На правах рук - Национальный исследовательский университет
реклама

НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ
«МИЭТ»
На правах рукописи
Литманович Дмитрий Михайлович
Оптико-волоконное устройство обработки видеоинформации для
организации управляющих интерфейсов автоматизированных систем
Специальность: 05. 13. 06
Автоматизация и управление
технологическими процессами и производствами (в приборостроении)
Диссертация
на соискание ученой степени
кандидата технических наук
Научный руководитель
Доктор технических наук, заведующий кафедрой
МЭ НИУ МИЭТ, профессор С. П. Тимошенков
Москва, 2016 г.
Оглавление
Введение……………………………………………………………………..……4
ГЛАВА 1. АНАЛИЗ ВОЗМОЖНОСТЕЙ ИСПОЛЬЗОВАНИЯ
ИНТЕГРИРУЕМЫХ СВЕТОВОДОВ ДЛЯ ПОСТРОЕНИЯ ОПТИКОЭЛЕКТРОННЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ ……….……………..……14
1.1. Классификация оптических световодов для интегральной оптики…….14
1.2. Основные оптические эффекты, приводящие к распространению
электромагнитной волны .................................................................................... 17
1.2. Основные технологии формирования планарных световодов ................ 21
1.3. Формирование световодов контактной фотолитографией ...................... 22
1.4. Световоды в печатных платах на основе оптических стекол .................. 25
1.4. Оптоэлектронная печатная плата с отражающими элементами
и внутренним монтажом волокна ...................................................................... 38
1.5. Световоды на основе оптических пленок .................................................. 41
1.6. Оптоэлектронные световоды на кристалле и оптические
элементы ИС ........................................................................................................ 42
1.7. Оптические световоды на основе оптического геля................................. 44
1.8. Выводы .......................................................................................................... 51
ГЛАВА 2. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ
ОБЪЕКТА НА ОСНОВЕ ОПТИЧЕСКИХ СВЕТОВОДОВ………………….52
2.1. Обоснование оптической схемы измерений ............................................ 52
2.2. Технологическое обоснование конструкции............................................. 70
2.3. Выводы по главе ........................................................................................... 77
2
ГЛАВА 3. ТЕОРЕТИЧЕСКОЕ ИССЛЕДОВАНИЕ ФУНКЦИОНИРОВАНИЯ
СИСТЕМЫ………………………………………………………………………79
3.1. Структурная схема преобразования информации……………….…….. . 79
3.2. Моделирование распределения оптической мощности ........................... 81
3.3. Основные выводы по главе: ........................................................................ 93
ГЛАВА 4. РАЗРАБОТКА И ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ ОПТИКО
ЭЛЕКТРОННОЙ СХЕМЫ………………………………………………..……94
4.1. Основные технические решения по использованию теневых
составляющих для определения положения объекта ...................................... 94
4.2. Интеграция оптоэлектронного устройства с «системой
на кристалле». .................................................................................................... 107
4.3. Основные выводы по главе: ...................................................................... 113
Заключение…………………………………………………………………….102
Список литературы……………………………………………………………117
3
Введение
Актуальность проблемы.
Применение оптико-электронных измерительных устройств, используемых в автоматике в системах автоматизированного управления, имеет большую
историю. Ее началом можно считать инфракрасные системы наведения, появившиеся в годы 2-й мировой войны, построенные на базе электровакуумных приборов [1]. Развитие полупроводниковых технологий, позволило далее создать
ряд оптико-электронных преобразователей, в том числе матричных и линейчатых приемников излучения на основе ПЗС-структур [2] и позиционно-чувствительных диодов (PSD) [3].
Разработано огромное количество оптических схем, в основе которых лежат оптико-электронные преобразователи данного типа. Это схемы измерения и
контроля геометрических размеров деталей при их производстве [4], системы
определения пространственного положения роботов [5] и манипуляторов [6], оптико-электронные и телевизионные системы измерения дальности и ориентации
в системах управления положением объектов [7,8,9].
Невозможно представить себе систему автоматизированного управления
сложными промышленными или военными комплексами, без использования
сенсорных панелей, интегрированных со средствами отображения информации,
в том числе с матричными экранами [10]. Расширение их функциональности достигается развитием нового типа интерфейсов, основанных на интуитивно понятном «жестовом» управления. При этом возможно появляется новый тип взаимодействия пользователя с рядом технических систем бытового назначения.
Примером этого может служить так называемый «умный дом», в котором, человек может программировать систему на включение и выключение устройств,
расположенных в комнате, простым жестом руки. Это может быть стереосистема
или светильник, термостат, кондиционер или фоторамка [11].
4
Отдельный класс устройств, представляют системы оцифровки объектов в
задачах анализа трехмерных сцен, получивших большое применение в киноиндустрии [12], игровых приложениях [13], и в системах управления доступом [14].
Использование так называемой структурированной подсветки [15], позволило
создать новый класс устройств, таких, как например 3D-сканеры [16] и игровые
контроллеры [17]. Путем интеграции импульсных методов лазерного измерения
дальности в ПЗС структуры, были получены так называемые Z- камеры, позволяющие построить наряду с изображением окружающей сцены и карту распределения дальности [18].
Столь бурное развитие техники обработки видеоинформации, вызвало появление ряда технических решений в направлении интеграции приемника изображения, с устройствами его обработки. Наиболее общий пример такой интеграции – размещение на одном кристалле телевизионной ПЗС-матрицы и схемы кодирования в телевизионный стандарт вида PAL/NTSC [19]. Еще более впечатляющий пример интеграции матричного сенсора со схемой обработки – микросхема сенсора оптической мыши, впервые разработанная фирмой Agilent
Technologies (США) [20]. Эта микросхема включает в себя фотодиодную матрицу низкого разрешения (от 16х16 до 32х32 элементов), и цифровой корреляционный измеритель, позволяющий определить направление смещения, регистрируемого сенсором изображения фрагмента поверхности, проецируемого на него
с помощью специальной оптики [21,22].
Однако существует ряд оптико-электронных измерительных систем, в которых их интеграция с вычислительной структурой затруднена, в связи с большим размером сенсорной области. К ним относятся так называемые сенсорные
панели, о которых шла речь выше, и которыми снабжаются платежные и справочные терминалы, промышленные контроллеры и прочие устройства организации интерактивного взаимодействия оператора с программным обеспечением.
Основными оптическими схемами определения точки касания являются либо система триангуляции, построенная на двух телевизионных датчиках изображения,
5
либо система, использующая набор приемных и передающих инфракрасных приемников-излучателей, образующих над сенсорной поверхностью измерительную
сетку [23].
Известен подход, используемый для обмена данных между интегральными схемами на печатной плате, посредством формирования оптических сигналов в диэлектрических световодах, образующих оптическую шину передачи
данных. Принципиальными преимуществами диэлектрических световодов по
отношению к металлическим проводникам являются: на несколько порядков
большая ширина полосы пропускания (до 100 ГГц на канал), низкий уровень рассеиваемой мощности даже при высоких тактовых частотах, отсутствие емкостных задержек и нечувствительность к электромагнитным помехам [24].
Идея использования этого подхода для создания сенсорных информационных систем не нова и защищена рядом иностранных патентов. Технические
решения, заложенные в них, рассматриваются далее во второй главе данного исследования.
Развивая этот подход, автором предложена специализированная оптиковолоконная вычислительная структура, реализующая человеко-машинный интерфейс, и размещаемая на единой печатной плате. Данное решение позволяет
в одном технологическом цикле, интегрировать оптическое сенсорное поле с вычислительным устройством.
Предлагаемое автором техническое решение не имеет мировых аналогов,
что подтверждено патентом РФ № 2486608 от 27.06.2013 и проведенным в рамках его экспертизы (ФИПС РФ) патентным поиском.
Цели и задачи диссертационной работы.
Цель представленной диссертационной работы заключается в разработке
и исследовании интегрированного человеко-машинного интерфейса для управления техническими системами.
Поставленная цель достигается благодаря решению следующих основных
задач:
6
• Разработать функциональную и оптико-геометрическую схемы устройства для определения пространственного положения объекта контроля;
• Обосновать метод интеграции разработанной структуры в печатную
плату, объединяющую в себе как сенсорную поверхность, планарные световоды
и матричный фотоприемник, так и вычислительное устройство, реализующее интерфейс с системой управления;
• Исследовать процесс формирования освещенности входных апертур
планарных световодов, пространственно разнесенными ИК-излучателями, и решить задачу оптимизации их геометрического положения.
Кроме того, для решения этих задач в диссертации необходимо рассмотреть технологические проблемы использования световодов для межсоединений
сенсорной поверхности с матричным фотоприемником. Ядром данной системы
является волоконно-оптический узел, объединенный с матричным фотоприемником и вычислительной компонентой в единый модуль, изготавливаемый в
рамках общего технологического процесса.
Таким образом, решение поставленных в диссертационном исследовании
задач, может привести к созданию нового типа сенсорных устройств, предназначенных для построения интерфейсов взаимодействия человека с техническими
системами.
Содержание работы
Во введении показаны актуальность темы диссертации, цель и задачи диссертационной работы, научная новизна, практическая значимость, апробация и
публикации работы и приведено краткое содержание по главам.
В первой главе рассматривается возможность использования световодных каналов передачи информации, интегрируемых в печатную плату, в измерительную систему пространственного положения.
7
Рассмотрены получившие наибольшее распространение методы формирования оптических световодов, включая такие методы как лазерное спекание, лазерное спекание, лазерную печать, струйную печать опто-гелем и формирование
контактной фотолитографией.
Рассмотрены основные свойства планарных световодов и типы активных
и пассивных оптических элементов, которые можно реализовать при помощи оптических световодов.
Так же проведен обзор основных отечественных и зарубежных работы в
области создания оптоэлектронных печатных плат.
В обзоре отмечены исследования Хеннинга Шредера из подразделения
Института интегральных схем общества Фраунгофера по микроинтеграции. Из
отечественных работ по данной тематике следует особо отметить работы В.Я.
Панченко и В.И. Соколова из Института проблем лазерной техники РАН.
По результатам обзора и анализа существующих технологий выбрана технология внутреннего монтажа оптического волокна, которая позволит создать
эффективную систему переноса информации светового поля к фотоприемнику,
упростив тем самым создание оптико-электронной измерительной системы.
Во второй главе проведена классификация и обзор существующих оптико-электронных измерительных систем. Рассмотрен принцип коммутации зондирующих потоков, оптически сопряженных с оптоволоконной структурой.
Предложены оптико-геометрическая и функциональная схемы, позволившие
техническую реализацию высокоинтегрированного интерфейсного устройства.
Проведен математический анализ образования теневых сегментов и показана
возможность повышения точности измерений на основании частичного затенения входных апертур.
В третей главе приводится результаты по разработке математической модели энергетических характеристик оптико-волоконной системы. Проведено моделирование в среде Matlab, позволившее получить распределение освещенности входных апертур световодов как функции оптической мощности излучателей
и их диаграмм направленности. Результаты моделирования позволяют по задан8
ной геометрии входных апертур, оптимизировать пространственное расположение используемых излучателей.
В четвертой главе приведены результаты технической реализация рабочего прототипа для исследования интегрированного интерфейса. Для визуализации измерительного процесса, в прототип входит цветной матричный приемник
изображения, оптически сопряженный с набором полимерных оптоволокон. Разработана схема сопряжения матричной камеры с вычислительной системой на
базе ПЛИС. Разработано специальное программное обеспечение в среде Delphi,
обеспечившее визуализацию работы системы в реальном времени.
Методы исследования
Для решения поставленных задач в работе использованы: программный
пакет «Matlab», при моделировании в работе применялись отдельные разделы
общей физики (геометрическая оптика и светотехника), среда разработки ПО
Embarcadero Delphi, САПР Mentor Graphics для разработки топологии печатной
платы, пакет разработки проектов ПЛИС на базе XILINX ISE 14.7 и PlanAhead
2015.1.
Научная новизна диссертации:
• Предложен ряд функциональных и оптико-геометрических схем
интегрированного
устройства
для
организации
человеко-машинного
интерфейса, защищенные патентами РФ на изобретения;.
• Разработана
научно-обоснованная
математическая
модель
распределения оптической мощности на входных апертурах планарных
световодов;
• Исследована математическая модель энергетических характеристик
системы, позволившая получить оптимальные значения углов наклона излучателей к поверхности расположения входных апертур.
9
Практическая
значимость
работы
заключается
в
следующих
результатах:
• Разработана
сенсорного
функциональная
устройства
на
и
основе
оптико-геометрическая
световодов,
для
схемы
определения
пространственного положения;
• Предложена методика проведения эксперимента на опытном образце
устройства для подтверждения достоверности математической модели.
• Реализован интерфейс между оптическим образом, формируемым на
сенсорной поверхности и вычислительным устройством;
• Разработана структура вычислительного устройства, реализующую человеко-машинный интерфейс, выполненная в виде «система-на-кристалле»
(СнК/SoC);
• Проведено компьютерное моделирование процесса формирования оптических потоков, создающих сенсорное поле;
• Проработан метод формирования оптических межсоединений с использованием планарных световодов или оптического волокна;
• Выработаны требования к программному обеспечению, и разработан тестовый прототип устройства обработки видеоинформации;
• Программное обеспечение ПЛИС и ПК, входящих в опытный образец
устройства, использовано в лабораторных работах курса “Анализ и управление
HDL-проектом”.
На основе предложенных автором технических решений и математической
модели, был разработан макет, включающий в себя оптико-волоконный модуль,
матричный фотоприемник сбора распределенной информации светового поля и
вычислительное устройство.
Новизна технических решений, полученных в ходе
данного
исследования, подтверждена патентами РФ на изобретения № 2541849 от
28.01.2013 г., №2542949 от 24.05.2013 г., №2486608 от 27.06.2013 г., №2542947
от 28.11. 2014 г., №2556734 от 20.07. 2015 г. и №2566958 от 15.08.2014 г.
10
Личный вклад автора.
Проанализированы существующие, и разработана новая технология
формирования планарных световодов. Разработана функциональная схема
оптико-волоконного измерителя пространственного положения, интегрируемого
в печатную плату. Основными результатами работы являются:
• Представленны решения по интеграции планарных световодов в
технологические процессы производства печатных плат и создание оптических
межсоединений с оптическими ИС;
• Разработана
функциональная
и
оптико-геометрическая
схемы
сенсорного устройства на основе световодов, для определения положения
объекта контроя;
• Проведен
анализ
и
классификация
технологий
формирования
планарных световодов для использования в оптико-электронных измерительных
системах;
• Разработан и изготовлен экспериментальный стенд, позволивший
подтвердить правильность принятых технических решений и достоверность математического моделирования.
Научные положения, выносимые на защиту.
Проанализированы существующие технологии создания оптоэлектронных
печатных плат на основе планарных световодов и оптоволокна. Выведены формулы расчета положения объекта на сенсорной поверхности. Кроме того, на защиту выносятся:
• Доказанная возможность реализации устройства обработки видеоинформации в оптоволоконной измерительной системе на основе разработанных
функциональной и оптико-геометрических схем;
11
• Научно-обоснованная математическая модель распределения освещенности на входных апертурах, подтвержденная результатами, полученными на
экспериментальном стенде.
• Оптико-геометрическая схема формирования светового поля и метод
транзита теневых сегментов для задач пространственного измерения, защищенные патентом РФ на изобретение.
Апробация работы.
Основные
положения
диссертационной
работы
докладывались
и
обсуждались на следующих конференциях:
- 16-ая Всероссийская межвузовская научно-техническая конференция
«Микроэлектроника и информатика - 2009» МИЭТ г.Зеленоград 2009 г.
- Всероссийская
межвузовская
научно-техническая
конференция
«ФПННиМ-2009» г. Ульяновск 2009 г.
- 18-ая Всероссийская межвузовская научно-техническая конференция
«Микроэлектроника и информатика - 2011» МИЭТ г.Зеленоград 2011 г.
Награжден дипломом за 1-ое место в конкурсе работ аспирантов по секции
«Информационно-управляющие и вычислительные системы и приборы».
- 19-ая Всероссийская межвузовская научно-техническая конференция
«Микроэлектроника и информатика - 2012» МИЭТ г.Зеленоград 2012 г.
- 3-ая Ярмарка научно-технических и инновационных идей и проектов
молодежи «РИТМ Зеленоград», г.Зеленоград 2012 г. Награжден дипломом за 2ое место в конкурсе работ аспирантов и молодых специалистов.
- Всероссийская конференция «Исследования и разработки молодых
ученых, студентов и аспирантов в оласти электроники и приборостроения»
МИЭТ г.Зеленоград 2012 г.
- Всероссийская конференция «Фестиваль Недели науки Юга России»
г.Таганрог 2012 г.
12
- 20-ая Всероссийская межвузовская научно-техническая конференция
«Микроэлектроника и информатика - 2013» МИЭТ г.Зеленоград 2013 г.
- 5-ая Ярмарка научно-технических и инновационных идей и проектов
молодежи «РИТМ Зеленоград», г.Зеленоград 2013 г.
Публикации по работе.
Основные положения диссертационной работы опубликованы в 17 печатных
работах, в том числе 8 публикаций, входящих в список, утвержденный ВАК
(включая 6 патентов РФ на изобретение), 1 работа в иностранных источниках.
По одной заявке на изобретение принято положительное решение на выдачу патента. Без соавторов опубликовано 5 работ.
Внедрение результатов.
Работа выполнена при поддержке Минобрнауки России, Соглашение
номер
14.575.21.0069,
уникальный
идентификатор
соглашения
RFMEFI57514X0069.
Результаты разработок и исследований, полученных в диссертационной работе, нашли следующее внедрение:
- модели функционирования информационно-управляющих систем, используются при проведении лабораторных работ по курсу «Анализ и управление
HDL - проектом (HDL Designer)» кафедры МЭ НИУ МИЭТ;
- примеры заданий по разработке оптических печатных плат, используются при проведении лабораторных работ по курсу «Cхемотехническое проектирование средствами DXDESIGNER» кафедры МЭ НИУ МИЭТ;
Структура и объем работы.
Диссертационная работа состоит из введения, четырех глав, заключения,
списка литературы из 116 наименований, 3 приложений и 3 актов использования
результатов диссертационной работы. Работа содержит 116 страниц основного
текста и 80 рисунков.
13
ГЛАВА 1. АНАЛИЗ ВОЗМОЖНОСТЕЙ ИСПОЛЬЗОВАНИЯ
ИНТЕГРИРУЕМЫХ СВЕТОВОДОВ ДЛЯ ПОСТРОЕНИЯ ОПТИКОЭЛЕКТРОННЫХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
1.1. Классификация оптических световодов для интегральной оптики
Световоды являются одними из основных элементов оптических систем, в
том числе волоконно-оптических линий связи [25], волоконных лазеров [26] и
оптических усилителей [27], а также оптических фотонных ИС [28].
Общей характеристикой оптических световодов для интегральной оптики
является то, что показатель преломления материала сердцевины световода
больше, чем показатель преломления окружающей среды.
Световоды производятся с использованием многих материалов и технологий. Для реализации оптических модуляторов, переключающих матриц и регуляторов поляризации применяются оптические световоды на основе ниобата лития с применением диффузии титана [29]
Полностью пассивные световоды изготавливаются при помощи ионного
обмена в щелочно-силикатном стекле [30]. Коммерческое применение этих световодов было реализовано при производстве разветвителей и других компонентов. В последнее время большой интерес был проявлен к технологиям формирования световодов из различных полимерных материалов [31].
В [32] приведен обзор, охватывающий существующие интегрированные
оптические системы и технологии формирования планарных световодов.
Согласно ему, оптические световоды можно классифицировать по двум основным параметрам: по геометрии световода и по профилю показателя преломления в поперечном и продольном направлениях. По геометрическим характеристикам световоды делятся на две группы: регулярные и нерегулярные световоды
[33], как показано на рисунке 1.1.
14
Рисунок 1.1. Классификация световодов для интегральной оптики
К регулярным относятся световоды имеющие равномерную и гладкую границу между сердцевиной световода и окружающей средой, а также отсутствие
модуляции показателя преломления в продольном направлении. Нерегулярные
световоды имеют пространственно-периодическую модуляцию геометрических
параметров, либо показателя преломления.
Основными типами регулярных оптических световодов являются планарные и полосковые световоды. Планарные и полосковые световоды используются
в интегральной оптике для передачи оптических сигналов и для построения
устройств управления оптическими сигналами: оптических переключателей, модуляторов, коммутаторов и т. д [34].
К нерегулярным световодам относятся гофрированные, брэгговские световоды и фотоннокристаллические световоды [35]. В гофрированных световодах
имеется периодическая модуляция показателя преломления в продольном
направлении на границе световода. В брэгговских световодах сердцевина световода в продольном направлении имеет периодическую модуляцию показателя
преломления. Световоды данной группы используются в качестве световодных
15
фильтров и оптических переключателей, а также в световодных лазерах для создания положительной обратной связи [36].
