K - 1 - угату
реклама

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматизированных систем управления
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК
СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Лабораторный практикум по дисциплине
«Основы теории управления»
УФА 2009
Составители О.Д. Лянцев, Е.Е. Кузнецова
УДК 004:681.5(07)
ББК 32.973-018:32.965(я7)
Исследование характеристик систем автоматического управления:
лабораторный практикум по дисциплине «Основы теории управления» / Уфимск. гос. авиац. техн. ун-т; Сост. О.Д. Лянцев,
Е.Е. Кузнецова. – Уфа, 2009. – 26 с.
Содержатся основные сведения о временных и частотных характеристиках типовых динамических звеньев и о критериях устойчивости автоматических линейных непрерывных систем. Рассматриваются возможности их исследования с использованием автоматизированных средств моделирования на ПК – MATLAB, SIMULINK. Изучаются особенности практического использования алгебраических и частотных критериев устойчивости для анализа динамики линейных
САУ. Приведены перечень основных этапов работ по выполнению
лабораторных заданий, методика выполнения этих этапов, материалы
для оформления и защиты работы.
Методические указания разработаны с использованием учебной
и специальной литературы по теории автоматического управления с
применением типовых методических материалов.
Предназначены для подготовки дипломированных специалистов
по направлению 230100 – «Информатика и вычислительная техника»
специальности 230102 – «Автоматизированные системы обработки
информации и управления».
Табл.3. Ил.6. Библиогр.: 6 назв.
Рецензенты: канд. техн. наук, доц., Н.М. Дубинин,
д-р техн. наук, проф., Р.А. Мунасыпов
© Уфимский государственный авиационный технический
университет, 2008
2
Содержание
Лабораторная работа № 1
ДИНАМИЧЕСКИЕ ЗВЕНЬЯ И ИХ ХАРАКТЕРИСТИКИ
ВО ВРЕМЕННОЙ ОБЛАСТИ………………………………………………4
Лабораторная работа №2
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ДИНАМИЧЕСКИХ ЗВЕНЬЕВ………………………………………… 11
Лабораторная работа №3
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМ
С ОБРАТНОЙ СВЯЗЬЮ………………………………………………17
Список литературы…………………………………………………… 25
3
Лабораторная работа № 1
ДИНАМИЧЕСКИЕ ЗВЕНЬЯ И ИХ ХАРАКТЕРИСТИКИ
ВО ВРЕМЕННОЙ ОБЛАСТИ
1. Цель работы
Целью работы является изучение временных характеристик типовых динамических звеньев с использованием автоматизированных
средств моделирования на ПК – MATLAB, SIMULINK.
2. Теоретическая часть
Рассматривается система автоматического управления (САУ),
описываемая линейным дифференциальным уравнением вида:
d n y (t )
d n1 y (t )
dy(t )
a
a
a0 y (t )
n
1
1
dt
dt n
dt n1
d mu (t )
d m1u (t )
du(t )
bm
b
b
b0u (t ) ,
m
1
1
dt
dt m
dt m1
an
(1 )
где u(t) – входной процесс; y(t) – выходной процесс ai , bi , – постоянные коэффициенты; п, т (п >= т) – постоянные числа.
Если ввести обозначение р для оператора дифференцирования
d
p dt , то можно записать (1) в операторной форме:
(an p n an1 p n1 a1 p a0 ) y (t )
(bm p m bm1 p m1 b1 p b0 )u (t ) ,
(2)
откуда получается:
y(t ) B( p)
W ( p),
u (t ) A( p)
где А(р) и В(р) – полиномы из формулы (2).
Выражение (2) по виду совпадает с определением передаточной
функции (ПФ) как отношения преобразования по Лапласу выходной
переменной к преобразованию по Лапласу входной переменной при
нулевых начальных условиях:
4
y ( s ) B( s )
W ( s),
u ( s) A( s)
(3)
где s – комплексная переменная.
Комплексные числа, являющиеся корнями многочлена B(s),
называются нулями передаточной функции, а корни многочлена А(s) –
полюсами.
Описание типовых динамических звеньев приведено в таблице 1.
