БУБНОВА Татьяна Алексеевна
реклама

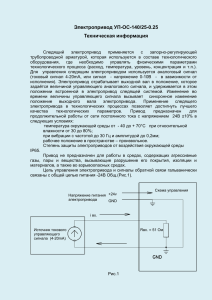
На правах рукописи БУБНОВА Татьяна Алексеевна СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ ДЛЯ ОБЗОРНО-ПОИСКОВЫХ СИСТЕМ Специальность 05.09.03 – Электротехнические комплексы и системы АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Омск – 2011 Работа выполнена в Омском государственном техническом университете на кафедре «Электроснабжение промышленных предприятий». Научный руководитель: доктор технических наук, доцент Бубнов Алексей Владимирович Официальные оппоненты: доктор технических наук, профессор Ковалев Владимир Захарович кандидат технических наук, доцент Руппель Алексей Александрович Ведущая организация – ГОУ ВПО «Новосибирский государственный технический университет», г. Новосибирск Защита диссертации состоится «29» июня 2011 г. в 1600 час. на заседании диссертационного совета ДМ 212.178.03 при ГОУ ВПО «Омский государственный технический университет» по адресу: 644050, г. Омск, пр. Мира, 11, ауд. 6-340. С диссертацией можно ознакомиться в библиотеке ГОУ ВПО «Омский государственный технический университет». Автореферат разослан «27» мая 2011 г. Отзывы на автореферат в двух экземплярах, заверенные гербовой печатью, просим направлять в адрес диссертационного совета ДМ 212.178.03. Ученый секретарь диссертационного совета Р. Н. Хамитов 2 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы. Синхронно-синфазные электроприводы (ССЭ) находят широкое применение в обзорно-поисковых и сканирующих системах и устройствах, в системах технического зрения современных робототехнических комплексов, установках фототелеграфной и видеозаписывающей аппаратуры, копировальных установках, что обусловлено их высокими точностными показателями и широким диапазоном регулирования угловой скорости. Основы теории построения прецизионных синхронно-синфазных электроприводов заложены в работах Р. М. Трахтенберга. Экспериментальные и теоретические исследования в этой области проводились различными научными коллективами. Значительный вклад в решение вопросов проектирования ССЭ внесли И. В. Булин-Соколов, В. И. Стребков, Б. А. Староверов, А. В. Ханаев, А. А. Киселев, В. П. Галас, М. В. Фалеев, Л. М. Осипов, Вл. В. Андрущук, Вас. В. Андрущук, В. Н. Зажирко, А. М. Сутормин, Б. М. Ямановский, В. Г. Кавко, А. В. Бубнов и др. На этой основе спроектировано значительное количество электроприводов для различных областей применения, разработаны новые способы регулирования и новые технические решения построения ССЭ. Однако вопросы анализа динамики и разработки следящего синхронно-синфазного электропривода, обеспечивающего переход с одной заданной частоты вращения на другую без размыкания системы автоматического управления (САУ), рассмотрены недостаточно полно. Настоящая работа выполнена в рамках гранта Российского фонда фундаментальных исследований № 08-08-00372-а «Анализ и синтез прецизионного синхронно-синфазного электропривода функционирующего в широком диапазоне регулирования скорости» и Аналитической ведомственной целевой программы «Развитие научного потенциала высшей школы», проекты № 2.1.2/4475 и № 2.1.2/11230 «Исследование динамики и разработка новых способов регулирования синхронно-синфазного электропривода для обзорно-поисковых систем». Цель диссертационной работы – разработка способа комбинированного управления синхронно-синфазным электроприводом обзорно-поисковой системы, позволяющего осуществлять регулирование в переходных режимах электропривода без размыкания системы автоматического управления. Для достижения указанной цели необходимо решить следующие задачи: 1. Разработать усовершенствованные алгоритмы работы логического устройства сравнения (ЛУС). 