По профилю пространственного распределения показателя преломления в
поперечном сечении планарные световоды делятся на две группы: со ступенчатым профилем показателя преломления и с градиентным профилем (альфа-профиль). Во второй группе световодов показатель преломления плавно изменяется
от центра световода к его границе по определенному закону. Наиболее часто используются световоды с параболическим профилем показателя преломления. В
некоторых случаях используются световоды с многослойным тонкопленочным
покрытием [37]. Такие световоды представляют собой промежуточную группу
между световодами со ступенчатым профилем и световодами с альфа профилем.
Для модовой селекции используются световоды с анизотропным показателем
преломления. Такие световоды изготавливаются из оптически анизотропных материалов, показатель преломления которых зависит от ориентации светового
луча относительно оптической оси среды. Для изготовления устройств управления оптическими сигналами в интегральной оптике используются материалы с
управляемым показателем преломления.
В основе модуляции показателя преломления под действием внешнего
управляющего сигнала наиболее часто используются электрооптический, акустооптический, термооптический, магнитооптический и нелинейно-оптические
эффекты [38].
Материал оптического световода может обладать усилением [39]. Световоды с усиливающей средой используются в световодных и волоконных лазерах
и усилителях [40].
Плазмонный световод представляет собой протяженную полоску металла
с поперечным размером и толщиной много меньшими длины волны излучения.
Особенностью плазмонных световодов является то, что оптический сигнал распространяется не внутри такого световода, а по его поверхности в виде поверхностной электромагнитной волны. Это свойство плазмонных световодов связано
16
с возбуждением в металле плазмонов [41] – резонансных колебаний плазмы свободных электронов. Применение плазмонных световодов в устройствах интегральной оптики позволяет значительно уменьшить габариты этих устройств
[42].
1.2. Основные оптические эффекты, приводящие к распространению электромагнитной волны
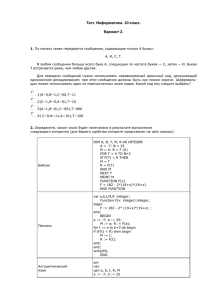
Основным свойством оптического световода является способность каналировать электромагнитную энергию оптического диапазона. В лучевом приближении это свойство световода иллюстрирует рисунке 1.2.
Рисунок 1.2. Каналирование луча в оптическом световоде
Световод на рисунке представляет собой трехслойную структуру из материалов с разными оптическими свойствами. В случае каналирования луч распространяется по центральному слою 2. Очевидно, что такое распространение луча
возможно при условии его отражения от границ между средами. Эффект полного
внутреннего отражения может возникать лишь при выполнении условия n1 > n2.
Это условие также является необходимым для каналирования излучения в большинстве диэлектрических световодов.
При распространении электромагнитных волн в тонких пленках и слоях
17
может возникать явление интерференции. В случае оптических световодов интерференция оказывает решающее влияние на характер распространения волны.
Поэтому для понимания процессов, происходящих в оптических световодах,
необходимо рассмотреть основные закономерности интерференции двух электромагнитных волн [43].
В оптических световодах интерференционные эффекты приводят к резонансному распространению электромагнитных волн и формированию световодных мод. Кроме того, явление интерференции широко используется в световодных оптических переключателях, предназначенных для управления оптическими сигналами, и в волоконно-оптических датчиках. Примером являются световодные интерферометры Маха–Цендера [44], которые широко используются в
этих устройствах.
1.3. Математическое представление оптического световода
Простейшим оптическим световодом является прямоугольный в сечении
волновод, состоящий из центрального сердечника с более высоким показателем
преломления, окруженным внешним слоем с более низким показателем преломления. Внешний слой обычно заключен в защитную оболочку. Начнем с краткого обзора типичных параметров стандартных телекоммуникационных волокон, оптических световодов и обсудим основные механизмы [45], ответственные
за распространение света [46].
На уровне электромагнитного взаимодействия с молекулами учитываются
пространственные электрические Е и магнитные Н поля и явления поляризации,
допускающие колебания соответствующих векторов (Е, Н) только в определенных плоскостях, что приводит к появлению в световоде многих (число это конечно) типов колебаний, или мод (аналогично тому, как в СВЧ-волноводе).
18
Учитывая, соблюдение "волноводных" условий распространения, длина
волны света
мкм (
c
c
в световоде имеет порядок 1 мкм, а сечение световода
<< c).
c
- 10-100
Моды световодов и оптоволокна можно разделить на связанные моды и
моды излучения. Векторы электрического и магнитного полей для них можно
представить в следующем виде:
=∑
, ,
=∑
, ,
Где;
, ,
,
и
, ,
,
и
, ,
+∑
, ,
+
, ,
+
, ,
;
;
(1.1)
(1.2)
являются векторами первичных и вторичных элек-
трических и магнитных полей,
ного поля,
+∑
и
плотность энергии электромагнит-
модальные амплитуды [23].
Если световод имеет профиль показателя преломления, который постоянен
вдоль всей его длины, то есть n=f(x,y), то такой световод называется поступательно инвариантным.
Согласно материалам, изложенным в начале главы, большинство световодов, как правило, состоит из кварцевого стекла или полимера. В данных световодах, разность показателей преломления между сердцевиной и внешним слоем
достигается добавлением соответствующих легирующих примесей и добавок
либо к сердечнику (в целях повышения его индекса рефракции) или к внешнему
слою (чтобы уменьшить его показатель преломления) [47]. Как и стандартные
оптические волокна, световоды могут быть как одномодовыми, так и многомодовыми. Выражение, по которому можно рассчитать число мод, выглядит следующим образом:
=
−
≈
19
2∆
/
;
(1.3)
где:
- Число мод; # - площадь сечения световода;$ - длина волны;
n1 - показатель преломления сердцевины, n2 - показатель преломления внешнего
слоя; ∆ - относительная разность показателей преломления.
Световод может быть только одного типа по всей длине, если < 2,405.
В стандартных телекоммуникационных волокнах, разница между показателями
преломления, как правило, достаточно мала [48], так что относительная разность
задается выражением:
∆=
)* )+
)+
;
(1.4)
Значение ∆ при этом значительно меньше единицы. Оптические световоды
и волокна, удовлетворяющие этому условию, называются слабонаправляющими.
Стандартное значение для одномодового волокна ∆~0.003 [49].
Полное внутреннее отражение является наиболее распространенным руко-
водящим механизмом распространения света в световодах, хотя другие механизмы, упомянутые в данной главе, становятся все более распространенными с
появлением микроструктурных оптических световодов [50], также называемыми
световодами на фотонных кристаллах [51].
Полное внутреннее отражение представляет собой оптическое явление, которое происходит, когда луч света падает на границы среды под углом, большим,
чем критический угол по отношению к нормали поверхности [52]. Критический
угол определяется по следующей формуле:
/с = sin
)+
)*
;
(1.5)
Учитывая, что угол преломления не может превышать 90°, получаем, что
при угле падения, синус которого больше отношения меньшего показателя преломления к большему показателю, электромагнитная волна должна полностью
отражаться в первую среду.
20
И, наконец, последним важным параметром световода является числовая
апертура [53] необходимая для эффективного ввода излучения в световод и определяемая выражением:
45 =
−
;
(1.6)
откуда можно определить максимальный телесный угол [54] приемной
апертуры:
/6 = sin
45 ;
(1.7)
Оптические световоды с большей площадью входной апертуры принимают больше излучения, чем световоды с меньшими апертурами или диаметрами. Световоды с большими апертурами больше подходят для недорогих передатчиков, таких, как светодиоды, которые не способны концентрировать выходную энергию в узкий когерентный пучок (как лазеры) и излучают под большим
углом. Однако недостатком световода с такими параметрами является большая
дисперсия (рассеяние) света, а, следовательно, и снижение полосы пропускания.
С другой стороны, световод с меньшей апертурой или диаметром будет иметь
большую полосу пропускания. Это происходит потому, что в меньшую апертуру
входят относительно параллельные лучи света и их дисперсия вдоль волокна будет меньше. Недостатком же в этом случае является необходимость в более дорогих источниках света (таких, как лазеры), предоставляющих более узкие пучки
света, и в более точной калибровке источника подсветки [55].
1.2. Основные технологии формирования планарных световодов
Оптический световод задает направление распространению электромагнитного поля через почти не несущую потерь среду. Далее будем называть поле
21
распространения как «световая волна». Здесь, как правило, применяется уравнение Максвелла, поскольку изменения коэффициента преломления
малы.
Световоды производятся с использованием многих материалов помимо оксида кремния на кремнии. Существуют большие обзоры интегрированной оптики, которые охватывают прошлые разработки технологии планарных световодов. Планарные световоды являются частью полупроводниковых лазеров и используются в полупроводниковых ИС [56].
На сегодняшний день технологии оптических световодов можно систематизировать по технологиям формирования и по конструктивному исполнению
[57]. Наиболее распространенными технологиями формирования оптических
световодов являются:
•
Контактная фотолитография;
•
Диффузионное осаждение;
•
Лазерная абляция;
•
Печать опто-гелем;
•
Внутренний монтаж волокна.
Рассмотрим далее одни из самых известных разработок, которые можно
отнести к данным технологиям.
1.3. Формирование световодов контактной фотолитографией
В Институте проблем лазерных и информационных технологий РАН, был
разработан метод формирования на печатной плате полимерных световодов [58].
Основа метода заключается в использовании контактной фотолитографии
и включает в себя следующие этапы:
1.
Формирование на поверхности печатной платы буферного полимер-
ного слоя с низким показателем преломления.
22
Буферный слой
Печатная плата
2.
Нанесение светопроводящего материала в виде жидкой композиции.
Светопроводящий слой
Буферный слой
Печатная плата
3.
Формирование на буферном слое полимерных световодов с высоким
показателем преломления путем освещения жидкой композиции УФ излучением
через шаблон [59].
ИК-излучение
Фотошаблон
Светопроводящий слой
Буферный слой
Печатная плата
4.
Заращивание полученных световодов, полимерным защитным
слоем с низким показателем преломления.
Защитный слой
Светопроводящий слой
Буферный слой
Печатная плата
23
С использованием контактной фотолитографии полимерные световоды
могут быть изготовлены на кремниевых и кварцевых подложках, а также на печатных платах. Фотография одномодовых световодов на кремниевой подложке
показана на рисунке [60] 1.2.1. Ширина световодов составляет 6 мкм,
высота – 12 мкм
Рисунок 1.3. Фотография световедущих жил одномодовых полимерных
световодов с шириной 6 мкм, сформированных на кремниевой подложке методом контактной безрезистивной фотолитографии
(Источник: ИПЛИТ РАН)
На рисунке 1.4. представлена фотография [61] массива одномодовых полимерных световодов на печатной плате, полученная с помощью сканирующего
электронного микроскопа. Ширина световедущих жил составляет 12 мкм, высота – 10 мкм, расстояние между жилами - 38 мкм.
Рисунок 1.4. Фотография массива световедущих жил одномодовых
полимерных световодов на печатной плате.
(Источник: ИПЛИТ РАН)
24
Результатом данной работы является возможность использования метода
контактной УФ фотолитографии [62] для формирования как многомодовых, так
и одномодовых световодов с шириной и высотой световедущей жилы от нескольких микрон до нескольких десятков микрон. Разрешение метода составляет около одного микрона.
1.4. Световоды в печатных платах на основе оптических стекол
Рассмотрим одну из самых известных работ, проводимых по данной тематике Институтом интегральных схем общества Фраунгофера совместно с Берлинским технологическим университетом при поддержке Министерства промышленности ФРГ [63].
Целью данных исследований является разработка технологического процесса создания планарных оптических световодов в оптическом стекле методом
диффузионного осаждения. По результатам работы предполагается, что данный
процесс удастся внедрить в стандартный технологический маршрут производства печатных плат.
Основная часть этих исследований заключена в выборе оптимального материала для формирования в нем многомодовых световодов с размерами 30 ... 70
мкм. Данные исследования были необходимы, так как выбор материала важен
для формирования световодов заданной длины и с низкими значениями оптических потерь [64]. По результатам данных исследований в качестве материала
было выбрано оптическое стекло.
Оптическое стекло отлично подходит в качестве материала основания для
создания в нем электрических и оптических межсоединений [65]. По сравнению
с обычными материалами, такими как кремний, керамика или ламинаты на основе полимеров, стекло является превосходным диэлектриком, что важно для
электрических высокочастотных межсоединений с высокой стабильностью размеров.
25
Планарные световоды сформированные в оптическом стекле, как показано
на рисунке 1.5, показали высокий потенциал интеграции, тепловой стабильности, высокие параметры спектральной прозрачности в инфракрасном диапазоне
длин волн и индекс градиента преломления оптического профиля [66]. Последний обеспечивает более низкую дисперсию и поэтому более высокую пропускную способность.
Рисунок 1.5. Оптоэлектронная печатная плата со стеклянным
центральным слоем (Источник: Fraunhofer IIS)
В данной работе использовано оптическое стекло D263T. Оптические световоды были сформированы диффузией ионов серебра через маску [67].
Прецизионная фотолитография для изготовления маски и контроль диффузионного процесса являются при этом самыми важными элементами технологического процесса [68]. Однако данный технологический процесс не подходит
для массового производства и не позволяет интегрировать его в стандартный
технологический маршрут производства печатных плат [69].
В характеристиках, имеющих отношение к производству, стекло существенно отличатся от обычных материалов для печатных плат (FR4). В частности, коэффициент теплового расширения (КТР) для стекла в четыре раза ниже,
чем для FR4, таким образом, нужно принимать меры, чтобы избежать расслоения
материала. Основной акцент в использовании стекла должен быть сделан на об-
26
щей обработке поверхности и контроле качества получения стеклянных подложек, так как они являются более хрупкими, чем FR4 в части касающейся механических повреждений. Толщина используемой стеклянной пленки определяется технологическими характеристиками производства и требованиям к геометрии световодов. В представленной работе была использована стеклянная фольга
толщиной 300 мкм с размерами 297 х 210 мм, которая меньше чем размеры стандартных заготовок для печатных плат [70].
Стек слоев представляет структуру с центральным слоем оптического
стекла со сформированными в нем световодами. Сверху и снизу данного слоя
находятся слои стандартного стеклотекстолита марки FR4, скрепленного с данным центральным слоем при помощи препрега. На самом стеклотекстолите выполнены стандартные линии металлической коммутации. Данный стек слоев
предполагает возможность использования большего числа проводящих слоев и
использования альтернативных материалов вместо FR4 (например, полиимида)
[71]. Послойная структура данного стека слоев показана на рисунке 1.6.
Верхний слой металлизации
FR4
Внутренняя металлизация
FR4
Адгезив
Световоды
Стекло
Адгезив
FR4
Внутренняя металлизация
FR4
Нижний слой металлизации
Рисунок 1.6. Стек слоев оптоэлектронной печатной платы со стеклянным
основанием
27
Были проведены испытания для определения оптимальных материалов для
данного стека слоев. По результатам этих испытаний было установлено, что такие материалы как FR4 и эпоксидные препреги обладают слишком большим значением коэффициента термического расширения [72], что может привести к образованию дефектов в стеклянном основании (в виде продольных разломов) и
соответственно в сформированных в нем световодах. Предпочтительно использовать материалы, применяемые при производстве гибко-жестких плат. Так
например для препрегов используемых в производстве гибко-жестких ПП применяются материалы с более высокой температурой стеклования, что обеспечивает низкий коэффициент термического расширения и более высокую рабочую
температуру. Эти свойства позволяют обеспечить высокую надежность платы на
стеклянном основании, даже при большом количестве слоев (более восьми). Однако как недостаток следует отметить ухудшение диэлектрических свойств самой платы, что может негативно влиять на передачу сигнала по металлическим
проводникам [73].
Так же следует отметить, что места перехода от стеклянного основания и
слоями стеклотекстолита являются точками наиболее вероятного возникновения
дефектов. Для укрепления конструкции следует уделить внимание выбору адгезивов. Наиболее подходящими материалами по результатам исследований были
выбраны эпоксидные адгезивы, акриловые адгезивы, силикон (RTV) и полисульфид [74]. Однако для некоторых приложений следует понимать, что эти материалы могут являться потенциальным источником выделения газов. Кроме того
при прессовании подобного стека необходимо учитывать такие параметры как
температура процесса и давление пресса, чтобы избежать образования перекрестных трещин в стекле во время прессования [75]. Оптимальные параметры
температуры и прессования показаны на рисунке 1.7.
28
давление
температура
40
40
40
35
30
27
30
30
32
30
30
35
30
30
30
30
27
25
20
15
10
10
10
10
10
10
10
10
2
2
0
10
20
30
40
50
60
70
80
90
100 110 120 130 140 150
2
2
10
10
10
30
30
30
30
30
10
10
10
10
0
0
температура 27
27
30
30
30
32
35
40
40
40
35
30
25
20
15
10
давление
0
0
Рисунок 1.7. График оптимальной зависимости температуры и
прессования
Отдельно следует рассмотреть формирования переходных отверстий в подобной сборке, по результатам испытаний было выбрано два метода формирования отверстий:
- Механическое сверление отверстий в гибридной сборке (FR4-СтеклоFR4)показано на рисунке 1.8.
б)
a)
Рисунок 1.8. Фотографии переходных отверстий, где: а) отверстие
диаметром 0.4 мм; б) отверстие диаметром 0.8 мм (Источник: Fraunhofer IIS)
- Сверление и металлизация отверстий в отдельных слоях с их последующим прессованием, как показано на рисунке 1.9.
29
Рисунок 1.9. Фотография металлизированного переходного отверстия
полученного путем сверления каждого отдельного слоя
(Источник: Fraunhofer IIS)
Первый способ более предпочтителен, ввиду технологичности, но он
имеет ряд недостатков. Так возможно появление дефектов в оптическом стекле,
которые могут быть результатом сверления отверстий большого диаметра.
В результате проведенных испытаний было установлено, что максимальный
диаметр отверстий при котором не возникают дефекты должен быть не
более 0,5 мм [76].
Кроме того были проведены тесты по формированию переходных отверстий с помощью лазера и через сочетание процессов механической и лазерных
обработок. Технологический потенциал подобных методов высок, и работы в
направлении тестирования и оптимизации этих процессов будут продолжены.
Второй метод формирования отверстий в ряде случаев может быть предпочтительней. В целом преимущество этого процесса заключается в том, что отверстия в стекле могут быть получены путем использования CO2-лазера. При
этом данные отверстия будет отличаться высоким качеством и точностью.
Однако данный метод сильно зависим от использования технологического оборудования.
30
Металлизации переходных отверстий происходит в три этапа (как в обычных печатных платах):
•
Кондиционирование и предварительная обработка внутреннего диа-
метра переходного отверстия;
•
Предактивация и активация для создания на поверхности слоев ди-
электрика и стекла центров активации в виде частиц палладия, являющегося катализатором процесса химического омеднения;
•
Химическое омеднение для формирования слоя меди толщиной не
менее 20 мкм.
Эксперименты с плазмохимической обработкой отверстий и последующим процессом прямой металлизации хоть и показывают многообещающие результаты, но приводят к возникновению дефектов в стекле и расслоению слоев
[77].
Данная технология прекрасно подходит для трехмерной гетерогенной интеграции и реализации комплексных и надежных микросистем, собранных на
оптоэлектронных ПП.
Исследования показали, что оптические стекла обладают отличными оптическими, электрическими, химическими и термическими свойствами. В частности, представленная технология может быть реализована на отдельном технологическом процессе для последующей сборки с уже готовыми ПП [78].
1.5. Формирование световодов методом лазерной абляции
Перспективной технологией формирования световодов на ПП является лазерная абляция [79]. Технология заключается в испарении импульсным лазером
оптического полимера, нанесенного на ПП [80].
Этапы, отображающие процесс лазерной абляции полимерного световода
изображены на рисунке 1.10. Первый этап заключается в нанесении на подложку
FR4, слоя жидкого оптического полимера, с последующей засветкой его
31
УФ-излучением для отвержения и последующего использования как световодного слоя и основания. Затем образцы сушат в печи при 80-100 °C в течение приблизительно 60 минут, чтобы гарантировать испарение влаги [81].
Эксимер-лазерная абляция оптических световодов является новым и конкурентным методом, поскольку предполагает меньшее число шагов по сравнению с другими технологиями и обладает большей гибкостью. Кроме того,
лазерная микрообработка в настоящее время используется для формирования переходных отверстий, глухих отверстий и микропереходов в производстве
печатных плат, делая технологию лазерной абляции более подходящим выбором
для интеграции технологии формирования планарных световодов на ПП.
