Занятие № 4 - metodukaz.ru
реклама

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Д.Д. Корж
ПРАКТИКА ПРОЕКТИРОВАНИЯ
Руководство к лабораторно-практическим занятиям
Методическое пособие
по курсу
«Основы инженерного проектирования»
для студентов, обучающихся по направлению
«Энергомашиностроение»
Москва
Издательство МЭИ
2001
УДК
621.8
К-665
УДК: 621.8.001.63(072)(076.5)
Утверждено учебным управлением МЭИ
Подготовлено на кафедре основ конструирования машин
Рецензенты: докт. техн. наук профессор Трухний А.Д.
канд. техн. наук доцент Хорошев А.Н.
Корж Д.Д. ПРАКТИКА ПРОЕКТИРОВАНИЯ. Руководство к лабораторнопрактическим занятиям: Методическое пособие – М.: Издательство МЭИ,
2001. – 88 с.
Представлен перечень практических заданий к лабораторнопрактическим занятиям, типовому расчету, курсовой работе и курсовому
проекту для студентов энергомашиностроительного факультета при
изучении основ инженерного проектирования на завершающем этапе
общетехнической подготовки.
Изложены методические рекомендации для преподавателей, ведущих
занятия, а также для студентов по каждому практическому заданию,
выполняемому самостоятельно и/или при консультациях преподавателя.
Для студентов других специальностей, а также для инженеров при
самостоятельном изучении таких разделов курса, как «Детали машин»,
«Методология проектирования», «Технические измерения. Основы
взаимозаменяемости и стандартизации», «Надежность деталей машин».
2
Московский энергетический институт, 2001
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ.......................................................................................................... 4
СОДЕРЖАНИЕ занятий в 4-м семестре ................................................................... 6
Занятие № 1 ВЫДАЧА ЗАДАНИЙ НА ТИПОВОЙ РАСЧЕТ ........................ 6
Занятие № 2 СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ
МЕХАНИЗМОВ .......................................................................................................... 9
Занятие № 3 НАРЕЗАНИЕ ЗУБЧАТЫХ КОЛЕС. ПОСТРОЕНИЕ
КАРТИНЫ ЗАЦЕПЛЕНИЯ ...................................................................................... 11
Занятие № 4 СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ
АНАЛИЗ ЗУБЧАТЫХ ПЕРЕДАЧ ........................................................................... 15
Занятие № 5 ПРОЕКТИРОВАНИЕ ЗУБЧАТЫХ ЦИЛИНДРИЧЕСКИХ И
КОНИЧЕСКИХ ПЕРЕДАЧ ...................................................................................... 16
Занятие № 6 ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ .......................................................... 18
Занятие № 7 СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ
АНАЛИЗ ПЛАНЕТАРНЫХ ПЕРЕДАЧ .................................................................. 22
Занятие № 8 ПРОЕКТИРОВАНИЕ ПЛАНЕТАРНЫХ ПЕРЕДАЧ ................ 24
Занятие № 9 ПРОЕКТИРОВАНИЕ ПЕРЕДАЧ ВИНТ-ГАЙКА ..................... 26
Занятие № 10 ПРОВЕРОЧНЫЙ РАСЧЕТ ВАЛОВ ......................................... 29
Занятие № 11 РАСЧЕТ ПОДШИПНИКОВ КАЧЕНИЯ .................................. 32
Занятие № 12 РАСЧЕТ ОПОР СКОЛЬЖЕНИЯ............................................... 34
Занятие № 13 ШПОНОЧНЫЕ И ШЛИЦЕВЫЕ СОЕДИНЕНИЯ .................. 35
Занятие № 14 РЕЗЬБОВЫЕ СОЕДИНЕНИЯ ................................................... 36
Занятие № 15 МУФТЫ ....................................................................................... 38
СОДЕРЖАНИЕ занятий в 5-м семестре ........................................................... 40
Занятие № 1 ВЫДАЧА ЗАДАНИЙ НА КУРСОВУЮ РАБОТУ.................... 40
Занятие № 2 БАЛАНСИРОВКА РОТОРА ....................................................... 43
Занятие № 3 ИССЛЕДОВАНИЕ КПД ЧЕРВЯЧНОЙ ПЕРЕДАЧИ ............... 47
Занятие № 4 УТОЧНЕНИЕ ТЕХНИЧЕСКОГО ЗАДАНИЯ ........................... 49
Занятие № 5 СИНТЕЗ СТРУКТУР .................................................................... 51
Занятие № 6 МЕТОДЫ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ................ 53
Занятие № 7 КОНТРОЛЬ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ............... 56
Занятие № 8 ДОПУСКИ И ПОСАДКИ. МЕТОДЫ КОНТРОЛЯ РАЗМЕРОВ
ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ........................................................................... 57
Занятие № 9 СТАТИСТИЧЕСКИЙ МЕТОД КОНТРОЛЯ
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ................................................................... 58
Занятие № 10 РАЗМЕРНЫЕ ЦЕПИ .................................................................. 63
Занятие № 11 ПРИНЦИПЫ НАЗНАЧЕНИЯ ДОПУСКОВ И ПОСАДОК ... 66
Занятие № 12 КОНСТРУИРОВАНИЕ ПОДШИПНИКОВЫХ УЗЛОВ ........ 68
Занятие № 13 КОНСТРУИРОВАНИЕ КОРПУСНЫХ ЭЛЕМЕНТОВ .......... 71
Занятие № 14 ПРОЕКТИРОВАНИЕ ВАЛОВ .................................................. 73
Занятие № 15 УПРОЩЕННАЯ ЭСКИЗНАЯ КОМПОНОВКА ..................... 74
Занятие № 16 УТОЧНЕННАЯ ЭСКИЗНАЯ КОМПОНОВКА ....................... 77
КОНТРОЛЬНЫЕ ВОПРОСЫ…………………………………………………….. 79
БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………………………………………..86
3
ПРЕДИСЛОВИЕ
Цели и задачи курса «Основы инженерного проектирования»
Задачи курса: 1) Знать элементную базу машиностроения (детали машин):
функциональное назначение, конструкцию, методы
проектировочных и проверочных расчетов;
2) Знать методы проектирования технических систем (в частности,
элементов механического привода): инвариантные понятия и этапы
проектирования (формирование технического задания (ТЗ), выбор
физического принципа действия (ФПД),
структурный синтез,
параметрический синтез), методы формирования множества решений,
методы выбора оптимальных вариантов.
Цели курсового проекта: закрепление полученных знаний и умение
применять
их на практике (практическое проектирование и
конструирование, разбор конструкций и чтение чертежей, обоснование
и защита принимаемых решений, демонстрация своих знаний по всем
дисциплинам общетехнической подготовки: математике, физике,
химии, теоретической механике, технологии материалов, механике
материалов и конструкций, инженерной графике, электротехнике).
Учебный план
4 семестр
5 семестр
6 семестр
Лекции - 34 часа
Лабораторно-практические занятия - 34 часа
Типовой расчет (1-я часть проекта)
Зачет
Экзамен
Лекции - 34 часа
Лабораторно-практические занятия - 34 часа
Курсовая работа (2-я часть проекта)
Зачет
Экзамен
Курсовой проект (3-я часть)
Зачет с оценкой (защита проекта)
Форма отчетности
4 семестр
5 семестр
4
1) Отчет по лабораторно-практическим занятиям;
2) Типовой расчет;
3) Зачет;
4) Экзамен.
1) Отчет по лабораторно-практическим занятиям;
2) I часть расчетно-пояснительной записки (РПЗ) к курсовому
проекту с рабочими миллиметровками упрощенных эскизных
проектов 2-х вариантов редукторов;
3) Зачет;
4) Экзамен.
6 семестр
1) 3-4,5 листа чертежей на ватмане формата А1 и РПЗ к
курсовому проекту (включая I часть);
2) Публичная защита курсового проекта, в результате которой
проставляется зачет с оценкой.
Пояснения к нумерации таблиц и рисунков, обозначению чертежей
Материал данных методических рекомендаций к лабораторнопрактическим занятиям по курсу «Основы инженерного проектирования»
(ОИП) предназначается для использования в 4-м, 5-м и 6-м семестрах. Для
удобства пользования нумерация занятий для каждого семестра начинается с
единицы, поэтому в содержании настоящих методических рекомендаций есть
два занятия под номером 1 (для четвертого и пятого семестров). Таблицы и
рисунки имеют двойную нумерацию (например, табл. 3.3, рис. 6.1.). Первая
цифра в номере совпадает с номером занятия, а вторая цифра обозначает
порядковый номер таблицы или рисунка, относящихся только к данному
занятию. Поэтому возможны совпадения номеров рисунков и таблиц,
относящихся к занятиям разных семестров. Таким образом, ссылки на
таблицы и рисунки в тексте методических рекомендаций следует относить
только к материалу одного занятия, если нет специального дополнительного
пояснения.
В обозначениях чертежей используется первая буква фамилии автора
атласа, из которого взят чертеж (Д – Дашкевич, С – Сахненко, Р – Решетов).
После буквы ставится номер, совпадающий с номером чертежа в атласе.
5
СОДЕРЖАНИЕ
занятий в 4-м семестре
1. Выдача заданий на типовой расчет
2. Структурный и кинематический анализ механизмов
3. Нарезание зубчатых колес, построение картины зацепления
4. Структурный, кинематический и силовой анализ зубчатых передач
5. Проектирование зубчатых цилиндрических и конических передач
6. Червячные передачи
7. Структурный, кинематический и силовой анализ планетарных передач
8. Проектирование планетарных передач
9. Проектирование передач винт-гайка
10. Проверочный расчет валов
11. Расчет подшипников качения
12. Расчет опор скольжения
13. Шпоночные и шлицевые соединения
14. Резьбовые соединения
15. Муфты
16. Зачетное занятие
Занятие № 1
ВЫДАЧА ЗАДАНИЙ НА ТИПОВОЙ РАСЧЕТ
Методическое обеспечение: бланки заданий на типовой расчет (ТР), (по
количеству
студентов), методические указания (МУ)
"Механические передачи" и к курсовому проекту (КП)
Сазонова Ю.И. (по 1 шт. на двоих).
Содержание занятия:
- выдается задание на типовой расчет каждому студенту (номера задания и
варианта исходных данных);
- студенты переписывают задания в рабочую тетрадь;
- под руководством преподавателя студенты выполняют первых три пункта
задания
Описание задания:
Типовой расчет является 1-й частью курсового проекта и заключается в
выполнении типовых проектировочных расчетов для заданной схемы
привода. Пример первого листа бланка технического задания (ТЗ) к
курсовому проекту представлен на рис. 1.1. На нем показана конкретная
схема прототипа привода и дано его краткое описание. Каждое задание
содержит варианты исходных данных, представленных в табл. 1.1. Каждому
студенту выдается персональные ТЗ и вариант исходных данных.
Формулировка пунктов задания одинакова для всех вариантов и состоит в
следующем:
6
1.
Вычертить структурную схему прототипа привода. Обозначить на
ней направления вращения и моментов для всех валов.
2.
Найти общее передаточное число механизма привода. Разбить его
по ступеням в соответствии с рекомендациями. Вычислить значения частот
вращения и моментов для всех валов.
3.
Определить передаточное число редуктора. При необходимости
разбить его по ступеням. Вычислить значения частот вращения, крутящего
момента и мощности на каждом валу редуктора.
4.
Последовательно для каждой ступени редуктора вычертить
структурную схему, выполнить проектировочный и проверочные расчеты.
Сделать
выводы.
Спроектировать
открытые
передачи,
которые
дополнительно нагружают быстроходный и тихоходный валы.
5.
Определить силы в тихоходной ступени редуктора. Показать
вектора сил на структурной схеме ступени, изображенной в изометрии.
6.
Вычислить минимальные значения диаметров для всех валов
редуктора. Определить диаметры тихоходного вала под подшипниками и под
колесом. Подобрать типоразмер подшипников для тихоходного вала.
Выписать его геометрические и силовые параметры из справочника.
7.
Изобразить расчетную схему тихоходного вала редуктора.
Обозначить на ней необходимые геометрические и силовые параметры.
Линейные размеры определить с учетом спроектированных ступеней
редуктора, а также принять, что зазор безопасности равен 8 мм и торцы
подшипников расположены в плоскости внутренней стенки корпуса.
8.
Определить реакции в опорах тихоходного вала. Построить
эпюры изгибающих и крутящего моментов под расчетной схемой вала.
9.
Вычислить долговечность подшипников тихоходного вала.
Сделать выводы.
10. Спроектировать соединение колеса с тихоходным валом.
Проверить его работоспособность. Сделать выводы.
11. Оформить типовой расчет в соответствии с ГОСТ 7.32-91 и сдать
его на проверку.
Таблица 1.1
Пример исходных данных
№
пп
1.
2.
3.
4.
5.
Наименование,
размерность
Тип электродвигателя
Мощность электродвигателя N, кВт
Частота вращения вала
двигателя n1, об/мин
Частота вращения ведомого вала n3, об/мин
Срок службы, h, ч
1
2
4А80В4У3
1,5
1415
100
140
Вариант
3
4
5
6
4А100S4У3 4А112М6У3
3
3
1435
120
143
7
8
4А112МВ6У3
4
955
96
950
120
140
120
36 000
7
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
(технический университет)
Кафедра основ конструирования машин
ТЕХНИЧЕСКОЕ ЗАДАНИЕ №1
к курсовому проекту
по курсу "Основы инженерного проектирования"
ТЕМА: Мотор - редуктор
Студент________________
Группа__________________
Схема и краткое описание прототипа
1.
2.
3.
4.
Обозначения:
Электродвигатель
Муфта глухая
Передача зубчатая
коническая
Передача зубчатая
цилиндрическая
Мотор-редуктор с вертикальным ведущим валом применяется для привода
различных устройств, где стесненные условия не позволяют разместить электродвигатель
с горизонтально расположенным валом.
Применяется электродвигатель исполнения МЗОО вертикальный с фланцем на
щите и со станиной без лап.
При проектировании зубчатых передач необходимо (исходя из условий смазки)
иметь примерно одинаковые диаметры конического и цилиндрического зубчатых колес.
Рекомендуемые материалы:
1. Этапы выполнения, методические рекомендации и список литературы
приведены на стенде № 23.
2. Чертежи прототипов редукторов и узлов механизмов находятся в атласах по
деталям машин (авторы: Решетов, Дашкевич, Цехнович и др.)
Рис. 1.1. Пример первого листа бланка технического задания
8
Занятие № 2
СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Цель
занятия:
приобретение навыков построения структурных
и
кинематических схем механизмов, освоение методов
решения задач структурного и кинематического анализа.
Методическое обеспечение: модели механизмов (в аудитории), описание
лабораторной работы с условными обозначениями
кинематических пар (по 1 шт. на студента).
Содержание занятия:
1. Пояснения преподавателя:
- формулируются цели структурного и кинематического анализа и задачи,
решаемые при этом;
- напоминаются определения следующих понятий: структурная схема,
кинематическая схема, деталь, звено, кинематическая пара (КП), высшая КП,
низшая КП, число степеней свободы механизма, передаточное отношение,
передаточная функция;
- на примере кривошипно-ползунного механизма разобрать
и
прокомментировать решение задач структурного и кинематического анализа.
2. Практическое задание:
- провести структурный анализ заданного механизма, т.е.:
= изобразить его структурную схему;
= обозначить номера звеньев и кинематических пар;
= составить таблицу кинематических пар;
= найти число степеней свободы механизма по формуле Чебышева;
- провести кинематический анализ части механизма, т.е.:
= построить кинематическую схему части механизма, необходимую
для определения графика положений заданного выходного звена.
Указать геометрические параметры звеньев и масштаб;
= графическими построениями получить график положений. Указать
цену деления по осям. Дискретные положения звеньев показать
тонкими линиями и точками 0, 1, 2, ... , N;
= графическим дифференцированием получить график аналога
скорости. Указать цену деления по осям.
Таблица 2.1
Исходные данные
№
Название механизма
Название выходного звена
пп
1 Модель паровой машины
Поршень
Золотник
2 Модель ДВС
Поршень
Клапан
3 Модель строгального станка
Кулиса
Резец
4 Модель долбежного станка
Ползун
5 Модель пресса
Ползун
9
Методические рекомендации
Структурная схема механизма изображается с использованием
условных
обозначений
кинематических
звеньев.
Рекомендуется
пронумеровать звенья на схеме арабскими цифрами по порядку, начиная с
ведущего звена (номер 1). Неподвижное звено имеет номер 0.
Кинематические пары обозначаются на схеме римскими цифрами также по
порядку номеров. Под номером I удобнее обозначить пару звеньев:
неподвижная стойка – ведущее звено (0 – 1). Далее по порядку (без
пропусков) обозначаются пары звеньев от ведущего к ведомому.
Для определения числа степеней свободы механизма W предварительно
рекомендуется составить таблицу кинематических пар, содержащую три
колонки с названием:
– номер кинематической пары;
– номера звеньев, составляющих кинематическую пару;
– тип кинематической пары.
Затем вычисляется W по формуле Чебышева:
W 3n 2 p p ,
2
1
где n – число подвижных звеньев; р1 – число высших кинематических пар;
р2 – число низших кинематических пар.
Исходными данными для проведения кинематического анализа
являются структурная схема, необходимые размеры кинематических звеньев,
координаты относительного положения неподвижных точек закрепления и
траектории движения в соответствии с выбранной системой координат. Для
более точных построений нужно изображать кинематическую схему
механизма как можно крупнее (рекомендуется для схемы использовать
полный лист формата А4). Выбираем масштаб М схемы:
М lчерт / lреал ,
где lчерт , lреал – соответственно длина звена на схеме и реальная длина.
На схеме выбрать начальные точки отсчета для координат ведущего и
ведомого звеньев, которые должны соответствовать крайним положениям
этих звеньев. Для ведущего звена прочертить полную траекторию движения
его конечной точки, которая разбивается с определенным шагом
(равномерным, когда это возможно или не равномерным) на части с
выделением дискретных промежуточных положений от точки 0 (начало
отчета) до точки N (конечное положение, которое при циклическом
движении совпадает с началом отсчета). Для каждого дискретного
положения с помощью чертежных инструментов тонкими линиями показать
положения всех звеньев механизма и, таким образом, найти
соответствующие координаты перемещений выходного звена, которые с
10
учетом
выбранного
масштаба
будут
соответствовать
реальным
перемещениям выходного звена.
Построить график положений, т.е. зависимость координаты выходного
звена от координаты входного, предварительно выбрав цену деления х по
осям графика
x xреал / хграф ,
где х – обозначение координаты графика; хреал, хграф – реальное перемещение
и длина соответствующего ему отрезка по оси графика.
Например, для кривошипа, который совершает вращательное
движение, максимальное реальное угловое перемещение составляет 2
радиан, а, исходя из ширины стандартной страницы, соответствующий этому
перемещению отрезок по оси графика выбран 150 мм. Тогда
2 / 150 0,0419 рад/мм.
