ÉáßτÑΓ ßΓáΓ¿τÑ߬¿ «»αÑñѽ¿¼δσ ¿ ¡Ñ«»αÑñѽ¿¼δσ ß¿ßΓѼ ¼áΓα¿τ¡δ¼ ß»«ß«í«¼ ó ßαÑñÑ
реклама

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ»
«Институт Транспорта»
Кафедра «Теоретическая и прикладная
механика»
КУРСОВАЯ РАБОТА
«Расчёт статически определимых и неопределимых систем матричным способом
в среде MATLAB»
вариант №1
Выполнил: студент группы ДПМ-05
Жиряков Н.С.
Проверил:
ТЮМЕНЬ 2008
Пономарёва Т.М.
Оглавление:
1. Введение
1.1 Краткие сведения из теории матриц
1.2 Матричная форма определения перемещения по правилу Верещгина
1.3 Матричная форма расчета статически неопределимых рам методом сил
2. Расчет статически определимой рамы
2.1. Аналитическое решение
2.2. Матричный способ расчета
2.3. Программа в среде Matlab 6.5
2.4. Результаты выполнения программы
3.Расчет статически неопределимой рамы
3.1. Аналитическое решение
3.2. Матричный способ расчета
3.3. Программа в среде Matlab 6.5
3.4. Результаты выполнения программы
4. Литература
1. ВВЕДЕНИЕ
1.1. Краткие сведения из теории матриц.
В связи с широким применением для расчета конструкций современных вычислительных
средств стало возможным использование таких расчетных схем сооружений, которые более точно
отражают действительную работу сооружений, более полно учитывают те или иные особенности
реальной конструкции.
При использовании ЭВМ для расчета сооружений применяется матричная форма записи
всех исходных данных для выбранной расчетной схемы. Расчет сооружения сводится к
выполнению ряда операций матричной алгебры. Рассмотрим основные понятия о матрицах,
применяемых при решении задач в строительной механике.
Матрицей А порядка m*n называется прямоугольная таблица элементов, состоящая из m
строк и n столбцов:
А
а11
а12
... а1n
а 21
а 22
... а 2 n
...
...
...
а m1
аm2
или
...
... а mn
а11
а
А 21
...
а
m1
а12
а 22
...
аm2
... а1n
... а 2 n
.
... ...
... а mn
Сокращенную запись этой матрицы можно привести в виде
А=|| aij || или A=(aij), 1≤i≤m, 1≤j≤n.
Матрицу, состоящую из одной строки (m=1), называют матрицей – строкой и записывают
кратко:[A]=[a1a2...an]=[ai].
Ряд матриц имеет специальные названия и обозначения. Если m=n, то матрица называется
квадратной, а число n (или m) – ее порядком. Матрица, у которой все элементы равны нулю,
называется нулевой. Квадратная матрица, у которой отличны от нуля лишь диагональные
элементы (аij=0 при i≠j), называется диагональной. Она имеет вид
А
а1
0
...
0
0
а2
...
0
...
... ... ...
0
0
.
... а n
Диагональная матрица, ненулевые элементы которой аij=1, называется единичной и
обозначается буквой Е.
Е
1
0 ... 0
0
1 ... 0
... ... ... ...
0
.
0 ... 1
Матрица, у которой строки являются столбцами заданной матрицы, называется
транспонированной по отношению к заданной и обозначается АТ. Так по отношению к заданной
матрице А=|| aij ||, если поменять в ней местами строки и столбцы, транспонированной будет
матрица АТ=|| aij || называется неособенной или невырожденной, если ее определитель Det A не
равен нулю. При Det A=0 матрица называется особенной (вырожденной).
Обратной матрицей А-1 по отношению к данной квадратной матрице А называется матрица,
удовлетворяющая соотношению
АА-1=Е.
Сложение или вычитание возможно только для прямоугольных матриц одного порядка, при
этом сумма матриц порядка m*n дает матрицу того же порядка. Элементы суммарной матрицы
равны сумме соответствующих элементов складывающих матриц, т.е.
А В
а11 в11
...
а1n в1n
...
...
...
.
