Михайлюк Методические указания к лабораторным работам по курсу "Монтаж, наладка и эксплуатация систем автоматизации".
реклама

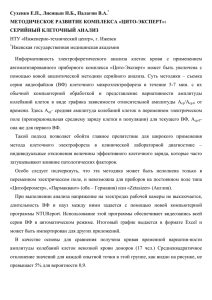
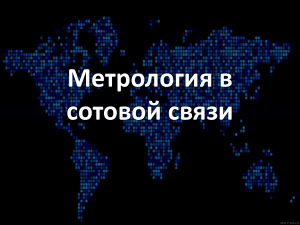
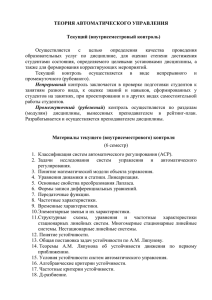
КАФЕДРА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ Г.Д. Михайлюк МОНТАЖ, НАЛАДКА И ЭКСПЛУАТАЦИЯ СИСТЕМ АВТОМАТИЗАЦИИ ________________________________________ Заказ № 212. Формат 60х84 1/16. Бумага офс. Печать RISO. Издательство не несет ответственность за содержание материала, предоставленного автором к печати. Издатель и изготовитель: ГОУ ВПО ЛНР «Донбасский государственный технический университет» пр. Ленина, 16, г. Алчевск, ЛНР, 94204 (ИЗДАТЕЛЬСКО-ПОЛИГРАФИЧЕСКИЙ ЦЕНТР, ауд. 2113, т/факс 2-58-59) Свидетельство о государственной регистрации издателя, изготовителя и распространителя средства массовой информации МИ-CГР ИД 000055 от 05.02.2016. ЛАБОРАТОРНЫЕ РАБОТЫ ________________________________________________ МЕТОДИЧЕСКИЕ УКАЗАНИЯ АЛЧЕВСК — 2018 КАФЕДРА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ МЕТОДИЧЕСКИЕ УКАЗАНИЯ к самостоятельной работе студентов при подготовке и выполнении лабораторных работ по курсу "Монтаж, наладка и эксплуатация систем автоматизации" (для студентов направления подготовки 15.03.04 "Автоматизация технологических процессов и производств" 3, 4 курса дневной и заочной форм обучения) Рекомендовано на заседании кафедры АУТП Протокол № 6 от 29.01.2018 Утверждено на заседании методсовета ГОУ ВПО ЛНР «ДонГТУ» Протокол №4 от 16.02.2018 Алчевск ГОУ ВПО ЛНР «ДонГТУ» 2018 УДК 681.5 Методические указания к самостоятельной работе студентов при подготовке и выполнении лабораторных работ по курсу "Монтаж, наладка и эксплуатация систем автоматизации" (для студ. направл. подготовки 15.03.04 "Автоматизация технологических процессов и производств" 3,4 курса днев. и заоч. форм обучен.) / Сост. : Г. Д. Михайлюк. — Алчевск : ГОУ ВПО ЛНР «ДонГТУ», 2018. — 35 с. Приведены указания по теоретической подготовке и выполнению шести лабораторных работ по наладке микропроцессорных систем на базе малоканального, многофункционального микропроцессорного контроллера Ремиконт Р-130. Составитель Г.Д. Михайлюк, ст. преп. Рецензент Р. Ю. Ткачев, доц. 2 ПРАВИЛА РАБОТЫ В ЛАБОРАТОРИИ 1. К занятиям в лаборатории допускаются студенты, которые прошли инструктаж по технике безопасности и расписались в журнале. 2. Перед выполнением лабораторной работы проводится проверка подготовки к ней: студент должен иметь полностью оформленный отчет о предыдущей работе (если она еще не защищена), отчет о текущей работе, без результатов экспериментов, и получить минимально необходимое количество баллов за ответы на контрольные вопросы. К выполнению очередной работы не допускаются студенты, которые имеют две отработанные, но не защищенные работы. 3. После допуска к лабораторной работе студенты собирают схему исследуемой системы, устанавливают необходимые коэффициенты, проводят наладку работы системы, фиксируют экспериментальные данные. 4. Выполнив работу, студент предъявляет преподавателю полученные результаты и получает отметку в журнале о выполнении. 5. Студент обязан бережно обращаться с оборудованием и аппаратурой. Запрещается делать любые надписи на приборах, стендах и столах. 6. В случае нарушения правил внутреннего распорядка или техники безопасности студент отстраняется от выполнения лабораторной работы. Повторно ее выполнение возможно только после разрешения заведующего кафедрой. ПРАВИЛА БЕЗОПАСНОСТИ ПРИ ВЫПОЛНЕНИИ ЛАБОРАТОРНЫХ РАБОТ При выполнении лабораторных работ необходимо придерживаться следующих правил безопасности: – лабораторные работы проводятся только в присутствии преподавателя, который ведет занятие; – при выполнении работы каждый студент должен находиться на своем рабочем месте; 3 – перед началом сборки схемы следует убедиться в том, что тумблера электропитания контроллера и объекта управления находятся в выключенном положении; – включение электропитания производится только после проверки схемы преподавателем; – запрещается оставлять без присмотра исследовательский стенд во включенном состоянии; – о всех неисправностях и отказах в работе приборов и оборудования студент должен немедленно сообщать преподавателю; – студент несет персональную ответственность за нарушение порядка и правил безопасности в лаборатории. ОБРАБОТКА РЕЗУЛЬТАТОВ. ОФОРМЛЕНИЕ ОТЧЕТА И ЕГО ЗАЩИТА Отчет по лабораторной работе составляется на основании экспериментальных и расчетных данных. В общем случае он должен содержать наименование работы и ее цель, принципиальную электрическую схему исследуемой системы регулирования, таблицы технологического программирования контроллера, таблицы с результатами расчетов и экспериментальными данными, графики расчетных и экспериментальных зависимостей. В конце отчета приводится краткий анализ полученных результатов и выводы. Отчет оформляется на отдельных листах белой бумаги формата А4 (210х297 мм). Схемы вычерчиваются карандашом с соблюдением правил технического черчения. Графики выполняются в прямоугольной системе координат на клетчатой или миллиметровой бумаге размером не меньше 100х100 мм. По осям наносится равномерный масштаб с нулевым значением каждой величины в начале координат. На концах осей указываются условные обозначения отражаемых величин и единицы их измерений. Если в одних координатных осях строят несколько графиков функций одной переменной, следует провести дополнительные оси параллельно оси ординат с указанием соответствующих масштабов. При вычерчивании графиков необходимо