представляет собой квадрат. Проверим
для этого многогранника (многоугольника) условие общности
положения по отношению к заданной системе.
Поскольку четыре ребра квадрата И разделяются на две
пары паралельных ребер, для проверки общности нужно рассмотреть только два вектора 91 = (1, 0)" и №2 = (0, 1)”. Для
226
7. ПРИНЦИН МАКСИМУМА
первого
из
них
имесм
1
0
Ви=|0|,
1
АВы=|1],
1
АВи=
|1
1
Так как
0
1
1|=-270,
0
то система вскторов Ву, АВъ1, А?Вь! линейно
Аналогично для второго вектора 92 получаем
0
Ве=|1]|,
0
Так
1
АВюь=|0|,
0
как
ото
100
001
независима.
0
|0
1
А?Вь=
=-1-20,
то и система векторов Ву, АВу, А?Ву> линейно независима.
Таким образом, заданный многогранник удовлетворяет
условию общности положения относительно заданной системы
дифференциальных
уравнений.
3
Для линейной задачи оптимального быстродействия
(7.31) запишем функиию Понтряаина Н(Ф,т,и):
п
Н = РТА
+ Ф` Ви
т
п
= у. У ‘члант;
= У` У
ЕЕ 71
Сопряженная
система
а.
т
в
данном
я
= оо,
(7.30)
фебыиш.
ВЕТ
случае
=
имеет
п,
вид
(7.33)
7.4. Линейная задача оптимального быстродействия
227
или в векторной форме
—=-А
ФЗ.
(7.34)
Согласно (7.33), функция Н ‚ как функция переменного м,
достигает максимума одновременно © функцией Е (и) = Ф” Ви.
Обозначим через Р(Ф) максимум функции Р(%) на множестве
0.
Из теоремы 7.2 следует, что если и*(р) — опимьмальное
травление, то найдется такое ненулевое решение $*(#) систе-
мы (7.34), что
("Ви (® = РФ" (9).
(7.35)
Так как систсма (7.34) с постоянными коэффициентами нс содержит неизвестных функций Ж(®, и(®, то все ее решения
можно найти, после чего легко определить соответствующие
управления и*({) как решения уравнения (7.35). Решение последнего сводится к поиску наибольшего значения линейной
функции Р'(и) на замкнутом ограниченном множестве И. Правда, возникает вопрос, имеет ли задача, поиска, и, при котором
Е(и) максимально на И, единственное решение. Ответ на это
дает следующее утверждение.
Теорема 7.3. Для любого нетривиального решения Ф(+)
системы (7.34) соотношение (7.35) однозначно определяет управление и($), причем это управление кусочно постоянно, а значсниями
управления
в
точках
непрерывности
являются
вершины
многогранника (7.
< Пусть $ (+) — произвольное нетривиальное решение системы
(7.34). Так как функция Ф(Ьи) = $(1)"Ви линейна по и, то
она, имеет максимум на границе многогранника 0
[ХТУ].
При
этом максимум может достигаться либо в вершине многогранника, либо во всех точках некоторой грани. Покажем, что в
силу общности положения многогранника последняя ситуация
реализуется лишь для конечного числа, значений времени %.
228
7. ПРИНЦИП
МАКСИМУМА
Предположим, что для некоторого бесконечного множества
МС[, В] приф Е М функция Ф(Ьи) достигает максимума на
целой грани Г; многогранника 0.
Тогда при м Е Г; она постоян-
на. Поскольку множество М бесконечно, а количество граней
( конечно, в М можно выделить бесконечное подмножество
Мг значений, которым соответствует одна грань Г многогранника И.
Пусть 0 и ч1 — концы ребра грани Г;.
‘Тогда всктор
1 = и: — чо определяет направление этого ребра. При этом для
ф= МГ
("Ве = (®”В(и! — о) =
=Ф("Ви, -Ф("Вш =Ф( и) -Ф(Ьш)=0.
Итак, функция ЧФ" Во приё Е Мг обращается в нуль. Матрица
В
является
постоянным,
числовой,
так
как
он
и
мы
один
можем
и тот
считать
же
для
вектор
всех
9
также
фе М:.
А
теперь отметим следующее. Поскольку функции 1); (#) являются решениями линейной системы дифференциальных уравнений с постоянными коэффициентами, они представляют собой
аналитические функции [Х]: в этом контексте # можно рассматривать как комплексный аргумент и аналитичность будет
иметь место во всей комплексной плоскости. Значит, и функция Ф" Во
является аналитической.
Но так как она, обращается
в нуль на бесконочном подмножестве М отрезка [#1 #2], то, согласно теореме единственности [Х], ФТВу = 0 при любом #.
Последовательно дифференцируя тождество Ф”Ву=0 но
в силу системы (7.34), получаем
(АФ(В)”Ве = 0,
(А)?
(1) Ве = 0,
(АТР)"Вы = 0,
7.4. Линейная задача оптимального быстродействия
или, учитывая известное матричное тождество
229
т
(АВ)
=В
Ф(И Ве =0,
Ф(`АВу=0,
Ф (В `А?Вь = 0,
таг
А’,
(7.36)
(ИТ А"! Въ =0.
Так как, по предположению, выполняется условие общности
положения многогранника (/, система вскторов Ве, АВ, ...,
А”_ТВь линейно независима, а потому образует базис в ®^.
Из соотношений (7.36) вытекает, что при любом $ вектор $ (®
ортогонален каждому вектору базиса, а потому равен нулю.
Это противоречит предположению о том, что решение #(
системы (7.34) нетривиально.
Итак, противоречие показывает, что для всех $, кроме разве
лишь конечного числа, функция Ф(Ьи) достигает максимума
только в одной точке — вершине многогранника.
Значит,
всюду, кроме конечного числа, точек, определено однозначно
управление чи ({).
Выколов конечное число точек неоднозначной разрешимости уравнения
(7.34), мы
тем самым
разобьем
на конечное число частичных интервалов.
таких интервалов
многогранника
А = (п, 72}.
Пусть
и,
отрезок
Выберем
..., и, —
[Н, #2]
один из
вершины
(7. Тогда А разделится на, з непересекающихся
множеств Му, А,
..., М., где М; — множество значений 1 Е А,
в которых максимум Ф(фи) достигастся в вершине %;. Оказывастся,
что
всс
Но интервал
множества
А можно
М;
являются
открытыми
(см.
нижс).
представить как объединение открытых
непересекающихся множеств только в том случае, когда лишь
одно из этих множеств непусто. Отсюда следует, что на интервале А функция и(1) постоянна, а потому непрерывна.
Покажем,
что множество
М;
открытое,
т.е. если то Е М;,
то и целая окрестность то также принадлежит М;.
Другими
230
7. ПРИНПИИ МАКСИМУМА
словами, если в точке то функция Ф(Ьи) достигает максимума в вершине \;, то и при вссх Ё достаточно близких к то,
функция Ф(|.и) достигает максимума в вершине 1;. Итак, при
1721 имеем Ф(то, и.) < Ф(п, и.) = Р(Ф(п)).
=$(И”Ви
непрерывна
по #.
Поэтому
Функция Фи}
конечный
набор
=
нера-
венств Ф(Еи;) < Ф(К и), 777
выполняющихся в точке =,
останется в силе и в некоторой окрестности точки до. Но это
как раз и значит, что точка максимума функции остается неизменной в некоторой окрестности то.
Согласно доказанной теореме, каждое оптимальное управление является кусочно постоянной функцией со значениями
в вершинах многогранника ©. Точки разрыва соответствуют
смене значения управления, и мы будем называть их точками
переключения. Если т — точка переключения, то слева, от нее
управление имеет одно значение, скажем и, а справа другое —
и;. В этом случае говорят, что в т происходит переключение
оптимального управления и” (#} из вершины ; в вершину и..
'Теорему 7.3 можно было бы охарактеризовать как теорему
о конечности числа, переключений. В каждой конкретной ситуации число переключений зависит от закона движения (7.30),
вида
области
управления
(многогранника)
(И и краевых
усло-
вий *', 1’. Оказывается, что есть класс линейных задач, в
которых при любых краевых условиях можно указать оценку
сверху для числа переключений.
Характерным
признаком этих
задач является отсутствие комплексных корней у характеристического уравнения матрицы А. Об этом говорит следующая
теорема, в своем первоначальном виде доказанная А.А. Фельдбаумом.
В своеи формулировке
чаем многогранника,
множеством в В вида
И = {и = (ш,
мы ограничимся
т-мерным
..., и,
в
щ
частным
слу-
параллелепитедом,
лишь
т.е.
< В, Ё=Т т}.
(7.37)
При такой структуре области управления каждос отдельное
управление и; представляет собой самостоятельный параметр,
7.4. Линейная задача оптимального быстродействия
область
изменения
управлений.
общности
которого
По-прежнему
не
зависит
предполагаем
от
231
значений
других
выполненным
условие
положения.
Теорема
7.4.
Если
(И —
параллелепипед
(7.37),
а все
корни характеристического уравнения матрицы А в законе
движения (7.30) действительны, то у любого решения и(#) =
= (1 (®), ..., и,(®)) уравнения (7.35) каждая из координатных
функций и, (#) кусочно постоянна и имеет не более т — 1 пере-
ключений (7% — порядок системы (7.30)}.
4 Пусть и (7) — решение уравнения (7.35), т.е. в каждый момент
+ вектор \(#) доставляет максимум функции Ф( и) = $ (В Ви.
Согласно теореме 7.3, для любой нетривиальной функции %(1)
такое решение существует и единственно.
Функцию Ф(Ь4)
можно записать следующим образом:
у
т
К=1
1= 1
Фи) = ("Ви = У
(Увы),
где Ф (1) = (41 (0), ..- Фь() и = (и, у);
= (738)
В= ().
Так как область изменения каждой из переменных 1; не
зависит от остальных, функция Ф достигает максимума при
фиксированном
$ в том
и только
в том
случае,
когда
макси-
1
мума достигает каждое слагаемое (У ыве(Е) ик в (7.38). Но
это слагаемое достигает максимума при и, = ак в случае отрицательного
коэффициента
при нем
и при ик = бь в случае
положительного коэффициента. Таким образом, компононты
всктора и, доставляющего максимум функции Ф, определяются соотношениями
ак,
и
=
УСЬьфКИ < 0;
т
В,
Усвыфки>0.
2=1
232
7. ПРИНЦИН МАКСИМУМА
7
<ункция > 65;,/:(Р как функция номплеюсного переменного
8=1
ф является аналитической функцией. Выбрав единичный вектор
‚
т
1 = (0,...,1,..., 0) (единица стоит на #-м месте), направленный вдоль к-го ребра многогранника (7.37), получим
(Ве
= ви
У
а.
=1
п
Предположим,
что сумма
> \ к: (Р) тождественно равна нулю.
1—1
Тогда с помошью рассуждений, аналогичных тем, что приведены в доказательстве теоремы 7.3, заключаем, что # (Е =0, аэто
противоречит предположению о том, что вектор 4*(#} ненулеть
вой.
Значит,
`В: (Р) непостоянна и, будучи аналитической,
1—1
может обращаться в нуль лишь в конечном числе точек. Нам
нужно показать, что число нулей этой функции не превосходит
п-—1, так как каждый такой нуль соответствует неоднозначности и*(Ё) и является точкой переключения.
Поскольку коэффициенты 8), могут иметь произвольные
значения, то ясно, что фактичсски надо доказывать: любая
линейная комбинация функций 1 (1), 122(1), ..., 4. (® имеет не
более чем и — 1 действительный нуль.
Согласно структуре
общего решения линейной системы обыкновенных дифференциальных уравнений с постоянными коэффициснтами, каждая
из функций 44; (#), в совокупности составляющих решение систс-
мы (7.34), имеет вид
(ели + Бей +... + (фе^",
(7.39)
где Ау, ..., Аж — совокупность всех различных действительных корней характеристического уравнения матрицы —А”,
НО,
...; п)
— многочлены, причем степень многочлена (1)
меньше кратности 7; корня А; [УП]. Любая линейная комбинация функций 1); (Р) также имеет вид (7.39). Согласно следующей
7.4. Линейная задача оптимального быстродействия
233
ниже лемме, общее число действительных нулей функции вида
(7.39) не превосходит
(1-1) + (72-1)+...+ (и-Ю+т-т=
= ("1 2+...
ги)
-1=п-1.
>
Лемма 7.1.
Пусть А, А2, ..., Ат — действительные
попарно различные числа, /1(7), ..., /в() — многочлены с
действительными коэффициентами, имеющие степени Ал,
...,
К,» соответственно. Тогда функция (7.39) имеет не более чем
М... - Ат + т — 1 действительных корнси“*.
В приведенных выше теоремах речь шла о структуре оптимального
управления
в
линейных
задачах
оптимального
бы-
стродействия. Для этих задач принцип максимума, позволяет
не только определить вид оптимальных управлений, но и получить условия единственности оптимального управления.
Управление и({} называют экстремальным управленуем, если оно удовлетворяет принципу максимума. Для линейной задачи оптимального быстродействия © областью управления — многогранником управление (т) является экстремальным, если существуст такое нетривиальнос решение $ (+)
системы (7.34), что для него будет выполняться соотношение
(7.35). Это соотношение равносильно условию 1° теоремы 7.2,
а условис 2° этой теоремы, как показано ниже, выполнястся автоматически. Ясно, что всякое оптимальное управление
являстся
экстремальным.
Поэтому,
чтобы
найти
оптимальнос
управление, переводящее фазовую точку из положения 2! в ноложение 22, нужно найти все экстремальные управления с теми
же краевыми условиями, а затем среди них выбрать то, которое
осуществляет перевод за наименьшее время. Возникает вопрос:
могут ли существовать несколько экстремальных управлений,
** Доказательство леммы см. в книге:
Гамнрелидзе Р.В., Мищенко Е.Ф.
Понтрягин
Л.С., Болтянский В.Г.,
234
7. ПРИНЦИН
МАКСИМУМА
переводящих фазовую точку из положения т Т в положение 227
Вообще
ше говоря,
говоря, да.
да. Но если‘ли начало ккоо
инат
а в
остранстве
пространств
управлений являстся внутренней точкой многогранника 0, то
экстремальное
управление
единственно.
Теорема 7.5.
Пусть в пространстве управлений начало
координат 0 есть внутренняя точка многогранника (И. Если
и() и &(К — два экстремальных управления, переводящие
фазовую точку из положения 2' в положение 2? = 0 за время
Нин
соответственно, то № = фи и
ЕВЕ,
Ы].
< Получим формулу для частного решения системы (7.30) при
произвольном управлении и(#) и начальном условии ®(#) ==1.
Для этого обозначим через ф\(®,
ф?(%), ..., ф"(@®) фундамен-
тальную систему решений однородной системы
которая
определяется
начальными
условиями
[В 1, ЕЛ =
=
.
.
1, ау
.
—_
|
т
где ф' = ($1, 95,..: 98) ‚ а через 4'(8, 9,
..., 4"(0
фундаментальную систему решений однородной системы (7.34)
с аналогичными начальными условиями:
р (#1) =
Для всех $ имеет место
соотношение
1)
2=л
(920, Ф'(9)) = р
(7.40)
7.4. Линейная задача оптимального быстродействия
235
Действительно, это условие, в силу выбора начальных условий,
выполнено при #=Н. Далее,
2970.9) = (1970.9) + (20.190) =
= (-4"47 8), 20) + (270, Аф (0) = 0.
Таким образом, функция (47 (#), ф'(#)) постоянна и ее значение
при любом
$ совпадает
со значением
при
=Н.
В соответствии с методом Лагранжа вариации постоянных
[УШ
общее решение системы (7.30) можно искать в виде
2 =У`Скеь(.
=
Подставляя это выражение в систему
(7.30), получаем
фФк(® = Ви($.
Умножаем последнее уравнение скалярно на 47 (1) и учитываем
(7.40):
408) = (47 (1), Ви(ь).
и
Решение системы (7.30} с произвольным управлением (+) и начальным условием 2! = (21, 25,..., 22) теперь можно записать
в следующем виде:
(=
хез
Е
КВт
(= + Г| ($° (с),
)4)
Ву@)) ат
].
(7.41)
Обозначим через ж(#) и (+) траектории, соответствующие
управлениям и(Р) и @(#) и выходящие из точки х1 в момент
236
7. ПРИНЦИП МАКСИМУМА
времени #.
По
согласно (7.41),
условиям
УФ")
Так
как
(% =
векторы
теоремы
(2)
(2), ват)
ф"(#),
1=Тп,
= &(№) =0,
или,
4) =0.
линейно
независимы,
из
последних двух соотношений вытекает, что
$2
ре
аа ] (2'(+), Вит) = ] (2х), ва(т)) т.
и
(742)
В
Пусть 2 > 5 и (Р — решение сопряженной системы (7.34),
для которого на отрезке [Н, +2] выполняется соотношение
(Ф(1), Ви) = Р(Ф()},
определяющес
функцию
и().
Разложим
(7.43)
функцию
Ф(Р
по
базису (8), ..., 9"(Ъ:
Ф( = Ул".
К=1
Умножая
(7.42) на А; и суммируя по К, получаем
[22
7.
] (Ф (+), Ви) а" = | (Ф (+),
Ва (т).
Я
@44)
Г
Заметим, что для любого решения Ф(Р) сопряженной системы (7.34) справедливо неравенство
Р($®(0)>0.
(7.45)
7.4.
Линейная
задача оптимального
быстродействия
237
Действительно,
(Ф, Ви) = (в°з, и).
Поэтому
Р($(#)) = шах ($(1), Ви) = шах (в°+ (9, и) .
ЕП
Поскольку
вЕЙ
начало координат является
многогранника
0, то функция
внутренней точкой
Р(,и) = (В"Ф(, и) при фик-
сированном $ может принимать как положительныс, так и отрицатсльнысе значения, либо тождественно равна нулю. Если
она не тождественный нуль, то Р($(1)) > 0, а в противном слу-
чае Р($Ф(1)) =0.
Учитывая
(7.43),
(7.45)
и предположение
#2 > т,
из
получаем
Итак,
(Р('), В\ 5) = Р(2 (9) > (Ф(0, В(9)),
зе в, Ы].
Значит, с учстом (7.46) имеем
(Ф (0), Ви(0) = (2 (9, Ва),
зе в, Ы..
(7.44)
238
7. ПРИНЦИИ МАКСИМУМА
Но тогда в силу
удовлетворяющие
теоремы 7.3 оба
(7.35) с одной и
тождественно равны: и(®) = (8,
управления (+) и #(Ъ,
той же функцией $($),
ен, 5].
Из совпадения управлений и равенства (7.44) следует, что
или
[Рио
#=0.
(7.47)
2
Рассмотрим
равенство
Р(Ф (0) =0.
Выполненис
этого раз
венства, как отмечено вышс, означает, что при фиксированном
$ функция Р(Ьч) тождественно равна нулю. Если предположить, что равенство Р (+ (0) =0 выполняется на некотором
бесконечном множестве значений $ то, как и в доказательстве теорсмы 7.3, можно показать, что аналитическая функция
$ (К) тождественно равна нулю.
А это противоречит принципу
максимума. Поэтому указанное равенство может быть верным
лишь для конечного числа значений {. Но тогда равенство (7.47)
при условии (7.45) может выполняться только при & = №. >
До сих пор мы пользовались только условием 1° теоремы 7.2.
Покажем, что в рамках предположений теоремы 7.5 условие 2°
теорсмы 7.2 выполнястся автоматичсски:
М(Ф(ь),=(12)) = Н(Ф(В),
=) иЬ)) =
= (4 (65), Аз(+)) + ($ (6), Вщь)) = Р($Ф()) 20,
так как 2() =22°=0.
В заключение сформулируем теорему существования для
линейных систем оптимального быстродействия (условие общности положения многогранника, И считается выполненным).
7.5. Задача синтеза управления
Теорема
переводящее
7.6*.
239
Если существует хотя бы одно управление,
фазовую
точку системы
(7.30) из положения
х!
в положение 27, то существует и оптимальное по быстродействию управление, также переводяшее фазовую точку из 2!
ва.
#
Задача управления состоит в построении допустимого управления, реализующего пель.
В рамках сформулированной
тсорсмы целью являстся состояние 5”. Поэтому тсорему 7.6
можно
было
бы
сформулировать
так:
ссли
для
линсйной
си-
стемы решена задача управления, то для нее можно построить
управление,
оптимальное
по быстродействию.
Итак, теорема, 7.6 утверждает, что оптимальное решение
в линейной задаче быстродействия существует. Любое оптимальное решение является экстремальным, а по теореме 7.5 экстремальное управление единственно. Следовательно, в рамках
теоремы 7.5 существует единственное экстремальное управление, которое является оптимальным. В этом случае принцип
максимума является не только необходимым условием оптимальности, но и достаточным. С его помощью линейная задача,
быстродействия можст быть решена полностью.
7.5. Задача
синтеза
управления
Выше, применяя прииит максимума, мы отыскивали опйимальное управление в виде функции времени +. Такое управленис называют программным управлением.
Однако во
многих случаях удобнес управленис рассматривать как функцию текущего состояния системы, т.е. как функцию фазовых
координат.
Это позволяет при построении управления учитывать возмущенное движение. Отклонение состояния системы от расчетного фиксируется и учитывается в последующем
управлении.
* Доказательство теоремы см. в книге:
В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
Понтрягин
Л.С.,
Болтянский
240
7. ПРИНПИИ
МАКСИМУМА
Можно представить некоторый технический объект, который снабжен прибором, фиксирующим его текущее состояние
путем измерения фазовых координат, и исполнительным механизмом, который по текущим фазовым координатам ж реализует управление (т). В этой ситуации мы имеем систему с
обратной связью
4%
в = Ат-+ Ви(т).
Фазовая траектория такого управляемого объекта зависит
от выбора функции и (2), которую называют синтезирующей
функцией
(или обратной
связью).
Определение синтезиру-
ющсей функции, позволяющей реализовывать цель управления,
называют синтезом управления.
Синтез оптимального управления в линейных системах осушсствлялся задолго до появления принита максимума. Одним
из первых среди советских ученых результаты в этой области
получил
оптимального
А.А.
Фельдбаум,
который
процесса в п-мсрном
ввел
фазовом
общее
понятие
пространстве”.
Впоследствии А.А. Фельдбаум разработал метод фазового про-
странства, с помощью которого была решена задача синтеза
управления для линейных систем второго порядка с одним
управляющим
параметром
и с действительными
собственны-
ми значениями матрицы системы”.
Позже эта задача была
решена, для систем второго порядка с комплексными собственными
значениями.
Появление
принципа
максимума
упростило
процедуру решения задачи. Использование этого принципа позволило решить задачу для систем второго порядка с двумя
управляющими параметрами.
Отметим, что сама постановка задачи синтеза и методы ее
решения характерны для теории оптимального управления и
гораздо хуже согласуются с методами вариационного исчисления. В этом разделе мы обсудим некоторые задачи, относящиеся к задачам синтеза.
*См.: Фельдбаум А.А. (1953 г.)
**См.: Фельдбаум А.А. (1955 г.)
7.5. Задача синтеза управления
241
Быстрейшая остановка движущейся точки в заданном месте. Пусть материальная точка движется по инерции
вдоль прямой.
Задача состоит в том, чтобы наискорейшим
образом остановить движенис этой точки в заданном местс,
которое мы примем за начало координат на прямой, с помощью ограниченной по величине силы.
Закон движения рассматриваемой системы имеет вид
В качестве области управления возьмем И = 1: и < 1}.
Преобразуем уравнение движения второго порядка введением дополнительных координат в систему дифференциальных
уравнений первого порядка:
ТЕ
92,
(7.48)
2-ц,
где 21 =Х,
12 =%.
Мы имеем дело с задачей быстрейшего попадания в начало
координат 2? = (0, 0)" из заданного начального состояния в! =
= (31, 2)".
Функция
Понтрягина
Н
для этой задачи
имеет
вид
Я
Учитывая
ограничение
= 412
|ц| <1
шах Н(Ф,
+ при.
на управление, получаем
ум) = 49152 + 42510142.
5
Согласно теореме 7.3, экстремальное управление
вид
и (В = вп о.
Из сопряженной системы
А
=0,
о = 1
и*(Р) имеет
(7.49)
242
7. ПРИНЦИИ МАКСИМУМА
находим 1 (8) = Ст, 425(1) = С2-— Си, где С1, С> — постоянные
интегрирования. Значит, экстремальное управление
и" (Е) =яв042(® = явщ(С5 — СЮ
является кусочно постоянной функцией с двумя значениями | и
—1, имеющей не более одного переключения, так как линейная
функция С — Со на отрезке [Н, ®| меняет знак не более одного
раза (это полностью согласуется с теоремой 7.3).
Для интервала, времени, на, котором и = 1, имеем
т 1 =
42,
22 =1.
Записав систему в симметричной форме
[МП]
Чтт _ 422
12
1
получасм уравнение с разделяющимися
= 12412. Его интегрирование дает
=
2
5 + 5.
переменными
471 =
(7.50)
Аналогично поступаем в случае и = —1. Система в симметричной форме имеет вид
ат
в
ах
2
15
—1
а,
откуда
=
2
5
=
+5.
(7.51)
Семейство фазовых кривых для рассмотренных случаев показано на рис. 7.8, а (и =1) ирис. 7.8, 6 (и =-1). Так как для
первой системы (= 412, то движение по параболам в случае
7.5. Задача синтеза управления
«<
243
о.
Хх
а
Рис.
7.8
и =1 снизу вверх. Для второй системы & = —4т2 и движение
по параболам при и = —1 сверху вниз.
Нас интересуют те дуги парабол, которые приводят в начало координат. Учитывая направление движения, заключаем,
1
что такими дугами могут быть дуга ОА параболы 11 = 522 (см.
рис. 7.8, а) либо дуга ОВ параболы 21 = —5#
Управление
%”^({) имеет
не более
одного
(см. рис. 7.8, 6).
переключения
и
максимум два интервала постоянства.
На первом интервале
постоянства нужно выбрать такое из двух значений 1 или —1,
которое привело бы фазовую точку из начального положения
2' на одну из дуг ОЛ или ОВ.
На дугу ОА, соответствующую
управлению и = 1, можно попасть по траекториям с и = —1, т.е.
двигаясь сверху вниз. А на дугу ОВ можно попасть лишь при
движении снизу вверх (рис. 7.9). Таким образом, плоскость
разделяется на две области.
Если
ж'
расположена
выше
<:
кривой АОВ, то, двигаясь
сверху вниз по кривым се-
мейства
д
2-1
©
(7.51), мы выходим
на дугу ОА и по этой дуге по-
сле переключения попадаем в
начало координат.
Если же
ж! расположена, ниже кривой
АОВ, то начальное движение
\
о
т
и-1
А
Рис. 7.9
244
7. ПРИНЦИН МАКСИМУМА
снизу вверх по кривой семейства (7.50) выводит фазовую точку на дугу ОВ, по которой после переключения фазовая точка,
попадаст в начало координат.
Наконец, отметим, ситуацию,
когда начальное положение х' оказыватся на кривой АОВ, В
этом случае переход в начало координат не требует переключеНИЯ.
Как видим, для любого начального состояния 2" существует
ровно одна экстремальная траектория, ведущая в начало координат (что согласуется с теоремой 7.5).
Если оптимальная
траектория существует, то она совпадаст с экстремальной,
т.е. построенная нами траектория обеспечит наименьшее время
движения. Существование оптимальной трасктории вытскаст
из теоремы 7.6. Эта теорема показывает, что в рассматривасмой задаче при любых начальных условиях х' оптимальная
траектория существует, так как существует хотя бы одно управленис, реализующсес цель. Итак, найденные трасктории оптимальны по быстродействию и других оптимальных траекторий,
всдущих в начало координат, нст.
Как построить в решенной задаче синтезирующую функцию? Поскольку для оптимального движения в каждый момент
времени нужно выбирать между двумя значениями 1 и —1, то
отипимальное по быстродействию управление равно:
м (1,22) =
(21,22)
1,
—1,
(51,12) ниже АОВ
или на ОА;
(11,72) выше АОВ или на ОВ.
Тогда, система,
21 =12,
12
=
(71,12)
при любых начальных условиях в качестве решения дает оптимальную траекторию. Нам удалось решить задачу синтеза, для
рассматриваемой системы. Отметим, что кривую АОВ называют линией переключений.
7.5. Задача синтеза управления
Приведение
весия.
маятника
Применим
принцип
в верхнее
максимума
245
положение
к
задаче
о
равно-
приведении
математического маятника в верхнее положение равновесия
(см. 6.1). Эта задача, сводится к задаче наискоройшсго персхода в начало координат с законом движения
2 1 =
42,
22 =
начальными
условиями
вление
|и| < д.
и?
р
—
1,
Для
+ и,
х' = (0,
упрошения
20)
и ограниченисм
выкладок
будем
на упра-
считать,
что
=1.
Запишем функцию И:
Н(Ф, в, и) = та + 42(а. + и).
Сопряженная система имеет вид
=
-4»,
=-.
Несложно найти се общее решение [У]:
(О
=-Се
+ бъе®
12(В) = Се + бое®,
где Ст, С2 — постоянные интегрирования, не равные нулю
одновременно (% не должно быть тривиальным решением). Из
условия максимума для функции Н находим управление:
(Е) = явпуь (В.
Управление оказывается кусочно постоянной функцией, а
так как функция 1/2() имест нс более одного нуля, то управлсние имеет лишь одно переключение и два интервала, постоянства значения. Для интервала, на котором и = 1, имеем систему
1
22
=
12,
+1,
246
7. ПРИНЦИН МАКСИМУМА
из которой получаем уравнение с разделяющимися переменными (11 + 1) 4х1 = 12 442. После интегрирования получаем
(1-2
=91,
где 51 — произвольная постоянная. Это семейство гипербол с
единым центром в точке (—1, 0). Так как & = 4х. /хо, движение
по гиперболам будет слева направо в верхней полуплоскости
22 > 0 и справа налево в нижней
(рис. 7.10, а).
Для интервала времени, на котором и = —1, поступаем анал
логично и приходим к другому
в точке (1, 0):
(т
—
12
семейству гипербол с центром
— 22
=
52.
Движснис по этим гиперболам будет слева направо в верхней
полуплоскости и справа налево в нижней
Рис.
(рис. 7.10, 6).
7.10
Как и ранее, нас интересуют дуги тех гипербол, которые приводят в начало координат.
Это дуга ОА гиперболы
(11 + 1)? — 25 =Т и дуга ОВ гиперболы (21 — 1)? — 22 =1.
Так
как управление кусочно постоянно и имест не более одного
переключения, то оно имеет не более двух интервалов постоянства, а, соответствующая фазовая траектория имеет не более
7.5. Задача синтеза управления
27
двух дуг гипербол, причем вторая дуга (может быть, единственная) ссть часть дуги ОА, ссли порсключенис с —1 на 1,
или часть дуги ОВ, если переключение с 1 на —1. Первая дуга траектории должна привести фазовую точку из начального
положения равновссия на дугу ОА при управлении и = —1 или
на дугу ОВ при управлении и = 1. Состыкованная из двух дуг
траектория будет оптимальной.
Анализ изображений на, рис. 7.10 показывает, что на плоскости х1Ох2 выделяется область (©, которая представляет собой
полосу между прямыми 11 + 22 = Ти т: + 22 = 1, не содержащую указанных прямых (рис. 7.11).
Если точка т' находится в этой области, то по
некоторой гиперболе из этой
точки можно перейти на кривую АОВ, и в результате для
такого начального состояния
оптимальная траектория ‹ушествует. Если же точка 21
находится вне области (©), то
попасть на кривую АОВ не
удается, так что для такого
положения
оптимального
решения не существует. УчиРис. 7.11
тывая это, область @ можно
назвать областью управляемости данной системы.
Напомним, что, согласно теореме 7.6, оптимальная траектория
существует, ссли существует хотя бы одна допустимая трасктория, переводящая фазовую точку из заданного положения в
начало
координат.
Отсутствие
оптимальной
траектории
для
начального положения фазовой точки внс области @ на самом деле свидетельствует о том, что из точек вне © вообще
ни при каком допустимом управлении попасть в начало координат нельзя. Теорема, 7.б говорит о том, что задачу поиска,
оптимального
управления
имсст
сти управляемости объекта.
смысл
решать
только
в
обла-
248
7. ПРИНПИИ
МАКСИМУМА
Итак, из любого состояния %' Е О можно наискорейшим
образом попасть в начало координат. Оптимальная траектория
состоит из двух участков, на которых управление постоянно.
Как и в предыдущей задаче, здесь можно записать синтезирующую
функцию:
ти
1,
(51,12) © О ниже АОВ
или на ОД;
—1,
(11,52) Е О выше АОВ
или на ОВ.
—
и (ть)
7.6. Задача
В
задаче
с
с подвижными
подвижными
концами
или
концами
начальная
точка
2,
или консчная точка 57, или обе эти точки не известны. Заданы
лишь множества, М и М5, содержащис эти точки.
Чтобы прийти к формулировке необходимых условий, желательно использовать геометрические представления. В дальнейшем под гиперповерхностью мы понимаем множество
всех точек х = (71, ..., ть) в ®, которые подчиняются соотношению /(71,....7,)=0, где |
скалярная дифференцируемая
функция многих переменных.
В частном случас, когда / —
линсиная функция, гипсрповсрхность описывастся уравнснисм
жи
+ а2т2+...
На
-+6=0
(7.52)
и ее называют гиперплоскостью. При 5 = 0 гиперплоскость
(7.52) является (п—1)-мерным линейным подпространством в
В" [ТУ]. Любое (»-— Ё)-мерное подпространство Н С В" может
быть
задано
как
множество
решений
линейной
однородной
системы А уравнений с я неизвестными, матрица которой имеет
ранг К:
а171 + 41252 +... Наш ть = 0,
@211 + 42252 +...
Тазжхи = 0,
ал + 6422 +... + ати = 0,
Ве (а)
к.
7.6. Задача с подвижными концами
249
Такос линейное подпространство будсм называть (п-—^)-мерной
плоскостью. Множество решений системы нелинейных уравнений
Ре (ет, ..’ бп)
где
функции
Якоби
этой
Л,
...,
системы
к
—
0,
дифференцируемы
функций
равен
А,
и
ранг
матрицы
проедставляст
собой
(п—К)-мерное гладкое многообразие [У].
Используем эти геометрические понятия для того, чтобы
сформулировать задачу оптиьмального управления с подвижными концами. Эта задача, состоит в том, чтобы найти такое
допустимое управление и(®) для системы с законом движения
#=1(т,и),
ге,
иск’,
которос переводит фазовую точку из некоторого, заранее
неизвестного, положения ж' на г1-мерном многообразии М
("1 < п) в некоторое положение 2? на т2-мерном многообразии
Мо (то < п) и при этом придает функционалу
22
минимальное значение.
Ранее рассмотренную задачу оптимального управления с
фиксированными концами можно интерпретировать как частный случай этой задачи при 1 = 72 = 0, т.е. когда многообразия
М! и М2 вырождаются в точку. Возможен и промежуточный
вариант, когда лишь одно из этих многообразий вырождается
в точку, и тогда в задаче один конец фиксированный, а другой
подвижный.
Как и в классическом вариационном исчислении, управление, оптимальное в задаче с подвижными концами, является
250
7. ПРИНЦИН МАКСИМУМА
оптимальным и в задаче с фиксированными концами. Поэтому
принцип максимума
(см. теоремы 7.1 и 7.2), рассмотренный на-
ми для задачи с фиксированными концами, дает необходимые
условия
и в этой
задаче,
имеющей
более
общую
постановку.
Но отсутствие уравнений, указывающих начальное и конечное
состояния, приводит к тому, что система
вий перестает быть полной. Недостающие
нсобходимых услоуравнения, как и в
вариационном исчислении, получают из условий трансверсальности. Будем говорить, что вектор сопряженных переменных
$Ф(8) = (40(#, ..., 4. (®)), существование которого утверждается в приципе максимума, удовлетворяет условию трансверсальностьи
на левом
конце траектории
2(#), если вектор
Ф (Е) = (41 (6), ..., 9. (Н)) ортогонален касательной плоскости
к многообразию М1 в точке 2(&), т.е.
(7.53)
(2(11), =) =0,
где д — произвольный вектор, лежащий в касательной плоскости. Аналогично формулируется условие на правом конце.
Условие трансверсальности на левом конце равносильно ортогональности Ф(Н) каждому из т1 векторов базиса в касательной плоскости, т.с. даст 71 уравнений. В совокупности с
условием принадлежности точки ж(Н) многообразию М) (это
условие определяется п — т, уравнениями) мы имеем ровно п
уравнений, как и в задаче с фиксированным левым концом.
Аналогичная
ситуация
возникаст
и
на
правом
концс.
Теорема 7.7.
Если (2*(, и*(1)), ЕЕ [Н,в|, — оптие
мальный процесс в задаче с подвижными концами 2(Н) Е М!,
(12) Е Мо, то ненулевая всктор-функция 4/* ({), существующая
согласно теорсмсе 7.1, удовлетворяст на каждом из концов тра-
ектории условиям трансверсальности.
#
Замечание 7.3. В случае задачи оптимального быстродействия с подвижными концами в сформулированном утверждении ссылку на теорему 7.1 нужно заменить ссылкой на
теорему 7.2.
7.6. Задача с подвижными концами
251
Отметим частный случай задачи с подвижными концами,
когда, например, правый конец траектории свободен (это озна
чает, что М2 =Е"). Тогда условия трансверсальности сводятся
к соотношению $(+5) = (41 (№), ..., 4,(№)) =0. Полный вектор
сопряженных переменных $(#2) = (40(#), Ф(12)) определяется
с точностью до произвольной постоянной.
Поэтому в данном случае можно полагать 120 (+2) = —1 (согласно принципу
максимума, 40 < 0) и $ (5) = (—10, ..., 0).
Это облегчает
применение принципа максимума, так как обеспечивает недо-
стающсс начальнос условие для всктора сопряженных переменных. Как отмечено выше (см. 7.3), именно отсутствие краевых
условий для сопряженных
переменных — главная трудность в
использовании принципа, максимума.
подвижными
(м,
в
частности,
со
Как видим, в задачах с
свободными)
концами
можно
ожидать, что процедура решения будет более простой.
Пример 7.3. Вернемся к задаче о быстрейшей остановке
движущейся точки в заданном месте (см. 7.5) и изменим ее постановку. Потребуем, чтобы точка не останавливалась в начале
координат, а достигала его за наименьшее время. Значение скорости в консчный момент времени нас тсперь не интерссуст.
В фазовых координатах 1 = т, х2 = $ закон движения
системы имеет вид (7.48)
т
=
12,
12
= цы.
Начальное состояние %(Н) = <! считаем заданным, а про конечное состояние (15) известно лишь, что оно находится на
оси Ох,
так как т1() =0.
управление.
Итак, поставлена
Многообразие
мерное
М>
Пусть
задача
с правым
описывается
многообразие,
|| <1
в каждой
ограничение
подвижным
уравнением
т, = 0.
концом.
Это одно-
сго точке касательное
странство одномерно, а любой касательный
(0, т2} имеет вид 2 = (0, (2), 2 ЕЮ. Условие
на
про-
всктор в точке
трансверсально-
252
7. ПРИНЦИН МАКСИМУМА
сти на правом конце можно записать следующим образом:
0.41 (62) + 242(6) = 0,
откуда, 42(15) =0. Функция Йи сопряженная система имеют
тот же вид, что и выше (см. 7.5).
Поэтому функция 42(#)
линейна. Из условия 1/5 (12) =0 следуст, что она на интервале
(#1, 22) сохраняет знак. Значит, оптимальное управление и* (#) =
= $121442(Ё] не имеет переключений и постоянно в течение всего
движения, т.с. или %* (К =1, или "(В =-1.
Материальная
точка движется по параболе семейства (7.50) в первом случае
и по параболе семейства (7.51) во втором.
Пусть
точка
т
начального
состояния
находится
в
правой
полуплоскости т, > 0. Через эту точку проходят две траектории, удовлетворяющие первому условию принципа, максимума — по одной из каждого семейства траекторий.
По параболе
семейства (7.50) движение направлено снизу вверх. Если точка ж' расположена выше дуги ОА параболы ссмейства (7.50),
проходящей через начало коВ
=
ординат
д: <
раболе
(рис. 7.12), то по нпа-
семейства
ка не достигает
что
и-1
№
А
Рис.
оптимальным
(7.50)
точ-
оси Ох2,
так
может
быть
только движение по параболе
семейства (7.51). Если же точка ж! расположена на дуге ОА
или нижс, то достичь оси Ох2
7.12
можно по любой из двух парабол. Однако из этих двух траекторий только одна удовлетворяет второму условию принципа максимума. Покажем это. Для
задачи оптимального быстродействия второе условие принципа
Понтрягина выглядит следующим образом:
М ($* (5), =*(6)) 20.
Учитывая,
что в нашем случае
М (49° (65),
2" ()) = 95)
+ |5)
7.7. Неавтономные системы
253
и
(©) =0, получаем 41 (6)25(6) >20, или, согласно виду решения сопряженной системы (47 = С1 = с0п80), С125(Ь) > 0.
Из построений следует (см. рис. 7.12), что в случае, когда
начальная точка 2! расположена, в правой полуплоскости, выполняется неравенство 15(Ю) < 0. Поэтому С1 <0. Равенство
С' =0
невозможно, так как тогда 45 = С2 = с0186 и, в силу
условия 125 (№) =0, решение Ч является тривиальным.
Остается случай С1 <0. Из решения сопряженной системы имеем
45(0 = С>2- Си. Так как С1 <0и 45 (6) = 65 -— Сл =0, то
45 (Е) < 0 на отрезке [#1, #2]. Следовательно, единственное до-
пустимое управление, удовлетворяющее принципу максимума,
имеет вид и* ($) = 9101445 (В = -1.
Таким образом, ссли х' находится правсс оси Ох», то оптимальным будет управленис %* (+) = —1.
заключаем,
что
при
начальном
Аналогично рассуждая,
состоянии
левее
оси
Ох2
ошти-
мальным будет управление и*(+) =1. Конечно, рассмотренная
задача, элементарна и не имеет большого практического значения. Ответ в нсй просматривается в содержательной постановкс задачи:
время,
Жми
чтобы из пункта, А попасть в пункт В за кратчайшее
нужно
двигаться
с максимально
возможным
ускорением.
на педаль — и все!
Наиденное решение позволяет определить
синтезирующую
функцию:
(ал,
(
71
12)
ь
1)
== =
2)
[21|
—1,
7.7. Неавтономные
я1<0;
1
> 0.
системы
В общем случае неавтономной системы правая часть закона
движения и подынтегральная функция целевого функционала
зависят явно от времени +, т.е. закон движения имеет вид
&= тм),
(7.54)
254
7. ПРИНЦИИ МАКСИМУМА
т
где я = (41, ..., 2),
и=
т
(41,...
1),
о
а целевой функционал
записывается следующим образом:
Па,и] = ] Юра.)
(7.55)
и
Как
и выше,
считаем,
что функции
(жи)
и (жи)
=
= (7, ..., 1")” непрерывны по совокупности переменных и
непрерывно дифференцируемы по части переменных х. Также полагаем, что момент времени {1 прохождения через точку
начального
состояния
ж!
известен,
а
момент
времени
12
про-
хождения через конечную точку х? не задан и должен быть
найден. Область управления 0 не зависит от времени.
Как и в случае систем обыкновенных дифференциальных
уравнений, поставленная задача может быть сведена к автономной задаче введением дополнительного переменного хи.
К закону движения добавим уравнение #„-1 =1, а к начальным
условиям — соотношение 2„-1(8)=#. Эти два условия равно-
сильны тождеству хи-1(#) ={.
Теперь в расширенном составе
фазовых переменных система (7.54) принимает вид
и
= Я
22
=
би
(аа
Г,
=
Жи),
т, м),
Рина
[© 56)
‚$, м),
а функционал Г/[%,и| — вид
[2
ем = [о бь-льзьы) 4,
(1.57)
#1
где {+
= 1. Мы преобразовали неавтономную п-мерную зада-
чу в автономную, но с расширенным фазовым пространством.
7.7. Неавтономные системы
В новой
задаче
соединяющую
требуется
точку
найти
255
оптимальную
(Н, т1,..., т)
траекторию,
расширенного
фазового
пространства с некоторой прямой, проходящей через точку
(0, 27, ..., 22) параллельно оси Ох»з1 (конечное значение №
переменного т„-+1 нам не известно). Таким образом, преобразованная задача — это задача с фиксированным левым и подвижным правым концами.
Если в задаче оптимального управления (7.54), (7.55), (7.2),
(7.3) (в частности, в задаче (7.1)—(7.4)) известны и начальный момент времени #1, и консчный момент времени $2, то
такую задачу называют задачей с фиксированным временем.
Преобразование такой задачи введением дополнительного переменного приводит к задаче с фиксированными
концами в следующей формулировке.
Требуется найти управление 1,({}, которое переводит фазовую точку системы (7.56)
из положения
(+ 1, 21,
...) =)
в момент
времени
#! в положение
(+2, 21,..., 22) в момент времени №, причем функционал (7.57)
принимает наименьшее значение. Мы можем не считать фиксированным момент времени #2 попадания в точку (57, #2), так
как
в силу
тождества,
жет
произойти
2-1
только
=$
попадание
в момент
в точку
времени
12.
(=,
С учетом
42)
мо-
этого
мы можем к данной задаче применить теорему 7.1. Согласно
этой теореме, для получения необходимых условий экстремума
функционала мы должны составить фунжиио Понтрягина
я
Н" = Уфо“
(инь, и) + У:
=
Я + Фи,
(7.58)
@—=0
где
й
НФ. ви) = Уфо
ви)
—
@=0
прежнее
выражение
функции
Понтрягина,
не
учитывающее
дополнительную, (и-1)-ю переменную, в котором за, этой переменной оставлено старое обозначение +. Сопряженная система
256
7. ПРИНЦИП МАКСИМУМА
записывается следующим образом:
фо,
а-уп
и
(7.59)
ин и--Т -=-2И
—
УЗЫ
Соотношения
в условиях
1°и
2° теоремы
7.1 принимают
вид:
НБ",
=" (и (0) +
Фе) 50,
и
= М6 "0, =” (0) +4,
Ма)
Сократим в первом условии на, *
ео.
(760)
| (#}:
Н(.$*
(0,2 (0, и“) = М (6$,
= (0).
(7.61)
Если бы функции 46 (#), 1 (®,..., 4* (Е) в некоторый момент
времени & обращались в нуль, то мы имели бы
Н(®,
4” (#5), =“ (6), и" (®))
=
0,
откуда, согласно (7.60) и (7.61), 9, (ю) =0. Но тогда д; (®) = 0,
$ = 0, ®- 1, как решение линейной системы дифференциальных
уравнений с нулевыми начальными условиями.
