Документ 642550
реклама

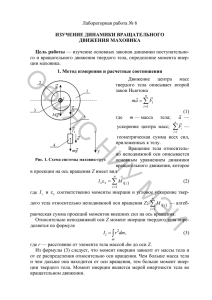
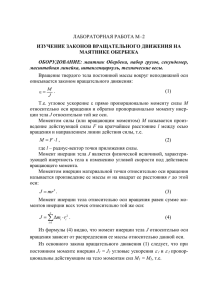
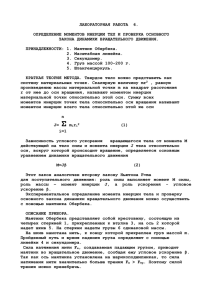
Лабораторная работа № 16 ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МАХОВИКА Цель работы – экспериментальное определение момента инерции маховика, состоящего из диска, шкива и вала. 1. Теоретические основы работы Аналогом второго закона Ньютона, справедливого для описания поступательного движения тела массой m N ma Fi (1) i 1 во вращательном движении является основное уравнение динамики вращательного движения N J z z M i z (2) i 1 где J z и z соответственно момент инерции и угловое ускорение твердого N тела относительно неподвижной оси вращения z, M i z – алгебраическая i 1 сумма моментов сил относительно оси z. Сравнительный анализ уравнений (1) и (2) показывает, что роль массы в поступательном движении играет момент инерции тела во вращательном движении. А поскольку масса является мерой инертности тела в поступательном движении, то момент инерции является также мерой инертности тела во вращательном движении. В этом заключается физический смысл момента инерции. Относительно неподвижной оси z момент инерции твердого тела определяется по формуле (3) J z r 2 dm , m где r является кратчайшим расстоянием от элемента тела массой dm до оси z. Из формулы (3) следует, что момент инерции зависит от массы тела и от ее распределения относительно оси вращения. Чем больше масса тела и чем дальше она находится от оси вращения, тем больше момент инерции твердого тела и наоборот. Рассмотрим маховик (рис.1), состоящий из диска, шкива и вала. Предположим, что они обладают общей массой М. Диск и шкив насажены на общий вал, закрепленный в подшипниках. Маховик может вращаться 1 относительно оси z, совпадающей с осью вала (на рис.1 ось z перпендикулярна плоскости чертежа и направлена «от нас»). Рис.1 Схема системы маховик-груз (вал на схеме не показан) Вращение маховика осуществляется под действием груза массой m1, укрепленного на нити, намотанной на шкив, и описывается относительно неподвижной оси z уравнением (4) J z M i z , i где J z момент инерции маховика, – его угловое ускорение, M i z – i сумма моментов сил, действующих на маховик. M i z включает момент i силы натяжения нити М(Т2) и момент силы трения М(Fтр) в подшипниках вала. Моменты сил N и Мg относительно оси z равны нулю. Таким образом J z T2 r M Fтр . (5) Поступательное движение груза массой m1 описывается вторым законом Ньютона m1a m1g T1 , (6) где а является ускорением центра масс груза, Т1 – силой натяжения нити, приложенной к грузу. В проекции на ось у уравнение (6) принимает вид (7) m1a m1g T1 Так как предполагается, что нить нерастяжима и невесома, то ускорение всех точек нити и груза одинаковы, причем в отсутствии проскальзывания нити линейное (тангенциальное) ускорение обода диска 2 равно ускорению груза. Силы натяжения нити Т1 и Т2 равны между собой (Т1 = Т2 = Т). Предположим, что груз в процессе движения всей системы опускается до некоторого нулевого уровня с высоты h1. Тогда с учетом, что где – время движения груза, а a 2 , h1 2 (8) a r ; (9) имеем r 2 h1 2 Из уравнения (5) находим Jz . (10) Tr M Fтр . (11) Силу натяжения Т выражаем из уравнения (7), а угловое ускорение – из (10). Затем полученные формулы для Т и подставляем в (11). В итоге получаем m1gr M Fтр r 2 m1r 2 . (12) Jz 2 h 1 Для расчета J z нужно знать все величины, входящие в формулу (12). Они определяются экспериментально: r – с помощью штангенциркуля, h1 – с помощью линейки, – с помощью секундомера. Масса груза m1 