Использование цены деления позволяет по величине отрезка на
графике определить значение реального перемещения для любого положения
звеньев.
График аналога скорости является зависимостью первой производной
перемещений выходного звена по координате входного звена от
перемещения входного звена. Для его построения ось абсцисс графика
положений разбивается на 15 20 участков, в пределах которого кривая
графика положений заменяется отрезком прямой, тангенс угла наклона
которого к оси абсцисс и даст требуемое значение производной для середины
участка.
Занятие № 3
НАРЕЗАНИЕ ЗУБЧАТЫХ КОЛЕС. ПОСТРОЕНИЕ КАРТИНЫ
ЗАЦЕПЛЕНИЯ
Цель занятия: знакомство с методами нарезания зубьев, изучение параметров
зубчатого зацепления.
Методическое обеспечение: приборы для нарезания колес, синьки парных
колес, описание лабораторной работы по нарезанию (по 1 шт.
на студента).
Содержание занятия:
1. Пояснения преподавателя:
- по плакату обсуждаются существующие методы нарезания зубчатых колес,
их преимущества и недостатки;
- поясняются два возможных случая использования нарезания зубьев со
смещением инструмента;
- показывается как работать с прибором, имитирующим процесс нарезания;
11
- во время выполнения пп. 4, 5 задания на доске показывается
последовательность построения картины и поля зацепления. Поясняется
смысл коэффициента торцового перекрытия.
2. Практическое задание:
- на модели колеса нарезать три зуба без смещения;
- нарезать по одному зубу с положительным и отрицательным смещением;
- определить основные геометрические параметры двух парных зубчатых
колес, нарезанных без смещения инструмента. Записать формулы для их
определения и численные значения в таблицу;
- построить картину зацепления, на которой отрезками показать
действительную линию зацепления и шаг по основной окружности;
- построить поле зацепления. Показать участки одно- и двухпарного
зацепления;
- вычислить коэффициент торцового перекрытия по чертежу и по формуле.
Сравнить их значения;
- сделать вывод о влиянии смещения на форму зубьев.
Методические рекомендации
При нарезании зубьев без смещения инструмента среднее деление на
рейке должно находиться на нулевой отметке шкалы.
Смещение инструмента применяется с целью:
– устранения подреза зубьев при z 17;
– обеспечение стандартного (или заданного) межосевого расстояния.
Направление положительного смещения выбирается от центра колеса.
Необходимая величина смещения b для устранения подреза зубьев
выбирается по коэффициенту смещения х:
х = (17 – z1)/ 17;
b = x m,
где m – стандартный модуль зацепления (указан на рейке), z1 – число зубьев
шестерни (z2 – указано на синьке).
Формулы для определения геометрических параметров колес
приведены в табл. 3.1.
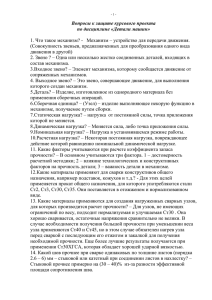
Построение картины зацепления (рис.3.1, а) начинают с откладывания
на вертикальной линии отрезка О1О2, равного межосевому расстояний a w , и
проведения двух основных окружностей диаметрами db1 и db2. Общая
касательная к этим двум окружностям должна находиться под углом w = 200
(стандартный угол зацепления) к линии, перпендикулярной линии центров
О1О2. Точки касания А и В определяют длину теоретической линии
зацепления. При вращении зубчатых колес точки касания эвольвентных
поверхностей зубьев перемещаются по линии АВ. Длина реальной линии
зацепления А1В1 определяется точками пересечения линии АВ с
окружностями вершин колес с диаметрами da1 и da2.
12
Таблица 3.1
Определение параметров зацепления
№ Наименования параметра, обозначения
Формула
пп
1. Шаг по делительной окружности Pt
Pt = m
2. Толщина зуба и ширина впадины по
St = et = 0,5 Pt
делительной окружности St = et
3. Делительные диаметры di
di = m zi
4. Диаметры начальных окружностей dwi
dwi = di + 2 хi m
(при хi 0)
5. Диаметры окружностей впадин dfi
dfi = di – 2,5m
6. Диаметры окружностей вершин dai
dai = di + 2m
7. Шаг по основной окружности Pb
Pb = Pt соs
8. Диаметры основных окружностей dbi
dbi = di соs
9. Длина реальной линии зацепления A1 B1 Определяется по картине
зацепления
10. Торцевой коэффициент перекрытия
черт A1 B1
Pb
(по чертежу) черт
11. Торцевой коэффициент
(расчетный) расч
перекрытия
1 1
расч = 1,88 3,2
z1
z2
12. Межосевое расстояние a
aw = 0,5(d1+d2)
w
13. Передаточное число u
u = z2 / z1
Для визуального наблюдения за динамикой картины зацепления
необходимо изобразить на ней профили зубьев зубчатых колес так, чтобы
одна из точек соприкосновения зубьев совпадала с точкой А1. С этой целью
нужно совместить лист с картинкой зацепления и синьку с колесом 2 таким
образом, чтобы центры О2 совпали, а правая эвольвента левого зуба прошла
через точку А1, и в таком положении перенести профили зубьев с синьки на
картину зацепления.
После этого перенести на картину зацепления профили зубьев колеса 1
(шестерни) так, чтобы они вошли в зацепление с зубьями колеса 2.
Таким образом, будут получены две точки зацепления пар зубьев (А1 и
С). При мысленном вращении колеса 1 по часовой стрелке видно, что в точке
А1 происходит выход из зацепления одной пары зубьев, поэтому в средней
части отрезка А1В1 наблюдается однопарное зацепление (см. рис. 3.1, б, где bw
– ширина колеса). Если мысленно поворачивать колесо 2 по часовой стрелке,
то по краям отрезка А1В1 наблюдается двухпарное зацепление. Когда точка С
дойдет до точки В1, произойдет выход из зацепления второй пары зубьев.
Граница перехода двухпарного зацепления в однопарное определяется шагом
по основной окружности Рb.
13
О1
db1
da1
Колесо 1
w
C В1
А
dОb21
В
аw
А1
da2
pb
Колесо 2
О2
a
bw
pb
I
pb
II
Рис.3.1. Картина (а) и поле (б) зацепления
I, II – участки однопарного и двухпарного зацеплений
14
б
Занятие № 4
СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ АНАЛИЗ
ЗУБЧАТЫХ ПЕРЕДАЧ
Цель занятия: изучение структуры, конструкции, основных кинематических
и силовых соотношений зубчатых цилиндрических и
конических передач.
Методическое обеспечение: модели цилиндрической и конической передач,
натурный двухступенчатый цилиндрический редуктор (в
аудитории), чертежи Д31, Д36, Д26, МУ "Механические
передачи" (по 1 шт. на двоих)
Содержание занятия:
1. Пояснения преподавателя:
- подробно разбирается конструкция двухступенчатого цилиндрического
редуктора по натуре и чертежу Д26;
- кратко поясняются особенности конструкций редукторов на чертежах Д31
и Д36;
- поясняются на примере правила простановки векторов сил (при
разложении на составляющие нужно иметь в виду, что общая сила должна
иметь направление, противоположное крутящему моменту и
перпендикулярное поверхности зуба в точке контакта).
Таблица 4.1
Исходные данные
№ Характеристика
пп
1 Чертеж прототипа
2 Ступень
3
Тип передачи
4
Передаточное
число ступени, u
Мощность на
входном валу
ступени N, кВт
Частота вращения
входного вала
ступени n1, об/мин
5
6
Варианты
1
2
3
4
5
6
Д26
Д31
Д36
Быст- Тихо- Быст- Тихо- Быст- Тихороход ходроход ходроход ходная
ная
ная
ная
ная
ная
Пря- Косо- Косо- ПряПряКосомозубая зубая момозубая
зубая
зубая зубая
От 2 до 6,5 через 0,5 каждому студенту свое
значение
По номеру группы
3000
750
1500
360
960
240
15
2. Практическое задание:
- изобразить структурную схему редуктора (см. исходные данные) с
указанием на ней наклона зубьев, направления вращения и моментов на
всех валах;
- вычислить значения частот вращения и моментов для всех валов
(передаточное число ступеней принять одинаковыми);
- изобразить эскиз своей ступени (см. исходные данные) в изометрии и
показать на нем векторами силы в зацеплении, а также направления частот
вращения, моментов, наклон зубьев. Вычислить силы в зацеплении.
Методические рекомендации
Направление вращения колес в зубчатых цилиндрических и конических
передачах зависит от типа зацепления. При внешнем зацеплении шестерня и
колесо вращаются в разные стороны, а при внутреннем – в одну сторону.
Направления вращающего момента совпадает с направлением
вращения, если к звену приложены движущие силы, т.е. оно является
ведущим. Для ведомых звеньев, к которым приложены силы сопротивления,
направление вращающего момента противоположно направлению движения.
Для промежуточных валов многоступенчатых передач, на которых
закреплены колесо и шестерня, в режиме редуцирования вращающий момент
на колесе является моментом сопротивления, а на шестерне – движущим
моментом.
При определении направлений сил в зацеплении для наглядности
изображается эскиз ступени в изометрии так, чтобы между колесом и
шестерней был условно показан зазор и две точки приложения сил отдельно
для каждого колеса. Выбирается удобная для нас система координат, которая
для тел вращения, обычно, состоит из окружного (индекс t), радиального
(индекс r) и осевого (индекс а) направлений. Направление действия общей
силы в зацеплении определяется с учетом следующих двух правил:
– сила действует по нормали к поверхности соприкосновения зубьев;
– сила направлена против внешнего момента, так как должно выполняться
условие равновесия кинематического звена.
Вектор общей силы раскладывается на составляющие: Ft – окружную,
Fr – радиальную, Fа – осевую силы, направления которых определяются с
учетом выше указанных правил отдельно для шестерни и колеса.
Занятие № 5
ПРОЕКТИРОВАНИЕ ЗУБЧАТЫХ ЦИЛИНДРИЧЕСКИХ И
КОНИЧЕСКИХ ПЕРЕДАЧ
Цель занятия: изучение и практическое освоение методики проектировочного
и прочностного расчетов зубчатых передач.
Методическое обеспечение: модели цилиндрической и конической передач,
натурный двухступенчатый цилиндрический редуктор (в
аудитории), чертежи Д31, Д36, Д26, МУ "Механические
передачи" (по 1 шт. на двоих).
16
Содержание занятия:
1. Пояснения преподавателя:
- напоминаются критерии проектирования и проверочного расчетов
зубчатых передач;
- поясняются критерии выбора материала, термообработки зубчатых колес;
- излагаются возможные мотивы при выборе параметров проектирования.
2. Практическое задание:
- подобрать материал для зубчатых колес, определить допускаемые
напряжения;
- спроектировать зубчатую передачу на заданные параметры;
- проверить прочность зубчатого зацепления и сделать вывод о
работоспособности передачи.
Таблица 5.1
Исходные данные
№ Характеристика
Варианты
пп
1
2
3
4
5
6
1. Срок службы h, ч
5000
3000
10000
7000
15000 24000
2. Рекомендации по
Дешевый материал
Компактная передача
выбору материала
3. Тип нагрузки
Реверсивная
Нереверсивная
Примечание: остальные исходные данные берутся из предыдущего занятия
Методические рекомендации
Проектирование цилиндрических и конических зубчатых передач
ведется из условий контактной выносливости активных поверхностей зубьев.
В цилиндрической передаче основным расчетным геометрическим
параметром, определяющим ее размеры, является межосевое расстояние aw .
В конической передаче – внешней делительный диаметр колеса dе2. Размер
зубьев определяется модулем
m
передачи, величина которого
ограничивается изгибной прочностью. Для цилиндрических передач модуль
обязательно должен быть стандартным, а для конических передач модуль в
каждом сечении колес имеет разное значение, поэтому его, как правило, не
округляют по ГОСТу.
Размер передачи зависит от величины допускаемых напряжений
материала зубчатых колес, которые в свою очередь, зависят от следующих
факторов:
– вида материала (сталь, чугун, латунь, пластмасса, композит и т.д.);
– марки материала (марки стали: Ст.3,10,45…; марки чугуна: СЧ-15, СЧ18…;
и т.д.);
– степени легирования;
– термообработки (например, для стали: нормализация, улучшение, закалка
и т.д.);
17
– технологии получения заготовок (литье, ковка и т.д.);
– типа передачи (прямозубая, косозубая);
– требуемого срока службы.
Чем больше допускаемые контактные напряжения, тем компактнее
получается передача при прочих равных условиях. Но материалы с высокими
прочностными характеристиками являются более дорогими.
Алгоритм
проектирования
практических
любых
изделий
машиностроения состоит из двух частей:
1)
определение геометрических размеров по одному или нескольким
критериям (часто этими критериями являются условия прочности);
2) проверка условий работоспособности.
Для зубчатых передач после проведения проектировочных расчетов и
вычисление основных геометрических размеров колес также проводятся
проверочные расчеты. Проверяется контактная прочность для передачи и
изгибная прочность для зубьев как колеса, так и шестерни.
Расчет считается удовлетворительным, если степень недогрузки по
контактным напряжениям
н
H H
H
составляет не более 10 –15 %.
Здесь H, [H] – соответственно действующие и допускаемые контактные
напряжения.
Допускаемая перегрузка – не более 5%.
Если действующее напряжение намного меньше допускаемых, то это
означает, что прочность материала используется не полностью и размеры
передачи завышены.
Недогрузка по изгибным напряжениям, обычно, бывает на уровне 50%.
Это считается нормальным, так как поломка зуба от изгибных напряжений
является более опасным видом разрушения, чем контактное выкрашивание
активных поверхностей зубьев.
Занятие № 6
ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ
Цель занятия: изучение конструкций и нормативных методов расчета
червячных передач.
Методическое обеспечение: модель червячной передачи,
натурный
червячный редуктор (в аудитории), чертежи Д53, Д54, Д55,
МУ "Механические передачи" (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- разбираются конструкции червячных редукторов по натуре и чертежам.
Поясняется принцип действия передачи, особенности в подборе материалов
18
кинематической пары, влияние наклона витка червяка на направление
вращения колеса, эффект самоторможения и другие особенности червячных
передач;
- на доске поясняется связь между направлениями витков, силами в
зацеплении и моментов;
- напоминается алгоритм проектирования червячной передачи.
2. Практическое задание:
- изобразить структурную схему червячной передачи, указав на ней
направления вращения, моментов, наклоны витков червяка и зубьев колеса,
вектора сил в зацеплении;
- определить нагрузочную способность червячной передачи из условия
контактной прочности при заданных геометрических и кинематических
параметрах (взять с чертежа). Материал венца червячного колеса - СЧ15,
ЛАЖМц, БРАЖ, БРОФ (студентам даются разные типы материалов);
- сравнить нагрузочную способность червячной передачи, определенную из
расчета, с той, которая указана в технической характеристике редуктора;
- сделать вывод о допустимости использования заданного материала колеса
в передаче при исходных технических параметрах исходя из рекомендуемой
скорости скольжения. Если скорость скольжения
не соответствует
рекомендуемой, то найти такие параметры передачи (при неизменных
размерах), при которых допускается использование данного материала.
Таблица 6.1
Исходные данные
№ Характеристика
Варианты
пп
1
2
3
4
5
6
1 Чертеж
Д53
Д54
Д55
прототипа
2 Направление
Правое
Левое
витков червяка
3 Материал венца СЧ15 ЛАЖМц БРАЖ БРОФ СЧ15 ЛАЖМц
4 Срок службы h, ч 5000
3000
10000
7000
15000 24000
Примечание: остальные необходимые исходные данные взять с чертежа.
Методические рекомендации
Структурную схему червячной передачи рекомендуется изображать в
изометрии. Для определения направлений сил и моментов используется те же
правила, что и для зубчатой передачи (см. рекомендации к занятию № 4).
Нагрузочной способностью называется величина допустимой нагрузки,
которая может восприниматься изделием без нарушения условий
работоспособности. Например, это может быть допустимая нагрузка моста
или допустимое давление в сосуде, или допустимый момент затяжки в
резьбовом соединении. Так как в червячной передаче кинематические звенья
совершают вращательное движение, то под нагрузочной способностью
подразумевается допустимый крутящий момент на колесе Т2. А при
19
известных кинематических параметрах (частотах вращения валов) можно
найти максимально допустимую мощность передачи.
На примере условия прочности цилиндрического стержня,
работающего на растяжение, рассмотрим общие типы задач, которые могут
решаться
при
проектировании,
анализе
и
исследованиях
машиностроительных изделий и конструкций.
Условие прочности, используемое в качестве одного из критериев
работоспособности, для цилиндрического стержня, работающего на
растяжение, имеет вид
р
F
р Т ,
S
n
где р, [р] – соответственно действующие и допускаемые напряжения
растяжения; F – растягивающая сила, S – площадь поперечного сечения
стержня; т – предел текучести материала стержня; n – коэффициент запаса.
Тогда имеем следующие типы задач.
Задача проектирования
Искомым параметром являются геометрические параметры стержня.
Так как форма стержня определена (цилиндр), то неизвестным параметром
является диаметр d стержня. Длина стержня может быть любой, так как
напряжения растяжения не зависят от длины. Все остальные параметры
должны быть определены, т.е. нужно задать нагрузку, материал,
коэффициент запаса. Тогда основную проектировочную формулу запишем в
виде
d
4F
.
[ p ]
Проверка прочности
Для этого типа задач должны быть известны нагрузки, геометрические
размеры и допускаемые напряжения. Находятся действующие напряжения и
проверяется выполнение неравенства в исходном условии прочности.
Определение нагрузочной способности
Неизвестным параметром считается нагрузка [F] при заданных
геометрических и прочностных характеристиках стержня, которая
определяется по формуле
F
20
d
p
4
2
.
Определение степени надежности
За степень надежности в детерминированной постановке задачи
отвечает коэффициент запаса прочности n, значение которого всегда больше
единицы. Чаще оно должно быть больше нормативного коэффициента запаса
[n], определяемого стандартами или нормами расчета, исходя из
экспериментальных исследований, опыта проектирования и эксплуатации.
Для обеспечения заданного уровня надежности должно выполнятся
следующее условие
n
Т
n .
Р
В вероятностной постановке уровень надежности определяется
вероятностью безотказной работы Р, которая при нормальном распределении
действующих напряжений P и предела текучести T определяется через
функцию нормального нормированного распределения F (uP) [10]:
Р 1 F (u p ) ,
где
uP
P T
S 2 S 2
P
T
распределения; P , T –
–
квантиль
нормированного
нормального
средние значение случайных величин
действующих напряжений и предела текучести соответственно; S P ,
S T – среднеквадратические отклонения напряжений и предела текучести.
Аналогичные типы задач можно решать из любых других условий
работоспособности.
