прилож. к ж. «АиФА» №2, 2005г - БФГ
реклама

СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
ДИНАМИЧЕСКИЕ МОДЕЛИ
ЭКОНОМИЧЕСКИХ СИСТЕМ
Царьков В.А., к.т.н., начальник «Аналитического
управления»
КБ «БФГ-Кредит»
ВВЕДЕНИЕ
Динамические модели описывают траектории развития комплекса показателей, характеризующих состояние экономического объекта (предприятия, отрасли,
национальной экономики и др.) в зависимости от аргумента времени. Экономическая кибернетика для построения таких моделей использует операторные методы, впервые примененные для решения динамических
задач в электротехнике и автоматике [1, 2].
В общем виде суть операторного метода можно представить следующим образом. Основные показатели
экономических объектов (ресурсы, расходы, доходы,
налоги и т.д.) представляются скалярными векторами,
отражающими величину стоимости ресурсов или потоков стоимости в единицу времени. Начальное состояние экономической системы, обозначаемое состоянием
входа х, преобразуется в состояние выхода у. Такое
преобразование представляется в виде равенства:
у = Т х.
( 1)
Символ Т называется оператором преобразования.
Оператор – это правило, которое определяет, что нужно
сделать с вектором х на входе, чтобы получить состояние у на выходе. Графически такое преобразование
представляется в виде, показанном на рис. 1.
x
y
T
Рис. 1. Графическое представление
преобразования х в у оператором Т
В дальнейшем для построения экономических моделей будем применять линейные операторы. Линейные
операторы удовлетворяют следующим условиям:
Т(а х) = аТ(х);
( 2)
Т(х +z) = Т(х) + Т(z).
( 3)
Условия должны выполняться для всех х и z рассматриваемого множества, также для любой постоянной а.
Условие (2) означает, что преобразование величины
ах равнозначно преобразованию вектора х с последующим умножением полученного результата на константу а. Другими словами, константу можно вынести за
знак оператора.
Условие (3) означает, что линейные операторы обладают свойством аддитивности: преобразование суммы эквивалентно преобразованию слагаемых.
Простейший линейный оператор – оператор пропорционального преобразования. Такой оператор преобразует состояние входа х в состояние выхода у посредством умножения состояния входа на некоторое действительное число к, следовательно, у = kх . В данном
случае оператор – это правило: «умножить х на k».
2’2005
1. ЛИНЕЙНЫЕ ОПЕРАТОРЫ НА
ОСНОВЕ ПРЕОБРАЗОВАНИЙ
ЛАПЛАСА
Исследуемые модели относятся к классу линейных.
Они описываются системой линейных интегродифференциальных уравнений. Блок схемы моделей
состоят из скалярных векторов и линейных операторов,
отображающих эти уравнения. Вектора и операторы
преобразования представляют функции изображения,
получаемые на основе преобразования временной
функции по формуле прямого преобразования Лапласа
[3]. Аргументом функции изображения является комплексная переменная s:
F(s) = f ( t )e
st
dt .
0
Функция f(t) вычисляется по формуле обратного преобразования Лапласа:
f(t) =
1
2 j
c0 j
F ( s )e
st
ds .
c0 j
Каждой функции F(s) соответствует функция оригинала f(t). Соответствие функции изображения F(s) функции оригинала f(t) обозначается с помощью знака соответствия (÷):
F(s) ÷ f(t)
( 4)
или, что то же
f(t) ÷ F(s).
( 5)
В литературе применяется также другая форма записи преобразования Лапласа. Прямое преобразование
записывается в виде:
L[f(t)] = F(s);
( 6)
обратное преобразование Лапласа в виде:
L-1 [F(s)] = f(t).
( 7)
Операторы преобразования на основе функции изображения по Лапласу представляют передаточную
функцию W(s) от комплексной переменной s. Передаточной функцией называется отношение изображения
по Лапласу выходной величины у(s) операторного звена к изображению входной величины х(s) при нулевых
начальных условиях.
W(s) = у(s)/ х(s).
( 8)
Графически преобразование соответствующее (8)
может быть представлено в виде блок-схемы, представленной на рис. 2.
x(s)
y(s)
W(s)
Рис. 2. Блок-схема преобразования функций
изображения х(s) в у(s)
Величина у(s) на рис. 2 вычисляется путем простого
перемножения:
у(s) = х(s) W(s)
( 9)
Если известны входная функция х(s) ÷ х(t) и передаточная функция изображения W(s), оригинал функции
у(t) может быть вычислен по формуле
у(t) = L-1[у(s)] = L-1[х(s) W(s)]
( 10)
Для решения прикладных аналитических задач определение оригинала у(t) осуществляется с помощью
таблиц операционных соответствий, которые, как пра-
118
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
вило, достаточны для большинства прикладных задач
моделирования. Минимальный перечень таких соответствии, достаточный для исследуемых в работе моделей, представлен в приложении 1.
2. ЭЛЕМЕНТАРНЫЕ
ОПЕРАТОРЫ
К элементарным операторам отнесем минимальный
набор простейших передаточных функции изображений, необходимых для построения структурных блоксхем экономических объектов. Такими звеньями являются:
оператор пропорционального преобразования;
оператор дифференцирования;
оператор интегрирования;
оператор чистого запаздывания;
оператор суммирования.
Оператор интегрирования
Операция интегрирования является обратным преобразованием операции дифференцирования. В пространстве изображений над операторами возможны алгебраические действия. Поскольку интегрирование является операцией обратной дифференцированию, ее
изображение получается возведением последней в
степень (-1), то есть
х(t)dt ÷ W(s) = s-1 = 1/s.
t
Графически преобразование входного вектора оператором интегрирования показано на рис. 5.
x(s)
y(s)
1/s
Рис. 5. Блок-схема операции интегрирования
Этих операторов достаточно, чтобы отразить в пространстве изображений по Лапласу все линейные преобразования с временными функциями оригиналами.
Ниже приведем описание этих операторов и указаны
возможные объекты их применения для моделирования
экономических процессов.
Оператор пропорционального
преобразования
Оператор чистого запаздывания
Оператор пропорционального преобразования отражает операцию умножения функции оригинала х(t) на
постоянное действительное число k: у(t) = kх(t). В пространстве изображений эта операция запишется виде
равенства: у(s) = kх(s). Графически операция отражается в виде блок схемы на рис. 3.
оператор W ( s ) e s . Операция отображается урав-
x(s)
нением y ( s ) e s x ( s ) .
Блок-схема операции представлена на рис. 6.
y(s)
x(s)
Рис. 3. Блок-схема операции пропорционального
преобразования
входной вектор – прибыль предприятия, оператор – процент налогообложения, выходной вектор – налоговые платежи;
входной вектор – ресурсы предприятия, оператор – частота
оборачиваемости, выходной вектор – поток ресурсов;
входной вектор – активы банка, оператор – доходность активов в %/год, выходной вектор – поток доходов.
Оператор преобразует х(t) в выходной вектор у(t) в
соответствии с уравнением: у(t)=dх(t)/dt. В пространстве изображений оператор дифференцирования
W(s)=s, следовательно, операция запишется в соответствии с (9) в виде у(s) = sх(s). Блок-схема преобразования с оператором дифференцирования показана на
рис. 4.
x(s)
y(s)
s
Рис. 4. Блок-схема операции дифференцирования
Примеры объектов применения:
входной вектор – оборотные средства, выходной вектор –
поток расходов оборотных средств;
входной вектор – денежные остатки на расчетном счете,
выходной вектор – поток платежей с расчетного счета (при
допущении непрерывного характера потоков)
y(s)
e s
Рис. 6. Блок-схема операции с чистым
запаздыванием
Примеры объектов применения:
Оператор дифференцирования
входной вектор – поток прибыли, выходной вектор – прирост капитала;
входной вектор – поток выпускаемой продукции, выходной
вектор – прирост запасов продукции на складе предприятия.
Оператор преобразует х(t) в выходной вектор
у(t) = х(t- ), моделируя временное чистое запаздывание на величину . В пространстве изображений
k
Примеры объектов применения:
Примеры применения:
входной вектор – инвестиции в строительство, выходной
вектор – ввод основных фондов;
входной вектор – авансовые платежи, выходной вектор –
поставки по авансовым платежам.
x1(s)
y(s)
...
xn(s)
a)
x1(s)
x2(s)
y(s)
+
xn(s)
б)
Рис. 7. Схемы графического представления операции суммирования
Оператор суммирования
Оператор преобразует входные вектора хi(t) в выходной вектор у(t) = хi(t) . В пространстве изображений
уравнение запишется в виде у(s) = хi(s). Графически
операция суммирования отображается двумя схемами,
представленными на рис. 7-а) и рис. 7-б).
119
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
Примеры объектов применения:
x(s)
W(s)
входные вектора – потоки доходов, выходной вектор –
суммарный вектор доходов;
входные вектора – потоки расходов – выходной вектор –
суммарный вектор расходов;
входные вектора – потоки доходов и расходов, выходной
вектор – прибыль.
3. ТИПОВЫЕ СХЕМЫ СОЕДИНЕНИЯ
ОПЕРАТОРОВ
Параллельное соединение операторов
При параллельном соединении операторов входной
вектор преобразуется несколькими операторами. Результаты преобразования суммируются (см. рис. 8). Результат преобразования вычисляется по формуле:
n
у(s) = х(s) Wi ( s )
( 11)
i 1
Из (11) следует, что параллельное соединение n операторов эквивалентно одному оператору с передаточной функцией
n
Wху(s) = Wi ( s ) .
x(s)
X
W2
y1(s)
y2(s)
y(s)
+
yn(s)
Рис. 8. Схемы графического представления
операции суммирования
Последовательное соединение
операторов
В схеме с последовательным соединением операторных звеньев выходные вектора служат входом следующего оператора (см. рис. 9)
Выходной вектор в этой структуре вычисляется из
уравнения:
n
у(s) = х(s) Wi ( s )
y(s)
+
Рис. 10. Параллельное соединение вектора
с оператором
В соответствии с блок- схемой (см. рис. 10), выходной
вектор равен:
у(s) = х(s)(1+W(s)).
( 13)
Из (13) очевидно, что связь выхода с входом можно
представить одним звеном с передаточной функцией
Wху(s) = (1+W(s)).
Блок-схема на рис. 10 применяется для моделирования ценообразования продукции, (услуг), налогообложении прибыли, начислении НДС и т. д. Например, при
налогообложении прибыли по процентной ставке получаем
W(х) = ; х2(s) = х(s),
а
у(s) = (1 - ) х(s).
В природе, в разнообразных технических и экономических системах очень часто входное состояние системы зависит не только от экзогенных (внешних) факторов, но и от состояния на выходе, которое воздействует
на его входное состояние. Простейший пример: закипающая вода в кастрюле заливает костер и тем самым
уменьшает воздействие костра на подогрев воды. Подобные системы с воздействием выходного вектора на
величину входного называются системами с обратной
связью.
Блок-схема системы с обратной связью приведена на
рис. 11.
x(s)
y(s)
WП(s)
+
X
y(s)
WOC(s)
yOC(s)
откуда следует, что последовательное соединение
звеньев можно заменить одним звеном с передаточной
функцией
n
Wху(s) = Wi ( s ) .
i 1
x(s)
...
W2
Wn
y(s)
Рис. 9. Последовательное соединение операторов
Параллельное соединение вектора с
оператором
Схема соединения показана на рис. 10.
120
x(s)
( 12)
i 1
Wn
x(s)
Обобщенная формула коэффициента
передачи в схеме с обратной связью
...
