Дальневосточный федеральный университет
Инженерная школа
ЛАБОРАТОРНЫЕ РАБОТЫ
ПО ТЕХНОЛОГИИ СУДОСТРОЕНИЯ И СУДОРЕМОНТА
Часть 2
Тепловая резка
Учебное электронное издание
Учебно-методическое пособие
Составители
А.А. Гутник, Л.И. Чехранова
Владивосток
Дальневосточный федеральный университет
2018
УДК 656.135.073 (076)
ББК 39.33-082.03
Л12
Составители
Гутник Алексей Алексеевич, старший преподаватель
Чехранова Лидия Игоревна, к.т.н., доцент
Кафедра кораблестроения и океанотехники Инженерной школы
Дальневосточный федеральный университет
Лабораторные работы по технологии судостроения и судоремонта. Ч. 2. Тепловая
резка: учебно-методическое пособие [Электронный ресурс] / сост. А.А. Гутник,
Л.И. Чехранова; Инженерная школа ДВФУ. – Электрон. дан. – Владивосток: Дальневост.
федерал. ун-т, 2018. – [83 с.]. – 1 CD. – Систем. требования: процессор с частотой 1,3 ГГц
(Intel, AMD); оперативная память от 1 ГБ, Windows (XP; Vista; 7 и т.п.); Acrobat Reader, Foxit
Reader либо любой другой их аналог. – ISBN 978-5-7444-4379-5
В пособии даются рекомендации по подготовке и защите лабораторных работ по курсу
«Технология судостроения и судоремонта», содержатся краткие теоретические сведения по
темам лабораторных работ, приводятся методы составления управляющих программ для
машин с ЧПУ и правила оформления полученных результатов.
Предназначено для студентов направления 26.03.02 «Кораблестроение, океанотехника и
системотехника объектов морской инфраструктуры».
Ключевые слова: тепловая резка, кислородная резка, плазменная резка, лазерная резка,
линейная интерполяция, круговая интерполяция, координатные слова, карты раскроя,
тепловые деформации.
Публикуется по решению кафедры кораблестроения и океанотехники
Инженерной школы ДВФУ
Редактор И.А. Гончарук
Компьютерная верстка И.А. Гончарук
Дизайн CD Г.П. Писарева
Опубликовано 15.10.2018
Формат PDF
Объем 6,3 МБ [Усл. печ. л. 9,7]
Тираж 30 экз.
Заказ 455
Издание подготовлено редакционно-издательским отделом Инженерной школы ДВФУ
[Кампус ДВФУ, корп. С, каб. С714]
Дальневосточный федеральный университет
690091, Владивосток, ул. Суханова, 8
Изготовитель CD: Дальневосточный федеральный университет
(типография Издательства ДВФУ 690091, г. Владивосток, ул. Пушкинская, 10)
ISBN 978-5-7444-4379-5
© ФГАОУ ВО «ДВФУ», 2018
Содержание
Введение .................................................................................................................................................. 4
1. Лабораторная работа № 1 ................................................................................................................... 6
1.1. Общие сведения ........................................................................................................................... 6
1.2. Порядок проведения работы .................................................................................................... 26
1.3. Контрольные вопросы .............................................................................................................. 26
2. Лабораторная работа № 2 ................................................................................................................. 28
2.1. Общие сведения....................................................................................................................................28
2.2. Порядок проведения работы .................................................................................................... 38
2.3. Контрольные вопросы .............................................................................................................. 38
3. Лабораторная работа № 3 ................................................................................................................. 39
3.1. Общие сведения....................................................................................................................................39
3.2. Порядок проведения работы .............................................................................................................42
3.3. Контрольные вопросы ........................................................................................................................42
4. Лабораторная работа № 4 ................................................................................................................. 43
4.1. Общие сведения ......................................................................................................................... 43
4.2. Порядок проведения работы .................................................................................................... 57
4.3. Контрольные вопросы .............................................................................................................. 58
Список литературы ............................................................................................................................... 59
Приложение 1. Оформление титульного листа отчета по лабораторным работам ........................ 60
Приложение 2. Задания для лабораторной работы № 1 .................................................................... 61
Приложение 3. Задания для лабораторной работы № 2 .................................................................... 65
Приложение 4. Варианты раскроя листов № 3 .................................................................................. 75
Приложение 5. Задания для лабораторной работы № 4 .................................................................... 80
3
Введение
Основным направлением автоматизации корпусообрабатывающего производства
является внедрение технологического оборудования с системами программного управления
(ПУ), которые позволят обеспечить высокую точность обработки, требуемую универсальность
и быструю переналаживаемость. Системы ПУ делятся на цикловые (ЦПУ), числовые (ЧПУ) и
системы с прямым управлением от электронных вычислительных машин (ЧПУ-ЭВМ).
В системах с ЧПУ программируются рабочие циклы и режим технологического
процесса. Размерная информация о координатах или величинах перемещения задается
аналоговыми средствами или с помощью копировальных систем.
Системы с ЧПУ обеспечивают автоматическое программное управление
технологическим процессом (траектория перемещения рабочего органа, скорость, режим
работы, вспомогательные операции и др.), основываясь на цифровых, буквенных и других
символах, которые однозначно определяют информацию управляющего алгоритма.
Системы с ЧПУ-ЭВМ включают центральную ЭВМ, выполняющую обработку и
распределение информации управляющих программ на группу машин или технологическую
линию. Особенностью этих систем является иерархический (многоранговый) принцип
выполнения вычислительно-логических операций. Низкий ранг формирует в реальном
масштабе времени сигналы управления приводами. Следующий ранг представляет собой
управляющую микроЭВМ, которая в режиме разделения времени генерирует команды
управления устройствами более низкого ранга. Более высокие ранги управления связаны с
использованием многомашинного принципа работы нескольких ЭВМ, обеспечивающих
одновременное выполнение большой технологической задачи.
Несмотря на активизацию процессов технологического перевооружения верфей, на
производственных мощностях сохраняются станки советского образца, нуждающиеся в замене.
Спрос на новейшие модели металлорежущих станков и обрабатывающих центров с ЧПУ еще
значительно превалирует над предложением.
Целью настоящего лабораторного практикума является освоение принципов
функционирования систем с ЧПУ применительно к тепловой резке деталей судового корпуса. В
процессе выполнения работ студент осваивает принципы управления двухкоординатными
перемещениями на плоскости, составление управляющих программ для отечественных
газорезательных машин типа «Кристалл», лазерной технологической установки «Спектр» и
3D моделирование деталей для системы ARC1200. Управляющие программы для этой системы
составляются с использованием программного продукта «Компас-3D». Для программирования
используется стандартный код ISO. Этот комплекс оборудован системой автоматического
программирования, позволяющий выполнять CAD/CAM операции во время обработки.
Возможно отображение двух- и трехмерных чертежей на экране.
В результате выполнения лабораторного практикума студент должен закрепить
теоретические знания по теме «Тепловая резка», приобрести умения составлять управляющие
программы для отечественных газорезательных машин типа «Кристалл», лазерной
технологической установки «Спектр», формировать карты раскроя, а также освоить навыки
3D моделированя деталей для системы ARC1200.
При выполнении лабораторного практикума перед студентами ставятся следующие задачи.
4
1. Научиться составлять управляющие программы для газорезательных машин типа
«Кристалл».
2. Научиться составлять управляющие программы для лазерной установки «Спектр».
3. Уметь учитывать очередность вырезки деталей при формировании карт раскроя с
целью повышения точности вырезаемых деталей.
4. Приобрести навыки 3D моделирования деталей для системы ARC1200 с
использованием программного продукта «Компас-3D».
Лабораторные работы выполняются бригадами студентов из двух человек, которые
формируются из состава учебной группы. Преподавателем назначаются руководитель бригады
и технолог-программист.
В начале занятия преподаватель проводит выборочный опрос по теме с целью оценки
уровня подготовки студентов к предстоящей работе и при необходимости дополняет и уточняет
их ответы. К выполнению лабораторных работ допускаются бригады, прошедшие инструктаж
по требованиям безопасности.
Перед началом работ исполнители должны ознакомиться с содержанием и условиями
выполнения данной лабораторной работы, с ее техническим обеспечением, подготовить
необходимый инструмент и компьютер (система AutoCAD), программный продукт «Компас
3D», листы форматов А3 и А4. Ознакомление с требованиями безопасности и соблюдение их
при выполнении лабораторных работ обеспечивает заведующий лабораторией в соответствии с
действующей инструкцией.
Содержание конкретной лабораторной работы указано в ее описании. Составление
управляющих программ, проектирование последовательности вырезки деталей, 3D
моделирование деталей для системы ARC1200 с использованием программного продукта
«Компас-3D» и оформление отчета производятся во время проведения лабораторных работ.
Выполнение графической части осуществляется с соблюдением требований ЕСКД.
Оформленный отчет бригада студентов в конце занятий (или в часы консультаций)
представляет преподавателю. При этом студенты бригады должны ответить на заданные
преподавателем вопросы, касающиеся содержания выполненной работы.
Отчет выполняется по установленной форме. В отчет должны входить разделы:
учебная цель;
состав, задачи;
техническое обеспечение работы;
содержание работы;
выводы.
Форма оформления титульного листа представлена в прил. 1.
Опрос выполняется по контрольным вопросам, приведенным в конце каждой
лабораторной работы.
При готовом, выполненном по установленной форме отчете и удовлетворительном
ответе на контрольные вопросы каждый студент бригады получает отметку «зачтено».
5
Лабораторная работа № 1
Программное управление процессом вырезки деталей судового корпуса
из листового проката на машинах «Кристалл»
Цель работы: ознакомление студентов с работой газорезательной машины «Кристалл»,
приобретение навыков составления управляющих программ тепловой резки для машин с ЧПУ
типа «Кристалл».
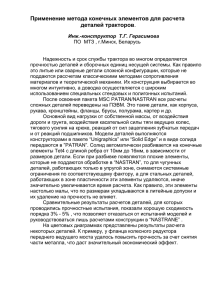
Исходные данные: чертеж детали (рис. 1.1) скопировать из прил. 2. Номер детали
выдается преподавателем. Графическое построение детали выполняется на листах формата А4.
Рис. 1.1. Чертеж детали
1.1. Общие сведения
В судостроении наибольшее распространение получили два вида тепловой резки:
кислородная и плазменная. По всем показателям плазменная резка имеет преимущество по
сравнению с кислородной: ее относительная скорость в 3,5 раза выше, а стоимость в 2 раза
меньше. Однако оборудование для нее более сложное и дорогое, поэтому кислородная резка
пока занимает ведущее положение.
Кислородная резка в зависимости от источника подогревающего пламени
подразделяется на: газовую (кислородно-ацетиленовая, пропан-бутановая, природным газом –
метаном), кислородно-жидкостную (керосин, бензин) и кислородно-флюсовую (смесь
железного порошка, кварцевого порошка, феррофтора и алюминия с размерами частиц от 0,1
до 0,25 мм).
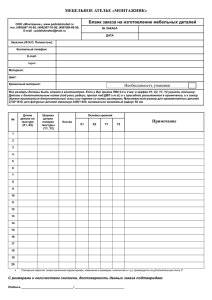
Физическая сущность процесса кислородной резки базируется на способности металлов
при нагреве до температуры воспламенения, лежащей ниже температуры плавления, сгорать в
струе кислорода и выделять при этом значительное количество тепла (рис. 1.2). Для ведения
процесса кислородной резки необходимо, чтобы температура плавления металла была выше
температуры его воспламенения, а температура плавления образующихся при резке окислов
была ниже температуры плавления основного металла. Окислы металла должны быть
достаточно жидкотекучими, а теплопроводность металла не должна быть столь велика, чтобы
6
препятствовать концентрации тепла, необходимой для нормального протекания процесса.
Металлы, не удовлетворяющие хотя бы одному из указанных требований, не могут быть
разрезаны газом и кислородно-жидкостным способом. К числу таких металлов относятся стали
с высоким (свыше 0,7%) содержанием углерода, высокохромистые стали, чугун, а также
алюминий, медь и их сплавы.
Рис. 1.2. Схема процесса кислородной резки:
1 – подогревающее пламя, 2 – «режущий кислород», 3 – подвод кислорода, 4 – подвод горючего газа,
5 – смесь горючего газа с кислородом, 6 – зона нагрева металла, 7 – зона самоподогрева, 8 – грат, 9 – окислы,
10 – разрезаемый металл
Существенным недостатком, снижающим эффективность кислородной резки, является
образование на нижних кромках вырезаемых деталей слоя шлака (грата), основной причиной
возникновения которого является неокисленное железо.
