В главе 1 отмечалось, что в течение многих десятилетий
реклама

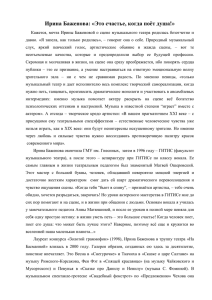
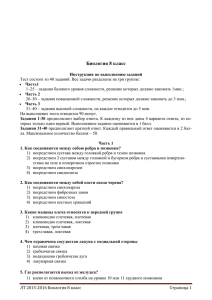
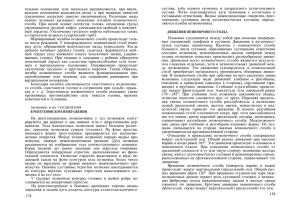
Реализованные проекты УДК 621.01 А.Н.ВОЛКОВ, П.В.СМОРОДОВ ДЕМОНСТРАЦИОННЫЕ РОБОТЫ НА СЦЕНЕ ТЕАТРА: ФИГУРЫ ВЕЛИКАНОВ В ТЕТРАЛОГИИ ВАГНЕРА "КОЛЬЦО НИБЕЛУНГА" В постановке Мариинского театра 2003 года оперной тетралогии Р.Вагнера «Кольцо нибелунга» на сцене в соответствии с замыслом главного художника находятся отсутствующие в либретто гигантские, высотой 10 метров антропоморфные демонстрационные роботы, механические статуарные персонажи, изменяющие свои позы от картины к картине; они названы великанами. Авторы принимали активное участие в их создании. Ниже в основных чертах описана логика процесса проектирования великанов. Внешность великанов была задана постановщиком, в соответствии с эскизами художника фигуры великанов получились астеническими, вытянутыми, анемичными. Это можно представить так, что в них оказалась заложенной идея пассивности, безучастности огромного внешнего мира, отличного от мира героев тетралогии – людей бурных, необузданых страстей. Далее показано, что эта концепция, осознанная или неосознанная, повлекла за собой ряд важнейших решений в выборе кинематических схем, конструкций и систем приводов. Первая альтернатива сводилась к выбору, выполнить ли фигуры цельными, или дать свободу движениям отдельных частей тела. После принятия решения в пользу ограниченной подвижности встал вопрос о выборе способов членения фигур великанов, построения кинематических схем и способов фиксирования поз на сцене. Вторая альтернатива относится к выбору способа установки фигур и удерживания их равновесия. Предусматривать свободную установку на пол и крепление больших и тяжелых фигур практически недопустимо, потому что для устойчивости (и к тому же в различных позах) у каждой из них должна была бы быть большая опорная площадь и мощная система несущего каркаса. Поэтому было принято практически безальтернативное решение о тельферном подвешивании. Это подвешивание, однако, не решало задачу изменения поз великанов. Третья альтернатива относилась к выбору кинематической схемы механизма фигуры, а именно, туловища, головы и конечностей. Для требуемого разнообразия поз понадобились: наклоны головы, плавный изгиб позвоночника, крутой изгиб в тазовом поясе и свобода изгибе рук и ног. В принципе было бы возможно в основных чертах копировать скелет человека с помощью последовательностей шарнирных соединений, соответствующих суставам, конечно, уменьшая число кинематических пар (в частности, уменьшить до двух-трех число степеней подвижности позвоночного столба) и число степеней подвижности в каждой паре (заменяя двух- и трехподвижные пары одноподвижными). Как показано в дальнейшем, единообразный подход был отвергнут, а кинематические схемы фигуры в целом и ее разных составных частей были выбраны из совершенно различных соображений. В некоторых случаях кинематические схемы были даже усложнены по сравнению со скелетом человека. В частности, для конечностей были приняты парадоксальные решения о замене коленных и локтевых суставов цепями нескольких шарнирно соединенных звеньев. Упрощенная кинематическая схема механизма великана (без приводов) представлена на рис.1. При членении фигуры на части, способные поворачиваться друг относительно друга, могли быть два способа задания положений и движений: с помощью тросов подвеса и с помощью встроенных в фигуру приводов. Было признано, что туловище и конечности нужно строить по разным принципам. Для конструкции было принято следующее кардинальное решение: с целью облегчения конструкции в целом жесткий каркас с аналогом позвоночного столба должен иметь только корпус великана. Конечности не имеют каркаса, руки и ноги являются бескаркасными, элементы их несущей обшивки соединяются непосредственно друг с другом. 