Wn
x1(s)
Блок-схема преобразования с обратной
связью
i 1
W1
2’2005
Рис. 11. Блок схема с обратной связью выхода с
входом
В этой блок-схеме вектор у(s) на выходе звена Wп(х)
через звено Wос(х) связан с входным вектором х(s). Так
называемый, вектор обратной связи
уос(s) = Wос(s) у(s),
( 14)
алгебраически складывается с входным вектором х(s).
В результате непосредственно на входе звена Wп(х)
будем иметь вектор, равный сумме двух векторов:
хт(s) = х(s) уос(s).
( 15)
В свою очередь, выходной вектор связан с вектором
хт(s) равенством:
у(s) = Wп(х) хт(s)
( 16)
Рассмотрев совместно три уравнения (14), (15) и (16),
получим уравнение, связывающее вектор у(s) на выходе блок-схемы с вектором х(s) на его входе:
Царьков В.А.
y( s )
Wп ( s )
x ( s ).
1 Wп ( s )Woc ( s )
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
( 17)
Таким образом, блок-схему с обратной связью можно
заменить схемой с одним оператором, с коэффициентом передачи Wоп(s), вычисляемой по формуле
Wп ( s )
(17*)
WОП ( s )
.
1 Wп ( s )Woc ( s )
Полученное уравнение (17*) лежит в основе теории обратной связи, широко применяемой в различных отраслях науки и техники: электротехнике, радиотехнике, электронике, автоматике, кибернетике. В теории обратной
связи принято называть цепочку из звеньев, осуществляющих преобразование входного вектора в выходной и
обратное преобразование, контуром обратной связи.
В контуре обратной связи выделяют цепь прямой связи и цепь обратной связи. Каждая из них может состоять из соединения нескольких звеньев. Оператор Wп(s)
называется оператором (звеном) прямого преобразования или оператором прямой связи, а оператор Wос(s)
оператором (звеном) обратного преобразования или
оператором цепи обратной связи. При сложении входного вектора в фазе с вектором уос(s) обратная связь
называется положительной, при сложении в противофазе – отрицательной.
Для схемы с положительной обратной связью коэффициент передачи эквивалентного звена Wоп(s) равен
Wп ( s )
( 18)
WОП ( s )
.
1 Wп ( s )Woc ( s )
Для схемы с отрицательной обратной связью в знаменателе знак минус поменяется на плюс. В этом несложно убедиться при выводе (18).
В экономике схема с обратной связью используется
для моделирования кругооборота финансов, капитала,
анализа динамики систем расширенного воспроизводства ресурсов и т.д.
Применение схемы с обратной связью
для моделирования инерционных
процессов
Запаздывание выхода относительно входа для непрерывных процессов отображается оператором
W ( s ) 1 /( 1 s ).
( 19)
Этот оператор широко применяется для моделирования инерционных процессов. Покажем, что этот оператор описывает поведение системы с обратной связью.
На рис. 12а и 12б представлены две схемы с обратной.
Подставим в (18) коэффициенты передачи прямой и
обратной цепи связи в соответствии с блок-схемами
рис. 12а и 12б. В результате получим, что обе схемы
реализуют коэффициент передачи между входным и
выходным вектором в соответствии с (19)
Определим временную функцию выходного вектора,
для случая, когда на вход эквивалентного звена с оператором (19) поступает
х(t) = хн1(t),
где
хн – константа;
1(t) –единичная, ступенчатая функция.
Функция изображения входного вектора будет равна
х(s) = хн/s.
Умножая входной вектор на коэффициент передачи
(19) получим для схемы рис. 12а и 12б :
y ( s ) x н /[ s( 1 s )].
xн(s)
x(s)
y(s)
1
+
X
y(s)
y(s)
s
yOC(s)
а)
xн(s)
x(s)
+
y(s)
1/
Y(s)
1/s
X
Y(s)
1
yOC(s)
б)
Рис. 12. Блок-схемы операции с непрерывным запаздыванием
Временная функция на выходе звена будет равна (см.
приложение 1):
y ( t ) x н [ 1 exp ( t / )].
Блок-схема на рис. 12а отображает преобразование
входного вектора в соответствии с решением дифференциального уравнения
y ( t ) x н dy ( t ) / d ( t ).
Блок-схема на рис. 12б отображает преобразование
входного вектора в соответствии с решением интегрального уравнения
t
y ( t ) x ( t ) ( 1 / ) x ( t )d ( t ).
0
В экономике инерционное звено апериодического типа с коэффициентом передачи (19) применяется для
отображения запаздывания потоков платежей от реализации продукции относительно потока произведенных
расходов на его производство, запаздывания потока поступлений на расчетные счета клиентов банка от потоков клиентских платежей и т.д.
4. МОДЕЛИРОВАНИЕ
ЭКОНОМИЧЕСКИХ ОБЪЕКТОВ
(СИСТЕМ)
Правила составления структурных схем
экономических объектов
Графическое изображение структуры экономических
систем открывает возможности творческого поиска вариантов моделей, адекватных анализируемым объектам.
Реальные объекты экономики характеризуются агрегированными экономическими показателями. При этом
существуют показатели на разных уровнях агрегирования. Например, доходы и расходы отдельных подразделений можно просуммировать и выявить взаимосвязь
между доходом и расходами предприятия в целом. Соответственно, предприятие может быть представлено
несколькими моделями, отличающимися уровнем детализации. Другими словами, экономика предприятия может быть отражена комплексом моделей в зависимости
от целей анализа и системы показателей [4,5]. Графи-
121
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
ческий метод построения упрощает синтез адекватных
моделей различной степени детализации.
В технической кибернетике разработаны определенные правила графического построения моделей. Они
полезны и для моделей экономики.
Во-первых, следует определить независимые вектора,
зависящие от внешней среды. Эти вектора по существу
определяют исходные начальные условия динамики
развития системы. Чтобы выделить в блок-схеме независимые вектора от других – зависимых от внутренних
связей, начало стрелки соединяется с кружком, как показано на рис. 7б) для вектора х2(s).
Во-вторых, стрелки всех зависимых векторов должны
соединяться с входами одного или нескольких операторных звеньев или быть выходным вектором системы.
В-третьих, вектор может быть связан с входом одного
или нескольких операторов. В таком случае рисуется
второй вектор, связанный с первым, так называемым,
узлом в точке раздвоения вектора (см. х(s) на рис. 8).
В-четвертых, для построения сложных многозвенных,
содержащих большое число операторов, применяются
типовые схемы соединения операторов.
В дальнейшем будем рассматривать модели непрерывного типа, в которых величины ресурсов (капитала) и
их потоков (доходов, расходов, амортизации) принимаются равными средней величине за период. В качестве
периода усреднения, как правило, будем использовать
месяц, квартал или год. При этом измерять ресурсы
(оборотный капитал, привлеченный капитал, основные
фонды) будем в рублях, а потоки ресурсов (доходы, расходы, амортизацию, прибыль) – в рублях за год. Другими
словами, размерность измерения ресурсов будет равна
[руб], а размерность потока ресурсов – [руб./год].
4.1. Динамические модели простых
экономических объектов
Модели амортизации основных фондов
Блок-схема модели должна отразить динамику изменения стоимости основного капитала в процессе его
амортизации. Динамика изменения стоимости капитала
будет зависеть от способа начисления амортизации.
Для каждого способа будет соответствовать своя блоксхема амортизации.
Рассмотрим модель с начислением амортизации пропорционально начальной (входной) величине основного
капитала и вторую модель с начислением пропорционально текущей величине, за вычетом амортизации.
Для первой модели блок-схема представлена на рис.
13. Она аналогична типовой блок схеме на рис. 10, с той
разницей, что параллельный вектору оператор состоит
из 2-х звеньев.
Блок-схема конструируется в соответствии с последовательностью проводимых операций. Первое звено отражает операцию начисления амортизации. Умножая
основной капитал (вектор Кфн(s) [руб]) на передаточную
функцию первого звена W 1 / сл [1/год] получим вектор потока
y a ( s ) Kфн ( s ) / сл [руб./год].
Вектор потока поступает на вход звена интегрирования. Вектор на выходе звена интегрирования
К Ф ( s ) Kфн ( s ) / сл s.
вычитается из вектора основного капитала Кфн(s).
122
2’2005
Таким образом, на этом примере убеждаемся, что
операции с векторами в пространстве изображений однозначно соответствуют операциям с векторами в пространстве времени. Иначе говоря, для конструирования
блок-схемы достаточно понимания и знания содержательной части преобразований входных, независимых
векторов и их взаимосвязей. По существу создание
операторной модели объекта заключается в разработке
блок-схемы на основе изучения последовательности
реальных операций.
К Ф ( s )
ya(s)
1 / сл
1/s
X
+
Кфн(s)
КФТ(s)
Рис. 13. Блок-схема амортизации пропорционально
начальной величине основного капитала
Дальнейшие расчеты изображений векторов и определение уравнений динамики изменений показателей
(векторов) в зависимости от времени требует от аналитика в основном технических знаний составления на основе анализа блок-схемы алгебраических уравнений
функций изображений от аргумента s и последующего
определения из таблиц соответствия функций оригинала.
Поскольку первая часть задачи моделирования процесса амортизации нами выполнена, приступим к 2-му
этапу –- к определению функции изображения выходного
вектора текущего значения основного капитала.
Из блок-схемы элементарно вычисляется уравнение
для выходного вектора Кфт(s) в пространстве изображений по Лапласу
( 20)
KФТ ( s ) Kфн ( s )( 1 1 / сл s ).
Теперь допустим, что входной вектор поступает скачком, и он равен константе Кфн. Функция изображения
для входного вектора получим из соответствия Кфн1(t) ÷
1/s (см. таблицу соответствии в приложении 1) Следовательно, (20) будет иметь вид:
KФТ ( s ) Kфн ( 1 / s 1 / сл s 2 ).
( 21)
На этом 2-ой этап расчета заканчивается.
На третьем этапе находим соответствующую функцию
оригинала для (21) из приложения 1:
KФТ ( t ) Kфн ( 1 t / сл ).
( 22)
Уравнение (22) определяет динамику изменения величины основного капитала от времени при начислении
амортизационных расходов пропорционально начальной величине основного капитала. Однако оно не учитывает фактора снижения амортизируемой стоимости с
течением времени.
Для второго способа начисления амортизации модель
представлена блок-схемой на рис. 14. Модель аналогично блок-схеме с обратной связью, представленной
на рис. 11, содержит контур обратной связи.
В соответствии с (17), для уа(s) можно записать:
1 / сл
( 23)
ya( s )
Kфн ( s ).
1 1 / сл s
С другой стороны, из блок-схемы видим связь вектора
уа(s) с вектором Кфт (s) на входе звена прямого канала
( 24)
y a ( s ) KФТ ( s ) / сп .
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
Подставив уа(s) из (24) в (23), получим:
s
KФТ ( s )
K фн ( s ).
s 1 / сл
Kфн(s)
KФТ(s)
+
ya(s)
1 / сл
( 25)
ya(s)
X
1/s
KФ ( s )
Рис. 14. Блок-схема амортизации пропорционально
текущей величине основного капитала
Допустим, как и ранее, равенство Кфн (t) = Кфн*1(t), тогда Кфн (s) = Кфн/s, в результате, (25) запишется в виде:
1
( 26)
KФТ ( s )
Kфн .
s 1 / сл
Временную функцию, соответствующую (26), находим
из таблицы приложения 1.
KФТ ( t ) Kфн .e t / сл .
( 27)
Таким образом, при подаче на вход единичной ступенчатой функции 1(t), умноженной на объем капитала
К, в соответствии с (29) изображение для выходного
вектора будет равно:
y ( s ) K ( s )W ( s ) K ( s ) / K / s.
( 30)
В пространстве временных функций уравнению (29)
будет соответствовать уравнение
y ( t ) K / ,
то есть можно записать
K / y ( t ).
