ЕН.Р.1 Исследование операций (новое окно)
реклама
")
1
АННОТАЦИЯ
«Исследование операций» является учебной дисциплиной регионального
компонента цикла общих математических и естественнонаучных дисциплин.
УМК по дисциплине «Исследование операций» предназначен студентам,
обучающихся по специальности 080502.65 «Экономика и управление на
предприятии (по отраслям)» высшего профессионального образования очной и
заочной форм обучения. Включает в себя рабочую учебную программу,
краткий конспект лекций, контрольно-измерительные материалы, список
литературы. Также в комплекс помещены задания для практических работ,
материалы для самостоятельной работы студентов.
Задача курса – обучить студентов основам количественного анализа
ситуаций в экономике, приёмам исследования экономических объектов путём
построения и анализа экономико-математических моделей.
Основной целью изучения дисциплины «Исследование операций» является
формирование у будущих специалистов в области экономики и управления
теоретических знаний и практических навыков для решения прикладных
экономических задач с целью принятия управленческих решений средствами
количественного анализа и экономико-математического моделирования.
2
СОДЕРЖАНИЕ
РАБОЧАЯ УЧЕБНАЯ ПРОГРАММА ______ Error! Bookmark not defined.
КОНСПЕКТЫ ЛЕКЦИЙ ________________________________________ 16
МАТЕРИАЛЫ ПРАКТИЧЕСКИХ ЗАНЯТИЙ ______________________ 170
МАТЕРИАЛЫ ДЛЯ ОРГАНИЗАЦИИ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
СТУДЕНТОВ _______________________________________________ 215
КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ МАТЕРИАЛЫ ________________ 232
СПИСОК ЛИТЕРАТУРЫ _______________________________________ 250
3
4
5
Аннотация
Исследование операций в экономике объединяет совокупность методов и
моделей, позволяющих на базе экономической теории, экономической
статистики и математического инструментария принимать обоснованные
управленческие решения.
При изучении дисциплины «Исследование операций» предполагается, что
студент владеет основами матричной алгебры, математического анализа,
теории вероятностей, экономической теории, экономики и статистики в объёме,
предусмотренным Государственным образовательным стандартом.
Задача курса – обучить студентов основам количественного анализа
ситуаций в экономике, приёмам исследования экономических объектов путём
построения и анализа экономико-математических моделей.
Конечной целью изучения дисциплины «Исследование операций»
является формирование у будущих специалистов в области экономики и
управления теоретических знаний и практических навыков для решения
прикладных экономических задач с целью принятия управленческих решений
средствами
количественного
анализа
и
экономико-математического
моделирования.
1 Цели и задачи дисциплины
Основная часть теоретического материала, перечисленного в программе,
излагается на лекциях. Главной задачей практических занятий является
формирование и развитие умений и навыков, необходимых для практического
применения математического аппарата.
Конечные цели преподавания дисциплины:
овладение методологией математического моделирования, построения и
применения математических моделей в задачах исследования операций;
освоение математических методов получения оптимальных решений;
углубление теоретических знаний о проблемах разработки и выбора решений
по организации и управлению целенаправленными процессами (операциями).
В ходе изучения дисциплины ставятся следующие задачи:
6
научить студентов использовать в своей практической деятельности
современные методы исследования операций;
привить студентам умение и навыки самостоятельно изучать литературу
по исследованию операций и математическим методам принятия оптимальных
решений.
2 Требования к результатам освоения дисциплины
В результате изучения дисциплины обучающийся должен знать:
основные принципы и этапы построения математических моделей;
изучаемые математические модели и методы получения оптимальных
решений.
Уметь:
провести формализацию и математическое моделирование типовой
задачи исследования операций;
решать конкретные практические задачи исследования операций, в том
числе на ПЭВМ с использованием прикладных программ;
анализировать итоги исследования и предлагать решения, опираясь на
результаты, полученные путем математического моделирования.
Владеть:
современной
терминологией,
понятиями,
определениями
и
классификацией методов исследования операций;
средствами Microsoft Excel для реализации математических методов
принятия оптимальных решений
3 Начальные требования к освоению дисциплины
Дисциплина
«Исследование
операций»
относится
к
дисциплинам
регионального компонента цикла естественнонаучных дисциплин. Ее изучение
базируется на сумме знаний и фактических навыках, полученных студентами в
ходе изучения таких дисциплин, как «Математика», «Экономическая теория»,
«Статистика», и других.
7
4 Объем дисциплины и виды учебной работы
Всего
часов
Виды учебной работы
Общая трудоёмкость дисциплины
Распределение
по курсам
75
Лекции
Практические занятия
Всего самостоятельная работа
в том числе:
контрольная работа (заочная форма обучения)
20 / 6
18 / 2
10 / 67
2/5
18 (1 работа)
Вид итогового контроля
экзамен
27 / -
5 Тематическое планирование изучения содержания дисциплины
Кол-во часов
Темы программы
Лц
Пз
СРС
Тема 1. Линейное программирование: методы и
приложения
2 / 0,5
Тема 2. Математическая модель задачи математического
программирования
2 / 0,5
2 / 0,5
1/4
Тема 3. Графический метод решения задач линейного
программирования
2 / 0,5
2 / 0,5
1/4
Тема 4. Симплексный метод решения задач линейного
программирования
2 / 0,5
2/-
1/4
Тема 5. Теория двойственности
1 / 0,5
2/-
1/2
Тема 6. Транспортная задача линейного
программирования
2 / 0,5
2 / 0,5
1/3
Тема 7. Метод потенциалов
1 / 0,5
2/-
1/2
Тема 8. Транспортная задача с ограничением на
пропускную способность
2 / 0,5
Тема 9. Транспортная задача по критерию времени
2 / 0,5
2 / 0,5
1/4
Тема 10. Метод Гомори решения задач целочисленного
программирования.
1 / 0,5
2/-
1/6
Тема 11. Нелинейное программирование
1 / 0,5
2/-
1/6
Тема 12. Применение ЭВМ при решении ЗЛП
2 / 0,5
1/2
1/6
1/4
Конт рольная работа
18
Всего
8
20 / 6
18 / 2
10 / 67
6 Содержание учебной дисциплины
Тема 1. Линейное программирование: методы и приложения. Понятие
модели.
Классификация
экономико-математических
моделей.
Оптимизационные модели. Примеры содержательных постановок задач
линейного
программирования.
Транспортная
задача
линейного
программирования.
Тема
2.
Математическая
модель
задачи
математического
программирования. Общие понятия. Примеры составления математических
моделей
экономических
задач.
Приведение
общей
задачи
линейного
общей
задачи
линейного
программирования к канонической форме.
Практическая
работа
№1.
Приведение
программирования к канонической форме.
Тема
3.
Графический
программирования.
метод
Графический
решения
метод
решения
задач
задач
линейного
линейного
программирования с двумя переменными Графический метод решения задач
линейного программирования с n переменными.
Практическая работа №2. Решение задач линейного программирования
графическим методом.
Тема
4.
Симплексный
программирования.
метод
решения
задач
линейного
Общие понятия. Опорное решение задачи линейного
программирования. Алгоритм симплексного метода. Метод искусственного
базиса.
Практическая работа №3. Решение задач линейного программирования
симплексным методом.
Тема 5. Теория двойственности. Составление математических моделей
двойственных задач. Первая теорема двойственности. Вторая теорема
двойственности. Двойственный симплексный метод (метод последовательного
уточнения оценок).
Практическая
работа
№4.
Составление
математических
моделей
двойственных задач.
Тема
6.
Транспортная
задача
линейного
программирования.
Математическая модель транспортной задачи. Опорное решение транспортной
9
задачи. Метод минимальной стоимости. Переход от одного опорного решения к
другому.
Практическая
работа
№5.
Транспортная
задача
линейного
программирования.
Тема 7. Метод потенциалов. Общие понятия. Алгоритм решения
транспортных задач методом потенциалов.
Практическая работа №6. Решение транспортных задач методом потенциалов.
Тема 8. Транспортная задача с ограничением на пропускную
способность.
Транспортная
задача
с
ограничением
на
пропускную
способность.
Тема 9. Транспортная задача по критерию времени. Транспортная
задача по критерию времени.
Практическая работа №7. Решение транспортных задач с ограничением на
пропускную способность и по критерию времени.
Тема
10.
Метод
программирования.
Гомори
Метод
решения
Гомори.
Метод
задач
целочисленного
Гомори
решения
задач
целочисленного программирования.
Практическая работа №8. Решение задач методом Гомори.
Тема 11. Нелинейное программирование.
Цели.
Модели.
Примеры.
Модели
управления
запасами.
Детерминированные модели: Простейшая модель оптимального размера заказа.
Модель оптимального размера заказа с фиксированным временем его
выполнения. Модель оптимального размера заказа с производством. Модель
оптимального размера заказа с дефицитом. Модель оптимального размера
заказа с количественными скидками. Стохастическая модель. Дискретная
стохастическая модель оптимизации начального запаса. Примеры. Модели
систем массового обслуживания. Цели. Модели.
Практическая работа №9. Решение задач нелинейного программирования.
Тема 12. Применение ЭВМ при решении ЗЛП. Применение ЭВМ при
решении ЗЛП. (Решение ЗЛП через "Поиск Решения"). Имитационная игра
"Моделирование
экономики
и
менеджмента".
"Моделирование экономики и менеджмента".
10
Имитационная
игра
7 Содержание практических занятий
Практическая
работа
№1.
Приведение
общей
задачи
линейного
программирования к канонической форме.
Практическая работа №2. Решение задач линейного программирования
графическим методом.
Практическая работа №3. Решение задач линейного программирования
симплексным методом.
Практическая
работа
№4.
Составление
математических
моделей
двойственных задач.
Практическая
работа
№5.
Транспортная
задача
линейного
программирования.
Практическая работа №6. Решение транспортных задач методом потенциалов.
Практическая работа №7. Решение транспортных задач с ограничением на
пропускную способность и по критерию времени.
Практическая работа №8. Решение задач методом Гомори.
Практическая работа №9. Решение задач нелинейного программирования.
8 Учебно-методическое обеспечение дисциплины
Основная литература
1. Исследование операций в экономике : учебное пособие / под ред.
Н.
Ш. Кремера. – М. : ЮНИТИ, 2008.
2. Красс М. С. Математические методы и модели для магистров
экономики : учебное пособие / М. С. Красс, Б. П. Чупрынов. – СПб. : Питер,
2008.
3. Мельников В. П. Исследование систем управления : учебник для студ.
высш. учеб. заведений / В. П. Мельников. – М. : Академия, 2008.
4. Мишин В. М. Исследование систем управления : учебник для вузов / В.
М. Мишин. – 2-е изд., стереотип. – М. : ЮНИТИ-ДАНА, 2008.
5. Пантелеев А. В. Теория управления в примерах и задачах : учебное
пособие / А. В. Пантелеев, А. Бортаковский. – М. : Высш. шк., 2009.
6. Ползунова Н. Н. Исследование систем управления : учебное пособие
для вузов / Н. Н. Ползунова, В. Н. Краев. – М. : Академический Проект, 2008.
11
Дополнительная
1. Бережная Е. В. Математические методы моделирования экономических
систем / Е. В. Бережная, В. И. Бережной. – М. : Финансы и статистика, 2006.
2. Вентцель Е. С. Исследование операций / Е. С. Вентцель. – М. : Высшая
школа, 2001.
3. Гарнаев А. Ю. Использование MS Excel и YBA в экономике и
финансах / А. Ю. Гарнаев. – СПб. : BHV-Санкт-Петербург, 2000.
4. Емельянов А. А. Имитационное моделирование экономических
процессов : учеб. пособие / А. А. Емельянов. – М. : Финансы и статистика,
2006.
5. Карманов В. Г. Математическое программирование / В. Г. Карманов. –
М. : Наука, 2002.
6. Красс М. С. Математические методы и модели для магистрантов
экономики : учебное пособие / М. С. Красс, Б. П. Чупрынов. – СПб. : Питер,
2006.
7. Красс М. С. Основы математики и ее приложения в экономическом
образовании / М. С. Красс, Б. П. Чупрынов. – М. : Дело, 2003.
8. Плис А. И. Mahcad. Математический практикум для инженеров и
экономистов : учеб. пособие / А. И. Плис, Н. А. Сливина. – 2-е изд. перераб. и
доп. – М. : Финансы и статистика, 2003.
9. Салманов О. Н. Математическая экономика с применением Mahcad и
Excel / О. Н. Салманов. – СПб. : БХВ-Петербург, 2003.
Информационные ресурсы
1. Михайлова И. В. Исследование операций. Специальный курс : Ч. 1.
Математическая модель операции
[Электронный ресурс] : учебное пособие /
И. В. Михайлова. – Воронеж : Изд-во ВГУ, 2003. – Режим доступа :
http://window.edu.ru/resource/344/27344
2. Михайлова И. Н. Исследование операций : Ч. 2. Модели управления
запасами [Электронный ресурс] : учебно-методическое пособие / И. Н.
12
Михайлова, Л. Н. Баркова. – Воронеж : Изд-во ВГУ, 2005. – Режим доступа :
http://window.edu.ru/resource/603/59603
3. Пчельник В. К. Исследование операций [Электронный ресурс] :
методические рекомендации / В. К. Пчельник, И. Н. Ревчук. – Гродно
(Беларусь) : ГрГУ им. Я. Купалы, 2010. – Режим доступа :
http://window.edu.ru/resource/120/69120
9 Перечень вопросов для итогового контроля
1
Понятие модели. Виды и типы моделей.
2
Основная задача линейного программирования (ЛП). Приведение задачи
ЛП к каноническому виду.
3
Область допустимых решений задачи линейного программирования. Ее
геометрическая интерпретация.
4 Методы решения задач линейного программирования.
5 Графический метод решения задач линейного программирования с
двумя неизвестными.
6 Графический метод решения задач линейного программирования с n
неизвестными.
7 Симплексный метод решения задачи линейного программирования.
8 Метод искусственного базиса.
9 Основные правила составления математических моделей двойственных задач.
10 Первая и вторая теоремы двойственности.
11 Математическая модель транспортной задачи.
12 Математическая модель задач о рационе питания, об использовании ресурсов.
13 Опорное решение транспортной задачи. Методы построения начального
опорного решения.
14 Метод потенциалов. Алгоритм метода потенциалов.
15 Транспортная задача с ограничениями на пропускную способность.
16 Транспортная задача по критерию времени.
17 Виды и типы математических моделей.
18 Симплексный метод (алгоритм метода решения с помощью ЭВМ).
13
19 Экономическая интерпретация задач линейного программирования.
20 Решение оптимизационных задач с помощью пакета прикладных
программ Excel.
10 Материально-техническое обеспечение дисциплины
В
процессе
используются
преподавания
как
классические
дисциплины
формы
и
«Исследование
методы
обучения
операций»
(лекции,
практические занятия), так и активные методы обучения, применяются ITобучающие технологии.
При проведении лекционных занятий по дисциплине «Исследование
операций» используются аудиовизуальные, компьютерные и мультимедийные
средства обучения, а также демонстрационные и наглядно-иллюстрационные (в
том числе раздаточные) материалы.
11 Рейтинговая оценка по дисциплине
Изучение дисциплины «Исследование операций» рассчитано на один год
(курс). Итоговым контролем является экзамен.
Для оценки полученных знаний по дисциплине используется балльнорейтинговая система. Каждый вид работы студента оценивается определенным
количеством баллов.
2 балла за каждую посещенную лекцию (при пропуске по уважительной
причине – только после предъявления конспекта).
В процессе изучения дисциплины студент должен выполнить:
контрольную работу, за которую студент может получить до 50 баллов,
сданную в срок и защищенную в устной беседе (до 10 баллов за каждое задание);
электронные тесты (15 тестов + 1 итоговый) до 10 баллов за каждый тест
+ до 30 баллов за итоговый.
Общее максимальное количество баллов, которое может быть набрано
студентом, при своевременном и качественном выполнении всего перечня
заданий может составить: 290.
Если набрано > 280 балла – студент получает «отлично» без сдачи экзамена.
Если набрано > 270 балла – студент получает «хорошо» без сдачи экзамена.
14
Если набрано > 220 баллов – студент имеет допуск к экзамену, где во время
ответа может «добрать» необходимое для получения желаемой итоговой
оценки количество баллов.
Перевод суммарного рейтингового балла
Минимальный балл
Максимальный балл
Результат
Допуск к экзамену
220
235
274
удовлетворительно
275
286
хорошо
287
320
отлично
Максимально возможная рейтинговая оценка по видам деятельности
Вид занятия или деятельности
Количество
занятий, работ
Посещаемость занятий
18
Практические занятия
Тест
Контрольная работа
9
15 + 1 итоговый
1
Экзамен
3 вопроса
15
Оценка за
один вид
работы
(баллы)
2
3
10 + 30
50
Всего за курс
10
Итого
Максимально
возможный
суммарный балл
36
24
180
50
290
30
320
Министерство образования и науки Российской Федерации
ДАЛЬНЕГОРСКИЙ ИНДУСТРИАЛЬНОЭКОНОМИЧЕСКИЙ ИНСТИТУТ
(филиал) государственного образовательного
учреждения высшего профессионального
образования «Дальневосточный
государственный технический университет
(ДВПИ имени В.В.Куйбышева)»
КОНСПЕКТЫ ЛЕКЦИЙ
Исследование операций
080502. 65 Экономика и управление на предприятии (по отраслям)
(очная / заочная форма обучения)
г. Дальнегорск
2010
16
1 ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ: МЕТОДЫ И ПРИЛОЖЕНИЯ
1.1 Понятие Модели
Если между двумя объектами может быть установлено какое-либо
сходство, то один из этих объектов может рассматриваться как оригинал, а
другой – как модель. Отношения «оригинал – модель» могут иметь место и
между различным числом объектов.
Таким образом, модель – это условный образ объекта (в качестве которого
могут выступать системы или понятия), формирующий представление о нем в
некоторой форме, отличной от реального существования данного объекта.
Модель какого-либо объекта отображает его основные характеристические
свойства в некоторой абстрактной форме.
Люди на протяжении всей своей практической деятельности использовали
различные виды моделей, начиная от наскальной живописи и сооружения
деревянных идолов до составления сложных математических моделей,
описывающих динамику развития сложных физических процессов. Прогресс и
история науки и техники нашли свое наиболее точное выражение в
способности человека создавать модели естественных явлений, понятий и
объектов. Практически все авторы, пишущие о науке, утверждают, что одним
из основных инструментариев, используемых для решения наиболее сложных
задач, является построение и соответствующее использование модели. Процесс
познания окружающего мира в значительной степени основан на создании
моделей, построенных по сходству и аналогии с изучаемыми объектами.
Необходимо отметить, что аналогия и сходство могут быть чисто внешними, а
могут относиться к внутренней структуре совсем не похожих внешне объектов.
Модели могут принимать различные формы, но наиболее полезной и
общеупотребительной из них является математическая форма.
Цели моделирования разнообразны, основными из них являются:
познание объекта или системы;
прогнозирование поведения объекта;
17
принятие наилучших решений для достижения объектом поставленной
перед ним цели.
Построение
модели
любого
объекта
или
явления
предполагает
абстрагирование от многих реальных свойств объекта, акцентирование
внимания
на
его
основных
свойствах,
исходя
из
основных
целей
моделирования. Таким образом, любая модель абстрактна и, следовательно,
неполна, так как, выделяя основные свойства, определяющие те или иные
закономерности поведения объекта, она абстрагируется от других свойств,
которые, несмотря на свою относительную малость, могут определить не
только отклонения в поведении объекта, но и изменить тенденцию поведения.
Обычно полагают, что все свойства, явно не учтенные в модели, оказывают на
объект относительно малое результирующее воздействие. Р. Шеннон пишет:
«Опасность, которая подстерегает нас в моделировании, заключается в том, что
модель имеет тенденцию обрастать деталями и элементами, которые порой
ничего не вносят в понимание задачи, поэтому почти всегда намечается
тенденция имитировать избыточное число деталей. Закон Парето гласит, что в
каждой группе или совокупности существует жизненно важное меньшинство и
тривиальное большинство. Ничего действительно важного не происходит до
тех пор, пока не затронуто жизненно важное меньшинство». Поэтому модель
должна отражать только те аспекты объекта или системы, которые
соответствуют цели исследования.
Математическая
модель
экономического
объекта
–
это
его
гомоморфное отображение в виде совокупности уравнений, неравенств,
логических отношений.
Гомоморфизм – понятие математики и логики, обозначающее такое
соотношение между двумя системами, при котором:
каждому
элементу
и
каждому
отношению
между
элементами соответствует один элемент и одно отношение между
элементами другой системы;
18
при выполнении некоторого отношения между элементами первой
системы
выполняется
соответствующее
отношение
между
соответствующими элементами второй системы.
Принято говорить, что вторая система (как совокупность элементов и
отношений) представляет собой гомоморфный образ (модель) первой системы,
называемой
оригиналом.
Реальная
система
может
иметь
различные
гомоморфные ей модели. Понятие гомоморфизма является фундаментальным
теоретическим обоснованием моделирования, в том числе и экономикоматематического.
Для
построения
экономико-математической
модели
используется
следующий алгоритм:
1) формируются предмет и цели исследования;
2) в рассматриваемой экономической системе выделяются определенные
элементы, соответствующие данной цели исследования, и наиболее важные
характеристики этих элементов;
3) словесно описываются взаимосвязи между элементами модели;
4) вводятся символические обозначения для учитываемых характеристик
экономического объекта и устанавливаются, насколько возможно, взаимосвязи
между ними. Тем самым формируется математическая модель;
5) по данной модели проводятся расчеты и анализ полученного решения.
1.2. Классификация экономико-математических моделей
Можно выделить следующие основные классы экономико-математических
моделей:
1. Макроэкономические модели рассматривают экономику как единое
целое, связывая между собой укрупненные материальные и финансовые
показатели: ВНП, потребление, инвестиции, занятость и т.д. Эти модели,
абстрагируясь от поведения отдельных экономических элементов (таких, как
домашние хозяйства и фирмы), а также от различий между отдельными
19
рынками,
используются
для
анализа
и
прогнозирования
целостной
экономической системы.
2. Микроэкономические
модели
описывают
поведение
основных
элементов (структурных и функциональных составляющих) экономической
системы и различных форм взаимодействия этих элементов при заданных
условиях (уровень рыночной ставки %, инфляция, безработица и т.д.). Эти
условия, в свою очередь, оказывают серьезное влияние на поведение основных
элементов
системы.
Наиболее
серьезные
теоретические
результаты
в
микроэкономическом моделировании были получены при изучении олигополии
с использованием аппарата теории игр.
3. Равновесные модели описывают такие состояния экономики, когда
результирующая всех сил, стремящаяся вывести ее из данного состояния, равна
нулю.
4. Оптимизационные модели присутствуют в основном на микроуровне.
Для этих моделей характерно наличие одного или нескольких критериев и
системных ограничений.
5. Статические модели описывают некоторый объект в определенный
(фиксированный) момент времени.
6. Динамические модели включают взаимосвязи переменных во времени.
Динамические модели обычно используют аппарат теории дифференциальных
игр и разностных уравнений.
7. Детерминированные модели предполагают жесткие функциональные
связи между переменными моделями.
8. Стохастические модели допускают наличие случайных воздействий на
исследуемые показатели и используют инструментарий теории вероятностей и
математической статистики.
9. Эконометрические модели строятся на основе изучения и анализа
эмпирических данных.
Одними
из
наиболее
распространенных
моделей
являются
оптимизационные, которые, как правило, используются на микроуровне (т.е.
20
данные задачи используются чаще всего субъектами рынка: фирмами,
корпорациями и т.д.).
1.3 Оптимизационные модели
Отличительными признаками оптимизационных моделей являются:
· наличие одного или нескольких критериев оптимальности (критерий
оптимальности – это признак, по которому множество или одно решение задачи
признается наилучшим); наиболее типичными критериями в экономических
оптимизационных задачах являются: максимум дохода или прибыли, минимум
издержек, минимальное время для выполнения задания и другие;
· система ограничений, которая формируется, исходя из содержательной
постановки задачи, и представляет собой систему уравнений или неравенств.
Математически эти задачи относятся к задачам на условный экстремум.
Постановка таких задач, представленных в общем виде, выглядит следующим
образом:
· найти условный максимум (или минимум) функции:
Y = f (x1, x2, …, xn) -> max (min);
(1)
· при условии, что независимые переменные удовлетворяют ограничениям:
G (x1, x2, …, xn) = 0.
(2)
Эта задача является задачей на условный локальный максимум или минимум.
Термин «условный» появляется в данном случае в связи с тем, что независимые
переменные удовлетворяют условию – системе ограничений (2). Обычно
вместо двух терминов «максимум и минимум» используют один – экстремум. В
задаче на условный экстремум функцию Y = f (x1, x2, …, xn) называют целевой,
так как ее максимизация или минимизация часто есть формальное выражение
какой-либо цели (например, максимизация объема производства продукции при
фиксированных затратах).
Функцию G называют функцией, задающей ограничения.
Если в задаче на условный экстремум ограничения в виде системы
уравнений G (x1, x2, …, xn) = 0 заменить на ограничения в виде системы
неравенств
и
добавить
требования
21
(ограничения)
неотрицательности
переменных x1 ≥ 0, х2 ≥ 0, ... , xn ≥ 0, то получим задачу математического
программирования, в которой необходимо:
· найти экстремум функции
f (x1, x2, …, xn) -> max (min);
(3)
· при условии, что независимые переменные удовлетворяют системам
ограничений
g1(x1, x2, …, xn) ≤ 0,
(4)
gm(x1, x2, …, xn) ≤ 0,
x1 ≥ 0, х2 ≥ 0, ... , xn ≥ 0.
(5)
В задаче математического программирования функцию f (x1, x2, …, xn)
также называют целевой функцией; систему неравенств (4) – специальными
ограничениями задачи математического программирования, а неравенства (5) –
общими ограничениями задачи линейного программирования.
Задача линейного программирования – частный случай задачи
математического программирования, в которой целевая функция и
ограничения являются линейными.
Именно
этот
класс
оптимизационных
моделей
наиболее
широко
применяется в экономике. Разработаны специальные пакеты программ
линейного программирования для решения этого класса задач.
1.4. Примеры содержательных постановок задач линейного
программирования
Задача об оптимальном использовании ресурсов
Для изготовления двух видов продукции используются четыре вида
ресурсов: В1, В2, В3, В4. Имеющиеся запасы ресурсов различных видов, а также
затраты на изготовление единицы каждого из двух видов продукции приведены
в табл. 1.4.1.
22
Таблица 1.4.1
Задача об оптимальном использовании ресурсов
Число единиц ресурсов,
Вид ресурса
Запас ресурса
затрачиваемых на изготовление единицы продукции
Первый
Второй
вид продукции
вид продукции
В1
18
1
3
В2
16
2
1
В3
5
–
1
В4
21
3
–
На производство единицы продукции I-го и II-го видов используется
различное количество ресурсов. Так, например, на производство единицы
продукции I-го вида используется только одна единица ресурса В1, а на
производство
единицы
продукцииII-го
вида
используются
3
единицы
ресурса В1 на производство единицы продукции I-го вида используются 2
единицы ресурса В2, а на производство единицы продукции II-го вида
используется 1 единица ресурса В2, в то же время на производство продукции Iго вида ресурс В3 вообще не используется, а на производство продукции II-го
вида не используется ресурс В4.
Выручка, получаемая предприятием от продажи единицы продукции первого
и второго видов, составляет соответственно 2 руб. и 3 руб.
Необходимо составить такой план производства продукции первого и
второго видов, при котором выручка предприятия от ее реализации будет
максимальной.
Составим экономико-математическую модель задачи.
Пусть x1 – число единиц продукции первого вида, которое запланировано к
производству;
x2 – число единиц продукции второго вида, которое запланировано к
производству.
На их изготовление предприятию потребуется:
23
x1 + 3 х2 единиц ресурса В1;
2x1 + х2 единиц ресурса В2;
х2 единиц ресурса В3;
3x1 единиц ресурса В4.
Так как потребление ресурсов не должно превышать их запасов, то связь
между потреблением ресурсов и их запасами выразится системой ограничений:
x1 + 3 х2 ≤ 18,
2x1 + х2 ≤ 16,
(6)
x1 ≥ 0, x2 ≥ 0,
(7)
х2 ≤ 5,
3x1 ≤ 21.
По смыслу задачи:
Так как количество выпускаемой продукции как первого, так и второго
вида не может быть отрицательным.
Выручка от реализации продукции первого вида составит 2x1, а от
реализации продукции второго вида – 3 х2, таким образом, суммарная выручка
от реализации обоих видов продукции составит:
F = 2x1 + 3x2 -> max
(8)
Требуется найти такой план выпуска продукции X = (х1, х2), который
удовлетворял бы ограничениям (6) и (7) и при котором целевая функция F (8)
принимала бы максимальное значение.
Эту задачу легко обобщить на n видов продукции и m видов ресурсов.
Обозначим через:
xj – число единиц j-го вида продукции (j = 1, ... , n), запланированной к
производству;
bi – запас i-го ресурса (i =1, ..., т);
aij – число единиц ресурса i, затрачиваемого на изготовление единицы
продукции j-го вида (aij часто называют технологическими коэффициентами);
cj – выручка от реализации единицы продукции j-го вида (или цена
продукции j-го вида) (j = 1, ..., n).
24
Тогда экономико-математическая модель задачи об использовании
ресурсов в общей постановке примет вид: найти такой план
Х = (х1, х2,
..., хn) выпуска продукции, который удовлетворял бы системе ограничений:
и при котором целевая функция достигала бы своего максимального
значения:
1.5 Транспортная задача линейного программирования
Пусть
имеется
несколько
пунктов
отправления,
в
которых
сосредоточены запасы какого-либо однородного товара в определенных
количествах, несколько пунктов назначения, которые хотят получить этот товар
в определенных количествах. Известно, что сумма заявок на получение груза из
всех пунктов назначения равна сумме запасов товара, находящегося во всех
пунктах отправления. Известна стоимость перевозки единицы товара от
каждого пункта отправления до каждого пункта назначения.
Требуется составить такой план перевозок, в котором:
· все грузы из всех пунктов отправления были бы вывезены;
· заявки всех пунктов назначения были бы удовлетворены;
· суммарные затраты на перевозку были бы минимальны. Рассмотрим
конкретный пример.
Пусть имеется:
25
· три пункта отправления: города под названием А1, А2, А3, в которых
сосредоточены запасы какого-либо товара (например, машин) соответственно в
количестве а1 = 10, а2 = 20, а3 = 30;
· три пункта назначения: города под названием B1, B2, B3, в которых
сосредоточены потребители товара (машин), желающие получить его в
количестве b1 = 10, b2 = 10, b3 = 40;
· установлено, что сумма заявок всех городов-потребителей товара равна
суммарному количеству товара, имеющегося в городах – поставщиках этого
товара, т.е.:
известна стоимость перевозки одной единицы товара (одной машины) из
пункта отправления Ai в пункт назначения Bj, т.е. задана матрица стоимостей
перевозок:
Требуется составить такой план перевозок, при котором весь имеющийся
запас товара из всех городов-поставщиков, являющихся пунктами отправления,
был вывезен, все заявки городов-потребителей удовлетворены, а стоимость
перевозок всего товара, который перевозится от поставщиков к потребителям,
была бы минимальна. Вся вышеперечисленная информация представлена в
табл. 1.4.2.
26
Таблица 1.4.2
Транспортная задача
10
20
50
а1 = 10
A1
40
60
90
а2 = 20
A2
30
80
70
а3 = 30
A3
b1 = 10
b2 = 10
b3 = 40
60
B1
B2
B3
Перейдем к математической формулировке этой задачи. Обозначим
через хij – количество товара, который перевозится из пункта отправления Аi; в
пункт назначения Bj (1 ≤ i ≤ 3, 1 ≤ j ≤ 3).
