169 повышение точности измерения магнитных моментов
advertisement

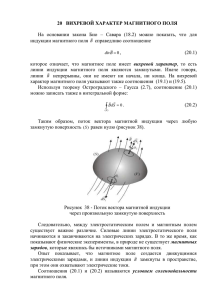
Метрологія-2014 Харків ПОВЫШЕНИЕ ТОЧНОСТИ ИЗМЕРЕНИЯ МАГНИТНЫХ МОМЕНТОВ АППАРАТУРЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ С.В. Петров, А.В. Ерисов Государственное учреждение «Институт технических проблем магнетизма Национальной академии наук Украины» 61106, Харьков, ул. Индустриальная, 19, тел/факс (057) 99-21-62 Measurement of own magnetic moments of the space equipment is actual now. For this purpose, the measuring facilities based on measurement of the magnetic induction, created by the equipment in the set points of surrounding space, are generally used. The improved option of measuring facilities allowing to increase measurement accuracy is offered. ВВЕДЕНИЕ Измерение магнитных моментов является особенно актуальным при создании современных малогабаритных космических аппаратов (КА), предназначенных для дистанционного зондирования поверхности Земли и геофизических исследований. Здесь требуется создание высокоточных систем управления ориентацией КА, учитывающих все возмущающие механические факторы, действующие на КА при его движении на околоземной орбите. Одним из этих факторов является вращающий момент, возникающий в результате взаимодействия собственного магнитного поля КА с магнитным полем Земли. Поэтому при создании таких КА необходимо обеспечить, во-первых, уменьшение магнитных моментов конструктивных узлов и аппаратуры до допустимых уровней, и, во-вторых – экспериментальное измерение фактических значений магнитных моментов, как отдельных образцов аппаратуры, так и КА в целом [1],[2]. Абсолютная погрешность измерения магнитных моментов должна быть на уровне 10 -2 ÷ 10 -3 А∙м2, а в некоторых случаях еще меньше. Так, при оценке требований к платформам микро- и наноспутников, предназначенных для длительных измерений магнитного поля Земли [3], была обоснована желательная погрешность определения магнитного момента не более 10 -4 А∙м2. В докладе рассмотрены вопросы повышения точности измерения магнитных моментов. ОСНОВНАЯ ЧАСТЬ Наиболее распространенные методы определения магнитных моментов основаны на измерении векторов индукции Bk магнитного поля в определенных k точках сферической или цилиндрической поверхности [4] , внутри которой (рис. 1) расположена испытываемая аппаратура, и последующего расчета вектора магнитного момента. Точки измерения Bk а) б) Рисунок 1 – Точки измерения векторов индукции Bk на цилиндрической (а) и сферической (б) поверхности вокруг испытываемой аппаратуры. 169 Метрологія-2014 Харків Измеренные значения векторов индукции Bk позволяют по определенному алгоритму определить компоненты магнитного момента. При этом точность определения магнитного момента будет определяться точно стью измерения индукции магнитного поля Bk в заданных точках, количеством точек измерения и возможностями алгоритма их обработки. Методической основой таких измерительных установок является представление индукции B магнитного поля, создаваемого испытуемой аппаратурой за пределами сферической поверхности радиуса R0 , в которую вписывается аппаратура, в виде сходящейся суммы ряда сферических пространственных гармоник [5]: Br n 1 m 0 B B n n1 R n 2 n 1 n 2 n 1 m 0 R m n n 1 m 0 Rn 2 g m n g m n cos m g m n cos m hnm sin m Pnm cos hnm sin m (1) dP dcos (2) P sincos (3) sin m hnm cos m m n m n где: Br B ,и B - составляющие индукции магнитного поля космического аппарата в k - той точке с координатами Rk , k , k при выбранном начале системы сферических координат, совпадающем с центром испытуемого объекта (рис. 2а). g nm , hnm - коэффициенты, характеризующие распределение источников магнитного поля внутри аппаратуры; Pnm cos - присоединенные полиномы Лежандра. Коэффициенты g10 , g11 и h11 в соотношениях (1-3) интерпретируются как магнитные моменты космического аппарата M z M x и M y , соответственно. На рисунке 2а показана часто используемая на практике измерительная установка [6], содержащая 4 датчика магнитного поля. а) б) Рисунок 2 – Известное (а) и предлагаемое (б) расположение датчиков индукции магнитного поля и испытуемой аппаратуры. Для рассматриваемой измерительной установки (Рис. 2а) определение каждой из компонент магнитного момента производится по результатам измерения 4-мя датчиками индукции в направлении соответствующей оси координат. Например, компонента M x определяется из выражения M x Bsx R 3 6 170 (4) Метрологія-2014 Харків Здесь Bsx BX 1 BX 3 BX 2 BX 4 где B X 1 , B X 2 B X 3 , B X 4 - компоненты индукции, измеренные датчиками 1-4 соответственно. Структура уравнений ряда (1-3) такова, что с увеличением расстояния R относительный вклад магнитных моментов M z ( g10 ), M x ( g11 ) и M y ( h11 ), в индукцию Bk будет возрастать. Поэтому измерение индукции магнитного поля желательно выполнять на максимальном удалении от центра установки, с