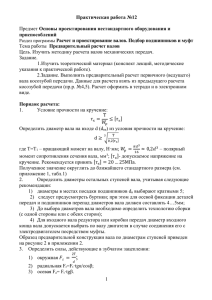
Функция F(uP) представлена на рис. 6.1, а ее значения находятся по
табл. 6.2. При совпадении действующих напряжений с пределом текучести
вероятность безотказной работы равна 50%. При нулевых напряжениях
вероятность отказа P 1 P F u p стремиться к нулю.
Для червячной передачи возможность использования того или иного
материала венца червячного колеса определяется скоростью скольжения.
Если скорость скольжения не соответствует рекомендуемой, то следует
подобрать для нее соответствующие допустимые кинематические параметры
передачи.
В выводе по работе должно быть отражено два аспекта:
– соответствуют ли параметры, указанные в технической
характеристике, условию работоспособности передачи (нагрузки завышены,
занижены)?
– можно ли использовать заданный материал для эксплуатации
редуктора с кинематическими параметрами, указанными в технической
характеристике на чертеже.
21
F(uP)
1,0
0,8
0,6
0,4
0,2
-4,0
-2,0
-3,0
-1,0
0
1,0
2,0
uP
3,0
Рис. 6.1. функция нормированного нормального распределения
Примечания:
F u P 1 F u P ,
где
uP
xx
–
квантиль
нормированного
распределения
случайной
величины x;
F u P
uP
1
2
u2
P
exp 2 du
P
–
функция
нормированного
нормального
распределения.
Занятие № 7
СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ АНАЛИЗ
ПЛАНЕТАРНЫХ ПЕРЕДАЧ
Цель занятия: изучение конструкции, параметров планетарных передач.
Методическое обеспечение: модель планетарной передачи, натурные
многоступенчатые цилиндро-планетарные редукторы (в
аудитории), чертежи 10, МУ "Механические передачи"
(по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- на примере модели поясняется принцип действия планетарной передачи;
вычерчивается на доске структурная схема в двух проекциях с указанием
22
Таблица 6.2
Значения функции нормированного нормального распределения F(uP) в
зависимости от квантили uP
Квантиль Функция Квантиль Функция Квантиль Функция
uP
F(uP)
uP
F(uP)
uP
F(uP)
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
0,75
0,80
0,85
0,90
0,95
1,00
1,05
1,10
1,15
1,20
1,25
1,30
1,35
1,40
1,45
0,500000
0,519939
0,539828
0,559618
0,579260
0,598706
0,617911
0,636831
0,655422
0,673645
0,691462
0,708840
0,725747
0,742154
0,758036
0,773373
0,788145
0,802338
0,815940
0,828944
0,841345
0,853141
0,864334
0,874928
0,884930
0,894350
0,903199
0,911492
0,919243
0,926471
1,50
1,55
1,60
1,65
1,70
1,75
1,80
1,85
1,90
1,95
2,00
2,05
2,10
2,15
2,20
2,25
2,30
2,35
2,40
2,45
2,50
2,55
2,60
2,65
2,70
2,75
2,80
2,85
2,90
2,95
0,933193
0,939429
0,945201
0,950529
0,955435
0,959941
0,964070
0,967843
0,971284
0,974412
0,977250
0,979818
0,982136
0,984222
0,986097
0,987776
0,989276
0,990613
0,991802
0,992857
0,993790
0,994614
0,995339
0,995975
0,996533
0,997020
0,997445
0,997814
0,998134
0,998411
3,00
3,05
3,10
3,15
3,20
3,25
3,30
3,35
3,40
3,45
3,50
3,55
3,60
3,65
3,70
3,75
3,80
3,85
3,90
3,95
4,00
4,05
4,10
4,15
4,20
4,25
4,30
4,35
4,40
4,45
0,998650
0,998856
0,999032
0,999184
0,999313
0,999423
0,999517
0,999596
0,999663
0,999720
0,999767
0,999807
0,999841
0,999869
0,999892
0,999912
0,999928
0,999941
0,999952
0,999961
0,999968
0,999974
0,999979
0,999983
0,999987
0,999989
0,999991
0,999993
0,999995
0,999996
основных элементов; напоминаются преимущества и недостатки
планетарной передачи, необходимость выполнения условий собираемости;
- по чертежу 10 разбирается конструкция одноступенчатого планетарного
редуктора; обращается внимание студентов на назначение и конструкции
плавающих центральных колес, особенности сборки, смазки.
23
2. Практическое задание:
- изобразить структурную схему натурного многоступенчатого цилиндропланетарного редуктора с обозначением на ней чисел зубьев zi всех колес
(один редуктор на бригаду из 3–5 студентов);
- вычислить передаточное число по формуле (подсчитав zi) и определить
его экспериментально как число оборотов ведущего вала, выполненное за
один оборот ведомого;
- для планетарной ступени проверить условия собираемости;
- изобразить силы в зацеплении планетарной ступени, указав также на
схеме направления вращения и моментов. Выписать формулы для
определения сил;
- сделать выводы.
Методические рекомендации
На структурной схеме многоступенчатый редуктор, имеющий
пространственное расположение ступеней, следует изображать в одной
плоскости. У всех кинематических звеньев должны быть показаны опоры для
их закрепления относительно корпуса.
Передаточное число редуктора с последовательным расположением
ступеней вычисляется как произведение передаточных чисел составляющих
ступеней.
Экспериментальное значение передаточного числа определяется как
количество оборотов входного вала редуктора, необходимое для совершения
выходным валом одного оборота (см. определение передаточного
отношения).
При простановке сил в зацеплении используются общие правила,
изложенные в рекомендациях к занятию № 4.
Занятие № 8
ПРОЕКТИРОВАНИЕ ПЛАНЕТАРНЫХ ПЕРЕДАЧ
Цель занятия: изучение особенностей проектирования планетарных передач.
Методическое обеспечение: чертеж Д10, МУ "Механические передачи" (по 1
шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминаются особенности и порядок проектирования планетарных
передач: учет многопоточности, множество вариантов возможных решений
при подборе чисел зубьев и необходимость критериального выбора
определенного варианта (например, из условия min погрешности
передаточного числа или min (исключая подрез) числа зубьев для повышения
изгибной прочности). При обсуждении алгоритма проектирования
указывается на возможные пути решения задачи.
24
2. Практическое задание:
- спроектировать планетарную передачу в составе мотор-редуктора так,
чтобы ее габариты вписались в размер фланца электродвигателя. Из условий
контактной прочности подобрать материал для зубчатых колес.
Таблица 8.1
Исходные данные
№
пп
1
2
3
4
5
6
Характеристика
Передаточное
число u
Мощность
двигателя N, кВт
Синхронная
частота вращения
вала двигателя,
об/мин
Критерий выбора
варианта чисел
зубьев
Срок службы, ч
Нагрузка
Варианты
1
2
3
4
5
6
7
8
От 3,5 до 12 через 0,5 каждому студенту
свое значение
1,5
2,2
3,0
4,0
3000
1500
1000
min погрешности
передаточного числа
5000
10000
Нереверсивная
750
3000
max надежности по
изгибной прочности
зубьев
15000
20000
Реверсивная
Методические рекомендации
Ниже представлены два возможных подхода к проектированию
планетарной передачи (рис. 8.1): необходимость вписаться в заданный
габаритный размер (путь А), проектирование без ограничений габаритов
(путь Б). В первом случае за габаритный размер часто принимают диаметр
фланца электродвигателя dф. С учетом размеров корончатого колеса и
корпуса принимают предварительное значение делительного диаметра
корончатого колеса d3' 0,8dф . Поскольку перед этим числа зубьев всех
колес уже подобраны, то можно легко найти модуль передачи, округлить его
значение до стандартного и затем определить размеры всех колес. Во втором
случае определяется межосевое расстояние a w12 между солнечным колесом
и сателлитом из условий контактной прочности практически по той же
формуле, что и для зубчатой цилиндрической передачи, но при этом
крутящий момент берется для одного потока мощности
Т1'
Т1 К н
,
С
где Т1 – крутящий момент на солнечном колесе; Кн – коэффициент,
учитывающий неравномерность передачи нагрузки по потокам мощности; С
– число сателлитов.
25
От выбора вариантов чисел зубьев Z1, Z2, Z3 для колес солнечного,
сателлита и
корончатого соответственно зависит погрешность
передаточного числа и размер зуба при заданных диаметрах колес. Поэтому
рекомендуется составить таблицу вариантов чисел зубьев и, исходя из
требуемого критерия, выбрать лучший вариант и обосновать этот выбор.
Максимальное число сателлитов ограничивается условием соседства.
Причем, чем больше число сателлитов, тем компактнее получается передача.
Поэтому выбор числа сателлитов также должен быть обоснован
предъявляемыми к передаче требованиями по качеству.
1. Формирование множества вариантов
чисел зубьев и сателлитов
2. Выбор оптимального варианта чисел
зубьев и сателлитов в зависимости
от заданных показателей качества (ПК)
3А. Определение геометрических
параметров передачи исходя из
заданного габарита
3Б. Определение геометрических
параметров передачи из условий
контактной прочности
4А. Подбор материала зубчатых
колес и проверка прочности
передачи
4Б. Проверка прочности передачи
Рис. 8.1. Возможные пути проектирования планетарных передач
Занятие № 9
ПРОЕКТИРОВАНИЕ ПЕРЕДАЧ ВИНТ-ГАЙКА
Цель занятия: изучение назначения, конструкции, особенностей, алгоритма
проектирования передач винт-гайка.
Методическое обеспечение: чертежи Д99, Д100, МУ "Механические
передачи", "Соединения" (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- разбираются конструкции приводов по чертежам Д99 и Д100;
- комментируются методические материалы к проектировочному расчету
передачи винт-гайка скольжения (С. 34 МУ "Механические передачи").
Применительно к конструкциям, изображенным на чертежах Д99 и Д100,
рассматриваются другие возможные критерии проектировочного расчета
передачи винт-гайка, кроме критерия удельного давления
(например,
условие прочности на изгиб при действии боковой нагрузки на винт –
26
чертеж Д100 или критерий устойчивости при действии осевой сжимающей
нагрузки – чертеж Д99).
2. Практическое задание:
- изобразить структурную схему прототипа привода в соответствии с
исходными данными;
- определить основные геометрические параметры винтовой пары по
критерию удельного давления. Выбрать стандартные параметры резьбы;
- провести проверочные расчеты передачи винт-гайка;
- подобрать двигатель (Nдв., nдв.) и передаточное число первой ступени,
соответствующие заданным выходным характеристикам привода в целом.
Таблица 9.1
Исходные данные
№
Характеристика
Варианты
пп
1
2
3
4
5
6
1 Чертеж прототипа
Д99
Д100
2 Осевая нагрузка
10000 20000 30000
40000 50000 60000
на выходе F, Н
3 Скорость
0,05
0,01
0,02
0,3
0,4
0,5
выходного звена
Vвых, м/с
4 Материал гайки
Антифрикцион- Безоловянистая Оловянистая
ный чугун
бронза
бронза
5 КПД 1-й ступени
0,8
0,97
Методические рекомендации
В передаче винт-гайка ведомым звеном может быть как винт, так и
гайка. Для того, чтобы ведомое звено двигалось поступательно, необходимо
в конструкции передачи предусмотреть направляющие, которые фиксируют
выходное звено в окружном направлении. На структурной схеме
направляющие элементы должны быть обязательно показаны.
Параметры резьбы включают в себя: тип резьбы, число заходов,
диаметр и шаг.
Для силовых передач винт-гайка выбирается один из типов ходовых
резьб (трапецеидальная, упорная, прямоугольная). Число заходов влияет на
экономичность, технологичность изготовления, а также на ход резьбы S ,
который, в свою очередь, зависит от соотношений кинематических
параметров на входе и выходе передачи, т.е. от передаточного отношения.
Чем больше число заходов, тем выше кпд передачи, но при этом
изготовление резьбы усложняется.
Диаметр резьбы определяется из расчета на удельное давление. Следует
помнить, что для расчетного значения диаметра имеется несколько вариантов
значений шага резьбы. Поэтому для выбора шага (хода) рекомендуется
составить таблицу возможных вариантов (табл. 9.2).
27
Таблица 9.2
Таблица возможных вариантов шага (хода) резьбы
Частота
вращения
вала
двигателя nдв, об/мин
Частота вращения входного
звена передачи винт-гайка
nвх, об/мин
Диапазон изменения хода
резьбы S , мм
Число заходов резьбы
Варианты стандартных значений шага резьбы Р, мм
3000
1500
1000
750
Частота вращения входного звена передачи винт-гайка находится по
формуле
n
nвх дв ,
uобщI
где uобщI – диапазон общего передаточного числа передач, которые
расположены между двигателем и передачей винт-гайка. Например, для
червячно-винтового привода uобщI = 860, что соответствует значениям
рекомендуемых передаточных чисел для червячной ступени.
По определению, передаточное отношение передачи винт-гайка равно
iвг
где вх
вх
вых
,
nвх
– угловая скорость входного звена, вых – линейная скорость
30
выходного звена. Если передаточное отношение выразить через
перемещения, то получаем следующую формулу:
iвг
2
,
S
так как за один оборот входного звена выходное не перемещается на
величину, равную ходу резьбы. Тогда
S
28
60Vвых
.
nвх
Выбрав число заходов резьбы, по стандартным значениям выбираем
возможные варианты шага резьбы. Дальнейший выбор лучшего варианта
зависит от исходных показателей качества. Например, для увеличения
экономичности выбираются большие значения хода.
Подбор двигателя проводится с учетом ранее выбранных параметров
резьбы, а также по требуемой грузоподъемности привода с учетом потерь во
всех ступенях.
Занятие № 10
ПРОВЕРОЧНЫЙ РАСЧЕТ ВАЛОВ
Цель занятия: изучение и практическое освоение методики усталостного
расчета валов.
Методическое обеспечение: чертежи Д138, Д31, Д36, Д26, Д55, Д57, МУ к
КП Сазонова Ю.И. и "Валы, подшипники, муфты" (по 1 шт.
на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается функциональное назначение валов. По чертежу Д138
сравниваются возможные конструкции ступенчатого и гладкого валов.
Обсуждаются достоинства и недостатки этих вариантов;
- напоминается алгоритм проверочного расчета вала на усталостную
выносливость (построение расчетной схемы, определение реакций в опорах,
построение эпюр, поиск опасных сечений, расчет коэффициентов запаса или
вероятности появления трещины).
2. Практическое задание:
- составить расчетную схему вала. Вычислить силы, действующие со
стороны зацепления;
- определить реакции в опорах;
- под расчетной схемой построить эпюры изгибающих и крутящего
моментов;
- обосновать выбор опасного сечения. Найти коэффициент запаса по
усталостной прочности. Оценить вероятность безотказной работы вала. По
результатам расчетов сделать вывод.
Таблица 10.1
Исходные данные
№ Характеристика
Варианты
9
пп
1
2
3
4
5
6
7
8
1 Чертеж
Д26
Д31
Д55
Д36
Д57
2 Вал
Быстроходный Промежуточный
Тихоходный
20
35
35Х
45
45Х 45ХН
50
3
Материал вала: Ст.3 10
сталь
Примечание: остальные данные взять из чертежа.
29
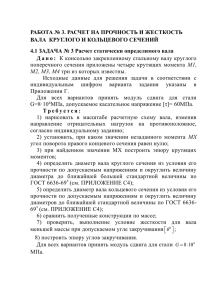
Методические рекомендации
Пример расчетной схемы вала и эпюр моментов представлен на
рис. 10.1. На эпюрах должны быть указаны численные значения и
размерности моментов.
Радиальные реакции в опорах FRX1, FRX2, FRУ1, FRУ2 определяются из
четырех уравнений равновесия: сумма моментов относительно точек 1 и 2,
осей х и у равна нулю. Для проверки используются еще два уравнения:
сумма сил по осям х и у равна нулю.
Выбор опасного сечения производится по ожидаемому минимальному
коэффициенту запаса по усталостной прочности n. Возможные места
расположения опасного сечения определяются следующими основными
факторами:
– максимальными значениями изгибающих и крутящего моментов;
– минимальными значениями моментов сопротивления изгибу и кручению,
которые определяются геометрическими параметрами сечения;
– максимальными значениями коэффициентов концентрации напряжений,
которые зависят от формы и геометрических параметров концентратора.
Поэтому для одного вала может быть выделено несколько опасных
сечений и только после проведения уточненных расчетов может быть сделан
вывод о степени надежности того или иного сечения.
Условие усталостной прочности вала при детерминированном расчете
считается выполненным, если расчетный коэффициент запаса n больше
требуемого нормативного коэффициента запаса [n], т.е.
n [n] .
Обычно принимают [n] = 1,5 2,5 при отсутствии специальных
требований к повышенной надежности.
Вероятностный метод оценки надежности вала заключается в
определении вероятности P неразрушения вала под действием циклических
напряжений [10]:
P 1 F (u p ) ,
где квантиль up определяется формулой
n 1
up
n
2
V21D
Va2
.
Здесь n – коэффициент запаса усталостной прочности, определенный по
средним значениям коэффициентов запаса
n , n по нормальным и
касательным напряжениям; V 1D , V a – коэффициенты вариации предела
выносливости детали и амплитуды напряжений соответственно,
определяющие естественный разброс свойств материала и рассеяние
действующей нагрузки.
30
FR1
Ft2
FRу1
FR2
FRу2
Fа2
Fr2
1
Fr
d1
z
1
d2
FRх1
у
2
Ft1 x
FRх2
l2
l1
l
Мх, Нм
Му, Нм
Мz = Т, Нм
Рис. 10.1 Расчетная схема вала и эпюры моментов
Схема
«враспор»
Fа
S1 1
FА
FА2
1
Схема
«врастяжку»
2 S2
Fа
S1 1
FА1
2
S2
FА2
Рис. 11.1 Расчетные схемы к определению осевых реакций
31
Занятие № 11
РАСЧЕТ ПОДШИПНИКОВ КАЧЕНИЯ
Цель занятия: закрепление знаний методик расчета подшипников качения.
Методическое обеспечение: чертежи Д26, Д31, Д36, Д55, Д57, Д125
МУ "Подшипники качения" (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается студентам порядок расчета подшипников: составление
расчетной схемы вала, определение сил в зацеплении и реакций в опорах,
собственно расчет подшипников.
2. Практическое задание:
- определить долговечность подшипников качения, установленных на
заданном валу; сделать вывод о работоспособности подшипника, если
Lтр = 20000 ч (остальные данные взять с чертежа);
- найти вероятность неразрушения наиболее нагруженного подшипника.