( 31)
Сопоставив (28) с (31), можно утверждать, что в модели кругооборота капитала постоянная времени
инерционного звена равна времени оборачиваемости
капитала.
Из этого утверждения следует, что трехзвенную блоксхему на рис. 15 можно заменить эквивалентной однозвенной схемой с коэффициентом передачи
W ( s ) 1 / об .
Однозвенная блок-схема представлена на рис. 16.
Итак, два способа начисления амортизации дают разную динамику изменения текущей величины основного
(внеоборотного) капитала.
K(s)
1 / об
Рис. 16. Однозвенная эквивалентная блок-схема
преобразования капитала в поток ресурсов
Обобщенная модель оборота капитала
Рассмотрим модель процесса оборачиваемости капитала. Нас будет интересовать поток ресурсов, обусловленный этим процессом. По определению средняя величина оборота об равна стоимости капитала К [руб],
деленному на величину потока стоимости ресурсов у:
( 28)
об K / y [год]
При моделировании процесса учтем преобразование
вектора капитала в вектор стоимости потока ресурсов
(капитала), затем учтем инерционность процесса оборота и обратное преобразование вектора стоимости потока в вектор стоимости капитала, возвращаемого на
вход системы.
Для преобразования капитала в поток ресурсов воспользуемся звеном дифференцирования (рис. 4). Инерционность движения ресурсов учтем с помощью инерционного звена (19). Для преобразования выходного потока в вектор капитала, поступающего на вход системы,
воспользуемся оператором интегрирования (рис. 5). В
результате получим блок-схему на рис. 15.
Оборот капитала является неотъемлемым свойством
экономических процессов воспроизводства. Как видим,
блок-схема на рис. 15 содержит контур обратной связи
аналогично модели на рис. 11. Определим коэффициент передачи
W(s) = у(s)/ К(s).
K(s)
KT(s)
+
x(s)
s
+
y(s)
1
1 s
X
y(s)
Модели налогообложения добавленной
стоимости
Возможны две модели налогообложения – модель с
рентабельностью относительно себестоимости продукции и модель с так называемой маржинальной рентабельностью относительно перенесенной стоимости.
В обоих случаях действуют исходные допущения:
перенесенная стоимость уПС и добавленная стоимость уДС
за минусом прибыли уп, то есть добавленные затраты уДЗ =
уДС - уп являются независимыми векторами,
перенесенная стоимость в составе выручки учитывается за
минусом уплаченного НДС (налог на добавленную стоимость)
добавленные затраты (зарплата, амортизация, прибыль и
др. текущие расходы) не содержит в своем составе НДС
Помимо этого, заранее отметим, что представленные
модели налогообложения содержат только операторы
пропорционального преобразования векторов. Поэтому
уравнения, описывающие взаимосвязи между векторами, будут справедливы, как для функции изображений,
так и для функции оригиналов.
Модель налогообложения на основе
рентабельности затрат
Блок-схема модели показана на рис. 17.
На рис. 17:
уПС – перенесенная стоимость;
уДЗ – добавленные затраты;
НДС – налог на добавленную стоимость;
y НДС – выплаты по налогу на добавленную стоимость;
1/s
K ( s )
Рис. 15. Блок - схема оборачиваемости капитала
В соответствии с (17) запишем
s /( 1 s )
1
W(s)
.
1 1 /( 1 s )
y(s)
( 29)
усп – себестоимость продукции;
р – рентабельность по себестоимости продукции;
ув = усп(1+р) – выручка от реализации продукции/услуг (валовой операционный доход);
уп – прибыль от реализованной продукции.
В блок-схеме на рис. 17 прибыль является функцией
от независимых векторов упс и удз, а также передаточных коэффициентов трех звеньев.
123
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
2’2005
yДЗ
НДС
X
yНДС
yПС+yДЗ
yПС
+
НДС
+
+
yсп
yП
+
+
X
yВ
1+p
Рис. 17. Модель налогообложения с рентабельностью затрат
yДЗ
НДС
X
+
yНДС
yПС+yДЗ
yПС
+
НДС
+
yсп
yП
+
+
+
yВ
1+pм
Рис. 18. Модель налогообложения с маржинальной рентабельностью
Из блок-схемы несложно убедиться в справедливости
уравнений:
уп = р усп ;
усп = уПС + уДЗ+ НДС уДЗ+ НДС уп.
Из совместного рассмотрения этих уравнений получим уравнение для расчета потока прибыли
уп = р((уПС + уДЗ(1+ НДС ))/(1 - р НДС ).
( 32)
Модель налогообложения на основе
маржинальной рентабельности
Под маржинальной рентабельностью рм будем понимать отношение (выраженное в долях или в %) добавленной стоимости к величине перенесенной стоимости,
то есть
рм = (ув - уПС)/ уПС.
Блок-схема модели налогообложения представлена
на рис. 18.
На рис. 18:
уПС – перенесенная стоимость;
уДЗ – добавленные затраты;
НДС – налог на добавленную стоимость;
уНДС –выплаты по налогу на добавленную стоимость;
усп – себестоимость продукции;
рм – маржинальная рентабельность продукции;
ув = уПС (1+рм) – выручка от реализации продукции /услуг
(валовой операционный доход);
уп – прибыль от реализованной продукции.
Из блок-схемы на рис. 18 несложно вывести следующие соотношения:
усп = упс + уДЗ + уДЗ НДС + уп НДС ;
уп = ув - усп = упс (1+ рм) – (упс + уДЗ +
+ уДЗ НДС + уп НДС ).
После решения системы из двух уравнений относительно потока прибыли уп, получим:
уп = упс рм/(1+ НДС ) - уДЗ.
( 33)
124
Уравнения (32) и (33) неприменимы к банковским
услугам, так как большинство банковских услуг реализуется без НДС.
4.2. Капитальные ресурсы и финансовые
потоки
Кругооборот капитала в экономической системе любого уровня по существу есть не что иное, как процесс,
протекающий в системе, содержащей цепочку из звеньев, охваченных положительной обратной связью. Капитал, поступающий на вход первого звена, пройдя цепочку преобразований (звеньев), через определенное время снова поступает на вход первого звена. Если при
этом в процессе своего движения по цепочке экономических звеньев, например, производственного звена и
звена реализации капитал увеличивается на величину
капитализированной части добавленной стоимости, то
такая система имеет тенденцию к расширенному воспроизводству.
Несмотря на дискретность отдельных операции (производственных, финансовых), связанных с кругооборотом капитала, при их относительно большом числе и
разновременности они образуют практически непрерывные потоки ресурсов, имеющих стоимостную оценку
в денежном выражении.
При измерении стоимости потоков ресурсов единица
измерения имеет размерность [руб./единица времени].
Как правило, используется единица с размерностью
[руб./год]. Потоки ресурсов образуются вследствие кругооборота капитала, состоящего из собственных и привлеченных ресурсов. Размерность единицы измерения
объема ресурсов (капитала) – [руб.].
Отношение потоков к объему капитала служит характеристикой интенсивности оборота (движения) или эффективности использования капитала. Экономические
характеристики, измеряемые в форме отношения потока к объему ресурсов, имеют размерность [1/год.] или
[%/год.]. Так, отношение потока добавленной стоимости
уДС к производственным активам Кп является показате-
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
лем их маржинальной доходности ЕДС, измеряемой в
относительных единицах размерностью [1/год.],
ЕДС = уДС / Кп [1/год] ,
( 34)
либо в процентах годовых
ЕДЗ = уДС*100% / Кп [% / год.].
( 35)
Отношение потока платежей yпр за привлекаемые (заемные ресурсы) Кпр может служить мерой стоимости
ресурсов, измеряемой в относительных единицах Епр:
Епр = упр / Кпр [1/год.]
( 36)
или в процентах годовых на 1 руб. привлекаемых ресурсов
Епр = уц*100% / Кпр [% / год.].
( 37)
Таким же образом можно учитывать интенсивность
расходов предприятия. Подсчитав величину потока хозяйственных расходов (добавленных затрат) уТ, учитываемых в составе добавленной стоимости, и объем капитала предприятия Кп, можем вычислить относительное значение расходов на 1 руб. капитала
ЕТ = уТ / Кп [1/год.]
( 38)
либо в процентах годовых на рубль активов (капитала)
ЕТ = уТ*100% / Кп [% / год.] .
( 39)
Величину ЕТ по аналогии с доходностью ЕДС будем
называть расходностью, либо относительным или процентным коэффициентом внутрихозяйственных расходов, либо нормой расходности (на руб. активов). Хозяйственные расходы уТ в сумме с расходами на оплату
привлеченного капитала упр равны добавленным затратам уДЗ = уТ+ упр.
Эффективность использования капитала предприятия
равна отношению текущего потока прибыли к его капиталу. Если по аналогии, ее обозначить прибыльностью
Еп = уп/ Кп, то будем иметь возможность из (32) с учетом
того, что уДС = упсрм определить эффективность работы
предприятия в виде уравнения
Еп = ЕДС/(1+ γНДС) ЕТ Епр.а ,
( 40)
где
Епр.а = упр / Кп [1/год.] – это относительная себестоимость привлеченных ресурсов на 1 руб. производственных активов.
Определим взаимосвязь Епр.а с Епр. Введем обозначения:
Ксп – объем собственных средств (активов) предприятия;
пр = Кпр / Ксп – коэффициент привлечения ресурсов.
Кп = Ксп + Кп = Ксп (1 + пр).
( 41)
Для вычисления (приближенного) годовых потоков
доходов (расходов) ежемесячные показатели можно
умножить на 12 (число месяцев в году). Например, вычислив ежемесячный объем добавленной стоимости
предприятия (уДС)мес, маржинальную доходность в процентах годовых нетрудно подсчитать по формуле
ЕДС = (уДС )мес*12*100% / Кп [ % / год.] .
( 43)
В дальнейшем отношение потока прибыли к ресурсам, измеряемое в процентах годовых, то есть имеющих размерность измерения [1/год], мы будем называть
эффективностью (прибыльностью) использования активов (капитала). Отношение потока прибыли к потоку
выручки (продаж) или к потоку себестоимости, измеряемое в процентных долях и, следовательно, не имеющее размерности, – будем называть, соответственно,
рентабельностью продаж или себестоимости (рентабельность затрат).
Иначе говоря, мы не будем пользоваться терминами
рентабельность активов, собственного капитала и т.п. в
связи с тем, что эти показатели отличаются размерностью измерения. Соответственно, показатели первого
типа будем обозначать символом Е, а показатели второго типа – символом р.
5. ДИНАМИЧЕСКИЕ МОДЕЛИ
ПРЕДПРИЯТИЯ
Главным исходным допущением при конструировании
динамической модели является непрерывный характер
потоков денежных платежей и поступлений на счета
предприятия (в дальнейшем слово поток иногда будет
опускаться). Такое допущение справедливо, если имеет
место достаточно большое число финансовых операций, и средние показатели вычисляются на достаточно
большом промежутке времени, например, равном одному месяцу.
Интегральные характеристики предприятия, такие как
ежемесячные доход, расходы, средняя величина собственного основного и оборотного капитала, привлеченных ресурсов, и др., являются достаточно стабильными агрегированными экономическими показателями
их деятельности, характерными для детерминированной системы. Очевидно, такое предприятие правомерно
рассматривать как детерминированную систему, параметры которой имеют свою динамику, взаимозависимость и свою траекторию изменения во времени, которую возможно в принципе как прогнозировать, так и
планировать [5,6].
Из совместного рассмотрения (40) и (41) с учетом
принятых обозначений несложно получить уравнение
Еп = ЕДС/(1+ НДС ) ЕТ Епр пр/(1+ пр).
