Лабораторная работа №4 СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА МЕТОДОМ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК
реклама

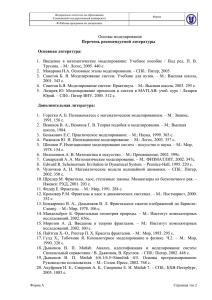
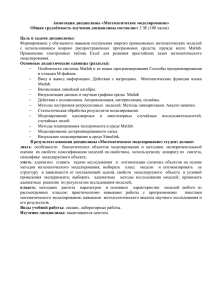
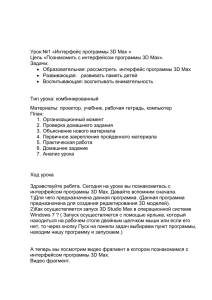
Лабораторная работа №4 СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА МЕТОДОМ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК 1. Цель работы Целью работы является изучение синтеза корректирующего устройства с помощью метода логарифмических амплитудных характеристик. 2. Задачи работы – Закрепление, углубление и расширение знаний студентов при синтезе САУ на основе частотного критерия качества. – Приобретение умений по определению параметров корректирующего устройства. – Приобретение умений и навыков работы с программой математического моделирования MATLAB. 3. Теоретическая часть Под синтезом системы автоматического управления понимается направленный расчет, имеющий конечной целью отыскание рациональной структуры системы и установление оптимальных величин параметров ее отдельных звеньев. Под синтезом корректирующего устройства понимают определение вида и параметров корректирующего средства, которые необходимо добавить к некоторой неизменяемой части системы управления, чтобы обеспечить требуемые динамические качества. 3.1. Метод логарифмических амплитудных характеристик Логарифмические амплитудные характеристики (ЛАХ) наиболее приемлемы для синтеза, так как ЛАХ, как правило, может делаться почти без вычислительной работы. Процесс синтеза обычно включает в себя следующие этапы: 1) Построение желаемой ЛАХ. Построение выполняется на основе требований, которые предъявляются к проектируемой системе. Система должна быть минимально-фазовой. 2) Построение располагаемой ЛАХ. 1 Под располагаемой ЛАХ, понимается характеристика исходной системы, построенной исходя из требуемых режимов стабилизации или слежения, требуемых выходной мощности, скорости, ускорения и т.п. 3) Определение вида и параметров корректирующего устройства. Корректирующие звенья могут вводиться в систему различными способами: последовательно, параллельно, либо в виде местной обратной связи. Наиболее просто определяется корректирующее устройство последовательного типа. Если желаемая (скорректированная) передаточная функция (ПФ) разомкнутой системы – WЖ ( s ) , располагаемая (нескорректированная) – WР ( s ) и ПФ корректирующего звена последовательного типа - WК ( s ) , то получим WЖ ( s ) WР ( s )WК ( s ), откуда WК ( s ) WЖ ( s ) . WР ( s ) (1) Для ЛАХ можно записать LК ( ) LЖ ( ) LР ( ). 4) Техническая реализация корректирующего устройства. По виду ЛАХ необходимо подобрать схему и параметры корректирующего звена последовательного типа. Если необходимо, то последовательное звено может быть пересчитано на эквивалентное параллельное звено или эквивалентную обратную связь. 5) Проверочный расчет и построение переходного процесса. На данном этапе необходимо убедиться, что полученная система с включенным корректирующим устройством будет отвечать заданным требованиям. 3.2. Синтез корректирующего устройства Пусть задано исходная динамическая система, которая описывается ПФ WР ( s ) (рис. 1, а). Если система не удовлетворяет заданным показателям качества или является неустойчивой, то ее поведение можно улучшить, включив последовательно 2 корректирующее устройство с ПФ WК ( s ) (рис. 1, б). б) a) u(t) + - Wр(s) y(t) u(t) + - WК(s) Wр(s) y(t) Рис. 1. Исходная и скорректированная система Рассмотрим требования к низкочастотной части желаемой ЛАХ, связанные с необходимой точностью. Пусть на вход подан гармонический сигнал вида g (t ) g max sin(k t ), (2) где g max – амплитуда гармонического сигнала. Амплитуда ошибки может быть найдена с помощью модуля передаточной функции по ошибке: g max xmax , 1 W ( jk ) где W ( jk ) – частотная передаточная функция разомкнутой системы. Так как в подавляющем большинстве случаем амплитуда ошибки значительно меньше амплитуды входного сигнала, то получим g max xmax . W ( jk ) Из последнего выражения можно сформулировать требования к низкочастотной части ЛАХ следящей системы. Для того чтобы входное воздействие (2) воспроизводилось с ошибкой, не превышающей xmax , ЛАХ системы должно проходить не ниже контрольной точки