Затверджено - Криворізький національний університет
реклама

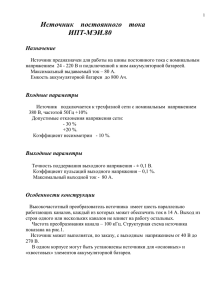
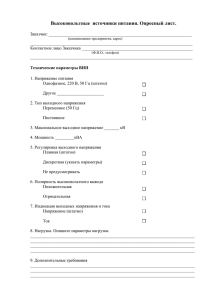
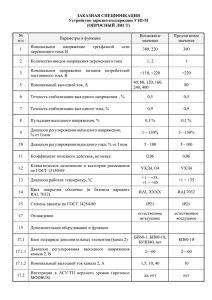
Міністерство освіти і науки України ДНВЗ «Криворізький національний університет» Кафедра електропостачання та енергетичного менеджменту Методичні вказівки до виконання стендових лабораторних робіт курсу "Промислова електроніка та мікропроцесорна техніка" Частина 2 для студентів напряму 050701 “Електротехнічні системи електроспоживання". Затверджено на засіданні кафедри ЕПЕМ протокол № 1 від 29.08.2013 р. Кривий Ріг - 2013 Укладач: Щокін В.П., д-р техн. наук, професор Відповідальний за випуск: Щокін В.П., д-р техн. наук, професор Рецензент: Толмачов С.Т. , д-р техн. наук, професор Дисципліна “Промислова електроніка та мікропроцесорна техніка” посідає особливе місце серед дисциплін, які викладаються для спеціальності 050701 “Електротехнічні системи електроспоживання". Цей курс вивчає елементну базу сучасної техніки, автоматизації виробничих процесів, пристроїв що випрямляють електричний сигнал електроживлення та управління, обчислювальних машин та різноманітних електротехнічних пристроїв. На основі курсів математики, фізики та теоретичних основ електротехніки, студент опанує теорію і практику застосування електронних приладів, схем, пристроїв, систем і пристосувань. Прикладний /технічний/ характер курсу «Промислова електроніка та мікропроцесорна техніка» визначає цикл лабораторних робіт в яких досліджуються електронні пристроїв, проводиться їх наладка та виміри характеристик і параметрів. Друга частина лабораторних робіт орієнтована на застосування сучасного програмного забезпечення Electronics Workbench та Micro-Cap V для комп’ютерного дослідження. Методичні вказівки складені таким чином, щоб студент отримав можливість ознайомитись з найбільш глибоким і досконалим методом вирішення багатьох проблем і задач різних галузей науки і техніки. Застосування вказівок дозволяє навчити студентів не тільки розробкам і проектуванню функціонально завершених пристроїв, але і більш глибоко освоїти принцип дії цих пристроїв, і оволодіти вміннями їх грамотної експлуатації. Розглянуто на засіданні кафедри електропостачання та енергетичного менеджменту Протокол № 1 від 29.08.2013 р. Схвалено на вченій раді електротехнічного факультету Протокол № 1 від 30.08. 2013 р. 2 СОДЕРЖАНИЕ: Стр. 1. Лабораторная работа № 1. Исследование импульсного усилителя 4 2. Лабораторная работа № 2. Исследование однополупериодных выпрями- 9 телей, и выходных фильтров. 3. Лабораторная работа № 3. Исследование двухполупериодных выпрями- 10 телей и выходных фильтров. 4. Лабораторная работа № 4. Исследование тиристора. 11 5. Лабораторная работа № 5. Исследование параметрического стабилиза- 13 тора напряжения. 6. Лабораторная работа № 6. Исследование компенсационного стабилиза- 16 тора напряжения. 7. Лабораторная работа № 7. Исследование стабилизатора тока на транзи- 18 сторе. 8. Лабораторная работа № 8. Исследование схемы амплитудной модуля- 20 ции. 9. Лабораторная работа № 9. Исследование схемы амплитудного детекто- 22 ра. 10. Лабораторная работа № 10. Исследование схемы частотного детектора. 24 11. Приложение А. ЭЛЕКТРИЧЕСКИЕ ИМПУЛЬСЫ И ИХ ПАРАМЕТРЫ 26 12. Приложение Б. ДИФФЕРЕНЦИРУЮЩИЕ ЦЕПИ 27 13. Приложение Б. ИНТЕГРИРУЮЩИЕ ЦЕПИ 29 3 ЛАБОРАТОРНАЯ РАБОТА № 1 Тема: исследование импульсного усилителя. Цель: ознакомиться с назначением и принципом расчета основных параметров импульсного усилителя. Изучить режим работы по постоянному току, исследовать осциллограммы при передаче синусоидального и импульсного сигнала. Ознакомиться с основными характеристиками АЧХ и АХ импульсного усилителя. Оборудование: ГН2, ГНЧ, ГПИ, ИВ, АВМ1, МВ, ЧМ, осциллограф. Съемные элементы: транзистор МП40, С1=С2=Сэ=20-50мкФ (условный выбор). Неуказанные элементы выбираются в соответствии с предварительным расчетом. Вводные значения: Uвх.и=0,4В, Uвых.и=5В, Rн=1,2кОм - 1 вариант, 1кОм - 2 вариант, 0,3кОм - 3 вариант. Теоретический материал: UВЫХ UВ U 0,9Uв ых.и Uв ых.и tи 0,1Uв ых.и t tф tс Рис. ЛР1.1 Оценка свойств усилителя, предназначенного для усиления импульсов произвольной формы, производится по его реакции на прямоугольный импульс (рис. ЛР1.1). Фронт выходного импульса в отличие от входного имеет конечную длительность у, называемую временем установления, которое определяется характеристиками усилительных каскадов на высоких частотах. Чем больше верхняя граничная частота fв, тем меньше у. Для уменьшения у используют методы высокочастотной коррекции. Спад плоской вершины импульса обусловлен снижением коэффициента усиления на низких частотах. Чем меньше нижняя частота, тем меньше . В свою очередь, частота fн зависит от емкостей разделительных и блокирующих конденсаторов. Для уменьшения спада вершины применяют специальную коррекцию частотной характеристики: схемным путем (разделением коллекторной нагрузки Rк1 и Rк2 и выводом от средней точки через емкостной элемент) уменьшают частоту fн; при этом, уменьшается усиление в зоне средних частот. На средних частотах, в связи с тем что емкостное сопротивление Ск выбирается много меньше Rк1, коэффициент усиления каскада, зависящий от сопротивления в коллекторной цепи, будет определяться только сопротивлением Rк2. На нижних частотах коэффициент усиления, с одной стороны, уменьшается за счет увеличения емкостных сопротивлений конденсаторов С1 и С2, а, с другой стороны, увеличивается за счет роста емкостного сопротивления Ск. Пусть на вход исследуемого каскада без коррекции поступает положительный импульс. Транзистор начинает закрываться и на нагрузке формируется передний фронт выходного импульса. Исходные напряжения на конденсаторах С1 и С2 эа это время практически не изменяются. С началом формирования плоской вершины начинают изменяться напряжения на конденсаторах так, что выходное напряжение – амплитуда импульса – уменьшается. Результирующий спад плоской вершины определяется формулой: / Um tИ / Э где Um – амплитуда выходного импульса; tИ – длительность импульса; Э – условная эквивалентная постоянная времени обеих разделительных цепочек, которая связана со значением нижней граничной частоты следующей формулой: Э 1/ 2fн 4 Срез (задний фронт) выходного импульса, так же как и передний, имеет конечную длительность С , называемую временем спада импульса. Расчет сопротивлений резисторов усилительного каскада для обеспечения режима усиления и соответствующей точки покоя. Алгоритм расчета для схемы приведенной на рис.ЛР1.2. -EK R1 R2 Рис.ЛР1.2. RК RЭ Дано: Ек(В), Rк(кОм). Статический коэффициент передачи тока (DC), коэффициент усиления КU и координаты рабочей точки Iк(мА), Uкэ(В) определяются по статическим входным и выходным характеристикам транзистора. Решение: 1) U Rk I K RK 2) Суммарное напряжение эмиттера: т.к. U КЭ E К U Rк U Э , то U Э EК U КЭ U Rк I 3) I Б К , DC 4) I Э I К I Б 5) при КU<11, KU RН R RЭ Н RЭ KU 6) U Rэ I Э RЭ 7) для стабильной работы схемы необходимо соблюдение условия: I R 2 (5 10) I Б . 8) U Б U Э U БЭ 0 , где U БЭ 0 (пороговое напяжение) получено из характеристики I ВХ f (U ВХ ) U 9) R 2 Б , I R2 E UЭ 10) R1 K . IК IR2 Расчет импульсного усилителя без коррекции. 1. Определение числа каскадов усиления по коэффициенту усиления тока базы h21э: h21ТРЕБ n U ВЫХ .И RВХ .Э kЗ U ВХ .И RН где Rвх.э h11э= 500-2000 Ом - входное сопротивление высокочастотных транзисторов.; kЗ=1,2-1,3 - коэффициент запаса; n - число каскадов. 