А это проти-
воречит теореме 7.1. Таким образом, 4" ($) = (46%), ..., .(1)
есть ненулевое решенис системы (7.59). Это позволяет уменьшить размерность задачи и не рассматривать функцию Фи
и второе из соотношений (7.60).
утверждению.
Мы приходим к следующему
Теорема 7.8. Пусть (2*(#), и*(1)), ЕЕ [#, 2], — оптимальный процесс для задачи с фиксированным временем. Тогда, существует ненулевая вектор-функция Ф* (1) = (4% (®,
соответствующая этому процессу, такая, что:
..., (0),
7.7. Неавтономные системы
1° для любого
$ Е [#1 ,#2| функция
257
Н(.$*(1),2* (9, и)
пере-
менного % достигает при и = и*(#) максимума,
Н(6
©, 2” (9,и) = М6" (9,2);
2° 4 ( <, 1Е[Н,Ы].
Я
Как и вышс, 4 = со.
Поэтому условие 2° тсорсмы
достаточно проверить в какой-то одной точкс отрезка.
Эта теорема в такой же степени позволяет решить задачу
с фиксированным временем, в какой теорема 7.2 позволяет реигить задачу со свободным временем. Уменьшение количества,
условий на одно (отсутствует условие м(ь$*(6),=* (5) = 0)
компенсируется уменьшением количества, неизвестных на одно
(задан момент времени 4+5).
Обратимся к случаю, когда при фиксированном моменте
времени # правый конец свободен. Это задача о том, как из
данного
положения
2!
за данное
время
#2 — #
пройти
по тра-
ектории с произвольным конечным положением при минимуме
данного функционала. Условия трансверсальности тогда, имеют вид 141 (12) = 142() =... =4»() = 0. Следовательно, 4% = 0,
и мы можем принять 460 = —1. Тогда при # = 12 должно выполняться условие
$ (12) = (-1,0, ..., 0).
(7.62)
Для рассматриваемого случая необходимое условие оптимальности состоит в том, что функция Н достигаст максимума при
любом # на оптимальном управлении и(+) и выполняется (7.62).
Отметим, что в задаче с фиксированным временем и свободным правым концом часто пелевой функционал является не
интегральным, а смешанным:
[2
Пе. = [ Юбер.
й
(7.63)
258
7. ПРИНЦИП МАКСИМУМА
В этом случае смешанный функционал необходимо преобразовать в интегральную форму (см. 4.5):
2
Це,и] = (лее
++ Те]
+ чт)
а.
(7.64)
[71
Пример
7.4. Рассмотрим систему с законом движения
|. = 22,
Фо=
(7.65)
+2.
Пусть даны: ограничение на управление —1/2 < и < 1, начальное состояние 7т1(0) = —1, 22(0) =1 в момент времени Н = 0,
целевой функционал
р
ель = [ из),
(7.66)
о
где 2 =2л известно.
Поставленная
задача
менем и свободным
смешанный.
—
правым
это задача
конпом,
с фиксированным
функционал
вре-
в этой задаче
Преобразуем функционал в интегральный соглас-
но (7.64):
Цеха, и = Г(. + 20) + и
22
0
Третье
нить,
слагаемое
используя
в подынтегральной
закон
функции
движения:
4х2 (+)
&
(7.67)
@
= (+2.
можно
заме-
7.7. Неавтономные системы
259
С учетом краевых условий и заданного конечного времени
42 = 2 приходим к следующему виду целевого функционала:
2п
Пти
=
2п
(зы)
= [вида
о
о
Появившесся
бор
постояннос
оптимального
слагасмос
решения,
и его
1 никак
можно
нс влияст
отбросить,
(7.68)
на вызаменив
исходный функционал другим:
21
Пежо, и] = виа)
0
К данной задаче применима теорема 7.8. Запишем функцию
Понтрягина:
Н = 0 (Зи — ж1) + ул
+ (+2)
=
= (—40 — 42)21 + Фито + (Зо + 242).
Эта функция является линейной по управлению и и поэтому
достигает максимального значения либо при и = —1/2, либо при
% = 1 в зависимости от знака выражения 34/0 - 24/5, т.е.
З4о() +245 (8) <;
ие -[:
1,
9)
Зо (+24 (9 > 0.
Запишем систему для сопряженных переменных:
Фо =0,
ф1 =
+4»,
=.
Общее решение системы имеет вид
(4) = С,
41 (Е = —С1 с03# + Со зшф,
192 (1) = [@] зшё
+ (2 605$ — Сз.
(7.70)
260
7. ПРИНЦИН МАКСИМУМА
а учитывая краевые условия 40(2*) = —1, 41(2т) = 42(2*) =0
для сопряженных переменных на правом конце, находим С1 =0
(@.
=
—1,
Сз
=
—1,
т.е.
40 =-1,
Итак,
Ч =-ЬЯЮЬ
Зо + 242 = —1- 260$
142 =1- 608.
и мы
можем
записать
экс-
тремальное управление, анализируя знаки функции —1 — 26081
(рис. 7.13):
1
а
5)
(=
2
0<Е<< зл;
Ъ эт<Е< ут
(ЛО
14
10
ри|
Ч8!
Эйр
273
<
2.
р
Поскольку наидено лишь одно
управление, удовлетворяющее принципу максимума, оно и будет оптимальным при условии, что
оптимальное управление в данной задаче существует. Определим экстремальную траекторию, соответствующую найденному управлению. Для этого необходимо решить систему (7.65)
Рис.
при
7.13
двух возможных
значениях
и.
На промежутке
[0, 57]
при
и = —1/2 имеем систему
й =”
(7.72)
решая которую, получим
21(В) = Су со + Созшё—1,
12( = —СазшЕ + С>со8ф.
(7.13)
Из начальных условий 11(0) = —1, #2(0) = 1 определяем постоянныс
имеем
интегрирования
С1
(В) = и
и С2.
С учетом
этих
- 1,
22(6) = с08$.
постоянных
(7.74)
Г.Г. Неавтономные
Очевидно,
мент
что при движении
2
времени
системы
261
по наиденной
# = з7 фазовая
точка, будет
траектории
находиться
в мо-
в состо-
янии
(зи) -ь
37)
На промежутке
—
5
(=, чл
24]
то.
оптимальная
3
ляется системой
(у)
,
я
=
траектория
опреде-
42,
д2=
фа
2.
Общее решение этой системы имеет вид
ж1(В = С1с03ё + Созшё- 2,
12(Р = -Стяш + С2с08%.
(7.15)
Подставляя в общее решение найденные значения 11, 72 при =
2
= =л, получим систему относительно неизвестных постоянных
3
/3
1
=
С
-
УЗ
1
+2,
УЗ
-5=-5
Решая эту систему, находим С\1 = >, С2=1но, на промежутке
Н
той
же
следовательно.
33
>.
(5*, з"|
2)
= 59+
| зл,2т|
4.2
системе
вид
оптимальная
(7.72),
(7.73).
ТТУ2
’
(7.76)
(1 _ 33) 08.
что
траектория
и на первом
Согласно
(7.76),
имеем
(а
Следователь-
оптимальной будет траектория
= 5 с08# + (1 — 33) эт 2,
имеет
5%.
в
(8
а промежутке
творяет
24
1
1
(4) ЗЕ2
удовле-
участке, 2
при = =
262
Как
7. ПРИНЦИН МАКСИМУМА
и вышс,
постоянных
составляем
систему
относительно
нсизвсстных
Сл и (2:
7- УЗ
_
1
3
во
33-1
УЗ
-Ь
1
ой 50
Решая ее, находим С1 =0, С =1- 3/3.
Таким образом,
последний участок траектории описывается системой
11(8) = (1 ЗУЗ)
зщ — 1,
т2(8) = (1-33) сов.
(1777)
Из соотношений (7.74), (7.76), (7.77) следует, что оптимальная траектория
состоит
из дуг трех окружностей
Рис.
На
первом
участке
0 <<
2
зп
(рис. 7.14).
7.14
оптимальная
описывается уравнением
(21 +1)? +22 =1,
фазовая
кривая
7.8. Понятие особого управления
на втором
2
участке
„п <<
4
зп —
263
уравненисм
(в, — 2)? +12 = 0-3У3,
на третьем участке т <+<2т
(1+1)
Лвиженис
но
по дугам
направлению
+2 = (1-33).
фазовой
вектора
— уравнением
кривой
фазовой
осуществляется
скорости,
т.е.
по
согласчасовой
стрелке.
7.8. Понятие
особого
управления
Принцип максимума Понтрягина нс позволяет однозначно
выделить отиьмальное управление, ссли максимум функции
Понтрягина Н по управлению достигается более чем в одной
точке на целом промежутке времени. В большинстве случаев
подобная ситуация говорит о наличии особых управлений.
На практике нередко встречаются задачи оптимального
управления, в которых фуниция Понтрягина линейно зависит
от всех управлений или хотя бы от некоторых из них.
Тал
ковы, например, линейные задачи оптимального быстродействия.
В примерах линейных задач, рассмотренных выше
(см. 7.5), коэффициент при управлении зависел только от решения сопряженной системы и мог обращаться в нуль лишь в
изолированные
моменты
времени.
Благодаря
этому
оптималь-
нос управление однозначно определялось из условия максимума,
функции Понтрягина.
дач
оптимального
Эта ситуация типична для линсиных
за-
управления.
Однако в нелинейных задачах оптимального управления
(например, если функция Понтрягина является нелинейной по
одной или носкольким фазовым переменным) возможна ситуация, когда на оптимальной траектории коэффициент при
одной из компонент вектора управления и обращается в нуль
264
7. ПРИНЦИН МАКСИМУМА
на целом промежутке времени, и тогда
функции Н по управлениям не позволяет
лить оптимальное управление.
условие максимума
однозначно опреде-
Пример 7.5. Рассмотрим задачу оптимального управления
с законом движения
1—2,
(7.78)
т2-ц,
функционалом
целевым
2
Цени — [за
и
краевыми
условиями
и ограничением
времени
на
#1 считаем
Поставленная
лишь
дит.
тан)
=,
(НН)
целевым
=,
управление
=
т1(2)
|ц| <1.
(7.79)
=0
Начальный
момент
фиксированным.
задача,
отличается
функционалом.
от рассмотренной
Посмотрим,
к чему
это
в 7.5
приво-
Составляем функцию Понтрягина
Н = 40 (22)? + о
и
(12)
12
записываем
сопряженную
+ Чаи
систему
0 =0,
92 = —24072 — Ч.
В каждой
точке
$, в которой
42(# = 0, функция
Понтрягина
имеет по управлению единственную точку максимума, и в этом
случае и*(+) = в142(), т.е. ситуация здесь такая же, как и в
задаче
оптимального
быстродействия
(см.
7.5).
Значит,
на
7.8. Понятие особого управления
265
интервалах времени, на которых 1/5(#) 2 0, оптимальные фазовые кривые являются дугами парабол вида (7.50) или (7.51).
Однако возможна ситуация, когда 42(8) =0 на нокотором отрезке [#,# с [#22]. Покажем это.
Из первых двух уравнений системы (7.80) имеем фо(® =
= Су = с018, 91 (® = С1 = с0п8.
Подставлясм найденные функ-
ции в третье уравнение:
ро
—
—С
— 2Сото.
(7.81)
Предположим, что принципу максимума удовлетворяет траектория 2*(К), на которой х2(#) =0 для некоторого момента
времени
#’Е
[#1 12].
Такую
траекторию
можно
построить
из
дуг парабол семейств (7.50) и (7.51). Если этой траектории
соответствует вектор сопряженных переменных $ (#) с 41 (#) =
= С1 =О0и
142(Ё) =0, то в точке # выполнены соотношения
[УПИ:
ф2(Р)=0,
42) =0.
Это и может означать существование некоторого отрезка, [1 #"|,
на котором 422(8) =0.
#
Ситуация, описанная в примере, получила название особого режима. Опишем такую ситуацию в общем случае.
Рассмотрим автономную задачу оптиьмального управления
(7.1)—(7.4), в которой функция Понтрягина Н линейна по части
компонент управляющего вектора. Выделим из этих компонент
группу из 7; управлений и обозначим ее через 14, а остальные
т2 =г-— 1 управлений соберем в вектор %, он может включать
и часть управлений, по которым функция Н линейна. Удобство
такого разделения управлений будет видно ниже при формулировании определений. При таких обозначениях закон движения
системы можно записать в следующем виде:
& = (т,
и,5),
266
7. ПРИНЦИП МАКСИМУМА
а функцию Понтрягина — в виде
ды
ТО,
ВВОДЯ
=а;(Ф,,%),
з=ТИ,
(7.82)
обозначение
ан _ (сн
эн
ди
ди
\ды’“”
запишем функцию Н в виде
Н =
ЭН
— “+0.
ди,
Предположим, что область управления задачи сесть декартово произвсденис (Их У, где Ис Е"! — область допустимых
значений вектора и, а
УЕ Е"? — область допустимых значений
вектора, ®.
Пусть процесс (2(, (®, ®(®)} совместно с решением 4($) =
= (40(#), ..., 9» (®)) сопряженной системы
.
у;
ЭН.
=
`
да.
* —
.
0, 7%,
(7.83)
удовлетворяет принципу максимума и при этом во всех точках
некоторого промежутка [#, #'] С [1, 12| выполняется равенство
ЭН
‚=
ди (#9, =(,5(0)) = 0,
или, учитывая
(7.84)
(7.82),
а(Ф(1),=(1,0(1)) =0,
где а = (а1, ..., а»).
В этом
случае
вектор
(7.85)
управлений
и(®
называют особым управлением в промежутке [#, #'|, процесс
7.8. Понятие особого управления
(=(®, и,
3)
—
особым
режимом,
траекторией особого режима,
участком
ма,
траекторию
а промежуток
особого управления
Из формулы
267
времени
%(
—
[#,#] —
(режима).
(7.85) вытекает, тто на участке особого режи-
_
_
Н(Р (0, =2(9,м,о) = (8), 29.5),
т.е. функция Понтрягина не зависит от 4 и условие максимума,
по ‘и не дает никакой информации о конкретных значениях
управлений в этом векторе.
Поскольку на участке особого режима верно тождество
(7.84), то он как всктор-функция времени тождественно равна,
нулю, а потому равна нулю и ее производная по времени.
Значит, вектор-функции $(8, 2(И, ич(К могут принимать
только такис значения, которыс удовлетворяют соотношению
4 (2-6
4
а
ЭН
.,
в котором производная по времени есть полная производная в
силу систем (7.1) и (7.83). Если левая часть этого равенства
не зависит от и, то для определения особого управления можно
взять следующую производную и приравнять нулю:
в(27)_,
а
\ ди)’
и т.д. Эти соотношения совместно с условием (7.84) позволяют
выделить все особые режимы.
Пример 7.6. Продолжим обсуждение задачи из примера
7.5 и найдем в этой задаче особыс режимы. Так как
Н($,
ЭН
то —— =12,
2, и)
= оо
и производные
+ 4112
по времени
+ ли,
в
этой функции
систем (7.78) и (7.80) равны
а
[ЭН
Е (5.
ди
= 9
- 2402,
4
7
/9Н
о) — 240.
в силу
268
7. ПРИНЦИН МАКСИМУМА
Поэтому на участке особого режима должны выполняться
венства,
2(8) =0,
—41(0 -— 24%0(@)22( =0,
—2% (Фи
ра-
=0,
или, с учетом 45 (#) = Су, 41 (8) = С\, что следует из сопряженной
системы,
ро (Е) =0,
СЧ
200т2(1)
=0
и (Е) = 0.
(7.87)
Согласно условию 2° теоремы 7.1,
тах
Значит,
НФ),
на участке
и) = м($(1,2(0)
особого
режима
4р0(#)25(0) + ФИО
=0,
16
выполняется
Е, 22].
равенство
то (0 = 0,
или, с учетом 40(4) = Со, 41 (8) = С1,
Со2(В) + Сит2(® = 0.
(7.88)
Из условия $(4) 0
следует, что Су и С! одновременно не
обращаются в нуль. Тогда, согласно (7.87) и (7.88), на участке
особого режима,
СТ
Из системы
=
0,
(7.78) вытекает,
#2
=
0.
(7.89)
что #1(8 =0.
Поэтому
2. (8 =
Итак, на участке особого управления обе фазовые
коорди-
= соиз, фе [,#"|.
наты
остаются
постоянными.
Фазовая
точка
на
таком
участкс,
попадая на ось Оху, остается на этой оси неподвижной на весь
период
особого
режима.
Фазовой
траектории
особого
режима,
соответствует единственная точка, на указанной оси. Обратим
внимание, что такое „стояние“ в точке оси не влияет на значение целевого функционала, так как в течение всего времени
особого
режима
подынтегральная
ционала, равна нулю.
функция
15 целевого
функ-
7.8. Понятие особого управления
269
Теперь мы можем полностью описать все допустимые пропессы, удовлетворяющие принципу максимума.
Оптимальное
управление может принимать лишь значения 1 и —1 на обычных
(неособых) участках, а также значение 0 на участке особого режима.
Если, двигаясь по оптимальной траектории, мы
достигнем оси Ох (тогда 52 = 0}, то в достигнутой точке можем
устроить
участок
стоянку,
особого
причем
режима, может
любой
быть
длительности,
произвольным.
так
как
Эта
сто-
янка и ее длительность не отразятся на значении целевого
функционала. Для описанного процесса существует ненулевой
сопряженный вектор Ф(8, удовлетворяющий принципу максимума.
Выясним, сколько нулей может иметь функция 1/2(1), для
чего используем второе соотношение в условии 2° теоремы 7.1.
Согласно этому соотношению, 4 < 0 и, значит, Со < 0. Из
равенств
22 = и = ви
вытскаст,
что
(К,
42 =-С1 — 20042
й
ро + 2Созенлуо = 0.
Покажем, что при
менять знак при {Е
(7.90)
Со <0 решение такого уравнения может
[1, #5] не более одного раза. Предположим,
гто 42 (Р) обращается в нуль в точках #, #'. Умножим уравнение
(7.90) на 42(), учтем, что
.
а
.
2
1242 = 4 $, (4242) — (4>)`,
и проинтегрирусм уравненис (7.90) на отрезке [#, #']:
#!
—_ [учас
Г
О
[ном
(7.91)
|
При Су <О0
в левой части полученного равенства —
двух неположительных слагаемых. Поэтому равенство
сумма
верно,
20
7. ПРИНЦИН МАКСИМУМА
когда каждое из этих слагаемых равно нулю, и мы приходим к
выводу, что 42(#) = 0 на всем отрезке [#, #"].
Итак, функция 172 () обращается в нуль либо в единственной
изолированной точке, либо на одном отрезке {,#”]. Так как
(В = 921012(Е), то управление и*(Р) имеет не более одной
перемены знака. Такое управление относится к одному из двух
следующих типов:
и =
1,
Н <<:
0,
Г<Е<и;
—Ь
РИоЗЕЗЬ,
—1
и =х
0,
н<:<И;
Г<ЕХЕ;
1)
РЗЕХЬ.
ИЛИ
Значение # соответствует моменту времени, когда, х2(1) обращается в нуль, а значение #’ — любое на отрезке [#, +].
Теперь уже не составляет труда найти оптимальное управление и оптимальные траектории для конкретных начальных
условий (21, 5). Наличие участка особого управления не изменит вид фазовых кривых, так как на таком участке фазовая
точка не перемещается, а стоит на месте.
Фазовые кривые
будут те же, что и на рис. 7.9 (см. 7.5).
Но оптимальным
фазовым кривым, пересекающим ось Ох1, соответствует бесконечно много оптимальных процессов, каждый из которых
получается „вклеиванием“ участка особого управления в момент достижения указанной оси. Длина участка может быть
произвольной.
Такое
„вклеивание“
не
меняет
значение
пеле-
вого функционала. Существование особого режима приводит
к тому, что рассматриваемая задача при некоторых краевых
условиях имеет бесконечно много решений.
Вопросы и задачи
271
Понятие особого управления впервые ввел Л.И. Розоноэр*,
и это послужило началом целого направления в теории оптимального управления.
Вопросы
7.1.
ствия:
р
Решите
—
а) | р
следующие
и
задачи
задачи
оптимального
быстродей-
_2,
— и
Чл (1)
=
хан)
=
0,
21(6)
=
—1,
42()
=
0,
<
=
+2,
6) { по
ичи
И) =®ИЫ) =0, аб) = —2, и)
0,
[м <2
=
—
а (Н) =0, 22(Н) =4,
а
ет
аи
<
4
фи,
2,
1=
2
а
12()
[м2|
=
Виа,
—10,
2 (Ь) = 22(6) = 0;
ви) = 22(Н) = 2, а1(Ь) = 6, 22(6) = —2,
<
м,
“|
(НН)
<
2,
оо
=
[42]
2,
<
ж2(Н)
9.
=
2,
21 (22)
—_
=
2,
2
7.2. Решитс задачу оптимального быстродействия с правым
подвижным концом
ры
12= жи,
а1(н)=4, ан) =-3, [1 (ь) + [22(6)]
=,
|“ <1
См.
Розоноэр
Л.И.
(1959 г.)}, а также:
Габасов
Р., Кириллова
М. Ф.
272
7. ПРИНЦИИ МАКСИМУМА
7.3. Решите следующие
фиксированным временем:
а)
[ели
шт,
задачи оптимального управления с
#=и, (п) =2(-п) =0, и < Г;
—п
6)
4
[а
0
+2)@&—шш,
&=и, 2(4) =0, и|<1.
7.4. С помошью принципа максимума запишите полную систему необходимых условий в следующих задачах оптимального управления (21, 25, 27, 12, Т заданы):
Т
.
а)
,
о
+ [22(Г)|"
2
.
тт
> пит,
=
—45,
Ш
Е
| аи,
21(0) = 21,
[2 — 72)
(т) =,
0
22(0) = жз, | < 1;
т
6)
ив
+ [2:(0)]
— ши,
12 = ии,
0
т2(Т) = 22,
< 1.
7.5. Исследуйте на наличие особого режима
мального управления (21, 25, #2 заданы):
задачу
опти-
[2
ео
— ши,
[2 22 ти,
11 (0) = 21, 22(0) = 23,
=,
21
(+5)
=
42()
=
0,
7.6. В задаче
в
заданном
месте
Кй
<
1.
о быстрейшей
вычислите
минимальное
-
произвольнои
= (0, 0)".
точки
21
=
остановке
(21,
движущейся
время
точки
движения
из
чт
25)
в
начало
координат
22
=
Вопросы и задачи
7.7. Наидитс оптимальное управление
траекторию 2” (+) и время Т в задаче
т
273
и*(#), оптимальную
.
] (1
[м] ) 44 — пит,
{ В = 22,
21(0) = 12,
2=\ц,
О
22(0)
=
ж(Т)
=
2(Т)
=
0,
м
<
1.
7.8. Найдите оптимальное управление и*(#{} и оптимальную
траекторию 2*(#) в следующих задачах оптимального управления:
а)
[и
ть
се»
.
12
12(0) + 22(1) =0,
6)
22(т) — пи,
фЕ
(0, 2*|.
21 (0) +1. (1) =0,
—ч,
< 2;
| р - —
в
8
МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Одновременно с принципом максимума Понтрягина и независимо от него в теории оптимального управления коллективом
американских ученых во главе с Р. Беллманом был разработан
метод динамического программирования.
Этот метод
более универсален, чем метод, использующий принцип максимума. Он был разработан для нужд оптимального управления
процессами более общего характера, чем процессы, описывал
семые системами дифференциальных уравнений, и позволяет
решать большой круг задач оптимального управления дискретными системами, т.е. системами которые описываются разностными
идеи
уравнениями.
динамического
В
этой
главе
мы
обсудим
основные
программирования.
8.1. Принцип
оптимальности
В основе метода динамического программирования лежит
сформулированный Г. Беллманом принцип оттимальности. Этот принцип верен для тех систем, последующее движение которых полностью определяется их состоянием в текущий
момент времени. К таким системам относятся, например, управляемые системы, т.е. системы, которые описываются системой дифференциальных уравнений
& =
т
(т, м),
(8.1)
т
т
где ж = (21, .... 4); = (Л, ..., м); =,
....%) . О0стояние такой системы описывается точкой ж фазового пространства, а движение — это некоторая траектория т(#) в
8.1. Принцип
фазовом
пространстве
мальности
которые
также
онтимальности
(фазовая
траектория).
распространяется
описываются
275
на
Принцип
дискретные
конечно-разностными
опти-
системы,
уравнениями.
В
таких системах роль времени играет дискретный параметр.
Принцип оптимальности отражает важнеишие особенности
задач оптимального управления. Его суть можно объяснять
по-разному. Ввиду его важности приведем несколько формулировок.
Первая формулировка. Если управление оптимально, то,
каковы бы ни были первоначальнос состоянис системы и управленис системой в начальный момент времени, последующее
управление оптимально относительно состояния, которое система, примет в результате начального управления.
Указанное свойство — одно из основных для процессов
марковского типа, т.е. процессов, будущее поведение которых
полностью определяется состоянием и управлением в настоящее
время.
Вторая формулировка. Оптимальное управление в любой момент времени не зависит от предыстории системы и
определяется только состоянием системы в этот момент и пелью управления.
Под целью управления в данном случае понимается требование, которому должна удовлетворять система, движение которой определяется управлением. Это может быть приведение
системы в заданное состоянис или обеспечение определенных
условий движения в течение заданного периода времени.
Еще
один
вариант
дачи оптимального
принципа
управления
оптимальности
дадим
с фиксированным
для
временем
за:
и
свободным правым концом. Пусть закон движения описывается автономной системой дифференциальных уравнений (8.1),
причем заданы начальный Н и конечный #2 моменты времени,
а также начальное состояние 2(н) = х'. Целевой функционал
276
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
определим следующим образом:
/
127)
Це,и] = | Р(х, и).
Третья
мени
формулировка.
Ё Е [1, 12],
участок
(8.2)
Начиная с любого момента вре-
оптимальной
траектории
2*(#),
ЕЕ
Е [1 №] от точки 2*(Ё) до точки
=
2*() также является оптимальной траекторией (рис. 8.1).
Другими словами, каково бы
2
ни было положение
ал = "(Н)
на оптимальной
[@]
*
Рис.
точки *(Е)
фазовой
траск-
тории, ее участок от точки 2*(#)
(участок 2 на рис. 8.1) тоже явля-
8.1
ется оптимальной траекторией.
Что жс касастся участка 1 оптимальной трасктории до точки
2*(#), то можно утверждать, что этот участок ссть оптимальная траектория, когда точка х*(Р) = х'’ является фиксированной (как, например, в многоточечных задачах управления), т.е.
когда по условию задачи допустимая траектория обязательно должна проходить через точку х’. Если же задана только
начальная точка 2*(н) = х', то участок 1 оптимальной траск-
тории сам по себе может и не быть оптимальной траекторией,
т.е. может не доставлять максимум функционалу
Л [и]
=
/
ф
(в,
и)
в задаче со свободным правым концом.
Таким образом, важно имсть в виду, что принцип оптимальности относится к последующему за данным состоянием
движению системы, но может нарушаться для движения, предшествующего данному состоянию.
8.1. Принцин
оптимальности
2
Принцип оптимальности в третьей формулировке для некоторого класса задач уже обсуждался в качестве свойства,
оптимальных траекторий (см. 7.1).
Отметим еще одну особенность оптимального управления, вытскающую из принципа,
оптимальности: выбор оптимального управления определяется
лишь состоянием системы в текущий момент времени. Если в
какой-то период времени управление было неоптимальным, то
последствия этого в будушем исправить уже нельзя.
Пример 8.1. Гассмотрим простейший вариант дискретной задачи распределения ресурсов и покажем, как можно использовать принцип оптимальности. Производственно-экономический процесс состоит в следующем. Некоторая начальная
сумма денег 3 = 21 затрачивастся на приобретение оборудования
двух
типов
производство.
А
Пусть
и В,
с помощью
на оборудование
которого
организуется
типа, А выделена, сумма,
1,
ОЗ, < 71, тогда за определенное время его эксплуатации будет получен экономический эффект 9(и1}. Оставшаяся
сумма 51 — и! пойдет на приобретение оборудования типа В,
которое за тот же период времени даст экономический эффект
1 (11 —и1). К концу срока эксплуатации суммарный экономический эффект составит
Па (ети) = 91)
Е (фи).
По истечении срока эксплуатации оборудование реализуют, за
оборудованис типа А выручают сумму си, 0 < а < 1, аза обору-
дование типа В — сумму 6(41 -и1), 0<6< 1. Этим завершается
первый цикл производства. Вырученную от продажи оборудования сумму
22 = ми + 6(1 и)
используют как стартовую для организации второго цикла производства. Из нее на оборудование типа А выделяется сумма
и,
0 < и2 < 12,
тение
а оставшаяся
оборудования
типа В.
сумма
52 — и2
Следующий
идет
цикл
на приобре-
эксплуатации
218
— 8. МЕТОД ДИНАМИЧЕСКОГО
оборудования
ПРОГРАММИРОВАНИЯ
даст экономический эффект 9(и2) + № (12 — и2) и
остаточную сумму #3 = аи2 +6(22 — и2) за проданное оборудование. Описанный цикл производства многократно повторяется,
Считая
известными
функции 9(&), №(&) и постоянные
3, а,
5, найдем такую стратегию распределения средств при покупке обрудования
типов
экономический
эффект
А и В,
за
чтобы
изводственных
циклов.
Другими
обеспечить
фиксированное
наибольший
количество
словами,
значения 1, ..., из в допустимых пределах,
я
про-
надо так выбрать
чтобы получить
максимум величины
п
Ви (3. 1,42...
и)
= У `(9(иь) А (ть — и),
(8.3)
К
где
71=3,
Мы
Хита
= ит
Е Ы (ть
— ит),
Оззи,
< Тт,
пришли к дискретной задаче оптимального
т
=
1, т.
управления.
Параметры 1, 42, ..., \», которые нужно определить, решая
задачу, есть управление, неравенства 0 < и < тт, т =Т п,
описывают область допустимого управления, а суммарная величина
(8.3) есть целевой
функционал.
рования процесса, на, -м
Отметим,
что для плани-
цикле необходимо знать лишь
величи-
ну хр и число й — К оставшихся циклов. Процесс планирования в
предыдущие пиклы никак не влияет на планирование в текушем
цикле, т.с. „история“ процесса не имеет значения. Основной
интерес в этой задаче представляет нс значение максимального
экономического
эффекта,
а процедура
его
достижения,
или, другими словами, оптимальная стратегия распределения
средств.
Принцип оптимальности предполагаст использование хорошо известного приема, состоящего в планировании от конца,
к началу. Рассматривая последний п-й цикл, найдем значение
оптимального управления и» как функцию состояния процесса,
8.1. Принцип
онтимальности
279
на начало этого цикла. Это позволит распределять средства, на,
этом цикле в зависимости от их количества х„. Затем, используя оптимум последнего цикла, найдем оптимальную стратегию на двух последних циклах как функцию состояния процесса,
на начало предпоследнего цикла. Для этого достаточно найти
величину и„_1 как функцию т„_1. Процедуру повторяем для
трех
ка
последних
нс охватим
циклов,
всс
четырех
циклы.
На
и
так
последнем
далее
до
шагс,
тех
найдя
пор,
и1
по-
как
функцию 41 и зная фактическое значение х1 = 8, мы сможем
вычислить всю серию значений ит, 12, ..., ип, т.е. определить
оптимальную стратегию.
Итак, на я-м цикле в зависимости от т» максимальный
экономический эффект равен:
тв(ти) = тах,
а значение
является
(ти),
искомым
(9(и») + (а
на котором
— шт),
достигается
оптимальным
значением
этот
в
максимум,
зависимости
от
т». Считая, что на последнем цикле ии, = и* (ти) и достигаемый
экономический эффект равен т„(т»), ишем максимум:
ти1(и1)=
шах
Зи
—
-15
шах
[9
1)
ил
—
чит)
ть(2т)|
—
1
05-15 т-1
[бин
ан
НТ
—и_)-+
(аии—1 + (тит
— и„-1)} | .
Найденный максимум Г„_1(7и_—1) и соответствующее значение
= |; при котором он достигается, позволяют перейти к следующему этапу.
Продолжая продвигаться к началу процесса, мы на &-м
этапе ищем максимальный экономический эффект ит (тт), ® =
=п-—А1, за последние А производственных циклов в зависи-
280
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
мости от средств г», на начало т-го цикла по формуле
ть (тт)
—
шах
ОЗ т
[би
+ (тт
ЧЕ она (ат Е Бат, — “„))| ‚
— ит}
+
теЕП-ЕНЬ
К=Ти.
(8.4)
Соотношение (8.4) — это рекуррентное соотношение
Беллмана для рассматриваемой задачи. Оно сводит задачу
оптимизации
из них
на
с учетом
Е
последних
уже
циклах
найденной
к
оптимизации
оптимизации
на
первом
на, & — 1 послед-
них циклах. Величина 71(71) представляет собой суммарный
экономический эффект за все п производственных циклов в
зависимости от стартового значения 11.
Задача отыскания
максимума,
функции
й переменных
с очень
сложной
зависимо-
стью свелась к
последовательным задачам поиска максимума,
функции
переменного.
одного
Изложенный метод решения дискретных задач оптимального управления можно использовать в непрерывных задачах
оптимального управления, но для этого непрерывную задачу
нужно
заменить
близкой
ей дискретной
задачей
называют дискретизацией исходной задачи).
имеет закон движения
=
(ти),
ТЕВ
(эту замену
Пусть система
цЕВ,
(8.5)
и задано начальное состояние 5(0) =х 9 системы. Для управлсния %($) (как и выше, это кусочно непрерывная функция) введем
ограничение |и| < 1. Время движения ТГ’ = +2 — И считаем фик-
сированным.
# =0.
Так как система автономна, можно считать, что
В качестве
целевого
функционала,
возьмем
т
Пе, = ] Пий.
(8.6)
0
Лля замены поставленной нспрерывной задачи
ного управления близкой ей дискретной выберем
оптимальнекоторое
8.1. Принцин
оптимальности
281
натуральное число № и разобъем отрезок [0, Г] на № участков
одинаковой длины 6 = Т/№. Будем искать значения функций
лишь в дискретные моменты времени 1 = д, & =0,
№. Вместо
(д) и и(Кд) будем писать тк и и; соответственно. Дифференциальное уравнение (8.5) заменим разностным, аппроксимируя
первую производную в дискретные моменты времени согласно
формуле
4% _ Тк - ть
#0‘
В результате получим
к-т
= жк +
(жк,
ик)б,
К=0,
М1.
Заменим также целевой функционал (8.6)
типа соответствующей интегральной суммой
(8.7)
интегрального
№М—1
(0,
тм
има)
—
У
(ть
чь)б.
(8.8)
к=0
Итак, мы пришли к дискретной задаче, в которой нужно
найти такое управление (10, и1, ..., ии_1). которое удовлетворяет ограничению |их| < 1,
=0, №-—1, и минимизирует функционал (8.8) при начальном условии хо = 40. Эта задача тем
лучше аппроксимирует исходную задачу (8.5), (8.6), чем больше число №.
"Так как функционал (8.8) рассматривается только при зна-
чениях ть и ик, удовлетворяющих закону движения (8.7), мы
можем опустить в сго аргументах тт, ..., Жм_1, т.е. будем писать
(19, 40,....им_1).
Положим,
что
№1
‚
—
Тм-т(ем-тьЧМ-ть... 5им—1) =
х
7
о
(..
(ик),
у
—
т =т, М,
К=М№М—т
ГД
ХМ-туаь
.... Фм-т
формулам (8.7).
гральной суммы
определяются
согласно рекуррентным
Другими словами, Гу_ш — это часть интев представлении целевого функционала (8.8),
282
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
относящаяся к моментам времени # = Ад,
= М№М—т, М-—1, ивычисленная в зависимости от состояния & м_т системы в момент
времени # = (М — т)б.
Обозначим
Им-т(ЕМ-т)
=
ша
| №-т
Ту—т(+ №М-т; ИМ-т».
им
_—1).
[<1
Применим описанный выше прием оптимизации от конца к
началу в рассматриваемой дискретной задаче. Согласно принр
>
р
>
*
ципу оптимальности,
управляющее
воздействие
и,
| должно
быть выбрано так, что
вм
(м)
= (ем-ьчм)=
шш
ими
Ту (Ем-ьим.
Для простоты считаем, что указанный минимум достигается
в единственной точке и значение и”, | определено однозначно,
т.с. тем самым определена функция ил, (м1).
На следующем этапе рассматриваем оптимизацию Гу,
захватывая два отрезка времени от (№ — 2)6 до №.
,
Ту—2(#
м2, им им)
—
= Ё +0,(фу
Так как
и,
им—2)0 +11 (имчм),
задача, сводится к определению и^;_›, для которого
Г
С
=
шш
[12 (#м_2,им_2)6 +Д (м1
[мм—2|51
)] ,
где ху_1 выражается через хм_о и иму_2, согласно закону
движения (8.7) при
=М№-—2, аи _ 1 = и, (#м—1). Тем самым
найдено оптимальное управление на двух последних отрезках
времени в зависимости от того, какое состояние тм_2 получит
система, на, момент времени (№ — 2)5.
Повторяем пропедуру. последовательно добавляя частичные
отрезки времени.
На А-м этапе нам необходимо определить
8.2. Уравнение Беллмана
283
оптимальное управление и\;_, из условия
им-ь(
*
*
=
шш
[им -ь| 51
значение
Гму_к-1
мЬ)
=
[ем -вуим к)
+ Тимм
где
*
м-в) = Тм (мимобк
.... им)
выражается
через
‚
Фм-к
КО,
и
им_ь,
М,
(8.9)
согласно
(8.7), следующим образом:
фмьи
= Жм_к+ 7 (м-в
им _ь)б.
Определив на, последнем этапе величину /10 (то) и управление
ий, можно по известному начальному состоянию 20 = 20 найти
последовательно 11, и1, ..., м1, и _1. Значение но(20) даст
минимальное значение функционала (8.8).
Соотношения
(8.9)
представляют собой рекуррентные соотношения Беллмана для данной задачи.
Приведенный алгоритм решения задачи оптимального управления (алгоритм динамического программирования) можно
перенести на общий случай задачи оптимального управления
с векторным законом движения (8.1).
При этом на каждом
шаге нужно будст искать минимум функции 7 персмснных, зависящей от г-мерного вектора управления.
Это приводит к
существенному
возрастанию
ции. Р. Беллман*“ предложил
подобных трудностей.
объема обрабатываемой информа-
некоторые
8.2. Уравнение
способы преодоления
Беллмана
Хотя метод динамического программирования ориентирован на решенис дискретных задач оптимального управления,
его идею, которая на основе принципа оптимальности дает рекуррентные соотношения, можно использовать при изучении
*См.: Беляман
Р., Дрейфус
С.
284
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
непрерывных задач. Непрерывные задачи также подчиняются
принципу оптимальности. Поэтому для них можно получить
уравнение, аналогичное рекурретным соотношениям Беллмана.
Пусть система имеет зажон движения (8.1), критерий оптимальности задается целевым функционалом
т
Пани] = || /оелида.
о
(8.10)
где #0 (ж, и) — непрерывная функция по совокупности аргументов, а начальное состоянис равно:
(0) = 2%.
Время
движения
Т известно,
а конечное
(8.11)
состояние
х(Т)
—
нет. Мы имеем задачу с фиксированным временем и свободным
правым концом.
Пусть 2*(Ю), ЕЕ [0,7], — оптимальная траектория, соответствующая оптимальному управлению и“().
Выберем некоторый момент времени т Е [0,1] и соответствующую точку
Ё = 2*(т) на оптимальной траектории.
Согласно принципу
оптимальности, участок траектории 2*(Р) от точки & до точки 2*(Т) является оптимальной траекторией. Это значит, что
этот участок доставляет наименьшее значение функционалу
т
1,
м) = леща
среди всех допустимых процессов (2(), и(1)) на отрезке времени [т, 7] с начальным состоянием ж(т) = &.
Положим
т
ж, м) 4.
нет)т) == ивы || :0 ен)
пш:
(517)
Тогда, при & = 20 ит=
т
0 мы получим величину (29,0),
пред-
ставляющую собой наименьшее значение функционала (8.10).
8.2. Уравнение Боллмана
285
Будем предполагать, что для любой точки & фазового
про-
странства и любого момента, времени т Е [0,Т] существует
оптимальная траектория (т.е. доставляющая наименьшее значение функционалу Г,(5,и)) с начальным условием ж(т) = &.
Тем самым функция (&,т) определена всюду на декартовом
произведении Е” х [0, Т]. Обозначив аргументы этой функции
через = и Ъ будем называть р(2,{) функцией Беллмана.
Согласно данному определению, функция Беллмана в точке
(2, №, О <Е<Т, равна наименьшему значению функционала,
[м] на вссх допустимых процессах с начальным состоянием
(6 =х.
Пусть (2*(%), и"(6)),
О<Е< ТТ, — оптимальный процесс
и
оптимальная
траектория
2*(Р)
удовлетворяет
начальному
условию 2*(0) = =°. Тогда
т
#(28,0) =
и
ЕЙ
|
т
(20, и) @= [г (=*(#),
и“ (9) 4.
(05517) 0
0
Для произвольного момента времени т
[0, 7] участок опти-
мальной траектории от точки 52* (т) до точки 2*(Т) сам по ссбс,
согласно принципу оптимальности, является оптимальным, т.е.
т
и(ж* (т),т)
ии
[лев
‚и (0) и
|
(Фи).
ОЕЕ
("<<т)т
Рассмотрим приращенис Ат и соответствующий этому прирашению момент времени т + Ат. В силу аддитивности определенного интеграла, имеем
Т
бе”(ет) = | (аби)
=
286
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Согласно принципу оптимальности, участок оптимальной
траектории от точки 2* (т + Ат) до точки =*(Т) сам является
оптимальной траекторией, т.е.
=
—
0
(50,
:
и)
& —_= шт" * (т + Ат),т+
Ат).
НАТ)фАт
Учитывая последнее равенство, соотношение
образовать к виду
(8.12) можно пре-
т+Ат
и(а*(т),т) = бони
оатутат)
(8.13)
Второе слагаемое в (8.13) зависит от состояния системы
2*(т-+|- Ат). В это состоянис, в свою очередь, система попала под
действием управления и*({), действовавшего на, интервале времени [т, т- Ат|. Следовательно, значение /+(5* (т-+-Ат),т + Ат)
определяется выбором управления на отрезке
[т, т + Ат].
Что-
бы представить это, рассмотрим различные допустимые упра-
вления ч(#) на отрезке [т, т
Ат].
Им будет соответствовать
пучок траекторий 2(#), исходящих из точки 2* (т) на оптимальной траектории (рис. 8.2).
На каждой траектории из этого пучка фазовая
точка зай-
мет в момент времени т + Ат некоторое положение (т - Ат).
Выбсрем управленис 1#(#) на отрезке [т | Ат, Т] так, чтобы трасктория (+) на этом участке была оптимальной, т.с. выбраннос
управление обеспечивает минимум функционалу
ТГ
Гааещ= || (ож).
т+Ат
(8.14)
8.2. Уравнение Беллмана
Хи
287
; ж(Т)
х“(Т)
х1
Хх,
Рис.
8.2
Такой выбор управления определяет дальнейшее продолжение
каждой траектории рассматриваемого пучка (см. рис. 8.2). При
этом минимальные значения функционала Г.+лт|[т,и| вдоль
траекторий
пучка различны
и зависят
от точки (т + Ат):
т
нии
(ОЕ
("АТО
Положение
#0 (2(8),и(#))
4 = и(=(т-+ Ат) т+ Дт).
ЗТ)
+1 Ат
точки ж(т + Ат) определяется выбором управления
и(®) на отрезке [т, т+Ат|. Поэтому значение д (2(т+Ат),т+Ат)
зависит от управления и(#), Е [т т+ Ат..
Рассмотрим значения функционала Г,[®,и] на траекториях
пучка, построенного выше.
Учитывая, что участок каждой
траектории 2(Р) пучка от точки 2(т-+ Ат) до точки ж(Т)
оптимален, т.е. доставляет наименьшее значение функционалу
Гена,м], получасм
т+Ат
Ге. и] = ] Ле, и (о) ии
+ Ат,т+ Ат).
(815)
т
Выберем минимальное из значений /,[т,и]. Так как оба, слагаемых в
(8.15) справа, зависят только от выбора, управления (1)
288
8. МЕТОД
ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
на, интервале [т, т + Ал|, то и минимальное значение 1[* определяется выбором управления на, этом интервале, т.е.
=
шш
т
Гы.
ОЕ
(ТО
71
й
]
Зт+Ат)
Построенный пучок траекторий является подмножеством более
широкого множества всех допустимых функций, на которых
ишется
наименьшее
значение
функционала
Г;.
Поэтому
верно
неравенство
>
пы
Гиви = [[2° ии] = и(а” (тт).
(8.16)
ет)
Но оптимальная трасктория =* ($) содержится в пучке. Поэтому
в неравенстве (8.16) на самом деле имеет место равенство, т.е.
ши
ци,
Геи == (т
ие’ ),т),(т),т
Бж,ы|
(75<т+Ат)
откуда с учетом (8.15) получаем
т+Ат
(= (т),т) =
ии
НЫ
(]
(9) @&-+
(=,
+в (=(т+Ат),т+Ат)|.
(8.17)
Заметим, что в соответствии с (8.1)
ж(т+ Ат) =ж(т) + 2(т)Ат +о(Ат) =
= ж(т) - 1(®(т),ч(т)) Ат + о(Ат).
Предположим,
ференцируема
что функция Беллмана /1(2,{)
по всем своим аргументам.
(8.18)
непрерывно дифТогда, согласно
(8.18), имеем
и(=(т + Ат), т + Дт) = и(ж(т),т) +
(ат)
| 8 (в(т)уи(т)) Ат,ди 6)
жит).
Ат-о(Ат).
(8.19)
8.2. Уравнение Беллмана
289
Введем обозначение
УЗ
ди
|
(стар, Х) =>
:
и перепишем
(8.19) в виде
в(=(т + Ат),т + Дт) = (ж(т),т) +
+ (аа
Аб
). (т У)
(2
(2(т),т)
Ат
о(Ат).
Учитывая последнее соотношение, а также то, что для траекторий т(#) пучка имеет место равенство 2(т) = ж*(т), перепишем
равенство
(8.17) в виде
т+Ат
и(ж*(т),т) =
шш
]
и(ВеЕЫ
(т <т+Ат)
1°(2(4),и(8)) &-
т
(=* (тт) 1 (27), 4)
Е Ца (тут)
Согласно
определению,
функция
Ат-+ (А
/+(2*(т),т)
Ат
.
(8.20)
получена, в ре-
зультате минимизации функционала, /.[%,%] по всем допустимым
управлениям
и(),
Е [т, Т], т.е. эта функция уже не зави*
Эн
к
сит от и. Поэтому слагаемые /#(2*(т),т) и эЕ (2 (т)›т) в правой
части равенства (8.20) можно вынести за знак минимума.