Таблица 1
Типовые динамические звенья
Название звена
Передаточная функция звена
K
s
1
Интегрирующее
W (s)
2
Дифференцирующее
W (s) Ks
3
Усилительное
(безынерционное)
W ( s) K
4
Апериодическое 1-го
порядка (инерционное)
5
Апериодическое 2-го
порядка (все корни вещественные)
W ( s)
6
Колебательное *
W ( s)
W ( s)
5
T22 s 2
K
Ts 1
K
; T1 2T2
T1s 1
K
; T1 2T2
T22 s 2 T1s 1
Продолжение таблицы 1
7
8
9
Консервативное
W (s)
Интегрирующее
с запаздыванием
(реальное
интегрирующее)
Дифференцирующее
с запаздыванием
(реальное дифференцирующее)
W ( s)
K
Ts2 1
K
s(Ts 1)
W ( s)
Ks
Ts 1
10 Форсирующее
W (s) K (Ts 1)
11 Изодромное
W ( s)
K (Ts 1)
s
* часто используется описание колебательного звена в виде:
W ( s)
T1
K
;
T
T
,
.
2
2T2
T 2 s 2 2Ts 1
Временные характеристики динамического звена представляют
собой зависимость выходного сигнала системы от времени при подаче
на ее вход некоторого типового воздействия. Обычно выполняется
анализ выхода системы на единичный скачок (функция Хевисайда) и
импульсную функцию (функция Дирака или δ-функция).
Единичный скачок 1(t) определяется условиями:
0 при t 0,
1(t )
1 при t 0.
Реакция САУ на единичный скачок называется переходной
6
функцией системы и обозначается h(t). При неединичном ступенчатом
воздействии g(t)=N·1(t), где N = const, в соответствии с принципом суперпозиции выходная реакция системы будет
y (t ) Nh(t ).
Импульсная функция δ(t) определяется условиями:
при t 0,
0 при t 0.
(t )
Очевидно:
(t ) 1(t ).
Реакция САУ на импульсную функцию называется импульсной
переходной функцией системы (функцией веса) и обозначается w(t).
Импульсная и переходная функции системы связаны соотношением
t
h(t ) w( ) d .
0
2.1. Моделирование передаточных функций в MatLab
В пакете MatLab имеется два основных варианта для исследования передаточных функций и моделирования САУ:
- использование команд пакета расширения Control System
Toolbox;
- использование пакета Simulink.
Control System Toolbox предназначен для работы с LTI-моделями
(Linear Time Invariant Models – линейные модели с постоянными параметрами) систем управления.
Команда, создающая LTI-систему с одним входом и одним выходом в виде передаточной функции, имеет следующий синтаксис:
tf ([bm , bm1,, b1, b0 ],[an , an1,, a1, a0 ]),
где bm , bm1,, b1, b0 и an , an1,, a1, a0 – значения коэффициентов полиномов В и А в (3).
Например, если требуется описать ПФ вида
7
W
s 1
2 s 8s 5
2
и узнать значения ее нулей и полюсов, то нужно ввести в окне команд
MatLab следующие команды:
>> w=tf([1 1],[2 8 5])
>> zero(w)
>> pole(w)
Исследовать реакцию LTI-модели на типовые входные воздействия можно с помощью команд
>> step(w)
>> impulse(w)
Можно получить на одном графике реакцию сразу нескольких
динамических звеньев, если использовать команды вида:
>> step(w,w1,w2)
>> impulse(w, w1 ,w2)
В приведенных примерах время моделирования выбирается автоматически. При необходимости его можно явно указать в команде
>>step(w, w1, w2,t),
где t - время моделирования в секундах.
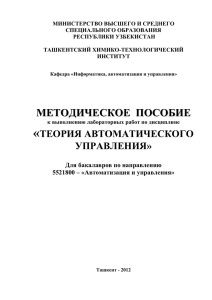
Рис. 1. Исследование реакции колебательного звена
На рис. 1 показан пример моделирования динамики колебательного звена при различных параметрах:
8
>> w=tf([1],[2 0.3 1]);
>> w1=tf([1],[2 0.5 1]);
>> w2=tf([1],[2 0.1 1]);
>> step(w,w1,w2,50).
В Simulink ПФ можно описать с помощью блока Transfer Fcn в
разделе библиотеки Continuous. Для подачи типовых воздействий
надо использовать блок Step из раздела Sources. Импульсную переходную характеристику звена можно получить, подавая на вход импульс маленькой длительности и большой амплитуды (приближение
δ-функции) при нулевых начальных условиях.