2. Продолжить исследование влияния уровня токоограничения электродвигателя и алгоритмов работы системы управления на динамику электропривода. 3. Разработать быстродействующий фазирующий регулятор с пошаговым доворотом вала электродвигателя. 4. Разработать способ регулирования ССЭ без размыкания системы автоматического управления в переходных режимах при изменении задающего сигнала. 3 5. Осуществить проверку разработанных алгоритмов и способов путем компьютерного моделирования синхронно-синфазного электропривода. Методы исследования. При теоретическом исследовании режима синхронизации электропривода использовался метод фазовой плоскости. Применялись частотные методы анализа систем управления, модальный метод синтеза систем. Разработка алгоритмов работы и средств построения функциональных узлов ССЭ проводилась с применением основ теории автоматического управления, теории цепей, теории электрических машин, теории графов, методов математического моделирования. Основные расчетные соотношения получены с применением преобразований Лапласа, дифференциального и интегрального исчисления. Теоретические положения и разработанные технические решения проверялись путем моделирования в среде MATLAB. Научная новизна работы заключается в следующем. 1. Разработаны алгоритмы работы импульсного частотно-фазового дискриминатора (ИЧФД) с расширенными функциональными возможностями (индикация режимов работы и определение угловой ошибки электропривода). 2. Разработан способ фазирования с пошаговым доворотом вала электродвигателя, позволяющий уменьшить время фазирования за счет автоматического определения момента разблокировки ИЧФД в каждом цикле фазирования. 3. Разработан способ комбинированного управления по задающему воздействию синхронно-синфазного электропривода при изменении сигнала задания частоты вращения, позволяющий повысить качество регулирования в переходных режимах работы ССЭ за счет осуществления перехода с одной угловой скорости на другую без размыкания системы автоматического управления. Практическая ценность работы. 1. Разработаны и подтверждены патентами на полезную модель схема ИЧФД с расширенными функциональными возможностями и схема демодуляции выходного ШИМ-сигнала ИЧФД с расширенным диапазоном рабочих частот. 2. Использование результатов сравнительного анализа способов регулирования ЭПФС и алгоритмов работы его отдельных узлов позволяет в зависимости от предъявляемых к электроприводу технических требований выбрать наиболее подходящие схемные решения. 3. Разработана схема фазирующего регулятора, реализующего алгоритм пошагового доворота вала электродвигателя, позволяющая уменьшить время фазирования за счет автоматического определения момента разблокировки ИЧФД в каждом цикле фазирования. 4. Разработанный алгоритм работы блока задания частоты, реализующий способ комбинированного управления по задающему воздействию синхронно-синфазным электроприводом при изменении сигнала задания частоты вращения, позволит повысить качество регулирования в переходных режимах работы ССЭ за счет осуществления перехода с одной угловой скорости 4 на другую без размыкания системы автоматического управления и, соответственно, уменьшить потери информации в обзорно-поисковых и сканирующих системах. Реализация результатов работы Учебное пособие «Системы прецизионного электропривода» авторов Бубнова А. В., Бубновой Т. А., Федорова В. Л. и электронный учебник по дисциплине «Электрический привод» авторов Федорова В. Л., Бубновой Т. А. используется студентами специальности 210106.65 «Промышленная электроника» и специальности 140211.65 «Электроснабжение» при изучении дисциплин «Основы теории автоматического управления», «Электрический привод», «Автоматизированный электропривод», «Системы прецизионного электропривода». Алгоритмы работы импульсного частотно-фазового