Микроконтроллер TMDSHVMTRPFCKIT Texas Instruments с
реклама

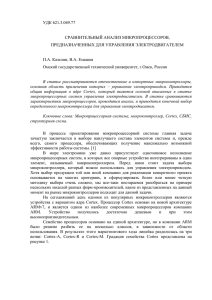
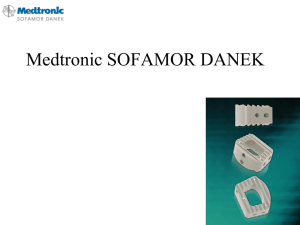
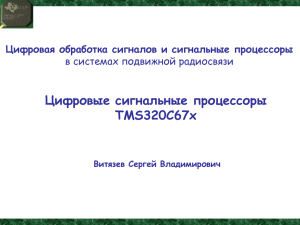
Микроконтроллер TMDSHVMTRPFCKIT Texas Instruments с системой Управления Асинхронным Электроприводом А.А.З. Диаб, Египет Научный руководитель: ПАНКРАТОВ В..В., д.т.н., профессор Новосибирский государственный технический университет, Новосибирск, Россия engahmedz@yahoo.com Введение. В статье рассматриваются варианты Микроконтроллер TMDSHVMTRPFCKIT Texas Instruments с системой Управления Асинхронным Электроприводом. Рассмотрена структурная схема системы управления, математические уравнения и алгоритмы цифровой реализации ее элементов. Представлены результаты экспериментальных исследований процессов при работе векторного управления Асинхронным электроприводом. Экспериментальная схема Система управления создана на базе отладочного комплекта TMDSHVMTRPFCKIT с модулем управления Piccolo F28035 controlCARD производства Texas Instruments в среде программирования цифровых сигнальных процессоров CodeComposerStudio v5. Экспериментальное оборудование показано на рис. 1 [1-6]. TMDSHVMTRPFCKIT (High Voltage Motor Control and PFC Developers Kit) – это отладочный набор компании Texas Instruments. Силовая часть преобразователя состоит из звена постоянного тока, корректора мощности (PFC) и трехфазного транзисторного инвертора (IPM). Корректор необходим для равномерного использования мощности, он обеспечивает отсутствие выплесков потребляемого тока на вершине синусоиды и равномерную нагрузку. PFC питается напряжением сети переменного тока (~110…~240 В) и обеспечивает выходную мощность до 750 Вт. Модуль инвертора может питаться или от PFC или от отдельной силовой ступени с напряжением до 400 В и отдавать на выход мощность до 1,5 кВт [4-5]. Двигатель АД управляется от автономного инвертора напряжения. Система управления реализована на базе процессора TMS320F28035, которая генерирует сигналы широтно-импульсной модуляции для формирования синусоидального напряжения на статоре двигателя. Сигналы с датчиков тока и датчика напряжения шины постоянного тока поступают через АЦП в систему управления. Общая структура построенной системы управления асинхронным электроприводом показана на рис. 2. Результаты эксперимента На рис. 3. представлены временные диаграммы процессов в скорости двигателя полученных на экспериментальной установке при разгоне привода со скорости 0,3 о.е. на скорость 0,02 о.е. Отметим, что частота вращения ротора и задания вращения ротора почти одинаковы, что подтверждает эффективность векторного управления АД. Рис. 1. Экспериментальное оборудование. Рис. 2. управления асинхронным электродвигателем на основе TMDSHVMTRPFCKIT и C2000 MCU. r Рис. 3. Графики переходных процессов по частоте вращения при разгоне привода со скорости 0,3 о.е. на скорость 0,02 о.е. Выводы В этой статье исследуется системы векторного управления электроприводом на основе асинхронным электроприводом с комплектом TMDSHVMTRPFCKIT Компании Texas Instruments. Результаты показано, высокой точности стабилизации заданных скорости и момента при требуемом качестве переходного процесса. Литература 1. P. Vas, “The control of AC machines”, Oxford Univ., 1990. 2. Diab, A.A.Z.; Kotin, D.A.; Pankratov, V.V., "Speed control of sensorless induction motor drive based on model predictive control," Micro/Nanotechnologies and Electron Devices (EDM), 2013 14th International Conference of Young Specialists on , vol., no., pp.269,274, 1-5 July 2013. 3. Ahmed A. Zaki Diab and Vladimir V. Pankratov, “Model Predictive Control of Vector controlled Induction Motor Drive”, the 7th International Forum on Strategic Technology IFOST2012, IEEE Conference on, Tomsk, September 17- 21, 2012, V II, p. 21 – 26. 4. Texas Instruments C2000 Systems and Applications Team. High Voltage Motor Control and PFC (R1.1) Kit Hardware Reference Guide., v.2, 2012. 5. Texas Instruments. CONTROLSUITE. http://www.ti.com/tool/controlsuite. 6. НПФ Мехатроника ПРО. MexBIOS http://mechatronica-pro.com. Development Studio. – Website: