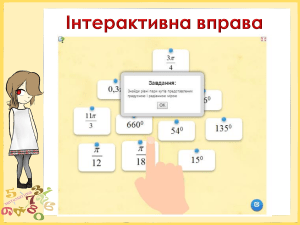
РЕЗОНАНСНІ КОЛИВАННЯ ПРУЖНОГО ГРАВІТАЦІЙНОГО МАЯТНИКА Роботу виконала: Головацька Яна Володимирівна, Учениця 9 класу Чернівецького Міського ліцею №1 математичного та Економічного профілів Науковий керівник: Пшенічка Пауль Францович, Вчитель фізики Чернівецького Міського ліцею №1 математичного та Економічного профілів МЕТА ТА АКТУАЛЬНІСТЬ 1 Мета: Актуальність: - Дослідити особливості коливань пружного гравітаційного маятника, який здійснює одночасно зв’язані коливання як пружинний та математичний маятники при резонансному співвідношенні частот. - Наочний приклад нелінійно зв’язаних коливних систем. - Математична подібність до інших складних коливань, які часто зустрічаються у фізичних задачах. Наприклад, нелінійним зв’язком поздовжніх та поперечних коливань атомів пояснюються резонанс Фермі в ІЧ спектрі молекул CO2, коливання в електромагнітних контурах з нелінійним зв’язком, рух штучних та природних супутників та інші. - Наглядно-графічна інтерпретація розв’язків може використовуватись при вивченні явищ детермінованого хаосу. - Визначити вплив початкових умов на утворення стабільних періодичних мод коливань. - Дослідити процес передачі енергії з однієї підсистеми в іншу. 2 ОГЛЯД ЛІТЕРАТУРИ Vitt A. Oscillations of an elastic pendulum as an example of the oscillations of two parametrically coupled linear systems/ A.Vitt, G. Gorelik// Zhurnal Tekhnicheskoy Fiziki. – 1933. – V.3. - №2-3, P. 294-307. Olsson M. Why does a mass on a spring sometimes misbehave?/ M. Olsson// American Journal of Physics. – 1976. – V.44. - №12, P. 1211-1212. Anisin B. On the linear theory of the elastic pendulum/ B. Anisin, D. Davidovic, V. Babovic// European Journal of Physics. – 1993– V.14, P. 132-135. Christensen J. An improved calculation of the mass for the resonant spring pendulum/ J. Christensen//American Journal of Physics. – 2004. – V.72. - №6, P. 818-828. Lai H. M. On recurrence phenomenon of a resonant spring pendulum/ H. M. Lai// American Journal of Physics. – 1984. – V.52. - №3, P. 219-223. +отримана система рівнянь Лагранжа для цієї коливної системи +виконано дослідження в наближеннях малих коливань +передбачено існування резонансних коливань з обміном енергією між підсистемами Рис. 1 +у наближенні малих коливань отримано частоти двох стабільних мод коливання(див рис. 1) +Отримано траєкторії руху(див рис.2) центра мас системи, значно спростивши рівняння руху для малих коливань +у різних наближеннях проведені аналітичні дослідження розв’язків задачі Рис. 2 3 ОГЛЯД ЛІТЕРАТУРИ Carretero-Gonzalez R. Regular and chaotic behavior in an extensible pendulum/ R. Carretero-Gonzalez, N. H. Nunez-Yepez, A. L. Salas-Brito// European Journal of Physics. – 1994. – V.15, P.139148. +виконано числове моделювання +дослідження існування хаотичного та періодичного характерів руху системи(рис.3) Рис. 3 Періодичні та хаотичні коливання маятника ОГЛЯД ЛІТЕРАТУРИ 4 Sousa M. C. Energy distribution in intrinsically coupled systems: The spring pendulum paradigm/ M. C.Sousa, F. A. Marcus, I. L. Caldas, R. L. Viana // Physica A. – 2018. V.509, P. 1110-1119. Алдошин Г.Т. Механическая модель колебательного спектра углекислого газа/ Г.