а m1 в m1 ... а mn в mn
Произведением прямоугольной матрицы А на постоянное число λ называется матрица, все
элементы которой получены из элементов аij умножаем на число λ:
а11 ... а1n
А .... ... ... .
а m1 ... а mn
Две матрицы могут быть перемножаем лишь тогда, когда число столбцов матрицы А(m*р)
равно числу строк матрицы В(р*n). При перемножении получают матрицу С(m*n). Каждый
элемент матрицы произведения равен сумме произведений элементов i-й строки матрицы А на
соответствующие элементы j-го столбца матрицы В, т . е. имеем матрицу С с элементами
сij=ai1b1j+ai2b2j+...aipbpj;
i=1,...,m; j=1,...,n.
Произведение матриц в отличие
переместительному закону, т. е. АВ≠ВА.
от
алгебраических
операций
не
подчиняется
Из общего правила умножения следует: умножение матрицы на матрицу – столбец дает
матрицу – столбец; умножение матрицы – строки на матрицу дает матрицу – строку;
произведение матрицы – строки на матрицу – столбец дает число.
1.2. Матричная форма определения перемещений по правилу Верещагина.
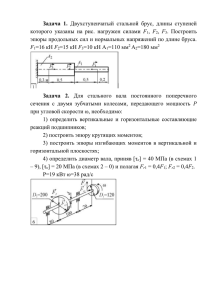
Перемножение эпюр по правилу Верещагина может быть выполнено в матричной форме.
Пусть, например, необходимо произвести на участке n перемножение грузовой эпюры Мк на
эпюру от единичной силы, приложенной в направлении искомого перемещения Мi (рис.1,а). По
формуле
М уМ
ЕI
N уN
EF
Q уQ
GF
,
где ωM, ωN, ωQ – площади эпюр усилий M, N, Q от заданной нагрузки (грузовые эпюры);
у М , у N , у Q - значения ординат на эпюрах от единичных сил под центром тяжести площади
грузовой эпюры.
получим
M уi
M M 0i
1 2 fln M 0i M 1i
1 M 1k l n
M 0i 1i
EI 3
EI n
3
2
EI n 2
n
2( M 1i M 0i ) 2l n
2l
l
2l
M 0i
M 0i n M 1i M 0k n M 0i n M 1i f
3
6 EI n
6 EI n
6 EI n
6 EI n
k
1 M 0k l n
EI n 2
l
2l
n M 0i n M 1i M 1k ,
6 EI n
6 EI n
где ωМк- площадь эпюры Мк, которую разбиваем на три простейшие фигуры; уМi – значение
момента на эпюре Мi под центром тяжести эпюры Мк; In – момент инерции поперечного сечения
на данном участке.
Полученное выражение можно представить в виде произведения матрицы-строки на
матрицу-столбец следующим образом:
М уM
K
EI n
i
2l
2l
l
l
2l n
2l n
n M 0i n M 1i n M 0i
M 1i n M 0i
M 1i
6 EI n
6 EI n
6 EI n
6 EI n
6 EI n
6 EI n
M 0 K
f .
M
1K
В свою очередь матрицу-строку последнего равенства можно записать в виде произведения
матрицы-строки
М in M 0i M 1i
на матрицу коэффициентов
2l n
6 EI n
Dn
ln
6 EI n
2l n
6 EI n
2l n
6 EI n
ln
2 2 1
l
6 EI n
n
.
2l n
6 EI n 1 2 2
6 EI n
Таким образом, перемножение эпюр на участке n в матричной форме можно записать
следующим образом:
M уM
k
EI n
где M in
T
i
D M ,
M in
T
n
kn
- транспонированная матрица-столбец моментов по концам участка ln эпюры Мi; Dn -
матрица коэффициентов, которая носит название матрицы податливости для данного участка;
M - матрица-столбец моментов по концам участка l эпюры М .
n
kn
к
составлена из моментов, действующих по концам данного участка,
Матрица-столбец M k n
и стрелы подъема f параболического сегмента. Если на каком-либо участке отсутствует
распределенная нагрузка, то f=0. Например, для участка n+1 (рис.1,б) имеем
М M
M
;
3K
К n 1
Dn 1
2K
l n 1 2 1
.
6 EI 1 2
При суммировании результатов перемножения эпюр на отдельных участках в матричной
форме получим
M уМ
K
EI
i
M 0i M 1i M 2i M 3i
Dn
0
0
Dn 1
M 0 K
f
M 1K .
M
2K
M 3K
В большинстве случаев при составлении матриц {Mi} и {Mk} равные моменты на стыках
сопряженных участков можно записать один раз, но при этом матрицу податливости нужно как бы
сжать на один столбец и одну строку, сложив положившиеся элементы матрицы. Например, при
суммировании результатов перемножения на участках n и n+1(рис.1, а, б) можно вместо матрицы
податливости вида
2l n /( 6 EI n ) 2l n /( 6 EI n )
D
l n /( 6 EI n )
l n /( 6 EI n )
0
0
2l n /( 6 EI n ) 2l n /( 6 EI n )
0
0
0
0
0
2l n 1 /( 6 EI n 1 )
l n 1 /( 6 EI n 1 )
0
0
0
l n 1 /( 6 EI n 1 )
2l n 1 /( 6 EI n 1 )
записать матрицу
2l n /( 6 EI n ) 2l n /( 6 EI n )
D l n /( 6 EI n )
0
l n /( 6 EI n )
2l n /( 6 EI n ) 2l n /( 6 EI n ) 2l n 1 /( 6 EI n1 )
0
l n 1 /( 6 EI n 1 )
0
l n1 /( 6 EI n1 ) .
2l n1 /( 6 EI n1 )
Таким образом, для определения перемещения в данном направлении используется
следующее матричное равенство:
M 1 DM p ,
T
где {M1}T – транспонированная матрица-столбец моментов эпюры от единичной силы,
приложенной в направлении искомого перемещения; D-матрица податливости системы; {Mp} матрица-столбец моментов эпюры от заданной нагрузки.
При определении перемещений в нескольких направлениях перемножают одну и ту же
грузовую эпюру на эпюру от единичных сил, приложенных в направлении искомых перемещений.
Это можно записать одним матричным равенством:
{Δ}={Mi}TD{Mp},
где {Δ} - вектор искомых перемещений;{Mi}T – транспонированная матрица моментов от
единичных сил, приложенных по направлению искомых перемещений.
1.3. Матричная форма расчета статически неопределимых рам методом сил.
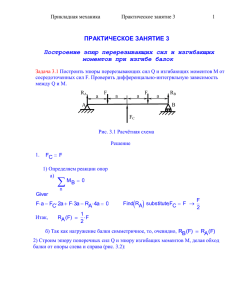
Рассмотрим основные приемы матричной формы расчета статически неопределимых рам
методом сил на примере простой рамы (рис.2).
Для определения коэффициентов и свободных членов канонических уравнений запишем
правило Верещагина в матричной форме:
11 М 1
2 1
0
0
l
l2
DM 1 0 l l
1 3 1 / 2 l 0 l l
6 EI
6 EI
l
0 1/ 2 1
12 М 1
2 1
0
0
l
l
DM 2 0 l l
1 3 1 / 2 0 0 l l
6 EI
6 EI
l
0 1/ 2 1
0
l3
;
l
/
2
l 4 EI
22 M 2
2 1
0
0
l
l
DM 2 0 0 l
1 3 1 / 2 0 0 0 l
6 EI
6 EI
l
0 1/ 2 1
0
3
l
.
l
/
2
l 6 EI
Т
Т
T
7l / 2 5l 3
;
3l / 2 6 EI
Определение коэффициентов δ11, δ12, δ22 можно записать одной матричной записью
2 1
0
0 0
12
l
l 3 5 / 6 1/ 4
.
ik
1 3 1/ 2 l 0
11
0 0 l 6 EI
6 EI 1 / 4 1 / 6 21 22
0 1/ 2 1
l l
0 l
l
В сокращенной форме эта запись имеет вид
δik=МikТ D Mik,
где δik-матрица коэффициентов канонических уравнений; МikТ- транспонированная матрица
моментов от единичных сил.