сле сокращений получим
й
(в)
дт-
ша
и)
кита
+ (аа и
По-
т+Ат
] (=, идуй+
т
Пееуиб)) Ат+ (А)
ь
290
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Предположим, что и(#) непрерывна на отрезке [т, т + Ат].
Тогда, разделив это равенство на Ат и перейдя к пределу при
Ат
0 (при
этом
дат
ОР
Ат—0
Беллмана
В | (=* (т),т)
= 0),
приходим
к
уравнению
2
= и(т)ЕО
ов, |летуще))
+
“ди
Лещ),
в
р
да
(а (т),
или
ЕЕд
по [бб (т)) + (таль Нету и(т))]. (822)
О
где
для
ифЕЙ
удобства,
оптимальная
траектория
обозначена
просто
ж(®). К уравнению Беллмана можно добавить краевые условия
в(=,Т)
= 0,
(8.23)
вытекающие непосредственно из определения функции Беллмана.
Функция
функция
/1(2,1)
в данном
им_т(хм-т)
программирования,
случае
играет
ту же
в дискретном варианте
а уравнснис
Беллмана
роль,
что и
динамического
аналогично
рскур-
рентным соотношениям Беллмана.
Уравнение Беллмана представляет собой дифференциальное уравнение в частных производных относительно функции
и(ж,Ю. Но это уравнение не является линейным из-за наличия
в выражении справа в (8.22) операции взятия минимума. Эта
операция фактически означает подстановку в уравнение значения и*, на котором достигается минимум и которое меняется в
зависимости
от
значений
хи
рта
и,
т.е.
фактически
нелинейной функцией этих переменных.
Уравнение Беллмана можно использовать
дачи
ные
(8.1),
выше
(8.10),
(8.11)
преположения
следующим
выполняются
является
для решения
образом.
и /*(2,$)
за
Если
сделан-
—
решение
8.2. Уравнение Беллмана
291
задачи (8.22), (8.23), то сразу же получаем наименьшее значение целевого функционала, (оно равно и*(2°,0)). Чтобы найти оптимальную траекторию, нужно опредслить оптимальнос
управление м” как функцию текущего положения и градиента ртади*: и = и(т,‚отад и”). В результате из закона, движения
при
и = @(х,‚отаар”)
с начальными
условиями
(0)
= 20
мы получаем задачу Коши, решением которой и будет оптимальная траектория. Зная оптимальную траекторию, мы уже
можем найти оптимальное управление как функцию времени:
и (В =Я(2* (В, таар*(=(4),1)).
Рассмотрим другую задачу, а именно добавим к условиям
(8.1), (8.10), (8.11) условие закрепления на правом конце
ж(Т) = =т,
(8.24)
где значение тт задано, а Т заранее не известно.
В этом случае функция Беллмана зависит только от текущего состояния т: и= и(®). Действительно, по определению
т
и(в,т) = ] Раба.
Но согласно
грала,
свойствам
автономного
процесса
значение
инте-
ТР
] ива
при фиксированных 2*( и и*(Р зависит только от длины
Т —т интервала интегрирования, который можно определить
из автономной системы (8.1), зная точки 2” = 2*(т) и 2*(Т) на
траектории. Значит, ТГ — т есть функция от этих двух точек, а
и явно не зависит от $. Для задачи (8.1), (8.10), (8.11), (8.24) с
помошью аналогичных рассуждений можно получить уравнение
Беллмана, которое в этом случае имеет вид
ово | оао) + (ата, (ат) ит)) | = 0
292
8. МЕТОД ДИНАМИЧЕСКОГО
Практическая
вается
реализация
на определенные
ПРОГРАММИРОВАНИЯ
предложенного
трудности.
метода,
Например,
сти уравнения Беллмана нельзя назвать простым,
входит
операция
взятия
минимума.
ность состоит в том, что функция
дифференцируемой
ренцируемость
переключений).
мана
—
одно
(например,
нарушается
Однако
из
в
Но
самая
/#(2,{) может
для
линейных
точках,
на
которыс
ча-
так как туда
главная
труд-
не быть всюду
систем
принадлежащих
дифференцируемость
предположений,
наталки-
вид правой
функции
опирался
диффелинии
Беллвывод
уравнения Белламана.
Пример 8.2. Рассмотрим задачу оптимальной одноосной
стабилизации космического аппарата с помощью маховика”.
Пусть космический аппарат, управляемый гироскопом-маховиком, имеет одну степень свободы, связанную с угловым
движением аппарата вокруг неподвижной оси, проходящей через его центр масс. Обозначим через ф угол отклонения аппарата от заданного направления, а через и) угловую скорость
вращения маховика относительно аппарата. Тогда при опредсленных допущениях движснис системы космичсский аппарат —
маховик относительно неподвижной оси можно описать системой уравнений
(Г
+ )$
а
(+
+ Ти
—
0,
ф) = -пть
(8.25)
где Г; Г, — моменты инерции соответственно аппарата, и маховика относительно неподвижной оси; 1% — момент двигателя
маховика.
К системе (8.25) следует добавить уравнение электрического двигателя маховика. Если это двигатель постоянного тока,
то при некоторых
допущениях
момент
7%, развиваемый
двига-
телем, может быть выражен уравнением
т = Е(и-+ №),
*См.:
Д.8.1,
а также:
Летов
А.М.
(8.26)
8.2. Уравнение Беллмана
где и — управляющее напряжение;
рактеризующие данный двигатель.
293
К и { — постоянные, хаБудем считать, что на
управление и нет никаких ограничений.
Система (8.25) совместно с уравнением (8.26) приводится к
уравнению
$ =Е(и — сф).
Коэффициент
с определяется
из условия,
ства движения
всей системы
космический
что
момент
аппарат
—
количемаховик
равен нулю:
(4 +1,)Ф-+
1
= 0.
Отсюда
+1
.
_В+Ы
ыы
Введя фазовые переменные т1 =,
дартную форму уравнений движения:
11
|
= 42
1.
т2 = ф, получим
|
(8.27)
12 = ао + Би,
Кс
геа=-т;
Зададим
стан-
К
ь= т.
начальное
состояние
системы
(0) = 20.
В каче-
стве целевого функционала выберем
ос
Печ = ] (опал + арго + Ви?) 4,
(8.28)
0
где от, 2, В
некоторые положительные постоянные. Рассмотрим задачу нахождения управления, переводящего систему из
начального состояния 9 в конечное (00) = 0 и доставляющсго минимум целевому функционалу (8.28). Сформулированная
задача, — один из вариантов задачи оптимальной стабилизации
(см. Д.8.1.
294
8. МЕТОД
ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Рассматриваемую задачу можно интерпретировать как задачу с фиксированными концами и фиксированным временем
Т = со процесса. Задача, автономна, и функция Беллмана, заВИСИТ
ТОЛЬКО
ОТ
СОСТОЯНИЯ
$.
Уравнение
Беллмана,
в
данном
случае имеет вид
шр(о2
й
Поскольку
Ч 2275 + Ви?+ Эр.
жа
+ ОЭ
дут
на, управление
и нет
072
(ах + 8)
ограничений,
=0.
(8.29)
для определения
значения й, при котором достигастся указанный минимум,
приравняем нулю производную по и выражения в скобках.
Получим
И.
(8.30)
Подставив найденную функцию в уравнение (8.29), получим
нелинейное уравнение в частных производных первого порядка:
р
р
р
2
она + ао >08. + а2=—
ди — 48
18 (5
ди )
91
д:
915
= 0.
(8.31)
Краевые условия для функции Беллмана /#(2(0<)) = 0 с учетом
консчного состояния (со) = 0 принимают вид 4 (0} =0. Решсние будем искать в виде квадратичной формы:
и(тл,т2) = Аз? +2Втх2 + Са?
(8.32)
е неизвестными коэффициентами.
Подставим
(8.32)
в дифференциальное
уравнение
(8.31)
и,
пользуясь независимостью переменных т, 12, приравняем нулю коэффициенты
при различных произведениях
переменных.
Из системы трех уравнений с тремя нсизвестными А, В, С получим
А— 1а
-/а2 от
В +
С
2Баоол+ 2 260н Иса В,
В=
а + \/а?
В? + №? Во + оВуоВ.
тр
$2
ув
ь
‚>
8.3. Уравнение Беллмана в задаче быстродействия
.
Если теперь для найденной функции и вычислить
295
ды
№
2
и вос-
пользоваться формулой (8.30), то мы получим явное выражение
для оптимального управления:
Оптимальное управление найдено в зависимости от фазовых
координат, т.е. решена задача, синтеза. Отметим, что синтезирующшая функция линейна.
8.3. Уравнение
в задаче
Беллмана
быстродействия
Рассмотрим задачу оптимального
ном движения
&=7(ж,и),
быстродействия
цчЕП,
с зако-
(8.33)
начальным состоянием 2(0)=т! и конечным состоянием ®(Т) =
==.
Для этой задачи с фиксированными концами и свободным
временем Т процесса функция Беллмана зависит только от текущего состояния: д = (2). Если допустить, что выполнены
оба предположения (см. 8.2) о функции п, то необходимое условие оптимальности сведется к уравнению Беллмана
ша (1 + (тар, 1(т,и))) =0,
Е
ИЛИ
из (эта4р, 1(ж,ч)) =-—1.
Е
Краевое условие имеет вид (22) = 0.
(8.34)
296
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Очевидно, что ссли (5*(0, и*(1)) — оптимальный
процесс
с временем Т, то на отрезке [0, Т] выполнястся тождество
(втади(а” (4), 1(э" (м
(1))) = —1.
(8.35)
Функция /1(т) имеет в этом случае простой смысл: ее значение в точке х равно времени оптимального по быстродействию
перехода фазовой точки из положения х в фиксированное положение ж?. Наглядную геометрическую интерпретацию допускает и уравнение Беллмана.
Пусть объект находится в
состоянии ®. Рассмотрим в фазовом пространстве поверхность
уровня (2) = (2) = сопз6, проходящую через эту точку &. Эта
поверхность представляет собой множество всех точек, из которых фазовая точка переходит в точку 5? за одно и то же
время /1(2). Из соотношения (8.34) следует, что
таз (— втаЧи(@), /(8и)) 1.
Е
Воспользуемся тем, что максимум в левой части равенства
достигается при значении и = и” оптльмального управления,
соответствующем состоянию &. Это означает, что „оптимальный всктор фазовой скорости“ }(5,ч*) образует с вектором
— ета и(®) острый угол (оптимальный воктор направлен в сторону убывания функции 4). Другими словами, фазовая точка
ж(1) на оптимальной траектории перемещается в сторону поверхности уровня функции и с менышим временем перехода,
и(®).
Заметим, что минимизация по и выражения в левой части (8.34) позволяет определить оптимальное управление и*
как функцию от этайи. При подстановке указанного значения и* в тождество (8.35) получим не содержащее и уравнение
в частных производных первого порядка. Решенис этого уравнения должно удовлетворять краевому условию (2?) =0. Если
это решение удастся найти, то будет решена, задача, синтеза,
так как будет найдена синтезирующая функция, или, другими
8.3. Уравнение Беллмана в задаче быстродействия
297
словами, оптимальное управление как функция фазовых координат и* = и*(т). К сожалению, получить решение уравнения
(8.35) удается лишь в простейших случаях.
Пример 8.3. Рассмотрим задачу оптимального быстродействия с законом движения
ри
—
То
=,
42,
с ограничением [и <1 на скалярное управление и(1), с переходом из начального состояния х = (71, 12)" в начало координат
(см. 7.5).
В этом случае уравнение Беллмана имеет вид
„(ОН
м
а
краевое
условие
\_
ди
р и -Ъь
(8.36)
таково:
(0,0) = 0.
(8.37)
Предположим, что функция и непрерывна и имеет непрерывные частные производные по 21 и 72. Поскольку из постановки задачи выполнение этих условий не следует, дальнейшее
решение носит эвристический характер.
Из уравнения
управление
(8.36)
вытекает,
что оптимальным
является
В
и = — мп о
(8.38)
Учтем это в уравнении Беллмана:
+1=0.
(8.39)
Согласно (8.38), оптимальное управление м” может принимать значения Ги —1.
Рассмотрим на фазовой плоскости
область Г_1, в которой и* = —1, и область Г, в которой и* = 1.
298
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
В области Г_1 уравнение (8.39) имеет вид
Ра“
а, в области
8.40
)
р
ы
[д —
ди
+=
2+
ду
Решение
+1=0,
Ото
Отт т
неоднородного
ди
02
[УПП.
(8.40)
будем
искать
в
Используя правило диф-
ференцирования неявно заданной функции
[У], находим
де _
ды
де _
0
01
ду °
912
ду `
ди
)
(8
о
уравнения
неявном виде У(р,11,12) =0
.41
+1=0.
+
ди
Подставляя эти выражения в уравнение (8.40), получаем
Записываем уравнение характеристик
[УТ]:
4
ато
ан
ее.
12
—1
8.42
—1
Отсюда, решая уравнение с разделяющимися
Что
__
ат
—1
=
2
)
переменными
?
находим уравнение для оптимальных фазовых кривых в области
Бу (т.е. при
=-1):
+ 1+
5
С
= Ст,
(8.43)
8.3. Уравнение Беллмана в задаче быстродействия
где С! —
постоянная
первый интеграл
интегрирования.
системы
системе
найти
еще
еще
одно
уравнение
дает
(8.42):
1(71,22)
Несложно
Это
299
один
=
#1
=
первый
уравнение
имеет
о.
интеграл,
так
разделяющиеся
как
в этой
переменные:
$2(21,2) = и — 12.
Зная два первых интеграла, мы можем записать общее решение
уравнения в частных производных:
2
Ф(и — 42,
где
Ф( 1,22)
—
произвольная
+ >)
=0,
непрерывно
дифференцирусмая
функция.
Предположим, что уравнение Ф(ф1. 02} =0 можно
разрешить относительно первого аргумента в виде ф1 = Н(42).
Тогда мы можем записать
ие
т.е. получим
+Н(а+®),
вид выражения
(8.44)
для функции
Беллмана
в области
Г.
Аналогично
получаем
рассматривается
уравнение
оптимальных
ситуация
фазовых
в области
кривых
в
Ё1.
Мы
виде
2
1 - р = 62 = с018
(8.45)
и вид выражения для функции Беллмана,
=
+9(-=1 + =).
2
Формулы (8.44) и (8.46) дают лишь
туре решения уравнения Беллмана, так
вестная функция. Но, зная уравнения
мальных фазовых кривых, мы можем
лмана.
Для этого на плоскости
х1Ох2
(8.46)
представление о струккак в них входит неиз(8.43), (8.45) для оптинайти и функцию Бел-
строим оптимальную
300
8. МЕТОД
ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
траскторию,
В
хз
т.
9-1
№
.
«|
2
Рис.
сс
из
дуг двух парабол из семейств
(8.43), (8.45), как это делалось ранее (см. 7.5). Построснная трасктория должна со-
тт
и=1
составляя
А
единять
начальную
точку
хх
а:
началом
координат.
(рис.,
ь
8.3).
с
Теперь можно вычислить время д движения вдоль
построснд
р
8.3
ной оптимальной траектории
и получить конкретный вид функции Беллмана (см. задачу 7.6).
Для точки х выше линии переключений АОВ имеем
р(ат, 22) = 2\/а1 +
а
для
точки
&
ниже
линии
2
+22,
переключения
и(т1,12) =2)
|
1+5
и?
(8.47)
—
— 2.
(8.48)
Непосредственной подстановкой можно убедиться, что функции (8.47) и (8.48) являются решениями уравнений (8.40) и (8.41)
соответственно.
Покажем, что ни в одной точке линии переключений АОВ
функция Беллмана /1(11,х2} не имеет частных производных.
Возьмем на дуге ОА произвольную точку С(хб, 25), т.е. 14 =
Тре
= 5(25)?.
Так как функция д выше линии АОВ
(или правее,
что то же самое) задается формулой (8.47), то для вычисления
правосторонней производной по 11 мы должны использовать
именно эту формулу:
д
|
пб
1
=
1
8.4. Связь с принцином максимума
производная
(8.48).
#(т1,15) =2
вычисляется
с использованием
Но при этом
21+
„с\2
во
А левосторонняя
представления
301
=
1-15,
и мы видим, что левосторонней конечной производной в точке
21 =‘
нс
существует,
так
как
функция
у = ух
не
диффе-
ренцируема в точке 0. Можно так же показать, что частная
производная по т2 имост в точках линии порсключения аналогичный разрыв.
Приведенный пример показывает, что условия Беллмана,
о существовании у функции Беллмана непрерывных частных
производных нарушаются даже в простейших ситуациях. Поэтому вопрос о применимости метода динамического программирования к задачам оптимального управления с ограничениями на, управление требуст дополнительного обоснования.
8.4. Связь метода
динамического программирования
с принципом
В 8.2 уравнение Беллмана
вие оптимальности
управления
максимума
получено как необходимое услои, значит,
в определенном
смы-
сле перекликается с принципом максимума.
Покажем, каким
образом на основе метода динамического программирования
можно получить условия принципа максимума.
Рассмотрим задачу оттимального управления с законом
движения
(8.1), целевым функционалом
(8.10), фиксированны-
ми начальным (8.11) и конечным (8.24) состояниями.
Время
Т процесса считаем неизвестным.
В качестве вектора %(#)
управлений выбираем кусочно непрерывные вектор-функпии со
значениями из области управления (0 Е В, являющейся замкнутым выпуклым множеством.
302
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Согласно принципу динамического управления Беллмана,
для оптимального процесса (2*(#), и*(#)) найдется такое решенис /(х2) уравнения Беллмана,
.
и,
т
ди
[и (е,ч) + >. =
в
(2,и) =0,
(8.19)
что “(В = #(х”*(Ю,отаар(2*(4))). где и(х,рта4и) — значение,
при котором
достигается минимум
в правой части уравнения
(8.49). Покажем, что из уравнения (8.49) следует существование некоторого вектора Ф, который удовлетворяет соотношениям
принципа
максимума.
Пусть и(%) — функция Беллмана, которая соответствует
оптимальному процессу (2”^(,
м” (1). Введем следующие обозначения:
+
шо = | аи),
8= (=),
па =шчще)
0
Используя эти обозначения, преобразуем уравнение Беллмана:
т
или, с учетом очевидного тождества, — нии Р = шах(-—Р),
(Тан
Е
—_
Заметим,
обозначения
что функции
д; =
иг
972)
}(х,и)
др
дх;'
„
9)
,
не зависят
1=0, п.
(850
= 0.
8.50
от хо.
Введем
(8.51)
8.4. Связь с принципом максимума
303
Полагая
где
д
$ =
тб
(40, 41, ..., 9);
т
Л=
(10, [1,..., 1"),
можно
запи-
сать уравнение Беллмана в следующем виде:
шах (2. Г) = шах Н(Ф. 2, и) = 0.
иЕГ
иЕЙ
Введенные нами сопряженные переменные $; и функция
Понтрягина Н (ср. с (7.7) } получены пока чисто формальным
преобразованием из уравнения Беллмана.
Покажем, что Ф
удовлетворяст сопряженной системе
сл
05
—
з
<К?
ЭН
= де; ’
|]
—_
=
&
>
а;
Потребусм, чтобы функция Беллмана (®) имела непрерывные производные второго порядка. Тогда функция
9(®,и) =У` (2
(8.53)
®ле
имеет непрерывные производные первого порядка.
Оказывается, что для оптимального процесса (2(0, и(1)
при фиксированном фе [0, 7] функция 9(5,и(#)} переменного &
достигает в точке х = 2(® максимального значения, равного
нулю. Это следует из уравнения Беллмана (8.50). При этом
под равенством & = ж(}} мы понимаем выполнение двух соот-
ношений
+
х=ж(®,
о = /| Ло)
0
а
304
8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Так как функция 9(%,и(®)) достигаст максимума в точке &(,
то
99(8,
д, и)
=0,0,
яж)
Е=Ом,
0,п,
16
1Е[0,Т..
[0,Т]
(8.54)
.5
и=и(+)
Учитывая,
что
з (8.54) получаем соотношение
т
(5.о
2.и)} =
=0
которое выполняется на оптимальном процессе (2(®, ч(#).
Так как
а
рт
—_
ди
(- 5.)
=>.
@т
02
п
дтуджь
—
#72.
_
дадль
то соотношение (8.55) преобразуется к виду
а
9"
_
или, с учетом обозначений
г
(8.51),
9 \ эА
р
9?й
Ш
—_
{
(ти),
Д.8.1. Оптимальная стабилизация
305
Итак,
Уравнения (8.52) были получены в предположении, что
функция Беллмана, 4 имеет непрерывные производные второго
порядка. Это, конечно, не всегда так. Поэтому проведенные
рассуждения носят иллюстративный характер и не могут всерьез рассматриваться как обоснования принципа максимума.
Скорее они говорят о том, что принцип максимума и принцип динамического программирования имеют пересекающиеся
„сферы влияния“. При отсутствии ограничений на управлснис,
когда всс функции являются гладкими, оба, принципа работают. Но каждый принцип имеет область, в которой соперник
конкурировать не может: уравнение Беллмана, получено при
дополнительных предположениях, а принцип максимума хуже
приспособлен для решения задач дискретного характера.
Дополнение
Пусть
ДлЯ
8.1. Оптимальная
ИСХОДНОЙ
стабилизация
системы
9 = Лу,и)
(8.56)
при заданном управлении и = и(Р) и заданном начальном условии У(#) =у! построена траектория у = ф(й), т.е. решена соответствующая задача Коиие. Такое движение назовем невозмущенным движением.
Рассмотрим еше одно управление
и = (1) и соответствующую этому управлению траекторию
у= (1), которую назовем возмущенным движением.
Задача стабилизации невозмущенного движения у=ф(#)
состоит в выборс такой поправки Аи(® =%(® — и(®, при которой движение 1р({} устойчиво.
Положим %( =4( —ф(®) и вместе с Аи(К подставим в
уравнения движения (8.56):
ф=ф-ф=
Л
ф+ви+
Ди)
—
(Е ф,м).
306
8. МЕТОД ДИНАМИЧЕСКОГО
Считая
траекторию
ф(#)
ПРОГРАММИРОВАНИЯ
и управление
и(®) фиксированными,
получаем уравнения
&=РЕ(р
т, Аи),
которые называют уравнениями возмущенного движения.
Предположим, что выполняются следующие условия:
1) все
компоненты
вектора
состояния
% в любой
момент
времени известны;
2) по траектории 2(1) можно восстановить вектор управления Ац(Р), который можно рассматривать как функцию
времени и текущего состояния Ац(Ь т);
3) управление Ац(Ь=®) должно обсспечивать асимптотичсскую устойчивость невозмущенного
движения 2(#) = 0;
4) Аи(1,0) =0;
5) вектор-функция 14 (+,ж) определена и непрерывна в области О: $20, |1; < Ё, 1 =Тп, где & = (41, 12, ..., би);
6) правые части уравнений (8.57) удовлетворяют условиям
тсорсмы
Коши
о существовании
и сдинственности
решения
системы обыкновенных дифференциальных уравнений [УП]
при любых начальных условиях в области Г);
7) на вектор управления и нет ограничений, т.е. его компоненты могут принимать любые сколь угодно большие значения,
вектор-функция Е(+ т, и) определена при любом значении и.
Задача
оптимальной
стабилизации
движения состоит в следующем.
невозмущенного
Пусть выбран критерий каче-
ства стабилизации, который может отражать такие требования
к процессу стабилизации, как его монотонность, минимизация
объема используемых ресурсов и т.п. Этот критерий будем
представлять как некоторый функционал вида,
со
Пе, Аи] = ] Е’(ьж,Ди) а.
[о
(8.58)
0.8.1. Оптимальная стабилизация
307
'Требуется найти такое управление Аи = и" ($2), которое обес-
печивает асимптотическую устойчивость невозмущенного движения 2(#) = 0 в силу уравнения
&=Р(рж,Аи(фт))
и которое среди всех управлений, также обеспечивающих асимптотическую
устойчивость
невозмущенного
движения,
прида-
ет целевому функционалу (8.58) наименьшее значение, т.е. для
любого управления Аи(+. 2), решающего задачу стабилизации,
неравенство
Г”,
выполняется
р.
где 2*(Р
при
={(&
любых
1,
и ж({) —
...;
Аш] < Г, Ам
начальных
Я»):
>
0,
(8.59)
условиях
из
области
т] < Е) =Тп},
траектории системы при заданных началь-
ных условиях и управлениях
Аи”
и Аи
соответственно.
Начальные условия ®(Н) = ж' играют роль начального возмущения,
а
асимптотическая
устойчивость
означает,
тто
наз
чальное возмущение в процессе движения компенсируется за
счет управления. Если неравенство (8.59) выполняется при любых, необязательно малых, начальных возмущениях, то говорят
0б оптимальной
стабилизации
в целом.
Задача, оптимальной стабилизации
это задача оптиьмального управления для системы с законом движения (8.57), целевым функционалом (8.58), фиксированным временем процесса,
Т = со, фиксированным левым концом (#1) = жи
ным
правым
концом
2(о°) = 0.
Ее можно
фиксирован-
полностью
решить
в
случае, когда управление скалярно (и =цЕ®), уравнения возмущенного движения являются линейными автономными, т.е.
имеют вид & = Ах + ВАи (матрицы А, В постоянны), а интегралит, пелевого функционала Р°( х, Аи) есть квадратичная
308
8. МЕТОД ДИНАМИЧЕСКОГО
форма
той 0:
с постоянной
ПРОГРАММИРОВАНИЯ
симметрической
матрицей
№
и констан-
о
Е`(ф®,
Аи) —=х тт №+4(Ац)“.2
Решение задачи в этом частном случае составляет основное
содержание метода аналитического конструирования регулятора”. Оно строится с помошью метода динамического проараммирования Беллмана.
Так как эта задача, представляет собой автономную задачу
оптимального управления с фиксированными концами, функция
Беллмана зависит только от фазовых координат:
и = р(%).
Уравнение Беллмана в данном случае имеет вид
пит [2
№ +аДи? + (ога4и, Аж + ВДи}| =0.
(8.60)
Здесь оно используется как достаточное условие оптимальности”.
Из уравнения (8.60) получаем управление Аи“, доставля-
ющее минимум левой части:
Аи” = — 5: (тай, В).
(8.61)
Ч
Подставив найденное управление Аи” в уравнение (8.60), получасм нслинсийнос уравнснис в частных производных первого
порядка относительно функции Беллмана (2)
1
ж`М№Мв + (отади, Ав) — ча ((отаи, В))? =0
с краевым
(8.62)
условием
(а (о°)} = р(0) =0.
*См.: Летов
**По
поводу
А.М.
обоснования
уравнения
статочного условия оптимальности
Беллмана
как
см.: Болтянский
необходимого
В.Г.
(1964 г.)
и
до-
Вопросы и задачи
309
Решение уравнения (8.62) следует искать в виде квадратичной формы и(=) = =`Рх с неизвестной симметрической матри-
цей Р порядка ® (нсизвсстных элементов 7(® - 1)/2).
вив это представление в уравнение, получим
Подста-
2” (м +2РА- «РВВ"Р) &=0,
откуда вытекает матричное уравнение”
№М+2РА- ‚РВВ"Р = 0.
Решив это матричное
Беллмана,
а затем
уравнение,
управление
мы можем
Ам”
как
найти функцию
функцию
фазовых
координат:
Аш
1
= —-В"Рх.
4
Таким образом, метод аналитического конструирования
позволяет решить задачу синтеза, при этом синтезирующая
функция линейна.
Приведенный пример использования уравнения Беллмана
один из немногих. так как решить его удается редко. В этой
связи упомянем линейные автономные системы с критерием
обобщенной работы**.
Вопросы
и задачи
8.1. Используя метод динамического программирования,
ренгите задачу оптимального быстродействия
&=авфи,
н)=а,
2()=0
и <1.
* Уравнение такого типа в литературе называют матричным уравнением
Риккати.
**См.: Красовский
А.А.
310
8. МЕТОД
ДИНАМИЧЕСКОГО
8.2. Составьте уравнение
оптимального управления:
ть
[гаельтай
.
0
12(0)
21 = и51
я
в следующих
+ 22
?
задачах
1 (0=)21,
22=и
= 25
.
,
И
6)
Беллмана
.
т
а)
ПРОГРАММИРОВАНИЯ
п
лаз
1
,
= 111-242,
р
21 (0 =21,
12—42,
0
22 (0) = #5, ш|< 1, || < 1.
Учитывая вид области управления И, запишите соответствующее уравнение в частных производных для функции Беллмана
о 12, Т заданы).
р
(хт,
8.3.
Составьтс
оптимального
областью
уравнснис
быстродействия
управления
( вида,
Беллмана
для линсиной
с законом
(7.37).
движения
Учитывая
вид
задачи
(7.30)
и
(И, запи-
итите соответствующее уравнение в частных производных для
функции Беллмана.
ЧАСТЬ
Ш
Прямые методы
вариационного
исчисления
... Часто бывает очень трудно найти
выражение, которое было бы максимуМом.
ци
минимумом.
Леонард
Эйлер
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ ЗАДАЧ
Первые две части книги посвящены изучению задач, связанных с поиском экстремума фуниционала, определенного на,
нскотором множестве функций.
Как мы видели, во многих
случаях решение такой задачи сводится к решению системы
обыкновенных дифференциальных уравнений (ОДУ) или уравнений в частных производных.
Систему дифференциальных
уравнений можно рассматривать как операторное уравнение.
Таким образом, задача поиска экстремума функционала, сводится (при определенных ограничениях) к решению некоторого
операторного уравнения.
Это аналогично тому, что задача,
поиска минимума функции многих переменных с помощью необходимого условия экстремума может быть сведена к задаче
решения системы нелинейных уравнсний.
Однако есть и обратная связь, когда решение операторного уравнения (и аналогично системы нелинейных уравнений)
можно заменить решением некоторой вариационной задачи (соответственно задачи поиска минимума функции многих перемснных).
Можно
также
интерпретировать
рассматриваемое
операторное уравнение как уравнение на определение стационарных точек функционала, специальным образом подобранного.
Построение математических моделей на, основе вариационных
задач
в
современной
науке
используется
весьма
широко.
Это объясняется тем обстоятельством, что многие фундаментальные принципы в самых различных предметных областях
наиболее естественно формулируются как вариационные принципы. Достаточно в этой связи упомянуть закон сохранения
энергии, который естественно сформулировать как равенство
нулю вариации функционала энергии системы.
314
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
Сведение вариационной задачи (т.е. задачи поиска либо точек экстремума функционала, либо его стационарных точек) к
операторному уравнению — далеко не всегда хороший способ
решения задачи. Это обстоятельство привело к разработке ряда методов, в которых решение вариационной задачи можно
найти
ний.
без
использования
Такие методы
прямыми
систем
решения
методами.
Эти
дифференциальных
вариационных
методы,
как
уравне-
задач называют
правило,
сводят-
ся к построению последовательности приближений к точному
решению задачи, а каждое приближение находится как решенис системы функциональных уравнений, в которую нс входят
производные неизвестных функций.
Зачастую система, функ-
циональных уравнений представляет собой систему линейных
алгобраичсских уравнений (СЛАУ), а решение СЛАУ найти су-
щественно проще, чем решение операторного уравнения.
9.1. Операторное
Любое
жества
отображение
Р(А}
функций
уравнение
А: 2(А)
В(А)
в некоторое
из некоторого
множество
В(А)
мно-
функций
называют оператором.
Во многих случаях в качестве математической модели
исследуемого объекта, описываемого векторной функцией и,
можно рассматривать уравнение вида,
А(и) =Х,
содержащее
Р(А).
оператор
ие (А)
А с некоторой
областью
(9.1)
определения
Этот оператор отражает свойства, объекта и действует
на искомую функцию и (вообще говоря, векторную), и заданную функцию } (в общем случае тоже векторную), характеризующую внешнее воздействие на этот объект.
Мы
ограничимся случаем, когда область определения 2(А)
оператора
А является
подмножеством
некоторого
линсйного
пространства.
Линейное пространство, как правило бесконечномерное, элементами которого являются функции, часто
9.1. Операторное уравнение
315
называют функциональным пространством.
Функциональное пространство наделяют какой-либо структурой, позволяющей оперировать с понятием непрерывности. В частности, функциональное пространство может быть нормированным (определена норма) или евклидовым
(задано скалярное
произведение). Евклидово пространство можно рассматривать
как
частный
случай
нормированного
пространства,
посколь-
ку скалярное произведение естественным образом индуцирует
норму, называемую евклидовой нормой. В нормированных пространствах можно рассматривать сходящиеся последовательности [1Х]. Критерий Коши верен не для всякого нормированного
пространства, т.е. в нормированном пространстве могут сушествовать фундаментальные последовательности, не имеющие
предела. Если в данном нормированном (свклидовом с евклидовой нормой) пространстве любая фундаментальная последовательность сходится, то такое пространство называют полным.
Полное бесконечномерное евклидово пространство традицион-
но называют гильбертовым“.
Пример 9.1. Множество Г2(0) функций, суммируемых с
квадратом на измеримом множестве 9 с Е, представляет
собой гильбертово пространство со скалярным произведением
дя= | Гаде ве
(9.2)
О
Элементами этого пространства являются
для которых конечен интеграл Лебега
=
функции
] КО
}: 9 + ®,
(9.3)
О
”Д. Гильберт
большое
ный
влияние
вклад
в
(1862-1943)
на
развитие
исчисления. Положил
исчислении.
развитие
как
— всликий немецкий математик,
современной
функционального
математики.
анализа,
начало развитию прямых
так
Внес
и
оказавший
значитель-
вариационного
методов в вариационном
316
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАЛАЧ
(в скалярном произведении также предполагается интеграл Лебега). Интсграл (9.3) определяст свклидову норму ||/| = |7 ||.
в этом пространстве, сходимость по которой называют сходимостью
в среднем
квадратичном.
Пример 9.2.
Рассмотрим множество Ё2(9,0) функций
{: 9 >В, определенных на измеримом множестве 9 е В", для
которых консчен интеграл Лобега,
И, = Дао
о
где с — неотрицательная измеримая на 9 функция. Это множество представляст собой гильбертово пространство функций,
интегрируемых с квадратом и весом о. Скалярное произведение в этом пространстве имеет вид
(9) = |[ ооо.
(9.4)
2
Отметим,
что
в функциональных
пространствах,
в которых
скалярное произведение вводится с помощью интеграла Лебога,
считают
равными любыс
функции
} и 9, для которых множс-
ство {т ЕЕ": } (2) 7 9(5)} есть множество (лебеговой} меры
нуль. Это гарантирует выполнение аксиомы скалярного произвсдения (и соответственно нормы), согласно которой (1, }} =0
только для нулевого элемента линейного пространства.
Пример
9.3.
Гильбертовым также являстся линсинос
пространство 1” (9) векторных функций 7: 9 > В", ОС В",
для которых конечен интеграл
=
] (1), Ге) аз.
О
Здесь (2,у) обозначает стандартное скалярное произведение
вскторов фи у т-мерного евклидова арифметического прот),
странства.
Скалярное произведение в ГЯ. (©) определяется
9.1. Операторное уравнение
317
формулой
(4.9 = ] (12), 9(®)) ат. #
[9
Если бесконсчномерное
является
полным,
то
его
нормированнос
можно
пространство
пополнить,
т.е.
построить
С не
та-
кое полное нормированное пространство д, которое включает
в себя нормированное пространство С, причем С является множеством, всюду плотным в С. Расширение нормированного
(евклидова) пространства С до полного Д называют пополнением нормированного (евклидова) пространства Г.
Пример 9.4.
Рассмотрим линейное пространство С[а,6]
функций, непрерывных на отрезкс [а,6]. Введем в этом пространстве скалярное произведение согласно формуле
[2]
г9= ] Неда аа.
(9.5)
Получим свклидово пространство [ТУ]. Однако это пространство не является полным, и потому оно не гильбертово. Действительно, рассмотрим последовательность функций
—1,
фи(т)= ‹ пх
7Ь
1575
?
о
<<
п
-,;
<
1
т’
1х1
Эта функциональная последовательность сходится на отрезке
[-1, |] поточечно к функции
—1,
-1<5<0;
1,
О0О<х<1
(те. о»,(5) — (1) при п $ со для любого #е
[-1, 1).
318
9. РОРМУЛИРОВКА
Непосредственным
ВАРИАЦИОННЫХ
вычислением
ЗАЛАЧ
убеждаемся,
что
1/пь
1
- одре
вы
1
=2 | а-парат= 2Зп
о
0
при п —> со. Значит, фи, — ф по норме, порожденной введенным
скалярным произведением.
функция
(7)
не является
Нетрудно,
непрерывной
однако,
заметить,
что
на [-—1, 1] и не станет
непрерывной, даже если ее изменить на, множестве меры нуль,
так как она имеет точку разрыва первого рода.
Линейное пространство С'|-1,1] с заданным на нем скаляр-
ным произведением представляет собой линейное многообразие
в гильбертовом пространстве Р5[-—1,1], т.е. множество, замкну-
тое относительно линейных операций, но не замкнутое в топологическом смысле, так как содержит не все свои предельные
точки (например, описанную функцию $(7)). Можно показать,
что для произвольного отрезка [а,5] множество С[а,В] всюду
плотно в Г[а,6], т.е. любая функция из Г.2[а,6] является пределом сходящейся в среднем квадратичном последовательности
непрерывных функций. Таким образом, при рассматриваемом
скалярном произведении пополнением С[а,6] является [2[4,6].
Пример 9.5. Множество С'"(9) функций, т раз нспрерывно дифференцируемых на замкнутом ограниченном множе-
стве Я с Е", относительно скалярного произведения (9.5) также
является нормированным, но не полным, пространством.
полнением этого пространства является [2(9).
3
По-
Говорят, что оператор А действует в линейном пространстве Д, если и область определения О(А), и область
значений В(А) этого оператора являются подмножествами в С.
Пусть О(А) — линейное многообразие в С. Оператор А назы-
вают линейным
оператором, если
А(си - Во) =аА(и) + ВА(%)
9.1. Операторное уравнение
319
для любых элементов и, © © 0(А) и любых чисел а, В. В частном случае, когда линейное пространство С конечномерное, а
Р(А) = 2, приведенное определение равносильно определению
линейного оператора в конечномерном пространстве
[ТУ].
В
конечномерном линсйном пространстве С любой линейный опсратор А с областью опредолсния Р(А) можно продолжить на
все линейное пространство С, т.е. построить такой оператор А
с областью определения (А) = С, который на В(А) совпадает
с А, В бесконечномерном случае это уже неверно.
Пусть А — оператор,
странстве С. Уравнение
действующий
в нормированном
про-
А(и) = Т,
где
ЕС — заданный элемент нормированного пространства,
С, называют операторным уравнением.
Пример 9.6.
Если С — конечномерное линейное пространство, а А — линсйный опсратор с областью определения
Р(А) = С, то операторное уравнение Ац = } в координатной записи в некотором базисе линейного пространства представляет
собой систему линейных алгебраических уравнений с квадратной матрицей.
Если нелинейный
оператор
А действует
в конечномерном
линейном пространстве С, то в координатной записи получаем
систему нелинейных функциональных уравнений.
Пример 9.7. Рассмотрим краевую задачу
ного дифференциального уравнения (ОДУ)
——^+си(4)
=
ЕО, |,
для обыкновен-
сЕВ,
с краевыми условиями (0) = и(1) =0. Дифференциальное уравнение этой задачи можно интерпретировать как операторное
уравнение, определяемое линейным оператором
Ац=р-и” | си.
(9.6)
320
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
В качестве области определения
этого оператора можно
брать множество С?[0,1] дважды
непрерывно дифференцируе-
вы-
мых функций, являющееся линейным многообразием в нормированном пространстве
плотным в С1|0.1].
Но
ного
уравнения
условиям.
(10,1] с нормой |||с. причем всюду
тогда найденные решения оператор-
придется
проверять
на
соответствие
краевым
Поэтому в данном случае в качестве области опреде-
ления оператора, удобнее выбрать множество
С5[0, 1] функций,
дважды непрерывно дифференцируемых на отрезке [0, 1] и удовлотворяющих краевым условиям. Так как заданные краевые
условия однородны, указанное множество являстся линсйным
многообразием в С1[0, 11.
Линейный оператор А представляет
собой частный случай
линейного дифференциального оператора, поскольку в него
входит операция дифференцирования.
Обозначив через Ме
линейный оператор умножения на, число с (т.е. Му
можем записать линейный оператор А в виде
А
м,
2
= си), мы
й
а?
где
2
общепринятое
обозначение
оператора,
двоиного
диф-
ИЯ
ферснцирования.
Пример
Пуассона
9.8.
Рассмотрим
краевую
— Ди() = (Ф),
задачу
для
уравнения
ФУ,
(9.7)
Е
5,
(9.8)
У С ®
—
с краевым условием
(в) = 9(5),
где
А
—
оператор
Лапласа
заданная
область;
1(=) — заданная функция, непрерывная в области У; 9(%) —
заданная функция, определенная на поверхности 5, ограничивающей У.
9.1. Операторное уравнение
321
Как и в предыдущем примере, мы имеем дело с линейным
дифференциальным оператором А = -А. В качестве области
определения оператора, А можно взять множество С?(У) ПС(У)
функций,
непрерывно
прерывных
на
ее
дифференцируемых
замыкании
У =У
в области
5.
У
и не-
Рассматриваемое
множество является линейным многообразием в нормированном
пространстве С(У). Однако если в качестве области определения оператора. А взять множество функций из С?(У)ПС(У),
удовлетворяющих заданным красвым условиям, то оператор тс-
ряст свойство линейности, так как при неоднородных краевых
условиях указанное множество не будет линейным многообразием. В самом деле, пусть функции и, о © С?(У) п С(У) удовлетворяют условию (9.8), т.е. (2) =5() = 9(2),
Е 5, но
их линейная комбинация ш = си + ву при произвольных значениях а, ВЕ В уже не удовлетворяет этому условию, поскольку
и (=) = («+ В)9(=),
Отмеченнос
Е 5.
обстоятельство
объясняет,
почему,
решая
по-
добныс красвыс задачи, обычно стремятся преобразовать их
так, чтобы получить однородные краевые условия.
Пример 9.9. Рассмотрим
операторным уравнением
@и(т)
ео
и краевыми
нелинейную
+4) =),
краевую
те (5)
задачу
с
(9.9)
условиями
(а) =а,
и (6) +3(и(6))=В,
а, ВЕВ,
(9.10)
в классе дважды непрерывно дифференцирусмых на [а, 6] функций. Предположим, что функция ] (5) в правой части уравнения
(9.9) и функция 9(4) в его левой части являются непрерывными
в своей области определения.
В качестве области определения
322
9. ФОРМУЛИРОВКА
ВАРИАПИОННЫХ
ЗАДАЧ
оператора, возьмем множество С’ [656]
ций и(х),
причем
рывна.
для которых
функция
3
с С?[а, 8] таких функкраевые условия (9.10),
выполняются
3(и(7))
во
втором
краевом
условии
непре-
Пусть линейный оператор А действует в гильбертовом пространстве 7{ и его область определения 2(А) является множеством,
и,
всюду
плотным
в Я.
Если
для
произвольных
элементов
Е П(А) выполнено равенство
(Ач, и) = (м, Аъ),
(9.11)
то оператор А называют симметрическим оператором.
Напомним, что в случае конечномерного свклидова пространства, оператор, удовлетворяющий соотношению (9.11}, называют самосопряжениым. Матрица самосопряженного оператора в ортонормированном базисе является симметрической.
Поэтому понятие симметрического оператора можно трактовать как обобщение понятия самосопряженного оператора в
конечномерном
евклидовом
пространстве.
Отметим,
что усло-
вие симметричности оператора в гильбертовом пространстве
зависит не только от вида этого оператора (т.е. от формулы,
которой он описан), но и от его области определения. Расширение области определения может привести к потере условия
симметричности.
Линейный оператор А называют положительным отератором”, если
(Ам. и) > 0,
Для
положительного
ие
оператора
0(А),
А
из
|ч| 50.
равенства
(Ач, и) =0
следует равенство ||ц| = 0, или и = 0.
“Обычно термин „положительный“ распространяют только на симметрические операторы, но для дальнейшего изложения удобно рассматривать эти два понятия независимо.
9.1. Операторное уравнение
323
Симметрический оператор А называют положительно
определенным оператором, если для некоторого числа, ^/ > 0
верно неравенство
(Аи, м) >? |щ]?, ие РА).
(9.12)
Положительно определенный оператор является положительным, но обратное утверждение, вообще говоря, неверно даже в
случае, когда положительный оператор одновременно является
и симметрическим.
ный
Пример 9.10.
оператор А,
ленный
Убсдимся, что линсиный дифферснциальрассмотренный в примере 9.7 и опреде-
на линейном
симметрическим.
многообразии
Действительно,
Р(А) = С2[0,1],
является
для произвольных
функций
(1), 5(=) Е СЁ[0, | последовательным интегрированием по частям с учетом краевых условий (0) = и(1) = %(0) =в(10) =0
получаем
Если считать, что областью определения рассматриваемого
оператора, А является линейное многообразие
С?[0, |, то этот
оператор уже не будет симметрическим, так как, повторяя те
324
жс
9. ФОРМУЛИРОВКА
выкладки,
ВАРИАЦИОННЫХ
ЗАДАЧ
получим
(Аи, о) = (шеи (2) фм (2){2)) |+ (и, Ао).
(9.13)
1
Отсюда заключаем,
ций них
что (Ац, 9) 7 (и, Аз) для некоторых функ-
из С?[0, 1].
При с > 0 рассматриваемый линейный оператор (с областью
определения 65, 1]) является и положительным, так как для
произвольной функции 1(1:) Е С5[0, 1| с учетом краевых условий
и(0) = (1) =0 интегрированием по частям получаем
1
[=
+
>
з
—
е
з
2
—
|
=
^^
|]
"=—_.
—и" (2) + си(т)) и(т)
=
(Аш, и)
аз =
(и ())* ат + с [26 ах =
1
= [меоаенейш?, 20. (924)
ы
В случае с > 0 равенство (Аи, и) = 0 возможно лишь при Пу
=
= 0, откуда следует, что и(5) есть нулевой элемент гильбертова,
пространства, Р2[0,1]. Если с =0, то из равенства, (Аи, и) =0
следует, что (1) = 0 в интервале (0, 1}. Значит, в этом интервалс и(5х) = С' = с0п8%, а в силу однородных красвых условий
С=0иц(1) =0.
При с > 0 оператор А является и положительно
определен-
ным, так как, согласно (9.14),
(Аи, и) > е|щр..