Таблица 11.1
Исходные данные
№ Характеристика
Варианты
9
пп
1
2
3
4
5
6
7
8
1 Чертеж
Д26
Д31
Д55
Д36
Д57
2 Вал
Быстроходный Промежуточный Тихоходный
Примечание: справочные данные по подшипникам с внутренним
диаметром d 100 мм находятся в табл. 11.2
Таблица 11.2
Справочные данные по подшипникам
Номер
чертежа
Номер
подшипника
d
D
B
T
0
Грузоподъемность, кН
C
C0
Геометрические размеры, мм
Коэффициенты
Y
e
D55
7524
7532
120
160
215
290
58
80
62
85
15
14
351
555
379
599
1,46
2,12
0,41
0,28
D31
7622
110
240
80
85
11
490
505
1,82
0,33
Методические рекомендации
Долговечность подшипников качения зависит от следующих факторов:
– частоты вращения вала (должна быть задана);
– динамической грузоподъемности подшипника (берется из справочника);
– эквивалентной нагрузки, действующей на подшипник.
Для определения эквивалентной нагрузки необходимо определить
радиальные и осевые реакции в опорах. Радиальные реакции FR1, FR2
32
определяются с использованием расчетной схемы вала (см. рис. 10.1).
Осевые реакции определяются в зависимости от схемы установки и типа
подшипников.
Схема с фиксирующей и плавающей опорами
В плавающей опоре осевая реакция равна нулю. Если фиксирующая
опора состоит из одного радиального подшипника, то осевая реакция FA в
этой опоре равняется суммарной внешней осевой силе Fа, которая
действует на вал, и имеет противоположное направление. При установке
двух радиально-упорных подшипников в фиксирующей опоре внешняя
осевая сила при нереверсивной нагрузке воспринимается только одним
подшипником, а при реверсивной – попеременно то одним, то другим
подшипником. Величина осевой реакции совпадает с величиной суммарной
внешней осевой силой.
Динамическая грузоподъемность для сдвоенных шарикоподшипников
определяется как [5]:
С = 1,625 С
А для роликовых конических подшипников коэффициент в вышеприведенной формуле равен 1,714.
Схемы «враспор» и «врастяжку»
Для этих схем при установке в опорах радиальных подшипников
внешняя осевая сила воспринимается при нереверсивной нагрузке только
одним из подшипников.
В радиально-упорных подшипниках при таких схемах установки
возникают осевые составляющие S1, S2 радиальных реакций, которые нужно
учитывать при определении осевых реакций. Рекомендуется при этом
использовать расчетные схемы, представленные на рис. 11.1. Важно
пронумеровать опоры таким образом, чтобы внешняя осевая сила Fa
воспринималась всегда подшипником № 2. Тогда за осевую реакцию в опоре
i принимается максимальное значение из двух сил: осевой составляющей Si
в этой опоре и векторной суммы сил, состоящей из осевой составляющей в
другой опоре и внешней силы Fa , т.е.
FA1 max S 2 Fa , S1 ,
FA2 maxFa S1 , S 2 .
Вероятность неразрушения Р подшипника определяется соотношением
C С тр
P 1 F
S c2 S с2тр
,
33
где С – среднее значение динамической грузоподъемности подшипника при
вероятности разрушения 50%:
С С90
1
,
1 u90Vc
C тр – среднее значение требуемой динамической нагрузки
С тр Р э Lh 60n / 10 6
1/ p
,
Sc, Sстр – средние квадратичные отклонения случайных величин С и Стр.
Значения С90 приводятся в справочниках по подшипникам как
динамическая грузоподъемность, соответствующая 90% –й вероятности
неразрушения.
u 90 1,282 – квантиль нормированного нормального распределения,
соответствующая 90%-й вероятности неразрушения.
Коэффициент вариации динамической грузоподъемности Vс для
роликоподшипников равен 0,25, а для шарикоподшипников – 0,27.
Среднее значение эквивалентной нагрузки Р э находят через реакции в
опорах. [Lh] – требуемая долговечность подшипника (в часах), n – частота
вращения вала. Показатель степени р для шарикоподшипников равен 3, а для
роликоподшипников – 10/3.
Занятие № 12
РАСЧЕТ ОПОР СКОЛЬЖЕНИЯ
Цель занятия: изучение конструкций и расчета подшипников скольжения.
Методическое обеспечение: чертежи Д115, Д118, Д26, Д31, Д36, Д55, Д57,
МУ "Валы, подшипники, муфты. Допуски и посадки" (по 1
шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- разбираются конструкции подшипников скольжения по чертежам Д115,
Д118, указываются их преимущества и недостатки;
- по МУ изучаются основные соотношения для определения основных
размеров подшипников скольжения;
- объясняется порядок расчета подшипников скольжения полужидкостного
трения.
2. Практическое задание:
- заменить опоры качения на подшипники скольжения, определив основные
геометрические размеры вкладыша; вычертить эскиз вкладыша;
- проверить условия работоспособности подшипников скольжения для
режима полужидкостного трения. Сделать выводы.
34
Таблица 12.1
Исходные данные
№ Характеристика
пп
1 Чертеж
2 Вал
3 Материал
вкладыша
Варианты
1
2
3
4
5
6
Д26
Д31
Д55
Быстроходный Промежуточный
Бр.O10Ф1 Бр.А9Ж4
Б16
9
7
8
Д36
Д57
Тихоходный
АЧС-1
Методические рекомендации
По форме простейший вкладыш подшипника скольжения представляет
собой втулку.
Размеры вкладыша определяются диаметром вала d и материалом
вкладыша. Толщина вкладыша определяется соотношением
= (0,05 0,1) d,
а длина l – в зависимости от выбранного отношения l/d , которое
рекомендуется брать в диапазоне 0,6 1,0. Если вкладыш стальной, а на
внутренней его поверхности расположена антифрикционная заливка, то
толщину заливки можно определить также по диаметру вала:
0,01d .
Для проверки условий работоспособности подшипника скольжения
необходимо знать нагрузки, которые он должен воспринимать, т.е. реакции в
опорах. Они определяются также, как описывается в рекомендациях к
предыдущим занятиям.
Занятие № 13
ШПОНОЧНЫЕ И ШЛИЦЕВЫЕ СОЕДИНЕНИЯ
Цель занятия: изучение конструкций, методов проектирования и расчета
соединений для передачи крутящего момента.
Методическое обеспечение: модели шпоночных и шлицевого соединений
(в аудитории), чертежи С59, С61, С70, МУ "Соединения",
"Валы, подшипники, муфты" (по 1 шт. на двоих студентов).
Содержание занятия:
1. Пояснения преподавателя:
- на моделях и по чертежам поясняется назначение и разбираются
конструкции шпоночных и шлицевых соединений;
35
- напоминается методика подбора параметров шпонок и шлицев, а также
расчетные формулы для проверки работоспособности этих соединений;
- разбирается конструкция поперечно-свертной муфты по чертежу С70,
обсуждается какие необходимые расчеты нужно сделать для соблюдения
условий работоспособности ее элементов.
2. Практическое задание:
- определить параметры шпонки для муфты по заданному диаметру вала (из
ГОСТа и таблицы на чертеже С70);
- вычислить максимальный крутящий момент, который может передавать
муфта из условия прочности шпоночного соединения;
- заменить шпоночное соединение шлицевым. Определить максимальный
крутящий момент из условия прочности шлицевого соединения;
- вычертить эскизы шпоночного и шлицевого соединений;
- сравнить разные способы соединений полумуфт с валами.
Таблица 13.1
Исходные данные
№
Характеристика
пп
1
1 Материал шпонки:
35
сталь
2 Материал
вала:
Ст.6
сталь
3 Материал
ступицы:
СЧ15
серый чугун
4 Строка таблицы
на чертеже С70
1
(геометрия)
2
Варианты
3
4
5
6
40
45
50
55
60
35X
Cт.3
40XH
10
45XH
СЧ18
СЧ21
СЧ24
СЧ28
СЧ32
2
3
4
5
––
Методические рекомендации
Геометрические параметры шпоночного и шлицевого соединений
определяются ГОСТом по диаметру вала.
На эскизах соединений показать крутящие моменты, приложенные к
соединяемым деталям, а также эпюры напряжений, приложенные к
нагруженным площадкам.
Занятие № 14
РЕЗЬБОВЫЕ СОЕДИНЕНИЯ
Цель занятия: изучение конструкций, методов проектирования и расчета
резьбовых соединений.
Методическое обеспечение: чертежи С41, С44, С70, МУ "Соединения",
"Валы, подшипники, муфты" (по 1 шт. на двоих студентов).
36
Содержание занятия:
1. Пояснения преподавателя:
- по плакату в аудитории напоминается о существовании трех типов
резьбовых соединений, обсуждаются их преимущества и недостатки;
- в конструкция поперечно-свертной муфты по чертежу С70 обращается
внимание на два возможных варианта соединения полумуфт между собой
(болты стоят с зазором и по посадке). При этом указывается на различия
условий работоспособности элементов соединения.
2. Практическое задание:
- определить максимальный крутящий момент, который может передавать
муфта (черт.3 лист С70) по условию прочности болтового соединения
(первоначально болт поставлен с зазором).
- вместо болтов с зазором поставить болты по посадке. Определить диаметр
болтов, поставленных по посадке (нагрузки при этом взять из предыдущего
пункта);
- вычертить эскизы двух вариантов болтовых соединений;
- указать преимущества и недостатки двух вариантов установки болтов.
Примечание: исходные данные взять из предыдущей работы; болты сделаны
из того же материала, что и шпонки.
Методические рекомендации
Болтовое соединение в поперечно-свертной муфте предназначено для
передачи крутящего момента с одной полумуфты на другую. Так как к
ведущей полумуфте приложен движущий момент, а к ведомой – момент
сопротивления, направленный в противоположенную сторону, то муфты
пытаются сместиться друг относительно друга в окружном направлении.
Болтовое соединение должно обеспечить их взаимную неподвижность.
При постановке болтов с зазором неподвижность полумуфт
обеспечивается силами трения, которые возникают на поверхности стыка изза силы затяжки болта, направленной перпендикулярно плоскости стыка.
Болт при этом работает на растяжение и кручение, так как кроме осевой силы
затяжки стержень болта нагружается моментом затяжки, вызывающим
касательные напряжения кручения , т.е. возникает сложное напряженное
состояние и для проверки прочности используется расчет по эквивалентным
напряжениям э по одному из критериев прочности, например,
э 2 3 2 ,
где – напряжение растяжения от силы затяжки Fз.
Для резьбовых соединений из опыта установлено, что вклад
касательных напряжений в величину эквивалентного напряжения составляет
30% от напряжений растяжения, поэтому в качестве критерия прочности
используется выражение
37
э р
1,3Fз
2
d min
/4
,
где штрих означает учет напряжений кручения; dmin – минимальный диаметр
стержня болта; [] – допускаемые напряжения.
Сила затяжки связана с внешней нагрузкой сопротивления Fс
соотношением, которое получается из того условия, что силы трения должны
быть больше сил сопротивления, пытающихся сместить полумуфты
относительно друг друга, т.е.
Fтр Fc ,
или, введя коэффициент запаса k= 1,5 3, переходят к равенству и
вычисляют силу трения через коэффициент трения f и Fз:
fFз kFc .
Сила сопротивления определяется внешним моментом Т:
Fc
2T
,
D0 z
где D0 – диаметр расположения болтов; а z – количество болтов.
При установки болтов по посадке внешняя нагрузка передается через
тело болта, которое работает на срез и смятие. Такое соединение получается
менее металлоемкое, но требует повышенной точности изготовления.
Занятие № 15
МУФТЫ
Цель занятия: изучение назначения, конструкций и методов проектирования
муфт приводов.
Методическое обеспечение: модели муфт (в аудитории), чертежи С70, С72,
С76, С84, С93, С95, МУ "Валы, подшипники, муфты" (по 1
шт. на двоих студентов).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается основная и дополнительные функции муфт;
- разбираются конструкции муфт по чертежам и моделям;
- комментируется по МУ порядок проектирования предохранительных муфт.
38
2. Практическое задание:
- сделать вывод о работоспособности фрикционной муфты (работающей
как предохранительная), изображенной на чертеже (см. исходные данные);
- определить диаметр штифта в предохранительной муфте со срезным
штифтом, сконструированной вместо фрикционной. Принять радиус
расположения штифта равным среднему радиусу поверхностей трения.
Таблица 15.1
Исходные данные
№
Характеристика
пп
1 Номер чертежа
2 Расчетный
крутящий момент
Трас., кН м
3
1
2
C84
0,4
1,0
Варианты
3
4
C93
0,6
1,5
5
6
C95
10
20
Материал штифта:
35
40
45
50
55
60
сталь
Примечания: - варианты геометрических размеров взять из таблиц на
чертежах;
- для листа С84 масштаб 1:2.
Методические рекомендации
Предохранительные муфты должны выполнять две функции:
- передавать номинальный крутящий момент;
- не передавать крутящий момент, который превысил предельно
допустимое значение.
Поэтому вывод о работоспособности фрикционной предохранительной
муфты должен указывать на возможности муфты выполнять эти две
функции. Для этого нужно из условий работоспособности определить
значение крутящего момента, при котором муфта перестанет передавать
момент, и сравнить его с заданным Трас.
39
СОДЕРЖАНИЕ
занятий в 5-м семестре
1. Выдача заданий на курсовую работу
2. Балансировка ротора
3. Исследование кпд червячной передачи
4. Уточнение ТЗ
5. Синтез структур
6. Методы выбора оптимальных решений
7. Контроль шероховатости поверхности
8. Допуски и посадки. Методы контроля размеров цилиндрических изделий
9. Статистический метод контроля технологического процесса
10. Размерные цепи
11. Принципы назначения допусков и посадок
12. Конструирование подшипниковых узлов
13. Конструирование корпусных элементов
14. Проектирование валов
15. Упрощенная эскизная компоновка
16. Уточненная эскизная компоновка
17. Зачетное занятие
Занятие № 1
ВЫДАЧА ЗАДАНИЙ НА КУРСОВУЮ РАБОТУ
Методическое обеспечение: бланки заданий на КП (по
количеству
студентов), МУ "Механические передачи" и к КП Сазонова Ю.И.
(по 1 шт. на двоих).
Содержание занятия:
- преподаватель информирует студентов о порядке выполнения курсового
проекта (первые две части курсового проекта выполняются в виде типового
расчета в четвертом весеннем семестре и в виде курсовой работы в пятом
осеннем семестре): содержание задания, объем проекта, сроки выполнения,
отчетность. Выдается задание на проект и МУ. Технические задания
содержатся
в бланках и на стенде № 23. Варианты
технической
характеристики привода и дополнительных требований приведены в
бланках заданий.
Например: Задание № 235/6123 расшифровывается так: 235 – номер задания,
6 – номер варианта технической характеристики, 123 – номера
вариантов соответствующих дополнительных требований.
- студенты переписывают техническое задание с бланка в рабочую тетрадь и
знакомятся с содержанием стенда № 23.
- проект выполняется студентами самостоятельно
при
консультациях
преподавателя
40
Описание задания:
Курсовая работа является продолжением типового расчета и второй
составной частью курсового проекта.
В типовом расчете были проведены основные проектировочные
расчеты для заданной схемы прототипа привода. В курсовой работе
необходимо найти схему привода, альтернативную заданной и наилучшим
образом отвечающую требуемым показателям качества. После выполнения
упрощенных эскизных проектов обоих вариантов обоснованно выбирается
лучшее решение.
В курсовом проекте выполняются технический и рабочий проекты
лучшего варианта привода.
Подробные формулировки заданий на курсовую работу и курсовой
проект приведены ниже, а в табл. 1.1 представлены варианты
дополнительных требований, предъявляемых к объекту проектирования.
Задание на курсовую работу
1. Уточнить техническое задание с учетом дополнительных требований. С
этой целью определить иерархическую структуру объекта проектирования
(ОП), построить дерево целей, дополнить исходные данные новыми
условиями, ограничениями, обосновать выбор двух показателей качества.
Сформулировать уточненное техническое задание.
2. Провести структурный синтез возможных вариантов передаточных
устройств с выбором одного лучшего варианта, альтернативного заданной
схеме прототипа привода. Проиллюстрировать в пространстве ПК выбор
лучшей структуры.
3. Выполнить проектировочные и проверочные расчеты передач, входящих
в альтернативный вариант привода.
4. Вычислить минимальные диаметры для всех валов редуктора
альтернативной схемы.
5. Спроектировать
корпусные элементы для двух редукторов,
соответствующих исходной и альтернативной схемам.
6. Вычертить упрощенные эскизные проекты для двух (исходного и
альтернативного) конструктивных вариантов редукторов на миллиметровке.
7. Определить численные значения показателей качества обоих вариантов
редукторов, провести их сравнения и выбрать лучшее решение.
8. Спроектировать узел одного из вариантов редуктора с закрепленными на
нем колесом и подшипниками в корпусе. Вычертить эскиз узла в масштабе
1:1 на миллиметровке. Проставить на нем необходимые размеры и посадки.
9. Оформить первую часть расчетно-пояснительной записки и сдать ее на
проверку.
Задание на курсовой проект
(работа выполняется для лучшего варианта привода)
1. При наличии устройств, встроенных в элементы передач редуктора
(встроенные муфты, синхронизаторы, тормозные, управляющие устройства),
выполнить для них необходимые проектировочные и проверочные расчеты,
41
сконструировать сборочную единицу. Если узел не связан с деталями,
расположенными внутри корпуса редуктора, то его конструкцию можно
разрабатывать отдельно, согласовав присоединительные размеры.
2. Определить
способы смазки зацепления и подшипников,
уплотнительные устройства. Спроектировать или подобрать для этих целей
необходимые элементы конструкции.
3. Уточнить конструктивные формы и размеры деталей редуктора,
упрощенно спроектированных ранее. А именно:
найти формы, размеры основных и переходных участков валов;
уточнить размеры, типы и схемы установки подшипников;
определить формы и размеры колес;
окончательно спроектировать все элементы корпуса.
4. Спроектировать
и проверить прочность всех соединений,
предназначенных для передачи крутящих моментов. Спроектировать
необходимые резьбовые соединения.
5. На базе упрощенного эскизного проекта выполнить технический
(сборочный) чертеж редуктора на миллиметровке в нужном количестве
проекций.
6. Составить расчетные схемы для всех валов. Определить реакции в
опорах. Вычертить эпюры изгибающих и крутящего моментов.
7. Для наиболее нагруженного вала провести проверку прочности в
опасных сечениях. В червячной передаче проверить жесткость червяка.
8. Проверить условия работоспособности всех опор.
9. При опасности перегрева провести тепловой расчет и обеспечить
допустимый тепловой режим работы.
10. При необходимости внести соответствующие изменения в
конструкцию и для всех элементов добиться выполнения требуемых условий
работоспособности.
11. Составить и оформить спецификацию редуктора. Позиции деталей
проставить на чертеже.
12. Проставить на чертеже присоединительные, установочные,
габаритные размеры, а также размеры с посадками на основные сопряжения
деталей.
13. Для характерных посадок (5 – 8 шт.) вычертить схемы посадок,
определить характер сопряжений, вычислить предельные зазоры (натяги).