2. Определение сопротивления Rk: обычно в импульсных усилителях определяют из соотношений: Rk(2-3)Rн при Rн 0,5кОм; Rk(1-2)Rн при Rн =0,5-1,0кОм. При этом сопротивление нагрузки переменному коллекторному току: RкRн R Н' Rк Rн 3. Длительность фронта импульса приходящегося на один каскад: t Ф' t Ф / n Импульс считается удовлетворительным, если: tфtс(0.1-0.2)tи 4. Определение предельной частоты транзисторного каскада: 5 - для однокаскадного усилителя и последнего каскада многокаскадного усилителя длительность фронта выходного импульса между уровнями (0,1-0,9)Uвых.и определяется выражением: t Ф 2.2 В 2.2 S R Н/ Cкh21э R Н/ C Н/ где S 1 / 2f S ; fS f h 21Э h11Э / r - граничная частота крутизны характеристики; Ск - емкость коллекторного перехода; R'н - сопротивление нагрузки переменному коллекторному току; С'н=Сн+См - емкость, учитывающая емкости нагрузки и монтажа. - для предварительных каскадов: t Ф 2.2 h 21Э R Н/ Cкh21э / Б где h 21Э 1 / 2f h 21Э . ! Пункты 1-4 необходимы для выбора транзистора и обоснования количества каскадов усиления. 5. Выбор емкостей конденсаторов усилителя, обеспечивающие допустимый спад вершины импульса. - распределяют относительный спад вершины импульса в соответствии с соотношением: Cэ Ср 1 3 4 Ср Ср Ср Импульс считается удовлетворительным, если: U / U ВЫХ .И 0,05 0,1 При этом находят: Ср / 5 так как емкости разделительных конденсаторов удобно выбирать в соответствии с равенством: Ср1=Ср2=С'р=Ср, значение емкости определяется по условию: 1 1 1 Ср tи ( Rи Rвх1) Cp( Rк1 Rвх 2) Cp( Rк 2 Rн ) Cp ВХ Ср1 Ср 2 откуда tи 1 1 1 Ср Ср Rи Rвх1 Rк1 Rвх 2 Rк 2 Rн последние формулы записаны с учетом двух каскадов усиления. где Rи - выходное сопротивление источника входного сигнала (2кОм); Rвх1 - входное сопротивление первого каскада: Rвх.эR1R 2 Rвх1 Rвх.эR1 Rвх.эR 2 R1R 2 - Относительный спад, приходящийся на конденсаторы Сэ, СЭ Ср . - Принимая емкости конденсаторов Сэ одинаковыми, вычисляют их по формуле: tи 1 1 СЭ Ср Rвх.б1 Rи (1 h21б ) Rвх.б 2 Rк1(1 h21б ) h h где Rвх.б1 11Э , h21б 21Э . h21Э 1 h21Э Расчет импульсного усилителя с коррекцией. 6 В импульсном усилителе с коррекцией добиваются уменьшения длительности фронтов в 1,3-1,4 раза. Схема с коррекцией приведена на рис.ЛР1.3. С учетом соотношения t Ф 2.2 h 21Э R Н/ Cкh21э длительность фронта импульса в усилителе с коррекцией можно представить в следующем h21э.треб t виде: tФ.КОР Ф 1,8 h 21Э Cк h21э RН/ 1,35 h21э Из последнего соотношения получим: 0,288 f h 21э tФ 1,8СкR Н/ h21э.треб - Ec Rф Cф Rк R1 Cр2 Cр1 + Uвых + R2 ГН R''э C''э R'э C'э Rн + + Рис.ЛР1.3. где tф.кор - заданная длительность фронта импульса в усилителе с коррекцией. При коррекции фронта импульса на его вершине может появиться выброс. Элементы ОС выбираются согласно выражениям: h21Э h21Э.треб k В ( RЭ// Rвх.б ) // / // RЭ h21б RН ; СЭ h21Э.треб h21Э RЭ/ Rвх.б где коэффициент k рекомендуется выбирать в пределах 2-3; В h21Э RН/ Ск (1 h21э ) , h21Э 1 / 2f h 21Э , RЭ/ RЭ RЭ// , R К RФ R . Емкость цепи коррекции вершины импульса рассчитывают по формуле: CФ н Rк , где н - постоянная времени схемы в области низких частот 1 н 1 С 'э С 'э С ' эRи (1 h21б ) Rвх.б ; Ср1 Ср1Rи Rвх ; Ср 2 Ср2Rк Rн . 1 Ср1 1 Ср 2 , Сопротивление резистора Rф выбирают из условия RфCф (5 10)tи . Описание работы: схема для исследования выбирается самостоятельно, в зависимости от количества каскадов усиления (предварительный расчет). 1. Уточнить характеристики транзистора МП40. IБ,мА IК,мА 1,0 40 UКЭ= -5В IБ=1,2 30 IБ=0,8 0,5 20 IБ=0,4 10 0 Ik max, mA: 30 Uкэ max, В: 15 Uкб0 max, В: 15 -0,1 -0,2 UБЭ,В 0 -4 -8 -12 -16 UКЭ,В Характеристики транзистора МП40 Тmax, С: 70 Ck, пФ: 60 h21э: 20...40 r'б, Ом:100-220 Uкб (Uкэ), В: 5 7 Uэб0 max, В: 10 Рк max, мВт: 150 Т, С: 55 Iэ (Ik), mA: 1 Ikб0, mkA: 15 fh21б, (гр)МГц: 1 2. Рассчитать сопротивления резисторов усилительного каскада для обеспечения режима усиления и соответствующей точки покоя. Точка покоя выбирается самостоятельно. 3. Снять АЧХ и осциллограммы сигналов при работе схемы в усилительном режиме. 4. Перевести схему в режим насыщения (два варианта). Заполнить таблицу (произвольная форма) в которой должны быть отражены варьируемые параметры переводящие схему в режим насыщения. Снять осциллограммы сигналов в контрольных точках. 5. Перевести схему в режим отсечки. Заполнить таблицу (произвольная форма) в которой отражаются параметры для перевода схемы в данный режим. Снять осциллограммы сигналов на входе и выходе схемы. 6. Подать на схему прямоугольные импульсы. В отчете представляются основные параметры импульса и его форма. Снять и привести в отчете форму и основные параметры выходного импульса. 7. Рассчитать и представить в отчете схему высокочастотной и низкочастотной коррекции для уменьшения длительности фронтов в 1,4 раза. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема для исследования. 4. Представить расчетные формулы и таблицу (произвольная форма) с результатами расчетов по априорной и апостериорной информации. 5. Таблицы с результатами измерений и соответствующие осциллограммы сигналов. Контрольные вопросы 1. Изменится ли положение рабочей точки при изменении статического коэффициента передачи тока? 2. Какое условие необходимо выполнить, чтобы перевести транзистор в режим отсечки? 3. Чему равно напряжение коллектор-эмиттер в режиме насыщения? 4. Какая связь между током коллектора и током эмиттера? 5. В чем преимущество схемы со смещением в цепи базы над схемой со смещением в цепи эмиттера? 6. В чем преимущество схемы с делителем напряжения в цепи базы над схемой со смещением в цепи эмиттера? 7. Какую роль играет сопротивление Rэ в цепи эмиттера для стабильности работы схемы? В чем она заключается? 8 ЛАБОРАТОРНАЯ РАБОТА № 2 Тема: исследование однополупериодных выпрямителей, и выходных фильтров. Цель: выучить принцип действия однополупериодных выпрямителей и выходных фильтров. Снять внешние характеристики однополупериодных выпрямителей. Оборудование: ГН (15В) – генератор напряжения стенда; осциллограф; АВ1, АВ2, АВ0 – ампервольтметры стенда; VD1, VD2 – диоды типов Д9Б или КД103А. Описание работы. 1. Схема для проведения экспериментов приведен на рис.ЛР2. ~ ~ ~ 1 VD1 PA R1 + I 4 + 2 3 VD2 + C1 + C2 R2 5 Рис.ЛР2 2. Снять осциллограммы входного и выходного сигналов однополупериодных выпрямителей с разными типами фильтров (С-фильтр, RC-фильтр, П-фильтр) и без них, при максимальном токе нагрузки. 3. Снять осциллограммы напряжений на диоде в классификационном режиме. 4. Снять внешнюю характеристику однополупериодной схемы выпрямителя с фильтрами и без них, изменяя ток нагрузки интервалами в 2мА. Результаты измерений занести в таблицу. Табл. 1. Пара- с С-фильтром с RC-фильтром с П-фильтром Без фильтра метр Uн, В Iн, мА 5. Снять зависимость амплитуды пульсаций выходного напряжения от тока нагрузки для выпрямителя с разными типами фильтров. Результаты занести в табл. 2. Ток нагрузки изменять интервалами в 3 ма. Табл. 2. Парас С-фильтром с RC-фильтром с П-фильтром Без фильтра метр Uпульс,В Iн, мА 6. Рассчитать оптимальные значения элементов RC, С и П-фильтра которые обеспечивают минимальные пульсации выходного напряжения. Повторить п.5. 6. Определить выходное сопротивление выпрямителя с каждым типом фильтра и без фильтров, пользуясь построенными графиками внешних характеристик. 