2
Пример 9.11. Рассмотрим линсйный оператор А = —А из
примера 9.8. Используя вторую формулу Грина
[ель —оАи) ау = [цих — Уи)
п 45,
у
У
9.1. Операторное уравнение
верную
для
любых
дважды
непрерывно
325
дифференцируемых
функций (2), (=) © С?(У), получаем
/
(Аи, и) — (и, Ао) = | (иАу-—оДи)аУ =
=
[ть
та
(9.15)
5
где У — оператор Гамильтона; п — единичный вектор внешней нормали к кусочно гладкой повертности 5, ограничивающей пространственную область У. Отметим, что Уи равно
градиенту действительной функ и, а (Уи) п = ди/дп — производной этой функции по направлению п внешней нормали к 5.
Из (9.15) следуст, что равенство (Ам, 0) = (и, А%) не выполняется для произвольных функций и и $, т.е. оператор А = -А
с областью определения С?(У) п С(У) не является симметричсским. Но ссли ограничить действие оператора только на
функции, удовлетворяющие однородным краевым условиям, положив в (9.8) 9(2) =0 на 5, то интеграл в правой части (9.15)
обратится в нуль, а оператор А станет симметрическим.
Согласно
первой формуле Грина
] о(Уи)та8 = | (оЛи+Уиу
5
ау,
у
находим
(Ам, и) = = [ «ма
у
= - [«идтая+
Е
| (Фиау.
(9.16)
у
Видим, что при однородных красвых условиях (т.е. при 9(%)} =
= 0} оператор А будет положительным, если его действие
ограничить на функции и Е С?(У) пС(У), удовлетворяющие
этим красвым условиям. Действительно, в этом случас, соглас-
но (9.16),
(Аш, и) = урау
У
>20.
326
9. РОРМУЛИРОВКА
Из равенства
(Ач, и) =0
ВАРИАЦИОННЫХ
следует равенство
ЗАЛАЧ
Уи = 0.
Но тогда
и = с0186, а с учетом однородных краевых условий и =0. Можно
показать,
что при однородных
краевых
условиях
оператор
А
будет и положительно определенным [ХПИ
Однако оператор А не является положительным, а значит, и положительно определенным, если в качестве его области определения рассматривать все линейное многообразие
С(У)ПС(У). Оказывается, что в этом случае существуют такие функции и, для которых поверхностный интеграл в правой
части (9.16) больше тройного интеграла.
Гассмотрим операторное уравнение Ам = Х, для которого
оператор А является линейным.
Теорема
9.1.
Если оператор
А, действующий
в гильбер-
товом пространстве #, является положительным, а уравнение
Аи = $ имеет решение, то это решение единственное.
< Пусть одновременно
Аи: =
фи Ачи2 = }.
Тогда,
обозначив
и = и! — м2, получим
Ди = А(иш1 — 2) = Ам
— Аи
=} -}=0.
Следовательно, (Ач, 4) = (0, м) =0. В силу положительности
оператора, А заключаем, что и = 0 и ци! = и2. Таким образом,
любые два решения уравнения Аи = } совпадают. №
Теорема
ле).
Если
9.2 (теорема
А —
областью определения О(А),
ния
о квадратичном
симметрический
Ам = }, то это решение
квадратичному
а ше
положительный
(А)
доставляет
функционаоператор
— решение уравненаименьшее
значение
функционалу
и]
= (Ам, и) —2(и, 7).
Наоборот, если элемент 0 Е Д(А) доставляет наименьшее зна-
чение функционалу
уравнения Аи = }.
/[и], то этот элемент является решением
с
9.1. Операторное уравнение
< Пусть Ач
327
= Х. Тогда для любого элемента и е 2(А)
7 [ч] = (Ач, и) -2(}, и) = (Ач, и) -2(Ащ, и) +
+ (Амо, чо) — (Ао, що) = (А(и — що), и — що) —
—
(Ао,
0)
=
(Ач, 14) —
(Амо,
0)
,
(9.17)
где & =и-— шо.
Видно, что функционал достигает своего
наименьшего значения „/[щ] = — (Ацо, чо) при (Ай, и) =0, т.е.
при и =щЕе Б(А).
Пусть теперь элемент ис Е О(А) доставляет наименьшее
значение
АиЕ (А)
функционалу
Л[ц|.
Выберем
так, чтобы и = щ +Аце
произвольный
элемент
О(А). Тогда
м] — Ли] = що + Аи] — що] =
= (А(щ + Ам),
ш-+ Ди) —2(1,
ш-+ Аи) — (Ащд, мо) +
+2 (Х, чо) = (ААДц, Аи) +2(Ащ
- }, Аи) 20.
Записанное неравенство верно для любого элемента Ам. Выбрав Ам = #,, где элемент © © Р(А) фиксирован, а {Е В прини-
мает произвольные значения, получим
Р? (Аз, 5) +2 (Ащ-
{, 5) 20,
1ЕЕ.
Но это неравенство верно для любого # Е В только в том случае,
когда (Ащ—), 5) =0. Так как элемент © Е Б(А) произволен,
то заключаем, что Ач
— } = 0, или Ацу = }. №
Теорема о квадратичном функционале устанавливает связь
между операторным уравнением и некоторой вариационной задачей.
Вместо того чтобы решать операторное уравнение,
можно искать наименьшее значение соответствующего функционала.
Однако недостаток указанной теоремы состоит в
том, что далеко не всегда удается поставить математическую
задачу так, чтобы это было операторное уравнение с симметрическим положительным оператором. Круг таких задач
328
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
весьма ограничен. Поэтому важно установить и другие условия, при которых возможен персход от операторного уравнения
к поиску
наименышего
значения
соотвстствующего
функцио-
нала и которые не содержат требования симметричности или
положительности оператора. Если прикладная задача, сводящаяся к решению операторного уравнения, допускает указанный переход к некоторой вариационной задаче,
мы будем называть
ной прикладной
вариационной
то последнюю
формулировкой
исход-
задачи.
9.2. Вариационное
уравнение
Вернемся к операторному уравнению Ами = } с оператором
А, действующим в гильбертовом пространстве 7. Допустим,
что область определения Г(А) этого оператора ссть всюду
плотное множество в |. Рассмотрим уравнение вида,
Е(и, би) = 0,
определяемое
некоторым
(9.18)
функционалом
Р[и,би]
с областью
определения Р(Р) = Дих Пи, где Р(А) ср, с#, Ри СЯ. Если это уравнение эквивалентно операторному уравнению Ам =
= Х, то его называют вариационным уравнением, соответствующим этому операторному уравнению. Условие равносильности уравнений Аи =} и Р(и,ди) =0 означает, что любое
решение операторного уравнения удовлетворяет вариационному уравнению при любой вариации ди Е Оз, а любой элемент
цЕ (А), превращающий вариационное уравнение в тождество,
есть решение операторного уравнения.
Вариационное уравнение называют голономным, если его
левая
часть
является
первой
вариацией
9./[и, ды]
некоторого
функционала, /[м] с областью определения Ш (./) = РО. Если такой функционал /[м| удается найти, то операторное уравнение
Аи = } будет равносильно
уравнению
9/и,би]
= 0, т.е. реше-
ние операторного уравнения равносильно поиску стационарных
9.2. Вариационное уравнение
329
точек функционала /[и]. Таким образом, переход к вариационной формулировке прикладной задачи может быть реализован
построснисм голономного вариационного уравнсния.
В некоторых ситуациях голономнос вариационнос уравнсние, эквивалентное операторному, построить не удается, но
можно построить такое вариационное уравнение, которое среди своих решений содержит все решения операторного уравнения.
Тогда, решив такое вариационное уравнснис, нужно
выделить среди найденных решений те, которые имеют отношение к операторному уравнению.
В качестве вариационного уравнения, соответствующего
операторному уравнению Ам = р, можно взять следующее:
(Аи— 7, 0и) =0,
дбиЕБы с Н,
(9.19)
где Оу, всюду плотно в гильбертовом пространстве 7{. Нетрудно убедиться, что все решения операторного уравнения
удовлетворяют
уравнению
(9.19).
Верно
и обратное.
Если
для заданного элемента, м Е О(А) равенство (9.19) выполняется
для всех элементов ди из всюду плотного в 71 множества, то
Аи} =0 [ПХ |, т.с. в этом случас и являстся решенисм операторного уравнения А = {.
Выясним, при каких условиях вариационное уравнение (9.19),
соответствующее линейному оператору А, является голономным, т.е. его левая часть представляет собой первую вариацию
некоторого функционала /[ч|. Сначала разберемся, как ответ
на этот вопрос выглядит в конечномерном случае. Пусть А —
линейный оператор в М№-мерном евклидовом пространстве &.
В некотором ортонормированном базисе действие этого оператора сводится к умножению столбца координат 1, и, .... им
вектора и на некоторую квадратную матрицу А = (а,;), а уравнение (9.19) можно записать следующим образом:
м
у`
&=1
м
з
9=1
аки;
—
л)
би
—
0.
(9.20)
330
9. ФОРМУЛИРОВКА
ВАРИАПИОННЫХ
ЗАДАЧ
В данном случае вариационное уравнение голономное тогда и
только тогда, когда левая часть этого уравнения представляет
собой полный
дифференциал некоторой функции
многих переменных.
„/(и1,.... им)
Поэтому
вым) роны); висте
м
=1
или
арт = @тк,
ЮтТЕТ
М.
Итак, условие голономности вариапионного уравнения (9.19)
равносильно условию, что матрипа оператора А в ортонормированном базисе симметрическая.
Но последнее значит, что
оператор А является самосопряженным.
Нетрудно показать,
что в случае самосопряженного оператора А в качестве функ-
ционала „/ можно взять /(и) = р (Ач, и) - (и, Г).
Персидем к босконсчномерному случаю. Естественно прсдположить, что в гильбертовом пространстве голономность вариационного уравнения для линейного оператора также связана,
с условисм симмстричности этого оператора. Убедимся в этом.
Предположим, что для заданного линейного оператора А в
гильбертовом пространстве 7[, имеющего всюду плотную в #
область определения О(А), существует функционал /[и], для
которого 9.Ли,би]|= (Ац— }, ды). Выбрав произвольные функции В,
Е П(А), рассмотрим функцию
р(а,в) = Ди+ав-+69],
а,ВЕЕ.
(9.21)
Тогда
- $
8)
вы +49Да
2 (а. в) = Ао0
=
.
Ш
да>0
Ум
В) _
(а-Аоь + 99] - Ли+ой-89]
Аа
=
=д.Ли
+ оВ + В9, В] = (А(и+ов+
В9) — 1, В) =
= (А(и+ай) - Л, В) В(Ав, В).
(9.22)
9.2. Вариационное уравнение
Мы
видим,
что функция
331
(а, В) дифференцируема по параме-
труВи
Фов (с, В) — (29, в) .
Аналогично можно показать, что существует вторая смешанная
производная
Две
р! (а,В) = (Ап, 9).
смешанные
производные
ф/з
и Ф/,
существуют
и непре-
рывны (они попросту постоянны).
Поэтому они равны, т.е.
Физ = Фра. Следовательно, для любых функций В, 9 Е О(А) выполняется равенство
(Ад, В) = (АВ, 9) = (9, АВ),
т.е. оператор
А, имеющий
всюду
плотную
в 7{ область
опре-
деления, является симметрическим. Нетрудно показать, что
если оператор А симметрический, то левая часть вариационного
уравнения
(9.19)
представляет
собой
первую
вариацию
функционала, /[м] = 1 (Ач, и) — (Г, и). Действительно,
р
Ли
+ ви] — Лм = 5 (А(ы+1би), и + би) —
ии)5 (ди, + (ри) =
= 5 (лм, би) ++ (Ади, и) + (Ади, би) Иди) =
= (Аи ррбиь+ (Ади, би)
откуда д.Л[и, ди] = (Аи — Ё, ди).
Замечание 9.1.
Мы рассмотрели случай операторного
уравнения Аи = } с линейным оператором А. Однако вариа-
ционное уравнение (9.19) можно использовать и в нелинейном
случае, но условия голономности вариационного уравнения в нелинейном случае более сложные, а, восстановление функционала
по голономному
уравнению
требует
значительных
усилий.
332
9. РОРМУЛИРОВКА
9.3. Примеры
ВАРИАЦИОННЫХ
построения
по вариационному
В 9.2 показано,
что
и [м
(Ам,
и)
функционала
уравнению
квадрапигиньй
=
ЗАЛАЧ
— 2($,
функционал
и),
вида
(9.23)
соответствующий операторному уравнению Ам = $, где оператор А действует в гильбертовом пространстве 71|, можно
построить в случае, когда оператор А симметрический. Если этот оператор положительный и уравнение Ам = } имеет
решение
му 9.1).
0 Е 2(А), то это решение единственное (см. теореЕсли же оператор А и симметрический и положи-
тельный и уравнение Аи = { имеет решение чо, то, согласно
теореме 9.2, функционал „Л,[и] (9.23) достигает на этом решении свосго наимсньшсго значения „Л, [0] = — (Амо, чо).
Из примеров 9.10 и 9.11 видно, что симметричность и поло-
жительность оператора. рассматриваемого на множестве функций, удовлетворяющих
краевым условиям конкретной краевой
задачи, существенным образом зависит от вида этих условий.
В краевых задачах прикладного характера эти условия обычно
неоднородны, и поэтому на таком множестве функций свойства,
симметричности и положительности оператора утрачиваются.
Тем не менее и в такой ситуации в некоторых случаях можно
построить функционал, соответствующий операторному уравнению красвой задачи, если использовать вариапионнос уравнение, равносильное этому операторному уравнению. Поясним
эту процедуру на конкретных примерах.
Пример 9.12. Рассмотрим красвую задачу для обыкновснного дифференциального уравнения
4 и(т)
р
+02) =),
#6 0,1,
(9.24)
9.3.
с
красвыми
Примеры построения функционала
333
условиями
и (0) — аи(0) =а,
гдес, о, а, В, ВЕВ; / (2)
и(1) + Ви(1) = В,
(9.25)
ЕСО, 1.
Как и в примере 9.10, можно показать, что в случае однородных краевых условий (а = В = 0) линейный оператор
А = 4
+ М.,
действующий
в гильбертовом
пространстве
12[0,1], будет симметрическим, если в качестве его области
определения взять всюду плотнос в Г2[0,1] множество дважды
непрерывно
дифференцируемых
таким краевым условиям.
функций,
удовлетворяющих
Действительно,
для произвольных
функций и, ое С?[0, 1], удовлетворяющих (9.25), последователь-
ным интегрированием по частям получаем
1
(Аши) = | (-и(2) + еще)
ув (в) в =
= (и(х)о' (2) (в)
=
(2)
+ (м, Ао) =
(В- 85) — ®(0 (В - Ви) -
— и(0) (@ + 5 (0)} + %(0) (& + аи(0)) + (и, Аъ) =
= В(ы(1) — ®(1)) - @ (4 (0) — 5(0)) + (м, А).
"Таким образом, при однородных краевых условиях (&@ = В =
= 0) оператор А является симметрическим: (Ач, 5) = (и, Ау).
Но в общем случас этот оператор перестает быть симметричсским (он даже не является линейным).
Построим в рассматриваемом случае вариационное уравнение
(Аи-}, ди) =0
оператора в (9.24),
вида
(9.19).
Учитывая
выражение
для
получаем
1
(Ац-Т,ди) = [о
о
+ си(=2) — {(=)) дби(®) аз =0.
(9.26)
334
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
Интегрируем по частям и учитываем краевые условия (9.25):
1
(бб
1
+ [оби
о
оаь+ [ (еще) — Под)ащедщь=
|
1
= —(8- Ви(1))би(1) + (@ + аи (0)
би (0)
"Г
+
+ (са
'(т)би (в) ат +
)} би(2) ат.
(9.27)
0
Учитывая общий вид первой вариации функционала интегрального вида (3.3), можем записать:
г
р
й }у?
“
1
ша
и’ (жби ()ат,
|
це СТО, 1,
(9.28)
/
1
- ] (си(2)— (2) биг),
ие ОТ.
(9.29)
0
Для терминального функционала Т[и] = и? (а) (а фиксировано)
непосредственным подсчетом находим
АТ] =Ти- ди -Т[| =
= ((а)
+ би(а))* — и? (а) = 2(а)би(а)
+ (би(а)),
откуда,
Ги, ди] = ж(а)ди(а).
(9.30)
9.3.
Примеры построения функционала
335
Приведенные представления первых вариаций функционалов показывают, что правую часть (9.27) можно представить в
видс
Ви
(Аи Г, ди) = (ан) — Виа) + о
+
Е
уз
Видно, что это выражение является первой вариацией функционала,
1
Ли] = &ц(0} — Ви) +
и? (0) - Ви 5+
[ (© + си — Ги) 4х.
0
В качестве области определения О(.7) функционала „/[и| можно
взять 0(.7)
= С", 1]. Из (9.26) следует, что каждое решение
рассматриваемой краевой задачи является стационарной точвой этого
функционала.
Аналогично
можно
построить функционал
1 _ ар(а)ща) _ Вр(®)и(Ь) _ оха)и? (а) _ Выуи?6)
Ла =
©
8
ы
201
ы
281
р
р
2) (ч
5
— ауще)) 4®
с областью
определения
О(.Л) = Са, ], стационарной
+
.
(9.31)
точкой
которого является решение краевой задачи для операторного
уравнения
ое
+ еды) = од, ей,
ат
= 059
с краевыми условиями
он (а) — ощ(а) =а,
Вии’(6) + Ви) = В,
(9.33)
336
где
9. ФОРМУЛИРОВКА
с, и Е Са,
Ы;
ре
Са,
ВАРИАЦИОННЫХ
ИВ
р(а)р (о) я 0;
сб #0.
Убедимся в этом
представления (9.28)—(9.30),
ЗАДАЧ
с’, аа, а, 8, 81, В ЕЕ;
следующим образом.
Используя
находим вариацию функционала,
(9.31):
би,
би]
—
+
—_ К
и
.
.
6
+ [седща) — /(4)) ди(т) ах.
а
Первый интеграл в правой части этого равенства, преобразуем
интегрированием по частям:
6
6
обои
(а) би (т) 4х = р(туи (т) бит) . — ] (р(гум (+)
а
би (+) 4х
а
и после подстановки преобразованного интеграла в выражение
для 9.Ли, ди] получим
д.Ли, ди] = обще) _ Ви)
о
аа)
6
— [обоз
В
+ [Се
о
+ р(хуи (т) дит) „—
|
бибодат+ | (федща)
а + ака геи а);
ь
би)
ща) — Ви(Ъ)
[ео
= р(а)
|
В
це) ов
= Ра) ща =
В — ни)
У’ не(е)и (2)— о) биз).
би(Ь)
(934)
9.3.
Примеры построения функционала
Если некоторая функция 0 (1) Е С?[а,
337
является решением
краевой задачи (9.32), (9.33), то эта функция обращает правую
часть (9.34) в нуль, т.е. будет стационарной точкой функцио-
нала (9.31).
Пример
Пуассона
9.13.
Рассмотрим краевую задачу для уравнения
— Ди(т) = (т),
жЕУ,
(9.35)
где У Е ЕЗ — пространственная область, ограниченная кусочно
гладкой поверхностью 5; ]1(%) Е С(У) (см. примеры 9.8 и
9.11).
Краевые условия задачи определим следующим образом.
На участках 9,
функции (52):
поверхности
(2) ==),
5 известны
значения
268,
искомой
(9.36)
а, на остальных участках 5 = 5 \ 59 краевое условие имеет вид
Уи(т)п(т)
от)
= В(х),
ЖЕ5,,
аЕВ,
(9.37)
где У — оператор Гамильтона, а п(®) — единичный вектор
внешней нормали к поверхности 5 в точке ж. Предполагасм,
что 9(5) Е С(59) и (=) Е С(%,).
Рассмотрим линейный дифференциальный оператор А=-—А,
область определения (А) которого состоит из функций и(2)
линейного многообразия Су = С?(У) ПС(Уц5,)
ПОЦУ ц5,,),
удовлетворяющих краевым условиям (9.36) и (9.37). Область
определения оператора всюду плотна в гильбертовом пространствс Ё2(У), а ссли 9 и В тождественно равны нулю, являстся
линсйным многообразием в Г2(У). В этом случас оператор А
является симметрическим.
Действительно, при д =0ий=0
оператор А линейный. Кроме того, для произвольных функций ии
1 из области определения оператора, используя равен-
338
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАЛАЧ
ство (9.15), получаем
(Аи, 5)
|
(и, Аз) = | (иДь-оДи) АУ = |
[
(иУи-—зУи)па$ =
= Дать — Уи)п
45 - ] В(и- о) 45 =0.
59
5
В общем случае для вариационного уравнения, соотвстствующего заданной краевой задаче, имссм
(Аи би) — [(сли- Эва
0
(9.38)
Используя первую формулу Грина и красвыс условия и учитывая
представления
[9
ау = [ууу
[=
У
45= [ная
(9.39)
5»
аналогичные (9.28), (9.29), находим
[сли -
ду
= =
бетон
[учуфы ау —
и
>
зиму
=
и
[беби
бь:
=5 | ( вая
[ыы )4у - в [лу
У
(9
-в)ау=0. (9.40)
5%
Обратим внимание на то, что поверхностный интеграл на,
участках 5, поверхности 5 исчезает, поскольку на бу заданы
значения искомой функции и, следовательно, ди =0
на 5у.
Кроме того, мы использовали и краевое условие (9.37).
9.3. Нримеры построения функционала
Предпоследняя
часть равенства
339
(9.40) является вариацией
функционала
.
2
Иа = ] (9 р у + ] (5- — ви) 45.
У
(9.41)
5ъ
В качестве области определения этого функционала можно
взять линсинос многообразие С\(У) ПС(У Ц 5), всюду плотное
в Г2(У).
Согласно
проведенным
выкладкам,
первая вариация
этого функционала на множестве О(А) совпадает с (Аи — }, ди).
Аналогично можно построить функционал
ли=
| (&°5
к,
о)ау+ [> (4
и
ль) 48
(9.42)
5ь
с областью определения Р(.Т)
= СЦУ)пС(УЦ5),
соответству-
ющий операторному уравнению
—У(&(2)Уц(=)) = (=),
тЕУ,
(9.43)
с краевыми условиями
м
=9(=),
25,
01 (2) Уи(2) п(т) + а (т) щих) =1(%),
где
Е С(У);
КЕСЦУ)ПС(5»);
ЕО
Е5ь,
на бь: а,
(9.44)
ВЕ С(5,):
от 2 0 на 5».
Убедимся в том, что вариация функционала /У[н] в области
определения Р(А) оператора А, состоящей из функций линейного многообразия Су, удовлетворяющих краевым условиям
(9.44), совпадает с выражением (Аи -— }, ди). Для этого вычислим вариацию функционала, учитывая представления (9.39):
б.Л[и, ди] =
[куибхиау
й
— ее
|,А (аи—
В) би 45.
5ь
о
340
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
Первый интеграл в правой части этого равенства преобразуем
с помощью формулы Остроградского — Гаусса:
[ох б\УиаУ = [ КУиУ (би) аУ =
м
у
= [+ Уипдиа5 — Гуин
5
ди.
у
Подставляя преобразованный интеграл в выражение для 9./[и,д%]
и учитывая, что ди = 0 на 5,, находим
б.Л[и, ди] = ьутбиая
— | 9Уч) биаУ —
5
У
= [лвиау + [|
у
5»
дам
в)виав
1
= — | (уе)
+) би У +
у
+ | ие
Н
Унп
аи -#)биа5.
(9.45)
5
Проведенные выкладки показывают, что первая вариация этого функционала на множестве О(А) совпадает с (Аиди).
Если некоторая
функция
0
является
решением
краевой задачи
(9.43), (9.44), то правая часть (9.45) обращается в нуль, т.е. эта
функция будет стационарной точкой функционала (9.42).
Пример 9.14. Попытаемся для краевой задачи (9.9). (9.10)
построить по вариационному уравнению (9.19) функционал,
соответствующий операторному уравнению этой задачи. Ва:
риационное уравнение (9.19) в данном случае имеет вид
ь
] (—ч" (=) +а(и) — 1(+)) би)аз =0.
(9.46)
9.3. Примеры построения функционала
341
Левую часть (9.46) представим суммой двух интегралов:
ь
ь
- [ед
+7)
би(х Эче+
а
Для
| абдбщеаь
=0,
(9.47)
а
первого
интеграла
в (9.47),
так
же
как
принимая во внимание то, что 9%(а) =0,
краевое условие (9.10), находим
в примере
и учитывая
9.12,
второе
ь
=
+ 1(х
(+) ди()
- | (2) (би (т), 42ь
+
4 = —и (т)бщх)
| Педбщедаь=
= (9
(4)
ь
[чув
адая-
+
и (в)
| (аще)
ве
[Ви
[
бчь)
+
о
=
(ее
-
ед)
4х.
(9.48)
Второй интеграл в (9.47) представим в виде
]
ь
в
“|
щ2)
4(и)бч(т)
ах =д | ах |
В итоге из (9.47)
(и) 4.
(9.49)
(9.49) получаем
и (5)
(ыо-
[омм)
—6[ Ви - | (и)аи] +
ь
+5 [| ("5
(1)
— 1 (=) одне
[в
[вы )4и=0
342
9. РОРМУЛИРОВКА
ВАРИАЦИОННЫХ
ЗАДАЧ
Лсвая часть этого равенства ссть первая вариация функционала,
6
ь
Ди] = -Ви(5)+ ] ме,
+
] (аи()
ас +
р
(т)
(6)
[4
] 4(и) аи + ] 8(и)4и,
(9.50)
0
в
0
в качестве области определения 2)(.Л) которого возьмем линейнос многообразие С" [а, 8]. На множестве функций и(т) из О(.Т),
удовлетворяющих краевому условию и(а) = а, вариация функ-
ционала совпадает
с левой частью
(Аи }, би) вариационного
уравнения.
9.4. Исследование
выпуклости
функционала
Лля каждого из построенных в примерах 9.12 9.14 фунжционалов пока удалось лишь установить, что если соответствующая ему краевая задача имеет решение, то это решение
является стационарной точкой этого функционала. Естественно, возникают вопросы: будет ли у такого функционала эта,
точка единственной и будет ли в этой точке функционал достигать
наименьшего
или
наибольшего
значения?
Ответы
на
эти
вопросы можно получить путем проверки свойства выпуклости
функционала.
Подмножество М линейного пространства С называют
выпуклым множеством, если для любых элементов и, Е М
и любого числа, о Е [0, 1] элемент очи - (1 — ©}® также принадлсжит М. Простейшим примером выпуклого множества, является
само линейное пространство С, а также любое его линейное
многообразие.
Функционал [м], определенный на выпуклом
множестве М = 2(.), называют выпуклым функционалом,
если для любых 1, из Е Миое
„Лои1
+
(1-в)и2]
[0,1]
<оЛи-
1-о)Ли-]|.
(9.51)
9.4. Исследование выпуклости функционала
Если при любых м1 52 и2 исЕ
343
(0, 1) в (9.51) выполнено строгое
неравенство, т.е.
В(ил м2) =оЛил|+ (1-в)/[м2|- Ло
+ (1-©)и2]>0,
(9.52)
то функционал /[и| называют строго выпуклым функционалом. Отметим, что в линейном пространстве В! понятие
функционала, сводится к понятию действительной функции одного действительного переменного.
В этом случае понятие
выпуклого (строго выпуклого} функционала равнозначно понятию выпуклой вниз (строго выпуклой вниз) функции [1].
Пример 9.15. Выпуклым функционалом является линейный функционал. В нормированном пространстве Л/ выпуклым
функционалом
треугольника
является
норма
|||,
так как из неравенства
следует, что
По + (1—0) < [0% + (1 о) |=
=0 || + (1—9)|
Взяв неубывающую
строго выпуклую
‚
вниз функцию
5 ЕМ.
}(7) дей-
ствительного х (например, /(2) = 22), получим строго выпуклый функционал
[м] = } (|ц
||). Дсйствительно,
(очи + (1—0)||) < (ош
1-0) |||) <
<о/ (м) + (фо) (|
2
),
щие
л/.
о
В частности, ||м|
строго выпуклый функционал в нормированном пространстве.
Замечание
9.2.
Непосредственно
из определений
выте-
кает, что сумма выпуклых функционалов является выпуклым
функционалом, а сумма выпуклого и строго выпуклого функционалов является строго выпуклым функционалом. В частности,
если Р[и] — линейный функционал и функционалы /[и] и Л [мц]
связаны соотношением [м] = Л [м] + Е[и|, то они выпуклые
344
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ
(строго выпуклые) одновременно.
ЗАДАЧ
Это означает, что при иссле-
довании функционала,
[м] на выпуклость в его представлении
можно опускать линейные относительно элемента, и слагаемые.
Например,
квадратичный
функционал
Ли] = (Аи, и) -2(}, и)
будет выпуклым (строго выпуклым) тогда и только тогда, когда выпуклым (строго выпуклым) является функционал .]2 [и] =
= (Ам, м).
Пример 9.16. Выясним, при каких условиях функционал
2 [м] = (Аи, и), построенный по линейному оператору А, будет
строго выпуклым. Для этого необходимо проверить неравенство (9.52). Для произвольных элементов и, фе 0(А) имеем
В (ил,
ч>)
=
(Аш,
м1)
+
(1—о)
— (А(оил
+ (1 — о)и2),
с)
(( (Аи,
м1)
+
(Аир,
(Амо,
м2)
—
вил + (1- виз)
и2)—
(Аш,
=0(1-0)}
м2)
(Аи
=
—
(Аи,
—
2),
щ))
1
=
— 12).
Так как 0(1-с) > 0 присЕ
(0, 1), заключаем, что функционал
72 [и] = (Ац, и) будст строго выпуклым, ссли А — положительный
оператор.
Выпуклые функционалы имеют несколько важных свойств.
Свойство 9.1.
Ограничение выпуклого (строго выпуклого) функционала на, выпуклое множество является выпуклым
(строго выпуклым) функционалом.
< Пусть м] — выпуклый функционали М с (7) — выпуклое
множество. Тогда функционал Ум[ч|, определенный на множестве М и совпадающий на этом множестве с функционалом
Л] (т.е. Ум[ч] есть ограничение /[м] на М), будет выпуклым
функционалом.
Действительно,
для любых
элементов
и,
Е М
и любого сЕ
(0,1) элемент оц + (1—0) принадлежит М и
при этом, в силу выпуклости функционала, /[м|, верно неравенство (9.51). А это и значит, что функционал /м [ци] выпуклый.
9.4. Исследование выпуклости функционала
Рассуждения
в
случае
строго
выпуклого
345
функционала,
анало-
гичны.
Свойство 9.2. Если функционал /Л[м выпуклый (строго
выпуклый), то прис 20 (с > 0) функционал с/[и] тоже выпуклый (строго выпуклый).
< Свойство выпуклости функционала, ./[и| означает выполнение
неравенства (9.51). Умножив это неравенство на с, получим
утверждение о выпуклости функционала с/[ч]. В случае строго
выпуклого
функционала, рассуждения
аналогичны.
№
Свойство 9.3.
Если Ли] — выпуклый функционал, &
{(+) — выпуклая (вниз) нсубывающая функция действительного переменного т, определенная на всей числовой оси, то
композиция }(./[м])
выпуклый функционал.
В частности,
если Ли]
ционал.
линейный функционал, то 72[и]
< Для выпуклой функции при любых х,
выпуклый функ-
уЕВиое
(0, 1} верно
неравенство
К(от + (1-0)у) <о1(=) + 1 -о)4 (у).
Рассматривая в качестве 5 и у значения функционала, получаем
(Ло
+ (1 -о)и2]) < (о Ли] + (1-в) Лир]
<
«ош +9),
где 1, 2 ЕО(Л): сЕ (0,1).
Если Ли] — линейный функционал, то |/м]| — выпуклый
функционал,
так как
|Лоши + (1-с)м2]| = |о.Ди + (1-в).Лм?]| <
<о Ли || + (1-0)
где 1, м2
функцию
Е О(.Л), сЕ
(т),
равную
ем, что функционал
(0.1).
Выбрав
выпуклую
[и2]|,
неубывающую
1? при т 2 0 и нулю при х < 0, заключа-
[и] = }(|.Л[м]|) является выпуклым.
346
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ ЗАДАЧ
Свойство 9.4. Непрерывный выпуклый (в частности, непрерывный строго выпуклый) функционал /[и] достигает наи-
меньшего значения на любом замкнутом ограниченном множестве в гильбертовом пространстве 7{. Если /[и] + +0 при
|“| > со, то выпуклый функционал /[м| достигает наименьшего значения на любом замкнутом в 7{ множестве”.
3
Свойство 9.5. Если строго выпуклый функционал [и]
достигает на выпуклом множестве М своего наименьшего значения .Л,, то элемент и„, на котором достигается это значение,
единственный.
ч Пусть Ли1|= Л. = Лм?|.
получаем
1
В(и1,
м2)
=
5
Тогда,
полагая о = 1/2 в (9.52),
1
и]
+
5]
—
1
1
5+5
=.
| 1 +2
2 ]>0,
т.е. (и, +и2)/2] < 1», а это противоречит тому, что Л. является наименьшим значением функционала на, множестве М. +
Свойство 9.6. Если строго выпуклый функционал / [м], у
которого всюду в области определения существует дифференци-
ал Гато, имеет стационарную точку, то эта точка, единственная и в ней функционал достигает наименьшего значения.
< Покажем, что стационарная точка, строго выпуклого
ционала является его точкой минимума. Тогда, согласно
ству 9.5, эта точка, является единственной.
Пусть ще О(.7) — стационарная точка функционала,
Выберем произвольную точку ие 0(.7). Тогда, согласно
функсвой„/[и].
свой-
ству строгой выпуклости функционала /|[и|, для любого числа
ое (0, 1)
ом] + (1—-с)Л що] > Лечи + (1-о)и].
“См.
Экланд
И., Темам
Р.
9.4. Исследование выпуклости функционала
Вычитая
из обеих частей неравенства [0]
ЗА
и деля на о’, полу-
чаем
- Лш]> Ло
Ли
Ли] _ мо + оби] — Ли]
+ (1-в)щ— о]
[2
[2
)
где ди =и—10. Так как функционал /[и| имеет дифференциал
Галто, то существует предел
И
Лис - оби] — мц]
о—>-+0
[д
= 9. [чо
, ды].
Этот предел равен нулю, потому что 0 — стационарная точка.
Но тогда
[мо + оби] — Ли]
@—>-0
=0,
[д
т.с. [м] > Ли и, в силу произвольного выбора и е 2(А), мо
являстся точкой минимума функционала „Л[и].
Пример 9.17. Выясним, при каких условиях функционал
Л[ч], определяемый соотношением (9.31), является выпуклым.
Область определения 2(.7) = С(а,6] этого функционала, является линейным многообразием, т.е. представляет собой выпуклое
множество. Согласно замечанию 9.2, линейные слагаемые можно опустить, поскольку они не влияют на выпуклость функционала. Функционал будет выпуклым, если каждое из оставшихся
слагаемых определяет выпуклый функционал на 0(./).
При
этом, если одно из этих слагаемых определяет строго выпуклый
функционал, то и функционал „Л[и| является строго выпуклым.
Интеграл
| стихи(х) ах
[о
в случае с(5) > 0, хе
[а, 8], можно трактовать как скалярное
произведение функций и(т} и 5(т) в линейном пространстве
348
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ ЗАДАЧ
Са, 8]. Поэтому слагасмос
в (9.31) справа определяет строго выпуклый функционал как
половина квадрата нормы (см. пример 9.15 и свойство 9.2).
Слагаемое
при р(5) > 0, тЕ
[а, 8], определяет
скольку для любых функций
се (0,1) ин =1- о имеем
выпуклый
функционал,
и(т), 9(1) © СЦа,]
по-
и любого
6
В(и,ъ) уе
ох % ( оушни
| (т ) ('(2))* аз —
Ь
- [о
(зу
ие (< -))* ат= от [ (2) (м (2) -ч' (=)
а
>20.
а
Отметим, что при построении функционала было использовано условие р(а)р(6) 20 (см. пример 9.12), что вместе с условием неотрицательности функции р(7) дает р(а) > 0ир(5) > 0.
Поэтому слагаемые
ар(а)чи? (а)
201
Вр(в)и? (6)
;
28:
определяют выпуклые функционалы, если а/с 20и 9/81 >20
Это вытекает из свойств 9.2 и 9.3.
Итак, если р(т) 20 при гЕ [а,6]|, с(2) >0 при те [а, 6],
р(а)рь 70, а/с 20, В/В! 20, то функционал (9.31) строго
выпуклый.
9.4. Исследование выпуклости функционала
Пример
Л]
9.18.
349
При исследовании выпуклости функционала,
(9.42), область определения которого 0(.7) = СЦи)пС(У)
сеть выпуклос множество, можно не рассматривать линейные
слагаемые. Этот функционал является выпуклым, если слагаемые
12 ] (=) (Уи? ау.
12] [ @11)(2) (и? 9
у
5»
определяют выпуклые функционалы.
Можно показать, что
достаточным условием выпуклости первого из них является
неотрицательность
функции
(т)
в У,
те.
^(5) 20,
тЕУ.
Предполагая, что эта функция непрерывна, заключаем, что она
неотрицательна, и на гранипе области и, в частности, А(52) > 0,
хе 5». С учетом этого нетрудно показать, что выпуклость
второго функционала, определяемого интегралом по 5», будет
следовать из соотношения @(2)/о1 (2) >20,
Е 5).
Итак, рассматриваемый функционал выпуклый при &(®) >0,
ЖЕ,
и а(т)/он(2) 20,
К(%) >0,
же 5,.
ЕМУ, то функционал
Можно
показалъ,
что если
(9.42) является строго выпук-
лым.
Пример
9.19.
Функционал
(9.50)
будет
выпуклым,
если
выпуклы функционалы
ь
[
а
и (2)
и(Ь)
[0 (9),
] 5(6) 46,
поскольку
первое
линейные
и не влияют
и третье
(9.53)
0
слагаемые
на выпуклость
в правой
части
функционала
(9.50)
Ли],
а
второе слагаемое определяет выпуклый функционал.
Обозначив через (9(7) и 5(52) первообразные функций 4(#)
и 3(1), принимающие значение () в точке 5 = 0, можем записать
и (т)
и)
[= | 4х ] Ч(Е)Е= | @(и(=))аз, ша ] 8(Е)4Е=5(и(5)).
0
0
350
9. ФОРМУЛИРОВКА
Выпуклость
ства,
функционала
ВАРИАЦИОННЫХ
/.[м] означаст выполнение
5 (ош (6) + ши (5)) < 05 (ил (6)) + и
где 1 (2), и2(1) Е С'[а,6]; сЕ
ЗАЛАЧ
(0, 1),
нсравсн-
(и (Ь)},
и=1- о, а это равносильно
выпуклости (вниз) функции 5(5). Как извостно [ПП], критерисм
выпуклости
дифференцируемой
функции
является
неубывание
ее производной.
Поэтому функционал „/.[и] выпуклый, если
функция 3(5) не убывает на [а, 6].
Аналогично условисм, достаточным для выпуклости функционала, Лу[и|, является выпуклость функции ()(5), или нсубывание функции 4(1). Действительно, в случае выпуклой функции
0 (<) имеем
ь
[о
+ ииз] = 9)
ь
+ пир (т)) Чт <
а
< | (96)
ь
виды)
=о
|
быт
ь
+
|
Фик)
где 1 (2), и2(5) Е Са, 8]; о Е (0,1);
а
= ори]
ии,
р=1- в.
Итак, функционал (9.50) является выпуклым при условии,
что функции 4(%) и з(и) не убывают.
Нетрудно убедиться,
что этот функционал будет строго выпуклым, если функция
9(2) является монотонно возрастающей. Отметим, что строгая
монотонность $(15) не обеспечивает строгой выпуклости функционала ./.[и|, так как
[оил + (1-— в)и2] = а [и1 |+ (1- в) Л [и2]
для любых функций и! (7) и и2(1), имеющих одинаковые значения в точке 6.
Вопросы и задачи
Вопросы
351
и задачи
9.1. Убедитссь, что соотношения (9.2) и (9.3) удовлетворяют
всем аксиомам скалярного произведения и нормы соответственно.
9.2. Постройте функционал,
соответствующий
краевой за-
даче для обыкновенного дифференциального уравнения (ОДУ)
(9.32) с краевыми условиями
и (в) — аи(а) =а,
где с, а,
ВЕ В.
и) = В,
Исследуйте этот функционал на выпуклость и
укажите для него множество допустимых функций.
9.3. Для ОДУ
р(туи" (=) +а(туи (2) + с(т)и(=) = [(т),
с краевыми условиями
и(а) = и($) =0
укажите
те [а, 6),
требования к
функциям р(1), а(т) и с(т), выполнение которых позволит построить соответствующий этой краевой задаче строго выпук-
лый
функционал.
На каком
множестве
функций
допустимо
рассматривать этот функционал?
9.4. Постройте функционал,
даче для дифференциального
соответствующий
краевой за-
уравнения
—Аи(ж) + (жи (в) = 1(т),
ЕТ,
где с(2), }(ж) е С(У), с краевыми условиями (9.36), (9.44). Укажите множество функций, на которых допустимо рассматривать этот функционал.
10. МЕТОДЫ РЕШЕНИЯ
ВАРИАЦИОННЫХ ЗАДАЧ
10.1. Минимизирующие
последовательности
Рассмотрим некоторый функционал /Л[и]
пространстве 7{, ограниченный снизу, т.е.
шё
ие р(.Т)
Бесконечную
для которой
[мц] =а>
последовательность
в гильбертовом
—©о.
элементов
ии © 2(./),
пЕ М,
Ши Лфи|= а,
по
называют лиинимизирующей
последовательностью функ-
ционала „/|ч|.
Построение минимизирующей последовательности позволяст найти наименыйсс значение рассматривасмого функционала. При некоторых дополнительных свойствах функционала,
можно утверждать, что минимизирующая последовательность
является фундаментальной в заданном функциональном пространстве. В случае полного функционального пространства
это означает, что минимизирующая последовательность {и}
сходится по норме пространства к некоторому элементу чи, который будет точкой минимума функционала, если функционал
непрерывен.
Квадратичный функционал Л [м] = (Ам, м) — 2(}, м), соответствующий операторному уравнению Ач = } с симметрическим оператором А, определен лишь в области, определения
Р(А) этого оператюра. Всюду в О(А) этот функционал имсет первую вариацию д./[ч| = 2(Аы, ди) — 2(}, ди). Если А —
10.1. Минимизирующие последовательности
353
положительный оператор, то функционал Ли] строго выпуклый. Если он достигает своего минимума в некоторой точке
и», то эта точка единственная и является стационарной точкой
функционала, т.е. о.Л[и„., 0%] =0 (см. свойства 9.5 и 9.6).
Если оператор А, деиствующий в гильбертовом пространствс
Я,
являстся
положительно
определенным,
т.с.
для
нско-
торого числа,
> 0 выполняется неравенство (Ачи, и) 25?|?,
ие О(А), то можно ввести энергетическое скалярное произведение
(м,
индуцирующее
о)
=
(Ам,
энергетическую
5)
}
(10.1)
норму
ыа = Им.
(10.2)
При этом
Пл
29 м.
(10.3)
Несложно проверить, что введенное таким образом умножение
удовлетворяет всем аксиомам скалярного умножения. С помощью энергетического скалярного произведения квадратичный
функционал можно записать в виде
Ри] = (ши) д — 2 (Туи) = ша
2, м).
Его обычно называют функционалом
энергии.
(10.4)
Отметим, что из сходимости последовательности и Е 0(А)
по энергетической норме* к некоторому элементу ие 0(А) следуст сходимость ип —? и по норме гильбертова пространства,
поскольку
для
положительно
гласно (10.3),
Поэтому
если
определенного
ыы <
(А)
—
полное
оператора
А,
ыы м.
евклидово
со-
(10.5)
пространство
от-
носительно энергетического скалярного произведения, то оно
*Такую
гии.
сходимость
иногда
кратко
называют
сходимостью
по
энер-
354
10. МЕТОЛЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
является линейным подпространством гильбертова пространства 741 (т.е. замкнутым линейным многообразием). Если же
Р(А) относительно энергетического скалярного произведения
не является полным, то его можно пополнить, т.е. расширить до
полного евклидова пространства дл, причем такое пополнение
можно провести в рамках гильбертова пространства, 71. Полное евклидово пространство {д называют энергетическим
пространством.
Нетрудно видеть, что функционал энергии ./,[и| естественным образом продолжается на. все линейное
пространство Яд с помощью
той же формулы
(10.4).
Теорема 10.1.
Если А — положительно определенный
оператор в 7{ и шо — решение операторного уравнения Аи = 7,
то любая минимизирующая последовательность функционала,
энергии
сходится
к 0.
< Пусть Аи =
ЛицЕ (А). Тогда, используя свойства, скал
лярного умножения и учитывая симметричность и положительность оператора А, получаем
Ли] = (и, м) д — 2(Ащо, и)
= (ищи
(ид, мо) д — (що, мо) д =
ма
(мо, ид
>
(10.6)
Из этих преобразований видно, что элемент и является точкой
минимума функционала „Л. [м] и значение 1. [м0] = -— |0 |[^2 для
функционала наименьшее. При этом
[м — мол = 74 [4]
Если последовательность
4 =
[М] —
[49].
{и„} является минимизирующей
для
функционала 8 [м], то
[м — 4 [мо] —0 при п —* со. Значит,
и [и - ч | —> 0 при п — со, т.е. минимизирующая последовательность сходится к ио по энергии.
Согласно (10.5), эта
последовательность сходится к о также по норме гильбертова,
пространства, 7.
10.1. Минимизирующие последовательности
355
Напомним, что в случае положительного (в частности, положительно определенного) симметрического оператора А любое
решение операторного уравнения Ац = } является точкой ми-
нимума функционала энергии и наоборот (см. теорему 9.2), а
согласно теореме 9.1, такая точка единственная. Но вопрос, сушествует ли такая точка и при каких условиях, пока открыт.
Теорема 10.2. Функционал энергии имеет в энергетичсском пространстве точку минимума, и притом единственную.
ч
Согласно
представлению
(10.4),
функционал
энергии
4,[ч]
является строго выпуклым, так как в этом представлении слагаемое 2(], и) является линейным функционалом и его можно
не учитывать (см. замечание 9.2), а другое слагаемое — квадрат нормы — является строго выпуклым функционалом (см.
пример 9.15). При этом, согласно неравенствам Коши
Буня-
ковского и (10.3),
52 2
Иа мА =
Зима
— 2 (Ди) > ша 2 Ям Па
2
м
(мА ор Ул) — ое, [м — оо.
Нетрудно убедиться, что относительно энергетической нормы
функционал энергии — непрерывный функционал.
Действительно, с учетом неравенства, (10.5) имеем
|7 [м + би] — Л. [м] =
= бы
— 2 (м бы)
< ше
дщ — Пы а +2
+27
при
с
(1, ди)| <2
бы | < 2 [шла
|6и|\ > 0.
