УДК 62-83 (043) Параметрический синтез системы управления двухдвигательного асинхронного электропривода центробежных насосов
реклама
 Параметрический синтез системы управления двухдвигательного асинхронного электропривода центробежных насосов")
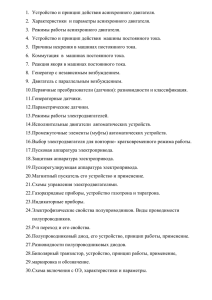
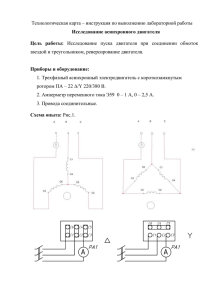
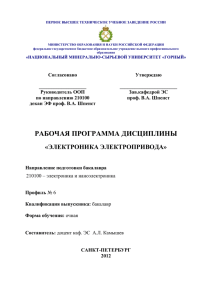
УДК 62-83 (043) Параметрический синтез системы управления двухдвигательного асинхронного электропривода центробежных насосов Алмуратова Нургуль Канаевна В статье разработана система управления двухдвигательным асинхронным электроприводом с системой «преобразователь частоты – асинхронный двигатель. Бұл мақалада қос қозғалтқышты асинхронды электржетегін басқарудың «жиілікті түрлендіргіш – асинхронды қозғалтқыш» жүйесі орындалған. In this paper control system of double-motor asynchronous electric drive with “Frequency Converter – Induction Motor” system was developed. Одной из основных задач проектирования систем управления многодвигательных электроприводов является задача синтеза параметров системы управления. Ранее [1] рассматривались задачи синтеза систем автоматических управления электроприводами на ЭВМ, которые включают в себя три основные задачи. Это задачи: функциональный синтез, параметрический синтез и структурно – параметрический синтез. В зависимости от постановки задачи проектирования системы управления электроприводом переменного или постоянного тока может быть использован соответствующий синтез автоматической системы управления электроприводом. В данной статье рассматривается задача параметрического синтеза разработанной системы управления двухдвигательного асинхронного электропривода центробежных насосов, структурная схема, которой в среде MATLAB представлена на рисунке 1. Рисунок 1 - Структурная схема двухдвигательного электропривода центробежных насосов Двухдвигательный асинхронный электропривод центробежных насосов содержит два идентичных двигателя. В структурной схеме (рисунок 1) каждый асинхронный двигатель с короткозамкнутым ротором представлен двумя динамическими звеньями: интегрирующим и инерционным звеньями, охваченные жесткой отрицательной обратной связью [2]. Каждый асинхронный двигатель питается от одного преобразователя частоты. Основная обратная связь двухдвигательного асинхронного электропривода создана на основании суммирующего сигнала обратных связей скоростей двигателей и суммирования полученного сигнала с обратной связью с регулятора скорости. Регулятор скорости, в структурной схеме модели, представлен в виде П – регулятора. Синтез параметров системы управления двухдвигательного асинхронного электропривода осуществляется при заданных параметрах каждого асинхронного двигателя. Требуется определить значения следующих параметров: для П – регулятора коэффициент передачи k pc , для преобразователя частоты коэффициент передачи ( k P ), для основной обратной связи коэффициент ( kOC ), коэффициент обратной связи с регулятора скорости ( c1 ) и коэффициента усилителя с выхода сумматора обратных связей по скорости асинхронных двигателей ( c2 ). Расчетные уравнения для решения задачи синтеза параметров системы управления, замкнутого двухдвигательного асинхронного электропривода, можно представить следующей системой дифференциальных уравнений при статическом моменте M C =0: dx1 x2 ; dt dx2 100 x3 20 x2 100 x1; dt dx3 1000k P (k PC /(1 k Pc kOC c1 ))U ((0.2k PC kOC c2 ) /((1 k Pc kOC c1 )) x1 dt ((0.2k PC kOC c2 ) /((1 k Pc kOC c1 )) x4 1000 x3 ; (1) dx4 x5 ; dt dx5 100 x3 20 x5 100 x4 , dt где x1 1 ; x2 y1 ; x3 U P ; x4 2 ; x5 y2 ; - приращение скорости вращения двигателя; Up - приращение напряжения с выхода ПЧ; y вспомогательная переменная; kW коэффициент обратной связи по скорости. Численные значения параметров двигателя выбраны из [2]. Расчет указанных параметров системы управления осуществлялся на основе алгоритма параметрического синтеза [3], приведенный на рисунке 2. Рисунок 2 - Структурная схема алгоритма параметрического синтеза Процедура вычислений заключается в следующем: 1. Вводятся исходные данные: величина шага h xi по каждой переменной xi , начальное приближение функции многих переменных f 1e 9 , случайные значения коэффициентов aij квадратичной формы функции S aij xi x j с использованием датчика случайных величин; 2. Проверяется условие выполнения неравенства численного значения переменной xi ; 3. Вычисляются частные производные функции S по каждой переменной xi ; 4. Вычисляются численные значения правой части системы дифференциальных уравнений d i dxi / dt ; описывающая динамику переходных процессов двухдвигательного электропривода; 5. Вычисляется минимум функции методом сканирования, f представляющая собой сумму функции Ляпунова V и её полной производной dV / dt; ; 6. Вычисляется новые численные значения переменных xi xi h с передачей управления счета на проверку условия не превышения заданной верхней границы переменных xi ; 7. В случае невыполнения условия выводятся численные значения искомых параметров системы управления. 8. При полученных численных значениях параметров осуществляется расчет кривых переходного процесса скорости по дифференциальным уравнениям (1) методом Рунге – Кутта [4]; 9. Для визуального наблюдения за качеством переходных процессов графики переходных процессов выводятся на экран дисплея. На рисунке 3 представлены графики скорости и момента асинхронного двигателя, а также результаты расчета параметров системы управления. Рисунок 3 - График переходного процесса скорости двигателя и рассчитанные параметры системы управления Отметим, что график переходного процесса скорости асинхронного двигателя и значения параметров выдаются на соответствующие окна MATLAB одновременно. По качественным характеристикам кривой переходного процесса скорости двигателя выбираются рассчитанные параметры системы. Вывод 1. Разработана система управления двухдвигательным асинхронным электроприводом с системой «преобразователь частоты – асинхронный двигатель». 2. Система управления обеспечивает согласование скоростей асинхронных двигателей и малую чувствительность к возмущающим воздействиям. Список литературы 1. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, Ленингр. отд – ние, 1982. 2. Терехов В.М., Осипов О.И. Системы управления электроприводов. – М.: Издательский центр « Академия», 2008. 3. Сагитов П.И., Тергемес К.Т., Шадхин Ю.И. Параметрический синтез системы управления многодвигательного асинхронного электропривода. //Вестник Алматинского университета энергетики и связи. – 2011. - №2(13). 4. Алексеев Е.Р., Чеснокова О.В. MATLAB 7. –М.: НТ Пресс, 2006.