Т. Алдошин, С. П. Яковлев// Журнал технической физики. – 2016. – T.86. -№12. C.25-32 +виконане дослідження без обмежень на величину початкових амплітуд +встановлено, що на поведінку системи впливає енергія, яку вона отримує(рис.4) +виконано числове моделювання коливань в триатомній молекулі СО2 (рис.5) а) б) Рис. 4 Числові залежності координат центру мас коливної системи при а) малих б) великих збудженнях б) а) Рис.5 а) результат числового моделювання коливань атомів в молекулі СО2 б) схема коливань атомів 5 ПОБУДОВА РІВНЯННЯ РУХУ Рівняння Лагранжа другого роду: d L L dt r r 0 Отримана система: d L L 0 dt Кінетична енергія: m r 2 m r 2 2 T 2 2 d dt L q j L 0 (1) q j (2) , де L- функція Лагранжа: L=T-U 2 Потенціальна k ( r l ) 0 (3) U m g r cos (4) енергія: 2 m r m r 2 k (r l0 ) mg cos 0 r 2 r g sin 0 (5) Рис. 6 Узагальнені координати ДОСЛІДЖЕННЯ КОЖНОЇ З ПІДСИСТЕМ МАЯТНИКА Залежність довжини маятника від часу: Після підстановки (1) в систему : r (t ) l0 m g / k A cos ( пр t f 0 ) 6 (1) [l0 g / пр2 A cos(пр t 0 )](t ) 2 A пр sin(пр t 0 ) (t ) g sin( (t )) 0 (2) а) б) в) г) Рис.7 Залежність кута відхилення маятника від часу при співвідношені частот пружинної підсистеми до гравітаційної як: а) 1 до 2 б) 1 до 1 в) 1 до 1.97 г) 1 до 2.03 7 ДОСЛІДЖЕННЯ КОЖНОЇ З ПІДСИСТЕМ МАЯТНИКА (t ) 0 cos ( g t f 0 ) (1) r(t ) sin ( t f ) r (t ) (r (t ) l ) g cos cos ( t f ) 0 (2) Залежність кута відхилу маятника від часу: Після підстановки (1) в систему : 2 а) б) в) г) 2 0 2 g 0 2 пр 0 0 g 0 Рис.8 Залежність розтягу пружини від часу при співвідношенні частот пружинної підсистеми до гравітаційної як: а) 1 до 2 б) 1 до 1 в) 1 до 1.97 г) 1 до 2.03 в) Величина енергії якою обмінюються підсистеми: Початкова енергія (1) гравітаційної підсистеми: E E0(1) 2E0( 2 ) (3) 8 Початкова енергія пружинної підсистеми: E 0(1) mg[1 cos (0)] r (0) E0( 2 ) k[r (0)]2 / 2 а) (2) д) б) г) е) Рис.9 Залежність координат маятника від часу ЗАЛЕЖНІСТЬ ПЕРІОДУ ОБМІНУ ЕНЕРГІЄЮ Рис.10 Залежність періоду обміну енергією між підсистеми від початкової енергії: а) гравітаційної підсистеми; б) пружинної підсистеми. а) б) 9 МОДИ БЕЗ ОБМІНУ ЕНЕРГІЄЮ Періоди мод T T0 (1 3 2r0 /(16r0 )) коливань системи а) T T0 (1 3 2r0 /(16r0 )) б) Рис. 11 Дві стабільні періодичні моди без обміну енергією між підсистемами при початковому: а) стисненні пружини; б) розтягу пружини. 10 КАРТА МОД КОЛИВАНЬ 11 Рис. 12 Розміщення початкових умов, при яких виникають певні періодичні стабільні моди коливань на площині ЕВОЛЮЦІЯ МОДИ 4А Рис. 13 Еволюція моди 4а. 12 ЕВОЛЮЦІЯ МОДИ 4А Рис. 14 Еволюція моди 4а. 13 ЕВОЛЮЦІЯ МОДИ 4А Рис. 15 Еволюція моди 4а. 14 ЕВОЛЮЦІЯ МОДИ 4А Рис. 16 Еволюція моди 4а. 15 ЕВОЛЮЦІЯ МОДИ 4А Рис. 17 Еволюція моди 4а. Момент переходу у одну з базових мод коливань. 16 ЕВОЛЮЦІЯ МОДИ 4А Рис. 18 Еволюція моди 4а. 17 ЕВОЛЮЦІЯ МОДИ 4А Рис. 19 Еволюція моди 4а. 18 ЕВОЛЮЦІЯ МОДИ 4А Рис. 20 Еволюція моди 4а. 19 ЕВОЛЮЦІЯ МОДИ 4А Рис. 21 Еволюція моди 4а. 20 21 ЕКСПЕРИМЕНТАЛЬНЕ ДОСЛІДЖЕННЯ (1) F / S El / l0 ⇒ (2) F ESl / l0 ES (4) Tg / Tпр 2 ⇒ k l /(m g ) 4 (1) ⇒ k / l0 (3) (5) (7) (6) ⇒ l l0 mg / k l0 (1 mg / ) ⇒ (1 mg / ) 4 mg (8) 3mg (9) l mg / k mgl0 / l0 / 3 ВИСНОВКИ 22 1. Встановлено існування стабільних мод коливань і пояснено причину їх виникнення. 2. Систематизовано різні моди коливань та встановлено їх зв’язок з початковими умовами. 3. Величина енергії, якою обмінюються системи визначається співвідношенням .E E0g 2 E0пр 4. Існують дві моди коливань, при яких не відбувається обмін енергіями між підсистемами і підсистеми коливавються майже незалежно. 5. Експериментально спостерігати перекачку енергії на прикладі гумового маятника складно через швидке затухання коливань. При збільшенні амплітуди коливань зростає частота передачі енергії, що ускладнює експериментальні спостереження. Найкраще виконувати дослідження на металевих пружинах з високою добротністю. Дякую за увагу!