КОРИОЛИСОВА СИЛА
реклама

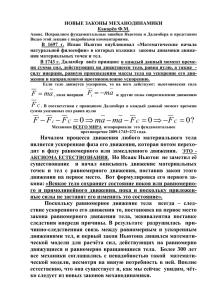
КОРИОЛИСОВО ЗАМЕДЛЕНИЕ Канарёв Ф.М. kanarevfm@mail.ru Анонс. Ошибочность первого закона Ньютона повлекла за собой необходимость серьёзной коррекции его динамики. Причина этой необходимости одна – нарушение принципа причинности при познании процессов механического движения материальных точек и тел, который игнорировался более 300 лет. Покажем это на примере использования новых законов механодинамики для анализа процесса появления кориолисовой силы инерции и кориолисова замедления. Вводная часть Специалистам по теоретической механике не рекомендуется спешить отрицать важность отмеченного, так как голословное отрицание новых научных результатов почти всегда – следствие мощного гнёта стереотипа старого научного мышления, который управляет научным поведением почти всех современников новых научных знаний. Это естественный процесс, эквивалентный процессу инстинктивного поведения, управляемого Природой. Ошибочность первого закона Ньютона – следствие нарушения им главного принципа научного познания сути природных явлений и процессов – принципа последовательности. Нарушение этого принципа почти автоматически ведёт к разрыву причинно следственных связей изучаемого явления или процесса. Нельзя начинать анализ какого-либо процесса или явления не найдя его начала. Исторически сложилось так, что развитие кинематики движения материальных точек и тел опережало развитие познания их динамики. В результате знания о скоростях и ускорениях движения материальных точек и тел появились раньше знаний о силах, генерирующих эти скорости и ускорения. Поскольку скорости и ускорения являются следствиями действия сил, то опережающее развитие знаний о скоростях и ускорениях автоматически должно было породить чехарду в отражении физической сути механических движений материальных точек и тел. Оказалось, что разобраться в этой чехарде – задача не простая. Её решение растянулось почти на 300 лет. Обратим особое внимание на то, что началом движения всех материальных точек и тел является ускоренное движение, а равномерное движение всегда, всегда, всегда – следствие ускоренного движения. Мы специально трижды повторили категорическое понятие всегда, чтобы подчеркнуть, что это - закон Природы. Из этого закона автоматически следует, что анализ и описание движения материальных точек и тел надо начинать с их ускоренного движения и закон этого движения должен быть первым законом механического движения материальных точек и тел. Из этого также следует давно созревшая необходимость заменить понятие «Динамика» на понятие «Механодинамика». Такая необходимость обусловлена уже давно используемыми родственными понятиями: «Электродинамика», «Гидродинамика», «Аэродинамика», «Термодинамика» содержащими слово динамика. Из этого следует необходимость назвать раздел теоретической механики, в котором изучается движение материальных точек и тел под действием сил, приложенных к ним, «Механодинамика». 1. Основной закон механодинамики Многовековой опыт использования второго закона Ньютона показал его безупречную достоверность, поэтому у нас есть основание назвать его основным законом механодинамики. 2 Согласно основному закону механодинамики сила F , действующая на материальное тело, движущееся с ускорением a , всегда равна массе m тела, умноженной на ускорение и совпадает с направлением ускорения (1) F m a . Чтобы отличать силу F , формирующую ускорение, от других сил, назовём её ньютоновской силой. Она всегда совпадает с направлением ускорения a , которое она формирует. Большая часть остальных сил - силы сопротивления движению. Они формируют не ускорения, а замедления, которые мы обозначаем символом b . 