70 http://tmm.spbstu.ru Демонстрационные роботы на сцене театра … 6 3 1 2 4 5 Рис.1. Упрощенная кинематическая схема механизма великана Туловище каждого из великанов выполнено на едином жестком каркасе в виде пространственной фермы с обшивкой, подобно многим произведениям современной монументальной скульптуры, выполняемым в технике выколотки. При этом обшивка крепится на системе специальных кронштейнов. Облицовка (обшивка) туловища фигуры выполнена из полупрозрачного пластика, она полностью, со всех сторон закрывает каркас. Ниже в терминах теории механизмов описана окончательная, реализованная конструкция фигуры великана. Фигура имеет подвижные части и соответственно следующие механизмы: механизм изгиба спины, механизм поворота и наклона головы, механизмы Теория Механизмов и Машин. 2005. №1. Том 3. 71 Реализованные проекты рук, механизмы ног. Внешний вид фигуры великана в собранном состоянии представлен на рис.2 (а – чертежный вид, б – фотография “великана” на сцене театра). 12 10 11 9 1 8 2 3 14 4 13 5 16 6 15 7 а) б) Рис.2. Внешний вид фигуры великана Грудная клетка 1 является нерасчлененной, моноблочной, а живот секционирован (профилированные оболочки 2, 3, 4, и 5). Фантастический, сильно вытянутый череп 10 на тонкой шее-штыре может наклоняться вперед-назад. Половины конечностей, соединяемые с туловищем (6 и 8) соединяются с концевыми частями цепочками звеньев. Показаны парные элементы, к которым крепятся тросы. Кольца 11 в плечах определяют основные точки подвешивания, прямо стоящая (висящая) фигура удерживается именно на них. За штыри 13 тросами задается наклон корпуса, а за штыри 15 тросами за бедра поднимаются ноги, так что задается изгиб в аналогах тазобедренных суставов. Наклоны головы, изгиб позвоночника и сгибание рук осуществляются встроенными приводами, которые задают углы относительного поворотов, а наклоны туловища и сгибание в тазобедренных суставах – тросами подвеса. Угловое ориентирование голеней задается только силами веса, поэтому независимо от положения всех остальных частей фигуры положение голеней остается близким к вертикальному. В качестве каркаса торса фигуры великана используется сварная рамная конструкция, состоящая из нескольких секций. Общий вид каркаса представлен на рис.3. 72 http://tmm.spbstu.ru Демонстрационные роботы на сцене театра … 9 10 8 1 2 3 4 5 7 6 Рис.3. Каркас торса великана Номера позиций на рис.3 и рис.2 соответствуют друг другу, т.е. позиции на каркасе указывают рамные элементы, а на рис.2 показаны соответственно те же элементы, обшитые пластиком. Голова не показана, она насаживается на штырь, который может наклоняться в вертикальной плоскости с помощью приводного механизма (он виден в грудной клетке). Масса всей конструкции составляет примерно 600 кг. Из важных и интересных задач механики отметим задачу параметрического синтеза многозвенного механизма позвоночного столба. Позвоночный столб построен как механизм с одной степенью свободы последовательной, периодической структуры. Кинематическая схема шарнирно-рычажного механизма позвоночного столба в двух конфигурациях представлена на рис.4 а, б. Позвоночный столб изгибается при работе привода с линейным перемещением выходного звена. В соответствии с разработанной методикой синтеза геометрические параметры звеньев были выбраны так, чтобы в одном крайнем положении ось была прямолинейна, а в другом – радиус кривизны равен заданному. Теория Механизмов и Машин. 2005. №1. Том 3. 