помнить, что всякое измерение имеет определенную погрешность, поэтому кривую не обяза4 тельно проводить по всем точкам. Она должна усреднять результаты измерений и правильно отображать характер изменения исследуемой величины. Отчет оформляется в соответствии с общими требованиями и правилами оформления текстовых документов, изложенными в ГОСТ 2.105-95. Допускается оформление отчета машинным способом с использованием ЭВМ. Защита выполненных лабораторных работ проходит в соответствии с графиком защиты, который находит свое отражение в графике самостоятельной работы студентов. К защите студент должен иметь полностью оформленный отчет по лабораторной работе. При защите лабораторной работы студент обязан знать: – цель работы; – порядок ее выполнения; – методику проведения исследований и снятия характеристик; – характер зависимостей, которые снимаются; – теоретический материал по данному разделу курса. При защите студент в письменном виде или устно отвечает на поставленные преподавателем вопросы. Преподаватель выставляет в журнал соответствующее количество баллов. ОБЩИЕ УКАЗАНИЯ При подготовке к лабораторной работе необходимо изучить соответствующий теоретический материал, составить структуру конфигурации исследуемой АСР и программу работы микропроцессорного контроллера, подготовить бланк отчета, который должен содержать все пункты, кроме экспериментальных данных. Инструктаж по технике безопасности проводит преподаватель и фиксирует результаты в журнале регистрации. 5 ЛАБОРАТОРНАЯ РАБОТА 1 ПОДГОТОВКА К РАБОТЕ ПРОМЫШЛЕННОГО КОНТРОЛЛЕРА Цель — изучить последовательность подготовки к работе промышленного контроллера (ПК) Ремиконт Р-130, практически освоить основные приемы его технологического программирования, настройки и контроля. 1.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе и при ее выполнении изучить: – назначение ПК Ремиконт Р-130 [1, с. 8-13]; – основные технические характеристики ПК Р-130 [1, с. 13-18]; – состав и структуру ПК Р-130 и назначение его составных частей [2, с. 21-26]; – средства и органы оперативного контроля и управления ПК Р-130 [1, с. 62-74]; – последовательность подготовки ПК Р-130 к работе [2, с. 41]; – назначение и последовательность технологического программирования ПК Р-130, настройки и контроля параметров алгоблоков [2, с. 42; 1, с. 88-96]; – назначение, правила применения и состав стандартной конфигурации (СК) РЕГА ПК Р-130 [2, с. 47-56]; – способы настройки параметров регулятора, реализованного на ПК Р-130 [2, с. 71-73]; – реализацию автоматизированной настройки в ПК Р-130, назначение и функции алгоритма АНР [2, с. 73-81];. Для выполнения лабораторной работы подготовить: – принципиальную электрическую схему соединения блоков Ремиконт Р-130 (выходной сигнал БК-1 0-5 мА) и модели объекта управления (входной и выходной сигналы 0-10 В) для реализации одноконтурной АСР; 6 – структуру конфигурации одноконтурной АСР, которая реализует автоматизированную настройку регулятора; – таблицы установки приборных параметров, алгоритмов, конфигурации и параметров настройки для реализации АСР. 1.2 Порядок выполнения работы 1. Проверить соответствие внешних соединений блоков Ремиконт Р-130 и модели объекта на лабораторном стенде принципиальной схеме. 2. Выполнить тестирование контроллера. 3. Выполнить технологическое программирование контроллера. 4. Определить установленные в алгоритмах РАН и АНР начальные значения коэффициентов Кп, Ти, Хно, к1, к2, к3 и зафиксировать их в отчете. 5. Проверить работу АСР в режимах автоматического (ЛУ) и ручного (РУ) управления, оценить и зафиксировать в отчете качество регулирования по прямым показателям. 6. Обеспечить работу АСР при автоматизированной настройке в линейной области (выходная величина объекта управления и воздействие регулятора не выходят за диапазон 0-100 %), для чего вывести регулируемый параметр на уровень 50 %. 7. Выполнить автоматизированную настройку регулятора при начальных значениях параметров настройки, фиксируя в отчете значения Yк, Тк, Кп, Ти для каждого шага настройки. 8. Оценить по прямым показателям качество работы АСР при полученных в результате настройки параметрах Кп опт и Ти опт. 9. Сравнить качество регулирования по п. 5 и п. 8 и зафиксировать выводы в отчете. 1.3 Методические указания по выполнению работы Автоматизированную настройку регулятора выполнять в последовательности: 7 – перевести алгоритм РАН в режим "настройка", подав на вход 11 сигнал Снас= 1, и убедиться в наличии автоколебаний в замкнутой АСР (контролировать выходной сигнал алгоритма РАН); – запустить алгоритм АНР, подав на вход 02 сигнал Спс = 1 (наблюдать на выходе 02 номера анализируемых периодов колебаний Nтек); – при достижении Nтек = 3..4, наблюдать состояние выхода 01 (Dкон); – при появлении сигнала Dкон = 1, считать на выходах 03, 04 усредненные значения амплитуды и периода колебаний Yк, Тк и на выходах 06, 07 – новые рассчитанные значения параметров настройки Кп р, Ти р, установить последние в РАН; – проверить состояние выхода 05 (Dопт). Если Dопт = 0, перезапустить алгоритм АНР, подав на вход 02 Спс = 0, а затем Спс = 1, и выполнить новый этап настройки. Если Dопт = 1, завершить настройку, для чего обнулить алгоритм АНР, подав на вход 02 сигнал Спс = 0, и перевести алгоритм РАН в режим "работа", подав на вход 11 сигнал Снас = 0. 1.4 Требования к отчету Отчет должен содержать: – название и цель работы; – принципиальную электрическую схему АСР на базе Ремиконт Р-130; – структуру конфигурации одноконтурной АСР с автоматизированной настройкой регулятора; – функциональные схемы алгоритмов РАН и АНР; – порядок технологического программирования контролера; – таблицы установки приборных параметров, алгоритмов, конфигурации и параметров настройки; – порядок выполнения работы; – последовательность выполнения автоматизированной настройки; 8 – значение параметров Хно, к1, к2, к3, начальные, а также полученные в результате настройки параметры Кп и Ти, значения Yк, Тк, Кп, Ти для каждого шага настройки; – показатели качества работы АСР при начальных и полученных в результате настройки значениях Кп, Ти и выводы по работе. Контрольные вопросы 1. Назначение ПК Ремиконт Р-130. 2. Характеристика входов-выходов контроллера (виды сигналов, разрешающая способность и погрешность АЦП и ЦАП, характеристики нагрузки). 3. Характеристика функциональных параметров контроллера (время цикла, погрешность цифровой обработки информации, объем памяти, количество независимых контуров, виды управлений, заданий, законов регулирования, режимы работы, контролируемые параметры контуров). 4. Состав ПК Ремиконт Р-130 и назначение его составных частей. 5. Назначение лицевой панели контроллера, органы оперативного контроля и управления, реализация команд оперативного управления. 6. Назначение пульта настройки контроллера и его органов контроля и управления. 7. Последовательность подготовки Ремиконт Р-130 к работе. 8. Назначение, состав и последовательность технологического программирования ПК Р-130. 9. Виды СК, их состав, назначение и правила применения. 10. Какие способы настройки регулятора можно реализовать на Ремиконт Р-130, действия оператора при этом. 11. Достоинства метода автоматизированной настройки, задействованного в Ремиконт Р-130. 12. Последовательность выполнения автоматизированной настройки. 9 ЛАБОРАТОРНАЯ РАБОТА 2 ПРОГРАММНАЯ РЕАЛИЗАЦИЯ НА ПК МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ И НАЛАДКА ЕЕ РАБОТЫ Цель — изучить и практически освоить основные приемы наладки реализованной на ПК модели объекта управления. 2.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе изучить: – последовательность подготовки к работе ПК Ремиконт Р-130 [2, с. 41]; – назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков [2, с. 41; 1, с. 82-90]; – назначение, функциональную структуру и работу алгоритмов динамического и статического преобразования информации ФИЛ, ЗАП, ИНТ, МСШ, ПЕР [1, с. 143-151, 163-164]; – виды моделей объектов управления [4, с. 83-87]; – реализацию моделей объектов управления на ПК [3, с. 8-13]. Для выполнения лабораторной работы подготовить: – структуры конфигураций моделей объектов управления с передаточными функциями вида W1( p ) k об e p ( Т 1 р 1)( Т 2 р 1)2 W2 ( p ) k об e , p Т и р ( Т 1 р 1)( Т 2 p 1)2 10 (2.1) , (2.2) предусмотрев возможность подачи на вход модели ступенчатого воздействия; – таблицы технологического программирования и настройки конфигураций, реализующих модели (2.1), (2.2), в соответствии с вариантом по таблице 2.1. Период проталкивания алгоритма ЗАП выбирать из условия Т = 0.01 · 4 · (Тоб сумм. + τ) Параметры Таблица 2.1 – Параметры исследуемых моделей объектов 1 Коб,% 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2,0 Т1, с 10 11 12 13 14 15 16 17 18 19 Т2, с 10 11 12 13 14 15 16 17 18 19 ,с 11 10 9,0 8,0 7,0 6,0 5,0 4,0 3,0 2,0 Ти, с 10 11 12 13 14 15 16 17 18 19 хвх1,% 50 50 50 50 50 50 50 50 50 50 хвх2,% 10 10 10 10 10 10 10 10 10 10 Числовые значения согласно вариантов 2 3 4 5 6 7 8 9 10 2.2 Порядок выполнения работы 1. Выполнить технологическое программирование контроллера для реализации модели объекта с передаточной функцией (2.1). 2. Установить параметры настройки алгоритмов в соответствии с заданным вариантом. 3. Проверить работу модели объекта управления при ступенчатом воздействии по входу. 4. Зафиксировать переходную характеристику модели объекта. 5. Выполнить технологическое программирование для реализации модели объекта с передаточной функцией (2.2) и повторить для нее п.п. 2-4. 11 2.3 Методические указания по выполнению работы При проверке работы модели ее выходной сигнал контролировать с помощью лицевой панели ПК. Переходную характеристику фиксировать как при подаче, так и при снятии входного действия на модель объекта. При работе с моделью объекта с передаточной функцией (2.2) ее обнуление проводить в последовательности: – подать на вход модели объекта воздействие Х= 0 и убедиться в обнулении сигнала на входе алгоритма ИНТ; – установить по входу 04 алгоритма ИНТ сигнал Хнач = 0 и ввести начальные условия, подав на вход 03 сигнал Снач = 1, а потом Снач = 0; – фиксацию переходной характеристики делать с помощью программно реализованного блока регистрации, структура конфигурации которого приведена на рисунке 2.1. Для управления блоком регистрации приконфигурировать ко входу модели объекта а. РУЧ. Блок регистрации работает следующим образом. По заднему фронту сигнала Супр1 (переключение контура АСР из режима РУ в режим ЛУ), а также по переднему или заднему фронту сигнала Супр2 (приложение к входу объекта или снятие с его входа возмущения), соответствующий а. ВЫФ (а.б. 21 - 23) формирует на входе схемы многовходовое ИЛИ а. МИЛ (а.б. 24) короткий импульсный сигнал Супр3. Этот сигнал переключает в нулевое, рабочее, состояние RS триггер (а.б. 25), который формирует сигнал Супр4. По этому сигналу разрешается работа счетчика импульсов управления (а.б. 20, рис. 6.1) и последовательно включенных а. ЗАП (а.б. 26 -28). Последние начинают проталкивать через свои ячейки памяти с периодичностью Т = tпп / 30, установленной на соответствующем входе а.б. 26, сигнал Уоб. Количество проталкиваний фиксируется счетчиком (а.