дискриминатора, позволяющие расширить его функциональные возможности (индикация режимов работы, возможность определения угловой ошибки электропривода); алгоритм функционирования блока задания частоты при работе синхронно-синфазного электропривода в переходных режимах; рекомендации по выбору основных узлов синхронно-синфазного электропривода использовались в ОАО «Центральное конструкторское бюро автоматики» при разработке прецизионных электроприводов. Апробация работы. Основные положения диссертационной работы докладывались и обсуждались на: – VII Международной научно-технической конференции «Динамика систем, механизмов и машин», г. Омск, в 2009 г.; – I, II и III Всероссийских научно-технических конференциях «Россия молодая : передовые технологии – в промышленность», г. Омск, в 2008, 2009 и 2010 гг; – II Региональной научно-технической конференции «Омский регион – месторождение возможностей», г. Омск, в 2011 г.; – научных семинарах кафедры. Публикации. По результатам выполненных исследований опубликовано 23 научные работы, в том числе: статья в журнале «Известия вузов. Электромеханика», статья в журнале «Электротехника», 4 статьи в журнале «Омский научный вестник», монография, 2 патента на полезную модель. Структура и объем работы. Диссертационная работа состоит из введения, четырех глав и заключения, выполнена на 161 странице основного текста, содержит 73 рисунка и 4 таблицы, список используемой литературы из 84 наименований и приложение на 3 страницах. Общий объем диссертации – 164 страницы. ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность темы, сформулированы цель и основные задачи работы, характеризуется научная новизна и практическая ценность результатов исследований. 5 В первой главе на основе сравнительного анализа систем оптико-механической развертки (ОМР) на основе ССЭ и матричных тепловизионных систем сделан вывод о целесообразности использования электромеханических обзорно-поисковых и сканирующих систем при реализации метода бескадрового непрерывно-построчного сканирования. На основе анализа показателей назначения узла ОМР и комплекса ограничений определены требования к электроприводу сканирующей системы. Важнейшим требованием, следующим из показателя назначения узла ОМР «минимум потерь информации при перестройке частоты сканирования», является организация отработки скачка задания частоты вращения без выхода электропривода в режимы разомкнутого управления. Данное требование определило дальнейшие исследования, результаты которых приведены в последующих главах. Во второй главе проведен сравнительный анализ способов регулирования ССЭ и работы его основных узлов и определены перспективные направления их усовершенствования для улучшения качества регулирования. Синхронно-синфазный электропривод (рис. 1, где БЗЧ – блок задания частоты, формирующий задающую частоту fоп и импульсы угловой привязки Fоп ; ГВЧ – кварцевый генератор высокой частоты fг ; ДЧ1 и ДЧ2 – управляемый двоичным кодом N и неуправляемый делители частоты; ФР – фазирующий регулятор; КУ – корректирующее устройство; ЭД – электродвигатель; ИДЧ – импульсный датчик частоты вращения, формирующий z импульсов за оборот вала электродвигателя; ДП – датчик положения) строится на основе ЭПФС. N ГВЧ fг ДЧ1 fоп ДЧ2 БЗЧ Fоп ЭПФС fоп' ФР ЛУС КУ fос ЭД ИДЧ Fос ДП Рис. 1. Структурная схема синхронно-синфазного электропривода В основе построения ЭПФС лежит принцип фазовой автоподстройки частоты (ФАПЧ), в соответствии с которым в замкнутой системе автоматического управления в качестве задающего сигнала используется частотный сигнал fоп , формируемый с помощью кварцевого генератора; в качестве сигнала обратной связи – частотный сигнал fос , формируемый с помощью импульсного преобразователя выходной координаты системы автоматического управления; а в качестве сравнивающего элемента – логическое устройство сравнения частот и фаз двух импульсных последовательностей. 