14. Выявить недостатки спроектированной конструкции с учетом
заданных показателей качества и наметить пути их устранения
конструктивными способами.
15. Выполнить чертеж редуктора с учетом возможных конструктивных
модификаций всех его основных элементов.
16. Выполнить на ватмане:
сборочный чертеж лучшего варианта редуктора (см. п.5);
сборочный чертеж модифицированной конструкции (см. п.15);
чертеж узла (см. п.1);
рабочие чертежи деталей (4 – 6 шт., по указанию преподавателя).
42
17. Оформить полностью (включая I часть) расчетно-пояснительную
записку к курсовому проекту и сдать ее на проверку. Подготовиться к защите
курсового проекта.
Таблица 1.1
Дополнительные требования
Дополнительная функция
№
Наименование
Требование по качеству
№ Привод должен быть
(иметь)
1. Дешевым
№
Ограничение
Не применять
1.
Защита от перегрузок
2.
Защита от динамических
нагрузок
Обеспечить
циркуляционную смазку
Защита от повышенной
запыленности
Защита от шума
2.
Компактным
2. Цветных металлов
3.
Легким
3. Открытых передач
4.
5.
Малую площадь
основания
Малую высоту
4. Подшипников
качения
5. Литья корпуса
Корпус редуктора
является фундаментом
для электродвигателя
6.
Надежным
6. Привертных крышек
подшипников
3.
4.
5.
6.
1. Дорогих материалов
Занятие № 2
БАЛАНСИРОВКА РОТОРА
Цель занятия: изучение методики динамической балансировки ротора на
балансировочном станке
Методическое обеспечение: балансировочные станки ТММ1А (в аудитории)
и описание лабораторной работы по балансировке (каждому
студенту)
Содержание занятия:
1. Пояснения преподавателя:
- напоминается студентам о динамических явлениях, происходящих в
машинах с вращающимися роторами (центробежные силы, дисбаланс, его
причины, колебания, резонанс, его последствия);
- студенты знакомятся с описанием устройства балансировочного станка и
методикой проведения динамической балансировки ротора;
- поясняется графически метод трех пусков и способ графического
определения
величины
неуравновешенности
и
угла
установки
уравновешивающего груза.
2. Практическое задание:
- изобразить кинематическую схему станка ТММ1А;
- определить амплитуды колебаний ротора при трех пусках;
43
- определить графически Ад и угол установки уравновешивающего груза;
- определить расчетом Ад, Rп и угол п (в случае несовпадения графического
и аналитического решений, отыскать и устранить ошибки);
- проверить качество балансировки ротора, определив величину остаточной
неуравновешенности. Сделать выводы.
Методические рекомендации
При вращении деталей, у которых центр масс не лежит на оси
вращения возникают силы и моменты инерции, вызывающие
дополнительные нагрузки на подшипники, прогибы вала, вибрацию. Условно
все вращающиеся системы будем называть роторами. При совпадении
частоты возмущающей силы с частотой собственных колебаний системы
возникает явление резонанса, при котором происходит резкое повышение
амплитуды колебаний, что может стать причиной разрушения ротора.
Параметры, определяющие степень неуравновешенности ротора,
называют дисбалансом DС, и главным моментом дисбаланса МD.
Дисбаланс – это векторная величина, равная произведению массы m
на радиус-вектор эксцентриситета r
Dс mr .
Главный момент дисбаланса определяется соотношением
М D mrl ,
где l – расстояние от плоскости расположения неуравновешенной массы до
плоскости, проходящей через центр масс уравновешенного ротора (рис. 2.1,
буквой
Р
обозначены соответствующие силы инерции). Полная
динамическая уравновешенность ротора достигается при выполнении
условий
Dc 0 , M D 0 .
Если выполняется только первое условие, то считается, что выполнена
статическая балансировка. Например, ротор на рис. 2.1 можно уравновесить
статически, если в любой плоскости установить корректирующий груз
массой mс на радиусе-векторе rс, имеющем направление, противоположное
направлению начального эксцентриситета. При этом должно выполняться
условие
mr mc rc .
Такой балансировки бывает достаточно, если ротор имеет небольшие осевые
размеры.
44
r
P = m2 r
m
Pg = mg2 rg
mg
Y
rg
rg
S
mg
Z
rп
X
Pg = mg2 rg
mп
rс
l
mс
L/2
L
Pc = mc2 rc
Рис. 2. 1. Схема балансировки ротора
r = A3
А1
r = A2
А3
Ад
-Ад
180 на
шкале
диска
0 на
шкале
диска
n
r = A2
r = A3
-А1
Рис. 2. 2. Графическая диаграмма для определения параметров балансировки
45
При больших осевых размерах необходимо проводить динамическую
балансировку, так как после статической балансировки остается моментная
неуравновешенность относительно оси Х, равная
M x mc rc
L 2
L
mrl 2 mr 2 l .
2
2
Этот момент уравновешивается парой сил Pg , которые располагаются в
двух параллельных плоскостях (обычно крайних торцевых),
М g Рg L mg rg 2 L ,
где
mg
, rg
– соответственно масса и радиус расположения
уравновешивающих грузов.
В правой плоскости обе массы mс и mg можно заменить одной
массой противовеса mп , расположив ее на радиусе rп и соблюдая при этом
условие
mп rп mс rс m g rg .
Таким образом, чтобы обеспечить полную динамическую балансировку
ротора нужно для двух плоскостей балансировки определить следующие
параметры:
mп – массу противовеса;
rп – радиус расположения противовеса;
п – угол расположения противовеса;
п 180 , где – неизвестный угол первоначальной
неуравновешенности.
Применяемый для балансировки метод трех пусков основан на том, что
максимальная амплитуда колебаний ротора пропорциональна дисбалансу,
причем плоскость колебаний определяется углом . Поэтому искомые
параметры: амплитуду добавочного груза Ад и угол п можно определить
графически (рис. 2.2).
Первоначальная амплитуда А1 располагается под неизвестным углом
по отношению к шкале на диске балансировочного станка. Чтобы ротор был
уравновешен,
противовес
должен
создавать
амплитуду
–
А1
противоположного направления. Вектор А2 является суммой векторов А1 и
Ад, а вектор А3 – суммой А1 и - Ад. Для нахождения Ад и п откладываем от
вершин векторов А1 и -А1 дуги окружностей радиусами А2 и А3 по обе
стороны от линии расположения векторов А1 и -А1. Получаем две точки,
расстояние между которыми равно 2 Ад. Угол п показан на рис. 2.2.
Графическую диаграмму нужно строить в масштабе.
46
Занятие № 3
ИССЛЕДОВАНИЕ КПД ЧЕРВЯЧНОЙ ПЕРЕДАЧИ
Цель занятия: изучение конструкции электромеханического привода,
освоение экспериментальных методов исследования кпд
привода
Методическое обеспечение: прибор ДП-4 (один на четырех студентов),
тарировочные графики для каждого прибора, описания
"Лабораторные работы по курсу "Основы конструирования".
Конструирование узлов механических передач" (по 1 шт. на
двоих).
Содержание занятия:
1. Пояснения преподавателя:
- на примере конструкции прибора ДП-4 разбираются назначение и
составные части любого привода;
- показывается методика измерений кинематических и силовых параметров
привода, в том числе при помощи тарировочных графиков.
2. Практическое задание:
- изобразить схему прибора ДП-4 с обозначением основных составляющих
элементов;
- записать в отчет основные технические параметры червячного редуктора,
а также скопировать тарировочные графики и выписать формулы для
пересчета размерности результатов измерения моментов с помощью
индикатора (в мм) в Нмм;
- исследовать зависимость кпд () от нагрузки на выходном валу (Т2) при
постоянной частоте вращения входного вала (n1 – const), для чего провести
необходимые измерения и результаты записать в табл.3.1. По результатам
измерений построить график зависимости = f(Т2) при n1 – const;
Таблица 3.1
Номер
Коэффициент
Крутящий момент при n1=
об/мин
опыта
полезного
На валу
На выходном валу
действия
электродвигателя
Показания
Показания
Т 1,
Т2,
индикатора,
индикатора,
Нмм
Нмм
мм
мм
1.
2.
3.
4.
- исследовать зависимость кпд () от частоты вращения вала
электродвигателя (n1) при постоянной нагрузке на выходном валу (Т2 –
const), для чего провести необходимые измерения и результаты записать в
47
табл.3.2. По результатам измерений построить график зависимости
= f(n1) при Т2 – const;
Таблица 3.2
Номер Результаты измерения при постоянном моменте
Коэффициент
опыта
полезного
на выходном валу Т2 =
Нмм
действия
Крутящий момент на валу
Частота вращения
электродвигателя
вала
электродвигателя
Показания
Т1,
индикатора,
n1 , об/мин
Нмм
мм
1.
2.
3.
4.
- сделать вывод о влиянии параметров нагружения на кпд привода.
Таблица 3.3
Исходные данные
№ Характеристика
пп
1. Частота вращения
вала электродвигателя n1 ,
об/мин
2. Крутящий момент
на выходном валу
Т2, Нмм
1
700
2
800
Варианты
3
4
900
1000
1800
1600
1500
1300
5
1100
6
1200
1100
900
Методические рекомендации
По определению, кпд () является отношением полезной мощности N2
к затраченной N1, т.е.
N2
.
N1
При вращательном движении мощность выражается произведением
момента на угловую скорость. Следовательно,
N1 T11 ,
N 2 T2 2 .
Тогда, учитывая, что передаточное отношение i12 по определению
определяется выражением
48
i12
1
,
2
кпд можно вычислить по формуле
T2
.
T1 i12
Теоретическое значение кпд вычисляется по формуле
tg
,
tg
где – угол подъема витков червяка; – приведенный угол трения.
Угол зависит от геометрических параметров червячной передачи, а на
угол трения оказывают влияние свойства материалов червячной пары,
условия смазки и скорость скольжения. Поэтому вывод по работе должен
основываться на результатах анализа экспериментальных данных и
теоретических зависимостей.
Занятие № 4
УТОЧНЕНИЕ ТЕХНИЧЕСКОГО ЗАДАНИЯ
Цель занятия: изучение понятий иерархической структуры, дерева целей,
условий, ограничений, показателей качества; освоение
методики уточнения технического задания (ТЗ).
Методическое обеспечение: чертежи подшипника (Г21), стопорного клапана
(Г135), лебедки (Г91), масляного насоса (Г81), компрессора
(Г149), клапана автоматического (Г117), учебное пособие:
Корж Д.Д., Хорошев А.Н. Этапы проектирования
механического привода. М.: Издательствово МЭИ, 1997.
Содержание занятия:
1. Пояснения преподавателя:
- напоминается структура процесса проектирования и обосновывается
необходимость первого этапа (уточнение ТЗ), целью которого является
осуществление перехода от общей формулировки задания заказчиком к
определению как можно более полной совокупности исходных данных для
проектирования объекта;
- расшифровывается мнемоническая запись результатов выполнения этого
этапа:
Т‚ Ф Д У, О, К ,
которая обозначает, что в результате уточнения ТЗ должна быть
сформулирована проектируемая функция (Ф) и найдена совокупность (Д)
исходных данных в виде условий (У), ограничений (О) и показателей
качества К ;
- поясняется, что носителем функции (Ф) является объект проектирования
(ОП), который нужно четко определить через анализ надсистемы (НС); для
49
этого необходимо построить иерархическую структуру ОП, выделив
несколько уровней иерархии.
- рекомендуется проанализировать связи ОП со всеми элементами
иерархической структуры с целью определения У и О;
- для определения показателей качества строится «дерево» целей;
- после уточнения ТЗ рекомендуется все исходные данные свести в
таблицу.
Таблица 4.1
Исходные данные
Объект,
чертеж
Подшипник
Г21
Стопорный
клапан
Г135
Лебедк
а
Г135
Масляный
насос
Г81
Компрессор
Г149
Клапан
автоматический
Г117
Начальные d - диаметр вала Р - давление N-мощ- Р - давление PВ - давление Р - давление
исходные l - длина цапфы среды
ность
масла
нагнетания
среды
данные
G - расход
V- ско- G - расход
(на выходе)
G - расход
среды
рость
масла.
РН - давление среды
троса
И-30 -марка начальное
масла.
ПодсистеЗадается каждому студенту после построения иерархической структуры
ма
Основное
Дешевый
Надежный
Легкий Красивый
КомпактЭконотребование
ный
мичный
по качеству
2. Практическое задание:
- построить иерархическую структуру заданного объекта. Определить
основные элементы надсистемы и подсистемы объекта;
- сформулировать функции (Ф) элементов иерархической структуры;
- для заданной подсистемы (ОП) проанализировать связи с другими
элементами и определить параметры (У,О), оказывающих влияние на ОП;
- построить дерево целей и определить состав показателей качества R ;
- все исходные данные свести в таблицу и сформулировать уточненное ТЗ.
Методические рекомендации
Надсистема представляет собой совокупность объектов, находящихся
на одном уровне иерархии с исследуемой системой. Например, для лебедки,
предназначенной для подъема груза на крышу пятиэтажного дома, в
надсистему войдут объекты: двигатель, груз, фундамент или рама, дом,
окружающая среда (действие силы тяжести, осадки и прочее).
Подсистемы объекта представляют собой его составные части. Но для
правильного определения иерархической структуры нужно выделить
несколько уровней иерархии. На каждом уровне должны находиться
подсистемы примерно одной функционально-конструктивной значимости.
Например, будет ошибкой, если для лебедки на одном уровне иерархии
расположить редуктор и вкладыш подшипника барабана. Необходимо
придерживаться функционального принципа декомпозиции заданной
системы.
50
Формирование исходных данных происходит во время анализа
функциональных, конструктивных и других связей объекта проектирования с
элементами надсистемы, оказывающими непосредственное влияние на ОП
или определяющими его свойства.
При построении дерева целей нужно выявить параметры, от которых
зависит достижение заданных требований по качеству, т.е. рекомендуется
провести декомпозицию основного требования по качеству и найти
количественные показатели ОП, монотонное изменение которых повышает
качество ОП. Примеры построения иерархической структуры и дерева целей
приведены в учебном пособии [9] из списка учебников и учебных пособий.
Занятие № 5
СИНТЕЗ СТРУКТУР
Цель занятия: практическое освоение метода синтеза вариантов структур
механических передач.
Методическое обеспечение: чертежи Д15, МУ к КП Сазонова Ю.И. и
"Механические передачи" (по 1 шт. на двоих)
Содержание занятия:
1. Пояснения преподавателя:
- комментируется таблица рекомендуемых передаточных чисел для разных
типов передач;
- поясняется необходимость учета заданных условий по взаимному
расположению входного и выходного валов, а также их расположения в
пространстве;
- разбираются два способа учета возможных ограничений (не применять
дорогих
материалов, открытых передач, сложных технологических
процессов
изготовления или сборки и т.д.) либо отбрасыванием из
рассмотрения
элементарных структур, не отвечающих заданным
ограничениям, либо усечением множества после формирования всех
возможных вариантов структур с учетом значений передаточных чисел;
- напоминается методика сравнения вариантов структур по заданным
показателям качества и предварительного выбора лучших решений с
помощью списков преимуществ и недостатков, бинарных матриц,
ранжирования вариантов.
2. Практическое задание:
- составить таблицу возможных вариантов структур передаточных
механизмов на заданное передаточное число;
- с учетом заданных ограничений провести усечение сформированного
множества решений;
- для оставшихся вариантов изобразить структурные схемы так, чтобы они
отвечали заданным условиям расположения валов (используются чертежи
Д15 и стенды с элементами кинематических схем);
51
- выбрать две структуры, отвечающие лучшим значениям показателей
качества.
Таблица 5.1
Исходные данные
№
Характеристика
пп
1 Передаточное
число
2 Взаимное
расположение
входного и
выходного валов
3 Расположение
выходного вала
Варианты
1
2
3
4
u=(15-N)n, где N - номер группы, n - номер
студента по списку
Параллель Соосно
Скрещива- Пересека-но
ющиеся
ющиеся
перпендиперпендикулярно
кулярно
ГоризонГоризонВертикаль- Вертикальтально, 1 тально, 2 но вверх
но вниз
выходной выходных
конец
конца
4 Ограничение:
Дорогих
Открытых Передач,
Колес с
не применять
материапередач
требующих внутреннилов
осевой ре- ми
гулировки
зубьями
расположения колес
5 Показатели
Габариты, Высота,
Площадь
Масса,
качества
кпд
масса
основания, кпд
кпд
Примечание: могут использоваться исходные данные из курсового проекта
Методические рекомендации
Общее передаточное число механизма вычисляется как произведение
передаточных чисел всех последовательно расположенных ступеней. При
формировании таблицы возможных вариантов структур передаточных
механизмов с целью экономии времени рекомендуется ограничиться тремя
ступенями. Варианты структур выбираются с учетом рекомендуемых
значений передаточных чисел для каждой ступени [8]. Сначала выбираем
одноступенчатые передачи. Для двухступенчатых передач выбираем любой
подходящий тип первой ступени, находим передаточное число для второй
ступени и перебираем все возможные типы передач, соответствующие этому
передаточному числу. Потом берем следующий подходящий тип первой
ступени и аналогично перебираем все возможные варианты второй ступени.
Таким же образом находим все возможные варианты структур для
трехступенчатой схемы. Полученная таблица должна содержать все
возможные схемы (в пределах трех ступеней) передаточных механизмов,
которые соответствуют только передаточному числу.
52
В техническом задании могут содержаться определенные требования
или условия, которым противоречат ряд схем. Поэтому необходимо провести
усечение полной таблицы вариантов и удалить из нее неподходящие схемы.
Нельзя просто так отбрасывать непонравившиеся схемы. Всегда нужно
пытаться найти обоснование принимаемому решению.
Оставшиеся схемы представляют область допустимых решений.
Дальнейший выбор оптимальных (или лучших) решений производится по
оценкам показателей качества (ПК). На этапе структурного синтеза
сложность оценки ПК заключается в том, что еще не определены численные
значения параметров объекта проектирования, например, неизвестны его
масса, габариты, стоимость, – поэтому количественные оценки сделать
затруднительно. Чтобы немного облегчить задачи сравнения между собой
оставшихся вариантов рекомендуется вычертить структурные схемы
передач, использовать таблицу сравнительных характеристик [9] и бинарные
матрицы.
Занятие № 6
МЕТОДЫ ВЫБОРА ОПТИМАЛЬНЫХ РЕШЕНИЙ
Цель занятия: освоение методов параметрической оптимизации.
Методическое обеспечение: чертежи Д26, Д36, Д72, Д54 (по 1шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается схема построения дерева целей, с помощью которого
назначаются показатели качества; поясняется, каким образом можно
установить относительную важность ПК (ранжировать их, назначить
весовые коэффициенты): с помощью дерева целей, бинарной матрицы;
- на простом примере проиллюстрировать выбор оптимального решения по
Парето в пространстве двух показателей качества (см. рис. 6.1); обратить
внимание на графическое представление целевой функции и как влияют
значения весовых коэффициентов на выбор решения; показать как
проводится аналогичная свертка для большего числа ПК.