Сформируем для рассматриваемой задачи систему ограничений.
Первое содержательное ограничение состоит в том, что сумма товаров,
содержащихся во всех пунктах отправления, должна равняться сумме заявок на
доставку этих товаров, которые подали все пункты назначения. Математически
это означает, что должно выполняться уравнение:
Второе содержательное ограничение в данной задаче – все товары,
имеющиеся в каждом из пунктов отправления, должны быть вывезены,
возможно, в различные пункты назначения. Математически это означает, что
должны выполняться следующие равенства:
Третье содержательное ограничение - суммарное количество товара,
доставляемого в каждый пункт назначения изо всех пунктов отправления,
27
должно быть равно заявке, поданной данным пунктом. Математически это
означает, что должны выполняться следующие неравенства:
Четвертое ограничение предполагает, что перевозимые товары не могут
принимать отрицательные значения, т.е. хij ≥ 0.
Цель задачи состоит в минимизации перевозок. Математически это
означает, что целевая функция
Таким образом, математически задача состоит в нахождении такого плана
перевозок Х = (х11, х12, ..., х33), который удовлетворял бы системе ограничений и
доставлял бы минимум целевой функции.
Отличительные
особенности
экономико-математической
модели
транспортной задачи:
система ограничений представляет собой систему уравнений;
в системе ограничений коэффициенты при переменных принимают
только два возможных значения: либо 0, либо 1;
каждая переменная входит в систему ограничений два раза.
Для математической формулировки транспортной задачи в общем виде
введем следующие обозначения:
т – количество пунктов отправления, в которых сосредоточены товары;
ai – количество товара, сосредоточенного в пункте отправления Аi, (z = 1,
..., т);
п – количество пунктов назначения, в которые должны быть перевезены
товары;
bj – количество товара, которое заявлено пунктом Bj (j = 1,... , и);
сij – стоимость перевозки единицы товара из пункта i в пункт j.
28
В этом случае система ограничений примет вид:
а линейная функция – критерий
В этой задаче необходимо найти такой вектор Х = (х11, х12, ..., хmn), который
удовлетворял бы построенной системе ограничений и доставлял бы минимум
целевой функции.
Важной особенностью данной постановки задачи является соблюдение
баланса между количеством товара, которое хотят приобрести по заявкам все
пункты назначения, и количеством груза, имеющегося во всех пунктах
отправления. Такие транспортные задачи называются закрытыми. При
несоблюдении этого условия транспортные задачи называются открытыми.
Будучи задачей линейного программирования, транспортная задача может
быть
решена
симплекс-методом.
Однако
в
силу
отмеченных
выше
особенностей для нахождения ее оптимального решения могут быть применены
и специальные методы решения (например, метод потенциалов).
2 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЗАДАЧИ МАТЕМАТИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
2.1 Общие понятия
Математической
моделью
экономической
задачи
называется
совокупность математических соотношений, описывающих рассматриваемый
экономический процесс.
29
Для составления математической модели необходимо:
1) выбрать переменные задачи;
2) составить систему ограничений;
3) задать целевую функцию.
Переменными задачи называются величины х1, х2, ..., хп, которые
полностью характеризуют экономический процесс. Их обычно записывают в
виде вектора X = (х1, х2, ..., хп).
Системой ограничений задачи называется совокупность уравнений и
неравенств, которым удовлетворяют переменные задачи и которые следуют из
ограниченности ресурсов или других экономических условий, например
условия положительности переменных. В общем случае они имеют вид
Целевой функцией называют функцию Z(X) = f(х1, х2, ..., хn) переменных
задачи, которая характеризует качество выполнения задачи и экстремум
которой требуется найти.
Общая задача математического программирования формулируется
следующим образом: найти переменные задачи x1, х2, ..., хп, которые
обеспечивают экстремум целевой функции
Z(X) = f(x1, x2, …, хn) -> max(min) (9)
и удовлетворяют системе ограничений
Если целевая функция (9) и система ограничений (10) линейны, то задача
математического
программирования
называется
задачей
линейного
программирования.
Допустимым решением (планом) задачи линейного программирования
называется любой n-мерный вектор X = (х1, х2, ...,хп), удовлетворяющий системе
30
ограничений и условиям неотрицательности. Множество допустимых решений
задачи образует область допустимых решений.
Оптимальным решением (планом) задачи линейного программирования
называется такое допустимое решение (план) задачи, при котором целевая
функция достигает экстремума.
2.2 Примеры составления математических моделей экономических задач
1.
(задача использования ресурсов).
При производстве п видов продукции используется т видов ресурсов.
Известно:
b1, b2, ...,bт – запасы ресурсов;
aij (i = 1, 2, ..., т; j = 1, 2, ..., п) – расход каждого i-гo вида ресурса на
изготовление единицы j-й продукции
с;(j = 1, 2, ..., п) – прибыль, получаемая при реализации единицы j-й
продукции.
Составить план выпуска продукции, обеспечивающий максимальную
прибыль.
Решение:
Обозначим вектор переменных задачи:
X = (х1, х2, ..., хп), где xj (j = 1,2, ..., п) – объем выпуска j-й продукции.
Учитывая, что CjXj– прибыль от реализации всего объема j-й продукции, aijxj –
затраты i-го вида ресурса на весь объем выпуска j-ой продукции, запишем
математическую модель задачи.
Кроме того, необходимо учитывать неотрицательность переменных
задачи, так как объем выпуска продукции не может быть отрицательным.
Таким образом, математическая модель имеет вид:
31
2.
(задача о составлении рациона питания).
Животные
должны
получать
ежедневно т питательных
веществ
в
количестве не менее b1, b2, ..., bт. В рацион животных входят корма п видов.
Известно:
aij (i = 1, 2, ..., т; j = 1, 2, ..., п) – содержание i-гo питательного вещества в
единице j-го вида корма;
Cj (j = 1, 2, ..., n) – стоимость единицы j-го вида корма. Составить
суточный рацион кормления животных, обеспечивающий минимальные
затраты.
Решение:
Введем переменные задачи:
X = (х1, х2, ..., хп), где xj (j = 1,2, ..., п) – объем j-го вида корма, входящего в
суточный рацион. Так как aijхj, — количество i-го питательного вещества,
содержащегося в ум виде корма, входящего в суточный рацион, сjхj – стоимость
j-го корма, то математическая модель имеет вид:
32
Составить математические модели следующих задач:
1. При производстве двух видов продукции используются три вида сырья.
Составить план выпуска продукции, обеспечивающий максимум прибыли.
Исходные данные таковы:
а
а)
Запасы
сырья
Расход сырья на
б)
Запасы
единицу продукции
№1
№2
30
1
3
48
4
60
Прибыль
сырья
Расход сырья на
единицу продукции
№1
№2
20
2
1
3
12
1
1
3
3
30
1
3
70
60
Прибыль
40
50
2. В рационе животных используется два вида кормов. Животные должны
получать три вида веществ. Составить рацион кормления, обеспечивающий
минимальные затраты. Исходные данные таковы:
33
а)
Содержание
Необходимое
питательного
количество
питательного
вещества
б)
количество
вещества
питательного
в единице корма
№1
№2
15
5
1
12
2
7
Стоимость
единицы
корма
Необходимое
вещества
Содержание
питательного
вещества
в единице корма
№1
№2
12
2
1
1
10
1
1
1
1
24
2
3
40
30
Стоимость
единицы
корма
60
60
2.3 Приведение общей задачи линейного программирования к
канонической форме
Каноническая задача линейного программирования имеет вид:
Она отличается от других задач тем, что ее система ограничений является
системой уравнений и все переменные неотрицательные. При необходимости
перехода от неравенства к уравнению вводят дополнительные переменные.
Неравенство ai1x1 + ai2x2 + ... + ainxn ≤ bi заменяется уравнением ai1x1 + ai2x2 + ...
+ ainxn + xn+1 = bi и условием неотрицательности дополнительной переменной
хп+1 ≥ 0, а неравенство ai1x1 + ai2x2 + ... + ainxn ≥ bv – уравнением aai1x1 + ai2x2 + ...
+ ainxn – xn+1 = bi и условием неотрицательности хn+1 ≥ 0. Дополнительные
переменные вводят в целевую функцию с коэффициентом, равным нулю.
34
Любая переменная хj, на которую не наложено условие неотрицательности,
заменяется разностью двух других неотрицательных переменных
В канонической задаче целевая функция может, как минимизироваться, так
и максимизироваться. Для того чтобы перейти от нахождения максимума к
нахождению
минимума
или
наоборот,
достаточно
изменить
знаки
коэффициентов целевой функции. Полученная в результате этого задача и
исходная задача имеют одно и то же оптимальное решение, а значения целевых
функций на этом решении отличаются только знаком.
При решении некоторых задач возникает необходимость перехода от
канонической задачи к симметричной, которая в матричной записи имеет вид:
Z(X) = CX ->max,
AX ≤ A0, X ≥ 0.
или
Z(X) = CX ->min,
AX ≤ A0, X ≥ 0.
где С = (с1, с2, …, сn),
35
5. Привести к каноническому виду задачу линейного программирования
Решение:
Перейдем к задаче на отыскание максимума целевой функции. Для этого
изменим знаки коэффициентов целевой функции. В целях превращения в
уравнения второго и третьего неравенств системы ограничений введем
неотрицательные
дополнительные
переменные х4, х5 (на
математической
модели эта операция отмечена буквой Д). Переменная x4 вводится в левую
часть второго неравенства со знаком «+», так как неравенство имеет вид « ≤ ».
Переменная хь вводится в левую часть третьего неравенства со знаком «–», так
как неравенство имеет вид «>». В целевую функцию переменные х4, х5 вводятся
с коэффициентом, равным нулю. Переменную х1, на которую не наложено
условие неотрицательности, заменяем разностью
.
Записываем задачу в каноническом виде:
36
6. Привести к симметричному виду задачу линейного программирования
Решение:
Методом Жордана-Гаусса приведем систему уравнений-ограни-чений
задачи к равносильной разрешенной. Одновременно разрешенные неизвестные
исключим из целевой функции. Для этого в таблице решения задачи (табл. 6.1)
наряду с коэффициентами уравнений системы ограничений в дополнительной
строке запишем коэффициенты целевой функции. В последнем столбце
дополнительной строки (на месте правой части уравнения) запишем свободный
член целевой функции, равный нулю. При вычислениях учитываем, что
разрешающий элемент в последней строке (в целевой функции) выбирать нельзя.
Преобразование Жордано-Гаусса
Таблица 6.1
37
Число -9, полученное в последнем столбце последней строки таблицы,
необходимо записать в целевую функцию с противоположным знаком. В
результате данных преобразований задача принимает следующий вид:
Так как переменные х2, х3 неотрицательные, отбросив их, можно записать
задачу в симметричном виде
7. Привести к каноническому виду:
38
9. Привести к симметричной форме записи:
10.
11.
39
12.
3 ГРАФИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧ ЛИНЕЙНОГО
ПРОГРАММИРОВАНИЯ
3.1 Графический метод решения задач линейного программирования с
двумя переменными
Графический метод используется для решения задач с двумя переменными
следующего вида:
40
Данный метод основывается на возможности графического изображения
области допустимых решений задачи и нахождении среди них оптимального
решения.
Область допустимых решений задачи строится как пересечение (общая
часть) областей решений каждого из заданных ограничений (12), (13).
Областью решений линейного неравенства ai1x1 + ai2x2 < bi является одна из
двух полуплоскостей, на которые прямая ai1x1 + ai2x2 = 0, соответствующая
данному неравенству, делит всю координатную плоскость.
Для того чтобы определить, какая из двух координатных полуплоскостей
является областью решений, достаточно координаты какой-либо точки, не
лежащей на прямой, подставить в неравенство: если оно удовлетворяется, то
областью решений является полуплоскость, содержащая данную точку, если же
неравенство не удовлетворяется, то областью решений является полуплоскость,
не содержащая данную точку.
Областью
допустимых
решений
задачи
является
общая
часть
полуплоскостей – областей решений всех неравенств системы ограничений.
Для нахождения среди допустимых решений оптимального решения
используют линии уровня и опорные прямые.
Линией уровня называется прямая, на которой целевая функция задачи
принимает постоянное значение. Уравнение линии уровня в общем случае
имеет вид с1х1 + с2х2 = l, где l = const. Все линии уровня параллельны между
собой. Их нормаль п – (c1, с2).
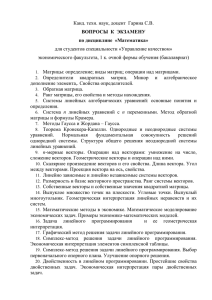
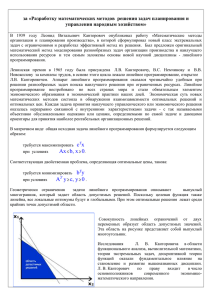
Опорной прямой называется линия уровня, которая имеет хотя бы одну
общую точку с областью допустимых решений и по отношению к которой эта
область находится в одной из полуплоскостей.
Область допустимых решений любой задачи имеет не более двух опорных
прямых, на одной из которых может находиться оптимальное решение (рис. 1).
41
Рис. 1
Значения целевой функции на линиях уровня возрастают, если линии
уровня перемещать в направлении их нормали, и убывают при перемещении
линий уровня в противоположном направлении.
Алгоритм
графического
метода
решения
задач
линейного
программирования с двумя переменными:
1. Построить область допустимых решений.
2. Если область допустимых решений является пустым множеством, то
задача не имеет решения ввиду несовместности системы ограничений.
3. Ели область допустимых решений является непустым множеством,
построить нормаль линий уровня п = (c1,c2) и одну из линий уровня, имеющую
общие точки с этой областью.
4. Линию уровня переместить до опорной прямой в задаче на максимум в
направлении нормали, в задаче на минимум – в противоположном направлении.
5. Если при перемещении линии уровня по области допустимых решений в
направлении, соответствующем приближению к экстремуму целевой функции,
линия уровня уходит в бесконечность, то задача не имеет решения ввиду
неограниченности целевой функции.
6. Если задача линейного программирования имеет оптимальное решение,
то для его нахождения решить совместно уравнения прямых, ограничивающих
область допустимых решений и имеющих общие точки с соответствующей
опорной прямой. Если целевая функция задачи достигает экстремума в двух
42
угловых
точках,
то
задача
имеет
бесконечное
множество
решений.
Оптимальным решением является любая выпуклая линейная комбинация этих
точек. После нахождения оптимальных решений вычислить значение целевой
функции на этих решениях.
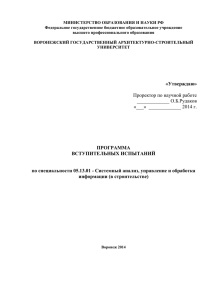
1. Решить задачу линейного программирования
Решение:
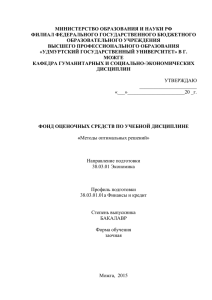
Строим область допустимых решений задачи. Нумеруем ограничения
задачи. В прямоугольной декартовой системе координат (рис. 2) строим
прямую х1 – х2 + 2 = 0 (L1), соответствующую ограничению (1). Находим, какая
из двух полуплоскостей, на которые эта прямая делит всю координатную
плоскость, является областью решений неравенства (1). Для этого достаточно
координаты какой-либо точки, не лежащей на прямой, подставить в
неравенство. Так как прямая L1 не проходит через начало координат,
подставляем координаты точки О (0, 0) в первое ограничение 1*0-1*0 + 2 ≥ 0.
Получаем строгое неравенство 2 ≥ 0. Следовательно, точка О лежит в
полуплоскости решений. Таким образом, стрелки на концах прямой L1 должны
быть направлены в полуплоскость, содержащую точку О. Аналогично строим
прямые Зх1 – 2х2 – 6 = 0 (L2), 2х1 + х2 – 2 = 0 (L3), х2 = 3 (L4) и области решений
ограничений (2), (3) и (4). Находим общую часть полуплоскостей решений, учитывая при этом условия неотрицательности; полученную область допустимых
решений отметим на рис. 2 штриховкой.
43
Рис. 2
Строим нормаль линий уровня п = (3, 2) и одну из этих линий,
например 3х1 + 2х2 = 0. Так как решается задача на отыскание максимума
целевой функции, то линию уровня перемещаем в направлении нормали до
опорной прямой. Эта прямая проходит через точку X* пересечения прямых,
ограничивающих
область
допустимых
решений
и
соответствующих
неравенствам (2) и (4). Определяем координаты точки X* = L2 ∩ L4. Решая
систему
Получаем X* = (4, 3). Вычисляем Z(X*) = 3 ∙ 4 + 2 ∙ 3 = 18.
О т в е т : max Z(X) = 18 при X* = (4, 3).
44
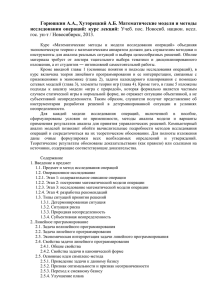
2. Решить задачу линейного программирования
Решение:
Строим область допустимых решений, нормаль линий уровня п = (4, 2) и
одну из линий уровня, имеющую общие точки с этой областью (рис. 3).
Перемещаем линию уровня в направлении, противоположном направлению
нормали п, так как решается задача на отыскание минимума функции. Нормаль
линий уровня п = (4, 2) и нормаль п2 = (2, 1) граничной прямой L2, в
направлении которой перемещаются линии уровня, параллельны, так как их
координаты пропорциональны (4:2 = 2:1). Следовательно, опорная прямая
совпадает с граничной прямой L2 области допустимых решений и проходит
через две угловые точки этой области X*1 и Х*2. Задача имеет бесконечное
множество оптимальных решений, являющихся точками отрезка [X*1, X*2]. Эти
точки X*2 = L1 ∩ L2, находим, решая соответствующие системы уравнений:
Вычисляем
45
Рис. 3
О т в е т : min Z(X) = 12 при X* = (1 – t) X*1 + tX*2 , 0 ≤ t ≤ 1.
46
3. Решить задачу линейного программирования
Решение:
Строим область допустимых решений, нормаль п = (3, 7) и одну из линий
уровня (рис. 4).
Рис. 4
В данной задаче необходимо найти максимум целевой функции, поэтому
линию уровня перемещаем в направлении нормали. Ввиду того что в этом
направлении область допустимых решений не ограничена, линия уровня уходит
в бесконечность. Задача не имеет решения вследствие неограниченности
целевой функции.
О т в е т : Z(X)-> ∞.
4. Решить задачу линейного программирования
47
Решение:
Строим
прямые
линии,
соответствующие
неравенствам
системы ограничений и находим полуплоскости, являющиеся областями
решений этих неравенств (рис. 5).
Рис. 5
Область допустимых решений задачи является пустым множеством.
Задача не имеет решения ввиду несовместности системы ограничений.
Ответ: система ограничений несовместна.
3.2 Графический метод решения задач линейного программирования
с n переменными
48
Графическим методом решаются задачи линейного программирования,
записанные в каноническом виде и удовлетворяющие условию п – r ≤ 2, где п –
число неизвестных системы ограничений; r – ранг системы векторов условий.
Если уравнения системы ограничений линейно независимы, то ранг r равен
числу уравнений системы т.
1. Решить задачу линейного программирования
Решение:
Метод применим, так как п – r = 5 – 3 = 2.
Методом Жордана-Гаусса приведем систему уравнений-ограничений
задачи к равносильной разрешенной (табл. 3). Одновременно исключим
разрешенные неизвестные из целевой функции.
Таблица 3
Используя последнюю часть табл. 3, запишем задачу линейного
программирования в преобразованном виде:
49
Отбросим в уравнениях-ограничениях неотрицательные разрешенные
неизвестные х1, х2, х3 и заменим знак равенства знаками неравенства «≤»,
получим вспомогательную задачу линейного программирования с двумя
переменными
Решаем задачу графическим методом (рис. 6). Свободный член в целевой
функции 22 на отыскание оптимального решения не влияет и учитывается
только при вычислении значения целевой функции.
Рис. 6
Находим оптимальное решение вспомогательной задачи
X* = L1 ∩ L2:
50
Вычисляем минимальное значение целевой функции
Z(X*) = -1 ∙ 6 + 4 ∙ 1 + 22 = 20.
Находим оптимальное решение исходной задачи. Для этого используем
систему ограничений в разрешенном виде:
Вычисляем :
Получаем Х*= (5, 0, 0, 6, 1).
О т в е т : Z(Х) = 20 при Х* = (5, 0, 0, 6, 1).
4 СИМПЛЕКСНЫЙ МЕТОД РЕШЕНИЯ ЗАДАЧ ЛИНЕЙНОГО
ПРОГРАММИРОВАНИЯ
4.1 Общие понятия
Симплексный метод основывается на следующем:
область допустимых решений задачи линейного программирования
является выпуклым множеством с конечным числом угловых точек, т.е.
многогранником или многоугольным множеством;
оптимальным решением задачи линейного программирования является
одна из угловых точек области допустимых решений;
51
угловые
точки
представляют
области
некоторые
допустимых
базисные
решений
(опорные)
алгебраически
решения
системы
ограничений задачи.
Данный метод состоит в целенаправленном переборе опорных решений
задачи линейного программирования. Он позволяет за конечное число шагов
расчета либо найти оптимальное решение, либо установить его отсутствие.
Основное содержание симплексного метода:
1) найти начальное опорное решение;
2) осуществить переход от одного опорного решения к другому, на
котором значение целевой функции ближе к оптимальному;
3) определить
критерии
завершения
процесса
решения
задачи,
позволяющие своевременно прекратить перебор решений на оптимальном
решении или сделать заключение об отсутствии решения.
4.2 Опорное решение задачи линейного программирования
Пусть имеется задача линейного программирования в канонической форме
Будем считать, что правые части всех уравнений системы ограничений
неотрицательны. Если в каком-либо уравнении правая часть отрицательна, то
это уравнение нужно умножить на -1.
Опорным решением задачи линейного программирования называется такое
допустимое решение X = (х10, х20, … , хт0, 0, ..., 0), для которого векторы
условий (столбцы коэффициентов при неизвестных в системе ограничений) A1,
А2, ...,Ат, соответствующие положительным координатам, линейно независимы.
52
Число отличных от нуля координат опорного решения не может быть
больше ранга r системы векторов условий
(числа линейно независимых
уравнений системы ограничений). В дальнейшем будем считать, что система
ограничений состоит из линейно независимых уравнений, т.е. r = т.
Если число отличных от нуля координат опорного решения равно т, то
решение
называется невырожденным, в
противном
случае
(меньше т) –
вырожденным.
Базисом опорного решения называется базис системы векторов условий
задачи, включающий в свой состав векторы, соответствующие отличным от
нуля координатам опорного решения.
Базисное решение находится методом Жордана-Гаусса. При этом
разрешающие элементы для преобразований Жордана необходимо выбирать из
условия, обеспечивающего неотрицательность правых частей уравнений
системы,
(17)
Здесь k – номер вектора условия Аk, вводимого в базис (номер выбираемого
столбца матрицы системы ограничений), а l –номер вектора Аl, выводимого из
базиса (номер строки матрицы системы, в которой следует выбирать
разрешающий элемент для преобразования Жордана).
С помощью данного условия можно выбрать разрешающий элемент в
любом столбце k матрицы системы ограничений, в котором имеется хотя бы
один положительный элемент. Если при выборе разрешающего элемента
данное условие нарушается, в правой части системы уравнений появляются
отрицательные величины.
Используя данное условие, можно получить допустимое базисное
решение, которое является начальным опорным решением.
Аналогичное условие используется при переходе от одного опорного
решения к другому.
53
Пример 1. Найти начальное опорное решение и путем перебора опорных
решений
определить
оптимальное
решение
задачи
линейного
программирования
Решение:
Результаты
нахождения
начального
опорного
решения
и
дальнейшего перебора опорных решений приведены в табл. 1. В правой части
таблицы на каждом шаге вычислений приведены значения параметра θк для
различных
шрифтом),
столбцов k (минимальные
соответствующее
опорное
значения θok выделены
жирным
решение Xi и
целевой
значение
функции Z(Xi) на этом решении. Номера столбцов для выбора разрешающих
элементов принимались произвольно.
Таблица 1
Сравниваем
значения
целевой
функции
на
полученных
опорных
решениях: min {-1, 5, 7, 7} = -1. Делаем вывод, что оптимальным решением
является X1 = (0, 0, 3,4).
О т в е т : min Z(X) = -1 при X* = (0, 0, 3, 4).
54
4.3 Алгоритм симплексного метода
Оптимальное решение задачи линейного программирования можно найти
путем перебора не всех, а только части опорных решений. Для этого
необходимо каждое опорное решение проверять на оптимальность и переход от
одного опорного решения к другому осуществлять таким образом, чтобы
значение целевой функции увеличивалось в задаче на максимум или
уменьшалось в задаче на минимум.
При переходе от одного опорного решения Х1 к другому Х2 приращение
целевой функции находится по формуле
(18)
т.е.
(19)
Здесь k – номер вектора, вводимого в базис опорного решения; Δk – оценка
разложения вектора условий Ak по базису опорного решения, вычисляемая по
формуле
(20)
или в векторной записи
(21)
где Сб = (сх, с2, ..., ст) – вектор коэффициентов целевой функции при
базисных переменных; Xk = (x1k, x2k, ..., xmk) – вектоp разложения вектора Ak по
базису
опорного
решения; ck – коэффициент
целевой
функции при
переменной xk.
Если в задаче линейного программирования на максимум (минимум) хотя
бы для одного вектора условий оценка разложения по базису невырожденного
опорного решения отрицательная (положительная), то опорное решение может
быть улучшено, т.е. можно найти новое опорное решение, на котором значение
целевой функции будет больше (меньше).
55
Чтобы обеспечить наибольшее изменение целевой функции при переходе
от одного опорного решения к другому, векторы, выводимый из базиса и
вводимый в базис опорного решения, необходимо выбирать, исходя из условий:
· в задаче на максимум
(22)
· в задаче на минимум
(23)
В упрощенном варианте вектор, вводимый в базис, можно выбрать, исходя
из условий:
· в задаче на максимум
(24)
· в задаче на минимум
(25)
Опорное решение задачи линейного программирования на максимум
(минимум) является оптимальным, если для любого вектора условий оценка
разложения по базису опорного решения неотрицательная (неположительная),
т.е.:
· в задаче на максимум
(26)
· в задаче на минимум
(27)
Оптимальное решение задачи линейного программирования является
единственным, если для любого вектора условий, не входящего в базис, оценка
отлична от нуля, т.е.
(28)
Здесь
предполагается,
что
в
базис
оптимального
решения
входят первые т векторов.
Задача
линейного
программирования
имеет
бесконечное
множество оптимальных решений, если при оптимальном решении оценка хотя
бы одного вектора условия, не входящего в базис, равна нулю, т.е.
(29)
56
Задача
линейного
программирования
не
имеет
решения
в
виду
неограниченности целевой функции, если для какого-либо из векторов
условий Ak с оценкой Δk, противоречащей признаку оптимальности, среди
коэффициентов разложения по базису опорного решения нет положительного,
т.е.:
· в задаче на максимум
(30)
· в задаче на минимум
(31)
Алгоритм решения задачи симплексным методом
1. Привести задачу линейного программирования к каноническому виду.
2. Найти начальное опорное решение с базисом из единичных векторов и
коэффициенты разложений векторов условий по базису опорного решения.
Если опорное решение отсутствует, задача не имеет решения ввиду
несовместности системы ограничений.
3. Вычислить оценки разложений векторов условий по базису опорного
решения и заполнить симплексную таблицу.
4. Если выполняется признак единственности оптимального решения, то
решение задачи заканчивается.
5. Если выполняется условие существования множества оптимальных
решений, то путем простого перебора найти все оптимальные решения.
6. Если имеют место условия неограниченности целевой функции, то
задача не имеет решения.
7. Если пункты 4-6 алгоритма не выполняются, найти новое опорное
решение и перейти к пункту 3.
Пример 2. Решить симплексным методом
57
Решение:
Приводим задачу к каноническому виду. Для этого в левую часть второго и
третьего
ограничений-неравенств
типа
«≤»
вводим
дополнительные
переменные х5 и х6 с коэффициентом +1. В целевую функцию х5 и х6 входят с
коэффициентом 0 (т.е. не входят). Получаем
Система
ограничений
этой
задачи
является
системой
уравнений,
разрешенной относительно переменных х4, х5, х6. Свободные (неразрешенные)
переменные приравниваем к нулю: х1 = х2 = х3 = 0. Получаем х4 = 6, х5 = х6 = 10.
Записываем базисное решениеХ1 = (0, 0, 0, 6, 10, 10), которое является начальным
опорным решением с базисом Б1 = (А4, А5, Л6).
По формуле (21) вычисляем оценки разложений векторов условий по
базису опорного решения:
−1
1
∆1 = Сб Х1 − с1 = ( 0 ) ∙ (1)-1=(-1)∙1+0∙1+0∙2-1=-2
0
2
−1
1
∆2 = Сб Х2 − с2 = ( 0 ) ∙ (2)-1=(-1)∙1+0∙2+0∙1-1=-2
0
1
58
−1
2
∆3 = Сб Х3 − с3 = ( 0 ) ∙ (1)-1=(-1)∙2+0∙1+0∙1-1=-3
0
1
Оценки для векторов, входящих в базис, всегда равны нулю.
Опорное решение, коэффициенты разложений и оценки разложений
векторов условий по базису опорного решения записываются в симплексную
таблицу (табл. 2).
Таблица 2
Для
удобства
вычислений
оценок
над
таблицей
записываются
коэффициенты целевой функции. В первом столбце «Б» записываются векторы,
входящие в базис опорного решения. Порядок записи этих векторов
соответствует номерам разрешенных неизвестных в уравнениях-ограничениях.
Во втором столбце таблицы «Сб» записываются коэффициенты целевой
функции при базисных переменных в том же порядке. При правильном
расположении коэффициентов целевой функции в столбце «С б» оценки
единичных векторов, входящих в базис, всегда равны нулю. В последней
строке таблицы с оценками Δk в столбце «А0» записывается значение целевой
функции на опорном решении Z(X1).
Начальное опорное решение не является оптимальным, так как в
рассматриваемой задаче на максимум векторам A1, A2 и А3 соответствуют
отрицательные оценки Δ1 = -2, Δ2 = -2, Δ3 = -3 (не выполняется признак
оптимальности).
В данном случае можно найти новое опорное решение, на котором
значение целевой функции будет больше. Определим, введение какого из трех
векторов приведет к большему приращению целевой функции. Приращение
целевой функции находится по формуле (30.5). Вычисляем значения параметра
59
θ0А для первого, второго и третьего векторов по формуле (30.4). Получаем θ01= 5
при l= 3;θ
02=
5 при l=2; θ03= 3 при l= 1 (см. табл. 2). Находим возможные
приращения целевой функции при введении в базис каждого из этих векторов и
определяем наибольшее из них:
Следовательно, для более быстрого приближения к оптимальному
решению необходимо ввести в базис опорного решения либо вектор A1, либо
вектор А2. Вводим в базис вектор А1. Так как минимальное значение θ01=5
достигается при l = 3, то исключаем из базиса третий вектор А6. За
разрешающий элемент принимаем число 2, расположенное в первом столбце и
третьей строке. Выполняем преобразование Жордана с элементом х31 = 2.
Получаем
второе
опорное
решение Х2 = (5,
0,
0,
1,
5,
0)
с
базисом Б2 = (А4,А5, А1), Z(X2) = 4 (табл.3).