Для определения вектора грузовых перемещений воспользуемся формулой (2). Имеем
2 2
1
0
0
ql 2 / 8 ql 4
l
ip 0 0 l 1 2 3 1 / 2 ql 2 / 2
6 EI
3EI
0 0 1/ 2 1
2
3ql / 2
0 l
l
5/8
.
7 / 24
Систему канонических уравнений также можно записать в матричной форме
ik X i ip ,
где {Xi} - вектор искомых усилий.
Это уравнение в матричной форме решается путем обращения матрицы δik, т. е.
Х i ik1 ip ,
где δik-1 – обратная матрица по отношению к матрице δik.
В нашем случае
Det ik
l 3 5 / 6 1/ 4
11l 3
,
EI 1 / 4 1 / 6 324 EI
а обратная матрица имеет вид
ik1
324 EI 1 / 6 1 / 4
.
11l 3 1 / 4 5 / 6
Решение системы канонических уравнений дает
X i 324EI
3
11l
1/ 6
1/ 4
1/ 4
5/ 6
ql 4
EI
5/8
9 / 22
ql
.
7
/
24
25
/
22
Окончательные значения внутренних силовых факторов определяются по формулам
М Х М Р0 М 1 Х 1 М 2 Х 2 ... М i Х i ... М n Х n ;
Q X QP0 Q1 X 1 Q2 X 2 ... Q i X i ... Qn X n ;
N X N P0 N 1 X 1 N 2 X 2 ... N i X i ... N n X n ,
где М Р0 , QР0 , N Р0 - соответственно значения изгибающих моментов, поперечных и продольных сил
в основной системе от заданной нагрузки; М i , Qi , N i - соответственно значения изгибающих
моментов, поперечных и продольных сил от единичных нагрузок, приложенных в направлениях
действия лишних неизвестных.
В матричной форме их можно записать так:
М М Р0 М i X i ;
Q QP0 Qi X i ;
N N P0 N i X i ,
где
M
, Q
, N
0
P
0
P
0
P
- векторы внутренних сил в основной системе от заданных нагрузок;
М i , Qi , N i - матрицы усилий от единичных нагрузок, приложенных в направлении действия
лишних неизвестных; {Xi} – вектор искомых усилий.
Матричная формула полного решения задачи методом сил имеет следующий вид:
М М Р0 М i M iT DM i 1 M iT DM P .
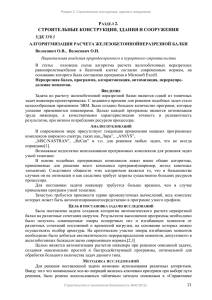
2. Расчет статически определимой рамы
2.1. Аналитическое решение
Дано:
P
II
5
III
5
P=14 кН
10
6
q=6 кН/м
4
7
IV
3
Найти:
2
Перемещение точки Е
5
8
I
1
E
Решение:
Данная система статически определима, так как число неизвестных реакций равно числу
уравнений статики.
1.
Строим грузовую эпюру
Находим изгибающие моменты участков рамы.
2.
.
Приложим в точке Е вертикальную нагрузку
Строим единичную эпюру
.
3.
Приложим в точке Е горизонтальную нагрузку
Строим единичную эпюру
.
.
.
4.
5.
Строим эпюру
Вычисляем единичные
канонических уравнений по формуле Мора:
6.
Находим свободные члены системы по формуле
Мора для прямолинейных участков, а для участков с распределенной нагрузкой по
формуле Симпсона:
7.
.
коэффициенты
системы
Проверка.
По формуле
коэффициентов:
проверяем
правильность
найденных
единичных
Проверка выполняется, т.е. единичные коэффициенты найдены верно.
Аналогично, для проверки правильности найденных свободных членов, используя
выражение
Очевидно, что
эпюры построены правильно.