3. Порядок выполнения работы
1. Получить у преподавателя вариант выполнения работы.
2. С помощью пакета MatLab построить реакцию каждого типового звена с параметрами своего варианта (см. таблицу 2) на ступенчатое и импульсное входное воздействие. Определить влияние коэффициентов, входящих в описание каждого звена на параметры переходного процесса.
Таблица 2
№
Апериод Апериодич. звено 2 Интегр
звено
пор. (колеб. звено) звено
K
T
[с]
K
T
[с]
1
2
0,2
1
0,2
2
3
0,3
2
0,3
3
4
0,4
3
0,4
4
5
0,5
4
0,5
5
6
0,6
5
0,6
6
7
0,7
6
0,7
7
8
0,8
7
0,8
8
10
1,0
8
1,0
ξ
2,0
(0,2)
1,5
(0,15)
2,5
(0,25)
1,6
(0,3)
2,8
(0,2)
2,2
(0,08)
2,1
(0,07)
3,0
(0,1)
Изодр.
звено
Реальное
диф. звено
Инерц.-форс
Звено
K1
K2
K
τ
[с]
K
T0
[с]
T
[с]
2
2
0,5
2
0,4
2
2
0,8
3
3
1
3
0,3
3
3
1,2
4
4
0,8
4
0,5
4
4
1,5
5
5
2
5
1,0
5
5
2,0
6
6
3
6
0,8
6
6
2,0
7
7
3,5
7
1,0
7
7
2,0
8
8
1
8
0,9
8
8
3,0
10
10
2,0
10
2,0
1,0
10
4,0
K
4. Требования к отчету
Отчет по лабораторной работе должен содержать:
а) титульный лист;
б) передаточные функции и схемы моделирования исследуемых
9
звеньев;
в) экспериментально полученные характеристики при вариации параметров каждого звена;
г) выводы, обобщающие проделанные эксперименты по каждому звену.
д) ответы на контрольные вопросы.
5. Контрольные вопросы
1. Что называется переходной и импульсной (весовой) функциями? Какова связь между ними?
2. Как, пользуясь временными характеристиками, определить
параметры (коэффициенты передаточной функции) звена? Пояснить
на конкретных примерах.
10
Лабораторная работа №2
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
1. Цель работы
Целью работы является изучение частотных характеристик типовых динамических звеньев с использованием автоматизированных
средств моделирования на ПК – MATLAB, SIMULINK.
2. Теоретическая часть
Сущность метода частотных характеристик заключается в том,
что на вход исследуемой системы подается гармонический сигнал (синусоидальные колебания) в широком диапазоне частот. Реакция системы при разных частотах позволяет судить о ее динамических свойствах.
Пусть входной сигнал системы имеет амплитуду а и частоту ω, т. е.
описывается формулой
x a sin(t ).
Выходной сигнал будет иметь амплитуду А1 и отличаться от входного по фазе на величину ψ (фазовый сдвиг):
y A1 sin( t ).
Таким образом, можно рассчитать усиление по амплитуде
A
A1
.
a
Для каждой частоты входного сигнала ω будут свои А и ψ.
Изменяя со в широком диапазоне, можно получить зависимость
А(ω) – амплитудную частотную характеристику (АЧХ) и ψ(ω) – фазовую частотную характеристику (ФЧХ).
Главное достоинство метода частотных характеристик заключается в том, что АЧХ и ФЧХ объекта могут быть получены экспериментально. Для этого необходимо иметь генератор гармонических
11
колебаний, который подключается к входу объекта, и измерительную аппаратуру для измерения амплитуды и фазового сдвига колебаний на выходе объекта.
Частотные характеристики САУ могут быть получены по ее ПФ
W(s). Для суждения о реакции звена на синусоидальный сигнал достаточно исследовать его реакцию на гармонический сигнал вида
x ( j ) e j t .