б. 30). По каждому проталкиванию а. ОДВ (а.б. 29) формирует импульс Dотс длительностью 1 с, на время действия которого включается светодиод "ошибка 1" на ПЛ. После того, как информация заполнит все ячейки памяти а.б. 26 28, счетчик (а.б. 30) через а.б. 31 переключит триггер 25 в единичное, исходное, состояние. При этом сигнал Супр4 будет снят, что остановит 12 процесс регистрации сигнала Уоб и прекратит счет импульсов управления в схеме на рисунке 6.1. Считывание информации из блока осуществляется следующим образом. В таблице регистрации переходного процесса, для нулевого момента времени, следует указать начальное для данного переходного процесса значение Уоб. Вторую ординату следует считать по входу Z ПЛ. Потом, после установки на соответствующем входе а.б. 26 необходимой периодичности считывания Тсч (обычно Тсч = 5с), следует перезапустить блок регистрации, переключив контур в режим РУ, а потом – в ЛУ. Затем, при каждом включении светодиода "ошибка 1" ПЛ, необходимо фиксировать величину Уоб, которая выдается по входу Z а. ОКО. 2.4 Требования к отчету Отчет должен содержать: – название и цель работы; – структуры конфигураций для реализации моделей объектов с передаточными функциями (2.1), (2.2); – таблицы технологического программирования и настройки контроллера; – порядок выполнения работы; – графики переходных характеристик исследуемых моделей и выводы по работе. 13 21ВЫФ79 Супр.2 уп 01 01 22ВЫФ79 Супр.3 01 01 23ВЫФ79 Супр.1 01 01 24МИЛ73 -03 25ТРИ76 -01 01 02 02 03 01 30СЧТ82 -01 Супр.4 01 0 28 01 26ЗАП39 -10-00 04 01 Yоб. Тз;Tсч 05 04 05 0.6 01 31ВЫФ79 01 02 01 27ЗАП39 -10-00 02 01 03 01 1 04 29ОДВ83 -00 28ЗАП39 -10-00 02 01 03 01 1 01 01 04 01 1,0 Y р Рисунок 2.1 – Структура конфигурации блока регистрации 14 03 01 Dотс. Контрольные вопросы 1. Последовательность подготовки к работе Ремиконт Р-130. 2. Назначение и последовательность технологического программирования контроллера. 3. Настройка и контроль параметров алгоритмов. 4. Назначение, функциональная структура и работа алгоритмов: ФИЛ, ЗАП, ИНТ, МСШ, ПЕР, ОКО. 5. Порядок выполнения работы. 6. Обнуление модели объекта, которая содержит интегратор. 15 ЛАБОРАТОРНАЯ РАБОТА 3 наладка и ИССЛЕДОВАНИЕ РАБОТЫ РАСПРЕДЕЛЕННОЙ АСР С ИНТЕРФЕЙСНОЙ СВЯЗЬЮ МЕЖДУ КОТРОЛЛЕРАМИ Цель — практически освоить программирование и работу интерфейсного канала контроллера 3.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе изучить: – последовательность подготовки к работе ПК Ремиконт Р-130 [2, с. 41]; – назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков [2, с. 42; 1, с. 88-96]; – назначение, структуру, работу СК РЕГА и алгоритмов, которые входят в ее состав [2, с. 41-56]; – назначение, структуру и основные характеристики интерфейсной сети "Транзит" [3, с. 32-34]; – назначение, функции и работу алгоритмов интерфейсного канала ВИН, ИНВ [3, с. 34-36] . Для выполнения лабораторной работы подготовить: – структуру конфигурации локальной АСР с аналоговым ПИрегулятором и программно реализованной моделью объекта с передаточной функцией вида k об e Wоб ( p ) (Т p об р 1) , (3.1) где Коб, Тоб, τ, заданы преподавателем. Дополнительно обеспечить возможность управления объектом сигналами из другого контроллера, соединенного с программируемым интерфейсной сетью "Транзит", при следующих условиях: 16 а) для программируемого контроллера выбор режима управления объектом (от собственного регулятора или внешними сигналами) и формирование внешних управляющих сигналов, должны производиться контроллером, который имеет системный номер на единицу меньше, чем у программируемого; б) программируемый контроллер должен передавать через сеть "Транзит" на управляющий им контроллер выходной сигнал своего объекта; в) программируемый контроллер должен обеспечивать через сеть "Транзит" выбор режима управления и формирование внешних управляющих сигналов для контроллера, который имеет системный номер на единицу больше, чем у программируемого; г) системный номер программируемого контроллера задается преподавателем; д) таблицы технологического программирования и настройки контроллера. 3.2 Порядок выполнения работы 1. Выполнить технологическое программирование контроллера. 2. Установить параметры настройки алгоритмов в соответствии с заданием. 3. Проверить работу АСР в режимах автоматического (ЛУ) и ручного (РУ) управления и, в случае необходимости, отладить программу работы. 4. Перевести АСР управляемого контроллера в режим внешнего управления через интерфейсную сеть, предупредив об этом соответствующую бригаду, и проверить возможность наблюдать за объектом этого контроллера и управлять его объектом органами оперативного контроля и управления программируемого контроллера. В случае необходимости, отладить программы работы контроллеров. Данный пункт выполнить всем бригадам в очередности роста системных номеров контроллеров, на которых эти бригады работают. 17 3.3 Методические указания по выполнению работы 1. Предупредить бригаду, которая работает на контроллере с большим системным номером (подчиненный) о переключении его в режим внешнего управления объектом, после чего переключить свой контроллер на работу с контуром, обслуживающим подчиненный контроллер. 2. Используя органы оперативного контроля и управления своего контроллера изменять выходную координату объекта подчиненного контроллера. Убедиться в возможности наблюдать за объектом этого контроллера и управлять его объектом органами оперативного контроля и управления программируемого контролера. Предъявить полученные результаты преподавателю. 