( 42)
5.1. Обобщенная динамическая модель
предприятия
Уравнение (42) по существу характеризует статическую потоковую модель предприятия. Оно отражает
влияние ряда показателей на величину эффективности
использования капитала предприятия. Но оно не отражает динамику изменения прибыльности.
Вычислить показатели, входящие в уравнение, не
представляет особых затруднений. Из оборотносальдовой балансовой ведомости можно подсчитать за
определенный период, например, за месяц, цифры дохода, внутрихозяйственных расходов, процентные выплаты по привлечению ресурсов, а также средние за
месяц объемы привлеченных средств и собственного
капитала.
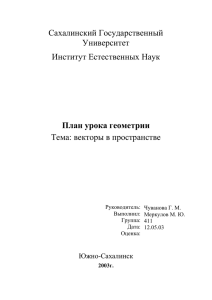
На рис. 19 представлена обобщенная блок-схема динамической модели воспроизводства производственного капитала предприятия (основного и оборотного).
Модель, содержит минимальный набор агрегированных показателей, определяющих динамику роста (убывания) производственного капитала предприятия .
Она содержит следующие звенья (операторы):
звено с коэффициентом передачи 1/об, преобразующее
вектор производственных активов Кп в вектор потока себестоимости усп реализованной продукции;
звено с коэффициентом передачи р, формирующее вектор
потока прибыли уп;
интегрирующее звено в цепи обратной связи с коэффициентом передачи 1/s, преобразующее вектор потока прибыли уп в вектор прибыли Yп нарастающим итогом;
125
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
звено капитализации прибыли с коэффициентом передачи
п, преобразующее Yп в прирост производственного капитала предприятия Кп.
Особенностью модели является свойство ее саморазвития после подачи вектора собственного начального
капитала Кпн. При выполнении равенства Кпн.система
остается в режиме покоя, все другие векторы равны нулю. После подачи на вход модели Кпн 0, система переходит из состояния покоя в состояние динамического
развития. Величина каждого вектора будет изменяться
со временем. Характер траектории изменения векторов
будет зависеть от параметров операторов, входящих в
блок-схему модели. Блок-схема модели позволяет вычислить аналитическое уравнение динамики изменения
каждого вектора в зависимости от времени, рентабельности, времени оборачиваемости капитала предприятия, доли капитализируемой прибыли и начальной величины капитала предприятия. На примере этой упрощенной (обобщенной) модели проиллюстрируем ход
решения задачи. Начнем с составления уравнений, задаваемых блок-схемой, приведенной на рис. 19. Составим уравнения для трех операторов суммирования.
На рис. 19:
Кпн – начальный капитал предприятия;
Кп(s) – текущий капитал предприятия;
об – время оборачиваемости капитала предприятия;
усп [руб./год] – поток себестоимости реализованной продукции предприятия;
р – рентабельность предприятия (прибыль/себестоимость
продукции);
ув = усп (1 + р) [руб./год] – поток выручки (операционного дохода) предприятия;
уп [руб./год] – поток прибыли;
Yп = уп /s [руб.] – прибыль предприятия нарастающим итогом;
п – коэффициент передачи, равный доле прибыли, направляемой на накопление капитала предприятия;
Кп = пYп [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования в пространстве изображений
Лапласа.
Для первого сумматора вместо вектора Кп(s) подставим его значение в виде произведения уп на коэффициенты передачи звеньев 1/s и п Аналогично поступим
при составлений уравнений для других операторов
суммирования. В результате получим три уравнения:
КПТ(s) = Кпн(s) + п уп /s;
( 44)
ув = КПТ(s)(1 + р)/об;
( 45)
уп = ув - КПТ(s)/об .
( 46)
Решение найдем для Кпн(s) = Кпн/s, что соответствует
подаче на вход скачком постоянной величины K пн . РеП
шая систему уравнений (44), (45), (46) относительно уп,
получим после преобразований
pK пн
( 47)
yп
.
об ( s п p / об )
Теперь определим изображения прироста капитала
Кп(s) = п уп /s
и текущей величины капитала (см. рис. 19)
Кпт(s) = Кпн(s) + Кп(s);
Kп ( s )
К п
п pK пн
;
об s( s п p / об )
KПТ ( s ) К пн / s
п pK пн
.
об s( s п p / об )
1 / об
( 51)
K ПТ ( t ) K пн e п pt / об .
( 52)
Уравнение динамики потока выручки и себестоимости
продукции теперь несложно вывести из блок-схемы на
рис. 19.
y сп ( t ) ( Kпн / об )e п pt / об ;
( 53)
y В ( t ) [ Kпн ( 1 p ) / об ] e п pt / об .
( 54)
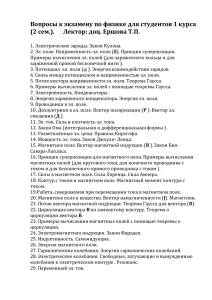
Траектории роста капитала
Вычисленные аналитические уравнения позволяют
построить траекторию развития экономики предприятия. Другими словами, построить траекторию изменения
основных агрегированных показателей предприятия. На
рис. 20 представлены графики траектории относительного роста /убывания капитала (К = КПТ(t)/Кпн ) для разных значений доли капитализированной прибыли - п=1,
п=0,3 и п=0. Траектории вычислены для времени оборота капитала об = 0,3 года и рентабельности р = 20%.
Очевидно, траектория п = 1 является верхней границей
множества траекторий, отличающихся величиной п при
условии положительной величины рентабельности.
1/s
YП
x
yП
р
yсп
+
+
yВ
Рис. 19. Обобщенная динамическая модель предприятия
126
( 49)
Kп ( t ) Kпн ( eпpt / об 1 );
КПТ(s)
+
( 48)
Запишем для функции изображений (47), (48), (49)
функции оригинала, определенные на основе таблицы
операторных соответствий, приведенной в приложении 1:
p п pt / об
( 50)
y п ( t ) K пн
e
;
об
р
КПН
2’2005
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
По определению эффективность использования капитала равна отношению текущей прибыли к текущему
значению капитала. Разделим левые и правые части
уравнений (50) и (52), в результате найдем
Еп = р/об .
( 56)
Теперь уравнения роста капитала (52) и темпа роста
(55) можно записать иначе:
( 57)
K ПТ ( t ) K пн e п Епt ;
= п Еп .
Рис. 20. Траектории относительного роста капитала
Отрицательная величина рентабельности приводит к
уменьшению капитала, что иллюстрируется траекторией п = 1; р = -0,2 (см. рис. 20). Верхние две траектории
на рис. 20 характерны для расширенного воспроизводства. Постоянная величина относительной величины К
= КПТ(t)/Кпн = 1 (прямая линия при п= 0) – свидетельствует о простом воспроизводстве капитала предприятия. Кривые, лежащие ниже линии п= 0, относятся к
режиму убыточного воспроизводства.
Обратим внимание читателя на то, что расширенное
воспроизводство капитала предприятия требует выполнения двух условий: во-первых, выполнения неравенства п>0, во-вторых, выполнения неравенства р>0.
Темпы роста и эффективность капитала
Полученные уравнения потоков ресурсов и капитала
иллюстрируют экспоненциальный характер траектории
роста экономики предприятия. Темп экспоненциального
роста определяется параметрами передаточных звеньев, являющихся агрегированными экономическими показателями предприятия.
Темп роста капитала предприятия определим по
формуле:
= dКПТ(t)/(dtКПТ(t)).
Из (52) несложно вычислить
= п р/об
( 55)
Три показателя однозначно определяют темп роста
/убывания капитала в процессе расширенного воспроизводства капитала: рентабельность, время оборота
капитала, доля капитализируемой прибыли.
Это уравнение является фундаментальным для любой экономической системы расширенного воспроизводства: предприятия, отрасли, национальной экономики. Блок-схема обобщенной модели адекватна процессам воспроизводства капитала независимо от
масштабов системы.
Обратим внимание на то, что одинаковых темпов роста можно достигать при разных сочетаниях величин п,
р, об. Предположим, ряд предприятий имеет одинаковый темп роста (наращивания) капитала. Но тогда, при
равенстве доли капитализации, те из них, которые имеют длительный цикл производства и реализации продукции, должны реализовать ее с большей рентабельностью.
Для торговых предприятий с большой частотой оборачиваемости капитала высокие темпы роста капитала
могут достигаться при значительно меньшей рентабельности, чем для производителей продукции, имеющих, как правило, длительный цикл производства и реализации конечной продукции.
( 58)
Как видим, динамика роста капитала в линейной модели расширенного воспроизводства определяется
эффективностью использования капитала Еп и доли капитализированной прибыли. Этот вывод на качественном уровне не нов. В данном контексте он подтверждает адекватность модели, что дает основание для применения полученных уравнений в аналитических
расчетах динамики развития разнообразных систем
воспроизводства капитала, (в том числе, отличающихся
масштабом) – предприятия, отрасли, экономики государства.
Эффективность инвестиций
В предыдущем разделе определено уравнение эффективности текущего капитала. Однако для инвестора
важно понять эффективность его начальных вложений
Кпн. Кроме того, может возникнуть вопрос: насколько
следует увеличивать капитализируемую долю прибыли? Не проще ли накапливать прибыль, получаемую в
режиме простого воспроизводства начального капитала?
Общепринято считать, что расширенное воспроизводство дает бòльшие накопления, чем простое. В данном
подразделе оценим, насколько выгоднее инвестировать
начальный капитал в расширенное, чем в простое воспроизводство.
Введем обозначение эффективности инвестиции Епн
= уп(t)/Кпн. Обозначим символом ( E пн ) п 0 эффективность начальных инвестиций при простом воспроизводстве, то есть когда п=0. Символом ( E пн ) п 0 обозначим эффективность инвестиций при расширенном воспроизводстве, когда выполняется условие п>0.
Искомые величины определим из уравнения (50),
( 59)
( E пн ) п 0 p / об ;
( E пн ) п 0 p / об e п Е п t .
( 60)
Таким образом, убеждаемся, что в случае расширенного воспроизводства эффективность инвестиции выше
в e п Е пt раз. Теоретически максимальная разница достигается при п=1, тогда будет выполняться равенство
( E пн ) п 1 E п e п Е п t .
( 61)
Применение обобщенной модели для
составления плана – прогноза развития
предприятия
Аналитические расчеты на основе линейных моделей
предполагают неизменность во времени параметров
операторов, являющихся качественными характеристиками экономики предприятия. В практической деятельности они, как правило, испытывают колебания. Тем не
менее, модель может существенно облегчить решение
практических задач расчета планов, прогнозов развития
127
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
предприятия. Пример аналитического расчета на основе электронной таблицы Exel приведен таблице под
названием «План-матрица развития предприятия».
План-матрица содержит показатели, приведенные в
обобщенной модели на рис. 19. Используются средние
значения показателей за месяц, измеренные на основе
ежемесячного баланса предприятия. Расчет значений
качественных показателей осуществляется на основе
фактических данных за три предыдущих месяца. Тем
самым в какой-то мере учитывается влияние разброса
показателей. Прогнозный период взят равным шести
месяцам.
Исходными, качественными, расчетно-плановыми показателями приняты показатели эффективности: рентабельность, время оборота капитала, доля капитализируемой прибыли. Экстраполяция первых двух показателей осуществляется по средней, скользящей величине
за три предыдущих месяца. Доля капитализации прибыли задается, исходя из задач планирования.
Лицо, принимающее решение, может внести корректировку этих данных. С этой целью он может внести в
ячейки по строке «рост/снижение рентабельности» и в
строку «снижение/рост оборота» соответствующие плановые или прогнозные изменения.