последующей интерпретацией полученных результатов измерений как индукции обусловленной исключительно магнитным моментом испытуемой аппаратуры. Погрешность такого измерения вызвана тем, что измеряемая величина индукции Bsx , кроме информации о магнитном моменте M x , содержит также информацию об: индукции магнитного поля от пространственных гармоник Bm более высоких порядков ( n 2 ), магнитной помехе Bпом , которая присутствует на испытательной установке. С учетом этого, а также (1-3) соотношение (4) можно представить в виде: M x M x 1 m пом (5) где: M x - истинная величина компоненты магнитного момента в направлении оси x; m Вm R 3 6 Bsx - погрешность определения магнитного момента M x , определяемая пространственными гармониками объекта порядка n 2 . пом Впом R3 6 Bsx - погрешность определения магнитного момента M x , определяемая индукцией Bпом магнитной помехи на испытательной установке. Значения высших пространственных гармоник определяются расположением источников магнитного поля в объеме аппаратуры, которое, как правило, неизвестно при проведении измерений. Снижение погрешности пом требует, помимо обеспечения «магнитной тишины» на магнитоизмельном стенде, приближения датчиков к испытуемой аппаратуре, т.е. выбора как можно меньшего значения расстояния R. В этом случае возрастает индукция собственного магнитного поля аппаратуры, и вклад помехи Bпом в измеряемый сигнал Bsx будет снижаться, как это показано на рис. 3. В то же время при приближении измерительных датчиков к испытуемой аппаратуре возрастает помеха Bm от высших пространственных гармоник магнитного поля (рис.3). Рисунок 3 – Зависимости погрешностей m и пом от расстояния до датчиков. Снижение негативного влияния высших пространственных гармоник на результаты определения магнитного момента M x может быть достигнуто путем изменения расположения измерительных осей датчиков относительно испытываемой аппаратуры, 171 Метрологія-2014 Харків что позволит обеспечить дополнительную фильтрацию указанных гармоник. Анализ выражений (1-3) показывает, что для имеющейся измерительной установки (рис. 2а) величина Bsx , определяется значениями индукции нечетных ( n 1,3.5... ) пространственных гармоник магнитного поля аппаратуры. Поэтому первой значащей гармоникой индукции Bm будет третья ( n 3 ) гармоника. Это способствуют быстрому снижению индукции Bm (обратно пропорционально R5), а вместе с ней и m с увеличением расстояния R. Для уменьшения влияния высших пространственных гармоник на результаты измерений предлагается изменить расположение измерительных датчиков относительно испытываемой аппаратуры. Предлагаемое расположение измерительных датчиков приведено на рис. 2б. Для такой измерительной установки величина магнитного момента, как и ранее, будет определяться выражением (4). Анализ соотношений (1-3, 4), показывает, что при данном расположении датчиков величина Bsx , определяется пространственными гармониками магнитного поля порядка n 1,.5 ,7..... Поэтому первой значащей гармоникой, вносящей вклад в погрешность Bm , будет пятая ( n 5 ) пространственная гармоника магнитного поля испытуемой аппаратуры. Следовательно, погрешность измерений уменьшается на величину, определяемую третьей пространственной гармоникой. Таким образом, предлагаемое расположение измерительных датчиков позволяет обеспечить более высокие метрологические показатели при измерении магнитных моментов аппаратуры космического назначения. В настоящее время в ДУ «ИТПМ НАНУ» ведутся работы по модернизации существующей измерительной установки на основе изложенных принципов. ВЫВОДЫ Предложен улучшенный вариант измерительной установки, обеспечивающий повышение точности измерений магнитных моментов. Список литературы 1 В.Розов, С.Петров, А.Ерисов, А.Меланченко. Нормирование и измерение собственного магнитного поля космических аппаратов // Тезисы докладов ІІІ-й международной конференции «Космические технологии: настоящее и будущее». – Днепропетровск. – 2011. – С.45. 2 Kildishev A. V., Volokhov S. A., Saltykov J. D. Measurement of the spacecraft main magnetic parameters, AUTOTESTCON’97 Conference Proceedings. IEEE SYSTEMS READINESS TECHNOLOGY CONFERENCE. September 22-25, 1997, Anaheim, California, pp. 669-675. 3 Дудкин Ф.Л., Дудкин Д.Ф. Оценка требований к платформам микро- и наноспутников в контексте длительных измерений магнитного поля Земли // Космический проект «Ионосат-Микро» / Под ред. С. А. Засухи, О. П. Федорова. - Киев: Академперіодика, 2013. – С. 53-65. 4.Weikert, S. ; Mehlem, K. ; Wiegand, A. Spacecraft magnetic cleanliness prediction and control. Aerospace EMC, 2012 Proceedings ESA Workshop on Publication Year: 2012 , Page(s): 1-5 5 Яновский Б.М. Земной магнетизм. Том 1. – Л.: Изд-во Ленинградского ун-та, 1964. – 445 с. 6 ГОСТ Р 50012. Электрооборудование силовое. Методы измерения параметров низкочастотного периодического магнитного поля. 172