7. Рассчитать выпрямленное напряжение, обратное напряжение, среднее значение тока вентилей, среднее значение тока нагрузки, действующее значение токов вентилей и нагрузки, коэффициент пульсаций выпрямленного тока, коэффициенты сглаживания фильтров и коэффициенты пульсаций с разными типами фильтров, мощность постоянного тока, среднее значение мощности нагрузки и КПД выпрямителя. 9 ЛАБОРАТОРНАЯ РАБОТА № 3 Тема: исследование двухполупериодных выпрямителей и выходных фильтров. Цель: изучить принцип действия двухполупериодных выпрямителей и выходных фильтров. Снять внешние характеристики выпрямителей. Оборудование: ГН (15В) – генератор напряжения стенда; осциллограф; АВ1, АВ2, МВ0 – ампервольтметры стенда; диоды типов Д9Б или КД103А, R1=200 Ом, 1kОм, 1,5kОм, C1=C2=20мкф и 50 мкф. Описание работы. 1. Схема для проведения экспериментов приведен на рис. ЛР3. ~ 1 VD1 PA R1 + I 3 VD2 VD3 ~ 2 + C1 VD4 + C2 R2 4 Рис.ЛР3 2. Снять осциллограммы входного и выходного напряжения двухполупериодного выпрямителя с разными типами фильтров (С-фильтр, RC-фильтр, П-фильтр) и без них, при максимальном токе нагрузки. 3. Снять осциллограммы напряжений на диоде в классификационном режиме. 4. Снять внешнюю характеристику мостовой схемы выпрямления с фильтрами и без них, изменяя ток нагрузки интервалами в 2мА. Результаты измерений занести в табл. Табл. 1. Пара- с С-фильтром с RC-фильтром с П-фильтром Без фильтра метр Uн, В Iн, мА 5. Снять зависимость амплитуды пульсаций выходного напряжения от тока нагрузки для выпрямителя с разными типами фильтров. Результаты занести в табл. 2. Ток нагрузки изменять интервалами в 3 мА. Табл. 2. ПараС С-фильтром С RC-фильтром С П-фільтром Без фильтра метр Uпульс,В Iн, мА 6. Рассчитать оптимальные значения элементов RC, С и П-фильтра которые обеспечивают минимальные пульсации выходного напряжения. Повторить п.5. 6. Определить выходное сопротивление выпрямителя с каждым типом фильтров и без них, пользуясь построенными графиками внешних характеристик. 7. Рассчитать выпрямленное напряжение, обратное напряжение, среднее значение тока вентилей, среднее значение тока нагрузки, действующее значение токов вентилей и нагрузки, коэффициент пульсаций выпрямленного тока, коэффициенты сглаживания фильтров, коэффициенты пульсаций с разными типами фильтров, мощность постоянного тока, среднее значение мощности нагрузки и КПД выпрямителя. 10 ЛАБОРАТОРНАЯ РАБОТА № 4 Тема: исследование тиристора. Цель: ознакомиться с вольтамперными характеристиками и основными параметрами тиристоров. Оборудование: ГТ, ГН3, осциллограф; АВМ1, ИВ, АВМ2 – ампервольтметры стенда; тиристор КУ101, R=2,4 кОм. Теоретический материал: Вольтамперные характеристики тиристоров показаны на рис.ЛР.4.1. U ост Imax B Участок ОА соответствует выключенному состоянию тиристора и характеризуется следующими параметрами: Iут – ток утечки – прямой ток через тиристор при напряжении, равном полоБ Iв ыкл вине напряжения Uвкл; Iурп=Iспр Uвкл – напряжение включения, при котором происходит переключение тиА ристора из закрытого состояния в отIв кл крытое; Iут Iвкл - ток включения, который соответ0 U в кл ствует напряжению Uвкл. 0,5U в кл Ua Г Iобр Вблизи точки А ток через тиристор изменяется значительно даже при небольшом увеличении напряжеРис.ЛР. 4.1 ния. На участке АБ дифференциальное сопротивление тиристора отрицательное. Поэтому, если последовательно с тиристором включено небольшое сопротивление, при выходе рабочей точки на участок АБ (когда напряжение на тиристоре достигает значения Uвкл) она переместится на участок БВ, который характеризуется положительным дифференциальным сопротивлением. Таким образом происходит включение тиристора. Положение рабочей точки на участке БВ будет определяться питающим напряжением и сопротивлением, включенным последовательно с тиристором. Этот участок характеризуется параметрами: Imax – прямой максимальный ток или средний допустимый; Uост – остаточное напряжение. Тиристор будет находиться во включенном состоянии до тех пор, пока ток через него будет больше тока выключения Iвыкл. При токе меньшем Iвыкл тиристор выключится. В отличии от динисторов, у которых напряжение Uвкл постоянно и не регулируется, напряжение включения тиристора можно изменять, подавая напряжение (или задавая ток) на управляющий электрод и катод прибора. Зависимость напряжения включения Uвкл от тока управления Iупр называется пусковой характеристикой тиристора. На рис. ЛР.3.1 пунктирными линиями показаны вольтамперные характеристики, соответствующие разным уровням тока управления. При некотором токе, называемом током спрямления Iспр, вольтамперная характеристика тиристора представляет собой практически прямую линию, проходящую через точки О,Б,В. На этой характеристике отсутствует участок с отрицательным сопротивлением. Для тиристоров указывают также параметры обратной ветви характеристики (участок ОГ). Например, чаще всего указывают обратный ток утечки, Iобр, определенный при некотором обратном напряжении. Описание работы: Ia 11 схема для исследования тиристора показана на рис.ЛР.4.2. PA2 - IG + PA1 + + ГТ + I G1 - ГН3 G2 + + PU2 PU1 - U - 1 R UG - 1. Снять вольтамперную характеристику динистора. Для чего, плавно изменяя напряжение блока питания от нуля до максимального значения (30В) записать ряд полученных значений тока и напряжения динистора. Результаты заносят в табл.4.1. 2 Табл.4.1 Рис.ЛР.4.2 Iа, мА Uа, В 2. По данным табл.3.1 построить вольтамперную характеристику динистора. 3. По построенной характеристике определить ток включения динистора Iвкл, напряжение включения Uвкл и остаточное напряжение Uост при токе Iа, соответствующем напряжению 30В источника питания. 4. Снять пусковую характеристику тиристора, занося результаты в табл.4.2. Табл.4.2. Iупр, мкА 50 100 200 500 1000 3000 5000 Uвкл, В При снятии характеристики устанавливают напряжение питания 0В, устанавливают ток управления 50мкА. Плавно изменяя напряжение питания, определяют момент, при котором происходит переключение тиристора. Выполнить подобные операции для других значений тока управления. 5. По данным табл.4.2 построить в соответствующем масштабе пусковую характеристику тиристора. 6. Определить остаточное напряжение тиристора при максимально возможном токе для данной схемы. 7. Определить ток выключения тиристора Iвыкл. Для чего установить сначала максимальный ток в цепи управления тиристора, а затем увеличить напряжение питания до максимума. Установить максимальный ток через тиристор нагрузочным сопротивлением. Убедиться по показаниям приборов, что тиристор включен. После этого изменением сопротивления нагрузочного потенциометра ток через тиристор уменьшать до тех пор, пока не произойдет выключение. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема для исследования характеристик. 4. Таблицы с результатами измерений и соответствующие характеристики. 5. Значения и наименования определенных параметров тиристора. Контрольные вопросы 1. Что происходит с напряжением включения тиристора, при росте тока через управляющий электрод? 2. Какой ток называется током спрямления тиристора? 3. Каковы основные параметры тиристора? 