ОПТИМАЛЬНОЕ НАБЛЮДЕНИЕ СПЕЦИАЛЬНЫХ СИСТЕМ С
реклама

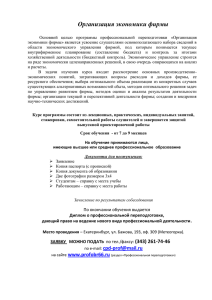
Математика и информатика УДК 517.977 П.В. МАКЕВИЧ ОПТИМАЛЬНОЕ НАБЛЮДЕНИЕ СПЕЦИАЛЬНЫХ СИСТЕМ С ЗАПАЗДЫВАНИЕМ Method of optimal observation of special type time-delay systems is proposed; the example is adduced. 1. Пусть - промежуток наблюдения, (N - натуральное число), - кусочно-непрерывные - орт с единицей на Рассмотрим динамическую систему функции; -м месте; с - запаздывание. запаздыванием, положения x(t) = , которой изменяются согласно уравнению Назовем пару Каждому состоянием (1) в момент t. , соответствует единственное решение x(t), уравнения (1). Будем считать, что начальное состояние системы (1) неизвестно, априорная информация о нем имеет вид где - неизвестный (векторный) параметр начального состояния с ограни­ ченным множеством возможных значений: Сле­ дуя [1], множество V назовем априорным распределением параметра v. 73 Вестник БГУ. Сер. 1. 2007. № 2 Для уменьшения априорной неопределенности за системой (1) ведется наблю­ дение с обработкой сигналов измерительного устройства где - непрерывная функция; - ошибки измерения. Пусть - сигнал измерительного устройства (3), записанный в некотором про­ цессе наблюдения. Апостериорным распределением параметра v, соответствующим сигналу , назовем множество таких и только таких параметров при которых начальное состояние может вместе с некоторыми возможными ошибками измерения породить записанный сигнал Элементы множества называются апостериорными параметрами. При решении целого ряда линейных задач оптимального управления в условиях неопределенности [2] используются линейные оценки множества : Вычисление оценок (4) будем называть задачей оптимального (апостериорного') наблюдения (ОН) системы (1) — (3); вектор — экстремачьным параметром. Рассмотрим текущий момент наблюдения и записанный к этому моменту сигнал измерительного устройства риорное распределение налу Апосте­ параметра v, построенное по текущему сиг­ будем называть текущим распределением. Текущий параметр определим равенством Пусть - множество всех сигналов устройством (3) к моменту ционал позволяющий вычислять которые могут быть записаны Позиционным решением задачи (4) назовем функ­ текущие экстремальные оценки для всех позиций которые могут возникнуть в процессе наблюдения. Рассмотрим конкретный процесс наблюдения, по ходу которого записывается сигнал Функцию ционного решения (5). Получение , назовем реализацией пози­ , с помощью заранее (до начала на­ блюдения) синтезированного позиционного решения называется ОН по принципу замкнутого контура. Эта проблема не решена даже для систем без запаздывания ( =0). Цель статьи - описать для объектов вида (1) - (3) метод ОН в реальном времени [3, 4], в котором функционал (5) не строится, а каждый элемент , его реализации вычисляется с помощью оптимального эстиматора в процессе наблю­ дения за время, не превышающее h. Для систем без запаздывания данная задача решена в [1]. 2. Пусть - фундаментальная матрица [5] системы (1): - единичная диагональная матри­ ца). Положим 74 Множество назовем опорой задачи (4), если [6]; если , то - пустая опора по определению; пара - опорный параметр. При фиксированном сопровождают: 1) ошибки измерения где - траектория системы (1), (2) с параметром v; 2) функция потенциалов вектор оценок = псевдопараметр псевдотраектория Пусть Момент псевдоошибки измерения - траектория системы (1), (2) с параметром назовем точкой минимума функции если точкой максимума, если через обозначим множества точек минимума и максимума соответственно; Критерий оптимальности опоры. Для оптимальности опоры обходимо и достаточно, чтобы на некоторых сопровождающих ее нялись соотношения не­ выпол­ . При этом 3. Двойственный метод построения экстремального параметра представляет итеративное преобразование опор. Начальная опора произвольная. Итерация метода основана на принципе уменьшения меры неоптимальности опоры [6]. Прежде чем переходить к описанию итераций, найдем рабочие формулы для вычис­ ления функции и ее приращения Используя фор­ мулу Коши, для псевдотраектории получим Применим к этому выражению квадратурную формулу: - квадратурные коэффициенты функции Введем аппроксимацию С этой целью разобьем Т на промежутки Пусть - конечно- параметрическая аппроксимация векторной функции Положим Выберем совокупность точек обновления и занесем в память значения Обозначим через Аналогично для каждого ции решение уравнения выберем на участке аппроксима­ функции 75 Вестник БГУ. Сер. 1. 