1.9. Решить задачу графически. , 1 2
реклама

1.9. Решить задачу графически.
x1 2 x2 1,
3 x1 x2 1,
x1 x2 2,
x1 0, x2 0,
f ( X ) x1 x2 min .
Решение:
Выберем на плоскости систему координат с центром в точке О(0;0) и осями координат х1
и х2. Неравенствам x1 0, x2 0 соответствует первая четверть координатной плоскости.
Неравенству x1 x2 2 соответствует полуплоскость, ограниченная прямой x1 x2 2 .
x1 x2 2
x1 0 x2 2
x2 0 x1 2
Подставим в неравенство координаты т. О(0;0): 0 0 2 (верно). Неравенству x1 x2 2
удовлетворяют точки, лежащие на прямой x1 x2 2 , а также точки лежащие в одной
полуплоскости с т. О(0;0) относительно прямой.
Неравенству 3x1 x2 1 соответствует полуплоскость, ограниченная прямой
3x1 x2 1.
3x1 x2 1
x1 0 x2 1
x2 2 x1 1
Подставим в неравенство координаты т. О(0;0): 0 0 1 (верно). Неравенству
3x1 x2 1 удовлетворяют точки, лежащие на прямой 3x1 x2 1, а также точки
лежащие в одной полуплоскости с т. О(0;0) относительно прямой.
Неравенству x1 2 x2 1 соответствует полуплоскость, ограниченная прямой x1 2 x2 1 .
x1 2 x2 1
x1 1 x2 0
x2 1 x1 1
Подставим в неравенство координаты т. О(0;0): 0 0 1 (неверно). Неравенству
x1 2 x2 1 удовлетворяют точки, лежащие на прямой x1 2 x2 1 , а также точки не
лежащие в одной полуплоскости с т. О(0;0) относительно прямой.
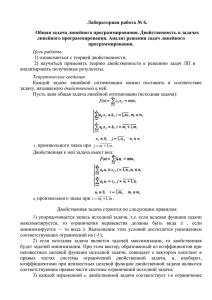
Полученную область выделим штриховкой (ABCD).
Функция f ( X ) x1 x2 достигает своего минимума в вершинах найденной области.
Найдем координаты вершин. Из чертежа видно, что А(1;0), В(0;1), D(2;0). Найдем
координаты точки С.
Точка С – точка пересечения прямых x1 x2 2 и x1 2 x2 1 .
x1 x2 2
x 2 x2
x 3
1
1
x1 2 x2 1 2 x2 1
x2 1
Следовательно, С(3;-1).
Найдем значения функции в вершинах области.
f (0;1) 0 1 1 f (1;0) 1 0 1 f (2;0) 2 0 2 f (3;1) 3 1 4
Наименьшее значение функция принимает в точке В(0;1). Следовательно, В(0;1) –
решение задачи.
2.9 Для задачи линейного программирования составьте двойственную, решите ее
симплексным методом и укажите оптимальное решение исходной задачи.
3 x1 5 x2 7 x3 8
4 x 2 x 8 x 9
1
2
3
x1 0, x2 0, x3 0
x0 90 x1 100 x2 175 x3 min
а) Составить к данной задаче двойственную x0 90 x1 100 x2 175 x3 min
3 x1 5 x2 7 x3 8
4 x 2 x 8 x 9
1
2
3
x1 0, x2 0, x3 0
б) Решить двойственную задачу симплексным методом.
Решение:
составим к исходной задаче двойственную задачу:
1. столбцы свободных членов в ограничениях прямой задачи являются коэффициентами
перед переменными целевой функции в двойственной задаче;
2. коэффициенты целевой функции прямой задачи стали столбцом свободных членов в
ограничениях двойственной задачи;
3. количество переменных в двойственной задаче равно количеству ограничений в
прямой задаче;
4. количество ограничений в двойственной задаче равно количеству переменных в
прямой задаче;
5. матрица коэффициентов перед переменными в двойственной задаче есть
транспонированная матрица коэффициентов перед переменными в прямой задаче;
6. так как целевая функция в прямой задаче стремится к максимуму, то в двойственной
задаче она стремится к минимуму.
Таким образом, двойственную задачу линейного программирования для данной
исходной задачи можно записать следующим образом:
8 y1 9 y2 max
3 y1 4 y 2 90
5 y 2 y 100
1
2
7 y1 8 y 2 175
y1 , y 2 0
б) Решим двойственную задачу симплексным методом.