3.4 Требования к отчету Отчет должен содержать: – название и цель работы; – структуру конфигурации распределенной системы управления; – таблицы технологического программирования и настройки контроллера; – порядок выполнения работы. Контрольные вопросы 1. Последовательность подготовки к работе ПК Ремиконт Р-130. 2. Назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков. 3. Назначение, структура, работа СК РЕГА и алгоритмов, которые входят в ее состав. 4. Назначение, структура и основные характеристики интерфейсной сети "Транзит". 5. Назначение, функции и работа алгоритмов интерфейсного канала ВИН, ИНВ. 6 Порядок выполнения работы. 18 ЛАБОРАТОРНАЯ РАБОТА 4 НАЛАДКА И ИССЛЕДОВАНИЕ РАБОТЫ АСР С ПРОГНОЗИРУЮЩИМ РЕГУЛЯТОРОМ Цель — практически освоить методику наладки и оценки качества работы АСР с прогнозирующим регулятором 4.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе изучить: –- последовательность подготовки к работе ПК Ремиконт Р-130 [2, с. 41]; – назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков [2, с. 42; 1, с. 88-96]; – назначение, структуру, функции, работу СК РЕГА и алгоритмов, которые входят в ее состав [2, с. 47-56]; – назначение, функциональную структуру и работу алгоритмов ФИЛ, ЗАП, МСШ, ПЕР, СУМ [1, с. 153-170]; – принципы построения АСР объектов с чистым запаздыванием [3, с. 53-68]. Для выполнения лабораторной работы подготовить: – структуру конфигурации локальной АСР с аналоговым прогнозирующим регулятором Смита и программно реализованной моделью объекта с передаточной функцией вида k об e Wоб ( p ) (Т p об р 1) , (4.1) где Коб, τ, Тоб — заданы преподавателем; При составлении структуры конфигурации предусмотреть: а) возможность введения возмущения на вход модели объекта; 19 б) минимально-возможное время отсчета Т звена чистого запаздывания (при последовательном соединении алгоритмов ЗАП время отсчета Т должно быть больше времени рабочего цикла Т0); в) возможность управления объектом как обычным ПИрегулятором, так и прогнозирующим регулятором Смита; г) обычный ПИ-регулятор следует настраивать на объект с передаточной функцией (4.1), а регулятор Смита – на тот же объект, но без составляющей с чистым запаздыванием. – таблицы технологического программирования и настройки контроллера с учетом следующего: а) в режиме "программирование" устанавливать параметры настройки: Коб (МСШ); Тоб (ФИЛ); Т, Среж, Сотс (ЗАП); б) необходимо перевести в состояние коэффициентов свободные входы алгоритмов для установки следующих параметров: Тф, х∆, Кп, Ти (РАН); С1 (ПЕР). Настройку параметров по этим входам нужно корректировать в режиме "работа". 4.2 Порядок выполнения работы 1. Выполнить технологическое программирование контроллера. 2. Установить параметры настройки алгоритмов в соответствии с заданием. 3 Подключить к объекту управления обычный ПИ-регулятор, проверить работу АСР в режимах автоматического (ЛУ) и ручного (РУ) управления и, в случае необходимости, отладить работу программы. 4 Зафиксировать переходные процессы в АСР по заданию и возмущению. 5 Подключить к объекту управления прогнозирующий регулятор Смита, проверить работу АСР и, в случае необходимости, отладить программу. 6 Зафиксировать переходные процессы в АСР по заданию и возмущению. 7 Сравнить качество работы АСР с обычным регулятором и прогнозирующим регулятором Смита. 20 4.3 Методические указания по выполнению работы 1. Сигналы в исследуемой модели АСР контролировать с помощью лицевой панели и пульта настройки ПК Ремиконт Р-130. 2. Если уровень шумов в исследуемой модели мешает нормальной работе АСР, следует ввести фильтрацию сигнала на входе в регулятор (Тф), а если этого будет недостаточно, ввести зону нечувствительности (х∆). Величины Тф и х∆ должны быть минимально необходимыми. 3. Переходные процессы по заданию и возмущению следует фиксировать раздельно. Изменение задания или нанесение возмущения следует делать скачкообразно и лишь после полной стабилизации параметра, который регулируется. 4. Для скачкообразного изменения задания контур ПК переводится в режим РУ, устанавливается необходимая величина задания, после чего контур переводится в режим ЛУ. Задание регулятору следует изменять в диапазоне 40-60 %, что обеспечит работу АСР в линейной области и позволит сопоставлять переходные процессы, полученные в обе стороны. 4.4 Требования к отчету Отчет должен содержать: – название и цель работы; – структуру конфигурации АСР; – таблицы технологического программирования и настройки контроллера; – порядок выполнения работы; – переходные процессы по заданию и возмущению в исследуемых АСР; – сравнительный анализ качества работы АСР с обычным регулятором и регулятором Смита. 21 Контрольные вопросы 1. Последовательность подготовки к работе ПК Ремиконт Р-130. 2. Назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков. 3. Назначение, функции и работа СК РЕГА и алгоритмов, которые входят в ее состав. 4. Назначение, функции и работа алгоритмов ФИЛ, ЗАП, МСШ, ПЕР, СУМ и их использование для реализации модели АСР. 5. Порядок выполнения работы. 6. Оценка качества работы АСР по прямым показателям. 7. Основные принципы построения АСР для объектов с чистым запаздыванием. 8. Область применения прогнозирующих регуляторов. 9. Структура прогнозирующего регулятора Смита и реализация в ней компенсации чистого запаздывания. 22 ЛАБОРАТОРНАЯ РАБОТА 5 НАЛАДКА И ИССЛЕДОВАНИЕ РАБОТЫ АСР С АНАЛОГОВЫМ РЕГУЛЯТОРОМ И ПРОГРАММНО РЕАЛИЗОВАННОЙ МОДЕЛЬЮ ОБЪЕКТА Цель — практически освоить процедуру наладки и оценки качества работы АСР, реализованной на ПК. 5.