Тогда выходной сигнал определяется по соотношению
y ( j ) A( )e j (t ( )) ,
и частотная ПФ получается равной
W ( j )
y( j )
A( )e j ( ) .
x( j )
Формально для получения частотной ПФ надо сделать в W(s)
подстановку s = jω, и тогда, полученная W(jω) является комплексным
выражением, которое можно представить в виде:
W ( j )
a1 ( ) jb1 ( )
.
a2 ( ) jb2 ( )
Для нахождения вещественной и мнимой частей частотной передаточной функции необходимо умножить числитель и знаменатель
на сопряженную знаменателю величину, а затем провести разделение:
W ( j )
a1 ( ) jb1 ( ) (a1 ( ) jb1 ( ))( a2 ( ) jb2 ( ))
a2 ( ) jb2 ( ) (a2 ( ) jb2 ( ))( a2 ( ) jb2 ( ))
a1 ( )a2 ( ) b1 ( )b2 ( )
a ( )b1 ( ) a1 ( )b2 ( )
j 2
2
2
a2 ( ) b2 ( )
a22 ( ) b22 ( )
U ( ) jV ( ) A( )e j ( ) ,
12
где
A( ) W ( j ) U ( ) V ( )
2
2
a12 b12
a22 b22
,
b1
b2
V ( )
arctg
arctg
a
a .
U ( )
1
2
( ) arg(W ( j )) arctg
Графики функции U ( ) и V ( ) называют соответственно вещественной и мнимой частотной характеристиками.
В практических расчетах удобно применять графики частотных
характеристик, построенных в логарифмическом масштабе – логарифмические частотные характеристики (ЛЧХ).
Логарифмическая амплитудная частотная характеристика
(ЛАЧХ) определяется следующим выражением:
L( ) 20 lg A( ).
Логарифмической фазовой частотной характеристикой
(ЛФЧХ) называется график зависимости ( ) , построенный в логарифмическом масштабе частот.
Единицей L(ω) является децибел (дБ), а единицей логарифма частоты – декада. Декадой называют интервал частот, на котором частота изменяется в 10 раз. При изменении частоты в 10 раз говорят, что
она изменилась на одну декаду. Ось ординат при построении ЛЧХ проводят через произвольную точку, а не через точку ω = 0. Частоте ω = 0
соответствует бесконечно удаленная точка: lgω → – ∞ при ω → 0.
Основное преимущество использования ЛЧХ заключается в том,
что приближенные (асимптотические) ЛАЧХ типовых динамических
звеньев изображаются отрезками прямых.
Пример. Построим ЛЧХ апериодического звена первого порядка.
Передаточная функция звена
W ( s)
k
.
Ts 1
Частотная передаточная функция
13
W ( j )
U
k
Tj 1
k (1 Tj )
,
(T ) 2 1
k
kT
,
V
.
(T ) 2 1
(T )2 1
Следовательно, АЧХ описывается формулой
A( )
k
(T ) 2 1
,
ФЧХ строится по формуле
( ) arctg (T ).
ЛАЧХ апериодического звена 1-го порядка
L( ) 20 lg k 20 lg (T ) 2 1.
По этой формуле можно построить две асимптоты – прямые, к
которым стремится ЛАЧХ при ω → 0 и при ω → ∞. Так, при ω → 0 второе
слагаемое близко к нулю, и этот участок ЛАЧХ представляет собой
горизонтальную прямую
L( ) 20 lg k.
При ω → ∞ получаем наклонную прямую
L( ) 20 lg (T ) 2 1 .
Для определения наклона этой прямой можно рассмотреть границы декады:
1
10
и .
T
T
Изменение ЛАЧХ между этими точками:
14
2
2
10
1
L( ) 20 lg T 1 20 lg T 1 20(дБ / дек).
T
T
ЛЧХ часто называют диаграммами Боде.
2.1. Построение частотных характеристик в MatLab
В пакете MatLab ЛЧХ объекта, заданного с помощью ПФ, можно
получить командой bode.
Пример:
>>w=tf([1 2],[3 4 5])
>> bode(w)
Для нескольких вариантов передаточной функции можно использовать вариант команды вида:
>> bode(w,w1,w2)
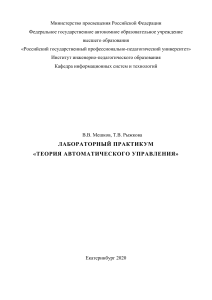
Например, построим диаграмму Боде при различных параметрах
колебательного звена (рис. 1):
>> w=tf([1],[2 0.3 1 ]);
>> w1=tf([1],[2 0.5 1]);
>> w2=tf([1],[2 0.1 1]);
>> bode(w,w1,w2)
Рис 1. ЛЧХ колебательного звена
15
3. Порядок выполнения работы
1. Получить у преподавателя номер своего варианта.
2. С помощью MatLab построить ЛЧХ каждого типового звена
для своего варианта (см. табл. лабораторной работы № 1).
3. Определить влияние коэффициентов, входящих в описание
каждого звена, на параметры ЛАЧХ и ЛФЧХ, в том числе:
- как меняется ширина асимптотических участков ЛАЧХ и ЛФЧХ;
- как меняется положение точек пересечения осей ЛАЧХ.
4. Требования к отчету
Отчет по лабораторной работе должен содержать:
а) титульный лист;
б) краткие теоретические сведения;
в) передаточные функции и схемы моделирования исследуемых
звеньев;
г) экспериментально полученные характеристики при вариации
параметров каждого звена;
д) выводы, обобщающие проделанные эксперименты по каждому звену.
ж) ответы на контрольные вопросы.
5. Контрольные вопросы
1. Как, пользуясь частотными характеристиками, определить параметры (коэффициенты передаточной функции) звена? Пояснить на конкретных примерах.
2. Указать особенности построения ЛАХ и ЛФХ динамических
звеньев. Что понимается под асимптотической ЛАХ звена?
3. Как осуществляется построение АФХ динамического звена?
16
Лабораторная работа №3
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМ
С ОБРАТНОЙ СВЯЗЬЮ
1. Цель работы
Изучение особенностей практического использования алгебраических и частотных критериев устойчивости для анализа динамики
линейных САУ.
2. Теоретическая часть
Устойчивость САУ является одним из основных условий ее работоспособности и включает требование затухания во времени переходных процессов.
Система является устойчивой, если при ограниченном входном
сигнале её выходной сигнал также является ограниченным. Если
система устойчива, то она противостоит внешним воздействиям, а
выведенная из состояния равновесия возвращается снова к нему.
Система с расходящимся переходным процессом будет неустойчивой и
неработоспособной.
Необходимое и достаточное условие устойчивости заключается в
том, чтобы все корни характеристического уравнения (полюсы передаточной функции системы) имели отрицательные вещественные части. Иначе говоря, условием устойчивости системы является расположение всех полюсов в левой комплексной полуплоскости. Тогда все
полюсы будут давать затухающую реакцию.
Выше сформулированное условие устойчивости справедливо как
для линейных, так и для линеаризованных систем. Однако в случае
нулевых или чисто мнимых корней характеристического уравнения
вопрос об устойчивости линеаризованной системы может быть решен только на основании исследования ее нелинейных уравнений.
В конце XIX и первой половине XX в. задача вычисления корней
характеристического уравнения высокого порядка вызывала большие проблемы. Поэтому были предложены несколько косвенных
методов оценки устойчивости, позволяющих обойтись без вычисления корней – по значениям коэффициентов характеристического уравнения.
Критерии устойчивости разделяют на алгебраические и частот-
17
ные. В частности, к алгебраическим критериям относится критерий
Гурвица, к частотным критерия – критерий Найквиста.
Критерий Гурвица является алгебраическим критерием и применяется к коэффициентам характеристического уравнения замкнутой
системы.
Пусть имеется характеристическое уравнение замкнутой системы:
an p n an1 p n1 a1 p a0 0.
Из коэффициентов характеристического уравнения составляют
матрицу по правилу:
1. По диагонали записываются коэффициенты от an1 до a0 .
2. Каждая строка дополняется коэффициентами с возрастающими индексами слева направо так, чтобы чередовались строки с нечетными и четными индексами.
3. В случае отсутствия индекса, а также, если он меньше 0 или
больше п, на его место пишется 0.
Таким образом, матрица Гурвица приобретает следующий вид:
Критерий устойчивости формулируется так:
Чтобы система была устойчивой, необходимо и достаточно, чтобы при a n 0 были положительными все п диагональных определителей, получаемых из матрицы Гурвица.
Первые три определителя матрицы Гурвица имеют следующий
вид:
18
Таким образом, критерий Гурвица позволяет судить об абсолютной устойчивости, но он не дает возможности оценивать относительную устойчивость по корням характеристического уравнения.
