К вопросу структурного синтеза плоских механизмов
реклама

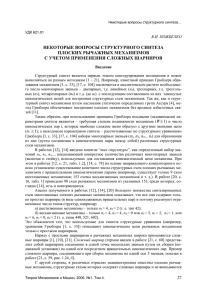
К вопросу структурного синтеза плоских механизмов УДК 621-01 А.А. РОМАНЦЕВ К ВОПРОСУ СТРУКТУРНОГО СИНТЕЗА ПЛОСКИХ МЕХАНИЗМОВ Данная статья является по сути дела продолжением работ [1], [2], [3]. В ней излагаются размышления автора относительно структурного синтеза плоских рычажных и рычажнокулачковых механизмов. В основу проектирования механизмов предлагается взять усовершенствованную структуру плоских базовых геометрических систем, приведенную в работе [3] на стр. 71 (таблица 1, лист 5/5). Разработанная структура представлена таблицей 1. В основу ее построения принята классификация подвижных фигур геометрической системы, представленная таблицей 2. Построение базовой системы производится путем наложений определенного числа связей на элементы M, N, K, L подвижной фигуры, исходя из условия, что общее число связей должно равняться трем (поскольку строится система с нулевой степенью подвижности в относительном движении). Так, например, для получения базовой системы I (см. таблицу 1) достаточно точку М совместить с неподвижной точкой Q, а точке N приписать перемещение по линии Н. В этом случае общее число связей, наложенных на движение фигуры согласно таблице, приведенной в работе [2] на стр. 353 будет равно трем. В таблице 1 неподвижные объекты обозначены точками T, Q, G и линиями Нi. Построение геометрических систем на основе таблицы 1 сводится к последовательной замене линии Li и Нi на окружность и прямую. Следует особо отметить, что в местах соприкасания двух линий в процессе построения геометрической системы одна из линий должна быть заменена только окружностью (например, в базовой системе II-Б см. таблицу 1). В противном случае (например, соприкасание двух прямых) будет изменено общее число связей. В итоге система не будет обладать нулевой степенью подвижности. На основе базовой системы I (см. таблицу 1) возможно построить две геометрические системы, придавая линиям Н вначале форму окружности, затем форму прямой. Одна из таких систем показана на рис. 1, а. На ее основе возможно построить группу звеньев с нулевой степенью подвижности в относительном движении путем замены подвижных соединений геометрических объектов эквивалентными кинематическими парами, т.е. выполнить конструктивное оформление подвижных соединений. Построенная таким способом группа показана на рис. 1, б, представляющая собой потенциальный механизм. Чтобы получить реальный механизм, необходимо группу звеньев с W=0 преобразовать в одно (двух) подвижную систему. Существует несколько способов выполнения таких преобразований. Один из них заключается в снижении числа связей в одной из кинематических пар рассматриваемой группы. Например, из геометрической системы следует, что на точку М подвижной фигуры наложены две связи. Для того чтобы получить одну связь можно предположить, что точка М перемещается по некоторой линии J. Форма такой линии может быть окружность, прямая или дискретная (т.е. линия задана координатами составляющих ее точек). В первом случае получим шарнирный четырехзвенник (рис. 1, в), во втором случае – кривошипно-ползунный механизм (рис. 1, г). Перемещение точки М по дискретной прямой J можно конструктивно оформить с помощью высшей пары. В результате получим рычажно-кулачковый механизм (рис. 1, д). Возможно также получить перемещение точки М по линии J введением дополнительного звена – кулисы 3 (рис. 1, е). Из рис. 1, б следует, что преобразование кинематической пары в точке С позволит получить аналогичные механизмы. Здесь получение новых кинематических схем не предвидится. Теория Механизмов и Машин. 2013. №1. Том 11. 65 Синтез механизмов Таблица 1 Базовые геометрические системы с нулевой степенью подвижности I III-В VI-A IV-А VI-Б III-A IV-Б VI-В III-Б V VI-Г II-A 66 II-Б http://tmm.spbstu.ru К вопросу структурного синтеза плоских механизмов Обозначение Состав фигуры Обозначение Состав фигуры I Точки МиN IV Точки М, N и линия L II Точка М и линия L V Точки М, N, K III Точка М и линии L1 и L2 VI Линии L1, L2, L3 Эскиз Эскиз В рассматриваемой группе (рис. 1, б) возможно одновременное преобразование кинематических пар в точках М и С с целью снижения общего числа связей. В результате такого преобразования получим шарнирно-рычажный пятизвенный двухподвижный механизм. Здесь за обобщенные координаты возможно принять углы α и β поворота звеньев 3 и 4 соответственно (рис. 1, ж). Итак, на основе группы звеньев, показанной на рис. 1, б, возможно построить пять кинематических схем механизмов: три одноподвижных (рис. 1, в; 1, г; 1, д) и двухподвижных (рис. 1, е и рис. 1, ж). В процессе проектирования перед конструктором стоит задача создания кинематической схемы механизма, предназначенного для воспроизведения конкретной целевой функции, т.