2. Практическое задание:
- выбрать лучший вариант редуктора из четырех, изображенных на чертежах
Д26, Д36, Д72, Д54, по нескольким ПК; при этом считается, что все они
сконструированы на одни и те же параметры: N = 10 кВт, n1 = 1000 об/мин,
u = 20 (геометрические параметры по чертежу, кпд оценить ориентировочно
по типу передачи); для этого:
а) изобразить структурные схемы всех четырех вариантов;
б) построить дерево целей, выделив при этом не менее трех ПК (возможные
ПК: масса, габариты, высота, площадь основания, кпд, простота конструкции
(оценивается, например, по количеству деталей), надежность (оценивается,
например, по количеству кинематических пар или по количеству основных
элементов, лимитирующих прочность конструкции, т.е. передачи, валы,
подшипники и т.д.), красота (субъективный показатель);
53
в) оценить значения ПК для всех вариантов; данные занести в табл.;
г) найти оптимальное решение с учетом двух наиболее важных ПК
(остальные переводятся в ограничения), считая их равноценными;
проиллюстрировать выбор решения в пространстве ПК;
д) ранжировать ПК с помощью бинарной матрицы, найти значения весовых
коэффициентов;
е) найти оптимальное решение для всех ПК, учитывая их веса;
- сделать общие выводы по результатам проделанной работы.
Методические рекомендации
Выбор паретооптимального решения для n показателей качества
проводится по минимальному значению аддитивной целевой функции,
которая для каждого i-го решения ( i = 1…N, где N – число объектов)
вычисляется по формуле
n
f i j k ij ,
j 1
где
k ij – численное значение j-го показателя качества, j – весовой
коэффициент j-го показателя качества.
Причем сумма весовых коэффициентов для всех ПК должна равняться
единице. Ниже приводится пример выбора оптимального варианта.
Задача. Выбрать оптимальное решение по двум ПК (m – масса, Ц –
цена) из трех объектов, численные значения массы и цены для которых
приведены в табл. 6.1.
Решение. Сравнение объектов по ПК, имеющим разные размерности,
необходимо проводить с использованием безразмерных характеристик
(табл. 6.2). Нужно стремиться к тому, чтобы диапазон шкал для данных ПК
был одинаковым. В табл. 6.3 и 6.4 представлены оценки объектов при
равноценных и неравноценных ПК, а на рис. 6.1 проиллюстрирован выбор
оптимальных решений в пространстве ПК (начало координат соответствует
ИКР – идеальному конечному результату).
Таблица 6.1
Параметры объектов
Номера
объектов
I
II
III
54
Численные значения параметров
Масса m, кг
Цена Ц, руб
3
20
2,5
30
4
60
km
6
5
III
4
I
3
II
2
fmin
1
ИКР
1
1
2
3
4
5
6
7
kЦ
а
km
Кm
5
III
4
3,25
44
445
53
44
52
44
51
44
5
ИКР
1
I
II
1
44
5
2
44
5
3
44
5
fmin
4
44
5
5
44
5
6
44
5б
7
44
5
8
44
5
9
44
5
10 11 12 13
445 445 445445
kЦ
Рис. 6.1. Иллюстрация выбора решений в пространстве
ПК при равноценных (а) и неравноценных (б)
критериях
55
Таблица 6.2
Таблица соответствия размерных и безразмерных характеристик
Масса
Цена
кг
Безразмерная
шкала km
руб
Безразмерная
шкала kЦ
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
10
20
30
40
50
60
70
80
90
100
1
2
3
4
5
6
7
8
9
10
Таблица 6.3
Оценка объектов при равноценных критериях
Критерий
Значения безразмерных ПК (kij)
Объект I
Объект II
Объект III
Масса
3
2,5
4
Цена
2
3
6
5
5,5
10
Таблица 6.4
Оценка объектов при неравноценных критериях
Критерий
Весовые
коэффиц
иенты
k1j
j k1j
k2j
j k2j
K3j
j k3j
0,8
0,2
1,0
3
2
–
2,4
0,4
2,8
2,5
3
–
2,0
0,6
2,6
4
6
–
3,2
1,2
4,4
j
Масса
Цена
Объект I
Значения характеристик объектов
Объект II
Объект III
Занятие № 7
КОНТРОЛЬ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ
Цель занятия: изучение и практическое освоение методов определения
шероховатости поверхностей.
Методическое обеспечение: образцы чистоты поверхностей (стенд),
микроскопы МИС-11 (в аудитории), описания лабораторных
работ по курсу "Стандартизация, метрология и основы
взаимозаменяемости" (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминаются: понятие шероховатости поверхности; параметры, ее
характеризующие;
- перечисляются существующие методы определения шероховатости;
- поясняется и комментируется последовательность выполнения работы.
56
2. Практическое задание:
- определить шероховатость поверхности образца визуальным методом,
результат записать в отчет, указать
вид
механической обработки
поверхности образца;
- зарисовать изображение, видимое в микроскоп, показать на эскизе
измеряемую величину;
- провести измерения высот микронеровностей, результаты записать в
таблицу;
- вычислить значение параметра шероховатости поверхности образца;
- указать действительную величину и класс шероховатости и сравнить
визуальный и оптический способы определения шероховатости.
Методические рекомендации
Измерение координат точек вершин и впадин микронеровностей
профиля следует проводить только по какой-то одной из выбранных сторон
световой линии, не учитывая ее толщину.
Занятие № 8
ДОПУСКИ И ПОСАДКИ. МЕТОДЫ КОНТРОЛЯ РАЗМЕРОВ
ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ
Цель занятия: изучение понятий единой системы допусков и посадок
(ЕСДП), методов контроля цилиндрических изделий
непосредственным измерением и при помощи регулируемых
калибров.
Методическое обеспечение: цилиндрические валики со втулками,
микрометры, наборы концевых мер, регулируемые скобы
(на столе преподавателя из расчета по 1 шт. на двух
студентов). Описания лабораторных работ по курсу
"Стандартизация, метрология и основы взаимозаменяемости"
(по 1 шт. на двоих студентов).
Содержание занятия:
1. Пояснения преподавателя:
- в форме беседы (опроса) со студентами напоминаются основные понятия
ЕСДП: номинальный, действительный, предельный размеры; отклонения,
допуск, квалитет; посадка, типы посадок, система отверстий и вала;
- на доске изображается схема одной из посадок (как пример)
с
обозначением на ней предельных отклонений, зазоров (натягов), допусков,
действительных размеров вала. Поясняется мотивация вывода о годности
вала;
- объясняются правила работы с микрометрами и способ контроля изделий
непосредственным измерением;
- показывается как настраивается регулируемый калибр и как с его помощью
контролируется изделие.
57
2. Практическое задание:
- изобразить два эскиза: валик со втулками в сборе и отдельно. Проставить
на них обозначения посадок и допусков (указаны на деталях);
- выписать в таблицу для каждого участка вала и соответствующих втулок
следующие значения: номинальный размер, предельные отклонения;
- вычертить схемы посадок. Указать на них: номинальный размер,
предельные отклонения вала и отверстия, предельные зазоры (натяги);
- микрометром сделать по пять измерений диаметров каждого участка
валика. Результаты записать в таблицу и показать звездочкой (*) на схемах
посадок. Найти средние действительные значения диаметров и показать их
на схемах;
- сделать вывод о годности валиков;
- настроить регулируемый калибр (скобу) на заданный допуск вала.
Продемонстрировать преподавателю процесс контроля вала. Зарисовать
эскиз скобы с указанием размеров проходного и непроходного участков.
Сделать вывод о годности вала.
Примечание: по желанию преподавателя студентам выдается один
валик на двоих или каждому задается свой участок.
Методические рекомендации
В работе используются два способа контроля правильности
изготовления одного и того же изделия (вала). Первый способ заключается в
проведении непосредственного измерения диаметра вала, а второй способ
используется для массового контроля партии валов с помощью
регулируемого калибра. При правильном проведении работы выводы по
обоим способам контроля должны приводить к одному результату, так как
контролируется диаметр одного и того же вала.
Н7
Пример схемы посадки с зазором Ф60
с указанием требуемых
g6
параметров показан на рис. 8.1
Занятие № 9
СТАТИСТИЧЕСКИЙ МЕТОД КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО
ПРОЦЕССА
Цель занятия: изучение простейших понятий математической статистики
и приобретение практических навыков по статистической
обработке экспериментальных данных.
Методическое обеспечение: партии валиков, микрометры, приспособления
для закрепления микрометров, описания лабораторных работ
по курсу "Стандартизация, метрология и основы
взаимозаменяемости" (по 1 шт. на двоих студентов).
58
dном = Dmin = 60 мм
ei
Dmax = 60,030 мм
-29
g6
dmax = 59,990 мм
-10
Td = 19мкм
Н7
TD = 30мкм
Smin
Smax
+30
dmin = 59,971 мм
Sдейств
+
0
–
dср = 59,965 мм
Dср = 60,015 мм
мкм
ES
EI
es
Рис. 8.1. Пример схемы посадки (брак неисправим)
59
Содержание занятия:
1. Пояснения преподавателя:
- обсуждаются причины, определяющие случайный характер значений
диаметров валиков, полученных в результате их автоматической обработки;
- напоминается характер нормального распределения случайных величин и
указываются два основных параметра (среднее и среднеквадратическое
отклонение) этого распределения.
2. Практическое задание:
- выписать значения номинального размера и отклонений для диаметра
валика (указаны на коробке);
- вычислить предельные (dmax, dmin) и средний (dm) размеры, допуск диаметра
(IT);
- замерить диаметры партии валиков, результаты измерений записать в
таблицу;
- вычислить значение размаха действительных размеров вала и определить
величину и количество интервалов диаметров (не менее 8 интервалов);
- составить вариационную таблицу для статистической обработки
результатов измерений ;
- вычислить значения выборочного среднего
выборочного
d и
среднеквадратического отклонения S;
- построить друг под другом гистограмму, полигон, функцию распределения
и поле допуска. Указать значения выборочного среднего d и середину поля
допуска dm ;
- определить поле рассеяния (6S) и смещение центра настройки (е = d - dm).
Показать их на гистограмме. Вычислить коэффициенты точности Тп и
смещения Е, фактический и возможный браки;
- сделать вывод о необходимости перенастройки технологического
процесса (смешение центра в какую-либо сторону, увеличение или
уменьшение точности).
Методические рекомендации
Первоначальные результаты измерений записываются в табл. 9.1
Таблица 9.1
Результаты измерений
Номер
измерения
i
1
2
…
N
Диаметр валика
di , мм
Форма вариационной таблицы представлена в табл. 9.2
60
Таблица 9.2
Вариационная таблица
Номер
интерва
ла
Интервал
действительных
размеров,
мм
j
Среднее
значение
интервала
Частота
d j , мм
nj
Частость
nj
N
N
1
1
-
1
2
…
k
Сумма
Накопленная
частость
j n
j
j 1
Вспомогательные параметры
n j· d j
d j2
nj ·d j2
-
Выборочные значения среднего d и среднеквадратичного отклонения S
вычисляется по следующим формулам:
d
1 k
n d
N j 1 j j
;
S
1 k
2
n j d j2 d
N j 1
.
Коэффициенты точности Тп и смещения E вычисляются по следующим
формулам:
Т п IT / 6S ;
E (d d m ) / IT .
Фактический брак определяется как процентное отношение деталей,
размеры которых не попали в поле допуска.
Возможный брак q можно определить двумя путями:
1) через вычисленные значения коэффициентов точности и смещения по
табл. 9.3;
2) через функцию нормального распределения F как вероятность того, что
размеры детали, закон распределения которых подчиняется нормальному
d и среднеквадратическим
и характеризуется средним значением
отклонением S, не попадут в поле допуска. При этом используется
формула
d
d
q 1 F max
S
d
d
F min
S
,
где dmax , dmin – максимальный и минимальный диаметры валов в
соответствии с полем допуска.
На рис. 9.1 представлены полигон, гистограмма, функция
распределения и поле допуска, которые должны иллюстрировать
61
nj
N
0,3
0,2
0,35
0,2
8
0,15
0,10
0,07
7
0,1
0,05
а
8,00 8,01 8,02 8,03 8,04 8,05
nj
d, мм
мм мм
ььмм
N
0,3
0,2
0,1
б
8,00 8,01 8,02 8,03 8,04 8,05
d, мм
F(d)
1,0
0,5
0
в
8,00 8,01 8,02 8,03 8,04 8,05
d, мм
IT
г
8,00 8,01
8,023
8,03 8,04 8,05
d, мм
е
d
dm
Рис. 9.1. Полигон (а), гистограмма (б), функция распределения (в)
и поле допуска (г)
62
эмпирическое распределение размеров валиков и их сравнения с полем
допуска.
Таблица 9.3.
Определение возможного брака по коэффициентам точности Тп и
смещение Е
Коэффицие
нт точности
Тп
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
Возможный брак q () при коэффициенте смещения Е
0
35,8
23,0
13,4
7,19
3,57
1,64
0,69
0,27
0,10
0,03
0,01
0,05
37,0
23,4
13,8
7,65
3,98
1,95
0,90
0,40
0,16
0,06
0,02
0,1
37,6
24,3
15,1
9,03
5,24
2,94
1,60
0,84
0,41
0,20
0,10
0,2
39,8
28,2
20,2
14,6
10,5
7,53
5,27
3,59
2,39
1,54
0,96
0,3
43,4
34,3
28,2
23,9
20,1
16,8
14,1
11,5
9,34
7,49
5,94
0,4
48,1
42,1
38,5
36,0
33,7
31,6
29,5
27,4
25,5
23,6
21,7
0,5
53,6
50,8
50,1
50,1
50,0
50,0
50,0
50,0
50,0
50,0
50,0
Занятие № 10
РАЗМЕРНЫЕ ЦЕПИ
Цель занятия: изучение понятий и практическое освоение методов расчета
линейных размерных цепей.
Методическое обеспечение: чертежи Д17, Д26, Д54 и МУ "Валы,
подшипники, муфты. Допуски и посадки" с выпиской из
ГОСТ 25347-82 по допускам и посадкам (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- на примере простейшей размерной цепи (см. рис. 5.1 [6]) даются
определения следующих понятий: размерная цепь, замыкающее и
составляющее звенья, увеличивающие и уменьшающие звенья;
- поясняется отличие прямой и обратной задач при расчете размерных
цепей. Указывается на многовариантность решения задачи по определению
номинальных размеров и предельных отклонений составляющих размерную
цепь звеньев исходя из известных размеров и отклонений замыкающего
звена. Несмотря на сложность решения этой задачи,
показывается
возможность рационального определения формы и размеров элементов
конструкций в зависимости от предъявляемых требований, например,
минимального допуска замыкающего звена, обеспечение полной
взаимозаменяемости и др.
63
- выписываются на доске формулы для определения номинального ,
наибольшего нб и наименьшего нм значений замыкающего звена и его
допуска Т при известных номинальных значениях и допусках
составляющих звеньев
Δ А i A j ;
i
j
Δнб Аiнб A jнм ;
i
j
Δнм Aiнм A jнб ;
i
j
ΤΔ TAi TA j ,
i
j
где введены следующие обозначения: , – стрелки, показывающие
увеличивающие и уменьшающие звенья соответственно, нб, нм –
соответственно обозначения наибольших и наименьших значений, Т –
допуск.
2. Практическое задание:
- составить размерную цепь для узла (вал с расположенными на нем
деталями, закрепленный в корпусе), вычертив его эскиз и под ним
размерную цепь с обозначением всех звеньев;
- определить по чертежу и справочникам исходные данные (номинальные
значения и допуски) для составляющих размерную цепь звеньев;
- вычислить параметры замыкающего звена (регулировочных прокладок,
компенсирующих колец);
- проанализировать полученные результаты. Указать окончательные
размеры и количество деталей, образующих замыкающее звено.
Таблица 10.1
Исходные данные
№
пп
1
2
Характеристика
Номер чертежа
Узел вала
3
Замыкающее звено
4
Предельные
отклонения ширины
подшипников, мкм
Квалитет предельных отклонений составляющих звеньев
*)
5
Варианты
4
5
6
7
Д17
Д26
Д54
Быстро- Тихохо- Быстро- Промежу- Тихохо- Быстро- Тихохоходного дного ходного точного
дного ходного дного
Набор прокладок
Компенсирующее
Набор прокладок
кольцо
0
0
0
0
0
0
0
-400
-500
-120
-150
-200
-200
-300
1
2
14
3
17
12
*) Предельные отклонения размеров для отдельных деталей: валов -IT,
отверстий +IT, остальных IT/2.
64
Методические рекомендации
Характерными узлами (сборочными единицами) машин являются валы
с закрепленными на них деталями (колесами, шестернями, полумуфтами,
втулками и т.д.) и подшипниками. Сначала эти узлы собираются вне корпуса,
а потом уже вставляются и закрепляются в корпусе. Причем для нормальной
работы машины закрепление валов должно проводиться таким образом,
чтобы, с одной стороны, не было недопустимо больших зазоров (люфтов) в
кинематических парах, а, с другой стороны, не создавались дополнительные
нагрузки, вызванные большими натягами, перекосами, защемлениями.
Например, чтобы вал с деталями был закреплен в осевом направлении в
корпусе без люфтов и защемлений в подшипниках, при монтаже нужно
всегда обеспечить нулевой зазор между крышкой подшипника и наружным
концом подшипника независимо от конкретных действительных размеров
каждой детали, которые, как известно, должны находиться в пределах
допусков. Это можно сделать только введя в линейную размерную цепь
компенсирующее звено (замыкающее звено), которое должно иметь
возможность изменять свои размеры в пределах расчетного допуска на
замыкающее звено.
В качестве компенсирующих звеньев могут использоваться:
– комплект регулировочных прокладок;
– компенсирующие кольца;
– резьбовые соединения с плавной регулировкой осевого положения
деталей.
Для определения размеров замыкающего звена необходимо решить
прямую задачу расчета размерной цепи. Определение размеров и допусков
составляющих размерную цепь звеньев при заданных размерах и допуске
замыкающего звена называется обратной задачей при расчете размерных
цепей. В работе необходимо найти решение прямой задачи.
Следует обратить внимание на назначение окончательных размеров и
допусков на детали, которые составляют замыкающее звено, так как они
должны обеспечить регулировку во всем диапазоне допуска на замыкающее
звено. Например, расчетом получен следующий размер замыкающего звена
200
111,,800
. Ни прокладками, ни компенсирующим кольцом регулировку в
требуемом диапазоне осуществить нельзя, так как минимальный размер
замыкающего звена получается отрицательным. Необходимо, например,
увеличить номинальное значение какого-либо увеличивающего звена на 1
мм, тогда номинальное значение замыкающего звена увеличиться также на 1
мм. И окончательно, например, для компенсирующего кольца необходимо
назначить размер 3,3h9.