Таблица 3
Это решение не является оптимальным, так как векторы А2 и А3 имеют
отрицательные оценки Δ2 = -1, Δ3 = -2. Определяем, введение какого из
векторов А2 или А3 в базис опорного решения приведет к большему приращению
целевой функции:
Вводим в базис вектор А2. Минимальное значение параметра θ02 = 2 имеет
место при l = 1, поэтому разрешающий элемент берем в первой строке. Из
базиса исключаем вектор А4. Выполняем преобразование Жордана с элементом х12
60
= 0,5. Получаем третье опорное решение Х3 = (4, 2, 0, 0, 2, 0) с базисом Б3 =
(А2, А5, A1), Z(X3) = 6 (табл. 4).
Опорное решение Х3 является оптимальным, так как для всех векторов
условий оценки в задаче на максимум неотрицательные. Однако данное
решение не единственное, так как вектор А6, не входящий в базис, имеет
нулевую оценку. Этот вектор нужно ввести в базис опорного решения, чтобы
получить еще одно оптимальное решение. Вектор, выводимый из базиса,
находим с помошью параметра θ6. Так как θ06 = min {2, 4} = 2 при l = 2,
разрешающий элемент для следующего преобразования Жордана берем во
второй строке. В базис входит вектор A6 вместо вектора А5. Получаем второе
оптимальное решение Х4 = (2, 4, 0, 0, 0, 2) с базисом Б4 = (А2, А6, А1), Z(X4) = 6
(табл. 5).
Таблица 5
Исходная задача имела четыре переменные, поэтому в ответе в
оптимальном решении последние две дополнительные переменные не
записываем.
О т в е т : max Z(X) = 6 при X* = (1-t)X*1 + tX*2, 0 ≤ t ≤1
61
Пример 3. Решить симплексным методом
Решение:
Приводим задачу к каноническому виду:
Используя метод Жордана-Гаусса, приведем систему ограничений задачи к
равносильной разрешенной системе уравнений (табл.5). При этом, используя
параметр θk, сохраним правые части уравнений неотрицательными. Получим
начальное опорное решение X1 = (0, 1, 1, 1, 0) с базисом Б1 = (А4, А2, А3). Затем
вычислим оценки разложений векторов условий по базису опорного решения
по формуле (20) и дополним таблицу расчета строкой оценок. Далее продолжим
расчет симплексным методом так же, как в предыдущей задаче.
Таблица 6
62
Начальное опорное решение X1 не является оптимальным, так как
векторам А1 и
А5 соответствуют
оптимальности
в
задаче
на
положительные
оценки.
минимум
оценки
все
По
признаку
должны
быть
неположительными. Определяем, введение какого из векторов (А1 или А5) в
базис приведет к большему уменьшению целевой функции:
В базис вводим вектор A1. Исключаем из базиса вектор А4, соответствующий
минимуму параметра θ01 = 1 при l= 1. Выполняем преобразование Жордана,
получаем
второе
опорное
решение Х2 =
(1,
3,
4,
0,
0)
с
базисом Б2 = (A1, А2, А3). Данное опорное решение является оптимальным,
потому что оценки для всех векторов условий неположительные. Оптимальное
решение единственное, так как векторы, не входящие в базис, не имеют
нулевых оценок.
О т в е т : min Z(X) = -16 при X* = (1, 3, 4).
63
4.4 Метод искусственного базиса
Данный
метод
применяется
для
решения
задач
линейного
программирования симплексным методом в случае, когда задача не имеет
начального опорного решения с базисом из единичных векторов.
Согласно данному методу для задачи линейного программирования
составляется
так
называемая
расширенная
задача,
которая
решается
симплексным методом. На основе результатов решения расширенной задачи
либо находится оптимальное решение исходной задачи, либо устанавливается
причина отсутствия ее решения.
Пусть имеется каноническая задача линейного программирования
Без
ограничения
общности
можно
считать,
что
правые
части
уравнений системы ограничений неотрицательные, т.е. bi > 0, i =1, 2, ..., т.
Для исходной
задачи
составляют
расширенную
задачу.
При
этом используют искусственные переменные.
Искусственными
переменными
называются
неотрицательные
переменные, которые вводятся в ограничения-равенства для получения
начального опорного решения с базисом из единичных векторов. Каждая
искусственная переменная вводится в левую часть одного из уравнений
системы ограничений с коэффициентом +1 и в целевую функцию в задаче на
максимум с коэффициентом -М, а в задаче на минимум с коэффициентом +М.
Число М сколь угодно большое по сравнению с единицей (М » 1).
В общем случае расширенная задача на максимум имеет вид
64
Если
расширенная
задача
линейного
программирования
имеет
оптимальное решение X* = (х*1, х*2, ..., х*n, 0, ..., 0), у которого все
искусственные переменные равны нулю, то исходная задача имеет оптимальное
решение X* = (х*1, х*2, ..., х*n), которое получается из X* отбрасыванием нулевых
искусственных переменных (признак оптимальности решения).
Если расширенная задача имеет оптимальное решение, у которого хотя бы
одна искусственная переменная отлична от нуля, то исходная задача не имеет
решения в виду несовместности системы ограничений (признак отсутствия
решения ввиду несовместности системы ограничений).
Если расширенная задача не имеет решения в виду неограниченности
целевой функции, то и исходная задача не имеет решения по той же причине
(признак отсутствия решения ввиду неограниченности целевой функции).
Метод искусственного базиса в основном совпадает с обычным
симплексным методом, но имеет некоторые особенности.
Особенности метода искусственного базиса:
1. Ввиду того что начальное опорное решение расширенной задачи
содержит
искусственные
переменные,
входящие
в
целевую
функцию с
коэффициентом –М (в задаче на максимум) или +М (в задаче на минимум),
оценки разложений векторов условий Δk =CбXk – ck состоят из двух слагаемых
Δ'к и Δ''к (М), одно из которых Δ'k не зависит от М, а другое Δ''k(М) зависит от М.
Так как М сколь угодно велико по сравнению с единицей (М» 1), то на первом
этапе расчета для нахождения векторов, вводимых в базис, используются
только слагаемые оценок Δ''k(М).
65
2. Соответствующие искусственным переменным векторы, выводимые из
базиса опорного решения, в дальнейшем исключаются из рассмотрения.
3. После того как все векторы, соответствующие искусственным
переменным,
исключаются
из
базиса,
расчет
продолжается
обычным
симплексным методом с использованием оценок Δ'k, не зависящих от М.
1.
Решить
методом
искусственного
базиса
задачу
линейного
программирования
Решение:
Составляем расширенную задачу. В левые части уравнений системы
ограничений
вводим
неотрицательные
искусственные
переменные
с
коэффициентом + 1 (всегда). Данная задача – задача на нахождение минимума,
поэтому x5 и x6 в целевую функцию вводятся с коэффициентом +М. Получаем
Приравниваем
свободные
переменные
системы
уравнений
(ограничений) к нулю: x1 = x2 = x3 = х4 = 0, получаем начальное опорное решение
расширенной задачи X1 = (0, 0, 0, 0, 3, 2) с базисом из единичных векторов Б1 =
(А5, А6). Вычисляем по формулам (30.8) оценки разложений векторов условий
по базису опорного решения и записываем в симплексную таблицу (табл. 7).
При этом оценки Δk и Z(X1) для удобства вычислений записываем в две строки:
в первую – слагаемые Δk, не зависящие от М, во вторую – слагаемые Δ''k(М),
66
зависящие от М. Значения Δ''k (М) удобно записывать без М, имея в виду,
однако, что оно там присутствует.
Таблица 7
Начальное опорное решение не является оптимальным, так как в задаче на
минимум
имеются
положительные
оценки.
Выбираем
номер
вектора Аk, вводимого в базис опорного решения, и вектора Аl, выводимого из
базиса. Для этого вычисляем приращения целевой функции ΔZk при введении в
базис каждого из векторов с положительной оценкой и находим минимум этого
приращения. При этом слагаемыми оценок Δ'к (без М) пренебрегаем до тех пор,
пока хотя бы одно слагаемое Δ''к(М) (с М) отлично от нуля. В связи с этим
строка со слагаемыми оценок Δ'к может отсутствовать в таблице до тех пор,
пока присутствует строка Δ''k(М). Находим
В столбце «А4» за разрешающий элемент выбираем коэффициент 2 в
первой строке и выполняем преобразование Жордана.
Вектор
А5,
выводимый
из
базиса,
исключаем
из
рассмотрения
(вычеркиваем). Получаем опорное решение Х2 = (0, 0, 0, 3/2, 0, 0.5) с
базисом Б2 = (А4,A6) (табл. 8).
Таблица 8
67
Данное решение не является оптимальным, так как векторы A1 и А3 имеют
положительные оценки Δ''1(М) = Δ''3(М)=1/2М. Введение в базис опорного
решения любого из этих векторов приведет к уменьшению целевой функции на
одну и ту же величинуΔZ1=ΔZ3= -1*(1/2)М = -М/2(слагаемыми без М
пренебрегаем). По своему усмотрению вводим в базис вектор A1, получаем
опорное решение Х3 = (1, 0, 0, 1, 0, 0) с базисом Б3 = (А4, A1) (табл. 9).
Таблица 9
Опорное решение Х3 не является оптимальным, так как вектор А2 имеет
положительную оценку. Вводим этот вектор в базис опорного решения. В
соответствующем столбце симплексной таблицы единственное положительное
число, а именно 1, принимаем за разрешающий элемент для перехода к новому
опорному решению. Получаем следующее опорное решение Х4 = (4, 1, 0, 0, 0,
0), которое является оптимальным решением расширенной задачи, так как
оценки для всех векторов неположительные (табл. 10).
68
Таблица 10
Исходная задача также имеет оптимальное решение, которое получается из
оптимального
решения
расширенной
задачи
отбрасыванием
нулевых
искусственных переменных, т.е. X* = (4, 1, 0, 0).
О т в е т : min Z(X) = 15 при X* = (4, 1, 0, 0).
2.
Решить
методом
искусственного
базиса
задачу
линейного
программирования
Решение:
Приводим
задачу
к
каноническому
виду.
Для
этого
вводим
дополнительные переменные x4, x5, x6:
Чтобы найти начальное опорное решение с базисом из единичных векторов,
вводим в первое уравнение-ограничение искусственную переменную, получаем
расширенную задачу
69
Данная расширенная задача имеет начальное опорное решение X1 = (0, 0, 0, 0,
6, 8, 2) с базисом из единичных векторов Б1 = (А7, А5, А6). Вычисляем оценки
векторов условий и записываем в симплексную таблицу (табл. 4.10). Это
решение
не
является
и
оптимальным,
так
как
оценки
отрицательные. Находим приращение целевой функции при
введении в базис опорного решения векторов A1 и А3.
Получаем Δ Z1 =
-1
∙
(-2М)
= 2М, ΔZ3 = -2 ∙ (-М) = 2М. По
своему
усмотрению вводим в базис вектор A1.
Таблица 11
Выполняем преобразование Жордана с разрешающим элементом х11 = 2,
получаем второе опорное решение Х2 = (1, 0, 0, 0, 7, 11, 0) с базисом из
единичных векторов Б2 = (А1 А5, А6). Данное решение не является оптимальным,
потому
что
оценка
для
вектора A4отрицательная:
. Однако
опорное решение нельзя улучшить, так как все коэффициенты разложения
70
вектора А4 по базису опорного решения отрицательные: xi4 < 0 (i = 1, 2, 3).
Таким
образом,
расширенная
задача
не
имеет
решения
в
виду
неограниченности целевой функции. Исходная задача также не имеет решения
в виду неограниченности целевой функции.
О т в е т : Z(X)-> +∞
5 ТЕОРИЯ ДВОЙСТВЕННОСТИ
5.1 Составление математических моделей двойственных задач
Любой задаче линейного программирования, называемой исходной или
прямой, можно поставить в соответствие другую задачу, которая называется
двойственной или сопряженной. Обе эти задачи образуют пару двойственных
(или сопряженных) задач. Каждая из задач является двойственной к другой
задаче рассматриваемой пары.
В теории двойственности используются четыре пары двойственных задач
(приведем их в матричной форме записи):
Исходная задача
Двойственная задача
С и м мет р и чн ые п а р ы
Z(X)
1 = CX → max,
F(Y) = YA0 → min,
AX ≤ A0,
YA ≥ C,
X ≥ 0;
Y ≥ 0.
Z(X)
2 = CX → min,
F(Y) = YA0 → max,
AX ≥ A0,
YA ≤ C,
X ≥ 0;
Y ≥ 0.
(5.1)
(5.2)
Н е с и ммет р и чн ы е п а р ы
Z(X)
3 = CX → max,
AX = A0,
F(Y) = YA0 → min,
YA ≥ C.
(5.3)
X ≥ 0;
Z(X)
4 = CX → min,
F(Y) = YA0 → max,
AX = A0,
YA ≤ C.
(5.4)
X ≥ 0;
71
Здесь С = (с1, с2, …, сn), Y = (у1, у2, …, уm),
Правила составления двойственных задач
1. Во
всех
ограничениях
исходной
задачи
свободные
члены
должны находиться в правой части, а члены с неизвестными – в левой.
2. Ограничения-неравенства исходной задачи должны быть записаны так,
чтобы знаки неравенств у них были направлены в одну сторону.
3. Если знаки неравенств в ограничениях исходной задачи «≤», то целевая
функция Z(X) = с0 + с1х1 + с2х2 + ... + спхп должна максимизироваться, а если
«≥», то минимизироваться.
4. Каждому ограничению исходной задачи соответствует неизвестное в
двойственной задаче; при этом неизвестное, отвечающее ограничениюнеравенству,
должно
удовлетворять
условию
неотрицательности,
а
неизвестное, отвечающее ограничению-равенству, может быть любого знака.
5. Целевая функция двойственной задачи имеет вид
где
с0
–
свободный
член
целевой
функции Z(X) исходной
задачи,b1 b2, ..., bm – свободные члены в ограничениях исходной задачи, при
этом bi – свободный член именно того ограничения исходной задачи, которому
соответствует неизвестная yi, a y1, у2, …, ут – неизвестные в двойственной
задаче.
6. Целевая функция F(Y) двойственной задачи должна оптимизироваться
противоположным по сравнению с Z(X) образом, т.е. если Z(X)
то F(Y)
min, и если Z(X)
min, то F(Y)
max,
max.
7. Каждому неизвестному xj, j = 1,2, ..., п исходной задачи соответствует
ограничение в двойственной задаче. Совокупность этихп ограничений (вместе с
72
условиями неотрицательности неизвестных yi, соответствующих ограничениямнеравенствам исходной задачи) образует систему ограничений двойственной
задачи. Все ограничения двойственной задачи имеют вид неравенств,
свободные
члены
которых
находятся
в
правых
частях,
а
члены
с
неизвестными y1, y2, ..., ут – в левых. Все знаки неравенств имеют вид «≥»,
если F(Y)
min, и «≤», если F(Y)
max.
Коэффициенты, с которыми неизвестные y1, y2, ..., ут входят в ограничение,
соответствующее неизвестному xj, совпадают с коэффициентами при этом
неизвестном xj в ограничениях исходной задачи, а именно: коэффициент
при yi совпадает
с
тем
коэффициентом
при xj, с
которым xj, входит
в
ограничение исходной задачи, соответствующее неизвестному yi.
5.1. Составить задачу, двойственную к данной
Решение:
Умножим первое ограничение-неравенство на -1. Задача примет вид
исходной задачи симметричной пары двойственных задач (5.2):
Умножим правые части ограничений на соответствующие переменные
двойственной задачи и сложим их, получим целевую функцию
73
Функция F(Y) максимизируется, так как целевая функция исходной задачи
минимизируется.
Умножим
коэффициенты
при х в
системе
ограничений
на
соответствующие переменные двойственной задачи и сложим их, получим 2y1 + 1 ∙ у2 + 1 ∙ у3 изданная сумма меньше или равна коэффициенту при х1 в
целевой функции – -2 y1 + у2 + у3 ≤ 5. Неравенство имеет вид « < », потому что
целевая
функция
двойственной
задачи
максимизируется.
Аналогично
составляются еще два ограничения двойственной задачи (соответствуют
переменным х2, х3):
Все
переменные
неотрицательности,
двойственной
потому
что
все
задачи
удовлетворяют
ограничения
исходной
неравенства. Окончательно двойственная задача имеет вид
5.2. Составить задачу, двойственную к данной
Решение:
74
условию
задачи
–
Данная задача имеет вид исходной задачи второй несимметричной пары
двойственных задач (5.4). Записываем двойственную задачу:
Переменные у1, у2 не должны удовлетворять условию неотрицательности,
так как они соответствуют ограничениям-равенствам исходной задачи.
5.3. Составить задачу, двойственную к данной
Решение:
Используем общие правила составления двойственных задач. Умножим
второе ограничение-неравенство на -1, так как в задаче на минимум
неравенства должны иметь вид «≥» (см. правило 3). Исходная задача примет
вид
75
Составляем двойственную задачу
Переменная y1, соответствующая ограничению-равенству, может быть
любого знака (см. правило 4).
5.2 Первая теорема двойственности
Теоремы двойственности позволяют установить взаимосвязь между
оптимальными решениями пары двойственных задач. Решив одну из пары
двойственных задач, можно или найти оптимальное решение другой задачи, не
решая ее, или установить его отсутствие. Возможны следующие случаи:
· обе задачи из пары двойственных имеют оптимальные решения;
· одна из задач не имеет решения ввиду неограниченности целевой
функции, а другая не имеет решения ввиду несовместности системы
ограничений.
Теорема
Если одна из пары двойственных задач имеет оптимальное решение, то и
двойственная к ней имеет оптимальное решение; причем значения целевых
функций задач на своих оптимальных решениях совпадают.
Если одна из пары двойственных задач не имеет решения ввиду
неограниченности целевой функции, то другая не имеет решения ввиду
несовместности системы ограничений.
5.4. Для данной задачи составить двойственную, решить ее симплексным
методом и, используя первую теорему двойственности, найти решение
исходной задачи:
76
Решение:
Используя вторую симметричную пару двойственных задач (31.2),
составляем задачу, двойственную к исходной:
Вводя неотрицательные дополнительные переменные у4, у5, у6, приводим
задачу к каноническому виду:
Находим начальное опорное решение У1 = (0, 0, 0, 2, 4, 6) с базисом из
единичных векторов Б1 = (А4, А5, А6). Решение задачи симплексным методом
приведено в табл. 31.1.
77
Таблица 31.1
Оптимальное решение двойственной задачи Y* = (0, 2, 2, 0, 0, 4), его
базис Б* = (А2, А3, А6), значение целевой функции
max F(Y) = F(Y*) = 14.
Оптимальное решение исходной задачи, двойственной к решенной, можно
найти по формуле
Х* = С*D-1.
Матрица D состоит из координат векторов А2, А3, А6, входящих в базис
оптимального решения двойственной задачи:
.
Матрица D-1 находится в последней симплексной таблице. Ее столбцы
располагаются под столбцами единичной матрицы, т.е. под единичными
векторами А4, А5, А6, образующими базис начального опорного решения:
.
78
Координатами вектора С* являются коэффициенты целевой функции при
базисных неизвестных оптимального решения у2, у3,у6. Данные коэффициенты
записываются в том же порядке, в каком векторы условий входят в базис
оптимального решения, т.е. С*= (5, 2, 0). Вычисляем
Оптимальное решение исходной задачи можно найти проще, по формуле
Для этого необходимо к оценкам разложений по базису оптимального
решения векторов А4, А5, А6, входящих в базис начального опорного решения,
т.е. к оценкам этих векторов в последней симплексной таблице, прибавить
соответствующие коэффициенты целевой функции (они расположены над
верхней строкой таблицы над соответствующими оценками)
О т в е т : min Z(X) = 14 при X* = (3, 2, 0).
5.3 Вторая теорема двойственности
Пусть имеется симметричная пара двойственных задач
Теорема
Для
того чтобы
допустимые
решения X =
(x1, x2,..., хn), Y =
(y1, y2, ..., ym) являлись оптимальными решениями пары двойственных задач,
необходимо и достаточно, чтобы выполнялись следующие равенства:
79
Иначе,
если
при
подстановке
ограничений i-e ограничение
оптимального
исходной
задачи
решения
выполняется
в
систему
как
строгое
неравенство, то i-я координата оптимального решения двойственной задачи
равна
нулю,
и,
наоборот,
если i-я координата
оптимального
решения
двойственной задачи отлична от нуля, то i-e ограничение исходной задачи
удовлетворяется оптимальным решением как равенство.
5.5. Для данной задачи составить двойственную, решить ее графическим
методом и, используя вторую теорему двойственности, найти решение
исходной задачи:
Решение:
Составим двойственную задачу
80
Решим эту задачу графическим методом. На рис. 1 изображены область
допустимых решений задачи, нормаль п = (6, 30) линий уровня, линии уровня и
оптимальное решение задачи Y* = (2, 3).
Подставим оптимальное решение Y* = (2, 3) в систему ограничений.
Получим, что ограничения (1) и (4) выполняются как строгие неравенства:
Рис. 1
Согласно второй теореме двойственности соответствующие координаты
оптимального решения двойственной задачи, т.е. исходной задачи, равны
нулю: х*1 = х*4 = 0. Учитывая это, из системы ограничений исходной задачи
получим
О т в е т : min Z(X) = 102 при X* = (0, 1, 7, 0).
81
5.4 Двойственный симплексный метод (метод последовательного
уточнения оценок)
Двойственный симплексный метод, как и обычный симплексный метод,
позволяет в результате последовательного улучшения так называемых почти
допустимых опорных решений либо найти оптимальное решение, либо
установить его отсутствие.
Пусть имеется задача линейного программирования в канонической форме
Почти
допустимым
опорным
решением (ПДОР)
задачи
линейного
программирования называется такой m-мерный вектор X = (х1,х2, ..., хm, 0, …,
0) который удовлетворяет системе ограничений задачи, не удовлетворяет
условиям
неотрицательности
переменных
и
для
которого
векторы
условий A1, A2, …, Am, соответствующие отличным от нуля координатам,
линейно независимы.
В двойственном симплексном методе рассматриваются ПДОР, при
которых
оценки
Δk разложений
векторов
условий Ak по
базису
ПДОР
соответствуют признаку оптимальности, т.е.:
· в задаче на максимум Ak > 0 при любом k;
· в задаче на минимум Ak < 0 при любом k.
Почти допустимое опорное решение является оптимальным, если оно
является допустимым (признак оптимальности ПДОР).
Если в задаче линейного программирования на максимум (минимум) для
заданного ПДОР с неотрицательными (неположительными) оценками хотя бы
одна координата отрицательная хl0 < 0 и при этом среди коэффициентов xlj (j =
1, 2, ..., n) разложений векторов условий по базису данного решения существует
82
хотя бы один отрицательный xlk < 0, то решение может быть улучшено
(приближено к оптимальному), т.е. можно построить новое ПДОР, для которого
значение целевой функции будет меньше (больше), если из его базиса вывести
вектор Аl; и ввести вектор Ak, номер которого находится из условия
Если для ПДОР существует хотя бы одна отрицательная координата хl0 и
при этом не существует отрицательного коэффициента xlj, разложений векторов
условий Аj (j = 1, 2, ..., n), то задача не имеет решения ввиду несовместности
системы
ограничений
(признак
отсутствия
решения
задачи
ввиду
несовместности системы ограничений).
Алгоритм двойственного симплексного метода:
1. Привести задачу к каноническому виду.
2. Найти ПДОР с базисом из единичных векторов, вычислить оценки
векторов условий по базису этого решения и, если они согласуются с
признаком
оптимальности,
решить
задачу
двойственным
симплексным
методом.
3. Если ПДОР не имеет отрицательных координат, то оно является
допустимым и оптимальным. Решение задачи заканчивается.
4. Если ПДОР имеет отрицательную координату хl0 < 0, для которой
соответствующие
коэффициенты
разложений
всех
векторов
условий
неотрицательные (хlj > 0 для любого j), то задача не имеет решения ввиду
несовместности системы ограничений. Решение задачи прекращается.
5. Если имеется хотя бы одна отрицательная координата ПДОР хl0 < 0 и
при этом найдется хотя бы один отрицательный коэффициент xlj разложений
векторов условий Аj по базису решения, перейти к новому решению, на
котором значение целевой функции будет ближе к оптимальному. Номер
вектора Ak, вводимого в базис, находится с использованием параметра θ0l; 5.4.
83
Номер вектора А1, выводимого из базиса, находится из условия
задаче на максимум или
в
в задаче на минимум.
Далее перейти к пункту 3 данного алгоритма.
5.6.
Решить
двойственным
симплексным
методом
Решение:
Приводим задачу к каноническому виду, для чего вводим в левые части
ограничений-неравенств
неотрицательные
дополнительные
переменные х4, х5, х6:
Для нахождения ПДОР с базисом из единичных векторов умножим каждое
из ограничений на -1, получим
84
Записываем начальное ПДОР: Х1 = (0, 0, 0, -5, -12, -15) с базисом Б1 =
(А4, А5, А6).
Вычисляем оценки Δj разложений векторов условий по базису ПДОР и
заполняем первую симплексную таблицу (табл. 31.2). Оценки для векторов
условий, не входящих в базис, отрицательные. Следовательно, условия
применимости двойственного симплексного метода к задаче на отыскание
минимума выполнены. Начальное ПДОР Х1 = (0, 0, 0, -5, -12, -15) не является
оптимальным,
так
как
не
удовлетворяет
условиям
неотрицательности
переменных задачи. Переходим к новому ПДОР с неположительными оценками
для векторов условий. Для того чтобы оценки остались неположительными,
необходимо номер kвектора Ak, вводимого в базис, выбрать из условия (31.10).
(В
таблицах
отношения |Δj / xlj|, соответствующие
минимуму
параметраθ0l, выделены жирным шрифтом.) При этом номер l вектора Аl,
выводимого
из
координате хl ПДОР.
базиса,
В
должен
данном
случае
соответствовать
отрицательными
отрицательной
являются
три
координаты: х4 = -5, х5 = -12, х6 = -15. Для соответствующих строк (1, 2 и 3-й)
симплексной таблицы находим
Отсюда следует, что оценки для векторов, не входящих в базис, останутся
отрицательными, если при выведении первого вектора базиса А4 ввести в базис
вектор А2 или при выведении второго или третьего векторов базиса (А5 или А6)
ввести вектор А1.
Таблица 5.2
85
Для обеспечения скорейшего достижения экстремума целевой функции
задачи на отыскание минимума номер I вектора, выводимого из базиса,
определяем из условия
где AZl есть приращение целевой функции при введении в базис ПДОР
вектора Аl. Вычисляем максимум:
Третий (l = 3) вектор базиса A6 заменяем вектором А1 (θ03 = 2 при j = 1).
Выполняем преобразование Жордана с разрешающим элементом а31 = -1 (см.
табл. 31.2). Получаем новое ПДОР Х2 = (15, 0, 0, -20, 33, 0) (табл. 31.3). Данное
решение Х2 не
является
оптимальным, так
как
координата
решения,
содержащаяся в первой строке симплексной таблицы, отрицательная: х4 = -20.
Находим
86
Выводим
из
базиса Б2 =
(А4, А5, А1) решения Х2 вектор А4, вводим
вектор А2, переходим к ПДОР Х3 = (10, 5, 0, 0, 23, 0), которое является
оптимальным, так как удовлетворяет условиям неотрицательности (табл. 31.4).
Таблица 5.4
О т в е т : min Z(X) - 95 при X* = (10, 5,0,0,23, 0).
6 ТРАНСПОРТНАЯ ЗАДАЧА ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
6.1 Математическая модель транспортной задачи
Однородный
груз
сосредоточен
у m поставщиков
в
объемах al, a2,..., ат. Данный груз необходимо доставить потребителям в
объемах b1, b2,..., bп. Известны cij (i = 1, 2, ..., m; у = 1, 2, ..., n) – стоимости
перевозки
единицы
груза
от
каждого i-ro поставщика
каждому j-му
потребителю. Требуется составить такой план перевозок, при котором запасы
всех
поставщиков
вывозятся
полностью,
запросы
всех
потребителей
удовлетворяются полностью и суммарные затраты на перевозку всех грузов
минимальны.
Исходные данные транспортной задачи записываются в таблице вида
87
Переменными (неизвестными) транспортной задачи являются xij (i = 1, 2,
..., m; j = 1, 2, ..., n) – объемы перевозок от каждого i-го поставщика каждому jму потребителю. Эти переменные могут быть записаны в виде матрицы
перевозок
.
Математическая модель транспортной задачи в общем случае имеет вид
Целевая функция задачи (41) выражает требование обеспечить минимум
суммарных затрат на перевозку всех грузов. Первая группа из m уравнений (42)
описывает тот факт, что запасы всех m поставщиков вывозятся полностью.
Вторая
группа
из nуравнений
(43)
выражает
требование
полностью
удовлетворить запросы всех n потребителей. Неравенства (44) являются
условиями неотрицательности всех переменных задачи.
88
Таким образом, математическая формулировка транспортной задачи
состоит в следующем: найти переменные задачи
удовлетворяющие
системе
ограничений
(42),
(43),
условиям
неотрицательности (44) и обеспечивающие минимум целевой функции (41). В
рассмотренной модели транспортной задачи предполагается, что суммарные
запасы поставщиков равны суммарным запросам потребителей, т.е.
. (45)
Такая задача называется задачей с правильным балансом, а ее модель –
закрытой. Если
же
это
равенство
не
выполняется,
то
задача
называется задачей с неправильным балансом, а ее модель – открытой.
Для того чтобы транспортная задача линейного программирования имела
решение, необходимо и достаточно, чтобы суммарные запасы поставщиков
равнялись суммарным запросам потребителей (см. равенство (45)), т.е. задача
должна быть с правильным балансом.
1. Составить математическую модель транспортной задачи, исходные
данные которой таковы:
Решение:
Введем переменные задачи (матрицу перевозок)
Запишем матрицу стоимостей
89
.
Целевая функция задачи равна сумме произведений всех соответствующих
элементов матриц С и X:
.
Данная функция, определяющая суммарные затраты на все перевозки,
должна достигать минимального значения.
Составим систему ограничений задачи. Сумма всех перевозок, стоящих в
первой строке матрицы X, должна равняться запасам первого поставщика, а
сумма перевозок во второй строке матрицы X – запасам второго поставщика:
Это означает, что запасы поставщиков вывозятся полностью.
Суммы перевозок, стоящих в каждом столбце матрицы X, должны быть
равны запросам соответствующих потребителей:
Это означает, что запросы потребителей удовлетворяютсяполностью.
Необходимо
также
учитывать,
что
перевозки
не
могут
быть
отрицательными: хij ≥ 0, i = l, 2, ..., т; j = 1, 2, ..., п.
О т в е т : математическая модель задачи формулируется следующим
образом: найти переменные задачи, обеспечивающие минимум функции
и удовлетворяющие системе ограничений
90
Для следующих транспортных задач составить математические модели:
6.2 Опорное решение транспортной задачи
Опорным решением транспортной задачи называется любое допустимое
решение, для которого векторы условий, соответствующие положительным
координатам, линейно независимы.
Ввиду того что ранг системы векторов условий транспортной задачи
равен N = m + n – 1, опорное решение не может иметь отличных от нуля
координат больше, чем N.
Для
проверки
линейной
независимости
векторов
условий, соответствующих координатам допустимого решения, используют
циклы.
Циклом называется
такая
последовательность
клеток
таблицы
транспортной задачи (i1, j1), (i1, j2), (i2, j2), …, (i1, j1). B которой две и только две
соседние клетки расположены в одной строке или столбце, причем первая и
последняя также находятся в одной строке или столбце.