В ячейке «рост/снижение рентабельности» к базовой
расчетной рентабельности может быть добавлен плановый процент или наоборот вычтен. В ячейке «снижение/рост оборота» базовое расчетное время оборота
капитала может быть уменьшено/увеличено на величину пропорционально введенным процентам.
5.2. Модель предприятия с выделением
добавленной стоимости
Введение налога на добавленную стоимость делает
актуальным разработку моделей, учитывающих потоки
добавленной стоимости и налога на добавленную стоимость (НДС). Возможны разные варианты конструирования блок-схем модели (один из вариантов описан в
[17]). Например, можно ввести потоки платежей уплаченного НДС и потоки поступлений НДС от продажи
продукции. Можно учесть поток добавленной стоимости
и соответствующий ему пропорциональный поток НДС.
На рис. 21 показана блок-схема по второму варианту.
На наш взгляд, она наглядно отражает сущность НДС и
2’2005
его влияние на себестоимость продукции. Себестоимость продукции усп состоит из суммы: перенесенной
стоимости уПС (комплектующие, затраты энергии пр.),
добавленных затрат уДЗ (зарплата, аренда, прочие платежи не включающие НДС) и НДС - уНДС = н (уп + уДЗ). В
модели введены два независимых вектора, определяющих начальные, исходные условия. Это начальный
капитал Кпн(s) и начальная величина потока добавленных затрат уДЗ(s).
Выделение добавленных затрат из общей себестоимости продукции потребовало к перенесенной стоимости уПС отнести все расходы, сопровождаемые оплатой
НДС. В рассматриваемой модели поток оплаченной
стоимости НДС не учитывается, а величина перенесенной стоимости уПС учитывается по номиналу (то есть
без оплаченной НДС).
На рис. 21:
Кпн – начальный капитал предприятия;
КПТ(s) – текущий капитал предприятия;
об – время оборачиваемости капитала предприятия;
усп [руб./год] – поток перенесенной стоимости продукции
предприятия (расходы с НДС);
рм = (ув - уПС)/ уПС - маржинальная рентабельность перенесенных затрат;
ув= уПС(1+рм) [руб./год] – поток выручки (операционного дохода) предприятия;
уДЗ – поток добавленных затрат;
н – налог на добавленную стоимость;
ун [руб./год] – поток платежей по налогу на добавленную стоимость;
усп – поток себестоимости продукции;
уп [руб./год] – поток прибыли;
Yп = уп/s [руб.] – прибыль предприятия нарастающим итогом;
п – доля прибыли, направляемая на накопление капитала
предприятия;
Кп = пYп [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования в пространстве изображений
Лапласа.
В дальнейшем вычисления функции изображения
векторов будут опускаться. Читатель может осуществить вычисление приведенных уравнений для последующих блок-схем самостоятельно, пользуясь примером расчета для обобщенной модели в предыдущем
разделе.
Таблица 1
128
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
Запишем выражения для функции изображения прибыли, прироста капитала и текущей величины капитала,
принимая начальные величины капитала и потока добавленных затрат, равными константам Кпн и уДЗ:
K пн pМ / об ( 1 н ) y ДЗ
yп( s)
.
( 62)
s п pМ / об ( 1 н )
K ( s )
K ПТ ( s )
п [ K пн pМ / об ( 1 н ) y ДЗ ]
s [ s п pМ / об ( 1 н )]
( 63)
.
K пн
.
s п pМ / об ( 1 н )
( 64)
Функции оригинала уп(t), К(t), КПТ(t) определим из
таблицы соответствия приложения 1
уп(t) = (Кпнрм/об(1 + н) –
- уДЗ)ехрп рмt/об(1 + н);
( 65)
К(t) = (Кпн - уДЗоб(1 + н)/ рм)*
*( ехрп рмt/об(1 + н) - 1);
КПТ(t) = Кпн ехрп рмt/об(1 + н) –
-[ уДЗоб(1 + н)/рм][ехрп рмt/об(1 + н) ─ 1].
( 66)
( 67)
Представим экспоненциальную функцию в виде первых двух членов ряда Маклорена, тогда второе слагаемое в уравнении (67) можно значительно упростить.
Уравнение траектории роста капитала приближенно запишется в вид:
КПТ(t) Кпн ехрп рмt/об(1 + н) - уДЗ п t .
( 68)
Несложно убедиться, что траектория относительного
роста капитала (К = КПТ(t)/Кпн) в этой модели зависит
от величины отношения ЕДЗ дополнительных затрат к
величине начального капитала (ЕДЗ = уДЗ/ Кпн).
Модель предприятия на базе маржинальной рентабельности отражает привязку ценообразования к величине перенесенной стоимости Величина рентабельности продаж при постоянной величине маржинальной
рентабельности будет зависеть только от величины добавленных затрат уДЗ. Чем меньше добавленные затраты, тем больше прибыль и величина рентабельности
продаж независимо от объема перенесенной стоимости. Принятое условие (постоянство величины рм) меняет вид траектории роста капитала. Темп роста капитала в такой модели становится переменной величиной, изменяющейся со временем.
План – прогноз развития предприятия на
основе обобщенной модели с добавленной
стоимостью
Модель с добавленной стоимостью содержит большее число финансовых показателей по сравнению с
моделью без добавленной стоимости, рассмотренной
ранее. Соответственно, «План-матрица развития предприятия» будет более информативной, позволяя принимать управляющие решения по большему числу агрегированных показателей, характеризующих экономику предприятия.
Пример аналитического расчета на основе электронной таблицы Excel приведен в табл. 2. Так же как и в
предыдущей версии модели, в табл. 2 в качестве фактических данных используются средние значения показателей, измеренные на основе ежемесячного баланса
предприятия. Расчет прогнозных значений осуществляется на основе фактических данных за три предыдущих
месяца.
Исходными, расчетно-плановыми показателями приняты:
капитал предприятия;
добавленные затраты;
маржинальная рентабельность;
время оборота капитала;
доля капитализируемой прибыли.
Капитал предприятия в каждом последующем месяце
увеличивается на величину прироста, полученного по
итогам прошедшего месяца. Экстраполяция добавленных затрат и качественных показателей осуществляется, как правило, по средней, скользящей величине за
три предыдущих месяца плюс корректировка с учетом
тенденции их изменения.
Возможны другие методы расчета прогнозных, качественных параметров, в том числе учитывающих вероятностные методы. Например, в иллюстрируемой планматрице (табл. 3) время оборота для последующего
месяца вычисляется как средняя скользящая за три
предыдущих, взвешенная относительно величины добавленных затрат.
Лицо, принимающее решение, может внести дополнительную корректировку маржинальной рентабельности
и времени оборачиваемости. С этой целью он может
внести в ячейки по строке «рост/снижение маржинальной рентабельности» и в строку «снижение/рост оборота» соответствующие планируемые или прогнозные изменения.
Yп
п
1/s
yП
К ( s )
1+рм
+
н
н
+
yНДС
+
Кпн(s) КПТ(s)
1 / о
x
yсп
+
+
yВ
+
yсп
yДЗ(s)
Х
Рис. 21. Модель предприятия с учетом добавленной стоимости и НДС
129
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
2’2005
Таблица 2
В ячейке «рост/снижение маржинальной рентабельности» к базовой расчетной величине может быть добавлен или вычтен корректирующий процент. В ячейки
«снижение/рост оборота» для любого планового месяца
базовое расчетное время оборота капитала может быть
уменьшено/увеличено на величину пропорционально
введенному проценту. Остальные показатели рассчитываются на основе взаимосвязей, задаваемых блоксхемой модели на рис. 21.
Приведенная в таблице корректировка роста маржинальной рентабельности дает возможность учесть изменение планируемой цены продаж. Строка «Внешние
инвестиции» в табл. 2 иллюстрирует возможность
учесть в прогнозных данных влияние привлеченного капитала предприятия с учетом цены привлечения, увеличивающей добавленные затраты.
5.3. Многопараметрическая модель
предприятия
Рассмотренные модели содержат небольшое число
важнейших агрегированных финансовых параметров
предприятия: капитал, выручку, перенесенные и добавленные стоимости расходов, оборачиваемость и долю
капитализируемой прибыли. Перечень этих показателей
может оказаться достаточным руководителю высшего
звена предприятия для принятия глобальных решений,
но явно недостаточен для текущего управления. Для
текущего управления, помимо перечисленных параметров, нужно иметь информацию об основных фондах
(внеоборотном капитале), оборотном капитале, привлеченных ресурсах, амортизации фондов.
Ниже представлена многозвенная, многопараметрическая модель, позволяющая рассчитать основные финансовые показатели предприятия, как по ресурсам, так
и по доходам, расходам и прибыли, а также оценить
эффективность использования ресурсов по итогам работы за период (см. рис. 22).
На рис. 22:
130
Кпн [руб.] – начальный объем собственного денежного капитала;
КСТ [руб.] –текущий объем собственного капитала;
Клр [руб.] –объем заемных средств (привлеченных ресурсов);
КОК [руб.] – суммарный объем оборотного капитала;
Кф [руб.] –объем основных фондов Епр [%/год] – цена заемных средств в % годовых;
уПС [руб./год] – поток перенесенной стоимости в составе реализованной продукции, (услуг) предприятия;
рм – маржинальная рентабельность предприятия;
упр [руб./год] – поток платежей за привлеченные ресурсы (заемные средства);
уТ – поток текущих добавленных затрат (включая оплату труда работников) в составе добавленной стоимости;
уа [руб./год] – поток амортизационных начислений, учитываемый в себестоимости продукции предприятия;
н – доля налога на добавленную стоимость);
ун [руб./год] – поток платежей по налогу с добавленной стоимости;
уДЗ = упр + уа + уТ [руб./год] – суммарный поток добавленных
затрат;
Yа [руб.] – стоимость амортизации нарастающим итогом;
уп [руб./год] – поток прибыли;
Yп [руб.] – прибыль банка нарастающим итогом до налогообложения;
βп – доля прибыли, направляемая на накопление собственного капитала;
Yп [руб.] – прибыль, накопленная нарастающим итогом;
К [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования, преобразующий вектора денежных потоков в вектора накопленного капитала (денежных
средств с нарастающим итогом).
Блок-схема модели содержит четыре независимых
вектора: начальный собственный оборотный капитал
Ксн(s), внеооборотный капитал (основные фонды) Кф(s),
привлеченный капитал (заемные финансовые ресурсы)
Кпр(s), вектор текущих добавленных затрат уТ(s). Будем
рассматривать динамику развития для случая, когда независимые вектора равны постоянной величине, не изменяющейся со временем. В пространстве изображений эти вектора запишем в виде действительных чисел,
деленных на комплексную переменную s:
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
Кф
ya
1 / сл
Ya
Х
1/s
Yпн
Yп
п
+
yп
1/s
К
рм
н
+
н
+
yДС
КСН
КСТ
+
yн
КОК
+
yТ
1 / об
+
x
yпс
+
yВ
Х
+
-
yсп
yпр
+
yДЗ=yT+ya+yпр
Кпр
Х
Ен
Рис. 22. Многопараметрическая модель предприятия
Ксн(s) = Ксн /s;
Кф(s) = Кф/s;
Кпр(s) = Кпр/s;
yТ(s) = уТ/s.
( 69)
Основываясь на этих соотношениях, нетрудно убедится, что для вектора добавленных затрат также будет
справедливо
уДЗ(s) = уДЗ/ s,
где
уДЗ = уТ + Кф/сл + Кпр Епр,
( 70)
то есть уДЗ является также действительной величиной, равной сумме действительных величин текущих
добавленных затрат уТ, амортизации уа = Кф/сл, платы
за привлеченный капитал
упр = Кпр Епр.
При конструировании блок-схемы исходили из реальных взаимосвязей ресурсов с потоками расходов и доходов, налоговыми вычетами.