2. Главный принцип механодинамики В 1743 г. Даламбер дополнил основной закон Ньютона своим постулатом: в каждый данный момент времени на движущееся тело действует сила инерции, равная произведению массы тела на ускорение его движения F i ma . Эта сила направлена противоположно ньютоновской силе (1). Он ввёл и принцип, согласно которому сумма сил, действующих на движущееся тело, в каждый данный момент времени равна нулю. При этом Даламбер и все его последователи игнорировали тот факт, что тело движет ускоренно только ньютоновская сила ma , а все остальные силы, в том числе и сила инерции, замедляют ускоренное движение. Из этого автоматически следует, что модуль силы инерции не равен произведению массы тела на ускорение его движения, так как сила инерции не одна замедляет ускоренное движение материальных точек и тел, а совместно с другими силами: механическими и аэродинамическими. Обусловлено это тем, что сила инерции является силой сопротивления ускоренному движению и поэтому наряду с другими силами сопротивления генерирует замедление, а не ускорение. Поскольку ньютоновская сила – единственная движущая сила, то ускорение, генерируемое ею, должно быть равно сумме замедлений, генерируемых всеми силами, тормозящими ускоренное движение, в том числе и – силой инерции. Изложенное выше следует из эксперимента Галилея, который он провёл в начале 17 века. Суть его показана на рис. 1. Рис. 1. Современное представление эксперимента Галилея Если одному металлическому шару предоставить возможность свободно падать на Землю, а второму - опускаться на парашюте, то шар без парашюта, имея меньшее сопротивление воздуха, будет падать на Землю быстрее шара с парашютом. Сила тяжести F m g , приложенная к шару, выполняет роль ньютоновской активной силы (рис. 1, а). 3 Поскольку шар опускается ускоренно, то, согласно принципу Даламбера, на него действует сила инерции, направленная противоположно ньютоновской силе и равная F i m g . Кроме этих сил на шар действует ещё сила сопротивления воздуха P . Вполне естественно, что у шара с парашютом сила сопротивления воздуха больше и он опускается на Землю медленнее шара без парашюта. Итак, сила тяжести F g m g единственная сила, движущая шар. Движению шара к Земле сопротивляются две силы: даламберовская сила инерции F i m g и сила сопротивления воздуха P . Согласно принципу Даламбера в каждый данный момент сумма сил, действующих на ускоренно движущееся тело, равна нулю (рис. 1, а), то есть F g F i P 0 m g m g P 0 P 0. (2) Странный результат (2). При равенстве ускорений g ньютоновской силы F m g , даламберовская силы инерции F i m g и сила сопротивления P воздуха, действующего на шар, равна нулю P 0 . Противоречие очевидное и непонятно почему с ним так долго (более 300 лет) мирились механики и физики-теоретики. Чтобы устранить это противоречие, введём понятие замедление движения, обозначим его символом b и будем считать, что модули всех сил сопротивления движению равны произведениям массы m материальной точки или тела умноженной на замедления, которые они генерируют. Тогда уравнение (2) запишется так m g mb i mb C g b i b C , (3) где b i - замедление, генерируемое силой инерции; bC - замедление, генерируемое другими силами сопротивления. В общем случае ускорение, генерируемое ньютоновской силой, обозначается символом a . Тогда, если на ускоренно движущуюся точку или тело действует несколько сил сопротивления движению, то каждая из них будет генерировать замедление и уравнение (3) принимает вид (4) a bi b1 b 2 b 3 ... b n . Таким образом, Даламбер ошибся, утверждая, что сила инерции равна произведению массы материальной точки или тела на ускорение его движения и направлена противоположно действию Ньютоновской силы. Теперь мы видим, что сила инерции при ускоренном движении материальной точки или тела, препятствует их движению и совместно с другими силами сопротивления движению генерирует замедление, которое является частью общей суммы замедлений, генерируемых всеми силами сопротивления движению (4). А теперь посмотрим на рис. 1, b, где показана суть эксперимента Галилея. Представим, что шар без парашюта и - с парашютом помещен в большой цилиндр, из которого выкачан воздух. Оба они опускаются вниз под действием силы тяжести F g m g . (Массу парашюта не учитываем). Аналогичный эксперимент, выполненный Галилеем более 300 лет назад, показал, что тела разной массы и плотности опускаются вниз в трубке с выкаченным воздухом, с одной и той же скоростью. Удивительный эксперимент. Отсутствие сопротивления воздуха оставляет одну силу сопротивления ускоренному движению шара без парашюта и с парашютом – силу инерции F i mbi . Падение происходит потому, что величина силы тяжести F g m g в каждый данный момент превышает величину силы инерции F i mbi , так как g bi . 