Лекция 11. Энергетические методы определения перемещений
реклама

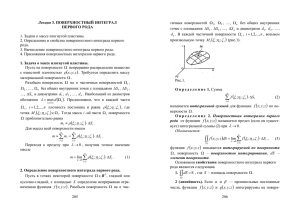
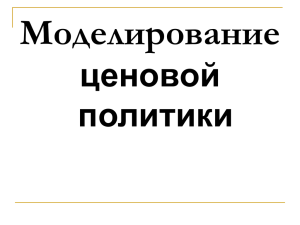
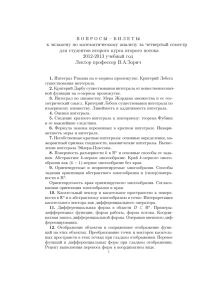
Лекция 11. Энергетические методы определения перемещений Работа внешних сил Растяжение-сжатие L PX dL 1 APX PX L 2 Кручение φ MX L 1 AM X M X 2 Работа внешних сил при изгибе δ 1 APY PY 2 L PY θ L MZ 1 AM Z M X 2 Обобщенная работа внешних сил Формулы можно обобщить APОБ 1 PОБ ОБ 2 где РОБ – обобщенная сила, т.е. любое силовое воздействие, любой силовой фактор; δОБ - обобщенное перемещение, т.е. тот вид перемещения, на котором РОБ совершает работу. Каждый из шести известных силовых факторов совершает работу на своем перемещении Потенциальная энергия деформации при растяжении стержня PX PX dx NX NX NX dU dx 1 dU N X x 2 N X dx x EF δx δx 2 NX x dx UNX 2 EF L Потенциальная энергия деформации при кручении вала MK MK dx MX dx MX dφ dU δφ 1 dU M X 2 M dx X GI p 2 MX x dx UMX 2GI p L Потенциальная энергия деформации при чистом изгибе балки MZ MZ dx dφ MZ MZ MZ dx 1 dU M Z 2 M Z dx M Z2 x dx UMZ 2 EI Z L dU EI Z M Y2 x dx U MY 2 EI Y L dφ Потенциальная энергия бруса при сложном нагружении Каждому силовому фактору соответствуют перемещения, на которых остальные силовые факторы не совершают работу. Поэтому потенциальная энергия деформации при сложном нагружении равна сумме потенциальных энергий шести отдельных факторов. Пренебрегая энергией деформации, связанной с поперечными силами, получаем для полной энергии деформации U U N X U M X U MY U M Z , 2 2 NX x dx MX x dx M Y2 x dx M Z2 x dx U . 2 EF 2 GI 2 EI 2 EI p Y Z L L L L Теорема Кастилиано P1 P2 dPn Pn Vn U1 dVn U2 P1 P2 Pn U U 2 U1 dPn Pn dPn Vn U1 U2 dVn 1 U 2 dPn dVn U1 dPnVn 2 Теорема Кастилиано (продолжение) U 1 U1 dPn dPn dVn U1 dPnVn . Pn 2 1 Пренебрегая членом второго порядка малости dPn dVn 2 , получаем аналитическую формулировку теоремы Кастилиано U Vn Pn или U VОБ PОБ Частная производная от потенциальной энергии системы по силе равна перемещению точки приложения силы вдоль направления действия этой силы. Пример применения теоремы Кастилиано M x O A L Требуется найти угол поворота сечения θA и прогиб конца балки δA . M Z2 x dx 1 M 2 L MZ (x) = M = const U 2 EI Z 2 EI Z L U ML А M EI Z Но как найти прогиб конца балки δA ? Пример применения теоремы Кастилиано (метод фиктивной силы) M PФ x O A L M Z M PФ x U L M PФ x 2 dx 1 M 2 L MPФ L2 PФ2 L3 2 EI Z 2 EI