Ak с координатами (рис. 2) g k , L(k ) 20lg W ( jk ) 20lg max . (3) xmax Часто при определении условий работы следящей системы оговаривают только максимальную скорость max и максимальное ускорение max . В этом случае можно подобрать эквивалентные 3 режимы гармонического входного воздействия. Вначале нужно найти такой режим, который соответствует максимальным значениям амплитуды скорости и ускорения: 2max max . k , g max (4) max max По этим величинам можно построить контрольную точку Ak (рис. 2) в соответствии с (3). L Децибелы 20 Ak Запретная область 40 0 ωk ω ω0 Рис. 2. ЛАХ с контрольной точкой Область, расположенная ниже контрольной точки Ak и двух прямых (рис. 2) с наклонами 20 и 40 дБ/дек, представляют собой запретную область для ЛАХ следящей системы с астатизмом любого порядка. При работе со скоростями и ускорениями, не превышающих max , ошибки следящей системы не будут значений max и превосходить значения xmax , если ЛАХ будет проходить не ниже запретной области. Среднечастотная часть ЛАХ должна пересекать ось частот с наклоном -20 дБ/дек, причем этот отрезок ЛАХ обычно ограничивается с левой стороны отрезком с наклоном -40 дБ/дек, а с правой -40 дБ/дек, или -60 дБ/дек, в зависимости от наклона ЛАХ нескорректированной системы. Для определения границ среднечастотного участка вводится понятие базовой частоты 0 4 max xmax . По базовой частоте вычисляется частота среза M ср 0 . M 1 где M – показатель колебательности, который характеризует склонность системы к колебаниям. 2 , 3 , По частоте срезу определяются частоты соответствующие началу и концу среднечастотного участка M 1 M 1 2 c ; 3 c . M M Типовая структура желаемой ЛАХ изображена на рис. 3. L(ω) -20 дБ/дек L(ωk) Ak -40 дБ/дек -20 дБ/дек ωc 0 ω3 ω ωk ω2 ω0 -40 дБ/дек Рис. 3. Построение желаемой ЛАХ Желаемой ПФ на рис. 3. соответствует структура k ( 2 s 1) WЖ ( s) , s(Tk s 1)(T3s 1) где k – коэффициент усиления; T и – постоянные времени, соответствующие сопрягающим частотам: 1 1 1 2 , Tk , T3 . 2 k 3 В общем случае структура ПФ, соответствующей желаемой ЛАХ, будет иметь вид 5 1 k s 1 2 WЖ ( s ) , 1 1 1 1 s s 1 s 1 s 1 ... s 1 5 k 3 4 где k – коэффициент передачи желаемой системы, который определяется: k 10 L ( 1) 20 . (5) В случае когда k 1 с-1, величина коэффициента передачи должна быть больше, чем получается по выражению (5). При построении желаемой ПФ следует помнить, что изменение коэффициента усиления k поднимает или опускает всю ЛАХ, полиномы числителя изменяют наклоны асимптот ЛАХ на +20 дБ/дек, а каждый полином знаменателя изменяет наклоны на -20 дБ/дек. ПФ нескорректированной системы, в общем случае, будет иметь следующий вид: 1s 1 WP ( s ) r , s (T1s 1)(T2 s 1)(T3s 1)... где r – порядок астатизма нескорректированной системы, 1 , T2 , T2 , T3... – постоянные времени числителя и знаменателя. Тогда ПФ корректирующего устройства в соответствии с формулой (1) будет определяться выражением 1 k s 1 2 WК ( s ) 1 1 1 s s 1 s 1 s 1 ... k 3 4 s r (T1s 1)(T2 s 1)(T3s 1)... . ( 1s 1) Пример. Пусть система описывается ПФ вида 6 (6) 20 . s(0.1s 1)(0.05s 1) Необходимо провести синтез корректирующего звена, исходя из следующих требований к системе: W ( s) xmax 0,0033 град max 30 град/с max 30 град/c2 M 1,5. Определим параметры желаемой ПФ. Амплитуды и частота гармонического воздействия определяется по выражению (4): 2max 302 max 30 -1 30 град. k 1 с , g max max 30 max 30 Координата контрольной точки Ak определяется по выражению (3): L(k ) 20lg g max 30 59,08 дБ xmax 0,0033 Границы среднечастотной области: 30 1,5 30 с-1, c 30 51,96 с-1. 0,033 1,5 1 1,5 1 1,5 1 2 51,96 17,32 с-1, 3 51,96 86,6 с-1. 1,5 1,5 0 В высокочастотной области желаемая ЛАХ должна повторять наклон ЛАХ нескорректированной системы, а именно -60 дБ/дек., поэтому выбираем 4 1000 с-1 > 3 . Желаемый коэффициент усиления: k 1059,08/20 900. 