6 Система синхронно-синфазных электроприводов (рис. 2) представляет собой совокупность блока задания частоты и одного или нескольких синхронно-синфазных электроприводов (ССЭ1, ССЭ2, …), связанных с БЗЧ только односторонними каналами связи. fос' ИДЧ1 ССЭ1 N fоп ДП1 ' Fос БЗЧ Fоп fос'' ИДЧ2 ССЭ2 F''ос ДП2 Рис. 2. Структурная схема системы синхронно-синфазных электроприводов Доворот каждого ведомого вала на целое число делений ИДЧ для устранения углового рассогласования в синхронном режиме работы, обусловленного наличием z линейных зон импульсного частотно-фазового дискриминатора, соответствует начальной установке углового положения (фазированию) вала электродвигателя. Обычно реализуется алгоритм последовательной стыковки во времени процессов синхронизации и фазирования. Быстродействие такого способа фазирования может быть получено близким к оптимальному вследствие релейного алгоритма управления (по отклонению частоты вращения от заданной) в режимах насыщения ЛУС. В обзорно-поисковых системах, реализующих метод бескадрового непрерывно-построчного сканирования, с частой перестройкой частоты вращения ССЭ происходят большие потери информации в переходных режимах работы электропривода. Для устранения этого недостатка требуется разработка новых способов регулирования ССЭ, обеспечивающих переход с одной частоты вращения на другую без размыкания САУ. Реализация таких способов управления возможна при условии тщательной проработки основных узлов электропривода и разработки усовершенствованных алгоритмов их функционирования. Основной особенностью ЭПФС является наличие ЛУС, представляющего собой цифровое устройство и реализующего алгоритм сравнения двух частотных сигналов: опорного fоп и контролируемого fос , который основан на логической обработке порядка следования во времени импульсов этих частот. В качестве ЛУС обычно используется ИЧФД, однако его применение в современных системах управления ЭПФС требует реализации в нем дополнительных функций (индикация режимов работы, определение угловой ошибки электропривода и др.). Для использования в ССЭ предлагается 7 функциональная схема ИЧФД (рис. 3а, где БФС – блок фазового сравнения) с индикацией режимов работы. l=0 fос l fос fоп БФС Н ' D Т1 C D Т2 C Т2 fоп fос fоп Р П 1 Т fос П3 l=0 fос Р4 l=0 а l=0 Т1 fоп fоп fос fос П2 l=0 fоп Р3 l=0 fоп fос П1 l=1 fоп fос Р2 l=1 fоп fос Р1 fоп l=1 б Рис. 3. Функциональная схема и граф переходов ИЧФД с расширенными функциональными возможностями Для индикации режимов работы ИЧФД используются два блокирующих триггера и схема ИЛИ-НЕ. Информация в триггеры записывается в моменты прихода импульсов опорной частоты fоп. Полный граф переходов рассмотренного импульсного частотно-фазового дискриминатора изображен на рис. 3б. В этом графе разделены состояния Т (торможение), П (пропорциональный режим) и Р (разгон), переход между ними осуществляется в моменты прихода импульсов частоты fоп. Наряду с определением фазовой ошибки импульсов сравниваемых частот в частотно-фазовом дискриминаторе предлагается реализовать алгоритм определения угловой ошибки электропривода (рис. 4), что позволит использовать его комплексно в синхронно-синфазном электроприводе. В любом режиме работы импульсный частотно-фазовый дискриминатор позволяет непрерывно определять угловую ошибку электропривода. С этой целью определяется начальное значение угловой ошибки путем подсчета количества импульсов частоты fоп между импульсом угловой привязки Fоп и импульсом Fос с выхода датчика положения электропривода. Полученное значение сохраняется в выходном реверсивном счетчике импульсов. Далее это значение корректируется в моменты прихода двух импульсов одной частоты между двумя соседними импульсами другой частоты на величину углового расстояния между соседними метками импульсного датчика частоты вращения электропривода. В результате на выходе реверсивного счетчика импульсов непрерывно формируется текущее значение угловой ошибки электропривода. 