изначально задана. Момент силы трения M Fтр определяется опытным путем. Для этого груз еще раз поднимают на первоначальную высоту h1 (одновременно наматывая нить на шкив маховика), а затем предоставляют его самому себе. Груз сначала опускается на h1 до нижней точки – нулевого отсчета высоты (нить при этом сматывается со шкива), а затем (когда нить начинает наматываться на шкив) поднимается на меньшую высоту h2 . Спуск и подъем груза происходят в течение некоторого времени 2 . Причиной подъема груза на меньшую высоту является наличие силы трения в подшипниках вала. Потеря механической энергии системы Wмех определяется работой силы трения A Fтр Wмех A Fтр . (13) Так как начальная и конечная кинетические энергии Wk1 и Wk 2 равны нулю, то изменение механической энергии системы равно изменению только потенциальной энергии груза Wмех Wn 2 Wn1 . (14) 3 и Работа силы трения выражается через момент силы трения M Fтр угловое перемещение маховика : A Fтр M Fтр . (15) Приравнивая правые части уравнений (14) и (15), имеем Wn 2 Wn1 M Fтр или m1gh2 m1gh1 M Fтр . (16) Угловое перемещение маховика равно отношению длины дуги, которую опишут за время поворота 2 точки обода шкива, к его радиусу: h1 h2 . r (17) Подставляя в уравнение (16), имеем M Fтр m1g h1 h2 r . h1 h2 (18) И, наконец, подставляя выражения для M Fтр в уравнение (12), получаем формулу для определения экспериментального значения момента инерции маховика 2 g 2 h2 J zэ m1r 1 . h1 h1 h2 (19) Экспериментально определенное значение Jzэ можно сравнить с теоретическим значением того же момента инерции Jzт, рассчитанного по формуле J z т J z диска J z шкива J z вала . Так как материал, из которого изготовлен шкив, обладает гораздо меньшей плотностью, чем плотность стальных диска и вала, то моментом инерции шкива Jz шкива можно пренебречь. Сам диск можно представить в виде совокупности двух элементов (см.раздел 2: «описание экспериментальной установки»). Поэтому J z т J zm.д J zк J z вала , где J zm.д M 2 R12 R22 M1R22 – момент инерции тонкого диска, J zк – 2 2 момент инерции кольца (здесь М1 и М2 являются соответственно массами тонкого диска и кольца, R1 – внешний радиус тонкого диска и одновременно внутренний радиус кольца, R2 – внешний радиус кольца). Окончательно 4 J zт 2 2 M1R22 M 2 R1 R2 J z вала . 2 2 (20) Данные установки представлены в разделе 2. 2. Описание экспериментальной установки Схема экспериментальной установки приведена на рис.2. Основными ее элементами являются: диск 1, шкив 2 и груз 3. Груз подвешен на нити, намотанной на шкив. Диск вместе со шкивом смонтированы на едином соосным с ними валу 4. Вал крепится в подшипниках 5. Для регистрации местоположения груза в установке предусмотрена вертикально расположенная линейка 6. Все элементы установки смонтированы на массивной металлической опоре. Рис. 2. Схема экспериментальной установки Диск 1 представляет собой единую конструкцию в виде фигуры вращения. Диск для удобства расчета его момента инерции условно можно разделить на два отдельных элемента: тонкий диск (рис.3) и кольцо (рис.4): 5 Рис.3. Тонкий диск массой M1 Рис.4. Кольцо массой M 2 (Напоминаем, что моменты инерции этих тел не зависят от их толщины). 