73 Реализованные проекты 1 b 2 b 3 b D1 D2 D3 4 b D4 C4 C1 C2 Z Lv A1 B2 A5 A4 A3 A2 B1 C3 B4 B3 а) 4 b 3 b D4 2 b 1 b D3 D2 C4 D1 C1 B4 C3 C2 A5 B3 Z Lv A1 B1 A2 B2 A4 A3 б) Рис.4. Кинематическая схема шарнирно-рычажного механизма позвоночного столба Авторами проработаны альтернативные варианты схемных и конструктивных решений. Так были предложены другие схемы механизма позвоночного столба, для них также решались аналогичные задачи синтеза. В частности, было учтено, что при изгибе в продольной плоскости более естественным является задание переменной кривизны оси позвоночного столба. Известно, что позвоночные столб даже прямо стоящего человека имеет S-образный изгиб с точкой перегиба. При требованиях переменности кривизны оси позвоночного столба по длине и увеличении диапазонов углов поворота смежных звеньев от начала к концу общей кинематической цепи при периодичности структуры следует последовательно изменять геометрические параметры ячеек механизма (длин основных звеньев и размеры рычагов). Авторами разработана методика расчета геометрических параметров многозвенного механизма по кусочно-линейной аппроксимации заданной изогнутой оси позвоночника в предельных положениях. В результате расчетов получено, что за счет рационального выбора геометрических параметров диапазон углов поворота смежных звеньев может быть увеличен до 220 . Из этого может быть определено минимально необходимое число ячеек для получения требуемого диапазона углов поворота верхнего отдела позвоночника и головы. При малом числе звеньев видимые изломы очертания спины могут быть устранены "одеждой" или обшивкой. В случае необходимости подвижность позвоночного столба может быть сделана значительно выше, чем у человека. При необходимости изгиба позвоночного столба в двух плоскостях можно использовать два пути построения схем: или чередованием ячеек, задающих повороты соответственно вокруг взаимно перпендикулярных осей, или последовательным соединением двухстепенных ячеек. Ноги "великана" имеют возможность изгибаться в колене при помощи тросовой тяги. Принцип работы механизма аналогичен принципу работы руки. Разрез ноги приведен на рис.5.а Позициями на рисунке обозначены: 1- рама ноги, 2- мотор с редуктором и шкивом, 3 – трос, 4,5,6,7 и 8 – секции, 9 – ухо. На рис.5.б приведена кинематическая схема механизма ноги. 74 http://tmm.spbstu.ru Демонстрационные роботы на сцене театра … Ä 1 2 3 4 5 6 7 8 9 а) б) Рис.5. Нога “великана” Рамы механизмов ног 6 и 7 крепятся на рамном элементе 5 (рис.3), причем крепление может быть жестким или шарнирным. Таким образом, ноги могут быть зафиксированы в положении «стоя» или могут быть установлены так, что будет обеспечена возможность поворота только в тазобедренном суставе бедра относительно тела. Поворот бедра в тазобедренном суставе используется в случаях когда “великана” необходимо привести в сидячее положение. Фотография “великанов” в положении “сидя” приведена на рис.6. На фотографии “великаны” сидят на “камнях”, которые, являются традиционными для театра декорациями и представляют собой стальную ферму, обшитую пластиком. Обшивочный пластик – материал недостаточно прочный, для того чтобы выдержать массу “великанов”, и в данной сцене они лишь визуально контактируют между собой, а масса каждого “великана” распределена между тросами подвеса. Сегодня на сцене Мариинского театра можно наблюдать описанного в данной статье специализированного демонстрационного робота. Спектакли с их участием с успехом идут не только в России, но и в Европе. Теория Механизмов и Машин. 2005. №1. Том 3. 75 Реализованные проекты Рис.6. “Великаны” сидят по краям сцены Поступила 26.10.2004 76 http://tmm.spbstu.ru