Система векторов условий транспортной задачи линейно независима тогда
и только тогда, когда из соответствующих им клеток таблицы нельзя
образовать
ни
одного
цикла.
Следовательно,
91
допустимое
решение
транспортной задачи X = (хij), i = 1, 2, ...,т; j = 1, 2, ..., п является опорным
только в том случае, когда из занятых им клеток таблицы нельзя образовать ни
одного цикла.
Метод вычеркивания. Для проверки возможности образования цикла
используется так называемый метод вычеркивания, который состоит в
следующем.
Если в строке или столбце таблицы одна занятая клетка, то она не может
входить в какой-либо цикл, так как цикл имеет две и только две клетки в
каждой строке или в столбце. Следовательно, можно вычеркнуть все строки
таблицы, содержащие по одной занятой клетке, затем вычеркнуть все столбцы,
содержащие по одной занятой клетке, далее вернуться к строкам и продолжить
вычеркивание строк и столбцов. Если в результате вычеркиваний все строки и
столбцы будут вычеркнуты, значит, из занятых клеток таблицы нельзя
выделить часть, образующую цикл, и система соответствующих векторов
условий является линейно независимой, а решение – опорным. Если же после
вычеркиваний останется часть клеток, то эти клетки образуют цикл, система
соответствующих векторов условий линейно зависима, а решение не является
опорным.
Метод
северо-западного
угла.
Согласно
данному
методу
запасы
очередного поставщика используются для обеспечения запросов очередных
потребителей до тех пор, пока не будут исчерпаны полностью, после чего
используются запасы следующего по номеру поставщика.
Заполнение таблицы транспортной задачи начинается с левого верхнего
угла и состоит из ряда однотипных шагов. На каждом шаге, исходя из запасов
очередного поставщика и запросов очередного потребителя, заполняется только
одна клетка и соответственно исключается из рассмотрения один поставщик
или потребитель. При этом нулевые перевозки принято заносить в таблицу
только в том случае, когда они попадают в клетку (i, j), подлежащую
заполнению, т.е. в таблицу заносятся только базисные нули (0*), остальные
клетки с нулевыми перевозками остаются пустыми.
92
Во избежание ошибок после построения начального опорного решения
необходимо проверить, что число занятых клеток равнот + п – 1 и векторы
условий, соответствующие этим клеткам, линейно независимы.
Необходимо иметь в виду, что метод северо-западного угла не учитывает
стоимость перевозок, поэтому опорное решение, построенное по данному
методу, может быть далеким от оптимального.
4. Составить начальное опорное решение, используя метод северозападного угла, для транспортной задачи, исходные данные которой таковы:
Решение:
Распределяем запасы первого поставщика. Так как его запасы а1 = 200
меньше запросов первого потребителя b1 = 250, то в клетку (1, 1) записываем
перевозку x11 = 200 и исключаем из рассмотрения первого поставщика (табл.
6.1).
Определяем
оставшиеся
неудовлетворенными
потребителя
запросы
первого
.
Распределяем запасы второго поставщика. Так как его запасы a2 =
350 больше
оставшихся
потребителя
неудовлетворенными
запросов
первого
, то в клетку (2, 1) записываем перевозку x21 = 50 и
исключаем из рассмотрения первого потребителя. Определяем оставшиеся
запасы
как
второго
поставщика
.
Так
, то в клетку (2, 2) записываемх22 = 300 и исключаем по
своему усмотрению либо второго поставщика, либо второго потребителя. Пусть
93
исключили второго поставщика. Вычисляем оставшиеся неудовлетворенными
запросы второго потребителя
.
Распределяем запасы третьего поставщика.
Так как а3 > b'2 (400 > 0), то в клетку (3, 2) записываем х32 = 0 и исключаем
второго
потребителя.
Запасы
изменились
третьего
. Сравниваем
поставщика
не
и b3 (400 > 200), в
клетку (3, 3) записываем х33 = 200, исключаем третьего потребителя и
вычисляем
. Так как
, то в клетку (3, 4)
записываем х34 = 200. Ввиду того, что задача с правильным балансом, запасы
всех поставщиков исчерпаны и запросы всех потребителей удовлетворены
полностью.
Результаты построения опорного решения приведены в табл. 6.1.
Таблица 6.1
Проверяем правильность построения опорного решения. Число занятых
клеток должно быть равно N = m + n – l = 3 + 4 – l = 6. В табл. 32.1 занято 6
клеток. Применяя метод вычеркивания, убеждаемся, что найденное решение
является «вычеркиваемым»:
94
Следовательно, векторы условий, соответствующие занятым клеткам,
линейно независимы и построенное решение действительно является опорным.
6.3 Метод минимальной стоимости
Данный метод позволяет построить опорное решение, которое достаточно
близко к оптимальному, так как использует матрицу стоимостей транспортной
задачи С = (сij), i = 1, 2, ..., т; j = 1, 2, ..., п. Как и метод северо-западного угла,
он состоит из ряда однотипных шагов, на каждом из которых заполняется
только одна клетка таблицы, соответствующая минимальной стоимости
, и исключается из рассмотрения только одна строка (поставщик) или
один столбец (потребитель). Очередную клетку, соответствующую
,
заполняют по тем же правилам, что и в методе северо-западного угла.
Поставщик исключается из рассмотрения, если его запасы заканчиваются.
Потребитель исключается из рассмотрения, если его запросы удовлетворены
полностью. На каждом шаге исключается либо один поставщик, либо один
потребитель. При этом если поставщик еще не исключен, но его запасы равны
нулю, то на том шаге, когда от него требуется поставить груз, в
соответствующую клетку таблицы заносится базисный нуль и лишь, затем
поставщик
исключается
из
рассмотрения.
Аналогично
поступают
с
потребителем.
5. Используя метод минимальной стоимости, построить начальное опорное
решение транспортной задачи, исходные данные которой таковы:
95
Решение:
Запишем отдельно матрицу стоимостей для того, чтобы удобнее было
выбирать минимальные стоимости, вычеркивать строки и столбцы:
Среди
элементов
матрицы
стоимостей
выбираем
наименьшую
стоимость с11 = 1, отмечаем ее кружочком. Это стоимость перевозки груза от
первого поставщика первому потребителю. В соответствующую клетку (1, 1)
записываем максимально возможную перевозку х11 = min{a1,b1} = min{120, 80}
= 80 (табл. 6.2). Запасы первого поставщика уменьшаем на 80, а*1 = а1 –
b1 = 120 – 80 = 40. Исключаем из рассмотрения первого потребителя, так как
его запросы удовлетворены. В матрице С вычеркиваем первый столбец.
Таблица 6.2
96
В оставшейся части матрицы С наименьшей является стоимость с14 = 2.
Максимально возможная перевозка, которую можно осуществить от первого
поставщика четвертому потребителю, равна
.
В соответствующую клетку таблицы записываем перевозку х14 = 40.
Запасы первого поставщика исчерпаны, исключаем его из рассмотрения. В
матрице С вычеркиваем первую строку. Запросы четвертого потребителя
уменьшаем на 40,
.
В оставшейся части матрицы С минимальная стоимость с24 = с32 = 3.
Заполняем одну из двух клеток таблицы (2, 4) или (3, 2). Пусть в клетку (2, 4)
запишем х24 = min{a2, b4} = min{160, 80} = 80. Запросы четвертого потребителя
удовлетворены полностью, исключаем его из рассмотрения, вычеркиваем
четвертый
столбец
в
матрице С.
поставщика
Уменьшаем
запасы
второго
.
В оставшейся части матрицы С минимальная стоимость
min{cij} = с32= 3.
Запишем в клетку таблицы (3, 2) перевозку
х32 = min{a3, b2) = min{200, 120} – 120.
Исключаем из рассмотрения второго потребителя, а из матрицы С второй
столбец. Вычисляем а'3 = а3 – b2 = 200 – 120 = 80.
В оставшейся части матрицы С наименьшая стоимость
min{cij} = с33 = 6.
Запишем в клетку таблицы (3, 3) перевозку
x33 = min{a3, b3} = min{80, 160} = 80.
Исключаем из рассмотрения третьего поставщика, а из матрицы С третью
строку. Определяем b'a = b3 – а'3 = 160 – 80 = 80.
В матрице С остался единственный элемент с23 = 8. Записываем в клетку
таблицы (2, 3) перевозку х23= 80.
97
Проверяем правильность построения опорного решения. Число занятых
клеток таблицы равно N = m + n – l = 3 + 4 – l = 6 (см. табл. 6.2). Применяя
метод вычеркивания, проверяем линейную независимость векторов условий,
соответствующих
положительным
координатам
решения.
Порядок
вычеркивания показан на матрице X:
Решение является «вычеркиваемым» и, следовательно, опорным.
6.4 Переход от одного опорного решения к другому
В транспортной задаче переход от одного опорного решения к другому
осуществляется с помощью цикла. Для некоторой свободной клетки таблицы
строится цикл, содержащий часть клеток, занятых опорным решением. По
этому циклу перераспределяются объемы перевозок (осуществляется сдвиг по
циклу).
Перевозка
«загружается»
в
выбранную
свободную
клетку
и
освобождается одна из занятых клеток, получается новое опорное решение.
Если таблица транспортной задачи содержит опорное решение, то для
любой свободной клетки таблицы существует единственный цикл, содержащий
эту клетку и часть клеток, занятых опорным решением.
Для удобства вычислений вершины циклов нумеруют и отмечают
нечетные
знаком
«+»,
а
четные
называется означенным (рис. 8).
98
знаком
«–».
Такой
цикл
Рис. 8
Сдвигом по циклу на величину θ называется увеличение объемов
перевозок во всех нечетных клетках цикла, отмеченных знаком «+», и
уменьшение объемов перевозок на ту же величину θ во всех четных клетках,
отмеченных знаком «–».
Для следующих транспортных задач составить начальные опорные
решения, используя методы северо-западного угла и минимальной стоимости:
99
7 МЕТОД ПОТЕНЦИАЛОВ
7.1 Общие понятия
Широко
распространенным
методом
решения
транспортных
задач
является метод потенциалов.
Если допустимое решение X = (хij), i = 1, 2, ..., m; j = 1, 2, ..., п транспортной
задачи
является
оптимальным,
то
существуют
потенциалы
(числа)
поставщиков ui, i = 1, 2, ..., т и потребителей vj, j = 1, 2, ..., п, удовлетворяющие
следующим условиям:
ui + υj = cij при xij > 0, (46)
ui + υj ≤ cij при xij = 0. (47)
Группа равенств (46) используется как система уравнений для нахождения
потенциалов. Данная система уравнений имеет m +п неизвестных ui, i = 1, 2,
..., m и vj, j = 1,2, ..., п. Число уравнений системы, как и число отличных от нуля
координат невырожденного опорного решения, равно m + п – 1. Так как число
неизвестных системы на единицу больше числа уравнений, то одной из них
можно задать значение произвольно, а остальные найти из системы.
Группа неравенств (47) используется для проверки оптимальности
опорного решения. Эти неравенства удобнее представить в следующем виде:
∆ij = ui + υi – сij ≤ 0 при хij. (48)
Числа Δij называются оценками для свободных клеток таблицы (векторов
условий) транспортной задачи.
Опорное решение является оптимальным, если для всех векторов условий
(клеток таблицы) оценки неположительные.
Оценки для свободных клеток транспортной таблицы используются при
улучшении опорного решения. Для этого находят клетку (l, k) таблицы,
соответствующую max{ Δij } = Δlk. Если Δlk ≤ 0, то решение оптимальное. Если
же Δlk ≥ 0, то для соответствующей клетки (l, k) строят цикл и улучшают
решение, перераспределяя груз
θ=
{xij} по этому циклу.
100
Особенности решения транспортных задач
с неправильным балансом
1. Если суммарные запасы поставщиков превосходят суммарные запросы
потребителей, т.е.
,
то
необходимо
запросами
ввести
фиктивного (n + 1)-го
потребителя
с
, равными разности суммарных запасов поставщиков
и запросов потребителей, и нулевыми стоимостями перевозок единиц
груза ci(n+1) = 0
i.
2. Если суммарные запросы потребителей превосходят суммарные запасы
поставщиков, т.е.
,
то
необходимо
запасами
ввести
,
фиктивного (т + 1)-го
равными
разности
поставщика
суммарных
с
запросов
потребителей и запасов поставщиков, и нулевыми стоимостями перевозок
единиц груза c (m+1)j = 0
j.
3. При составлении начального опорного решения в последнюю очередь
следует распределять запасы фиктивного поставщика и удовлетворять запросы
фиктивного потребителя, несмотря на то, что им соответствует наименьшая
стоимость перевозок, равная нулю.
7.2 Алгоритм решения транспортных задач методом потенциалов
1. Проверить
выполнение
необходимого
и
достаточного
условия
разрешимости задачи. Если задача имеет неправильный баланс, то вводится
фиктивный поставщик или потребитель с недостающими запасами или
запросами и нулевыми стоимостями перевозок.
101
2. Построить начальное опорное решение (методом минимальной
стоимости или каким-либо другим методом), проверить правильность его
построения по количеству занятых клеток (их должно быть т + п – 1) и
убедиться в линейной независимости векторов условий (используя метод
вычеркивания).
3. Построить систему потенциалов, соответствующих опорному решению.
Для этого решают систему уравнений
ui + υj = сij при хij >0,
которая имеет бесконечное множество решений. Для нахождения частного
решения
системы
одному
из
потенциалов
(обычно
тому,
которому
соответствует большее число занятых клеток) задают произвольно некоторое
значение (чаще нуль). Остальные потенциалы однозначно определяются по
формулам
ui = сij – υj при хij >0, (49)
если известен потенциал vj, и
υj = сij – ui при хij >0, (50)
если известен потенциал ui.
4. Проверить выполнение условия оптимальности для свободных клеток
таблицы. Для этого вычисляют оценки для всех свободных клеток по формулам
∆ij = ui + υj – cij
и те из них, которые больше нуля, записывают в левые нижние углы
клеток. Если для всех свободных клеток Δij < 0, то вычисляют значение целевой
функции и решение задачи заканчивается, так как полученное решение
является оптимальным. Если же имеется хотя бы одна клетка с положительной
оценкой, опорное решение не является оптимальным.
5. Перейти к новому опорному решению, на котором значение целевой
функции будет меньше. Для этого находят клетку таблицы задачи, которой
соответствует наибольшая положительная оценка
.
102
Строят цикл, включающий в свой состав данную клетку и часть клеток,
занятых опорным решением. В клетках цикла расставляют поочередно знаки
«+» и «–», начиная с «+» в клетке с наибольшей положительной оценкой.
Осуществляют сдвиг (перераспределение груза) по циклу на величину θ =
{xij}. Клетка со знаком «–», в которой дотигается
{xij}, остается пустой.
Если минимум достигается в нескольких клетках, то одна из них остается
пустой, а в остальных проставляют базисные нули, чтобы число занятых клеток
оставалось равным т + п – 1.
Далее перейти к пункту 3 данного алгоритма.
10. Решить транспортную задачу, исходные данные которой таковы:
Решение:
1. Проверяем
выполнение
необходимого
и
достаточного
условия
разрешимости задачи. Находим суммарные запасы поставщиков и суммарные
запросы потребителей:
Задача с неправильным балансом. Вводим четвертого, фиктивного
поставщика с запасами а4 = 1100 – 1000 = 100 и нулевыми стоимостями
перевозок единиц груза (табл. 7.1).
2. Находим начальное опорное решение методом минимальной стоимости
(см. табл. 7.1). Полученное решение X1 имеет
m + n – 1 = 4 + 4 – 1 = 7 базисных переменных. Вычисляем значение
целевой функции на этом опорном решении:
103
Z(Х1) = 1 ∙ 200 + 2 ∙ 200 + 3 ∙ 100 + 7 ∙ 100 + 9 ∙ 300 +
+ 12 ∙ 100 + 0 ∙ 100 = 5300.
Таблица 32.3
3. Для проверки оптимальности опорного решения необходимо найти
потенциалы. По признаку оптимальности в каждой занятой опорным решением
клетке таблицы транспортной задачи сумма потенциалов равна стоимости
(ui + vj = cij при xij > 0).
Записываем
систему
уравнений
для
нахождения
потенциалов и решаем ее:
Система состоит из семи уравнений и имеет восемь переменных. Система
неопределенная. Одному из потенциалов задаем значение произвольно: пусть u3 =
0. Остальные потенциалы находятся однозначно:
104
Значения потенциалов записываем в таблицу рядом с запасами или
запросами соответствующих поставщиков и потребителей (табл. 7.2).
Система уравнений для нахождения потенциалов достаточно проста, обычно
ее решают устно. Любой неизвестный потенциал, соответствующий занятой
клетке, равен находящейся в этой клетке стоимости минус известный
потенциал, соответствующий этой же клетке.
Таблица 7.2
4. Проверяем опорное решение X1 на оптимальность. С этой целью
вычисляем оценки Δij для всех незаполненных клеток таблицы (для всех
занятых клеток Δij = 0):
105
Положительные оценки записываем в левые нижние углы соответствующих
клеток таблицы, вместо отрицательных ставим знак «–».
Начальное опорное решение не является оптимальным, так как имеется
положительная оценка Δ24 = 2.
5. Переходим к новому опорному решению. Для клетки (2, 4) с
положительной оценкой строим цикл. Ставим в эту клетку знак «+»,
присоединяем ее к занятым клеткам и, применяя метод вычеркивания, находим
цикл (2, 4), (3, 4), (3, 2), (2, 2). Цикл изображен в табл.
7.2. В угловых точках цикла расставляем поочередно знаки «+» и «–»,
начиная с «+» в клетке (2, 4). В клетки, отмеченные знаком «+», добавляется
груз θ, а из клеток, отмеченных знаком «–», убавляется такой же по величине
груз. Определяем величину груза θ, перераспределяемого по циклу. Она равна
значению наименьшей из перевозок в клетках цикла, отмеченных знаком «–»:
.
Осуществляем сдвиг по циклу на величину θ = 100. Получаем второе
опорное решение Х2 (табл. 32.5).
Таблица 32.5
106
Находим для этого решения потенциалы (они приведены в табл. 32.5).
Вычисляем оценки:
Все
оценки
неположительные.
Следовательно,
решение
оптимальным. Вычисляем значение целевой функции на этом решении:
Z(X2) = 1 ∙ 200 + 2 ∙ 200 + 6 ∙ 100 + 7 ∙ 200 + 9 ∙ 300 + 0 ∙ 100 = 5200.
О т в е т : min Z(X) = 5200 при
.
107
является
8 ТРАНСПОРТНАЯ ЗАДАЧА С ОГРАНИЧЕНИЕМ НА ПРОПУСКНУЮ
СПОСОБНОСТЬ
8.1 Транспортная задача с ограничениями на пропускную способность
Пусть требуется при решении транспортной задачи ограничить перевозки
от поставщика с номером l к потребителю с номером k. Возможны ограничения
двух типов: 1) хlk ≥ а; 2) xlk b, где а и b – постоянные величины.
1.
Если xlk ≥ а, то
необходимо
прежде,
чем
решать
задачу,
сократить (уменьшить) запасы l-го поставщика и запросы k-го потребителя на
величину а (зарезервировать перевозку xlk = а). В полученном оптимальном
решении следует увеличить объем перевозки xlk, на величину а.
2.
Если xlk ≤ b, то
необходимо
вместо k-го
потребителя
с
запросами bk ввести двух других потребителей. Один из них с номеромk должен
иметь запросы
, а другой с номером п + 1 – запросы bn+1 = bk – b. Стоимости
перевозок для этих потребителей остаются прежними, за исключением
стоимости cl(n+1), которая принимается равной сколь угодно большому
числу М (М » 1). После получения оптимального решения величины грузов,
перевозимых к (п + 1)-му потребителю, прибавляются к величинам перевозок kго потребителя. Так как cl(n+1) = M – самая большая стоимость перевозки, то в
оптимальном решении клетка с номером (l, n + 1) останется пустой (хl(п+1) = 0) и
объем перевозки xlk не превзойдет b.
1. Решить транспортную задачу, исходные данные которой приведены в
табл. 8.1, при дополнительных условиях: объем перевозки груза от второго
поставщика второму потребителю должен быть не менее 200 единиц (х22 ≥ 200),
а от третьего первому – не более 300 единиц (x31 ≤ 300).
Таблица 8.1
Решение:
108
Для того чтобы в оптимальном решении объем перевозки х22 был не менее
200 единиц, при решении задачи будем предполагать, что запасы второго
поставщика а2 и запросы второго потребителя b2 меньше фактических на 200
единиц. После получения оптимального решения объем перевозки х22 увеличим
на 200 единиц.
Для того чтобы удовлетворить требованию х31 ≤ 300, вместо первого
потребителя введем двух других. Один из них под прежним первым номером
имеет запросы b1 = 300 единиц и прежние стоимости перевозок единиц груза.
Другому присвоим четвертый номер. Его запросы равны b4 = 600 – 300 = 300
единиц и стоимости перевозок единиц груза те жe, что и у первого потребителя,
за
исключением с34, которую
примем
равной
сколь
угодно
большому
числу М, т.е. с34 = М. После нахождения оптимального решения задачи объемы
перевозок
для
четвертого
потребителя
необходимо
прибавить
к
соответствующим объемам перевозок для первого потребителя.
В результате указанных преобразований таблица исходных данных задачи
будет иметь следующий вид:
Далее задачу решаем обычным методом потенциалов. Проверяем
выполнение необходимого и достаточного условия существования решения
задачи. Находим суммарные запасы поставщиков и запросы потребителей:
a1 + a2 + a3 = 300 + 200 + 500 = 1000;
b1 + b2 + b3 + b4 = 300 + 300 + 400 + 300 = 1300.
Задача с неправильным балансом. Вводим фиктивного поставщика с
запасами а4 = 1300 – 1000 = 300 единиц (табл. 8.2).
109
Таблица 8.2
Составляем
начальное
опорное
решение Х1 методом
минимальной
стоимости находим потенциалы (см. табл. 8.2). Вычисляем оценки для
свободных клеток таблицы. Все оценки неположительные, кроме оценки Д31 8. Находим цикл для клетки (3, 1). Он состоит из клеток (3, 1), (1, 1), (1, 4), (4,
4), (4, 3), (3, 3). Находим величину груза для перераспределения по
означенному циклу θ =
{200, 100, 300} = 100 при (i, j) = (4,4). Осуществляем
сдвиг по этому циклу на величину θ = 100, получаем второе опорное
решение Х2 (табл. 8.3).
Таблица 8.3
110
Решение:
Х2 оптимальное,
так
как
все
оценки
неположительные.
Запишем оптимальное решение исходной задачи. Для этого увеличим объем
перевозки х22 на 200 единиц и объединим объемы перевозок четвертого
потребителя с объемами перевозок первого потребителя. Получим
.
Вычислим значение целевой функции на оптимальном решении:
Z(X*) = 2 ∙ 300 + 2 ∙ 200 + 11 ∙ 200 + 4 ∙ 100 + 10 ∙ 300 + 12 ∙ 100 = 7800.
О т в е т : min Z(X) - 7800 при
.
Решить транспортные задачи с учетом ограничений на перевозки грузов:
111
9 ТРАНСПОРТНАЯ ЗАДАЧА ПО КРИТЕРИЮ ВРЕМЕНИ
9.1 Транспортная задача по критерию времени
Задача по критерию времени возникает при перевозке срочных грузов. Как
и в обычной транспортной задаче, имеется тпоставщиков с пасами однородного
груза в количестве а1, а2, ..., ат и п потребителей, оторым этот груз должен быть
112
доставлен в объемах bl, b2, ..., bn. Известны tij, i =1,2, ..., m; j = 1, 2, ..., n –
интервалы времени, за которые груз доставляется от каждого i-roпоставщика
каждому j-му потребителю. Требуется составить такой план перевозок груза,
при котором запасы всех поставщиков вывозятся полностью, запросы всех
потребителей удовлетворяются полностью и наибольшее время доставки всех
грузов является минимальным.
Составим математическую модель этой задачи. Обозначим xij – объем
перевозимого груза от i-го поставщика j-му потребителю. Система ограничений
задачи не отличается от системы ограничений обычной транспортной задачи.
Пусть X = (хij), i = 1, 2, ..., m; j = 1, 2, ..., п – некоторое опорное решение задачи.
Запишем
значение
целевую
функцию
элементов
задачи.
матрицы Т =
Обозначим
через Т(Х) наибольшее
(tij), i = 1,
2,
..., m; j = 1,
2,
..., n, соответствующих клеткам таблицы, занятым опорным решением: Т(Х) =
{tij}. Таким образом, за время Т(Х) план перевозок будет выполнен
полностью.
Математическая модель транспортной задачи по критерию времени имеет
вид
Задача решается в следующем порядке. Находится начальное опорное
решение X1. Определяется значение целевой функцииТ(Х1) =
. Все
свободные
клетки,
которым
соответствуют
значения tij > T(X1), исключаются из рассмотрения (перечеркиваются). Заниг
113
мать эти клетки нецелесообразно, так как увеличится значение целевой
функции. Чтобы уменьшить ее значение, необходимо освободить клетку (l1, k1),
в которой tij достигает максимума. Для этого строят так называемые
разгрузочные циклы, которые могут включать в свой состав несколько
свободных клеток. В каждом разгрузочном цикле, начиная с разгружаемой
клетки (l1, k1), расставляются поочередно знаки «–» и « + » и осуществляется
сдвиг на величину
θ=
{xij}.
Если уда-ется эту клетку разгрузить, то она исключается из рассмотрения
(зачеркивается). Получается новое опорное решение Х2,на котором значение
целевой функции меньше, чем на X1. Далее снова пытаются разгрузить клетку,
соответствующую
.
Процесс продолжается до тех пор, пока возможность разгрузить
соответствующую клетку не исчезнет.
32.42. Найти минимальное время на осуществление всех перевозок для
следующей задачи:
Решение:
Составим начальное опорное решение Х1 методом северо-за-падного угла
(табл. 9.1). Максимум целевой функции
Т(Х1) =
{13, 8, 7, 9, 5, 10, 4} = 13
114
достигается в клетке (1, 1). Перечеркнем клетки (4, 1) и (4, 3), в которых
время доставки груза t41 = 19 и t43 = 14 больше Т(Х1) = 13.
Для улучшения решения разгружаем клетку (1, 1) с помощью цикла (2, 1),
(1,1), (1, 2), (2, 2) (см. табл. 9.1). В означенном цикле находим θ =
{20, 30}
= 20. Осуществляя сдвиг по циклу, получаем второе опорное решение Х2 (табл.
9.2). Максимум целевой функции на этом опорном решении T(Х2) =
{8, 6,
7, 9, 5, 10, 4} = 10 достигается в клетке (3, 4). Перечеркиваем клетки (1, 1), (1, 4)
и (3, 2), в них время t11 = 13, t14 = 11 и t32 = 12 больше, чем Т(Х2) = 10.
Разгружаем клетку (3, 4) с помощью цикла (2, 4), (3, 4), (3, 3), (2, 3). В
означенном цикле находим θ =
{10, 10}= 10. Осуществляя сдвиг по циклу,
получаем третье опорное решение Xs (табл. 9.3).
Таблица 9.3
115
Максимум целевой функции на этом опорном решении
Т(Х3) =
{8, 6, 7, 8, 5, 4} = 8 достигается в клетках (1, 2) и (2, 4).
Перечеркиваем клетки (2, 3) и (3, 4), в которых время больше, чемТ(Х3) = 8. С
помощью оставшихся невычеркнутых клеток разгрузить клетки (1, 2) и (2, 4) не
удается, поэтому Х3 является оптимальным решением.
О т в е т : min Т(Х) = 8 при
.
Решить транспортные задачи по критерию минимума времени:
10 МЕТОД ГОМОРИ РЕШЕНИЯ ЗАДАЧ ЦЕЛОЧИСЛЕННОГО
ПРОГРАММИРОВАНИЯ
116
10.1 Метод Гомори
В
общем
случае задача
целочисленного
программирования формулируется следующим образом: найти максимум или
минимум функции
(55)
при условиях
Согласно методу Гомори задача линейного программирования
сначала
решается
симплексным
методом
без
учета
целочисленности
переменных. Если оптимальное решение оказывается целочисленным, то
решение задачи заканчивается. Если оптимальное решение нецелочисленное, то
из системы ограничений выбирается уравнение, для которого дробная часть
координаты оптимального решения имеет наибольшее значение, и на его
основе
составляется
дополнительное
ограничение.
Дополнительное
ограничение отсекает от области допустимых решений нецелочисленное
оптимальное решение, но при этом сохраняет целочисленные вершины этой
области.
Пусть i-е
ограничение
задачи,
находящееся
в
последней
симплексной таблице, имеет вид
(59)
где xi – базисная переменная в уравнении;
xij – коэффициенты при неизвестных (коэффициенты разложений
векторов условий по базису опорного решения);
xj – свободные переменные в системе уравнений;
117
– правая часть уравнения (координата оптимального решения),
которая является дробным числом.
Тогда дополнительное ограничение имеет вид
(60)
где
– дробная часть
;
qij – дробная часть xij.
Число [xi] называется целой частью числа xi, если оно наиболее
близкое к нему целое и не превосходит xi.
Дробная часть qi числа xi находится как разность этого числа и его
целой части:
qi = xi – [xi]. (61)
Например, для числа 7/4 целая часть [7/4] = 1, дробная часть
равна 7/4 – 1 = ¾.
В
неравенство
(60)
вводится
дополнительная
переменная хп+1, получается уравнение
(62)
В систему ограничений задачи это ограничение записывается в виде
(63)
После
этого
решение
задачи
продолжают
двойственным
симплексным методом. Если получается целочисленное решение, то процесс
решения заканчивается, в противном случае необходимо снова составить
дополнительное ограничение.
Задача не имеет целочисленного решения, если оптимальное
решение содержит координату с дробной частью и все коэффициенты
соответствующего уравнения являются целыми.
118
1. Найти оптимальное целочисленное решение задачи
Решение:
Приводим
задачу
к
каноническому
виду
с
помощью
дополнительных переменных х4, х5, х6:
Данная задача имеет начальное опорное решение X1 = (2, 0, 0, 0, 3,
6) с базисом из единичных векторов Бг = (A1, A5, A6). Все описанные ниже
вычисления приведены в табл. 33.1. Записываем опорное решение в
симплексную таблицу и вычисляем оценки разложений векторов условий по
базису этого решения. Данное решение не является оптимальным, так как в
задаче на максимум для вектора А3 оценка Δ3 = -8 < 0. Вводим в базис опорного
решения вектор А3 вместо вектора А5, получаем оптимальное решениеХ2 = (1/2,
0, 3/2, 0, 0, 3/2) с дробными координатами. Составляем дополнительное
ограничение. Для этого используем ограничение, у которого правая часть имеет
большую дробную часть. Находим дробные части правых частей уравнений
(координат опорного решения): 1/2 – 0 = 1/2; 3/2 – 1 = 1/2. Так как они равны
между собой, для составления дополнительного ограничения используем по
119
своему усмотрению первое уравнение. Находим дробные части коэффициентов
этого уравнения
Составляем дополнительное ограничение:
Таблица 10.1
Это уравнение записано в табл. 10.1 после строки оценок, и, так как
оно имеет разрешенную неизвестную х7, вектор А7включаем в число базисных
неизвестных, в результате чего опорное решение Х2 превращается в почти
допустимое опорное решение Х2 = (1/2, 0, 3/2, 0, 0, 3/2). Введение вектора А7 в
базис не приводит к изменению оценок. В задаче на максимум все оценки
неотрицательные, условия для применения двойственного симплексного
метода выполняются. Теперь вектор А7 необходимо вывести из базиса, так как
дополнительное ограничение имеет в правой части отрицательную величину. С
помощью
параметра
θ0l,
вычисляемого
по
формуле,
находится
вектор А2, вводимый в базис. В результате преобразования Жордана с
разрешающим элементом -1/2 при х2 получается новое опорное решение Х3 = (2,
120
1, 2, 0, 0, 2, 0), координаты которого являются целыми. Следовательно, это и
есть оптимальное решение.