8 fос –– D БФС Н fоп D П Т1 C D Т Т2 C ЛУ D C Fоп БЛБ СИ1 Daфн C СИ2 +1 −1 R Fос y1 y2 ДШ y3 x2 y4 D Т3 C x1 ЦК 0/2 1 ЦК 2/2 2 Рис. 4. Функциональная электрическая схема частотно-фазового дискриминатора с определением угловой ошибки электропривода Для повышения точности измерения фазового рассогласования в области низких частот входных импульсных сигналов предлагается функциональная схема демодулятора выходного сигнала импульсного частотно-фазового дискриминатора (рис. 5) с коррекцией выходного сигнала. Предложенная схема демодулятора выходного сигнала ИЧФД позволяет уменьшить погрешность преобразования фазовой ошибки в области низких частот, при этом наиболее высокая точность обеспечивается при фазовой ошибке, стремящейся к 0. fоп БФС Uв U/2 C Uр CВХ1 fос Uи В Uвых R ФИ UФИ C U1к CВХ2 Uк R 1 Рис. 5. Функциональная схема демодулятора выходного сигнала импульсного частотно-фазового дискриминатора Для повышения быстродействия в режиме фазирования предлагается схема синхронно-синфазного электропривода, представленная на рис. 6, где ДПР – датчик положения ротора; БСИ1 и БСИ2 – блоки суммирования 9 импульсов; ЧФД – частотно-фазовый дискриминатор; БК – блок коррекции; СП – статический преобразователь; БОФР – блок определения фазового рассогласования; ФДИ – формирователь дополнительных импульсов. СМ f ' оп БСИ1 fос' ЧФД fоп БЗЧ Fоп БИД БК СП ЭД ИДЧ БСИ2 ФДИ БОФР fос ДПР Fос Ф Рис. 6. Функциональная схема синхронно-синфазного электропривода Введение в формирователь дополнительных импульсов нелинейного элемента с зоной нечувствительности позволяет в режиме фазирования осуществлять перевод электропривода в пропорциональный режим работы в момент уменьшения значения фазовой ошибки на выходе частотно-фазового дискриминатора до величины, задаваемой шириной зоны нечувствительности нелинейного элемента, что позволяет повысить быстродействие электропривода в режиме фазирования особенно в области низких частот вращения за счет уменьшения продолжительности цикла фазирования. Работа электропривода (при отработке отрицательного фазового рассогласования) поясняется фазовым портретом (рис. 7, где цифрами обозначены моменты изменения режима работы). D 0 3 5 4 -7p/z 2 -5p/z 7 6 -3p/z -p/z 8 0 D p/z 3p/z 1 Рис. 7. Фазовый портрет работы синхронно-синфазного электропривода Предложенные усовершенствования ССЭ обеспечивают основу для реализации следящих режимов в электроприводе. В третьей главе проведен сравнительный анализ способов регулирования ССЭ в переходных режимах без размыкания системы автоматического управления. Для повышения качества регулирования в переходных режимах работы ССЭ предложено использовать систему автоматического управления с комбинированным управлением по задающему воздействию. Для организации комбинированного управления по задающему воздействию в структурную схему ЭПФС введен измерительный элемент (ИЭ) 10 величины скачка задания Dfc и функциональный преобразователь (ФП) для формирования компенсирующего сигнала Dfдоп (рис. 8). ИЭ N НЭ Dfс ФП Dfдоб Df fоп fос Рис. 8. Структурная схема организации комбинированного управления по задающему воздействию В результате в ЭПФС осуществляется замена скачка задающего сигнала Dfc линейным изменением задающего сигнала fоп , которое может быть отработано в электроприводе без выхода в режимы насыщения. Данный способ регулирования может быть отражен в модели ЭПФС в виде цепи формирования