7 Желаемая ПФ будет иметь вид: 900(0,058s 1) WЖ ( s ) . s( s 1)(0,01s 1)(0,001s 1) Далее по формуле (6) находится ПФ корректирующего звена. WK ( s ) 900(0,058s 1) s(0,1s 1)(0,05s 1) s( s 1)(0,01s 1)(0,001s 1) 20 (0,1s 1)(0,05s 1)(0,058s 1) 45 . ( s 1)(0,01s 1)(0,001s 1) 4. Краткое описание MATLAB Лабораторная работа выполняется в программе математического моделирования MATLAB. Программа MATLAB включает в себя пакет прикладных программ для решения технических задач и одноименный язык программирования, используемый в этом пакете. Основными компонентами системы являются базовая система MATLAB и пакет моделирования систем Simulink. Остальные пакеты расширения разбиты на 4 категории – расширения Extension MATLAB и Extension Simulink, а также комплексы пакетов расширения Blockset и Toolbox. Раздел MATLAB Extension содержит средства для подготовки исполняемых приложений MATLAB (с подключаемыми библиотеками и без них). Раздел Toolbox (инструментальные средства) содержит самое большое число пакетов расширений системы MATLAB, такие как «Control system», «Database», «Fuzzy logic», «Wavelet» и т.д. В разделе Blockset расположено несколько пакетов, относящихся к главному пакету расширения системы MATLAB-Simulink, такие как «DSP», «Fixed-Point», «Nonlinear control design» и «Power systems». В разделе Extension Simulink имеется ряд средств, предназначенных для моделирования в реальном масштабе времени и событийно-управляемом моделировании. 5. Использование MATLAB Для создания модели системы в MATLAB необходимо выполнить следующие действия: 8 1) Открыть окно новой модели Simulink, нажав File –> New –> Model. 2) Открыть библиотеку элементов, для этого нужно нажать на кнопку Library Browser. 3) Из раздела библиотеки Math и Continuous перенести в окно модели блоки для описания ПФ. 4) Выполнить соединение между блоками. 5) В меню Tools выбрать команду Linear analysis и откроется два окно: Model Inputs and Outputs (рис. 4) и LTI Viewer (рис. 4). 6) Из окно Model Input and Output извлекаем начальную и конечную точки анализируемых моделей и установим их на входы и выходы. 7) В окне LTI Viewer в меню «Edit командой Plot Configuration выберем вид отображаемого результата и установим функцию bode. 8) Для запуска анализа необходимо в окне LTI Viewer в меню Simulink выбрать команду Get Linearized model (рис. 4). 9) В появившемся окне с результатами можно нажать правой кнопкой мыши и установить характерные точки (Characteristics), сетку (Grid), а также выбрать увеличение (Zoom). Рис. 4. Логарифмические характеристики в среде MATLAB Синтез методом ЛАЧХ завершается анализом качества переходной характеристики на выходе разомкнутой и замкнутой 9 желаемой системы. 6. Задание на лабораторную работу С помощью пакета MATLAB определить ПФ корректирующего звена указанной передаточной функции с необходимыми параметрами (см. табл. 1) . Вариант задания назначается преподавателем. Таблица 1 Варианты заданий № п/п Передаточная функция 1 W ( s) 2 W ( s) 3 4 5 6 7 8 t ПП M , xmax max max % град рад/c рад/ с2 200 0,8 1,35 s(0,1s 1)(0,02 s 1)(0,01s 1) 30 12 25 2 0,6 1,19 20 0,6 0,2 0,6 32 (0,05s 1)(0,1s 1)(0,2 s 1) 282 W ( s) s(0,1s 1) 363 W ( s) s(0,1s 1)(0,02 s 1) 900 W ( s) s(0,08s 1)(0,02 s 1) 1500 W ( s) s(0,05s 1)(0,02 s 1) 20 W ( s) s(0,1s 1)(0,05s 1) 100 W ( s) s(0,5s 1) ,с - 1,5 37 0,1 20 5 - 1,5 37 1 5 2 - 1,5 37 0,5 10 2 - 1,5 37 0,1 150 750 - 1,5 37 120 30 30 0,2 1,2 20 5 2 2 7. Методика выполнения задания Порядок выполнения работы: 1. Составить модель нескорректированной системы используя передаточную функцию из таблицы 1. 2. Построить переходную характеритику нескорректированной системы, оценить устойчивость системы, время переходного процесса и перерегулирование. 3. Рассчитать параметры для построения желаемой ЛАХ, 10 получить ПФ желаемой системы. 4. Получить ПФ корректирующего устройства. 5. Составить модель скорректированной системы в MATLAB. 6. Построить переходную характерстику скорректированной системы и оценить устойчивость системы, время переходного процесса и перерегнулирование. 8. Требования к содержанию и оформлению отчета Отчет по лабораторной работе должен содержать: а) титульный лист; б) ЛАЧХ нескорректированной системы и переходной характеристики; в) ЛАЧХ желаемой системы с обоснованием ее параметров и переходной характеристики; г) ЛАЧХ корректирующего устройства и переходную характеристику скорректированной системы; д) выводы по проделанной работе; е) ответы на контрольные вопросы. Контрольные вопросы 1. Что понимают под синтезом корректирующего устройства? 2. Что понимается под располагаемой ЛАХ? 3. С каким наклоном среднечастотная область пересекает ось частот? 4. Что понимает под астатизмом системы? 11