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе изучить: – последовательность подготовки к работе ПК Ремиконт Р-130 [2, с. 41]; – назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков [2, с. 41; 1, с. 82-90]; – назначение, структуру, функции, работу СК РЕГА и алгоритмов, которые входят в ее состав [2, с. 47-56]; – назначение и последовательность автоматизированной настройки в Ремиконт Р-130 [2, с. 71-81]; – программную реализацию модели АСР с аналоговым регулятором на ПК [3, с. 22-26]. Для выполнения лабораторной работы подготовить: – структуру конфигурации локальной АСР с аналоговым ПИрегулятором и программно реализованной моделью объекта с передаточной функцией вида Wоб ( p ) k об e p ( Т1 р 1)( Т 2 р 1)2 где Коб, τ, Т1 и Т2 — заданы преподавателем. При составлении структуры конфигурации предусмотреть: а) возможность автоматизированной настройки регулятора; 23 (5.1) б) возможность ввода возмущения на вход модели объекта управления; в) возможность вывода выходного сигнала модели объекта на программно реализованный регистратор (п. 2.3 лаб. раб. 2); г) минимально-возможное время отсчета Т звена чистого запаздывания (при последовательном соединении алгоритмов ЗАП время отсчета Т должно быть больше времени рабочего цикла Т0). Таблицы технологического программирования и настройки контроллера с учетом следующего: а) необходимо перевести в состояние коэффициентов свободные входы алгоритмов для установки следующих параметров: Тф, Х, Кп, Ти, Снас, Хно (РАН); Спс (АНР); С1 (ПЕР); Ссбр (ЗАП). Настройку параметров по этим входам нужно корректировать в режиме "работа"; б) в режиме "программирование" устанавливать параметры настройки по входам: к1 (РАН); к2, к3 (АНР); Коб (МСШ); Т1, Т2 (ФИЛ), Т, Среж, Сотс (ЗАП); в) при автоматизированной настройке регулятора обеспечить показатель колебательности М = 1.6, для чего значения коэффициентов к1, к2, к3 определить по соответствующим номограммам к алгоритму АНР [1, с. 146-149]; г) рассчитать параметры настройки регулятора Кп, Ти, используя рекомендации [4, с. 135-162]. Структура конфигурации АСР приведена на рисунке 5.1. Модель работает следующим образом. Режим работы АСР выбирают с помощью а. РУЧ (а.б. 08), который управляется соответствующими клавишами ПЛ. Для проверки работы контура в режиме ручного управления (РУ) необходимо, с помощью соответствующих клавиш ПЛ, по показаниям нижнего цифрового индикатора (ЦИ), установить необходимое воздействие на выходе контура и проверить отработку этого воздействия объектом по изменению величины Уоб, которую также контролируют по нижнему ЦИ ПЛ. Проверку работы контура в режиме автоматического (локального) управления (ЛУ) выполняют следующим образом. Для скачкообразного изменения задания необходимое его значение следует установить в ре24 жиме РУ, а затем перевести контур в режим ЛУ. Задание устанавливают с помощью а. ЗДН (а.б. 06), который управляется клавишами ПЛ, по показаниям соответствующего ЦИ ПЛ. Затем переводят контур в режим ЛУ и наблюдают за работой регулятора по шкальному индикатору ПЛ, оценивая результат по величине рассогласования (или выходной величине объекта Уоб), которые контролируют по нижнему ЦИ ПЛ. Для демпфирования переходного процесса можно установить в а. РАН (а.б. 07) необходимую величину постоянной времени фильтра сигнала обратной связи Тф. Для уменьшения чувствительности регулятора к случайным помехам и шуму можно ввести в а.б. 07 зону нечувствительности Х . При этом следует помнить, что введение Тф увеличивает инерционность контура регулирования, а введение Х приведет к появлению статической ошибки. При неудовлетворительном качестве регулирования следует выполнить процедуру автонастройки, задействовав а. АНР (а.б. 17). При выполнении автонастройки на объект регулирования не должно действовать возмущение fв. По завершению автонастройки, следует снова оценить качество регулирования, установив в а.б. 07 оптимальные значения Кп и Ти. Для получения переходных процессов в АСР по возмущению, следует, при работе контура в режиме ЛУ, с помощью пульта оператора ПН, подать единичный сигнал на вход а. ИЛИ (а.б. 09). При этом возмущение fв через переключатель (а.б. 10) и сумматор (а.б. 11) поступает на вход модели объекта. При получении переходных процессов по заданию действие возмущения следует устранить, подав на вход а.б. 09 нулевой сигнал. Для фиксации переходных процессов в модели АСР в цифровой форме, нужно использовать программно реализованный блок регистрации, структура и работа которого были рассмотрены в лаб. работе 2. Блок регистрации запускается автоматически по началу переходного процесса по заданию сигналом Супр1 из а.б. 08, а по возмущению – сигналом Супр2 из а.б. 09. 25 С упр. 2 07АНР30 -00 Спс K3 K2 04 03 02 01 1;0 09ИЛИ72 -01 10ПЕР57 -01 01 02 01 01 0 FB С упр.1 1 06РАН20 -00 05ЗДН24 -00 - 00 01 01 Tф 04 Х 05 Кп Ти 06 07 Кд 08 Хмкс 09 10 Хмин 02 01 08РУЧ26 02 02 12ДИН36 - 00 11СУМ42 -01 01 01 01 Коб 02 Т1 03 0 04 0 01 02 14ФИЛ35 -00 13ФИЛ35 - -00 01 01 Т2 02 01 01 Т2 02 16АВА11 -00 15ЗАП39 - m - 00 01 01 Т 01 Yоб. 05 01 Хсм 02 Км 03 01ОКО01 -00 01 02 05 02 06 Yр Dотс. 07 08 10 Рисунок 5.1 – Структура конфигурации АСР с аналоговым регулятором 26 Ан.вых гр.А 01 5.2 Порядок выполнения работы 1. Выполнить технологическое программирование контроллера. 2. Установить параметры настройки алгоритмов в соответствии с заданием. 3. Проверить работу АСР в режимах автоматического (ЛУ) и ручного (РУ) управления и, в случае необходимости, отладить программу работы. 4. Зафиксировать с помощью программно реализованного блока регистрации переходные процессы в АСР по заданию и возмущению. 