А
это
ши
<
(м, би) | + бы
2.2
2
би + 78 Ул 19] д
и означает,
что
функционал
непрерывен в произвольно взятой точке ме П(.],).
0
У, м]
356
10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
Итак,
свойства
функционал
9.4
он
энергии
достигаст
непрерывен.
наименьшего
Поэтому
значения
в
в силу
энергети-
ческом пространстве. Согласно свойству 9.5, точка минимума
у строго выпуклого функционала единственная. №»
Как утверждается в доказанной теореме, функционал энергии достигает наименьшего значения на некотором элементе
и„, причем наименьшее значение функционала равно — ||. ||.
Если и, © О(А), то этот элемент, согласно теореме 9.2, является
решением операторного уравнения Ам = Х. Но это выполняется
нс всогда, и если 1, & Д(А), то операторное уравненис не имсет решений, так как любое решение 10 операторного уравнения
есть точка минимума функционала „Л, [и]. Нетрудно показать,
что
тогда
чо
есть
точка
минимума
функционала,
энергии
и
в
Нл, т.е. должна совпадать с м.
Если операторное уравнение Аи = } имеет решение, то его
называют классическим решением. В случае симметрического положительно определенного оператора, А, ссли операторное уравнение не имеет решений, интерес представляет точка
минимума и. функционала энергии,
ным решением уравнения Ам = }.
сс называют
обобщен-
Напомним, что 7/ = Г2($2) есть сепарабельное гильбертово пространство. Можно показать“, что и соответствующее
энергетическое
пространство
Яд С Я,
будучи линейным
под-
пространством гильбертова пространства, 7/, также является
сепарабельным. В таком линейном пространстве существует
счетный базие {ит}. При этом, так как, по предположению,
Р(А) всюду плотно в Я, счетный базис можно построить толь-
ко из элементов этого множества [1Х]. При заданном счетном
базисе обобщенное решение можно представить в виде
[®.®
м. — У` ати т,
т=1
*См.:
Треногин В.А.
@т © Е,
(10.7)
10.1. Минимизирующис послодовательности
357
где сходимость ряда рассматривается относительно энергетической нормы.
Если последовательность {ит} является ортонормированной системой функций гильбертова пространства Ял, то ряд
(10.7) будет рядом Фурье по этой системе и его коэффициенты
@т можно найти по формулам Эйлера — Фурье:
ат = (ик, итд
= (Тит),
ут Е М.
(10.8)
Последовательность функций
№
им
=
У. ати,
МЕМ,
(10.9)
=1
представляющая собой последовательность частичных сумм ряда (10.7). сходится по энергетической норме к обобщенному
(или классическому) решению и„. В силу непрерывности функционала
энергии
рующей
для функционала
эта
последовательность
./, [м].
являстся
Элемент м
минимизи-
при фиксирован-
ном М называют приближенным решением операторного
уравнения Аи = }{.
Если счетный базис является ортонормированным, то для
частичных сумм ряда (10.7), являющегося в этом случае ря-
дом
Фурье,
№М=1,2,...,
убывает.
верно
соотношение
|чим-и— ид
т.е. последовательность
< [им - мч,
{|им —и„|л}
монотонно
Значит, с ростом числа М функций ит, использус-
мых в приближенном решении (10.9), точность приближенного
решения (в смысле энергетической нормы) уравнения Аи = }
возрастаст.
Однако сходимость минимизирующей последовательности
еше не означает, что
В
|Аем
Л =0,
(10.10)
№М—> оо
т.е.
стремится
к
нулевому
элементу
невязка
в
уравнении
Ац
—
= ] при подстановке в него приближенного решения им. Соотношение (10.10) имеет смысл лишь в том случае, когда,
ит Е О(А),
ът= 1, М.
358
10. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
Отметим, что установленные для случая положительно определенного оператора результаты имеют, главным образом, теоретическое значение, поскольку на практике этот случай встречастся достаточно редко. Однако возможность построить минимизирующую последовательность в некотором сепарабельном гильбертовом пространстве лежит в основе методов приближенного решения широкого круга прикладных вариационных задач. При этом важно предварительно убедиться, что это
пространство совпадает с множеством допустимых функций
для функционала, входящего в вариационную формулировку
конкретной краевой задачи. В качестве такого пространства,
обычно можно выбрать множество функций, интегрируемых с
квадратом и с весом вместе со своими производными определенного порядка.
Пример
10.1. Рассмотрим функционал [и], определяемый
соотношением
[а
(9.31), в котором (5) > 0, с(5) > 0 на отрезке
иа/а1 20, 8/81 20.
Областью определения этого функци-
онала является линейное многообразие С"[а,6] в гильбертовом
пространстве Г2[а,6].
по формуле
(и, %) =
Введем в С [а, ] скалярное произведение
орбедиае(о) , ВУ
о
+
81
и(т)5(т)) 4т.
(10.11)
Можно показать, что выполняются все аксиомы скалярного
умножения. Пополненное относительно этого скалярного умножения линсйнос многообразие С'[а,5] становится сепарабельным гильбертовым пространством, в котором функционал [и]
можно
записать
в
виде
ь
=
ыы
_
— | Модшуае+ пд
_ В,
(10.12)
10.1. Минимизирующие последовательности
359
а, сходимость минимизирующей последовательности этого функционала рассматривать по норме, индуцпированной скалярным
произведением
Пример
(10.11).
10.2.
Функционал
[и]
(9.42) определен на линей-
ном многообразии 2(.7) = СЦУ) ПС(И) в гильбертовом пространстве Г2(У). Он является выпуклым при #(2) > 0,
#ЕУ, и
@(2)/
1 (2) 20, Е 5} (см. пример 9.18). В О(.) можно ввести
скалярное произведение
(и) = [дих
+ Гебшов.
(10.13)
1
у
5ь
После пополнения относительно введенного скалярного умножения получаем сепарабельное гильбертово пространство, в
котором функционал можно записать в виде
ЛИ
мР
[лиам — [ныая
у
(10.14)
5»
Сходимость минимизирующсй последовательности этого функционала, удобно рассматривать относительно нормы, индуцированной введенным скалярным произведением.
%#
Характерной
(10.12)
и (10.14)
особенностью
является
то,
в
виде
что в них как слагаемое
записи
функционалов
вхо-
дит квадрат нормы. Именно это слагаемое определяет строгую выпуклость функционала, и тем самым единственность его
стационарной
точки.
Такая
запись
оказалась
возможной
бла-
годаря введению соответствующего скалярного произведения.
Однако в случае функционала, (9.50). соответствующего нелинейной краевой задаче, не удается ввести подобное скалярное
произведение.
Поэтому сходимость минимизирующей последовательности этого функционала приходится рассматривать
относительно нормы, индуцированной исходным скалярным
произведением в гильбертовом пространстве Г2(9).
360
190. МЕТОДЫ
РЕШЕНИЯ
10.2. Методы
решения
Пусть
иинейный
ном гильбертовом
ВАРИАЦИОННЫХ
ЗАДАЧ
приближенного
вариационных
оператор
А,
задач
действующий
пространстве
И, является
в сепарабель-
положительно
определенным с областью определения 0(А), всюду плотной
в Я. Тогда О(А) можно пополнить до энергетического про-
странства Нд. Последовательность приближенных решений
м операторного уравнения Ам = } будем искать в виде последовательности частичных сумм ряда (10.7):
М
их = У ‘ати,
М=1,2,...,
(10.15)
т=1
где {ии} — счетный базис в На.
В 10.1 показано, что {им}
является минимизирующей последовательностью функционала,
сходящейся к обобщенному решению по энергетической норме.
В силу введенной в #л энергетической нормы для элемента,
им
вычислим
м
|262
—
№
Ув
У`
в=1
т=1
Ст (ить, ит) д.
(10.16)
Если счетный базис {из} является ортонормированной
стемой функций в НА, то (10.16) можно упростить:
си-
м
[м
И =
У`
а?
мт
2.
(10.17)
тТ=1
В этом
случае
коэффициенты
Эйлера — Фурьс (10.8).
а»
можно
найти
по формулам
Однако построение ортонормирован-
ной системы (например, с помощью процесса ортогонализации
Грама — Шмидта из некоторого исходного счетного базиса) —
достаточно
трудоемкий
процесс.
Способ
нахождения
коэффи-
циентов а для произвольного счетного базиса в {д называют
методом Ритица. Суть метода состоит в следующем.
10.2. Методы приближенного решения вариационных задач
Если
подставить
(10.15)
вместо
и в квадратичный
361
функ-
ционал Ли] = ||“. — 2(1, м), достигающий на обобщенном
решении м, Е Жд своего наименьшего значения, то, учитывая
(10.16), получим многочлен № переменных второй степени
и [м]
—
^—2(1, им) =
[|6 №
м
м
м
ат(ить ит)д-2
а
п=
1
т—-
1
@ т, (Х, ит)
т—
1
относительно коэффициентов ат, ® = 1, №, определяющий дифференцирусмую функцию в В”.
Поскольку квадратичный
функционал ограничен снизу, то эта функция также ограничена снизу и достигает минимума при некотором наборе значений
коэффициентов ат. Для нахождения этих значений можно использовать необходимые условия минимума функции многих
переменных:
9-1
дат
0, тетЬМ.
В результате получим систему линейных алгебраических уравнений (СЛАУ)
м
У
(и,
Ут) А @
= (Г, ит),
(10.18)
т = ТМ.
п=1
Матрипей
СЛАУ
(10.18) является
матрица
Грама
для си-
стемы функций ии, т = 1, №, относительно энергетического
скалярного произведения. Эта матрица нс вырождена, поскольку элементы ит, т = 1, №, линейно независимы
[ТУ].
Поэтому
СЛАУ (10.18) имеет единственное решение а»,м, п = 1, №. Второй индекс в обозначении коэффициентов а’„м показывает,
что
они, вообще говоря, зависят от М.
Пример 10.3.
Из курса сопротивления материалов известно, что зависимость от продольной координаты х прогиба,
362
10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
1(х) упругой балки, нагруженной распределенной по сс длине поперечной нагрузкой 4(5), удовлетворяет обыкновенному
дифференциальному уравнению (ОДУ)
(10.19)
2600,1,
=9(2),
п
12 и)
412
где Ё — модуль упругости материала балки; / —
ции поперечного сечения балки; [ — длина балки.
Е. характеризует жесткость балки на изгиб.
Е. = сор, 9(5)
Ч0
+ | | | | | | | | | |
концы
е
х
=
ные
1%)
Рис.
балки
опоры
имеют
(рис.
точках 5 =О0и
101
момент инерПроизведение
Примем, что
= 4 = с0п86, а
;
шарнир-
10.1),
т.е.
5 = [ равны
в
ну-
лю прогиб и кривизна, изогну-
ис
той продольной оси балки:
(0) = #1) =”
(0) ="
=0.
(10.20)
Для принятых предположений дифференциальное уравнение
(10.19)
является
операторным
в
ляемым
линейным
уравнением
дифференциальным
граничными условиями
(10.20).
А(л)
= 4, опреде-
оператором
4
А = я
4.
И
Функцию 1(5) можно найти,
последовательно интегрируя уравнение и” = а, гдеа=а9/(Е4),
и учитывая
и"(т)
граничные
= аж
Сл,
условия:
в" (т) = па?
ил)
9,3 — 47
@ 2+5,
2
и (1) =— 52
Си _=0,
С
Се
Оь
С. =0,
Ге.
С=
т 2’
ил
ЧЕ З+Се+Сь
3
ПУ 94 _ 127
_ #8
од
В итоге получаем уравнение изогнутой продольной оси балки:
—А
(т) = ри
28-7),
п= т Е (0, 1.
(10.21)
10.2. Методы
приближенного решения вариационных задач
363
Из симметрии условий закрепления и нагружения балки следуст, что максимальный прогиб иштах балки будст в сс серединс,
т.е. при т = 1/2. В этом можно убедиться и формальным путем, если исследовать на экстремум функцию 10(7). Из (10.21)
при т = 1/2 следует хорошо известный из курса сопротивления
материалов результат
55= 391‘ Ет®
Ч
шах = 381
Располагая
точным
решением
па
0,013021аГ.
краевой
У (1) =9 с граничными условиями
решения метод Ритца.
Для этого
задачи
для
уравнения
(10.20), применим для ее
предварительно выясним
область определения оператора А = а
иего свойства.
В качестве области определения оператора А примем множество С1[0,[ четырежды непрерывно дифференцируемых
функций, удовлетворяющих однородным граничным условиям
(10.20).
Это
множество
является
линейным
всюду
плотным
многообразием в гильбертовом пространстве Г.2[0, |. Убедимся, что оператор А с заданной областью определения является
симметричсским.
В
самом
деле,
для
произвольных
функций
П(А), последовательно интегрируя по частям, получаем
=
ше
|
— [ибн
р
т = — (ти(т) ,
364
10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
Также последовательным
интегрированием по частям для
произвольной функции и Е Р(А)
находим
Из равенства (Аш,4) =0 следует, что (5) = 0, т.е. 4(1) =
= Сж-+ 05. Но из граничных условий (10.20) получаем =
= С. =0. Поэтому (4) = 0 и оператор А является положительным.
Можно
доказать”,
что
оператор
А
с заданной
областью
определения является и положительно определенным, т.е. для
некоторого числа
> 0 верно неравенство (Аш, 1) 2 5? ||,
шЕ (А).
Поскольку операторнос уравнение с симмстрическим и положительным оператором А имеет в О(А) решение (10.21), то
квадратичный функционал „1% [и = (А, 2) — 2(4, №) на этом
решении, согласно теореме 9.2 о квадратичном функционале,
достигает своего наименьшего значения. Приближенное решение этого операторного уравнения представим в виде
№
арм = Ха» зшпилх,
=
у Е [0,1],
(10.22)
=
и отметим, что ®м удовлетворяет всем граничным условиям
(10.20). Подставляя (10.22) в функционал „7, |] и учитывая вид
*См.:
Ректорис
К.
10.2. Методы приближенного решения вариационных задач
365
скалярного произведения в гильбертовом пространстве [20,1],
получаем функцию М переменных
2х] = (Аб, бу) —2(, 6) =
м
м
= ›
ал >
п=1
г
м
ат [| (блоха)
т
киитат
2
1
м
пллл
)
ит [шила
т=1
м
=
1
)
(^^)
п=1
=
0
1
)
ат, [ зшуйлт зш илт —
у9
т=
м
У9х1
-(1
и
относительно коэффициентов
гочленом второй степени.
т
(10.23
Чт
ат, т = 1, №, являющуюся
(
)
мно-
Система функций {зшилт} на отрезке [0, 1] ортогональная
(но не ортонормированная):
1
|
шит
И
зтилтар =
0
1
2
0,
=,
т=п;
ти.
Поэтому в данном случас нсобходимос условис минимума функции (10.23) приводит к СЛАУ с диагональной матрицей, что
позволяст
записать
явнос
выражснис
для
каждого
коэффици-
ента:
п
ав = си,
(ит)
пПЕМ.
(10.24)
Отметим, что коэффициенты а„ не зависят от количества,
№ рассматриваемых функций счетного базиса, что является
следствием ортогональности счетного базиса.
Это означает,
что формулы (10.24) дают точные, а не приближенные значения
коэффициентов.
366
10. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
Если в (10.22) ограничиться лишь одним первым слагасмым,
то получим
и
ь
ил = изшлт = 5
Это приближенное
при
Е
эшля= 0,013071—
РИ
решение для максимального прогиба, балки
2 = 1/2 дает значение @щах == 0,0130719
/(Е.Т),
которое
отличается от значения илиах, полученного из точного решения
(10.21), менее чем на, 0,5%.
Характерно, что при п = 2 имесм а2 = 0, т.с. функция
зт2лх, будучи нечетной при переносе начала координат на
рис. 10.1 в точку х =1/2, „не участвует“ в формировании
приближенного решения задачи, симметричной относительно
этой точки. Из (10.24) видно, что такая же „участь“ постигнет
в (10.21) все слагасмыс с четными номерами.
Для п = 3 имеем аз = 49
/(3п)? = 0,0000544
(Е.Л) и
4
—
.
.
4
.
.
23 = ал зшят + аззт3лт = — а зтл +
а зтЗлт =
п?
(3*)5
= (т
В
точке
всрными
тах,
х =1/2
получаем
знаками
после
ВЫчисленным
по
значение
запятой
точному
@зА
п
1
. Зе
+ в”).
0,013017,
совпадающес
решению.
со
с
пятью
значением
Я
Метод Ритца можно использовать для нахождения приближенного решения не только в случае квадратичного функционала. Процедура этого метода применима и тогда, когда не
удается построить строго выпуклый функционал по варцационному уравнению, соответствующему заданному операторному
уравнению
А(и) =.
Пусть
в этом
случае область
определе-
ния (А) оператора А(-) (не обязательно линейного) является
всюду плотной в сепарабельном гильбертовом пространстве 71
и известна такая система {и} функций и Е О(А), тЕ К,
образующая
счетный
базис
в 7,
что
система
{ит}
функций
10.2. Методы
т» = А(ит)
приближенного решения вариационных задач
367
также образует счетный базис в 7{. Это означает,
что любой элемент } Е { можно представить в виде ряда
= ух Спот
т ЕЕ.
(10.25)
=1
Рассмотрим
функционал
(10.26)
- ЛГ,
Ем = |А(и)
который достигает наименьшего (нулевого) значения на, элементе и* Е О(А) (если он существует), удовлетворяющем операторному уравнению, т.е. Ам” = }. Приближение к этому
элементу будем искать в виде
и = У`бтит,
= ш,ЕВ
Подставив (10.27) в (10.26), получим
цию № переменных 61, 62, ..., Вм№
= |А (ый,
ФБ... 6) = Ем
МЕМ.
неотрицательную
Значения
м
переменных
в точке
конечномерной
минимума
оптимизации
функ-
=
-
- 1].
= “(Ув
т=1
методов
(10.27)
можно
[ХГУ]
найти
исходя
Ф(Ы,....6м) = | А(и\,) — ПР Ш.
из
(10.28)
одним
ИЗ
условия
(10.29)
При этом в общем случае выполнение условия (10.29) нс гарантируст сушествование сдинствснного элемента и\,.
Если оператор А линейный, то функция ф(&1,....,бу} будет
многочленом второй степени от переменных $1, ..., 6м и, следовательно, дифференцируемой в В”. Значения переменных,
368
10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
обеспечивающих минимум этой функции,
рять необходимым условиям минимума
дф
—
9ь.. = 0,
должны
удовлетво-
тт =1, №
Отсюда получасм СЛАУ
№
У
(®„, 9п,) 6, = ({,5т),
т=Т
М,
(10.30)
В=1
имеющую единственное решение, поскольку ее матрица является матрицей Грама относительно скалярного произведения
в 7{ для системы линейно независимых элементов © © 7,
т =1,
№. В случае
А можно доказать”,
положительно определенного оператора,
что последовательность элементов и;
(10.27), для которых коэффициенты 6 являются решением
СЛАУ (10.30), сходится в {д по энергетической нормс, а значит, и по норме гильбертова пространства, к обобщенному
решению и, уравнения Ам = {. При этом, согласно (10.29),
Аи> Х при
№ сс.
Описанная процедура приближенного решения операторного уравнения характерна, для метода наименьииие квадратов.
Несложно убедиться, что при использовании метода наимень-
ших квадратов
для нахождения
коэффициснтов
@„ (пе М)
в
приближенном решении (10.22) краевой задачи, рассмотренной
в примере 10.3, придем к тому же выражению (10.24).
Если известно, что обобщеннос решение м, операторного
уравнения Аи = } с положительно определенным оператором
А совпадает с классическим решением этого уравнения, т.с.
. Е П(А) и Аи, = Х, то функционал
Ф[и]
= (Ам, и) — 21, м) + |Аи- 1’,
*См.:
Ректорис
К.
— ие БА),
10.3. Собственные значения симметрического оператора
369
достигнет своего наименьшего значения именно на элементе чи,
(см. 10.1).
Применение
метода Ритца, для построения миними-
зирующей последовательности {[и„} функционала, Ф и] из элементов вида (10.15) при произвольном счетном базисе в { приводит к методу Куранта”. Для метода Куранта сохраняет
силу соотношение (10.10) без использования ортогонального базиса из собственных элементов опсратора А. Примененис этого
метода для вычисления коэффициентов а„ (ве М) в приближенном решении вида (10.22) краевой задачи из примера 10.3 снова,
приведет к (10.24).
Отметим,
что
метод
Ритца
позволяст
использовать
счетный
базис, элементами которого могут быть функции, принимал
ющие ненулевые значения лишь в отдельных подмножествах
области определения оператора. Такая возможность рсализована, например, в методе конечных элементов.
10.3. Собственные значения
симметрического оператора
Одной из распространенных прикладных задач является
так называемая проблема собственных значений линейного оператора, входящего в формулировку краевой задачи. Эта, задача,
состоит в нахождении ненулевых решений однородного операторного уравнения с однородными граничными условиями. Ее
решение может быть получено вариационными методами.
Напомним, что ненулевой вектор х произвольного линейного пространства С называют собственным всктором линсйного
оператора (иногда, собственным элементом оператора) А, действующего в С, если для некоторого числа, А верно равенство
Ах = Аж. При этом число А называют собственным значением
(или собственным числом) линейного оператора А.
В случае конечномерного линейного пространства С собственные значения А — это все такие числа, для которых
*”Р. Курант (1888-1972) — математик, родившийся в Польше и работавший до 1933 г. в Германии, а затем в США.
370
190. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
оператор А - АГ (Г — тождественный оператор} не имеет обратного (т.е. необратим).
В случае бесконечномерного
пространства оператор А — АГ может не иметь ограниченного
обратного оператора” хотя бы по одной из двух причин:
а) оператор А - АГ не является инъективным (взаимно однозначным). Это равносильно тому, что уравнение (А — ЛГ)х =0
имеет ненулевое решение, или, другими словами, число Л является собственным значением оператора:
6) образ оператора, А — АГ нс совпадаст со всем пространством Д.
Совокупность всех тех Л, при которых оператор А — АГ не
имсет ограниченного обратного, называют спектром линейного оператора А. Спсктр сстествснно разделястся на, двс
части в соответствии с двумя причинами нарушения обратимости. Множество собственных значений (причина „а“) составляет дискретный спектр линейного оператора, а остальная часть спектра (причина „б“) — непрерывный спектр.
В ряде случаев линейный оператор не имеет непрерывного
спектра, а дискретный спектр можно представить как некоторую последовательность значений Л„,
пЕ М Отметим, что
собственные векторы действующего в евклидовом пространстве & симметрического оператора А, отвечающие различным
собственным значениям, ортогональны. В конечномерном случае (тогда А является самосопряженным оператором) это до-
казано в [ТУ], но доказательство на самом деле нс связано с
размерностью линейного пространства и проходит в произвольном евклидовом пространстве. Естественно, возникает вопрос,
можно ли из собственных векторов линейного оператора, соста»
вить базис линейного пространства. В бесконечномерном сепарабельном гильбертовом пространстве под базисом понимают
*Линейный
оператор
А
в нормированном
пространстве
С
называют
ограниченным оператором, если для некоторого числа К > 0 верно
неравенство ||Аж|| < К|| ||,
ЕС. Наименьшее из таких чисел называют
нормой оператора.
10.3. Собственные значения симметрического оператора
371
любую полную (или замкнутую, что одно и то же) линейно независимую систему [1ТХ].
Задача определения собственных значений линейного оператора возникает во многих прикладных задачах. В [ХП] рас-
смотрена задача поиска, собственных значений и собственных
функций оператора Штурма — Лиувилля, играющая большую
роль в решении многих уравнений математической физики
[ХП].
К аналогичной
задаче
приводит
изучение
собственных
(свободных) колебаний механических систем.
С проблемой
собственных значений сталкиваются и при изучении вопросов
устойчивости механических систсм.
Проблему собственных значений можно свссти к решению
некоторой вариационной задачи. Если симметрический оператор А, действующий в евклидовом пространстве &, удовлетво-
ряет неравенству (Ам, и) > Км? (КЕ В) для любого вектора,
иЕ &, то его называют оператором, ограниченным снизу. Ясно, что при К > 0 этот оператор является положительно
определенным,
а, при Е =0
тесно
с собственными
связано
оператора.
так
— положительным.
значениями
Число
симмстричсского
Для любого собственного значения
А имссм А2а,
как
@ = Ш
(Аи,и)
и70
(м, м)
<
(Ацл, их)
(ил, ил)
=
(Лили)
(и, ил)
где ил — собственный всктор, отвечающий
чению
=
ЛА(ил ил)
=А,
(мл, ил)
собственному зна-
А.
Теорема
10.3.
Если симметрический оператор А ограни-
чен снизу и для некоторого вектора ид
372
10. МЕТОДЫ
РЕШЕНИЯ
то сх есть наименьшее
ВАРИАЦИОННЫХ
собственное
ЗАДАЧ
значение оператора
указанный вектор 0 — собственный
собственному значению с.
вектор
А, а
А, отвечающий
< Рассмотрим оператор В = А - оГ. Тогда
(Ви, и) = ((А-оТуи, и) = (Аи, и) -а(и, и) 20,
т.е.
В —
неотрицательный
оператор.
При этом
(Вид, чо) = (Ацд, чо) — а (имо, що) =0.
Пусть © — произвольный вектор. Используя свойство симметричности оператора В, вытекающее из симметричности А,
получаем в силу неотрицательности В, что
(В(щ
- №), чо
1%) = (Ви,
140) =
+24 (Во, 5) +В |5 [= |5 [+ 2 (В, %) > 0.
Но
такое
неравенство
будет
верным
при
любых
# только
в
случае, когда (Вящ, ®) = 0.
Итак, (Ви, 9) =0 для любого вектора, ®. Взяв, в частности,
у = Вщо, получим |Вщ| =0, откуда Вщо = 0.
Переходя
к оператору А, приходим к выводу, что (А — аГ)ио = 0 или
А
= а\о,
отвечает
т.е.
вектор
собственному
мо
является
значению
©.
собственным
Как
для
А
уже показано,
и
все
собственные числа А удовлетворяют неравенству А > а. Значит,
©
— наименьшее собственное значение. №
Доказанная тсорсма позволяет переформулировать задачу
определения наименьшего собственного значения ограниченного снизу симметрического оператора, как задачу поиска наименьшего значения функционала:
(Ам, м)
и = Чи)
— шГ.
(10.31)
10.3. Собственные значения симметрического оператора
Этой задаче можно придать другую формулировку.
что
т (Аи,и) <ш
изб
(мм)
Си
373
Очевидно,
(Аи, и)
и)
(4,9)
Но
А
А
изм)
(м, м)
—
щи)
|||
=
(4(=)
У
) т)
м
=
(Ащо,
где вектор 140 = м/||ц|| удовлетворяет соотношению
Поэтому на самом дело
Ш
Ам,
(Аи: и) =
и70 (и, и)
Ш
[ши
чо),
|0 | = 1.
(Ацы).
Таким образом, наименьшее собственное значение симметрического оператора А можно найти, решая вариационную
задачу для функционала, /[2] = (Ах, ®):
(Аз, ж) — ШЁ,
[= =1.
(10.32)
Пусть спектр симметрического ограниченного снизу оператора А состоит из последовательности А1, ..., Ап, ... собственных значений, причем всс они простыс, т.е. соответетвующсес
собственное подпространство оператора одномерно.
Предположим, что наименьшее собственное значение Л, и отвечающий сму собственный всктор ж1 найдены, например, как
решсенис задачи (10.32). Тогда ортогональное дополнение НТ
к собственному подпространству Н = зрап{ж1} оператора А
является инвариантным подпространством этого оператора.
Значит, можно рассмотреть ограничение оператора А на подпространство Н- и поставить задачу вида (10.32), но с дополнительным ограничением:
(Ат, в) > Ш
У ограничения
оператора
последовательности
му
если задача
[2|=1,
А на НТ
собственных
(10.33)
(м, в) =0.
имеет
(10.33)
снектр будет состоять
значений
решение,
А2,
то это
Аз,
...
из
Поэто-
решение
даст
374
10. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
собственное значение А2 и соответствующий сму собственный
вектор 22. Так как поиск наименьшего значения в (10.33) происходит на подмножестве множества, определяемого в (10.32)
равенством | || = 1, то
22 А,.
Описанный процесс можно продолжить.
собственные
значения
А1,
...,
Ап_1
и
На я-м шаге, зная
соответствующие
им
собственные векторы 51, ..., ®„_1, решаем задачу
(Аж, ж)
> шШЁ,
[2 =1,
(0,2) =... = (а 2)
=0.
Если эта задача, имеет решение, то оно даст собственное значение Л» и соответствующий ему собственный вектор ж». Ясно,
что А» > А,_1. Если симметрический оператор А положительно определенный, т.е. (Аж, 2) > 7? || при х #0, то все его
собственные значения положительны (не меньше 72).
Замечание 10.1. Множество Х в сепарабельном гильбертовом пространстве 7{ компактно, если любая последоватсльность {2
} © Х содержит сходящуюся (по норме пространства)
подпоследовательность. Аналогично, используя сходимость по
энергии, можно ввести понятие множества, компактного
по энергии. Компактное множество является ограниченным
и замкнутым. В конечномерном пространстве эти два, условия
являются и достаточными, но в бесконечномерном пространстве это уже не так
Множество, имеющее компактное
замыкание, называют предкомпаютины,м.
Линейный оператор А называют компактным (вполне
непрерывным), если он любое ограниченное множество отображает в предкомпактное. Вполне непрерывный оператор непрерывен, но не всякий непрерывный оператор является вполне
непрерывным. В гильбертовом пространстве 7{/ = Г2[а,6] компактным является оператор вида,
ь
А+) = ] Ку
зе й,
10.3. Собственные значения симметрического оператора
375
где К(т,р) — непрерывная функция на множестве [а,6]х[а,6..
Если К(х,{) = К(Е т), то указанный оператор симметрический,
а, его спектр представляет собой последовательность {Л„|, сходяшуюся к нулю. При этом каждому значению Л», = 0 соответ-
ствует конечномерное собственное подпространство.
Линейные дифференциальные операторы, как правило, не
являются непрерывными, а тем более вполне непрерывными.
Однако в ряде случаев линейный дифференциальный оператор
А имест обратный оператор, являющийся вполне непрерывным.
Тогда оператор А имест спектр из последовательности собственных значений, стремящейся к сс [ХПГ]. Примером такого
дифференциального оператора является оператор Штиурма —
Лиувилля.
Пример
10.4.
Рассмотрим
задачу на собственные
значе-
НИЯ
Эта задача, представляет собой задачу Штурма — Лиувилля. Ес операторное уравнение Ац = Ан определяется линойным
дифференциальным оператором А = и,
который действует
в Г2[0,1], определен на множестве С8[0, | функций, дважды
непрерывно дифференцируемых на [9,1] и удовлетворяющих
граничным условиям задачи. Этот оператор симметрический и
положительно определенный (см. примеры 9.7 и 9.10). Положительная определенность оператора, означает, что он ограничен
снизу,
причем
в
качестве
константы
К
можно
взять
нуль.
Задача Штурма — Лиувилля решается аналитически. Собственными значениями оператора, А являются числа А» = п2л2,
а ортонормированная система собственных функций имеет
вид [ХПГ
(2) = У2зш(ил1),
п=Ь2,...
376
10. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦИОННЫХ
ЗАДАЧ
Выясним, как выглядит вариационная формулировка задал
чи Штурма — Лиувилля. Для произвольной функции ие |@ 0,1,
согласно (9.14) с учетом с = 0, имеем
1
(Аш, и) =
[ме
О
Поэтому наименьшее собственное
решением вариационной задачи
1
значение
А! = л” 2 является
1
и
0
ах — ши,
бора
=1,
и(0) =ч(1 =0.
#
0
Отметим, что в прикладных задачах возникает необходимость находить ненулевые решения операторного уравнения
вида,
Аи —АВи =0
(10.34)
с однородными граничными условиями, где А
симметрический оператор, а В — положительно определенный, причем
Б(А) с Б(В). Если в области определения Р(В) оператора В
с помощью соотношения ||м|в = (Ви, и)? ввести энергетическую норму ||- |в, то наименьшее собственное значение А1 и
соответствующий
ем вариационной
ему собственный элемент и! будут решенизадачи
(Ам, и) > ШЕ,
Это
можно
показать,
тельство теоремы 10.3.
Йыв = 1.
незначительно
Аналогично
(10.35)
модифицировав
доказа-
(10.33) для следующего
возрастанию собственного значения и соответствующего
собственного элемента получим задачу
(Аи, и) >
ШУ,
||“
в =1,
(Ви,
1)
=0,
по
ему
10.4. Приближенное решение задали на собственные значения
так
как
векторы
цы“
и
42,
отвечающие
различным
377
значениям
А1 и А>, ортогональны относительно энергетического скалярного произведения, порожденного оператором В (доказательство этого аналогично доказательству ортогональности собствснных
чениям).
вскторов,
отвечающих
Последовательно
А1, ..., Авт
И отвечающие
и„_1.
собственное
Тогда
собственный
элемент
(Аи, и) —ш6
различным
можно
найти
им собственные
значение
зна-
значения
элементы
м1,
Л„ и соответствующий
и„ будут решением
|м]в=Ъ
собственным
собственные
(Виш)=...
...,
ему
задачи
= (Вии щи)
=0.
10.4. Приближенное решение
задачи на собственные значения
Задачу на собственные значения ограниченного снизу симметрического оператора Ат можно свести к задаче на собственные значения для подможительно определенного оператора А. Действительно, если выполнено неравенство
22|", то оператор А! =
А- ЁТ, где &<ка1
ственный
так как
оператор,
является
положительно
(А1ж, ) = (Ав-Кзж, =) = (Аж, ж)-К
(Ах, 2) >
тоэюде-
определенным,
(т, 2) > (&-Ё)) |=? >0.
При этом, если А — собственное значение оператора А, а х —
соответствующий собственный вектор, то А1ж = Аж- = =
= Аж -— Ах =(Л-№)тх.
Значит, х является
вектором оператора А1, а соответствующее
и собственным
этому вектору
собственное значение оператора А! равно А- &'.
Итак, можно ограничиться рассмотрением лишь положительно определенного оператора А, все собственные значения
которого положительны. Покажем, как вариационная задача,
(10.32) нахождения
наименьшего
собственного значения
го оператора А может быть решена, методом Ритца.
тако-
378
10. МЕТОДЫ
РЕШЕНИЯ
ВАРИАЦПИОННЫХ
ЗАДАЧ
Рассмотрим последовательность {е„} векторов из области
(А) определения оператора А, линейно независимую и полную
относительно энергетической нормы, порожденной оператором
А.
Образуем линейную комбинииии тм = ве! +... + амем,
коэффициенты в которой подберем так, чтобы
(Ажм,
жк)
=
т.с. наименьшее
[м
Это
—
1,
значение
искать в линейной
ем.
[2
(тм,
жм)
=
2—1,
[№
энсргетической
нормы
(10.36)
|м|л
будем
оболочке конечной системы векторов е1,
приводит
к поиску
наименьшего
значения
...,
дойстви-
тельной функции № переменных а1, 42, ..., ам, имеющей вид
м
м
К(ал»....ам)= (Ав, в) =У` У (Аеи, ет) ава»,
=
(10.37)
и=1
при ограничении
№
м
(тм, жм) = У` У` (е»; ет) ава
= 1.
(10.38)
п=1т=1
Поставленная
ная
функция
№
задача имеет решение,
поскольку
переменных
своего
достигает
непрерыв-
наименьшего
значения на замкнутом ограниченном множестве [\]. Воспользуемся
методом
множителей
Лагранжа.
имеет вид Ф = (Ат, гм) -Л(жм.жм).
экстремума этой функции дает
9$
дат
Функция
м
условие
___
= У(Че,,
_
Лагранжа,
Необходимое
ет) = А(ев, ет)
аи
=0,
т=ЬМ.
(10.39)
ПЕ
Согласно ограничению (10.38), искомое решение однородной
системы
(10.39)
линейных
алгебраических
уравнений
должно
10.4. Приближенное ретение задачи на собственные значения
быть ненулсвым,
няться нулю:
т.с.
определитель
сс матрицы
(Ае1,е1)—Л(ет,е1)
...
(Аем,е1)-Л(ех,е1)
( Ае!.е>2)—
1, 2)
( А(е1,е>
1; 2)
...
( (Аем,е2)—А(ем,е:
№, 2)
( м, 2)
(Ае,ем)—А(е.ем)
...
(Аем,ем)-А(ем,ех)
должен
=0.
379
рав-
(10.40)
Так как система {е„}, и =1, №, линейно независима, то матрица Грама для векторов ет, ..., ем невырождена. Значит, в
(10.40) коэффициент при А^', равный по абсолютному значению
определителю матрицы Грама, не равен нулю.
Пусть
Ао
—
один
из
корней
алгебраического
уравнения
(10.40) №-й степени. Подставим Ао в систему (10.39) и найдем ее ненулевое решение (а7, а3, ..., а,), определяемое с точностью
до
числового
множителя.
Этот
числовой
множитель
позволяет выбрать решение так, что будет выполнено условие
нормировки, т.е. можно считать, что
мм
у
у
(е,, ет) а аб, = 1.
(10.41)
п=рт=1
Подставив
значения
тождества,
м
›
а0,
п = Т, №,
м
0
0
(Ле, ет) аи, = Ло ›
п=1
Умножим
и Ао в
(10.39),
тм
(е», ет) аи,
т=1,
получим
М.
9=1
их
0
ат
на
м
м
›
›
и просуммируем
(Ле, ет) ада, —= №»
т=1п=1
по
м
т:
м
›
аб
(еп, ет) аб@в@т.
т=1и=1
Вследствие (10.41) правая часть этого соотношения равна, Ло.
Поэтому для вектора 20, = @4е1 +...
+адем имеем
м
(Аж,
=)
м
=>
т=1п=1
Де»,
ет)
аадааб,
=
Ао.
380
10. МЕТОДЫ
РЕШЕНИЯ ВАРИАЦИОННЫХ
ЗАДАЧ
Чтобы найти решение задачи, необходимо выбрать наименьший корень Аб; алгебраического уравнения (10.40) и вы-
числить соответствующий
личивая
(МЕМ)
№,
получим
этому значению
последовательность
вектор жм.
{Л}
значений
Уве0,
и последовательность {2%} соответствующих им век-
торов. Так как при возрастании М множество, на котором идет
поиск наименьшего значения в (10.36), расширяется, последо-
вательность {^%,} не возрастает, причем Аб, > а, где а — наименьшее значение функционала в вариационной задаче (10.32).
Значит, существует предел д, № 2 а. Можно показать, что
на самом деле этот предел равен а, Т.е. последовательность
{2°,| является иинимизирующей.
Чтобы найти следующее по возрастанию после №. собствен-
ное значение оператора А, решаем вариационную задачу
(Ав.
жк)
Ш
(ам м)
=
(у, хх)
=0
на линейной оболочке системы векторов е1,..., ем, что приводит к поиску наименьшего значения той же функции
переменных при ограничениях
м
м
›
>
(ев, ет) @пат=
п=1=1
1,
м
м
>
`
(е„, ет) Уадат
(10.37) №
= 0,
п=1т=1
которые вытекают из формулировки задачи (10.33).
Пример 10.5. В задаче Штурма — Лиувилля найдем приближенные значения двух младших собственных чисел, выбрав
в качестве счетного базиса последовательность
ик (т) = (1-1),
Взяв первые две функции
менты определителя второго
КЕМ.
счетного базиса, вычислим элепорядка в характеристическом
10.4. Приближенное решение задачи на собственные значения
уравнении
(10.40}.
Для этого последовательно находим
1
(и)
(Аил,
=
1}
381
1
30
=
(ит,
з,
2)
(Аи,
12}
1
11
1
1
Ам
=
0
=
(и,
=,
(Ам,
в ЛМ
= тд»
12}
=
т.
_)
2
6 ^^
2)
—
в
^' 15
Раскрывая в этом уравнении определитель, получаем квадратное уравнение второго порядка;
1,2
13
450^ — 1051
Его
решениями
являются
А
=
.
=0.
и №
= 42.
Точные
значения
первых двух собственных чисел равны Л! = 7 = 9,8696, А› =
—=4т? = 39,4784. Нетрудно убедиться, что точность полученных
приближений находится в пределах 1,5% для первого собственного значения и в пределах 2,6% для второго собственного
значения. Отметим избыточный характер приближений.
3
Применение метода Ритица для нахождения любого собственного значения положительно определенного оператора А
обесисчиваст приближснис
сверху.
Однако на практикс наряду
с оценкой собственного значения сверху не менее важно иметь
его оценку
значения
снизу.
Наличие
позволяет
двусторонней
контролировать
оценки
сходимость
собственного
приближенно-
го решения и имсть представление о возможной погрешности
этого решения.
Оценку сверху собственного значения А! симметрического
оператора
А можно
получить,
используя
произвольный
нену-
левой элемент м (||| > 0) из области определения 2(А) этого
382
10. МЕТОДЫ
оператора.
РЕШЕНИЯ ВАРИАЦИОННЫХ
Действительно,
<
в силу теоремы 10.3
_ (Ач,м) _
м =
(ии)
(Ам, м)
^ и
р
(и, и)
Если оператор А положительный,
можно
снизу
< А2.
найти,
располагая
ЗАДАЧ
такой
ие П(А).
то оценку снизу для А!
гарантированной
оценкой
Л.
следующего собственного значения Ао, что М < А. <
Тогда, вычислив предварительно по указанному выше
нснулсвому эломенту
и Е О(А)
и =
значенис
(Ам, Ам)
придем в итоге к неравенству
(Аш, и)’
[ХИП
5)
«м <,
(10.42)
которое имеет смысл при условии А! < х. Это условие выполняется, поскольку в силу неравенства Коши — Буняковского
|(Ам, и) < Ми|-
||.
Так как для положительного оператора
А, > 0, то применение (10.42) эффективно лишь в случае, если гарантированная оценка снизу для Л такова, что их <А.. В
противном случае левая часть в (10.42) будет неположительной.
Вопросы
и задачи
10.1. Исследуйте свойства, опсратора,
определенного
на
множестве
С5[0,1]
функций
и(2),
дважды
непрерывно дифференцируемых на [0,1] и удовлетворяющих
краевым условиям (0) = и(1) = 0.
Вопросы и задачи
383
10.2. В задаче на собственные значения
ИЕ)
=
те
(0) = “(1 =0
найдите методом Ритца два первых приближения для наименьшего собственного значения А!. В качестве двух первых
функций счетного базиса используйте функции и1 (5) и и2(5) из
примера 10.5.
10.3.
ческим
Выясните,
при
собственные
является
заданных
ли заданный
краевых
значения:
а) у’=Лу, (0) =у(1
6) -у"=Ау, у(0)=у(
в) у‘ =-Лу", (0) =у
условиях,
оператор
симметри-
и решите
задачу
на
11. ДВОЙСТВЕННЫЕ
ВАРИАЦИОННЫЕ
11.1. Альтернативные
Существенным преимуществом
ки прикладной
задачи,
функционал
ЗАДАЧИ
функционалы
вариационной
которой
формулиров-
имсст
определсен-
ные экстремальные свойства, является не только возможность
применения эффективных прямых методов, но и удобные способы оценки
тельно,
приближенного
решения.
из двух приближенных решений и1 и 2
минимум
функционала
му из них,
т.е.
погрешности
ближе
к
в задаче на,
Л[и] разумно отдать предпочтение
на котором
значение
минимальному
ние функционала
Действи-
выполняет
функционала
значению.
В
/[и|
этом
роль обобщенного
то-
меньше,
случае
значе-
критерия
для
сравнения двух и более приближенных решений.
Для
количественной
оценки
погрешности
приближенного
решения и можно использовать разность А.7 = Л[м|- /[и„| зна
чений функционала
мум функционала).
(и, — точное решение задачи на миниЭту разность можно связать со значени-
ем |и-и.|. отражающим близость точного и приближенного
решений.
Но элемент
ного решения задачи,
м.
не известен
поэтому
в процессе
приближен-
не известно и значение
У[ц,|.
Следовательно, необходимо направить усилия на поиск оценки значения /[и,| снизу, чтобы получить оценку разности АУ
сверху.
Оценка, неизвестного значения /[и„| может быть получена,
если построить дополнительную вариационную задачу на максимум некоторого функционала Г[%|, удовлетворяющего услоВию
По. | = шах [%]| < ши м] = ы.]|.
(11.1)
11.1. Альтернативные
функционалы
"Тогда, для любой пары элементов и Е Б(/)
385
изе О(Г) имеем
По] < в, | < Ли. < Лы|.
(11.2)
Таким образом, получаем оценку сверху приближенного
реше-
ния и: АУ = Ли —Ли.| < Ли -Пщ.
Функционал [$], который связан с функционалом [м] условием (11.1), будем называть альтернативным
(двойствен-
ным) функционалом по отношению к функционалу Л[и], а
вариационную задачу на максимум функционала /[%|] — двойственной
вариационной
задачей по отношению
онной задаче на минимум /|[ч]|.
Отметим, что оценка приближенного
/[ы] - [$] имеет
нижнюю
границу,
решения
равную
к вариаци-
разностью
/[и,|-— Г|%,|.
По-
этому при построении двойственной задачи желательно, чтобы
эта граница была как можно меньшей. Лучше всего, когда она
равняется нулю. Однако это условис лишь необходимое и имсст в основном тсорстичоскос значение, так как в практических
вычислениях эта граница не известна. Совпадение решений у
двойственных задач еще не гарантирует хорошей оценки приближенного решения.
В прикладных задачах значение функционала, обычно имеет
определенный содержательный смысл и определяет некоторую
усредненную характеристику исследусмого объекта или процесса.
Поэтому
ность
оценить,
женное
весьма
насколько
значение
важно
двусторонняя оценка вида (11.2) даст возможточным
указанной
выяснить,
при
является
найденное
характеристики.
каких
ционной задачи, представляющей
условиях
Таким
для
прибли-
образом,
данной
вариа-
собой вариационную форму-
лировку некоторого операторного уравнения, можно построить
двойственную вариационную задалу.
Построение
цесс,
оно может
симости
от
двойственной
приводить
выбранного
задачи
—
к различным
способа
неоднозначный
вариантам
построения.
про-
в зави-
Наиболее
рас-
пространенным подходом к построению двойственной задачи
386
11. ДВОЙСТВЕННЫЕ
является следующий.
ВАРИАЦИОННЫЕ
ЗАДАЧИ
Рассмотрим задачу на минимум функци-
онала [и], определенного на некотором множестве И = О(.7).
Предположим, что имеется такой функционал Ф[ и,®]|, задан-
ный на множестве
И
хУ, что исходный функционал /[м] можно
представить в виде
[и] = зирФ[и, 5].
ФЕУ
Тогда поставленную вариационную задачу можно интерпрети-
ровать как минимаксную:
/. = ШЕЛ
м = Ш
иЕС
ЕО
зарФ[ы, ч].