2007. № 2 и запомним значения Обозначим через решение уравнения Положим Для любого можно найти такие разбиения аппроксимации и точки обновления при которых выполняются Функции неравенства назовем квазиредукииями функций соответственно. Рабочие формулы для вычисления значений , имеют вид Итерация (7) строится на основании формул (10), (11) по аналогии с работой [7]. При этом используется априорная информация и текущая инфор­ мация Построение может сопровождаться интегрированием систем (8), (9) на небольшом количестве промежутков длины h. 4. Приведем алгоритм работы оптимального эстиматора. В качестве начальной опоры в каждый текущий момент наблюдения он использует оптимальную опору построенную для момента В начальный момент времени Построение реализации позиционного решения для текущего момента отли­ чается от аналогичной задачи для момента т только дополнительным ограничением где находим по формуле (10). Таким образом, для вычисления элемента реа­ лизации позиционного решения помимо текущей информации, нужны значения При их построении достаточно проинтегрировать на промежутке системы (8) и (9) с начальными усло­ виями соответственно. Эстиматор подсчитывает и проверяет, является ли т точкой экстремума. Если это так, то полагает и заносит в память значения , В случае, когда неравенства (12) выполняются, имеет место ра­ венство метр 76 . В противном случае вычисляется экстремальный пара­ , корректируя двойственным методом Математика и информатика При малых h построение требует небольшого числа итераций, для каждой из которых достаточно интегрировать уравнения (8) и (9) на коротких про­ межутках времени. При этом основные вычисления допускают распараллеливание. 5. Рассмотрим систему, описывающую подачу топлива в камеру сгорания [8]: Здесь - отклонение (от номинального) давления в камере сгорания, отклонение скорости инжекции и сгорания, момент t, - отклонение давления в канале, - - отклонение расхода массы в - неизвестный па­ раметр. За системой (1) ведется наблюдение при помощи измерительного устройства - ошибки измерения). Данная математическая модель сводится к системе (1) - (3). Для стационарной системы (13) фундаментальная матрица зависит от одного параметра: Следуя общей схеме, для построения квази­ редукции промежуток Г был разбит на 4 равные части, на каждой из которых функция a(t)F(t) была аппроксимирована многочленами 4-й степени. Использова­ лась одна точка обновления Точность квазиредукции составила = 0,0076. Предполагалось, что ис­ тинное значение параметра реа­ лизовавшая функция ошибок измерения имела при при вид t < 7, t 7. Качество приближенного ре­ шения (рисунок) оценивалось с помощью точного решения задачи ОН системы (13), (14). Погрешность полученных оценок апостериорного рас­ пределения конечного поло­ жения не превысила 0,03. 1. Г а б а с о в Р . , Д м и т р у к Н . М . , К и р и л л о в а Ф. М . // Изв. АН ТиСУ. 2002:.№ 2. С. 35. 2. Г а б а с о в Р . , Д м и т р у к Н . М . , К и р и л л о в а Ф. М .// Тр. Ин-та математики и механики УрО РАН. 2004. Т. 10. № 2. С. 35. З . Г а б а с о в Р . , К и р и л л о в а Ф . М .// Докл. НАН Беларуси. 2004. Т. 48. № 1. С. 15. 4 . Г а б а с о в Р . , К и р и л л о в а Ф. М . // Докл. НАН БССР. 1990. Т. 34. № 9. С. 777. 5.Х ей л Дж . Теория функционально-дифференциальных уравнений. М., 1984. 6. Г а б а с о в Р . , К и р и л л о в а Ф . М . , Т я т ю ш к и н А . И . Конструктивные методы оптими­ зации. В 5 ч. Ч. 1. Линейные задачи. Мн., 1984. 7. Г а б а с о в Р . , К и р и л л о в а Ф . М . , М а к e в и ч П . В .//Докл. НАН Беларуси. 2006. № 1. 8. М a n i t i u s К. // IEEE Trans. Automat. Control. 1984. Vol. 29. № 12. Поступила в редакцию 28.03.06. Павел Вацлавович Макевич - аспирант кафедры методов оптимального управления. Научный ру­ ководитель - доктор физико-математических наук, профессор кафедры методов оптимального управле­ ния Р. Габасов. 77