Автоматизированная система ориентации солнечной панели
реклама

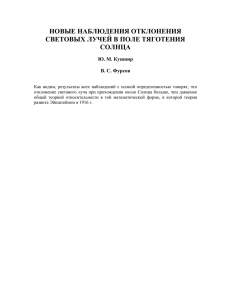
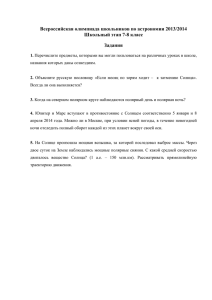
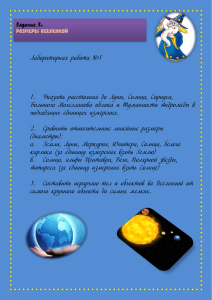
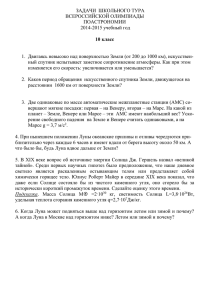
Автоматизированная система ориентации солнечной панели. Орлов Олег Валерьевич Ученик 10кл. МОУ СОШ № 75 г. Черноголовка Научные руководители: Орлов Валерий Иванович, к.ф.-м.н., старший научный сотрудник Института Физики Твердого Тела РАН, г. Черноголовка. Лебедев Петр Владимирович, учитель информатики МОУ СОШ №75, г. Черноголовка. Целью данной работы является создание автоматизированной модели установки, позволяющей ориентировать солнечную панель на солнце или любой другой источник света. В наше время все острее встает вопрос об исчерпаемости традиционных источников энергии (таких как газ, нефть, уголь), и потому больше внимания уделяется использованию и развитию альтернативных источников энергии, одним из которых является преобразование солнечной энергии в электричество. Выделяют два способа получения электричества из энергии солнца: прямой и косвенный. К последнему относятся различного рода концентраторы, которые нагревают промежуточный теплоноситель (например, воду), температура которого может достигать 1000-1400°C, нагретая жидкость, или газ поступают в турбину, соединенную с генератором, вырабатывающим электроэнергию. Примером установок с использованием косвенного принципа могут служить: параболоцилиндрические концентраторы, установки тарельчатого и башенного типа. Прямое преобразование солнечной энергии происходит с помощью фотоэлементов − пластин легированного полупроводникового материала с p-n переходом. Их действие основано на внутреннем фотоэффекте – перераспределении электронов по энергетическим уровням при поглощении солнечного излучения. Когда солнечный элемент освещается, поглощенные фотоны генерируют электрон-дырочные пары, p-n переход разделяет пары и на n-слое накапливается отрицательный заряд, а на p-слое положительный. Если подсоединить фотоэлемент к внешней электрической цепи, то через нагрузку начинает течь ток. В нашем проекте мы использовали солнечные элементы, изготовленные из монокристаллического кремния. Коэффициент полезного действия (КПД) этих элементов составлял 10% - 15%. Энергия, которую вырабатывает фотоэлемент, рассчитывается по формуле: E S R K cos где (1) – КПД фотоэлектрического преобразователя (ФЭП), S – площадь ФЭП. K – коэффициент прохождения атмосферы, R – прямое солнечное излучение (около 1400 Вт/м2), ϑ - угол между направлением солнечного излучения и перпендикуляром к плоскости ФЭП. Как видно из формулы (1), максимум энергии E будет тогда когда, cos ϑ =1 т. е. при ϑ =0 солнечные лучи падают на элемент под прямым углом. В горизонтальной системе координат положение Солнца (и любого другого небесного тела) определяется двумя координатами - азимутом (A) и высотой над горизонтом (h). Азимут это угол между полуденной линией и линией пересечения N S а б S Рис.1. Изменение азимута и высоты над горизонтом солнца в самый длинный (а) и самый короткий (б) день в году, для Черноголовки (56 с. ш. и 38.4 з. д.). плоскости математического горизонта с плоскостью вертикального круга, проходящего через светило. Азимуты отсчитываются от 0 до +180° к западу и от 0 до -180° к востоку. Иногда его отсчитывают от юга (в геодезии от севера) к западу в пределах от 0 до 360°. Высота над горизонтом это угол между направлением на светило и плоскостью горизонта. Высота отсчитывается от 0 да 90° к зениту и от 0 да -90° к надиру (диаметрально противоположная зениту точка). Азимут и высота солнца над горизонтом изменяются, в нашем городе Черноголовка, в течение самого длинного дня (21 июня 2013): ∆А=274.2° а ∆h=57.44°. В самый короткий день Солнце (21 декабря 2013) - ∆А=92.8° а ∆h=10.57° (см. Рис.1). Поэтому, если солнечная панель будет