Для получения резов с чистыми (безгратовыми) кромками необходимо:
применять кислород возможно большей чистоты (не ниже 99,5%);
использовать минимальные мощности подогревающего пламени;
поддерживать постоянное расстояние между резаком и поверхностью разрезаемого
металла;
поддерживать неизменным давление газов и скорость перемещения резака;
снижать на 15–20% скорость резки по сравнению с обычной резкой.
Кислород чистотой 99,7–99,9% позволяет выполнять безгратовую резку, не уменьшая ее
скорости.
При кислородной резке листов толщиной 4–5 мм следует применять кислород чистотой
не менее 99,5% при пониженном давлении его до 0,3 МПа. Для уменьшения оплавления кромок
мощность пламени устанавливается минимальной при максимально возможной скорости резки.
7
Производительность и качество кислородной резки во многом зависит от чистоты
кислорода. Повышение чистоты кислорода с 99,0 до 99,8% позволяет увеличить скорость резки
на 20–25%, а также добиться устранения грата, удаляемого вручную.
Кислородная резка применяется как раздельная, когда результатом обработки является
узкий сквозной прорез на всю толщину металла, и как поверхностная, при которой с
поверхности обрабатываемого изделия снимается только слой металла.
Процесс разделительной резки заключается в том, что сначала поверхность металла
нагревается до температуры воспламенения, затем на нее направляется струя кислорода и
металл загорается. Тепло, выделяющееся при сгорании металла, передается нижележащим
слоям металла, которые также воспламеняются в струе кислорода и сгорают. Когда металл
загорится на месте начала реза по всей толщине разрезаемого изделия, начинают перемещать
резак вдоль линии реза. Окислы металла (шлак) удаляются механическим воздействием
кислородной струи. Процесс резки осуществляется резаком инжекторной конструкции,
включающей наружный и внутренний мундштуки.
Основные параметры режима кислородной резки, влияющие на эффективность процесса
(производительность и качество): мощность подогревающего пламени, давление и расход
кислорода, скорость перемещения режущей струи по контуру вырезаемой детали (скорость
резки).
Чем выше температура пламени, тем быстрее нагревается металл до температуры
воспламенения его в кислороде и тем выше скорость резки.
Часть деталей корпуса судна имеет скос кромок под сварку. В зависимости от толщины
металла, требований к сварным швам и условий сварки скос кромок может быть
односторонним или двусторонним с притуплением и без притупления. Величины притупления
и допускаемые отклонения на них регламентированы ГОСТ 5264-80 – ручная дуговая сварка,
ГОСТ 8713-79 – автоматическая и полуавтоматическая сварка под флюсом и ГОСТ 14771-76 –
дуговая сварка в защитном газе. Величины расстояний от линии начала скоса до контура детали
регламентированы стандартом.
Кислородная (газовая и кислородно-жидкостная) резка применяется на стационарных и
переносных машинах при изготовлении деталей из углеродистых и низколегированных сталей с
разделкой и без разделки кромок под сварку.
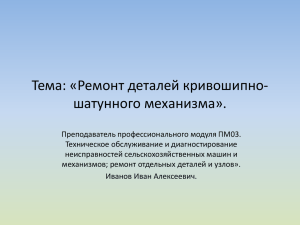
Плазменная резка представляет собой процесс, в котором при одновременном
воздействии мощного электрического дугового разряда и высокоскоростного газового потока,
локализованных на малом участке поверхности, проплавляется металл и удаляется из зоны
расплавления (рис. 1.3).
Универсальный процесс плазменной резки приводит к уменьшению тепловых
деформаций вырезаемых деталей, так как его погонная энергия меньше, чем при кислородной
резке. Грат при резке почти отсутствует. Однако при резке образуются озон, окись азота и
другие вещества, вредно влияющие на организм человека. Раскроечные столы должны
снабжаться эффективной вентиляцией.
Режущим инструментом при плазменной резке служит струя плазмы, температура
которой составляет 10 000 ⁰C и выше в зависимости от состава и расхода плазмообразующего
газа и степени обжатия ее газовой струей. Струя плазмы возникает при обжатии столба дуги в
канале сопла плазмотрона, представляющего собой газоразрядное устройство для получения
низкотемпературной плазмы (T ≈ 10 000 ⁰C).
8
Недостатком плазменной резки является увеличение содержания азота в слоях металла
вблизи реза. Это приводит к образованию пористости сварки под флюсом. Для устранения
газонасыщения кромок применяют плазменную резку, при которой в качестве
плазмообразующего газа используют смесь воздуха и кислорода с водой.
Рис. 1.3. Схема процесса плазменной резки:
1 – сопло с водяным охлаждением, 2 – плазмообразующий газ, 3 – вольфрамовый электрод, 4 – режущая
плазменная дуга, 5 – выдуваемый металл, 6 – разрезаемый лист
Резка металлов осуществляется на постоянном токе сжатой плазменной дугой прямого
действия, когда дуга горит между анодом (разрезаемым металлом) и катодом (электродом
плазмотрона).
Плазменная дуга прямого действия совмещена со столбом электрической дуги и имеет
более высокую температуру и тепловую мощность по сравнению с плазменной дугой
косвенного действия, когда тепловая энергия от дуги к обрабатываемому изделию передается
только струей плазмы. В плазмотронах с дугой прямого действия температура и скорость
истечения плазменной струи уменьшается. В плазмотронах с дугой косвенного действия столб
плазмы цилиндрической формы расположен внутри плазмотрона. Температура, диаметр
электропроводного канала и скорость истечения струи плазмы по мере ее удаления от среза
сопла резко уменьшаются.
Эффективный коэффициент полезного действия нагрева изделия для дуги прямого
действия составляет 70–80 и для дуги косвенного действия 30–40%.
Резке из заготовок подвергаются все без исключения детали корпуса судна. Выбор
основного способа резки зависит от габаритных размеров, толщины и количества одинаковых
изготовляемых деталей, их материала и оснащенности корпусообрабатывающего цеха.
Некоторые общие рекомендации приведены в табл. 1.1, 1.2, 1.3.
9
К параметрам режима плазменной резки относятся:
напряжения дуги;
сила тока;
диаметр сопла;
скорость резки;
расход плазмообразующих газов.
Таблица 1.1
Рекомендации по применению способов резки листовой стали
Толщина
листов, мм
<4
4–12
вид резки
Криволинейные
Криволинейные и все детали с вырезами
внутренними и по контуру
12
+
Рекомендуемые
Кромки деталей
Любые
оборудование
Лазерная
Стационарная машина
Тепловая +
Стационарная машина
Тепловая
Стационарная машина
При толщине от 4 до 30 мм – плазменная, свыше 30 мм – кислородная резка
Таблица 1.2
Сравнение способов тепловой резки металлов
Вид резки
Материалы,
подвергающиеся
резке
Диапазоны толщин
при резке углеродистой
стали, мм
Показатели резки
малоуглеродистой стали толщиной
10 мм
освоенные
предельные
значения
относительная
скорость
относительная
стоимость
Кислородная
Малоуглеродистые и
низколегированные
стали, сплавы титана
5–100
0,05–1500
1
1
Плазменная
Все
конструкционные
металлы
3–50
1–200
3,5
0,5
Лазерная
То же
0,5–10
0,01–30
0,6
2,5
Таблица 1.3
Скорость основных видов тепловой резки малоуглеродистой стали, мм/мин
Толщина металла, мм
Вид резки
5
10
15
20
25
Ацетилено-кислородная (обычная)
650
550
500
450
410
30
380
То же безгратовая при чистоте кислорода 99,2%
470
370
330
290
270
260
То же при 99,7–99,9%
615
545
500
360
350
310
Плазменная в среде воздуха
5000
2000
1500
1100
800
650
10
Плазменная резка всех марок углеродистых и низколегированных корпусных сталей
толщиной до 30 мм, при изготовлении деталей без разделки кромок под сварку, производится
на стационарных машинах. Резка алюминия, нержавеющей стали, меди и их сплавов
выполняется на стационарных и переносных машинах и ручным способом.
В зависимости от способа выполнения тепловой резки (механизированная и ручная)
применяются следующие виды оборудования: для механизированной резки – стационарные и
переносные машины, для ручной резки – ручные резаки с питающей их аппаратурой.
Наиболее широкое применение для тепловой фигурной резки в отечественном
судостроении получили стационарные машины портального типа, обладающие
преимуществами:
высокой точностью вырезаемых деталей;
большой скоростью резки;
возможностью одновременной обработки нескольких листов, небольшой занимаемой
площадью.
В качестве плазмообразующих газов при резке малоуглеродистых и низколегированных
сталей применяют кислород и воздух, очищенный от масла и влаги, количество которой не
должно превышать 0,2 ч/л воздуха. При резке нержавеющей стали, меди и ее сплавов
используются технический азот и смесь аргона с водородом и азотом. Для резки алюминия и
его сплавов – смесь аргона с водородом, допускается применять азот и воздух.
По скорости плазменной резки корпусные материалы располагаются в такой
последовательности: с наибольшей скоростью разрезаются алюминиевые сплавы; затем
углеродистые; низколегированные, легированные и нержавеющие стали; c наименьшей
скоростью – чугун, латунь и медь. Замедление скорости резки вызывается совместным
влиянием температуры плавления металла, его теплоемкостью и теплопроводностью.
Технология плазменной резки малоуглеродистых, низколегированных и легированных
корпусных сталей практически одинакова.
Резка металла в диапазоне толщин 6–30 мм выполняется обычно при постоянной
регулировке аппаратуры, изменяется только скорость движения резака, уменьшаясь с
возрастанием толщины металла. Напряжение дуги используется только для контроля за
правильным протеканием процесса: отклонение напряжения за заданные пределы указывает на
несоблюдение какого-либо исходного параметра (изменение расхода воздуха, расстояние от
резака до листа и т.д.), а также сигнализирует о необходимости проверки отдельных
составляющих процесса резки.
Время пробивки металла зависит от толщины разрезаемого металла. При ручном
управлении момент начала движения резака определяется визуально; при программном
управлении время пробивки задается регулировкой реле времени (для сталей толщиной
6–20 мм она составляет примерно 2 с). При резке на стационарных и переносных машинах
максимальная толщина пробиваемого листа принята равной 30 мм для всех металлов, при
необходимости резки металла большей толщины в нем следует просверлить отверстие
диаметром не менее 6 мм. Расстояние от места пробивки до контура вырезаемой детали при
плазменной резке приведено в табл. 1.4.
При внедрении этих машин основное внимание следует уделять применению
плазменных источников тепла, при использовании которых в сочетании с математическими
11
методами подготовки исходных данных для программирования достигаются наивысшая
точность вырезаемых деталей и высокая производительность резки.
Машины для кислородной фигурной резки деталей рекомендуются только в тех случаях,
когда не могут быть применены машины для плазменной резки.
Наиболее прогрессивной системой контурного управления машиной является числовая
программа, обеспечивающая наивысшую точность размеров деталей и эффективность их
тепловой вырезки.
Таблица 1.4
Расстояние от места пробивки до контура детали
Толщина разрезаемого
металла, мм
≤ 15
16–20
21–30
31–50
Расстояние до места
пробивки, мм
5-6
6–7
7–8
9–10
Правильность выбора скорости резки определяется визуально:
при нормальной скорости передняя граница факела близка к вертикали;
при недостаточной скорости она отклоняется в сторону направления резки;
при завышенной скорости плазменная струя отклонена в сторону,
противоположную направлению движения резака.
После воздушно-дуговой строжки поверхность кромок, как правило, должна зачищаться
наждачным кругом до полного удаления окалины, шлака и цветов побежалости, особенно на
коррозионно-стойких сталях аустенитного класса и двухслойных сталях типа КД со стороны
плакирующего слоя. На углеродистых и низколегированных сталях иногда достаточно зачистки
металлической щеткой.
С точки зрения количества одновременно обрабатываемых листов наиболее
эффективными являются машины для одновременной обработки двух – четырех листов. В
старых действующих цехах предприятий они не могут быть рационально размещены и
загружены. При создании новых корпусообрабатывающих цехов предпочтение следует
отдавать многоместным машинам портального типа.
Способ выполнения плазовых работ налагает определенные требования к системе
управления машинами для тепловой резки. Так как математические методы плазовых работ
получают всё большее распространение в судостроении, то машины с числовым программным
управлением являются наиболее перспективными.