4 Изложенная информация убедительно доказывает, необходимость признания ошибочности принципа Даламбера и необходимость использования нового главного принципа - принципа механодинамики, который формулируется так: в каждый данный момент времени сумма активных сил, приложенных к телу, и сил сопротивления движению, включая силу инерции, равна нулю. При этом, ньютоновское ускорение всегда равно сумме замедлений, генерируемых силами сопротивления движению, включая и силу инерции (4). Изложенная исходная информация о видах движения тел, ньютоновской силе F и силе инерции Fi , достаточна для понимания законов механодинамики и применения их для решения практических задач. 3. Первый закон механодинамики Более 300 лет считалось, что ньютоновская сила F ma движет тело, а сумма сил F C сопротивления препятствует этому движению без участия силы инерции F i , которая также направлена противоположно движению (рис. 2, b). Чтобы убедиться в ошибочности такого подхода к решению задач механодинамики, рассмотрим подробно ускоренное движение центра масс М автомобиля, как материальной точки (рис. 2, b). Рис. 2. Схема сил, действующих на ускоренно (OA) движущийся автомобиль Каждый из нас ездил в автомобиле и знает, что при его ускоренном движении сила инерции прижимает нас к спинке сиденья. Из этого следует, что при ускоренном движении автомобиля (рис. 2, b) на него действует ньютоновская сила F , генерируемая его двигателем; сила инерции F i , направленная противоположно ускорению а автомобиля и поэтому тормозящая его движение; суммарная сила всех внешних сопротивлений F C , которая также направлена противоположно движению автомобиля. В результате, согласно новому принципу механодинамики, имеем неоспоримое уравнение сил, действующих на ускоренно движущийся автомобиль (рис. 2, b) F F c Fi F Fi F c 0. (5) Это и есть первый закон механодинамики. Он гласит: ускоренное движение тела происходит под действием ньютоновской активной силы F и сил сопротивления движению в виде силы инерции F i , и механических сил F C сопротивления, сумма которых в любой момент времени равна нулю (5). Из нового принципа механодинамики следует также, что ньютоновская сила F совпадает с направлением ускорения a , а силы, тормозящие движение и, таким образом, генерирующие замедление, совпадают с направлениями замедлений b , формируемых ими (рис. 2, b). Обозначая замедление, принадлежащее силе инерции, через b i , а замед- 5 ление, генерируемое силами механических сопротивлений F C , через bC , перепишем уравнение (5) таким образом (6) m a m bi m b c . Нетрудно видеть, что при полном отсутствии механических сил сопротивления F c 0 (в космосе, например) сила инерции F i m bi равна ньютоновской силе F m a , но тело движется. Это возможно только при условии, когда ньютоновская сила больше силы инерции, поэтому математическая модель, описывающая движение тела в космосе, должна представляться в виде неравенства или F F i ma mbi , a bi . (7) (8) Это и есть условие ускоренного движения тела в космосе при отсутствии сопротивлений. Из этого следует, что истинное инерциальное замедление b i тела можно определить в условиях, когда нет внешних сопротивлений. Вполне естественно, что специалисты по космической технике владеют методами таких определений и имеют экспериментальную информацию об этом. Таким образом, величина полного ускорения a тела, движущегося ускоренно, равна сумме замедлений, генерируемых силами сопротивления движению a bi bC (9) В старой динамике считалось, что сила инерции F i , которая также препятствует ускоренному движению тела, не входит в сумму всех сил сопротивлений F C . Это и есть главная фундаментальная ошибка ньютоновской динамики, которая оставалась незамеченной 322 года. Сила инерции автоматически входила в суммарную силу механических сопротивлений F C , но все считали, что её там нет. В результате все экспериментальные коэффициенты механических сопротивлений движению тел оказываются ошибочными. Из уравнения (6) следует, что сила инерции F i , действующая на автомобиль при его ускоренном движении, равна F i mb i ma mb c , (10) а скалярная величина инерциального замедления b i определится по формуле bi a bC (11) Величина полного ньютоновского ускорения a определяется из кинематического уравнения ускоренного движения тела V V0 at . (12) Если начальная скорость автомобиля V0 0 , то полное ускорение a равно скорости V автомобиля в момент перехода его от ускоренного к равномерному