зафиксирована в одном положении (например, на юг), то часть солнечных суток Солнце будет находиться за ней, и солнечная панель практически не будет вырабатывать электричество. То, что энергия, вырабатываемая фотоэлектрическим преобразователем, пропорциональна косинусу угла падения солнечных лучей (1), и то, что этот угол постоянно меняется с течением времени, обосновывает необходимость ориентирование солнечной панели на солнце, при этом, по разным оценкам, вырабатываемая ею мощность увеличивается приблизительно на 30%. Для решения этой проблемы нами была разработана установка и изготовлена её 1 2 Рис. 2. Общий вид установки: 1 – солнечная панель, 2 - двух координатная система. движения. модель, показанная на Рис.2. Она состоит из солнечной панели Рис.2 (1), двух координатной системы движения Рис.2 (2), АЦП и компьютера. Установка была 2а 1а 2б 1б б а Рис. 3. Шаговый двигатель а, схема управления шаговым двигателем б сделана полностью самостоятельно из комплектующих Ориентирование панели может осуществляться двумя способами: старых приборов. 1. по фактическому положению солнца на основе анализа сигнала с фотоэлектрических датчиков. 2. по рассчитанному положению солнца на небосклоне. Далее рассмотрим основные составляющие установки подробнее. Двух координатная система движения показана на Рис.3а. Она состоит из двух шаговых четырехтактных двигателей и двух редукторов. Двигатель 1а и редуктор 2а (Рис.3а) осуществляют поворот панели в вертикальной плоскости - вдоль плоскости большого круга, проходящего через светило. Двигатель 1б и редуктор 2б (Рис.3а) позволяют поворачивать панель в плоскости горизонта. Эта система позволяет изменять положение панели так, что угол между нормалью к панели и падающими солнечными лучами ϑ был бы равен нулю (Формула 1). Использование редукторов позволяет ориентировать панель с точность 0.1°. Электрическая принципиальная схема управления шаговым двигателем показана на Рис.3б. В ней используются четыре мощных транзистора КТ829А, а управление ими осуществляется через АЦП плату, 5 5 3 4 1 2 б 5 5 а в Рис. 4. Общий вид солнечной панели а и электрическая принципиальная схема фотоэлектрических датчиков б, и солнечных модулей в. имеющую 18 цифровых входов-выходов. Солнечная панель с фотоэлектрическими датчиками показана на Рис.4. На панели расположены датчики 1-4 (Рис.4). Каждый датчик состоит из нескольких обычных солнечных элементов (размером 15х50 мм2.), соединенных последовательно как показано на Рис.4б. Так же на панели установлены четыре солнечных модуля 4 (Рис.4), соединенных параллельно, каждый из которых состоит из семи фотоэлементов соединенных последовательно Рис.4в. Напряжение снимается с резистора, сопротивление которого мы можем менять, подбирая оптимальную нагрузку для солнечных модулей. Для оцифровывания сигнала с четырех датчиков, солнечных модулей и управления шаговыми двигателями используется 10-ти разрядный АЦП, имеющий 4 аналоговых входа и 18 цифровых входов-выходов. Плата АЦП соединяется с компьютером по USBпорту и эмулируется как виртуальный COM-порт. Для перемещения шаговых двигателей, на цифровых выходах последовательно меняется их значение(0 или +5В). Они в свою очередь подсоединены к блоку управления шаговыми двигателями Рис.3б. Сигналы подаются на транзисторы в определенной последовательности, они переходят в состояние насыщения, и напряжение питания (12 вольт) подается на обмотку шагового двигателя L. Нами был выбран алгоритм подачи сигналов, при котором двигатель делает полшага. Работа установки осуществлялась с помощью программы написанной на языке С++ и библиотеки к ней с функциями и процедурами, позволяющими инициализировать АЦП и общаться с ним. У программы существует два режима ориентирования: по фактическому положению солнца и по рассчитанному положению солнца на небосклоне. В первом режиме, ориентация осуществляется