Ответы на вопросы к зачету по математическому анализу
реклама

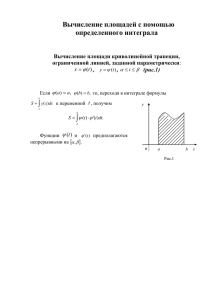
Ответы на вопросы к зачету по математическому анализу. (1 курс / 2 семестр) 1. Определение неопределённого интеграла. Если функция f(x) определена и непрерывна на промежутке (a, b) и F(x) – ее первообразная, т.е. F’(x) = f(x) при a x b , то f(x)dx F(x) C , a x b , где С – произвольная постоянная. 2. Основные свойства неопределенного интеграла. а. f(x)dx f(x)dx производная от интеграла равна подынтегральной функции. б. dÔ(x) Ô(x) C интеграл от дифференциала функции равен этой функции плюс постоянная интегрирования. в. Af(x) A f(x) , (A=const) постоянную можно выносить за знак интеграла. г. f(x) g(x) f(x)dx g(x)dx интеграл суммы равен сумме интегралов. 3. Табличные простейшие интегралы. I. x n dx x n 1 ,(n 1) n 1 dx ln x C,(x 0) x arctx C, dx III. 2 1 x arcctgx C. II. 1 1 x ln C. 2 1 x arcsinx C, dx V. 2 1x arccosx C. dx VI. ln x x 2 1 C. 2 x 1 ax x VII. a dx C (a 0, a 1) ; ex dx e x C lna VIII. sinxdx cosx C dx 1 x IV. 2 IX. cosxdx sin x C X. dx sin x ctgx C 2 dx cos x tgx C XII. shxdx chx C XIII. chxdx shx C XI. XIV. XV. 2 dx sh x -cthx C 2 dx ch x thx C 2 и табличные интегралы dx 1 x arctg C (a 0) 2 x a a dx 1 ax ln C (a 0) II. 2 2 a x 2a a-x xdx 1 ln a 2 x 2 C III. 2 2 a x 2 dx x arcsin C (a 0) IV. 2 2 a a x dx ln x x 2 a 2 C (a 0) V. 2 2 x a xdx a 2 x 2 C (a 0) VI. 2 2 a x x 2 a2 x 2 2 2 a x VII. a x arcsin C (a 0) 2 2 2 2 x a x 2 a2 VIII. x 2 a2 ln x x 2 a 2 C (a 0) 2 2 I. a 2 4. Основные методы интегрирования. а. Метод введения нового аргумента. Если f(x)dx F(x) C , то f(u)du F(u) C , где u (x) - непрерывно дифференцируемая функция. б. Метод разложения. Если f(x) f1 (x) f2 (x) , то f(x)dx f1 (x)dx f 2 (x)dx . в. Метод подстановки. Если f(x) непрерывна, то, пологая x (t) , где (t) непрерывная вместе со своей производной x ' (t) , получим f(x)dx f( (t)) ' (t)dt . г. Метод интегрирования по частям. Если u и v – некоторые дифференцируемые функции от х, то udu uv vdu . 1 a В этом случае интеграл можно упростить с помощью естественной замены z ax b , откуда 1 1 x ( z b) и dx dz . Пусть известна первообразная F (z ) для f (z ) : f ( z ) F ( z ) C . a a 1 1 1 Выполняя подстановку, получаем: f (ax b) = f ( z ) dz z axb = F ( z ) C z axb = F (ax b) C a a a 5. Доказать, что если f(x)dx F(x) C , то f(ax b)dx F(ax b) C . 6. Интегрирование рациональных функций (метод неопределенных коэффициентов, метод Остроградского). Формулы Остроградского P(x) Q(x) dx P(x) Пусть - правильная дробь, где Q(x) = (x a1 )n (x a2 )n2 ... (x ak )nk (x 2 p1x q1 )m1 Q(x) ... (x 2 pe x q e )me . Простейшие дроби (4 вида): A A B B , , 2 , 2 , где (x 2 px q) - не имеет действительных корней. n (x a) (x a) (x px q) (x px q)m P(x) Q(x) dx = P1 (x) + Q1 (x) P2 (x) Q (x) dx . 2 7. Интегрирование иррациональных функций. Общий принцип интегрирования иррациональных выражений заключается в замене переменной, позволяющей избавиться от корней в подынтегральном выражении. Для некоторых классов функций эта цель достигается с помощью стандартных замен. ax b dx , где R (u,v) - рациональная функция своих аргументов, Интегралы вида R x, n cx d вычисляются заменой t n ax b . cx d a a Интегралы вида или x . x a dx вычисляются заменой x cos t sin t Интегралы вида Rx, x a dx вычисляются заменой x atgt или x asht . Интегралы вида Rx, Rx, n n a 2 x 2 dx вычисляются заменой x a cos t или x a sin t . 