Кинематика. Способы задания движения. Скорость точки
реклама

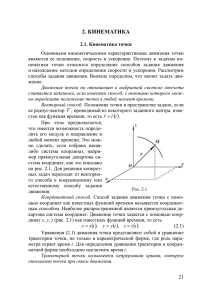
http://teormex.net 7 Кинематика Кинематика – раздел механики, в котором изучаются движение материальных тел с геометрической точки зрения, без учета массы и действующих на них сил. Способы задания движения точки: 1) естественный, 2) координатный, 3) векторный. Траектория точки – непрерывная кривая, которую описывает точка при своем движении. Естественный сп. указывается траектория точки, закон ее движения по этой траектории, начало и направление отсчета дуговой координаты: s=f(t) – закон движения точки. При прямолинейном движении: х=f(t). Координатный сп. положение точки в пространстве определяется тремя координатами, изменения которых определяют закон движения точки: x=f1(t), y=f2(t), z=f3(t). Если движение в плоскости, то два уравнения движения. Уравнения движения описывают уравнение траектории в параметрической форме. Исключив из уравнений параметр t, получаем уравнение траектории в обычном виде: f(x,y)=0 (для плоск-ти). Векторный сп. положение точки определяется ее радиус-вектором z r r (t ) , проведенным из какого-либо центра. Кривая, которая выr k черчивается концом какого-либо вектора, назыв. годографом этого O y вектора. Т.е. траектория – годограф радиус-вектора. Связь между j i r x i y j z k координатным и векторным способами: , x ( i , j, k – орты – единичные вектора, сонаправленные с какой-либо осью) x модуль r x 2 y 2 z 2 , направляющие косинусы: cos(x, r ) и т.д. r t Переход от координатного способа к естественному: s x 2 y 2 z 2 dt . 0 d r r – первая производная от радиус-вектора Скорость точки. Вектор ск-сти: v dt dx dy dz v i j k . по времени (точка обозначает производную по времени); dt dt dt dx dy dz x , v y Проекции скорости: v x y , v z z . Модуль скорости: dt dt dt v v v 2x v 2y v 2z , направляющие косинусы: cos(x, v) x и т.д. Если модуль скоv рости не изменяется с течением времени, то движение называется равномерным. ds ds s – модуль скорости, вектор скорости: v , – При естественном сп.: v dt dt орт касательной, т.е. скорость всегда направлена по касательной к траектории. Если v>0, то движение происходит в сторону положительного отсчета дуговой координаты и наоборот. Движение в полярной системе координат: r=r(t) – полярный радиус, =(t) – угол. Проекции скорости на радиальное направление v r r , поперечное направление v p r , модуль скорости v r 2 r 2 2 ; x=rcos, y=rsin. http://teormex.net 8 dv dv d 2 r 2 v r , [м/сек2]. Проекции уск.-я: a x x v x x Ускорение точки. a dt dt dt a и т.д. Модуль уск.-я: a a 2x a 2y a 2z , направляющ. косинусы: cos(x, a ) x , и т.д. a При задании движения в полярных координатах: проекции ускорения на радиальное 2r , модуль ускоренаправление a r r r 2 , поперечное направление a p r ния a a 2r a 2p . При естественным сп. задания движения полное ускорение рас кладывают на нормальное и касательное (тангенциальное) ускорения: a a n a . v2 , – радиус кривизны траектории, нор мальное ускорение направлено по нормали к траектории ( к касательной) всегда к y центру кривизны, т.е. в сторону вогнутости. Нормальное аx ускорение характеризует изменение скорости по направлеx dv d 2 s 90o аn нию. Модуль касательного ускорения a , направа dt dt 2 лено по касательной к траектории, либо в сторону скорости, n либо в обратную. Касательное ускорение характеризует изменение скорости по величине. При ускоренном движ-ии а аy направление касат. уск. и скорости совпадают, при замедлен ном – противоположно. a n a , a a 2n a 2 . Вектор ускорения лежит в соприкасающейся плоскости его проекция на бинормаль равна 0 (главная нормаль лежит в соприкасающейся плоскости, т.е. в плоскости плоской кривой, бинормаль – к главной нормали и касательной). Частные случаи движения точки: 1) Прямолинейное: радиус кривизны = (бесконечно большой) аn=0, a=a. 2) Равномерное криволинейное движ-ие: v=const a=0, a=an. Уск. появляется только за счет изменения направления скорости. Закон движ-ия: s=s0+vt, при s0=0 v=s/t. 3) Равномерное прямолинейное движ-ие: а=a=an=0. Единственное движ-ие, где а=0. a t 2 4) Равнопеременное криволинейное движ-ие: a=const, v=v0+at, s s 0 v 0 t . 2 При равноуск. движении знаки у a и v одинаковы, при равнозамедленном – разные. Простейшие движения твердого тела: поступательное и вращение вокруг неподвижной оси. Поступательное движение тела – такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельное самой себе. При поступат. движ. все точки тела описывают одинаковые траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Вращательное движение тела – такое движение твердого тела, при котором все точки, принадлежащие некоторой прямой, неизменно связанной с телом, остаются неподвижными. Эта прямая называется осью вращения тела. При этом движении все точки тела движутся в плоскостях, перпендикулярных оси вращения, Модуль нормального ускорения: a n http://teormex.net 9 и описывают окружности, центры которых лежат на оси вращения. Урав-ние (закон) вращательного движ.: =f(t) – угол поворота тела в радианах. (1 рад= 180о/=57,3о). d , [рад/с] – определяет быстроту изменения угла поворота. Угловая ск-сть: dt Вектор угловой скорости тела, совершающего вращение вокруг неподвижной оси, направлен вдоль оси вращения так, что если смотреть ему навстречу вращение буn дет против час. стрелке. "n"– число оборотов в мин. [об/мин], 1об=2 рад, . 30 d d 2 , [рад/с2]. Вектор углового ускорения Угловое ускорение тела: dt dt 2 также направлен вдоль оси вращения. При ускоренном движении совпадает по направлению с угловой скоростью и противоположно при замедленном вращении. Частные случаи вращения тела: 1) Равномерное вращение: =const, =t, =/t, t 2 2) Равнопеременное вращение: =0+t; 0 t , здесь начальный угол 0=0. 2 v r – Скорости и ускорения точек вращающегося тела. z а v скорость любой точки твердого тела, вращающегося вокруг aц неподвижной оси, равна векторному произведению вектора С aвр М R угловой скорости тела на радиус–вектор этой точки. Модуль векторного произведения: v=rsin()= (CM), (СМ) – расr стояние от точки М до оси вращения. Направлен вектор скоy рости по касательной к окружности, по которой перемещаетО x ся точка М, в сторону вращения. i j k Формулы Эйлера: v r x y x i ( y z z y) j(z x x z) k ( x y y x ) , x y z x,y,z – проекции вектора угловой скорости. Проекция вращательной (окружной) скорости: vx=yz – zy; vy=zx – xz; vz=xy – yx. Если ось вращения совпадает с осью z, то vx= – y; vy=x. Ускорение: a r v r ( r ) . Враща тельное ускорение a вр r , модуль вращат. уск. авр=rsin, направлено по касательной к траектории точки, т.е. параллельно скорости. Центростремительное (осестремительное) ускорение a ц v ( r ) , ац=2R, направлено по радиусу к оси (центру) вращения. Модуль полного уск.: a (a ц ) 2 (a вр ) 2 R 2 4 . a вр Угол, между векторами полного и центростремит-ного ускорений: tg ц 2 . a