УДК 004.94; 004.925.8 Морозов Алексей Александрович студент группыАСП-Б-07 Научный руководитель: Прохорова Людмила Владимировна
реклама

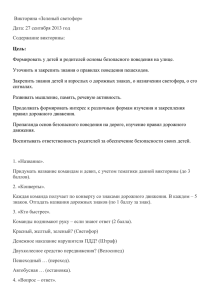
УДК 004.94; 004.925.8 Морозов Алексей Александрович студент группыАСП-Б-07 Научный руководитель: Прохорова Людмила Владимировна доц. кафедры САПР Московский государственный горный университет МЕТОДЫ РАСЧЕТА ЗАДЕРЖЕК ПЕШЕХОДОВ НА РЕГУЛИРУЕМОМ ПЕШЕХОДНОМ ПЕРЕХОДЕ METHODS OF CALCULATING DELAYS IN PEDESTRIAN CONTROLLED PEDESTRIAN CROSSING В условиях растущей автомобилизации в нашей стране, повышение эффективности функционирования работы автомобильного транспорта в городах и их развитие неразрывно связаны с увеличением пропускной способности улично-дорожной сети, а как следствие возрастающая возможность дорожно-транспортных происшествий с участием пешеходов. Которые, согласно данным ГИБДД, составляют в городах РФ около 70% от общего их количества, поэтому безопасность движения пешеходов является одним из острых проблем организации дорожного движения в городах. В крупных городах России наезды на пешеходов составляют 60% ДТП со смертельным исходом. Вместе с тем в действующих нормативных документах и руководствах вопросам ОД пешеходов уделено недостаточно внимания [3-5] и указано лишь несколько самых общих положений. Во многом это объясняется тем, что при планировании мероприятий по совершенствованию функционирования городской улично-дорожной сети вопросам, связанных с пешеходными переходами не уделяется достаточного внимания следующим аспектам: не учитываются все формы общественного эффекта при расчете эффективности сооружения того или иного вида пешеходного перехода; пропускная способность и местоположение пешеходных переходов не рассчитываются в зависимости от конкретных условий движения транспорта и пешеходов, а назначаются без каких-либо обоснований. Пешеходный переход — специальная область на проезжей части, предназначенная для перехода пешеходов на другую сторону улицы. Пешеходные переходы на уровне проезжей части обычно устраивают на перекрёстках улиц и дороги в местах интенсивных пешеходных потоков. Виды переходов: Наземные а) Нерегулируемые пешеходный переход обозначается соответствующими дорожными знаками и (или) специальной разметкой в виде параллельно идущих вдоль проезжей части широких белых линий. 48 Такой вид наземного перехода является самым распространенным, а так же местом повышенной опасности - на ней всегда есть вероятность столкновения незащищенного человека с автомобилем (до 70% ДТП происходит именно на наземных переходах [2], что влечет за собой заторы транспортных сетей, а иногда – случаи гибели пешеходов). Для улучшения ситуации наземные переходы нужно делать более заметными, путем установки дорожных знаков "пешеходный переход" на флуоресцентном фоне, нанесения дорожной разметки с применением цветных дорожных покрытий, обустройства дополнительного освещения над пешеходными переходами, а также установка там где это возможно пешеходных ограждений. Для снижения скорости движения транспортных средств, при приближении к нерегулируемому пешеходному переходу проводится ряд мероприятий: применение искусственных неровностей (например, лежачего полицейского); создание шумовой разметки; установка дорожных знаков обратной связи; организация освещаемых участков дорог и др.. б) Регулируемые - на пешеходных переходах допускается наличие светофора или регулировщика. На регулируемых пешеходных переходах совместно с разметкой 1.14 применяется разметка 1.12 "Стоплиния". Светофоры размещаются с обеих сторон проезжей части на расстоянии 1 м от границы пешеходного перехода. Для обеспечения безопасности пешеходов на пешеходных переходах иногда применяют вызывное пешеходное устройство, с помощью которого пешеходы могут "вызвать" по запросу разрешающий для них зеленый сигнал. После нажатия соответствующей кнопки на табло появляется надпись "Ждите", а через определенное время включается зеленый сигнал для пешеходов и, соответственно, красный для транспортных средств. Регулируемыми считаются также пешеходный переход, на котором пешеходный светофор отсутствует, а пешеходы при пересечении проезжей части руководствуются сигналами транспортных светофоров, и переход, где порядок движения определяется сигналами регулировщика. Эти переходы являются менее опасными для пешеходов, но здесь необходимо помнить о плотности потока автотранспорта и задержек пешеходов, в зависимости от режимов тактов работы светофора. Пешеходный переход может находиться не только в одном уровне с дорогой, но и в разных. В этом случае различают подземные и надземные пешеходные переходы. Эти переходы гарантированно обеспечивают безопасность движения и являются более предпочтительными, чем наземные в одном уровне. Такие переходы обозначают соответствующими знаками "Подземный пешеходный переход" и знаками "Надземный пешеходный переход". 