3 y1 4 y 2 90
5 y 2 y 100
1
2
, 8 y1 9 y2 max
7
y
8
y
2 175
1
y1 , y 2 0
Приведем систему к каноническому виду:
3 y1 4 y 2 y 3 90
5 y 2 y y 100
1
2
4
, z 8 y1 9 y 2 0 y3 0 y 4 0 y5 max
7
y
8
y
y
2
5 175
1
y1 , y 2 0
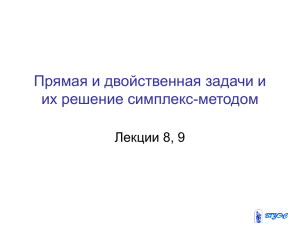
Составим симплексную таблицу.
Ci
Базисные переменные
0
y3
8
y1
3
-9
y2
4
0
y3
1
0
y4
0
0
y5
0
z
bi
90
2
0
1
5
y4
7
8
0
0
y5
-8 9
0
0
есть <=0, поэтому опорный план не является оптимальным.
90 100 175
min ,
,
7
3 5
0
1
100
175
0
0
0
0
Базисные переменные
0
y3
8
y1
0
8
y1
1
0
y5
0
0
Ci
-9
y2
14
5
2
5
26
5
61
5
0
y3
1
0
0
0
все >0, поэтому опорный план является оптимальным.
0
y4
3
5
1
5
7
5
8
5
0
y5
0
0
1
0
z
bi
90
8
20
175
8
160
yопт ( y1 , y 2 ) 20,0
z ( y) max 160
оптимальное решение исходной задачи: z( x) min 160 .
3.9. Решить транспортную задачу. Заданы мощности поставщиков аj (j = 1, 2, 3), емкости
потребителей bj (j = 1, 2, 3) и матрица стоимостей перевозок единицы продукции от
каждого поставщика каждому потребителю. Требуется найти план перевозок, при котором
суммарные транспортные затраты будут наименьшими.
bj
25
19
21
аj
40
5
3
6
17
2
1
2
23
7
4
8
Решение:
Перепишем матрицу в более удобном для расчетов виде.
bj
b3
b1
b2
ai
5
3
6
2
1
2
7
4
8
a1
a2
a3
25
a
b
19
i
40 17 23 80
j
25 19 21 65
40
17
23
21
i
j
Так как
a > b
i
j
( 80 65 ), то добавим фиктивного потребителя b'4 с потребностями,
j
i
объем которых равен 15, и стоимостями равными 0. Методом наименьших стоимостей
составим первоначальный опорный план.
bj
ai
a1 (40)
b1 (25)
25
5
b2 (19)
b3 (21)
b' 4 (15)
3
6
0
2
0
2
2
a 2 (17)
a 3 (23)
13
1
17
7
4
8
8
15
0
m+n-1=4+3-1=6
План является невырожденным.
Найдем оптимальный опорный план с помощью методов потенциалов:
u i v j Cij
(для занятых клеток)
u i v j C ij 0 (для незанятых клеток)
bj
b1
ai
5
a1
b3
b2
25
2
a2
3
2
+
17
7
a3
1
-
13
4
b' 4
6
2
8
v1 5
v2 3
0
15
15
21
19
0
+
8
25
0
v3 6
40
u1 0 (начальное условие)
17
u2 2
23
u3 2
v4 2
Вычислим оценки свободных клеток: ij ui v j Cij
21 u2 v1 C21 2 5 2 1 0
23 u2 v3 C23 2 6 2 2 0
31 u3 v1 C31 2 5 7 0
32 u3 v2 C32 2 3 4 1 0
Так как 21 , 23 , 32 0 , то план не является оптимальным.
Составим цикл из клетки (2;3), чтобы перераспределить перевозки.
min{13;17}=13
Получим новый опорный план.
bj
b1
ai
a1
25
5
+
-
15
2
a2
b3
b2
4
6
0
2
0
8
0
+
1
7
a3
3
b' 4
4
25
19
v1 5
v2 3
13
8
21
v3 4
15
15
40
u1 0 (начальное условие)
17
u2 2
23
u3 4
v4 4
Вычислим оценки свободных клеток:
13 u1 v3 C13 0 4 6 2
21 u2 v1 C21 2 5 2 1 0
31 u3 v1 C31 4 5 7 2 0
32 u3 v2 C32 4 3 4 3 0
Так как 21 , 31 , 32 0 , то план не является оптимальным.
Составим цикл из клетки (2;1), чтобы перераспределить перевозки.
min{25;4}=4
Получим новый опорный план.
bj
b1
ai
5
a1
21
4
2
a2
+
a3
b3
b2
19
3
1
7
4
13
8
b' 4
6
0
2
0
+
8
-
21
25
19
v1 5
v2 3
v3 5
0
15
15
40
u1 0 (начальное условие)
17
u2 3
23
u3 3
v4 3
Вычислим оценки свободных клеток:
13 u1 v3 C13 0 5 6 1
22 u2 v2 C22 3 3 1 1
31 u3 v1 C31 3 5 7 1 0
32 u3 v2 C32 3 3 4 2 0
Так как 31 , 32 0 , то план не является оптимальным.