Частотный критерий устойчивости Найквиста анализирует
АФЧХ разомкнутой системы.
Пусть имеется ПФ разомкнутой системы W(jω).
Для нахождения вещественной и мнимой части частотной ПФ
нужно освободиться от мнимости в знаменателе путем умножения
числителя и знаменателя на комплексную величину, сопряженную
знаменателю, а затем выполнить разделение на вещественную и мнимую части. Передаточная функция приобретает вид
W ( j ) P( ) Q( ).
Задаваясь различными значениями частоты, можно найти множество пар: { P(1 ); jQ (1 ) }, { P(2 ); jQ (2 ) }, ..., { P(n ); jQ (n ) }. Затем
по этим парам строится АФЧХ на комплексной плоскости.
Основные свойства АФЧХ разомкнутой системы:
1. Если разомкнутая система не имеет интегрирующих звеньев,
то при ω = 0 ее АФЧХ начинается на вещественной оси в точке
Р(ω)=К (где К – коэффициент усиления разомкнутой системы). Заканчивается АФЧХ в начале координат при ω → ∞ (рис. 1, а).
2. Если разомкнутая система имеет одно интегрирующее звено, то
ее АФЧХ начинается при ω = 0 в бесконечности на отрицательной мнимой полуоси, а заканчивается в начале координат при ω → ∞ (рис. 1, б).
Рис. 1. АФЧХ разомкнутой системы
Критерий устойчивости Найквиста формулируется так:
1. Если разомкнутая система устойчива или находится на границе устойчивости, то для того чтобы замкнутая система была
устойчива, необходимо и достаточно, чтобы АФЧХ разомкнутой си19
стемы при изменении частоты ω от 0 до ∞ не охватывала точку с координатами (-1, j0).
2. Если разомкнутая система неустойчива, а ее передаточная
функция имеет т полюсов справа от мнимой оси на комплексной
плоскости, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты
ω от -∞ до +∞ охватывала т раз точку с координатами (-1, j0).
При использовании этого критерия нужно учитывать две особенности:
1. Если разомкнутая система находится на границе устойчивости, то ее АФЧХ уходит в бесконечность. Для проверки критерия Найквиста нужно мысленно соединить конец АФЧХ дугой бесконечно
большого радиуса с положительной вещественной полуосью.
2. На практике АФЧХ может строиться только для положительных частот (0 < ω < +∞). При применении критерия Найквиста считается, что ветвь АФЧХ для отрицательных частот симметрична относительно вещественной оси.
Физический смысл критерия устойчивости Найквиста заключается в том, что система будет неустойчива, если фаза выходного сигнала противоположна фазе входного сигнала, а коэффициент усиления больше 1. Поэтому для анализа устойчивости можно использовать не АФЧХ, а ЛАХ системы (для минимально-фазовых систем).
Система устойчива, если на частоте среза значение фазы не превышает -π. Соответственно для устойчивой системы можно рассматривать на ЛФЧХ запас устойчивости по фазе – расстояние от значения
фазы на частоте среза до уровня -π, и запас устойчивости по амплитуде – расстояние от оси частот ЛАЧХ до значения усиления на частоте, где фаза становится равной -π.
2.1. Исследование устойчивости САУ в MatLab
Для проверки устойчивости САУ по Гурвицу постройте матрицу
Гурвица и найдите ее детерминант (функция det). Затем, последовательно уменьшая размер матрицы, найдите значения всех диагональных детерминантов. Пример:
>> А=[1 14 18; 2 5 2; 3 4 3]
А=
1 14 18
2 5 2
20
3 4 3
>> det(A)
ans = -119
>> А1=А(1:2, 1:2)
А1 =
1 14
25
>> det(A1)
ans = -23
Для проверки устойчивости САУ по Найквисту сначала нужно
выяснить, является ли устойчивой разомкнутая система.
Пример. Пусть дана передаточная функция разомкнутой системы
W
2 p 1
.
2 p 4 3 p3 2 p 2 3 p 1
Рассмотрим реакцию на скачок:
>> w=tf([2 1],[2 3 2 3 1])
>> step(w)
График переходного процесса показан на рис. 2.