Наличие контура положительной обратной связи в
блок-схеме модели определяет ее главную особенность
– саморазвитие, обеспечивающее самовозрастание
собственного капитала и, соответственно, потоков доходов и расходов, а при определенных соотношениях
параметров и прибыли – источника роста капитала.
В исследуемой блок-схеме время оборачиваемости
не относится к потоку всех расходов. Оно служит для
установления взаимосвязи перенесенной стоимости с
величиной капитала предприятия. Для его определения
необходимо измерить за определенный период расходы предприятия, сопровождаемые оплатой НДС, определить на основе баланса среднюю за период величину
оборотного капитала предприятия. После чего, разделив капитал на величину расхода, приведенную к году,
иначе говоря, разделив на величину потока, измеренного в единицах с размерностью [руб./год], вычислить время оборачиваемости относительно перенесенной стоимости (комплектующих, расходных материалов, энергозатрат, услуг сторонних организаций и т.д.).
Себестоимость продукции предприятия в многопараметрической модели будет складываться (см. рис. 22)
из перенесенной стоимости плюс добавленные затраты
и расходы по налогу на добавленную стоимость. Разница между выручкой и себестоимостью в виде вектора
потока прибыли поступает в блок-схеме рис. 22 на вход
оператора интегрирования. На выходе интегрирующего
звена получим прибыль нарастающим итогом на текущий момент времени. Доля βп капитализируемой прибыли с выхода интегратора и амортизация дают на текущий момент времени прирост собственного оборотного капитала предприятия. Блок-схема с операторными
звеньями адекватно отражает взаимосвязи и существенно упрощает вычисление динамики саморазвития
предприятия в зависимости от исходных данных и передаточных характеристик звеньев, по существу являющихся качественными характеристиками предприятия.
Время оборота капитала, время службы основных
фондов, цена привлечения, маржинальная рентабельность – все они выступают в блок-схеме передаточными характеристиками операторов, одновременно являясь качественными показателями предприятия, измеряемыми в процессе его жизнедеятельности.
Уравнения динамики изменения капитала и
прибыли для многопараметрической модели
предприятия
Вывод аналитических уравнений для модели, представленной на рис. 22, не очень сложен, но требует
определенных навыков и внимания при выводе весьма
громоздких промежуточных уравнений. Поэтому мы проиллюстрируем методику расчета динамики развития
предприятия в многопараметрической модели рис. 22 на
примере расчета уравнения прибыли уп(t). Из блоксхемы нетрудно убедиться в справедливости равенства:
уп(s) = ув(s) ─ усп(s) =
=КОК(s)(1 + pм)/об ─ [КОК(s)/ об +
+ уДЗ(s)(1+ н ) + уп н ].
После сокращения одинаковых слагаемых запишем:
131
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
уп(s) = КОК(s) pм/ об ─ уДЗ(s)(1+ н ) ─ уп н .
( 71)
Теперь из блок-схемы запишем уравнение для Кок(s):
КОК(s) = Ксн(s) + К(s) + Кпр(s).
( 72)
Для К(s) справедливо равенство
К(s) = уа(s)/s + βп уп(s)/s,
где поток амортизации
уа(s) = Кф(s)/ сл.
( 73)
Подставим КОК(s) из (72) и К(s) из (73) в (71) получим
уравнение
уп(s) = (pм/об)(Ксн(s)+Кпр(s))+βпpмуп(s)/(об
s)+pмуа(s)/(об s) ─ уДЗ(s)(1+ н ) ─ уп н .
( 74)
Это уравнение содержит искомый параметр уп(s) и
исходные величины независимых векторов и передаточные функции операторных звеньев. Решив его относительно искомого потока прибыли, получим следующее равенство:
y п ( s ) = {[ Kсн К пр ( s )] spМ /[ об ( 1 н )] sy ДЗ ( s ) pМ y a /[ об ( 1 н )]} /
/{ s п pМ /[ об ( 1 н )]} .
( 75)
С учетом соотношений (69) уравнение будет иметь
следующий вид:
y п ( s ) {[ Kсн К пр ( s )] pМ /[ об ( 1 н )]
sy ДЗ ( s ) pМ y a /[ об ( 1 н )]} /
/{ s п pМ /[ об ( 1 н )]}
( 76)
Полученной функции изображения (76) будет соответствовать функция оригинал уп(t):
уп(t) =[(Ксн+Кпр)pм/(об(1+ н ) ─
─ уДЗ]ехрβпpмt/(об(1+ н ))+
+(уа/βп)[ехрβпpмt/(об(1+ н )) ─ 1].
( 77)
Как следует из (77), прибыль растет по экспоненте.
Второе слагаемое роста прибыли связано с амортизацией. Из (77) определим начальную величину потока
прибыли уп(0) при t = 0 :
уп(0) = (Ксн+Кпр)pм/[об(1+ н )] ─ уДЗ .
( 78)
Таким образом, уравнение с учетом (78) можно записать иначе
уп(t) = уп(0) ехр{βпpмt/[об (1+γн)]}+
+(уа/βп)
ехр{βпpмt/[(об(1+γн)) ]}─ 1
.
( 79)
Заменим переменную t в (79) на ∆t = t – tн, тогда получим
уп(∆t) = уп(tн) ехр{βпpм∆t/[об(1+γн)]}+
+(уа/βп)
ехр{βпpм∆t/[об(1+γн)) ]} ─ 1
.
( 80)
Отсюда следует простое утверждение – если на момент tн поток прибыли составляет величину, равную
уп(tн), то в дальнейшем при сохранении достигнутых качественных характеристик предприятие будет наращивать прибыль по экпоненциальному закону в соответствии с (80).
Для вывода функции изображения К(s) воспользуемся (73). Опуская промежуточные преобразования, запишем конечный результат:
( Kсн К пр ) п pМ /
K ( s )
132
/[ об ( 1 н )] п y ДЗ y a
s п pМ /[ об ( 1 н )]
..
( 81)
2’2005
Используя таблицу соответствия (см. Приложение 1)
найдем функцию оригинала:
К(t) = [Ксн+Кпр ─ (уДЗ ─ уа/βп)]*
* [ехр{βпpмt/[об(1+ н )]} ─ 1
.
( 82)
Уравнение (82) можно с незначительной погрешностью записать в более простом виде. Для этого экспоненту представим в виде двух первых членов ряда Маклорена. В результате получим после несложных преобразований
К(t) ≈ {(Ксн+Кпр)βпpм/[об(1+ н )] - βпуДЗ ─ уа }t.
( 83)
Из совместного рассмотрения (78) и (83) и замены переменной t на ∆t = (t – tн) получим:
К(∆t) ≈ (βпуп(tн) + уа)∆t.
( 84)
Очевидно, если на момент tн поток прибыли составляет величину уп(tн), то в дальнейшем, при сохранении
предприятием достигнутых качественных характеристик, прирост капитала будет расти в первом приближении пропорционально длительности периода работы
согласно (84).
Функцию изображения оборотного капитала КОК(s)
найдем после подстановки в (72) К(s) из (81). Не вдаваясь в описание расчетов, запишем конечный результат:
Kсн К пр
KОК ( s )
s п pМ /[ об ( 1 н )]
п y ДЗ y a
s { s п pМ /[ об ( 1 н )]}
..
Соответствующая временная функция
имеет вид:
Кок(t)=(Ксн+Кпр)ехр{βпpмt/[об(1+ н ]} –
( 85)
оригинала
[об(1+ н )(βпуДЗ - уа)/(βпpм)]*
*ехр{βпpмt/[об(1+ н )]}.
( 86)
Заменим второе слагаемое приближенным выражением, полученным после разложения экспоненты в ряд
Маклорена, тогда получим
КОК(t) ≈ (Ксн+Кпр)ехр{βпpмt/[об(1+ н )]} ─
─ (βпуДЗ ─ уа)t.
( 87)
Дальнейший цикл упрощения формулы динамики роста капитала приведет к уравнению (84), после чего можем записать
КОК(∆t) ≈ Ксн+Кпр +[βпуп(tн) + уа]∆t.
( 88)
Эта формула проста и доходчива с точки зрения
здравого смысла, и, на наш взгляд. она и применяется в
повседневной практике. В конечном счете, это только
подтверждает адекватность модели реальной действительности.
План-матрица развития предприятия на
основе многопараметрической модели
.Полученные аналитические уравнения позволяют реализовать в электронной таблице Excel многопараметрическую план-матрицу развития предприятия c динамикой как абсолютных, так и качественных показателей
финансового состояния. Пример план-матрицы финансового состояния с расчетом полугодового плана прогноза ежемесячных показателей на основе рассмотрен-
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
ной многопараметрической модели представлен в виде
табл. 3.
Расчет прогнозных данных выполнен на базе фактических данных за прошедшие три месяца. Программа
вычисления использует в качестве начальных исходных
данных средние показатели за предыдущие три месяца.
После расчета показателей финансового состояния
для первого месяца планового периода они (показатели) используются в качестве исходных данных для расчета показателей следующего месяца. Таким образом,
фактические данные за прошедший период непосредственно влияют на формирование исходных данных
для первых трех месяцев планового периода и опосредованно – для следующих месяцев.
На базе фактических данных за прошедшие три месяца вычисляется базовая траектория развития предприятия, предполагающая сохранение тенденции развития,
заложенные ранее через систему абсолютных и качественных характеристик.
Чтобы дать возможность внести необходимые менеджменту изменения в траекторию развития, предусмотрена возможность внесения планируемых корректировок качественных показателей предприятия (маржинальной
рентабельности,
времени
оборота
капитала), и корректировки объемов привлечения дополнительного капитала с учетом его цены в %/год.
Эти изменения могут основываться либо на оценках
состояния рынка, либо на планируемых изменениях
внутри предприятия (организационные, технологические
перестройки, ускорение реализации продукции и т.д.).
Менеджмент может просчитать ряд возможных вариантов развития финансового состояния, внося соответ-
ствующие корректировки плана, как на начальном этапе, так и в процессе его реализации.
5.4. Модель предприятия с независимым
вектором потока выручки
Блок-схема модели
Все предыдущие модели предполагали зависимость
выручки (вектор ув ) от величины инвестированного капитала ∆К в оборотные средства КОК.
На рис. 23:
Кпн [руб.] – начальный объем собственного оборотного капитала;
Кпр [руб.] –объем заемных средств (привлеченных ресурсов);
Ккп [руб.] –начальный объем капитала предприятия;
КОК [руб.] – объем оборотного капитала;
Ксч – текущий объем капитала предприятия за вычетом оборотных средств;
Кф [руб.] –объем основных фондов;
Епр [%/год] – цена заемных средств в % годовых;
упс [руб./год] – поток перенесенной стоимости в составе реализованной продукции, (услуг) предприятия;
рм – маржинальная рентабельность предприятия;
упр [руб./год] – поток платежей за привлеченные ресурсы (заемные средства);
уТ – поток текущих добавленных затрат (включая оплату труда работников) в составе добавленной стоимости;
уа [руб./год] – поток амортизационных начислений, учитываемый в себестоимости продукции предприятия;
н – налог на добавленную стоимость;
ун [руб./год] – поток платежей по налогу с добавленной стоимости;
уДЗ = упр+уа+уТ [руб./год] – суммарный поток добавленных затрат;
Таблица 3
133
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
Кф
2’2005
ya
1 / сл
Х
1/s
Yа
+
п
Х
+
Yпн
К
+
Ксн
Y
yп
yПС
об
x
КKП
1/s
Yп
X
yВ
1/(1+pм)
КОК
yН
н
yТ
рм
Ксч
X
+
yДС
+
yДН
Кпр
+
yДЗ=yТ+yа+yпр
yпр
Х
Епр
Рис. 23. Многопараметрическая модель предприятия с независимым вектором потока выручки
Yа [руб.] – стоимость амортизации нарастающим итогом;
уп [руб./год] – поток прибыли;
Yп [руб.] – прибыль банка нарастающим итогом до налогообложения;
п – процент налогообложения прибыли;
Yпн [руб.] – прибыль, накопленная нарастающим итогом после вычета налога на прибыль;
К [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования, преобразующий вектора денежных потоков в вектора накопленного капитала (денежных
потоков в вектора накопленного капитала (денежных средств с
нарастающим итогом).