49 Их строительство - дорогое, а потому подземные и надземные пешеходные переходы строят только в местах с большим пассажиропотоком. Подземные Подземный пешеходный переход - тоннель для безопасного перехода большого потока пешеходов под проезжей частью с высокой плотностью движения транспорта или железнодорожными путями. Надземный Надземный пешеходный переход – аналогичное определение что и у подземного, только переход через проезжую часть осуществляется над транспортной магистралью и железнодорожными путями. Возможность строительства подземных или надземных пешеходных переходов зависит от различных факторов: величины пассажирского и транспортного потоков; стоимости строительства; геологических условий; коммуникаций, расположенных вдоль участка дороги и т.д. Существуют дороги 3-х категорий, для каждой из них в соответствии с нормами СНиП 2.05.02-85 (Автомобильные дороги), имеются области применения пешеходных переходов различных типов: Рис. 1 I - нерегулируемые переходы; II - переходы со светофорным регулированием; III - пешеходные переходы в разных уровнях (надземные и подземные). Целесообразность введения светофорного регулирования, строительства пешеходных переходов в разных уровнях на дорогах II и III категорий в каждом конкретном случае определяется исходя из значений и соотношения интенсивности движения пешеходных и транспортных потоков на основе результатов технико-экономических расчетов. Выбор оптимального варианта организации движения или проекта планировки пересечения предполагает как обязательную процедуру оценку суммарного ущерба от задержек транспортных средств и пешеходов. Для 50 выполнения этой процедуры необходимы соответствующие методы расчета задержек. Отметим, что в нашей стране используется расчет задержек транспортных средств по формуле Вебстера, а расчетами задержек пешеходов пренебрегают. В этой связи представляется необходимым рассмотреть наиболее распространенные методы оценки задержек пешеходов на регулируемых пешеходных переходах (см. табл. 1). Таблица 1 Модель для определения задержки при пересечении транспортного потока на регулируемом перекрестке, основанная на непрерывном прибытии пешеходов, предложена Претти в 1979 году [3] и имеет три модификации: для однорядного пересечения; для пересечении двухрядного транспортного потока на перекрестке; при наличии полностью пешеходной фазы. Несколько позже был разработан метод Роддина (Roddin's Method 1981) [3], основанный на предположении о случайном прибытии пешеходов и ТС при постоянной длительности цикла, полном подчинении светофорной сигнализации. Браун и Роддин модифицировали уравнение, которое получила широкое распространение. Однако данное уравнение не учитывает долю пешеходов, которые пересекают проезжую часть на запрещающий сигнал. В связи с этим Браун и Родин предложили модификацию 51 уравнения,которое предполагает, что пешеходы, которые пересекают проезжую часть на запрещающий сигнал светофора, не «испытывают» задержки. Вирклер [4] обнаружил, что количество пешеходов, пересекающих проезжую часть на запрещающий мигающий сигнал светофора составляет 69%. С учетом этого обстоятельства он модифицировал модель пешеходной задержки Брауна-Роддина. Вирклер сравнил значения, полученные по этому уравнению со значениями фактически измеренной задержки на 18 переходах в Брисбане (Австралия) и нашел, что уравнение предсказало задержку приблизительно на 1% выше, чем наблюдаемые значения. В основе рассмотренных выше моделей лежит длительность цикла регулирования. При моделировании задержек с использованием вызывных устройств необходимо учитывать вероятностный характер пешеходных потоков [1]. В методе Данна и Претти (Dunn and Pretty's Method 1984), предложено выражение пешеходной задержки для регулируемого пешеходного перехода с вызывным устройством «Pelican» - рис. 2. Выражения в знаменателе представляют собой длину цикла, в случае полного подчинения светофорной сигнализации. А Б Рис. 3. Зависимость средней задержки пешеходов от интенсивности движения ТС на пешеходном переходе «Pelican». Метод Гриффита (Griffiths et al.'s Method 1984) [3] основан на исследованиях в области моделирования работы пешеходного перехода Pelican шириной до 10 м. Обнаружено увеличение пешеходной 52 задержки при увеличении интенсивности транспортного и пешеходного потоков. Увеличение длительности зеленого сигнала для ТС с 20 до 40 секунд привело к резкому возрастанию пешеходной задержки при интенсивности движения более 1000 авт/ч в обоих направлениях. На рис. 3 и 4 представлены результаты этих исследований. Транспортная лаборатория ИрГТУ тестирует модель оценки задержек пешеходов и транспортных средств на переходах с вызывными устройствами, основанную на экспоненциальном распределении интервалов в пешеходном потоке и пуассоновском характере поступления запроса пешеходной фазы [1]. Предложенная схема светофорной сигнализации отличается от «Pelican». Длительность разрешающего сигнала для пешеходов является фиксированной, длительность разрешающего сигнала. Цикл регулирования пешеходного вызывного устройства (ПВУ) предлагается разделить на три интервала t1, t2, t3 (рис. 4), при прибытии в которые, пешеходы имеют разные величины задержек. Тогда среднюю задержку пешеходов можно определять как сумму средник задержек, возникающих при прибытии пешеходов в каждом из интервалов, умноженных на соответствующие вероятности возникновения этих задержек (т.