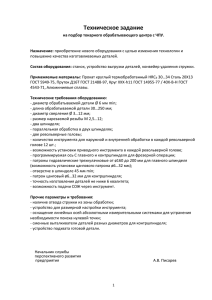
Все машины с программным управлением имеют общее название «Кристалл» (рис. 1.4).
Входящие в название буквы означают: Т – машина рассчитана на вырезку деталей высокой
точности; Пл – машины плазменной резки; К – машина кислородной резки; цифра указывает
максимальную ширину разрезаемого листа в метрах.
В конструктивном отношении машины «Кристалл ТК», предназначенные для
кислородной резки, незначительно отличаются от плазменных машин «Кристалл ТПл» и
снабжены поворотным трехрезаковым блоком для вырезки деталей со скосом кромок.
Механическая часть машины и система управления изменениям не подвергаются. Из комплекта
поставки исключаются только источник питания режущей дуги и шкаф управления дугой.
12
Одним из основных узлов машины для плазменной резки металла является плазмотрон.
По стабилизации плазмообразующего газа плазмотроны подразделяются на два типа:
с аксиальной подачей газа, когда он пропускается вдоль оси катода, охлаждает его и
выходит через отверстие сопла;
с вихревой подачей газа, когда он поступает в камеру через отверстия, расположенные
тангенциально (по касательной) к оси плазмотрона, и двигается по спирали вокруг
столба дуги, образуя вихревой поток.
Важным узлом машины является интерполятор, который служит для расшифровки
считанной с перфоленты информации и выработки необходимых импульсов. В настоящее
время применяются линейно-круговые интерполяторы, позволяющие существенно упростить
программирование благодаря исключению операции аппроксимации дуг окружностей
ломаными линиями. Это дает возможность в случае необходимости программировать вручную
контуры простых деталей, значительно сократить длину программы и время ее составления,
повысить точность вырезаемых деталей вследствие ликвидации «изломов» кромок, особенно
заметных на вырезах с небольшими радиусами.
Рис. 1.4. Машина с ЧПУ «Кристалл»
При выборе стационарного оборудования для тепловой резки корпусных сталей следует
руководствоваться следующими положениями.
1. По конструктивной схеме следует отдавать предпочтение портальному типу
стационарных машин как наиболее перспективному и широко применяемому в производстве;
2. Для вырезки деталей сложной формы предпочтительней система контурного
управления с числовой программой, обеспечивающей максимальную механизацию работ и
наибольшую точность вырезаемых деталей. Фотопроекционная система контурного управления
должна применяться только в тех случаях, когда невозможно получить на предприятии
числовые программы.
13
3. Многоместные машины для одновременной резки нескольких листов являются
эффективными только при соответствующей загрузке и организации работ на них.
4. Для оснащения новых поточно-механизированных линий тепловой вырезки деталей
сложной формы следует отдавать предпочтение машинам с числовым программным
управлением:
для вырезки деталей по контуру без разделки кромок под сварку – плазменные
машины типов «Кристалл» и «Зенит»;
для вырезки деталей по контуру с одновременным снятием фасок под сварку –
кислородные машины тех же типов, возможно применение машин типа «Кристалл»
и «Зенит» с фотоэлектронной системой управления, оснащенных плазменной и
кислородной резкой для вырезки деталей аналогичного назначения;
для вырезки полос и обрезки листов по контуру с одновременным снятием фасок
под сварку следует применять трехпортальные машины типа «Балтика» с
позиционным программным управлением.
Тепловая резка обеспечивает высокое качество поверхности реза, не требует разметки
контуров деталей, позволяет одновременно вырезать несколько деталей, имеет высокий
коэффициент использования оборудования. Возможна автоматизация процесса вырезки деталей
и организация гибких автоматических линий.
Составление управляющей программы выполняется для машины «Кристалл ТПл–2,5»,
предназначенной для плазменной вырезки деталей без разделки кромок под сварку из стали
любых марок, а также для сплавов на основе меди и алюминия. Машина используется
автономно на участках тепловой резки металлов.
Машина «Кристалл ТПл–2,5» имеет систему с ЧПУ. Исходными данными для
разработки управляющих программ являются карты раскроя, определяющие положение
вырезаемых деталей на листе металла. В качестве программоносителей для машины
используют перфоленты.
Машина состоит из исполнительного механизма, управляемого цифровой системой
программного управления, рельсового пути, подвода питания и блока агрегатов. Для получения
плазменной дуги используется установка АПР-403У4.
Части машины смонтированы в портале, перемещающемся на четырех опорных катках
по рельсовому пути. Управление машиной осуществляется с пульта управления,
расположенного на портале.
Исполнительный механизм, перемещающийся по рельсовому пути, имеет портал, по
направляющим которого перемещается каретка поперечного хода с установленным на ней
блоком плазменного резака. На правой опорной тележке портала крепится пульт управления
машины, оборудованный поворачивающимся креслом. Перемещение портала и каретки
осуществляется по программе, записанной бумажной перфоленте (рис. 1.5). Для возбуждения
режущей дуги используется осциллятор. Установленный на каретке привод подъема служит для
подъема и опускания блока плазменного резака. Управление работой привода подъема
осуществляется как в ручном режиме с пульта управления, так и в автоматическом в процессе
резки деталей при поддержании стабильности положения резака над поверхностью листа.
14
Рис. 1.5. Стандартная восьмидорожечная перфолента
с основными размерами и нанесенным кадром управляющей программы:
1 – отверстия транспортной дорожки, 2 – рабочие отверстия
Плазменный резак имеет корпус из изоляционного материала, в котором расположен
токоподвод со сменным электродом, имеющим вставку из циркония. На токоподводе выполнена
специальная резьба для завихрения потока воздуха, стабилизирующего режущую дугу.
Пульт управления машиной представляет собой металлический каркас, прикрепленный к
литому корпусу опорной тележки, в которой расположены:
интерполятор линейно-круговой, предназначенный для преобразования информации,
записанной на перфоленте;
устройство фотосчитывающее ФСУ-1М, служащее для ввода в интерполятор
информации, записанной на перфоленте;
плата реле;
плата усилителей;
нагревающее устройство с термореле и вентилятором.
Органы управления машиной расположены на панели управления, разбитой по
функциональным признакам на несколько групп:
пульт системы программного управления;
пульт плазменной резки;
15
пульт интерполятора;
пульт настройки.
Для создания безопасных условий работы на машине необходимо:
предусмотреть заземление всех узлов, которые могут оказаться под напряжением;
укрыть защитными кожухами все токоведущие и вращающиеся части машины;
установить конечные упоры и выключатели для предотвращения схода каретки с
направляющих и машины с рельсового пути;
производить управление машиной с пульта управления;
установить сигнальные лампы для световой сигнализации;
оборудовать раскроечный стол вытяжной вентиляцией;
закрыть плазменный резак глухим кожухом;
допускать к работе на машине рабочих не моложе 18 лет, прошедших специальное
обучение,
получивших
соответствующее
удостоверение
и
имеющих
квалификационную группу по технике безопасности;
обеспечить рабочих, обслуживающих машину, спецодеждой и защитными
индивидуальными средствами, в том числе сварочной маской, очками со
светофильтром, ковриками;
запрещать работать на машине при выключенных сигнальных лампах;
запрещать работать на машине со снятыми предусмотренными конструкцией
оградительными кожухами для вращающихся частей, токоведущих частей,
электродвигателей, электроустройств и других опасных зон;
защитить от механических повреждений и высокой температуры электрические
провода и кабели для питания электродвигателей машины надежной изоляцией;
при временном прекращении работ на машине, а также при ремонте или осмотре на
рукоятке включения блока питания вывесить табличку – «Не включать – работают люди».
Управление рабочим циклом при вырезке деталей из листового проката на машинах с
ЧПУ производится по двум координатам. Точность воспроизведения контура детали зависит от
вида входной функции и от динамических характеристик привода. Для получения заданной
точности представление задающего входного воздействия в виде импульсов унитарного кода
позволяет согласовать этот сигнал с динамическими характеристиками исполнительных
устройств. Преобразование кодов управляющей программы в унитарный код осуществляется с
помощью интерполятора.
Интерполяторы по виду интерполирующего многочлена делятся на линейные, линейноквадратичные и интерполяторы высших порядков. Наиболее просто реализуются линейные
интерполяторы, осуществляющие кусочно-линейную аппроксимацию заданного контура. Для
этого необходимо обеспечить постоянное отношение скоростей перемещения резака по осям Х
и У, равное отношению приращений координат.
Если необходимо переместить резак по отрезку прямой, направленному под углом α к
оси Х, то движение вдоль отрезка осуществляется с постоянной скоростью. Скорости по
отдельным координатам X и У рассчитываются по формуле:
Vx = V * cosα,Vy = V * sinα,
где V – вертикальная скорость перемещения.
16
Основу структурной схемы ЧПУ процессом двухкоординатных перемещений (рис. 1.6)
составляют быстродействующие шаговые двигатели. Информация от программоносителя
поступает в считывающее устройство и с помощью интерполятора преобразуется в
управляющие импульсы, поступающие на вход усилителей мощности. К выходам усилителей
мощности подсоединены обмотки шагового двигателя. Обмотки статора образуют магнитное
поле, под воздействием которого вращается ротор шагового двигателя через гидроусилитель, и
редуктор обеспечивает продольное и поперечное перемещения резака. Таким образом,
вращательное движение ротора преобразуется в поступательно-шаговое перемещение резака.
Рис. 1.6. Структурная схема ЧПУ процессом двух координатных перемещений
Управляющая программа (УП) – это записанная на программоноситель в
закодированном цифровом виде маршрутное операционная технология на конкретную деталь с
указанием траекторий движения инструмента. Изготовление УП (менее трудоемкое и более
дешевое, чем изготовление копир-чертежей) сводится к написанию маршрутно-операционной
технологии, расчетам траекторий перемещения инструментов и записи на программоноситель,
большую часть этой работы можно автоматизировать.
При подготовке УП используют системы координат станка, детали и инструмента. В
соответствии в рекомендациями ISO за стандартную принята система координат станка.
Положительные направления осей координат в станках с ЧПУ определяют по правилу правой
руки. Большой палец указывает положительное направление оси X, указательный – оси Y,
средний – оси Z.
Каждому символу на перфоленте соответствует определенное расположение пробитых
отверстий. При считывании программы на выходе считывающего устройства появляются
командные сигналы. После необходимых преобразований блок согласования направляет
соответствующий сигнал в сравнивающее устройство замкнутой системы (рис. 1.7).
17
Рис. 1.7. Блок-схема замкнутой системы ЧПУ:
1 – считывающее устройство, 2 – программоноситель, 3 – электронный кодовый преобразователь,
4 – сравнивающее устройство, 5 – дешифратор и усилитель, 6 – исполнительный двигатель,
7 – датчик обратной связи
Программа записывается на телеграфной бумаге – пятидорожковой перфоленте шириной
17,5 мм. Каждая команда представляется отдельным кадром. Существует четыре типа кадров:
кадр для отработки прямолинейного участка – 18 строк;
кадр для отработки дуги окружности – 24 строки;
кадр для выполнения технологической команды – 12 строк;
кадр для отработки поворота инструмента вокруг вертикальной оси – 12 строк.
Между кадрами должно быть оставлено не менее двух пробелов. Информация на
перфоленте записывается в двоично-десятичном коде с дополнением до «нечета» (табл. 1.5).
Символы A…F соответствуют двоично-десятичным символам 10…15 (см. табл. 1.5).
Кроме этого для записи информации на перфоленту могут использоваться две «четные»
комбинации Z – конец кадра и К – конец работы программы. В конце программы следует
отперфорировать пустой кадр из восемнадцати колонок и затем через два пробела любую
четную комбинацию – конец программы.
Исходная информация, предназначенная для управления машиной, записывается на
бланках (табл. 1.6). Для каждого кадра на бланке отведена одна строка. Крайние колонки
предназначены для записи номеров кадров и необходимых пояснений. Эта информация не
перфорируется. В середине бланка (колонки 1–24) записывается по одному символу,
перфорируемому в соответствующей строке кадра. В первой колонке всегда перфорируется 0.