5. Выполнить автоматизированную настройку параметров регулятора. 6. Повторить п.4 при оптимальных параметрах настройки регулятора. 7. Оценить качество работы АСР. 5.3 Методические указания по выполнению работы 1. Сигналы в исследуемой модели АСР контролировать с помощью лицевой панели и пульта настройки ПК Ремиконт Р-130. 2. Если уровень шумов в исследуемой модели мешает нормальной работе АСР, следует ввести фильтрацию сигнала на входе в регулятор (Тф), а если этого будет недостаточно, ввести зону нечувствительности (х∆). Величины Тф и х∆ должны быть минимально необходимыми. 3. Переходные процессы по заданию и возмущению следует фиксировать раздельно. Изменение задания или нанесение возмущения следует делать скачкообразно и лишь после полной стабилизации параметра, который регулируется. 4. Для скачкообразного изменения задания контур ПК переводится в режим РУ, устанавливается необходимая величина задания, после чего контур переводится в режим ЛУ. Задание регулятору следует изменять в диапазоне 40 – 60 %, что обеспечит работу АСР в линейной области и позволит сопоставлять переходные процессы, полученные в обе стороны. 27 5.4 Требования к отчету Отчет должен содержать: – название и цель работы; – структуру конфигурации АСР; – таблицы технологического программирования и настройки контроллера; – порядок выполнения работы; – графики переходных процессов по заданию и возмущению в исследуемой АСР; – анализ качества работы АСР. Контрольные вопросы 1. Последовательность подготовки к работе ПК Ремиконт Р-130. 2. Назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков. 3. Назначение и последовательность автоматизированной настройки регулятора, реализованного на ПК. 4 Назначение, функции и работа алгоритмов ФИЛ, ЗАП, МСШ, ПЕР и их использование для программной реализации модели АСР. 5. Назначение, функции и работа СК РЕГА и алгоритмов, которые входят в ее состав. 6. Порядок выполнения работы. 7. Оценка качества работы АСР по прямым показателям. 28 ЛАБОРАТОРНАЯ РАБОТА 6 наладка и ИССЛЕДОВАНИЕ РАБОТЫ АСР С ИМПУЛЬСНЫМ РЕГУЛЯТОРОМ И ПРОГРАММНО РЕАЛИЗОВАННОЙ МОДЕЛЬЮ ОБЪЕКТА Цель — практически освоить методику наладки и оценки качества работы АСР с импульсным регулятором 6.1 Методические указания по теоретической подготовке При подготовке к лабораторной работе изучить: – последовательность подготовки к работе ПК Ремиконт Р-130 [2, с. 41]; – назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков [2, с. 41; 1, с. 82-90]; – назначение, структуру, функции, работу СК РЕГИ и алгоритмов, которые входят в ее состав [2, с. 47-56]; – назначение и последовательность автоматизированной настройки в Ремиконт Р-130 [2, с. 71-81]; – назначение, функции и работу алгоритмов ИМП, МСШ, ОГР, СУМ, ИНТ, ФИЛ, ЗАП, ПЕР и возможности программной реализации модели сервопривода и объектов управления на ПК [1, с. 149-157, с. 169; 3, с. 13-22]. Для выполнения лабораторной работы подготовить: – структуру конфигурации локальной АСР с импульсным ПИрегулятором и программно реализованными моделями сервопривода (без учета характеристики устройства связи с объектом и влияния люфта в соединении исполнительного механизма и регулирующего органа) и объекта з передаточной функцией вида Wоб (p) k об e p (Т1 р 1) (Т 2 р 1) 2 29 (6.1) где Коб, τ, Т1, Т2 — заданы преподавателем. При составлении структуры конфигурации предусмотреть: а) возможность автоматизированной настройки регулятора; б) возможность ввода возмущения на вход объекта; в) возможность вывода выходной координаты объекта на программно реализованный регистратор (п. 2.3 лаб. раб. 2); г) минимально-возможное время отсчета Т звена чистого запаздывания; д) возможность автоматического подсчета включений регулятора за время отработки переходного процесса или на заданном временном интервале. Таблицы технологического программирования и настройки контроллера с учетом следующего: а) необходимо перевести в состояние коэффициентов свободные входы алгоритмов для установки параметров: Тф, х∆, Кп, Ти, Тм, Снас, Хно (РИМ); Тпер (ИМП); Тим (ИНТ); х1, С1 (ПЕР); Спс (АНР); Ссбр (ЗАП). Настройку параметров по этим входам нужно корректировать в режиме "работа"; б) в режиме "программирование" устанавливать параметры настройки по входам: к1 (РИМ); Км (МСШ); Хмин (ОГР); Тоб (ФИЛ); Т, Среж, Сотс (ЗАП); к2, к3 (АНР); в) при автоматизированной настройке регулятора обеспечить М = 1.6, для чего значение коэффициентов к1, к2, к3 определить по соответствующим номограммам к алгоритму АНР [1, с. 146-149]; г) рассчитать параметры настройки регулятора Кп, Ти и выбрать постоянную времени исполнительного механизма Тим. Структура конфигурации локальной АСР с импульсным регулятором и моделью исполнительного механизма (ИМ), которая не учитывает характеристики устройства связи с объектом (УСО) и влияние люфта в соединении ИМ и регулирующего органа (РО), приведена на рисунке 6.1. Работа модели в основном аналогична рассмотренной в лабораторной работе № 5 работе модели АСР с аналоговым регулятором, однако она имеет свои особенности. На качество регулирования имеют 30 существенное влияние специфические параметры импульсного регулятора – длительность управляющих импульсов tимп и постоянная времени ИМ Тим. Поэтому в а. РИМ (а.б. 07), кроме Кп и Ти следует также устанавливать величину Тм = Тим, в а. ИМП (а.б. 09) – период прохождения управляющих импульсов Т, а в а. ИНТ (а.