1.1. Элементы кинематики 1.1.1. Механическое движение
реклама

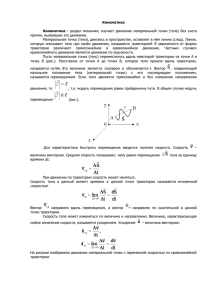
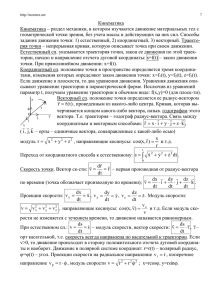
1.1. Элементы кинематики 1.1.1. Механическое движение. Предмет механики. 1.1.2. Представление о свойствах пространства и времени в классической механике. 1.1.3. Кинематическое описание движения. 1.1.4. Скорость и ускорение при криволинейном движении. 1.1.5. Поступательное движение абсолютно твердого тела. 1.1.6. Вращение абсолютно твердого тела вокруг неподвижной оси. 1.1.7. Вращение абсолютно твердого тела вокруг неподвижной точки. 1.1.1. Механическое движение. Предмет механики. Движение - всякое изменение вообще. Простейшей формой движения является механическое, под которым понимается изменение с течением времени положение тел или их частей друг относительно друга. Раздел физики, занимающийся изучением закономерностей механического движения и взаимодействия тел, называется механикой. Механика классическая релятивистская квантовая кинематика статика динамика При построении теории физика заменяет реальные объекты их идеализированными моделями, приблизительно правильно передающими не все свойства реальных объектов, а только те из них, которые существенны в рассматриваемом круге вопросов. Простейшим объектом, движение которого изучает классическая механика, является материальная точка. Материальная точка - макроскопическое тело, размерами которого можно пренебречь по сравнению с расстояниями до других тел. Понятие материальной точки является абстракцией. При решении конкретных задач всегда приходится мысленно выделять из множества тел только те, которые играют в данной задаче существенную роль. Механической системой называется выделенная совокупность рассматриваемых тел. Любое протяженное тело или систему тел, образующих 1 исследуемую механическую систему можно рассматривать как систему материальных точек. При рассмотрении задач, где деформации тела при его взаимодействии с другими телами пренебрежимо малы, используют модель - абсолютно твердое тело. Абсолютно твердое тело - тело, расстояние между любыми двумя точками которого всегда остается неизменным. Абсолютно твердое тело можно представить в виде системы материальных точек, жестко связанных между собой. В гидродинамике при изучении механики жидкостей используют еще одну модель - жидкость рассматривают как сплошную среду, непрерывно распределенную в пределах потока (движущейся жидкости), отвлекаясь от молекулярного строения самой жидкости. Под частицей среды понимают физически малый элемент объема среды. 1.1.2. Представление о свойствах классической механике. пространства и времени в Для однозначного определения положения исследуемого тела в произвольный момент времени необходимо выбрать систему отсчета. Система отсчета - совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение, и отсчитывающих время часов. В качестве пространственной системы отсчета можно взять произвольное твердое тело и связать с ним оси декартовой прямоугольной системы координат. Тогда положение точки М будет определяться тремя координатами х, у, z. Три координаты (x, y, z) можно определить как один направленный отрезок или радиус-вектор r . Радиус-вектором точки называется вектор, проведенный из начала координат в данную точку. Всякий вектор можно представить в виде суммы любого числа слагаемых, называемых составляющими вектора. Разложим вектор r на составляющие по координатным осям. r xi yj zk , где x, y, z - компоненты вектора; i , j , k - единичные векторы (орты) координатных осей. 2 При рассмотрении явлений, происходящих вблизи поверхности Земли, можно убедиться в неравноценности различных направлений в пространстве (тело всегда падает вниз, а для движения по горизонтали ему необходимо сообщить скорость). Эта неравноценность направлений в пространстве вызвана тем, что Земля притягивает к себе тела. На значительном расстоянии от Земли и звезд, т.е. в пространстве свободном от больших тел все направления движения равноценны, т.е. свободное пространство изотропно, в нем нет выделенных направлений, обладающих особыми свойствами. Свободное пространство однородно, т.