Во второй колонке любого кадра записывается код, фиксирующий направление осей
прямоугольной системы координат. Он должен быть записан в начале программы (в первом
кадре, задающем перемещение инструмента, или в любом предшествующем). В последующих
кадрах код системы не указывается (во второй строке кадра указывается 0) до тех пор, пока не
появится необходимость изменить направление осей системы координат (кодирование систем
координат показано в табл. 1.7).
18
Таблица 1.5
Код интерполятора
0
1
2
3
4
5
6
7
8
9
А(10)
B(11)
С(12)
D(13)
Е(14)
F(15)
пробел
К
Z
Исходная информация, предназначенная для управления машиной, записывается на
бланках (табл. 1.6). Для каждого кадра на бланке отведена одна строка. Крайние колонки
предназначены для записи номеров кадров и необходимых пояснений. Эта информация не
перфорируется. В середине бланка (колонки 1–24) записывается по одному символу,
перфорируемому в соответствующей строке кадра. В первой колонке всегда перфорируется 0.
Во второй колонке любого кадра записывается код, фиксирующий направление осей
прямоугольной системы координат. Он должен быть записан в начале программы (в первом
кадре, задающем перемещение инструмента, или в любом предшествующем). В последующих
кадрах код системы не указывается (во второй строке кадра указывается 0) до тех пор, пока не
появится необходимость изменить направление осей системы координат (кодирование систем
координат показано в табл. 1.7).
Пятая строка кадра предназначена для кода технологической команды (табл. 1.8). В
кадрах, задающих перемещение резака в пятой колонке, ставится символ 0.
В конце кадра (в 12, 18 или 24-й колонках) указывается признак конца кадра.
Для программирования перемещений инструмента обрабатываемый контур
представляется участком прямых и дуг окружностей. Каждый участок задается
самостоятельным кадром.
19
Таблица 1.6
Код системы координат
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
I
0
8
1
0
0
0
0
3
0
0
0
0
0
2
0
0
0
Z
II
0
0
1
1
0
0
0
2
0
0
0
0
0
2
0
0
0
Z
III 0
0
1
1
0
0
0
4
0
0
0
0
0
0
0
0
0
Z
IV 0
0
1
3
0
0
0
2
0
0
0
0
0
2
0
0
0
Z
V
0
0
2
0
0
0
0
0
0
0
0
0
3
0
0
0
Z
0
Обход окружности,
признак торможения
Направление начала
движения
Код технологической
команды
Код переключателя
Кодирование движения по прямой
Х Z
Х Y
Y
Величины перемещений по Х и У задаются в количестве импульсов, укладывающихся
на участок. Цена импульса для интерполятора составляет 0,1 мм.
Абсолютные перемещения по прямой записываются в 6–11-й, 12–17-й колонках и
18–23-й (рис. 1.8 и табл. 1.6).
В каждой колонке записывается значение одного десятичного разряда числа. В 11, 17 и
23-м столбцах записываются единицы; в 10, 16 и 22-м – десятки: в 9, 15 и 21-м сотни и т.д.
Таким образом, максимальное перемещение, которое можно задать, – 999 999 импульсов.
Кадр для отработки прямолинейного участка занимает 18 столбцов (табл. 1.6). Величина
перемещения задается приращениями координат по осям X и У. Направление движения
кодируется в четвертой строке. При этом код направления движения получается сложением
двух признаков:
первый признак принимает значение 0, если приращение координаты положительно,
и значение 1, если отрицательно;
второй признак принимает значение 0, если приращение по оси положительно, и
значение 2, если отрицательно.
Кадр для отработки дуги окружности занимает 24 колонки. В колонках 6–11 и 12–17
задаются координаты центра окружности относительно участка начала (рис. 1.9, а). Величина
перемещений задается в столбцах 18–23 абсолютным значением суммы отрабатываемых
перемещений по обеим координатам (рис. 1.9, б). В третьей строке кодируется направление
обхода окружности. Этот код принимает значение 4 при обходе окружности в положительном
20
направлении и значение 2 – в отрицательном. Положительным считается обход против часовой
стрелки в правых системах координат и по часовой – в левых.
Y
(мм)
700
III
600
II
IV
500
400
300
200
I
V
100
100 200 300 400 500 600 700 800 900 1000 1100 X (мм)
Рис. 1.8. К кодированию перемещения по прямой линии
Таблица 1.7
Кодирование направления осей координат
21
Таблица 1.8
Кодирование резки
1
Назначение
команды
Зажечь резак I
2
Погасить резак I
3
Зажечь резак II
4
Погасить резак II
5
Зажечь резак III
6
Погасить резак III
7
Опустить суппорт
Включить режущий
кислород
Выключить режущий кислород и поднять суппорт
Код
команды
Комбинация
отверстий
8
9
Кроме этого для дуги окружности задается направление начала движения в начальной
четверти. Этот код записывается в четвертой строке аналогично кадру прямой. Коды начала
движения показаны на рис. 1.11.
Для плавного набора скорости после резкого изменения движения, когда угол поворота
при переходе от участка к участку > 40 градусов, в предшествующем кадре необходимо
задавать признак торможения. Этот признак заносится в третью строку и имеет значение 1. В
кадрах окружности символ в третьей строке получается сложением признака торможения и
кода обхода окружности (см. рис. 1.9 и табл. 1.9).
Технологические команды отрабатываются линейно-круговым интерполятором при
стоящей машине. Для их задания отводятся кадры по 12 строк. Первая и вторая строка содержат
0 и признак смены направления осей координат.
В третьей колонке записывается признак торможения, если сразу после этой команды
следует кадр, задающий перемещение инструмента для плавного разгона. В четвертой строке
всегда 0.
В пятой колонке записывается код технологической команды, который имеет значения,
приведенные в табл. 1.9.
В строках 6–11 (на месте) кодируется время выполнения команды в импульсах. При этом
цена импульса равна 1/12 с. Время отработки отдельной команды обычно принимается равным
1 с (12 импульсов). Последовательность выполнения технологических команд записывается на
бланке (см. табл. 1.6).
При вырезке деталей со скосом кромок на машинах типа «Кристалл», оборудованных
линейно-круговым интерполятором, программа не должна содержать информации по
управлению поворотом блока резаков. Это делается для того, чтобы проекции наклонных
резаков на деталь были всегда перпендикулярными линии реза. Такое слежение за линией
контура осуществляется автоматически. Однако иногда необходимо выполнить разворот блока
резаков при стоящей машине, например, для обхода углов и раскрутки блока. Для отработки
такого поворота служит кадр с координатой Z.
22
Рис. 1.9. К кодированию перемещения по окружности:
а – определение суммы отрабатываемых перемещений, б – движение по окружности
Кадр для отработки угла поворота состоит из 12 строк. Заполнение первых двух
аналогично любому другому кадру. В третью строку заносится признак кадра Z, имеющий
значение 8. В этой же строке может задаваться признак торможения 1, если вслед за этим
кадром записывается команда движения. В четвертой строке задается признак направления
вращения:
0 – при повороте против часовой стрелки;
1 – по часовой стрелке.
В строках 6–11 задается величина угла поворота в импульсах. Цена импульса – 20.
Пример управляющей программы для машины типа «Кристалл».
Исходные данные: чертеж детали для контрольного примера представлен на рис. 1.10,
управляющая программа для контрольного примера приведена в табл. 1.10.
23
Таблица 1.9
Код системы
координат
Обход окружности,
признак торможения
Направление начала
движения
Код технологической
команды
Код переключателя
Кодирование движения по окружности
Х Z
Х Y
Y
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
1
0
8
2
1
0
0
0
1
0
0
0
0
0
1
0
0
0
0 0 4 0 0 0 Z
2
0
0
5
3
0
0
0
1
5
0
0
0
0
2
0
0
0
0 0 3 5 0 0 Z
3
0
0
2
2
0
0
0
2
5
0
0
0
0
2
5
0
0
0 1 0 0 0 0 Z
R50
24
0
350
s10
450
Рис. 1.10. Размеры детали для контрольного примера
24
Y
+X
+Y
Код 0
X
Y
- X
+Y
К од 1
X
Y
+X
- Y
К од 2
X
Y
- X
- Y
К од 3
X
Рис. 1.11. Кодирование направления начала движения по прямой и окружности
25
Таблица 1.10
Управляющая программа для контрольного примера
Код переключателя
Код системы
координат
Обход окружности,
признак торможения
Направление начала
движения
Код технологической
команды
Бракета
1
2
3
4
5
6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
1
0
8
1
0
0
0 0 3 5 0 0
0
0
0
0
0
0
Z
2
0
0
0
0
0
0 0 4 5 0 0
0
0
0
0
0
0
Z
3
0
0
4
0
0
0 0 0 0 0 0
0
0
0
5
0
0
0
4
0
0
1
0
0
0 0 0 0 0 0
0
0
2
5
0
0
Z
5
0
0
0
0
0
0 0 4 5 0 0
0
0
3
5
0
0
Z
6
0
0
4
1
0
0 0 0 5 0 0
0
0
0
5
0
0
0
7
0
0
1
1
0
0 0 3 5 0 0
0
0
0
0
0
0
Z
8
0
0
0
0
0
0 0 0 0 0 0
0
0
4
5
0
0
Z
9
0
0
4
3
0
0 0 0 5 0 0
0
0
0
5
0
0
0
10
0
0
1
2
0
0 0 0 0 0 0
0
0
2
5
0
0
Z
11
0
0
0
0
0
0 0 0 0 0 0
0
0
0
0
0
0
Z
12
0
0
4
2
0
0 0 0 5 0 0
0
0
0
5
0
0
13
0
0
4
0
0
0 0 2 2 5 0
0
0
1
7
5
14
0
0
0
0
0
0 0 0 0 0 0
0
0
0
0
0
Х Z
Х Y
Y
0
0
5
0
0
Z
0
0
5
0
0
Z
0
0
5
0
0
Z
0
0
0
5
0
0
Z
0
0
0
2
4
0
0
Z
0
Z
1.2. Порядок проведения работы
Лабораторная работа выполняется в приведенной ниже последовательности.
1. Вычертить по указанным (в выданном варианте) размерам деталь на листах формата А4.
2. Составить управляющую программу для газорезательной машины типа «Кристалл».
1.3. Контрольные вопросы для подготовки
к защите лабораторной работы
1. Сущность кислородной резки. Ее достоинства и недостатки.
2. Сущность плазменной резки. Ее достоинства и недостатки.
3. Условия возможности применения кислородной резки.
26
4. Что такое строжка?
5. В чем отличие плазмотрона с дугой прямого действия от плазмотрона с дугой косвенного
действия?
6. Какие машины для тепловой фигурной резки являются перспективными? Обоснуйте.
7. Какая система контурного управления машиной для тепловой резки является прогрессивной?
Обоснуйте.
8. Как расшифровать название машины для тепловой резки?
9. Назовите основные параметры режима кислородной резки.
10. Что такое грат?
11. Какая основная причина образования грата?
12. Что необходимо для получения резов с чистыми кромками?
13. Сущность пакетной вырезки деталей.
14. Что следует делать при кислородной резке стали большой толщины?
15. Назовите параметры режима плазменной резки.
16. Когда возникают деформации изгиба в плоскости листа?
17. Когда возникают деформации изгиба из плоскости листа?
18. Что необходимо делать для уменьшения тепловых деформаций вырезаемых деталей?
19. Каков алгоритм составления управляющей программы для машины «Кристалл»?
27
Лабораторная работа № 2
Программное управление процессом вырезки деталей
на установке «Спектр»
Цель работы: ознакомление студентов с устройством и работой лазерной
технологической установки «Спектр», приобретение навыков по кодированию деталей для
данной установки.
Исходные данные: чертеж детали скопировать из прил. 3. Номер детали выдается
преподавателем. Графическое построение детали выполняется на листах формата А3.
2.1. Общие сведения
Лазерная технологическая установка «Спектр» с программным управлением
предназначена для контурной вырезки деталей любых профилей из листовой стали марок
Ст3, 65Г, 08Х22Н10Т, паранита и других материалов, кроме цветных металлов и их сплавов;
поверхностной термообработки валов, шестерен, пуансонов, матриц вырубных, гибочных,
чеканочных и обрезных штампов, изготовленных из углеродистых, инструментальных
легированных сталей марки Х12М, легированных конструкционных сталей марки 40Х, а
также для образований отверстий (рис. 2.1).
Толщина разрезаемого материала 1–3 мм. Габариты вырезаемых деталей, мм:
5–10х5–100; 100–200х200–400; 200–300х300–500.