получаем:
, следовательно, свободные члены найдены верно. Значит
75
75
70
10
75
145
10
18,75
65
5
5
5
5
5
5
5
2.2. Матричный способ расчёта
Для определения вертикального перемещения перемножим эпюры
и
отдельно на
горизонтальном и вертикальном участках и просуммируем результаты. На первом участке имеем
вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на первом участке;
от
– матрица податливости первого участка грузовой эпюры
, в том случае, когда на участке присутствует распределённая нагрузка;
участка;
– матрица-столбец моментов эпюры
- длина первого
от заданной нагрузки на первом
участке.
На втором участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на втором участке;
от
– матрица податливости второго участка грузовой эпюры
, в том случае, когда на участке отсутствует распределённая нагрузка;
участка;
– матрица-столбец моментов эпюры
- длина второго
от заданной нагрузки на втором
участке.
На третьем участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на третьем участке;
от
– матрица податливости третьего участка грузовой эпюры
, в том случае, когда на участке отсутствует распределённая нагрузка;
участка;
– матрица-столбец моментов эпюры
- длина третьего
от заданной нагрузки на третьем
участке.
На четвёртом участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на четвёртом участке;
от
– матрица податливости третьего участка грузовой эпюры
, в том случае, когда на участке отсутствует распределённая нагрузка;
участка;
– матрица-столбец моментов эпюры
участке.
Находим суммарное вертикальное перемещение
- длина четвёртого
от заданной нагрузки на четвёртом
Для определения горизонтального перемещения перемножим эпюры
и
отдельно на
горизонтальном и вертикальном участках и просуммируем результаты. На первом участке имеем
вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на первом участке;
от
На втором участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на втором участке;
от
На третьем участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на третьем участке;
от
На четвёртом участке имеем вертикальное перемещение
где
единичной силы
– транспонированная матрица-столбец моментов эпюры
на четвёртом участке;
от
Находим суммарное вертикальное перемещение
Полное перемещение находим по формуле
2.3. Программа в среде Matlab 6.5
L1=5; L2=10; L3=5; L4=5;
M11=[0,0];
D1=L1/6*[2,2,1;1,2,2]
Mp1=[0;18.5;30];
%Вертикальное перемещение точки Е рамы на первом участке:
delta11p=M11*D1*Mp1
M21=[0,-10];
D2=L2/6*[2,1;1,2]
Mp2=[75;75];
%Вертикальное перемещение точки Е рамы на втором участке:
delta21p=M21*D2*Mp2
M31=[0,0];
D3=L3/6*[2,1;1,2]
Mp3=[0;70];
%Вертикальное перемещение точки Е рамы на третьем участке:
delta31p=M31*D3*Mp3
M41=[-10,-10];
D4=L4/6*[2,1;1,2]
Mp4=[145;65];
%Вертикальное перемещение точки Е рамы на четвёртом участке:
delta41p=M41*D4*Mp4
%Суммарное вертикальное перемещение:
d1=delta11p+delta21p+delta31p+delta41p
M12=[0,5];
%Горизонтальное перемещение точки Е рамы на первом участке:
delta12p=M12*D1*Mp1
M22=[5,5];
%Горизонтальное перемещение точки Е рамы на втором участке:
delta22p=M22*D2*Mp2
M32=[0,0];
%Горизонтальное перемещение точки Е рамы на третьем участке:
delta32p=M32*D3*Mp3
M42=[5,5];
%Горизонтальное перемещение точки Е рамы на четвёртом участке:
delta42p=M42*D4*Mp4
%Суммарное горизонтальное перемещение:
d2=delta12p+delta22p+delta32p+delta42p
%Полное перемещение точки Е:
d=sqrt(d1.^2+d2.^2)
2.4. Результаты выполнения программы
D1 =
1.6667 1.6667 0.8333
0.8333 1.6667 1.6667
delta11p =
0
D2 =
3.3333 1.6667
1.6667 3.3333
delta21p =
-3750
D3 =
1.6667 0.8333
0.8333 1.6667
delta31p =
0
D4 =
1.6667 0.8333
0.8333 1.6667
delta41p =
-5250
d1 =
-9000
delta12p =
404.1667
delta22p =
3750
delta32p =
0
delta42p =
2625
d2 =
6.7792e+003
d=
3. Расчет статически неопределимой системы
1.1268e+004
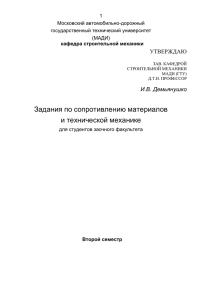
3.1. Аналитическое решение
3I
8
q=3
M=6
6I
2
1
1
Решение:
1.