О т в е т : maxZ(X) = 7 при X* = (2, 1, 2).
11 НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
11.1 Цели
Рассмотрим
п р о г р а м м и р о в а ни я
о п ти м и з а ц и о н н ые
з а да ч и
нелинейного
(НЛП), математические модели которых содержат
нелинейные зависимости от переменных. Источники не линейности относятся в
основном к одной из двух категорий:
1) реально существующие и эмпирически наблюдаемые нелинейные
соотношения, например: непропорциональные зависимости между объемом
производства и затратами; между количеством используемого в производстве
компонента и некоторыми показателями качества готовой продукции; между
затратами сырья и физическими параметрами (давление, температура и т.п.)
соответствующего производственного процесса; между выручкой и объемом
реализации и др.;
2) установленные (постулируемые) руководством правила поведения или
задаваемые зависимости, например: формулы или правила расчета с
потребителями энергии или других видов услуг; эвристические правила
определения страховых уровней запаса продукции; гипотезы о характере
вероятностного распределения рассматриваемых в модели случайных величин;
различного рода договорные условия взаимодействия между партнерами по
бизнесу и др.
Решать линейные задачи значительно проще, чем нелинейные, и если
линейная модель обеспечивает адекватность реальным ситуациям, то ее и следует
использовать. В практике экономического управления модели линейного
программирования успешно применялись даже в условиях нелинейности. В
одних случаях нелинейность была несущественной и ею можно было
пренебречь, в других – производилась линеаризация нелинейных соотношений
121
или применялись специальные приемы, например, строились так называемые
линейные аппроксимационные модели, благодаря чему достигалась требуемая
адекватность. Тем не менее, имеется большое число ситуаций, где
нелинейность является существенной и ее нужно учитывать в явном виде.
Далее приводятся общая модель задачи нелинейного программирования и
классы задач НЛП, а также описываются условия оптимальности решения.
После того как вы выполните задания, предлагаемые в этой главе, вы
будете уметь определять и использовать для экономического анализа:
·целевую функцию;
·ограничения;
·допустимый план;
·множество допустимых планов;
·модель нелинейного программирования;
·оптимальный план.
Вы сможете также:
·определять, является ли функция выпуклой;
·строить функцию Лагранжа задачи НЛП;
·проверять оптимальность полученных решений.
11.2 Модели
В общем виде задача НЛП описывается с помощью следующей модели
нелинейного программирования:
где х = (х1, х2, …, xn) – вектор переменных задачи.
Задача (1)–(3) называется задачей нелинейного программирования в
стандартной форме на максимум.
Может быть сформулирована также задача НЛП на минимум.
122
Вектор х =
(х1, х2,
…, xn),
компоненты хj которого
удовлетворяют
ограничениям (2) и (3), называется допустимым решениемили допустимым
планом задачи НЛП.
Совокупность
всех
допустимых
планов
называется множеством
допустимых планов.
Допустимое решение задачи НЛП, на котором целевая функция (1)
достигает
максимального
значения,
называется
оптимальным
решением задачи НЛП.
Возможное местонахождение максимального значения функции F(x) при
наличии ограничений (2) и (3) определяется следующим общим принципом.
Максимальное значение F(x), если оно существует, может достигаться в одной
или более точках, которые могут принадлежать следующим множествам: S1 =
{(х1, ..., хn): (x1, ..., хп) – внутренняя точка множества допустимых планов, в
которой все первые частные производные
, j = 1, ..., n}; S2 = {(х1,
..., хn) : (x1,..., хп) – точка границы множества допустимых планов};S3 = {(х1,
..., хn) : (x1, ..., хп) – точка множества допустимых планов, в которой
функция F(x) недифференцируема}.
В отличие от задач линейного программирования, любая из которых может
быть решена симплекс-методом, не существует одного или нескольких
алгоритмов, эффективных для решения любых нелинейных задач. Какой-то
алгоритм может оказаться чрезвычайно эффективным для решения задач одного
типа и неудачным для задач другого типа.
Эффективность
алгоритма
может
даже
существенно
зависеть
от
постановки задачи, например от изменения масштабов измерения тех или иных
переменных. Поэтому алгоритмы разрабатываются для каждого класса (типа)
задач. Программы, ориентированные на решение определенного класса задач,
как правило, не гарантируют правильность решения любых задач данного
класса, и оптимальность решения рекомендуется проверять в каждом
конкретном случае.
123
В экономических приложениях рассматриваются следующие классы
задач НЛП.
I.
Оптимизация
нелинейной
функции
с
ограничениями
на неотрицательность значений переменных:
где
– вектор переменных задачи.
Пусть F(x) – дифференцируемая функция. Необходимые условия того, что
в точке х0 достигается максимум функции F(x):
Это означает, что:
и
Если F(x) в о г н у та я функция (для задачи минимизации – в ып у к л а я ), то
эти условия являются также достаточными.
Функция F(x) с числовыми значениями, определенная на выпуклом
множестве точек К, называется в о г н у то й , если для любой пары точек х1, х2 и
для всех чисел λ, 0 ≤ λ ≤ 1, выполняется неравенство F(λх1 + (1 – λ)х2) ≥ λF(x1) +
(1 – λ)F(x2).
Если F(λх1 +
(1
– λ)х2)
≤ λF(x1)
+
(1
– λ)F(x2), то
функция F(x) называется в ы п у к л о й . Если имеют место строгие неравенства,
то говорят, что функция с тр о г о в о г н у та или с тр о г о в ып у к л а .
Данное определение вогнутости (выпуклости) годится для любого типа
функции. Практически, однако, применять его трудно.
124
Для дважды дифференцируемой функции F(x) имеет место следующий
критерий. Дифференцируемая функция F(x) с тр о г о в ог н у та в некоторой
окрестности точки х0 = (х10, х20, ..., хn0), если выполняются следующие условия:
т.е.
если
знаки
образом. Здесь
этих
определителей
чередуются
указанным
– частная производная второго порядка, вычисленная в
точке х0.
Матрица
размера п ´ п, составленная
из
элементов
, называется
матрицей Хессе (Hesse). По значениям ее главных миноров можно судить о
выпуклости или вогнутости функции. Функция F(x) с тр о г о в ып у к л а в малой
окрестности точки х0, если все главные миноры ее матрицы Хессе строго
положительны. Если имеют место нестрогие неравенства (≥), то функция в
окрестности точки х0 в ып у к л а . Если при этом главные миноры матрицы Хессе
от х не зависят, то функция всюду (строго) выпукла.
Весьма
распространены
к в а др а ти ч н о г о
функция F(x) является
относящиеся
к
п р о г р а м м ир о в а н и я , в
квадратичной
данному
которых
типу м о де л и
целевая
функцией
переменных х1, х2, ..., хп. Существует большое число алгоритмов решения
125
такого типа задач, в которых функция F(x) вогнутая (для задач минимизации –
выпуклая).
II. Модели выпуклого программирования.
К такого рода моделям относятся задачи НЛП (1)–(3), в которых F(x) –
вогнутая (выпуклая) функция, a gi(x) – выпуклые функции. При данных
условиях локальный максимум (минимум) является и глобальным.
Пусть F(x) и gi(x), i= 1, ..., т, – дифференцируемые функции.
Необходимые
и
достаточные
условия
оптимальности
решения
–
выполнение условий Куна-Таккера.
Рассмотрим задачу НЛП (1)–(3) и функцию Лагранжа
L(x, λ) = = F(x) +
Условия
λi[bi – gi(x)].
Куна-Таккера
оптимальности
решения х0 для
задачи
максимизации F(x) имеют вид
где
–
частная
производная
функции
переменной хj при х = х0 и λ = λ0. Пусть
Лагранжа
по
максимальное
значение F(x)равно F(x0) = F0. Числа λi0 связаны
с F0 следующими
соотношениями:
Из этих соотношений видно, что числа λi0 характеризуют реакцию
значения F0 на изменение значения соответствующего bi.Например, если < 0, то
при
уменьшении bi (в
пределах
значение F0 увеличится, a λi0 = 0
указывает
126
устойчивости λi0)
на
несущественность соответствующего ограничения gi(x) ≤ bi, которое может быть
без ущерба для оптимального решения из системы ограничений исключено.
III. Сепарабельное программирование.
Специальный
случай
выпуклого
программирования
при
условии,
что F(x) и все gi(x) – сепарабельные функции, т.е.
Задачи данного вида сводятся к задачам линейного программирования.
IV. Дробно-нелинейное программирование.
Максимизировать (минимизировать) функцию F(x) = F1(x)/F2(x).
В частном случае, когда в числителе и знаменателе – линейные функции
(так называемая задача дробно-линейного программирования), задача сводится
к линейной.
V. Невыпуклое программирование.
Функция F(x) и (или) какие-либо gi(x) не выпуклы. Надежных методов
решения задач такого типа пока не существует.
127
11.3 Примеры
Пример 1
Сколько производить?
Предприятие располагает ресурсами двух видов сырья и рабочей силы,
необходимыми для производства двух видов продукции. Затраты ресурсов на
изготовление
одной
тонны
каждого
продукта,
прибыль,
получаемая
предприятием от реализации тонны продукта, а также запасы ресурсов указаны
в следующей таблице:
Стоимость одной тонны каждого вида сырья определяется следующими
зависимостями: (9 + 0,0088 r1) тыс. руб. для сырья 1 и (5 - 0,0086 r2) тыс. руб.
для сырья 2, где r1 и r2 – затраты сырья на производство продукции. Стоимость
одного часа трудозатрат определяется зависимостью (1 – 0,0002r), где r –
затраты времени на производство продукции.
Вопросы
1. Сколько продукта 1 следует производить для того, чтобы обеспечить
максимальную прибыль?
2. Сколько продукта 2 следует производить для того, чтобы обеспечить
максимальную прибыль?
3. Какова максимальная прибыль?
Решение:
Пусть х1 – объем выпуска продукта 1 (в тоннах), х2 – объем выпуска
продукта 2 (в тоннах). Тогда задача может быть описана в виде следующей
модели нелинейного программирования:
128
При использовании программы GINO исходную информацию для решения
этой задачи представляем в следующем виде:
MODEL:
1) MAX = 11 * X1 + 16 * X2 + 0,1 * X1 * X1 + 0,12 * X2 * X2 + 0,22 * * X1 * X2;
2) 3 * X1 + 5 * X2 < 120;
3) 4 * X1 + 6 * X2 < 150;
4) 14 * X1 + 12 * X2 < 400;
5) X1 > 0;
6) X2 > 0;
END
Получаем следующий результат:
OBJECTIVE FUNCTION VALUE
1) 507.407407
Ответы: 1. 16,67 т. 2. 13,89 т.
3. 507,407 тыс. руб.
Пример 2
Формирование портфеля ценных бумаг .
Клиент поручил брокерской конторе купить для него на 1 млн. руб. 1 акции
трех известных ему компаний. Сделка заключается на год. Клиент
заинтересован, с одной стороны, в максимизации средней прибыли на
129
вложенный капитал, а с другой – в минимизации риска, поскольку прибыль,
получаемая в конце года от акции каждой компании, является величиной
случайной. Известно, что чем прибыльнее акция, тем выше связанный с ней
риск, поэтому названные критерии являются противоречивыми. Клиенту это
обстоятельство разъяснили и попросили его указать относительную значимость
(«вес») критериев. Клиент, будучи человеком осторожным, высказал пожелание,
чтобы риск учитывался с весом втрое большим, чем прибыль. Получив такие
указания, сотрудники брокерской конторы сформулировали следующую
модель нелинейного программирования:
где xj – объем средств, затраченных на покупку акций типа j (тыс. руб.);
μj – математическое ожидание процента прибыли от вложения 1 тыс. руб. в
акции типа j;
σjj – дисперсия указанного выше процента прибыли;
σij – ковариация между процентами прибыли от вложения 1 тыс. руб. в акции
типа i и j (i ≠ j).
Первая сумма в критерии – ожидаемое значение прибыл обеспечиваемой
пакетом акций, вторая – дисперсия прибыли пакета акций, взятая с «весом» 3.
Дисперсия прибыли пакета акций служит мерой риска.
Пусть средние значения процентов годовой прибыли от акций компаний
составляют соответственно 8, 10 и 13%.
Дисперсии σ11 = 0,1, σ22 = 0,15, σ33 = 0.19. Ковариации σ12 = 0,01, σ13 = 0,02
σ23 = 0,03.
Вопросы
1. Является ли целевая функция строго вогнутой?
130
2. Какую сумму следует вложить в покупку акций типа 1?
3. Какую сумму следует вложить в покупку акций типа 3?
Решение:
Модель
нелинейного
(в
данном
случае
–
квадратичного)
программирования имеет вид
Найдем все частные производные второго порядка целевой функции:
Рассчитав значения соответствующих определителей (главных миноров
матрицы Хессе), можно убедиться, что выполняются условия (4), откуда
следует,
что
целевая
значений х1, х2, х3 (значения
функция
строго
определителей
не
выпукла
зависят
для
от
любых
значений
переменных).
Используя программу GINO, исходную информацию для решения этой
задачи представляем в следующем виде:
MODEL:
1) MAX = 0,08 * X1 + 0,1 * X2 + 0,13 * X3 – R1 – R2;
2) R1 = 0,3 * X1 * X1 + 0,45 * X2 * X2 + 0,57 * X3 * X3;
3) R2 = 0,06 * X1 * X2 + 0,12 * X1 * X3 + 0,18 * X2 * X3;
4) X1 + X2 + X3 = 1000;
5) X1 > 0;
6) X2 > 0;
7) Xj - целое;
END
Получаем следующий результат:
OBJECTIVE FUNCTION VALUE
1) 169988.211211
131
Непосредственной подстановкой полученного решения в условия (5)–(8)
можно убедиться, что условия Куна-Таккера выполняются, причем решение
обеспечивает глобальный максимум целевой функции.
Ответы: 1. Да, является (при любых значениях переменных).
2. 496,8 тыс. руб. 3. 197,93 тыс. руб.
Пример 3
Производство молочных продуктов.
Молокозавод производит для местного рынка три вида продуктов:
сметану, творог и сыр. Молоко поступает ежедневно из двух ферм.
Технологические и экономические данные о производимых продуктах
приведены в следующей таблице:
Затраты, связанные с приобретением сырья (молока), являются кусочнолинейной функцией закупаемого количества:
а) для фермы 1
132
б) для фермы 2
Вопросы
1. Какова максимальная ежедневная прибыль молокозавода?
2. Сколько молока следует закупать на ферме 1?
3. Сколько молока следует закупать на ферме 2?
4. Как изменится максимальная прибыль, если максимальное суточное
производство сметаны увеличить на 1 кг?
5. Как изменится максимальная прибыль, если максимальное суточное
производство творога уменьшить на 2 кг?
Решение:
Задача
может
быть
описана
с
помощью
модели
линейного
программирования.
Пусть х1 – количество молока, закупаемого на ферме 1, х2 – количество
молока, закупаемого на ферме 2. Представим х1 и х2 в следующем виде:
(в нашем случае
(в нашем случае
).
Тогда стоимость молока, закупаемого на ферме 1, описывается функцией
,
а стоимость молока, закупаемого на ферме 2, – функцией
.
Окончательно модель линейного программирования имеет вид
133
Структура матрицы задачи линейного программирования показана в
следующей таблице:
Используя для решения этой задачи программу POMWIN, получаем
следующий результат:
134
Далее представлена таблица, содержащая границы устойчивости по
коэффициентам целевой функции:
Границы устойчивости по правым частям ограничений:
135
Ответы: 1. 8275 руб. 2. 312,5 кг. 3. 218,75 кг.
4. Увеличится на 45 руб.
5. Уменьшится на 80 руб.
136
12 МОДЕЛИ УПРАВЛЕНИЯ ЗАПАСАМИ
12.1 Модели управления запасами
Возникновение теории управления запасами можно связать с именами Ф.
Эджуорта и Ф. Харриса, появившимися в конце XIX – (в начале XX века, в
которых исследовалась простая оптимизационная модель для определения
экономичного размера партии поставки для складской системы с постоянным
равномерным расходом «периодическим поступлением хранимого продукта.
Запасом называется любой ресурс, который хранится для удовлетворения
будущих нужд. Примерами запасов могут стать полуфабрикаты, готовые
изделия,
материалы,
различные
товары,
также
денежная
наличность,
находящаяся в хранилище.
Существуют причины, побуждающие фирмы создавать запасы:
1) дискретность поставок при непрерывном потреблении;
2) упущенная прибыль в случае отсутствия запаса;
3) случайные колебания:
а) спроса за период между поставками;
б) объема поставок;
в) длительности интервала между поставками;
4) предполагаемые изменения конъюнктуры:
а) сезонность спроса;
б) сезонность производства. Существуют также причины, побуждающие
предприятия стремиться к минимизации запасов на складах:
– плата за хранение запаса;
– физические потери при хранении;
– моральный износ продукта.
После того как вы выполните задания, предлагаемые в этой главе, вы
будете уметь формулировать и использовать для экономического анализа
следующие понятия:
запас;
·заказ;
137
·издержки выполнения заказа (издержки заказа);
·издержки хранения;
·упущенная прибыль (издержки дефицита);
·срок выполнения заказа;
·точка восстановления.
Модели
Существует проблема классификации имеющихся в наличии запасов. Для
решения этой задачи используется методика административного наблюдения.
Цель ее заключается в определении той части запасов фирмы, которая требует
наибольшего внимания со стороны отдела снабжения. Для этого каждый
компонент запасов рассматривается по двум параметрам:
1) его доля в общем количестве запасов фирмы;
2) его доля в общей стоимости запасов.
Методика 20/80
В соответствии с этой методикой компоненты запаса, составляющие 20%
его общего количества и 80% его общей стоимости, должны отслеживаться
отделом снабжения более внимательно.
Методика ABC
В рамках этой методики запасы, имеющиеся в распоряжении предприятия,
разделяются на три группы: А, В и С.
Группа А: 10% общего количества запасов и 65% их стоимости;
В: 25% общего количества запасов и 25% их стоимости;
С: 65% общего количества запасов и около 10% их стоимости.
Именно н а и м е н ьша я п о о б ъ е м у и н а и б о л е е ц е н н а я часть запасов
может стать предметом особого контроля и математического моделирования.
Необходимо отметить, что классификация запасов может быть основана не
только на показателях доли в общей стоимости и в общем количестве.
Некоторые виды запасов могут быть причислены к более высокому классу на
основании таких характеристик, как специфика поставок, качество и т.д.
138
Преимущество методики деления запасов на классы заключается в том, что для
каждого из них можно выбрать свой порядок контроля и управления.
Отметим
некоторые
моменты
политики
управления
запасами,
классификация которых проведена на основе АВС-анализа.
1. Запасы группы А требуют более внимательного и частого проведения
инвентаризации;
правильность
учета
запасов
этой
группы
должна
подтверждаться чаще.
2.
Планирование
характеризоваться
и
прогнозирование
большей
степенью
запасов
точности,
группы
нежели
А
должно
планирован и е
запасов групп В и С.
3. Для группы А нужно стараться создать страховой запас, чтобы избежать
больших расходов, связанных с отсутствием запасов этой группы.
4. Методы и приемы управления запасами, рассмотренные далее, должны
применяться прежде всего к группам А и В. Что касается запасов группы С,
обычно момент возобновления заказа по ним определяют исходя из конкретных
условий, а не на основе количественного метода, чтобы свести к минимуму
расходы на их контроль.
Рассмотрим основные понятия теории управления запасами.
Издержки
в ып о л н е н и я
з а к а з а (издержки заказа) – накладные
расходы, связанные с оформлением заказа. В промышленном производстве
такими издержками являются затраты на переналадку оборудования и
подготовительные операции.
И з д е р ж к и х р а н е н и я – расходы, связанные с физическим содержанием
товаров на складе, плюс возможные проценты на капитал, вложенный в запасы.
Обычно они выражены в абсолютных единицах или в процентах от закупочной
цены и связаны с определенным промежутком времени.
У п у ще н н а я п р иб ыл ь (издержки дефицита) – издержки, связанные с
неудовлетворенным спросом, возникающим из-за отсутствия продукта на
складе.
139
С о в о к у п н ы е и з де р ж к и за период представляют собой сумму издержек
заказа, издержек хранения и упущенной прибыли. Иногда к ним прибавляются
издержки на закупку товара.
С р о к в ып о л н е н и я з а к а з а – время с момента заказа до момента его
выполнения.
Т о ч к а в о с с та н о в л е н и я – уровень запаса, при котором делается новый
заказ.
13 ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ
13.1 Простейшая модель оптимального заказа
Предположим, что:
1) темп спроса на товар известен и постоянен;
2) получение заказа мгновенно;
3) закупочная цена не зависит от размера заказа;
4) дефицит не допускается.
И с х о дн ые да н н ые : темп спроса, издержки заказа, издержки хранения.
Р е з у л ь та т : оптимальный
размер
заказа,
время
между
заказами,
количество заказов за фиксированный период времени, совокупные издержки.
Размер заказа является постоянным. Заказ выполняется мгновенно. Уровень
запасов убывает с постоянной интенсивностью, пока не достигает нулевого
значения. В этот момент времени делается и мгновенно выполняется заказ и
уровень
запаса
восстанавливается
до
максимального
значения.
При
этом о п ти м а л ь н ым р е ше н и е м з а да ч и будет такой размер заказа, при
котором минимизируются общие издержки за период, равные сумме издержек
хранения и издержек заказа.
Динамика изменения количества продукта s на складе показана на рис. 9.
140
Рис. 9
Пусть Q – размер заказа;
Т – продолжительность периода планирования;
D, d – величина спроса за период планирования и в единицу времени
соответственно;
К – издержки одного заказа;
Н, h – удельные издержки хранения за период и в единицу времени
соответственно.
Тогда:
– издержки заказа за период планирования;
– издержки хранения за период планирования;
– совокупные издержки.
Кривые
издержек
заказа С1,
издержек
хранения С2 и
совокупных
издержек С показаны на рис. 10.
Рис. 10
Определив минимум функции совокупных издержек, получаем:
– оптимальный размер заказа;
141
– оптимальное число заказов за период;
– время цикла (оптимальное время между заказами).
Следует обратить внимание на то, что оптимальный размер заказа не
зависит от цены продукта.
13.2 Модель оптимального размера заказа с фиксированным
временем его выполнения
Предположим, что:
1) темп спроса на товар известен и постоянен;
2) время выполнения заказа известно и постоянно;
3) закупочная цена не зависит от размера заказа;
4) дефицит не допускается.
И с х о дн ые да н н ы е : темп спроса, издержки заказа, издержки хранения,
время выполнения заказа.
Р е з у л ь та т : оптимальный размер заказа, время между заказами, точка
восстановления запаса, количество заказов за фиксированный период времени,
совокупные издержки.
Размер заказа является постоянным. Время выполнения заказа постоянно.
Уровень запасов убывает с постоянной интенсивностью, пока не достигает
точки восстановления R. В этот момент делается заказ, который выполняется за
время L. К моменту поступления заказа размер запаса на складе равен
нулю. О п ти м а л ь н ым р е ш е н и е м з а да ч и будет такой размер заказа Q*, при
котором минимизируются общие издержки за период, равные сумме издержек
хранения и издержек заказа.
Динамика изменения количества продукта s на складе показана на рис. 11.
142
Рис. 11
Пусть Q – размер заказа;
Т – продолжительность периода планирования;
D, d – величина спроса за период планирования и в единицу времени
соответственно;
К – издержки одного заказа;
Н, h – удельные издержки хранения за период и в единицу времени
соответственно;
L – время выполнения заказа.
Тогда:
– издержки заказа за период планирования;
– издержки хранения за период планирования;
– совокупные издержки;
– оптимальный размер заказа;
R = dL – точка восстановления запаса;
– оптимальное число заказов за период;
143
– время цикла (оптимальное время между заказами).
Кривые
издержек
заказа С1,
издержек
хранения С2 и
совокупных
издержек С показаны на рис. 2.
13.3. Модель оптимального размера заказа с производством
Предположим, что:
1) темп спроса на товар известен и постоянен;
2) темп производства товара известен и постоянен;
3) время выполнения заказа известно и постоянно;
4) закупочная цена не зависит от размера заказа;
5) дефицит не допускается.
И с х о дн ые да н н ы е : темп спроса, темп производства, издержки заказа,
издержки хранения, время выполнения заказа.
Р е з у л ь та т : оптимальный размер заказа, время между заказами, точка
восстановления запаса.
Фирма производит продукт самостоятельно, хранит его на складе и
расходует с постоянным темпом. Если темп производства выше темпа спроса,
то излишки продукта накапливаются на складе. Когда количество продукта на
складе достигает максимального значения, производство прекращается и
продукт расходуется со склада с постоянным темпом. Когда запас на складе
достигает
точки
восстановления,
производство
возобновляется.
При
этом о п ти м а л ь н ым р е ше н и е м з а да ч и будет такой размер заказа Q*,при
котором минимизируются общие издержки за период, равные сумме издержек
хранения и издержек на возобновление (запуск) производства.
Динамика изменения количества продукта s на складе показана на рис. 4,
где tg α = р – d, tg β = d.
144
Рис. 12.
Пусть Q –размер заказа;
p – темп производства;
Т – продолжительность периода планирования;
D, d – величина спроса за период планирования и в единицу времени
соответственно;
К – фиксированные издержки на запуск производства;
Н, h – удельные издержки хранения за период и в единицу времени
соответственно;
L – время, необходимое для запуска производства.
Тогда:
– издержки на запуск производства;
– издержки хранения;
– оптимальный размер заказа;
– оптимальный максимальный уровень запасов;
R = dL – точка восстановления;
145
– оптимальное число заказов за период;
– время цикла (оптимальное время между заказами).
В этой модели оптимальный размер заказа также не зависит от цены
продукта.
13.4. Модель оптимального размера заказа с дефицитом
Предположим, что:
1) темп спроса на товар известен и постоянен;
2) время выполнения заказа известно и постоянно;
3) закупочная цена не зависит от размера заказа.
И с х о дн ые да н н ы е : темп спроса, издержки заказа, издержки хранения,
издержки дефицита.
Р е з у л ь та т : оптимальный размер заказа, время между заказами, точка
восстановления запаса, совокупные издержки.
Размер заказа является постоянным. Уровень запасов убывает с
постоянной интенсивностью. Допускается дефицит продукта. После получения
заказа фирма компенсирует дефицит и восстанавливает запас продукта на
складе. Заказ делается тогда, когда дефицит продукта на складе достигает
оптимального размера. Оп ти м а л ь н ым
р е ше н и е м
з а да ч и будет такой
размер заказа Q*,при котором минимизируются общие издержки за период,
равные сумме издержек хранения, издержек заказа и издержек дефицита.
Динамика изменения количества продукта s на складе показана на рис. 13.
146
Рис. 13
Пусть Q – размер заказа;
Т – продолжительность периода планирования;
D, d – величина спроса за период планирования и в единицу времени
соответственно;
К – издержки одного заказа;
Н, h – удельные издержки хранения за период и в единицу времени
соответственно;
В, b – упущенная прибыль, возникающая вследствие дефицита одной
единицы продукта, за период и в единицу времени соответственно;
S – максимальный запас продукции;
L – время выполнения заказа.
Тогда:
– издержки заказа за период планирования;
JP-H – издержки хранения за период планирования;
– издержки дефицита за период планирования;
– совокупные издержки;
147
– оптимальный размер заказа;
–
оптимальный
максимальный
размер запаса;
Q* – S* – оптимальный максимальный дефицит;
R = dL – точка восстановления запаса.
13.5 Модель оптимального размера заказа с количественными скидками
Предположим, что:
1) темп спроса на товар известен и постоянен;
2) время выполнения заказа известно и постоянно.
И с х о дн ые да н н ы е : темп спроса, издержки заказа, издержки хранения,
цена товара, количественные скидки в случае закупки крупных партий товара.
Р е з у л ь та т : оптимальный размер заказа, время между заказами, точка
восстановления запаса, количество заказов за фиксированный период времени,
совокупные издержки.
Пусть Q – размер заказа;
Т – продолжительность периода планирования;
D, d – величина спроса за период планирования и в единицу времени
соответственно;
К – издержки одного заказа;
H, h – удельные издержки хранения за период и в единицу времени
соответственно.
Предположим, что известны числа сi, ai, i = 1, ..., п, где сi – цена продукта
при размере заказа Q в интервале ai-1 ≤ Q < аi. Будем считать, что а0 = 0 и ап =
+∞.
Тогда:
148
– издержки заказа за период планирования;
– издержки хранения за период планирования;
сiD – издержки на закупку товара.
О п ти м а л ьн ый
размер
з а к а з а определяется
в
результате
решения n задач. Каждая из этих задач сводится к определению такого размера
заказа Qi, i =
1,
..., п, при
издержек
1
котором
функция
совокупных
(общих)
достигает минимума при ограничениях аi-
≤ Qi < ai.
Решение исходной задачи определяется из условия
На рис. 14 изображены функции совокупных издержек для трех значений
цен продукта. Значение цены с1 определено на интервале0 ≤ Q < а1, цены с2 – на
интервале a1 ≤ Q < a2, цены c3 – на интервале а2 ≤ Q < +∞.
Рис. 14
Соответственно, функция общих издержек С1(Q) определена при значении
цены с1 на
интервале 0
≤ Q < a1 функция – при
149
значении
цены с2 на
интервале а1 Q < а2 функция C3(Q)
– при
значении
цены с3 на
интервале а2 ≤ Q < +∞.
Минимальное значение функции C1(Q) в области ее допустимых значений
достигается в точке Q1, функции С2(Q) – в точке а1, функции C3(Q) – в точке а2.
Оптимальный размер заказа следует выбирать из величин Q1, a1 и а2 по
формуле
14 СТОХАСТИЧЕСКАЯ МОДЕЛЬ
14.1 Дискретная стохастическая модель оптимизации начального запаса
Мы
отказываемся
от
предположения
о
постоянстве
и
детерминированности величины спроса на товар и предполагаем известным
распределение величины спроса.
Пусть S – размер запаса на начало периода планирования;
D – величина спроса за период планирования (целое число);
Н – удельные издержки хранения за период;
В – удельные издержки дефицита за период;
p(D) – вероятность того, что величина спроса за период планирования
составит D.
Функция распределения величины спроса
.
В случае, когда величина спроса за период планирования превышает
размер запаса (D > S), возникает дефицит и соответствующие издержки
дефицита. Если запас больше, чем величина спроса (S > D), то возникают
издержки хранения. Математическое
ожидание С1(S) величины издержек
хранения за период планирования для размера начального запаса S можно
оценить следующим образом:
150
.
Математическое ожидание C2(S) величины издержек дефицита за период
планирования для размера начального запаса S можно оценить следующим
образом:
.
Математическое ожидание C(S) совокупных издержек в этом случае имеет
вид C(S) = C1(S) + C2(S).
В
стохастической
модели о п ти м а л ьн ым является
такой
размер
начального запаса S*, при котором математическое ожидание совокупных
издержек C(S*) имеет
минимальное
значение,
т.е.
такой
размер
запаса S*, который удовлетворяет условию
Если
то
и оптимальными
являются как размер запаса S* так и размер запаса S* + 1.
14.1 Примеры
Пример 1
Продажа автомобилей.
Андрей Удачливый, торговый агент компании Volvo, занимается продажей
последней модели этой марки автомобиля. Годовой спрос на эту модель
оценивается в 4000 единиц. Цена каждого автомобиля равна 90 тыс. руб., а
годовые издержки хранения составляют 10% от цены самого автомобиля.
