Системный анализ, управление и автоматизация
реклама

ВЕСТН. САМАР. ГОС. ТЕХН. УН-ТА. СЕР. ТЕХНИЧЕСКИЕ НАУКИ. 2009. № 2 (24)
Системный анализ, управление и автоматизация
УДК 519.816+519.876.5
КАТЕГОРНЫЕ МЕТОДЫ АДАПТИВНОГО ФОРМИРОВАНИЯ
МНОГОМОДЕЛЬНЫХ КОМПЛЕКСОВ В ИНФОРМАЦИОННЫХ
СИСТЕМАХ АНАЛИЗА СОСТОЯНИЯ СЛОЖНЫХ ТЕХНИЧЕСКИХ
ОБЪЕКТОВ1
В.И. Батищев, Н.Г. Губанов, Д.Н. Косарев2
Самарский государственный технический университет,
443100, Самара, ул. Молодогвардейская, 244
Работа посвящена методам автоматической стру
ктуризации данных и формирования категорных моделей баз знаний, построению и исследованию методов формирования многомодельных комплексов, основанных на синтезе дедуктивных и индуктивных методов логического вывода.
Ключевые слова: сложные технические объекты, многомодельные комплексы, алгоритмы логического вывода.
Создание комплексной методологии анализа и построения информационноаналитических систем оценки состояния сложных технических объектов является
актуальной в русле современных тенденций к интеграции информационноизмерительных систем, систем имитационного моделирования, систем интеллектуального анализа данных, а также подсистем управления базами данных и базами
знаний. Данный факт подтверждается активными работами над созданием, внедрением и техническим сопровождением автоматизированных систем четвёртого поколения, которые характеризуются как адаптивные интегрированные пространственно-распределенные неоднородные системы обработки данных с перестраиваемыми
структурами [1]. Необходимость разработки подобных методологий обусловлена
возрастающей сложностью и стоимостью объектов анализа – сложных технических
объектов, когда число оцениваемых параметров исчисляется десятками тысяч, а
также накладываются топологические, структурные аспекты при обработке информации, необходимость вычислений в реальном масштабе времени. Кроме того, объекты анализа данного класса характеризуются единичностью изготовления, разнородностью, неполнотой, а зачастую противоречивостью, с одной стороны, данных
об объекте, а с другой – информационной избыточностью. Указанные свойства обуславливают ряд объективных проблем в вопросах эффективного принятия решений
1
2
Работа выполнена в рамках гранта РФФИ 09-08-00459-а.
Батищев Виталий Иванович – доктор технических наук, профессор.
Губанов Николай Геннадьевич – кандидат технических наук, доцент.
e-mail: vib@list.ru
Косарев Дмитрий Николаевич – аспирант.
5
на этапах целевого использования объекта анализа. Специалисты [2] указывают на
неточность исходных данных в качестве основной причины неточности анализа состояния сложных систем. Неполнота и противоречивость данных о системе обусловлена дороговизной, неэффективностью, а зачастую и невозможностью получения полной информации об объекте и среде его функционирования, разнородностью
информации об объекте в виде точечных замеров и значений параметров; допустимых интервалов их изменения; статистических законов распределения для отдельных величин; нечетких критериев и ограничений, полученных от специалистовэкспертов.
В качестве некоторого обобщения основных источников, формирующих информационное пространство, можно назвать: данные на выходе ИИС; известные закономерности, заложенные в техдокументации, где данными являются объективные
законы реального мира, накопленные в фактографических и документальных системах; выявленные закономерности, в частности имитационные модели. Каждый из
источников в настоящее время является информационной основой для соответствующих направлений системного анализа, моделирования и управления сложными
системами. Однако каждый вид ресурса обладает рядом принципиальных ограничений, существенно сужающих область его применения, в то же время имеют место
существенные предпосылки для системной интеграции перечисленных ресурсов.
Применение комбинации подходов правдоподобного и достоверного вывода позволит получать новые нелинейные эффекты при синтезе информационноаналитических систем.
Возникает необходимость в конструктивном формальном аппарате, инвариантном к представлению и обработке разнородной информации из вышеперечисленных
источников.
При построении систем анализа, как правило, встают вопросы выбора методов
формализации информационных ресурсов, формирования правил построения структур, а также проблемы анализа и построения на данных структурах алгоритмов генерации и отбора альтернатив решений. Конструктивным подходом к интеграции
различных видов моделей объекта является применение методов категорнофункторного анализа. Данный подход позволяет сохранить целостность представления объекта за счёт инвариантности способа полимодельного описания объекта и
свести исследования задач одного вида к задачам другого вида, а согласование разнородных моделей осуществлять на основе анализа принадлежности к заданной категории. Предложены алгоритмы автоматического формирования категорных структур, базирующиеся, в частности, на основе анализа мер близости. В рамках данного
подхода разработаны правила формирования полимодельных структур на основе
операций наследования и композиции.
Практика показала эффективность синтеза различных подходов вывода в системах анализа. В основе построения баз знаний используют синтез индуктивных и абдуктивных методов логического вывода. Абдукция, как процесс формирования объясняющей гипотезы, служит методологической основой построения алгоритмов
правдоподобного вывода. Функционально абдуктивный вывод заключается в принятии решения по выбору оптимального объяснения наблюдения на основе заданной
теории. Для данного исследования абдукция интересна как средство решения следующих классов задач: задача распознавания целей и стратегий деятельности субъекта, задача формирования моделей наблюдения за объектом, задача накопления и
усвоения знаний.
6
Алгоритм функционирования систем для пересматриваемой аргументации заключается в выполнении последовательности следующих процедур [3]: определение
аргумента как дерева выводов, основанного на посылках, либо как дедукции; определение конфликта между аргументами, которые идентифицируются как опровержение аргумента; определение поражения аргумента формированием бинарного отношения на множестве аргументов; оценка аргументов по параметрам, определяемым спецификой предметной области.
Отмечается [4,6], что до настоящего времени количественная оценка гипотез и,
соответственно, сравнение и отбор закономерностей во многом являются нерешённой проблемой. Проблемы построения абдуктивного вывода заключаются в выборе
критерия оценки варианта объяснения, характеризующего степень его правдоподобия. Общая оценка качества абдукции основана на ряде подходов: подходы, основанные на покрытии множеств, предполагающие порождение и отбор подмножества
гипотез, представляющих наилучшее объяснение для наблюдения; подходы, основанные на логике; подход на уровне знаний, рассматривающий абдукцию на уровне
неявных убеждений; подходы, основанные на логических моделях.
Индуктивный вывод, позволяющий в сложных системах строить обобщенные
модели знаний, основан на построении некоторого общего правила и анализа конечного множества наблюдаемых фактов. Качество обобщённых моделей зависит от
полноты набора фактов, которым метод пользуется при формировании гипотез.
Процедурно процесс индуктивного вывода сложноформализуем и заключается в
машинном построении новых гипотез на основе наблюдаемых фактов. Индукционный вывод позволяет решать следующие классы задач: задача индуктивного формирования понятий с целью выделения наиболее общих или характерных фрагментов
знания при избавлении от случайной несистемной информации; задача машинного
обучения, где на основе анализа обучающей выборки даётся прогноз о новых объектах; задача распознавания, заключающаяся в формировании решающего правила,
относящего объект к определённому классу.
В настоящее время существуют конструктивные методы автоматического формирования алгоритмов мониторинга и управления структурной динамикой сложных
технических объектов (СТО) [1,6], которые базируются на оперативном формировании операторных цепочек, последовательного отображения измерительных и вычислительных параметров СТО для достижения цели анализа или управления. Данные технологии, в частности, базируются на обобщённых вычислительных моделях,
являющихся развитием недоопределённых моделей.
На принципах индуктивного логического вывода, статистической обработки информации, а также информационных технологиях DM, OLAP, KDD основан целый
класс аналитических систем, которые, по мнению аналитиков рынка программных
продуктов, составляют существенную часть стоимости СТО в целом. Полученные современные результаты и алгоритмы, позволившие автоматизировать решение таких
задач, как синтез схем программ; задача доказательства теоремы в формальнодедуктивной системе; методология проверки на модели (model checing); алгоритмы
распараллеливания вывода; определение критерия качества моделей в индуктивном
выводе на основе теоретико-информационного подхода в русле принципа минимальной длины описания через понятие алгоритмической сложности, показывают перспективность использования в рамках одной системы комплексного подхода, включающего абдукции для получения гипотез, которые объясняют наблюдения за параметрами
системы состоянием среды, индукции для формирования и оценки правил вывода и
7
дедукции для прогнозирования перспективного состояния системы.
Приняв во внимание, что составляющие системы – программные объекты и взяв
за основу систему продукций, рассмотрим следующую формальную модель
Рi M , M , Ri , Oi , где в качестве множества заданных литералов M i продукционной системы и множества формируемых литералов M i продукционной системы
определены обобщённые вычислительные модели; Ri – множество продукций i-того
вида, Oi – множество процедур присвоения i-того вида; M A, FM ,
где A i , i 1,, n – конечное множество параметров состояния объекта, FM – конечное
множество
отношений
на
множестве
параметров
из
A;
F fi , i 1, , k – отношение на множестве параметров f , gr f .
Множество всех отображений для всех отношений f FM , входные параметры
in = Z in для оператора , выходные параметры out = Z out для оператора .
Взяв за основу категорный подход к формированию продукций [5], можно выстроить иерархию моделей заданной категории по степени детализации: M iB – базис мо-
делей i-той категории, M i0 , – исходное состояние модели (вычислительного ал-
горитма), Hom Si0 , SiB , M iu , – производное исходное состояние модели (вычислительного алгоритма), Hom M iu , M iB – условие сопоставимости. Соответственно, распознавая ситуацию, система активизирует некоторую продукцию, сопоставимую с заданной ситуацией. Специалистами указывается [6], что в данной ситуации актуальна задача квалиметрии моделей, которая заключается в формировании
подхода, позволяющего с единых позиций проводить оценку, сравнение, упорядочивание моделей. Сформированное множество иерархий моделей дает возможность
использовать их в алгоритмах вывода. Отбор моделей осуществляется на основе
двух альтернатив: при наличии удовлетворительной модели – детализация выходных данных (дедуктивных алгоритмов вывода); при отсутствии удовлетворительной
модели – построение обобщённой модели (индуктивных алгоритмов вывода).
Как было упомянуто ранее, особый интерес представляет не просто оценка параметров системы, а анализ топологии, соответствующей структуре объекта. В частности, конструктивна идея доказательства непрерывности отображения между физическими процессами в системе, измерительной информацией и состоянием вычислительного процесса, что позволяет сделать вывод об адекватности процесса анализа.
Основу систем анализа состояния СТО составляют полимодельные комплексы.
Проблема создания алгоритмов формирования и представления полимодельных
структур является одной из ключевых в современном системном моделировании.
Структура и функционирование аналитических систем – S зависит от следующих
информационных сущностей: объекта анализа (СТО) – Q ; цели функционирования
аналитической системы – G , определяемой конкретной задачей принятия решения;
полимодельного комплекса, задающего структуру системы – M ; среды, определяющей параметры системы – C , а также отношений между данными структурами
R rQ, M , rQ,C , rQ ,G , rM ,C , rQ ,M , rQ ,C . Соответственно, информация по всем имеющимся
в распоряжении субъекта информационным ресурсам
8
Z
определится как
M , R ,
Z
тогда
формирование
новой
структуры
информационно-
Q
аналитической системы можно представить в следующем виде: F Z , M G , , где
M G – целевая структура системы, M b , p – алгебра формирования структур, где
M b – множество базовых классов элементов структур M , а p N , K – операции
формирования структуры системы, N – операция наследования, K – операция композиции. Комбинация данных операций формирования структуры системы, в отличие от конкатенации, позволяет сохранять целостность представления системы на
различных уровнях иерархии. Алгоритмы формирования базовых классов объектов Ab Z , G, M b являются, по сути, проблемно-ориентированной декомпозицией
Z , а стратегия построения данных алгоритмов лежит в русле принципа семиотической интроспекции, заключающегося в идентификации различий и обобщении подобий множества объектов.
Модель объекта M i описывает некоторые его свойства в соответствующих категориях. Соответственно можно рассматривать M i как объект категории ObM i , а
взаимосвязь между объектами – как морфизмы MorM i . Применительно к задаче
таксономии категории формируются на основании [7] признакового пространства
I n i1 , i2 , , in , множества классов Kl M и самих объектов таксономии M . Объекты, принадлежащие одному классу, являются изоморфными, другими словами,
неразличимыми в признаковом пространстве I n , а классы объектов Kl M в данном
признаковом пространстве являются гомоморфными, образуя при соответствующих
свойствах признакового пространства категорию Cat M .
Полимодельное описание объекта определяется совокупностью моделей различных категорий M poly
k
i 1
M i . Формирование правил отображения модели одного
вида в другой требует построения функтора F M v , M u , вид которого определяет
отношения между моделями видов v, u . Соответственно возможно формирование
знаний категории Cat M u при недостаточных условиях формирования категории
при помощи процедуры таксономии A . В этом случае возможна процедура
A' : F M v Cat M u , которая позволяет строить и обрабатывать гипотезы отно-
сительно знаний одной категории, применяя их к знаниям другой категории, что
расширяет практические возможности добывания знаний.
Алгоритмы реструктуризации данных полимодельных комплексов, заключающиеся в коррекции отношений между объектами категории, формировании новых
категорий и редакции имеющихся, основаны на подходе наследования новой структуры из существующей, формирования иерархической или сетевой структуры из
компонент полимодельных комплексов.
Пусть Sbpm – базис категории, S0pm , – исходный объект; Hom S0pm , Sbpm
– отношение между данными объектами;
Hom Sipm , Sbpm .
S
i
pm
, – производный объект, где
9
Условие сопоставимости заключается в выполнении следующих условий:
Hom S0pm , Sipm ;
Hom Sipm , S jpm Sipm , N S jpm ,
тогда
,
Hom Sipm , S jpm Sipm , N S jpm , ,
где N – операция наследования объекта Sipm , в S jpm , .
В общем виде стратегия оперирования вычислительными моделями следующая:
либо модель является объектом дедуктивного вывода и формирует более детальный
результат, либо представляет собой объект индуктивного для структур более высокой иерархии.
Таким образом, задание цели анализа вызывает активизацию нескольких конкурирующих вычислительных схем 1 , 2 , , n , формирование которых осуществляется на основе множества игровых ситуаций I , kj .
Вышеизложенный материал лёг в основу формально-математического аппарата
для представления, анализа и обработки разнородных данных и моделей, включающего в себя методы автоматической структуризации данных и формирования категорных моделей баз знаний, методы анализа свойств и отношений на моделях данных и знаний, методы формальной декомпозиции и агрегирования на элементах
структур данных. Предложенная методология показала свою эффективность в процессах автоматизации формирования модели городской транспортной системы.
Анализ существующих транспортных систем явился основой формирования алгоритмов адаптации заданной системы, что позволило существенно снизить объём
ручной доработки данного программного проекта по сравнению с аналогичными
проектами.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Охтилев М. Ю. Интеллектуальные технологии мониторинга и управления структурной динамикой
сложных технических объектов [Текст] / М. Ю. Охтилев, Б. В. Соколов, P. M. Юсупов. – М.: Наука,
2006. – 410 с.
2. Батищев В.И. Аппроксимационные методы и системы промышленных измерений, контроля, испытаний, диагностики [Текст] / В.И.Батищев, В.С.Мелентьев. – М.: Машиностроение-1, 2007. – 393 с.
3. Вагин В. Н. Достоверный и правдоподобный вывод в интеллектуальных системах [Текст] / В. Н.
Вагин, Е. Ю. Головина, А.А. Загорянская, М. В.Фомина. – М.: Физматлит, 2004. – 704 с.
4. Батищев В.И. Категорное представление сложных технических объектов в индуктивных системах
логического вывода [Текст] / В.И. Батищев, Н.Г. Губанов // Проблемы управления и моделирования
в сложных системах: Тр. IX Международ. конф. – Самара: СНЦ РАН, 2008. – С. 185-191.
5. Стефанюк В.Л. Локальная организация интеллектуальных систем [Текст] / В.Л. Стефанюк. – М.:
Физматлит, 2004. – 328 с.
6. Соколов Б.В. Концептуальные основы оценивания и анализа качества моделей и полимодельных
комплексов [Текст] / Б.В.Соколов, P. M. Юсупов // Изв. РАН Теория и системы управления. – 2004.
– №6. – С. 5-16.
7. Загоруйко Н.Г. Прикладные методы анализа данных и знаний [Текст] / Н.Г.Загоруйко. – Новосибирск: Изд-во Ин-та математики, 1999. – 270 с.
8. Потапов А.С. Распознавание образов и машинное восприятие: Общий подход на основе принципа
минимальной длины описания [Текст] / А.С. Потапов. – СПб.: Политехника, 2007. – 548 с.: ил.
9. Губанов Н.Г. Категорный подход при формировании полимодельных комплексов сложных систем
10
[Текст] / Н.Г. Губанов // Вестник Самар. гос. техн. ун-та. Сер. Технические науки. 2008. Вып. 1 (21) С.
183-185.
10. Батищев В.И. Методология оперативной реструктуризации информационных систем анализа состояния сложных технических объектов [Текст] / В.И. Батищев, Н.Г. Губанов // Проблемы управления и моделирования в сложных системах: Тр. IX Международ. конф. – Самара: СНЦ РАН, 2008. –
С. 187-193.
Статья поступила в редакцию 25 июня 2009 г.
UDC 519.816+519.876.5
THE KATEGORING METHDOLOGICAL THE CONSTRUCTING
OF THE INFOMATION SYSTEMS ANALYSIS STATE
ON THE COMPLEX OBJECTS
V.I. Batishchev, N.G. Gubanov, D.N. Kosarev1
Samara State Technical University,
244, Molodogvardeyskaya str., Samara, 443100
The methods of constructing the kategoring models of complex objects on the basis of inductive
logical conclusion are given. The practical application questions of models data in the analytical systems are examined.
Key words: complex technical objects, multi-model systems, logical deduction algorithms.
1
Vitaliy I. Batishchev – Doctor of Technical Sciences, Professor.
Nikolay .G. Gubanov – Candidate of Technical Sciences, Associate professor.
Dmitriy N. Kosarev – Postgraduate student.
11
УДК 62-533.65
УСТОЙЧИВОСТЬ, УПРАВЛЯЕМОСТЬ И НАБЛЮДАЕМОСТЬ
СИСТЕМ ОБОГРЕВА ПОМЕЩЕНИЙ В УСЛОВИЯХ НЕПОЛНОТЫ
ИЗМЕРЕНИЙ
А.Н. Дилигенская, В.Г. Щетинин1
Самарский государственный технический университет,
443100, Самара, ул. Молодогвардейская, 244
Рассматривается постановка задачи синтеза системы управления технологическим
объектом в условиях неполной информации о компонентах вектора состояния на примере автономной отопительной системы.
Ключевые слова: неполная наблюдаемость, управление, устойчивость, отопительная
система, идентификатор состояния.
Разработка систем управления, работающих в условиях неполной наблюдаемости объекта управления, в настоящее время весьма актуальна. Применение в таких
системах методов восстановления информации с использованием наблюдателей
полного или пониженного порядка предоставляет возможность получить высокое
качество управления при максимальной простоте аппаратной реализации, упростить
эксплуатацию.
Рассмотрим вариант системы управления автономной отопительной установкой,
предназначенной для поддержания заданной температуры воздуха в комплексе бытовых или производственных помещений. Источником тепла является теплоагрегат
(нагреватель), локальная система управления которого обеспечивает регулирование
температуры теплоносителя в функциональной зависимости от температуры наружного воздуха. Регулирование температуры внутри помещений обеспечивается за
счет управления мощностью теплоисточника. В качестве контролируемой величины
используется температура теплоносителя на выходе нагревателя. Выбор такой координаты обусловлен простотой реализации системы. Кроме того, при этом отпадает
необходимость монтажа большого числа датчиков и исполнительных механизмов
(задвижек). Температура в помещениях регулируется на основе температуры теплоносителя. При этом контролируемая величина соответствует цели управления – температуре внутри помещения – со значительной долей отклонений. Велико влияние
неконтролируемых возмущений – внешних (наружные воздействия), внутренних
(бытовые тепловыделения – люди, электроустановки), параметрических (открытые
окна, двери и т.п.), приводящих к тому, что качество управления (статическая и динамические ошибки) становится во многих случаях неудовлетворительным. Повысить качество регулирования и, как следствие, степень комфортности при влиянии
возмущающих воздействий без введения комплекса измерителей температуры и исполнительных механизмов в каждом помещении возможно при введении в контур
регулирования идентификатора состояния, восстанавливающего неизмеряемое значение температуры воздуха в помещении.
Модель объекта управления конструируется на основе базового уравнения сохранения тепловой энергии [1]. Уравнение динамики нагревателя, рассматриваемое
1
12
Дилигенская Анна Николаевна – кандидат технических наук, доцент.
Щетинин Владимир Георгиевич – кандидат технических наук, доцент.
за период времени t , имеет вид
VнQV t cн нVн 0н (t ) н Fн (0н 0в )t ,
(1)
кДж
кг
где cн , н , н – теплоемкость 0 , плотность 3 , коэффициент теплоотдачи
кг С
м
вт
от нагревателя к воздуху 2 0 соответственно; Vн , Fн – объем м 3 и поверхм С
ность нагревателя м соответственно; QV – объемная мощность тепловыделения
вт
в нагревателе 3 ; 0в , 0н , 0н – температура воздуха, нагревателя и ее приращем
ние за время t соответственно.
Выражение в правой части (1) отвечает выделению энергии в теплоисточнике,
первое слагаемое соответствует изменению теплосодержания теплоносителя, второе
– теплоотдаче от теплоисточника, передаваемой температуре воздуха в помещении.
Переходя в соотношении (1) к малому приращению при t 0 , получим дифференциальное уравнение для динамики температуры теплоносителя:
2
d0н
н Fн 0н (t ) н Fн 0в Vн QV (t ) .
(2)
dt
Применяя к (2) преобразование Лапласа, запишем уравнение динамики в пространстве изображений:
cн нVн
(cн нVн p н Fн ) н0 ( p) н Fн в0 ( p) VнQV ( p)
где
н0 ( p)
(t )е
L 0н (t )
0
н
pt
,
dt в0 ( p) L 0в (t ) , QV ( p) LQV (t )
(3)
– трансфор-
0
манты температур нагревателя, воздушной массы в помещении и мощности теплоисточника.
Преобразуем уравнение (3) и, введя обозначения
Тн
cн нVн
;
н Fн
kн
Vн
н Fн
,
(4)
представим его в стандартной форме апериодического звена:
(Т н p 1) н0 ( p) в0 ( p) kнQV ( p) .
(5)
Аналогично (1) запишем уравнение нагрева воздушной массы нагреваемого помещения:
н Fн (0н (t ) 0в (t ))t cв вVв 0в kFв (0в (t ) 0с (t ))t ,
(6)
где cв , в , k – теплоемкость, плотность воздушной массы и коэффициент теплопередачи от воздуха к окружающей среде 0с соответственно; Vв , Fв – объем воздушной
массы и поверхность теплопередачи.
Левая часть (6) отвечает количеству тепла, передаваемого от теплоисточника
воздуху помещения, первое слагаемое правой части – повышению теплосодержания
воздуха, второе слагаемое – потери тепла из помещения в окружающую среду.
Соответствующие преобразования уравнения (6) приводят к дифференциально13
му уравнению для нагреваемой воздушной массы
d0в
(k Fв н Fн )0в (t ) н Fн 0н (t ) k Fв 0с (t )
dt
и с учетом вводимых обозначений
cв вVв
Тв
cв вVв
н Fн
; kв
;
kFв н Fн
kFв н Fн
kс
,
kFв
kFв н Fн
(7)
(8)
можно перейти к уравнению для трансформант Лапласа, отвечающему апериодическому звену
(Т в p 1) в0 ( p) kв н0 ( p) kс с0 ( p)
.
(9)
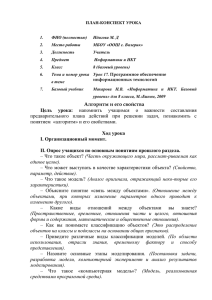
Математическую модель системы управления, соответствующую совокупности
уравнений (5) и (9), представим в виде структурной схемы, изображенной на рис. 1.
Р и с. 1. Структурная схема системы управления температурой воздушной массы
Проанализируем полученную структуру системы, формально имеющую вид замкнутой системы с положительной обратной связью. Исследуем ее устойчивость.
Передаточная функция замкнутой системы по каналу: мощность нагревателя –
температура воздушной массы помещения имеет следующий вид:
kв
1
Tн p 1 Т в p 1
kв
W ( p)
.
(10)
2
kв
1
Т
Т
p
(
Т
Т
)
p
(
1
k
)
н
в
н
в
в
1
Тн p 1 Тв p 1
Необходимым и достаточным условием устойчивости [2] системы второго порядка является строгая положительность всех коэффициентов характеристического
уравнения Т нТ в p 2 (Т н Т в ) p (1 kв ) 0 замкнутой системы. Для рассматривае н Fн
1
1 , помой системы, учитывая в соответствии с (8), что kв
k
F
k Fв н Fн
в
1
н Fн
лучаем, что а0 Т нТ в 0; a1 Т н Т в 0; a2 1 kв 0 , следовательно, система
устойчива.
Согласно уравнениям объекта (5) и (9) и представленной структурной схеме
(рис. 1), процессы, протекающие в нагревателе и контактирующей воздушной массе
помещения, моделируются стандартными пропорциональными и апериодическими
звеньями первого порядка. Коэффициенты нагревательного устройства kн , Т н определяются конкретным технологическим вариантом его исполнения, и их можно счи14
тать известными. Коэффициенты kв , Т в зависят от габаритов (и других параметров)
нагреваемого помещения. Управляющим входным воздействием является объемная
мощность тепловыделения нагревателя QV , а температура окружающей среды 0с
рассматривается как возмущающее воздействие. Неконтролируемые возмущающие
воздействия на объект (люди, окна, энергоустановки т.д.) могут быть рассмотрены
как изменение коэффициентов kв , kс ,Т н , Т в в определенных пределах или дополнительно быть включены в аддитивную помеху, приведенную к выходу, и промоделированы случайным сигналом типа «белого шума», характеризующимся нулевым математическим ожиданием и постоянным среднеквадратичным отклонением.
Проведем анализ системы управления в пространстве состояний с использованием векторно-матричных моделей, характеризующихся универсальностью алгоритмов управления. Вводя в (2) и (7) следующие обозначения:
0н (t ) x1 (t ); 0в (t ) x2 (t ); QV (t ) u1 (t ); 0с (t ) u2 (t ) ;
н Fн
;
cн нVн
kF н Fн
a22 в
;
cв вVв
a11
a12
н Fн
;
cн нVн
a21
н Fн
;
cв вVв
1
kFв
b1
; b2
,
cн н
cв вVв
(11)
представим исходную математическую модель объекта управления в следующей
универсальной матричной форме:
dX
AX (t ) BU (t ); Y (t ) CX (t ).
dt
В (12)
X x1
(12)
x2 Т – транспонированный вектор состояния системы;
Uu1 u2 – транспонированный вектор входов системы; ... Т – знак транспоТ
нирования; Y – вектор наблюдений. Квадратные матрицы А и В и матрица-строка С,
формирующая вектор наблюдений, имеют следующий вид:
a
a
b 0
A 11 12 , B 1
, C 1 0 ,
a21 a22
0 b2
(13)
и их коэффициенты считаются известными.
Исследование управляемости и наблюдаемости линейной стационарной системы сводится к проверке рангов матриц управляемости RU и наблюдаемости RD [3].
b 0 a11 a12 b1 0 b1 0 a11b1 a12b2
RU В АВ 1
.
0 b2 a21 a22 0 b2 0 b2 a21b1 a22b2
(14)
Ранг матрицы управляемости (14) равен двум, т.е. порядку системы, и, следовательно, система управляема.
1 a
a 1 1 a11
RD С Т АТ С Т 11 21
.
0 a12 a22 0 0 a12
(15)
Ранг матрицы наблюдаемости также равен двум, следовательно, система
наблюдаема.
На основании проверки критериев управляемости (14) и наблюдаемости (15)
15
можно заключить, что для рассматриваемой линейной стационарной системы существует управление, которое переводит любое состояние Х в требуемое за ограниченное время. В условиях отсутствия измерения всех компонент вектора состояния
это управление может быть реализовано в виде обратной связи по состоянию, для
организации которой необходимо сначала найти оценку неконтролируемой координаты – температуры воздуха помещения. Далее, при известном (оцененном) состоянии существует возможность синтеза управляющего воздействия, при котором выходная величина будет удовлетворять налагаемым требованиям.
С учетом принципов разделимости и принципов дуальности [2, 3] задачи синтеза наблюдателя состояния и синтеза регулятора состояния решаются независимо
друг от друга.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
Шорин С.Н. Теплопередача. – М.: Высшая школа, 1964. – 489 с.
Андреев Ю.Н. Управление конечномерными линейными объектами. – М.: Наука, 1976. – 424 с.
Эйкхофф П. Основы идентификации систем управления: Пер. с англ. – М.: Мир, 1975. – 683 с.
Статья поступила в редакцию 10 июня 2009 г.
UDC 62-533.65
STABILITY, CONTROLLABILITY AND OBSERVABILITY
OF INDOORS HEATING SYSTEM IN CONDITIONS
OF INCOMPLETENESS OF MEASUREMENTS
A.N. Diligensky, V.G. Schetinin1
Samara State Technical University,
244, Molodogvardeyskaya str., Samara, 443100
The questions of stability, controllability and observability of the indoors temperature control
system in the presence of uncontrolled disturbances are now in consideration. The nonmeasurable
indoors
temperature
is
reconstructed
using
state
observer.
Keywords: incompleteness of measurements, control, stability, heating system, state observer.
1
16
Anna N. Diligensky – Candidate of Technical Sciences, Associate professor.
Vladimir G. Schetinin – Candidate of Technical Sciences, Associate professor.
УДК 519.71 (043.3)
СИСТЕМНЫЙ АНАЛИЗ И СОВЕРШЕНСТВОВАНИЕ
ОРГАНИЗАЦИОННЫХ СТРУКТУР УПРАВЛЕНИЯ
ДЕЯТЕЛЬНОСТЬЮ ГЕНЕРИРУЮЩЕГО ПРЕДПРИЯТИЯ
Н.В. Дилигенский, А.Г. Салов1
Самарский государственный технический университет,
443100, Самара, ул. Молодогвардейская, 244
Проведён анализ структур управления энергетическим предприятием. Анализ эффективности структур проводился на основе теории графов. Для оценки в статье предложены локальные критерии оценки качества: сбалансированность, целостность,
управляемость и устойчивость структур. Для выявления наиболее эффективной
структуры по совокупности всех критериев сформулирован глобальный критерий качества путём свертывания частных критериев, который позволил выбрать из рассматриваемых структур оптимальные.
Ключевые слова: структура управления, теория графов, локальные критерии качества,
глобальный критерий качества, сбалансированность структур, целостность структур, управляемость и устойчивость структур.
Одним из основных условий успешного перехода к рыночным отношениям
предприятий энергетики является соответствие организационной структуры управления целям, стоящим перед предприятием в этот период.
В переходный период организация управления производством должна опираться на целостные свойства и закономерности поведения предприятий, которых не
было у его составляющих частей.
Проведём системный анализ эффективности существующих организационных
структур управления энергетическим предприятием с целью определения соответствия существующей системы управления требованиям целей и факторам внешней
среды и реальному положению дел на предприятии.
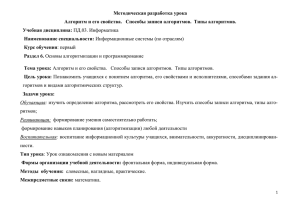
На рис. 1 приведена типичная организационная структура управления ТЭС региональной энергосистемы.
Анализ деятельности энергосистемы показал постоянно меняющиеся цели и задачи, определяемые экономической ситуацией в стране и проводимой политикой
реорганизации и реструктуризации энергетического комплекса, которые не находят
достаточного отражения в существующих структурах систем управления энергетическим предприятием.
Анализ эффективности структур проводился на основе методологии теории
графов [1], [2]. Для многокритериального оценивания и оптимизации организационных структур были применены подходы, предложенные в [3], [4].
Представление базовой организационной структуры в виде графа G1 приведено
на рис. 2.
(1)
G1 a0 , a1 , a9 , b1 , b2 b15 , c1 , c2 c14 .
1
Дилигенский Николай Владимирович – доктор технических наук, профессор.
Салов Алексей Георгиевич – кандидат технических наук, доцент.
17
18
Р и с. 1. Типовая структура управления станцией
Вершинами графа G1 являются источники формирования и получатели управленческих воздействий, а ребра графа ( a0 a1 ), ( a 0 a 2 ) ( a 0 a9 ), ( a1 b1 ), ( a1 b2 ) и т.д.
отвечают управленческим связям организационной структуры.
Так, вершина a0 отвечает директору ТЭС, a 6 – главному инженеру, b8 – заместителю директора по строительству и т. д.
Было проанализировано 12 структур организационного управления тепловой
станцией. Из них одна структура, в соответствии с которой осуществлялось управление в период функционирования плановой экономики, является типовой, другая
является действующей в настоящее время на предприятиях энергетической системы;
проводился также анализ прочих возможных структур управления, представляющих
собой их модификации.
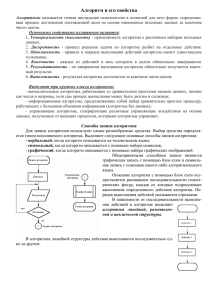
На рис. 3 приведена действующая структура управления энергетическими предприятиями Самарской области, введённая в период перестроек, а на рис. 4 показан
соответствующий ей граф.
Р и с. 3. Граф базовой структуры
Р и с. 4. Граф действующей структуры
19
20
Р и с. 2. Действующая структура управления ТЭЦ
Для оценки эффективности различных структур управления, формализованных
соответствующими графами, разработана система показателей, состоящая из 4-х
групп локальных критериев качества, оценивающих сбалансированность, целостность, управляемость и устойчивость структур.
Для характеристики сбалансированности структур были предложены следующие частные показатели: информационная нагрузка на высшем уровне иерархии,
наибольшая информационная нагрузка у лиц, принимающих решения, неравномерность информационной нагрузки у различных участников управленческой деятельности. Они были формализованы соответственно степенью однородности deg a0
соответствующей вершины графа a0 , максимумом степени однородности
max dega0 , и максимумом степени неоднородности max dega0 min degb0 ,
aV (G)
aV (G )
bV (G )
где V (G) – множество вершин графа.
В качестве показателей целостности структуры управления были приняты две
характеристики
размера
графа:
диаметр графа
–
максимум
d (G )
d (G) max d (a, b) , радиус графа r (G) – минимум r (G) min max d (a, b) и
a,bV (G )
aV (G ) bV (G )
число центров графа – вершин ai , относительно которых выполняется условие минимакса max d (ai , b) min max d (a, b) , где d (a, b) – расстояние – количество
bV (G )
aV (G ) bV (G )
рёбер кратчайшей простой цепи, соединяющей вершины a и b .
Для оценки управляемости были предложены показатели: общее число информационных каналов управления, определяемое количеством ребер графа и число
различных замкнутых контуров управления в организационной структуре, формализуемое циклическим рангом графа (цикломатическим числом). В качестве показателей устойчивости были взяты числа внешней и внутренней устойчивости графа.
Предложенные частные критерии качества и их значения для рассматриваемых
структур приведены в табл. 1.
Проведённый на основе десяти предложенных частных критериев качества анализ эффективности рассматриваемых структур управления показал, что полученные
значения локальных оценок эффективности качества структур по разным критериям
дают различные, не совпадающие между собой противоречивые результаты. В
принципиальном плане при многокритериальной оценке качества функционирования сложных систем такая ситуация является типичной.
Различные критерии характеризуют разные аспекты исследуемой структуры, и в
общем случае найти комплексную оценку эффективности организационных структур, таким образом, не представляется возможным.
Для выявления по совокупности всех критериев наиболее эффективной структуры сформулируем глобальный критерий качества путём свертывания частных критериев.
Для отыскания обобщенной системной оценки эффективности организационных
структур управления использована DEA-методология многокритериального оценивания, которая, в отличие от большинства многокритериальных подходов, не требует задания значений весовых коэффициентов частных показателей качества, свертываемых в обобщенный, глобальный критерий эффективности. В соответствии с
DEA-подходом системный показатель эффективности организационной структуры
сконструирован в виде
21
Таблица1
Значения частных критериев качества рассматриваемых структур
№ Наименование
п/п величин
G1
Структуры управления
G2 G3 G4 G5 G6 G7 G8 G9 G10
Операция
G12 оптимизаG11
ции
Характеристики структуры
Число вершин
1
1.1
1.2
1.3
2
2.1
2.2
2.3
3
3.1
3.2
4
4.1
4.2
Показатели
качества
Сбалансированность
структур
Информационная нагрузка
первого
руководителя
Максимальная
информационная
нагрузка
Степень
неравномерности
информационной
нагрузки
Целостность
структур
Число центров
структуры
Диаметр
структуры
Радиус
структуры
Управляемость
структур
Число каналов
управления
Число контуров
управления
Устойчивость
структур
Число внешней
устойчивости
Число
внутренней
устойчивости
39 33 41 40 41 33 34 33 38
34
32
34
0,9 0,7
1
0,6
Минимизация
1,7 1,6 1,3 1,3 1,7 1,1 1,3 1,1 1,3 1,1
1
1,4
Минимизация
2,3 3,3
Минимизация
1,4 0,9
1
1
1
1
0,9
1
3 2,7 4,5 2,3 3,7
3
3
2
3
2,7
3
2
2
3
1
3
1
3
1
3
1
1
5
5
5
5
6
5
6
5
4
5
4
6
3
3
3
3
3
3
3
3
2
3
2
3
61 42 58 57 64 37 38 38 43
38
40
38
24 11 19 19 25
6
6
7
7
6
10
6
7
7
7
7
7
6
7
7
Максимизация
32 27 32 32 33 26 27 27 31
27
25
27
Максимизация
7
9
8
8
u1nY1n u2nY2n ... uknYkn
,
uin ,v jn U v1n X1n v2n X 2 n ... vmnX mn
f n max
22
Минимизация
Минимизация
Максимизация
Максимизация
Максимизация
(2)
где n – номер анализируемой структуры, n 1,2 N , N – число оцениваемых
структур; X in – минимизируемые локальные критерии качества, i 1,2M , M –
число минимизируемых частных показателей; Y jn – максимизируемые локальные
критерии качества, j 1,2 K , K – число максимизируемых частных показателей;
vin 0 и u jn 0 – неотрицательные весовые коэффициенты, характеризующие
вклады каждого локального показателя в глобальный критерий эффективности, значения которых на стадии формирования обобщенного критерия f считаются неизвестными, не задаваемыми из содержательных, экспертных или иных соображений;
U – область допустимых значений весовых коэффициентов.
Область значений весов U определяется системой ограничений, формируемой
исходя из положения, что величины обобщенных показателей эффективности для
всех структур f n нормируются на интервале [0, 1].
u1nY11 u2nY21 ... uknYk1
1;
v1n X11 v2n X 21 ... vmn X m1
u1nY12 u2 nY22 ... uknYk 2
1;
v1n X 12 v2 n X 22 ... vmn X m 2
(3)
……
u1nY1N u2nY2 N ... uknYkN
1.
v1n X1N v2n X 2 N ... vmnX mN
Сформулированная постановка обобщенного оценивания эффективности n-ной
организационной структуры управления (2), (3) определяет задачу нелинейного математического программирования. Решением этой задачи являются значения глобального критерия для n-ной структуры f n и величины весовых коэффициентов
частных показателей качества vin , i 1,2M и u jn , j 1,2 K . Решения N подобных задач математического программирования для n 1,2 N определяют значения обобщенных критериев эффективности и весовых коэффициентов для всех
анализируемых организационных структур.
Решение задачи (2), (3) для каждой из рассматриваемых структур дает значения
весовых коэффициентов и обобщенного показателя эффективности. Результаты расчёта f n для анализируемых структур приведены в табл. 2.
Анализ полученных значений обобщенного критерия показывает, что типовая
структура управления тепловой станцией достаточно близка к оптимальной, но существующая перегрузка первого лица – директора станции приводит к необходимости её модернизации.
Таблица 2
Обобщенный показатель эффективности рассматриваемых структур
Структуры
Функционал
fn
Типовая
0,9868
Модернизированные
5
6 7 8
1
2
3
4
0,8529
1
1
0,9321
0,9049
1
1
1
9
1
10
Нет опт.
решения
11
1
23
Наименее эффективной по построенному обобщенному критерию является
структура управления тепловой станцией 1, которая в настоящее время используется
на ТЭЦ региональной энергосистемы.
Модернизированные структуры 2, 3, 6, 7, 8, 9, 11 имеют одинаковое значение
обобщенного критерия, и по построенному функционалу они обладают одинаковой
эффективностью.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Нечипоренко В.И. Структурный анализ систем (эффективность и надежность). – М.: Советское радио, 1977. – 216 с.
2. Харари Ф. Теория графов. – М.: КомКнига, 2006. – 296 с.
3. Дилигенский Н.В. Структурный синтез локально оптимальных организационных систем управления
с обратными связями // Проблемы управления и моделирования в сложных системах: Тр. VIII Междунар. конф. – Самара: СНЦ РАН, 2006. – С. 57-65.
4. Дилигенский Н.В., Цапенко М.В. Многокритериальная оценка сравнительной эффективности организационных систем управления // Проблемы управления и моделирования в сложных системах: Тр.
VIII Междунар. конф. – Самара: СНЦ РАН, 2006. – С. 66-72.
Статья поступила в редакцию 10 июня 2009 г.
UDC 519.71 (043.3)
SYSTEM ANALYSIS AND DEVELOPMENT OF ORGANIZATIONAL
MANAGEMENT STRUCTURES OF GENERATING PLANT ACTIVITY
N.V. Diligensky, A.G. Salov1
Samara State technical university,
443100, Samara, st.Molodogvardeyskaya, 244
System analysis of energetic plant management structures was made. Analysis of structures efficiency was made on basis of graph theory. To estimate organizational structures efficiency
there are given local quality criteria evaluating balance, integrity, controllability and structures stability. To extract the most efficient structure on the basis of all criteria there was formulated global criterion, by folding local criteria, that allows choosing optimal structures
from the considered ones.
Key words: management structure, graph theory, local quality criteria, global quality criteria,
structures balance, structures integrity, structures controllability and structures stability.
1
24
Nikolay V. Diligensky – Doctor of Technical Sciences, Professor.
Aleksey G. Salov – Candidate of Technical Sciences, Associate professor.
УДК 519.6
АЛГОРИТМ СПЛАЙНОВОЙ ЭКСТРАПОЛЯЦИИ ПРИ РЕШЕНИИ
ЗАДАЧ ПОЛУБЕСКОНЕЧНОЙ ОПТИМИЗАЦИИ
А.П. Ефимов1
Самарский государственный технический университет,
443100, Самара, ул. Молодогвардейская, 244
Предложен алгоритм численного решения задач полубесконечной оптимизации с использованием экстраполирования минимизируемого поля на каждой итерации, что позволяет сократить число обращений к модели поля. В качестве экстраполянта предложено использовать псевдокубические сплайны. Показана эффективность данного подхода.
Ключевые слова: полубесконечная оптимизация, численные методы, итерации, сходимость, экстраполяция, Dm-сплайны, псевдокубические сплайны.
Введение
Исследованию задач полубесконечной оптимизации и разработке методов их
решения посвящено огромное количество работ. Это обусловлено тем, что задачи
полубесконечной оптимизации часто возникают при исследовании и оптимизации
различных реальных систем, процессов, объектов. Например, это задачи нагрева изделий в индукционной печи с заданной или максимальной точностью [1, 2].
Пусть имеется некоторая модель тепловых и прочих процессов в печи, которая
позволяет определять температуру T (a, x) в нагреваемой заготовке в заданном месте
технологической установки как функцию пространст
венной координаты
x X : x min x x max
и
некоторого
набора
оптимизируемых
параметров
a {a1 , a1 ,...an } . Каждый из оптимизируемых параметров имеет технологические
ограничения a A : aimin ai aimax , i 1; n . Тогда задача максимально точного
нагрева может быть сформулирована как задача нахождения значений оптимальных
aa *A,
параметров
при
которых
отклонение
температуры
(a, x) T (a, x) T * ( x) от заданного значения T * ( x ) минимально: найти значение
a * , при котором
I (a) max (a, x) min ,
xX
aA
min I (a) I (a ) .
*
*
aA
(1)
Величина * в (1) является максимально достижимой точностью минимизируемого поля ( a, x ) при управлении a A .
Для решения задач вида (1) разработан достаточно большой спектр подходов и
методов решения. Однако не все эти методы и подходы могут быть применены на
1
Ефимов Александр Порфирьевич – кандидат технических наук, доцент.
e-mail: usat@samgtu.ru
25
практике для получения решения задач, в которых функция ( a, x ) определяется
численно. Кроме того, по сути, отсутствуют подходы, ориентированные на минимизацию числа обращений к вычислению функции ( a, x ) .
Вместе с тем время только одного расчёта достаточно сложной системы, процесса, объекта может быть весьма значительным. Так, время моделирования процесса нагрева изделия в проходной индукционной установке с помощью пакета ANSYS
может составлять порядка десяти минут и более. При проведении оптимизирующих
итерационных расчётов суммарное время обращений к модели процесса может быть
весьма и весьма значительным и при этом составлять основную долю времени оптимизационного расчёта.
В этом случае оказываются оправданными любые временные и ресурсные затраты, направленные на уменьшение числа обращений к расчёту модели. Одним из
путей, позволяющих уменьшить число обращений к расчёту модели, может явиться
использование при определении новой итерационной точки всех или большинства
ранее полученных данных.
В частности, представляется возможным на каждом шаге итерационного поиска
~
экстремума строить некоторое приближение, экстраполяцию ( a, x ) функции
( a, x ) во всей области определения параметров управления, причём как в областях,
уже исследованных предыдущими итерациями, так и вне их. Такой экстраполянт
минимизируемого поля способен более точно прогнозировать поведение целевой
функции, и, как следствие, следующее приближение должно оказываться более точным по сравнению с аналогичным, полученным без учёта информации обо всех
предыдущих итерациях. Кроме того, появляется возможность при прогнозировании
очередного итерационного шага использовать для экстраполянта методы более высоких порядков.
~
К экстраполянту ( a, x ) функции ( a, x ) во всей области определения параметров управления, естественно, должны предъявляться определённые требования.
К таким требованиям наиболее общего вида, которые должны выполняться для подавляющего большинства экстраполируемых реальных полей, закономерностей, зависимостей, в том числе температурных полей, можно отнести целый ряд достаточно естественных и порой очевидных условий. Это, в первую очередь, достаточная
для практического использования простота реализации и возможность вычисления
первых производных от экстраполянта; достаточная гладкость экстраполянта и гарантированное отсутствие полюсов; отсутствие излишних экстремумов, точек перегиба, резкого изменения градиентов и радиусов кривизны экстраполянта.
Так как экстраполянт, естественно, не только должен приближать поле в уже
исследованных областях, но и в какой-то степени предсказывать поведение вне этих
областей, ряд требований должен предъявляться к поведению экстраполянта на удалении от исследованных областей. В частности, экстраполянт не должен вести себя
на удалении от исследованных областей «слишком резко». Можно предположить
ограничение изменения экстраполянта первой или второй степенью от расстояния
до исследованной области.
Все эти требования в значительной степени можно удовлетворить при использовании интерполяционных Dm-сплайнов и псевдополиномиальных, в первую очередь,
псевдокубических сплайнов на хаотических сетках. Интерполяционные Dm-сплайны
и псевдополиномиальные сплайны основаны на вариационном подходе к построе26
нию сплайн-функций, имеют вполне конкретную физическую и геометрическую интерпретацию и в настоящее время достаточно хорошо изучены ([3-7] и др.).
Алгоритм решения задач полубесконечной оптимизации с использованием
натуральных сплайнов
Рассмотрим более подробно алгоритм, реализующий подход с использованием
такой экстраполяции.
Предлагаемый алгоритм состоит из двух этапов: начального (подготовительного), при проведении которого накапливается начальная информация о минимизируемом поле, и основного (итерационного), в ходе которого происходит итерационное
приближение к решению задачи.
На начальном этапе просчитываются значения поля не менее чем в n 1 точке
пространства параметров управления, из которых n 1 не лежат в одной гиперплоскости. Эти начальные точки могут выбираться или произвольно, или из каких-либо
требований или представлений и информации о возможном расположении точки
l
оптимума. Итогом начального этапа является набор базовых точек a , l 1; N и
l
значений поля l ( x) (a , x) в этих точках.
Основной этап состоит из ряда циклически повторяющихся шагов.
Шаг 1. Выбор из всех рассчитанных ранее базовых точек набора базовых точек
в количестве N n 1 точки, которые наилучшим образом локализуют область поиска оптимума. Это, например, могут быть в первую очередь те ранее рассчитанные
базовые точки, которые наименее удалены от точки, характеризующейся минимальным значением максимального отклонения. На всех последующих шагах рассматриваются только те базовые точки, которые были выбраны на этом шаге. Сокращение
числа рассматриваемых базовых точек позволяет упростить и сократить вычисления
на последующих шагах без снижения точности интерполяции в области поиска решения рассматриваемой задачи. Разработка конкретного способа выбора учитываемых базовых точек является отдельной самостоятельной задачей.
~
Шаг 2. Построение на выбранном наборе базовых точек приближения ( a, x ) .
~
Использование для построения экстраполянта ( a, x ) псевдокубических сплайнов
позволяет сравнительно просто получить приближение с легко вычисляемыми производными и в значительной степени удовлетворяющее всем ранее сформулированным требованиям, предъявляемым к экстраполянту.
Шаг 3. Решение оптимальной задачи для построенного на предыдущем шаге
приближения:
~
~
I (a) max (a, x) min ,
xX
aA
~
~
min I (a) I (a~ * ) ~
* .
aA
(2)
При решении этой задачи существует возможность вычислять субградиенты
минимизируемой функции и, соответственно, использовать достаточно хорошо разработанные и эффективные методы. При этом главным требованием к применяемому на данном шаге методу является его надёжность. Число обращений к вычисле~
нию функции ( a, x ) на этом шаге не является критическим.
27
Шаг 4. Обращение к модели и получение значения поля (a~ * , x) в точке, полученной на предыдущем шаге. Эта точка включается в число базовых точек.
Шаг 5. Проверка выполнения критерия достижения заданной точности решения
задачи (1). Если заданная точность решения задачи (1) достигнута, то решение,
найденное на предыдущем шаге, принимается за решение исходной задачи (1), и
итерации оканчиваются. В противном случае происходит переход к первому шагу
основного этапа.
Сходимость. Критерий останова алгоритма
Для любого итерационного алгоритма крайне важными являются вопрос об
условиях сходимости и тесно связанный с ним вопрос о критерии останова алгоритма. Решение этих вопросов обычно базируется на понятии расстояния между двумя
приближениями.
Пусть a * есть решение задачи (1). Тогда можно выделить [2, 8] локальные экстремумы функции (a* , x) , т.е. объединения концевых точек x min , x max и точек, в
которых
(a * , x)
0 , i 1; M M , x [ x min , x max ] .
x
x xi
Пронумеруем эти точки в порядке невозрастания значений функции (a * , x) в
них: (a * , xi ) (a * , x j ) для любых i, j 1; M M ; i j . Тогда для первых M штук
этих точек ( 1 M M M ) выполняется условие
(a * , x) * ,
j 1; M ,
(3)
j M 1; M M .
(4)
а для остальных последующих
(a * , x j ) * ,
В работах [1, 2, 8] достаточно всесторонне изучены свойства локальных экстремумов. Показано, что в большинстве практически важных случаев для (3) выполняется условие альтернанса M n 1 . Показано, что выполнение условия альтернанса
позволяет свести исходную задачу (1) к задаче математического программирования.
В общем случае условие (3) не является достаточным признаком решения. Общий достаточный признак строгого локального экстремума в точке a * состоит в
строгой положительности производной от функции I (a ) в этой точке по всем допустимым направлениям
min
g ; g 1
28
I (a)
g
0 , или
g
из конуса допустимых направлений
[2, 8]:
( a , x )
i
min max
,g 0,
(5)
g ; g 1 i 1; M
a
где выражение в круглых скобках означает скалярное произведение векторов,
евклидова норма.
Таким образом, если вместо функции ( a, x ) используется её приближение
l
~
( a, x ) , совпадающее с ( a, x ) на некотором множестве базовых точек a , l 1; N ,
~
в том числе в базовой точке k [1; N ] , в которой для приближения ( a, x ) выполняется условие, аналогичное (5):
~
(a, xi )
min max
,g 0,
(6)
g ; g 1 i 1; M
a
то эта базовая точка является решением исходной задачи (1) при условии, что про~
изводные от ( a, x ) по параметрам управления приближают соответствующие производные от точного ( a, x ) в окрестности базовых точек на конусе допустимых
направлений хотя бы с точностью до знака. Очевидно, данное требование является
крайне мягким.
Этот вывод показывает возможность решения исходной задачи путём проведения итераций, в ходе которых происходит рассмотрение соответствующей приближённой задачи с уточнением приближения на каждой последующей итерации и отслеживанием близости к искомому решению по степени выполнения условий (3).
Для конкретизации критерия близости очередного приближения к искомому
решению задачи рассмотрим вариации a решения a * . Очевидно, что при вариации в некоторой окрестности точки решения задачи a * координаты точек локальных экстремумов будут изменяться. При значительной вариации могут появляться
дополнительные экстремумы функции (a * a, x) или исчезать некоторые из (3),
(4). Область, для которой количество экстремумов функции ( a, x ) и порядок их
чередования остаётся неизменным и соответствующим количеству экстремумов и
порядку их чередования функции (a* , x) , будем называть областью локализации
решения.
l
Пусть полученное на некоторой итерации решение a находится в области ло*
кализации решения исходной задачи a . Пусть для точек локального экстремума
l
x j , j 1; n 1 поля (a , x) установлено, что именно в них будут выполняться
условия альтернанса. Тогда в точках выполнения альтернанса для минимизируемого
поля (a, x j ) , j 1; n 1 в линейном приближении имеем
l
l
(a, x j ) (a , x j ) Alj (a a ) , j 1; n 1 , где Alj , есть вектор чувствитель29
ности поля в j -той точке выполнения альтернанса к вариации параметров управле (a, x j ) (a, x j ) x j
ния с компонентами
ai
x j
ai
, i 1; n . Тогда решение исход l
a a
*
ной задачи нахождения a может быть найдено как решение линейной системы
l
*
l
l
l
sgn( (a , x j )) Alj a * sgn( (a , x j )) Alj a (a , x j ) , j 1; n 1 ,
(7)
где * – значение максимального отклонения в точке решения. Вычитая из каждого
*
уравнения системы (7), например, последнее, получаем систему для нахождения a :
*
l
l
l
Ajl a Ajl a (a , x j ) ( a , xn1 ) , j 1; n ,
(8)
где Ajl Alj Anl 1 – якобиан системы (8) .
Для поиска следующего приближения согласно разработанному алгоритму
функция ( a, x ) заменяется на приближённую, восстановленную по ранее вычис~
ленным точкам функцию ( a, x ) . Соответственно, вместо задачи (8) рассматривается задача
l
l
l
~
~
Ajl a~ * Ajl a (a , x j ) (a , xn1 ) , j 1; n ,
(9)
~
~
~
~
где Ajl A lj Anl 1 – якобиан системы (9), A lj есть вектор чувствительности экстра-
полянта поля в j -той точке выполнения альтернанса к вариации параметров управ~
~
(a, x j ) (a, x j ) x j
ления с компонентами
, i 1; n . Решение системы
ai
x j
ai l
a a
*
l 1
~ a для решения системы (8).
(9) и даёт следующее приближённое значение a
Сравнение линейных систем (8) и (9) позволяет получить [9] при некоторых до~
полнительных требованиях, предъявляемым к матрицам A l и A l , оценку сверху
относительной погрешности получаемого приближенного решения в какой-либо
векторной норме:
*
*
a~ a
( Al )
(10)
,
*
1 ( Al )
a
( A l )
~
Al Al
где
есть
число
обусловленности
матрицы
A l
системы
(8),
Al – относительное отклонение приближённого якобиана от точно-
го в норме, согласованной с выбранной векторной нормой. Выражение (10) не может быть использовано для оценки точности полученного приближения, но оно позволяет предъявить дополнительные требования к используемому приближению
~ l
( a , x ) . В частности видно, что сходимость определяется точностью матрицы первых производных в окрестностях опорных точек. Для сходимости достаточно, чтобы
30
выражение, стоящее в правой части (10), было меньше единицы. Этого можно добиваться как получением и использованием более точных приближений матрицы A l ,
так и, в какой-то степени, снижением числа обусловленности этой матрицы. Кроме
того, видно, что если очередная итерация основного этапа алгоритма требует большого шага, при котором может быть получено большое значение ошибки , то возможны два следующих решения: искусственное уменьшение величины шага до разумного приемлемого значения или выполнение шага требуемой величины. В первом случае происходит продвижение алгоритма в нужном направлении, уточнение
приближения и, возможно, улучшение решения. Во втором случае происходит уточнение приближения в большей области с меньшей гарантией получить улучшенное
решение.
Согласно исследуемому алгоритму, следующим шагом будет обращение к модели и получение точного значения функции ( a
l1
, x ) . Значения (a
l 1
,xj),
j 1; n 1 соответствуют точному решению системы (7). Соответственно, вектор
с компонентами j (a
l 1
, x j ) ~ * , j 1; n 1 является невязкой решения систе-
мы (7). Тогда справедлива оценка в какой-либо векторной норме [9]
l
a a
a
*
*
(l )
b
,
(11)
где матрица l есть матрица коэффициентов при неизвестных в левой части системы (7), вектор b есть вектор правой части системы (7), матричная норма является
согласованной с выбранной векторной нормой.
Из выражения (11) видно, что относительная ошибка решения системы на очередной итерации для системы с хорошо обусловленной матрицей соизмерима с относительной величиной невязки. В случае плохо обусловленных систем ошибка
приближённого решения может быть значительной даже при небольшой невязке.
Кроме того, полученные оценки являются оценками сверху, способны гарантировать
требуемую точность, но могут оказываться весьма грубыми.
Оценки (10) и (11) являются априорной и апостериорной оценками сверху решения, полученного на очередной l -той итерации основного этапа. Величина (11)
может быть использована для оценки достигнутой точности очередной итерации и
формирования критерия останова итераций.
На основе (11) можно формировать другие конструктивные оценки, не гарантирующие жёстко требуемой точности, но достаточно эффективные и являющиеся более простыми в использовании. Примером такой оценки может быть величина
K a max j .
j 1;n1
Оценку сходимости предлагаемого алгоритма вблизи точки оптимума позволяет
получить сравнение с многомерным методом секущих решения систем уравнений. В
случае, когда для построения приближения ( a, x ) используется n 1 базовая точка, данный алгоритм при условии выполнения альтернанса совпадает с методом секущих решения систем уравнений, который имеет линейную сходимость. При использовании большего числа базовых точек скорость сходимости, по крайней мере,
31
не уменьшается, процесс устойчив из-за учёта достаточно большого количества учитываемых точек, что не позволяет «сплющиваться» области поиска в отличие от
многомерного метода секущих.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Рапопорт Э.Я. Оптимизация процессов индукционного нагрева металла. – М.: Металлургия, 1993. –
279 с.
2. Рапопорт Э.Я. Альтернансный метод в прикладных задачах оптимизации. – М.: Наука, 2000. – 336 с.
3. Duchon J. Splines minimizing rotation-invariant semi-norms in Sobolev spaces // Constructive theory of
functions of several variables. – Berlin, 1977. – P. 85-100.
4. Meinguet J. Multivariate Interpolation at Arbitrary Points Made Simple // ZAMP. – 1979. – V. 30. – № 2.
– P. 292-304.
5. Василенко В.А. Сплайн-функции: теория, алгоритмы, программы. – Новосибирск: Наука, 1983. –
215 c.
6. Ашкеназы В.О. Сплайн-поверхности: Основы теории и вычислительные алгоритмы – Тверь: Тверской гос. ун-т, 2003. – 82 с.
7. Arcangéli R., López de Silanes M.C., Torrens J.J. Multidimensional Minimizing Splines: Theory and Applications. – Boston: Kluwer Academic Publishers, 2004. – 280 p.
8. Демьянов В.Ф., Малоземов В.Н. Введение в минимакс. – М: Наука, 1972. – 368 с.
9. Хорн Р., Джонсон Ч. Матричный анализ. – М.: Мир, 1985-1989. – 655 с.
Статья поступила в редакцию 17 июня 2009 г.
UDC 519.6
ALGORITHM OF SPLINE EXTRAPOLATION FOR SOLUTION
OF SEMI-INFINITE OPTIMIZATION PROBLEMS
A.P. Efimov1
Samara State Technical University,
244, Molodogvardeyskaya str., Samara, 443100
The algorithm of the numerical solution of semi-infinite optimization problems is proposed.
This algorithm is based on extrapolation of minimized field on each iteration that allows reducing a number of references to models' calls. It is suggested to use pseudo-cubic splines as
an extrapolant. Efficiency of the given approach is shown.
Keywords: semi-infinite optimisation, numerical methods, iterations, convergence, extrapolation, Dm-splines, pseudo-cubic splines.
1
32
Aleksandr P. Efimov – Candidate of Technical Sciences, Associate professor.
УДК 681.3.07
АЛГОРИТМЫ РАЗДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ СИГНАЛОВ
НА ОСНОВЕ МНОГОКАНАЛЬНОЙ ОБРАТНОЙ ФИЛЬТРАЦИИ
В.А. Засов, М.А. Тарабардин, E.Н. Никоноров1
Самарский государственный университет путей сообщения,
443066, Самара, Первый Безымянный пер.,18
В работе рассматривается задача разделения сигналов из аддитивной смеси по принадлежности источникам и компенсации искажений, вносимых в них информационными каналами. Для решения этой задачи предложены три группы алгоритмов на основе
нерекурсивной, рекурсивной и адаптивной многоканальной фильтрации.
Ключевые слова: информационный канал, разделение-восстановление сигналов, некорректная задача, многоканальный обратный фильтр, устойчивость, регуляризация.
Рассмотрим модель образования сигналов в объекте в виде линейной многомерной динамической системы с дискретным временем, имеющей k входов и d выходов.
_______
Входные сигналы Гs (i ) , i 0, M 1 , s 1, к (M – количество значений входного
сигнала), генерируемые узлами объекта, будем считать независимыми. Выходные
_______
___
сигналы up i, l , i 0, M 1 , p 1, d этой системы являются сигналами различных
датчиков. Положим, что каждый из d выходов такой многомерной системы связан со
всеми k входами информационными каналами с динамическим характеристиками
_____
___
__________
_
________
h ps (i, l ) , s 1, k , p 1, d , i 0, N 1 или H ps (n , l) , n 0, N 1 , где N – коли-
чество значений импульсных характеристик (ИХ) объекта. Вектор l l1 ,...,la показывает, что динамические характеристики объекта неизменны лишь на временных
интервалах, сравнимых с длительностью ИХ.
Тогда для принятых допущений модель образования измеренных сигналов
________
___
up i, l , i 0, M 1, p 1, d описывается следующими системами уравнений:
k M 1 s
Г g h1s i g , l u1 i, l ;
s 1 g 0
......................................................;
k M 1
Гs g hds i g , l ud i, l .
s 1 g 0
k s
1
Г n H1s n , l u n , l ;
s 1
.................................................;
k
sГ n H ds n , l ud n , l ,
s 1
(1)
где up n , l , sГ n и H ps n , l – Фурье-образы функций иp (i, l ) , Гs (i ) и
________
________
___
___
h ps (i, l) соответственно, i 0, M 1 , n 0, N 1 , s 1, k , p 1, d .
1
Засов Валерий Анатольевич – кандидат технических наук, доцент.
e-mail: vzasov@samiit.ru
Тарабардин Михаил Анатольевич – старший преподаватель.
Никоноров Евгений Николаевич – аспирант.
33
________
________
Определение сигналов Гs i , i 0, M 1 по сигналам up i, l , i 0, M 1 и ИХ
_______
___
___
h ps i, l , i 0, N 1 , s 1, k , p 1, d будем называть разделением-восстановлением, а
устройства, реализующие его, – многоканальными обратными фильтрами (МОФ).
Таким образом, функцию МОФ можно определить как вычисление вектора
i, l i, l ,..., i, l , i 0, M 1 и матрице ИХ:
входных сигналов ξ Г (i ) 1Г (i ),..., Гk (i ) , i 0, M 1 по известному вектору измеренных сигналов ξ и
1
u
d
u
h11i, l ......... h1k i, l
.........
.........
......... , i 0, N 1 .
hd 1 i, l ......... hdk i, l
Для того чтобы матрица, обратная указанной, была невырожденной, положим
d k . Тогда решение систем уравнений (1) можно представить следующим образом:
1Г n Q11n , l ......... Q1d n , l 1u n , l
.........
.........
......... ......... , n 0, N 1,
k
Г n Qk1 n , l ......... Qkd n , l ud n , l
(2)
где спектральная матрица Q n , l является обратной спектральной матрице
H11n , l ..........................
H1k n , l
H n , l .................. .......................... ................... , n 0, N 1 .
H d1 n , l .......................... H dk n , l
_______
Выражение (2) задает функцию МОФ для разделения-восстановления сигналов
[1]. Выделим три вида МОФ – нерекурсивные, рекурсивные и адаптивные, отличающиеся методами решения систем (1) и показателями эффективности.
Для оценки эффективности вычислительных устройств (ВУ) для разделениявосстановления сигналов используем следующие основные показатели: сложность,
быстродействие и точность. Сложность определяется объёмом вычислений и сложностью самой схемы устройства для разделения-восстановления. Точность удобно
представить как среднеквадратичную ошибку вычисления входных сигналов, т.е.
1
2
вp
E
M
M 1
p
u
i 1
2
i, l - up i, l .
Здесь иp (i, l ) – сигнал, полученный повторным искажением моделью объекта
k
результатов разделения-восстановления, равный up i, l Гs i * h ps (i, l ) , где
s
s 1
Г (i ) – результаты разделения-восстановления сигналов для s-ного узла объекта, а
h ps (i, l) , i 0, N - 1 , p 1, d – ИХ информационных каналов объекта. Символом *
обозначена операция дискретной свёртки, E – оператор математического ожидания.
Решение систем (1) характеризуется неоднозначностью и неустойчивостью из-за
некорректности задачи разделения-восстановления [2]. Для введения задачи в класс
34
корректных и обеспечения устойчивости решения предлагается использовать регуляризирующие фильтры и регуляризирующие функционалы Тихонова [4]. Сложность выбора метода регуляризации связана с объёмом имеющейся априорной информации об объекте. Если объем априорной информации об объекте достаточен
для введения задачи в класс корректных задач, предлагается использовать нерекурсивные и рекурсивные МОФ.
Функция и структура нерекурсивных МОФ определяется выражением (3), которое представляет результат решения системы (1) прямыми методами, т.е.
d M 1
1
up g , l q1 p i g , l
Г i
p 1 g 0
,
..........
..........
......................................
d M 1
k i
up g , l q kp i g , l
Г
p 1 g 0
(3)
где Гs (i) , i 0, M 1 – вычисленный сигнал-образ, являющийся некоторым прибли-
жением истинного сигнала Гs (i ) , i 0, M 1 в точке его зарождения.
В (3) qsp i, l
тральная матрица
1
N
N 1
2in
, s 1, k , p 1, k , причем спекN
Qn , l exp j
n 0
Qn , l H n , l
1
, а элементы спектральной матрицы
N 1
2jin
.
N
i 0
Функция и структура рекурсивного МОФ определяется выражением (4), представляющим результат решения систем (1) итерационными методами. Для (+1)-го
приближения сигнала s-ного источника получим:
H n , l определяются как H ps n , l
Гs ( 1)
h ps (i, l) exp
k
p
s
i и i , l Г ( ) (i ) h ps i , l h~ps i , l ,
s p
s 1
s p
_______
p 1, d , s 1, k , i 0, M 1 . (4)
Предел ˆГs i lim Гs ( ) i , s 1, k последовательности итераций является ре
шением системы. Сложность рекурсивного МОФ меньше, но для обеспечения
устойчивости требуется вводить дополнительные априорные ограничения.
Когда объём априорной информации об объекте недостаточен для введения задачи в класс корректных, предлагается использовать адаптивные МОФ (МАОФ) с
регуляризацией Тихонова, основанной на минимизации функционала
2
d M 1
k N 1
2
1
1
p
p
F (q) E
u i, l - u i, l p
q sp i, l .
d
M
p 1
i 0
s 1 i 0
Данный функционал минимизирует на основе критерия наименьших квадратов
норму невязки системы (2).
Упростить вычисление параметров фильтра можно путем реализации выражения, которое связывает векторы параметров перестраиваемого фильтра на по-
35
следующих qsp1 (i, l) и предыдущих qsp (i, l) шагах адаптации, т.е.
_______
q sp1 (i, l) q sp (i, l) 2 Fp (i ) (q ) ξ и (i, l) , s 1, k , p 1, d , i 0, N 1 .
Важнейшим, трудоемким и сложно автоматизируемым процессом является
выбор параметра регуляризации , минимизирующего ошибку σ в2 σ 2мет σ 2уст
решения задачи. При изменении параметра методическая составляющая ошибки σ в2 возрастает, а составляющая ошибки, связанная с неустойчивостью решения, убывает. Это дает основание для определения такого значения параметра 0 ,
при котором ошибка σ в2 будет минимальной. Для этого реализован быстро сходящийся итерационный метод, основой которого является метод половинного деления, позволяющий вычислить оптимальный параметр 0 , минимизирующий
σ в2 .
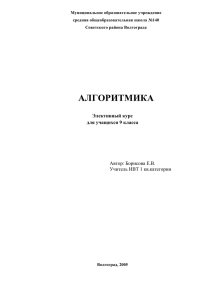
На рис. 1-3 приведены результаты моделирования в среде MATLAB нерекурсивного алгоритма разделения-восстановления сигналов. В модели были использованы три источника сигналов: первые два (см. рис. 1 и рис. 2) – треугольные
импульсы разной частоты и формы, а третий (см. рис. 3) – речевой сигнал.
Р и с. 1. Результаты моделирования разделения-восстановления
треугольного сигнала с помощью нерекурсивного МОФ
Девять информационных каналов моделировались различными резонансными
звеньями. В приемниках сигналов использовались 8-разрядные АЦП с частотой дискретизации 15 кГц. В верхней части каждого из рисунков показан исходный сигнал,
в средней части – сигналы с датчиков, а в нижней части – результаты выделения
36
каждого сигнала из смеси и восстановления его. Сравнительный анализ методом
среднего квадратичного отклонения верхнего и нижнего сигналов на каждом из рисунков показал, что погрешность разделения-восстановления сигналов не превышает 8-10%, что вполне достаточно для многих инженерных приложений.
Р и с. 2. Результаты моделирования разделения-восстановления
треугольного сигнала с помощью нерекурсивного МОФ
Р и с. 3. Результаты моделирования разделения-восстановления
речевого сигнала с помощью нерекурсивного МОФ
37
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
Архангельский С.В., Засов В.А. Многоканальные восстанавливающие фильтры в задачах контроля и диагностики // Вестник Самарской госуд. академии. путей сообщения. – 2004. – №2. – С.28-32.
Василенко Г.И. Теория восстановления сигналов: О редукции к идеальному прибору в физике и технике. – М.:
Сов. радио, 1979. – 272с.
Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. – М.: Наука. Глав. редакция физ.-мат. лит-ры,
1979. – 234 с.
Статья поступила в редакцию 19 февраля 2009 г.
UDC 681.3.07
THE ALGORITHMS OF SEPARATION AND RESTORING SIGNALS BASED
ON MULTICHANNEL INVERSE FILTRATION
V.A. Zasov, M.A. Tarabardin, E.N.Nikonorov.1
Samara State Railway University.
18, 1st Bezimyanniy sade street., Samara, Russia.
The problem of signal separation in additive mix (signal identification) and restoring them is
considered in this work. There are three groups of algorithms to decision this task that analyzed in this article: based on the non-recursive, recursive and adaptive multichannel filters.
Keywords: information channel, signal separation and restoring, incorrect problem, multichannel inverse filter, stability, regularization.
1
38
Valeriy A. Zasov – Candidate of Technical Sciences, Associate professor.
e-mail: vzasov@samiit.ru
Mihail A. Tarabardin – Senior Lecture.
Evgeniy N. Nikonorov – Postgraduate student.
УДК 007, 336.76
МЕТОД ОЦЕНКИ И ВЫБОРА АЛГОРИТМА ПРИНЯТИЯ
ИНВЕСТИЦИОННЫХ РЕШЕНИЙ НА ОСНОВЕ
ЕГО ПАРАМЕТРИЧЕСКОЙ ОПТИМИЗАЦИИ
В.Г. Саркисов, Г.А. Саркисов1
Самарский государственный технический университет,
443100, Самара, ул. Молодогвардейская, 244
Рассматривается вопрос сравнения алгоритмов принятия инвестиционных решений.
Для объективного сравнения алгоритмов авторы вводят функционалы, позволяющие
охарактеризовать алгоритм набором чисел. Исследуются стабильность, эффективность и риск применения алгоритмов. Авторы используют ретроспективное тестирование для обоснованного прогнозирования характеристик алгоритма. Приводятся примеры использования нескольких систем принятия решений для разных инструментов
российского фондового рынка, подтверждающие эффективность предлагаемого метода оценки и выбора алгоритма.
Ключевые слова: алгоритм, инвестиционные решения, параметрическая оптимизация,
прогнозирование эффективности, ретроспективное тестирование.
На современном этапе развития экономики России многие инвесторы столкнулись с потерей эффективности систем принятия инвестиционных решений (СПР).
Системы, ранее стабильно приносившие прибыль, стали приносить убытки. Такие
ситуации показывают важность исследований стабильности результатов работы
СПР.
СПР может быть представлена в виде иерархической структуры:
1) алгоритм – набор правил по определению долей финансовых инструментов
в инвестиционном портфеле в каждый момент времени;
2) элементы алгоритма – формулы, условия, вычислительные процедуры и
прочие, к которым применяется последовательность действий, определяющая алгоритм;
3) структура вектора параметров – названия и физический смысл числовых
параметров элементов алгоритма.
Например, рассматривается СПР на фондовом рынке, в которой принятие решений о покупке (продаже) акций принимается в момент пересечения двух скользящих
средних (с разными периодами) от цены акции [1]. Вектор параметров содержит периоды скользящих средних. Элементами алгоритма являются формулы для вычисления значений скользящих средних. Алгоритм состоит из двух правил: покупать,
когда первая скользящая средняя пересекает вторую снизу вверх, и продавать при
обратном пересечении.
Оптимизация алгоритма состоит в расширении элементной базы и выборе сочетаний элементов и последовательности действий над ними.
Однозначное сравнение алгоритмов становится возможным, если выбранный
1
Саркисов Виген Геннадьевич – кандидат технических наук, доцент.
e-mail: vigen.sarkisov@mail.ru
Саркисов Геннадий Арсенович – кандидат технических наук, доцент.
e-mail: gennad.sarkisov@mail.ru
39
критерий ставит в соответствие каждому алгоритму действительное число, т.е. является функционалом.
Классический подход [1, 3] к выбору алгоритма состоит в проведении численной процедуры параметрической оптимизации для каждого из алгоритмов по некоторой известной выборке цен (или доходностей) инвестиционных инструментов:
Ri* max R Ai X , t0 , t N ,
(1)
X
где Ai X – i-тый алгоритм с вектором параметров X x1 , x2 ,..., xk ; t0 – начало выборки; tN – конец выборки; R Ai X , t0 , t N – доходность портфеля, формируемого iтым алгоритмом с вектором параметров X на временном отрезке t0 , t N .
Каждому алгоритму ставится в соответствие действительное число Ri* – доходность алгоритма, показанная на отрезке t0 , t N при оптимизированных параметрах.
После оптимизации выбирается алгоритм, показавший наибольшую доходность:
A* Am : Rm* max Ri* .
(2)
i
Данный подход основывается на предположении, что алгоритм, давший хороший результат в прошлом, будет с большой вероятностью давать хорошие результаты и в будущем.
Формальное следование процедуре (1), (2) приводит к созданию различных алгоритмов с очень большим количеством элементов и параметров, которые тем или
иным образом производят аппроксимацию данных из выборки. Это явление называется "переподгонкой" ("overfitting"). Такие алгоритмы обычно показывают хорошие
результаты на периоде t0 , t N , но оказываются неработоспособными даже при относительно небольших отличиях характеристик динамики реальных цен от тех, на которых производилась оптимизация.
Таким образом, алгоритм, оптимальный с точки зрения (2), обычно непригоден
для реального использования. Рассмотренная процедура не дает возможности корректно сравнивать алгоритмы с точки зрения их реальной применимости.
Можно попытаться по аналогии с (1) дать оценку доходности снизу путем подбора наихудших возможных параметров:
Ri* min R Ai X , t0 , t N .
X
(3)
Этот подход приводит к неадекватно низкой эффективности любой СПР. Такая
оценка является сильно заниженной и имеет ограниченную практическую ценность,
так как при реальной инвестиционной деятельности параметры выбираются не абсолютно случайно, а некоторым образом оптимизируются.
Авторы предлагают осуществлять реализацию критерия в виде функционала c
помощью следующей процедуры оптимизации.
Исследуемый временной период цен t0 , t N разбивается на N интервалов
t j 1, t j ,
j 1, N .
Для алгоритма Ai находятся векторы параметров X i*, j , доставляющие максимум
доходности на каждом из интервалов:
X i*, j arg max R Ai X , t j 1, t j , j 1, N .
X
(4)
Для каждого из полученных векторов вычисляется эффективность алгоритма на
40
каждом из временных отрезков:
Ri, j , k R Ai X i*, j , tk 1, tk , j 1, N , k 1, N ,
(5)
где j – номер интервала, на котором оптимизируется набор параметров, а k – номер
интервала, где этот набор применяется.
Формула (5) позволяет охарактеризовать каждый алгоритм Ai множеством значений элементов квадратной матрицы доходностей СПР на каждом интервале времени при значениях вектора параметров, оптимизированных на других интервалах:
Ri ,1, 2
...
Ri ,1, N
Ri ,1,1
Ri , 2, 2
...
Ri , 2, N
Ri , 2,1
.
(6)
Ri
...
...
...
...
R
R
...
R
i
,
N
,
1
i
,
N
,
2
i
,
N
,
N
Сравнительный анализ матриц Ri,j,k для разных алгоритмов дает возможность
объективно сопоставить эффективность и риск использования каждого алгоритма в
реальных условиях и произвести обоснованный выбор.
Сформулированы три варианта критерия качества алгоритма:
1) средневзвешенный критерий;
2) критерий риска, основанный на принципе гарантированного результата;
3) критерий оценки стабильности результатов.
Основным различием предлагаемых критериев является способ вычисления значения критерия по матрицам Ri,j,k.
Средневзвешенный критерий
В качестве показателя качества i-того алгоритма выбирается среднее значение
из множества Ri,j,k:
I ср i
N N R
1
i, j ,k , j k;
N N 1 j 1 k 1 0, j k.
(7)
Значения доходности при j = k исключаются из рассмотрения, поскольку эти
значения доходности получены на тех же участках, где производилась оптимизация
вектора параметров. Таким образом, исключается "переподгонка".
Критерий (7) оценивает среднюю доходность алгоритма при его использовании
на всех рассматриваемых интервалах. Такая оценка позволяет предполагать, что в
будущем доходность при использовании этого алгоритма будет близка к (7).
Критерий риска, основанный на принципе гарантированного результата
В качестве показателя качества i-того алгоритма выбирается наименьшее значение из множества Ri,j,k:
I гр i min Ri, j , k , j 1, N , k 1, N .
(8)
j,k
Данный подход позволяет оценить поведение СПР с i-тым алгоритмом при максимально неудачном выборе сочетания временного интервала оптимизации параметров (j) и временного участка (k), на котором используется алгоритм.
Идеологически этот подход близок к (3), но с тем отличием, что на значения
вектора параметров накладываются дополнительные ограничения. Они позволяют
исключить из рассмотрения те значения вектора, которые никогда не были бы при41
менены на практике и, следовательно, не повлияли бы на реальную эффективность
СПР.
Критерий оценки стабильности результатов
Рассмотрим отношение 1 Ri, j , k
1 Ri,k ,k , где R
i,k,k
– доходность i-того алго-
ритма на k-том временном интервале с вектором параметров X*i,k, оптимизированным на этом же интервале, а Ri,j,k – доходность на том же интервале этого же алгоритма, но с вектором параметров X*i,j, оптимизированным уже на другом (j-том) интервале.
Очевидно, что это отношение всегда меньше или равно единице. Чем ближе отношение к единице, тем эффективнее использование вектора параметров X*i,j на kтом интервале. Если рассматриваемое отношение близко к единице для любой пары
участков k и j, то доходность имеет низкую чувствительность к выбору временного
интервала оптимизации вектора параметров. Это дает существенные основания
предполагать, что и в дальнейшем использование такого алгоритма будет приносить
стабильную доходность.
Показателем стабильности алгоритма в целом может служить усредненное значение рассмотренного отношения по всем интервалам оптимизации параметров (j) и
интервалам применения алгоритма (k):
1 Ri , j , k
N N
,i j
1
.
(9)
I ст i
1 Ri , k , k
N N 1 k 1 j 1
0, i j
Обобщенный критерий качества алгоритма
Сочетание всех трех предложенных критериев дает разностороннюю оценку качества алгоритма с точек зрения доходности, риска и стабильности работы. Таким
образом, каждый алгоритм оказывается охарактеризованным тремя числами. На основании личных предпочтений между доходностью, риском и стабильностью работы алгоритма инвестор может сформировать свой обобщенный критерий качества
алгоритма, являющийся функций трех рассмотренных критериев.
Подходы к постановке и решению таких многокритериальных задач оптимизации являются предметом специальных исследований и хорошо освещены в литературе [5-8].
Пример использования предлагаемых критериев
В качестве исходных данных для примера рассматривалась динамика цен российских акций за период с начала 2000 до конца 2007 года. Были выбраны три
наиболее ликвидные акции – обыкновенные акции ОАО ГМК «Нор.Никель»
(GMKN), ОАО НК «ЛУКОЙЛ» (LKOH) и АК «Сберегательный банк РФ» (SBER).
Для демонстрации расчета критериев выбраны три достаточно простых и широко известных алгоритма принятия решений, основанные:
1) на пересечениях двух скользящих средних цены (алгоритм А1);
2) на пересечениях индикатора MACD [2] и его скользящей средней (алгоритм А2);
3) на системе индикаторов направленного движения – Directional Movement
42
System [2] (алгоритм А3).
Введен простейший обобщенный критерий:
I I ср I гр I ст .
(10)
Для каждого алгоритма и каждой акции в соответствии с (5) и (6) была проведена оптимизация и по ее результатам составлена матрица (7). При ее составлении
были выбраны интервалы длительностью 1 год (2000-2003 годы). Далее приводятся
полученные матрицы для каждой из акций и алгоритмов и соответствующие значения критериев (табл. 1-3).
Расчет значений критериев для акций GMKN
Результаты оптимизации параметров алгоритма, основанного на пресечениях
скользящих средних (А1), на акциях GMKN за 2000-2003 годы:
R1,1,1 R1,1, 2 R1,1,3 R1,1, 4 0,49 0,23 0,05 0,36
0,13 1,17
R1, 2,1 R1, 2, 2 R1, 2,3 R1, 2, 4 0,29 2,73
(11)
R1
.
R1,3,1 R1,3, 2 R1,3,3 R1,3, 4 0,16 1,67
0
,
40
1
,
48
R
0,10
R
R
R
2
,
14
0
,
10
1
,
91
1
,
4
,
1
1
,
4
,
2
1
,
4
,
3
1
,
4
,
4
Аналогично найдены матрицы R2 и R3 для алгоритмов, основанных соответственно на пересечениях MACD и его скользящей средней (А2) и на системе индикаторов направленного движения (А3):
0,48
0,19
R2
0,03
0,14
0,03 1,01
2,60 0,07 1,23
;
1,29 0,40 1,24
1,36 0,25 1,53
2,12
0,84 0,45
0,15 1,46
R3
0,14 1,18
0,60 0,67
(12)
0,18 0,36
0,09 0,35
.
0,79 0,75
0,09 1,03
(13)
По найденным матрицам Ri получены значения критериев для периода, где проводилась оптимизация (2000-2003 годы). Для оценки прогнозирующих свойств критериев их значения вычислены также на периоде с 2004 по 2007 год включительно.
При этом важно, что на периоде с 2004 по 2007 год использовались значения параметров алгоритмов, оптимизированные за 2000-2003 годы. Результаты расчета критериев для алгоритмов А1, А2 и А3 приведены в табл. .
Таблица 1
Значения критериев для акций GMKN
Критерий
Iср
Iгр
Iст
∑
А1
0,53
-0,29
0,66
0,90
2000-2003 годы
А2
0,73
-0,07
0,77
1,42
А3
0,42
0,09
0,70
1,20
А1
0,32
-0,30
0,80
0,82
2004-2007 годы
А2
0,29
-0,27
0,78
0,80
А3
0,14
-0,31
0,85
0,68
43
Алгоритм А2 показал наибольшее значение обобщенного критерия на отрезке
времени с 2000 по 2003 год, обладая наивысшей среди рассматриваемых алгоритмов
доходностью Iср и стабильностью Iст. С 2004 по 2007 год алгоритм А2 показал
наименьший возможный убыток Iгр и лишь немного уступил алгоритму А1 по доходности Iср, существенно опередив при этом алгоритм А3.
Таким образом, прогнозные свойства критериев подтвердили их приемлемость
для оценки результатов работы алгоритмов в будущем.
Расчет значений критериев для акций LKOH
Результаты оптимизации параметров алгоритмов А1, А2, А3 на акциях LKOH за
2000-003 годы:
0,24 0,51 0,00 0,30
0,16 0,74 0,10 0,03
R1
(14)
0,34 0,27 0,38 0,15
0,02 0,67 0,04 0,58
0,20
0,15
R2
0,17
0,27
0,47
0,12
R3
0,12
0,15
0,16
0,50 0,10 0,35
0,26 0,36 0,15
0,49 0,04 0,40
0,24 0,34
(15)
0,09
0,49 0,07 0,02
0,04 0,22
0,12
0,07 0,06 0,19
0,00
0,13
(16)
Результаты расчета критериев для алгоритмов А1, А2 и А3 приведены в табл.2.
Таблица 2
Значения критериев для акций LKOH
Критерий
Iср
Iгр
Iст
∑
А1
0,13
-0,34
0,76
0,55
2000-2003 годы
А2
0,16
-0,27
0,84
0,73
А3
0,05
-0,09
0,78
0,73
А1
0,14
-0,22
0,73
0,65
2004-2007 годы
А2
0,25
-0,12
0,84
0,96
А3
0,17
-0,05
0,84
0,96
Алгоритмы А2 и А3 показали примерно одинаковое значение обобщенного критерия на отрезке времени с 2000 по 2003 год. А2 оказался лучше по доходности Iср и
стабильности Iст, А3 – лучше по риску Iгр. Эта же тенденция сохранилась и на периоде с 2000 по 2004 годы.
Алгоритм А1, показавший худшие результаты по обобщенному критерию в
2000-2003 годах, оказался наихудшим и в 2004-2007 годах.
44
Расчет значений критериев для акций SBER
Результаты оптимизации параметров алгоритмов А1, А2, А3 на акциях SBER за
2000-003 годы:
0,04 0,10 0,06 0,07
0,44 2,68 1,22 0,23
R1
(17)
0,08 1,80 1,92 0,01
0,39 2,27 1,26 0,41
0,08
0,42
R2
0,14
0,39
0,16
2,39 0,87 0,32
1,90 1,51 0,04
1,30 0,85 0,40
(18)
0,11
0,22
R3
0,35
0,25
0,52 0,64 0,19
1,38 0,67 0,18
0,76 1,12 0,11
1,13 0,75 0,33
(19)
1,88
1,04
Результаты расчета критериев для алгоритмов А1, А2 и А3 приведены в табл. .
Таблица 3
Значения критериев для акций SBER
Критерий
Iср
Iгр
Iст
∑
А1
0,49
-0,44
0,67
0,73
2000-2003 годы
А2
0,62
-0,42
0,76
0,96
А3
0,34
-0,35
0,81
0,80
А1
0,45
-0,16
0,75
1,05
2004-2007 годы
А2
0,49
-0,03
0,87
1,33
А3
0,24
-0,17
0,83
0,90
Алгоритм А2 показал наибольшее значение обобщенного критерия на отрезке
времени с 2000 по 2003 год. Он же стал лучшим за 2004-2007 годы и по доходности
Iср , и по риску Iгр.
Заключение
По всем трем рассмотренным акциям (GMKN, LKOH, SBER) алгоритм, показавший лучшие результаты по обобщенному критерию за прогнозируемый период
(2000-2003 годы), оказался наилучшим (или близким к наилучшему) и для следующих лет (2004-2007).
Введение и анализ критериев, разносторонне оценивающих работу алгоритмов,
позволили формировать более надежные суждения относительно преимуществ и
недостатков алгоритмов при работе в последующие периоды времени.
45
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. ЛеБо Ч., Лукас Д.В. Компьютерный анализ фьючерсных рынков: Пер. с англ. – М.: Издательский
дом "Альпина", 2000. – 304 с.
2. Колби Р.В., Мейерс Т.А. Энциклопедия технических индикаторов рынка: Пер. с англ. – М.: Издательский дом "Альпина", 2000. – 581 с.
3. Babcock B. The Correct Way To Optimize Commodity Trading Systems. // Traders World Magazine. –
1989. – №3.
4. Саркисов В.Г. Постановка задачи оптимального управления инвестиционным портфелем // Вестник
СамГТУ. Сер. Технические науки. – 2006. – №40. – С. 42-50.
5. Ларичев О.И. Теория и методы принятия решений. – М.: Логос, 2000.
6. Подиновский В.В., Ногин В.Д. Парето-оптимальные решения многокритериальных задач. – М.:
Наука, 1982.
7. Штойер Р. Многокритериальная оптимизация: теория, вычисления и приложения. – М.: Радио и
связь, 1992.
8. Кини Р.Л., Райфа Х. Принятие решений при многих критериях: предпочтения и замещения. – М.:
Радио и связь, 1981.
Статья поступила в редакцию 10 марта 2009 г.
UDK 007, 336.76
AN INVESTMENT DECISION MAKING ALGORITHM RATING
AND SELECTION METHOD BASED ON PARAMETRIC OPTIMIZATION.
V.G. Sarkisov, G.A. Sarkisov1
Samara State Technical University,
244, Molodogvardeyskaya str., Samara, 443100
Investment decision making algorithm comparison issue is considered. For the unbiased algorithm comparison the authors introduce the functionals that let an algorithm be characterized
by a set of numbers. Algorithm stability, effectiveness and risk of application are investigated.
The authors use retrospective testing for the well-grounded forecasting of algorithm characteristics. There are drawn examples of using some decision making systems for various instruments of the Russian stock market, proving the efficiency of the proposed algorithm evaluation
and selection method.
Key words: algorithm, investment decision, parametric optimization, effectiveness forecasting,
retrospective testing.
1
46
Vigen G. Sarkisov – Candidate of Technical Sciences, Associate professor,
e-mail: vigen.sarkisov@mail.ru
Gennadiy A. Sarkisov – Candidate of Technical Sciences, Associate professor,
e-mail: gennad.sarkisov@mail.ru