движению, делённому на время t ускоренного движения a V /t . (13) 6 В принципе, при решении задач, можно принимать величину скорости V , равной величине постоянной скорости ( V const ) тела при его равномерном движении, наступившем после ускоренного движения. Сумма сил F C сопротивлений – величина экспериментальная, которую следует определять только при равномерном движении, чтобы исключить из неё силу инерции. Таким образом, имеются все данные необходимые для определения инерциального замедления b i и расчёта силы инерции F i по формуле (10). Из неё следует, что инерциальное замедление b i зависит от сопротивления среды F C mb c (11). Если определяются силы сопротивления движению тела, то делать это надо только при его равномерном движении. Если же сумму сил F C сопротивления движению тела определять при его ускоренном движении, то, в соответствии с формулой (5), сила инерции F i , препятствующая ускоренному движению тела, автоматически войдёт в сумму сил F C сопротивлений движению и результат определения сил сопротивлений будет полностью ошибочен. 4. Второй закон механодинамики Когда автомобиль начинает двигаться равномерно (рис. 3, b), то сила инерции F i автоматически изменяет своё направление на противоположное и уравнение суммы сил (5), действующих на автомобиль, становится таким F A Fi FC. (14) Рис. 3. Схема сил, действующих на равномерно движущийся автомобиль Это и есть второй закон механодинамики – закон равномерного прямолинейного движения тела (бывший первый закон ньютоновской динамики). Он гасит: равномерное движение тела при отсутствии сопротивлений (рис. 3, а, интервал АВ) происходит под действием силы инерции F i (в космосе, например). Равномерное движение тела при наличии сопротивлений также происходит под действием силы инерции F i , а постоянная активная сила F A преодолевает силы сопротивления движению F C (рис. 3, b). Таким образом, суть второго закона механодинамики заключается в том, что равномерное движение автомобиля (тела) обеспечивает сила инерции F i , а постоянная сила F A , генерируемая двигателем автомобиля, преодолевает все внешние сопротивления F C . Сила F A постоянна потому, что автомобиль движется равномерно и его ускорение равно нулю а 0 . В космосе, где нет механических сопротивлений движению, не требуется постоянная сила для их преодоления. Поэтому в космосе при переходе тела от ускоренного к равномерному движению, сила инерции меняет своё направление на противоположное и таким образом обеспечивает его равномерное прямолинейное движение с постоянной скоростью V const (рис. 3, интервал АВ). 7 А теперь обращаем внимание ещё раз на главную многовековую ошибку механиков. Для этого перепишем уравнение (14) так F A Fi FC 0 (15) Это и есть математическая модель второго закона механодинамики (бывшего первого закона динамики). Более 300лет не было математической модели для описания равномерного движения тела. Теперь она есть (14), (15) и мы можем успокоить пилотов. Равномерный полёт их самолёта описывает новый второй закон механодинамики (14). Согласно этому закону сумма сил, действующих на равномерно летящий самолет, не равна нулю (15). Сила, движущая самолёт равномерно, является силой инерции, которая была направлена противоположно его движению, когда он двигался ускоренно (взлетал). Как только самолет начинает лететь равномерно, то сила инерции изменяет своё направление на противоположное и совпадает с силой, генерируемой двигателями самолета. В результате сила инерции начинает обеспечивать равномерный полёт самолета, а силы F A двигателей самолета - преодолевать силы сопротивления F C его полету. Таким образом, равномерный полёт самолета управляется новым вторым законом механодинамики (14), согласно которому сумма сил, действующих на него, не равна нолю (15). 