Такое допущение возможно, если рынок и конкуренция не ограничивают объемы реализованной выручки.
В этом случае объем выручки ограничен только внутренними факторами. При этом, с целью обеспечения
роста прибыли, задачей корпоративного управления
предприятием является непрерывное инвестирование
определенной части прибыли βп в расширение производства продукции. Таким образом, целью корпоративной политики является рост прибыли за счет расширения воспроизводства.
Однако рынок диктует свои правила. Для многих
предприятий выручка зависит в основном от потребителя. Например, продажа автомобилей зачастую не зависит от возможностей предприятия увеличивать их выпуск.
Выручка от продаж в большом числе случаев определяется внешними факторами. Для таких случаев для
достижения адекватности модели предприятия вектор
потока выручки должен быть представлен в виде независимого вектора. Соответственно, вектор оборотного
капитала КОК и дополнительные инвестиции будут зависеть от объема выручки. Блок-схема модели для такой модели представлена на рис. 24. В ней в качестве
основного показателя качества корпоративного управления используется величина свободных средств на
расчетном счете предприятия Ксч.
Динамика развития предприятия с
независимым потоком выручки
Изображения для основных трех показателей: потока
прибыли уп, прироста капитала ∆К и величины свободных средств на расчетном счете предприятия будут
134
определяться следующими уравнениями (обозначения
указаны на рис. 23):
уп(s) = ув(s)рм (1 – н )/(1+рм) – уДЗ(s);
( 89)
∆К(s) = уп(s)/s + уа(s)/s =
= [(ув(s)рм(1 – н )/(1+рм) –
- уТ(s) – упр(s))(1 – п ) + п уа(s)]/s;
( 90)
Ксч(s) = Ксн(s) + Кпр(s) +
+ [(ув(s)рм(1 – н )/(1+рм) –
– уТ(s) – упр(s))(1 – п ) + п уа(s)]/s –
– ув(s) об /(1+рм).
( 91)
Функции оригинала для этих векторов запишем для
случая, когда независимые вектора равны константам,
то есть
ув(t) = ув;
уТ(t) = уТ;
уа(t) = уа;
упр(t) = упр;
Ксн(t) = Ксн;
Кпр(t) = Кпр.
Следовательно, в соответствии с таблицей операциионных соответствий из приложения 1, в уравнения
(89), (90), (91) необходимо подставить
ув(s) = ув/s;
уТ(s) = уТ/s;
уа(s) = уа/s;
упр(s) = упр/s ;
Ксн(s) = Ксн/s;
Кпр(s) = Кпр/s.
После подстановки получим:
уп(t) = уврм (1 – н )/(1+рм) – уДЗ;
( 92)
∆К(t) = уп(t) + уа(t) = [(уврм (1 – н )/(1+рм) – уТ –
упр)(1 – п ) + п уа] t;
( 93)
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
Ксч(t) = Ксн + Кпр + [(уврм (1 – н )/(1+рм) – уТ – упр)(1 –
п ) + п уа] t – ув об /(1+рм).
( 94)
В уравнениях (92), (93), (94)
упр = КпрЕпр, уа = Кф/ сл .
Полученные уравнения принципиально отличаются от
уравнений для моделей с расширенным воспроизводством капитала. Это естественно, так как в модели объем выручки и добавленные затраты являются независимыми (экзогенными) величинами. Прибыль, также не
изменяет свою величину со временем. Переменной величиной являются прирост капитала и средства Ксч на
расчетном счете предприятия, не инвестируемые в
оборотные средства Кок. Но, как следует из (94), динамика их роста не растет по экспоненте, а растет пропорционально временному периоду. Заменив переменную времени t на ∆t = t – tн и приняв уп(t) = уп(tн) уравнения (93) (94) можно записать в простом виде:
∆К(∆t) = (уп(tн) + уа) ∆t;
( 95)
Ксч(t) = Ксн + Кпр + (уп(tн) + уа) ∆t.
( 96)
План-матрица развития предприятия с
независимым потоком выручки
План-матрица развития представлена в табл. 4. Она
иллюстрирует возможности использования модели
предприятия для расчета бизнес-плана финансового
состояния за каждый месяц планового периода вновь
создаваемого предприятия.
В табл. 4 приведен пример расчета траектории развития вновь создаваемого фотоцентра, предоставляющего услуги населению и юридическим лицам по фотографированию, проявке, изготовлению фотоснимков, в
том числе на электронных носителях. Выручка фотоцентра будет зависеть от правильной оценки рынка фо-
тоуслуг. В качестве исходных данных в данном примере
приняты:
привлеченные средства в основные фонды и оборотный
капитал;
цена привлеченных средств;
траектория роста выручки (с 700 000 руб. в 1-ый месяц до
2 000 000 руб. на 7-ой месяц);
динамика уменьшения времени оборота оборотного капитала (с 28 дней до 10 дней);
маржинальная доходность, равная 270%;
зарплата сотрудников с учетом премии в сумме 10% от чистой прибыли;
прочие текущие расходы в составе добавленной стоимости.
Целью данной план-матрицы развития является расчет динамики роста накоплений (свободного капитала),
позволяющей оценить возможности возврата привлеченных ресурсов. Как следует из таблицы, уже на седьмой месяц накопленные собственные средства (свободный капитал нарастающим итогом) позволят вернуть около 40% заемных средств. В приведенной планматрице сделан упрощенный расчет, не учитывающий
возможность
непрерывного
погашения
заемных
средств, что привело бы к снижению затрат на выплату
ежемесячных процентов. Изменение прибыли от месяца к месяцу вызваны изменением маржинальной рентабельности и экзогенных переменных (выручки и добавленных затрат). Их величина задается на основе
возможности роста потребительского спроса. Кроме того, в плане предусмотрен рост добавленных затрат за
счет роста фонда оплаты труда пропорционально росту
накоплений, что не предусматривалось в рассмотренной выше модели.
Таблица 4
135
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
6. МНОГООБРАЗИЕ ДИНАМИЧЕСКИХ
МОДЕЛЕЙ В ЭКОНОМИКЕ
Представленные выше многопараметрические модели обеспечивают решение задачи прогнозирования
и планирования разнообразных предприятий, отличающихся по отраслевому признаку, по объемам производства, по производственной структуре и многим другим признакам. Тем не менее, разнообразие экономик
предприятия, стилей менеджмента может потребовать
проектирования новых адекватных динамических моделей. Структура блок-схемы зависит также от системы сбора и хранения данных.
Операторный метод имеет широкие возможности
проектировать разнообразные блок-схемы моделей
экономических систем. Они могут отличаться особенностями формирования ресурсов, структурированием товарных и финансовых потоков, учитывать внутреннюю
кооперацию и т. д.
В каждом случае потребуется:
проектирование адекватной поставленным задачам блоксхемы модели,
аналитическое вычисление функции изображений,
определение уравнений для показателей финансового состояния системы в функции от времени и, наконец,
разработка программы расчета план-матрицы развития
предприятия, решающей задачи расчета прогноза и составления вариантов плана.
Проиллюстрируем на трех примерах возможности дополнения рассмотренных выше моделей, отложив вывод аналитических уравнений для следующих публикаций или до появления заказчика. Первый пример схемы
модели показан на рис. 24.
На рис. 24:
Кпн – начальный капитал предприятия;
Кп(s) – текущий капитал предприятия;
п – среднее время производственного цикла предприятия;
усп [руб./год] – поток себестоимости изготовленной продукции
предприятия;
р – рентабельность (прибыль/себестоимость изготовленной
продукции);
упц – прибыль в цене изготовленной продукции;
уц = усп (1 + р) [руб./год] – поток стоимости (цены) изготовленной продукции предприятия;
Yв – стоимость изготовленной продукции нарастающим итогом;
Yзс – запасы нереализованной продукции;
р – среднее время реализации продукции предприятия;
ур – поток реализации;
Yр – стоимость реализации нарастающим итогом,
К
Yп
П
2’2005
уп [руб./год] – поток прибыли;
Yп = уп /s [руб.] – прибыль предприятия нарастающим итогом;
п – доля прибыли, направляемая на накопление капитала
предприятия;
К = пYп [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования в пространстве изображений
Лапласа.
Модель решает задачу оценки влияния на траекторию
развития, наряду с временем производственного цикла,
времени реализации продукции. Она позволяет также
рассчитать запасы нереализованной продукции, определить зависимость динамики текущего объема капитала от времени реализации и времени производственного цикла изготовления.
Во втором примере модель решает задачу оценки
влияния капвложений на динамику развития предприятия. Блок-схема модели представлена на рис. 25.
На рис. 25:
Кпн [руб] – начальный объем собственного денежного капитала;
Кст [руб] –текущий объем собственного капитала;
Клр [руб] –объем заемных средств (привлеченных ресурсов);
КОК [руб] – суммарный объем оборотного капитала;
Кфн [руб] –объем основных фондов;
ук – поток капвложений;
Yк – поток капвложений нарастающим итогом;
Епр [%/год] – цена заемных средств в % годовых;
упс [руб/год] – поток перенесенной стоимости в составе реализованной продукции, (услуг) предприятия;
рм – маржинальная рентабельность предприятия;
упр [руб/год] – поток платежей за привлеченные ресурсы (заемные средства);
уТ – поток текущих добавленных затрат (включая оплату труда работников) в составе добавленной стоимости;
уа [руб/год] – поток амортизационных начислений, учитываемый в себестоимости продукции предприятия, н – доля налога
на добавленную стоимость);
ун [руб/год] – поток платежей по налогу с добавленной стоимости;
уДЗ = упр + уа + уТ [руб/год] – суммарный поток добавленных
затрат;
Yа [руб] – стоимость амортизации нарастающим итогом;
уп [руб/год] – поток прибыли;
Yп [руб] – прибыль банка нарастающим итогом до налогообложения;
п – доля прибыли, направляемая на накопление собственного капитала;
К [руб] – прирост капитала предприятия,
1/s – оператор интегрирования, преобразующий вектора денежных потоков в вектора накопленного капитала (денежных
средств с нарастающим итогом).
yп
1/s
Yp
р
1/s
yпц
Кпн
КПТ
+
1 / п
1/s
+
x
yсп
yЦ
1 / п
++
YВ
Yзс
Рис. 24. Обобщенная динамическая модель предприятия,
учитывающая время реализации продукции
136
Х
+
yр
Царьков В.А.
Кфн
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
Кф
+
ya
1 / сл
Х
yк
1/s
Х
1/s
Ya
Yпн
п
+
Yп
yП
1/s
К
рм
Х
н
н
+
yДC
yн
Ксн
КСТ
+
Ко
+
yпc
1 / об
x
yВ
+
yТ
yсп
+
+
Х
+
yДЗ=yT+ya+yпр
yпр
Кпр
Х
Епр
Рис. 25. Многопараметрическая модель предприятия с капвл н ожениями в основные фонды
В представленной модели капитальные вложения
учитываются в виде независимого вектора потока капитальных затрат ук. На выходе интегрирующего звена
вектор капитальных затрат нарастающим итогом Yк
суммируется с начальной величиной основных фондов
предприятия и одновременно уменьшает величину оборотного капитала предприятия.