65
Занятие № 11
ПРИНЦИПЫ НАЗНАЧЕНИЯ ДОПУСКОВ И ПОСАДОК
Цель занятия: изучение факторов, влияющих на выбор типа посадок.
Приобретение практических навыков назначения посадок на
сопряжения деталей в машинах.
Методическое обеспечение:
чертежи Д26, Д31, Д36; методические
указания "Валы, подшипники, муфты. Допуски и посадки",
«Подшипники качения» (по 1шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- объясняется роль основных факторов (степень подвижности, требование
центровки, монтажа, точности изготовления), оказывающих влияние на
выбор типа посадок в сопряжениях деталей машин;
- разбираются преимущества и недостатки систем отверстия и вала;
- комментируется целесообразность использования предпочтительных полей
допусков и рекомендуемых посадок;
- на примере схемы одной из посадок напоминаются основные понятия
единой системы допусков и посадок (ЕСДП).
2. Практическое задание:
- назначить посадки на следующие сопряжения:
1) тихоходный вал - зубчатое колесо;
2) крышка подшипника - корпус;
3) внутреннее кольцо подшипника - вал;
4) наружное кольцо подшипника - корпус;
- обосновать выбор посадок;
- вычертить схемы посадок. Обозначить на них: номинальный размер,
предельные отклонения, допуски вала и отверстия, предельные зазоры
(натяги).
Методические рекомендации
На выбор типа посадки влияют следующие основные факторы:
– необходимость обеспечения взаимной подвижности или неподвижности
сопряженных деталей;
– наличие требований по центровке деталей;
– требования по простоте монтажных операций;
– требования к точности изготовления деталей;
– технологические возможности изготовления деталей.
При сопряжении двух конкретных деталей (вала и отверстия) одного
номинального размера можно обеспечить либо зазор, либо натяг.
Посадка с зазором характеризуется обеспечением подвижности
сопряженных деталей, простотой монтажа, но плохой центровкой. При
посадке с натягом детали неподвижны друг относительно друга,
обеспечивается хорошая центровка, но затруднены монтажные операции. В
зависимости от предъявленных к проектируемому сопряжению требований
66
выбирается тот или иной тип посадки. Если требования по подвижности
сопряжения, по монтажу и центровке не противоречат друг другу, то
выбирается посадка с зазором или натягом. В практике же, как правило,
возникают противоречивые требования к сопряжению по этим трем
основным факторам.
Например, для закрепления вала относительно корпуса в сопряжении
цапфы вала со вкладышем нужно обеспечить подвижность сопряжения,
чтобы вал мог вращаться, а, с другой стороны, должна быть хорошая
центровка, чтобы вал был зафиксирован в радиальном направлении.
Хорошую центровку обеспечивает посадка с натягом, что противоречит
требованию по подвижности сопряжения. Поэтому, для такого случая
преобладающим фактором является подвижность сопряжения, и выбирается
посадка с зазором. А требования по центровке обеспечиваются выбором
величины зазора, который может обеспечить удовлетворительную работу
подшипника скольжения с одновременной удовлетворительной радиальной
фиксацией вала относительно корпуса.
Другой пример. Зубчатое колесо при посадке на вал, с одной стороны,
должно иметь хорошую центровку для нормальной работы зацепления, а, с
другой стороны, необходимо обеспечить достаточно простой монтаждемонтаж. Компромисс заключается в выборе посадки с небольшим натягом.
Или можно выбрать посадку переходную или даже центрирующую (типа Н–
h, с минимальным зазором, равным нулю), если существуют жесткие
требования по монтажу (например, возможна только сборка вручную без
применения запрессовки).
Поля допусков подшипников качения идут в минус от линии
номинального размера. Тип посадки колец подшипников выбирается в
зависимости от типа действующей нагрузки. Если кольцо подшипника
вращается относительно вектора реакции в опоре (циркуляционная нагрузка),
то назначается посадка с натягом. При местном нагружении (вектор нагрузки
не вращается относительно кольца подшипника) назначается посадка с
зазором.
Обычной точности изготовления деталей соответствуют квалитеты 6,7,8.
Причем, как правило, квалитет отверстия выбирается грубее, чем квалитет
вала, так как вал легче обрабатывать. Для подшипников качения в обычных
условиях применяется нормальный класс точности – 0 (нулевой).
Посадки могут назначаться в двух системах: системе отверстий и системе
вала. Характерными признаками посадки в системе отверстий является
наличие поля допуска основного отверстия (обозначается – Н). Для системы
вала обязательно используется поле допуска основного вала (обозначается –
h). Преимущественное применение получила система отверстий, так как валы
с любым отклонением от номинального размера технологически легче
изготовить, чем отверстия. Система вала используется в следующих случаях:
– вал по всей длине имеет один диаметр и его выгоднее изготовить с одним
допуском (обозначение – h);
– вал получают протяжкой (например, очень тонкий вал, типа проволоки) и в
дальнейшем не обрабатывают;
67
– поверхности типа «вал» стандартных
подшипников, ширина шпонки).
деталей
(наружные
кольца
Занятие № 12
КОНСТРУИРОВАНИЕ ПОДШИПНИКОВЫХ УЗЛОВ
Цель занятия: изучение конструкций подшипниковых узлов.
Методическое обеспечение: установки "Подшипники качения" (по 5 шт.
на подгруппу), чертежи Д18, Д20, Д22, Д26, Д125, МУ
"Валы, подшипники, муфты. Допуски и посадки" (по 1шт.
на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается назначение подшипников, типы подшипников, схемы
установки подшипников, режимы работы подшипников скольжения;
- обсуждаются и изучаются по чертежам основные элементы
подшипниковых узлов: собственно конструкции подшипников, уплотнения,
смазка, регулировка.
2. Практическое задание:
- используя учебные установки "Подшипники качения", собрать заданную
схему, соответствующую своим исходным данным (выполняется студентами
попарно); правильность сборки проверить у преподавателя;
- зарисовать эскиз полученной конструкции с обозначением основных
элементов, указать их функциональное назначение (показать только
подшипниковые узлы, вал "разорвать", корпус показать условно);
- для заданной схемы сконструировать подшипники скольжения;
изобразить эскиз вала с подшипниками скольжения.
- назначить посадки: вкладыш – корпус; вкладыш – вал. Обосновать их
выбор. Изобразить схемы посадок. Показать предельные зазоры (натяги).
Таблица 12.1
Исходные данные
№
пп
1
2
68
Характеристика
Варианты
1
2
3
4
Схема установки "Враспор" "Врастяжку" Фиксирую- Плавающие
щая
и опоры
плавающая
опоры
Тип подшипников Шариковые Шариковые Роликовые
––
радиальные сферические конические
Методические рекомендации
Различают четыре «классические» схемы установки валов в опорах
(схемы установки подшипников): «враспор», «врастяжку», с фиксирующей и
плавающей опорами, с двумя плавающими опорами (рис. 12.1). Так как
опоры предназначены для закрепления валов (осей) относительно корпуса с
обеспечением, как правило, одной степени свободы возможности вращения,
то, следовательно, подшипники должны закреплять валы в радиальном и
осевом направлениях. Для того, чтобы подшипники обеспечивали фиксацию
вала в радиальном направлении, в конструкции подшипникового узла между
валом и корпусом должны быть минимальные радиальные зазоры. Для
подшипников качения внутренний диаметр внутреннего кольца совпадает с
диаметром вала, а наружный диаметр наружного кольца – с диаметром
отверстия в корпусе. В подшипниках скольжения между вкладышем
подшипника и валом назначается посадка с зазором, обеспечивающая
требуемый режим трения (полужидкостное, жидкостное).
Схемы установки подшипников отличаются способом фиксации вала в
осевом направлении. При установке подшипников «враспор» или
«врастяжку» каждый из подшипников фиксирует вал только в одном осевом
направлении (слева направо или наоборот). Причем при схеме «враспор» вал
упирается в подшипники с внутренней стороны, а с наружной стороны
подшипники упираются в корпусные детали. Для схем «врастяжку» осевая
нагрузка со стороны вала воспринимается наружным торцевыми
поверхностями подшипников и передается на корпус через внутренние
торцевые поверхности. В схеме с фиксирующей и плавающей опорами в
фиксирующей опоре обеспечивается закрепление вала в обоих осевых
направлениях. Для этого вал должен с двух сторон закрепляться
относительно подшипника в этой опоре, и подшипник также должен с двух
сторон закрепляться в корпусе. В плавающей опоре подшипник относительно
вала закрепляется с двух сторон, а относительно корпуса вообще не
закрепляется в осевом направлении (за исключением конического
радиального подшипника, наружное кольцо которого закрепляется в корпусе
с двух сторон, а свобода осевого перемещения вала обеспечивается взаимной
подвижностью колец подшипников).
Две плавающие опоры используются для валов, которые закреплены в
осевом направлении не с помощью подшипников. Например, в шевронных
передачах один из валов устанавливают на плавающих опорах. При этом он
не перемещается в осевом направлении за счет конструкции шевронного
зацепления. Случайные осевые нагрузки, возникающие на этом валу,
воспринимаются подшипниками другого вала.
69
70
Занятие № 13
КОНСТРУИРОВАНИЕ КОРПУСНЫХ ЭЛЕМЕНТОВ
Цель занятия: изучение общих рекомендаций и получение практических
навыков по конструированию корпусных элементов.
Методическое обеспечение: натурный двухступенчатый редуктор (в
аудитории), чертежи Д31, Д36, Д26, МУ к КП Сазонова Ю.И.
и "Соединения" (по 1 шт. на двоих).
Содержание занятия:
1. Пояснения преподавателя:
- на примере натурного редуктора напоминаются названия и назначение
основных корпусных элементов (крышка, основание; стенки, фланцы,
опорные лапы, бобышки под подшипники, платики, крышки подшипников,
ребра жесткости, смотровой люк; проушины, крючья, рым-болты,
соединительные винты, болты, фиксирующие штифты, отверстия под них);
- кратко обсуждаются основные технологические способы получения
корпусных деталей (сварка, литье, штамповка), их сравнительные
характеристики (в каких случаях применяются,
преимущества
и
недостатки), возможные материалы (сталь, чугун, бронза, алюминиевые
сплавы, пластмассы, композиты);
- обращается внимание на общие правила и технологические особенности
конструирования литых и сварных корпусных деталей (с одной стороны,
требования прочности, жесткости, долговечности, точности изготовления, с
другой стороны, технологические требования к форме литых деталей,
коробление, необходимость отжига сварных деталей);
- комментируется табл. 4.1 из МУ к КП Сазонова Ю.И. по определению
параметров основных элементов корпуса.
2. Практическое задание:
- определить следующие основные размеры фланцевого разъема литого
корпуса одноступенчатого редуктора в области подшипника тихоходного
вала:
= толщины стенок корпуса и крышки редуктора;
= зазор безопасности;
= диаметр соединительных болтов;
= размеры, определяющие положение двух болтов у подшипника
тихоходного вала;
= высоту бобышки под болт;
= ширину фланца;
= количество, взаимное расположение и размер винтов крепления
крышки подшипника;
= диаметр бобышки под подшипник.
71
Таблица 13.1
Исходные данные
№ Характеристика
пп
1
1 Межосевое
25
расстояние аw, мм
2 Коэффициент
0,6
ширины ba
3 Крутящий момент
на тихоходном валу
2
Т2, Н·м
Пласт3 Материал корпуса
2
40
Варианты
3
4
5
100
125
160
6
180
7
200
0,5
0,4
0,315
0,25
0,2
0,25
8
125
230
500
700
1000
Бронза Чугун
масса
4
5
Материал болтов:
сталь
Передаточное число
Силумин
Сталь Чугун Силумин
Ст.3
20
35
40
45
50
35Х
2
2,5
3
3,5
4
4,5
5
- вычертить эскиз фланцевого разъема редуктора в масштабе в двух
проекциях. Проставить на нем обозначения всех ранее определенных
размеров;
- определить нагрузку, действующую перпендикулярно плоскости стыка от
сил в зацеплении на болты, соединяющие крышку и основание корпуса у
подшипников;
- проверить прочность болтов, считая, что сила предварительной затяжки
(при неработающем редукторе) равняется силе, действующей со стороны
зацепления.
Методические рекомендации
1. Минимальная толщина стенок деталей для различных литейных
материалов принимается по табл. 13.2 в зависимости от приведенного
габаритного размера N = max{L; B; H} для пластмасс и
N = (2L+B+H)/3 для других материалов, где L,B, H - соответственно длина,
ширина и высота отливки.
Таблица 13.2
Значение толщины стенок корпуса
Толщина (мм) стенок в зависимости от размера N(м)
0,02 0,05 0,15 0,3 0,5 0,7 1,0
1,5
2,0
3,0
Сталь
5
6
7,5
9
10
12
15
17
25
Чугун
4
5
6
7
8
10
12
15
20
Бронза
3
4
5
6
Сплавы AL 2,5
3
4
5
6
7
8
10
Пластмасса 1-2 2-3,5 3-6 4-9 6-11 Материал
72
2. При несоответствии материала корпуса габаритному параметру
студент по согласованию с преподавателем обоснованно изменяет материал.
3. Диаметр вала под подшипник dп определяется по моменту Т2 на
валу из расчета на кручение по следующему соотношению
dп 3
16 Т 2
,
π τ кр
где кр = 15...25 МПа – допускаемые напряжения на кручение. Диаметр
вала dп под подшипник округляется до стандартного. Наружный диаметр
подшипника берется по справочнику или оценивается по формуле D = 2dп .
4. При определении силы, действующей со стороны зацепления на
болты, считается, что реакция, перпендикулярная плоскости
стыка,
воспринимается
двумя
болтами,
симметрично
расположенными
относительно оси вала. Фланец остается абсолютно жестким.
Занятие № 14
ПРОЕКТИРОВАНИЕ ВАЛОВ
Цель занятия: изучение методик конструирования валов.
Методическое обеспечение: чертежи Д138, МУ и КП Сазонова Ю.И. и
"Валы, подшипники, муфты. Допуски и посадки" (по 1 шт. на
двоих).
Содержание занятия:
1. Пояснения преподавателя:
- напоминается функциональное назначение валов. По чертежу Д138
сравниваются возможные конструкции ступенчатого и гладкого валов.
Обсуждаются достоинства и недостатки этих вариантов;
- напоминается последовательность конструирования вала (определение
диаметральных размеров и форм основных участков вала, определение
линейных размеров вала).
2. Практическое задание:
- определить диаметральные и линейные размеры тихоходного вала
одноступенчатого редуктора;
- вычертить эскиз вала. Указать на нем ранее определенные параметры.
Примечание: исходные данные взять из занятия № 13.
Методические рекомендации
В большинстве случаев вал конструируют ступенчатой формы.
Наличие ступенек (участков) обеспечивает надежную фиксацию насаженных
на вал деталей в осевом направлении, упрощает монтаж, а также облегчает
выполнение требований по шероховатости, допускам, которые для каждой
поверхности могут быть разными.
73
Диаметральные размеры каждого участка выполняются с учетом
обеспечения монтажных операций и согласовываются
с размерами
насаживаемых на эти участки деталей. Например, если правый подшипник
насаживается на вал с правой стороны (рис. 14.1), то увеличение диаметров
должно идти справа налево.
Из рисунка видно, что диаметр каждого последующего участка di+1
определяется по диаметру, предыдущего di c учетом высоты буртика t , т.е.
d2 = d1 + 2t.
Причем высота буртика должна быть больше, чем размер фаски f или
радиус скругления r детали, которая упирается в этот буртик. Например,
высота буртика t1 должна быть больше, чем размер фаски f у полумуфты,
насаженной на выходной конец вала. Соответственно для подшипника
должно выполняться условие t2 r.
Линейные размеры участков можно определить конструктивно из
эскизной компоновки. Например, длина участка l2 в месте посадки
подшипника определяется, с одной стороны, с учетом размеров деталей,
насаживаемых на вал, а, с другой стороны, учитываются размеры корпусных
деталей (толщина стенки
, ширина фланца К, толщина крышки
подшипника кр) и зазоры безопасности a.
Занятие № 15
УПРОЩЕННАЯ ЭСКИЗНАЯ КОМПОНОВКА
Цель занятия: приобретение навыков вычерчивания упрощенных эскизных
проектов.
Методическое обеспечение: методические указания к КП Сазонова Ю.И. (по
1 шт. на двоих).
Содержание занятия:
1.
Пояснения преподавателя:
- поясняются цели упрощенной эскизной компоновки:
определение конкретного взаимного расположения деталей;
определение наиболее важных (основных) размеров и форм деталей;
получение приближенных значений некоторых главных параметров,
определяющих качество объекта проектирования (масса, габариты,
стоимость, металлоемкость и др.).
- перечисляются и комментируются правила выполнения упрощенной
эскизной компоновки:
идти от общего к частному, уделять внимание выбору рациональных
конструктивных и силовых схем, упуская подробности;
необходимо разрабатывать несколько вариантов компоновки изделия;
эскиз выполнять без излишних подробностей (валы - постоянного
диаметра; подшипники изображаются условно; болтовые, шпоночные и
74
75
другие соединения не вычерчиваются, а только обозначается место их
расположения; не показываются точные формы деталей (литьевые
уклоны, радиусы округлений и т.д.).
- отмечается трудность выполнения этого этапа, связанная с тем, что
проектирование не является последовательным процессом, а связано с
непрерывными итерациями, уточнениями конструктивных решений;
- напоминается, что, как правило, техника компоновки состоит в выполнении
эскизного проекта в масштабе 1:1 на миллиметровке.
2. Практическое задание:
- вычертить упрощенный эскизный чертеж одноступенчатого зубчатого
цилиндрического редуктора (в трех проекциях);
- проставить на нем обозначения основных геометрических параметров
элементов редуктора (колес, валов, подшипников, корпуса), для каждого из
которых указать способ (критерий) их определения.
Таблица 15.1
Исходные данные
№
пп
1.
2.
Наименование
Геометрические
размеры колес,
валов,
подшипников,
корпуса
Расположение
плоскости валов в
пространстве
Варианты
1
2
Из лабораторнопрактических
занятий
№ 13,14
3
4
Из курсовой
работы
Горизонтальное
Вертикальное
Под углом
450
По верхней
крышке корпуса
По
боковой
стенке
3.
Расположение
плоскости разъема
корпуса
По
плоскости
валов
4.
Расположение
плоскости
опорных лап
фланца
Горизонтальное
у днища
Горизонтальное
у крышки
Вертикальное по
боковой
стенке
Вертикально к фланцу двигателя
Примечание: при наличии у студентов необходимых исходных данных по
размерам передач, валов, подшипников и корпуса для индивидуального
задания по курсовой работе, практическое задание состоит в выполнении
упрощенного эскизного проекта для одного из вариантов структуры
редуктора из курсовой работы.