12 ЛАБОРАТОРНАЯ РАБОТА № 5 Тема: исследование параметрического стабилизатора напряжения. Цель: ознакомиться с принципом действия и основными параметрами параметрических стабилизаторов напряжения. Оборудование: ГН (15В) – генератор напряжения стенда; осциллограф; АВ1, АВ2, МВ0 – ампервольтметры стенда; диоды типов Д9Б или КД103А, R1=510 Ом, R2=510 Ом, 1кОм, 1,6кОм, С1=C2=50мкФ, стабилитрон Д814А. Теоретический материал: наиболее часто стабилитроны используют в схемах стабилизации напряжения. В настоящее время широкое распространение получили полупроводниковые стабилизаторы напряжения питания, т. е. устройства, выходные напряжения которых практически не изменяются как при изменении напряжения питания, так и при изменении тока нагрузки. По сравнению со стабилизаторами на электронных лампах и газоразрядных приборах полупроводниковые стабилизаторы отличаются высокой надежностью, экономичностью, меньшими массой и габаритами. Распространенная схема простейшего Rб + параметрического стабилизатора постоянного напряжения, показанная на VS Iб Rн рис.ЛР.5.1, представляет собой делиUп Uн=Uст тель напряжения, состоящий из балIст Iн ластного резистора Rб и стабилитрона VD, к которому подключено сопротивление нагрузки Rн. При изменении Рис.ЛР.5.1 питающего напряжения Uп изменяется ток через резистор Rб. Это изменение тока вызвало бы изменение напряжения на нагрузочном резисторе, пропорциональное его сопротивлению, если бы не было стабилитрона. Подключение стабилитрона параллельно нагрузке препятствует изменению напряжения, поддерживая его на уровне Uст. При этом изменению тока через резистор Rб соответствует примерно такое же изменение тока через стабилитрон, а ток в нагрузке изменяется незначительно. В этом заключается стабилизирующее свойство схемы данного стабилизатора. Итак, на резисторе Rб падает разность напряжений Uп и стабилизируемого напряжения Uн=Ucт. Этому соответствует равенство Rб I б Uп - Uст (1) причем I б Iст Iн (2) где Iб, Iст, Iн—токи в ветвях схемы, показанной на рис.ЛР.4.1. Допустим, что напряжение Uп изменяется от минимального значения Uп.мин до максимального Uп.макс. Тогда, чтобы схема сохраняла стабилизирующее свойство, ток Iст через стабилитрон должен быть больше Iст.мин при Uп=Uп.мин И быть меньше Iст.макс при Uп.макс. С другой стороны, при изменении сопротивления нагрузки Rн от номинального (заданного значения) ток через стабилитрон также изменяется, причем с уменьшением Rн (с увеличением тока нагрузки) ток через стабилитрон уменьшается и наоборот. Чтобы и в этом случае схема сохраняла стабилизирующее свойство, ток через стабилитрон Iст должен быть больше Iст.мин при Rн=Rн.мин и ток Iст должен быть меньше Iст.макс при Rн=Rн.макс. Обеспечение условия стабилизации можно записать математически, учитывая выражения (1) и (2), в следующем виде: Uп .мин Uст Rб .макс (3) Iст.мин Iн.макс 13 Uп .макс Uст Iст.макс Iн.мин где ток нагрузки Iн=Uст/Rн. Из этих неравенств следует, что сопротивление балластного резистора Rб должно быть меньше Rб.макс и больше Rб.мин. Стабилизатор помимо основных параметров — номинальных выходного напряжения и тока нагрузки характеризуется еще и другими параметрами, из которых мы рассмотрим лишь коэффициент стабилизации напряжения, обозначив его Кст. Этот коэффициент показывает, во сколько раз относительное изменение выходного напряжения стабилизатора меньше относительного изменения входного напряжения при постоянном нагрузочном сопротивлении и определяется по формуле Uп/Uп Kст при Rн=const. (4) Uн/Uн где Uп —приращение входного напряжения стабилизатора; Uн —приращение напряжения на выходе. Коэффициент стабилизации Кст, определенный по формуле (4), связан с параметрами схемы следующим образом: Rб .мин Kст Описание работы: схема для исследования рис.ЛР.5.2. ~ 1 UcтRб U п rД параметрического VD1 (5) стабилизатора показана на PA R1 + I 3 VD2 VD3 ~ 2 + C1 VD4 + C2 VS5 R2 4 Рис.ЛР.5.2 1. Подключить к схеме для исследования параметрического стабилизатора измерительную аппаратуру и мостовой выпрямитель. Таблица. Определение коэффициента стабилизации Rн=1,6 кОм Rн=820 Ом Uп, В Uн, В Uп, В Uн, В 15 15 25 25 30 30 Кст= Кст= 2. Рассчитать по известным параметрам схемы коэффициент стабилизации напряжения Кст стабилизатора, считая Uст=8 В, Uп=15 В, rд=10 Ом. 3. Определить экспериментально и записать в таблицу коэффициент стабилизации напряжения при изменении входного напряжения от 15 до 30 В для обоих нагрузочных резисторов. Для чего установить входное напряжение, равное 25 В, и измерить выходное напряжение стабилизатора с точностью до пяти сотых долей вольта. Затем, увеличив входное напряжение до 30 В, снова измерить выходное напряжение. По результатам измерений, записанным в таблицу, и формуле (4) определить искомый коэффи14 циент стабилизации. Сравнить полученные значения коэффициента стабилизации с расчетными в п.2, учитывая, что они могут отличаться на 20—30%. 4. Определить расчетно-экспериментальным путем минимальное Rб.мин и максимальное Rб.макс сопротивления балластного резистора при Uп.мин=15 В, Uп.макс=30В. Для определения сопротивлений балластного резистора по формулам (3) необходимо измерить минимальный Iн.мин и максимальный Iн.макс нагрузочные токи, определенные при любом входном напряжении от 15 до 30В. В качестве напряжения Ucт принять значение напряжения Uн из таблицы, округляя его до десятых долей вольта. Для стабилитронов принять Uст.мин и Uст.макс из ЛР#2 первой части курса. 5. По рассчитанному диапазону сопротивления убедиться в правильности выбора номинала резистора Rб в схеме исследуемого стабилизатора. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема параметрического стабилизатора с подключенными измерительными приборами. 4. Таблица с результатами измерений и вычислений коэффициента стабилизации. 5. Наименования и значения расчетных и экспериментально определенных параметров стабилизатора. Контрольные вопросы 1. Что называется динамическим сопротивлением стабилитрона? 2. Как зависит коэффициент стабилизации параметрического стабилизатора от динамического сопротивления стабилитрона: коэффициент стабилизации выше, когда динамическое сопротивление больше или меньше? 3. В каком случае ток через стабилитрон в параметрическом стабилизаторе больше: когда нагрузочное сопротивление больше или меньше? 4. Какими достоинствами обладают полупроводниковые стабилизаторы по сравнению со стабилизаторами на электронных лампах и газоразрядных приборах? 5. Каков принцип действия параметрического стабилизатора напряжения на полупроводниковом стабилитроне? 15 ЛАБОРАТОРНАЯ РАБОТА № 6 Тема: исследование компенсационного стабилизатора напряжения. Цель: изучить принцип действия компенсационного стабилизатора напряжения последовательного типа на транзисторах и стабилитроне; ознакомиться с основными параметрами, характеризующими стабилизаторы. Оборудование: ИП, АВМ1, МВ; диоды типов Д9Б или КД103А, транзисторы МП40 – 2шт, стабилитрон Д814А, R1=12 кОм, R2=7,5 кОм, R3=200 Ом, R4=2,2 кОм (переменное), R5=1 кОм, R6=620 Ом (1,2кОм, 1,8кОм), С1=50мкФ*25В, С2=20мкФ*25В. Теоретический материал: Входное напряжение Uвх поступает на регулирующий элемент 1, в качестве которого обычно используют электронную лампу или транзистор, рабоRн Uвых 3 U Uвх тающие в активном (усилительном) ре+ R2 жиме. Регулирующий элемент включен последовательно с нагрузкой (отсюда и 2 Uвых название типа стабилизатора последоUоп вательный). Для измерения выходного Рис.