Максимальные размеры листов (заготовок), подаваемых для раскроя деталей,
600х600 мм. Ширина реза 0,1–0,5 мм. Зона термического влияния 0,05–0,15 мм.
1
4
2
5
3
Рис. 2.1. Схема установки «Спектр»:
1 – установка координатная; 2 – пульт
4 – выносной пульт управления; 5 – электрошкаф
выносной;
3
–
пульт
управления
излучателем;
Установка лазерная технологическая «Спектр» предназначена для поверхностной
термообработки деталей, технологической оснастки и отдельных видов металлорежущего
инструмента, контурной вырезки единичных и мелких серий деталей и сверления отверстий.
При толщинах более 1 мм ширина реза не задается.
На установке «Спектр» можно резать любые стали, пластики, пластмассы. Всё
зависит от защитного газа.
28
Главный недостаток – торможение при смене кадра программы, следствием чего
является малая результирующая скорость и перегрев детали в месте смены кадра.
Установка
рекомендуется
для
применения
в
инструментальном,
механообрабатывающем и сборочном производствах на машиностроительных предприятиях
отрасли.
В основу физической сущности технологических процессов заложены законы
теплового и газодинамического воздействий лазерного излучения высокой плотности
(порядка 106 Вт/см2) на поверхность обрабатываемых изделий.
При лазерной термообработке используется принцип местного превышения
поверхностной температуры над температурой фазовых структурных изменений. Рост
температуры в объеме материала приводит к фазовым перепадам в твердом или жидком
состоянии, вследствие чего меняются поверхностные свойства материалов.
В качестве рабочего тела, используемого в данной установке при термообработке,
применяется сканатор, который позволяет получить высокочастотные колебания лазерного
пучка в направлении, перпендикулярном направлению движения луча. Частота колебаний и
скорость прямолинейного движения выбираются с таким расчетом, чтобы температура
данного участка поверхности колебалась между температурой плавления и температурой
перехода.
Механизм выполнения операций контурной вырезки и сверления отверстия основан
на процессе испарения, плавления материала с последующим удалением расплава из зоны
обработки струей газа. В зависимости от свойств обрабатываемого материала процесс может
осуществляться либо за счет вклада теплоты реакции горения в общий тепловой баланс, либо
за счет теплоты плавления.
Технологическая универсальность луча лазера позволяет выполнить операции
поверхностной термообработки, контурной вырезки и сверления на одной установке с
высокой степенью автоматизации и механизации.
Состав основных частей установки «Спектр» обусловлен технологическими
процессами термоупрочнения, сверления и резки материалов с целью полной их
автоматизации.
Установка служит для перемещения рабочего органа (резака) по двум координатам, а
также для размещения и закрепления обрабатываемых материалов (рис. 2.2).
Пульт выносной служит для включения настроенных перемещений резака и стола, а
также для проверки работы установки на холостом ходу.
Пульт управления излучателя служит для включения и настройки излучателя.
Пульт управления установки служит для набора программ согласно технологическому
процессу обработки и контролю за его выполнением.
Электрошкаф служит для размещения блоков управления двигателей постоянного
тока и другого вспомогательного электрооборудования.
При резке различных материалов применяют разнородные газы:
стали всех марок – кислород;
пластик (текстолит) – аргон;
резина – аргон или воздух;
паранит (материал для прокладок) – воздух.
29
Z
6
5
X
Y
1
4
2
3
7
8
9
Рис. 2.2. Схема оптической системы в режиме резания:
1 – излучатель, 2 – система телескопическая, 3 – система оптическая, 4–7 – переворотные зеркала,
8 – линза фокусирующая, 9 – стекло защитное
На установке «Спектр» можно записать программу с клавиатуры дисплея на
магнитную кассету ЦМД (цилиндрические магнитные домены).
Программа записывается по строкам, вначале идут строки со вспомогательными, а
затем с технологическими командами. Ниже представлены фрагменты программы.
1. G91 G64 GOO F3000
2. М20
3. G01 Y2560
4. G02 Y-20320 R10160
5. Y-20320 R10160
6. G01 Y2560
7. М21
8. G00 Y-7600
9. Y-14160
10. M30,
где F – задание скорости; М – технологическая команда (20 – открыть заслонку, 21 – закрыть
заслонку, 30 – выключить установку); Y – перемещение.
Кадр состоит из слов. Кадры в программе отделяются друг от друга кодом «конец
кадра» (LF).
Слово является составной частью кадра и состоит из адреса и числа. Адрес, в качестве
которого выступает буква алфавита (А–Z), определяет функциональное значение числа. В
табл. 2.1 приведены адреса, используемые в системе, а в табл. 2.2 – диапазоны изменения
адресов.
30
В начале кадра должен находиться номер кадра, определяемый адресом номера и
последующим числовым значением (не более 4 десятичных цифр).
Координатные слова являются командами для задания перемещения инструмента и
состоят из адреса, показывающего ось перемещения инструмента, и числового значения,
определяющего направление и величину перемещения.
Лазерная технологическая установка «Спектр» имеет систему числового
программного управления (СЧПУ) «Электроника МС 2101.02».
Общие показатели:
количество управляемых осей:
1) общие – 4;
2) одновременно – 3;
вид интерполяции:
1) линейная;
2) круговая;
ввод программ – с клавиатуры;
ускоренный ход – до 15 м/мин;
рабочая подача – до 10 м/мин.
Программирование процесса обработки детали в системе ЧПУ «Электроника МС»
осуществляется на языке, описание которого приводится ниже.
Таблица 2.1
Адреса, используемые в СЧПУ
Функция
Подготовительная функция
Адрес
Значение
Задание режима операций (линейная, круговая
обработка и т.д.)
Задание на перемещение по основным
координатным осям (X, Y)
Координаты центра дуги, составляющие
коррекцию инструмента по радиусу
G
X, Y, Z
Координата
I. J. К
Функция подачи
F
Задание скорости подачи
Вспомогательная функция
М
Число повторений
L
–
Число повторений программы постоянного
цикла (ПЦ)
Примечание. Адрес X используется для задания времени паузы.
Программа состоит из кадров. Разделение программы на кадры обусловлено
невозможностью сохранить всю программу во входном буфере системы. Каждое слово кадра
должно соответствовать своему формату (рис. 2.3). Форматом устанавливаются:
общее количество символов в значении адреса;
количество символов до и после точки;
наличие знака;
признак наличия незначащих нулей.
При вводе программы с клавиатуры система обрабатывает числовые значения с
десятичной точкой и без нее.
31
Рис. 2.3. Формат слова
Таблица 2.2
Диапазон изменения значений адресов
Адрес
Диапазон значений адреса
( ввод, мм)
Номер программы
Р
1–9999
Номер кадра
N
0–9999
Подготовительные функции
G
0–99
X. У, Z
R, I, J, К
А, В, С
+ 99999,99
Подача в минуту
F
0,1–15000 мм/мин
Вспомогательные функции
М
0–99
X, Р
0–99999, 999С
Число повторений
L
1–9999
Номер смещения
(коррекции)
D
Н
1–64
Функция
Координатное слово
Пауза
Направления перемещений на дисплее, а также координатную систему заготовки
принимать согласно рис. 2.4. При программировании заготовка остается неподвижной,
рабочий орган совершает перемещения относительно заготовки.
При задании в приращениях положение конечной точки данного кадра определяется
относительно предыдущей точки программы, т.е. в данном режиме программируется
непосредственная величина перемещения.
На рис. 2.5 приведен пример задания
перемещений в приращениях.
Пусть Х100, Y50 – координаты начальной точки. Х200, Y70 – координаты конечной
точки, тогда G91 X 100Y20 – программирование в приращениях. G-коды вместе с
координатными словами, называемыми в дальнейшем операндами, используются для
описания геометрии детали и режимов ее обработки. В общем случае G-коды записываются
раньше операндов и других слов в кадре. Коды первой группы могут использоваться без
операндов в комбинации с G-кодами из других групп для задания режима перемещения. При
этом они должны задаваться в кадре перед G-кодами, имевшими операнду:
N
G00 G91 Х40000
Y20000 F3000 .
32
Если в кадре запрограммировано несколько G-кодов из одной и той же группы, то
исполняться будет последний код.
Пример 1
G01 G02G00 X40000.
В результате выполнения этого кадра будет установлен режим позиционирования G00.
Коды без операндов должны записываться в кадре перед кодами с операндами (табл. 2.3).
Пример 2
G91 G17G01 X20000 У20000.
Y
Y
X
X
Рис. 2.4. Управляемые координаты:
а – направление перемещения на дисплее (толчковые кнопки); б – координатная система заготовки
Y
(мм)
70
50
100
200
X (мм)
Рис. 2.5. Пример задания перемещений в приращениях
G-коды интерполяции составляют первую группу кодов. Любой код этой группы
является модальным, т.е. будучи задан, он остается эффективным до тех пор, пока не будет
заменен другим кодом. Позиционирование обеспечивается кодом G00.
Данный режим используется для позиционирования по осям ускоренных
перемещений. В режиме G00 всегда происходит замедление и выполняется проверка
достижения требуемой точки, а затем осуществляется переход на следующий кадр.
С помощью данной команды можно запрограммировать линейную интерполяцию.
Траектория рабочего органа представляет собой прямую линию, идущую от начальной точки
к конечной. Скорость перемещения определяется величиной скорости рабочей подачи.
Пример 3
G91 G64G01 У10000 F3000.
33
Рабочий орган перемещается по оси У в направлении «+» на величину 25 мм
(10000 импульсов).
С помощью команд G02 и G03 можно запрограммировать дугу окружности
произвольной длины или полную окружность в одной из трех плоскостей:
[G17] {G02, G03} Х-У – {R, I-Y }F – плоскость ХУ;
[G18] {G02, G03} X-Z – {R, I-K }F – плоскость X;
[G19] {G02, G03} У-Z – {R, Y-K }F – плоскость У.
Таблица 2.3
Код
G 00
G 01
G 02
G 03
Группа
01+
G 09
Подготовительные функции
Функции
позиционирование
линейная интерполяция
круговая интерполяция (по часовой стрелке)
круговая интерполяция (против часовой стрелки)
проверка точного останова
G 11
G 12
11+
включение симметричной обработки
отключение симметричной обработки
G 17
G 18
G 19
02+
выбор плоскости ХУ
выбор плоскости X
выбор плоскости У
G 21
06+
ввод, мм
G 28
G 29
00
возврат в базисную точку
возврат из базисной точки
G 61
G 64
13+
режим точного останова
режим резания
G 91
G 92
08+
задание координат в приращениях
задание координат системы заготовки
G 94
05+
скорость подачи, мм / мин
G 98
10
возврат в начальной плоскости
G 99
10+
возврат плоскости отхода
Примечание. Плюсом (+) помечены группы модальных G – функция, G 71 – безусловная
передача управления.
Функции G02 и G03 отличаются друг от друга направлением круговой интерполяции:
G02 – осуществляет интерполяцию по часовой стрелке;
G03 – осуществляет интерполяцию против часовой стрелки.
Адресные слова X, У, Z задают координаты конечной точки, и в соответствии с G91
данное задание производится в приращениях.
Адресные слова I, Y, К задают расстояние от начальной точки цуги до ее центра
независимо от режима G 91. Если программируемые значения координат X, У, Z, I, Y, К
равны нулю, то они могут быть опущены. Адрес R задает радиус дуги и используется в
34
командe вместо адресов I, Y, К. Значения адресов R могут быть положительными и
отрицательными.
Положительные значения используются для задания дуги, длина которой меньше
или равна 1800. Отрицательные значения R – для задания дуги, длина которой больше 1800.
Недопустимо использовать адрес R при задании полной окружности. Примеры задания дуг
окружностей различной длины приведены ниже.
Пример 4
Задание полной окружности с радиусом R = 25 мм, четырьмя дугами: 1–2; 2–3; 3–4;
4–1 (рис. 2.6).
Фрагмент программы
1. G91 G64 F3000
2. G02Х10000 У – 10000 Y1000
3. G02Х – 10000 У – 10000 I10000
4. G02X – 10000 У1000 Y10000
5. G02Х10000 У10000 I10000
Пример 5
Задание полной окружности с радиусом R = 25, двумя дугами 1–2 и 2–1 (рис. 2.7).
Фрагмент программы
1. G91 G64 F3000
2. G02 У – 20000 R10000
3. G02У20000 R10000
Положительное значение R используется для задания дуги, длина которой меньше
или равна 1800. Отрицательные значения R – для задания дуги больше 1800.