(11.3)
%ЕУ
При этом оказывается, что функционал
По] = Ш Ф|и,5]
ЕП
является альтернативным по отношению к функционалу /м].
Это вытекает из следующего утверждения.
Теорема 11.1.
множестве ХУ, то
Если
функционал
Ф[Ги,%|
зир ШЕФ
и, %| < шЁзарФ|и, |.
ФЕУ иЕЦ
иЕЦ%ЕУ
определен
на
(11.4)
< Неравенство (11.4) очевидно, ссли сго правая часть равна, + оо
(это соответствуст случаю, когда при любом и © 0 функционал
Ф[и.%] не ограничен по $). Поэтому будем считать, что минимакс в правой части неравенства, равен некоторому числу М.
Для любых
Е И и® ЕУ\У
имеем
Ф[ и, | < зирФ[и, 5.
ъЕУ
Значит, и точные нижние грани по и связаны таким же неравенством:
ШЕФ[и, %] < ШЕзарФ[и, +].
чЕН
иЕОъЕУ
11.2. Построение альтернативного
Отсюда следует,
чен сверху
что функционал
числом
М = |
функционала
387
| = шЕ Ф[и, %] ограни-
чЕЙ
зирФ[и,%]|,
т.е. число М
является
иЕИвЕУ
верхней гранью
функционала
[|5].
Поэтому
зир 1%] < М,
так
ФЕИ
как точная верхняя грань — это наименьшая верхняя грань.
Последнее неравенство эквивалентно неравенству (11.4). №
11.2. Построение
альтернативного
функционала
До сих пор краевые условия, входящие в формулировку
вариационной задачи, рассматривались как ограничения на
область определения функционала.
Однако иногда удобно
трактовать вариационную задачу как задачу на условный экстремум, которая в самом общем виде формулируется следующим образом.
Пусть в гильбертовом пространстве 7{ задан функционал
Л[м] с областью определения Г)(.7), а оператор Ф[и] отображаст Р(Л) в некоторое полное свклидово (гильбертово или
консчномернос свклидово) пространство У. Требустся найти
минимум функционала Л[и| при условии Ф[ и] =0
(0 в данном
случае обозначает нулевой элемент евклидова пространства, )).
Другими словами, ищется минимум функционала, /[и] на мно-
жестве {ие 0(.7): Фи] =0}.
В случае гладкой задачи, т.е. если множество О(.) открыто,
а функционал
и оператор
дифференцируемы*,
решение
этой
задачи можно искать с помощью метода множителей Лагранжа,
Если и, — решение задачи, то при некоторых дополнительных
предположениях”* существует такой элемент % Е У, что элемент
‘и„ является стационарной точкой функционала Лагранжа
Ци,5] =
*Понятия
аналогичны
1.2.
**См.:
дифферснциала
Фрсшс
соотвстствующим
Алексеев
В.М.,
м] + (Фы|,
5).
и дифференциала
понятиям
Тихомиров
В.М.,
для
(11.5)
Гато для опсратора
функционала,
Фомин
С.В..
введенным
в
388
11. ДВОЙСТВЕННЫЕ
Оказывается,
что
ВАРИАЦИОННЫЕ
функционал
ЗАДАЧИ
Лагранжа
позволяет
мулировать задачу, двойственную к исходной.
вариационную задачу
Л]
шё
сфор-
Действительно,
Фи =0
(11.6)
поиска точки минимума и. функционала
вить как минимаксную задачу
Ли]
можно
предста-
Ли, | = шЁ зар Рич, 5]
(11.7)
иЕСчЕ»
для функционала, Лагранжа, Г[и,%]. При этом, если Ф[ и] 7 0, то
зир Ё[и,%] = +0. Значит, решение минимаксной задачи (11.7)
ФЕЙ
не может
достигаться на, элементе и„, для которого
Но если
Ф[]и] =0,
то Би,5] = Лм]
и решение
Ф[ и,| = 0.
минимаксной
задачи (11.7) совпадает с решением вариационной задачи.
Функционал Лагранжа, Г[и,%] (11.5) по отношению к функционалу /[и] иногда называют полным, а функционал /[и] по
отношению к функционалу Лагранжа, — частным. Если /[и] —
выпуклый функционал, удовлетворяющий условию /[и] — - со
при ||“|| —› со, тов (11.7) можно изменить порядок точных верхней и нижней граней*:
Л[и.|= шЕзар[и,5| =зир шЕ Ё[и,5] =зир
иЕО®ЕУ
ФЕУчЕЙ
[в] = Дъ,|,
(11.8)
ФЕУ
где
По] = шЁ Гы, 5].
(11.9)
ве
Отметим, что правая часть в формуле (11.9) может принимать значение —со. Разумно ограничиться теми значениями
и, для которых Г%| конечно. Это приводит к естественному
сужению области определения функционала, /[%| до нскоторого
подмножества (Г) су.
*См.:
Экланд
И., Темам Р.
11.2. Построение альтернативного функционала
Предположим,
что функционал
Г[и,%]
389
при любом
ие Б(Г)
достигаст минимума в сдинственной точке в, Е 0 = (Л).
гда. по существу,
на множестве
То-
Р)(Г) определено отображение
2, которое элементу ® ставит в соответствие элемент и, Е 0.
С помощью этого отображения мы можем записать
Пе] = ши, 5] =
$ (6),5] = [4 (0)] + (Ф(+4(®)), ®),
т.е. при известном отображении 4? альтернативный функционал Г[%| легко восстанавливается.
Однако отображение $
далеко не всегда удается получить в явном виде. Чаще всего оно
определястся некоторым уравнением, да и условис сдинственности точки минимума при фиксированном © выполняется не
всегда.
Тем
не
менее
связь
®
и
цы,
можно
учесть
в
выражении
для функционала, Лагранжа и тем самым упростить задачу построения альтернативного функционала / |9].
Если
функционал
/|м]
является
дифференцируемым,
то
уравнение для отображения $ можно искать с помощью метода,
множителси Лагранжа:
0.Ли, ды] + (0Ф[
и, ди], 5) =0,
Пример
11.1.
Рассмотрим
краевую
Ф(и)=0.
задачу для уравнения
„Латласа
Ди(%) =0,
ЖЕ",
(2) = 9(%),
хЕе5,
(11.10)
где 9(2) — известная функция, заданная на поверхности 5,
ограничивающей область У.
Эта краевая задача является частным случаем задачи, рассмотренной в примере 9.13. В этом примере для краевой задачи
построен функционал (9.41), который в данном случае сводится
к функционалу Дирихле
Л“ = 5 [| Фи?ау
У
с областью определения С\(У) ПС(У).
(11.11)
390
11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
Краевое
условие
и —9=0
на
5
можно
трактовать
как
условие Ф(и) =0, причем отображение Ф переводит функцию
цвЕС(У)ПС(У) в вектор-функцию (и — 9)® на поверхности
5 (здесь ® —
всктор
внешней
нормали
к поверхности).
Та-
ким образом, в качестве полного евклидова пространства У в
данном случае можно взять гильбертово пространство векторфункций на 5 с интегрируемым скалярным квадратом.
С
учетом этого полный функционал можно записать в виде
Ци, ®] = Ли] + (Ф(и), 5) = 5 | би?ау+ Де — 9)0па5 =
у
= 5 [ Фе?ау
5
+ | шота5-
у
|
5
тая.
(11.12)
5
Найдем вариацию функционала Ги, |:
и,
и, 94,0%] = [учбуичу
+ [(и—в)бота+
у
5
| этбий.
5
Отсюда, используя первую формулу Грина и полагая, что дУи =
= У(6и), получаем
Ци,
и, 0,0%] = — [ либыау
+
у
+ [м -9)б5таб+
5
|| (о +Ущтбиаб,
5
Из условия стационарности 9 Ри, дл, и, 9%] = 0 полного функционала, при произвольных вариациях ди в У ид
на 5 следует,
что Аи=0вУии-—9=0на 5, т.е. в стационарной точке полного функционала должны быть выполнены равенства
(11.10).
Но
помимо этого получаем дополнительное условие связи между и
из: и-+ Уи = 0 на 5, или
\и(%) = —%(%),
ЖЕБ.
(11.13)
11.2. Построение альтернативного
функционала
391
Условис (11.13) позволяст построить непрерывное продолженис всктор-функции %(х), определенной на поверхности 5,
в область У согласно формуле ®(ж) = —Уи(т),
жЕУ. Учитывая это продолжение, находим по формуле Остроградского —
Гаусса,
[шотав = | авубиьуву = | офиау
5
у
+ [хочу
у
у
Используя это равенство, а также условис связи Уи = -%
представлении полного функционала (11.12), получаем
Пизе] = 5 |
иду
+ [ оУча
=5
/
1
данном
лишь
случае
при
Уу(2)
С
учетом
этого
видно,
из
(11.14)
5
что
точная
нижняя
грань
по
6
условия
= Ч (ж}
условия
=
— | вота5.
у
выполнении
лтаз
5
+ || «Хову
у
В
|
у
[ау
=
5
+ [иуоау
У
5
— [ут
у
ау — [ау
у
конечна
+ | иуоду
у
;
в
=0,
(11.14)
жЕУ.
получаем
(11.15)
представление
альтернативного функционала, Г]:
Пу] = аа]
= =
| ?ау - |
У
5
таз.
(11.16)
392
11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
Его областью определения О(Т) является множество непре-
рывно
дифференцируемых
в области
У функций,
удовлетворя-
ющих условию (11.15).
Пример
11.2.
Построим функционал,
функционалу „/[и]| (9.50) из примера 9.14.
альтернативный
Областью определения функционала, „/[и| является линейное
многообразие С\[а, в] в гильбертовом пространстве Ё2[а,6]. Его
минимум ищется при краевом условии и(а) = а (второе условие
учтено в самом виде функционала).
Таким образом, в данном
случае Ф[и| = (а) — а, причем оператор Ф переводит функцию
и(т) в число и(а) — а, т.е. является функционалом. Значит, в
качестве евклидова пространства \ следует взять одномерное
арифметическое пространство В! со скалярным произведением
(т, у) = ту. Используя условие связи, можем записать
Ци,®] = 4+
(Ф|ц]|, °) =
ь
= — Ви нм ХР
+
ь
из)
[ве [пели
дон
9 (2) ат
(6)
|| ходи
Найдем первую вариацию функционала,
вольных вариациях 6и(1} и ду:
а)
(11.17)
(11.17)
при произ-
Ь
би,
би, 6%] = —Вби(в) + ие) би’ (т) ах —
а
ь
- [
а
ь
пеубивуае+ [офи вида +
а
+ 3(и(6)) би(Б)+ (и(а)
— а) бо + оби(а).
11.2. Построение альтернативного функционала
393
Отсюда, интегрируя по частям, находим
ь
би,
о, би, 6%] = —Вби(в) + и (т) би(4)
о [м одбщда» =
а
6
=
6
[1 )64(1)
ат + чб
)) би (=) ат + з(и(Ъ)) би) +
+ (и(а) -а) де + ибща) = [и (6) +3(и(5)) — В] би(Ь) +
ь
+ [[-ибодчна(ы) — Ге] дидаь+
+ (и (а) -а)бь + (ии (а)) ща).
Из необходимого
условия
экстремума
0Ё[и,0,ди,0%| = 0, кото-
рое должно выполняться при произвольных вариациях ди(х)
и 6%, следует, что в стационарной точке полного функционала верны все равенства (9.9), (9.10). Но помимо этого имеет
место равенство и =
(а). Рассмотрим функцию %(5) = и'(т),
которую
можно
интерпретировать
как продолжение
значения
и =5(а) на отрезок [а, 6]. Согласно правилу интегрирования по
частям,
и(а)ь (а) = в) — ] иедат
и(=)
т
и(ь)
и (6)
Г. 8(и) Чи =
0
| иеуь (г) аа
и(т)
о
3(и(
И
[|= и) аи.
0
6
394
11. ДВОЙСТВЕННЫЕ
Используя эти тождества,
(11.17) получаем
ВАРИАЦИОННЫЕ
& также равенство %(х} = и (5), из
ь
пль
= -Вщы+
ЗАДАЧИ
2
|
ь
а»
|| гадыбдат+
6
+ [5(6) + 8(и(6)) В] (5) — Да
а
—
2)
] ид’(и) аи —
0
[ды
0
- вое).
(11.18)
Точная нижняя грань полного функционала (11.18) конечна,
если выполняются условия
—и' (=) +4(и(2)) - 1(2)=0,
ге [а
5(6) + 3(и(5)) -В=0.
(11.19)
В этом случае функционал Г/[и,5] можно записать в виде
ь
Ци,
= -5
[дат
56
[а
г
(т)
] ид’ (и) аи -—
5
— ] ч8' (и) ди — би (а),
(11.20)
11.3. Оценка погрешности приближенного решения
а альтернативный функционал
ь
- [+
и(т)
СХ
о
395
/[%|] — в виде
и(6)
и) аи — Де
0
и ми
ибо)).
Е
11.3. Оценка погрепности
приближенного решения
Пусть {им} — минимизирующая последовательность
дратичного
ква-
функционала
Зи] = мА — 2(Д, и),
(11.21)
соответствующего краевой задаче для операторного уравнения
Ами = } с положительно определенным оператором А. Различие между приближенным решением им и обобщенным решением и, операторного уравнения, на котором этот функционал
достигает своего наименьшего значения „Л, [и„] = —||м..|2 =4
(см. 10.1), можно оценить по разности значений функционала,
на
этих
решениях:
АЛал] =
ам -
Ми] = Лам - 4.
(11.22)
Если обобщенное решение и, принадлежит области опреде-
ления оператора А, т.е. является классическим решением, то мерой погрешности приближенного решения #м может служить
норма ||Аим — }||д его невязки. Так как для классического решения Аи, = }, то, полагая и = им — и., согласно теореме 10.3
396
и
11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
неравенству
Коши
(Ам, и)
(и, и)
О<л<
—
Буняковского,
можно
< |Ащ м]
=_
[м
—_ МА
— м»)
|| м — м»|
где А —
сюда
написать
наименьшее
собственное
значение
Аим
— ЛИ
[м — м» °
(11.23)
оператора, А.
| А(йм —м,)| ;
[9м —м„|| <
А
От-
(11.24)
т.с. норму разности между приближенным и обобшенным решсниями на самом деле можно оценить с помощью нормы невязки.
В гильбертовом пространстве /,2(9) неравенство (11.24) принимает вид
вн) и, (2)
[4
< ) Плаха) —ЭРаю,
(11.25)
О
т.е. речь идет
приближенного
об оценке среднеквадратичной погрешности
решения в области 0.
Отметим, что для
гарантированной оценки сверху этой погрешности необходимо
использовать оценку наименьшего собственного значения снизу
(см. 10.4).
Отметим, что при построении минимизирующей последовательности для функционала Л. [и] с помощью метода Ритца
условие |Аим- /||
0 при М -+ со выполняется лишь тогда,
когда все функции и в представлении (10.15) являются собственными элементами оператора А. В противном случае
оценка (11.25) может оказаться слишком грубой.
Применение методов наименьиих квадратов или Куранта для построения минимизирующей последовательности обеспечивает
Ачл-Х)||
—0
при № — со в случае произвольного
счетного
базиса в энергетическом пространстве 7{д, составленного из
функций и Е )(А), что делает оценку (11.25) более точной.
11.3. Оценка погрешности приближенного ретения
397
В более общем случае погрешность приближенного решения,
построенного с использованием счетного базиса, включающего
функции и не только из 2)(А), приходится оценивать по значению разности (11.22). Так как в энергетическом пространстве
На для положительно определенного оператора (Ам, и) = ||м | д,
то вместо (11.23) с учетом (10.6) при и = им — и» запишем
<<
[мА
—
ем
м
— 4
|
— Лам]
вм
- мы
—
8 [м
|2
— м ||?
Отсюда получаем
| — м. | < уе
ы < уе
“(11.0
Это верно, в частности, и для пространства, #4 = Г.2().
Точно определить минимальное значение 4 квадратичного
функционала удается редко. Однако если построена неубывающая последовательность {4}, сходящаяся к 4, то Л,
им|-а<
< Л, им| — 4» и вместо (11.26) можно использовать более грубую оценку
ал] а
1им—
Как
и в случае
м,
(11.25),
|
из
<
4
(11.27)
(11.27)
А
следует,
что
для
количе-
ственной опенки погрешности необходимо располагать оценкой
снизу значения А.
Строить последовательность {4т} можно различными способами. Один из способов состоит в построснии функционала
1], двойственного функционалу Л,[м| и достигающего на некотором элементе %„ своего наибольшего значения Г%,| = 4.
Тогда можно
построить
последовательность
{4}
приближсн-
ных решений 4и вариационной задачи для функционала Г],
которая сходится к 4 снизу, не убывая.
Пример
11.3.
Ци
В примере 11.1 построен функционал
-5 |
У
ау
— [ ботаб,
5
(11.28)
398
11. ДВОЙСТВЕННЫЕ
двойственный
ВАРИАЦИОННЫЕ
ЗАДАЧИ
функционалу Дирихле
1
Ли] = 5 [| Фиау
(11.29)
ы
Оператор А = —А в краевой задаче (11.10) не является симметрическим (см. пример 9.13). Тем не менее в этом случае
для оценки погрешности приближенного решения краевой зал
дачи (11.10) можно применить оценку, аналогичную (11.26).
Действительно, используя первую формулу Грина и полагая и =
= им — и„, преобразусм разность:
_
т
Лак - Ли.| = >| [(У@к)? — (Уи,"| ау =
у
1
_
=5 [пы
т
— Уи.) УааУу + 5 ] (Уим — Уи,) Уи, АУ =
у
=5
у
1
оО
1
Уи\Унау + 5
у
—5
—
Г.
Уи Уи. АУ = 5
иУуит45 —
у
|
[ #Авау т || ун-та
— || пан.Чу
у
= —>
У
[ плечу,
Ра
поскольку п = 0 на би Ди, ЕО ВУ.
Пусть оператор А ссть оператор
—А,
рассматривасмый
на множестве функций (2) Е С?(У) ПС(У), удовлетворяющих
краевому
условию
и =0
на
5.
‘Тогда
этот
оператор
симметрическим и
1,
Ти
-5 | плаау
= 5 (ла. п),
_
ве
р
О(А).
у
В силу теоремы 10.3 имеем
<
@щ%
[бум |? °
будет
11.3. Оценка погрешности приближенного
где А! — наименьшее собственное
оператора А. Отсюда получаем
значение
—
У м
решения
399
симметрического
—а
А!
Если {4и\ строить как минимизирующую последовательность
функционала —Г $], обратного по знаку функционалу (11.28),
то для гарантированной оценки погрешности приближенного
решения краевой задачи (11.10) можно использовать оценку
[м
— м, || =
У (“|
—
о}
Фи
которая аналогична, оценкс (11.27).
Пример 11.4. При некоторых дополнительных предположениях оценку погрешности приближенного решения им, анал
логичную (11.27), можно использовать и в нелинейных задачах.
В примере 9.14 построен функционал (9.50)
$
р
2
Ли = Ви) + ] Ме,
"
Ь
ат +
] Е(а)и(в)
",
вре
% (5)
и (5%)
чебмня
|
хвои
а
соответствующий нелинейной краевой задаче (9.9), (9.10). Условием выпуклости этого функционала является неубывание
функций 9(и) и (и) (см. пример 9.19).
Пусть этот функционал достигает своего наименышего значения /[и„| на элементе 4. (5) е Р(А), удовлетворяющем (9.9),
(9.10), т.е.
— (=) +4(и„(1)) = 1(#),
и, (а) =а,
1е[а,5)
_
щ, (6) + 3(и=(5)) = В.
(11.30)
400
11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
Обозначив (15) =им(х) — и.
лов:
(1), запишем разность функциона(
Вах)
Л [и.]|
Лам|
|
+
м.)
,( уу?
в
и. (т
новь
а
5(и)аи =
аи) ди +
и» (5)
ин(т)
@
=
(
йм (6)
— [349 (буб- и.) ах-+ | ах
"
))*—
-
е
ь
ф
у (
И
6
им)
[
]
им (5)
4(и) аи -
]
8(и) аи.
и+ (в)
94» (2:)
Заменим в двух последних интегралах 4(4) и 3(и) соответственно на 4(и,(2)) и (и. (5)). Для нсубывающих функций 4(и) и
8(и) это не приведет к возрастанию правой части последнего
соотношения. Тогда, интегрируя по частям и учитывая соотношения (11.30) и равенство (а) = 0, находим
Ь
Лам] — Ли.] > — ВВ) + 5 [ ата
а)
ь
+
а
| ше (в)р
=
,()) паж + 8 (и, (6) (6) =
Вопросы и задачи
401
Выпуклый функционал
ь
РЫ = / (ие
достигает некоторого наименьшего значения А° на замкнутом
ограниченном множестве И функций и(<) Е С'[а, 6], удовлетворяющих краевому условию (а) = 0 и условию |||; = 1, так как
этот функционал
непрерывен
по норме
1-15.
Этот
минимум
является решением задачи на условный минимум функционала,
Е] при условии |и|у, =1. Решая эту вариационную задачу
методом множителей Лагранжа (см. теорему 4.3), заключаем,
что функция %0(1), являющаяся точкой условного минимума,
удовлетворяет дифференциальному уравнению и = Ао (уравнение Эйлера для лагранжиана задачи) и краевым условиям
(а) =0, м’(5) =0
(условие трансверсальности). Другими словами,
А° есть собственное
значение симметрического
тельного оператора А[и| = —и",
функций
определенного
и(2) Е Са, ], удовлетворяющих
положи-
на множестве
краевым
условиям
(а) = и (6) =0. Ясно, что А — это наименьшее собственное
значение оператора, А, которое нетрудно определить: А? = 12/4
[ХП. Таким образом,
#2
212
А = шш Р[4| = шт Ш | < Ш
Па
ото м
о |9
<
=
Лем
[2х]
Лч
[4]
[ам
— мн]
где минимумы ищутся на множестве функций (5) Е Са,6,
для которых (а) = 0. В итоге получаем
[ем — мы [| =
Вопросы
и задачи
11.1. Построить функционал, двойственный
(9.31). переходом к полному функционалу.
функционалу
402
11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
11.2. Сформулировать задачу на собственные значения для
нахождения числа Л в (11.27) при использовании вместо „Л, [и]
функционала (9.31).
11.3. Построить функционал, двойственный
(9.42), переходом к полному функционалу.
функционалу
11.4. Сформулироватъ задачу на собственные значения для
нахождения числа А в (11.27) при использовании вместо „Л [и]
функционала (9.42).
ЧАСТЬ
ТУ
Приложения
вариационных методов
С тех пор, как существует научная физика, высшей целью, мерцавшей перед нею, было разрешение задачи
каю обобщить все явления
природы, наблюдавшиеся в прошлом
и мозущие бъить наблюдаемыми в будущем, в одном простом принципе...
Эта цель и сегодня не достигнута; она не будет достигнута пол-
ностью
и в будущем,
природе
вещцей,
приближаться
можно.
но
что
лежит
все более
к ней —
вполне
М.
в
и более
воз-
Планк
12. ПРИНЦИП
Механической
ных
точек,
системой
в которых
ГАМИЛЬТОНА
называют
положение
множество
каждой
точки
материаль-
зависит
от
поло-
жения и движения остальных точек этого множества.
Условия,
ограничивающие
связями.
движснис
точек
систсмы,
называют
Связи могут записываться в виде уравнений или неравенств,
которым подчиняются координаты положения и скорости точек системы.
Рассмотрим механическую систему из и материальных точек с массами ти, т2, .... Та и координатами положения
т; = (тр и. #),
1=Т.п,
заданными
в некоторой
декартовой
прямоугольной системе координат.
Предполагаем, что связи
в рассматриваемой мсханичсской системе имеют вид
Ито
ть
Ри)
= 0,
=
К.
(12.1)
Если функции ]; на самом деле от скоростси ?; материальных
точек не зависят, то соответствующие связи называют голономными.
Кинетической энергией механической системы из я точек
называют величину
1
у
Т = 7] > тот,2
=!
где и; =Т; = (2, %, 2)
—
вектор
(12.2)
скорости
1-й материальной
точки.
Движение
стью
сил.
механической
Пусть
на 1-ю
систсмы
вызывастся
материальную
точку
совокупно-
системы
из п
точек действует сила Ё.
Если существует такая функция
И(т) =0(1.9,2), что сила, Е; может быть представлена в виде
Е; = отаа0 (т;), то эту функцию
называют
потенциалом сил, а
противоположную ей функцию У (г) = -И(г) — потенциальной
406
12. ПРИНЦИН ГАМИЛЬТОНА
энергией механической системы. Сумма кинетической и потенциальной энергий механической системы представляет собой
полную энергию этой системы.
Если в процессе движения
мсханической системы се полная энсргия не изменяется, т.с.
Т+У =Т- 0 = соц, то такую механическую систему называют консервативной.
Если связи (12.1), наложенные на систему, являются голо-
номными, причем функции }; функционально независимы, или,
другими словами, ранг матрицы Якоби систсмы функций };,
1=1.
А, максимален и равен К, то система уравнений (12.1)
может
быть локально
переменных.
разрешена
Тогда остальные
относительно
каких-либо
3й — К переменных
могут
к
сво-
бодно меняться, полностью определяя положение механической
системы. В этом случае говорят, что механическая система
имеет 3 — К степеней свободы.
ющихся
(лагранжевы)
мы.
Эти т = 3, — К свободно меня-
переменных могут рассматриваться
координаты
как обобщенные
41, 42, ...; 4т механической
систе-
Конкретное положение механической системы будет опи-
сываться
набором
значений
обобщенных
координат
и может
интерпрстироваться как точка в нскотором 7й-мерном фазовом
пространстве Е. При этом движение механической системы бу-
дет изображаться некоторой кривой, которая параметрически
описывается вектор-функцией (41(#), ..., 9т(®)). Производные
4(®) лагранжевых координат по времени называют обобщенными
скоростями
механической
системы.
Итак, механическая система из » материальных точек изображастся точкой в т-мерном арифметическом пространствс,
которое мы будем считать евклидовым со стандартным скалярным произведением. Любому движению системы из положения
А(910; --., 9то) в положение В(41,
..., 9ту) соответствует кри-
вая 9(1) = (9%, ..., 9т(0)), (Е №, Н], для которой 4;(№) = 45,
а(Н)=4ал.+=1, п.
Все гладкие кривые в пространстве обоб-
шенных координат, проходящие через данные точки Аи
В,
будем называть возможными траекториями, а ту из них, по
которой происходит движение системы под действием приложенных сил, — действительной траекторией.
407
Пусть механическая система потенциальна и, вообще говоря, неконсервативна. Функцией Лагранжа, механической системы называют функцию
Г=
Г(ь
а, а)
ЕТО,
а действием по Гамильтону
ческой системы — функционал
/
для рассматриваемой механи-
И
5[а] = / Г, 4,4) 4,
заданный на всех возможных траекториях системы.
Согласно принципу Гамильтона, среди возможных траекторий движения системы действительной является та,
которой вариация действия по Гамильтону равна, нулю:
на
й
59а] = 5( ] ея) а) —0,
в
Другими словами, действительная траектория является стационарной точкой действия по Гамильтону.
Итак, для того чтобы найти траекторию движения механической системы, вызванного приложенными к системе внешними силами, нужно определить стационарные точки функционала, называемого действием по Гамильтону. Но точно так же
решается простетицая задача варцациюнного исчисления
Н
течьдуй
сх,
4(%) =9,
9(8)= 9,
(12.3)
ю
где
4
=
(410,
+)
Что};
Ч
=
(ат,
т:
Экстремали вариационной задачи
системы уравнений Эйлера
а
974 —=0,
Чт1);
(12.3}
4(1)
Е СЮ,
ишутся
_
1=Ът,
как
Н.В”).
решения
(12.4)
408
12. ПРИНЦИН
ГАМИЛЬТОНА
удовлетворяющие краевым условиям вариационной задачи. Система уравнений (12.4) в теоретической механике известна, как
система уравнений движения в форме Лагранжа.
Замечание
12.1.
Изложенный
прицип
был
опубликован
В. Гамильтоном в 1834-1835 гг. в случае стационарных, т.е.
не зависящих от времени связей.
Независимо от него и в
более общем случае нестационарных неголономных связей этот
принцип был сформулирован М.В. Остроградским в 1848 г.
Поэтому иногда в литературе принцип Гамильтона называют
принципом Гамильтона — Остроградского.
3
Хотя
в принципе
Гамильтона
характеризуется как стационарная
ствия по Гамильтону), заданного
действительная
траектория
точка функционала,
на
множестве
(дей-
возможных
траекторий на общем промежутке времени [ц,#| с общими
концами А и В, в ряде случаев по смыслу рассматриваемой прикладной задачи ясно, что действительная траектория является
и точкой минимума рассматриваемого функционала, а поиск
дсиствительной трасктории фактически эквивалентен решснию
простейшей
задачи
вариационного
исчисления
(12.3).
В
таких случаях принцип Гамильтона сводится к принципу наименьшего действия.
Пример
ящую
12.1.
Рассмотрим
из единственной
точки,
мсханичсскую
движение
систему,
которой
состо-
подчиняется
голономной связи 22 + у? + 22 = Я?, где т, у, х — текущие координаты этой точки. В этой системе точка, перемещается по
сфере. Если внсшние силы отсутствуют, то потенциал сил (7
можно считать равным нулю и действие по Гамильтону имсот
вид
409
где т — масса материальной точки; ® — вектор скорости точки в текуший момент времени.
Можно показать*, что при
отсутствии внешних сил движение идет с постоянной по модулю скоростью
(|| =0 =50 = 0186), а траекториями
будут дуги больших кругов на сфере.
мильтону можно записать в виде
Е_
пд
2
движения
Значит, действие по Гал
(нь).
Для любых фиксированных точек А и В на сфере можно
указать две дуги большого круга, соединяющие эти точки. Каждая из них, как отмечено, является действительной траекторией. Меньшая из них дает минимум действия по Гамильтону, а
большая — максимум, так как при фиксированном промежутке
времени однозначно определена постоянная скорость, с которой
материальная точка должна двигаться по траектории, причем
эта скорость пропорциональна длине траектории.
Итак, не
всякая действительная траектория обеспечивает минимум действия по Гамильтону.
Отметим частный случай, когда точки А и В диаметрально
противоположны. В этом случас сушествуст бесконсчно много
действительных траекторий, соединяющих эти точки, причем
среди таких траекторий можно выбрать сколь угодно близкую
к некоторой заданной. В теоретической механике такие точки
называют сопряженными кинсматическими фокусами.
Если движенис на сфере ограничить некоторой областью О,
не содержащей диаметрально противоположных точек (сопряженных кинематических фокусов), то любая экстремаль будет
давать минимум действия по Гамильтону.
Значит, принцип
Гамильтона в малом (т.е. локально) становится принципом наименьшего действия.
*См., например:
Бухгольц
Н.Н.
13. КОЛЕБАНИЯ
ной
СТРУНЫ
Простейший пример механической системы с распределенмассой — струна или стержень.
Струной (нитью) на-
зывают тело, у которого поперечное сечение намного меньше
длины (одномерное тело) и которое сопротивляется только нал
тяжению.
Струна
однородна,
если плотность
материала,
из
которого она, изготовлена, постоянна.
Пусть в нскоторый начальный момент времсни струна под
действием натяжения № приобрела длину [ и располагается в
прямоугольной системе координат Оху вдоль оси Ох, хЕ
(0,1),
концы ее закреплены в точках (0, 0) и (1, 0).
Поперечные
малые колебания струны можно описать функцией и = и(х,%),
значение которой 1+(5,$) есть отклонение вдоль оси Оу точки,
имеющей в положении равновесия координаты (х, 0). При этом
(т,1)
[4 (7,4)
(0,1). Кинетическая
энергия элемента длины струны равна @Г = 5 2(и+)? аж, где р —
линейная плотность материала. Поэтому кинетическая энергия
колеблющейся струны выражается формулой
т
ВИ
1
[| р(ие,ву 4х.
0
При колебаниях длина струны меняется на величину
р
м =
Сила
длины.
*См.:
|
о
Уго
натяжения
Согласно
Работнов
совершает
теореме
Ю.Н.
=
1
работу
Клапейрона”,
р
[>
и) ат.
о
на этом
вклад
приращении
внешней
силы
411
№
в потенциальную
энергию
с учетом
ее
постоянства
равен:
|
=> ] (и) 4
0
Согласно принципу
функционала,
Гамильтона,
я
и
9 = [@-иу)а и
о
ишем
стационарные
точки
а [сы
р(ш? — М) а =
0
И
= [лем
ве
п
где
= (фи ми!) = 5 (ри — №(и,)?) — интсгрант функционала; @ = [0,Цх №,11|.
В качестве допустимых рассматриваются все непрерывно дифференцируемые функции %(х,%),
обращающиеся
в нуль при д =0ит=ра
при? =Б5
совпадающис с заданными функциями (7,0) ии(т,&
ственно
(эти функции описывают
форму
и
= И
) соответ-
струны в начальный
и конечный моменты времени).
Уравнение свободных колебаний — это уравнение Остроградского для функционала 5[и], которос в данном случас имсет вид
9
Ри
д
+ и,
-Л=0.
Подставляя в него конкретный интегрант, находим
риии — Мишаи = 0.
(13.1)
Пусть на струну действует поперечная нагрузка интенстивности р(л,1). Ее работа на поперечных перемещениях точек
струны равна:
р
А-
| Кобще
р
ат.
412
13.
КОЛЕБАНИЯ СТРУНЫ
Струна, распрямляясь, совершит работу, отличающуюся знал
ком от работы А внешней нагрузки. Следовательно, дополнительная потенциальная энергия равна:
1
— | речи
(ах.
0
Записав
действие по Гамильтону
$ = Да-ущ= ] Дори
= ум
+ т) Чт,
находим уравнение Остроградского этого функционала:
ри
= Мила = р(т, 9,
(13.2)
которое представляет собой уравнение вынужденных колебаний струны.
Положение устойчивого равновссия* под действием статической нагрузки
получим,
решив
Ум = (мы
вариационную
(ии)
задачу
4х > пт.
Соответствующее уравнение Остроградского, представляющее
собой уравнение равновесия, имеет вид
Ми, + (т) = 0.
Это
при
уравнение является частным случаем уравнения
условии, что ускорение и" тождественно равно
а распределение
внешней
(1,1) = р(2).
*См.:
Вольмир
А.С.
нагрузки
не зависит
от
(13.2)
нулю,
времени:
14. КОЛЕБАНИЯ
МЕМБРАНЫ
Мембрана — это материальная поверхность (пленка), которая не сопротивляется изгибу и сдвигу.
Пусть мембрана
натянута на плоский контур Г, охватывающий область С в
плоскости хОу. Рассмотрим поперечные колебания мембраны,
в которых перемещение и(т,у,#) каждой точки (т, у) Е С перпендикулярно плоскости хОу.
Пусть 4 — элемент некоторого контура на поверхности деформированной мембраны. На этот элемент действует усилие
Т,
где вектор Т вследствие отсутствия сопротивления изгибу
и сдвигу лежит в касательной к поверхности плоскости и перпендикулярен (1, а его модуль Т представляет собой величину
натяжения мембраны. Предполагая, что мембрана, подвержена,
малым колебаниям, т.е. |и(т,у.1| намного меньше размеров С,
а [м„.|, |м,| много меньше единицы, мы можем пренебречь вторыми и более высокими
степенями частных производных,
так
как, например, [1.2 < ||, ||? < му.
Натяжение Г(5,у,1) во всех частях мембраны одинаково, т.е.
Т(т,у,ф =То = с0п8ё. Считаем, что материал мембраны обладает линейно упругими свойствами. Тогда потенциальная энергия
деформирования
мембраны
пропорциональна
приращению
площади ее поверхности, причем коэффициент пропорциональности
равен
натяжению.
Это
можно
показать,
выделив
диф-
ференциальный элемент площади и подсчитав элементарную
работу сил натяжения, затраченную на его деформирование.
Площадь 5 поверхности деформированной мембраны вычислястся по формулс
5=
|] АИТ
[
(4,2 + (в)? атау,
414
значит,
14.
приращение
КОЛЕБАНИЯ МЕМБРАНЫ
площади
равно:
48= Г ее
У (и
вы У (з
шага.
Отсюда находим величину потенциальной энергии деформированной мембраны:
У-ТАя-©> |
аду.
(14.1)
Пусть на мембрану действует поперечное давление }(х,у).
Тогда, элементарная работа, затраченная на перемешение элемента поверхности 4х4у на расстояние ц(1,у,1),
= Гидтау, а вся работа выражается интегралом:
-/]
равна:
дА =
иахау.
Предположим, что контур Г мембраны удерживается
упругими пружинами с модулем упругости с и может
шаться только вдоль оси 07. На контур действует
распределенная нагрузка р(1), направленная вдоль Оз
мящаяся удержать контур в положении равновссия.
суммарная работа упругих пружин равна:
1
г
Аш = —5 $ си? а],
Г
а, работа распределенной нагрузки р(1) есть
дб) = — фра.
г
линейно
перемевнешняя
и стреТогда
Кроме
перечисленных
них сил на контур
внеш-
действуют
си-
лы натяжения Т’а{. Их составляющая Т, вдоль оси Ох совершаст
работу по перемещению контура,
(рис. 14.1). Вычислим эту составляющую:
Г, = Тзша = Та
= г.
дп,
где ры
производная 1 по направлению внешней нормали п к
контуру Г.
Таким образом, потенциальная энергия У упругой системы
мембрана — контурные пружины может быть записана в виде
у // (5 (м + 2) = ода
+ Коби еб тои).
Г
Если пренебречь массой контурных пружин, кинетическую
энергию мембраны можно записать в видс
`
.
КУ 1 | [ден
"с
где р = ро = с01$$ — поверхностная плотность мембраны.
Для
вывода
уравнений
движения
мембраны
используем
принцип Гамильтона, согласно которому действие по Гамильтону на функции и(т,у,Р), описывающей реальное движение
мембраны, т.с. функционал
8 =
й
вю
4
ВЕК-И,
416
14.
КОЛЕБАНИЯ МЕМБРАНЫ
имеет нулевую первую вариацию: 05[и,ди] =0. Другими словами, функция и(т,у,{) является стационарной точкой функционала
ий
(р) = ыав
] { | (зем — Зы
ю
[е)
ри 5 (и? они) Ци
-
(14.2)
Г
Вычисляя вариацию этого функционала (см. 2.4) и приравнивая ее нулю, получаем уравнение колебаний мембраны
То
5 (иль + ми,) + (ту) = рии
и
естественные
краевые
(14.3)
условия
Триди рей
=0,
(14.4)
Если речь идет о закрепленной по контуру мембране, то
контурный интеграл в (14.2) равен нулю и естественное краевое
условие (14.4) заменяется заданным краевым условием и. = 0.
При использовании принципа Гамильтона мы считаем, что
допустимые функции имеют заданные значения в моменты времени
ций.
Однако в задачах динамики задают только началь-
ное состояние, т.е. ститают известными и(12,
у, 0} и (т,
у, Ю).
Таким образом, эти задачи относятся к задачам смешанного
типа: ставятся и красвыс, и начальные условия.
Поставим задачу о статическом нагружении мембраны. Из
уравнений (14.3) и (14.4), приравнивая нулю производные по
времени, получаем
(14.5)
417
Эта
задача
проедставляст
уравнения Пуассона, [ХИ].
высокой
жесткости
собой
красвую
задачу
Ш
рода
для
Если с велико (это соотвотствует
пружин),
то
во втором
уравнении
можно
пренебречь производной по направлению нормали. В этом случае получаем краевую задачу Г рода (задачу Дирихле). Если
же с мало, так что можно считать, что с = 0, получаем условия свободной границы.
Это краевая задача П рода (задача
Неймана). Задача Неймана имеет не единственное решение, решение будет зависеть от аддитивной постоянной, отражающей
начальное состояние мембраны. Кроме того, в случае краевых
условий П рода равновесие возможно только тогда, когда, суммарная сила, действующая на мембрану, равна нулю:
[очаги
а
фр
= 0.
Г
О способах интегрирования уравнений движения (равновесия) мембраны см. в [ХПИ].
15. УРАВНЕНИЯ ДВИЖЕНИЯ
ИДЕАЛЬНОИ ЖИДКОСТИ
Рассмотренный ранее принцип Гамильтона можно обобшить на случай неконсервативной и неголономной системы.
Функция Лагранжа, определяется равенством
$=Т-У=тТ+О,
где Ти У — соответственно кинстичсская и потенциальная
энергии механической системы. Принцип Гамильтона можно
записать следующим образом:
й
95 = [ети
0
(15.1)
р
Если в подынтегральном выражении (15.1) второе слагаемое 00, представляющее собой вариацию потенциала, действующих
на
систему
сил,
заменить
величиной
ъ
6А=У` 9:94,
1=1
выражающей элементарную работу непотенциальных сил через
обобшенные силы (©); и возможные обобщенные перемещения
64;, то получим обобщение принципа Гамильтона, на, неконсервативные
системы*.
Вычислим
интеграл
от
вариации
кинети-
ческой энергии:
Н
.
т
я
.
еаиеоьофонибда=
то
п
>.
я
ОТ
96
4)
п
ЭГ.
|
(ря
то
|
отб
1=1
п
от
( ^— Эа;
ког.
4:
от
>. 96;
4)
о
так как в данном случае вариации изохронны и д = 0.
“См.:
Бутеольц
Н.Н.
(
)
419
Преобразуем второе слагаемое в (15.2) с помощью интегри-
рования по частям:
> Ура (руы
,
й
Н
,
п
й
= -/ Ув)
=
ю
Ю
учитывая, что начальное 4(%) и конечное 4(#Н) положения механической системы фиксированы и вследствие этого да(®) =
= ба(н) =0. Поэтому
|
Из уравнения
(15.3)
(= - @(5) +9 ) 94:41 = 0.
(15.3) вытекают
уравнения
движения
некон-
сервативной системы с я степенями свободы, если учесть, что
промежуток интегрирования произволен, а вариации д4; нсзависимы.
Оказывается, что принцип Гамильтона в форме (15.3) спра-
ведлив и для систем с линейными неголономными связями. При
этом из вариационного принципа можно получить не только
уравнения движения, но и краевые условия.
Пусть жидкость несжимаема. При движении такой жидкости любой выделенный сс объем не изменяет свосй величины
(хотя и меняст форму}.
Выберсм
некоторый объем АЯ и рас-
смотрим возможные перемещения 07” его точек.
ДОЛЖНЫ
сти:
сти
быть
таковы,
что
выполняется
условие
Перемещения
несжимаемо-
д9’-до = 0, где АО’ — величина объема АО жидкоф=
АО
.
после
перемещения.
Так
как
ф<ф=
Фу
т,
др = дуг = удт =0.
то
(15.4)
420
15. УРАВНЕНИЯ ДВИЖЕНИЯ
ИДЕАЛЬНОЙ ЖИДКОСТИ
Рассмотрим идеальную несжимаемую жидкость, на которую, возможно, воздействуют неконсервативные силы. Принцип Гамильтона, можно записать в виде
и
[а
[т+54) а =0,
ИО
(15.5)
о
где бГибА — вариации кинетической энергии Ти работы А,
приходящихся на единицу объема. Так как работа внутренних
сил в любом объеме жидкости равна нулю (вследствие того, что
она идеальна), то бА есть работа только внешних, например
массовых, сил К’, т.е. бА = Кбг.
Итак, ставится задача о стационарности действия по Гамильтону при дополнительном условии (15.4).
Используя
метод
множителей
Лагранжа,
и
[ И [ (Тб + вр)
о
получаем
0.
(15.6)
[о]
Здесь все подынтегральные величины отнесены к единице объема.
Так
как Т = оо,
рость есть полная
щения г. Поэтому
то 9Т = риди.
производная
<
так как бт() =дт(Н) = 0.
по времени
_ 4(6т)
Действительная
от вектора
ско-
переме-
421
Далее,
учитывая
ми операциями
формулы
векторного
связи между
анализа,
дифференциальны-
находим
Адф = Ау дт = ам (Лдг) — отаа Л .дт.
По теореме Остроградского — Гаусса
лаб»
О
а = (ах)
О
— втаал. 6") а =
= — [ зах. дн+
О
деп.
у
Используя проведенные выкладки, получим
и
[а
0
[@т+5А+ Ад) 0 =
[2
ня
р
= [а | (ртр + К — вал) 50+
уй
®
о
[А
+ [4
в
Адт- па
=0.
(15.7)
р
Чтобы это равенство было верным, достаточно, чтобы обращалось в нуль каждос слагаемос.
Смысл множителей Лагранжа в случае мсханических систем
состоит в том, что эти дополнительные неизвестные заменяют
уравнения связей и на самом деле отражают ответные воздействия связей на систему, т.е. характеризуют реакцию связей.
При выделении объсма, идеальной жидкости связи проявляются как воздействис на выделенный объем „остальной“ среды.
А это есть нормальные давления на, поверхность выделенного
объема, т.е. АЛ =р.
После введения множителя А перемещения 07 становятся свободными. Поэтому, приравнивая в (15.7)
422
15. УРАВНЕНИЯ ДВИЖЕНИЯ
ИДЕАЛЬНОЙ ЖИДКОСТИ
первое слагаемое нулю, заключаем, что подынтегральное выражение равно нулю, и получаем уравнение движения в векторной
форме*:
а
ИР.
Второе
слагаемое
+ этаар= К.
в уравнении
(15.8)
(15.7) после приравнивания
нулю порождает краевые условия, выраженные через давление
и перемещения точек границы:
ртьдт |
=0.
(15.9)
Если часть границы Уи области соприкасается с неподвижной стенкой,
то из (15.9) с учетом р = 0 получим
условие
от-
сутствия перемещений на этой части границы в направлении
вектора, нормали 9%, называемое условием непротекания (непроницаемости границы):
тдт |; = 0.
*См.:
Лойцянский
Л.Г.
16.
АЭРОДИНАМИЧЕСКАЯ
ЗАДАЧА НЬЮТОНА
В 1687 г. вышел в свет исторический труд И. Ньютона „Математические начала натуральной философии“. В разделе 7 „О
движении жидкостей и сопротивлении брошенных тел“ Ньютон рассматривает задачу о сопротивлении движению шара и
круглого цилиндра в „редкой“ среде (идсальный газ, являющийся моделью воздуха, либо слабо сопротивляющаяся жидкость).
Затем он исследует вопрос о движении усеченного тела врал
шения в этой же средс и ставит проблему поиска уравнения
образующей тела вращения, для которого сила сопротивления
была бы наименьшей.
Ньютон приводит решение задачи об усеченном теле вращения: „Когда же кривая Г№С
будет такова, что если из любой ее
точки № опустить на ось АД перпендикуляр ММ и из „конечной“ точки С провести прямую СР параллельно касательной
М№т, то имеет место пропорция ММ: СР = СРЗ: (4ВР.СВ?)“.