е. создания либо направляющего, либо передаточного механизмов. Для решения поставленных задач можно воспользоваться схемами механизмов, показанными на рис. 1. Так, например, для создания направляющего механизма можно применить схему, показанную на рис 1, д. Допустим, требуется создать механизм для воспроизведения шатунной линии J, заданной уравнением y f x . (1) Приняв за обобщенную координату величину Хi перемещения точки М по линии J, находят из (1) соответствующие значения Yi. Используя координаты Мi(xi, yi), вычисляются соответствующие им координаты точек Ni и Ki (расчетные формулы приводятся в работах [1]; [2]; [3]). Здесь значения Ki(xi, yi) будут представлять дискретную линию F. Поменяв местами положения точек М и K, получают трехзвенный направляющий механизм (рис. 2, а). Допустим, необходимо спроектировать механизм, предназначенный для воспроизведения функциональной зависимости угла β поворота ведомого звена от угла α поворота ведущего звена, выраженной уравнением f . (2) Теория Механизмов и Машин. 2013. №1. Том 11. 67 Синтез механизмов Рис. 1: а) геометрическая система (I, таблица 1); б) группа звеньев с нулевой степенью подвижности в относительном движении; в) шарнирный четырехзвенник; г) кривошипноползунный механизм; д) рычажно-кулачковый механизм; е) кулисный механизм; ж) шарнирно-рычажный пятизвенный механизм Для решения этой задачи целесообразно воспользоваться схемой, показанной на рис. 1, ж. Задаются значения αi, и из (2) находятся соответствующие им значения βi . За обобщенные координаты механизма (см. рис. 1, ж) принимаются значения αi и βi, и по ним находятся положения точек М, С, K, N. Полученные таким образом координаты Ki(xi, yi) определят дискретную линию F. Поместив в точку K высшую пару, получают пере- 68 http://tmm.spbstu.ru К вопросу структурного синтеза плоских механизмов даточный механизм, показанный на рис. 2, б. Его степень подвижности определяется по формуле W 3n 2 p2 p1 3 1 2 5 1 1 . (3) Здесь повороту звена 3 на угол α будет соответствовать поворот звена 4 на угол β. Точность воспроизведения функции (2) будет зависеть от точности изготовления механизма. На основе приведенных данных можно сделать вывод: на основе одной группы звеньев с W=0 возможно построить как направляющий, так и передающий механизмы. Недостатком приведенных на рис. 2 механизмов является наличие в них высшей пары. В университете разработана программа преобразования геометрии дискретной линии F в прямую или окружность с целью замены высшей пары на низшую. В основу программы положено последовательное изменение свободных параметров механизма, приводящих к изменению формы линии F. На основе проведения экспериментальных расчетов автором сделан вывод: наибольший эффект достигается в случае преобразования линии F в прямую. Здесь погрешность в результате замены высшей пары на низшую составляет 1–1,5 мм (расстояния между точками расчетной и преобразованной линии F). Заменив дискретную линию F на прямую, получают новые кинематические схемы направляющего и передаточного механизмов, показанные на рис. 3. Рис. 2. Кинематические схемы: а) направляющего, б) передаточного механизмов Здесь воспроизведение целевых функций (1) и (2) будет осуществляться с некоторой погрешностью. Величина погрешности будет зависеть от степени приближения формы линии F к прямой линии. При построении геометрических систем возможны частные случаи. Так, например если в базовой системе V (см. таблицу 1) линиям Н1 и Н2 придать форму прямых и их совместить, то получим геометрическую систему, показанную на рис. 4. Рис. 3. Кинематические схемы механизмов, предназначенные для воспроизведения целевых функций с некоторой погрешностью: а) направляющие, б) передаточные механизмы Теория Механизмов и Машин. 2013. №1. Том 11. 69 Синтез механизмов Рис. 4. Частный случай геометрической системы, полученной на основе базовой системы V Возможны также варианты соединения двух базовых систем. Например на рис. 5, а показаны две базовые системы I (см. таблицу 1). Учитывая, что линии Н1 и Н2 имеют абстрактную форму, возможно совместить путем наложения друг на друга. В результате получим новую систему, показанную на рис. 5, б. Рис. 5: а) Две одинаковые геометрические системы I (см. таблицу 1); б) Создание новой геометрической системы путем соединения двух систем I В заключение следует отметить, что таблица 1 содержит, по мнению автора, информацию, позволяющую построить множество групп звеньев с W = 0. На их основе создать множество кинематических схем плоских направляющих и передаточных механизмов. На основе таблицы 1 автором получено около девяноста геометрических систем и примерно столько же групп звеньев с W = 0. На основе вышесказанного можно сделать вывод, что в процессе исследований механизм рассматривается как геометрическая система, «одетая» в металл. СПИСОК ЛИТЕРАТУРЫ 1. Романцев А.А. Механические системы с переменной степенью подвижности // Теория механизмов и машин. 2010 №2 (16). Том 8. С. 59-70. 2. Романцев А.А. Повышение точности воспроизведения целевых функций. // Современное машиностроение. Наука и образование: Материалы Междунар. науч.практ. конференции. – СПб.: Изд-во Политехн. ун-та, 2011. – С. 352-359. 3. Романцев А.А. К вопросу создания единой системы подвижных соединений. // Теория механизмов и машин. 2012 №2 (20). Том 10. С. 72-76. Поступила в редакцию 29.12.2012 70 http://tmm.spbstu.ru