Объем основных фондов предприятия в рассматриваемой модели равен сумме
Кф = Кфн + Yк.
Объем оборотных средств равен
Кок = Ксн + К + Кпр ─ Yк.
В остальном, блок схема на рис. 25 повторяет рассмотренную выше схему на рис. 22. Это не относится к
динамике развития. Расходы на капвложения оказывают свое, иногда существенное влияние на динамику
траектории развития предприятия.
Третий пример касается особенностей учета налога
на добавленную стоимость. Бухгалтерский баланс содержит счета НДС уплаченного и полученного. Разница
между этими счетами перечисляется в налоговые органы. Эта практика может быть отражена в модели предприятия. Блок-схема модели, адекватной бухгалтерскому учету. представлена на рис. 26.
На рис. 26:
Кпн [руб.] – начальный объем собственного денежного капитала;
КСТ [руб.] –текущий объем собственного капитала;
Клр [руб.] –объем заемных средств (привлеченных ресурсов);
КОК [руб.] – суммарный объем оборотного капитала;
Кф [руб.] –объем основных фондов;
Епр [%/год] – цена заемных средств в % годовых;
упс [руб./год] – поток перенесенной стоимости в составе реализованной продукции, (услуг)предприятия;
рм – маржинальная рентабельность предприятия;
упр [руб./год] – поток платежей за привлеченные ресурсы (заемные средства);
уТ – поток текущих добавленных затрат (включая оплату труда работников) в составе добавленной стоимости;
уа [руб./год] – поток амортизационных начислений, учитываемый в себестоимости продукции предприятия;
н – доля налога на добавленную стоимость);
ун [руб./год] – поток платежей по налогу с добавленной стоимости;
уДЗ = упр + уа + уТ [руб./год] – суммарный поток добавленных
затрат;
Yа [руб.] – стоимость амортизации нарастающим итогом;
уп [руб./год] – поток прибыли;
Yп [руб.] – прибыль банка нарастающим итогом до налогообложения;
п – доля прибыли, направляемая на накопление собственного капитала;
Yп [руб.] – прибыль, накопленная нарастающим итогом;
К [руб.] – прирост капитала предприятия;
1/s – оператор интегрирования, преобразующий вектора денежных потоков в вектора накопленного капитала (денежных
средств с нарастающим итогом).
Как видим, в блок-схеме поток НДС, пропорциональный перенесенной стоимости упс , вычитается из потока
НДС полученного. Величина НДС полученного пропорциональна выручке предприятия ув. Поток расходов
предприятия по НДС ун в этой модели учитывается как
разность
ун = унп - уну.
В этом отличие модели предприятия на рис. 26 от
рассмотренной ранее многопараметрической модели
на рис. 22. Это отличие не должно сказаться на траектории развития финансового состояния предприятия,
так как оно касается только методов учета и расчета
данных.
137
СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «АУДИТ И ФИНАНСОВЫЙ АНАЛИЗ»
Кфн
Кф
2’2005
ya
1 / сл
Х
Ya
1/s
Yпн
+
yП
Yп
1/s
п
yну
yнп
К
x
рм
+
yДC
Ксн
КСТ
+
Ко
+
1/ об
yсп
+
x
yпc
Х
yВ
+
yТ
+
+
yДЗ=yT+
+ya+yпр
Кпр
Х
Епр
Рис. 26. Многопараметрическая модель предприятия с учетом НДС полученного и уплаченного
Динамические модели в экономике постепенно становятся инструментом практических расчетов в повседневной деятельности по управлению предприятием.
В литературе имеется ряд публикаций по динамическим моделям экономики банков [7-16]. В них приведены блок-схемы моделей и расчеты план-прогноза финансового состояния банка. Траектория развития банка
вычисляется в виде план-матрицы развития, содержащей ежемесячные показатели финансового состояния
за каждый месяц планового периода. В перечень показателей входят: собственный капитал, привлеченные
средства, процентные и непроцентные доходы, операционные и хозяйственные расходы, прибыль, показатели эффективности использования активов.
Разработано программное обеспечение расчета плановых и прогнозных показателей финансового состояния банка за каждый месяц планового периода. На рынке программных продуктов оно представлено под
названием «Программа стратегического планирования
«План-матрица развития банка» (ПСП «План-матрица»)
рег. №2002612015. Программа реализована на языке
Visual Basic for Application (VBA), интерфейс реализован
в среде MS-Excel. Базы данных хранятся в формате
MS-Access. Описание этой программы приведено на
сайте банковской аналитической группы «Амелин и
партнеры» (http;/H16.H1.RU).
ЗАКЛЮЧЕНИЕ
Стремительное развитие информационных технологий в системах корпоративного управления вызывает
потребность в разработке адекватных моделей, соответствующих задачам системного анализа и принятия
управляющих решений. Операторные методы моделирования в экономике до последнего времени являлись
объектом в основном научных изысканий.
Настоящая работа не открывает новые истины в экономической науке. Она, по нашему мнению, носит прагматический характер и призвана дать методику проек138
тирования, а также показать широкие возможности прикладного применения операторного метода моделирования.
Вместе с тем, динамические модели, оперирующие с
ресурсами и их потоками, вносят новый взгляд на функционирование экономики. Кругооборот капитала выступает как физическое воплощение обратной, положительной связи, которая не просто проявляет свое присутствие в некоторых экономических системах, а
является имманентным фактором экономики в целом. В
связи с этим, в дальнейшем, очевидно, получат развитие математические модели с нелинейной обратной
связью, на основе теории фракталов.
Все показатели, используемые в динамических моделях, вычисляются как средние значения за период.
Именно с усреднением оказывается возможным понять
структуру экономических систем, в результате которой
сквозь хаос, случайность и непредсказуемость поведения экономических систем проступает детерминированность и закономерность их развития. Другими словами,
можно сказать, что использование средних за период
показателей не является неким, нестандартным приемом приобщения экономики к детерминированным объектам. По существу это широко применяемый инструмент познания явлений не только в экономической статистике, но и во всех других областях науки и техники.
Достаточно вспомнить, что физические системы, оперирующие, на первый взгляд, с детерминированными
временными измерениями, на самом деле, также основываются на измерениях средних за период. Например,
такие единицы измерения, как ампер, сопротивление,
сила тока и т.д.- все они основаны на измерении в целом хаотического движения электронов. Однако, физики, измерив в среднем за период в одну секунду поток
хаотически движущихся электронов, пришли к детерминированным оценкам электрических параметров.
В экономике роль усредняющей секунды играет год.
Поэтому, измеряя средние потоки ресурсов (доходов и
Царьков В.А.
ДИНАМИЧЕСКИЕ МОДЕЛИ ЭКОНОМИЧЕСКИХ СИСТЕМ
расходов) за неделю или месяц, мы вынуждены использовать единицы измерения руб./год, подобно кулон/сек. Мы особо обращаем внимание читателя на
этот феномен, так как экономические измерения стоимостных, финансовых, товарных потоков происходят
как внутри временной единицы (года), так и вне ее. Измеряя средние значения потоков ресурсов внутри года,
например, за месяц, в уравнения, необходимо подставить данные, приведенные (пересчитанные) к году.
Вторая особенность операторных, потоковых моделей
обусловлена с формализацией связи ресурсов (капитала) как с потоком доходов, так и расходов. Отсюда и
возникают предложения наряду с привычным термином
«доходность» применять термин «расходность», «коэффициент» или «норма расходности». Какой из этих
терминов приживется, покажет жизнь.
Литература
1. Ланге О. Введение в экономическую кибернетику, перевод
с польского под ред. д.э.н. Майминаса Е. З. – М.: Прогресс,
1968 г. – 207 с.
2. Багриновский К. А. Модели и методы экономической кибернетики. – М,: Экономика», 1973. – 206 с.
3. Корн Г. , Корн Т. Справочник по математике для научных
работников и инженеров, перевод с английского . – М.:
Наука, 1968 г. – 720 с.
4. Царьков В.А. О проблеме единого критерия оценки экономической эффективности научно-технической и производственной деятельности, АН СССР, Институт экономики,
Научный Совет по экономическим проблемам научнотехнической революции препринт доклада. – Москва, 1982
г. – 25.
5. Царьков В.А. Использование методов теории автоматического управления при построении и анализе динамических
моделей экономики производства. – Измерения Контроль
Автоматизация, ISSN – 2295, №4, 1984 г. – с. 66-78.
6. Царьков В.А. Экономическая динамика и эффективность
капитальных вложений. – М,: ЛЕКСИКОН ISBN5-89463-0010, 1997 г. — 104 с.
7. Царьков В.А. Агрегированная динамическая модель банка.
– Банки и технологии, РЕГ. №012846, №3, 1998 г. – с. 6671.
8. Царьков В.А. Моделирование экономической динамики
банка. – Банковское дело, РЕГ. №012296, , №6, 2000 г. –
с. 25-30.
9. Царьков В.А. План-прогноз на основе модели экономической динамики банка. – Банковское дело, РЕГ. №012296, ,
№12, 2000 г. – с. 25-28.
10. Амелин И.Э., Царьков В.А. План-матрица развития банка.
– Банки и технологии, РЕГ. №012846, №1, 2002 г. – с. 4249.
11. Амелин И.Э., Царьков В.А. Динамическая модель развития
банка. Практические вопросы применения. – Научнопрактическая конференция «Информационные системы
для бизнеса ХХ1 века», 12-15 марта 2002 г.
12. Амелин И.Э., Царьков В.А. Новый подход к планированию
развития банка. – Аналитический Банковский Журнал,
РЕГ. №013808, №5 (84), 2002 г. – с. 88-93.
13. Амелин И.Э., Царьков В.А. Методика и технология расчета
финансового плана на основе динамической модели банка.
– Материалы семинара «Развитие современных аналити-
14.
15.
16.
17.
ческих и управленческих технологий в условиях перехода
коммерческих банков на МСФО», 14 ноября 2002 г., М,
МАКС Пресс, ISBN 5-317-00664-3, 2002. – с. 157-163,.
Амелин И.Э., Царьков В.А. План-матрица развития банка. .
– Банки и технологии, РЕГ. №012846, №1, 2002 г. – с. 4249.
Амелин И.Э., Царьков В.А. Прогноз рисков прибыли с использованием динамической модели банка. . – Труды
«Международного ноябрьского семинара Клуба банковских
аналитиков», М., 2003 г.
Царьков В.А. Моделирование экономической динамики
предприятия. – Аудит и финансовый анализ, рег. №7711602 Минпечати, №4, 2004 г. – с.186-190.
Царьков В.А. Внутренняя норма эффективности инвестиций. – СБОРНИК НАУЧНЫХ ТРУДОВ Приложение к журналу «Аудит и финансовый анализ», рег. ПИ №77-17242
Минпечати, №4, 2004 г. – с. 92-97.
Приложение 1
ТАБЛИЦА ОПЕРАЦИОННЫХ СООТВЕТСТВИЙ
Оригинал
f(t)
Изображение F(s)
0 , t 0;
1( t )
1 , t 0.
1/s
T1(t)*
1/s
tn-1/(n – 1)!
1/sn
e-αt
1/( +s)
(1 - e-αt)/α
1/s(s + α)
(e-αt + αt – 1)/ α2
1/ s2(s + α)
(1 – (1 + αt) e-αt)/α2
1/s(s + α)2
((b – α) e-αt –
– (b - ) e-t)/( - α)
(s + b)/(s + α)( s + )
1/ α +
+( e-αt - α e-t)/ α( α - )
1/s(s + α)(s + )
Примечание * - в дальнейшем множитель 1(t) опускается
Контактный телефон:
+7 (095) 249-84-14
Царьков Вячеслав Алексеевич
139