ЛР6.1. Структурная схема компенсационнапряжения Uвых стабилизатора слуного стабилизатора напряжения жит измерительный элемент ИТ, состоящий из делителя на резисторах R1, R2 и источника 2 опорного напряжения Uoп. Коэффициент деления R 2 /( R1 R 2) зависит от требуемого соотношения между выходным напряжением опорного элемента. Так, если Uon=8 В, а требуемое значение выходного напряжения Uвых=40 В, коэффициент деления должен быть равен 1/5. Если задано выходное напряжение Uвых1 и Uоп1 напряжение Uon1, коэффициент . Таким образом, разность напряжений Uвых1 U Uвых1 Uоп1 0 . Если выходное напряжение Uвых отличается от Uвых1, появляется разность напряжения U Uвых Uоп , поступающая на вход усилителя напряжения постоянного тока 3 (УПТ), выходной сигнал которого пропорционален напряжению U. Схема строится таким образом, чтобы отрицательному приращению U (что соответствует уменьшению выходного напряжения от значения Uвых1 соответствовало уменьшение сопротивления регулирующего элемента и, как следствие, увеличение выходного напряжения почти до значения Uвых1. Положительному приращению U будет соответствовать увеличение сопротивления регулирующего элемента и уменьшение выходного напряжения до значения Uвых1. Таким образом, стабилизатор предназначен для поддержания выходного напряжения на уровне Uвых1 как при изменении входного напряжения, так и при изменении тока (или сопротивления) нагрузки, т.к. эти изменения в основном и отражаются на выходном напряжении. Преимущества стабилизаторов компенсационного типа по сравнению с параметрическим заключаются в значительном расширении диапазонов выходных напряжения и тока, лучшей стабилизации, а также более высоком коэффициенте полезного действия (примерно 0,8—0,9). В компенсационных стабилизаторах, как и в параметрических, качество стабилизации при изменении входного напряжения оценивается коэффициентом стабилизации, определяемым при постоянной нагрузке, Uвх / Uвх Kст при Rн const . Uвых / Uвых + 1 ИТ R1 16 который показывает, во сколько раз относительное изменение выходного напряжения меньше относительного изменения входного. Изменение выходного напряжения стабилизатора происходит не только при изменении входного, но и при изменении тока нагрузки. Величина, связывающая изменения выходного напряжения Uвых стабилизатора с изменениями тока нагрузки Iн, называется выходным сопротивлением и определяется при постоянном входном напряжении rвых Uвых / Iн при Uвх const. К. п. д. стабилизатора определяется, как отношение мощности в нагрузке к входной мощности: UвыхIн/ UвхIвх где Iн — максимальное значение тока нагрузки. Описание работы: схема для исследования компенсационного стабилизатора на рис.ЛР6.2. 1. Измерить согласно схеме, 3 VD1 V5 1 показанной на рис.ЛР6.2, ~ R1 R2 PA напряжения и токи стабилиVD2 R3 I затора при условиях, укаVD3 + + занных в таблице и обоих C1 R4 4 нагрузочных сопротивлений V6 VD4 2 R6. Результаты измерений ~ R6 R5 занести в таблицу. Выходное напряжение измеряют с + 5 точностью до пяти сотых + долей вольта. Рис.ЛР6.2 2. Определить коэффициенты стабилизации Кст напряжения стабилизатора для входного напряжения 30 В при обоих нагрузочных токах Iнmin, Iнmax. Для расчета использовать данные таблицы. Таблица. Напряжения и токи стабилизатора Uвх, В Uвых, В Iн, мА Iвх, мА 15 Iнmin= 15 Iнmax= 30 Iнmin= 30 Iнmax= 3. Определить выходное сопротивление rвых стабилизатора для входного напряжения 15 и 30 В, пользуясь данными таблицы. 4. Рассчитать к. п. д. стабилизатора для каждой серии измерений, результаты которых отражены в таблице. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема исследуемого стабилизатора с подключенными приборами. 4. Таблица с результатами измерений токов и напряжений стабилизатора. 5. Расчетные и экспериментально определенные значения параметров стабилизатора: rвых, Kст, . Контрольные вопросы 1. Каков принцип действия компенсационного стабилизатора? 3. Какой параметр определяет изменения выходного напряжения с изменением тока нагрузки стабилизатора: коэффициент стабилизации или выходное сопротивление? 17 ЛАБОРАТОРНАЯ РАБОТА № 7 Тема: исследование стабилизатора тока на транзисторе. Цель: ознакомиться с назначением и основными параметрами стабилизатора тока на транзисторе; изучить принцип действия параметрического стабилизатора тока и исследовать его характеристики. Оборудование: ГН1, ГН2, АВМ1, АВМ2, МВ, АВО; транзистор МП40 , R1=620 Ом, R2=2,2 кОм, 10 кОм (переменное). Теоретический материал: IК Rэ - Rн + IЭ2>IЭ1 IЭ1 IЭ IК Uупр Iэ UК.Б. Iк Uпит + - UК.б UК.б Рис.ЛР7.1. Включение транзистора Рис.ЛР7.2. Выходные характеристики по схеме ОБ транзистор с ОБ Отношение приращения напряжения коллектор-база Uк.б. к соответствующему приращению коллекторного тока Iк. При постоянном токе эмиттера Iэ. определяет динамическое сопротивление перехода коллектор-база, которое называется коллекторным сопротивлением транзистора, r U К .Б . / I К при Iэ const. Чем больше коллекторное сопротивление, тем более полого расположено семейство выходных характеристик транзистора. Если в коллекторную цепь транзистора включено нагрузочное сопротивление Rн, коллекторный ток транзистора, будет определяться соотношением: I К I Э U К .Б . / rК I К 0 где - коэффициент передачи эмиттерного тока; Iэ – эмиттерный ток транзистора, задаваемый источником управления Uупр. через резистор Rэ; Uк.б. – напряжение коллектор-база; IК0 – обратный ток транзистора. В свою очередь UК.Б.=Uпит-IКRН. Подставляя это значение в предыдущее соотношение получим: U I R I К I Э ПИТ К Н I К 0 rК Для маломощных транзисторов rК лежит в пределах от 200 кОм до 2 МОм. Количественно эффект стабилизации тока можно оценить с помощью коэффициента стабилизации тока U К . Б . / U К . Б . Ki при Iэ const I К / I К Коэффициент стабилизации тока связан с параметрами и режимом транзистора следующим соотношением: Ki rК I К / U К .Б . Коллекторное сопротивление rк транзистора зависит от коллекторного тока и от напряжения коллектор база. Однако зависимость rк от UК.Б. в рабочих режимах невелика и ею можно пренебречь, а зависимость rк от IК выражается соотношением: rК I К E ЭКВ . 18 где Еэкв – постоянный для данного транзистора коэффициент (эквивалентная ЭДС), имеющий размерность вольты. Описание работы: 1. Собрать схему стабилизатора тока на транзисторе (рис.ЛР7.3). 2. Определить экспериментально коэффициент стабилизации тока исследуемой схемы при напряжении UК.Б.=20В, и токах G2 PA эмиттера, указанных в табл.ЛР7.1. R1 V1 + + Для определения коэффициента ГН2 I стабилизации тока подключить + + Rн=0 и установить напряжение R2 ГН1 G1 U PU UК.Б.=20В. Установить требуемый ток в эмиттерной цепи согласно табл.ЛР6.1 и измерить ток коллекРис.ЛР7.3. тора с точностью до 3-5 мкА, записав его значение в эту же таблицу. Затем, установив напряжение U К.Б.=10В, снова измерить ток коллектора. Высчитав приращения коллекторного тока при изменении напряжения UК.Б. от 20 до 10В, определить соответствующие коэффициенты стабилизации. Таблица ЛБ.7.1 Коэффициенты стабилизации тока UК.Б.,В Iэ=10 мА Iэ=6 мА Iэ=4 мА Iэ=2 мА 20 IК, мА 10 IК, мА UК.Б.=5В IК=... IК=... IК=... IК=... Кi = ... 3. Определить расчетным путем экспериментальное значение коллекторного сопротивления для исследуемого транзистора при токах эмиттера, указанных в табл. ЛР7.1, и соответствующих токах коллектора. Значения сопротивления записать в табл. ЛР.7.2. Для расчета сопротивления rК использовать данные табл. ЛР7.1. Значение тока IК в табл.ЛР7.2 при заданном токе Iэ соответствует округленному до единиц миллиампер значению тока IК табл. ЛР7.1. Таблица ЛБ.7.2 Коллекторные сопротивления транзистора МП40 Iэ, мА 10 6 4 2 IК, мА rК, МОм E ЭКВ . rК I К 4. По данным табл. ЛР7.2 построить зависимость сопротивления rК от тока IК. 5. Установить ток эмиттера 5 мА и напряжение UК.Б.=20В. Включая разные нагрузочные сопротивления в коллекторную цепь стабилизатора тока построить зависимость Iк f (Rн ) . Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема исследуемого стабилизатора с подключенными приборами и таблицы 1, 2. 4. График зависимости коллекторного сопротивления от тока коллектора и зависимость Iк f (Rн ) . Контрольные вопросы 1. Как измениться коллекторный ток транзистора, включенного по схеме ОБ, если Iэ const , а нагрузочное сопротивление в коллекторной цепи увеличивается? 2. Как измениться коллекторное сопротивление транзистора от тока? 19 ЛАБОРАТОРНАЯ РАБОТА № 8 Тема: исследование схемы амплитудной модуляции. Цель: ознакомиться с назначением и основными параметрами схем амплитудных модуляторов; изучить принцип получения амплитудно-модулированных колебаний. Оборудование: ГН2, ГВЧ, ГНЧ, АВМ1, МВ; транзисторы V1 и V2 типа МП40 , L1 фильтр Z1, R1=51кОм, R2=10кОм, R3=7,5кОм, R4=82кОм, R6=R7=2кОм, R5=33кОм, С1=С4=100пФ, С2=510пФ, С3=0,1мкФ, С5=С6=0,01мкФ. Теоретический материал: Амплитудный модулятор. Сигнал несущей частоты определяется выражением u 0 (t ) U 0 cos 0 t , где U0 – амплитуда; 0 – частота несущего сигнала. Модулирующий низкочастотный сигнал u n (t ) U m cos m t , где Um – амплитуда; m – частота модулирующего сигнала (носитель информации). При амплитудной модуляции должно выполняться следующее неравенство 0 > 2 m . При отсутствии сигнала несущей частоты, выходное напряжение модулятора определяется u m (t ) U вых U m cos m t U вых (1 m ) cos m t где Uвых – постоянная составляющая выходного сигнала; U m m - глубина модуляции, 0 m 1. U вых При воздействии сигнала несущей частоты выходное напряжение определяется равенством u вых (t ) u m (t ) u 0 (t ) U вых (1 m ) cos m t U 0 cos 0t mU вых mU вых cos( 0 m )t cos( 0 m )t 2 2 Спектр сигнала состоит из трех составляющих: - на несущей частоте 0; - на двух боковых 0 m симметрично расположенных относительно несущей (рис.1). Коэффициент модуляции ВА М 100% ВА Недостаток амплитудной модуляции – потеря мощности в спектре рабочих частот (наибольшая мощность тратится на частоте несущего сигнала). Поэтому чаще используют балансный модулятор. Если на вход балансного модулятора подать сигнал несущей частоты u0 (t ) U 0 sin 0t и синусоидальный низкочастотный сигнал un (t ) U m sin mt то на выходе умножителя UU uвых (t ) U m sin m t U 0 sin 0t 0 m cos( 0 m )t cos( 0 m )t 2 Так как в выходном сигнале балансного модулятора нет постоянной составляющей, его называют модулятором с подавленной несущей (рис.2). U 0 cos m t 20 Uвых(t) mUo Uвых(t) B mUo Uo t A t Рис.ЛР8.1. Рис.ЛР8.2. Описание работы: 1. Собрать схему амплитудного модулятора (рис.ЛР8.3). -Ec L1 R4 C2 R6 C5 C4 R1 V2 C6 V1 C1 R5 R2 R3 C3 R7 + Рис. ЛР8.3. 2. Определить: амплитуду сигнала несущей частоты , амплитуду модулирующего низкочастотного сигнала и его частоту, выходное напряжение модулятора при отсутствии сигнала несущей частоты, глубину модуляции, выходное напряжение при воздействии сигнала несущей частоты. 3. Рассчитать: сигнал несущей частоты, модулирующий низкочастотный сигнал , выходное напряжение модулятора при отсутствии сигнала несущей частоты, глубину модуляции, выходное напряжение при воздействии сигнала несущей частоты, коэффициент модуляции. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема исследуемого амплитудного модуля. 4. Таблицы расчетных и экспериментальных данных. 5. Осциллограммы модулирующего сигнала и сигнала несущей частоты. 21 ЛАБОРАТОРНАЯ РАБОТА № 9 Тема: исследование схемы амплитудного детектора. Цель: ознакомиться с назначением и основными параметрами схем амплитудных детекторов. Оборудование: ГН2, ГВЧ, ГНЧ, АВМ1, МВ; транзистор V1 МП40 , L1- L2- фильтр Z3, R1=50кОм, R2=10кОм, R3=820Ом, R4=33кОм, С1=С6=0,022мкФ, С2=С5=510пФ, С4=0,1мкФ, диод Д220. Теоретический материал: На вход детекторного устройства поступает амплитудно-модулированный сигнал, а на его выходе должно быть получено низкочастотное напряжение сигнала сообщения. В качестве выходного фильтра используется фильтр нижних частот (параллель1 ная RC-цепочка). Граничная частота фильтра гр должна не быть меньше max. RC U Коэффициент передачи напряжения K mUm где U - амплитуда напряжения низкой частоты на выходе детектора; mUm - максимальное изменение амплитуды несущих колебаний. Различают квадратичное и линейное детектирование. На практике широко применяют линейное детектирование - детектирование сильного сигнала. Искажений в схемах избегают применением диодного детектирования. ВАХ диода при анализе аппроксимируется кусочно-линейной функцией (два отрезка). При положительном напряжении на диоде, в анодной цепи возникает ток (рис. ЛР8.1). Угол отсечки определяется равенством: I 2 Длительность импульса тока в угловых единицах: 2 t . Низкочастотная составляющая тока равна среднему за период значению: t 1 Um 2 URC R Iср Д (cos t cos )dt 2 0 1 так как , то g, а t 2 RД g Um Iср (sin cos ) Амплитуду несущих колебаний обозначают символом U0, при этом Um U 0(1 m cos t ) Iср I i gU 0 sin cos , I mgU 0 sin cos cos t где I В узкой полосе частот 0 сопротивление RC-фильтра максимально и равно R, тогда g U 0 m R U (sin cos ) cos t напряжение на фильтре U RC I R i R U u 22 При Rн>>R нелинейные искажения полезного сигнала отсутствуют, так как в спектре выходного напряжения нет высших гармоник звуковой частоты. При малом входном сопротивлении следующего каскада возникают нелинейные искажения, т.к. сопротивление диода переменному току R~ R (постоянное сопротивление) RRвх .сл. R~ R m>m кр R Rвх.сл. Амплитуда переменной составляющей тока Im mU 0 Im при больших m оказывается больше R ~ Im кр U0 mкр постоянной I , диод в диапазоне t2-t1, R~ оказывается закрытым, что и приводит к нелиI_ нейным искажениям. t1 t2 Значение коэффициента модуляции, при котором Im=I~ называют критическим R mкр ~ . R Описание работы: 1. Собрать схему амплитудного детектора (рис.ЛР9.3). -Ec C2 L1 L2 V2 C5 R1 C4 2 3 V1 C1 R2 R4 R3 C3 C6 + Рис. ЛР9.3. 2. Определить: амплитуду несущих колебаний, низкочастотную составляющую тока, токовые составляющие среднего тока, значение напряжения на входе и выходе схемы, критическое значение коэффициента модуляции. 3. Рассчитать: основные характеристики амплитудного детектора. Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема исследуемого амплитудного детектора. 4. Таблицы расчетных и экспериментальных данных. 5. Осциллограммы сигналов в контрольных точках. 23 ЛАБОРАТОРНАЯ РАБОТА № 10 Тема: исследование схемы частотного детектора. Цель: ознакомиться с назначением и основными характеристиками схем частотных детекторов. Оборудование: АВМ1, ЧМ, ГВЧ, осциллограф; съемные элементы: R1=R2=20кОм, С1=С3=510пмкФ, С2=47пФ, С4=С5=22нФ, фильтры Z3 и Z4. Фильтр Z3 установить штырями в отверстия на условном изображении L2, L3, гибкие выводы одного цвета в гнезда Х4, Х5, третий гибкий вывод - в гнездо Х6 Теоретический материал: Частотное детектирование это процесс преобразования частотномодулированного сигнала в колебания низкой частоты. Простейший способ детектирования баr'2 зируется на использовании расстроенU1 U'2 U''2 I2 ного колебательного контура. L'2 U1 Принцип. Резонансная частота колебаU' U'' Eм тельного контура отличается от несущей C2 на величину превышающую девиацию U'2 U''2 частоты. При изменении частоты отноI2 L''2 сительно несущей на f напряжение на r''2 Eм + f колебательном контуре изменяется на Umax. Частотное моделирование применяют для снижения помех. Частотно моделированными называют колебания, амплитуда которых постоянна, а частота изменяется по закону модулирующего низкочастотного сигнала. Разность f между частотами немодулированных и модулированных колебаний называют отклонением или девиацией частоты. Девиация частоты происходит по закону модулирующего сигнала. Особенности частотного модулирования - отклонение частоты зависит от амплитуды модулирующего сигнала. Уравнение частотной модуляции: u Umsin( 0t Mf sin t ) L L R R 0 - угловая частота колебаний высокой частоты; =2 - угловая частота колебаний f max низкой частоты; Mf - индекс модуляции; f max - наибольшее отклонение чаF стоты; F - частота модулирующего сигнала. Описание работы: 1. Собрать схему частотного детектора (рис. ЛР10.2). C2 L4 2 V1 C1 L1 L2 R1 C4 R2 C5 C3 L3 V2 3 Рис. ЛР10.2 24 2. Рассчитать граничные частоты f01 и f02 исследуемого детектора. Снять экспериментально основную характеристику детектора, занося показания в табл. 10.1. Таблица 10.1 f, кГц Uвых, В Прежде чем снимать характеристику, следует экспериментально определить a рабочий диапазон частот исследуемого детектора, т.е. частоты f01 и f02. Для чего установить входное напряжение 0,1-0,5В. Подсоединить вольтметр к точке 0а и плавно изменять частоту. При этом отмечают Umax и f1. 0 Подсоединить вольтметр к точке 0b и плавно изменять частоту. При этом отмечают Umax и f2. Средняя частота между f1 и f2 будет f0. b 3. По данным таблицы построить основную характеристику частотного детектора, отметив на ней частоты f01, f02 и fн. 4. Снять амплитудные характеристики детектора для экспериментально определенных частот f01 и f02, занося показания в табл. 10.2 Измеряют амплитуду входного напряжения, изменяемого от нуля через интервалы при которых выходное напряжение изменяется на 0,5В. 5. По данным табл. 10.2 построить амплитудные характеристики детектора для трех частот и определить по ним пороговое напряжение Uп детектора. Таблица 10.2 f01=... кГц Uвх, мВ Uвых, мВ f02=... кГц Uвх, мВ Uвых, мВ Uк1, Uк2 Uк1 Uк2 f02 fн f01 f Uвых fн Содержание отчета 1. Наименование отчета. 2. Название и технические данные использованных измерительных приборов. 3. Схема исследуемого частотного детектора. 4. Расчетные и экспериментальные параметры частотного детектора: f01, f02, fн, Uп 5. Таблицы 1 и 2 с результатами измерений. 6. Графики основной и амплитудной характеристик детектора. f Uвых fн<f 2<f 01 Uп Uвх Резонансные кривые параллельных контуров (а), основная (б) и амплитудная (в) характеристики частотного детектора. 25 Приложение А ЭЛЕКТРИЧЕСКИЕ ИМПУЛЬСЫ И ИХ ПАРАМЕТРЫ Принцип действия большинства автоматических и телемеханических устройств основан на импульсных методах работы. Электрический импульс кратковременное отклонение напряжения или тока от некоторого исходного уровня, называемого основанием импульса. Исходный уровень основания может иметь разные значения нулевое, положительное или отрицательное. Длительность паузы (время между смежными импульсами) должна быть достаточной для возврата электрической цепи, находящейся под импульсным воздействием, в исходное состояние, при котором цепь находилась непосредственно перед началом очередного импульсного воздействия. Каждый очередной импульс вызывает в электрической цепи те же явления, что и предыдущий. Импульс (рис. П1) имеет следующие характерные участки: основание, фронт, вершина и срез (или задний фронт). Основными параметрами импульса являются: форма, амплитуда Umax (или Imax), полярность, полная Ти и активная Ти.а длительности импульса, длительность фронта и среза ta и tc, период следования Т (или частота повторения импульса f). Дополнительными параметрами, получаемыми из основных, являются крутизна фронта или среза и скважность импульсов. Активная длительность импульса Ти.а соответствует интервалу времени на уровне половины амплитуды сигнала. Крутизна фронта представляет собой отношение Sф=Umax/tф, а крутизна среза Sc=Umax/tc. Cкважность импульса представляет собой отношение периода Т к длительности импульса Ти, т.е. =Т/Ти. Всегда 1, так как ТTи, а при равных длительностях импульсов и пауз (Ти=Тп) =2. Частота повторения импульсов является величиной, обратной периоду (f=1/T), и определяет число импульсов в 1 с. По форме импульсы бывают прямоугольными, треугольными, трапецеидальными, экспоненциальными и т. п. В устройствах автоматики и телемеханики большее применение получили прямоугольные и экспоненциальные импульсы (рис. П1, б, в). Прямоугольный импульс U фронт вершина фронт U обладает бесконечно больUmax Umax скос шой крутизной с резкими скачt 0.5Umax T иа срез ками напряжения и тока, котооснование t рые условно называются преtф tc Tи Tи t Tп Tи T делами; импульс состоит из двух пределов, один из котоT б) a) рых положительный Uп max, а U п max U другой отрицательный Uo max (указаны соответственно t стрелками вверх и вниз на U0max T рис. П1, б). Экспоненциальв) ный импульс (рис. П1, в), так Рис. П1. Характерные участки импульсов (а), же как и прямоугольный, хаимпульсы прямоугольной (б) и экспоненциальной (в) формы. рактеризуется перепадом напряжения или тока, после которого напряжение или ток в отличие от прямоугольного импульса изменяются в соответствии с экспоненциальной функцией времени. По полярности различают импульсы положительные, отрицательные и двусторонние. В ряде случаев полярность импульсов условна, что зависит от уровня их основания. Например, прямоугольные импульсы (рис. П1, б) можно рассматривать положительными по отношению к оси абсцисс Ot и отрицательными по отношению к оси Ot . Для двусторонних импульсов (рис. П1, в) период определяется как интервал времени между импульсами одной и той полярности; амплитуды и длительность импульсов различной полярности могут быть неодинаковыми. А уровень основания как нулевым, так и смещенным в области положительных или отрицательных значений напряжения или тока. Приложение Б ДИФФЕРЕНЦИРУЮЩИЕ ЦЕПИ 26 t1 R 0.37 U max t2 3г Сп t г г Uc=Uвых 0,007 U max R нагр 0.05 U max вых ip 0.993 u max Uc 0.95 U max U вх C 0.63 U max + U max Дифференцирующие цепи относятся к устройствам формирования импульсов. Формирование импульсов основано на изменении одного или нескольких параметров импульсов, поступающих на вход устройства формирования от какого-либо источника. Такое устройство представляет собой четырехполюсник, который может быть активным или пассивным. Схема формирования, представляющая собой активный четырехполюсник, наряду с изменением параметров импульса может увеличивать амплитуду его напряжения или тока. У большинства схем формирования один из зажимов входной и выходнои цепи представляет собой фиксированный постоянный потенциал; часто эти зажимы объединяют в одну электрическую точку, делая ее общей для входной и выходной цепей (рис. П2, а), поэтому обозначениями Вход и Выход называют лишь зажимы, на которых уровень напряжения изменяется в процессе работы схемы . 