Составим цикл из клетки (3;1), чтобы перераспределить перевозки.
min{8;4}=4
Получим новый опорный план.
bj
b3
b1
b' 4
b2
ai
a1
21
5
+
19
2
3
7
1
4 25
v1 5
0
2
0
8
0
-
a2
a3
6
4
+
19
v2 3
17
4
21
v3 6
15
15
40
u1 0 (начальное условие)
17
u2 4
23
u3 2
v4 2
Вычислим оценки свободных клеток:
13 u1 v3 C13 0 6 6 0
21 u2 v1 C21 4 5 2 1
22 u2 v2 C22 4 3 1 2
32 u3 v2 C32 2 3 4 1 0
Так как 32 0 , то план не является оптимальным.
Составим цикл из клетки (3;2), чтобы перераспределить перевозки.
min{19;4}=4
Получим новый опорный план.
bj
ai
a1
b1
25
b3
b2
5
15
2
3
1
a2
7
a3
4
4
+
17
4
b' 4
6
+
2
0
8
0
-
21
25
19
v1 5
v2 3
0
v3 7
15
15
40
u1 0 (начальное условие)
17
u2 5
23
u3 1
v4 1
Вычислим оценки свободных клеток:
13 u1 v3 C13 0 7 6 1 0
21 u2 v1 C21 5 5 2 2
22 u2 v2 C22 5 3 1 3
31 u3 v1 C31 1 5 7 1
Так как 13 0 , то план не является оптимальным.
Составим цикл из клетки (1;3), чтобы перераспределить перевозки.
min{15;4}=4
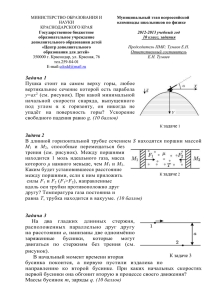
Получим новый опорный план.
bj
ai
a1
b1
25
b3
b2
5
11
2
3
7
1
8
6
0
2
0
8
0
4
a2
a3
b' 4
17
4
25
19
v1 5
v2 3
21
v3 6
15
15
40
u1 0 (начальное условие)
17
u2 4
23
u3 1
v4 1
Вычислим оценки свободных клеток:
21 u2 v1 C21 4 5 2 1
22 u2 v2 C22 4 3 1 2
31 u3 v1 C31 1 5 7 1
33 u3 v3 C33 1 6 8 1
Так как все оценки 0, то план является оптимальным.
25 11 4
X 0 0 17
0 8 0
f опт 25 5 11 3 4 6 17 2 8 4 125 33 24 34 32 248
5.9. Найти кратчайший путь от вершины х0 до всех остальных вершин графа. Граф
описывается перечнем всех своих дуг хiхj и их длинами lij. Дуга хiхj кратко обозначается
парой чисел i, j, длина lij задается одним числом. Так, например, дуга х3х5 обозначается
парой чисел 3, 5 и т.п.
0,1 0,2 0,3 1,2 1,6 2,5
2,7 3,4 4,8 5,4 5,8 6,2 6,5 6,7 7,8
17
11
12
13
21
6
8
16
14
9
10
23
9
17
21
Решение:
Путь от вершины х0 до вершин х1, х2, х3 задан в условии задачи (см. таблицу):
01 17
02 11
03 12 .
Найдем путь от вершины х0 до всех оставшихся вершин графа - х4, х5, х6, х7, х8.
Запишем наиболее кратчайшие пути до вершины х4: x04 x03 x34 , x04 x02 x25 x54 .
Найдем длину каждого пути: 04 03 34 ( 04 12 16 28 ), 04 02 25 54
( 04 11 6 9 26 ). min{ 28;26} 26 . Значит, кратчайшим путем является путь
x04 x02 x25 x54 , длина которого равна 26.
Кратчайший путь до вершины х5: x05 x02 x25 , его длина - 05 02 25 11 6 17 .
Запишем наиболее кратчайшие пути до вершины х6: x06 x01 x16 , его длина 06 01 16 17 21 38 .
Кратчайший путь до вершины х7: x07 x02 x27 , его длина - 07 02 27 11 8 19 .
Запишем наиболее кратчайшие пути до вершины х8: x08 x02 x25 x58 ,
x08 x02 x27 x78 , x08 x03 x34 x48 . Найдем длину каждого пути: 08 02 25 58
( 08 11 6 10 27 ), 08 02 27 78 ( 08 11 8 21 40 ), 08 03 34 48
( 08 12 16 14 42 ). min{ 27; 40;42} 27 . Значит, кратчайшим путем является путь
08 02 25 58 , длина которого равна 27.