Пример 6
Задание дуг окружностей, длина которых меньше или больше 1800 (рис. 2.8).
1. G91 G64F3000
Рис. 2.6. К примеру 4
Рис. 2.7. К примеру 5
Рис. 2.8. К примеру 6
При положительном значении радиуса перемещения выполняются на короткой дуге I
(дуга меньше 180°) от точки Р1 до точки Р2.
2. G02 X24000 У8000 R20000
При отрицательном значении радиуса перемещения выполняются по большой дуге 2
(дуга больше 180°) от точки Р1 до точки Р2.
Пример 7
Задание двух окружностей, длина которых меньше 180° (рис 2.9).
35
Перемещение выполняется от точки I по дуге радиусом R = 60 мм до точки 2 и от
точки 2 по дуге радиусом R = 50 мм до точки 3.
Фрагмент программы
1. G91 G64 F3000
2. G03 X – 2400 У2400 R2400
3. G02 X – 8000 У – 1600 R2000
Пример 8
Записи программы для обработки детали «корпус» (рис. 2.10).
Запись программы (рис. 2.10, а):
Запись программы (рис. 2.10, б):
1. G91 G64 F3000
1. G91 G64 F6000
2. M20
2. M20
3. M26
3. M26
4. G02 I2000
4. G01 Y10000
5. M27
5. G02 Y20000
6. M21
6. M27
7. M30
7. M21
8. M30
Рис. 2.9. К примеру 7
Рис. 2.10. К примеру 8:
а – движение по окружности, б – движение
по прямой и окружности
В табл. 2.4 дан перечень вспомогательных функций (М), используемых для
управления лазерной установкой «Спектр».
Скорость рабочей подачи может быть задана в любом кадре исходной программы с
помощью адресного слова F. Задание скорости рабочей подачи производится в м/мин. Для
задания применяется команда G94. Для выбора скорости рабочей подачи используется
табл. 2.5. Скорости реза для различных толщин стали приведены в табл. 2.6.
36
Пример управляющей программы для установки «Спектр»
Исходные данные: чертеж детали для контрольного примера представлен на рис. 2.11.
1. G91G64F2000
14. G01 Y-4400
2. G01 Y11200
15. G03 Y-3200
3. М20
18. G01 Y2000
4. М26
17. M27
5. G01 Y-2000
18. G01 Х26800 Y-6800
6. G03 Y18400 R9200
19. M26
7. G01 X-18000
20. X-122000
8. G03 Y-18400 R9200
21. Y-45600
9. G01 X18000
22. X63600
10. Y2000
23. X58400 Y-47600
11. М27
24. M27
12. G01X59200
25. M21
13. M26
26. M30
Таблица 2.4
Перечень вспомогательных функций М,
используемых для управления установкой «Спектр»
Код
Функция
М00
Программируемый останов
М01
Останов с подтверждением
М02
Конец программы
М30
Конец программы с переходом в начало программы
М20
Включение заслонки
М21
Выключение заслонки
М22
Включение воздуха
М23
Выключение воздуха
М26
Включение кислорода
М27
Выключение кислорода
155
14
13
73
s3
6
17
4
45
3
3
R2
R8
7
5
А
10
8=9
5
12
5
2
20
41
5
1=6
5
62
255
45
Рис. 2.11. Размеры детали для контрольного примера
37
5
11
15
Таблица 2.5
Скорость рабочей подачи
Задание скорости
F 1000
F 2000
F 3000
F 4000
F 5000
F 6000
F 7000
F 8000
F 9000
F10000
F11000
F12000
F13000
Материал
Сталь
То же
То же
То же
То же
Нержавейка
Скорость рабочей подачи, м/мин
0,4
0,8
1,2
1,6
2,0
2,4
2,8
3,2
3,6
4,0
4,4
4,8
5, 2
Таблица 2.6
Рекомендуемые скорости реза
Толщина, мм
Скорость рабочей подачи,м/мин
1
1,5
2
2,5
3
3
2,4
2
1,6
1,2
0,8–0,9
0,6
Контрольный пример составления управлявшей программы для установки «Спектр».
2.2. Порядок проведения работы
Лабораторная работа выполняется в приведенной ниже последовательности.
1. Вычертить по указанным (в выданном варианте) размерам деталь на листах формата А3.
2. Составить управляющую программу для установки «Спектр».
2.3. Контрольные вопросы
для подготовки к защите лабораторной работы
1. Сущность лазерной резки. Ее достоинства и недостатки.
2. Устройство установки «Спектр».
3. Структура управляющей программы.
4. Структура кадра, слова.
5. Как записывается кадр с линейной интерполяцией?
6. Как записывается кадр с круговой интерполяцией?
7. Как выбирается газ при резке различных материалов?
8. Какие операции обработки можно выполнять на установке «Спектр»?
9. Какие Вы знаете М-функции, используемые для управления лазерной установкой?
10. Как определяется адресное слово F?
11. Как заполняется кадр с холостым ходом?
12. Какие Вы знаете достоинства и недостатки установки «Спектр»? Как они учитываются
при составлении управляющей программы?
38
3. Лабораторная работа № 3
Повышение точности вырезаемых деталей
Цель работы: приобретение студентами навыков составления карт раскроя с
максимальным коэффициентом использования металла и обеспечением максимальной
точности вырезанных деталей.
Исходные данные: чертеж карты раскроя скопировать из прил. 4. Номер карты
раскроя выдается преподавателем. Графические построения, в том числе траектории
движения на карте раскроя, выполняются (с учетом масштаба задания) на листах формата А3
(см. прил. 4).
3.1. Общие сведения
При строительстве судов большое значение имеет обеспечение высокой точности и
минимальной трудоемкости изготовления деталей корпуса.
Для изготовления деталей из листового проката разрабатываются карты раскроя, а для
профильного – ведомости раскроя. В карты раскроя должны быть включены все заданные
листовые детали в количестве, указанном в спецификации.
Детали сортируют по маркам металла и по толщинам, затем контуры деталей каждой
группы вычерчивают в масштабе 1:10 внутри прямоугольника, размеры которого
соответствуют размерам заказного листа. На одном листе стремятся расположить детали
одной секции. Если их не хватает для плотного заполнения листа, то размещают детали
одного блока и в крайнем случае одного строительного района судна. Кроме того, детали
должны иметь одинаковый технологический процесс вырезки, т.е. лист должен разрезаться
полностью или механическим способом, или на машинах для тепловой резки.
Карта раскроя должна содержать контур листа-заготовки и вписанные в него контуры
деталей. Детали на картах обозначаются своими (в соответствии со спецификацией)
номерами, и рядом с номером указывается количество деталей данного номера на одном
листе заготовки.
При разработке карт раскроя следует стремиться получить не только максимальный
коэффициент использования металла, но и обеспечить максимальную точность вырезанных
деталей.
Качество размещения деталей на карте раскроя оценивается коэффициентом
использования металла:
Kи = Mдет / Mл = Fдет / Fл,
где Mл и Mдет – масса заказного листа и масса вырезаемых из него по данной карте деталей; Fл и Fдет –
площади листа и деталей.
Обычно среднее значение по судну в целом составляет для листового металла
0,8–0,85, для профильного – 0,85–0,9.
Для нормального протекания процесса резки между линией контура детали и
кромками листа необходимо оставлять некоторое расстояние. Его минимальная величина
при механической резке составляет половину толщины листа, но не менее 5 мм, при газовой
резке – 5 мм независимо от толщины. Кромки деталей, имеющие припуск, рекомендуется
совмещать с кромками листа. По возможности следует совмещать прямолинейные кромки
смежных деталей, так как при этом сокращается общая длина линии реза на листе. Для
39
деталей, вырезаемых тепловой резкой, совмещенные кромки деталей должны отстоять друг
от друга на ширину реза. При разметке деталей, вырезаемых на механических ножницах,
должна быть обеспечена возможность сквозной резки через весь лист.
Технология и оборудование для тепловой резки не обеспечивают точности,
полностью устраняющей необходимость пригонки при сборке. Погрешности тепловой резки
на машинах с программным управлением вызываются, с одной стороны, неточностью
работы машин, с другой – тепловыми деформациями вырезаемых деталей. Для машин с
фотоэлектронным управлением к ним добавляются погрешности вычерчивания копирчертежа, а при резке по разметке на переносных машинах – погрешности разметки контура
детали. Таким образом, погрешности вырезаемых деталей определяются оборудованием –
конструктивным исполнением, регулировкой машин и систем управления, технологией
резки (режимами, маршрутами вырезки), квалификацией рабочих, деталью – материалом и
состоянием его поставки, формой и размерами детали.
Для уменьшения тепловых деформаций необходимо указывать на картах раскроя или
копир-чертежах последовательность вырезки деталей.
При формировании карт раскроя необходимо, по возможности, размещать на листе
смешанные наборы деталей (длинные и короткие), располагая узкие и длинные детали
(l/h > 4, где l и h соответственно длина и ширина вырезаемой детали) вдоль продольной
кромки листа, короткие – в середине листа и у противоположной кромки, обеспечивая в
возможных случаях совмещение резов и предусматривая в первую очередь вырезку узких и
длинных деталей.
На рис. 3.1 приведены некоторые варианты карт раскроя и последовательности
вырезки деталей. Детали, имеющие одну кромку с вырезами, целесообразно располагать так,
чтобы эта кромка была обращена в сторону кромки листа, от которой начинается вырезка
детали (рис. 3.1, а).
Очередность вырезки детали должна назначаться из следующего условия: сначала
вырезаются детали, расположенные у края по ширине листа, затем следующий ряд деталей и
т.д., т.е. нужно последовательно переходить в направлении к противоположной кромке и
сохранять принцип наибольшей жесткости для вырезаемой детали и исходного листа
(см. рис. 3.1, б).
Начало и направление реза каждой детали необходимо назначать таким образом,
чтобы кромка, соединяющая деталь с основной массой листа, обрезалась в последнюю
очередь (см. рис. 3.1, в).
Вырезку деталей, близких по размерам к габаритам листа, необходимо начинать с
угла у длинной кромки (см. рис. 3.1, г). Если одна из деталей занимает большую часть листа,
вырезку следует начинать с этой детали (см. рис. 3.1, д).
Расстояние между прилегающими кромками детали должно быть равно ширине реза.
На величину остаточных деформаций вырезанной детали влияет ширина исходного
листа. При вырезке незакрепленных деталей увеличение ширины исходного листа приводит
к уменьшению остаточной деформации изгиба вырезанной детали, а при вырезке с
закреплением против изгиба – к увеличению кривизны. Поэтому при вырезке без
закреплений детали повышенной точности следует вырезать в первую очередь, а при вырезке
в закреплении – в последнюю.
40
Рис. 3.1. Карты раскроя листов:
а – с расположением длинной и широкой деталей вдоль продольной кромки, б – с деталями шириной, равной
ширине разрезаемого листа, в – с мелкими деталями, г – с расположением узких длинных деталей вдоль
продольной кромки листа, д – с деталью, занимающей большую часть листа. Цифрами указана
последовательность вырезки деталей;
– начало направления реза,
– резка отходов, /// – перемычка
Расстояние между перемычками зависит от ширины вырезаемой детали. При вырезке
прямоугольных деталей это расстояние ориентировочно может быть принято равным 6–8
ширинам вырезаемой детали, но не более 2500 мм. На каждой детали оставляют не менее
двух перемычек. Длину перемычки можно принять равной толщине вырезаемой детали, но
не менее 10 мм.
41
Места оставления перемычек необходимо назначать в зависимости от формы и
стремясь расположить перемычки для каждой детали одну против другой на одной прямой.
Иногда, особенно при вырезке длинных и узких полос, оставляют перемычки –
участки непрорезанного металла длиной 12–15 мм, которыми детали скрепляются друг с
другом и с неразрезанной еще частью листа. Перемычки разрезают вручную после
остывания листа.
3.2. Порядок проведения работы
Лабораторная работа выполняется в приведенной ниже последовательности.
1. Вычертить по указанным (в выданном варианте) размерам карту раскроя на листах
формата А3.
2. Указать последовательность вырезки деталей.
3. Указать начало направления реза.
4. Указать резку отходов.
5. Показать места расположения перемычек.
6. Указать, какие возможны иные варианты расположения деталей на выданной карте
раскроя.
3.3. Контрольные вопросы
для подготовки к защите лабораторной работы
1. От чего зависит точность вырезаемых деталей?
2. Что представляют собой карты раскроя?