на основе анализа сигналов с датчиков 1-2 и 3-4 Рис.4а. Они попарно установлены под углом 90о друг к другу и 45о к плоскости панели. Такое расположение датчиков обусловлено тем, что, когда свет падает на панель под прямым углом, их освещенность равна и поэтому напряжение на обоих датчиках 1-2 U1 и U2 равны. В противном случае один из датчиков (допустим 1) будет освещен сильнее, а другой (2) находиться «в тени», поэтому U1 > U2. Знак и величина 1 = U1 - U2 являются параметрами, на основании которых происходит ориентирование в горизонтальной плоскости (для вертикальной плоскости используются датчики 3 и 4 Рис.4а). После ориентации программа переходит в режим «ожидания», а именно «ждет», пока разность между одной из пар датчиков не станет больше чем 0.05В. Когда же разность превышает данную величину, установка начинает ориентировать солнечную панель в оптимальное положение. Для ориентации во втором режиме вычисляется положение солнца на небесной сфере, исходя из текущей даты и географических координат установки. Сначала вычисляется текущее положение солнца в эклиптической системе координат по формуле: 360 360 360 / e sin D g g D g 365,2422 365.2522 Где – эклиптическая долготы солнца, e – эксцентриситет орбиты Земли, D – время, прошедшее с начала года, в днях (например: 3.5 – полдень 3 января), g – эклиптическая долгота солнца на начало года, g – эклиптическая долгота солнца в перигее. В данной системе координат, положение небесных тел определяется относительно плоскости эклиптики (это плоскость в которой расположена орбита Земли вокруг солнца). За начало отсчета в эклиптической системе координат принимается точка весеннего равноденствия, ее положение определяется пересечением плоскостей земного экватора и эклиптики. После расчета эклиптической долготы солнца она пересчитывается (с учетом, что эклиптическая широта для Земли всегда равна нулю) в экваториальный часовой угол и склонение по формулам: H LST arctan tan cos arcsin sin sin Где H – часовой угол, LST – местное звездное время, – склонение солнца, – наклон плоскости эклиптики к оси вращения земли. В этой системе координат отсчет ведется относительно плоскости экватора. Часовой угол и местное звездное время принято измерять в часах и десятичных долях часа, однако их легко перевести в угловые единицы, используя тот факт, что 1 радиан соответствует приблизительно 3,82 часа. Затем полученные экваториальные координаты переводятся в горизонтальные, наиболее удобные для ориентирования различных установок (в том числе и для нашей) на объекты на небесной сфере, по формулам: h arcsin sin sin cos cos cos H sin sin sin a A arccos cos cos a a arctan tan cos где h – высота солнца над горизонтом, – географическая широта местонахождения установки и A – азимут солнца. Точность вычисления горизонтальных координат солнца достигает порядка сотых долей градуса, что в нашем случае является вполне приемлемым допуском. Используя описанный выше алгоритм, нами была вычислена зависимость горизонтальных координат Солнца (азимута и высоты над горизонтом) для трех дней: 1. самого длинного дня в году, 21 июня; 2. дня осеннего равноденствия, 22 сентября; 3. самого короткого дня в году, 21 декабря. На Рис. 5 изображена зависимость азимута и высоты Солнца над горизонтом от Рис. 5. Зависимость горизонтальных координат Солнца от времени (азимут – черная кривая и высота над горизонтом – красная кривая). Зеленой вертикальной линией отмечено время полудня. времени. Видно, что азимут Солнца зависит от времени практически линейно, в отличие от высоты над горизонтом. В будущем планируется провести анализ этой зависимости и, исходя из полученных данных, вывести оптимальный алгоритм для ориентирования солнечной панели. Нами так же была построена высоты зависимость Солнца над горизонтом для трех дней (Рис.6), указанных выше. Как видно в зимний период изменение