Рисунок 1.10. Основные этапы лазерной абляции
32
Лазерная абляции осуществляется на втором шаге таким образом, чтобы
сформировать полимерный гребень между участков испаренной поверхности,
данный гребень и будет в дальнейшем исполнять роль световода. Для одного или
нескольких соседних световодов, необходимо чтобы количество канавок было
равно (N +1), где N число соседних световодов. Наконец, слой верхней оболочки
осаждают с помощью центрифугирования (или любого другого подходящего
метода осаждения), с последующей засветкой его УФ-излучением для отрждения.
Технологический процесс первого этапа подготовки и нанесения полимера
представлен на рисунке 1.11.
Ключевой особенностью эксимер-лазерной абляции является его длина
волны и длительность импульса. Последнее снижает коэффициент температуропроводности. Длительность импульса эксимерного лазера имеет значение, когда
речь идет о качестве, потому что короткая длительность лазерного импульса дает
лучше качество получаемой структуры.
Следует отметить, что используемые при создании световодов методом эксимер-лазерной абляции лазеры отличаются высокой стоимостью, делая данную
технологию не конкурентоспособной.
Решением этой проблемы может служить использование твердотельных
лазеров с активной средой на основе алюмоиттриевого граната («YAG»,
Y3Al5O12), легированного ионами неодима (Nd) и титан-сапфировых
лазеров (Ti:Sa).
Использование УФ лазера (например, эксимерного) для фотохимической
абляции, по сравнению с лазером, работающим в ИК, имеет значительные преимущества. Т.к. энергия фотона обратно пропорциональна его длине волны,
СО2-лазер на 10,6 мкм будет производить энергию более чем в 40 раз меньшую,
чем электроннопучковый KrF лазер с длиной волны 248 нм той же мощности.
При этом очевиден недостаток энергии для разрыва химических связей типичных полимеров, для которых требуется обычно 3 - 8 эВ.
33
Рисунок 1.11. Первый этап технологического процесса
Увеличение количества импульсов для увеличения требуемой энергии
приведет к кумулятивным эффектам тепла на поверхности полимера. Таким образом ясно, что эксимер-лазеры имеют правильный порядок энергии фотонов
чтобы атермически удалять полимеры, а с другой стороны, ИК лазеры имеют
34
энергии фотонов значительно ниже, чем 3 эВ, что вызывает доминирование теплового механизма при разрыве связей в полимере.
Учитывая вышеописанное, для фотохимического удаления полимерного
материала требуется лазер с максимальной длиной волны 414 нм и энергией 3
эВ. Более короткая длина волны, например, 355 нм будет гарантировать увеличение доминирования фотохимического процесса разрыва связей в полимерном
материале. С другой стороны, большая длина волны, например, 1064 нм в ИК
диапазоне не только уменьшит доминирование фотохимического растворения
полимера, но также будет инициировать процесс теплового разрыва связей в полимерном материале.
Рисунок 1.12. Образцы, обработанные при 30 Гц, лазер воздействовал на
одну точку 50 раз и передвигался со скоростью 3.6 мм/мин с энергией 80
мДж/см2 (Источник: Корпорация Dow Corning)
На рисунке 1.12 продемонстрированы полученные методом абляции выступы и канавки. Рисунок (а) показывает канавку, выполненную на подложке из
фотополимера на основе акрилата, а на рисунке (б) показаны два параллельных
трека, при травлении которых остался выступ, который и составляет световод. В
этом случае никакой верхней оболочки не применяется. На рисунке 1.13 показано поперечное сечение световода.
35
Кроме того, световоды могут быть перекрестными, под углом 90 градусов
(рисунок 1.14) или иметь другие более сложные формы
Рисунок 1.13. Поперечное сечение световода размером 50 мкм х 35 мкм
(Источник: Корпорация Dow Corning)
Рисунок 1.14. Световоды под углом 90 градусов друг к другу, полученные
механической обработкой при 100 мДж/см2, 45 воздействий лазера в точке,
при скорости 3,3 мм / мин, 25 Гц за один проход, (а) схема, (б) изображение,
полученное с помощью РЭМ (Источник: Корпорация Dow Corning)
Оптические сигналы на печатных платах должны быть направлены в разные части устройства, при этом свет должен идти как в плоскости печатной
платы, так и перпендикулярно ей. Существует множество предложений, по тому,
36
как направлять световые сигналы, к ним относятся: оптические световоды согнутые под углом 45 градусов, микролинзы, светорасщепители, микропирамиды.
Так же можно использовать вместо плоских 45 градусных микрозеркала, изогнутые микрозеркала.
Конечные грани зеркала покрываются металлом для улучшения его отражательной способности и для хорошего качества поверхности. Выбранный метод осаждения во многом зависит от образца, а также от материалов, которыми
он должен быть покрыт и от адгезии этих материалов. Кроме того, неточность
изготовления зеркала может вызвать значительное уменьшение количества
света, излучаемого из световода, который должен падать на металлическую поверхность; необходимо иметь наиболее короткий путь с минимальным количеством изгибов и отклонений луча для уменьшения потерь в световоде. На рисунке 1.15 изображены 2 типа зеркал.
Рисунок 1.15. Зеркало, отклоняющее луч, (а) МДП зеркало, используется
для отклонения выходящего сигнала из световода на границе световода и
воздуха, (б) свет отражается от металла, нанесенного на поверхность зеркала
(Источник: Корпорация Dow Corning)
В то время как интегральные схемы вертикального исполнения все совершенствуются, нет никаких сомнений в том, что будут развиваться схемы с плоскостной боковой маршрутизацией оптических сигналов. Типичная архитектура
системы потребует маршрутизацию сигналов не только в пределах одного слоя,
но и от одного слоя к другому. На рисунке 1.16 представлено схематическое
изображение зеркала в плоскости, которое может быть использовано для соединения света между несколькими компонентами в том же слое.
37
Рисунок 1.16 Изображение зеркал, находящихся под углом 45 градусов
а) для достижения угла поворота 180 градусов; б) двойное отражение луча,
которое может быть использовано для трассировки сигнала
(Источник: Корпорация Dow Corning)
Благодаря такой конструкции, стали возможными 90-градусные и кратные
90 градусам повороты луча, в таком зеркале будут потери порядка 0,5 – 1,0 дБ.
Преимуществом лазерной абляции является универсальная технология изготовления, так как позволяет создавать световоды и зеркала без значительного увеличения числа операций.
1.4. Оптоэлектронная печатная плата с отражающими элементами и
внутренним монтажом волокна
Компанией VarioOptics была разработана технология формирования оптических световодов в печатной плате, и технология внутреннего монтажа оптического волокна. Для создания оптического соединения световодов с электронными компонентами используются специализированные микрозеркала, смонтированные в тело печатной платы, как показано на рисунке 1.17.
38
Скорость передачи данных с использованием подобной технологии составляет более 10 Гбит/с на канал при величине затухания менее 0,05 дБ/см и уровнем потерь менее 1,2 дБ.
PIN фотодиод
Металлизация
FR4
Металлизация
Металлизация
FR4
Металлизация
Микрозеркало
Световод
FR4
Металлизация
Металлизация
FR4
Металлизация
Рисунок 1.17. Пример конструкции выходного отражателя с
микрозеркалом (Источник VarioOptics)
На рисунках 1.18 и 1.19 представлена печатная плата, в состав которой входит планарный световод, изображенный на рисунке 1.20 и отражающее
микрозеркало [82].
Рисунок 1.18. Отраженное от микрозеркала излучение в составе печатной
платы (Источник VarioOptics)
39
Рисунок 1.19. Оптоэлектронный преобразователь, монтируемый на печатную
плату. Фотоприемная матрица и микрозеркало расположены на обратной стороне преобразователя и направленны на срез световода
(Источник: TTM Technologies Inc.)
Рисунок 1.20. Планарный световод (Источник: VarioOptics)
Разработанная технология позволяет реализовать оптоэлектронные соединения как на обычных ПП, так и на гибких и гибко-жестких. Конструктивные
40
параметры получаемой в результате ПП зависят от выбора производственных
процессов, которые должны быть совместимы со стандартными фотолитографическими процессами производства ПП.
К недостаткам данной технологии следует отметить сложности с монтажом и позиционированием микрозеркала и фоточувствительных элементов на
ПП. Следует так же отметить, что наличие микрозеркала вносит дополнительные
трудности не только с позиционированием зеркала относительно световодов, но
значительно снижает технологичность конечного изделия [83].
1.5. Световоды на основе оптических пленок
Технология Polyguide описывает создание оптоэлектрических плат на основе, так называемой “оптической пленки”. Ламинирование оптическими пленками на подложки обеспечивает высокую стабильность размеров и низкие потери сопряжения с оптико-электронными устройствами, такими как полупроводниковые лазеры, детекторы, оптоэлектрические переключатели или оптическое волокно.
Световодную пленку получают путем смешивания метакрилата с полимерными связующими. Далее полученную пленку наносят на плёнку Mylar на
основе синтетического полиэфирного волокна. Это необходимо для безопасного
хранения данной пленки.
Световоды формируются с использованием фирменной методики основанной на внутренней диффузии мономеров. Данные процессы основаны на свойствах полимерного материала, при которых высокая мобильность низкомолекулярных мономеров позволяет им диффундировать внутри полимерной матрицы
связующего.
Данный процесс формирования световодов протекает полностью под действием света без использования травления или механической обработки поверхности, при температурах от 15 до 45°C. Получаемые в итоге гладкие и ровные
41
стенки световода положительно сказываются на параметрах оптических потерь,
которые по существу идентичны оптическому волокну. Для создания одномодового световода используется диффузия через вскрытия в маске.
1.6.
Оптоэлектронные
световоды
на
кристалле
и
оптические
элементы ИС
Можно предположить, что необходимость в пассивных элементах оптических ИС отсутствует, поскольку компоненты оптоволокна могут выполнять многие функции с беспрецедентно низким уровнем потерь. Однако интеграция оптических световодов предлагает ряд уникальных и новых возможностей. Компактность становится важным фактором, если говорить не о масштабах лаборатории, а о конкретной сфере применения, когда все функции должны быть реализованы в небольшом корпусе, который затем помещается на плате, например,
блок из 16 разветвителей на одном чипе вместо совмещения отдельных оптоволокон с 2 разветвителями на каждом.
Снижение затрат достигается путем объединения сложных функций, что
сократит число ручных операций разводки, а также при изготовлении большого
числа чипов на единой пластине.
Сложность технологического процесса возрастает, поскольку применение
фотолитографии позволяет разрабатывать компоненты с многочисленными оптическими межсоединениями, например, одномодовые звездообразные разветвители. Высокая точность процесса фотолитографии позволяет создавать с высокой точностью отдельные элементы оптических ИС, что позволяет создавать
новые конфигурации устройств, таких как маршрутизатор на световодной решетке и оптические фильтры Фурье. Пассивные элементы часто используются в
соединении с лазерами и приемниками излучения. В таком случае, будет очень
удобно, если оптическая ИС сможет служить платформой, к которой могут быть
подсоединены другие элементы схемы.
42
При таком многообразии альтернативных вариантов, почему же в производстве пассивных оптических ИС предпочтение отдается оксиду кремния на
кремнии. Производство оптических ИС требует использования плоских, крайне
гладких подложек большой площади с низкой себестоимостью. Таким образом,
кремниевые подложки являются коммерчески самым выгодным решением поставленной задачи. В рамках программы SiOB, реализуемой корпорацией Bell
Laboratories, в настоящее время используются пластины диаметром в пять дюймов, кроме того, доступны и пластины большего диаметра. Стоимость единицы
площади кремниевой подложки на два порядка ниже, чем у подложки из фосфида
индия.
Оксид кремния (Si02) очень широко используется в промышленном производстве кремниевых ИС, а также при изготовлении оптоволокна. Для него характерен стабильный и хорошо контролируемый показатель коэффициента преломления и высокая степень прозрачности. Так, все этапы производства SiOB световодов легко реализуются благодаря доступности оборудования, применяемого в
данной отрасли. Во многих случаях химический процесс производства схож с
кремниевой технологией, что позволяет задействовать оборудование, традиционно используемое для производства обычных кремниевых ИС. Учитывая высокую стоимость производственного оборудования, данный факт представляет собой значительное преимущество.
Оптоволокно также изготовляется из оксида кремния таким образом, что
масло, сближающее коэффициенты преломления, или эластомер между световодами или оптоволокнами приводит к созданию неотражающей поверхности. Характеристики оптоволокна широко свидетельствуют о том, что оксид кремния
по своей природе является оптическим материалом с низким уровнем потерь.
В противоположность оксиду кремния полимеры могут отличаться узким
вибронным спектром поглощения в оптическом диапазоне связи. Световод и
оптоволокно также согласуются в рамках коэффициента теплового расширения
и при необходимости могут быть объединены. Коэффициент теплового расширения кремния выше показателя для легированного оксида кремния, в связи с чем
43
пленка из оксида кремния/кремния деформируется при сжатии после снятия
напряжений. При сжатии пленка менее подвержена образованию трещин. Подобная устойчивость к трещинам не отмечается у пленок из криогенного (низкотемпературного) стекла на кремниевых подложках и большинства пленок из легированного оксида кремния на подложках из кварца.
Кремний обладает хорошей тепловой проводимостью и может использоваться как лазер/квантовый усилитель. Благодаря теплоотводным качествам
кремниевой подложки возможно производство гибридных лазерных световодов
и стабильных/устойчивых термооптических переключателей. Кремний имеет
тормозящую травление поверхность, которая дает возможность химического
травления V-образных каналов высокой точности, применяемых при наложении
матриц оптоволокон на оптическую ИС. V-образные каналы могут изготовляться
на подложке оптического световода. И хотя этот подход требует более сложной
технологии производства, он дает возможность более точного совмещения и более надежного крепления оптоволокон к чипам, чем если бы они крепились бы к
отдельному элементу.
1.7. Оптические световоды на основе оптического геля
Первыми световодами на основе оптического геля стали световоды на основе агарозы. Агароза — это особо чистая фракция природного, линейного полисахарида, агара, выделяемого из морских водорослей.
Гидрогель на основе агарозы имеет отличную когезию, вследствие чего
есть возможность формирования микромасштабных световодов. В работе Аадара Джейна, Эллена Янга и Девида Эриксона из школы механической и аэрокосмической инженерии Сибли были исследованы возможности формирования
световодов на основе агарозы и предложена технология создания таких световодов.
44
Специальным образом был подготовлен оптический гель: в дистиллированную воду при температуре 80 градусов был добавлен порошок агарозы, из
расчета 1.5 % от объема воды. Затем гель выдерживают для того чтобы из него
вышли все пузыри воздуха. Дождавшись однородности геля, его остужают. На
кремниевой пластине с помощью фотолитографии вытравили продольные канавки, тем самым получив штамп для изготовления световодов. На подложку
наносится небольшое количество геля на основе агарозы, прижимается штампом, далее подложку с прижатым штампом остужают не менее 20 минут. Затем
штамп аккуратно убрали.
Для проверки получившихся световодов использовался лазер с длиной
волны 633 нм. К световодам, полученным из агарозы, присоединили многомодовые оптические волокна. Световоды на основе агарозы пропустили через себя
свет. Прохождение света показано на рисунке 1.21.
Рисунок 1.21. Прохождение света в световоде
(Источник: Университет Тафтса)
45
Важным фактором являются потери рассеяния и поглощения при прохождении света в световоде. На основе полученного изображения удалось количественно посчитать эти потери. Вдоль длины световода была измерена интенсивность рассеянного света. Интенсивность рассеянного излучения пропорциональна интенсивности света, распространяющегося в световоде, опираясь на это,
был составлен график зависимости интенсивности света от длины световода.
Измерения интенсивности света проводились на разных световодах разных чипов, содержащих световоды, что позволило сделать выводы о воспроизводимости процесса. Средние потери в световодах на основе агарозы составили
13дБ/см. Для сравнения в световодах на основе альгинальных гидрогелях потери
составляют 5-10 дБ/см, и 2-7 дБ/см в синтетических гидрогелях, при диаметре
световода 1,1мм.
В ряде случаев печать производится водным раствором вещества, так
называемыми фиброиновыми чернилами при нормальных условиях окружающей среды. Напечатанные световоды сохраняют свою стержневую морфологию
путем кристаллизации в среде вокруг материала на выходе из экструдера, богатой метанолом. Эксперименты показывают, что напечатанные волокна сохраняют способность по передаче лазерного излучения с длинной волны 633нм, как
при линейной форме световода, так и при печати световода в виде волнистой
линии.
Исследования полученных структур показали, что оптические потери в
данных световодах сопоставимы с потерями в световодах сформированных на
поверхности интегральных структур. Это говорит о том, что данная технология
формирования световодов может найти широкое применение в различных оптических и оптико-электронных устройствах. В печатные волноводы был добавлен
материал Родамин 6G, в качестве усиливающего компонента, что позволяет
утверждать о перспективности подхода по «легированию» фибориновых «чернил».
46
Возможность печати оптических волноводов открывает широкие возможности по созданию биофотонных приборов, которые могут быть разлагаемыми с
учетом требований по биосовместимости.
На рисунке 1.22. показана печать линейных и криволинейных световодов
на подложку. Для печати используется трех координатный привод, подобный
тем, что используются в 3D печати. Экструзия «чернил» происходит из 5 нано
метрового стеклянного сопла в богатой этанолом среде. Этаноловая среда приводит к структурному переходу фиброиновых «чернил» и способствует их затвердеванию. Экструзия фиброиновых «чернил» происходит на подложку из боросиликатного стекла с индексом преломления n равному 1.52, что несколько
ниже, чем у материала сформированных световодов, который равен 1.54 (при
длине волны 633 нм). Отражения внутри световода происходят как на переходе
световод / подложка, так и на переходе световод/воздух.
a)
b)
Рисунок 1.22. a) Схематическое представление печати световодов, в
которой концентрированные фиброиновые «чернила» выдавливаются через
экструдер в этаноловой среде. b) Схема установки, используемой для анализа
поперечного сечения световодов, где: 1 – экструдер для подачи материала и обработки этанолом; 2 – напечатанный световод; 3 – стеклянная подложка;
4 – система оптического контроля для регулировки оптимальных параметров
печати (заимствовано из [84])
47
Для правильной реализации световода, поперечные размеры должны быть
как можно более равномерными. Стенки волновода должны оставаться гладкими
и без дефектов, что бы свести к минимуму рассеивание на поверхности и потерю
светового потока. На рисунках 1.23a. и 1.23b. представлен вид сверху на прямолинейные и криволинейные световоды. На рисунке 1.23c. показано сечение световода, видно, что размер в поперечнике составляет примерно 5 на 5 нм, что соответствует размеру сопла.
Рисунок 1.23. a) напечатанный световод; b) увеличенное изображение
участка изгиба световода; c) поперечное сечение печатного световода после
разрезки для подключения к нему источника света
(Источник: Технологический университет Тафтса)
Высокая концентрация (28-30% от массы) фиброиновых «чернил» позволяет свести к минимуму усадку в процессе сушки световода на подложке. На
этом же рисунке видно отклонение формы поперечника световода от идеально
48
круглой формы, так как «чернила» смачивают подложку в процессе печати и до
того, как произошла кристаллизация.
Описанная выше технология формирования световодов свидетельствует о
хороших результатах по распространению излучения, что показано на
рисунке 1.24.
Рисунок 1.24. a) прямолинейный участок световода; b) искривлённые
световоды; c) поперечное сечение подсвеченного гелий-неоновым(He:Ne)
лазером печатного световода (Источник: Технологический университет Тафтса)
Однако существуют и определенные проблемы, связанные в первую очередь с невозможностью сформировать торцы световодов, пригодные для приема
49
и передачи светового потока. В настоящее время для формирования торцов световода применяется фрезерование алмазной фрезой самого световода, что приводит к образованию в нем трещин и как следствие росту оптических потерь в
канале.
Кроме того, данный недостаток приводит к невозможности связи источника и приемника излучения путем простого соединения их между собой сформированным экструдером световодом.
1.8. Постановка цели и задач диссертационной работы по результатам
обзора
В данной главе рассмотрены возможности использования световодных каналов для передачи информации, интегрируемых в печатную плату.
Рассмотрены получившие наибольшее распространение методы формирования оптических световодов, включая такие методы как лазерное спекание, лазерную печать, струйную печать опто-гелем и формирование контактной фотолитографией.
Рассмотрены основные свойства планарных световодов и типы активных
и пассивных оптических элементов, которые можно реализовать при помощи оптических световодов.
По результатам анализа существующих технологий выбрана технология
внутреннего монтажа оптического волокна, которая позволит создать эффективную систему переноса информации светового поля к фотоприемнику, упростив
тем самым создание оптико-электронной измерительной системы.
50
1.8. Выводы
1. Рассмотрены различные виды световодов, показаны их особенности, а
также приведены варианты различного их исполнения.
2. Рассмотрены основные оптические эффекты, приводящие к распространению света в световоде.
3. Рассмотрены существующие на данный момент разработки по технологиям формирования планарных световодов на печатных платах и внутреннего
монтажа оптического волокна. Выявлены достоинства и недостатки представленных технологий.