5. Третий закон механодинамики Если выключить коробку передач автомобиля, движущегося равномерно (15), то активная сила F K исчезнет (рис. 3, b) и останутся две противоположно направленные силы: сила инерции F i и сумма сил механических сопротивлений движению F C (рис. 4, b). Поскольку сила инерции не имеет источника, поддерживающего её в постоянном состоянии, то она оказывается меньше сил сопротивления движению ( F i F c ) и автомобиль, начиная двигаться замедленно (рис. 4, b), останавливается (рис. 4, a, точка С). С учётом этого есть основания назвать силу инерции пассивной силой, которая не может генерировать ускорение, так как сама является следствием его появления. Таким образом, надо чётко представлять направленность сил, действующих на автомобиль, при переходе его от равномерного движения к замедленному. Первичная сила инерции F i (рис. 4, b) не меняет своего направления, а появившееся замедление bC , генерируемое силами сопротивления движению, оказывается направленным противоположно силе инерции. Таким образом, если автомобиль переходит от равномерного движения к замедленному, то прежня сила инерции F i и силы сопротивления движению F C не меняют своих направлений. Сила инерции не генерирует ускорение, а неравномерность сил сопротивления приводит к постепенному уменьшению силы инерции F i и тело останавливается. (16) Fc Fi . Это и есть математическая модель 3-го ЗАКОНА механодинамики. Он гласит: замедленное движение твёрдого тела управляется превышением сил сопротивления движению над силой инерции. 8 Рис. 4. Схема сил, действующих на замедленно движущийся автомобиль Обратим внимание на то, что расстояние S1 движения автомобиля с ускорением меньше расстояния движения с замедлением S 3 S 2 (рис. 4, a). Обусловлено это тем, что на участке S1 величина сил сопротивлений F C при разгоне автомобиля больше сил сопротивлений при замедленном движении за счёт того, что при замедленном движении выключен двигатель и коробка передач. Это - главная причина экономии топлива при езде с периодическим выключением передачи. 6. Кориолисова сила и кориолисово замедление 6.1. Вводная информация А теперь рассмотрим сложное движение точки, при котором формируется кориолисово, как считалось, ускорение, а фактически оно является кориолисовым замедлением. Начнём с анализа конкретного примера. Рассмотрим силы, действующие на ползун, движущийся по стержню, вращающемуся в горизонтальной плоскости (рис. 5). Вполне естественно, что начинать надо с ускоренного вращения стрежня. Напомним, что вращение стержня называется переносным движением, скорость ползуна в этом движении – переносной скоростью Ve , ускорение – переносным ускорением ae , сила, вращающая ползун, - переносной силой Fe . Движение ползуна вдоль стержня называется относительным движением, скорость – относительной скоростью Vr , ускорение – относительным ускорением ar и сила, движущая ползун вдоль стержня, - относительной силой Fr (рис. 5). 9 Рис. 5. Схема сил, действующих на ползун М Прежде чем приступать к схематическому показу сил, действующих на ползун (рис. 5), обратим внимание на жёсткую связь между вращательным (переносным) движением ползуна и линейным (относительным) движением ползуна вдоль стержня. Совокупность этих движений значительно отличается от перемещения, например, пассажира вдоль движущегося трамвая. Пассажир может менять свою относительную скорость Vr произвольно, а ползун лишён такой возможности. Его переносная Ve и относительная Vr скорости связаны между собой. Такая же жёсткая связь и у сил, действующих на ползун. Поэтому, составляя схему сил, действующих на ползун, обязательно надо учитывать указанную взаимосвязь между его переносным и относительным движениями (рис. 5). 6.2. Ускоренное движение стержня С учётом изложенного, проведём тщательный анализ процесса движения ползуна (рис. 5) при ускоренном вращении стержня. В этом случае на ползун действуют следующие силы: переносная сила F e , вектор которой направлен по нормали к стержню в сторону движения и равен нормальной реакции N T стержня на ползун; сила трения F T направлена противоположно движению ползуна относительно стержня. Она связана с нормальной реакцией N T через угол трения T ( FT N tgT ) и коэффициент трения f ( FT fN ). Результирующая сила R T силы трения F T и нормальной реакции N T образуют угол трения T (рис. 5). Известно, что ползун начнёт ускоренное движение вдоль стержня (вдоль оси ох ) лишь тогда, когда вектор результирующей силы R T отклонится от нормали N T на угол немного больший угла трения T в сторону относительного движения ползуна. Пре- вышение угла отклонения результирующей R T от угла трения T (рис. 5) настолько незначительно, что отклонение результирующей R T от нормали N T в момент начала ускоренного движения ползуна можно принимать этот угол, равным углу трения T . Направление абсолютного ускорения a , совпадает с направлением вектора результирующей силы R T . 