Z 2 EI Z 6 EI Z U ML2 А PФ PФ 0 2 EI Z Отмерим, что можно дифференцировать и под знаком интеграла. Интеграл Мора Ф А N NФ NX X X ; NФ X N X 1Ф ; M MФ MX X X; MФ X M X 1Ф ; M Z M Z M ZФ ; M ZФ M Z 1Ф , M Y M Y M YФ ; M YФ M Y 1Ф ; где NX1 , МX1 , МY1 и МZ1 - внутренние силовые факторы от безразмерной единичной силы Ф = 1. Интеграл Мора (продолжение) U L L N X M Y N1 X Ф 2 dx M X M X 1Ф 2 dx ... 2 EF 2GI p L M 1Y Ф 2 dx M Z M Z 1Ф 2 dx 2 EI Y 2 EI Z L N X N1 X dx M X M 1 X dx U А ... 2GI p Ф Ф 0 L 2 EF L M Y M 1Y dx M Z M 1Z dx 2 EI Y 2 EI Z L L Применение интеграла Мора Задача. Найти угол поворота сечения в точке А и прогиб в точке В М1 R1 q M2 P R2 А В 0 a a 3a x a 1 m E 5 2 10 MPa P 100kN q 100kN m M1 100kN m M2 2 M1 1 Применение интеграла Мора (продолжение 1) Найдем опорные реакции Given R2 M1 q 2 a 4 a R1 R2 P q 2 a 0 R1 R1 4 a P 3 a M2 0 Find ( R1 R2 ) R1 350 kN R2 50 kN Применение интеграла Мора (продолжение 2) Запишем функцию изгибающих моментов от внешних сил 2 M z( x) M1 x q if 0 x a 2 M1 x q 2 M1 q 2 a ( x Изгибающий момент, кН.м 2 R1 ( x a) a ) if a x 2 a R1 ( x P ( x a) 2 a ) if 2 a x 5 a Эпюра изгибающих моментов 200 200 M z( x) kN m 0 150 200 0 0 1 2 3 x m Координат а сечения, м 4 5 5 Применение интеграла Мора (продолжение 3) Найдем угол поворота сечения в точке А, приложив в этой точке единичный изгибающий момент Rm1 Rm2 1 B 0 х А a a 3a Определим опорные реакции Íàéäåì îïîðíûå ðåàêöèè Given Rm1 Rm2 0 Rm1 4 a Rm1 Rm2 1 0 Find ( Rm1 Rm2 ) Rm1 0.25 1 m Rm2 0.25 1 m Применение интеграла Мора (продолжение 4) И зги б а б щ и й м о м е н т Запишем функцию изгибающих моментов и построим соответствующую эпюру 1 Mm z( x ) Эпюра изгибающи х моментов 1 0.5 0 0 0 1 2 0 3 4 x 5 m Координата сечения, м Угол поворота сечения в точке А равен 5 a A M z( x) Mm z( x) E I 0 z dx 5 A 0.273 deg Применение интеграла Мора (продолжение 5) Найдем прогиб в точке В, приложив в этой точке единичную силу Rp1 Rp2 1 0 А B a a 3a Определим опорные реакции Given Rp1 Rp2 Rp14 a Rp1 Rp2 1 0 1 3 a 0 Find( Rp1 Rp2) Rp1 0.75 Rp2 0.25 х Применение интеграла Мора (продолжение 6) Запишем функцию изгибающих моментов и построим соответствующую эпюру 0 if 0 x a Rp1 ( x a ) if a x 2 a Rp1 ( x a ) 1 ( x 2 a ) if 2 a x 5 a И зги б а ю щ и й мо ме н т , м Mp z( x) 0.75 Эпюра изгибающих моментов 1 Mp z( x ) m 0.5 0 0 0 1 2 0 3 x 4 5 5 m Координата сечения, м Прогиб в точке В равен 5 a B M z( x) Mp z( x) E I 0 z dx B 1.992 mm