е. в нем нет точек, обладающих особыми свойствами. Однородным является и время, т.е. любые явления, происходящие при одних и тех же условиях, но в разные моменты времени, протекают совершенно одинаково. 1.1.3. Кинематическое описание движения. Пусть в некоторой системе отсчета материальная точка движется произвольно. Линия, которую описывает материальная точка при своем движении, называется траекторией. Форма траектории зависит от выбора системы отсчета. В зависимости от формы траектории различают прямолинейное движение и движение по окружности и т.д. 3 При движении точка в каждый момент времени имеет определенные координаты, т.е. координата есть функция времени. Вид этой функции есть закон движения. x f ( x ) ; r r (t ) ; r f (t ) . Пусть материальная точка, двигаясь вдоль некоторой траектории, переместилась из положения 1 в положение 2. Расстояние S(t), отсчитанное вдоль траектории называется длинной пройденного пути. Длина пути не может быть отрицательной, т.е. S S12 S 23 S 32 . Вектором перемещения точки за промежуток времени от t1=t до t2=t1+t называется приращение радиуса вектора r этой точки за рассматриваемый промежуток времени: r r2 r1 r (t 2 ) r (t1 ) . Вектор перемещения направлен вдоль хорды, стягивающей участок траектории. Вектор перемещения по модулю может быть равен или быть меньше, чем пройденный путь r S ( t ) . Знак «=» соответствует прямолинейному движению. Элементарное перемещение, т.е. перемещение по прямой: dr dS ; т.к. dr dr dS , где - единичный вектор касательной. 1.1.4. Скорость и ускорение при криволинейном движении. Рассмотрим движение материальной точки по криволинейной траектории. Положение движущейся точки на траектории будем задавать радиусом вектором r . В момент времени t1=t точка находится в положении М1 с радиусом-вектором r1 r (t ) . Через промежуток времени t, т.е. t2=t+t она переместится в положение М2 с радиус вектором r2 r (t t ) . Итак, за малый промежуток времени радиус-вектор получил приращение r r2 r1 . Средняя скорость движения определится: 4 r r ( t t ) r ( t ) с ред . t t Устремим t к 0, тогда получим, что производная радиус-вектора по времени: r dr r v - мгновенная скорость. lim е 0 t dt Мгновенной скоростью называется производная радиуса-вектора по времени. Вектор скорости направлен по касательной к траектории в точке, где находится материальная точка в данный момент времени, в ту сторону, в которую движется материальная точка. Скорость измеряется в м/с. Вектор скорости можно представить как сумму нескольких слагаемых: v v x i v y j v z k или v r x i yj zk , следовательно dx dy dz ; v y ; vz . dt dt dt Компоненты скорости равны производным соответствующих координат по времени. Определим ускорение материальной точки при криволинейном движении. Отметим следующую формальную аналогию между скоростью и ускорением. Из произвольной точки О1 будем откладывать вектор скорости движущейся точки. Конец вектора скорости v назовем скоростной точкой. Геометрическое место скоростных точек есть кривая, называемая годографом скорости. vx Ускорение a направлено по касательной к годографу скорости. Ускорение измеряется в м/с2. Ускорение есть скорость движения скоростной точки по касательной к годографу скорости. На основании этого можно утверждать, что все соотношения, полученные для скорости справедливы и для ускорения, если произвести следующую замену. Материальная точка радиус-вектор r траектория скорость v Скоростная точка вектор скорости v годограф ускорение а Ускорение определяется как производная скорости по времени или как вторая производная радиус-вектора по времени: 5 v dv d dr d 2 r a lim . dt dt dt dt 2 t 0 t Выразим a через компоненты: a a x i a y j a z k , в то же время a xi yj zk , следовательно, d2y d 2z d2x a x 2 ; a y 2 ; az 2 . dt dt dt Компоненты ускорения равны вторым производным координат по времени. В общем случае, когда траектория точки кривая, вектор a удобно разложить на две составляющие: вдоль касательной к траектории и вдоль главной нормали n (орт нормали), т.