компенсирующего сигнала (рис. 9). НЭ ЭЗ РЭ Dfс fоп ЗУ И Dfс' сброс в0 сброс в0 Dfи Dfдоб ЭС S Т R Рис. 9. Функциональная схема организации комбинированного управления по задающему воздействию Для практической реализации рассмотренного алгоритма регулирования при отработке скачка сигнала задающей частоты предлагается осуществлять переход с задающей частоты f оп i (код задания N i ) на частоту fоп i 1 (код задания N i 1 ) путем чередования N i и N i 1 по закону, обеспечивающему линейное нарастание сигнала задания f оп и, соответственно, угловой частоты з . В этом случае номер импульса mn , следующего с периодом Ti 1 , определяется из выражения mn 2K n , - з1 где K – количество периодов Ti на интервале регулирования t р з2 , ф ф 0,8 max , n = 1, 2, 3,… Условие полного перехода на частоту fоп i 1 записывается в виде 1 2K n 1 - n . 11 На рис. 10 приведены графики изменения во времени задающих сигналов угловой скорости з t и угла a з t : 1) при скачкообразном изменении задающей частоты; 2) при замене скачкообразного изменения задающего сигнала ступенчатым, при этом график a з t представляет собой отрезки прямых с различными наклонами; 3) при линейном регулировании задающей частоты з з1 фt с постоянным ускорением ф 0,8 max , при этом график a з t представляет собой сумму линейно изменяющейся функции и параболы. з 1 з(Ni+1) з(Ni+0,75) 3 з(Ni+0,5) 2 з(Ni+0,25) з(Ni) aз t0 t1 t1' t2 t3 t 1 3 2 t0 t1 t1' t2 t3 t Рис. 10. Графики изменения во времени задающих сигналов угловой скорости и угла Предложенный алгоритм регулирования обеспечивает переход ССЭ с одной частоты вращения на другую без превышения допустимой угловой ошибки, что позволяет полностью исключить потерю информации и, тем самым, повысить качество работы и производительность аппаратуры обзорно-поисковой системы. В четвертой главе проведены исследования компьютерной модели синхронно-синфазного электропривода в режимах синхронизации, фазирования и отработки скачкообразного изменения сигнала задания в программе MATLAB. Результаты компьютерного моделирования ЭПФС в режиме синхронизации с учетом реального токоограничения электродвигателя позволяют сделать вывод о целесообразности выбора коэффициента усиления корректирующего устройства в диапазоне от 10 до 15 при использовании в ЭПФС токоограничения, соответствующего выходному сигналу ЛУС в режиме 12 насыщения, и возможности увеличения коэффициента усиления до 50 при трехкратном увеличении уровня токоограничения. Результаты компьютерного моделирования ССЭ в режиме фазирования подтверждают эффективность разработанного способа фазирования с пошаговым доворотом вала электродвигателя с автоматическим определением момента времени разблокировки ЛУС в каждом цикле фазирования. Разработана компьютерная модель ССЭ с комбинированным управлением по задающему воздействию (рис. 11) для исследования режима отработки электроприводом скачка задающего сигнала, и проведено ее исследование при различных значениях задаваемого углового ускорения электропривода (рис. 12). Полученные результаты моделирования практически подтверждают достоверность основных теоретических положений диссертационной работы. Рис. 11. Компьютерная модель ССЭ с комбинированным управлением по задающему воздействию В заключении сформулированы основные результаты диссертационной работы и выводы. В приложении приведены материалы о внедрении результатов диссертационной работы. 13 Рис. 12. Временные диаграммы и фазовый портрет работы ССЭ с комбинированным управлением по задающему воздействию 14 ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ 1. На основе сравнительного анализа способов регулирования ССЭ сделан вывод о целесообразности использования в электроприводе комбинированного управления по задающему воздействию в переходных режимах работы при изменении сигнала задания. 