3г 5г 5г а) б) t2 t1 t I max 3г 3г 5г t U max I max 5г U max U вых=U r ic в) Рис. П2. Схема дифференцирующей цепи (а), изменение напряжения на конденсаторе экспоненциальные импульсы тока в цепи RC (в) и напряжение на выходе (г). г) (б), Различают линейные и нелинейные схемы формирования импульсов. В первых используют только линейные элементы электрических цепей R, L, C, во вторых нелинейные элементы (в основном диоды и транзисторы), обладающие односторонней проводимостью. Дифференцирующей называют цепь, у которой постоянная времени (=RC) значительно меньше длительности входных импульсов, а выходное напряжение снимается с активного сопротивления (рис. П2, а). Основанием для названия цепи является соотношение между ее входным и выходным напряжением. Рассмотрим процесс воздействия прямоугольного входного импульса на дифференцирующую цепь RC. При подаче прямоугольного напряжения Uвх на цепь RC с незаряженным конденсатором через нее протекает ток заряда iз и напряжение на конденсаторе uс (рис. П2, б) возрастает по экспоненциальной кривой u c U max (1 e t / ). (П1) Если начальное напряжение заряженного конденсатора Umax, то его уменьшение при разрядке происходит согласно уравнению u c U max e t / . (П2) В (П1) и (П2) t текущее время заряда и разряда конденсатора; =RC постоянная времени цепи. На графике (рис. П2, б) штриховой линей показан генерируемый источником прямоугольный импульс с длительностью Tи=t2-t1, а сплошной линией напряжение на 27 емкости, возрастающее по экспоненте с момента t1 образования положительного перепада напряжения на входе и спадающее с момента t2 возникновение отрицательного перепада. Ток в цепи RC (рис. П2, в) изменяется скачкообразно до максимума в моменты образования перепадов напряжения на входе и затем спадает по экспоненте, стремясь к нулю вследствие заряда или разряда конденсатора. Направление тока зависит от характера процесса заряд (ток i3) или разряд (ток iр). Кривая напряжения на резисторе R (uR=iзR=ipR) будет иметь ту же форму, что и кривая тока в цепи (рис. П2, г). При этом если потенциал нижнего вывода с резистора R фиксирован на нулевом уровне, как в нашем случае (рис. П2, а), то потенциал выходного зажима цепи будет отклонятся от этого уровня в положительном направлении с момента t1 и в отрицательном с момента t2 (рис. П2, г). Так как для мгновенных значений напряжений в любой момент должно соблюдаться равенство uих= uC+ uR, то график, представленный на рис. П2, г, можно получить как разность ординат штриховой и сплошной кривых, приведенных на рис. П2, б. Неустановившиеся режимы заряда и разряда конденсатора в цепи RC будут полностью завершаться , если длительность входного импульса Tи достаточно велика для того, чтобы конденсатор успел зарядится до уровня, соответствующего вершине входного напряжения, а пауза между импульсами достаточная для его полного разряда. В этом случае амплитуды тока и напряжения на резисторе R будут одинаковыми для импульсов обеих полярностей: I max U max / R и Uвых max=Umax (П3) Таким образом, результат воздействия прямоугольного импульса на дифференцирующую цепь сводится к преобразованию прямоугольного импульса с произвольным основанием в двусторонний импульс экспоненциальной формы. Ток конденсатора дифференцирующей цепи связан с напряжением на нем выражением du ic C c . (П4) dt du Напряжение на резисторе R (оно же выходное) uв ых u R iC R CR C (П5) dt Для моментов времени t 5, когда конденсатор полностью заряжен и ток в цепи RC близок к нулю (рис.П2,б,в), можно пренебречь малым слагаемым uR в сумме uвх=uC+uR и считать, что uCuR. Тогда выражение (П5) может быть представлено в виде du (П6) u вых CR вх dt т. е. выходное напряжение пропорционально производной от выходного напряжения по времени. Активную длительность экспоненциального импульса, формируемого дифференцирующей цепью из перепада входного напряжения, определяют, подставив значения Tи.а и Umax/2 вместо текущих переменных в уравнение (П2) uвых=Umaxe-t/, т. е. U max / 2 U max e Tи . а / . откуда (П7) Tи.а ln 2 0,7 0,7 RC (П8) Определение активной длительности экспоненциального импульса на любом другом условном уровне производится аналогично. Дифференцирующие цепи находят широкое применение в импульсных схемах для формирования коротких сигналов экспоненциальной формы, которыми осуществляется управление электронными переключающими устройствами. Приложение В ИНТЕГРИРУЮЩИЕ ЦЕПИ 28 Интегрирующей называют цепь, у которой постоянная времени (=RC) во много раз больше длительности входных импульсов, а выходное напряжение образуется на конденсаторе (рис. П3, а). Для схемы, приведенной на рис.П3,а, выходное напряжение t u вых 1 2 u C iC dt. C t1 (П9) согласно закону Ома, для участка последовательной цепи ток iC iR uR / R, (П10) t следовательно, u вых t 1 2 12 u dt u R dt R CR t1 t1 (П11) При условии Tи напряжение uC за время существования входного импульса возрастает незначительно, поэтому им можно пренебречь и считать, что uвх=uR в интервале от t1 до t2 (рис. П3, б). В этом случае формула (П11) можно записать t 12 (П12) u вых u вх dt t1 U max U max U max т. е. в интервале соответствующего промежутка времени выходное напряжение пропорционально интегралу от входного напряжения, что и определило название цепи. Как видно из рис. П3, б, амплитуда i3 В х U вх выходного напряжения Uвых пропорциTи ональна длительности прямоугольного Tи ip RВых Tи импульса, поступающего на вход интеt грирующей цепи. Большим недостатt4 t5 t6 t1 t2 t3 i p -+ С ком этой схемы является то, что по U вых окончании входного импульса требуется довольно большое время t T=(3+5)Tи для возврата интегрируt1 t2 t3 t4 t5 t6 а) б) ющей цепи в исходное состояние. При U Вх вх импульсах, разделяемых паузами неi3 большой продолжительности Tи R t Вых (рис.П3,г), необходим быстрый возt1 t2 г) врат интегрирующей цепи в исходное + ip U заряд состояние. Для выполнения этого треС вых бования применяют шунтирование U вых резистора R диодом VD для исключеразряд t t1 t2 T=(3/5) Г ния резистора R из цепи разряда конд) в) Tи денсатора C (рис.П3,в). Графики (рис.П3,г) иллюстрируют результат инРис. П3. Интегрирующая цепь (а) с графиками тегрирования прямоугольных импульвходного и выходного напряжения (б); интегрирующая цепь с шунтирующим диодом (в) и графисов различной длительности. Штрихоками входного и выходного напряжения (г). выми линиями показаны выходные напряжения при идеальном интегрировании, когда соблюдается условие Tи. Отклонение экспоненты на участке t3 t4 от штриховой линии происходит вследствие нарушения условия Tи для импульса наибольшей продолжительности, что приводит к возрастанию ошибки интегрирования из-за нелинейности используемого участка экспоненты. Интегрирующие цепи применяют главным образом для подавления коротких импульсных помех значительной амплитуды; кроме того, обладая способностью переводить разницу длительностей входных импульсов в различие их используют для селекции (отбора) импульсов по длительности. 29 РЕКОМЕНДОВАНА ЛІТЕРАТУРА: 1. Забродин Ю.С. Промышленная электроника: учебник для ВУЗов. – М.: Высшая школа, 1982. – 496с. 2. Методические указания к лабораторным работам по курсу «Электротехника и основы радиоэлектроники». А.П. Хорольский, В.П. Хорольский. - Кривой Рог: КГРИ, - 1988. 3. Карлащук В.И. Электронная лаборатория на IBM PC. – М.: Солон-Р, 1999. – 509с. 4. Панфилов Д.И. Электротехника и электроника в экспериментах и упражнениях. Т.2. – М.: Додэка, 2000. –287с. 30 Методичні вказівки до виконання стендових лабораторних робіт курсу "Промислова електроніка та мікропроцесорна техніка". Частина 2 Укладач: Щокін Вадим Петрович Реєстраційний № ______ Підписано до видання _______________ 201_р. Формат А5 Обсяг 42 стор. Тираж 25 примірників Видавничий центр ДВНЗ «КНУ», вул. ХХІІ Партз’їзду, 11, м. Кривий Ріг 31