б. 15) – постоянную времени Тим. Исследование работы АСР с импульсным регулятором целесообразно проводить после предыдущего моделирования ее аналогового прототипа, в котором значительно проще определить оптимальные значения Кп и Ти регулятора. Кроме того, определенные в аналоговой АСР показатели качества работы будут служить ориентиром для новых исследований. Оптимизацию настроек импульсного регулятора целесообразно начать с выбора оптимальной величины периода управляющих импульсов Т, сохраняя при этом постоянной величину Тим, выбранную в соответствии с динамическими свойствами объекта регулирования. В качестве начальной, можно принять величину периода Т = 0,1 ∙ tпп где tпп — длительность переходного процесса в аналоговой системе. Затем необходимо экспериментальным путем определить оптимальное значение величины Т, изменяя ее от начального значения в большую и меньшую сторону и анализируя прямые показатели качества регулирования, а также количество включений ИМ за время переходного процесса по показаниям счетчика (а.б. 20), управляемого сигналами из блока регистрации. После определения оптимальной величины Т следует экспериментально определить оптимальное значение величины Тим, действуя аналогично вышеизложенному. 31 С упр .2 18ПЕР57 - 01 17ИЛИ72 - 02 1;0 01 01 02 Fв 07РИМ21 -00 06ЗДН24 -00 -00 01 01 Tф 05 Кп 06 07 08 09 02 Кд Тм 01 С упр .1 09ИМП61-00 08РУЧ26 02 10ОГР48 01 02 T 04 Х Ти 01 01 01 02 01 02 02 01 0 03 01 11ОГР48 01 02 0 01ОКО01 -00 01 Yр Dотс. 02 05 06 07 08 10 12ПЕР57 -01 01 01 01 Тим 13ПЕР57 -01 01 02 01 100 03 0 04 01 19СУМ42 -01 02 01 01 р 02 01 20СЧТ82 -00 01 02 0 Ссб С уп р. 3 С уп р. 4 02 01 17ИЛИ72 -02 04 01 -01 01 02 03 03 01 16НОР60 15ИНТ33 - 00 14СУМ42 Сст Модель объекта (рисунок 2.1) 05 Y 04 03 Рисунок 6.1 – Структура конфигурации АСР с импульсным регулятором Yоб 6.2 Порядок выполнения работы 1. Выполнить технологическое программирование контроллера. 2. Установить параметры настройки алгоритмов в соответствии с заданием. 3. Проверить работу АСР в режимах автоматического (ЛУ) и ручного (РУ) управления и, в случае необходимости, отладить программу работы. 4. Выбрать оптимальные по обеспечиваемому качеству регулирования и количеству включений регулятора значения параметров Тим, Тпер, х∆. 5. Выполнить автоматизированную настройку параметров регулятора. 6. Зафиксировать с помощью программно реализованного блока регистрации переходные процессы в АСР по заданию и возмущению при оптимальных параметрах настройки регулятора, а также при значениях Тим, Тпер, отличающихся от оптимальных на 20 % в обе стороны. 7. Сравнить качество регулирования в АСР с импульсным и аналоговым регуляторами и сделать выводы о влиянии на него специфических параметров импульсного регулятора (Тим, Тпер). 6.3 Методические указания по выполнению работы 1. Сигналы в исследуемой модели АСР контролировать с помощью лицевой панели и пульта настройки ПК Ремиконт Р-130. 2. Если уровень шумов в исследуемой модели мешает нормальной работе АСР, следует ввести фильтрацию сигнала на входе в регулятор (Тф), а если этого будет недостаточно, ввести зону нечувствительности (х∆). Величины Тф и х∆ должны быть минимально необходимыми. 3. Переходные процессы по заданию и возмущению следует фиксировать раздельно. Изменение задания или нанесение возмущения следует делать скачкообразно и лишь после полной стабилизации параметра, который регулируется. 4. Для скачкообразного изменения задания контур ПК переводится в режим РУ, устанавливается необходимая величина задания, после чего контур переводится в режим ЛУ. Задание регулятору следует изменять в диапазоне 40 - 60 %, что обеспечит работу АСР в линейной области и позволит сопоставлять переходные процессы, полученные в обе стороны. 6.4 Требования к отчету Отчет должен содержать: – название и цель работы; – структуру конфигурации АСР; – таблицы технологического программирования и настройки контроллера; – порядок выполнения работы; – графики переходных процессов по заданию и возмущению в исследуемой АСР; – сравнительную таблицу для оценки влияния специфических параметров импульсного регулятора на качество регулирования; – анализ качества работы АСР и выводы. Контрольные вопросы 1. Последовательность подготовки к работе ПК Ремиконт Р-130. 2. Назначение и последовательность технологического программирования контроллера, настройки и контроля параметров алгоблоков. 3. Назначение и последовательность автоматизированной настройки регулятора, реализованного на ПК. 4. Назначение, функции и работу алгоритмов ИМП, МСШ, ОГР, СУМ, ИНТ, ФИЛ, ЗАП, ПЕР и их использование для программной реализации модели сервопривода и объекта управления. 5. Назначение, функции и работа СК РЕГИ и алгоритмов, которые входят в ее состав. 6. Назначение органов управления и настройки регулятора с импульсным выходным сигналом. 7. Порядок выполнения работы. 34 8. Принцип действия и правила использования программно реализованного блока регистрации переходных процессов. 9. Оценка качества работы АСР с импульсным регулятором. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. Михайлюк Г.Д. Регулирующий микропроцессорный контроллер Ремиконт Р-130 : Справ. пособ. — Алчевск .: ДонГТУ, 2017. — 194 с. 2. Конспект лекций по курсу "Промышленные контроллеры" (для студ. спец. "Автоматизация технологических процессов и производств" 3,4 курса днев. и заочн. форм обучения) / Сост. : Г. Д. Михайлюк. — Алчевск, ДонГТУ, 2017. — 200 с. 3. Конспект лекций по курсу " Промышленные контроллеры. Специальные вопросы" (для студ. спец. "Автоматизация технологических процессов и производств" 3,4 курса днев. и заочн. форм обучения) / Сост. : Г. Д. Михайлюк. — Алчевск, ДонГТУ, 2017. — 88 с. 4. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами : Учеб. для вузов. — М. : Энергоатомиздат, 1985. — 296 с. 35