Анализ показал, что средние издержки заказа составляют 25 тыс. руб. на заказ.
Время выполнения заказа – 8 дней. Ежедневный спрос на автомобили равен 20.
151
Вопросы
1. Чему равен оптимальный размер заказа?
2. Чему равна точка восстановления?
3. Каковы совокупные издержки?
4. Каково оптимальное количество заказов в год?
5. Каково оптимальное время между двумя заказами, если предположить,
что количество рабочих дней в году равно 200?
Решение:
Исходные данные:
– величина спроса D = 4000 единиц;
– издержки заказа К = 25 тыс. руб.;
– издержки хранения Н = 9/200 тыс. руб.;
– цена за единицу с = 90 тыс. руб.;
– время выполнения заказа L = 8 дней;
– ежедневный спрос d = 20 единиц;
– число рабочих дней T = 200.
Используя простейшую модель оптимального размера заказа,
получаем:
размер заказа Q = 149 единиц;
точка восстановления R = 160 единиц;
число заказов за год N = 26,83;
совокупные издержки С = 1341 тыс. руб.;
стоимость продаж c D = 360 млн. руб.;
число дней между заказами t = 7,45.
Пример 2
Поставка
товара
с
фиксированным
времени.
152
интервалом
Магазин «Лада» закупает духи «Ландыш» на одной из парфюмерных
фабрик. Годовой спрос на этот продукт составляет 600 шт. Издержки заказа
равны 850 руб., издержки хранения – 510 руб. за одну упаковку (20 шт.) в год.
Магазин заключил договор на поставку с фиксированным интервалом времени.
Количество рабочих дней в году – 300. Время поставки товара – 6 дней.
Стоимость одного флакона – 135 руб.
Вопросы
1. Чему равно оптимальное число заказов в течение года?
2. Чему равна точка восстановления запаса?
3. Каковы минимальные совокупные издержки?
Решение:
Оптимальный размер заказа
шт.
Число
заказов
в
течение
года
Поскольку
среднесуточный спрос равен 600/300 = 2 шт., точка восстановления запаса
составит
2´6
=
12
шт.
Минимальные
хранения
издержки
заказа
и
руб.
Ответы: 1. 3. 2. 12 шт. 3. 5100 руб.
Пример 3
Производство деталей.
На первом станке производятся детали в количестве 12 000 единиц в год.
Эти детали используются для производства продукции на втором станке
производительностью 3600 единиц в год. Оставшиеся детали образуют запас.
Издержки хранения составляют 0,5 руб. за одну деталь в год. Стоимость
производственного цикла на первом станке равна 800 руб. Определите
оптимальный размер партии на первом станке.
153
Решение:
Оптимальный размер партии
шт.
Пример 4
Планирование дефицита.
Вернемся к примеру 2 и рассмотрим вариант планирования дефицита.
Допустим, по оценке менеджера, упущенная прибыль, связанная с отсутствием
товара и утратой доверия клиентов, составляет 20 руб. в год за один флакон
духов «Ландыш» при условии, что издержки заказа и хранения остаются без
изменения. Определите оптимальный размер заказа при плановом дефиците.
Нужно ли менеджеру вводить систему с плановым дефицитом?
Решение:
Оптимальный размер заказа
шт.
Максимальный размер запаса за один цикл
шт.
Совокупные издержки
руб.
Совокупные издержки при плановом дефиците меньше издержек без
дефицита на 1718,7 руб. Следовательно, целесообразно ввести систему с
плановым дефицитом.
Пример 5
Продажи со скидками.
154
Магазин «Медвежонок» продает игрушечные гоночные машинки. В
зависимости от размера заказа фирма предлагает скидки:
Издержки заказа составляют 49 руб. Годовой спрос на машинки равен
5000. Годовые издержки хранения в процентном отношении к цене составляют
20%. Найдите размер заказа, минимизирующий общие издержки.
Решение:
Рассчитаем Q* для каждого вида скидок: Q1*= 700 Q2* = 714, Q3* = 718.
Так как Q1* находится в интервале между 0 и 1000, то его необходимо
взять равным 700. Оптимальный объем со скидкой Q*2меньше количества,
необходимого для получения скидки, следовательно, его необходимо принять
равным 1000 единиц. Аналогично Q3* берем равным 2000 единиц.
Получим: Q1* = 700 Q2* =1000, Q3* = 2000.
Далее необходимо рассчитать общие издержки для каждого размера заказа
и вида скидок, а затем выбрать наименьшее значение. Расчеты приведены в
следующей таблице:
Выберем
тот
размер
заказа,
который
минимизирует
общие
годовые издержки. Из таблицы видно, что заказ в размере 1000 игрушечных
машинок будет минимизировать совокупные издержки.
Пример 6
Создание запаса продукции при дискретном спросе.
155
Небольшой салон специализируется на продаже видеомагнитофонов
стоимостью 2000 руб. Затраты на хранение единицы продукции составляют 500
руб. Изучение спроса, проведенное в течение месяца, дало следующее
распределение числа покупаемых видеомагнитофонов:
Найдите оптимальный размер запаса.
Решение:
Доказано, что при дискретном случайном спросе суммарные затраты
минимальны при размере запаса S*, удовлетворяющем неравенству
– плотность убытков, F(S) = p(D < S) – функция распределения величины
спроса. Вычислим плотность убытков:
Найдем значения функции распределения величины спроса:
Оптимальный размер запаса продукции удовлетворяет неравенству F(6) <
0,8 < F(7). Следовательно, размер запаса в 6 единиц будет оптимальным.
15 МОДЕЛИ СИСТЕМ МАССОВОГО ОБСЛУЖИВАНИЯ
15.1 Цели
156
Основы знаний об очередях, иногда называемые теорией очередей или
теорией массового обслуживания, составляют важную часть теории управления
производством. Очереди – обычное явление. Они могут носить форму
ожидания ремонта автомобиля в центре автосервиса или ожидания студентами
консультации у профессора. В таблице перечислены некоторые примеры
возникновения очередей в системах массового обслуживания:
Модели очередей (как и линейное программирование, модели 1
управления запасами, методы сетевого анализа проектов) используются и в
сфере управления материальным производством, и в 1 сфере обслуживания.
Анализ очередей в терминах длины очереди, среднего времени ожидания,
среднего времени обслуживания и других факторов помогает нам лучше понять
принципы организации системы обслуживания. Ожидание пациента в
приемной врача и ожидание починки сломанной дрели в ремонтной мастерской
имеют много общего с точки зрения управления процессом обслуживания. Оба
процесса используют человеческие ресурсы и ресурсы оборудования для
удовлетворения
потребностей
клиентов.
Профессиональный
менеджер,
принимая решение о совершенствовании системы массового обслуживания,
оценивает изменения, возникающие в затратах на функционирование системы и
в издержках, связанных с ожиданием клиентов. Можно нанять большое
количество сотрудников, которые будут быстро обслуживать клиентов. Так,
администратор супермаркета может уменьшить очереди в кассы, увеличивая в
часы пик количество продавцов и кассиров. Для работы в кассах банков или
аэропортов в час пик могут быть привлечены дополнительные сотрудники.
Однако снижение времени ожидания обычно сопряжено с издержками на
157
создание и оснащение рабочих мест, с оплатой труда дополнительного
персонала. Эти издержки могут быть весьма значительны.
Можно сэкономить на трудозатратах. Но тогда клиент может не дождаться
обслуживания или потерять охоту вернуться еще раз. В последнем случае
система массового обслуживания будет нести потери, которые можно назвать
издержками ожидания. В некоторых системах обслуживания, например в
скорой помощи, затраты, связанные с длительным ожиданием, могут оказаться
чрезвычайно высокими. Основной экономический принцип совершенствования
систем массового обслуживания состоит в оценке общих ожидаемых затрат,
включающих затраты на обслуживание и потери, которые несет система в
результате ожидания клиента.
После того как вы выполните задания, предлагаемые в этой главе, вы
будете уметь определять и использовать для экономического анализа
следующие понятия:
· система массового обслуживания;
· заявка;
· очередь;
· темп поступления заявок;
· темп обслуживания;
· среднее время, которое заявка проводит в очереди;
· средняя длина очереди;
· среднее время, которое заявка проводит в системе обслуживание;
· среднее число клиентов в системе обслуживания;
· издержки функционирования системы обслуживания;
· издержки ожидания.
15.2 Модели
Классификационные признаки систем массового обслуживанияВ системах массового обслуживания различают три основных этапа,
которые проходит каждая заявка:
158
1) появление заявки на входе в систему;
2) прохождение очереди;
3) процесс обслуживания, после которого заявка покидает систему.
На каждом этапе используются определенные характеристики, которые
следует обсудить прежде, чем строить математические модели.
Характеристики входа:
1) число заявок на входе (размер популяции);
2) режим поступления заявок в систему обслуживания;
3) поведение клиентов.
Число заявок на входе:
Число потенциально возможных заявок (размер популяции) может
считаться либо бесконечным (неограниченная популяция), либо конечным
(ограниченная популяция). Если число заявок, поступивших на вход системы с
момента начала процесса обслуживания до любого заданного момента времени,
является лишь малой частью потенциально возможного числа клиентов,
популяция
на
входе
рассматривается
как н е о г р а н и ч е н н а я . Примеры
неограниченных популяций: автомобили, проходящие через пропускные
пункты на скоростных дорогах, покупатели в супермаркете и т.п. В
большинстве
моделей
очередей
на
входе
рассматриваются
именно
неограниченные популяции.
Если количество заявок, которые могут поступить в систему, сравнимо с
числом заявок, уже находящихся в системе массового обслуживания,
популяция
считается о г р а н и ч е н н о й . Пример
ограниченной
популяции:
компьютеры, принадлежащие конкретной организации и поступающие на
обслуживание в ремонтную мастерскую.
Р е ж и м п о с т у п л е н и я з а яв о к в с и с те м у о б с л у ж и в а н и я . Заявки
могут поступать в систему обслуживания в соответствии сопределенным
графиком (например, один пациент на прием к стоматологу каждые 15 мин, один
автомобиль на конвейере каждые 20 мин) или случайным образом. Появления
клиентов считаются с л у ч а й н ым и , если они независимы друг от друга и точно
159
непредсказуемы. Часто в задачах массового обслуживания число появлений в
единицу
времени
может
быть
оценено
с
помощью
пуассоновского
распределения вероятностей. При заданном темпе поступления (например, два
клиента в час или четыре грузовикав минуту) дискретное распределение
Пуассона описывается следующей формулой:
где р (х) – вероятность поступления х заявок в единицу времени;
х – число заявок в единицу времени;
λ – среднее число заявок в единицу времени (темп поступления заявок);
е = 2,7182 – основание натурального логарифма.
Соответствующие значения вероятностей р(х) нетрудно определить с
помощью таблицы пуассоновского распределения. Если, например, средний
темп поступления заявок – два клиента в час, то вероятность того, что в течение
часа в систему не поступит ни одной заявки, равна 0,135, вероятность
появления одной заявки – около 0,27, двух – также около 0,27, три заявки могут
появиться с вероятностью 0,18, четыре – с вероятностью около 0,09 и т.д.
Вероятность того, что за час в систему поступят 9 заявок или более, близка
нулю.
На практике вероятности появления заявок, разумеется, не всегда
подчиняются пуассоновскому распределению (они могут иметь какое-то другое
распределение). Поэтому требуется проводить предварительные исследования
для того, чтобы проверить, что пуассоновское распределение может служить
хорошей аппроксимацией.
Поведение клиентов. Большинство моделей очередей основывается на
предположении, что поведение клиентов является стандартным, т.е. каждая
поступающая в систему заявка встает в очередь, дожидается обслуживания и не
покидает систему до тех пор, пока ее не обслужат. Другими словами, клиент
(человек или машина), вставший в очередь, ждет до тех пор, пока он не будет
обслужен, не покидает очередь и не переходит из одной очереди в другую.
160
Жизнь значительно сложнее. На практике клиенты могут покинуть очередь
потому, что она оказалась слишком длинной. Может возникнуть и другая
ситуация: клиенты дожидаются своей очереди, но по каким-то причинам
уходят необслуженными. Эти случаи также являются предметом теории
массового обслуживания, однако здесь не рассматриваются.
Характеристики очереди:
1) длина;
2) правило обслуживания.
Длина очереди:
Длина может быть ограничена либо не ограничена. Длина очереди
(очередь) о г р а н и ч е н а , если она по каким-либо причинам (например, из-за
физических ограничений) не может увеличиваться до бесконечности. Если
очередь достигает своего максимального размера, то следующая заявка в
систему
не
допускается
и
происходит
отказ.
Длина
очереди н е
о г р а н и ч е н а , если в очереди может находиться любое число заявок.
Например, очередь автомобилей на бензозаправке.
Правило обслуживания:
Большинство реальных систем использует правило «первым пришел –
первым ушел» (FIFO – first in, first out). В некоторых случаях, например в
приемном
покое
больницы,
в
дополнение
к
этому
правилу
могут
устанавливаться различные приоритеты.Пациент с инфарктом в критическом
состоянии, по-видимому, будет иметь приоритет в обслуживании по сравнению
с пациентом, сломавшим палец. Порядок запуска компьютерных программ –
другой пример установления приоритетов в обслуживании.
Характеристики процесса обслуживания:
1) конфигурация системы обслуживания (число каналов и число фаз
обслуживания);
2) режим обслуживания.
Конфигурация системы обслуживания:
161
Системы
обслуживания
различаются
по ч и с л у
каналов
о б с л у ж и в а н и я . Обычно количество каналов можно определить как число
клиентов, обслуживание которых может быть начато одновременно, например:
число
мастеров
в
парикмахерской.
обслуживания:
банк,
в
обслуживания
клиентов,
котором
или
Примерыо д н о к а н а л ьн о й системы
открыто
ресторан,
единственное
обслуживающий
окошко
для
клиентов
в
автомобилях. Если же в банке открыто несколько окошек для обслуживания,
клиент ожидает в общей очереди и подходит к первому освободившемуся окну,
то мы имеем дело с м н о г о к а н а л ьн о й однофазовой системой обслуживания.
Большинство банков, так же, как почтовые отделения и авиакассы, являются
многоканальными системами обслуживания.
Другая
характеристика
этапов) обслуживания одного
– число
ф а з (или
последовательных
клиента. О д н о ф а з о в ым и являются
такие
системы, в которых клиент обслуживается в одном пункте (на одном рабочем
месте), затем покидает систему. Ресторан для обслуживания автомобилей, в
котором официант получает деньги и приносит заказ в автомобиль, является
примером однофазовой системы. Если же в ресторане нужно сделать заказ в
одном месте, оплатить его в другом и получить пищу в третьем, то мы имеем
дело с м н о г о ф а з о в о й (три фазы) системой обслуживания.
На рис. 15 приведены системы обслуживания различной конфигурации.
162
Рис. 15
Режим обслуживания:
Как
и
режим
поступления
заявок,
режим
обслуживания
может
характеризоваться либо постоянным, либо случайным временем обслуживания.
При п о с то ян н о м времени на обслуживание любого клиента затрачивается
одинаковое время. Такая ситуация может наблюдаться на автоматической
мойке автомобилей. Однако более часто встречаются ситуации, когда время
обслуживания имеет с л у ч а й н о е распределение. Во многих случаях можно
предположить, что время обслуживания подчиняется экспоненциальному
распределению с функцией распределения
где p(t < τ) – вероятность того, что фактическое время обслуживания
заявки не превысит заданной величины τ;
163
μ – среднее число заявок, обслуживаемых в единицу времени;
е = 2,7182 – основание натурального логарифма.
Параметры моделей очередей
При анализе систем массового обслуживания используются технические и
экономические характеристики.
Наиболее часто используются следующие технические характеристики:
1) среднее время, которое клиент проводит в очереди;
2) средняя длина очереди;
3) среднее время, которое клиент проводит в системе обслуживания (время
ожидания плюс время обслуживания);
4) среднее число клиентов в системе обслуживания;
5) вероятность того, что система обслуживания окажется незанятой;
6) вероятность определенного числа клиентов в системе.
Среди экономических характеристик наибольший интерес представляют
следующие:
1) издержки ожидания в очереди;
2) издержки ожидания в системе;
3) издержки обслуживания.
Модели систем массового обслуживания
В зависимости от сочетания приведенных выше характеристик могут
рассматриваться различные модели систем массового обслуживания.
Здесь мы ознакомимся с несколькими наиболее известными моделями. Все
они имеют следующие общие характеристики:
а) пуассоновское распределение вероятностей поступления заявок;
б) стандартное поведение клиентов;
в) правило обслуживания FIFO (первым пришел – первым обслужен);
г) единственная фаза обслуживания.
I. Модель
А – модель
одноканальной
обслуживания М/М/1 с п у а с с о н о в с к им входным
иэ к с п о н е н ц и а л ьн ым временем обслуживания.
164
системы
потоком
массового
заявок
Наиболее
часто
встречаются
задачи
массового
обслуживания
с
единственным каналом. В этом случае клиенты формируют одну очередь к
единственному пункту обслуживания. Предположим, что для систем этого типа
выполняются следующие условия:
1. Заявки обслуживаются по принципу «первым пришел – первым
обслужен» (FIFO), причем каждый клиент ожидает своей очереди до конца
независимо от длины очереди.
2. Появления
заявок
являются
независимыми
событиями,
однако
среднее число заявок, поступающих в единицу времени, неизменно.
3. Процесс
поступления
заявок
описывается
пуассоновским
распределением, причем заявки поступают из неограниченного множества.
4. Время обслуживания описывается экспоненциальным распределением
вероятностей.
5. Темп обслуживания выше темпа поступления заявок.
Пусть λ – число заявок в единицу времени;
μ – число клиентов, обслуживаемых в единицу времени;
п – число заявок в системе.
Тогда система массового обслуживания описывается уравнениями,
приведенными ниже.
Формулы для описания системы М/М/1
– среднее число клиентов в системе;
– среднее время обслуживания одного клиента в системе
(время ожидания плюс время обслуживания);
– среднее число клиентов в очереди;
– среднее время ожидания клиента в очереди;
165
– характеристика загруженности системы (доля времени, в течение
которого система занята обслуживанием);
– вероятность отсутствия заявок в системе;
– вероятность
того,
что
в
системе
находится более
чем k заявок.
II. Модель
В – многоканальная
система
обслуживания M/M/S, многоканальной системе для обслуживания открыты два
канала или более. Предполагается, что клиенты ожидают в обшей очереди и
обращаются в первый освободившийся канал обслуживания.
Пример такой многоканальной однофазовой системы можно увидеть во
многих
банках:
из
общей
очереди
клиенты
обращаются
в
первое
освободившееся окошко для обслуживания.
В
многоканальной
системе
подчиняется п у а с с о н о в с к о м у закону,
а
поток
время
заявок
обслуживания
–
э к с п о н е н ц и а л ьн о м у .Приходящий первым обслуживается первым, и все
каналы обслуживания работают в одинаковом темпе. Формулы, описывающие
модель В, достаточно сложны для использования. Для расчета параметров
многоканальной системы обслуживания удобно использовать соответствующее
программное обеспечение.
Для
многоканальной
должно выполняться условие
системы
с
неограниченной
очередью
, где r – параметр загрузки системы
(среднее число занятых каналов), п – минимальное количество каналов, при
котором очередь не будет расти до бесконечности. В противном случае
предельные вероятности существовать не могут.
Формулы для описания системы M/M/S
166
– вероятность того, что система
свободна;
– вероятность того, что в системе находится п заявок;
– вероятность того, что заявка окажется в очереди;
– среднее число занятых каналов;
– среднее число заявок в очереди;
LS = Lq + r – среднее число заявок в системе;
– время нахождения заявки в очереди;
– время нахождения заявки в системе.
II. Модель С – модель с постоянным временем обслуживания M/D/1.
Некоторые
распределенное
системы
время
имеют постоянное, а
обслуживания.
В
таких
не
экспоненциально
системах
клиенты
обслуживаются в течение фиксированного периода времени, как, например, на
автоматической мойке автомобилей. Для модели С с постоянным темпом
обслуживания значения величин Lq и Wq вдвое меньше, чем соответствующие
значения в модели А, имеющей переменный темп обслуживания.
Формулы, описывающие модель С
–средняя длина очереди;
167
– среднее время ожидания в очереди;
– среднее число клиентов в системе;
– среднее время ожидания в системе.
IV. Модель D – модель с ограниченной популяцией.
Если
число
потенциальных
клиентов
системы
обслуживания ограничено, мы имеем дело со специальной моделью. Такая
задача может возникнуть, например, если речь идет об обслуживании
оборудования фабрики, имеющей пять станков.
Особенность этой модели по сравнению с тремя рассмотренными ранее в
том, что существует взаимозависимость между длиной очереди и темпом
поступления заявок.
V. Модель Е – модель с ограниченной очередью. Модель отличается от
предыдущих тем, что число мест в очереди о г р а н и ч е н о . Вэтом случае заявка,
прибывшая в систему, когда все каналы и места в очереди заняты, покидает
систему необслуженной, т.е. получает отказ.
Как
частный
случай
модели
с
ограниченной
очередью
можно
рассматривать модель с отказами, если количество мест в очереди сократить до
нуля.
Сравнительная характеристика различных моделей систем массового
обслуживания приведена в следующей таблице:
168
169
Министерство образования и науки Российской Федерации
ДАЛЬНЕГОРСКИЙ ИНДУСТРИАЛЬНОЭКОНОМИЧЕСКИЙ ИНСТИТУТ
(филиал) государственного образовательного
учреждения высшего профессионального
образования «Дальневосточный
государственный технический университет
(ДВПИ имени В.В.Куйбышева)»
МАТЕРИАЛЫ ПРАКТИЧЕСКИХ ЗАНЯТИЙ
Исследование операций
080502. 65 Экономика и управление на предприятии (по отраслям)
(очная / заочная форма обучения)
г. Дальнегорск
2010
170
СОДЕРЖАНИЕ ПРАКТИЧЕСКИХ ЗАНЯТИЙ
Практическая
работа
№1.
Приведение
общей
задачи
линейного
программирования к канонической форме.
Практическая работа №2. Решение задач линейного программирования
графическим методом.
Практическая работа №3. Решение задач линейного программирования
симплексным методом.
Практическая
работа
№4.
Составление
математических
моделей
двойственных задач.
Практическая
работа
№5.
Транспортная
задача
линейного
программирования.
Практическая работа №6. Решение транспортных задач методом потенциалов.
Практическая работа №7. Решение транспортных задач с ограничением на
пропускную способность и по критерию времени.
Практическая работа №8. Решение задач методом Гомори.
Практическая работа №9. Решение задач нелинейного программирования.
ПРИМЕРЫ СОДЕРЖАТЕЛЬНЫХ ПОСТАНОВОК ЗАДАЧ ЛИНЕЙНОГО
ПРОГРАММИРОВАНИЯ
Задача №1
Задача об оптимальном использовании ресурсов. Для изготовления
двух
видов
продукции
используются
четыре
вида
ресурсов: В1, В2, В3, В4. Имеющиеся запасы ресурсов различных видов, а также
затраты на изготовление единицы каждого из двух видов продукции приведены
в табл. 1.4.1.
171
Таблица 1
Задача об оптимальном использовании ресурсов
Число единиц ресурсов,
Вид ресурса
Запас ресурса
затрачиваемых на изготовление единицы продукции
Первый
Второй
вид продукции
вид продукции
В1
18
1
3
В2
16
2
1
В3
5
–
1
В4
21
3
–
На производство единицы продукции I-го и II-го видов используется
различное количество ресурсов. Так, например, на производство единицы
продукции I-го вида используется только одна единица ресурса В1, а на
производство
единицы
продукцииII-го
вида
используются
3
единицы
ресурса В1 на производство единицы продукции I-го вида используются 2
единицы ресурса В2, а на производство единицы продукции II-го вида
используется 1 единица ресурса В2, в то же время на производство продукции Iго вида ресурс В3 вообще не используется, а на производство продукции II-го
вида не используется ресурс В4.
Выручка, получаемая предприятием от продажи единицы продукции первого
и второго видов, составляет соответственно 2 руб. и 3 руб.
Необходимо составить такой план производства продукции первого и
второго видов, при котором выручка предприятия от ее реализации будет
максимальной.
Составим экономико-математическую модель задачи.
Пусть x1 – число единиц продукции первого вида, которое запланировано к
производству;
x2 – число единиц продукции второго вида, которое запланировано к
производству.
На их изготовление предприятию потребуется:
172
x1 + 3 х2 единиц ресурса В1;
2x1 + х2 единиц ресурса В2;
х2 единиц ресурса В3;
3x1 единиц ресурса В4.
Так как потребление ресурсов не должно превышать их запасов, то связь
между потреблением ресурсов и их запасами выразится системой ограничений:
x1 + 3 х2 ≤ 18,
2x1 + х2 ≤ 16,
(6)
x1 ≥ 0, x2 ≥ 0,
(7)
х2 ≤ 5,
3x1 ≤ 21.
По смыслу задачи:
Так как количество выпускаемой продукции как первого, так и второго
вида не может быть отрицательным.
Выручка от реализации продукции первого вида составит 2x1, а от
реализации продукции второго вида – 3 х2, таким образом, суммарная выручка
от реализации обоих видов продукции составит:
F = 2x1 + 3x2 -> max
(8)
Требуется найти такой план выпуска продукции X = (х1, х2), который
удовлетворял бы ограничениям (6) и (7) и при котором целевая функция F (8)
принимала бы максимальное значение.
Эту задачу легко обобщить на n видов продукции и m видов ресурсов.
Обозначим через:
xj – число единиц j-го вида продукции (j = 1, ... , n), запланированной к
производству;
bi – запас i-го ресурса (i =1, ..., т);
aij – число единиц ресурса i, затрачиваемого на изготовление единицы
продукции j-го вида (aij часто называют технологическими коэффициентами);
cj – выручка от реализации единицы продукции j-го вида (или цена
продукции j-го вида) (j = 1, ..., n).
173
Тогда экономико-математическая модель задачи об использовании
ресурсов в общей постановке примет вид: найти такой план
Х = (х1, х2,
..., хn) выпуска продукции, который удовлетворял бы системе ограничений:
и при котором целевая функция достигала бы своего максимального
значения:
Задача № 2
Транспортная задача линейного программирования. Пусть имеется
несколько пунктов отправления, в которых сосредоточены запасы какого-либо
однородного товара в определенных количествах, несколько пунктов
назначения, которые хотят получить этот товар в определенных количествах.
Известно, что сумма заявок на получение груза из всех пунктов назначения
равна сумме запасов товара, находящегося во всех пунктах отправления.
Известна стоимость перевозки единицы товара от каждого пункта отправления
до каждого пункта назначения.
Требуется составить такой план перевозок, в котором:
· все грузы из всех пунктов отправления были бы вывезены;
· заявки всех пунктов назначения были бы удовлетворены;
· суммарные затраты на перевозку были бы минимальны. Рассмотрим
конкретный пример.
Пусть имеется:
174
· три пункта отправления: города под названием А1, А2, А3, в которых
сосредоточены запасы какого-либо товара (например, машин) соответственно в
количестве а1 = 10, а2 = 20, а3 = 30;
· три пункта назначения: города под названием B1, B2, B3, в которых
сосредоточены потребители товара (машин), желающие получить его в
количестве b1 = 10, b2 = 10, b3 = 40;
· установлено, что сумма заявок всех городов-потребителей товара равна
суммарному количеству товара, имеющегося в городах – поставщиках этого
товара, т.е.:
известна стоимость перевозки одной единицы товара (одной машины) из
пункта отправления Ai в пункт назначения Bj, т.е. задана матрица стоимостей
перевозок:
Требуется составить такой план перевозок, при котором весь имеющийся
запас товара из всех городов-поставщиков, являющихся пунктами отправления,
был вывезен, все заявки городов-потребителей удовлетворены, а стоимость
перевозок всего товара, который перевозится от поставщиков к потребителям,
была бы минимальна. Вся вышеперечисленная информация представлена в
табл. 1.4.2.
Таблица 2
Транспортная задача
10
20
50
а1 = 10
A1
40
60
90
а2 = 20
A2
175
30
80
70
а3 = 30
b1 = 10
b2 = 10
b3 = 40
60
B1
B2
B3
A3
Перейдем к математической формулировке этой задачи. Обозначим
через хij – количество товара, который перевозится из пункта отправления Аi; в
пункт назначения Bj (1 ≤ i ≤ 3, 1 ≤ j ≤ 3).
Сформируем для рассматриваемой задачи систему ограничений.
Первое содержательное ограничение состоит в том, что сумма товаров,
содержащихся во всех пунктах отправления, должна равняться сумме заявок на
доставку этих товаров, которые подали все пункты назначения. Математически
это означает, что должно выполняться уравнение:
Второе содержательное ограничение в данной задаче – все товары,
имеющиеся в каждом из пунктов отправления, должны быть вывезены,
возможно, в различные пункты назначения. Математически это означает, что
должны выполняться следующие равенства:
Третье содержательное ограничение - суммарное количество товара,
доставляемого в каждый пункт назначения изо всех пунктов отправления,
должно быть равно заявке, поданной данным пунктом. Математически это
означает, что должны выполняться следующие неравенства:
176
Четвертое ограничение предполагает, что перевозимые товары не могут
принимать отрицательные значения, т.е. хij ≥ 0.
Цель задачи состоит в минимизации перевозок. Математически это
означает, что целевая функция
Таким образом, математически задача состоит в нахождении такого плана
перевозок Х = (х11, х12, ..., х33), который удовлетворял бы системе ограничений и
доставлял бы минимум целевой функции.
Отличительные
особенности
экономико-математической
модели
транспортной задачи:
система ограничений представляет собой систему уравнений;
в системе ограничений коэффициенты при переменных принимают
только два возможных значения: либо 0, либо 1;
каждая переменная входит в систему ограничений два раза.
Для математической формулировки транспортной задачи в общем виде
введем следующие обозначения:
т – количество пунктов отправления, в которых сосредоточены товары;
ai – количество товара, сосредоточенного в пункте отправления Аi, (z = 1,
..., т);
п – количество пунктов назначения, в которые должны быть перевезены
товары;
bj – количество товара, которое заявлено пунктом Bj (j = 1,... , и);
сij – стоимость перевозки единицы товара из пункта i в пункт j.
В этом случае система ограничений примет вид:
177
а линейная функция – критерий
В этой задаче необходимо найти такой вектор Х = (х11, х12, ..., хmn), который
удовлетворял бы построенной системе ограничений и доставлял бы минимум
целевой функции.
Важной особенностью данной постановки задачи является соблюдение
баланса между количеством товара, которое хотят приобрести по заявкам все
пункты назначения, и количеством груза, имеющегося во всех пунктах
отправления. Такие транспортные задачи называются закрытыми. При
несоблюдении этого условия транспортные задачи называются открытыми.
Будучи задачей линейного программирования, транспортная задача может
быть
решена
симплекс-методом.
Однако
в
силу
отмеченных
выше
особенностей для нахождения ее оптимального решения могут быть применены
и специальные методы решения (например, метод потенциалов).
178
Задача № 3
Задача использования ресурсов. При производстве п видов продукции
используется т видов ресурсов.
Известно:
b1, b2, ...,bт – запасы ресурсов;
aij (i = 1, 2, ..., т; j = 1, 2, ..., п) – расход каждого i-гo вида ресурса на
изготовление единицы j-й продукции
с;(j = 1, 2, ..., п) – прибыль, получаемая при реализации единицы j-й
продукции.
Составить план выпуска продукции, обеспечивающий максимальную
прибыль.
Решение:
Обозначим вектор переменных задачи:
X = (х1, х2, ..., хп), где xj (j = 1,2, ..., п) – объем выпуска j-й продукции.
