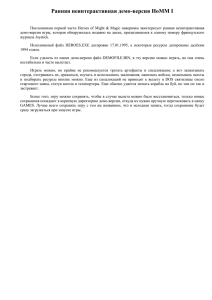
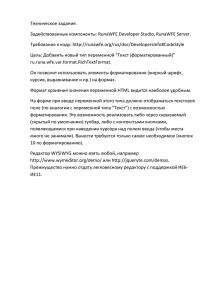
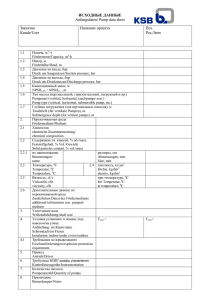
Министерство образования и науки РФ Федеральное государственное автономное образовательное учреждение высшего образования “Санкт-Петербургский государственный электротехнический университет “ЛЭТИ” им. В.И. Ульянова (Ленина)” (СПбГЭТУ“ЛЭТИ”) Факультет компьютерных технологий и информатики Кафедра автоматики и процессов управления ОТЧЕТ по лабораторной работе № 1 по дисциплине "Нечеткие системы управления" Описание и принцип действия нечетких систем управления Вариант 2 «Торможение автомобиля на трассе» Выполнил: Мельников В.Ю. Факультет КТИ Группа № 4391 Преподаватель: Кораблев Ю.А. Постановка задачи. Описать методами теории нечетких множеств и нечеткой логики процесс согласно варианту задания и изучить принцип действия полученной в результате нечеткой системы управления. Нечетная система управления состоит из двух входных сигналов (скорость и дистанция) и выходного сигнала (тормоз). Введем необходимые лингвистические переменные, укажем название переменной и область значения. Затем для каждой переменной укажем тремы. Рис. 1. Лингвистическая переменная Speed Рис. 2. Лингвистическая переменная Distance Рис. 3. Лингвистическая переменная Brake Рис. 4. Параметры лингвистической переменной Speed Выполним ряд операция со сформированными нечеткими множествами: 1) Для всех сформированных множеств определим значения контролируемых и управляющих параметров, имеющих степень принадлежности соответствующему нечеткому множеству равную 0.25 Рис. 5. Значение функции лингвистической переменной Speed Speed VeryFast Fast Medium Low None Left 88.5 60.5 30 0 Right 120 90.5 60 30 Рис. 6. Значение функции лингвистической переменной Distance Distance VeryFar Far Medium Close VeryClose Left 250 170 80 10 Right 350 250 175.5 80 Рис. 7. Значение функции лингвистической переменной Brake Brake 99 75 50 25 None Left 0.75 0.5 0.25 0 Right 1 0.75 0.5 0.25 Зафиксируем результаты применения операции нечеткого отрицания к лингвистической переменной Speed Рис. 8. Оператор NICHT Рис. 10. Оператор Dilationsoperator Рис. 9. Оператор Konzentrationsoperator Рис. 11. Оператор Dilationsoperator Рис. 11. Оператор Kontrastintensivierung Далее выберем нечеткое множество с двумя пересекающимся функциями принадлежности и исследуем различные варианты реализации логической операции «И» Рис. 12. Minimum-UND Рис. 13. Minimum-Bound Рис. 14. Minimum-Algebraic product Следующим шагом выберем два нечетких множества с пересекающимися функциями принадлежности и исследуем различные варианты реализации нечеткой логической операции «ИЛИ» Рис. 15. ODER-MAXIMUM Рис. 16. ODER-Bounded Sum Рис. 17. ODER-Algebraic Sum Создадим базу правил, определяющих стратегию управления заданным процессом. Рис. 18. База правил Далее исследуем принцип действия нечетких систем управления. Сформируем передаточные характеристики для всех комбинаций методов логических выводов. Сформируем передаточные характеристики в виде двухмерной матрицы, где входные переменные играют роль индексов матрицы, а содержимое элементов матрицы образуют значения выходной переменной. Speed 12 45 60 90 120 0,6 0,89 0,999 0,999 0,999 0,254 0,645 0,75 0,811 0,999 Distance 0,11 0,107 0,322 0,257 0,651 0,575 0,816 0,813 0.999 0,999 0,094 0,175 0,5 0,675 0,856 12 0,091 0,081 0,056 0,5 Затем, на основе полученных передаточных характеристик, определим значения входных переменных, при которых выходная переменная равна 0.7 ее максимального значения. Distance = Speed = Break = значение VERY CLOSE LOW P2 0.55 VERY CLOSE MEDIUM P1 0.20 CLOSE LOW P3 0.45 Таблица 1. Speed = 35, Distance = 42.3 Distance = Speed = Break = значение VERY CLOSE LOW P2 0.17 VERY CLOSE MEDIUM P1 0.17 CLOSE LOW P3 0.40 CLOSE MEDIUM P2 0.60 Таблица 2. Speed = 48, Distance = 70 Distance = Speed = Break = значение CLOSE MEDIUM P2 0.60 CLOSE FAST P2 0.40 MEDIUM MEDIUM P3 0.14 MEDIUM FAST P2 0.14 Таблица 3. Speed = 72, Distance = 93 Distance = Speed = Break = значение CLOSE MEDIUM P2 0.20 CLOSE FAST P2 0.80 MEDIUM MEDIUM P3 0.15 MEDIUM FAST P2 0.15 Таблица 4. Speed = 84, Distance = 93.4 Distance = Speed = Break = значение MEDIUM FAST P2 0.16 MEDIUM Very far P1 0.16 FAR FAST P3 0.40 FAR Very far P2 0.60 Таблица 5. Speed = 110, Distance = 245.2 Вывод: в ходе выполнения данной лабораторной работы был изучен процесс торможения автомобиля методом теории нечетких множеств и нечеткой логики. Был получен практический опыт разработки Fuzzy контроллеров