10 Вторая составляющая результирующей силы R T , направленная вдоль оси ОХ, является относительной силой Fr . Эта сила генерирует относительное ускорение a r e2 x . До нашего анализа считалось, что вектор этого ускорения направлен к центру вращения. Поскольку Fr , в данном случае, - движущая сила, то вектор ускорения a r этой силы не может быть направлен к центру вращения стержня. Он совпадает с направлением действия силы Fr , то есть вектор ускорения a r в данном конкретном случае направлен от центра вращения, а не к центру, как считалось до сих пор, поэтому у нас есть основания назвать его ( a r ) относительным центробежным ускорением, а силу Fr - центробежной силой. Далее, надо учесть существование предельно большой величины силы трения F T соответствующей коэффициенту трения f , который связан с углом трения зависимостью f tgT . При ускоренной фазе вращения стержня с угловым ускорением e результирующая сила R T достигнет предельно большой величины, определяемой силой трения F T (рис. 5). Как только ползун начнёт движение вдоль стержня, увеличение силы трения F T прекратится, но увеличение результирующей силы, которую мы обозначили символом R T , продолжится за счёт продолжающегося увеличения переносного a e и относительного a r ускорений, поэтому результирующую силу, независящую от силы трения, обозначим символом R . Если закон вращения ползуна задан e t , (17) то при переменном вращении стержня переменная угловая скорость вращения определится зависимостью d de t e e t dt dt . e этого (18) Теперь надо задать время от начала ускоренного вращения стержня до момента пе- рехода его к равномерному вращению ( e const ) или угол поворота от начала ускоренного вращения до перехода к равномерному вращению. Примем et 2n . (19) Из этого находим время ускоренного вращения стержня t 2n / e (20) и среднюю величину угловой скорости e t 2n рад. / с (21) При таком определении времени ускоренного вращения стержня переносная угловая скорость e , входящая в выражение (20), является усреднённой постоянной величиной, но, тем не менее, она отражает время t , затраченное на ускоренное вращение ползу- 11 на, и мы имеем право использовать математическую модель (20) для описания ускоренного вращения стержня и ускоренного относительного движения ползуна. А теперь обращаем внимание на то, что в данном случае относительное и тангенциальное ускорения ползуна равны по величине и их направления совпадают a r a . (22) Тогда относительное и касательное ускорения ползуна будут равны: ar a dVr d (e x ) e x e Vr dt dt d (e x) de dx x e e x eVr . dt dt dt (23) (24) Из законов механодинамики следует, что ускорение, формируемое активной силой, при ускоренном движении точки, равно сумме замедлений, формируемых всеми силами, замедляющими ускоренное движение точки. Из рис. 5 следует, что касательное ускорение ползуна равно замедлению br , формируемому всеми силами сопротивлений относительному движению ползуна вдоль стержня (оси ОХ) a br eVr (25) Итак, векторное уравнение сил, действующих на ползун, имеет такой общий вид (рис. 5) R R i F T 0 ma mb f N 0 . (26) Проектируя силы, приложенные к ползуну, на оси ОХ и ОУ, имеем: Fx Fr Fri FT 0 Fx meVr mbr fmeVr 0 ; Fy Fe N Fik 0 meVr meVr mbk 0. (27) (28) Преобразуем уравнение (28) таким образом Fy Fe N Fik 0 (29) meVr meVr mb 2meVr mb 0. k k Давно установлено, что кориолисово ускорение равно ak 2eVr . Из нашего анализа следует, что это не ускорение, а замедление и мы обозначили его символом bk . b 2eVr . k (30) Появление двойки в математическом выражении кориолисова замедления (30) – это следствие двух равных сил, действующих на ползун, спроектированных на ось ОУ (рис. 5), - переносной активной силы Fe и реакции связи N (самого стержня), также 12 действующего на ползун при его переносном движении. Уравнение этих сил, спроектированных на нормаль к стержню, по которому движется ползун, следует из рис. 5. Оно имеет вид Fk Fe N (31) Заключение Из детального анализа процесса движения ползуна вдоль вращающегося стержня выясняется, что кориолисова сила инерции Fk , как и все силы инерции, формирует замедление bk , совпадающее с направлением самой силы (рис. 5). ЛИТЕРАТУРА 1. Канарёв Ф.М. Теоретическая механика. http://www.micro-world.su/