2. Разработаны алгоритмы работы ИЧФД с индикацией режимов работы (получен патент на полезную модель) и с определением угловой ошибки электропривода. 3. Разработана схема демодуляции выходного ШИМ-сигнала ИЧФД с расширенным диапазоном рабочих частот (получен патент на полезную модель). 4. Разработан способ фазирования с пошаговым доворотом вала электродвигателя, позволяющий уменьшить время фазирования за счет автоматического определения момента разблокировки ИЧФД в каждом цикле фазирования. 5. Разработан способ комбинированного управления по задающему воздействию синхронно-синфазного электропривода при изменении сигнала задания частоты вращения, позволяющий осуществлять переход с одной угловой скорости на другую без размыкания контура ФАПЧ. 6. На основе компьютерной модели ССЭ проведено исследование предложенных алгоритмов работы ССЭ и полученные результаты моделирования подтверждают эффективность разработанных способов регулирования. СПИСОК РАБОТ, ОПУБЛИКОВАННЫХ ПО ТЕМЕ ДИССЕРТАЦИИ 1. Бубнова, Т. А. Способ регулирования синхронно-синфазного электропривода при ступенчатом изменении сигнала задания частоты вращения / А. В. Бубнов, Т. А. Бубнова // Известия вузов. Электромеханика. – 2010. – № 1. – С. 44–48. 2. Бубнова, Т. А. Способы фазирования электропривода с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова // Электротехника. – 2010. – № 5. – С. 2–8. 3. Бубнова, Т. А. Анализ влияния параметров регулятора и способа регулирования на динамику электропривода с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова, П. А. Катрич, А. И. Лыченков // Омский научный вестник. Серия «Приборы, машины и технологии». – 2008. – № 4(73). – С. 117–122. 4. Бубнова, Т. А. Вопросы коррекции оборотных погрешностей измерительных преобразователей частоты вращения в электроприводе с фазовой синхронизацией / Т. А. Бубнова, А. В. Бубнов // Омский научный вестник. Серия «Приборы, машины и технологии». – 2008. – № 4(73). – С. 123–127. 5. Бубнова, Т. А. Следящий синхронно-синфазный электропривод для обзорно-поисковых систем / Т. А. Бубнова, А. В. Бубнов, П. А. Катрич // Омский научный вестник. Серия «Приборы, машины и технологии». – 2009. – № 1(77). – С. 147–151. 15 6. Бубнова, Т. А. Логическое устройство сравнения для систем фазовой автоподстройки частоты / А. В. Бубнов, Т. А. Бубнова, М. В. Гокова, В. Л. Федоров // Омский научный вестник. Серия «Приборы, машины и технологии». – 2009. – № 3(83). – С. 223–227. 7. Бубнова, Т. А. Современное состояние и перспективы развития теории синхронно-синфазного электропривода : Монография / Бубнов А. В., Бубнова Т. А., Федоров В. Л. – Омск : ОмГТУ, 2010. – 104 с. 8. Пат. 95439 РФ, МПК H 03 D 13/00. Импульсный частотно-фазовый дискриминатор / А. В. Бубнов, Т. А. Бубнова (РФ) – 2009146798/22; Заявлено 16.12.2009; Опубл. 27.06.2010, Бюл. № 18. – 1 с.: ил. 9. Пат. 98653 РФ, МПК H03D 13/00. Импульсно-фазовый дискриминатор / А. В. Бубнов, В. Л. Федоров, А. Н. Алпысова, Т. А. Бубнова (РФ) – 2010119980/09; Заявлено 18.05.2010; Опубл. 20.10.2010, Бюл. № 29. – 1 с. 10. Бубнова, Т. А. Алгоритмы управления электроприводов с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова // Россия молодая : передовые технологии – в промышленность : матер. Всерос. науч.-техн. конф. – Омск, 2008. – Кн. 3. – С. 22–26. 11. Бубнова, Т. А. Следящий синхронно-синфазный электропривод / А. В. Бубнов, Т. А. Бубнова, П. А. Катрич // Россия молодая : передовые технологии – в промышленность : матер. II Всерос. молодежн. науч.-техн. конф. – Омск, 2009. – Кн. 3. – С. 11–15. 12. Бубнова, Т. А. Алгоритмы управления электроприводом с фазовой синхронизацией при изменении сигнала задания / А. В. Бубнов, Т. А. Бубнова, А. Н. Алпысова // Динамика систем, механизмов и машин : Матер. VII Междунар. науч.