51
ГЛАВА 2. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА НА ОСНОВЕ ОПТИЧЕСКИХ СВЕТОВОДОВ
2.1.
Обоснование оптической схемы измерений
Оптические системы для измерения координат точки касания пальца оператора, с экраном монитора известны давно. В основном, работа этих систем основана на создании множества параллельно расположенных световых пучков,
распространяемых вдоль вертикальной и горизонтальной сторон монитора, и оптически сопряженных с соответствующими приемниками излучения, и предложены в патентах США. [85,86,87,88]
Упрощенная геометрическая схема, реализованная в этих системах, приведена на рисунке 2.1.
1
1
3
2
2
Рисунок 2.1. Геометрическая схема измерения в ИК оптической сенсорной панели, где: 1 – приемные световоды; 2 – излучающие световоды;
3 – рабочее поле оптической системы
52
Однако этот способ не является единственным. Так в патенте США №
7006236 B2 от 28.02.2006 г. [89], предлагается устройство, создающее виртуальную сенсорную поверхность, касание которой в определенных местах эквивалентно нажатию кнопок. Данное устройство содержит телевизионную камеру,
оптически сопряженный с ней источник структурированного освещения и вычислительное устройство. Введение объекта контроля в создаваемый источником структурированного освещения поток, регистрируется телевизионной камерой. Вычислительное устройство обрабатывает видеоинформацию, поступающую с телевизионной камеры, и определяет координаты точки касания с потоком
структурированного излучения.
В устройствах, предложенных в патентах США № 6480187 от 12.11.2002 г.
[90], № 6492633 от 10.12.2002 г. [91], № 6844539 от 18.01.2005 г. [92], № 7522156
от 21.04.2009 г. [93], используются отражатель и два приемо-передающих оптических модуля. При появлении на пути потоков, формируемых излучателями,
входящими в состав приемо-передающих модулей объекта контроля, специализированный вычислитель, с помощью фотоприемников, входящих в состав приемо-передающих модулей регистрирует его угловые координаты. Рассматривая
предложенные в них функциональные схемы, можно отметить низкую технологичность их реализации, связанную с необходимостью юстировки оптических
элементов, входящих в их состав. Весьма существенным является также необходимость расположения оптических осей фотоприемников таким образом, чтобы
они располагались в плоскости, параллельной сенсорной (экрану).
В патенте РФ № 2542947 C2 от 07.11.2014 г. [94], автором была предложена
система, обладающая существенными преимуществами перед описанными
выше, в плане разрешающей способности, быстродействия и конструктивного
исполнения. Ее функциональная схема приведена на рисунке 2.2.
53
Рисунок 2.2. Функциональная схема оптического сенсорного устройства,
где: 1 – специализированный вычислитель; 2 и 3 – излучатели, 4 – отражатель;
5 – сенсорная поверхность; 6 – цилиндрическая линза; 7 – объектив;
8 – линейчатый фотоприемник, 78 и 79 – оптические потоки
Специализированный вычислитель 1 поочередно включает один из двух
излучателей 2 или 3, формирующих потоки излучения 78 и 79 направленные в
сторону отражателя. При появлении на пути распространения потоков 78 и :9 пальца (стилуса) оператора, касающегося сенсорной поверхности, происходит
затенение поверхности отражателя. В плоскости нахождения линейчатого фотоприемника с помощью цилиндрической линзы и объектива строится изображение отражателя, на котором попеременно появляются две тени, соответствующие включенному состоянию одного из двух излучателей.
Существенного повышения разрешающей способности и быстродействия
удалось добиться применением в этой системе линейчатого приемника излуче-
54
ния на основе ПЗС, обладающего большей разрешающей способностью и скоростью обновления информации по сравнению с матричными приемниками излучения.
Для этого, используется оптическое преобразование изображения тени T
на поверхности отражателя в линейчатый фрагмент, пересекающий фоточувствительную поверхность ПЗС-линейки -
τ, как изображено на рисунке 2.3.
Рисунок 2.3. Преобразование изображения тени, где: 1 – линейчатый
фотоприемник; 2 – цилиндрическая линза; 3 – объектив; 4 – отражатель;
5 – излучатель; ; – плоскость сагиттальной фокусировки; τ – изображение тени
на плоскости ;; 78 – оптический поток, формируемый излучателем 5;
T – изображение тени на поверхности отражателя; П – объект контроля;
О – оптический центр ансамбля из цилиндрической линзы 2 и объектива 3
55
Данное преобразование достигается использованием при построении изображения, оптического ансамбля из двух линз – фокусирующей 3 и цилиндрической 2. Этот ансамбль обладает двумя плоскостями фокусировки, так называемыми сагиттальной ; и меридиональной <, изображенными на рисунке 2.4.
Рисунок 2.4. Формирование 2-х плоскостей фокусировки, где:
1 – линейчатый фотоприемник; 2 – цилиндрическая линза; 3 – объектив;
= – осевая линия отражателя; ε1, ε2 – точки, принадлежащие линии =;
>8? , >9? – меридиональные точки сходимости; >8@ , >9@ – сагиттальные точки
сходимости; < – плоскость меридиональной фокусировки; ; – плоскость
сагиттальной фокусировки; γ – изображение линии ρ в плоскости ;;
δ – изображение линии ρ в плоскости <
На данной оптико-геометрической схеме видно, что оптические центры из-
лучателей 1 и 2 и линия ρ, проходящая по середине отражателя 4, находятся в
одной плоскости. При этом цилиндрическая линза, объектив и линейчатый фо-
топриемник отстоят консольно над сенсорной поверхностью. Благодаря расфо-
кусировке изображения отражателя в плоскости ;, изображения теней в плоско56
сти ; пересекают фоточувствительную поверхность линейчатого фотоприем-
ника 8, и не дает этим изображениям выйти за пределы линии расположения фотоприемных пикселей.
Это в свою очередь исключает необходимость точной юстировки линейчатого фотоприемника относительно отражателя и делает несущественным фактор
перспективных искажений.
Идея использования теневых составляющих от действия пространственно-
разнесенных излучателей, была применена автором в устройстве для организации интерфейса с объектом виртуальной реальности, на которую был получен
патент РФ № 2486608 от 27.06.2013г [95].
В ходе дальнейшего анализа, автором была синтезирована еще одна измерительная система, позволяющая измерение помимо координат точки касания
сенсорной поверхности и скорость этого соприкосновения. Данная система была
защищена патентом РФ № 2542949 C2 от 23.05.2013 г. [96]. Ее функциональная
схема представлена на рисунке 2.5.
Данное устройство функционирует следующим образом. Фотоприемник
регистрирует потоки, отраженные от отражающих сегментов в сторону входной
оптики с телесным углом Ф. При перемещении пальца оператора к точке касания
Cп , Eп на сенсорной поверхности, он обязательно пересекает потоки излуче-
ния78 , 79 , 7F и 7G , последовательно формируемые с помощью специали-
зированного вычислителя 11.
Как и в вышеописанной системе, используется ансамбль «цилиндрическая
линза-объектив», который обладает ярко выраженным астигматизмом, при кото-
ром элементарные пучки лучей, исходящие из точек ε1 и
ε2, имеют в простран-
стве изображения в меридиональном и сагиттальном сечениях, различные точки
сходимости -J8K , J9K и J8L , J9L соответственно [97].
57
Рисунок 2.5. Функциональная схема сенсорного устройства с измерением
динамического воздействия, где: 1, 2, 3, 4 – первый, второй, третий и
четвертый излучатели; 5 – верхний (первый) отражающий сегмент; 6 – нижний
(второй) отражающий сегмент; 7 – сенсорная поверхность; 8 – цилиндрическая
линза; 9 – объектив; 10 – линейчатый фотоприемник; 11 – специализированный
вычислитель;78 , 79 , 7F и 7G – оптические потоки, формируемые
излучателями 1, 2, 3, 4; M – телесный угол обзора ансамбля из цилиндрической
линзы 8 и объектива 9
Конструктивно, первый и второй излучатели и линия ρ, проходящая по середине верхнего отражающего сегмента находятся в плоскости, параллельной
сенсорной поверхности. Так же третий и четвертый излучатели и линия ς, проходящая по середине нижнего сегмента находятся в плоскости, параллельной
сенсорной поверхности. Цилиндрическая линза, объектив и линейчатый фотоприемник отстоят консольно над сенсорной поверхностью. Благодаря расфоку-
сировки изображений сегментов и в плоскости ;, изображения теней в плоскости
; пересекают фоточувствительную поверхность линейчатого фотоприемника, и
58
не дает этим изображениям выйти за пределы расположения фотоприемных пикселей. Это в свою очередь исключает необходимость точной юстировки линейчатого фотоприемника относительно отражающих сегментов и делает несущественным фактор перспективных искажений. Консольное расположение сборки
«линейчатый фотоприемник-объектив-цилиндрическая линза» упрощает конструктивное исполнение данной системы, в связи с тем, что не требует их размещения в одной плоскости с излучателями.
Общим, для описанных выше обеих систем, является использование линейчатого приемника, обладающего по сравнению с матричным повышенной
скоростью обновления информации при гораздо более высоком линейном разрешении. Так в отличие от типовой скорости кадровой развертки матричного приемника изображения в пределах 50-60 Гц, линейчатый фотоприемник, например,
типа Atmel TH7834C [98], с разрешением 12000 пикселей, имеющий 4 выходных
видеоканала и скорость считывания 5 МГц / пиксель на канал, дает эквивалентную скорость обновления информации 1700 Гц, при существенно большей точности. В случае более низкого разрешения, например, при использовании линейчатого фотоприемника S9227 фирмы Hamamatsu [99], разрешением 512 пикселей
и частотой считывания 5 МГц, можно получить скорость обновления 10 КГц, т.е.
выше, чем у матрицы с эквивалентным разрешением в 200 раз.
Очевидно, что столь высокая скорость обновления видеоинформации позволяет получить высокий темп измерений, при наличии естественно достаточно
быстродействующего специализированного вычислителя 10. Фиксируя время
прохождения объектом контроля заданного пространственного промежутка,
можно определить скорость его соприкосновения с сенсорной поверхностью и,
следовательно, меру его воздействия (силу удара) о сенсорную поверхность. А
именно, измерив интервал времени τ, между появлением тени от этого объекта
на поверхности фотоприемника при включенном состоянии первого (или вто-
59
рого) излучателя, например в момент времени N∗н , и появлением тени на поверхности фотоприемника при включенном третьим (или четвертым) излучателем,
например в момент времени N∗к , можно определить его скорость.
Общим принципом, используемым как в описанной в начале раздела опти-
ческой сенсорной панели, так и в измерительных системах, предложенных автором, является наличие множества пространственно-разнесенных излучателей,
оптически связанных с соответствующими приемниками излучения, а также использование теневых составляющих, отбрасываемых контролируемым объектом, подсвечиваемым этими излучателями.
На рисунке. 2.6. изображена оптическая схема, иллюстрирующая сказан-
ное. А именно, имеется набор из R, пространственно-разнесенных излучателей
STU{8…R} , с заданным положением каждого в системе координат YZ[\. Их по-
токи излучения - 7TU{8…R} , падают на входные апертуры световодов]^U{8…?} .
На поверхности _TR C, E, `
в которой расположены входные апертуры
]^U{8…?} , при последовательном включении излучателей STU{8…R} образуются
теневые составляющие aTU{8…R} ,связанные с пространственным положением
объекта b C, E, ` , относительно потоков 7TU{8…R} .
На поверхности _cdN C, E, ` , в которой расположены выходные апер-
туры световодов - e^ , формируется изображение S C, E . Оптическая связь
_cdN C, E, ` с фотоприемной матрицей f, позволяет далее осуществлять об-
работку сигнала S C, E в специализированном вычислителе g. Заложенный в
него алгоритм, на основании пространственного положения STU{8…R} , и коорди-
нат центров aTU{8…R} ,позволяет получить информацию о пространственном по-
ложении точки b C, E, ` .
60
Рисунок 2.6. Обобщенная оптическая схема преобразования информации,
где: M – фотоприемная матрица; C – специализированный вычислитель;
]T – входные апертуры световодов; eT – выходные апертуры световодов;
STU
8…R
– набор пространственно разнесенных излучателей;
78 …7R – оптические потоки излучателей S8 …SR ; K x, y, z – координаты
точки, принадлежащей объекту контроля
Известно использование световодов для построения подобного рода
устройств. На рисунке 2.8 приведена оптическая схема, которая фактически повторяет схему, представленную выше, создающую параллельные световые
пучки, оптически сопряженные с соответствующими фотоприемниками, заимствованная из патента США № 7809221B2 от 05.10.2010 г [100]. Кроме того, известен ряд устройств на основе волоконно-оптических фоконов (рисунок 2.7.),
применяемых во многих электронно-оптических системах и медицинской
технике.
61
Рисунок 2.8. Функциональная схема сенсорной панели на основе
световодов (Патент США № 7809221B2)
Рисунок 2.7. Волоконно-оптические фоконы
(Источник: ОАО Завод “Оптик”)
62
Еще одно техническое решение, использующее набор оптоволокон для передачи излучения к фотоприёмному массиву [101], представлено на рисунке 2.9.
Рисунок 2.9. Сенсорная панель на основе световодов (Источник: Патент
США № 7957615B2)
Одной из целей диссертационной работы, является разработка оптическоволоконной измерительной системы для определения координат точки касания,
обладающей:
1.
малыми габаритами, позволяющими расширить ее применение,
2.
высокой технологичностью при ее изготовлении,
3.
повышенной точностью и быстродействием,
4.
возможностью построения на ее основе управляющих интерфейсов
автоматизированных систем.
Для обеспечения этих требований, предлагается оптическая схема, представленная на рисунке 2.10.
Предлагаемый «световодный сенсор», в основе работы которого лежит
данная оптическая схема, защищен патентом РФ № 2541849 C2 от 28.01.2014
[102]. Его функциональная схема приведена на рисунке 2.11.
63
Рисунок 2.10. Оптическая схема измерений, где:I xo , yo , zo ,
I xo , yo , zo
– координаты расположения первого и второго излучателей;
78 , 79 – оптические потоки первого и второго излучателей;
p xq , yq , zq –точка пересечения отрезковrI1 sxi1 , yi1 , zi1 t, δ1 sxδ1 , yδ1 , zδ1 tv и
{I xo , yo , zo , δ xw , yw , zw }; M − опорная плоскость; a8 , a9 – теневые сегменты
В этой схеме, используется попеременное формирование 2-х оптических
потоков 78 и 79 , разнесенными в пространстве источниками излучения
x
y
,
y
,
иx
y
y
,
y
,
y
. Соответственно при этом на опорной плоско-
сти zобразуются два теневых сегмента a8 и a9 с геометрическими центрами
{
|
,
|
,
|
и {
|
,
|
,
|
. При этом, пересечение оптических пото-
ков 78 и 79 , на плоскости M, определяет сенсорное поле }, т.е.:
} ≡ 78 ∩ 79 ∩ M.
64
(1)
В сенсорном поле }, пространственное положение точки p
определяется как точка пересечения отрезков
{x
y
,
y
,
y
,{
|
,
|
,
|
} и {x
y
,
y
,
y
,{
|
,
€, €, €
|
,
|
,
} .
Рисунок 2.11. Световодный сенсор, где: 1, 2 – источники инфракрасной
подсветки; 3 – контролируемый объект; 4 – полимерная основа; 5 – световоды;
6 – теневые сегменты; 7 – фотоприемный массив (матрица);
78 , 79 – оптические потоки, формируемые излучателями 1, 2
Устройство включает в себя полимерную основу содержащую набор световодов, выполненных в виде полостей в полимерном материале. Входные
торцы полостей, оптически связаны с излучателями. Данные световоды оптически сопряжены с входящими в состав устройства источниками подсветки, а выходные торцы этого набора световодов оптически связаны с фотоприемной матрицей 7.
65
Световые потоки от каждого из излучателей 1 и 2, падают на входные
торцы приемных световодов 5, а пересечение потоков 78 , 79 на входных торцах образует рабочую область сенсорной панели.
Специализированный вычислитель 8 осуществляет поочередное включение излучателей 1 и 2, и вводит в память состояния фотоприемного массива для
каждого из состояний излучателей 1 и 2.
На рисунке 2.12. приведен рисунок, поясняющий формирование на полимерной основе световодов, с торцевым отражателем, для оптической связи с фотоприемной матрицей.
Рисунок 2.12. Оптическая схема транзита теневого сегмента, где:
1 – засвеченная поверхность, 2 – теневой сегмент, 3 – световод, 4 – полимерная
основа, 5 – выходной торцевой отражатель, φ - отраженный оптический поток
66
Для повышения разрешающей способности, необходимо увеличивать
плотность размещения световодов. Это может быть достигнуто увеличением количества полимерных слоев 2, с размещенными в них канальными световодами,
как изображено на рисунке 2.13.
Рисунок 2.13. Схема формирования световодов в двух слоях полимерных
основ, где: 1 – источник подсветки, с телесным углом распространения
излучения Ψ1; 2 – нижний слой; 3 – верхний слой; 4 – световоды; 5 – выходной
торцовый отражатель; 6 – вскрытия в верхнем слое; φ – отраженный световой
поток, направленный в сторону фотоприемника; ω – отраженный поток
излучения, прошедший через вскрытие 6
Разрешающая способность может быть увеличена при расширении горизонтальной протяженности входных апертур. Это связано с тем, что при частичном перекрытии теневым сегментом входной апертуры, величина этого перекрытия может быть определена, исходя из допущения, что освещенность соседних
апертур имеют близкие значения. На рисунке 2.14 приведена оптическая модель
образования частичного затенения, исходя из которой, может быть определено
численное значение этого перекрытия.
67
Рисунок. 2.14. Оптическая модель образования частичного затенения
входного торца световода, где: 1 – излучатель; 2- контролируемый объект,
перекрывающий оптический поток; 3 – плата основание; 4 – световоды;
5 – отражатель; 6 –тень, формируемая при освещении контролируемого
объекта излучателем 1; •‚
T – площадь освещенного торца -го световода;
‚
•e
T - площадь затененного торца T-го световода; •Tƒ8 – площадь освещенного
торца T + 1– го световода; „ – ширина торца; …y – линейная координата края
T –го торца
Если считать, что граница тени проходит на расстоянии ∆…y от левого края
торца, а его ширина равна <, и что сигнал, снимаемый с фотодиодного массива
и соответствующий частично засвеченному i - му торцу световода равен † y , и
пропорционален засвеченной площади ST‚ , то можно записать:
† y = ˆ < − ∆…y .
(2)
Аналогично для полностью засвеченного торца, ближнего к i –му, можно
записать:
68
† yƒ = ˆ<.
(3)
Из 1 и 2 можно получить:
∆…y =
‰sŠ ‹Œ* Š ‹ t
Š ‹Œ*
(4)
Таким образом, уточненная X - координата правой границы тени, равна
…y + ∆…y .
(5)
Специализированный вычислитель по координатам центров теней, сфор-
мированным от действия первого и второго излучателя – (… , • ) и (… , • ) и
координатам этих излучателей - (… Ž• ,• Ž• ) и (… Ž• ,• Ž• ), определяет координаты контролируемого объекта.
Входящее в состав устройства вычислительное устройство по номерам i и
j, выбирает из записанных в его память констант, соответствующие этим номерам координаты торцов световодов (относительно некоторой системы координат
0XY)- (…y , •y ), (… , • ).
Принимая во внимание, что координаты точечных источников излучения
1 и 2 в системе 0XY - (… • , • • ) и (… • , • • ), уравнения прямых, проходящих через
точки (…y , •y ), (… • , • • ) и (… , • ), (… • , • • ) можно представить в виде системы
‘
’“’‹
–“–‹
U •
;
’•
* “’‹ –* “–‹
’“’”
–“–”
U •
.
’•
+ “’” –+ “–”
(6)
Координаты центра сечения объекта, затенившего соответствующие торцы
световодов, определяются как точка пересечения этих прямых, т.е. как решение
системы уравнений 6, относительно …, •.
69
2.2. Технологическое обоснование конструкции
Как изображено на рисунке 2.16. входные апертуры световодов при этом
находятся на стороне, обращенной в сторону ИК-излучателей, а сформированные в окончаниях световодов отражатели, направляют достигшее их излучение
φ в сторону фотодиодного массива. Для уменьшения оптических потерь, боковые поверхности световодов могут иметь зеркальное покрытие, например, из
осажденного алюминия [103].
Рисунок 2.16. Регулярная структура выходных отражателей
Для сведения световодов с торца платы к фотодиодному массиву, предлагается использовать планарные световоды криволинейной формы. На рисунке
2.17. показана геометрическая схема отдельного фрагмента световода.
70
Рисунок 2.17. Геометрическая схема размещения криволинейного
световода, где: 1 – основание; 2 – световод; 3 – отражающая плоскость
Основа представляет собой пластину, например, полиметилметакрилата,
которая для большей прочности может быть нанесена на стеклянную поверхность либо на поверхность печатной платы без защитной маски.