е. вероятности прибытия пешехода в интервалы t1, t 2, t3). Рис. 4. Оценка средней длительности цикла регулирования ПВУ :tpr1- переходный интервал между разрешающими сигналами; t pr2зеленый сигнал ta- зеленый сигнал для транспорта минимальной длительности; - средняя длительность зеленого сигнала для транспорта; t1, t2 - интервалы времени, в которые появление заявки не приводит к увеличению длительности цикла; t3 - интервал времени, в котором поступающая заявка увеличивает длительность цикла. Средняя величина задержки пешеходов dped оцениваться как: (1) где d1,2,3 – длительность задержки пешеходов при прибытиях в интервалы времени t1, t2, t3, с; P1,2,3 – вероятность прибытия пешехода в интервалы времени t1, t2, t3. 53 Событие 1 – пешеход прибывает в период горения разрешающего сигнала t1, задержка при этом отсутствует d1=0. Вероятность прибытия хотя бы одной заявки в интервал t1 (2) Событие 2 – пешеход прибывает в момент горения зеленого мигающего сигнала t2. Длительности мигающего сигнала недостаточно для перехода проезжей части, поступает заявка на включение зеленого сигнала для пешеходов. Получаем длительность цикла пешеходного перехода с ПВУ как при жестком режиме. Задержка складывается из минимального зеленого времени для транспорта tm и желтого сигнала tpr2, и половины суммы мигающего зеленого сигнала tm и переходного интервала tpr1 (3) Вероятность прибытия хотя бы одной заявки в интервал t2 (4) Событие 3 – пешеход прибывает в период горения зеленого для транспорта t3. Поступающая заявка на включение зеленого сигнала для пешеходов обслуживается с задержкой tм+ tпр2, при этом среднюю задержку можно оценивать как (5) Для оценки вероятности прибытия хотя бы одной заявки в интервал t3 можно рассматривать это событие, как дополняющее события P1 и P2 (6) С учетом (1-6) средняя задержка пешехода на переходе с ПВУ: (7) В настоящее время для выполнения расчетов задержки пешеходов при использовании жесткого режима регулирования, считаем возможным рекомендовать для практического использования модифицированный метод Роддина и Брауна (формулы 5-6). Выше были предложены различные способы повышения безопасности пешеходных переходов, а также снижения времени проезда транспортных средств в этих зонах. Выбор пути усовершенствования работы пешеходного перехода зависит от конкретной ситуации. Задача выбора сводится к исследованию поведения транспортных и пассажирских потоков на пешеходном переходе. Оценить эффективность принимаемых решений можно с помощью моделирования. Которое дает возможность оценивать движение транспортного потока во времени, анализировать такие данные, как пропускная способность, средняя скорость движения транспорта и т.п.. Исходя из полученных результатов, возможно варьировать различные параметры тех или иных видов перехода, например, убрать или поставить 54 светофоры, лежачих «полицейских» и т.д. для достижения нужного результата. Главной идеей здесь является то, что переход будет промоделирован еще до строительства, что позволит дать оценки различным вариантам и выбрать наилучший из них. С экономической точки зрения, очевидно, что смоделировать различные варианты постройки перехода на ЭВМ, будет намного дешевле постройки без предварительного анализа. Имитационное моделирование позволит управлять системой как единым целым, настраивать различные параметры (можно ускорять время, что позволит быстро получать данные, например, о средней скорости и загруженности потока за несколько часов или целый день, что может быть полезно при проектировании пешеходного перехода). А геометрическое моделирование в свою очередь предоставит возможность визуализации движения транспортного потока и пассажиропотоков. Будут использоваться модели пешеходов, сооружений и транспортных средств, что сделает систему более наглядной и простой для восприятия. Все это поможет сделать необходимые выводы и принять правильное решение. Литература 1. Математическое моделирование и оценка условий движения автомобилей и пешеходов. Кисляков В.М., Филиппов В.В., Школяренко И.А. – М.: Транспорт, 1979. – 200с. 2. Highway Capacity Manual 2000. – Transportation Research Board, National Research Council. – Washington, D.C., USA, 2000, – 1134 p. 3. [Электронный ресурс] – режим доступа: http://www.tfhrc.gov 4. Mark R. Virkler. Signal Coordination Benefits for Pedestrians Transportation Research Record. 5. Бадалян А.М., Ерёмин В.М. Компьютерное моделирование конфликтных ситуаций для оценки уровня безопасности движения на двухполосных автомобильных дорогах – М.: ИКФ «Каталог», 2007. – 240 с. Аннотация В статье рассмотрены методы расчета задержек пешеходов на регулируемом пешеходном переходе в условиях существующей дорожнотранспортной инфраструктуры. The article deals with methods of calculating the delay of pedestrians on a regulated pedestrian crossing in the existing road and transport infrastructure. Ключевые слова дорожная сеть, пешеходные переходы, транспортные потоки, пешеходы, проезжая часть, регулируемый переход road network, pedestrian crossings, traffic flows, pedestrian, roadway, adjustable transition 55