3. Как разрабатываются карты раскроя?
4. Основное правило расположения деталей на карте раскроя.
5. Для чего служат перемычки?
6. Как должны располагаться перемычки на картах раскроя?
7. Правило назначения последовательности вырезки деталей.
8. Какие требования предъявляются к картам раскроя?
42
4. Лабораторная работа № 4
Изготовление детали с помощью программы «Компас-3D»
Цель работы: приобретение студентами навыков построения трехмерной модели
детали с дальнейшим преобразованием ее в традиционный видовой чертеж.
Исходные данные: варианты с эскизами деталей выдаются преподавателем (см. прил. 5).
Графические построения выполняются в программе «Компас-3D» с учетом размеров,
указанных в задании, на листах форматов А4 или А3.
4.1. Общие сведения
Одним из направлений реформирования судостроения является повышение точности
изготовления деталей. Станки с числовым программным управлением, позволяющие
обеспечить высокую точность обработки, требуемую универсальность, быструю
переналаживаемость, решают поставленную задачу.
В лабораторной работе рассматривается 3-D моделирование деталей для системы
ARC1200 (рис. 4.1). Управляющие программы для этого станка составлены с учетом
внедренного на предприятии «Звезда» программного продукта «Компас-3D».
Рис. 4.1. Электроэрозионный проволочно-вырезной станок с ЧПУ мод. ARC1200
Для программирования используется стандартный код ISO. Комплекс оборудован
системой автоматического программирования, позволяющей выполнять CAD/CAM
операции во время обработки; возможно отображение двух- и трехмерных чертежей на
экране.
Большинство предприятий стремится проектировать в трехмерном пространстве.
Трехмерные CAD-системы дают возможность значительно ускорить процесс выпуска
проектной документации, а также позволяют повысить точность проектирования.
CAD-системы (Computer Aided Design– компьютерная поддержка проектирования)
предназначены для решения конструкторских задач и оформления конструкторской
документации. В современные CAD-системы входят модули моделирования трехмерной
43
объемной конструкции (детали) и оформления чертежей и текстовой конструкторской
документации (спецификаций, ведомостей и т.д.).
Для многих предприятий по соотношению цена/качество наиболее оптимальной
является категория средних САПР, куда входят и программы «Компас 3D» и «AutoCad».
Основная задача, решаемая системой «Компас-3D», – моделирование изделий с целью
существенного сокращения периода проектирования и скорейшего их запуска в
производство. Эти цели достигаются благодаря возможностям быстрого получения
конструкторской и технологической документации, необходимой для выпуска изделий
(сборочных чертежей, спецификаций, деталировок), передачи геометрии изделий в
расчетные пакеты и в пакеты разработки управляющих программ для оборудования с ЧПУ,
создания дополнительных изображений изделий (для составления каталогов, выполнения
иллюстраций к технической документации).
«Компас-3D» – система трехмерного твердотельного моделирования, чертежнографический редактор и модуль проектирования спецификаций. Система трехмерного
твердотельного моделирования предназначена для создания трехмерных ассоциативных
моделей отдельных деталей и сборочных единиц, содержащих как оригинальные, так и
стандартизованные конструктивные элементы. Параметрическая технология позволяет
быстро получать модели типовых изделий на основе однажды спроектированного прототипа.
Многочисленные сервисные функции облегчают решение вспомогательных задач
проектирования и обслуживания производства.
AutoCAD – двух- и трехмерная система автоматизированного проектирования,
разработанная компанией Autodesk. Программа включает в себя полный набор инструментов,
обеспечивающих комплексное трёхмерное моделирование, в том числе работу с
произвольными формами, создание и редактирование 3D-моделей тел и поверхностей,
улучшенную 3D-навигацию и эффективные средства выпуска рабочей документации,
реализована поддержка параметрического черчения.
CAM (Computer Aided Manufacturing) – компьютерная поддержка изготовлению.
Системы CAM используются для планирования, управления и контроля операций
производства. Наиболее важным качеством этих системы является способность
автоматизировать расчеты траекторий перемещения инструмента для обработки на станках с
ЧПУ.
Система позволяет эффективно решать все задачи технической подготовки
производства – от внешнего (концептуального) проектирования до выпуска чертежей,
спецификаций, монтажных схем и управляющих программ для станков с ЧПУ.
Технологам – программистам станков с ЧПУ предоставляется инфраструктура для
работы со всеми продуктами по программированию станков с ЧПУ с возможностью
просмотра и анализа технологических схем обработки деталей, созданных средствами
данной системы.
Программное обеспечение состоит из частей CAD и DTNS. CAD используется для
имитации выполнения, редактирования и отслеживания траектории обработки заготовки по
чертежу. DTNS используется для переноса данных из файлов чертежей заготовки в
управляющую программу.
Работой станка можно управлять, используя ручной пульт в системе CAD/DTNS.
44
Скоростной высокоточный проволочно-вырезной станок серии AR использует
технологию мгновенного создания участков высоких температур в области разряда,
создаваемого между электродом и заготовкой, что позволяет удалять материал из заготовки,
выполненной из токопроводящего материала. Станочный комплекс состоит из станка,
генератора, системы управления автоматической подачей, системы перемотки проволоки,
системы фильтрации рабочей жидкости (рис. 4.2).
Рис. 4.2. Электроэрозионный станок с ЧПУ
Система представляет собой высокоточный станочный комплекс серии ARC с ЧПУ
размером 1200х1465х1727 мм, весом 1500 кг, предназначенный для проволочно-вырезной
электроэрозионной обработки. Управление станком осуществляется с помощью
персонального компьютера и высокоскоростных микропроцессоров. Система дает
возможность одновременно управлять четырьмя координатами (X, Y, U, V). С помощью
станка возможно осуществлять конусное резание и разноконтурную обработку торцов
заготовки. Система позволяет производить обмен данными с другими компьютерами и
управляющими системами через серийный интерфейс. Для программирования используется
стандартный код ISO. Комплекс оборудован системой автоматического программирования,
позволяющий выполнять CAD/CAM операции во время обработки; возможно отображение
двух- и трехмерных чертежей на экране. Автоматический режим перемотки проволоки
делает процесс намотки более простым и удобным.
Электроэрозионный станок предназначен для вырезки деталей из электропроводных
материалов. Производится вырезка электродом-проволокой. В качестве охлаждения подается
вода. Основные области применения станка – вырезка деталей из закаленных сталей,
твердых сплавов, деталей, не допускающих силового воздействия режущего инструмента,
других деталей со сложным контуром или содержащих фигурные отверстия.
45
В составе станка присутствует специальный крестовой стол (620х400), который
обеспечивает наклон проволоки по программе, позволяет вырезать детали с наклонной
образующей вырезаемого контура. Максимальная нагрузка на рабочий стол – 300 кг.
В состав станка входит генератор технологического тока, собранный на современной
элементной базе, который генерирует рабочие импульсы задаваемой оператором частоты и
длительности.
Насосная установка станка, размещается в непосредственной близости от него,
обеспечивает постоянную фильтрацию воды, наполнение ванны станка, подачу воды под
давлением в рабочую зону, регулирование давления в верхнем и нижнем соплах.
Фильтрующие элементы – два сменных картонных фильтра большой емкости российского
производства.
В комплекте станка находится универсальный набор крепежных приспособлений для
закрепления всего высотного диапазона обрабатываемых заготовок, алмазные направляющие
проволоки (2 шт.), два установленных в гидросистему новых фильтра (рассчитаны на 1
месяц работы).
Электроэрозионный станок с максимальной толщиной резки металла 200 мм
справляется с выполнением сложных технологических задач:
выполнение углублений и отверстий сложной конфигурации, в том числе глухих
проемов;
обработка титана, инструментальных и легированных сталей, твердых сплавов и
закаленной стали высочайшей твердости;
выполнение выемок различной конфигурации на внутренних поверхностях детали;
создание отверстий с резьбой в заготовках из твердых металлов;
изготовление деталей, которое невозможно или сложно на токарных и фрезерных
станках с программным управлением.
Существует несколько разновидностей электроэрозионной обработки:
комбинированная – производится одновременно с иными типами обработки;
электроэрозионно-абразивная – материал разрушается с помощью электричества и
шлифуется абразивными частицами;
электрохимическая – металл растворяется в электролите под воздействием тока;
анодно-механическая – металл растворяется с появлением пленки окисей (сочетается
с электроэрозионным методом);
объемное копирование – метод обработки, позволяющий получить на болванке
проекцию инструмента;
шлифование – под воздействием электричества происходит шлифовка металла;
прошивание – инструмент врезается в болванку и формирует отверстие;
вырезание – инструмент-электрод совершает движения подачи и постоянно
перематывается, снимает верхние слои заготовки, создавая необходимую форму;
отрезка – разделение болванки на отдельные куски;
доводка.
Металл обрабатывается разрядами тока, появляющимися между заготовкой и
инструментом. В качестве резца используется натянутая проволока (рис. 4.3).
46
С целью снижения износа резца создаются униполярные электроимпульсы: на
болванку подают переменно положительный заряд и отрицательный. Вода уменьшает
температуру инструмента (проволоки) и уносит продукты разрушения (рис. 4.4).
Рис. 4.3. Обработка металла разрядами тока
Рис. 4.4. Подача воды на инструмент
Под воздействием высокочастотных импульсов эрозия проходит равномерно по длине
зазора, постепенно расширяя самое узкое место. Проволоку или деталь продвигают в
необходимом направлении, увеличивая площадь воздействия. Обработать по этому
принципу можно деталь из любого материала, пропускающего электричество.
Станки обладают устройством, которое перемещает и закрепляет инструмент (не
нужно применять силовые нагрузки для его использования), устройством, регулирующим
пространство, которое имеется между электродами и гидросистемой. Гидросистема имеет
гидронасос, ванной с рабочей жидкостью, фильтры.
Координатно-прошивочный станок позволяет инструменту совершать сложные
перемещения, обеспечивает высокую точность обработки детали.
Проволочно-вырезной станок в качестве инструмента имеет латунную проволоку или
вольфрамовую.
Одно из главных преимуществ – компактность этого оборудования. У современных
моделей станков большая мощность, и они не занимают много места. Станки изготавливают,
используя проверенные, современные технологии, что продлевает срок эксплуатации по
сравнению с устаревшими моделями.
Электроэрозионным станком обрабатывают твердые материалы и сложные изделия. В
качестве инструмента берут тонкую проволоку.
Когда обрабатывают твердые сплавы, то стоимость инструмента составляет половину
стоимости изготовления, тогда как при электроэрозионном методе – всего лишь около трех
процентов.
47
Система электроэрозионного станка оборудована различными элементами
безопасности, помогающими обеспечить защиту от:
поражения электротоком;
пожара;
разбрызгивания материала;
столкновений;
электромагнитных помех;
других опасных факторов.
Все двери генераторов закрываются при помощи винтов. Главный выключатель на
генераторе позволяет отключить подачу питания к системе.
Красная кнопка аварийной остановки на панелях управления генератором и катушкой
предназначена для отключения подачи питания.
При нажатии кнопки OFF (выключение) на ручном пульте прекращаются подача
питания и все запрограммированные перемещения.
Повышенная температура внутри генератора является причиной старения и
перегорания некоторых элементов, что может привести к пожару, поэтому необходимо,
чтобы помещение, где установлена система, было оборудовано достаточным количеством
огнетушителей.
Применение правильных параметров потока позволяет создать оптимальные условия
заряда для удаления шлама из межэлектродного зазора, охлаждения рабочей зоны и
обработки.
Защитные крышки двери и пластины. На боковой поверхности стойки
предусмотрены верхняя и нижняя дверцы, защищающие от разбрызгивания жидкости.
Катушка для проволоки, верхний направляющий шкив, верхний и нижний рычаги
оборудованы защитными крышками, предотвращающими разбрызгивание.
Рабочий резервуар для защиты от разбрызгивания снабжён защитными пластинами на
левой, правой и передней сторонах.
Столкновения обычно происходят, когда оператор перемещает координаты вручную.
В системе используются различные зажимные устройства. При установке зажимов следует
учитывать вероятность столкновений при перемещении координат и этого избегать.
Система относится к оборудованию класса А, на которое распространяется действие
стандарта «Пределы и измерения характеристик электромагнитных помех промышленного,
научного и медицинского оборудования, использующего радиочастоты», разработанного для
ПНМ оборудования небытового назначения или используемого предприятиями вне сетей
электроснабжения низкого напряжения общего пользования.