Световоды могут быть сформированы как контактной фотолитографией
[104], так и при помощи импринт литографии.
В первом случает процесс формирования световодов проходит со следующими этапами, изображенными на рисунке 2.18.
a)
b)
Рисунок 2.18.
71
c)
d)
Рисунок 2.18(продолжение). Диаграмма этапов изготовления, где:
a) – Подготовка и отчистка поверхности платы для нанесения фоторезиста,
b) – Нанесение и отверждение под УФ фоторезиста, c) – Формирование через
маску вскрытий в фоторезисте, d) – Заполнение вскрытий оптогелем
В случае использования импринт литографии световоды формируются при
помощи специального штампа.
Штамп под высоким давлением и при высокой температуре вдавливают в
слой полиметилметакрилата, который в данный момент процесса находится в
жидком состоянии. При остывании полимер фиксирует необходимую форму, после чего штамп удаляют [105]. Этапы формирования изображены на рисунке
2.19.
a)
Рисунок 2.19.
72
b)
c)
d)
e)
f)
Рисунок 2.19(продолжение). Диаграмма этапов изготовления, где:
a) – Подготовка и отчистка поверхности платы для нанесения фоторезиста,
b) – Нанесения на поверхность платы ПММА, c) – Вдавливание штампа в
поверхность, d) – Прогрев платы с целью отверждения ПММА, e) – Удаление
штампа, f) – Заполнение образовавшихся канавок оптогелем
73
Полимерные слои с сформированными в них световодами могут быть уложены друг на друга таким образом, чтобы входные торцы световодов располагались в шахматном порядке, что позволит повысить разрешающую способность
устройства. Смоделированный вариант данного конструктивного исполнения
изображен на рисунке 2.20.
Рисунок 2.20. Трехмерная визуализация многослойной структуры
При этом верхнее основание должно иметь вскрытия, позволяющие оптическим потокам ω, направляемым отражателями вверх, получить оптическую
связь с фотодиодным массивом. Этот вариант конструктивного исполнения
изображен на рисунке 2.21.
a)
Рисунок 2.21. Диаграмма этапов изготовления
74
b)
c)
d)
e)
Рисунок 2.21. Диаграмма этапов изготовления
75
f)
g)
h)
Рисунок 2.21(продолжение). Диаграмма этапов изготовления, где:
a) – нанесение слоя препрега, b) – нанесение второго слоя ПММА,
c) – Вдавливание штампа в поверхность ПММА, d) – Прогрев платы с целью
отверждения ПММА, e) – Удаление штампа, f) – Заполнение образовавшихся
канавок оптогелем, g) – формирование вскрытий в верхнем слое методом
контактной фотолитографии, h) – удаление маски
При этом верхнее основание должно иметь вскрытия, позволяющие оптическим потокам ω, направляемым отражателями вверх, получить оптическую
76
связь с фотодиодным массивом. При этом сформированные вскрытия можно использовать как точки совмещения при прессовании слоев.
При этом процесс формирования вскрытий рекомендуется проводить после прессования стека слоев, как это происходить в процессе производства МПП.
Процесс прессования представляет собой склеивание слоев ПММА за счет расплавления и отверждения смолы прокладочных листов, находящихся в полуотвержденном состоянии. Прокладочные при этом должны иметь такую же структуру, что и основания слоев:
- ту же основу связующего слоя,
- тот же армирующий материал.
Чтобы обеспечить высокую прочность сцепления слоев необходимо повысить шероховатость, при этом наружный слой поверхности световодов должен
быть достаточно прочным и гладким.
2.3. Выводы по главе
1.
Разработана оптическая схема определения пространственного поло-
жения объекта контроля с использованием линейчатого фотоприемника, объектива содержащего цилиндрическую линзу и двух пространственно разнесенных
излучателей.
2.
Разработана оптическая схема определения пространственного по-
ложения и скорости касания с опорной плоскостью объекта контроля с использованием линейчатого фотоприемника, объектива содержащего цилиндрическую линзу и четырех пространственно разнесенных излучателей.
3.
Разработаны функциональные схемы устройств определения про-
странственного положения объекта контроля, использующие описанные выше
оптические схемы.
4.
Новизна описанных выше технических решений, защищена двумя
патентами РФ на изобретения.
77
5.
На основе обобщенной оптической схемы измерения пространствен-
ного положения, разработано устройство измерения пространственного положения на основе планарных световодов, интегрированных в полимерную основу.
6.
Получен патент РФ на данное устройство.
7.
Проведен анализ получения теневых составляющих на торцах вход-
ных апертур световодов, и на его основе, получена система уравнений для определения пространственного положения объекта контроля и показана возможность повышения точностных характеристик при расширении входных апертур
планарных световодов.
8.
Разработан метод формирования планарных световодов на печатной
плате, предложены алгоритмы технологических процессов формирования световодов методами контактной фотолитографии и наноимпринт литографии.
9.
Разработано многослойное исполнение предложенного устройства.
Предложен алгоритм технологического процесса формирования многослойной
структуры.
78
ГЛАВА
3.
ТЕОРЕТИЧЕСКОЕ
ИССЛЕДОВАНИЕ
ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ
В данной главе предложена структурная схема преобразования изображения сцены в первичные отсчеты для построения человеко-машинного интерфейса, получены энергетические характеристики, определены требования по
взаимному расположению излучателей и входных апертур оптоволокон.
3.1. Структурная схема преобразования информации
Основой для построения структурной схемы преобразования изображения
сцены в первичные отсчеты в оптоволоконной измерительной системе, является
предложенная в [106] обобщенная схема оптико-локационной системы, приведенная на рис. 3.1.
Рис.3.1. Обобщенная схема оптико-локационной системы, где:
1 - источник излучения, 2 - оптическая передающая система, 3 - среда,
4 - объект, 5 - блок управления оптическими осями, 6 – приемная оптическая
система, 7 – блок опорной информации, 8 – фотоприемник, 9 – блок обработки
информации, 10 – потребитель информации
79
Для функционирования оптоволоконной измерительной системы, не требуется наличия всех вышеперечисленных блоков обобщенной схемы. А именно,
в ней отсутствует блок управления оптическими осями приёмной и передающей
оптических систем. Кроме того, объект 4, информацию о положении которого
необходимо определить, располагается в среде 3, ограниченной приемной и передающей оптическими системами 2 и 6.
Новая, синтезированная автором, обобщенная структурная схема преобразования информации в оптоволоконной измерительной системе, приведена на
рисунке 3.2.
Рисунок 3.2. Обобщенная схема оптоволоконной измерительной
системы, где: 1 – приемная оптическая система, 2 – передающая оптическая система, 3 – среда распространения излучения, 4 – объект контроля (стилус, палец оператора), 5 – матричный фотоприемник, 6 – СнК,
7 – система управления
Отличие обобщенной схемы оптоволоконной измерительной системы от
оптико-локационной, заключается в том, что объект контроля размещается
между приемной и передающей оптическими системами. При этом, для контроля
пространственного положения не используется отраженное от контролируемого
объекта излучение. Кроме того, из рассмотрения исключается фактор затухания
излучения в атмосфере, так при используемых геометрических размерах он несущественен, и на первом месте находится обратно квадратичная функция ослабления освещенности, создаваемой источником излучения.
80
3.2. Моделирование распределения оптической мощности
Примем следующие допущения:
-
приемная оптическая система 1 представляет собой множество вход-
ных апертур M, оптические центры которых распложены вдоль
—
;
-
линии
=
передающая оптическая система 2 представляет собой два излуча-
теля (ИК - диода), обладающих колоколообразной диаграммой направленности
в плоскости 0…• и представляемой полиномом седьмой степени ˜™ C . Диа-
грамма направленности излучателя задается данными производителя и имеет
вид, изображенный на рисунке 3.3 [107].
Рисунок. 3.3. Диаграмма направленности инфракрасного диода
AP3216F3C (Источник: Компания Kingbright)
Основным параметром излучателя, закладываемым при моделировании
будет являться его мощность – Р, и угол половинной мощности – „š› (для
AP3216F3C – 60 град.)
Среда распространения излучения 3 представляет собой сенсорное поле },
образуемое потоками излучения 78 и 79 , формируемыми передающей оптической системой 2, и падающими на приемную оптическую систему 1, размещенную в плоскости M . Очевидно, что:
81
} ≡ 78 ∩ 79 ∩ M;
(3.1)
освещенность, создаваемая излучателем на поверхностиM равна [94]:
œ
где:
=
x – мощность излучения,
•
ž+
cos γ ;
(3.2)
ρ – расстояние от центра излучателя до поверхности,
γ- угол падения луча на поверхность.
На рисунке 3.4. приведена оптико-геометрическая схема, положенная в основу построения модели, описывающей распределение освещенности, создаваемой источниками излучения на входных апертурах оптоволокон. Целью построения этой модели, является получение удобного инструмента, позволяющего
оценить требуемые мощности источников излучения, и их диаграмму направленности. Кроме того, эта модель дает возможность оценить влияние расположения
входных апертур оптоволокон, на их освещенность.
Учитывая, что излучаемая точечными источниками оптическая мощность
имеет диаграмму направленности, изображенную на рисунке 3.6, и представив
ее в виде функции ¢ γ , выражение (3.2) запишется в виде:
œ
Где:
=
γА* s œ t= tan
• £qА* s¥¦ t§¨©ª£qА* s¥¦ t§
¥¦ ¥‹*
§
«¬
£
+
s¥¦ ¥‹* t ƒ«¬ +
;
В общем случае задания функции¯
; = tan
Очевидно, что:
³
°
œ
−
,
±
p = < − ;
< = tan
82
;
(3.3)
в виде
œ
²;
−
«
£ §
¥
;
=
:
(3.4)
(3.5)
Рисунок 3.4. Оптико-геометрическая схема моделирования,
где: ´ - кисть человека-оператора,
П, П
- координата точки касания
пальцем кисти сенсорной поверхности,¶ x, y – линия расположения входных
апертур, S8 - первый точечный излучатель с координатами x· , y· ,
S9 - второй точечный излучатель с координатами x· , y· , ¸S8 - главная оптическая ось излучателяS8 , ¸S9 - главная оптическая ось излучателяS9 ,
78 – оптический поток излучателяS8 , 79 – оптический поток излучателяS9 ,
=S8 s œ ,
œt
– расстояние от оптического центра первого излучателя до точки
sx¹ , y¹ t на линии ¶, η – касательная к ¶ x, y в точке sx¹ , y¹ t, μ – нормаль к
¶ ,
в точке sx¹ , y¹ t, •8 – теневой сегмент от действия излучателя S8 ,
•9 – теневой сегмент от действия излучателя S9 , ¼T – входная апертура–го
оптоволокна, ¾S8 s œ , œ t- угол падения потока 78 в точку sx¹ , y¹ t,ÀS8 - угол
наклона ¸S8 к оси Y, ÁS8 ξ – прямая между оптической осьюS8 и точкой Ã,
ÄS8 – угол между центральной оптической осью ¸S8 и ÁS8 ξ
83
При построении модели в системе Matlab, распределение оптической мощ-
ности излучателей было представлено функцией ÅcÆEÇTN
пользовалось аппроксимация полиномом 7-го порядка.
, ,
, причем ис-
Исходный текст программы моделирования приведен в приложении 1.
В результате прогонки модели были получены графики распределения
освещенности входных апертур È = É
, ; - рисунок 3.5, и мощности излу-
чаемой источниками подсветки в направлении входных апертур («направленной
мощности») ˜ = ˜
, ; - рисунок 3.6.
Рисунок 3.5. Распределение освещенности на входных апертурах в
зависимости от угла наклона излучателя и расположения апертуры,
где:
– координата апертуры (мм), Betta – угол наклона излучателя к оси
… (град.), L –освещенность апертуры (Лк)
84
Рисунок 3.6. Распределение «направленной мощности» в сторону входных
апертур, где: x – координата апертуры, Betta– угол наклона излучателя к оси
… (град.), Power – мощность излучателя (мВт)
Более подробное изучение функции È = É
, ; позволило определить
оптимальное направление оптических осей излучателей S8 и S9 .
Так на рисунке 3.7. приведен график распределения освещенности вход-
ных апертур È = É
, ; с нанесенными маркерами при наклонах оптических
осей излучателя Ë на углы ±60 град. относительно осевой линии
3.4), и -координатах входной апертуры -100, 0 и +100 мм.
Моделирование поведения функций È = É
дилось в двойном цикле изменения
, ; и ˜ = ˜ , ; , прово-
, ; с шагом (1 мм, 0.1 град).
85
ε (рисунок
Рисунок 3.7. Распределение освещенности входных апертур с
измерительными маркерами для углов -60 и +60 град, где:
– координата
апертуры (мм), Betta – угол наклона излучателя к оси … (град.),
L – освещенность апертуры (Лк)
Можно отметить большой размах освещенности при угле наклона -60
град., который составляет
Ì
ÍÎ
= 0.1479/0.006583 ≈22.47.
Для угла наклона +60 град. это значение равно
̃ÍÎ = 0.03935/0.01518 ≈2.59,
что почти на порядок меньше.
Однако недостаток этой конфигурации заключается в малом значении
освещенности в точке
= 100 мм. и равном 0.01518 лк.
86
На рисунке 3.8 нанесены маркеры, показывающие значение освещенно-
стей входных апертур при наклоне оптических осей излучателя Ë на угол +43
град. относительно осевой линии ε (рисунок 3.4), и -координатах входной апертуры -100, 0 и +100 мм.
Рисунок 3.8. Распределение освещенности входных апертур с
измерительными маркерами для угла +43 град, где:
– координата апертуры
(мм), Betta – угол наклона излучателя к оси … (град.),
¯ – освещенность апертуры (Лк)
На рисунках 3.9 – 3.12 представлены графики зависимости освещенности
от угла наклона излучателей и расположения входных апертур волокна, полученных в результате численного моделирования и стендового исследования системы.
87
0,16
Освещенность, люкс
0,14
0,12
0,1
0,08
0,06
0,04
0,02
0
1
5
9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.9. График зависимости освещенность от координаты апертуры,
при уголе наклона излучателя -60 ̊ относительно оси …
0,12
Освещенность, люкс
0,1
0,08
0,06
0,04
0,02
0
1
5
9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.10. График зависимости освещенность от координаты апертуры, при
угле наклона излучателя к оси … в 0 ̊
88
0,08
Освещенность, люкс
0,07
0,06
0,05
0,04
0,03
0,02
0,01
0
1
5
9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.11. График зависимости освещенность от координаты апертуры, при
угле наклона излучателя к оси … в 20 ̊
0,05
0,045
Освещенность, люкс
0,04
0,035
0,03
0,025
0,02
0,015
0,01
0,005
0
1
5
9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.12. График зависимости освещенность от координаты апертуры, при
угле наклона излучателя к оси … в 43 ̊
89
В данной конфигурации виден некоторый подъем освещенности в середине рабочей зоны, а размах освещенности составляет:
̃ÓÔ = 0.03759/0.03562 ≈1.06,
что можно считать оптимальным значением, т.к. освещенность входных
апертур практически равномерна.
В таблице 1 приведены итоговые результаты данного численного эксперимента.
№ п.п.
Таблица 1. Итоговые результаты численного эксперимента.
1
2
3
Угол наклона
… - координата
оптической оси положения входизлучателя,
ной апертуры,
град.
мм
-60
+60
+43
Освещенность входной
апертуры, лк
-100
0.1479
0
0.1390
100
0.0066
-100
0.0152
0
0.0317
100
0.0394
-100
0.03562
0
0.0376
100
0.0364
Максимальная величина размаха освещенностей входных
апертур, Ì
22.47
2.59
1.06
Аналогично на рисунках 3.13 – 3.16 представлены графики зависимости
«направленной мощности» излучателя, в сторону входных апертур от угла
наклона излучателей и расположения входных апертур, полученных в результате
численного моделирования и стендового исследования системы.
90
«Направленная мощность» , мВт
1200
1000
800
600
400
200
0
1
5
9
13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.13. График зависимости «направленной мощности» от
координаты апертуры, при угле наклона излучателя -60 ̊ относительно оси …
«Направленная мощность» , мВт
1200
1000
800
600
400
200
0
1
5
9
13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.14. График зависимости «направленной мощности» от координаты
апертуры, при угле наклона излучателя к оси … в 20 ̊
91
«Направленная мощность» , мВт
1200
1000
800
600
400
200
0
1
5
9
13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.15. График зависимости «направленной мощности» от координаты апертуры, при угле наклона излучателя к оси … в 43 ̊
«Направленная мощность» , мВт
1200
1000
800
600
400
200
0
1
5
9
13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101
X - координаты приемных апертур
Результат моделирования
Результат испытаний
Рисунок 3.16. График зависимости «направленной мощности» от координаты
апертуры, при угле наклона излучателя к оси … в 0 ̊
92
4.3.
Основные выводы по главе:
1.
Предложена структурная схема преобразования изображения сцены
в первичные отсчеты;
2.
Разработаны математическая модель и оптико-геометрическая схема
распределения освещенности на входных апертурах оптоволокон;
3.
Получены результаты моделирования в виде трехмерных моделей;
4.
Определены значения углов наклона излучателей к поверхности рас-
положения входных апертур.
5.
Определены оптимальные параметры по расположению излучателя
относительно приемных апертур.
93
ГЛАВА 4. РАЗРАБОТКА И ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ
ОПТИКО-ВОЛОКОННОГО УСТРОЙСТВА ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ
В данной главе описана реализация предложенных выше оптико-геометрических и функциональных схем измерительных систем пространственного положения. Рассмотрены примеры выполнения поверхности теневой локации на
основе световодов, а также с помощью матричных видео сенсоров, фиксирующих изменение освещенности непосредственно на торцах световодов. Предложена реализация специализированного вычислительного устройства обработки
видеоинформации на основе ПЛИС фирмы Xilinx [108]. Данное устройство позволит реализовать законченное оптоэлектронное устройство. Приведены основные результаты реализации опытного образца, разработанного автором для демонстрации возможностей измерителя на основе световодов, интегрированного
в печатную плату.
При разработке прототипа было принято решение изменить временное разделение оптических потоков, формируемых пространственно разнесенными излучателями, фигурирующими в функциональных схемах рисунках 2.10, 2.11, на
спектральное. Кроме того, для упрощения изготовления опытного образца, было
использовано полимерное оптоволокно, обеспечивающее оптическую связь сенсорной поверхности с фотоприемной матрицей.
4.1. Основные технические решения по использованию теневых
составляющих для определения положения объекта
Опытный образец устройства выполнен на листе стеклотекстолита размером 120 х 160 мм, на котором закреплено полимерное оптоволокно, выходные
94
апертуры которого оптически связаны с матричным фотоприемником цифровой
телевизионной камеры.
Примененное полимерное оптоволокно, фирмы ООО «ТЦ ПОВ», г. Тверь
[109] изготовлено на основе полиметилметакрилата (ПММА), и обладает следующими оптическими параметрами:
- cветопотери при длине волны: 0,68мкм – 200…500 дБ/Км;
- числовая апертура: 0.4-0.45;
- критический радиус изгиба: 10 диаметров волокна;
- прочность разрывная, d=1мм: 8,35 кг/мм2;
- интервал рабочих температур: -50...+80 град. С;
- диаметр: 0.5 мм.
В качестве формирователей оптических потоков, использовались светодиоды фирмы KingBright, типа KT-2520QB10Z1S [110] и KT-2520SEL1Z1S [111].
Эти диоды отличает высокая оптическая мощность при малых размерах
рабочего тела и большой угол половинной мощности. На рисунке 4.1 приведена
диаграмма направленности данного типа светодиодов, на рисунке 4.2.a- спектральная плотность излучения диода KT-2520QB10Z1S, а на рисунке 4.2.b - спектральная плотность излучения диода KT-2520SEL1Z1S.
Рисунок 4.1. Диаграмма направленности светодиодов KT-2520
(Источник: KingBright)
95
a)
b)
Рисунок 4.2 Спектральная плотность излучения диодов:
a) - KT-2520SEL1Z1S, b) - KT-2520QB10Z1S (Источник: KingBright)
Обозначим оптический поток светодиода KT-2520SEL1Z1S - 78 , а опти-
ческий поток светодиода KT-2520QB10Z1S - 79 .
96
Используемая в макете цветная телевизионная камера, имеет стандартное
цветовое пространство, характеризуемое, спектральной чувствительностью отдельных каналов, вид которой приведен на рисунке 4.3 [112].
Рисунок 4.3. Типовая спектральная характеристика ПЗС-матрицы,
где: П – область взаимного проникновения спектральных составляющих)
Таким образом, почти полностью отсутствует сигнал светодиода, создаю-
щего поток 78 в канале S, и сигнал светодиода, создающего поток 79 , в ка-
нале e. Уровень взаимного проникновения равный ~0.02 в зоне П, может быть
учтен в процессе калибровки системы.