-техн. конф. – Омск, 2009. – Кн. 1. – С. 125–130. 13. Бубнова, Т. А. Логическое устройство сравнения для электропривода с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова, М. В. Гокова, В. Л. Федоров // Динамика систем, механизмов и машин : Матер. VII Междунар. науч.-техн. конф. – Омск, 2009. – Кн. 1. – С. 130–134. 14. Бубнова, Т. А. Организация режима пошагового фазирования в синхронно-синфазном электроприводе / А. В. Бубнов, Т. А. Бубнова, М. В. Гокова // Россия молодая : передовые технологии – в промышленность : матер. III Всерос. молодежн. науч.-техн. конф. – Омск, 2010. – Кн. 2. – С. 11–16. 15. Бубнова, Т. А. Алгоритмы работы логического устройства сравнения для электропривода с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова, М. В. Гокова, Л. С. Лазарев // Россия молодая : передовые технологии – в промышленность : матер. III Всерос. молодежн. науч.-техн. конф. – Омск, 2010. – Кн. 2. – С. 17–22. 16. Бубнова, Т. А. Способ управления синхронно-синфазным электроприводом при изменении задающего сигнала / А. В. Бубнов, Т. А. Бубнова, А. Н. Алпысова // Совершенствование электромеханических преобразователей энергии : Межвуз. тематический сб. науч. тр. – Омск : ОмГУПС, 2010. – С. 30–34. 17. Бубнова, Т. А. Сравнительный анализ способов фазирования синхронно-синфазного электропривода по быстродействию / А. В. Бубнов, Т. А. 16 Бубнова, М. В. Гокова // Омский регион – месторождение возможностей : матер. II Регион. науч.-техн. конф. – Омск: ОмГТУ, 2011. – Кн. 1. – С. 257–259. 18. Бубнова, Т. А. Исследование влияния уровня токоограничения на динамику электропривода с фазовой синхронизацией / Бубнов А. В., Бубнова Т. А., Чудинов А. Н. // Омский регион – месторождение возможностей : матер. II Регион. науч.-техн. конф. – Омск: ОмГТУ, 2011. – Кн. 1. – С. 259–261. 19. Бубнова, Т. А. Импульсный частотно-фазовый дискриминатор для ЭПФС / А. В. Бубнов, Т. А. Бубнова, В. Л. Федоров, А. Н. Алпысова // Омский регион – месторождение возможностей : матер. II Регион. науч.-техн. конф. – Омск: ОмГТУ, 2011. – Кн. 1. – С. 262–264. 20. Бубнова, Т. А. Системы прецизионного электропривода : учебное пособие / А. В. Бубнов, Т. А. Бубнова, В. Л. Федоров. – Омск : ОмГТУ, 2008. – 92 с. 21. Бубнова, Т. А. Электронный учебник по дисциплине «Электрический привод» / Т. А. Бубнова, В. Л. Федоров. – М. : ГКЦИТ ОФАП, 2008. – № 50200801025. 22. Бубнова, Т. А. Исследование влияния уровня токоограничения на динамику электропривода с фазовой синхронизацией / А. В. Бубнов, Т. А. Бубнова, А. Н. Чудинов // Энергетика и энергосбережение : межвуз. тематический сб. науч. тр. – Омск : ОмГТУ, 2011. – С. 81–87. 23. Бубнова, Т. А. Сравнение способов фазирования синхронно-синфазного электропривода по быстродействию / А. В. Бубнов, Т. А. Бубнова, М. В. Гокова // Энергетика и энергосбережение : межвуз. тематический сб. науч. тр. – Омск : ОмГТУ, 2011. – С. 226–234. Личный вклад. В работах, опубликованных в соавторстве, лично соискателю принадлежит в: [1], [7], [12], [16] – способ регулирования ССЭ при ступенчатом изменении сигнала задания; [2], [14], [17], [23] – способ фазирования с пошаговым доворотом вала электродвигателя; [3] – анализ влияния структуры регулятора на динамику электропривода; [4] – структура многофункционального преобразователя; [5], [11] – сравнительный анализ способов регулирования следящего ССЭ; [6], [8] – алгоритм работы ЛУС с расширенными функциональными возможностями; [9], [19] – схема демодуляции выходного ШИМ-сигнала ИЧФД; [10], [20], [21] – классификация способов управления ЭПФС; [13], [15] – сравнительный анализ алгоритмов работы ЛУС; [18], [22] – исследование динамики электропривода с учетом токоограничения электродвигателя;. 17