е. по базису и n: a a a n или a a 2 a n2 , так как a a n , где а - касательное (тангенциальное) ускорение, аn - нормальное (центростремительное) ускорение. Определим a , an . Представим вектор скорости в виде: v v , тогда dv d dv d a ( v ) v , dt dt dt dt где d - приращение орта касательной к траектории, соответствующее элементарному пути dS=vdt. dS соответствует участку соприкасающейся окружности радиуса R с центром в точке О’, которому соответствует центральный угол dS vdt d . R R То есть при перемещении по траектории на dS, вектор касательной поворачивается на угол d и получает приращение d. Ввиду малости d получаем d d 2 sin d и d n . 2 6 d d v При dt 0 n n. dt dt R dv v dv v 2 Таким образом, a v n n . dt R dt R dv Итак, a - характеризует быстроту изменения модуля скорости; dt 2 v an n - характеризует быстроту изменения направления скорости. R 1.1.5. Поступательное движение абсолютно твердого тела. Движение, при котором прямая, соединяющая любые две точки тела (жестко связанная с телом), остается при его движении параллельной своему первоначальному направлению, называется поступательным. Для кинематического описания поступательного движения абсолютно твердого тела достаточно рассмотреть движение одной какой-либо его точки, так как траектории точек идентичны и могут быть совмещены при параллельном переносе. За время dt радиусы-векторы всех точек тела при поступательном движении изменяются на drA drB drC dr . Все точки тела имеют одинаковые скорости и ускорения: dr drA drB v v A vB , dt dt dt dv dv A dv B a a A aB . dt dt dt 1.1.6. Вращение абсолютно твердого тела вокруг неподвижной оси. Движение твердого тела, при котором все точки прямой ОО’ жестко связанной с телом, остаются неподвижными, называется вращением тела вокруг неподвижной оси ОО’. ОО’ - ось вращения. При таком движении все точки тела описывают окружности, центры которых лежат на одной прямой ОО’, и их плоскость перпендикулярна ОО’. Положение тела в пространстве полностью округляется значением угла поворота вокруг оси вращения из некоторого начального положения тела. 7 Мерой перемещения тела за малый промежуток времени служит вектор элементарного поворота тела d d d . d направлен вдоль оси вращения по правилу правого винта: из конца вектора d поворот тела виден происходящим против часовой стрелки. Угловой скоростью тела называется физическая величина, равная отношению вектора элементарного поворота тела к продолжительности этого поворота. d d , , (рад/с или с-1). dt dt Промежуток времени, в течение которого тело, равномерно вращаясь (=const), совершает один оборот, называется периодом вращения: 2 T , (с). Частота вращения показывает, сколько оборотов за единицу времени совершает тело, равномерно вращаясь с угловой скоростью : n 1 , Т 2 (об/с или с-1). Вектор, характеризующий быстроту изменения угловой скорости, тела называется угловым ускорением: d , (рад/с2). dt Определим связь между линейными и угловыми характеристиками. При повороте тела на d точка М переместится по дуге окружности радиуса R на расстояние dS dR . Тогда связь между v и определится: dS dR v R . dt dt Все точки тела вращаются с одинаковыми скоростями: 1 2 3 4 , но v1 v2 v 3 v4 , так как R1 R2 R3 R4 . Очевидно, что чем дальше отстоят точки тела от оси вращения, тем большими линейными скоростями они обладают. Вектор скорости найдем как dr v r R , так как r ОА R ; OA =const и векторы ОА и dt коллениарны. Ускорение 8 dv d (R ) d dR a R R R , dt dt dt dt где a R - касательное ускорение; an R - центростремительное ускорение. По модулю: v2 an R , R 2 a R . 1.1.7. Вращение абсолютно твердого тела вокруг неподвижной точки. Движение твердого тела, при котором только одна точка О остается все время неподвижной, называется вращением вокруг неподвижной точки О. Все точки тела движутся по поверхностям концентрических сфер, центры которых находятся в точке О. Поэтому такое движение называют еще и сферическим. В каждый момент времени такое сферическое движение рассматривается как движение вокруг оси вращения, положение которой изменяется с течением времени, поэтому она называется мгновенной осью вращения. Тело при таком движении совершает независимые вращения вокруг трех взаимно перпендикулярных осей, проходящих через точку О; для задания положения тела в пространстве необходимо задать положения трех независимых координат (углы Эйлера). 9