На рисунке 4.4. приведен внешний вид сенсорного модуля, входящего в
состав измерительной системы. Торцы световодов обращенные к излучателям
расположены таким образом, чтобы обеспечить «рабочую область» сенсорного
пространства 3. Торцы световодов 1 и 2 располагаются по периметру области 3,
световые потоки от излучателей 4 и 5 перекрывают торцы световодов обращенные к рабочей зоне.
97
Рисунок 4.4. Внешний вид сенсорного модуля, где: 1, 2 – массивы
полимерных световодов, 3 – сенсорная область, 4 – светодиод, формирующий
оптический поток 78 , 5 – светодиод, формирующий оптический поток 79 ,
6 – контролируемый объект, 7 – ПЗС-матрица цветной цифровой телекамеры
Объект 6 находящийся в рабочей зоне отбрасывает на торцах световодов,
две полутени синего и красного цвета. Остальные торцы световодов обращенные
к рабочей зоне освещены одновременно двумя излучателями. Световые потоки
проецируются на матрице 7, позволяют определить, какие световоды в данный
момент затенены первым и вторым излучателем.
Более детально образование теневых составляющих продемонстрировано
на рисунке 4.2. Очевидно, что входные апертуры оптоволокон, при отсутствии в
рабочей зоне объекта контроля, облучаются суммарным потоком 7Õ = 78 +
79 . Объект контроля, находящийся на пути 7Õ , вызывает появление теневых
составляющих 1 и 2 (рисунок 4.2). При этом термин «теневой», на самом деле
98
означает состоящий из излучения 7Õ − 79 = 78 ,(объект контроля загораживает поток79 ) для теневой составляющей 1, и состоящий из излучения 7Õ −
78 = 79 , объектконтролязагораживаетпоток78 для теневой составляющей 2.
Рисунок 4.2. Модель образования теневых составляющих на торцах
оптоволокон, где: 1 – теневая составляющая, формируемая оптическим
потоком 78 , 2 – теневая составляющая, формируемая оптическим
потоком 79 , 3 – объект контроля
Было предложено смонтировать оптико-волоконное устройство обработки
видеоинформации на двухслойной печатной плате с вмонтированным между
слоями оптоволокном, и иллюстрируется на рисунке 4.3. Детальное описание
используемой технологии внутреннего монтажа оптического волокна приведено
в первой главе.
99
Рисунок 4.3. Пример разработанной структуры, где: 1 – излучатели,
2 – нижний слой печатной платы, 3 – верхний слой, 4 – оптоволокна
Верхний слой ПП имеет вырез, являющийся рабочей зоной системы. Входные торцы оптоволокна расположены по двум сторонам данного окна и обращены к излучателям (развернутым под углом 30˚), как изображено на рисунке
4.11. расположенным на противоположной стороне окна, таким образом объект,
помещенный в любой точке рабочей области отбрасывает набор теней, необходимых для определения координат.
Рисунок 4.4. Расположение светодиодов
100
На рисунке 4.4, приведена фотография, полученная для объекта контроля 1,
находящегося вблизи линии расположения входных апертур. Видна зона 2, в которой отсутствуют излучения 78 и 79 . В зоне 3 присутствует излучение 78 ,
в зоне 4 - излучение 79 , в зоне 5 - излучение 7Õ .
Рисунок 4.3. Фотография, иллюстрирующая образование теневых
составляющих, где: 1 – объект контроля, 2 – полутень образуемая излучением
78 , 3 – полутень образуемая излучением 79 , 4 – полная тень от отсутствия
78 и 79 , 5 – зона освещения суммой потоков 78 и 79 , 6 – входная
апертура одного из волокон
На рисунке 4.4 приведена фотография, иллюстрирующая образование теневых составляющих при нахождении в рабочей зоне устройства пальца человекаоператора. Видны участки образования теневых сегментов, формируемых излу-
чениями 78 и 79 – 1 и 2 соответственно, а также участок полного затенения,
т.е. отсутствия всех потоков – 3.
101
Рисунок 4.4 Образование полутеней от пальца человека-оператора
Для оптической связи выходных торцов оптоволокон с ПЗС-матрицей
цифровой телевизионной камерой, был изготовлен оптический конвертер,
схема которого приведена на рисунке 4.5. Его функция заключается в переносе
изображения, формируемого на выходных торцах оптоволокон к ПЗС-матрице
цветной телевизионной камеры.
Рисунок 4.5. Оптический конвертер, где: 1 – печатная плата с ПЗС-матрицей,
2 – объектив телевизионной камеры, 3 – корпус, 4 – оптоволоконный жгут
102
На рисунке 4.6 приведена фотография сенсорной области, где объект контроля 1 расположен так, что не образуется зоны, в которой отсутствуют излучения 78 и 79 . В наличии зоны 2 и 3, образуемые потоками 78 и 79 соответ-
ственно.
Рисунок 4.6 Ситуация нахождения объекта контроля без образования
полного затенения где: 1 – объект контроля, 2 – полутень образуемая
излучением 78 , 3 – полутень образуемая излучением 79 , 4 – зона освещения
суммой потоков 78 и 79 , 5 – рабочая зона устройства
На рисунке 4.7 приведено изображение торца оптоволоконного жгута, для
ситуации, изображенной на рисунке 4.5. Можно видеть, что все оптоволоконные
срезы, имеют цветовую засветку. Причем видны как чистые засветки одним из
оптических потоков 78 или 79 , так и обоими, переданными фотографией в
виде «белого» цвета.
103
Рисунок 4.7. Изображение на срезе оптоволоконного жгута, входящего в
оптический конвертер, для ситуации, изображенной на рисунке 4.6.
На рисунке 4.8 приведена фотография сенсорной области, где объект контроля 1 расположен так, что образуется зона 2, в которой отсутствуют излучения
78 и 79 , а также зоны 3 и 4, образуемые потоками 78 и 79 соответственно.
Рисунок 4.8 Ситуация нахождения объекта контроля с образованием
полного затенения где: 1 – объект контроля, 2 – полутень образуемая
излучением 78 , 3 – полутень образуемая излучением 79 , 4 - полная тень от
отсутствия 78 и 79 , 5 – зона освещения суммой потоков 78 и 79
104
На рисунке 4.9 приведено изображение торца оптоволоконного жгута, для
ситуации, изображенной на рисунке 4.8.
Рисунок 4.9. Изображение на срезе оптоволоконного жгута, входящего в
оптический конвертер, для ситуации, изображенной на рисунке 4.8
Можно видеть, что часть оптоволоконных срезов, имеют цветовую засветку.
Причем видны как чистые засветки одним из оптических потоков 78 или 79 ,
так и обоими, переданными фотографией в виде «белого» цвета. Кроме того присутствуют и полностью незасвеченные оптоволокна «черного» цвета.
Анализ изображений оптоволоконных среза проводился с помощью компонента TVideoGrabber Video SDK в среде Delphi [113].
Текст процедуры обработки цветового сигнала видеокамеры, обеспечивающей кластеризацию номеров оптоволокон по принадлежности их к определенным цветовым составляющим, приведен в приложении 3.
В результате работы процедуры, формируются два массива
R_map, размерами
(есть/нет)
1000 х 1000, в которых находятся бинарные значения
спектральных
потокам 78 и 79 .
B_map и
составляющих,
105
соответствующих
оптическим
Рисунок 4.10. Стенд для экспериментальных исследований
оптико-волоконного устройства обработки видеоинформации, где:1 – результат
работы программы визуализации оптических потоков формирующих теневые
сегменты, 2 – визуализация изображения, формируемого на выходных торцах
оптоволокна, 3 – оптический конвертер, 4 – цифровая телевизионная камера,
5 – оптоволокна, 6 - оптоволоконный жгут, 7 – рабочая поверхность сенсора,
8 – объект контроля
На рисунке 4.10 продемонстрирован стенд для экспериментальных исследований оптико-волоконного устройства обработки видеоинформации. Визуализация изображения, формируемого на выходных торцах оптоволоконного жгута и
оптических потоков, формирующих теневые сегменты осуществляется специализированным ПО, реализованным в среде Delphi (текст программы приведен в
приложении 3).
106
4.2. Интеграция оптоэлектронного устройства с СнК
Для разработки прототипа устройства, как было сказано выше, было принято решение использовать FPGA фирмы Xilinx. При этом для сопряжения цифровой телевизионной камерой, были использованы возможности схемотехнического синтеза на FPGA, а задачи по цифровой обработки для ускорения процесса
их разработки было решено реализовать на основе Soft-процессора Microblaze,
поставляемого фирмой Xilinx в виде IP-модуля (Intellectual Property), используя
язык программирования С и С++, а также готовые библиотеки цифровой обработки сигналов.
Примененный автором инструментальный комплект Xilinx Kintex-7 FPGA
KC705 Evaluation Kit предназначен, в первую очередь, для аппаратной отладки
высокоскоростных цифровых устройств [114] встраиваемых микропроцессорных систем различного назначения, проектируемых на основе ПЛИС серии
Kintex-7. Конструктивное исполнение инструментального модуля Xilinx KC705
Evaluation Board представлено на рисунке 4.8.
Рисунок 4.11 – Конструктивное исполнение отладочного модуля
Xilinx KC705 (Источник: Корпорация Xilinx)
107
Основу архитектуры инструментального модуля Xilinx KC705 Evaluation
Board образует кристалл программируемой логики семейства Kintex-7
XC7K325T в корпусе FFG900, логические и специализированные ресурсы которого используются для реализации основной части отлаживаемого устройства
или встраиваемой микропроцессорной системы.
Структурное представление архитектуры этого отладочного модуля изображено на рисунке 4.12.
Рисунок 4.12 – Архитектура отладочного модуля Xilinx KC705
(Источник: Корпорация Xilinx)
Центральным элементом рассматриваемого отладочного модуля является
кристалл XC7K325T, который содержит 326 080 логических ячеек Logic Cells,
108
445 модулей блочной памяти Block RAM суммарной емкостью 16 020 кбит, 840
аппаратных секций цифровой обработки сигналов DSP48E1, 16 последовательных высокоскоростных приемопередатчиков RocketIO GTX, 1 аппаратный модуль интерфейса PCI Express, 1 аналого-цифровой блок XADC и 10 блоков
управления синхронизацией Clock Management Tiles (CMT) [115].
Кроме того, на плате размещены:
• Блок памяти.
• Интерфейсный блок.
• Схема конфигурирования ПЛИС.
• Программируемый блок формирования тактовых сигналов.
• Двухстрочный ЖК-дисплей.
• Элементы управления и индикации.
• Два разъема расширения, соответствующие спецификации стандарта
FMC.
• Разъем для подключения внешних сигналов к встроенному аналого-цифровому блоку XADC кристалла программируемой логики.
• Комплексная схема формирования и контроля питающих напряжений.
В состав блока памяти инструментального модуля Xilinx KC705 Evaluation
Board входит внешнее высокоскоростное ОЗУ, элемент параллельного Flash
ППЗУ с интерфейсом BPI (Byte Peripheral Interface), элемент последовательного
Flash ППЗУ с интерфейсом Quad-SPI (QSPI), EEPROM ППЗУ, а также элементы,
предназначенные для реализации интерфейса SDIO карт памяти формата SD.
Внешнее высокоскоростное ОЗУ реализовано в виде стандартного субмодуля
синхронной динамической памяти SODIMM SDRAM с интерфейсом DDR3
MT8JTF12864HZ-1G6G1, который выпускает фирма Micron Technology
Incorporated. Этот субмодуль обладает информационной емкостью 1 Гбайт и
64-разрядной шиной данных. Контроллер интерфейса DDR3 конфигурируется на
базе ресурсов ПЛИС XC7K325T.
109
Общий вид спроектированной автором системы представлен на рисунке
4.13 и представляет собой стенд с закрепленной на штативе сенсорным модулем,
оптоволоконным жгутом, оптическим конвертером и цифровой телевизионной
камерой, подключенной к ПЛИС XC7K325T Xilinx.
Рисунок 4.13. Стенд для исследования и отладки, где: 1 – оптоволокна,
2 – объект контроля, 3 – оптический конвертер, 4 – цифровая телевизионная
камера, 5 – отладочная плата KС705
Обработка данных цветной телевизионной камеры осуществляется 32
битным процессором MicroBlaze, IP-ядро которого поставляется фирмой Xilinx
в составе инструментальных сред разработки ISE, Vivado, PlanAhead. Верхний
уровень проекта FPGA разрабатывался автором в среде PlanAhead 14.7.
110
Структурная схема процессора MicroBlaze, изображена на рисунке 4.14.
Рисунок 4.14 Структурная схема процессора MicroBlaze
(материал фирмы Xilinx)
На рисунке 4.15 приведено изображение структуры процессора MicroBlaze, ver. 8.50, синтезированного в среде EDK 14.7 (Xilinx) [116].
Управление цветной телевизионной камерой осуществляется с помощью
IP-модуля, разработанного автором в среде ISE 14.7 (Xilinx) и подключенного к
AXI-магистрали 32-битного процессора MicroBlaze.
111
Рисунок 4.15. Структура процессора MicroBlaze, где:
1 – AXI шина связи с периферийными устройствами, 2 – AXI шина связи с
внешней памятью DDR3, 3 – IP-модуль связи с цифровой телевизионной
камерой, 4 – IP-модуль интерфейса RS232, 5 – IP-модуль EthernetMAC,
6 – Модуль MicroBlaze
Для передачи информации в ПК, в состав процессора введен IP-модуль
низкоскоростного интерфейса RS-232(Xilinx). Кроме того, заложена возможность подключения в высокоскоростной среде Ethernet, для чего в структуру
процессора включен IP-модуль EthernetLiteMAC (Xilinx).
В приложении 2 приведена секция IP-модуля digital_video_camera VER =
1.00.a. листинга спецификации аппаратной платформы MicroBlaze, сгенерированная в среде EDK 14.7 Xilinx.
112
4.3.
Основные результаты и выводы по главе:
1.
Разработан оптоволоконный сенсор, оптически связанный с ПЗС-
матрицей цветной телевизионной камеры;
2.
Проведен анализ требований оптико-электронных компонентов
(оптоволокно, оптические излучатели, ПЗС-матрица);
3.
Предложена структура СнК, для обработки сигнала цифровой теле-
визионной камеры;
4.
Разработаны модели распределения теневых сегментов на входных
апертурах и трехмерная модель оптоволоконного сенсора;
5.
Изготовлена конструкция оптоволоконного сенсора и его связи с
ПЗС-матрицей цифровой телевизионной камеры;
6.
Синтезирован FPGA-проект на основе встроенного процессора Mi-
croBlaze и разработан специализированный IP-модуль сопряжения цифровой телевизионной камеры с AXI - шиной;
7.
Получены фотографические изображения образования теневых сег-
ментов в разных режимах, а также изображения цветовых карт на выходных торцах оптоволокон;
8.
Разработано специализированное ПО в среде Delphi, для визуализа-
ции работы оптоволоконного сенсора;
113
Заключение
В рамках выполненной автором диссертационной работы были
1.
Рассмотрены различные виды световодов, показаны их особенности,
а также приведены варианты различного их исполнения.
2.
Рассмотрены основные оптические эффекты, приводящие к распро-
странению света в световоде.
3.
Рассмотрены существующие на данный момент разработки по тех-
нологиям формирования планарных световодов на печатных платах и внутреннего монтажа оптического волокна. Выявлены достоинства и недостатки представленных технологий.
4.
Выбрана технология внутреннего монтажа оптического волокна для
создания тестового стенда для исследования и отладки устройства, как наиболее
удовлетворяющая требованиям, и отличающаяся простотой реализации.
5.
Разработана оптическая схема определения пространственного поло-
жения объекта контроля с использованием линейчатого фотоприемника, объектива содержащего цилиндрическую линзу и двух пространственно разнесенных
излучателей.
6.
Разработана оптическая схема определения пространственного по-
ложения и скорости касания с опорной плоскостью объекта контроля с использованием линейчатого фотоприемника, объектива содержащего цилиндрическую линзу и четырех пространственно разнесенных излучателей.
7.
Разработаны функциональные схемы устройств определения про-
странственного положения объекта контроля, использующие описанные выше
оптические схемы. Новизна предложенных технических решений, защищена
двумя патентами РФ на изобретения.
8.
На основе обобщенной оптической схемы измерения пространствен-
ного положения, разработано устройство измерения пространственного положения на основе планарных световодов, интегрированных в полимерную основу.
9.
Получен патент РФ на данное устройство.
114
10.
Проведен анализ получения теневых составляющих на торцах вход-
ных апертур световодов, и на его основе, получена система уравнений для определения пространственного положения объекта контроля и показана возможность повышения точностных характеристик при расширении входных апертур
планарных световодов.
11.
Разработан метод формирования планарных световодов на печатной
плате, предложены алгоритмы технологических процессов формирования световодов методами контактной фотолитографии и наноимпринт литографии.
12.
Разработано многослойное исполнение предложенного устройства.
Предложен алгоритм технологического процесса формирования многослойной
структуры.
13.
Предложена структурная схема преобразования изображения сцены
в первичные отсчеты для оптоволоконной измерительной системы.
14.
Разработаны математическая модель и оптико-геометрическая
схема распределения освещенности на входных апертурах оптоволокон;
15.
Получены результаты моделирования в виде трехмерных моделей;
16.
Определены оптимальные значение углов наклона излучателей к по-
верхности расположения входных апертур.
17.
Разработан оптоволоконный сенсор, оптически сопряженный с ПЗС-
матрицей цветной телевизионной камеры;
18.
Проведен анализ требований оптико-электронных компонентов
(оптоволокно, оптические излучатели, ПЗС-матрица);
19.
Предложена структура СнК, для обработки сигнала цифровой теле-
визионной камеры;
20.
Разработаны модели распределения теневых сегментов на входных
апертурах и трехмерная модель оптоволоконного сенсора;
21.
Изготовлена конструкция оптоволоконного сенсора и его связи с
ПЗС-матрицей цифровой телевизионной камеры;
115
22.
Синтезирован FPGA-проект для микросхемы XC7K70T (Xilinx) на
основе встроенного процессора MicroBlaze и разработан специализированный
IP-модуль сопряжения цифровой телевизионной камеры с AXI – шиной;
23.
Получены экспериментальные изображения образования теневых
сегментов в различных ситуациях расположения пальца человека-оператора информационной системы, а также изображения цветовых карт на выходных торцах оптоволокон;
24.
Разработано специализированное ПО в среде Delphi, для визуализа-
ции работы оптоволоконного сенсора.
116
Список литературы
1.
Кеменов В.Н., Нестеров С.Б. Вакуумная техника и технология. Учебное
пособие по курсу «Криовакуумная техника» для студентов ИТТФ и ЭТФ
МЭИ (ТУ) и МИЭМ (ТУ). Москва: Издательство МЭИ, 2002. 84 с.
2.
Барб Д.Ф., Кэмпана С. Изображающие приборы с зарядовой связью //
Достижения в технике воспроизведения изображений, том. 3, 1980.
с. 180-305.
3.
Самарин А. Позиционно-чувствительные фотодатчики // Электронные
компоненты, 2003. с. 103-108.
4.
Муслина Г.Р., Правиков Ю.М. Измерение и контроль геометрических
размеров деталей машин и приборов. Ульяновск: УлГТУ, 2007. 220 стр.
5.
Катыс
Г.П.
Оптические
информационные
системы
роботов-
манипуляторов. Москва: «Машиностроение», 1977.
6.
Пупков К.А., Путилов Г.П. Принципы построения систем технического
зрения // Научные проблемы робототехники, 1980.
7.
Frankowski G., Chen M., Huth T.. Optical Measurement of the 3D-Coordinates
and the Combustion Chamber Volume of Engine Cylinder Heads Proc.
pp. 593 – 598.
8.
Walecki W.J., Szondy F., Hilali M.M. Fast in-line surface topography
metrology enabling stress calculation for solar cell manufacturing for
throughput in excess of 2000 wafers per hour // Meas. Sci. Technol, 2008.
9.
Авербух В.Л., Зырянов А.В.. Методы манипуляции объектами в
трехмерных визуальных средах // Вопросы атомной науки и техники.
Серия:
Математическое
моделирование
№ 3, 2009. с. 58-69.
117
физических
процессов.
10.
Мухин И.А. Сенсорные экраны - решение проблем (10 технологий)
BROADCASTING // Телевидение и радиовещание, том. 2. № 4,
2006. с. 50-52.
11.
Александр Самарин. Современные технологии Multi-touch сенсорных
экранов // КОМПОНЕНТЫ И ТЕХНОЛОГИИ, № 1, 2008. с. 134-140.
12.
Leonid Sigal. Marker-based Motion Capture. Human Motion Modeling and
Analysis, 2012. презентация.
13.
Jessica Hodgins. Motion Capture Technologies. 2012. Презентация.