Итак, верна формула (рис. 16.1)
ММ
РЗ
161
СР АВР.СВ?’
(16-1)
однако Ньютон не дает объяснения тому, как он пришел к
этой формуле. Впоследствии
он
передает
комментаторам
м
А
Г&
и
р
Рис.
16.1
своих трудов наброски вывода, которые были опубликованы
только в 1727-1729 гг., когда уже завершался первый этап
создания вариационного исчисления. Подготовительные материалы Ньютона были переведены с латыни А.Н. Крыловым и
опубликованы уже в наше время*. Из опубликованного видно,
“См.:
Крылов
А.Н.
424
что
16. АЭРОДИНАМИЧЕСКАЯ ЗАДАЧА НЬЮТОНА
Ньютон
владел
числения, которые
Лагранжем.
многими
г
—8
5 5-е
„(2
1
РО
1
Рис.
элементами
впоследствии
16.2
вариационного
разрабатывались
ис-
Эйлером
и
Формализуем аэродинамическую задачу Ньютона, используя современный аппарат вариационного исчисления. Пусть тело вращения с осью вращения
Ох (рис. 16.2) движется со скоростью © (и = ®| = с0п8) в ньютоновской среде и сталкивается
с распределенными в среде ша-
риками. Ньютоновской называл
ют редкую среду с распределенными в ней неподвижными абсолютно упругими шариками.
Задача состоит в том, чтобы
определить форму носовой части тела, вращения, обладающего
минимальным сопротивлением.
Будем предполагать, что ось Ох жестко связана с телом
и направлена по вектору скорости %. Сила С) сопротивления
среды, действующая на тело, равна”:
р
О = 2т4("(1))* — эта |[ Сота)
о
(16.2)
где 4= 0,5ро? — динамическое давление; р — плотность среды;
у =|5| — абсолютная величина скорости; г =7(1) — радиус
сечения тела на расстоянии т от точки максимального радиуса тела врашения
(от миделева, сечения радиуса а = т(0));
9 —
угол наклона образующей на расстоянии 1 от миделева, сечения
(угол между касательной к образующей и осью Ох, отсчитываемый по часовой стрелке); {
*Вывод
Тихомиров
этой формулы имеется,
В.М., Фомин С.В.
длина тела; С(9)
например,
в книге:
— местный
Алексеев
В.М.,
коэффициент
сопротивления
С(9) =
В выражении
гасмос
среды,
равный
25129,
9>0:
0,
9<0.
(16.2) для силы сопротивления
2та("(1))*
включено,
чтобы
© первое сла-
учесть возможное
плоское
затупление в носовой части тела, (см. рис. 16.2).
'Требуется найти такой профиль г(5) тела вращения, при котором для заданных значений д, [и а функционал ©) принимает
минимальное значение.
Преобразуем интеграл в выражении (16.2) для ©, используя
представление С'(9) = 25129, тождество (2) = — 29 и тригонометрическую формулу 12 9 = ег
управление и = #9:
а затем введем в него
1
—2^
2та
Ч
1
| СЯ
(2) азх=4та=4
Ч]
о
.
| 5
"о ат.
Ти
0
С учетом этого преобразования исходная задача сводится
задаче Лагранжа в форме Понтрягина для функционала,
Пк
|@)
НС
м] = ==
ру] = та
|
»+[
5("
+
0
ги?
Те
к
16.:
(16.3)
с дифференциальной связью
и =Ьи.
На левом
конце задано
условие
(16.4)
закрепления
1'(0) = а, а правый
конец свободен.
Введем
канонические
переменные
тона,
т, г, ри
3
Н(т,т,и,р)
=-ри-
ти
Ти.
функцию
Гамиль-
(16.5)
426
16. АЭРОДИНАМИЧЕСКАЯ
ЗАДАЧА
Каноническая система, дифференциальных
вается в данном случае так:
о
ти
г=Н»
и _
1
р=-Н,.
НЬЮТОНА
уравнений
записыр
(16.6)
Первое уравнение этой системы эквивалентно уравнению связи г’= и, а второе сводится к следующему соотношению:
3
р = тт:
Систему (16.6) нужно дополнить алгебраическим
уравнением Н" =0
(см. 8.2), которое в данном случае имеет
вид
ги? (3+ и?) _
(1+ 2)?
К системе дифференциальных уравнений также добавим краевое условие на левом конце (0) = а и условие трансверсальности
на правом, которое для задачи со смешанным функционалом
Ти(2)] + ле
и) ах
имеет вид р(12) = -Т[г(12)], а в данном случае с учетом (16.3)
записывается следующим образом: р(Г) = —(0.
Итак, получена полная система уравнений
и =Ь-и,
# __
Р
из
ти’
о м? (3+?)
Раша
_
=
(16.7)
(0) =а,
р) = (0
Однако не будем напрямую интегрировать систему (16.7),
а, воспользуемся тем, что функция Гамильтона, не зависит явно
от независимого переменного т. В таком случае сама функция
427
Гамильтона является первым интегралом системы, т.с. Н =
= с0186 на решениях системы. С помощью третьего уравнсния
системы (16.7) исключим из представления (16.5) для функции
Гамильтона Н переменное р.
Тогда соотношение Н = с008
можно записать в виде
2чи3
(+2
Далос,
Е
третье
уравнение
=
с0186.
системы
(16.7)
верно
при любом
[0,1], в том числе и при 1 =1. Значит,
"(1
и? (1) (3+2 (0)
или, с учетом пятого уравнения системы,
(3
и?
"(1) (1 _ и?ия)
‚50.
(16.9)
Но это возможно только в случае* (Г) = 0 или (1) = 1.
В первом случае, когда 7(1) = 0, из равенства, (16.8) вытека-
ет, что Н(П =0, т.е.
3
ти
_
(1+2)?
=
0,
откуда либо т =0, либо и = 159 =0.
Это указывает на, вырожденную ситуацию, при которой профиль тела совпадает с
осью вращения Ох.
Во втором случае, когда и(р) = 1, из (16.8) и (16.5) получаем
равенство Н(Т) =т(1) /2, с учетом которого само соотношение
(16.8) можно записать в виде
23
пе
т
2’,
*Есть также симметричный случай и(Г = —1, который приводит к
уравнению нижней, симметричной части профиля тела и, в сушности, не
дает ничего нового.
428
16. АЭРОДИНАМИЧЕСКАЯ
ЗАДАЧА
НЬЮТОНА
откуда находим
2
2
=(2) = кое
(16.10)
Эту связь учтем в первом уравнении системы
ко
(И)
ат
или
Мы
(16.7):
и
43
4х
1
3
2
ЕТ
В
аи
:
пришли
к дифференциальному
мися переменными,
которое
Ге
ТЗ
Е
т
1
р
уравнению
можно
1
(
с разделяющи-
проинтегрировать:
2
и
Я
Е +)
откуда
[-2
Ша
"(0
1/3
1
и
ч--ни-^).
р +
т)
(дит
16.11
(16.11)
Объединяя (16.10)и (16.11), получаем параметрические урав-
нения функции 7(5), определяющей искомый контур обтекаемого тела;
(_,
Туз
х=р-
1
(да
эти
Из этого параметрического
5).
представления с помощью
вого условия 7(0} = а на левом конце можно
и коэффициент
системе
наклона,
10 = 190
трансцендентных
а
(16.12)
И
при
4 =0.
Это
уравнений
_ (1+ и)?
гр
4’
(а
Аа
(0)
+
+в
1
крае-
найти значение (1)
- 1)
4/
приводит
к
429
Сопоставим найденное решение задачи с решением, которое
предложил
Ньютон.
|ВМ| =1-+,
Вернемся
|ВС| =т(1,
к рис.
(ВРС =9.
16.1.
Имеем
Согласно
|ММ| =х,
построению
Ньютона,
[ВС]
|ВР!
откуда,
учитывая
=
или
69,
треугольнике
вид
управления
|ВР|= "о.
СВР
= (29,
Из
и = 129,
соотношений
получаем
в
|ВР|
=
прямоугольном
имосм
1
РР = Ва? +|ВРР= 7 2 (1+ 5).
Из пропорции Ньютона
(16.1) в введенных обозначениях нахо-
Дим
‚
„30 (1+ ти
иль
=
"ФрРо
(1+2)?
—
Аи’
Мы получили первое уравненис в парамстрическом представлении (16.12) функции 7(5). Значит, Ньютон действительно
решил поставленную им задачу, но смысл найденного им решения раскрылся гораздо позже, когда, стал достаточно развитым
аппарат вариационного исчисления.
17. ВОПРОСЫ УСТОЙЧИВОСТИ
КОНСТРУКЦИИ
К
проблеме
ственных
собственных
(свободных)
значений
колебаниях
приводят
задачи
механических
о соб-
систем,
на-
пример, задача о „малых“ колебаниях струны или мембраны.
Другой важный класс задач механики, связанный с проблемой
собственных значений, — класс задач об устойчивости механических систем.
Оказывается, что при определенных внешних нагрузках
упругая или упругопластическая система, может иметь несколь-
ко положений равновесия,
устойчивы, а другие нет.
т
<“
Рис.
17.1
причем
одни
из
этих
положений
Рассмотрим прямолинейный
стержень, сжатый продольной
силой Р, направленной строго по
оси стержня (рис. 17.1). В этом
случае начальное положение (без
изгиба) является положением равновесия.
Для суждения об
устойчивости этого положения равновесия сообщим рассматриваемой механической системе некоторое возмущение в виде поперечной нагрузки,
вызывающей
прогиб
у(7).
При отсутствии
сжимающей силы Р малая поперечная сила вызовет малый прогиб. Если сила Р присутствует, но мала, то малая поперечная
сила также вызовет малый прогиб.
Равновесие стержня в
этом случае является
устойчивым.
Это равновесие
перестанет
быть устойчивым, если сжимающая сила Р превысит некоторое
пороговое значение. Тогда даже незначительная поперечная нагрузка вызовет большой прогиб.
Пусть сжатый стержень имеет переменное поперечное сечение и сжат с двух сторон равными по величине продольными
431
силами (рис. 17.2). Тогда профиль у(т) его изогнутой оси описывается
дифференциальным
уравнением*
у
вазни (Ка2)у э РВ
Здесь
Е
—
модуль
Юнга
0.
(17.1)
для
материала, из которого изготовлен стержень; [(2) — осевой
момент инерции поперечного сечения, соответствующего коор-
ы
в |
“о
у(2)
р
т
х
Рис, 17.2
динате 1, тЕ
(0.1).
К уравнению (17.1) следует присоединить краевые условия,
вид
которых
стержня.
зависит
от
Ограничимся
того,
каким
образом
рассмотрением
закреплены
двух
типов
концы
закрепле-
ния:
1) оба конца жестко заделаны:
(0) =У( =0,
(0) =у@=0;
(17.2)
2) оба конпа шарнирно оперты:
(0) =У(1) =0,
у’) =у’@ =0.
Задача об устойчивости положения равновесия сжатого
стержня состоит в определении критических нагрузок, т.е.
таких значений продольной силы, при которых возникает несколько положений равновесия. При этом особый интерес представляет значение наименьшей критической нагрузки.
Дифференциальное уравненис (17.1) можно привести к виду
Аж
АВх = 0, если положить
4
АЕ.“ 4 (2) =
из (1) я)
а2
в=-“.
ЕР
ат?’
*См.:
Феодосьев
А
В.И.
4
4
4
Ца (аа
Г
НТ р,
432
17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
Энергстическис нормы прогиба у(2) относительно этих опсраторов имеют вид
1
В/ГА= (4445у) -в [1
"(2 ах,
0
|
ВВ = (Вуны = — обеду
0
Интегрируя по частям, можно убедиться, что независимо от
типа краевых условий эти нормы равны:
1
1
ВЫ,= в [еду
а, Па = [ие
0
0
Оба оператора А и В при рассматриваемых краевых условиях являются положительно
определенными.
Поэтому
ет бесконечное число собственных значений,
нагрузок”. Наименьшая из них Р! равна:
Р =шт
ТЫ
|?
существу-
т.е. критических
= В
(17.3)
"
Дис’
где минимум функционала ищется при соответствующих краевых условиях.
В случае шарнирно закрепленных концов задачу можно свести
к исследованию
нения
*См.:
(ОДУ)
обыкновенного
второго порядка,
Коллатьау Л.
дифференциального
урав-
так как условия 9(0) = у(1] =0
433
являются предварительными,
а условия со вторыми производ-
ными — это естественные условия. Полагая для простоты, что
[(х) = сопзв, обозначим и = Гу”. Тогда функция ц(х) удовлетворяет краевым условиям
и(0) = и =0
и дифференциальному
(17.4)
уравнению
Р
Ви’ + и =0.
(17.5)
Задача о наименьшем собственном числе (0 наименьшей
критической нагрузке) сводится к экстремальной задаче
[м
0
Е
1
[г
— паи,
НР
ах
О
или, что равносильно,
1
1
в [ма
—>ии
при условии
0
[тоя
ат =1.
(17.6)
0
Из сравнения краевых условий видно, что условия (17.4)
приводят к классу функций более широкому, чем условия (17.2).
Поэтому
при
шарнирном
грузка, меньше,
закреплении
чем при жестком
первая
закреплении.
критическая
на-
С точки зрения
механики это объясняется тем, что при жестком закреплении
увеличивается количество внешних связей, т.е. вводится дополнительная поддержка конструкпии, и для ее „раскачки“ нужна
большая сила.
Рассмотренный подход, связанный с вычисленисм наименьшсй
критической
нагрузки,
в литсратуре
называют
ским подходом к решению задач устойчивости.
статичс-
Развитый выше
434
17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
метод находится в рамках статического подхода и, по сути,
является методом энергетическим.
Безусловно, наиболее общий метод решения задач устойчивости
мсханичсских
систем
состоит
в
исследовании
движсния
системы при малых возмушениях. Такой метод естественным
образом приводит к понятию устойчивости решений системы уравнений движения по Ляпунову [УПГ. На этой основе
строят динамические критерии устойчивости. В случае консервативных систем оба подхода, статический и динамический,
приводят к совпадающим
результатам“.
Пример 17.1. Обратимся к задаче об устойчивости положения равновесия прямолинейного стержня, один конец которого свободен, а другой жестко заделан.
Предположим, что
сечение стержня постоянно:
Рассмотрим
чил
малос
статический
боковос
/(2) = соп8 = Г.
подход.
отклонение
подчиняться дифференциальному
[= соп8+ находим
УЕ"
Пусть
(17).
Это
уравнению
стержень
полу-
отклонение
будет
(17.1).
= 0,
С учетом
(17.7)
где А? = РЕГ.
Условия на, левом, закрепленном конце очевидны:
(0) =ч/'(0) =0.
(17.8)
Чтобы получить краевые условия на свободном конце, разложим вертикальную силу на две составляющие, одна из которых — поперечная сила — выражается через приложенную силу
в виде
ау
О =Ршоа=Р 9
Поперечная сила, в свою очередь, есть производная от изгибающего момента” М = ЕТу", т.е.
9=-—(ЕТу")'. Так как изгибающий момент на свободном конце равен нулю, имеем 1/" (1) = 0.
*См.:
**См.:
Вольмир А.С.
Феодосьев В.И.
435
Сопоставляя представления для силы @), приходим к следующим
краевым условиям на правом, свободном конце:
У" =0,
Задачу
(17.7)-(17.9)
у"
=КУЦ.
можно решить
(17.9)
точно, используя мето-
ды решения линейных ОДУ с постоянными коэффициентами
[У]. Общее решение ОДУ (17.7) имеет вид
у(т) = АзшАт - ВсозКх + Ст-+ р.
Краевые условия (17.8), (17.9) приводят к системе уравнений
относительно постоянных интегрирования А, В, С, Р:
В-+-Ь=0,
АКС
=0,
АК? эт 1 -— ВЕ?соз | = 0,
С=0.
Решая эту систему, находим А=С=0,
В =-Р. Система имеет
ненулевое решение, согласно третьему уравнению, лишь при
081 = 0. Следовательно,
М
(22-105,
п=0,1,2,...
Зная возможные значения коэффициснта
шую критическую нагрузку:
2
ЕТ
2
Ре
=
Кит
К, находим
—
(17.10)
наимсень-
(17.11)
о
Решим ту же задачу с помощью энергетического метода. При исследовании равновесных состояний консервативных
систем вместо вариаций работы внутренних и внешних сил
рассматривают вариацию полной потенциальной энергии П системы, которая записывается следующим образом:
[
—
==
{
в»
|
п= БЕТ [24
о
Р | (4)? ах.
(17.12)
436
17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
Сравним
эту формулу
а второе
слагаемое
с (17.3):
равно
первое слагаемое
(-5Р) ПУ.
Для
есть ИА,
равновесия
кон-
сервативной системы со связями, не зависящими от времени,
необходимо и достаточно, чтобы первая вариация потенциальной энергии системы обращалась в нуль: 9И = 0.
Чтобы найти минимальную критическую нагрузку, используем идею метода Ритца в следующей интерпретации. Пусть
изогнутая ось стержня при возможном
начальной прямолинейной
формы
может
отклонении от первобыть
представлена в
виде
(т) = У‘ап(+).
=
(17.13)
В этом представлении каждая из функций 7(7) удовлетворяет кинематическим краевым условиям, так как статические
условия (при х =1) являются сстественными и их зарансс фиксировать нс требустся.
Подставляем представление (17.13) в выражение для полной
потенциальной энергии. Получим, что П является функцией
от коэффициентов а;: ИП = П(а1,а2,..., ав). Вариацию П можно
представить как сумму вариаций, соответствующих независимым вариациям параметров в:
Отсюда, приравнивая первую вариацию нулю, получаем систему уравнений относительно 4:
ЭП
—
ба. = 0,
=1,
4=Тп п.
17.14
(17.14)
Так как полная энергия является квадратичной формой параметров а;, система (17.14) представляет собой однородную систсму линейных алгебраических уравнений относительно а1, ...,
437
а.
Нас интерссуют ненулевые решения этой системы.
Поэтому значения критических нагрузок получаем, приравнивая
нулю определитель системы.
Вычислим несколько приближений к точному значению критической нагрузки. Отметим, что в силу условии задачи функции 7: (5) должны быть четными.
1. Первое
приближение. Пусть у(т) = а222, 0<т<1.
Тогда кинсматичсскис красвыс условия при 1 = 0 выполняются.
После интегрирования имеем
р
В
П=2Е1а 1 -— 2Раз.
Из условия ОП/да2 = 0 находим
Погрешность по сравнению с точным значением составляет
примерно 20%.
2. Второе приближение. Полагаем у(<) = а2522
+ ат“.
Тогда
П=2ЕП
:
(4 + 4азалЁ + и)
5
1
4
5
—2РВ (543 + таза
Система уравнений
ЭП
—
=0
даз
?
ЭН
бо
принимает следующий вид:
(ЕТ _ СР) 2+ (261? _ в) = 0,
(Е! _ СВ) + (ве _ тв) 4 =0.
4
+ 54).
438
17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
РР
Обозначая Р* = —_,
ЕТ’
приравниваем нулю определитель системы:
р*
2“
3
_Р
2Р^
5
—0
18 _2Р
5
откуда (Р*)? — 45Р* + 105 =0.
5
т
Определив Р*, найдем
Е
р 2) —= 2,5055.
Здесь погрешность по сравнению с точным решением составляет 1,2%.
2. Третьс
приближение.
Взяв (т) = а25? + аа" +
+ а626 и повторив вычисления, получим
Е
Р®3) —= 2,48,
что дает погрешность 0,4%.
Обратим внимание на то, что в рассмотренном примере
приближенные значения минимальной критической нагрузки
завышены по сравнению с точным решением. С механической
точки зрения это объясняется тем, что деформируемое твердое
тело представляет собой механическую систему с бесконечным
числом степеней свободы. Подчиняя решение лишь конечному
числу координатных функций 1;(7), мы ограничиваем число
степеней свободы, т.е. накладываем на систему дополнительные связи.
Жесткость системы повышается, и критическая
нагрузка возрастает.
18. ВАРИАПИОННЫЕ
ПРИНЦИПЫ ЛАГРАНЖА,
РЕЙССНЕРА И КАСТИЛЬЯНО
Преждс чем рассматривать вариационныс принципы Лагранжа, Рейсснера и Кастильяно применительно к задачам для
линейных упругих тел, сформулируем закон сохранения энергии для тела, находящегося в равновесии:
=
+50,
где 0 — внутренняя энергия тела объемом У и ограниченного
поверхностью 5:
о-
[чу
у
и — объемная плотность внутренней энергии,
энергии, приходящесся на сдиницу объема;
97
=
би
ау
-
у
[бы
т.е. количество
а5
5
работа, объемных (с компонентами 6,) и поверхностных (с компонентами
2;)
сил
на
возможных
компоненты вектора перемещения;
приобретенной
мирования,
наличии
телом.
@
би;
м
—
количество теплоты,
Здесь и далее мы опускаем знаки сум-
предполагая
одинаковых
перемещениях
по умолчанию,
индексов
что в формулах
выполняется
суммирование
при
от
1
до 3.
Положим, что граничная поверхность 5 рассматриваемого
тела разделена, на две части: 5, на которой заданы компоненты вектора перемешения
‘и = ан,
® =
1, 2, 3,
(18.1)
440
18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
и 5., на которой заданы
5 =5. 05 и 5. П 5. = 9.
сти би.
В дальнейшем полагаем,
ты тензора деформаций =;;
поверхностные силы 2;. При этом
Очевидно, что би; = 0 на поверхночто деформации малы и компоненопределяются соотношениями Коши
ви =5 (5, + 9...
1
ди;
(18.2)
9;
:
Так как компонснты вскторов объемных 65; и поверхностных
р; сил являются заданными функциями дскартовых координат
хь
(Е =1,2,3),
то
работа
6
внешних
сил
на
возможных
перемещениях равна:
би = 5 Дьчьау + | ин48).
У
5
Вариацию количества, теплоты, приобретенного изучаемым
телом, зададим в виде
50 = | ТоВАУ,
у
где Т — абсолютная
объема тела.
температура;
й —
энтропия
единицы
В дальнейшем будем рассматривать два случая деформирования: адиабатическос и изотермическос. В первом случас
В =1(11,12,23) — известная функция и 0й = 0. Во втором случае известна абсолютная температура Г = Г (71,12, 23)
ибТ = 0.
Только для этих двух случаев
89 =5 [ тьау.
При изотермическом деформировании вместо и = и(=у,В)
нужно использовать объемную плотность свободной энергии
441
А(Ез,Т) и переход от первой функции ко второй осушествляется с помощью преобразования Юнга — Фенхеля”:
А(Е.Т)= зир (ще,В) -ТЬ.
При
=; =0
массовые
плотности
свободной
и внутренней
энергий равны: 4(0,Г) = В(Т) и (0.1) = Н(В). Функции В(Т)
и Н(1) при Т#Щ
(ТП = соп86 — начальная температура, тела)
отличны от нуля, и их учет необходим при изучении процессов
деформирования, протекающих при переменных температурах
и сопровождающихся рассеянием энергии. Так как процессы
рассеяния энергии мы не рассматриваем, то в дальнейшем
полагаем, что В(Т) =би Н(1) =0.
Таким образом, условие стационарности функционала,
Лич] =0[м] - Ыч|,
(18.3)
где
Им] = Геи,
Цы] = Гьшау
у
у
+ [еав,
8.
определяет компоненты и; 1=1,2,3) векторного поля и истинных перемещений при адиабатическом деформировании на,
множестве допустимых функций ;, непрерывно дифференпируемых в У и принимающих заданные значения на 5,. Функ-
ционал (18.3) называется функиионалом энергии.
Отметим,
что при изотермическом деформировании первое слагаемое в
правой
части
соотношения
(18.3)
должно
быть
заменено
на
У
Рассмотрим условия, при которых задача поиска стационарных точек функционала энергии сводится к задаче о его
минимумс.
Первый вопрос, который необходимо в этом случае
выяснить, — это вопрос об ограниченности снизу функционала
энергии (18.3).
*См.:
Бердичевский
В.Л.
442
18. ПРИНЦИПЫ
ЛАГРАНЖА,
РЕЙССНЕРА,
КАСТИЛЬЯНО
Пусть кинематические ограничения отсутствуют, т.е. 5, =
=. Тогда объемная плотность внутренней энергии и(=;/) равна нулю на векторных полях перемещений, соответствующих
малым перемещениям упругого тела как абсолютно твердого,
т.е. при
Где
с; = 6008$,
=
с
и; = 6003
—
вики
®ь,
(18.4)
компоненты
всктора
поворота;
к — символ Леви — Чивиты, представляющий собой тсензор ранга 3 (ел, = 1, если индексы 1, 7, К различны и следуют
в порядке (1,2,3), (2,3,1) или (3,1,2), езк = —1, если этот поря-
док нарушен, и ед = 0, если среди индексов есть одинаковые).
При таких векторных полях перемещений имеем =; =0. Необходимым
условием
ограниченности снизу функционала
[и]
является равенство нулю его значений на векторных полях перемещений вида (18.4).
Поясним это условис.
Функционал [и] неотрицателсн и, следовательно, ограничен снизу нулем.
Функционал Ри] линеен, и поэтому множество его значений не ограничено.
Сумма функционалов
Им] — [м] может оказаться ограниченной снизу только за счет
того, что с увеличением Г[ч]| растет и О|[ч|, причем отметим,
что
последний,
будучи
квадратичным
функционалом,
растет
быстрее.
Однако ясно, что рост функционала (|| не сможет компенсировать рост [м] на тсх функциях в, на которых
Им] = 0, т.е. на векторных полях перемещений вида (18.4).
Указанное условие ограниченности снизу функционала, /[ч|
дает соотношение
Гы
Ч енкшуть) ЧУ Е бе
у
откуда
при
+ ердкшуть)45 = 0,
5
с 720
и и; #0
в общем
случае
равенств:
Гьау + [рав =0
У
5
следуют
шесть
443
Чек (Гоззьау
У
Равснства
и момент,
(18.5)
| рззказ)
=0.
(18.5)
5
означают,
действующие
Если равенства
+
что
на тело,
суммарные
должны
(18.5) выполняются,
внешние
сила
быть равны нулю.
то функционал
/[м] инва-
риантен относительно движений упругого тела как абсолютно
твердого. В этом случае задача поиска стационарных точек
функционала, /[и] не имеет единственного решения. Чтобы решение было единственным, на поля перемешений надо наложить
ограничения. Например, можно положить, что
[-
ау
=0
У
и
соки
ау
=
0,
У
т.е. приравнять нулю среднее перемещение и средний поворот
тела.
Если упругис свойства рассматривасмого тсла нс вырожда-
ются, т.е. и(=) > 0 при =; 7 0, то, как оказывается, условия
(18.5) при 5, = @ являются
достаточными
для ограниченности
снизу функционала /[ч|. Функции 6; и р; при этом должны
быть суммирусмыми с квадратом.
Если на части 5, граничной поверхности тела заданы компоненты вектора перемещения, то можно доказать, что функпионал энергии также ограничен снизу для любых суммируемых
с квадратом
функций
6; и р;, в том числе и для имеющих
ненулевые суммарные силу и момент*.
Ограниченность снизу функционала, энергии позволяет поставить задачу об определении для него минимизирующсего
элемента.
Эта задача может быть сформулирована в форме вариационного принципа Лагранжа: среди всех возможных
перемещений действительные перемещения сообщают функционалу энергии минимум.
*См.:
Бердичевский
В.Л.
444
18. ПРИНЦИНЫ ЛАГРАНЖА,
Уравнения
Эйлера
РЕЙССНЕРА,
для функционала
КАСТИЛЬЯНО
/[и|] можно
получить,
приравняв нулю его первую вариацию:
ди.
е-веы ау — | вбиьду
6. и, би] =
_ 48 =0.
— [бб
3
и
7
У
5
Из теории упругости известно, что компоненты 0$; симметрического тензора напряжений 9 связаны с компонентами =;
тензора деформаций соотношениями**
ол
=
ди,
ОЕ
Поэтому,
согласно
ди
песбев
У =
5
й
теореме
]
°
Остроградского
1./ди;
[оби
90
95;
ди.
Гаусса.
)ау =
д
У
=
1
5 ]
д
[б5(оыбиы)
д
+ да:
с
(99)
Оо
5;
—
би
—
до
Эр, би.
ау
=
у
=
9.1 [м] =—
(о
|
2;
+ В:
/
оливы
изо
биг ау + [сот
у
45
1|
до.
ди,
бт;
ЧУ.
й
— ру) 0щ 48 = 0.
5
Так как вариации д; произвольны в объеме У и на поверхности бо, то в силу леммы Лагранжа
9
+;
=0
в
Ор 1
**См.:
Работнов
Ю.Н.
У
И
биту
= Р:
на
55.
(18.6)
445
Уравнения (18.6) представляют собой уравнения равновссия в
объемс У и граничные условия на поверхности 5. Они были
получены с учетом того, что ди; = 0 на поверхности би.
Пример
энергии
18.1. Пусть задана объемная плотность свободной
1
т
— Сум
— Ей ИЕ —=й
А(=.Т)= эСОцкКЕн
5
т, )
где Суы — симметрический тензор четвертого ранга независимых от координат коэффициентов упругости, Суми = Сим =
—=
мик
=
Съид
Е7
=
Ей
—
тензор
температурных
деформал
ций.
Используя вариационный принцип Лагранжа, получим
уравнения Эйлера для соответствующего функционала и запишем эти уравнения через компоненты вектора перемешения.
Функционал энергии для заданной объемной плотности свободной энергии будет равен:
1
ПИ] = м
у
—
&7))—
Сиы(- ©)
(=)
ду
—
|
ъчму
У
—
|
бинаб,
5
и условия (18.5) ограниченности функционала, /[м| снизу выполняются. Тогда
и, дм] = | Сонце
=
бе ау —
и
так как де >= 0.
бо
446
18. ПРИНЦИПЫ ЛАГРАНЖА,
РЕЙССНЕРА,
КАСТИЛЬЯНО
Преобразуем первое слагаемое в правой части этого равенства с помощью теоремы Остроградского — Гаусса:
ди
[Си
Ен
— Е))бе
ЧУ
==о
[бы
&н—
(о
Чу
=
(Сиен- =) би. )-
(Синцен- Е )ди; } В
= [=
и
ди
+ =.)
— 5х (Сонкеы — ет) д: — ыы (Сункеы — ет) би ау =
(1)
=
|
Сзщцеы-
=
уубщая
— ]
пы
ее)
95;
ау.
первой
вариации
+,
ау =0.
5
Окончательно условие равенства
функционала
[и] примет вид
(и)
=
|
(Свен
— еп:
р)
5
нулю
6:
:
— (сон
45
—
—
=(Р)
еыеыы
д
0%;
у
Уравнения Эйлера в данном случае таковы:
Сны
(Ен — Е)
ру
5
СпькЕы
+=
— п:
—р:
=0
в
И
на
Воспользовавшись соотношениями Коши
дик
де
Сы
ал Отд
‚ОМ
бонг,
й
=
= Сны
Я
де.
(т) п;
СпнЕн
+р;
В
на,
55.
(18.2), получим
у, ,
5.
Я
447
Преобразование Юнга — Фенхсля функции ч(=;;) по =;
%* (ов)
=
зир(05=5
—и(=:))
(18.7)
21
называют
и
далее
полагаем,
прерывно
5
объемной
плотностью
что
компоненты
дифференцируемы
7 9) удовлетворяют
тасм,
что
дополнительной
1%; вектора
в У,
граничным
компоненты
911
а на
Кроме
напряжений
дифференцируемы в У. Плотность внутренней
выразить через дополнительную работу:
% (=)
=
зар (ое
—ш
Здесь
перемещения
поверхности
условиям.
тензора
работы.
с
5,
не-
(при
того, счи-
непрерывно
энергии можно
(о:3)).
(18.8)
(ел
Используя соотношение
(18.8), можем записать
ШЕЛч| = шЁзар
б, м],
и
и
(18.9)
—
а
где
бум
=
|[ (оце
—
чо))ау
—
у
|
ъшау
У
|
раназ.
о
Решение минимаксной задачи (18.9) при указанных требовал
ниях к и и б является стационарной точкой функционала, /[6', 11]
на множестве всех б и и, удовлетворяющих граничным условиям (18.1). Вычисляя первую вариацию этого функционала
по
компонентам
тензора
напряжений,
находим
#4
=
ди“
. Если
же варьируем функции 1;, то получаем уравнение раб весия в
объеме У и граничные условия на 5о (см. (18.6) ).
Сведение задачи равновесия упругого тела к задаче поиска
стационарной точки функционала, /[5,%] называют смешанным
вариационным принципом или вариапионным принципом Рейсснера. Стационарная точка функционала 1[5,и| является седловой, так как она обеспечивает максимум /[б,ц| по функциям
о; и минимум по функциям 14.
448
18. ПРИНЦИПЫ ЛАГРАНЖА,
РЕЙССНЕРА,
КАСТИЛЬЯНО
Пример 18.2.
Используя вариационный принцип Рейсснера, получим уравнения (18.6) и соотношения, связывающис
компоненты тензоров напряжений и деформаций в изотермическом процессе деформирования. Объемная плотность дополнитсльной работы для изотропного однородного тела имсст
вид*
,
1
А
(Т)
=
А
л
(из
— здаи°®)
ЧЕ
оу,
где А, и — коэффициенты упругости; ок — сумма диагональных
элементов
матрицы
0%.
В данном примере
_
Це,м] = ] [с
1
_ ди (бы
А
2
— И)
—
У
-Еон
у
—
[ьшьу
—
У
Вычислим
ее нулю:
вариацию
19,
функционала
1
м]
=
]
Е
— ди
—
21
+ 2
риназ.
5
/[5,и|
по оз; и приравняем
съьби
— =
2
(оч;
|
й
76;
бо; ау
=
0,
$
где
5; —
символ
Кронекера.
Отсюда
следует,
что при произ-
вольных функциях 007
1
=. — 2
2:1
(с и
А
2
и
оъьби .. ) += я.бал.
Если же вычислим вариацию функционала [би]
из условия дб, и,ди] = 0 получим (18.6).
*См.:
Работнов
Ю.Н.
по и; то
449
Вариационный
принцип,
двойственный
принципу
Лагран-
жа, можно ввости следующим образом.
Сначала провсрясм
допустимость перестановки порядка вычисления максимума и
минимума в соотношении
(18.9). Эта перестановка, даст
зирш!(Ф[б, и] + Г[б,и]) < Ю,
—
а
где Го — минимум функционала,
Ф[б.ч]| =-
/
[и];
- 9) щ АУ — ИЕ
У
И.
(18.10)
и
— вит) а5,
бе
и] =
[озтяная
—
Гееьау
Эа
Очевидно, что для тензорных полей б, удовлетворяющих
условиям равновесия и граничным условиям (18.6), ФФб, и] = 0,
а для тензорных полей 9, не удовлетворяющих граничным условиям, ШЁФ[б,ц| = —со в силу линсийности этого функционала, по
4.
и
Предположим, что функции и", минимизирующис функционал „/[ц|, непрерывно дифференцируемы. Введем обозначения:
та ва)
_
=
)
о1) =
Эи(=:1)
Е ..
= == *
.
Из уравнений Эйлера исходной вариационной задачи для функционала „/[и] при заданных условиях на поверхности 5%, следует,
что компоненты о*,#7 тензора б* удовлетворяют
соотношениям
(18.6) и, следовательно, являются допустимыми функциями:
зир
б
[8] > Ё[5*|.
(18.11)
450
18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
С другой стороны, так как 5 = 5, Ц 5,
|
9
Е
*
х
*
|
У
%
о
до;
*
т; +9;
= Г
*
* ди;
г, —ц
ж/к
*
*
(1) ау — ] орпри
45 =
5
У
Увы
м
оне
— м (01;
т, (=. = =]
ЧУ -
- ] бий 48 = ] (ей) у — ] Быт ау — ] Би? 8 = К.
У
[а
Из последнего равенства и неравенств (18.10), (18.11) следу-
ет, что
шШЁЛ[ч] =зар Г [5|,
и
б
где минимум и максимум берутся по всем непрерывно дифференпируемым в У функциям 0%, в, причем и; =1и на поверхности 5, и оз; удовлетворяют соотношениям (18.6).
Вариационная задача поиска максимума функционала [*(0}
по всем тензорным полям б, подчиняющимся условиям (18.6),
представляет собой математическую формулировку принципа
стационарности дополнительной работы, или вариационного
принципа Кастильяно:
дополнительная работа, 1*(5) достигает
максимума, если тензор напряжений
удовлетворяст уравнениям (18.6).
Пример
18.3.
Получим
уравнения
б с компонентами
Эйлсра
оз
функционала,
соответствующего вариационному принципу Кастильяно, записав их через компоненты тензора деформаций.
451
При выводе тробусмых уравнений будем полагать, что поверхность 5, совпадаст с поверхностью 5, ограничивающей
рассматриваемое тело объемом У. В этом случае
ВЯ -- ] ие з)ау.
*
7]
*
.,
у
Также полагаем, что объемные 5; и поверхностные р; силы являются заданными функциями координат. Тогда из уравнений
(18.6) получаем
Эдо:
=О0Ов
У
и
борту =0
на
5.
(18.12)
дт;
Вместо шести компонентов тензора малых деформаций введем в рассмотрение шесть новых функций }: = (51,12,3) и
Еу = Ех =
из условий:
Е (11,12,53), приняв Ру; = 0 при? = 1, определяемых
Ц
+8)
-Е..
(18.13)
Далее, используя соотношение =;; = ди*/до.;. полученное
ранее, запишем условие стационарности функционала Г“[5| в
вариационном принципе Кастильяно в виде
51*[6]
—
-
[=боь
ау
=
0,
У
которос после подстановки в него соотношений
(18.13) примет
вид
_2 [(..
у
и
=—
Бобоь аУ =
+ |
ы д; ) бои
ЭЛ,
дт;
У
у
+
||
`
У
Рибо
ау
= 0.
(18.14)
452
18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Прсобразуя отдельно [>
до)
Эт
; ЧУ, получим, используя ра-
венства (18.12) и
9}
теорему
осеотралского — Гаусса,
9
вв
’ де
/,.
= [ э=-оьдму
- [+
у
‚ до
ба ау =
у
=
|
л9оьтая
5
—
[В
рт
ау
= 0.
У
В силу этого равенства, соотношение
(18.14)
эквивалентно
следующему:
] Еубо У = 0.
у
(18.15)
Введем в рассмотрение три произвольные функции координат а; = а, (21,12,13). Умножим вторую группу уравнений из
(18.12) на а; и проинтегрируем полученный результат по поверхности:
|
сабо
45
=
0.
з
Применяя к последнему
ского — Гаусса, получаем
соотношению
теорему
Остроград-
9
зи
обоиа
=0
и после дифференцирования (с учетом симметрии тензора напряжений б) имеем
[
У
960;
доу + 99
(5+
5 ‚)боцуу = 0.
5+
У
453
С
учетом
первой
группы
равенств
из
(18.12)
последнее
соотношение можно перописать в виде
51
Оси
до
(5%
+ 90
|
аи —_=0.
о
(18.16)
у
Так как функции ©; могут быть произвольными, потребуем,
чтобы до; /дх; =0 при1=7. Тогда последнее равенство имеет
смысл
только
при
+=.
Сравнивая
соотношения
(18.15)
и
(18.16), можно записать следующие равенства:
ви
В( дд, + 5...
доз
до;
где В 20 — некоторая постоянная.
.
.
7
Из этих равенств следует,
что
9223
дтодтз
= В
9305
(о
Эа
9? Е
9т19т2
933
-
ое
= В
-_]
=
И)
0,
08 аз
ее
02
(5.29;
=
да 0)
0,
а также
(97
91
д
—
971
ОРЗ
9х2 ( 951
=
ОРз
(2
Отз \ Отт
+
дт2
—
от)
дз
ОРЗ
93 от
=
дх10т20х3
—
2
=
0За2
ЭРз _ о
_
без
__
дт2
_
Эт1дтодта
—
дто
ОЕР!2
—
ы
дтз )
дз)
От10т20т3
.
=0,
’
18.18
)
454
18. ПРИНЦИПЫ ЛАГРАНЖА,
РЕЙССНЕРА,
КАСТИЛЬЯНО
Определяя Р;; из (18.13), учитывая равенства
9:
9}; _
дт; + дт; _ 2: 1)
при {=
1 и подставляя их в (18.18), получаем
д
дат
(2
_
Отт
ОЕ1з
дт>
=
дтз\
=
Е
Отз
=
дт›дтз
:
(Е
92
ги
о
2
без бе) _ Ре о,
дл
дт2
(98
_ дез
д,
0%
Система уравнений
дтз
(18.19)
97103
©)
—
013
92 Езз
0
9102
у
(18.19) содержит три из шести условий
совместности деформаций (условий Сен-Венана).
Другие три условия совместности деформаций
подставив Е»; из (18.13) в (18.17):
дз
От2дтз
_ _ дез
10
=
2
Отодтз
(97
Отз
0т2дтз
дез
= _ дтодез
№) =
ы
далее.
Окончательно
дт>
=
1 0? др
10
2 07 дт»
2 955 Эта
— 92 оз
—
дтдаз
и так
эти
получим,
др _
10222 10 ез 0
2 0
20% —
условия
примут
ОЕ
92 Езз
—_
92 Е2з
07
915
=
дт›дтз’
0? Езз
91
—
9?Е1з
9?Е1
9222
—_
9? Е12
вид
(18 20)
455
Таким образом, мы установили, что условие стационарности функционала дополнительной работы эквивалентно условиям совместности деформаций (18.19) и (18.20).
При этом
необходимыми условиями существования стационарной точки
функционала Г'[о;; являются уравнения (18.6).
Если на части 5, граничной поверхности 5 заданы компоненты вектора, перемещения (и; =; на 5,), то, представив
Л: в виде суммы /(т1,72,13) = 9:(21,12,23) + Н(туьт2,
23), где
функции 9; известны, причем 9; =; на 5, р =0
на 5, и
проделав аналогичные преобразования, также получим условия
совместности деформаций, следующие из условия стационарности
функционала,
в]
=
[оольльая—
5"
[меду
у
19. ВАРИАЦИОННЫЕ
ПРИНЦИПЫ ТЕРМОУПРУГОСТИ
Термоупругостью называют раздел механики деформируемого твердого тела, в котором изучаются процессы упругого
деформирования и распространения теплоты с учетом взаимодействия этих процессов.
В дальнейшем будем полагать, что компоненты #5; (1,7 =
= 1,2,3) тензора деформаций 5 связаны с компонентами 1;
вектора перемещений и соотношениями Коши (18.2), компо-
ненты о; симметрического тензора напряжений б связаны с
Е] и абсолютной температурой Г соотношениями
Неймана
Дюамеля
о) = Сумен — В,
(19.1)
где Син = Сны = Син
компоненты тензора коэффициентов
т
т
упругости материала, тела; В;; = Синай ). а — компоненты
тензора
ния;
температурных
9 =Т-
1%;
коэффициентов
По = с0086 > 0 —
линейного
температура
расшире-
сстественного
состояния тела, т.е. та, температура, при которой тело может
находиться сколь угодно долго без взаимодействия с окружающей средой и для которой
|8|/Ту
< 1. Как и в 18, используем
неявное суммирование по повторяющимся индексам.
Вектор
плотности
4
теплового
потока
с
компонентами
д;
связан с градиснтом температуры законом Фурьс [ХП]
9Ай
4: =
где Хх
=
уй
де.
(19.2)
компоненты тензора, теплопроводности.
- 2 4;
(19.3)
457
где р — плотность материала, тела; $ — время; д, 1=1,2,3, —
дскартовы прямоугольные координаты; 7 — массовая плотность энтропии; 4, — плотность мощности источников энерговыделения. При этом
РТоп = рс-9 + ПВьЕн,
(19.4)
где с. — удельная массовая теплоемкость материала, тела при
постоянных деформациях.
Запишсм уравнения движения среды
до .. ы—
29 2.1:
®
05;
(19.5)
р
де’
где 6; — компоненты всктора плотности объемных сил.
В постановку задачи термоупругости вводят красвыс услоВИЯ:
начальное условис при ф = 0
0
1
м
ди;
0
#=0
=%50,
=
9:
9
=90
#=0
ву:
граничные условия
ш |=.
(от),
=Рь
9, = 9,
Чт
х-®
где 5,05. = 5 — граничная поверхность рассматриваемого
тела, объемом У, причем 5, П 5, = ©; п; — координаты сдиничного вектора нормали к поверхности 5; бт
5 = 9, этП 5 =;
9, 00, 90, 1, Ру 8, @ — заданные функции.
Полагаем, что все введенные функции и участки поверхности 5 обладают необходимой гладкостью (т.е. имеют необходимое количество непрерывных частных производных).
При формулировании вариационных принципов термоупругости будем использовать свертку двух функций по времени,
которую определяют следующим образом [ХПГ]:
(+= ] аи
0
т)ае.
458
19. ВАРИАЦИОННЫЕ
ПРИНЦИПЫ
ТЕРМОУПРУГОСТИ
Для включения начальных условий в вариационную форму-
лировку соответствующей краевой задачи используем преобразованисе Лапласа [ХИ
где /(Р) — функция-оригинал; /*(р) = [1 ($) (р) — изображение
по Лапласу
функции
] (№).
Перейдем к изображениям в уравнениях движения
(19.5):
9о*
вЫ
Оз, НЫ: — р(р?и* — ри? — 52) =0
(19.6)
и в уравнении 93
.
0%
Тори" — РТот(0) =
+
5 +4.
(19.7)
Й
Так как
(а)
то, согласно
(19.4), учитывая симметрию 0; и очевидное тож-
дество
ди?
ди?
—_
ва (5 ==.) =0,
получим
РТот(0) = редо + ТоВуЕн (0) = рек90 +
1(24
и
12% диз
+1585
Поэтому
но
дт;
Ол:
дт;
закон сохранения энергии
записать
в
ру й
ди
= ре.
Е Тобь
=—.
ый 9х;
(19.3) в изображениях
мож-
ЧррТот” = 4,
(19.8)
видс
д
ди
е. — 060 — бо,
.
459
Решаем уравнсния (19.6) и (19.8) относительно ий из:
ры —
ОТ" =
Так как
1 00
1
рт
вит
ри?+ роз,
104*
4, — би: + — сд
==
ди
+ То
р. "
т=Ми
1
1
то, применяя теорему о свертке [ХТ], находим
до
ри,
Л,
04;
ОТт=и 9+
де; ’
"7
где 9( =В 9 =
.
ди; 0
0) = 9 * 4, + рс:90 +В.