Рис. 2. Переходная реакция
21
Разомкнутая система неустойчива, и, согласно критерию Найквиста, надо, чтобы АФЧХ разомкнутой системы охватывала точку (-1, j0)
столько раз, сколько полюсов имеется справа от мнимой оси. Для построения АФЧХ достаточно вызвать команду nyquist
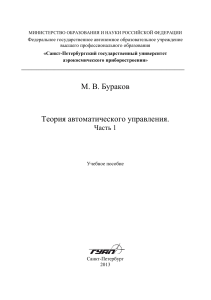
>> nyquist(w)
Диаграмма Найквиста показана на рис. 3.
Рис. 3. Диаграмма Найквиста для неустойчивой системы.
Как показывает рис.3, АФЧХ ни разу не охватывает точку (-1,
j0), поэтому замкнутая система будет неустойчивой. Частотный критерий Найквиста можно использовать и в том случае, когда рассматривается не АФЧХ, а ЛАЧХ разомкнутой системы: замкнутая минимально-фазовая система устойчива, если при достижении ЛФЧХ значения -π ЛАЧХ будет отрицательной.
Используя ЛАЧХ и ЛФЧХ, можно оценить запасы устойчивости
системы по амплитуде и по фазе с помощью команды
>> margin(w)
Пример:
>> w=tf([10],[2 2 3 1]);
>> margin(w)
Соответствующий график показан на рис. 4.
22
Рис. 4. Определение запасов устойчивости по амплитуде и по фазе
3. Порядок выполнения работы
Выполнить исследование устойчивости замкнутой САУ по заданной передаточной функции разомкнутой системы. Варианты заданий
приведены в таблице.
4. Требования к отчету
Отчет по лабораторной работе должен содержать:
а) титульный лист;
- краткие теоретические сведения;
- переходную функцию разомкнутой системы;
- расчет передаточной функции замкнутой системы;
- расчетные выражения для обоснования устойчивости замкнутой
системы по алгебраическому критерию Гурвица;
- годограф Найквиста разомкнутой системы, на основании которого
делается вывод об устойчивости замкнутой системы;
- переходную функцию замкнутой системы;
- проверку полученных результатов путем компьютерного моделирования переходных процессов разомкнутой и замкнутой системы в
MatLab Simulink;
23
- выводы по всем полученным результатам.
Таблица 1
5. Контрольные вопросы
1. Как связана устойчивость линейной САУ с видом составляющих ее
свободного движения?
24
2. Зависит ли устойчивость линейных САУ от амплитуды задающих
воздействий или возмущений?
3. Сформулируйте критерий устойчивости Гурвица, укажите на необходимое условие устойчивости линейных САУ, вытекающее из
этого критерия?
4. Сформулируйте критерий Найквиста для случая САУ, устойчивых
в разомкнутом состоянии, а также для астатических САУ. Что такое
«запасы устойчивости по фазе и по амплитуде»?
5. Что называется структурной устойчивостью?
Список литературы
1. Востриков А.С. Теория автоматического регулирования: Учеб.
пособие для вузов /А.С. Востриков, Г.А. Французова. – М.: Высш.
шк., 2006.
2. Савин М.М. Теория автоматического управления: Учебное пособие. Ростов н/Д: Феникс, 2007.
3. Бесекерский В.А., Попов Е.П. Теория систем автоматического
управления. Учебное пособие для вузов. СПб: Профессия, 2004.
4. Дорф Р., Бишоп Р. Современные системы управления. – М.: Лаборатория Базовых Знаний, 2002.
5. Филлипс Ч., Харбор Р. Системы управления с обратной связью. –
М.: Лаборатория Базовых Знаний, 2001.
6. Методы классической и современной теории управления. Учебник в 3-х томах. Издат. МГТУ им. Н.Э. Баумана, 2000.
25
Составители: Лянцев Олег Дмитриевич
Кузнецова Елена Евгеньевна
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК
СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Лабораторный практикум по дисциплине
«Основы теории управления»
Подписано в печать 12.08.2008. Формат 60х84 1/16.
Бумага офсетная. Печать плоская. Гарнитура Таймс.
Усл. печ. л.1,7. Усл. кр. - отт. 1,7. Уч. -изд. л. 1,6.
Тираж 100 экз. Заказ № .
ГОУ ВПО Уфимский государственный авиационный
технический университет
Центр оперативной полиграфии УГАТУ
450000, Уфа-центр, ул. К. Маркса, 12
26