Система, формирующая электрический разряд, может создавать помехи для теле- и
радио- вещания. Несмотря на это меры по экранированию рекомендуется предусматривать
только в особых зонах.
При движении проволоки и действии разряда скорость проволоки составляет 9 метров
в секунду, что является опасным фактором. Следует обращать особое внимание на
соблюдение мер предосторожности во избежание травм.
При перемотке проволоки с барабана на катушку допускается использование как
механического, так и ручного режимов намотки. После перемотки пусковой рычаг
48
необходимо вовремя снять с катушки во избежание его сбрасывания, в результате которого
могут быть травмированы люди. В станке предусмотрена двухуровневая защита от подобных
ситуаций:
отпущенный рычаг автоматически отсоединяется;
при закрытии крышка, обеспечивающая безопасность при движении проволоки и
действии разряда, закрывает отверстие для рычага, и его необходимо будет снять;
при обработке все крышки и защитные ограждения должны находиться на своих
местах;
защитный выключатель должен быть выключен;
после любого вмешательства все защитные приспособления следует поместить на
свои места до возобновления обработки.
Необходимо регулярно контролировать состояние защитных устройств и выполнять
предусмотренные для них процедуры обслуживания.
Выбор места установки очень важен для станков высокого класса точности. От этого
зависит точность обработки заготовки.
По возможности не следует устанавливать систему близко к станкам, от которых
возможна передача вибрации через основание (это приведет к снижению точности и качества
настройки выравнивания).
В помещениях, где установлен станок, должно быть как можно меньше пыли, не
следует устанавливать станок вблизи от оборудования, выполняющего обработку графита.
Графитная пыль – хороший проводник, она может стать причиной короткого замыкания в
электронных элементах.
Нельзя устанавливать станок вблизи от шлифовального и пескоструйного
оборудования, оборудования, вырабатывающего стружку. Частицы пыли из шлифовального
оборудования обладают высокой абразивной способностью и при попадании в станок будут
причиной сверхнормативного износа шариковых винтов, направляющих и столов.
Пример создания модели фиксатора в «Компас-3D»
В качестве примера для выполнения лабораторной работы рассмотрим процесс
изготовления фиксатора.
Для создания 3D модели в среде «Компас-3D» необходимо открыть программу,
кликнуть левой кнопкой мыши на икону «Деталь» (рис. 4.5) – тем самым создается новая
деталь.
Рис. 4.5. Открытие программы и создание детали
49
В дереве построения выделяется нужная плоскость и создается эскиз (рис. 4.6).
Программа переходит в двухмерную плоскость (рис. 4.7), на которой с помощью геометрии
строится фиксатор (вид спереди).
Рис. 4.6. Создание эскиза
Программный продукт содержит множество инструментов для построения детали,
например, с помощью геометрических создаются отрезки, окружности, ломаные линии, дуги,
вспомогательные линии.
Рис. 4.7. Построение фиксатора. Вид спереди
50
Для того чтобы облегчить работу, программный продукт предлагает такую функцию,
как «Зеркальный массив», поэтому для построения симметричной детали достаточно
нарисовать только одну половину (рис. 4.8).
Рис. 4.8. Формирование детали с помощью геометрии
Чтобы закончить построение с помощью геометрии и вернуться к работе с объемом,
необходимо нажать соответствующую кнопку, и эскиз примет вид как на рис. 4.9.
Рис. 4.9. Готовый эскиз
51
Для того чтобы деталь выглядела объемной, необходимо воспользоваться кнопкой
«Выдавить деталь». После вызова команды внизу экрана появляется диалог, в котором
можно установить параметры элемента выдавливания (рис. 4.10). Для завершения команды
следует нажать кнопку «Применить».
Рис. 4.10. Операция выдавливания
Так как эскиз был создан только для половины детали, следует отобразить ее
зеркально относительно плоскости ZY. Для этого выбирается деталь, кнопка «Зеркальный
массив» копирует ее относительно указанной плоскости (рис. 4.11).
Рис. 4.11. Создание зеркального массива
52
В результате получим объемное изображение фиксатора (рис. 4.12).
Рис. 4.12. Объемное изображение фиксатора
По заданию, после того как сформирована объемная деталь, необходимо создать её
чертеж на плоскости с указанием видов. Для этого следует запустить программу и выбрать
режим «Чертеж». Программный продукт выдаст лист с рамкой формата А4 (рис. 4.13).
Рис. 4.13. Рамка А4
Так как построенная деталь не помещается на данном формате, то для дальнейшей
работы чертеж необходимо преобразовать в формат А3. Для этого следует навести курсор
53
мыши на рамку и правой кнопкой кликнуть по ней. Откроется контекстное меню, где
выбирается пункт «Параметры текущего чертежа» (рис. 4.14).
Рис. 4.14. Параметры текущего чертежа
После чего программа выдаст окно, в котором необходимо выбрать формат и
ориентацию рамки (рис. 4.15).
Рис. 4.15. Выбор формата листа
Для того чтобы создать чертеж готовой объемной детали, в командной строке
выбираем пункты «Вставка», «Вид с модели» и «Стандартные» (рис. 4.16).
54
Рис. 4.16. Создание двухмерного чертежа детали
После чего следует выбрать схему видов (рис. 4.17).
Рис. 4.17. Выбор схемы видов
55
Для того чтобы чертеж отобразился с невидимыми линиями, в меню (расположенном
внизу) необходимо включить функцию «Показать невидимые линии» (рис. 4.18).
Рис. 4.18. Невидимые линии
Чертеж фиксатора с видами сбоку и спереди изображен на рис. 4.19.
Рис. 4.19. Вид сбоку и спереди
56
В завершении работы традиционным способом проставляются размеры. Готовый
чертеж фиксатора представлен на рис. 4.20.
Рис. 4.20. Двухмерный чертеж фиксатора
4.2. Порядок проведения работы
Лабораторная работа выполняется в приведенной ниже последовательности.
1. После запуска программы выбирается режим «Деталь».
2. Учитывая симметрию детали, выбирается основная плоскость и привязка к центру
начала координат.
3. С учетом реальных размеров строится основание детали и задается его объем.
4. При помощи традиционных методов, применяемых в «Компас-3D», строится
полная модель детали.
5. Затем следует сохранить построенную деталь, указав в названии файла номер
варианта и фамилию студента.
6. Для создания видового чертежа запустить режим «Чертеж».
7. Оценить размеры детали с учетом расположения видов и выбрать необходимую
ориентацию и формат листа (А3 или А4).
8. Выбрать построенную деталь, указав режим отображения невидимых линий
пунктиром.
9. Расположить эскизы на чертеже, указав следующие виды:
основной вид;
вид сверху;
вид справа;
изометрия.
57
10. Расставить размеры детали.
11. Заполнить штамп на чертеже.
12. Сохранить чертеж, указав в названии файла номер варианта и фамилию студента.
13. Распечатать чертеж для дальнейшего включения в отчет по лабораторной работе.
4.3. Контрольные вопросы
для подготовки к защите лабораторной работы
1. Что такое «Компас-3D»?
2. Что можно создавать с помощью «Компас-3D»?
3. Принципы выбора основной плоскости для детали?
4. Для чего необходим эскиз и как активировать кнопку для его создания?
5. Как сдвинуть и повернуть изображение в режиме эскиза?
6. Как перемещать отрезки, окружности и другую геометрию в эскизе?
7. Как и какие параметры формата можно задать в программе «Компас-3D»?
8. Приведите алгоритм построения трехмерной модели цилиндра?
9. Основные операции для задания объема?
10. Для чего необходима функция «Зеркальный массив»?
11. Особенности сохранения работы в «Компас-3D»?
58
СПИСОК ЛИТЕРАТУРЫ
1.
2.
3.
4.
5.
6.
7.
Галкин В.А. Справочник технолога-судосборщика. Л.: Судостроение, 1985.
Головчечко В.С., Доброленский В.П., Мисюров И.П. Тепловая резка металлов
в судостроении. Л.: Судостроение, 1975.
Кулик Ю.Г., Сумеркин Ю.В. Технология судостроения и судоремонта. М.: Транспорт, 1988.
Никонов С.П., Панкратов В.П. Судовая разметка. Л.: Судостроение. 1982.
Основы механизации и автоматизации судостроительного производства /
Б.В. Бавынин, В.П., Доброленский и др. Л.: Судостроение, 1989.
Основы технологии и судостроения / В.Д. Мацкевич, Э.В. Ганов, В.П. Доброленский
и др. Л.: Судостроение, 1880.
Шемендюк Г.П., Чехранова Л.И. Основы технологии судостроения и сварки: метод.
указания по выполнению лабораторных работ для студентов специальности 1401
дневной формы обучения. Владивосток: ДВГТУ, 1991.
59
ПРИЛОЖЕНИЕ 1
Оформление титульного листа отчета по лабораторным работам
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение
высшего образования
«Дальневосточный федеральный университет»
Инженерная школа
Кафедра кораблестроения и океанотехники
ОТЧЕТ
ПО ЛАБОРАТОРНОЙ РАБОТЕ №1
[НАЗВАНИЕ ТЕМЫ ЛАБОРАТОРНОЙ РАБОТЫ]
по дисциплине «Технология судостроения и судоремонта»
по направлению
26.03.02 «Кораблестроение, океанотехника и
системотехника объектов морской инфраструктуры»,
профиль «Кораблестроение»
Студенты группы [Номер группы]
[Фамилия Имя Отчество]
[Фамилия Имя Отчество]
[Фамилия Имя Отчество]
Проверил:
[Фамилия Имя Отчество]
Оценка ______________
Подпись ______________
Дата ______________
г. Владивосток
2018
60
ПРИЛОЖЕНИЕ 2
Задания для лабораторной работы № 1
Вариант № 1
Вариант № 2
Вариант № 3
Вариант № 4
Вариант № 5
Вариант № 6
61
Вариант № 7
Вариант № 8
Вариант № 9
Вариант № 10
Вариант № 11
Вариант № 12
62
Вариант № 13
Вариант № 14
Вариант № 15
Вариант № 16
Вариант № 17
Вариант № 18
63
Вариант № 19
Вариант № 20
Вариант № 21
Вариант № 22
Вариант № 23
Вариант № 24
64
ПРИЛОЖЕНИЕ 3
Задания для лабораторной работы № 2
Вариант № 1
Вариант № 2
65
Вариант № 3
Вариант № 4
66
Вариант № 5
Вариант № 6
67
Вариант № 7
Вариант № 8
68
Вариант № 9
Вариант № 10
69
Вариант № 11
Вариант № 12
70
Вариант № 13
Вариант № 14
71
Вариант № 15
Вариант № 16
72
Вариант № 17
Вариант № 18
73
Вариант № 19
Вариант № 20
74
ПРИЛОЖЕНИЕ 4
Варианты раскроя листов № 3
Вариант 1. Раскрой листа размером 2,4х10 м
Вариант 2. Раскрой листа размером 2,4х10 м
Вариант 3. Раскрой листа размером 2,4х10 м
Вариант 4. Раскрой листа размером 2,4 х 10 м
75
Вариант 5. Раскрой листа размером 2,4х10 м
Вариант 6. Раскрой листа размером 2,4х10 м
Вариант 7. Раскрой листа размером 2,4х10 м
Вариант 8. Раскрой листа размером 2,4х10 м
76
Вариант 9. Раскрой листа размером 2,4х10 м
Вариант 10. Раскрой листа размером 2,4х10 м
Вариант 11. Раскрой листа размером 2,4х10 м
Вариант 12. Раскрой листа размером 2,4х10 м
77
Вариант 13. Раскрой листа размером 2,4х10 м
Вариант 14. Раскрой листа размером 2,4х10 м
Вариант 15. Раскрой листа размером 2,4х10 м
Вариант 16. Раскрой листа размером 2,4х10 м
78
Вариант 17. Раскрой листа размером 2,4х10 м
Вариант 18. Раскрой листа размером 2,4х10 м
79
ПРИЛОЖЕНИЕ 5
Задания для лабораторной работы № 4
Вариант 1
Вариант 2
Вариант 3
Вариант 4
80
Вариант 5
Вариант 6
Вариант 7
Вариант 8
Вариант 9
Вариант 10
81
Вариант 11
Вариант 12
Вариант 13
Вариант 14
Вариант 15
Вариант 16
82
Вариант 17
Вариант 18
Вариант 19
Вариант 20
Вариант 21
Вариант 22
83