7
Е=ужёЬ, + о(о0 + и);
Чтобы
получить
обобщение
вариационного
принципа
Ла-
гранжа, введем понятие кинематически и термически допустимого состояния, т.е. такого состояния, которое удовлетворяет
соотношениям Коши (18.2). закону Фурье (19.2), уравнениям
(19.1), (19.3), (19.4), а также граничным условиям на участках
5, и 5т поверхности 5. Тогда обобщение принципа Лагран-
жа можно сформулировать следующим
образом.
Рассмотрим
функционал
Лиз
=
тг
.
| (®Суывыжея
оз бубкео
ршль
Дни)
ау -—
У
5
[шо
у
9
То
кд
-
№
09 ея"
ый 9: * дл.
[++
8
45
т.
|
5
в)
-
*д*а+9)45,
460
19. ВАРИАЦИОННЫЕ
ПРИНЦИПЫ
ТЕРМОУПРУГОСТИ
который для любого # > 0 определен на множестве кинематически и термически допустимых состояний.
Вычислим первую вариацию функционала ./[и,й] и приравняем ее нулю:
Ли.9, ди, 60] = ] 9* ((Сунен— В) * бе — Вуец * 60) ау —
У
в
1
орт
у
1
т
,
/
99
(мор.
в.)
у
[+5
У
У
и
То
ож
р
5.
у
--
‚}аУ-
°
д
[=
5
То
© Ен — Вл +
1
.с
— ош) «ша
—
у
-т/
р(онео+ 29* вуз) -_
у
99
+ [(
д
99
( бр, к)
* (С.НЫЕ
В)
оны
+в0Чу
т —9 +)
+
жди;45 +
а
вт"
(Мл
м
4) +5945 =0.
(19.9)
Из уравнения (19.9) в силу произвольности ди; и 99 на участках бо, 94 поверхности 5 и внутри объема У, а также равенства
нулю вариаций ди; на 5, и 09 на бт следуют уравнения дви-
жения и теплопроводности с соответствующими
условиями.
граничными
461
Вариационный принцип для компонентов о; тензора напряжений о и координат 4; всктора 4 плотности теплового потока, аналогичный вариационному принципу Кастильяно, можно
сформулировать следующим образом. Пусть тензор 9 и вектор 4 образуют динамически и энергетически допустимое поле
напряжений и теплового потока, т.е. поле, которое удовлетворяет граничным условиям на бо и 5. На таком поле определим
функционал
пе =ь |
+7
1
[&
био
ж ©н) ау +
. 04
а
(ино)
1
, доз)
1
ау
.
эт. |
ввела)
ау
у
+
[=(^*
и
ау +
1
оо
до
де)
док
^ Оль ау
у
|
1
1...
—
==
‚
дж
9%:
9* Эд,
Одь
1
1
—
—
м
*опП
45 —
5,
ие)
где о;
= Ща;
(ре): вов. == ве + ТВла
/(рво);
обо;
вая теплоемкость
— ау(Г) а:
циентов
при
постоянных
биы = был = биы
податливости
.
Эд
= А+ —
——(
1
ау
дк
ть ы Ро ужи
ть
—
материала
1
(я
—
д*9
То
жа
45,
Эт
Го
/е —— удельная массо _
напряжениях;
компоненты
тела,
—
би
= бин -—
тензора, коэффи-
связанные
с
компонен-
тами Сумы тензора коэффициентов упругости соотношениями
Спыбыпи = дтбр; № = Кн — компоненты
ского сопротивления, Ку Алт = бут.
тензора
термиче-
Вариация функционала [[6', 4] равна, нулю, если компоненты
тензора 9 и координаты вектора, 4 являются решениями краевой задачи термоупругости.
462
19. ВАРИАЦИОННЫЕ
Вычислим
ПРИНЦИПЫ
первую вариацию
ТЕРМОУПРУГОСТИ
функционала, /[5,4| и прирав-
няем ее нулю:
я
1
Ок
1-4,58.64] = | |бумеы + да
тг
гад
/
(®- 9* и]
го
У
ЧУ — т, Гозд то" ваашая —
*9* 04
(650)
1
.
_ О
с
1
У
дол
т
- [= (== дд)9а
04
(бедер)
11
-рждорт:
— | — 9+
+ [5^
бт 49+ [об
[в
У
"бтния+
«дну — [в д (с^) «вова
]
2
«бдьЧУ
7
0
+
Чет 45 —
— [вхбоут,48—
5
.
—
- т1 [29%
ватьа8 = |
Эт
умом
1
.
94ь
тео (о 9* ви.)
Эр
и
9/1
д
— ва (59 ее
3
1
д
у
) * дот;
45 —
5
1
до
- [59 (59
дах )+доб у — п
"т.
*ждон АУ +
Тк
+ 51)
1
х ба
ЧУ +
94:
.
ЧУ +
+04
со (д* Эт —)) вы
9% [= (ое ве
+ (о
——
т
+)
[дж [усы +=
-
(6 а
49 —
* дот:
и)
8]
*даьпь
45 = 0.
463
Так как вариации 901 и 04; произвольны, то из полученного
равенства следует, что ссли функции 04; и 4; удовлетворяют
граничным условиям на участках 5% и 5, поверхности 5, то эти
функции являются решением краевой задачи термоупругости.
Необходимо отметить, что рассмотренные функционалы
Ли, 9] и [6,4] нс обладают экстремальными свойствами. В
этом состоит их существенное отличие от функционалов, которые входят в формулировки принципов Лагранжа и Кастильяно.
Если не учитывать
процессы
деформирования,
т.е. Е; = 0,
си=0и 5, = 5, = 9, то сформулированные вариационные
принципы приводят к краевой задаче нестационарной теплопроводности с соответствующими краевыми условиями.
Для получения соотношений, определяющих статическое
распределение деформаций и напряжений, а также стационарную теплопроводность в рассматриваемом упругом теле,
можно воспользоваться предельным переходом р
+0. В этом
случае функции, содержащие в качестве сомножителя параметр
р преобразования Лапласа, исчезают, а каждый из функционалов /[и.9] и [5,4] преобразуется в сумму двух функционалов:
Ли,9] = лы] + 28], 1[б,а| = 16] + 64].
При этом функционалы „71 [м] и 116] будут эквивалентны тем функционалам,
которые входят в формулировки принципов Лагранжа и Кастильяно. Условия стационарности функционалов
[9] и 15|]
эквивалентны краевой задаче стационарной теплопроводности,
сформулированной соответственно для? и 4.
20.
ДВУСТОРОННИЕ ОЦЕНКИ
В ТЕПЛОПРОВОДНОСТИ
Построенные в 19 функционалы в частном случае соответствуют двойственной вариационной формулировке линейной
краевой задачи стационарной теплопроводности.
шения
такой
задачи,
т.е.
нахождения
Помимо ре-
температурного
поля
в
некоторой (в общем случае) пространственной области У, ограниченной поверхностью
5, двойственная формулировка, позво-
ляст получить двусторонние оценки ряда важных интогральных парамстров, характсризующих процссс передачи теплоты.
Пусть распределение температуры Г(М), зависящее от положения точки М ЕУ
на замыкании У =УЦ5
удовлетворяет дифференциальному уравнению
У(^(М)УТ(М)) + ау(М) =0,
области
МЕ,
У,
(20.1)
с граничными условиями
Т(Р)=Л(Р),
РЕЗ,
(20.2)
Х(Р)УТ(Р)п(Р) + о(Р)Т(Р) = (Р),
Здесь А —
РЕ.
(20.3)
коэффициент
проводности;
ду
тепло-
объемная
мощность энерговыделения; | и
№ — заданные функции положения точки Р на участках 51
и 52 =5\51 поверхности 5’ соответственно; 7% — единичный
вектор внешней нормали к поверхности 5; х — коэффициент
Рис. 20.1
теплообмена (рис. 20.1).
465
Краевой задаче
(20.1)-(20.3)
соответствуют
двойственные
функционалы*
Лт = (осетр
чит) Чи (бт т) 45,
У
(20.4)
52
4?
ох4У
- [ Гапа5- [ ‘а5Т 45,
ПТ,а =у
5
(20.5)
55
где 4=4(М) — всктор плотности теплового потока, зависящий от положения точки
МЕТ. Функционал (20.4) определен на распределениях температуры Т(М), непрерывных на 7’,
удовлетворяющих граничному условию (20.2) и имеющих кусочно непрерывные производные в области У, а функционал
(20.5) — на непрерывно дифференцируемых в области У функциях 4(М), удовлетворяющих условиям
И
МЕХ;
а(Р)т(Р) = о(Р)Т(Р) - Ь(Р),
(20.6)
Резо.
|
Справедливы неравенства,
Пт,а < ЛГ" < ЛТ|,
(20.7)
где Т*(М), МЕТ, — распределение температуры, на котором
функционал /[Т]| достигает своего наименьшего значения. Для
этого значения с учетом (20.1)
(20.3) имеем
2ЛТ* == ] вуТ* ау+ ] НлУТ*па5- ] №Т*а8.
У
51
(20.8)
52
Выделим несколько характерных случаев оценки интегральных параметров.
*См.: Зарубин В.С. (1983 г.)
466
20. ДВУСТОРОННИЕ
ОЦЕНКИ В ТЕНЛОПРОВОДНОСТИ
1. В области У действуют источники энерговыделения с
постоянной объемной мощностью 4у, а поверхность 5’ состоит
из
участка,
51
с
заданным
постоянным
значенисм
темис-
ратуры, которое можно принять
за нуль отсчета, т.е. Н(Р) = 0,
РЕЗ\, и участка 55, на которых
2(Р) =0,
РЕ5> (рис. 20.2). В
частном случае участок 52 может быть идеально теплоизолированным и теплообмен на нем
будет отсутствовать (@(Р) = 0,
РЕ52). Ясно, что поверхность
5 может состоять лишь из одного участка: либо 51, либо 52.
При указанных условиях второй и третий интегралы в
правой части (20.8) исчезают, и мы получаем формулу для
температуры, осредненной по объему У области:
Рис. 20.2
у
Тт=—
/Т*аУ
[та =
Используя (20.7) и (20.9), запишем
этой температуры в виде
5-.=Т_
_ т
УИ
-9
20.
(20.9)
Лт]
Чу
`
двустороннюю
+
ДТ, 4] .
<Т<Т'=-2
ЧУ"
оценку
для
20.10
2. Пусть в области У отсутствуют внутренние источники
теплоты (4у(М) =0, МЕУ), участок 55 поверхности 5’ иде-
ально теплоизолирован (/›(Р)
остальной части поверхности
=0 и а(Р) =0 при РЕ 55), а на
5 имеются два не граничащих
между собой изотермических участка 51 и 5" с заданными значениями температур Ту и Т/ соответственно (рис. 20.3).
В этом случае вместо (20.8) получаем
27т*] = т! +Т" О",
(20.11)
467
где @91 и О" — суммарные те-
пловые потоки, поступающие
в область У через участки 5"
и 51 ее поверхности соответ-
ственно, причем
9! = [ УТ" па,
5
=
[ ХУТ* 45.
ре
5"
ДЬ)=о
Рис. 20.3
Согласно условию сохранения тепловой энергии при стационарном процессе теплопроводности, @1 + 97 =0.
Поэтому,
учитывая (20.11), получаем
ТТ»
1
=-0@1 1=2 а
Отсюда, вытекает формула, для термического сопротивления
В
т! — т"
О
—
(т —_ т")?
277
(20.12)
области У между изотермическими участками 51 и 5! поверхности 5.
Из
(20.7) и (20.12)
следует двусторонняя
оценка для
термического сопротивления:
т
эт
ты
от
““® эпт,а
(20.13)
3. В области У отсутствуют внутреннис источники тепло(9у(М) =0, МЕУ), участок 51 поверхности 5 являстся
изотермическим (11 (Р) = 7! = сопз6,
РЕ 51), а на участках 55
происходит теплообмен с внешней средой, температуру которой принимаем за нуль отсчета, т.е. /2(Р) =0, РЕ 5> (рис. 20.4).
468
20. ДВУСТОРОННИЕ
ОЦЕНКИВ ТЕПЛОПРОВОДНОСТИ
Рис.
20.4
При таких условиях от участка 51 через участок 52 к
внешней среде будет проходить, согласно (20.8), тепловой поток
[Г
вая = 27 1.
Я = [ут
(20.14)
ТП
51
а суммарное термическое сопротивление теплопередаче между
участком 5: с температурой
температурой будет равно:
Т! и внешней
ТТ
средой
Т?
о
2Т*]
с нулевой
(20.15)
Используя (20.7), (20.14) и (20.15), запишем двусторонние оцен-
ки для теплового потока
ПТ,т а
т
9
5952
<
и для суммарного термического сопротивления
4. Пусть по-прежнему в области У отсутствуют внутренние
источники тспла (4у(М) =0,
МЕУ)}, но отсутствует также и
469
участок 51 поверхности 5, а участок 52, на котором, согласно
(20.3), происходит теплообмен с коэффициентом теплообмена,
@«(Р), состоит из двух частей:
на части 55 теплообмен проис-
ходит с внешней средой, температуру которой примем за нуль
отсчета, т.е. »(Р) =0,
РЕ 55; на остальной части 55 = 52 \ 55
имсем /2(Р) = 4 = с0086 (рис. 20.5).
(Р)=4, =сопя
ОР)
Рис.
При
указанных
условиях
из
20.5
(20.8)
можно
найти
среднюю
температуру участка 55:
т, — вх [т 9-2
(20.16)
Из (20.7) и (20.16) следует двусторонняя оценка для этой температуры:
ТР]
=
«<
4255
ИТ,
а
4252
Если на участке 55 происходит теплообмен со средой, имс-
ющей температуру Ти, т.е. 42 =аТ,,
где @ — постоянный на
этом участке коэффициент теплообмена, то, используя (20.16),
можно найти передаваемый через 55 суммарный тепловой поток
0 =а/(Т'-Т,)5% = а! 9% +2
т
Те
(20.17)
470
20. ДВУСТОРОННИЕ
и суммарное
термическое
В ИИ
0
ОЦЕНКИВ ТЕПЛОПРОВОДНОСТИ
сопротивление
Те
ат +2Лт*ИГи
Отсюда, учитывая (20.7), получаем
суммарного теплового потока,
„т, Ч
(20.18)
двусторонние
т.ч
+а/Т.55 < 95 < 2
оценки
для
+755
с
и для суммарного термического сопротивления теплопередачи
1
<<
а" +2 ТТУ ^^
1
ТЕ +21Т, а] Ти
Пример
20.1.
Рассмотрим тепловыделяющий элемент,
представляющий собой стержень с поперечным сечением в виде правильного шестиугольника,
(рис. 20.6).
Построим двустороннюю оценку средней по сечению температуры 7 при условии, что коэффициент теплопро-
водности Л материала стержня и мощность ду энерговыделения
постоянны
сечении
такого
в
поперечном
шестигранного
стержня. Заданнос значение Ть
температуры поверхности этого
Рис. 20.6
стержня примем за нуль отсчета
температуры.
В силу симметрии сечения стержня относительно прямых,
проходящих через противоположные вершины шестиугольника и через ссредины сго противоположных сторон достаточно рассмотреть один из 12 треугольников, заштрихованный
на рис. 20.6. Площадь этого треугольника Е = 82/(2\/3), где
В — радиус окружности, вписанной в шестиугольник.
Для
471
функционала (20.4) в качестве допустимого распределения тсемпсратуры сначала возьмем следующсс:
Т(м) = ССВ? - 12),
МФ
уЕЕ.
(20.19)
Постоянную Ст определим из необходимого условия минимума
функционала (20.4) после подстановки в него (20.19):
В
Г. ау-—
2
=2^0?
2) 4
под
х/
0
Е
Отсюда, следует, что
Эт _ Ви
ао
ААС
=1 д
—
1-95)
= 0,
или С1 = 4//(4А)., что соответствует значению
функционала
(20.4) и, согласно
‚В?
Л = _@ и
2
(20.10), нижней оценке средней
температуры
=ТТ =-2
Л
УЕ
=
ду В? = 0,125 ду В?
.
8А
(20.20)
у
Несложно проверить, что распределение
ду
(М) = Уфу),
Мау см,
вектора плотности теплового потока с проекциями 4. = дух/2
и 4, = 9у5/2 на оси координат Ох и Оу соответственно удовлетворяет первому из условий (20.6) и поэтому может быть
472
20. ДВУСТОРОННИЕ
использовано
в качестве
(20.5):
--
ОПЕНКИ В ТЕПЛОПРОВОДНОСТИ
допустимого
=)
‹
[5
]
Этому значению, согласно
средней температуры
т+
4
для
функционала
(4уВ?)?
+ 4?)
4тау
= —5- ААУ
4) ат4у
(20.10),
п _ 54?
36) ^”
ЕР
отвечает
верхняя
7
х
вида
—
1
оценка
(20.21)
Таким образом, учитывая (20.20) и (20.21), получаем двустороннюю опенку для средней температуры поперечного сечения
шестигранного тепловыделяющего элемента в виде
УВ"
<Т < 0,139"—
(20.22)
А
Отметим, что замена
с равновеликой площадью
= \/12Е/я = В\/2УЗ/л
шестигранного стержня круглым
поперечного сечения радиуса то =
приводит
к значению
средней
темпе-
ратуры
т, _ 970 _ УЗ ЧУВ?
о
Л
и
лежащему в найденных пределах (20.22) довольно близко к
верхней границе.
Распределение температуры (20.19) является достаточно
грубым. Следует ожидать, что его уточнение уменьшит „вилку“, определяемую двусторонними оценками средней температуры Т. Для уточнения допустимого распределения температуры в поперечном сечении шестигранного стержня построим
уравнение 4(т, у) = 0 контура этого сечения в виде произведе-
473
ния уравнений сторон шсетиугольника
А: Аз
А2
Аз
(см. рис. 20.6):
2В-х-
УЗи=0,
2В+=-
УЗу=0,
АзА4
2В+т
Ал А5
2В-+#+УЗу=0,
Ав
2В-х
Ал
=0,
= 0,
так что в итоге получим
ф(т, у) = (В? =?) (2В+ т)? —3у”) ((2В—=)? 3”)
=0.
(20.23)
Уравнения сторон записаны таким образом, что при смещении
точки внутрь шестиугольника левая часть уравнений становится положительной.
Поэтому
шсстиугольника 4(х, у) > 0.
для любой
внутренней
точки
Примем допустимое распределение температуры в виде
Т2(М) = СФ, у), М
) ЕР, и после сго подстановки с
учетом (20.23) в функционал (20.4) вычислим
ли = зы = | (ть? -чуть)ав =
ЕР
_ 2 (ее (24
п вау—
Е
— аи 05 [ (т, у) дтау = 42 Л20ЪЛВ"? — 1,809С54уВ8 = Л.
Е
Из условия ЭЛТЬ|/9С5 =0 найдем Со = 0,02124у /(^В“) и затем Л = -0,0192(4у В?)?/Х.
Тогда, согласно
(20.10), получим
уточненную нижнюю границу Т’ = 0,1334" В?/Л для средней
температуры Т. Таким образом, „вилка“, определяемая двусторонними оценками, стала, более узкой.
474
20. ДВУСТОРОННИЕ
ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
Дальнейшее уточнение нижной границы для средней темпсратуры можно получить, ссли представить распределение
температуры в виде ряда
Т(М) = че, у
Степени
ие+ау-апау-+ т
х и у и их произведения
Ноу +...).
образуют
в данном
(20.24)
случае
полную систему функций, а наличие сомножителя (т, у) обеспечивает равенство нулю температуры по контуру поперечного
сечения, т.е. распределение (20.24) является допустимым для
функционала (20.4) при любых значениях коэффициентов ад,
51, с ит.д. Вместо степенного ряда в (20.24) можно использовать тригонометрический ряд.
СПИСОК РЕКОМЕНДУЕМОЙ
ЛИТЕРАТУРЫ
Учебники
и учебные
пособия
Алексеев В.М., Тихомиров В.М., Фомин С.В. Оптимальное управление.
Наука, 1979. 429 с.
Атиезер Н.Н. Лекции по вариационному исчислению. М.: Гостехтеоретиздат, 1955. 248 с.
Березин Н.С., Жидков Н.П. Методы вычислений. Т.2, М.: Физматгиз,
1962. 639 с.
Блисс Г.А. Лекции по вариапионному исчислению. М.: Изд-во иностр.
лит., 1950. 347 с.
Буслаев В.С. Вариационное исчисление. Л.: Изд-во Ленингр. ун-та,
1980. 288 с.
М.:
Будеольц
Н.Н.
Основной
курс
теоретической
механики.
Ч.
1.
М.:
Наука, 1965. 467 с; 1.2. М.: Наука, 1966. 332 с.
Гельфанд И.М., Фомин С.В. Вариационное исчисление. М.: Физматгиз, 1961. 228 с.
Гюнтер Н.М. Курс вариационного исчисления.
М.: Гостехтеоретиздат, 1941. 308 с.
Зарубин В.С., Селиванов С.С. Вариационные и численные методы
механики сплошной среды. М.: Изд-во МГТУ, 1993. 358 с.
Колмогоров А.Н., Фомин С.В. Элементы теории функций и функционального анализа. М.: Наука, 1989. 623 с.
Коши А. Вариационное исчисление: Пер. с венгер.
М.: Высш. шк.,
1983.
280 с.
Кротов В.Ф., Лагота Б.А., Лобанов С.М., Данилина Н.И., Сергеев
С.И. Основы теории оптимального управления. М.: Высш. шк., 1990. 429 с.
Лаврентьев М.А., Люстернив Л.А. Курс вариационного исчисления.
М.; Л.: Гостехтеоретиздат, 1950. 296 с.
Михглин С.Г. Вариационные методы в математической физике.
М;:
ГТТИ, 1957. 476 с.
Понтрягин Л.С., Болтянский В.Г., Гомкрелидзе Р.В., Мищенко Е.Ф.
Математическая теория оптимальных процессов. М.: Наука, 1983. 392 с.
Ройтенберг Я.Н. Автоматическое управление. М.: Наука, 1978. 551 с.
476
СПИСОК
Смирнов
РЕКОМЕНДУЕМОЙ
В.И. Курс высшей
ЛИТЕРАТУРЫ
математики.
Т. 4.
Ч. 1. М.:
Наука,
1974.
336 с.
Смирнов
В.И., Крымов
ние. Л.: КУБУЧ,
В.И., Канторович
Л.В. Вариационное
исчисле-
1933. 204 с.
Титзонов А.Н., Самарский А.А. Уравнения математической физики. М.:
Наука, 1966. 724 с.
Треногин В.А. Функциональный анализ. М.: Наука, 1980. 496 с.
Эльсгольц Л..Э. Дифференциальные уравнсния и вариационнос исчисление. М.: Наука, 1969. 424 с.
Янг Л. Лекции по вариационному исчислению и оптимальному управлению: Пер. с англ. М.: Мир, 1974. 488 с.
Дополнительная
Бобылев
Н.А., Емельянов
литература
С.В., Коровин
С.К. Геометрические
методы
в вариационных задачах. М.: Магистр, 1998. 658 с.
Брайсон А., Хо Ю-Ши. Прикладная теория оптимального управления:
Пер. с англ. М.: Мир, 1972. 544 с.
Вариационные принципы механики: Сб. / Под ред. /.С. Полака. М.:
Физматгиз, 1959. 932 с.
Вольмир А.С. Устойчивость упругих систем.
М.: Физматгиз, 1963.
879 с.
Галеев Э.М., Тихомиров В.М. Краткий курс теории экстремальных
задач. М.: Изд-во МГУ, 1985. 201 с.
Зарубин В.С. Инженерные методы решения задач тсплопроводности.
М.: Энергоатомиздат, 1983. 328 с.
Зарубин В.С. Прикладные задачи термопрочности элементов конструкций. М.: Машиностроение, 1985. 296 с.
Красовский
А.А. Системы автоматического управления полетом и их
аналитическое конструирование. М.: Наука, 1973. 558 с.
Крылов А.Н. Собрание трудов. Т.7. М.; Л.: Изд-во
АН
СССР,
1936.
696 с.
Лойцянский
Л.Г. Механика
жидкости и газа.
М.:
Наука,
Михлин С.Г. Численная реализация вариационных методов.
1966. 432 с.
Проблемы
Гильберта:
Об.
/ Под
ред.
П.С.
Александрова.
1970.
903 с.
М.: Наука,
М.:
Наука,
1969. 239 с.
Рокафеллар Р.Т. Выпуклый анализ. М.: Мир, 1973. 468 с.
Формальскли! А.М. Управляемость и устойчивость систем с ограниченными ресурсами. М.: Наука, 1973.
477
Четаев
Н.П. Теоретическая механика.
Экланд
И.,
Темам
М.:
Мир,
Пер. с англ.
Эльсгольц
1958.
Л.Э.
Р.
Выпуклый
М.:
анализ
Наука,
367 с.
Вариационное
исчисление.
М.:
Гостехтеоретиздат,
164 с.
Абовский
Н.П., Андреев
издания
и монографии
Н.П., Деруга А.П. Вариационные
теории упругости и теории оболочек.
М.:
Наука,
1978.
Александрова Н.В. Математические термины:
шк., 1978. 190 с.
Атюанс
1968.
М.,
Фалб
П. Оптимальное
Справочник.
управление.
М.:
Беляман Р. Динамическое программирование.
М.:
Высш.
Машиностроение,
М.: Изд-во иностр. лит.,
400 с.
Беллман Р., Дрейфус С. Прикладные задачи
мирования: Пер. с англ. М.: Наука, 1965. 458 с.
Бердичевский
Наука,
В.Л.
1983.
Вариационные
ды.
М.:
М.:
Бчо М. Вариационные
Энергия, 1975. 208 с.
Брониипейн
инженеров
И.Н.,
Р.,
1973.
принципы
програм-
механики
сплошной
теплообмена:
Пер.
сре-
принципы
Семендяев
Кириллова
в теории
К.А.
Справочник
13-е изд., испр.
М.Ф.
Особые
М.:
по
матсматикс
Наука,
оптимальные
с англ.
1986.
для
544 с.
управления.
М.:
256 с.
Грибанов
В.Ф.,
термоупругости.
Коллату
динамического
448 с.
и учащихся втузов.
Габасов
Наука,
М.:
Паничкин
Н.Г.
Связанные
Машиностроение,
1984.
Л. Задачи на собственные
и
динамические
задачи
184 с.
значения:
Пер. с нем.
М.:
Наука,
503 с.
Корн Г., Корн Т. Справочник по математике:
и инженеров:
Пер. с англ.
М.:
Наука,
1973.
Для научных работников
832 с.
Курант Р., Гильберт Д. Методы математической физики:
Т. 1. М.; Л.: ГТТИ, 1934. 532 с.
Ланцощ
К. Вариационные
принципы
механики:
Пер. с англ.
Пер. с англ.
М.:
Мир,
408 с.
Лернер
1970.
принципы
287 с.
764 с.
1960.
1965.
проблемы:
1979, 400 с.
Справочные
1968.
1987.
и вариационные
А.Я.,
Розенман
358 с.
Летов А.М. Динамика
Е.А.
Оптимальнос
полета и управление.
управление.
М.:
Наука,
М.:
1969.
Энергия,
360 с.
478
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Математический энциклопедический словарь / Гл. ред. Ю.В.
М.:
Сов.
энцикл.,
1988.
848
Проторов.
с.
Петров Ю.П. Вариационнысе мстоды тсории оптимального управления.
Л.: Энергия, 1977. 280 с.
Полав Л.С. Вариационные принципы механики, их развитие и применение в физике. М.: Физматгиз, 1960. 599 с.
Работнов Ю.Н. Механика деформируемого твердого тела. М.: Наука,
1979. 745 с.
англ.
Ректорис К. Вариационные
М.: Мир, 1985. 590 с.
методы в матсматичсской
физикс:
Справочник по теории автоматического управления / Под
А.А. Красовского. М.: Наука, 1987. 712 с.
Тимошенко С.П., Гудьер Дж.
Теория упругости: Пер. с англ.
Пер. с
ред.
М.
Наука, 1975. 576 с.
Феодосьев В.И. Сопротивление материалов. М.: Наука, 1979. 559 с.
Цлаф Л.Я. Вариационное исчисление и интегральные уравнения: Справочное руководство. 2-е изд., перераб. М.: Наука, 1970. 192 с.
Черноусько Ф.Л., Баничук Н.В. Вариационныс задачи мсханики и
управления (Численные методы).
М.: Наука, 1973. 238 с.
Задачники
Алексеев
мизации. М.:
Ефимов
анализ (спец.
Краснов
В.М., Галеев Э.М., Тихомиров В.М. Сборник задач по оптиНаука, 1984. 287 с.
А.В., Золотарев Ю.Г., Терпигорева В.М. Математический
разделы). Ч. 2. М.: Высш. шк., 1980. 290 с.
М.Л., Макаренко Г.И., Киселев А.И. Вариационное исчисле-
ние (Задачи и упражнения). М.: Наука, 1973. 192 с.
Сборник задач по математике для втузов. Ч. 4. Методы оптимизации.
Уравнения в частных производных.
Интегральные уравнения:
Учеб.
пособие / Под ред. А.В. Ефимова.
2-е изд., перераб.
М.: Наука, 1990.
304 с.
Периодические
издания
Бернштейн Н.С. Об уравнениях вариационного исчисления // Успехи
матем. наук. 1941. Выш. 8. С. 32-74.
Болтянский В.Г. Достаточные условия оптимальности и обоснование
метода динамического программирования // Изв. АН СССР. Сер. матем.
1964. Т. 28. №3. С. 481-514.
479
Болтянский В.Г., Гамкрелидзе
мальных процессов // ДАН СССР.
Красносельский
Р.В., Понтрягин
1956. Т.110. №1.
М.А. Некоторые
Л.С. К теории оптиС. 7-10.
задачи нелинейного
анализа // Успе-
хи матем. наук. 1954. Т. 9. Выш. 3(61). С. 57-114.
Розоноэр
Л.И.
Принцип
Л.С.
Понтрягина
в теории
оптимальных
си-
стем // Автоматика и телемеханика, 1959, №10, С. 1320-1334; №11, С. 14411458; №12,
С. 1561-1579.
Слободянский
нейных
задачах,
М.Г. Оценка погрешности приближенного решсния в лисводящихся
к
вариационным,
нию двусторонних приближений
// Прикл. математика и механика.
Фельдбаум
А.А.
Оптимальные
А.А.
их
применение
к
определе-
1952. Т. 16. Вып.4. С. 449-464.
процессы
регулирования // Автоматикаи телемеханика.
Фельдбаум
и
в статичсских задачах тсории упругости
О синтезе оптимальных
пространства // Автоматика и телемеханика.
в системах
автоматического
1953. 14. №6.
систем
С. 1561-1580.
с помощью
1955. 16. №2.
фазового
С. 129-149.
ПРЕДМЕТНЫЙ
Акспомы
скалярного
умножения
Г\, 358
Базис
УКАЗАТЕЛЬ
Дифференциал
Дополнение
стандартный
— счетный
[Х,
[\,
Задача
154
—-
856
Брахистохрона
слабый (Гато) 28
ортогональное
Больца,
115
41
на условный
Вариация
допустимая
— фупкции
26
26
—-
вторая
125
—-
первая
28
Ш-14,
—
непрерывная
управляющее
185
Время
свободное
200
Гиперплоскость
248
154
98
Понтрягина
169
114
— оптимальшого
155
Возмущение
159
— о геодезических
кусочио
Воздействие
Майера
41
98
в форме
158
153
Вектор-фупкция
двухточечная
— Лаграпжа
151
скорости
— фазовый
исчислепия
46
— изоперимегрическая
869
79
75
простейшая
ненулевой
фазовой
концами
98
границами
— вариациоппого
83
—
— управления
экстремум
с подвижными
—---
— фупкциопала
Вектор
—-
373
115
элементарная
— вариациоппая
П, 17
ТУ,
линиях
103
управлепия
151,
153
—--—
—
линейная
186
оптимальной
— сиптеза
стабилизации
оптимальпых
306
управлепий
164
Гиперповерхность
Градиент
— с0 свободным
248
функции
\, 925
концами
возмушенное
305
165
—-
— невозмущенное
305
— управления
объекта.
153
—-
по Гамильгону
Дифференциал
полный
— сильный (Фреше)
27
407
УП,
305
— с фиксированным
— лимитационнос
Деиствие
—
50
фиксированными
Закон
—
255
концами
159
160
Лиувилля
движения
Значение
временем
158
многоточечная
Штурма
159
(скользящими)
160
— стабилизации
Дьижение
концом
— с подвижными
ХТ, ХП,
152, 156
собственное
Г\, 196
975
481
Интеграл
Гильберта,
инвариантный
Мегод
139
— Лебега 1Х
—
первый
системы
Иптеграит
ОДУ
УШЩ,
68
30
Ин’гервал
времени
Комбинация
управления
линейная
159
векторов
Ш, №
Кривая
фазовые
гладкая
П,
интегральная
—
89
УТ,
квадратов
ХТ,
— Ритца
ХШ,
960
Методы
прямые
68
ХШ,
Минимум
сильный 33
— слабый
33
— строгий
всюду
— выпуклое
ХГУ, 342
ГХ, ХПТ,
интегральный
— компакгное
смешанный
качества
162
интегральный
—-
энергегический
—
конечного
—
опгимального
317
315
1-189, ХПТ,
по энергии
ТХ,
374
374
— (лебеговой) меры нуль [Х, 316
152, 160
—-
[Х, 318
плотное
1-186, 574
—-—
314
липеипое
Множество
— измеримое
161
968
33
— замкнутос
квадратичный
—-—
107
— наименьших
153
фазовая
Критерий
153
369
Лагранжа
Мпогообразие
Координаты
—
Куран'га
— множителей
ограниченное
161
1-183, 574
— предкомпактное
162
— управлепий
состояния
162
Множители
быстродействия
Модель
374
допустимых
Лагранжа
154
101
математическая
ХХ,
156
161
“Лаграпжиан
Лемма
Наклон
101
вариационного
осповпая
Лагранжа
Линия
Неравенство
слабый
Матрица
— евклидова
У, 21
244
сильный
Грама
—
диагональная
ГУ,
—
невырожденная
\, 925
внешняя
370
353
определения оператора,
314
— управлепия
379
247
Оболочка линейная системы
Ш
элементов
154
— управляемости
965
векторов
динамического
конечных
Нормаль
ХШ,
программирования
—
ХТ,
33
66
[\,
оператора,
— энергегическая
Область
Гессе \,
ГУ, 343
[\, 515
ограниченного
33
—
Метод
38
геодезическая
Максимум
‘греугольника
Норма 1\, [Х, 28
36
переключений
—
136
исчисления
36
Дюбуа-Реймона
—
поля экстремалей
Невязка, 357
Объект
274
ХШ,
969
Г\,
378
летерминированный
— управляемый
151
152
482
ПРЕДМЕТНЫЙ
Ограничение
—-
на управление
фазовые
— фазовое
координаты
ХПТ,
— сходящаяся
325
Принцип
318
(вполие
непрерывный)
ХИ,
374
820
Г,
318
дифференциальный
— неотрицательный
— ограпичениый
Гамильгона
—
двойственности
—
максимума
ХТ, 320
—ХИТ,
323
— положительный
ХТ,
— самосопряженный
— симметрический
ХТ,
— тождественный
322
Лиувилля
Х],
матрицы
Ш
Отображение
(функция)
875
1-70
полное
— фазовое
Параметр
управляющий
Переключение
Переменные
67
\, 22
— кусочно
гладкая
допустимый
У, 925
136
193
161
— ортогонализации
Грама
—
1\У
Режим особый 265, 267
операторпого
—--
обобщеппое
—--
приближеппое
Ряд Фурье
уравпепия
356
356
357
[Х, 957
собственное
ГУ, 373
Поле экстремалей
1-243, 374
354
158
оптимальный
— оптимальный
классическое
Подпоследовательность
Подпространство
ТХ, 315
315
Решепие
У, 28
ГУ
ГУ, [Х, 29
ХПТ,
Шмидта
203
— гладкая
оператора
154
канонические
ТХ, 356
— энергетическое
216
— сопряженные
Поверхность
230
84
арифметическое
— функциональное
Процесс
ТХ,
153
— локально
т-мерпый
925
ГХ, 24
—-
—
\,
— гильбертово
сепарабельное
в
68
банахово
— нормированное
ГУ, 377
Оипрсделитель
УШЩ,
по направлению
— евклидово
ТУ
353
полная
Пространство
—-
322
ХТ,
функции
силу системы
определенный
274
скалярное
Производная
спизу 371
Параллелепипед
112
198, 205
энергетическое
372
315
112
407
Произведение
370
— положительно
— Штурма
—
ТХ, 317
1-232, 1Х,
взаимности
— оптимальности
ХТ,
352
поточечно
— фундаментальная
в липейпом
простраистве
—-—
Последовательность
минимизирующая
УП,
— компактный
линейный
98
314
действующий
— Лаиласа
нормированного
(свклидова) пространства ХШ,
т
фазовые
— Гамильтопа
—
Пополнение
154
154
Ограничения
Оператор
155
УКАЗАТЕЛЬ
Связи
—
голономные
98
дифференциальные
98
483
Связи
интегральные
Граектория
(изопериметрические)
Связь
обратная
—-
независимая
цравленио
допустимое
156
УШ,
—-
184
152, 161
по быстродействию
203
— особое
управляемая
151, 187, 187
— программное
условий
Эйлера
функций
Уравнение
101
ортонормированная
ТХ,
кобка
Соотношение
69
начальное
фазовое
—
157
оптимальная
в целом
(отображения)
по эпергии
ХЦ,
—
Эйлера —
— Якоби
1-73, 189
Пуассона
Г[Х, 316
—-
приближения
Эйлера задачи
о квадратичном
— неявной
Точка
функции
переключения
сопряженная
стациопарпая
угловая
131,
краевое
естественное
УШ,
У
— общности
положения
230
— отражения
Т, 86
слабого
156
90
минимума
достаточное
132
фазовая (изображаютная)
153
— трансверсальности
экстремума
33
— экстремума
Грасктория
225
87
— преломления
41
функционала
оитимальная
161
107
76
132, 145
— начальное
134
107
задачи
130
усиленное
фупкциопала
185
Лагранжа
326
132,
движения
изонериметрической
Условие
ХЛШ,
62
возмущенного
первого
—
353
фупкциопале
65
820
132
— Лежандра
"Теорема
У!
319
184, 306
в среднем
квадратичном
ХТ,
Остроградского
Уравнения
функционала,
Схолимость
65
приближения
Эйлера 47
307
Сужение
ХП,
— Пуассона
153
Стабилизация
328
— опораторное
280, 283
187
290
328
голономнос
— линейного
Беллмана
рекуррентное
Состояние
Селлмана,
Лапласа
134
Пуассона
233
системы
— вариационное
—-
357
Якоби
163, 239
Управляемость
59
161
266
— экстремальное
184
полная
управлению
154
сопряженная
уравнений
=
У
—
— оптимальное
175
автономная
— линейная
153
240
липейпо
ГУ
гамильгонова,
фазовая
соответствующая
157
240
Сииптез управления
с ‚истема векторов
(ОДУ)
98
необходимое
85, 250
функционала
35, 58, 87
484
ПРЕДМЕТНЫЙ
Условие
—-
Якоби
усиленное
Условия
136
Функционал
132
Вейерпгграсса,
—
Эрдмана
— связи 97
управления
смешанный
—-
термипальшый
Функция
267
билинейная
— каноническая
Г\, 129
уравнений
Эйлера.
68
Формула
—-
Грина УП,
64
Беллмана
—
Вейерпетрасса,
—
Гамильтона
—
гладкая
—
допустимая
—
измеримая
16
22
[Х, ХШ,
—
комилексного
—-
первая УП,
325
—
кусочно
—
Лаграпжа
—
Понптрягипа
Гаусса
УП,
Формулировка
прикладной
вариациоппая
Фупкциопал
строго
101
50
длифференцируемый
164, 240
с квадратом
[Х, 84,
—---
и весом
ТХ, 316
Цель
управления
152
Экстремаль 7, 59, 62, 65
лифференцируемый
в точке
27
положительно
сильно
—
определенный
определенный
положительный
— Лагранжа
387
— липейцый
24
— непрерывный
терминальный
97
126
включеппая
в
поле
экстремалей
136
124, 326
неогрицагельно
— целевой
суммируемая
389
задачи
Лагранжа,
Эксгремум
124
—-
38
в
124
Дирихле
— квадратичный
—-
107
175, 204
915
—
—
101,
Х, 292
93
343
дважды
точке
—
342
— вырожденный
—
385
123
— вспомогательный
— выпуклый
гладкая
пробная
916
переменного
синтезирующая
альтерпативпый
— билинейный
—-
задачи
328
141
67
324
—
Х, 252
285
УП,
340
353
—
вгорая
Остроградского
114
аналитическая
——
интегральный
114
— эпергии ХШ,
особого
(режима)
Форма
целевой
114
93
Участок
УКАЗАТЕЛЬ
124
сильный
101
33
— слабый 33
— условный
Элемент
У, 107
оператора
собственный
хш, 369
в точке
162
26
&-окрестпость
—
слабая
26
сильпая
26
ОГЛАВЛЕНИЕ
Предисловие
Основные
обозначения
ЧАСТЬ
ОННОЕ
Т. КЛАССИЧЕСКОЕ
ИСЧИСЛЕНИЕ
1.
ВАРИАЦИ-
Основные понятия
1.1. Задачи, приводящие к вариационным проблемам
1.2. Основные определения „еее.
1.3.
Основные
1.4.
Некоторые
леммы
вариационного
замечания
о задачах
исчисления
.
.....
вариационного
исчи-
2.
Вариационные задачи с фиксированными границами
2.1. Простейшая задача вариационного исчисления. ...
2.2. Функционалы от нескольких функций. ........
2.3. Функционалы с производными высшего порядка
2.4. Функционалы от функций многих переменных
2.5. Каноническии вид уравнений Эилера
.........
Вопросы и задачи... еее.
3.
Вариационные задачи с подвижными границами
3.1. Задача с подвижными концами... ..........
3.2. Задача с подвижными границами
...........
3.3. Экстремали с угловыми точками... .........
Вопросы и задачи...
еее
еее
4.
Задачи
4.1.
4.2.
4.3.
4.4.
4.5.
на условный экстремум
Основные типы задач
Необходимые условия
Необходимые условия
Некоторые примеры
Принпип взаимности
на условный экстремум
в задаче Лагранжа. ......
в изопериметрической задаче .
.... еее.
.
в изопериметрических задачах
100
105
109
112
486
ОГЛАВЛЕНИЕ
4.6.
Задача Больца и задача Майера
............
Вопросы и задачи...
еее
еее
Достаточные условия экстремума
5.1. Слабый экстремум
еее
еее,
5.2. Условие Якоби...
еее
еее
5.3. Инвариантный интеграл Гильберта
..........
5.4. Сильный экстремум
еее
иена.
Вопросы и задачи...
еее
еее
ЧАСТЬ
НИЕ
Вариационные
методы
6.1.
6.2.
6.3.
задачи
Постановка
оптимальном
оптимального
Задача Лагранжа в форме
Некоторые
задачи
вариационном
6.4.
6.5.
в
Линойныс
Обсуждение
с
Вопросы и задачи...
Понтрягина........
.
.
оптимального
методов
управлении
управления
ограничениями
исчислении
задачи
УПРАВЛЕ-
в
классическом
еее
управления
вариационного
еее
.....
исчисления
еее
еее
...
нее
мяча
ю
Принцип максимума
7.1. Автономная система управления. Формулировка принципа максимума...
еее
еее.
Обсуждение принципа максимума ...........
Задача быстродействия
.. еее.
.
Линеиная задача оптимального быстродеиствия ...
Задача синтеза управления
...............
Задача с подвижными концами... ..........
Нсавтономные системы
„еее
еее.
Понятие особого управления
..............
Вопросы и задачи... еее
©:
Я
@<
<
ны а
6.
П. ОПТИМАЛЬНОЕ
Метод динамического программирования
8.1. Принцип оптимальности . ‚ее...
8.2. Уравнение Беллмана ...
еее
еее
8.3. Уравнение Беллмана в задаче быстродеиствия ....
8.4. Связь метода динамического программирования с принципом максимума... еее
Д.8.1. Оптимальная стабилизация „ее...
Вопросы и задачи...
еее
нее
ЧАСТЬ Ш. ПРЯМЫЕ МЕТОДЫ
ЦИОННОГО ИСЧИСЛЕНИЯ
9.
ВАРИА-
Формулировка вариационных задач
9.1. Операторное уравнение
.................
9.2. Вариационное уравнение. ‚еее...
9.3. Примеры построения функционала по вариационному
уравнению ..
еее
еее
9.4. Исследование выпуклости функционала ........
Вопросы и задачи...
еее
еее
10. Методы решения вариационных задач
10.1. Минимизирующие последовательности
........
10.2. Методы приближенного решения вариационных задач
10.3. Собственные значения симметрического оператора, .
10.4. Приближенное решение задачи на собственные значеНИЯ
еее
еее еее нение
Вопросы и задачи...
еее
еее.
11. Двойственные вариационные задачи
11.1. Альтернативные функционалы ........:....
11.2. Построение альтернативного функционала ......
11.3. Оценка погрешности приближенного решения ....
Вопросы и задачи... еее
ЧАСТЬ ТУ. ПРИЛОЖЕНИЯ
ОННЫХ МЕТОДОВ
12. Принцип
Гамильтона
13. Колебания
струны
14. Колебания
мембраны
15. Уравнения
движения
16. Аэродинамическая
17. Вопросы
ВАРИАЦИ-
идеальной
задача
жидкости
Ньютона
устойчивости конструкций
18. Вариационные
стильяно
принципы Лагранжа,
19. Вариационные
принципы
20 . Двусторонние
оценки
Список
рекомендуемой
Предметный
указатель
Рейсснера и Ка-
термоупругости
в теплопроводности
литературы
360
369
Учебное
Математика
издание
в техническом
Выпуск
Ванько
Вячеслав
Ермошина
Кувыркин
университете
ХУ
Иванович
Олеся Владимировна
Георгий Николаевич
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
И ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
Редактор #.В. Авалова
Художник С.С. Водчиц
Оригинал-макот подготовлен в издательстве
МГТУ
им. Н.Э.
под руководством
Баумана
А.Н. Канатникова
Сапитарпо-эпидемиологическое заключепие
№ 77.99.02.953.Д.008880.09.06 ог 29.09.2006 г.
Подписано в печать 27.10.2006.
Печать офсетная.
Усл. печ. л. 30,5.
Тираж 1000 экз.
Формат
60х88
Бумага офсетная,
Уч.-изд. л. 30,31.
Заказ №
Издательство МГТУ им. Н.Э. Баумана,
105005, Москва, 2-я Бауманская, 5.
Отпетаталю
с
готовых
диапозитивов
Издательской группой «Логос»
на базе ООО «Печатный Дом «Современник»
105318, Москва, Измайловское ш., 4.
445043, г. Тольятти, Южное шоссе, 30.
ПИ
3703'826270
1/16.