высоты Солнца над горизонтом мало. Вполне вероятно, что в Рис. 6. Зависимость высоты Солнца над горизонтом от времени для дней летнего и зимнего солнцестояния и дня осеннего равноденствия панели, но для более определенного вывода этот период необходимости нет в ориентировании солнечной необходимо математическое моделирование процесса (планируем на будущее). В настоящее время программа работает следующим образом. Установка ориентируется на юг с помощью компаса (Рис.2). В конце солнечных суток программа рассчитывает время восхода и азимут точки восхода Солнца (высота над горизонтом в это время равна нулю) и перемещает панель в рассчитанное положение. Когда Солнце восходит, запускается таймер и через заданный пользователем промежуток времени программа вычисляет горизонтальные координаты Солнца в данный момент времени. После чего находится разность между полученным и текущим положением панели и, исходя из полученного результата, панель перемещается в рассчитанное положение. Интерфейс программы состоит из пяти вкладок, каждая из которых является отдельной подпрограммой. Вкладка «connect» позволяет выбрать тот номер COM-порта, под которым USBпорт АЦП платы эмулируется на компьютере. Вкладка «graphics» Рис.7 служит для получения графической информации о напряжении на датчиках и о разности напряжений (l-r) между 1 и 2 датчиком (leftright) и (u-d) между 3 и 4 (up-down). На экран выводятся графики зависимости напряжения от времени. Как видно из рисунка, в начале ориентирования (черная стрелка на левом графике) разность между 1 и 2 (красный и зеленый) датчиками около 200мВ, причем больше на левом (красном) датчике, поэтому двигатель, служащий для ориентации в горизонтальной плоскости (азимут), начал двигаться в левую сторону и значения на обоих датчиках выровнялись. К концу ориентирования (красная стрелка) разность составляла около 10мВ. Затем начинается ориентация в вертикальной Рис. 7. Общий вид интерфейса вкладки «graphics». плоскости (высота над горизонтом), и разность значений на датчиках 3 и 4 начала уменьшаться с 300 мВ до 7 мВ. Вкладка «information» позволяет получать численную информацию о напряжение на датчиках, разности между ними и количестве шагов, которые сделал каждый двигатель. Так же с помощью специальных кнопок можно в ручную переместить солнечную панель в нужное положение. Вкладка «panel» Рис.8 служит для построения зависимости ток-напряжение и мощность-напряжение. Чтобы получить эти зависимости, необходимо нажать кнопку «start», а затем кнопку «to max» чтобы вернуться к той позиции движка (величине нагрузочного сопротивления), на которой наблюдалась максимальная мощность. Вкладка «sun pos» позволяет переключаться между способами ориентирования (по факту и по рассчитанному положению солнца), а также предоставляет необходимую информацию для ориентации во втором режиме. Вне вкладок располагаются несколько кнопок: «start» и «stop» объединённые Рис. 8. Общий вид интерфейса вкладки «panel». рамкой «orientation» начинают и останавливают процесс Рис 9. Общий вид интерфейса вкладки «panel».ориентации, а под рамкой «measurement» __ процесс вывода данных. Кнопка «EXIT» возвращает все движки в исходное положение и выходит из программы. В процессе выполнения работы, нами была самостоятельно изготовлена модель автоматизированной установки ориентации солнечной панели, используя комплектующие от старых приборов: редукторы и шаговые двигатели. На данный момент установка полностью работоспособна и в настоящее время продолжается работа по ее усовершенствованию. Литература. 1. Т. Баерс, 20 «Конструкций с солнечными элементами», Москва, «Мир», 1988. 2. П. Даффет-Смит, «Практическая астрономия с калькулятором», Москва, «Мир», 1982 3. М.Е. Левенштейн, Г.С. Симин, Знакомство с полупроводниками, Москва, «Наука», 1984. 4. М.М. Колтун, Оптика и метрология солнечных элементов. «НАУКА» 1985.