Учитывая, что CjXj– прибыль от реализации всего объема j-й продукции, aijxj –
затраты i-го вида ресурса на весь объем выпуска j-ой продукции, запишем
математическую модель задачи.
Кроме того, необходимо учитывать неотрицательность переменных
задачи, так как объем выпуска продукции не может быть отрицательным.
Таким образом, математическая модель имеет вид:
Задача № 4
179
Задача о составлении рациона питания. Животные должны получать
ежедневно т питательных веществ в количестве не менее b1, b2, ..., bт. В рацион
животных входят корма п видов.
Известно:
aij (i = 1, 2, ..., т; j = 1, 2, ..., п) – содержание i-гo питательного вещества в
единице j-го вида корма;
Cj (j = 1, 2, ..., n) – стоимость единицы j-го вида корма. Составить
суточный рацион кормления животных, обеспечивающий минимальные
затраты.
Решение:
Введем переменные задачи:
X = (х1, х2, ..., хп), где xj (j = 1,2, ..., п) – объем j-го вида корма, входящего в
суточный рацион. Так как aijхj, — количество i-го питательного вещества,
содержащегося в ум виде корма, входящего в суточный рацион, сjхj – стоимость
j-го корма, то математическая модель имеет вид:
Составить математические модели следующих задач:
1. При производстве двух видов продукции используются три вида сырья.
Составить план выпуска продукции, обеспечивающий максимум прибыли.
Исходные данные таковы:
180
а
а)
Запасы
сырья
Расход сырья на
б)
Запасы
единицу продукции
№1
№2
30
1
3
48
4
60
Прибыль
сырья
Расход сырья на
единицу продукции
№1
№2
20
2
1
3
12
1
1
3
3
30
1
3
70
60
Прибыль
40
50
2. В рационе животных используется два вида кормов. Животные должны
получать три вида веществ. Составить рацион кормления, обеспечивающий
минимальные затраты. Исходные данные таковы:
а)
Необходимое
количество
питательного
вещества
Содержание
б)
питательного
количество
вещества
питательного
в единице корма
№1
№2
15
5
1
12
2
7
Стоимость
единицы
корма
Необходимое
вещества
Содержание
питательного
вещества
в единице корма
№1
№2
12
2
1
1
10
1
1
1
1
24
2
3
40
30
Стоимость
единицы
корма
60
60
181
Задача № 5
Решить задачу линейного программирования
Решение:
Строим область допустимых решений задачи. Нумеруем ограничения
задачи. В прямоугольной декартовой системе координат (рис. 2) строим
прямую х1 – х2 + 2 = 0 (L1), соответствующую ограничению (1). Находим, какая
из двух полуплоскостей, на которые эта прямая делит всю координатную
плоскость, является областью решений неравенства (1). Для этого достаточно
координаты какой-либо точки, не лежащей на прямой, подставить в
неравенство. Так как прямая L1 не проходит через начало координат,
подставляем координаты точки О (0, 0) в первое ограничение 1*0-1*0 + 2 ≥ 0.
Получаем строгое неравенство 2 ≥ 0. Следовательно, точка О лежит в
полуплоскости решений. Таким образом, стрелки на концах прямой L1 должны
быть направлены в полуплоскость, содержащую точку О. Аналогично строим
прямые Зх1 – 2х2 – 6 = 0 (L2), 2х1 + х2 – 2 = 0 (L3), х2 = 3 (L4) и области решений
ограничений (2), (3) и (4). Находим общую часть полуплоскостей решений, учитывая при этом условия неотрицательности; полученную область допустимых
решений отметим на рис. 2 штриховкой.
182
Рис. 2
Строим нормаль линий уровня п = (3, 2) и одну из этих линий,
например 3х1 + 2х2 = 0. Так как решается задача на отыскание максимума
целевой функции, то линию уровня перемещаем в направлении нормали до
опорной прямой. Эта прямая проходит через точку X* пересечения прямых,
ограничивающих
область
допустимых
решений
и
соответствующих
неравенствам (2) и (4). Определяем координаты точки X* = L2 ∩ L4. Решая
систему
Получаем X* = (4, 3). Вычисляем Z(X*) = 3 ∙ 4 + 2 ∙ 3 = 18.
О т в е т : max Z(X) = 18 при X* = (4, 3).
183
Задача № 6
Решение:
Строим область допустимых решений, нормаль линий уровня п = (4, 2) и
одну из линий уровня, имеющую общие точки с этой областью (рис. 3).
Перемещаем линию уровня в направлении, противоположном направлению
нормали п, так как решается задача на отыскание минимума функции. Нормаль
линий уровня п = (4, 2) и нормаль п2 = (2, 1) граничной прямой L2, в
направлении которой перемещаются линии уровня, параллельны, так как их
координаты пропорциональны (4:2 = 2:1). Следовательно, опорная прямая
совпадает с граничной прямой L2 области допустимых решений и проходит
через две угловые точки этой области X*1 и Х*2. Задача имеет бесконечное
множество оптимальных решений, являющихся точками отрезка [X*1, X*2]. Эти
точки X*2 = L1 ∩ L2, находим, решая соответствующие системы уравнений:
Вычисляем
184
Рис. 3
О т в е т : min Z(X) = 12 при X* = (1 – t) X*1 + tX*2 , 0 ≤ t ≤ 1.
185
Задача № 7
Решение:
Строим область допустимых решений, нормаль п = (3, 7) и одну из линий
уровня (рис. 4).
Рис. 4
В данной задаче необходимо найти максимум целевой функции, поэтому
линию уровня перемещаем в направлении нормали. Ввиду того что в этом
направлении область допустимых решений не ограничена, линия уровня уходит
в бесконечность. Задача не имеет решения вследствие неограниченности
целевой функции.
О т в е т : Z(X)-> ∞.
Задача № 8
186
Решение:
Строим
прямые
линии,
соответствующие
неравенствам
системы ограничений и находим полуплоскости, являющиеся областями
решений этих неравенств (рис. 5).
Рис. 5
Область допустимых решений задачи является пустым множеством.
Задача не имеет решения ввиду несовместности системы ограничений.
Ответ: система ограничений несовместна.
Задача № 9
187
Опорное решение задачи линейного программирования. Найти
начальное опорное решение и путем перебора опорных решений определить
оптимальное решение задачи линейного программирования
Решение:
Результаты
нахождения
начального
опорного
решения
и
дальнейшего перебора опорных решений приведены в табл. 3. В правой части
таблицы на каждом шаге вычислений приведены значения параметра θк для
различных
шрифтом),
столбцов k (минимальные
соответствующее
опорное
значения θok выделены
жирным
решение Xi и
целевой
значение
функции Z(Xi) на этом решении. Номера столбцов для выбора разрешающих
элементов принимались произвольно.
Таблица 3
Сравниваем
значения
целевой
функции
на
полученных
опорных
решениях: min {-1, 5, 7, 7} = -1. Делаем вывод, что оптимальным решением
является X1 = (0, 0, 3,4).
О т в е т : min Z(X) = -1 при X* = (0, 0, 3, 4).
Задача № 10
188
Решить симплексным методом
Решение:
Приводим задачу к каноническому виду. Для этого в левую часть второго и
третьего
ограничений-неравенств
типа
«≤»
вводим
дополнительные
переменные х5 и х6 с коэффициентом +1. В целевую функцию х5 и х6 входят с
коэффициентом 0 (т.е. не входят). Получаем
Система
ограничений
этой
задачи
является
системой
уравнений,
разрешенной относительно переменных х4, х5, х6. Свободные (неразрешенные)
переменные приравниваем к нулю: х1 = х2 = х3 = 0. Получаем х4 = 6, х5 = х6 = 10.
Записываем базисное решениеХ1 = (0, 0, 0, 6, 10, 10), которое является начальным
опорным решением с базисом Б1 = (А4, А5, Л6).
По формуле (21) вычисляем оценки разложений векторов условий по
базису опорного решения:
−1
1
∆1 = Сб Х1 − с1 = ( 0 ) ∙ (1)-1=(-1)∙1+0∙1+0∙2-1=-2
0
2
−1
1
∆2 = Сб Х2 − с2 = ( 0 ) ∙ (2)-1=(-1)∙1+0∙2+0∙1-1=-2
0
1
189
−1
2
∆3 = Сб Х3 − с3 = ( 0 ) ∙ (1)-1=(-1)∙2+0∙1+0∙1-1=-3
0
1
Оценки для векторов, входящих в базис, всегда равны нулю.
Опорное решение, коэффициенты разложений и оценки разложений
векторов условий по базису опорного решения записываются в симплексную
таблицу (табл. 4).
Таблица 4
Для
удобства
вычислений
оценок
над
таблицей
записываются
коэффициенты целевой функции. В первом столбце «Б» записываются векторы,
входящие в базис опорного решения. Порядок записи этих векторов
соответствует номерам разрешенных неизвестных в уравнениях-ограничениях.
Во втором столбце таблицы «Сб» записываются коэффициенты целевой
функции при базисных переменных в том же порядке. При правильном
расположении коэффициентов целевой функции в столбце «Сб» оценки
единичных векторов, входящих в базис, всегда равны нулю. В последней
строке таблицы с оценками Δk в столбце «А0» записывается значение целевой
функции на опорном решении Z(X1).
Начальное опорное решение не является оптимальным, так как в
рассматриваемой задаче на максимум векторам A1, A2 и А3 соответствуют
отрицательные оценки Δ1 = -2, Δ2 = -2, Δ3 = -3 (не выполняется признак
оптимальности).
В данном случае можно найти новое опорное решение, на котором
значение целевой функции будет больше. Определим, введение какого из трех
векторов приведет к большему приращению целевой функции. Приращение
целевой функции находится по формуле (30.5). Вычисляем значения параметра
190
θ0А для первого, второго и третьего векторов по формуле (30.4). Получаем θ01= 5
при l= 3;θ
02=
5 при l=2; θ03= 3 при l= 1 (см. табл. 2). Находим возможные
приращения целевой функции при введении в базис каждого из этих векторов и
определяем наибольшее из них:
Следовательно, для более быстрого приближения к оптимальному
решению необходимо ввести в базис опорного решения либо вектор A1, либо
вектор А2. Вводим в базис вектор А1. Так как минимальное значение θ01=5
достигается при l = 3, то исключаем из базиса третий вектор А6. За
разрешающий элемент принимаем число 2, расположенное в первом столбце и
третьей строке. Выполняем преобразование Жордана с элементом х31 = 2.
Получаем
второе
опорное
решение Х2 = (5,
0,
0,
1,
5,
0)
с
базисом Б2 = (А4,А5, А1), Z(X2) = 4 (табл.5).
Таблица 5
Это решение не является оптимальным, так как векторы А2 и А3 имеют
отрицательные оценки Δ2 = -1, Δ3 = -2. Определяем, введение какого из
векторов А2 или А3 в базис опорного решения приведет к большему приращению
целевой функции:
Вводим в базис вектор А2. Минимальное значение параметра θ02 = 2 имеет
место при l = 1, поэтому разрешающий элемент берем в первой строке. Из
базиса исключаем вектор А4. Выполняем преобразование Жордана с элементом х12
191
= 0,5. Получаем третье опорное решение Х3 = (4, 2, 0, 0, 2, 0) с базисом Б3 =
(А2, А5, A1), Z(X3) = 6 (табл. 6).
Таблица 6
Опорное решение Х3 является оптимальным, так как для всех векторов
условий оценки в задаче на максимум неотрицательные. Однако данное
решение не единственное, так как вектор А6, не входящий в базис, имеет
нулевую оценку. Этот вектор нужно ввести в базис опорного решения, чтобы
получить еще одно оптимальное решение. Вектор, выводимый из базиса,
находим с помошью параметра θ6. Так как θ06 = min {2, 4} = 2 при l = 2,
разрешающий элемент для следующего преобразования Жордана берем во
второй строке. В базис входит вектор A6 вместо вектора А5. Получаем второе
оптимальное решение Х4 = (2, 4, 0, 0, 0, 2) с базисом Б4 = (А2, А6, А1), Z(X4) = 6
(табл. 7).
Таблица 7
Исходная задача имела четыре переменные, поэтому в ответе в
оптимальном решении последние две дополнительные переменные не
записываем.
О т в е т : max Z(X) = 6 при X* = (1-t)X*1 + tX*2, 0 ≤ t ≤1
Задача № 11
192
Решить
методом
искусственного
базиса
задачу
линейного
программирования
Решение:
Составляем расширенную задачу. В левые части уравнений системы
ограничений
вводим
неотрицательные
искусственные
переменные
с
коэффициентом + 1 (всегда). Данная задача – задача на нахождение минимума,
поэтому x5 и x6 в целевую функцию вводятся с коэффициентом +М. Получаем
Приравниваем
свободные
переменные
системы
уравнений
(ограничений) к нулю: x1 = x2 = x3 = х4 = 0, получаем начальное опорное решение
расширенной задачи X1 = (0, 0, 0, 0, 3, 2) с базисом из единичных векторов Б1 =
(А5, А6). Вычисляем по формулам (30.8) оценки разложений векторов условий
по базису опорного решения и записываем в симплексную таблицу (табл. 8).
При этом оценки Δk и Z(X1) для удобства вычислений записываем в две строки:
в первую – слагаемые Δk, не зависящие от М, во вторую – слагаемые Δ''k(М),
зависящие от М. Значения Δ''k (М) удобно записывать без М, имея в виду,
однако, что оно там присутствует.
Таблица 8
193
Начальное опорное решение не является оптимальным, так как в задаче на
минимум
имеются
положительные
оценки.
Выбираем
номер
вектора Аk, вводимого в базис опорного решения, и вектора Аl, выводимого из
базиса. Для этого вычисляем приращения целевой функции ΔZk при введении в
базис каждого из векторов с положительной оценкой и находим минимум этого
приращения. При этом слагаемыми оценок Δ'к (без М) пренебрегаем до тех пор,
пока хотя бы одно слагаемое Δ''к(М) (с М) отлично от нуля. В связи с этим
строка со слагаемыми оценок Δ'к может отсутствовать в таблице до тех пор,
пока присутствует строка Δ''k(М). Находим
В столбце «А4» за разрешающий элемент выбираем коэффициент 2 в
первой строке и выполняем преобразование Жордана.
Вектор
А5,
выводимый
из
базиса,
исключаем
из
рассмотрения
(вычеркиваем). Получаем опорное решение Х2 = (0, 0, 0, 3/2, 0, 0.5) с
базисом Б2 = (А4,A6) (табл. 9).
194
Таблица 9
Данное решение не является оптимальным, так как векторы A1 и А3 имеют
положительные оценки Δ''1(М) = Δ''3(М)=1/2М. Введение в базис опорного
решения любого из этих векторов приведет к уменьшению целевой функции на
одну и ту же величинуΔZ1=ΔZ3= -1*(1/2)М = -М/2(слагаемыми без М
пренебрегаем). По своему усмотрению вводим в базис вектор A1, получаем
опорное решение Х3 = (1, 0, 0, 1, 0, 0) с базисом Б3 = (А4, A1) (табл. 10).
Таблица 10
Опорное решение Х3 не является оптимальным, так как вектор А2 имеет
положительную оценку. Вводим этот вектор в базис опорного решения. В
соответствующем столбце симплексной таблицы единственное положительное
число, а именно 1, принимаем за разрешающий элемент для перехода к новому
опорному решению. Получаем следующее опорное решение Х4 = (4, 1, 0, 0, 0,
0), которое является оптимальным решением расширенной задачи, так как
оценки для всех векторов неположительные (табл. 11).
195
Таблица 11
Исходная задача также имеет оптимальное решение, которое получается из
оптимального
решения
расширенной
задачи
отбрасыванием
нулевых
искусственных переменных, т.е. X* = (4, 1, 0, 0).
О т в е т : min Z(X) = 15 при X* = (4, 1, 0, 0).
Задача № 12
Решить
методом
искусственного
базиса
задачу
линейного
программирования
Решение:
Приводим
задачу
к
каноническому
дополнительные переменные x4, x5, x6:
196
виду.
Для
этого
вводим
Чтобы найти начальное опорное решение с базисом из единичных
векторов, вводим в первое уравнение-ограничение искусственную переменную,
получаем расширенную задачу
Данная расширенная задача имеет начальное опорное решение X1 = (0, 0, 0, 0,
6, 8, 2) с базисом из единичных векторов Б1 = (А7, А5, А6). Вычисляем оценки
векторов условий и записываем в симплексную таблицу (табл. 12). Это решение
не является оптимальным, так как оценки
и
отрицательные. Находим приращение целевой функции при введении в базис
опорного решения векторов A1 и А3.
Получаем Δ Z1 =
-1
∙
(-2М)
= 2М, ΔZ3 = -2 ∙ (-М) = 2М. По
своему
усмотрению вводим в базис вектор A1.
Таблица 12
Выполняем преобразование Жордана с разрешающим элементом х11 = 2,
получаем второе опорное решение Х2 = (1, 0, 0, 0, 7, 11, 0) с базисом из
единичных векторов Б2 = (А1 А5, А6). Данное решение не является оптимальным,
197
потому
что
оценка
для
вектора A4отрицательная:
. Однако
опорное решение нельзя улучшить, так как все коэффициенты разложения
вектора А4 по базису опорного решения отрицательные: xi4 < 0 (i = 1, 2, 3).
Таким
образом,
расширенная
задача
не
имеет
решения
в
виду
неограниченности целевой функции. Исходная задача также не имеет решения
в виду неограниченности целевой функции.
О т в е т : Z(X)-> +∞
Задача № 13
Составить математическую модель транспортной задачи, исходные данные
которой таковы:
Решение:
Введем переменные задачи (матрицу перевозок)
Запишем матрицу стоимостей
.
Целевая функция задачи равна сумме произведений всех соответствующих
элементов матриц С и X:
.
198
Данная функция, определяющая суммарные затраты на все перевозки,
должна достигать минимального значения.
Составим систему ограничений задачи. Сумма всех перевозок, стоящих в
первой строке матрицы X, должна равняться запасам первого поставщика, а
сумма перевозок во второй строке матрицы X – запасам второго поставщика:
Это означает, что запасы поставщиков вывозятся полностью.
Суммы перевозок, стоящих в каждом столбце матрицы X, должны быть
равны запросам соответствующих потребителей:
Это означает, что запросы потребителей удовлетворяютсяполностью.
Необходимо
также
учитывать,
что
перевозки
не
могут
быть
отрицательными: хij ≥ 0, i = l, 2, ..., т; j = 1, 2, ..., п.
О т в е т : математическая модель задачи формулируется следующим
образом: найти переменные задачи, обеспечивающие минимум функции
и удовлетворяющие системе ограничений
Задача № 14
Для следующих транспортных задач составить математические модели:
199
Составить начальное опорное решение, используя метод северо-западного
угла, для транспортной задачи, исходные данные которой таковы:
Решение:
Распределяем запасы первого поставщика. Так как его запасы а1 = 200
меньше запросов первого потребителя b1 = 250, то в клетку (1, 1) записываем
перевозку x11 = 200 и исключаем из рассмотрения первого поставщика (табл.
6.1).
Определяем
оставшиеся
неудовлетворенными
потребителя
запросы
первого
.
Распределяем запасы второго поставщика. Так как его запасы a2 =
350 больше
оставшихся
потребителя
неудовлетворенными
запросов
первого
, то в клетку (2, 1) записываем перевозку x21 = 50 и
исключаем из рассмотрения первого потребителя. Определяем оставшиеся
запасы
как
второго
поставщика
.
Так
, то в клетку (2, 2) записываемх22 = 300 и исключаем по
своему усмотрению либо второго поставщика, либо второго потребителя. Пусть
исключили второго поставщика. Вычисляем оставшиеся неудовлетворенными
запросы второго потребителя
.
Распределяем запасы третьего поставщика.
Так как а3 > b'2 (400 > 0), то в клетку (3, 2) записываем х32 = 0 и исключаем
второго
потребителя.
Запасы
изменились
третьего
. Сравниваем
200
поставщика
не
и b3 (400 > 200), в
клетку (3, 3) записываем х33 = 200, исключаем третьего потребителя и
вычисляем
. Так как
, то в клетку (3, 4)
записываем х34 = 200. Ввиду того, что задача с правильным балансом, запасы
всех поставщиков исчерпаны и запросы всех потребителей удовлетворены
полностью.
Результаты построения опорного решения приведены в табл. 13.
Таблица 13
Проверяем правильность построения опорного решения. Число занятых
клеток должно быть равно N = m + n – l = 3 + 4 – l = 6. В табл. 32.1 занято 6
клеток. Применяя метод вычеркивания, убеждаемся, что найденное решение
является «вычеркиваемым»:
Следовательно, векторы условий, соответствующие занятым клеткам,
линейно независимы и построенное решение действительно является опорным.
Задача №15
Решить транспортную задачу, исходные данные которой таковы:
201
Решение:
1. Проверяем выполнение необходимого и достаточного условия
разрешимости задачи. Находим суммарные запасы поставщиков и суммарные
запросы потребителей:
Задача с неправильным балансом. Вводим четвертого, фиктивного
поставщика с запасами а4 = 1100 – 1000 = 100 и нулевыми стоимостями
перевозок единиц груза (табл. 14).
2. Находим начальное опорное решение методом минимальной стоимости
(см. табл. 7.1). Полученное решение X1 имеет
m + n – 1 = 4 + 4 – 1 = 7 базисных переменных. Вычисляем значение
целевой функции на этом опорном решении:
Z(Х1) = 1 ∙ 200 + 2 ∙ 200 + 3 ∙ 100 + 7 ∙ 100 + 9 ∙ 300 +
+ 12 ∙ 100 + 0 ∙ 100 = 5300.
Таблица 14
3. Для проверки оптимальности опорного решения необходимо найти
потенциалы. По признаку оптимальности в каждой занятой опорным решением
клетке таблицы транспортной задачи сумма потенциалов равна стоимости
202
(ui + vj = cij при xij > 0).
Записываем
систему
уравнений
для
нахождения
потенциалов и решаем ее:
Система состоит из семи уравнений и имеет восемь переменных. Система
неопределенная. Одному из потенциалов задаем значение произвольно: пусть u3 =
0. Остальные потенциалы находятся однозначно:
Значения потенциалов записываем в таблицу рядом с запасами или
запросами соответствующих поставщиков и потребителей (табл. 15).
Система уравнений для нахождения потенциалов достаточно проста, обычно
ее решают устно. Любой неизвестный потенциал, соответствующий занятой
клетке, равен находящейся в этой клетке стоимости минус известный
потенциал, соответствующий этой же клетке.
Таблица 15
203
4. Проверяем опорное решение X1 на оптимальность. С этой целью
вычисляем оценки Δij для всех незаполненных клеток таблицы (для всех
занятых клеток Δij = 0):
Положительные оценки записываем в левые нижние углы соответствующих
клеток таблицы, вместо отрицательных ставим знак «–».
Начальное опорное решение не является оптимальным, так как имеется
положительная оценка Δ24 = 2.
5. Переходим к новому опорному решению. Для клетки (2, 4) с
положительной оценкой строим цикл. Ставим в эту клетку знак «+»,
присоединяем ее к занятым клеткам и, применяя метод вычеркивания, находим
цикл (2, 4), (3, 4), (3, 2), (2, 2). Цикл изображен в табл.
6. В угловых точках цикла расставляем поочередно знаки «+» и «–»,
начиная с «+» в клетке (2, 4). В клетки, отмеченные знаком «+», добавляется
204
груз θ, а из клеток, отмеченных знаком «–», убавляется такой же по величине
груз. Определяем величину груза θ, перераспределяемого по циклу. Она равна
значению наименьшей из перевозок в клетках цикла, отмеченных знаком «–»:
.
Осуществляем сдвиг по циклу на величину θ = 100. Получаем второе
опорное решение Х2 (табл. 16).
Таблица 16
Находим для этого решения потенциалы (они приведены в табл. 32.5).
Вычисляем оценки:
205
Все
оценки
неположительные.
Следовательно,
решение
является
оптимальным. Вычисляем значение целевой функции на этом решении:
Z(X2) = 1 ∙ 200 + 2 ∙ 200 + 6 ∙ 100 + 7 ∙ 200 + 9 ∙ 300 + 0 ∙ 100 = 5200.
О т в е т : min Z(X) = 5200 при
.
Задача № 16
С к о л ь к о п р о и з в о д и т ь ? Предприятие располагает ресурсами двух
видов сырья и рабочей силы, необходимыми для производства двух видов
продукции. Затраты ресурсов на изготовление одной тонны каждого продукта,
прибыль, получаемая предприятием от реализации тонны продукта, а также
запасы ресурсов указаны в следующей таблице:
Стоимость одной тонны каждого вида сырья определяется следующими
зависимостями: (9 + 0,0088 r1) тыс. руб. для сырья 1 и (5 - 0,0086 r2) тыс. руб.
для сырья 2, где r1 и r2 – затраты сырья на производство продукции. Стоимость
одного часа трудозатрат определяется зависимостью (1 – 0,0002r), где r –
затраты времени на производство продукции.
Вопросы
1. Сколько продукта 1 следует производить для того, чтобы обеспечить
максимальную прибыль?
2. Сколько продукта 2 следует производить для того, чтобы обеспечить
максимальную прибыль?
3. Какова максимальная прибыль?
206
Решение:
Пусть х1 – объем выпуска продукта 1 (в тоннах), х2 – объем выпуска
продукта 2 (в тоннах). Тогда задача может быть описана в виде следующей
модели нелинейного программирования:
При использовании программы GINO исходную информацию для решения
этой задачи представляем в следующем виде:
MODEL:
1) MAX = 11 * X1 + 16 * X2 + 0,1 * X1 * X1 + 0,12 * X2 * X2 + 0,22 * * X1 * X2;
2) 3 * X1 + 5 * X2 < 120;
3) 4 * X1 + 6 * X2 < 150;
4) 14 * X1 + 12 * X2 < 400;
5) X1 > 0;
6) X2 > 0;
END
Получаем следующий результат:
OBJECTIVE FUNCTION VALUE
1) 507.407407
Ответы: 1. 16,67 т. 2. 13,89 т.
3. 507,407 тыс. руб.
Задача № 17
207
Формирование
портфеля
ценных
б у м а г . Клиент поручил
брокерской конторе купить для него на 1 млн. руб. 1 акции трех известных ему
компаний. Сделка заключается на год. Клиент заинтересован, с одной стороны,
в максимизации средней прибыли на вложенный капитал, а с другой – в
минимизации риска, поскольку прибыль, получаемая в конце года от акции
каждой компании, является величиной случайной. Известно, что чем
прибыльнее акция, тем выше связанный с ней риск, поэтому названные
критерии являются противоречивыми. Клиенту это обстоятельство разъяснили
и попросили его указать относительную значимость («вес») критериев. Клиент,
будучи человеком осторожным, высказал пожелание, чтобы риск учитывался с
весом втрое большим, чем прибыль. Получив такие указания, сотрудники
брокерской
конторы сформулировали
следующую
модель нелинейного
программирования:
где xj – объем средств, затраченных на покупку акций типа j (тыс. руб.);
μj – математическое ожидание процента прибыли от вложения 1 тыс. руб. в
акции типа j;
σjj – дисперсия указанного выше процента прибыли;
σij – ковариация между процентами прибыли от вложения 1 тыс. руб. в акции
типа i и j (i ≠ j).
Первая сумма в критерии – ожидаемое значение прибыл обеспечиваемой
пакетом акций, вторая – дисперсия прибыли пакета акций, взятая с «весом» 3.
Дисперсия прибыли пакета акций служит мерой риска.
Пусть средние значения процентов годовой прибыли от акций компаний
составляют соответственно 8, 10 и 13%.
208
Дисперсии σ11 = 0,1, σ22 = 0,15, σ33 = 0.19. Ковариации σ12 = 0,01, σ13 = 0,02
σ23 = 0,03.
Вопросы
1. Является ли целевая функция строго вогнутой?
2. Какую сумму следует вложить в покупку акций типа 1?
3. Какую сумму следует вложить в покупку акций типа 3?
Решение:
Модель
нелинейного
(в
данном
случае
–
квадратичного)
программирования имеет вид
Найдем все частные производные второго порядка целевой функции:
Рассчитав значения соответствующих определителей (главных миноров
матрицы Хессе), можно убедиться, что выполняются условия (4), откуда
следует,
что
целевая
значений х1, х2, х3 (значения
функция
строго
определителей
не
выпукла
зависят
для
от
любых
значений
переменных).
Используя программу GINO, исходную информацию для решения этой
задачи представляем в следующем виде:
MODEL:
1) MAX = 0,08 * X1 + 0,1 * X2 + 0,13 * X3 – R1 – R2;
2) R1 = 0,3 * X1 * X1 + 0,45 * X2 * X2 + 0,57 * X3 * X3;
3) R2 = 0,06 * X1 * X2 + 0,12 * X1 * X3 + 0,18 * X2 * X3;
4) X1 + X2 + X3 = 1000;
5) X1 > 0;
6) X2 > 0;
7) Xj - целое;
209
END
Получаем следующий результат:
OBJECTIVE FUNCTION VALUE
1) 169988.211211
Непосредственной подстановкой полученного решения в условия (5)–(8)
можно убедиться, что условия Куна-Таккера выполняются, причем решение
обеспечивает глобальный максимум целевой функции.
Ответы: 1. Да, является (при любых значениях переменных).
2. 496,8 тыс. руб. 3. 197,93 тыс. руб.
Задача № 18
П р о и з в о д с т в о м о л о ч н ы х п р о д у к т о в . Молокозавод производит
для местного рынка три вида продуктов: сметану, творог и сыр. Молоко
поступает ежедневно из двух ферм. Технологические и экономические данные
о производимых продуктах приведены в следующей таблице:
Затраты, связанные с приобретением сырья (молока), являются кусочнолинейной функцией закупаемого количества:
210
а) для фермы 1
б) для фермы 2
Вопросы
1. Какова максимальная ежедневная прибыль молокозавода?
2. Сколько молока следует закупать на ферме 1?
3. Сколько молока следует закупать на ферме 2?
4. Как изменится максимальная прибыль, если максимальное суточное
производство сметаны увеличить на 1 кг?
5. Как изменится максимальная прибыль, если максимальное суточное
производство творога уменьшить на 2 кг?
Решение:
Задача
может
быть
описана
с
помощью
модели
линейного
программирования.
Пусть х1 – количество молока, закупаемого на ферме 1, х2 – количество
молока, закупаемого на ферме 2. Представим х1 и х2 в следующем виде:
(в нашем случае
(в нашем случае
).
Тогда стоимость молока, закупаемого на ферме 1, описывается функцией
,
211
а стоимость молока, закупаемого на ферме 2, – функцией
.
Окончательно модель линейного программирования имеет вид
Структура матрицы задачи линейного программирования показана в
следующей таблице:
212
Используя для решения этой задачи программу POMWIN, получаем
следующий результат:
Далее представлена таблица, содержащая границы устойчивости по
коэффициентам целевой функции:
Границы устойчивости по правым частям ограничений:
213
Ответы: 1. 8275 руб. 2. 312,5 кг. 3. 218,75 кг.
4. Увеличится на 45 руб.
5. Уменьшится на 80 руб.
214
Министерство образования и науки Российской Федерации
ДАЛЬНЕГОРСКИЙ ИНДУСТРИАЛЬНОЭКОНОМИЧЕСКИЙ ИНСТИТУТ
(филиал) государственного образовательного
учреждения высшего профессионального
образования «Дальневосточный
государственный технический университет
(ДВПИ имени В.В.Куйбышева)»
МАТЕРИАЛЫ ДЛЯ ОРГАНИЗАЦИИ САМОСТОЯТЕЛЬНОЙ РАБОТЫ СТУДЕНТОВ
Исследование операций
080502. 65 Экономика и управление на предприятии (по отраслям)
(очная / заочная форма обучения)
г. Дальнегорск
2010
215
Графический метод решения задач линейного программирования
Задача №1. Решить задачу линейного программирования графическим
методом, в зависимости от варианта:
1.