14.
Matthew Loper, Naureen Mahmood, Michael J. Black. MoSh: Motion and
Shape Capture from Sparse Markers // Max Planck Institute for Intelligent
Systems. 2013.
15.
Scharstein D., Szeliski R.A. A taxonomy and evaluation of dense two frame
stereo correspondence algorithms // International Journal of Computer Vision,
No. 47, 2002. pp. 7-24.
16.
Тишкин В.О. Методика сборки и обработки данных, полученных в
процессе 3D-сканирования // Научно-технический вестник СанктПетербургского государственного университета. 2001. № 1. с. 87-92.
17.
Zhengyou Zhang. Microsoft Kinect Sensor and Its Effect // University of
Missouri/ Microsoft Research. 2012.
18.
Zhengyou Zhang. A Flexible New Technique for Camera Calibration,
Microsoft Research. Microsoft Corporation, Redmond, Technical Report
MSR-TR-98-71. 2009.
19.
Петропавловский Ю.В. Особенности применения ПЗС матриц с
межстрочным переносом // КОМПОНЕНТЫ И ТЕХНОЛОГИИ, № 5, 2009.
20.
Корпорация Agilent technologies. // URL: http://www.agilent.com/about/
newsroom/presrel/2005/31may-sp05039.html (дата обращения: 16.08.2015).
118
21.
Корпорация Agilent technologies. Agilent ADNK-3083. //
URL:
http://www.efo.ru/components/avago/catalog/files/pdf/5989-3099EN.pdf (дата
обращения: 16.08.2015).
22.
Корпорация Аgilent technologies. Agilent ADNS-2051 Optical Mouse Sensor
// URL: http://bdml.stanford.edu/twiki/pub/Rise/OpticalDisplacementSensor/
ADNS2051.pdf (дата обращения: 08.16.2015).
23.
Зубарев
Ю.М.,
координатных
Косаревский
измерений.
С.В.,
Ревин
Учебное
Н.Н.
пособие.
Автоматизация
Санкт-Петербург:
Санкт-Петербургский институт машиностроения (ЛМЗ-ВТУЗ). 2011.
24.
Albrecht H., Beier A., Demmer P., Franke M., Modinger R., Pfeiffer K.,
Beil P., Kostelnik J., Bauer J., Ebling F., Schroder H., Griese E. New-generation
interconnect, Information Photonics // OSA Topical Meeting. 2005. pp. 1-3.
25.
Маругин А.В. Исследование характеристик волоконных световодов.
Лабораторный
практикум.
Нижний
Новгород:
НИУ
НГУ
им.Лобачевского, 2011. 36 стр.
26.
Бабин
С.А.
Волоконные
лазеры:
[Электронный ресурс], Презентация
27.
достижения
и
перспективы.
2011.
Макаров Н.С. Оптические волоконные усилители информационных
сигналов. // Научно-технический вестник СПбГИТМО (ТУ). Выпуск 6.
Информационные, вычислительные и управляющие системы. СПб.:
2002. с. 191–199.
28.
Сорокин Ю.В. Лазерно-оптические системы и технологии. Москва: ФГУП
"НПО АСТРОФИЗИКА", 2009. с. 78–80.
29.
Nikolae V.M. Novel Compact Waveguide Optical Chemical Sensor for Control
of Gaseous Ammonia Concentration. Environment and Ecology Research 1(2),
2013. 52-57 pp.
119
30.
Подсвиров О.А., Сидоров А.И., Чураев Д.В. Особенности формирования
оптических волноводов в силикатном стекле при высокой энергии и дозе
электронного облучения. 11-е издание. том 84. СПб: Журнал технической
физики, 2014. с. 96-100.
31.
Brandon W. Swatowski, Chad M. Amb, Sarah K. Breed, David J. Deshazer,
W. Ken Weidner. Flexible, Stable, and Easily Processable Optical Silicones for
Low Loss Polymer Waveguides. Organic Photonic Materials and Devices XV,
2013. pp. 13-24.
32.
Holden H. HDI use in optical waveguides. The PCB Magazine, 2013. 12-30 pp.
33.
Харитонова К. Ю. Волоконные световоды с сильно депрессированной
промежуточной оболочкой. дис. канд. физ мат. наук : 01.04.21 /
Харитонова Ксения Юрьевна; науч. рук. Е.М. Дианов, А.С. Беланов.
Москва: МГАПИ, 2003. 135 стр.
34.
Слипченко С.О., Подоскин А.А., Пихтин Н.А., Золотарев В.В., Шашкин
И.С., Лешко А.Ю., Лютецкий А.В., Растегаева М.Г., Тарасов И.С., Копьев
П.С. Многоволновый интегральный оптический модулятор лазерного
излучения на основе полупроводниковых гетероструктур. Физика и
техника полупроводников. 5-е издание. Том 48. СПб. 2014. с. 710-716.
35.
Скибина Ю.С., Тучин В.В., Белоглазов В.И., Штейнмайер Г., Бетге Й.Л.,
Веделль Р., Лангхофф Н. Фотонно-кристаллические волноводы в
биомедицинских исследованиях, том 41 №4. Москва: Квантовая
электроника, 2011. 146 стр.
36.
Щука А.А. Электроника. 2 издание. СПб.: 2008. 426 стр.
37.
Устюжанин С. В. Динамически управляемые дифракционные структуры
на основе фотополимерных жидкокристаллических материалов для
оптических систем связи: дис. канд. физ мат. наук : 01.04.05 / Устюжанина
Сергея Владимировича; науч. рук. С.Н. Шарангович. Томск: ТУСУР,
2012. 176 стр.
120
38.
Сидоров А.И., Никоноров Н.В. Материалы и технологии интегральной
оптики. Учебное пособие. СПб: ИТМО, 2009. с. 35-37.
39.
Шумкова Д.Б. Специальные волоконные световоды: учеб. пособие.
Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2011. 178 стр.
40.
Сидоров А.И., Никоноров Н.В. Материалы и технологии волоконной
оптики: Оптическое волокно для систем передачи информации. Учебное
пособие. СПб: ИТМО, 2009. с. 11-31.
41.
Кузнецова Т.И., Распопов Н.А. Схема возбуждения плазмонов на границе
металла с фотонным кристаллом. Москва: ЖЭТФ, 2014. с. 455-461.
42.
Кульчин Ю.Н., Витрик О.Б., Дышлюк А.В., Гурбатов С.О. Возбуждение
поверхностного плазмонного резонанса в изогнутом одномодовом
световоде с металлизированной оболочкой: численное моделирование.
Том 40. № 24. Письма в Журнал технической физики, 2014. с. 39-46.
43.
Самарченко Д.А. Лабораторный практикум ОПТИКА (для выполнения на
модульных установках) в 3-х частях. Москва: МИФИ, 2009. 15 стр.
44.
Лиокумович
Л.Б.
Волоконно-оптические
интерферометрические
измерения. Часть 1. Волоконно-оптические интерферометры. СПб: Изд-во
Политехн. ун-та, 2007. 110 стр.
45.
Collin R. E. Field Theory of Guided Waves. 2nd ed. IEEE Press-Oxford
University Press, 1990.
46.
Chen C.L. Foundations for Guided-Wave Optics. Wiley-Interscience, 2006.
47.
Marcuse
D.
Theory
of
Dielectric
Optical
Waveguides.
2nd
ed.
1991: Academic Press.
48.
Okamoto K. Fundamentals of Optical Waveguides. 2nd ed. Academic
Press, 2005.
49.
Snyder A. W., Love J.. Optical Waveguide Theory. 1st ed. Springer, 2003.
50.
Kapany N. S., Burke J. J. Optical Waveguides. Academic Press, 1973.
51.
Dyott R. B. Elliptical Fiber Waveguides. Artech House Publishers, 2007.
121
52.
Calvo M. L., Lakshminarayanan V.. Optical Waveguides: From Theory to
Applied Technologies. 1st ed. CRC Press, 2007.
53.
Koshiba
M.
Optical
Waveguide
Analysis.
1st
ed.
McGraw-Hill
Professional, 1992.
54.
Yamauchi J. Propagating Beam Analysis of Optical Waveguides // Inst. of
Physics Pub. Inc. 2003.
55.
Yasumoto K. Electromagnetic Theory and Applications for Photonic Crystals //
CRC Press. 2005. pp. 103.
56.
Троицкая Е.В., Молчанова С.И., Соколов В.И. Сборник докладов XII
Международной научной конференции «Физико-химические процессы
при селекции атомов и молекул в лазерных, плазменных и нанотехнологиях» // Формирование полимерных волноводов для интегральнооптических устройств с использованием контактной фотолитографии.
Москва. 2009.
57.
Панченко В.Я., Соколов В.И. Сборник тезисов докладов Международного
форума
по
нанотехнологиям,
Роснано
//
Лазерные
технологии
формирования полимерных элементов микро и нанофотоники для
высокоскоростных
информационных
систем.
Роснано.
2007.
Том 1. с. 145- 147.
58.
Молчанова С.И., Китай М.С., Соколов В.И., Троицкая Е.В. Сборник
докладов
Международной
XII
научной
конференции
«Физико-
химические процессы при селекции атомов и молекул в лазерных,
плазменных
и
фторсодержащих
нано-
технологиях»
акриловых
//
мономеров
Оптические
и
свойства
полимеров
в
телекоммуникационной области длин волн вблизи 0,85 мкм. Ершово,
Московская область. 2008. с. 209-214.
122
59.
Sokolov V.I., Mishakov G.V., Panchenko V.Ya., Tsvetkov M.Yu. Routes to
Polymer-Based Photonics // Optical Memory and Neural Networks
(Information Optics). 2007. Vol. 16. №. 2. pp. 67.
60.
Соколов В.И., Панченко В.Я. Создание элементной базы устройств для
высокоскоростных теле- и дата-коммуникаций на основе субмикронных
лазерных технологий // Cборник «Пути Ученого, Е.П. Велихов».
2007. с. 421 - 431.
61.
Mishakov G., Sokolov V., Kocabas A., Aydinli A. Gratings in polymeric
waveguides // Proc. SPIE, No. 6613, 2007. pp. 123.
62.
Баум О.И., Варламова Н.В., Западинский Б.И., Мишаков Г.В., Соколов
В.И. Плавно перестраиваемый волоконный аттенюатор для диапазона
длин волн вблизи 1.5 мкм // Квантовая Электроника, том 34,
№ 8, 2004. с. 1-3.
63.
Schröder H., Brusberg L., Arndt-Staufenbiel N., Richlowski K., Ranzinger C.,
Klaus-Dieter
Lang.
Advanced
Thin
Glass
Based
Photonic
PCB Integration, 2011.
64.
Papakonstantinou I., Selviah D.R., Fernandez F.A. Multimode laterally tapered
bent waveguide modelling // 17th Annual Meeting of the IEEE Lasers and
Electro-Optic Society. Puerto Rico. 2004. pp. 983-984.
65.
Rashed A.M., Papakonstantinou I., Selviah D.R. Modelling of Polymer
Thermo-optic Switch with Tapered Input for Optical Backplane // 17th Annual
Meeting
of
the
IEEE
Lasers
and
Electro-Optic
Society.
Puerto Rico. 2008. pp. 457-458.
66.
Schröder H., Arndt-Staufenbiel N., Brusberg L. "GlassPack" – Photonic
Packaging using thin glass foils for Electrical-Optical // Electronics
Systemintegration Technology Conference. Greenwich. 2008. pp. 1245-1250.
67.
Schröder H., Arndt-Staufenbiel N., Beier A., Ebling F., Franke M., Griese E.,
Intemann S., Kostelnik J., Kühler T., Mödinger R., Roda I., Schlosser I. Thin
123
Glass Based Electrical-Optical Circuit Boards (EOCB) Using Ion exchange
Technology for Graded-Index Multimode Waveguides // Proc. 58st ECTC.
Lake Buena Vista. 2008. pp. 268-257.
68.
Brusberg L., Lang G., Schröder H. Thin glass based packaging and photonic
single-mode waveguide integration by ion exchange technology on board and
module level // Proc. SPIE Photonics West 2011, OPTO. 2011.
San Francisco. 2010.
69.
Brusberg L., Schröder H., Erxleben R., Ndip I., Töpper M., Nissen N., Reichl
H.. Glass Carrier Based Packaging Approach Demonstrated on a Parallel
Optoelectronic Transceiver Module for PCB Assembling // Proc. 60th
Electronic Components and Technology Conference. Las Vegas. 2010.
70.
Cartier M., Chan J., Cohen T., Kirk B. Advanced Design Techniques to Support
Next Generation Backplane links Beyond 10 Gbps // DesignCon.
Santa Clara. 2007.
71.
Havermann G., Witte M. Artificial card edge interfaces for 10Gbps module
cards: How the high speed propagation characteristics are affected by
exchanging the PCB-edge with a connector // DesignCon. Santa Clara. 2007.
72.
Schröder H., Arndt-Staufenbiel N., Beier A., Ebling F., Franke M., Griese E.,
Intemann S., Kostelnik J., Kühler T., Mödinger R., Schlosser I., Ostrzinski U.,
Pfeiffer K. 240 Gbit/s parallelopticaltransmissionusing double layerwaveguides
in thinglasssheets // 2nd Int. Symp. on Photonic Packaging, IEEE-LEOS. 2008.
73.
Papakonstantinou I., Wang K., Selviah D.R., Fernandez F.A. Transition,
radiation and propagation loss in polymer multimode waveguide bends // Optics
Express. Vol. 15. pp. 669-679.
74.
Ma H., Jen A.K., Dalton L.R. Polymer based optical Waveguides: Materials,
Processing, and Devices // Adv. Mater. 2002. Vol. 19. pp. 1339-1365.
124
75.
Brusberg L., Schröder H., Töpper M., Reichl H. Photonic System-in-Package
technologies using thin glass substrates // 11th Electronics Packaging
Technology Conference. Singapore. 2009. pp. 930-935.
76.
Uhlig S., Fröhlich L., Chen M., Arndt-Staufenbiel N., Lang G., Schröder H.,
Houbertz R., Popall M., Robertsson M. Polymer Optical Interconnects - A
Scalable Large-Area Panel Processing Approach // IEEE Transactions on
Advanced Packaging, Vol. 29, No. 1. pp. 158- 170.
77.
Shibata T., Matsuoka Y., Ban T. A high-coupling efficiency multilayer optical
printed wiring board with a cubecore structure for high-density optical
interconnection // Proc. of 57th ECTC. May 2007. pp. 1275-1289.
78.
Brusberg L., Schlepple N., Schröder H. Chip-to-chip Communication by
Optical Routing Inside a Thin Glass Substrate // Proc. 61st ECTC 2011, 2011.
pp. 805-812.
79.
Hendrickx N., Van Steenberge G., Geerinck P., Van Daele P. Laser ablation as
enabling technology for the structuring of optical multilayer structures // Journal
of Physics: Conference Series. 2007. Vol. 59. pp. 118-21.
80.
Li J., Ananthasuresh G.K. A quality study on the excimer laser micromachining
of electro-thermal-compliant micro devices // Journal of micromechanics and
microengineering : structures, devices, and systems, Vol. 11. 2001. pp. 38-47.
81.
Li L., Hong M., Schmidt M., Zhong M., Malshe A., Huis In’tveld B.,
Kovalenko V. Laser nano-manufacturing – State of the art and challenges //
CIRP Annals - Manufacturing Technology. 2011.
82.
Liu Y., Lin L., Choi C.C., Bihari B., Chen R.T. Polymer based board-level
optoelectronic interconnects via micro mirror coupler // Proc. SPIE 4292.
2001. pp. 141-149.
83.
Liang C.T.W., Yee H.L., Shiah L.L., Wei T.C., Yoon J.C.Y., Jie Y.G., Guan
L.T., Ramana P.V., Lau J.H., Chang R., Tang T., Chiang S., Cheng D., Tseng
T.J. Fabrication and Optimization of the 45° Micro-mirrors for 3-D Optical
125
Interconnections // Proceedings of the 10th Electronics Packaging Technology
Conference. 2008. pp. 1121-1125.
84.
Sara T. Parker, Peter Domachuk, Jason Amsden, Jason Bressner, Jennifer A.
Lewis, David L. Kaplan, Fiorenzo G. Omenetto. Biocompatible Silk Printed
Optical Waveguides // Advanced Materials. 2009.
85.
Deane Peter, Shadow detection in optical touch sensor through the linear
combination of optical beams and grey-scale determination of detected shadow
edges. US Patent № 7809221. Oct 05. 2010.
86.
Noriyuki Juni. Hajime Nishio. Optical waveguide with photoelectric conversion
element and optical touch panel. US Patent № 8111958 B2. Feb 12. 2012.
87.
Noriyuki Juni., Lens-equipped optical waveguide device for touch panel and
manufacturing method thereof. US Patent № 7496265 B2. Feb 23. 2009.
88.
Noriyuki Juni., Optical waveguide device for touch panel and touch panel using
the same, US Patent № 7805036 B2. Sep 28. 2010.
89.
Carlo Tomasi. Salih Burak Gokturk. Method and apparatus for approximating
depth of an object's placement onto a monitored region with applications to
virtual interface devices. US Patent № 7006236 B2. Feb 28. 2006.
90.
Satoshi Sano. Fumihiko Nakazawa. Atsuo Iida. Nobuyasu Yamaguchi.
Fumitaka Abe., Optical scanning-type touch panel. US Patent № 6480187 B1.
Nov 12. 2002.
91.
Fumihiko Nakazawa. Satoshi Sano. Atsuo Iida. Nobuyasu Yamaguchi.
Yasuhide
Iwamoto.
Optical
scanning-type
touch
panel.
US Patent № 6492633 B2. Dec 10. 2002.
92.
Yasuhide Iwamoto. Satoshi Sano. Fumihiko Nakazawa. Nobuyasu Yamaguchi.
Touch location by retroflected scanned optical beams. US Patent № 6844539
B2. Jan 12. 2005.
93.
Satoshi Sano. Yasuhide Iwamoto. Fumihiko Nakazawa. Nobuyasu Yamaguchi.,
Optical scanning-type touch panel. US Patent №7522156 B2. Apr 21. 2009.
126
94.
Литманович Д.М. Литманович А.М. Закрытной A.A., Оптическое
сенсорное устройство. Патент РФ № 2542947 C2. Ноябрь 28 2014.
95.
Литманович Д.М. Литманович А.М., Устройство для организации
интерфейса с объектом виртуальной реальности. Патент РФ № 2486608.
Июнь 27 2013.
96.
Литманович Д.М. Литманович А.М., Сенсорное устройство с измерением
динамического воздействия. Патент РФ № 2542949 C2. май 24 2013.
97.
Панов В.А., Кругер М.Я., Кулагин В.В., Погарев Г.В., Левинзон А.М.,
Долинский И.М., Михайлов Н.А., Резницкий Б.Г., Калинин М.И., Рагузин
Р.М.. Справочник конструктора оптико-механических приборов. 3-е
издание. Ленинград: "Машиностроение". 1980. 103 стр.
98.
Корпорация "ATMEL". Very Highresolution Linear CCD Image Sensor
(12000 Pixels) // URL: http://www.gaw.ru/pdf/Atmel/ccd/th7834c.pdf (дата
обращения: 02.08.2015).
99.
Корпорация "Hamamatsu". CMOS linear image sensor S9227 // URL: http://
shpat.com/docs/elfa/07520786.pdf (дата обращения: 02.08.2015).
100. Peter Deane, Shadow detection in optical touch sensor through the linear
combination of optical beams and grey-scale determination of detected shadow
edges. US Patent №7809221 B2. Oct 05. 2010.
101. Shimizu Yusuke. Noriyuki Juni., Optical waveguide for touch panel, touch
panel using the optical waveguide and manufacturing method of the optical
waveguide. US Patent №7957615 B2. Jun 07. 2011.
102. Литманович Д.М., Сенсорная панель на основе световодов. Патент РФ
№ 2541849 C2. январь 28 2013.
103. Дорофеев С.Г, Васильев Р.Б. Вакуумное напыление тонкопленочных
структур. Москва: Московский государственный университет им.
Ломоносова. 2011.
127
104. Лапшинов
Б.А.
Технология
литографических
процессов.
Учебное пособие. Москва: Московский государственный институт
электроники и математики. 2011.
105. Аракчеева Е.М. Танклевская Е.М. Нестеров С.И. Получение фотонных
кристаллов в структурах на основе полупроводников и полимеров с
использованием метода наноимпринта // Журнал технической физики,
2005.
106. Молебный
В.В.
Оптико-локационные
системы.
Москва:
Машиностроение, 1981. 181 стр.
107. Компания
KingBright.
Справочный
материал.
http://www.kingbrightusa.com /images/catalog/SPEC/AP3216F3C.pdf
108. Корпорация Xilinx. 7 Series FPGAs Overview. Advance Product.