76
Методические рекомендации
На рис. 15.1 показаны этапы упрощенной эскизной компоновки
одноступенчатого
цилиндрического
редуктора
с
вертикальным
расположением валов. На первом этапе по результатам проектирования
передачи изображается эскиз ступени (рис. 15.1, а). Затем определяются
диаметры валов (dвБ – быстроходного, dвт – тихоходного), по ним находят
размеры подшипников, в том числе наружные диаметры (DПБ – для
быстроходного и DПТ – тихоходного валов), которые равны размерам
отверстий под подшипники в корпусе.
После определения зазора безопасности а находятся контуры
внутренней поверхности корпуса (рис. 15.1, б). С учетом толщины стенки
корпуса , ширины К и толщины В1, В фланцев, размеров бобышек под
подшипник DБ, Dт прочерчиваются наружные контуры корпуса
(рис.15.1, в).
Занятие № 16
УТОЧНЕННАЯ ЭСКИЗНАЯ КОМПОНОВКА
Цель занятия: изучение особенностей компонования на стадиях технического
и рабочего проектирования.
Методическое обеспечение: методические указания к курсовому проекту
Сазонова Ю.И. (по 1 шт. на двоих).
Содержание занятия:
1.
Пояснения преподавателя:
- поясняются основные цели уточненной компоновки:
на основе упрощенного эскизного чертежа
уточняются все
геометрические параметры деталей (номинальные размеры и допуски).
Причем, некоторые размеры определяются расчетом или из опытных
данных, а часть размеров может быть получена прочерчиванием;
уточняются технологические процессы получения деталей и их заготовок;
уточняются материалы, их термообработка;
проводятся все возможные проверочные расчеты, позволяющие
гарантировать требуемую работоспособность объекта проектирования;
выполняется технический чертеж общего вида, дающий информацию о
формах и размерах всех деталей изделия и позволяющий выполнить
рабочие чертежи деталей.
2. Практическое задание:
- вычертить чертеж узла редуктора на миллиметровке в масштабе 1:1.
Поставить на нем необходимые размеры с посадками.
Примечание: в качестве узла рекомендуется взять один из валов редуктора с
закрепленными на нем колеса и подшипники в корпусе. Исходные данные
берутся из предыдущего занятия или из курсовой работы.
77
в1
dа1
dа2
в2
а
а
d вТ
а
а
а
а
DПТ
d вБ
DПБ
а
а
а
а
б
аw
а
к
DбБ
Dбт
к
В1
В
в
Рис. 15.1 Этапы упрощенной эскизной компоновки одноступенчатого вертикального
цилиндрического редуктора:
а– эскиз передачи; б – определение внутренних очертаний корпуса, диаметров валов и
размеров подшипников; в – определение наружных поверхностей корпуса, размеров
фланцев и бобышек подшипников
78
Методические рекомендации
На рис. 16.1 показан чертеж узла, выполненный после уточнения
конструкции и размеров всех его элементов. Здесь же проставлены
характерные посадки для всех наиболее ответственных сопряжений, а также
присоединительные размеры. На этапе уточненного эскизного проекта
должны быть определены окончательные формы и размеры всех деталей.
Обеспечивается выполнение требуемых условий сборки, разборки,
регулировки, технологии изготовления.
КОНТРОЛЬНЫЕ ВОПРОСЫ
4 семестр
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
7.
Занятие 2
Сформулируйте цели структурного и кинематического анализа
механизмов.
Что называется структурной схемой механизма?
Дайте понятие кинематического звена, кинематической пары.
Чем определяется число степеней свободы механизма?
В чем состоит отличие кинематической схемы от структурной?
Что такое передаточное отношение?
Запишите выражение для передаточной функции при преобразовании
вращательного движения во вращательное и вращательного – в
поступательное.
Занятие 3
Сравните методы огибания и копирования, используемые для нарезания
зубчатых колес.
В каких случаях зубчатые колеса нарезаются со смещением инструмента?
Что такое модуль зубчатого колеса?
Размер какого элемента колеса определяется модулем?
Запишите формулу для определения делительного диаметра колеса.
В чем состоит отличие передаточного числа от передаточного отношения?
Что показывает значение коэффициента торцового перекрытия?
Занятие 4
Какое функциональное назначение имеют зубчатые передачи?
Чем отличаются режимы редуцирования и мультипликации?
Чем отличается шестерня от зубчатого колеса?
Что такое ведущее и ведомое звено?
Какое направление имеет крутящий момент на шестерне и колесе?
Почему?
Какие составляющие сил в зацеплении рассматриваются в зубчатой
цилиндрической передаче?
Какие правила используются для определения направления сил в
зацеплении?
79
80
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
Занятие 5
Какое условие является критерием проектировочного расчета зубчатых
цилиндрических и конических передач?
Какой основной расчетный параметр определяет размеры зубчатой
цилиндрической передачи?
Из какого условия прочности определяется модуль передачи?
Какие условия прочности должны выполняться в зубчатой передаче?
От чего зависят значения допускаемых контактных напряжений?
В чем смысл коэффициента долговечности? В каких случаях его значение
может быть больше единицы?
Какие основные виды повреждений наблюдаются в зубчатых передачах?
Занятие 6
Какие преимущества и недостатки имеет червячная передача по
сравнению с зубчатой цилиндрической?
Из какого условия определяется межосевое расстояние?
Какие материалы используются для венца червячной передачи? Какой
параметр влияет на выбор материала?
Какой параметр определяет нагрузочную способность червячной
передачи?
В чем заключается эффект самоторможения?
Изобразите силы в зацеплении червячной передачи.
Как влияет число заходов червяка на экономичность червячной пары?
Занятие 7
Какие условия собираемости должны выполняться в планетарной
передаче? Запишите их.
Почему размеры планетарной передачи получаются меньше, чем размеры
однопоточной цилиндрической передачи при прочих равных условиях?
Для чего применяются плавающие звенья в планетарной передаче?
Каким условием определяется предельно допускаемое число сателлитов?
Какие силовые факторы действуют на ось сателлита?
Как экспериментально определить передаточное число редуктора?
Занятие 8
1. Какое условие является критерием проектирования планетарной
передачи?
2. Прочность какого зацепления (наружного или внутреннего) больше при
одинаковых материалах и равной ширине зубчатых колес? Почему?
3. При каком варианте чисел зубьев надежность планетарной передачи по
изгибной прочности будет наибольшей и почему?
Занятие 9
1. Сформулируйте назначение передачи винт-гайка.
2. Какие материалы используются в передаче винт-гайка?
3. Какие типы резьб используются в силовых передачах винт-гайка?
81
4. Какое условие определяет размеры винтовой передачи?
5. Перечислите условия работоспособности передачи винт-гайка.
6. Когда возможен эффект самоторможения?
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
7.
1.
2.
3.
4.
5.
6.
1.
2.
3.
4.
82
Занятие 10
Какой критерий расчета применяется для определения диаметральных
размеров вала?
Перечислите напряжения, действующие в сечениях валов.
Перечислите возможные источники концентрации напряжений в валах.
Какой характер имеют изменения во времени нормальных и касательных
напряжений?
Сформулируйте критерий проверочного расчета вала.
Изложите алгоритм проверочного расчета вала.
Что такое вероятность безотказной работы вала?
Занятие 11
В чем состоит функциональное назначение подшипников?
Перечислите основные типы подшипников качения?
Что такое динамическая кругоподъемность подшипника?
Что такое эквивалентная нагрузка подшипника?
Сформулируйте критерий расчета подшипника качения по динамической
грузоподъемности.
Какой подшипник способен воспринимать только осевые нагрузки?
Изложите алгоритм расчета подшипников качения.
Занятие 12
Какие преимущества и недостатки имеют подшипники скольжения?
В каких режимах могут работать подшипники скольжения? В чем состоит
их отличие?
Зачем нужен вкладыш?
Чем отличаются гидродинамический и гидростатический режимы
жидкостного трения?
Какие критерии расчета используются для режима полужидкостного
трения?
Сформулируйте критерий работоспособности подшипника для режима
жидкостного трения.
Занятие 13
В чем состоит назначение шпоночных и шлицевых соединений?
Как при проектировании определяются параметры шпоночного и
шлицевого соединений?
Какое из соединений (шпоночное или шлицевое) обладает большей
нагрузочной способностью при прочих равных условиях?
Сформулируйте условия прочности шпоночного и шлицевого соединений.
1.
2.
3.
4.
5.
1.
2.
3.
4.
5.
6.
Занятие 14
Перечислите основные типы резьбовых соединений. Сравните их между
собой.
За счет каких сил передается внешняя нагрузка в болтовом соединении с
зазором?
Какие напряжения испытывает болт в соединении с зазором?
Какие напряжения действуют в болте при его установке по посадке?
Укажите преимущества и недостатки болтового соединения при
постановке болта с зазором и по посадке.
Занятие 15
Какова основная функция муфт?
Перечислите возможные дополнительные функции, которые может
выполнять муфта.
Какие возможны виды несоосности валов? Какие муфты используются
для соединения несоосных валов?
Какие муфты используются при наличии динамических нагрузок?
Какие муфты используются для защиты от перегрузок?
Что такое управляемые муфты? Где они используются?
5 семестр
1.
2.
3.
4.
5.
6.
7.
Занятие 2
Что такое дисбаланс?
Назовите условие возникновения резонанса.
Чем опасно явление резонанса?
Какое условие должно быть обеспечено для статической балансировки
ротора?
Для каких деталей статическая балансировка является достаточным
условием для обеспечения полной уравновешенности?
Для каких деталей необходимо кроме статической балансировки
проводить динамическую балансировку?
Чем динамическая балансировка отличается от статической?
Занятие 3
1. Дайте определение кпд.
2. Как зависит кпд червячной передачи от числа заходов червяка? Почему?
3. Как зависит кпд червячной передачи от частоты вращения быстроходного
вала?
Занятие 4
1. Перечислите процедуры, рекомендуемые при уточнении технического
задания.
2. Что понимается под условиями, ограничениями, показателями качества?
Приведите примеры.
83
3. Для чего используется иерархическая структура объекта проектирования?
4. Дайте понятия надсистемы и подсистемы.
5. Для чего используется «дерево целей»?
Занятие 5
1. Какой параметр является определяющим для формирования множества
структур механических передач?
2. По каким условия и ограничениям может производится усечение
множества структур механических передач?
3. Как можно сравнить варианты решений при отсутствии численных
показателей качества?
Занятие 6
1. Что такое показатель качества?
2. Как можно оценить значение весовых коэффициентов для выбранных
показателей качества?
3. Что такое целевая функция? Когда она используется?
Занятие 7
1. Какие
высотные
параметры
используются
при
обозначении
шероховатости на чертежах?
2. Как изменяются параметры шероховатости с повышением класса
шероховатости?
3. Какую размерность имеют высотные параметры шероховатости?
Занятие 8
1. Дайте понятие номинального размера и предельных отклонений.
2. Что такое допуск?
3. Что обозначают термины «вал» и «отверстие» в единой системе допусков
и посадок (ЕСДП)?
4. Что такое квалитет? Как изменяется размер допуска с увеличением номера
квалитета?
5. Как обозначаются на чертежах и схемах допуски и посадки?
6. В чем отличие допуска от посадки?
7. Какие типы посадок различают в ЕСДП?
8. Чем отличается система вала от системы отверстия?
9. Что такое регулируемый калибр? Как называются калибры, используемые
для контроля размеров валов, отверстий?
10.Что подразумевается под годным изделием, исправимым или
неисправимым браком?
Занятие 9
1. Что такое случайное событие?
2. Чем определяется вероятность появления случайного события?
3. Что такое функция распределения случайной величины, функция
плотности распределения вероятностей?
84
4. Какими числовыми характеристиками определяется нормальный закон
распределения случайной величины?
5. Поясните правило «трех сигм».
6. Аналогом какой характеристики являются полигон и гистограмма?
7. Что такое частота, частость, накопленная частость при статистической
обработке экспериментальных данных?
8. Чем отличается возможный брак от фактического при статистическом
контроле размеров деталей?
1.
2.
3.
4.
5.
6.
Занятие 10
Дайте понятие размерной цепи. Из каких звеньев состоит размерная цепь?
Какие звенья называются «увеличивающими», «уменьшающими»?
Чем отличаются прямая и обратная задачи при расчете размерных цепей?
Какие детали могут использоваться в качестве компенсирующих звеньев
для обеспечивания требований взаимозаменяемости в линейных
размерных цепях?
Что такое сборочная и подетальная размерные цепи?
Какое из звеньев размерной цепи имеет наибольший допуск? Почему?
Занятие 11
1. Какие требования работоспособности сопряжения должны учитываться
при назначении типа посадки?
2. Какая посадка назначается для кольца подшипника качения,
испытывающего циркуляционную нагрузку?
3. Какая посадка назначается для кольца подшипника качения,
испытывающего местную нагрузку?
Занятие 12
1. Могут ли для схемы «враспор» или «врастяжку» использоваться
роликовые радиальные подшипники?
2. Можно ли в фиксирующей опоре использовать радиально-упорные
подшипники?
3. В каких случаях применяются две плавающие опоры?
1.
2.
3.
4.
5.
Занятие 13
Для чего нужны бобышки под подшипники?
Зачем нужны платики?
Для чего используются фиксирующие штифты?
Почему толщина стенки литого корпуса, как правило, ограничивается 68
мм?
Каким элементом определяется размер фланца для соединения крышки и
основания корпуса?
Занятие 14
1. Сравните конструкции ступенчатого и гладкого валов.
2. Как определяются линейные размеры участков ступенчатого вала?
85
Занятия 15, 16
1. Зачем нужна упрощенная компоновка конструкции?
2. Чем отличаются упрощенная и уточненная эскизные компоновки?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Учебники и учебные пособия
1. Иванов М.Н. Детали машин. М.: Высш. шк., 1998. 383 c.
2. Половинкин А.И. Основы инженерного творчества. М.:
Машиностроение, 1988.
3. Решетов Д.Н. Детали машин. М.: Машиностроение, 1989.
4. Орлов П.И. Основы конструирования. В 2 кн. М.: Машиностроение,
1988.
5. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей
машин. М.: Высш. шк., 1998. 447 с.
6. Основы взаимозаменяемости и стандартизации в машиностроении/
Д.А.Перемыщев, Ю.И.Сазонов, В.И.Чугунов и др. М.: Моск.энерг.ин-т, 1989.
7. Расчет размерных цепей/ Д.А.Перемыщев, Н.А.Аксенова,
И.А.Сердюкова и др М.: Издательство МЭИ, 1992.
8. Методические указания по курсу ОИП "Типовые решения в
проектировании привода"/Д.Д.Корж, М.: Издательство МЭИ, 1995.
9. Корж Д.Д., Хорошев А.Н. Этапы проектирования механического
привода. М.: Издательство МЭИ, 1997.
10. Корж Д.Д. Вероятностная оценка надежности деталей машин. М.:
Издательство МЭИ, 1995.
11. Потемкин И.C. Методы поиска технических решений. М.: Моск.
энерг.ин-т, 1989.
12. Хорошев А.Н. Системное проектирование машин. М.: Моск.
энерг.ин-т, 1989.
13. Джонс Дж.К. Методы проектирования. М.: Мир, 1986г.
14. Сборник примеров для самостоятельной работы по основам
конструирования машин/ Н.А. Аксенова, В.В. Баранов, С.Ф. Мороз и др. М.:
Издательство МЭИ, 1997г.
15. Машнев М.М., Красковский Е.Я., Лебедев П.А. Теория
механизмов и машин. Л.: Машиностроение, 1980. 512с.
Атласы
1. Зубчатые и червячные передачи. Атлас конструкций / Под ред. С.Ф.
Мороза. М.: Издательство МЭИ, 2000. 114с.
2. Детали машин: Атлас конструкций /Под ред. Д.Н.Решетова, М.:
Машиностроение, 1992.
86
3. Цехнович Л.И., Петриченко И.П. Атлас конструкций редукторов.
Киев. Выща шк. 1990. 151 с.
4. Учебное пособие «Механизмы вспомогательного оборудования в
энергетике. Атлас конструкций»/ Под ред. Д.А.Перемыщева, М.:
Издательство МЭИ, 1992. 70 с.
5. Атлас конструкций гидромашин и гидропередач /Б.М.Бим-Бад,
М.Г.Кабаков, В.Н.Прокофьев и др. М.: Машиностроение, 1990. 134 с.
6. Учебное пособие «Механизмы специализированных конструкций»/
Под ред. К.Н.Бокова., М.: Моск.энерг.ин-т, 1986.
7. Ершов В.И., Александров К.К. Учебное пособие «Атлас
механизмов ТЭС и АЭС». М.: Моск.энерг.ин-т, 1978.
8. Анфимов М.И. Редукторы. Конструкции и расчет: Альбом. М.:
Мащиностроение, 1972. 284 с.
9. Гончаренко Г.Т. Чтение и деталирование сборочных чертежей.
Альбом. М.: Машиностроение, 1967. 155 с.
10.Атлас сборочных чертежей оборудования заводов химической
промышленности. М.: Высш. шк. 1966. 75 л.
11.Атлас котельных агрегатов /Под общ. ред. А.П.Ковалева, М.:
Госэнергоиздат, 1958. 120 с.
12.Атлас электромеханических промышленных установок. Ч.1.
Электропривод и передаточные механизмы. Ч.2. Электрические печи. М.-Л.:
Госэнергоизда,. 1958.
13.Атлас деталей машин/ Б.П.Дашкевич, С.К.Дьяченко, О.З.Столбовой
и др. Киев, Гостехиздат, 1957. 232 с.
14.Иванов Е.А. Муфты приводов. Атлас конструкций. М.: Машгиз,
1957. 191 с.
15.Атлас деталей машин (Соединения и муфты)/ В.Л.Сахненко,
В.А.Максимович, А.В.Троицкий и др. Киев: Гостехиздат УССР, 1956. 147 с.
87
Учебное издание
Корж Дмитрий Дмитриевич
ПРАКТИКА ПРОЕКТИРОВАНИЯ
Руководство к лабораторно-практическим занятиям
Методическое пособие
по курсу
«Основы инженерного проектирования»
для студентов, обучающихся по направлению
«Энергомашиностроение»
Редактор издательства О.М.Горина
ЛР №020528 от 05.06.97
Темплан издания МЭИ, 2001 г. ( I ) , метод.
Формат 6084/16
Подписано в печать 13.02.01
Печать офсетная
Физ.печ. л. – 5,5
Тираж 300
Изд. № 165
Заказ
Издательство МЭИ, 111250, Москва, Краноказарменная ул., д.14
Отпечатано в типографии ЦНИИ «Электроника», 117417,
Москва, просп. Вернадского, д.39
88