Степень статической неопределимости:
2.
Система канонических уравнений метода сил:
3.
Составляем основную систему метода сил.
4.
Строим эпюры
растянутых волокнах.
,
,
:
,
по характерным точкам на
Определяем реакции:
Выполняем проверку правильности найденных реакций:
Следовательно реакции найдены верно.
Cтроим эпюру:
:
Находим опорные реакции:
Проверка:
Следовательно реакции найдены верно. Строим эпюру.
:
Находим опорные реакции:
Cтроим эпюру.
Cтроим эпюру
путём сложения
Находим
5.
и
Проверка:
Проверка выполняется.
Проверка:
6.
Находим
,
и
.
.
Эпюра
7.
2,8015
0,044
0,353
0,397
3,1985
0,022
0,1875
0,044
0,022
0,375
кН∙м
кН∙м
кН∙м
кН∙м
кН∙м
кН∙м
кН∙м
кН∙м
Эпюра QP
8.
0,0055
0,1765
кН
кН
кН
кН
Эпюра NP
9.
3,375
0,0055
y
x
кН
кН
Статическая проверка
10.
Статическая проверка выполняется.
Реакции
и
найдены следующим образом:
Определяем реакции:
Выполняем проверку правильности найденных реакций:
Следовательно реакции найдены верно.
3.2. Матричный способ расчёта.
1. Составим матрицы единичных, грузовой и суммарно-единичных эпюр:
2. Запишем матрицы податливости участков нагружения:
3. Матрица податливости необъединённых участков нагружения:
4. Находим матрицу податливости рамы:
5. Находим матрицу-столбец грузовых членов канонических уравнений метода сил:
Примем , что
– сумма грузовых членов и
сумма единичных коэффициентов канонических уравнений метода сил.
–
Что подтверждает правильность найденных коэффициентов.
6. Находим основные неизвестные канонических уравнений по формуле:
Для этого производим обращение матрицы:
и определяем Х1 и Х2:
.
7. Окончательную
эпюру
:
изгибающих
моментов
строим
по
суммарной
формуле
.
Кинематическая проверка
8. Составим матрицы перерезывающих сил от грузовой и единичных эпюр и найдём
окончательную эпюру по формуле
:
9. Найдём окончательную эпюру продольных сил по формуле
3.3. Программа в среде MATLAB 6.5
%Матрица моментов единичных эпюр
M=[0 0;-0.5 -2;-1 -4;-1 4;-0.5 2;-0.5 2;0 0;0 -8;0 0]
:
%Матрица моментов грузовой эпюры
Mp0=[0;0;0;0;3;-3;0;0;0]
%Матрица податливости необъединённых участков нагружения
D0=[0.0555 0 0 0 0 0 0 0 0;0 0.2222 0 0 0 0 0 0 0;0 0 0.0555 0 0 0 0 0 0;0 0 0 0.0555 0.0278 0 0 0 0;0
0 0 0.0278 0.0555 0 0 0 0;0 0 0 0 0 0.0555 0.0278 0 0;0 0 0 0 0 0.0278 0.0555 0 0;0 0 0 0 0 0 0 0.8889
0.4444;0 0 0 0 0 0 0 0.4444 0.8889]
%Матрица податливости рамы
D=M'*D0*M
%Матрица-столбец грузовых членов канонических уравнений метода сил
Dp=M'*D0*Mp0
%Матрица моментов суммарной эпюры