URL:http://www.xilinx.com/support/documentation/data_sheets/ds180_7Serie
s_ Overview.pdf (дата обращения: 26.08.2015)
109. Технологический центр полимерного оптического волокна. URL: http://
www.pofcentre.ru/production/pof (дата обращения: 26.08.2015).
110. Компания KingBright. // URL:http://www.kingbright-europe.de/download/
High-brightness%20LED/KT-2520QB10Z1S(Ver.3).pdf (дата обращения:
26.08.2015).
111. Компания KingBright. datasheetlib.com // URL:http://www.datasheetlib.com/
datasheet/1093060/kt-2520se9z1s_cml-chicago-miniature-lamp.html
(дата
обращения: 26.08.2015).
112. Петропавловский Ю.В. Параметры и особенности применения ПЗСматриц с прогрессивным сканированием фирмы Sony // Компоненты и
технологии
№ 8. 2010. №. 8. с. 77-84.
113. Datastead Software. // URL:http://www.datastead.com/products/tvideograbber/
overview.html (дата обращения: 27.08.2015).
128
114. Корпорация Xilinx. KC705 Evaluation Board for the Kintex-7 FPGA User
Guide, Xilinx. 2012г.
115. Корпорация Xilinx. 7 Series FPGAs Overview. Xilinx. 2015г.
116. Корпорация Xilinx. MicroBlaze Processor Reference Guide. Embedded
Development Kit EDK 12.1. Xilinx. 2015г.
129
ПРИЛОЖЕНИЕ 1
clear;
x0=-50; % координаты X
y0=-50; %
Y центра излучателя
rr=100; % радиус сенсорной линии
pmax=1000; % мощность излучателя
giz05=60; % угол половинной мощности излучателя
%-----------------------------------------------------------------------x = -100 ;
% x - в пределах -100...+100
% наращивание k на 1 - x увеличивается на 0,5 мм
for k=1:1:201;
xx(k) = x;
alpha = ugol(x,rr); % Угол ALPHA
y = sqrt(rr^2 - x^2); % Координата Y на сенсорной линии
ro = r(x,x0,y,y0); % Расстояние от центра излучателя до точки (x, y)
g = gama(x,x0,y,y0); % Угол GAMMA
%
alpha, gamma
nu= alpha + g; % Угол NYU
betta= -60; % начальный поворот центральной опт.оси излучателя
% giz - Угол наклона опт.потока относительно оси излучателя
for k2=1:1:121 % изменение угла наклона
%центральной опт.оси излучателя
% в пределах -60...+=60
giz= betta-g;
p1 = p5(pmax, giz, giz05);% Мощность излучателя (30гр.0.5P)в направлении (x,y)
p11(k,k2)=p1;
p2 = p1*cosd(nu)/(ro^2); % Освещенность в точке (x, y)
p22(k,k2) = p2;
yy(k2)=betta;
betta=betta+1; % изменение угла поворота излучателя на 1 град
end
x=x+1; % изменение координаты X на 1
end
% ----------------------------figure(1);
130
grid on;
mesh(yy,xx,p11);
xlabel('Betta');
ylabel('X');
zlabel('Power');
% ----------------------------figure(2);
grid on;
mesh(yy,xx,p22);
xlabel('Betta');
ylabel('X');
zlabel('Lum');
% ----------------------------function a = ugol(x,r)
% вычисление производной и argtan
t = 1/sqrt ((r^2)/(x^2)-1);
if (x>=0)
a = - atand(t);
else
a= atand(t);
end
end
function a = nu( al, ga)
a=al + ga;
% if(a>90) a=90; % ограничить в пределах -90 < а < 90
% if(a<-90)a=-90; % исключить отрицательную освещенность
% end
% end
end
function a = p7(pmax,deg,deg05);
geg_pmax=0;
deg_09=deg05*0.9;
deg_05=deg05;
deg_01=80;
deg_00 = 90;
p_09=pmax*0.9;
131
p_05=pmax*0.3;
p_01=pmax*0.1;
p_00=0;
d=abs(deg);
x=[-90, -85, -80, -deg_05, -deg_09, geg_pmax, deg_09, deg_05, 80, 85, 90];
y=[p_00, p_00, p_01, p_05, p_09, pmax, p_09, p_05, p_01, p_00, p_00
];
PF=polyfit(x,y,7);
a = PF(1)*d.^7 + PF(2)*d.^6 +PF(3)*d.^5 + PF(4)*d.^4 +PF(5)*d.^3 +
PF(6)*d.^2 +PF(7)*d.^1 + PF(8);
a=0.88*a + 0.02*pmax;
end
function a = r(x0,x,y0,y)
a = sqrt((x-x0)^2 +(y-y0)^2);
end
function a = gama(x,x0,y,y0)
a=atand((x-x0)/(y-y0));
end
132
ПРИЛОЖЕНИЕ 2
unit Unit2;
interface
uses
Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms,
Dialogs, ExtCtrls, StdCtrls,ActiveX,DirectShow9, Direct3D9, DirectDraw, DirectSound, DXTypes,
VidGrab ,OpenGL, MMSystem, Math, Buttons;
type
TForm2 = class(TForm)
Button1: TButton; Button2: TButton; Image1: TImage;
Timer1: TTimer; Button3: TButton; Timer2: TTimer;
VideoGrabber1: TVideoGrabber;
GroupBox1: TGroupBox; ScrollBar1: TScrollBar;
GroupBox2: TGroupBox; ScrollBar2: TScrollBar;
Button4: TButton; Image2: TImage;
Timer3: TTimer; GroupBox3: TGroupBox;
procedure VideoGrabber1FrameOverlayUsingDC(Sender: TObject; Dc: HDC;
FrameNumber: Cardinal; FrameTime: Int64; FrameId: Integer);
procedure Button2Click(Sender: TObject);
procedure VideoGrabber1FrameCaptureCompleted(Sender: TObject;
FrameBitmap: TBitmap; BitmapWidth, BitmapHeight: Integer;
FrameNumber: Cardinal; FrameTime: Int64; DestType: TFrameCaptureDest;
FileName: string; Success: Boolean; FrameId: Integer);
procedure Timer1Timer(Sender: TObject);
procedure Button1Click(Sender: TObject);
procedure Button3Click(Sender: TObject);
procedure Timer2Timer(Sender: TObject);
procedure Timer3Timer(Sender: TObject);
procedure Edit4Change(Sender: TObject);
procedure FormClose(Sender: TObject; var Action: TCloseAction);
procedure Button7MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button7MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
133
procedure Button8MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button8MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button5MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button5MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button6MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
procedure Button6MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
private
DC : HDC;
hrc: HGLRC;
quadObj : GLUquadricObj;
public
{ Public declarations }
end;
type point = object
x,y:real;
procedure setPoint(xp,yp:real);
end;
var
Form2: TForm2;
mode1:integer;
B_map:array [1..1000,1..1000] of boolean;
R_map:array [1..1000,1..1000] of boolean;
a1,a2,b1,b2,c:point;
d,da,db:real;
x1,y1,x2,y2: real;
xm,ym,zm:real;
ym_m,ym_p,zm_m,zm_p,xm_m,xm_p:byte;
implementation
{$R *.dfm}
134
const eps = 0.000001;
function checkIntersection:shortint;
{returns
1 if there is one intersection point "c"
0 if chunks ar on parallel lines
-1 if there are no intersection points}
var d,da,db,ta,tb: real;
begin
d :=(a1.x-a2.x)*(b2.y-b1.y) - (a1.y-a2.y)*(b2.x-b1.x);
da:=(a1.x-b1.x)*(b2.y-b1.y) - (a1.y-b1.y)*(b2.x-b1.x);
db:=(a1.x-a2.x)*(a1.y-b1.y) - (a1.y-a2.y)*(a1.x-b1.x);
if (abs(d)<eps) then
checkIntersection := 0
else
begin
ta:=da/d;
tb:=db/d;
if (0<=ta) and (ta<=1)
and (0<=tb) and (tb<=1)
then
begin
c.setPoint(a1.x+ta*(a2.x-a1.x),a1.y+ta*(a2.y-a1.y));
checkIntersection := 1
end
else checkIntersection := -1;
end;
end;
//-----------------------------------------------------------------------------procedure pos_calc(
BitmapWidth, BitmapHeight: Integer;
var b_begin_x, b_begin_y, b_end_x, b_end_y :integer;
var r_begin_x, r_begin_y, r_end_x, r_end_y :integer//;
//var b_ang, r_ang :integer
);
var
135
i,j:integer;
obj:boolean;
obj_height,obj_width,l,r:integer;
begin
/////BLUE
obj:=true;
obj_height:=0;
i:=1;
j:=0;
repeat
i:=i+1;
obj:=false;
for j := 0 to BitmapWidth - 1 do
begin
obj:= B_map[i,j] or obj;
obj_height:=i;
end;
until (obj=false)and(i<BitmapHeight);
b_begin_y:=1;
b_end_y:=obj_height;
if (obj_height>1) then
begin
r:=0;
l:=0;
i:=0;
j:=0;
repeat
j:=j+1;
if (B_map[1,j]=true) then l:=j;
if (l>0) and (B_map[1,j]=false) then r:=j
until (r>0);
b_begin_x:=round( l+ ((r-l)/2) );
r:=0;
l:=0;
i:=0;
j:=0;
repeat
136
j:=j+1;
if (B_map[obj_height-1,j]=true) then l:=j;
if (l>0) and (B_map[obj_height-1,j]=false) then r:=j
until (r>0);
b_end_x:=round( l+ ((r-l)/2) );
end;
/////RED
obj:=true;
obj_height:=0;
i:=1;
j:=0;
repeat
i:=i+1;
obj:=false;
for j := 0 to BitmapWidth - 1 do
begin
obj:= R_map[i,j] or obj;
obj_height:=i;
end;
until (obj=false)and(i<BitmapHeight);
r_begin_y:=1;
r_end_y:=obj_height;
if (obj_height>1) then
begin
r:=0;
l:=0;
i:=0;
j:=0;
repeat
j:=j+1;
if (R_map[1,j]=true) then l:=j;
if (l>0) and (R_map[1,j]=false) then r:=j
until (r>0);
r_begin_x:=round( l+ ((r-l)/2) );
r:=0;
l:=0;
i:=0;
j:=0;
137
repeat
j:=j+1;
if (R_map[obj_height-1,j]=true) then l:=j;
if (l>0) and (R_map[obj_height-1,j]=false) then r:=j
until (r>0);
r_end_x:=round( l+ ((r-l)/2) );
end;
end;
procedure TForm2.Button1Click(Sender: TObject);
begin
VideoGrabber1.UseNearestVideoSize(320,240,true);
VideoGrabber1.StartPreview;
mode1:=1;
videograbber1.MotionDetector_Enabled:=true;
end;
procedure TForm2.Button2Click(Sender: TObject);
begin
mode1:=2;
end;
procedure TForm2.Button3Click(Sender: TObject);
begin
mode1:=3;
end;
procedure TForm2.Button5MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
xm_p:=1;
end;
procedure TForm2.Button5MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
xm_p:=0;
end;
procedure TForm2.Button6MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
xm_m:=1;
138
end;
procedure TForm2.Button6MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
xm_m:=0;
end;
procedure TForm2.Button7MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
ym_m:=1;
end;
procedure TForm2.Button7MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
ym_m:=0;
end;
procedure TForm2.Button8MouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
ym_p:=1;
end;
procedure TForm2.Button8MouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
ym_p:=0;
end;
procedure TForm2.Timer1Timer(Sender: TObject);
begin
VideoGrabber1.CaptureFrameTo (fc_TBitmap, '');
end;
procedure TForm2.Timer2Timer(Sender: TObject);
begin
VideoGrabber1.CaptureFrameTo (fc_TBitmap, '');
end;
procedure TForm2.Timer3Timer(Sender: TObject);
var
b_begin_x,b_begin_y,b_end_x,b_end_y:integer;
139
r_begin_x,r_begin_y,r_end_x,r_end_y:integer;
w,h:integer;
finger_begin_x, finger_begin_y, finger_begin_z:real;
finger_end_x, finger_end_y, finger_end_z:real;
led_y, led_x:real;
begin
w:=VideoGrabber1.Width;
h:=VideoGrabber1.Height;
pos_calc(
w,h,
b_begin_x,b_begin_y,b_end_x,b_end_y,
r_begin_x,r_begin_y,r_end_x,r_end_y
);
image2.Canvas.Pen.Color:=clBlack;
form2.image2.Canvas.Rectangle(0,0,w,h);
image2.Canvas.Pen.Color:=clBlue;
image2.Canvas.MoveTo(b_begin_x,0);
image2.Canvas.LineTo(b_end_x,b_end_y);
image2.Canvas.Pen.Color:=clRed;
image2.Canvas.MoveTo(r_begin_x,0);
image2.Canvas.LineTo(r_end_x,r_end_y);
//3D coordinates
end;
procedure TForm2.VideoGrabber1FrameCaptureCompleted(Sender: TObject;
FrameBitmap: TBitmap; BitmapWidth, BitmapHeight: Integer;
FrameNumber: Cardinal; FrameTime: Int64; DestType: TFrameCaptureDest;
FileName: string; Success: Boolean; FrameId: Integer);
type
TRGBTripleArray = ARRAY[Word] of TRGBTriple;
pRGBTripleArray = ^TRGBTripleArray;
var
i,j:integer;
bl,re,gr,gray:integer;
Row: pByteArray;
begin
gray:=scrollbar2.Position;
FrameBitmap.PixelFormat:=pf24bit;
if (mode1=2) then
140
begin
for i := 0 to BitmapHeight-1 do
begin
Row := pByteArray(FrameBitmap.ScanLine[i]);
for j := 1 to BitmapWidth do
begin
bl:= Row[j*3+2];
re:= Row[j*3];
gr:=Row[j*3+1];
if ( (bl>ScrollBar1.Position) and (bl>re) and (bl>gr) and ((blre)>gray)and((bl-gr)>gray) ) then
begin
Row[j*3+2]:=Row[j*3+2]*2;
Row[j*3+1]:=round(Row[j*3+1]/4);
Row[j*3]:=round(Row[j*3]/4);
end
else if ( (re>ScrollBar1.Position) and (re>bl) and (re>gr) and ((rebl)>gray)and ((re-gr)>gray) ) then
begin
Row[j*3+2]:=round(Row[j*3+2]/4);
Row[j*3+1]:=round(Row[j*3+1]/4);
Row[j*3]:=Row[j*3]*2;
end
else //FrameBitmap.Canvas.Pixels[i,j]:= rgb(
round(re/4),round(gr/4),round(bl/4));
begin
Row[j*3+2]:=round(Row[j*3+2]/4);
Row[j*3+1]:=round(Row[j*3+1]/4);
Row[j*3]:=round(Row[j*3]/4);
end
end;
end;
form2.Image1.Picture.Bitmap.Handle := FrameBitmap.Handle;
FrameBitmap.ReleaseHandle;
end;
if (mode1=3) then
begin
for i := 0 to BitmapHeight-1 do
141
begin
Row := pByteArray(FrameBitmap.ScanLine[i]);
for j := 1 to BitmapWidth - 1 do
begin
bl:= Row[j*3+2];
re:= Row[j*3];
gr:=Row[j*3+1];
if ( (bl>ScrollBar1.Position) and (bl>re) and (bl>gr) and ((blre)>gray)and((bl-gr)>gray) ) then
begin
Row[j*3+2]:=255;
Row[j*3+1]:=0;
Row[j*3]:=0;
R_map[i+1,j+1]:=true;
end
else if ( (re>ScrollBar1.Position) and (re>bl) and (re>gr) and ((rebl)>gray)
and ((re-gr)>gray) ) then
begin
Row[j*3+2]:=0;
Row[j*3+1]:=0;
Row[j*3]:=255;
B_map[i+1,j+1]:=true;
end
else
begin
Row[j*3+2]:=0;
Row[j*3+1]:=0;
Row[j*3]:=0;
R_map[i+1,j+1]:=false;
B_map[i+1,j+1]:=false;
end
end;
end;
form2.Image1.Picture.Bitmap.Handle := FrameBitmap.Handle;
FrameBitmap.ReleaseHandle;
142
if True then
end;
end;
procedure TForm2.VideoGrabber1FrameOverlayUsingDC(Sender: TObject;
Dc:
HDC;
FrameNumber: Cardinal; FrameTime: Int64; FrameId: Integer);
var
canv:TCanvas;
begin
canv:=TCanvas.Create;
canv.Handle:=Dc;
end;
procedure TForm2.FormClose(Sender: TObject; var Action: TCloseAction);
begin
wglMakeCurrent(0, 0);
wglDeleteContext(hrc);
ReleaseDC (Handle, DC);
DeleteDC (DC);
end;
end.
143
ПРИЛОЖЕНИЕ 3
# Created by Base SystemBuilderWizard for Xilinx EDK 14.7 Build
#EDK_P.20131013
# Wed Nov 22 15:35:38 2014
# Target Board: xilinx.com kc705 Rev C
# Family: kintex7
# Device: xc7k325t
# Package: ffg900
# Speed Grade: -2
PARAMETER VERSION = 2.1.0
…………………………..
PORT digital_video_camera_0_C_HS_pin = digital_video_camera_0_C_HS,
DIR = O
PORT digital_video_camera_0_C_PCLK_pin = digital_video_camera_0_C_PCLK, DIR = O
PORT digital_video_camera_0_C_SDK_pin = digital_video_camera_0_C_SDK,
DIR = O
PORT digital_video_camera_0_C_RST_pin = digital_video_camera_0_C_RST,
DIR = O
PORT digital_video_camera_0_C_MCLK_pin = digital_video_camera_0_C_MCLK, DIR = O
PORT digital_video_camera_0_CD_OUT_pin = digital_video_camera_0_CD_OUT, DIR = I, VEC = [7:0]
PORT digital_video_camera_0_C_SCK_pin = digital_video_camera_0_C_SCK,
DIR = O
PORT digital_video_camera_0_C_VS_pin = digital_video_camera_0_C_VS,
DIR = O
………………………...
BEGIN digital_video_camera
PARAMETER INSTANCE = digital_video_camera_0
PARAMETER HW_VER = 1.00.a
PARAMETER C_BASEADDR = 0x75000000
PARAMETER C_HIGHADDR = 0x7500ffff
BUS_INTERFACE S_AXI = axi4lite_0
PORT S_AXI_ACLK = clk_100_0000MHzPLLE0
PORT C_HS = digital_video_camera_0_C_HS
PORT C_PCLK = digital_video_camera_0_C_PCLK
144
PORT C_SDK = digital_video_camera_0_C_SDK
PORT C_RST = digital_video_camera_0_C_RST
PORT C_MCLK = digital_video_camera_0_C_MCLK
PORT CD_OUT = digital_video_camera_0_CD_OUT
PORT C_SCK = digital_video_camera_0_C_SCK
PORT C_VS = digital_video_camera_0_C_VS
END
145
ПРИЛОЖЕНИЕ 4(АКТЫ ИСПОЛЬЗОВАНИЯ РЕЗУЛЬТАТОВ РАБОТЫ)
146
“УТВЕРЖДАЮ”
Проректор МИЭТ
_______________Игнатова И.Г.
“____”________2016 г.
АКТ
об использовании в учебном процессе Национального исследовательского
университета «МИЭТ» результатов
диссертационной работы Литмановича Д.М.
«Оптико-волоконное устройство обработки видеоинформации для организации
управляющих интерфейсов автоматизированных систем»
Настоящим
подтверждается,
что
результаты
диссертационной
работы
Литмановича Д.М. «Оптико-волоконное устройство обработки видеоинформации для организации управляющих интерфейсов автоматизированных систем»
использовались в учебном процессе МИЭТ в читаемом на факультете ИТС на
кафедре «Микроэлектроника» курсе «Анализ и управление HDL - проектом
(HDL Designer)».
Зав. каф. «МЭ»,
д.т.н., проф.
_____________
147
Тимошенков С.П.
“УТВЕРЖДАЮ”
Проректор МИЭТ
_______________Игнатова И.Г.
“____”________2016 г.
АКТ
об использовании в учебном процессе Национального исследовательского
университета «МИЭТ» результатов
диссертационной работы Литмановича Д.М.
«Оптико-волоконное устройство обработки видеоинформации для организации
управляющих интерфейсов автоматизированных систем»
Настоящим подтверждается, что результаты диссертационной работы
Литмановича Д.М. «Оптико-волоконное устройство обработки видеоинформации для организации управляющих интерфейсов автоматизированных систем»
использовались в учебном процессе МИЭТ в читаемом на факультете ИТС на
кафедре «Микроэлектроника» курсе «Схемотехническое проектирование средствами DxDesigner»».
Зав. каф. «МЭ»,
д.т.н., проф.
_____________
148
Тимошенков С.П.
149
ПРИЛОЖЕНИЕ 5(ПАТЕНТЫ И ДИПЛОМЫ)
150
151
152
153
154