3. Порядок выполнения работы 1. Заполните табл.1 спецификации измерительных приборов. Внесите в протокол данные установки. Таблица 1 Спецификация измерительных приборов Название прибора и его тип Линейка Секундомер Штангенциркуль Масса груза Момент инерции вала Масса тонкого диска Радиус Масса кольца Радиус Пределы измерения Цена деления Инструментальная погрешность Данные установки: m1 = Jzвала = 1,3610–4 кгм2 M1 = 2,91 кг R1 = 162,0 мм M 2 = 9,92 кг R2 = 122,5 мм m1 = Jzвала = M1 = R1 = 0,25 мм М2 = R2 = 0,25 мм 2. С помощью штангенциркуля измерьте диаметр шкива d, значение диаметра запишите в табл.2. При построении таблицы предусмотрите необходимое для записи измерений число строк. Таблица 2 Измерение времени движения груза , диаметр шкива d и высот h1 и h2 № , с h1, мм h2, мм d, мм r, мм 3. Проверьте, чтобы нижняя торцевая поверхность груза при полностью размотанной нити, к которой он подвешен, находилась на уровне 6 нулевой отметки на шкале линейки (в противном случае за нулевую отметку примите то деление шкалы линейки, которое соответствует положению нижнего торца груза, когда нить полностью размотана). 4. Намотайте нить на шкив таким образом, чтобы нижняя торцевая поверхность груза располагалась напротив отметки на линейке, соответствующей высоте h1 (значение h1 согласуйте с преподавателем). 5. Предоставьте груз самому себе (отпустите), тем самым, заставив маховик вращаться; одновременно включите секундомер. 6. Выключите секундомер в момент достижения грузом нулевой отметки на шкале линейки. Полученное время движения груза внесите в табл.2. Проделайте эксперимент по измерению диаметра шкива d (п.2) и по измерению времени (п.п. 4,5,6) еще 4 раза. Всего измерений как d, так и должно быть пять. Все измеренные значения d и внесите в табл.2. 7. Поднимите груз на высоту h1 (одновременно наматывая нить на шкив) и вновь предоставьте его самому себе (отпустите). Наблюдая за поступательным движением груза, зафиксируйте максимальную высоту h2, на которую поднимется груз после прохождения им нулевой отметки на шкале линейки. Этот эксперимент повторите еще 4 раза. Значения h2 (всего 5 значений) внесите в табл.2. 4. Обработка результатов измерений 1. Рассчитайте значения радиуса шкива r r d и внесите их в 2 табл.2. 2. Используя данные, приведенные в табл.2, вычислите средние значения времени , высот h1 и h2, радиуса r. Эти значения внесите в нижнюю строчку табл.2. 3. С учетом средних значений величин , h1, h2 и r рассчитайте экспериментальное значение момента инерции маховика по формуле (19). 4. Рассчитайте теоретическое значение момента инерции маховика из уравнения (20). (Расчеты должны быть последовательными и должны включать буквенные обозначения величин и их численные значения. Это указание в полной мере относится и к расчетам погрешностей величин. Все расчеты должны быть выполнены в протоколе лабораторной работы). 5. Рассчитайте погрешность экспериментального значения момента инерции маховика по формуле: 2 2 m r 2 g 2 h 2h h m r 2 g 2 m1r 2 g h2 1 2 1 2 2 2 2 2 2 2 J э J э m1 4 J э r 2 h1 1 2 h h h 2 h h 2 h1 h1 h2 1 1 2 1 2 2 h22 7 6. Рассчитайте погрешность теоретического значения момента инерции маховика по формуле: J T R22 R12 R24 2 M1 4 4 2 2 M 22 J вала M 2 R1 R12 M 2 R2 M1 R2 R22 . 2 2 7. Окончательные результаты для экспериментальных и теоретических значений Jz запишите в стандартном виде J zэ J zэ J zэ J zт J zт J zт и приведите друг под другом. 5. Контрольные вопросы. 1. Как определяется момент инерции материальной точки, системы материальных точек, твердого тела? 2. От чего зависит момент инерции твердого тела массой m относительно данной оси вращения z? 3. Каков физический смысл момента инерции твердого тела? 4. Дайте определение момента силы относительно полюса и неподвижной оси. 5. Каким образом в работе определяется работа сил трения в подшипниках вала? 6. Получите уравнение для расчета момента инерции маховика, пренебрегая трением в подшипниках вала. 8