Ms=[0;-2.5;-5;3;1.5;1.5;0;-8;0]
%Сумма грузовых членов
summadeltaip=Mp0'*D0*Ms
%Сумма единичных коэффициентов канонических уравнений метода сил
summabik=Ms'*D0*Ms
%Обращение матрицы D
Dminus1=(1/(0.2223*60.4432-0*0))*[60.4432 0.0000;0.0000 0.2223]
%Основные неизвестные Х
X=-Dminus1*Dp
%Матрица окончательной эпюры изгибающих моментов
Mp=M*X+Mp0
%Матрица единичной эпюры М1
M1=[0;-0.5;-1;-1;-0.5;-0.5;0;0;0]
%Кинематическая проверка
Delta1p=M1'*D0*Mp
%Матрица эпюры перерезывающих сил от грузовой эпюры
Qp0=[0;0;0;-3;-3;-3;-3;0;0]
%Матрица эпюр перерезывающих сил от единичных эпюр
Q=[0.5 2;0.5 2;0.5 2;-0.5 2;-0.5 2;-0.5 2;-0.5 2;0 1;0 1]
%Матрица эпюры перерезывающих сил от окончательной эпюры
Qp=Q*X+Qp0
%Эпюра продольных сил от эпюры Np0
Np0=[0;0;0;0;0;0;0;3;3]
%Эпюра продольных сил от эпюры N1 и N2
N=[0 -1;0 -1;0 -1;0 0;0 0;0 0;0 0;1 0;1 0]
%Эпюра продольных сил от эпюры Np
Np=N*X+Np0
%Статическая проверка
summaFx=-0.055+0.055
summaFy=3.1765+3.1985-0.375-6
summaMa=-6.397+6.397
3.4. Результаты выполнения программы
M=
0
0
-0.5000 -2.0000
-1.0000 -4.0000
-1.0000 4.0000
-0.5000 2.0000
-0.5000 2.0000
0
0
0 -8.0000
0
Mp0 =
0
0
0
0
0
3
-3
0
0
0
D0 =
Columns 1 through 8
0.0555
0
0
0
0
0
0
0
0 0.2222
0
0
0
0
0
0
0 0.0555
0
0
0
0
0
0
0
0
0 0.0555 0.0278
0
0
0
0 0.0278 0.0555
0
0
0
0
0
0
0
0
0
0
0
0 0.0555 0.0278
0
0
0
0 0.0278
0
0
0
0
0
0
0
0
0
Column 9
0
0
0
0
0
0
0.0555
0
0
0.8889
0 0.4444
0
0
0
0
0.4444
0.8889
D=
0.2221 0.0000
0.0000 60.4432
Dp =
-0.0834
0.3336
Ms =
0
-2.5000
-5.0000
3.0000
1.5000
1.5000
0
-8.0000
0
summadeltaip =
0.2502
summabik =
60.6653
Dminus1 =
4.4984
0
0 0.0165
X=
0.3752
-0.0055
Mp =
0
-0.1765
-0.3531
-0.3972
2.8014
-3.1986
0
0.0442
0
M1 =
0
-0.5000
-1.0000
-1.0000
-0.5000
-0.5000
0
0
0
Delta1p =
-7.5034e-005
Qp0 =
0
0
0
-3
-3
-3
-3
0
0
Q=
0.5000 2.0000
0.5000 2.0000
0.5000 2.0000
-0.5000 2.0000
-0.5000 2.0000
-0.5000 2.0000
-0.5000 2.0000
0 1.0000
0 1.0000
Qp =
0.1765
0.1765
0.1765
-3.1986
-3.1986
-3.1986
-3.1986
-0.0055
-0.0055
Np0 =
0
0
0
0
0
0
0
3
3
N=
0 -1
0 -1
0 -1
0
0
0
0
0
0
0
0
1
0
1
0
Np =
0.0055
0.0055
0.0055
0
0
0
0
3.3752
3.3752
summaFx =
0
summaFy =
0
summaMa =
0
4. Литература
1. Бурчаков Ю.И.; Гнедин В.Е.; Денисов В.М. Строительная механика. М.: Высшая школа. 1983. 255
с.
2. Живейнов Н.Н.; Карасев Г.Н.; Цвей И.Ю. Строительная механика и металлоконструкции
строительных и дорожных машин. М.: Машиностроение. 1988. 280 с.
3. Киселев В.А. Строительная механика. М.: Стройиздат. 1986. 520 с.