2.
3
4.
5.
6.
7.
8.
216
9.
10.
11.
12.
13
14.
217
15.
16.
17.
Симплексный метод решения задач линейного программирования
Задача № 2. Найти начальное опорное решение и путем перебора опорных
решений определить оптимальное решение задачи (выбор номера задачи в
зависимости от варианта):
1.
218
2.
3.
4.
5.
6.
219
7.
8.
9.
10.
11.
12.
220
13.
14.
15.
16.
17.
221
18.
19.
20.
21.
22.
222
23.
24.
Теория двойственности
Задача № 3. Составить двойственные задачи для следующих задач (номер
задачи в зависимости от варианта):1.
1.
2.
3.
223
4.
5.
Для следующих задач составить и решить двойственные и, используя их
решение, найти решение исходных задач:
6.
7.
8.
9.
224
10.
11.
12.
13.
225
Метод потенциалов
Задача № 4 Решить транспортные задачи методом потенциалов:
226
227
228
Метод Гомори решения задач целочисленного программирования
Задача №5 Решить задачи целочисленного программирования:
229
230
231
Министерство образования и науки Российской Федерации
ДАЛЬНЕГОРСКИЙ ИНДУСТРИАЛЬНОЭКОНОМИЧЕСКИЙ ИНСТИТУТ
(филиал) государственного образовательного
учреждения высшего профессионального
образования «Дальневосточный
государственный технический университет
(ДВПИ имени В.В.Куйбышева)»
КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ МАТЕРИАЛЫ
Исследование операций
080502. 65 Экономика и управление на предприятии (по отраслям)
(очная / заочная форма обучения)
г. Дальнегорск
2010
232
Перечень вопросов для итогового контроля
1.
Понятие модели. Виды и типы моделей.
2.
Основная задача линейного программирования (ЛП). Приведение задачи
ЛП к каноническому виду.
3.
Область допустимых решений задачи линейного программирования. Ее
геометрическая интерпретация.
4.
Методы решения задач линейного программирования.
5.
Графический метод решения задач линейного программирования с
двумя неизвестными.
6.
Графический метод решения задач линейного программирования с n
неизвестными.
7.
Симплексный метод решения задачи линейного программирования.
8.
Метод искусственного базиса.
9.
Основные правила составления математических моделей двойственных задач.
10. Первая и вторая теоремы двойственности.
11. Математическая модель транспортной задачи.
12. Математическая модель задач о рационе питания, об использовании ресурсов.
13. Опорное решение транспортной задачи. Методы построения начального
опорного решения.
14. Метод потенциалов. Алгоритм метода потенциалов.
15. Транспортная задача с ограничениями на пропускную способность.
16. Транспортная задача по критерию времени.
17. Виды и типы математических моделей.
18. Симплексный метод (алгоритм метода решения с помощью ЭВМ).
19. Экономическая интерпретация задач линейного программирования.
20. Решение оптимизационных задач с помощью пакета прикладных
программ Excel.
233
Тест по дисциплине «Исследование операций»
(верные ответы - первые)
1. Термин "исследование операций” появился …
в годы второй мировой войны
в 50-ые годы XX века
в 60-ые годы XX века
в 70-ые годы XX века
в 90-ые годы XX века
в начале XXI века
2. Под исследованием операций понимают (выберите наиболее подходящий вариант) …
комплекс научных методов для решения задач эффективного управления организационными
системами
комплекс мер, предпринимаемых для реализации определенных операций
комплекс методов реализации задуманного плана
научные методы распределения ресурсов при организации производства
3. Упорядочьте этапы, через которые, как правило, проходит любое операционное
исследование:
постановка задачи
построение содержательной (вербальной) модели рассматриваемого объекта (процесса)
построение математической модели
решение задач, сформулированных на базе построенной математической модели
проверка полученных результатов на адекватность природе изучаемой системы
реализация полученного решения на практике
4. В исследовании операций под операцией понимают…
всякое мероприятие (систему действий), объединенное единым замыслом и направленное на
достижение какой-либо цели
всякое неуправляемое мероприятие
комплекс технических мероприятий, обеспечивающих производство продуктов потребления
5. Решение называют оптимальным, …
если оно по тем или иным признакам предпочтительнее других
если оно рационально
если оно согласовано с начальством
если оно утверждено общим собранием
6. Математическое программирование …
занимается изучением экстремальных задач и разработкой методов их решения
представляет собой процесс создания программ для компьютера под руководством
математиков
занимается решением математических задач на компьютере
7. Задача линейного программирования состоит в …
отыскании наибольшего (наименьшего) значения линейной функции при наличии линейных
ограничений
создании линейной программы на избранном языке программирования, предназначенной для
решения поставленной задачи
234
описании линейного алгоритма решения заданной задачи
8. В задаче квадратичного программирования…
целевая функция является квадратичной
область допустимых решения является квадратом
ограничения содержат квадратичные функции
9. В задачах целочисленного программирования…
неизвестные могут принимать только целочисленные значения
целевая функция должна обязательно принять целое значение, а неизвестные могут быть
любыми
целевой функцией является числовая константа
10. В задачах параметрического программирования…
целевая функция и/или система ограничений содержит параметр(ы)
область допустимых решения является параллелограммом или параллелепипедом
количество переменных может быть только четным
11. В задачах динамического программирования…
процесс нахождения решения является многоэтапным
необходимо рационализировать производство динамита
требуется оптимизировать использование динамиков
12. Поставлена следующая задача линейного программирования:
F(х1, х2) = 5х1 + 6х2→ mах
0.2х1 + 0.3х2 ≤ 1.8,
0.2х1 + 0.1х2 ≤ 1.2,
0.3х1 + 0.3х2 ≤ 2.4,
х1 ≥ 0, х2 ≥ 0.
Выберите задачу, которая эквивалентна этой задаче.
F(х1, х2)= 5х1 + 6х2 → mах,
2х1 + 3х2 ≤ 18,
2х1 + х2 ≤ 12,
х1 + х2 ≤ 8,
х1 ≥ 0,
х2 ≥ 0.
F(х1, х2)= 6х1 + 5х2 → min,
2х1 + 3х2 ≤ 18,
2х1 + х2 ≤ 12,
х1 + х2 ≤ 8,
х1 ≥ 0,
х2 ≥ 0.
F(х1, х2)= 50х1 + 60х2 → mах,
2х1 + 3х2 ≤ 18,
2х1 + х2 ≤ 12,
х1 + х2 ≤ 8,
х1 ≥ 0,
235
х2 ≥ 0.
F(х1, х2)= 5х12 + 6х22 → mах,
2х1 + 3х2 ≤ 18,
2х1 + х2 ≤ 12,
3х1 + х2 ≤ 2.4,
х1 ≥ 0,
х2 ≥ 0.
13. Целевой функцией задачи линейного программирования может являться функция:
F=12x1+20x2–30x3 →min
F=
x12 x22
F= 3 x1
→min
4 x2 x3
→max
F= x1 2x2 →max.
2
14. Системой ограничений задачи линейного программирования может являться система:
x1 x2 3,
x x 0.
1
2
2
x1 x22 3,
x x 2.
1
2
x1 x2 4,
2
x1 x2 6.
x23 x1 4,
x 2 x 2 4.
1
2
15. Симплекс-метод - это:
аналитический метод решения основной задачи линейного программирования
метод отыскания области допустимых решений задачи линейного программирования;
графический метод решения основной задачи линейного программирования;
метод приведения общей задачи линейного программирования к каноническому виду.
16. Задача линейного программирования состоит в:
отыскании наибольшего или наименьшего значения линейной функции при наличии линейных ограничений
разработке линейного алгоритма и реализации его на компьютере
составлении и решении системы линейных уравнений
поиске линейной траектории развития процесса, описываемого заданной системой ограничений.
17. Область допустимых решений задачи линейного программирования не может выглядеть так:
236
18. Целевой функцией задачи линейного программирования может являться функция:
F=12x1+20x2–30x3 →min
F=
x12 x22
F= 3 x1
2
F= x1
→min
4 x2 x3
→max
2x2 →max.
19.Системой ограничений задачи линейного программирования может являться система:
x1 x2 3,
x x 0.
1
2
x12 x22 3,
x x 2.
1
2
x1 x2 4,
2
x1 x2 6.
x23 x1 4,
x 2 x 2 4.
1
2
20. Область допустимых решений задачи линейного программирования имеет вид:
Тогда максимальное значение функции F(х1, х2)= 3х1 + 5х2 равно…
29
20
27
31
21. Область допустимых решений задачи линейного программирования имеет вид:
Тогда максимальное значение функции F(х1, х2)= 5х1 + 3х2 равно…
30
32
12
27
22. Область допустимых решений задачи линейного программирования имеет вид:
237
Тогда максимальное значение функции F(х1, х2)= 2х1 - 2х2 равно…
12
14
8
20
23. Область допустимых решений задачи линейного программирования имеет вид:
Тогда минимальное значение функции F(х1, х2)= 2х1 - 2х2 равно…
-8
-12
2
0
24. Область допустимых решений задачи нелинейного программирования имеет вид:
Тогда максимальное значение функции F(х1, х2)= х2 – х12 равно…
4
6
-5
12
25. Максимальное значение целевой функции F(х1, х2)= 5х1 + 2х2 при ограничениях
х1 + х2 ≤ 6,
х1 ≤ 4,
х1 ≥ 0, х2 ≥ 0, равно …
24
18
26
238
12
26. Малое предприятие производит изделия двух видов. На изготовление одного изделия вида А расходуется 2
кг сырья, на изготовление одного изделия вида В – 1 кг. Всего имеется 60 кг сырья. Требуется составить план
производства, обеспечивающий получение наибольшей выручки, если отпускная стоимость одного изделия
вида А 3 д.е., вида В - 1 у.е., причем изделий вида А требуется изготовить не более 25, а вида В – не более 30.
Данная задача является …
задачей линейного программирования
задачей, решаемой методом динамического программирования
задачей нелинейного программирования
задачей сетевого планирования.
27. Малое предприятие производит изделия двух видов. На изготовление одного изделия вида А расходуется 2
кг сырья, на изготовление одного изделия вида В – 1 кг. Всего имеется 60 кг сырья. Требуется составить план
производства, обеспечивающий получение наибольшей выручки, если отпускная стоимость одного изделия
вида А 3 д.е., вида В - 1 у.е., причем изделий вида А требуется изготовить не более 25, а вида В – не более 30.
Целевой функцией данной задачи является функция …
F(x1,x2)=3x1+x2 →max
F(x1,x2)=25x1+30x2 →max
F(x1,x2)=2x1+x2 →max
F(x1,x2)=60 -2x1 -x2 →min
28. Малое предприятие производит изделия двух видов. На изготовление одного изделия вида А расходуется 2
кг сырья, на изготовление одного изделия вида В – 1 кг. Всего имеется 60 кг сырья. Требуется составить план
производства, обеспечивающий получение наибольшей выручки, если отпускная стоимость одного изделия
вида А 3 д.е., вида В - 1 у.е., причем изделий вида А требуется изготовить не более 25, а вида В – не более 30
Допустимым планом данной задачи является план:
X=(20,20)
X=(25,15)
X=(20,25)
X=(30,10)
29. В двух пунктах А1 и А2 имеется соответственно 60 и 160 единиц товара. Весь товар нужно перевезти в
пункты В1, В2, В3 в количестве 80, 70 и 70 единиц соответственно. Матрица тарифов такова:
4 6 8
.
С
5 8 7
Спланируйте перевозки так, чтобы их стоимость была минимальной.
Данная задача является …
транспортной задачей
задачей нелинейного программирования
задачей коммивояжера
задачей о назначениях
30. В двух пунктах А1 и А2 имеется соответственно 60 и 160 единиц товара. Весь товар нужно перевезти в
пункты В1, В2, В3 в количестве 80, 70 и 70 единиц соответственно. Матрица тарифов такова:
Спланируйте перевозки так, чтобы их стоимость была минимальной
Опорным планом данной задачи является план:
X 60
20
X 40
40
X 20
60
X 30
50
0 0 ;
70 70
20 0
50 70
20 20
50 50
20 10
50 60
239
4 6 8
.
С
5 8 7
31. В двух пунктах А1 и А2 имеется соответственно 60 и 160 единиц товара. Весь товар нужно перевезти в
пункты В1, В2, В3 в количестве 80, 70 и 70 единиц соответственно. Матрица тарифов такова:
4 6 8
.
С
5 8 7
Спланируйте перевозки так, чтобы их стоимость была минимальной.
Целевой функцией данной задачи является функция:
F=4x11+6x12+8x13+5x21+8x22+7x23→min
4
F= x11
6
8
5
8
7
→min
x12
x12
x21
x22
x23
F=60x1+160x2+80x3+70x4+705 →max
F=60x1+160x2–80x3–70x4–705 →min
32. В двух пунктах А1 и А2 имеется соответственно 60 и 160 единиц товара. Весь товар нужно перевезти в
пункты В1, В2, В3 в количестве 80, 70 и 70 единиц соответственно. Матрица тарифов такова:
Спланируйте перевозки так, чтобы их стоимость была минимальной.
Оптимальным планом данной задачи является план:
X 0 60 0 ;
80 10 70
X 0 0 60 .
80 70 10
X 60 0 0 ;
20 70 70
X 20 20 20 ;
60 50 50
33. Транспортная задача
30
100+b
3
20
4
30+a
6
100
будет закрытой, если…
a=60, b=80
a=60, b=85
a=60, b=70
a=60, b=75
34. Транспортная задача
30
100
3
20
4
30
6
100
является…
открытой
закрытой
неразрешимой
35. Транспортная задача
50
100
3
20
4
30
6
100
является…
закрытой
открытой
неразрешимой
9
1
8
9
1
8
9
1
8
240
4 6 8
.
С
5 8 7
36. Для решения следующей транспортной задачи
50
90
3
9
20
4
1
30
6
8
100
необходимо ввести…
фиктивного потребителя
фиктивного поставщика;
эффективный тариф
эффективную процентную ставку.
37. Для решения следующей транспортной задачи
50
130
3
9
20
4
1
30
6
8
100
необходимо ввести…
фиктивного поставщика;
фиктивного потребителя
эффективный тариф
эффективную процентную ставку.
38. Среди данных транспортных задач
закрытыми являются…
2
2и3
1и3
1
39. Исходный опорный план транспортной задачи можно составить…
всеми перечисленными методами
методом северо-западного угла
методом минимального тарифа
методом двойного предпочтения
методом аппроксимации Фогеля
40. Если целевая функция задачи линейного программирования задана на максимум, то… целевая функция
двойственной задачи задается на минимум
241
целевая функция в двойственной задаче отсутствует
двойственная задача не имеет решений
двойственная задача имеет бесконечно много решений
41. Дана задача линейного программирования:
F(х1, х2)= 2х1 + 7х2 → mах,
-2х1 + 3х2 ≤ 14,
х1 + х2 ≤ 8,
х1 ≥ 0, х2 ≥ 0.
Двойственной для этой задачи будет следующая…
F*(y1, y2)= 14y1 + 8y2 → min,
-2y1 + y2 2,
3y1 + y2 7,
y1 ≥ 0, y2 ≥ 0.
F*(y1, y2)= 2y1 + 7y2 → min,
-2y1 + 3y2 14,
y1 + y2 8,
y1 0, y2 0.
F*(y1, y2)= 2y1 + 7y2 → min,
-2y1 + y2 2,
3y1 + y2 7,
y1 0, y2 0.
F*(y1, y2)= 14y1 + 8y2 → min,
-2y1 + 32 2,
y1 + y2 7,
y1 ≥ 0, y2 ≥ 0.
42. Если одна из пары двойственных задач имеет оптимальный план, то…
и другая имеет оптимальный план
другая не имеет оптимального плана
другая не имеет допустимых решений
43. Если одна из пары двойственных задач имеет оптимальный план, то…
и другая имеет оптимальный план и значения целевых функций при их оптимальных планах равны между
собой
и другая имеет оптимальный план, но значения целевых функций при их оптимальных планах не равны между
собой
другая задача может не иметь оптимального плана, но иметь допустимые решения
44. Если целевая функция одной из пары двойственных задач не ограничена (для задачи на максимум – сверху,
для задачи на минимум - снизу), то
другая задача не имеет допустимых планов
другая задача имеет допустимые планы, но не имеет оптимального плана
целевая функция другой задачи также не ограничена
45. При решении некоторых задач нелинейного программирования применяется …
метод множителей Лагранжа
метод Гаусса
метод аппроксимации Фогеля
метод Гомори
242
46. Задана задача нелинейного программирования
F(х1, х2)= х12 + х22 → mах,
х1 + х2 =6,
х1 ≥ 0, х2 ≥ 0.
Наибольшее значение целевой функции F(х1, х2) …
равно 36
равно 18
равно 72
не достижимо (+ )
47. Задана задача нелинейного программирования
F(х1, х2)= х12 + х22 → min,
х1 + х2 =6,
х1 ≥ 0, х2 ≥ 0.
Наименьшее значение целевой функции F(х1, х2) …
равно 18
равно 36
равно 6
равно 9
48. Задана задача нелинейного программирования
F(х1, х2)= х12 + х22 → mах,
х1 + х2 =6,
х1, х2 - любые.
Наибольшее значение целевой функции F(х1, х2) …
не достижимо (+ )
равно 36
равно 18
равно 72
49. Задана задача нелинейного программирования
F(х1, х2)= х12 + х22 → min,
х1 + х2 =6,
х1, х2 - любые.
Наименьшее значение целевой функции F(х1, х2) …
равно 18
равно 36
равно 6
равно 9
равно 0
не достижимо (- )
50. Область допустимых решений задачи нелинейного программирования имеет вид:
Тогда максимальное значение функции F(х1, х2)= х12 +х22 равно…
36
72
25
12
243
51. Область допустимых решений задачи нелинейного программирования имеет вид:
Тогда минимальное значение функции F(х1, х2)= х12 +х22 равно…
0
6
9
16
52. Для решения транспортной задачи может применяться…
метод потенциалов
метод множителей Лагранжа
метод Гаусса
метод дезориентации
53. В системе ограничений общей задачи линейного программирования …
могут присутствовать и уравнения, и неравенства
могут присутствовать только уравнения
могут присутствовать только неравенства
54. В системе ограничений стандартной (симметричной) задачи линейного программирования …
могут присутствовать только неравенства
могут присутствовать и уравнения, и неравенства
могут присутствовать только уравнения
55. В системе ограничений канонической (основной) задачи линейного программирования …
могут присутствовать только уравнения (при условии неотрицательности переменных)
могут присутствовать только неравенства (при условии неотрицательности переменных)
могут присутствовать и уравнения, и неравенства (при условии неотрицательности переменных)
56. Задача линейного программирования
F(х1, х2)= 2х1 + 7х2 → mах,
-2х1 + 3х2 ≤ 14,
х1 + х2 ≤ 8,
х1 ≥ 0, х2 ≥ 0.
записана в …
стандартной (симметричной) форме
канонической (основной) форме
словесной форме
57. Для записи задачи
F(х1, х2)= 2х1 + 7х2 → mах,
-2х1 + 3х2 ≤ 14,
х1 + х2 ≤ 8,
х1 ≥ 0, х2 ≥ 0.
в канонической форме …
необходимо ввести две дополнительных неотрицательных переменных
необходимо ввести три дополнительных неотрицательных переменных
необходимо ввести четыре дополнительных неотрицательных переменных
244
58. Для записи задачи
F(х1, х2)= 2х1 + 7х2 → mах,
-2х1 + 3х2 ≤ 14,
х1 + х2 ≤ 8,
х1 + 4х2 ≥ 10,
х1 ≥ 0, х2 ≥ 0.
в канонической форме …
необходимо ввести три дополнительных неотрицательных переменных
необходимо ввести две дополнительных неотрицательных переменных
необходимо ввести четыре дополнительных неотрицательных переменных
необходимо ввести пять дополнительных неотрицательных переменных
59. Для записи задачи
F(х1, х2)= 2х1 + 7х2 → mах,
-2х1 + 3х2 = 14,
х1 + х2 ≤ 8,
х1 + 4х2 ≥ 10,
х1 ≥ 0, х2 ≥ 0.
в канонической форме …
необходимо ввести две дополнительных неотрицательных переменных
необходимо ввести три дополнительных неотрицательных переменных
необходимо ввести четыре дополнительных неотрицательных переменных
необходимо ввести пять дополнительных неотрицательных переменных
60. При решении задач целочисленного программирования может применяться …
метод Гомори
метод множителей Лагранжа
метод Гаусса
метод аппроксимации Фогеля
61. В основе решения задач методом динамического программирования лежит…
принцип оптимальности Беллмана
принцип «бритва Оккама»
принцип «зуб - за зуб, око- за око»
принцип Гейзенберга
62 . Ситуация, в которой участвуют стороны, интересы которых полностью или частично противоположны,
называется …
(конфликтной, конфликтная, конфликт, конфликтом)
63. Действительный или формальный конфликт, в котором имеется по крайней мере два участника (игрока),
каждый из которых стремится к достижению собственных целей, называется …
(игра, игрой)
64. Допустимые действия каждого из игроков, направленные на достижение некоторой цели, называются …
(правила игры, правилами игры)
65. Количественная оценка результатов игры называется …
(платежом, платеж, платёж)
66. Если в игре участвует только две стороны (два лица), то игра называется…
(парной, парная, парной игрой, парная игра)
67. Если в парной игре сумма платежей равна нулю, то есть проигрыш одного игрока равен выигрышу другого,
то игра называется игрой…
(с нулевой суммой)
68. Однозначное описание выбора игрока в каждой из возможных ситуаций, при которой он должен сделать
личный ход, называется..
(стратегией игрока, стратегия игрока, стратегией, стратегия)
245
69. Если при многократном повторении игры стратегия обеспечивает игроку максимально возможный средний
выигрыш (минимально возможный средний проигрыш), то такая стратегия называется…
(оптимальной, оптимальная, оптимальной стратегией, оптимальная стратегия)
70. Пусть - нижняя цена, а - верхняя цена парной игры с нулевой суммой. Тогда верно утверждение…
2 + 2 = 1
+=0
71. Пусть - нижняя цена, а - верхняя цена парной игры с нулевой суммой. Если = = v, то число v
называется …
ценой игры
точкой равновесия
оптимальной стратегией
смешанной стратегией
72. Пусть - нижняя цена, а - верхняя цена парной игры с нулевой суммой. Если = , то игра называется…
игрой с седловой точкой
неразрешимым конфликтом
игрой без правил
73. Вектор, каждая из компонент которого показывает относительную частоту использования игроком
соответствующей чистой стратегии, называется…
смешенной стратегией
направляющим вектором
вектором нормали
градиентом
74. Нижняя цена матричной игры, заданной платежной матрицей
1 4
, равна…
3 2
2
4
1
3
75. Верхняя цена матричной игры, заданной платежной матрицей
1 4
, равна…
3 2
3
4
1
2
76. Матричная игра, заданная платежной матрицей
1 4
, …
3 2
не имеет седловой точки
имеет седловую точку
не является парной
77. Нижняя цена матричной игры, заданной платежной матрицей
4
5
6
2
246
2 5
, равна…
6 4
78. Верхняя цена матричной игры, заданной платежной матрицей
2 5
, равна…
6 4
5
4
6
2
79. Нижняя цена матричной игры, заданной платежной матрицей
1 4
, …
3 2
меньше верхней цены
равна верхней цене
не существует
80. Верхняя цена матричной игры, заданной платежной матрицей
1 4
, …
3 2
Больше нижней цены
равна нижней цене
не существует
22 22 22
81. Матричная игра, заданная платежной матрицей 21 23 23 , …
20 21 24
имеет седловую точку
не имеет седловой точки
не является парной
22 22 22
82. Цена игры, заданной платежной матрицей 21 23 23 , равна…
20 21 24
22
21
20
23
24
83. Матричная игра, заданная платежной матрицей
7 9 8
, …
10 6 9
является парной
имеет седловую точку
не является парной
84. Парная игра с нулевой суммой, заданная своей платежной матрицей, может быть сведена к …
задаче линейного программирования
задаче нелинейного программирования
целочисленной задаче линейного программирования
классической задаче оптимизации
85. Нижняя цена матричной игры, заданной платежной матрицей
3
4
2
5
247
2 5
, равна…
4 3
86. Верхняя цена матричной игры, заданной платежной матрицей
2 5
, равна…
4 3
4
5
3
2
87. Матричная игра, заданная платежной матрицей
2 5
, …
4 3
не имеет седловой точки
имеет седловую точку
не является парной
88. Нижняя цена матричной игры, заданной платежной матрицей
3 6
, равна…
7 5
5
3
6
7
89. Верхняя цена матричной игры, заданной платежной матрицей
3 6
, равна…
7 5
6
3
7
5
90. Нижняя цена матричной игры, заданной платежной матрицей
2 5
, …
4 3
меньше верхней цены
равна верхней цене
не существует
91. Верхняя цена матричной игры, заданной платежной матрицей
2 5
, …
4 3
Больше нижней цены
равна нижней цене
не существует
20 22 25
92. Матричная игра, заданная платежной матрицей 22 21 23 , …
20 21 24
не имеет седловой точки
имеет седловую точку
не является парной
20 22 25
93. Цена игры, заданной платежной матрицей 22 21 23 , заключена в пределах…
20 21 24
от 21 до 22
от 20 до 25
от 22 до 23
248
от 21 до 24
94. Если в потоке событий события следуют одно за другим через заранее заданные и строго определенные
промежутки времени, то такой поток называется …
регулярным
сложным
организованным
простым
95. Если вероятность попадания любого числа событий на промежуток времени зависит только от длины этого
промежутка и не зависит от того, как далеко расположен этот промежуток от начала отсчета времени, то
соответствующий поток событий называется:
стационарным
потоком без последствий
простейшим
пуассоновским
96. Если число событий, попадающих на один из произвольно выбранных промежутков времени, не зависит от
числа событий, попавших на другой, также произвольно выбранный промежуток времени при условии, что эти
промежутки не пересекаются, то соответствующий поток событий называется …
потоком без последствий
регулярным
показательным
нормальным
97. Если вероятность попадания на очень малый отрезок времени сразу двух или более событий пренебрежимо
мала по сравнению с вероятностью попадания только одного события, то соответствующий поток событий
называется…
ординарным
неординарным
нормальным
пуассоновским
98. Если поток событий одновременно обладает свойствами стационарности, ординарности и отсутствием
последствия, то он называется:
простейшим (пуассоновским)
нормальным
обычным
сложным
99. Одноканальная СМО с отказами представляет собой пост ежедневного обслуживания для мойки
автомобилей. Заявка - автомобиль, прибывший в момент, когда пост занят, - получает отказ в обслуживании.
Интенсивность потока автомобилей λ=1,0 (автомобиль в час). Средняя продолжительность обслуживания - 1,8
часа. Поток автомобилей и поток обслуживания являются простейшими. Тогда в установившемся режиме
относительная пропускная способность q равна…
0, 356
0, 555;
1,8
0,643
100. Одноканальная СМО с отказами представляет собой пост ежедневного обслуживания для мойки
автомобилей. Заявка - автомобиль, прибывший в момент, когда пост занят, - получает отказ в обслуживании.
Интенсивность потока автомобилей λ=1,0 (автомобиль в час). Средняя продолжительность обслуживания - 1,8
часа. Поток автомобилей и поток обслуживания являются простейшими. Тогда в установившемся режиме
процент автомобилей, получающих отказ в обслуживании, равен…
64,4 %
55,5 %
44,5 %
35,6 %;
249
Министерство образования и науки Российской Федерации
ДАЛЬНЕГОРСКИЙ ИНДУСТРИАЛЬНОЭКОНОМИЧЕСКИЙ ИНСТИТУТ
(филиал) государственного образовательного
учреждения высшего профессионального
образования «Дальневосточный
государственный технический университет
(ДВПИ имени В.В.Куйбышева)»
СПИСОК ЛИТЕРАТУРЫ
Исследование операций
080502. 65 Экономика и управление на предприятии (по отраслям)
(очная / заочная форма обучения)
г. Дальнегорск
2010
250
Учебно-методическое обеспечение дисциплины
Основная литература
1. Исследование операций в экономике : учебное пособие / под ред.
Н. Ш. Кремера. – М. : ЮНИТИ, 2008.
2. Красс М. С. Математические методы и модели для магистров
экономики : учебное пособие / М. С. Красс, Б. П. Чупрынов. – СПб. : Питер,
2008.
3. Мельников В. П. Исследование систем управления : учебник для студ.
высш. учеб. заведений / В. П. Мельников. – М. : Академия, 2008.
4. Мишин В. М. Исследование систем управления : учебник для вузов / В.
М. Мишин. – 2-е изд., стереотип. – М. : ЮНИТИ-ДАНА, 2008.
5. Пантелеев А. В. Теория управления в примерах и задачах : учебное
пособие / А. В. Пантелеев, А. Бортаковский. – М. : Высш. шк., 2009.
6. Ползунова Н. Н. Исследование систем управления : учебное пособие
для вузов / Н. Н. Ползунова, В. Н. Краев. – М. : Академический Проект, 2008.
Дополнительная
1. Бережная Е. В. Математические методы моделирования экономических
систем / Е. В. Бережная, В. И. Бережной. – М. : Финансы и статистика, 2006.
2. Вентцель Е. С. Исследование операций / Е. С. Вентцель. – М. : Высшая
школа, 2001.
3. Гарнаев А. Ю. Использование MS Excel и YBA в экономике и
финансах / А. Ю. Гарнаев. – СПб. : BHV-Санкт-Петербург, 2000.
4. Емельянов А. А. Имитационное моделирование экономических
процессов : учеб. пособие / А. А. Емельянов. – М. : Финансы и статистика,
2006.
5. Карманов В. Г. Математическое программирование / В. Г. Карманов. –
М. : Наука, 2002.
6. Красс М. С. Математические методы и модели для магистрантов
экономики : учебное пособие / М. С. Красс, Б. П. Чупрынов. – СПб. : Питер,
2006.
251
7. Красс М. С. Основы математики и ее приложения в экономическом
образовании / М. С. Красс, Б. П. Чупрынов. – М. : Дело, 2003.
8. Плис А. И. Mahcad. Математический практикум для инженеров и
экономистов : учеб. пособие / А. И. Плис, Н. А. Сливина. – 2-е изд. перераб. и
доп. – М. : Финансы и статистика, 2003.
9. Салманов О. Н. Математическая экономика с применением Mahcad и
Excel / О. Н. Салманов. – СПб. : БХВ-Петербург, 2003.
Информационные ресурсы
1. Михайлова И. В. Исследование операций. Специальный курс : Ч. 1.
Математическая модель операции
[Электронный ресурс] : учебное пособие /
И. В. Михайлова. – Воронеж : Изд-во ВГУ, 2003. – Режим доступа :
http://window.edu.ru/resource/344/27344
2. Михайлова И. Н. Исследование операций : Ч. 2. Модели управления
запасами [Электронный ресурс] : учебно-методическое пособие / И. Н.
Михайлова, Л. Н. Баркова. – Воронеж : Изд-во ВГУ, 2005. – Режим доступа :
http://window.edu.ru/resource/603/59603
3. Пчельник В. К. Исследование операций [Электронный ресурс] :
методические рекомендации / В. К. Пчельник, И. Н. Ревчук. – Гродно
(Беларусь) : ГрГУ им. Я. Купалы, 2010. – Режим доступа :
http://window.edu.ru/resource/120/69120
252