2 2 2 2 Дифференциальный бином x m (a bx n ) p dx . Интеграл от дифференциального бинома x m (a bx n ) p dx , где m, n и p – рациональные числа, может быть приведен к интегрированию рациональных функций лишь в следующих трех случаях (теорема Чебышева): Случай 1. Пусть p – целое. Тогда полагаем x z N , где N – общий знаменатель дробей m и n. Случай 2. Пусть m 1 - целое. Тогда полагаем a bx n z N , где N – общий знаменатель дроби p. n m 1 p - целое. Тогда применяем подстановку ax -n b z N , где N – знаменатель Случай 3. Пусть n дроби p. Если n=1, то эти случаи эквивалентны следующим: а. р – целое б. m – целое г. m + p – целое. 8. Интегрирование тригонометрических функций. Интегрирование рационально-тригонометрических функций r (sin x, cos x)dx всегда рационализует 2t 2dt 1 t 2 x универсальная подстановка tg = t( sin x , cos x , dx ). 2 2 1 t 1 t2 1 t 2 Вычисление интегралов вида R(sinx,cosx)dx , где R – рациональная функция, в общем случае приводится к интегрированию рациональных функций x с помощью подстановки tg t . 2 а. Если выполнено равенство R(-sinx, cosx) R(sinx,cosx) или R(sinx,-cosx) R(sinx, cosx) , то выгодно применить подстановку cos x = t или соответственно sin x = t. б. Если R(-sinx,-cosx) R(sinx, cosx) , то полезно применить подстановку tg x =t. Вычисление интегралов вида dx asinx bcosx . приведя знаменатель к логарифмическому виду (хз каг) 9. Интегрирование трансцендентных функций. 10. Определенный интеграл как предел суммы. а. Интеграл (в смысле Римана). Если функция f(x) определена на a, b и a x 0 ... x n b , то b интегралом функции f(x) на сегменте a, b называется число f(x)dx a n 1 lim f(ξ )Δx , где max Δxi 0 i o i i x i ξ i x i 1 и Δxi x i 1 x i . Для существования предела необходимо и достаточно, чтобы нижняя интегральная сумма n 1 n 1 i 0 i 0 S m i Δx i и верхняя интегральная сумма S M i Δx i , где mi inf f(x) и M i sup f(x) , x i x x i1 x i x x i 1 имели общий предел при max Δxi 0 . Функции f(x), для которых предел в правой части равенства существует, называются интегрируемыми (собственно) на соответствующем промежутке. В частности, а) непрерывная функция; б) ограниченная функция, имеющая конечное число точек разрыва; в) ограниченная монотонная функция, - интегрируема на любом конечном сегменте. Если функция f(x) не ограничена на сегменте a, b , то она собственно не интегрируема на a, b . б. Условие интегрируемости. Необходимым и достаточным условием интегрируемости на данном сегменте a, b функции f(x) является выполнение равенства функции f(x) на сегменте x i , x i 1 . lim max Δx i 0 n 1 w Δx i i 0 i 0 , где wi - колебания 11. Формула Ньютона-Лейбница. Если функция f(x) определена и непрерывна на сегменте a, b и F(x) – ее первообразная, то b f(x)dx F(b) F(a) a b a . Формула интегрирования по частям. b b b Если f(x), g(x) C(1) [a, b] , то f(x)g' (x)dx f(x)g(x) g(x)f' (x)dx . a a a Формула замены переменной. Если: 1) функция f(x) непрерывна на сегменте [a, b] ; 2) функция (t) непрерывна вместе со своей производной ' (t) на сегменте [a, b] , где a ( ) , b ( ) ; 3) сложная функция f( (t)) определена и b a непрерывна на , , то f(x)dx f( (t)) ' (t)dx . 12. Определение несобственного интеграла. Если функция f(x) собственно интегрируема на каждом конечном сегменте [a, b] , то, по определению, полагают b f(x)dx lim f(x)dx (1). a b a Если f(x) не ограничена в окрестности точки b и собственно интегрируема на каждом сегменте b- b [a, b ] ( 0) , то принимают f(x)dx lim f(x)dx (2). a 0 a Если пределы (1) или (2) существуют, то соответствующий интеграл – сходящийся, в противном случае – расходящийся (в элементарном смысле). 13. Геометрический смысл определенного интеграла. b Определенный интеграл f(x)dx при f(x) 0 геометрически представляет собой площадь S, a ограниченную кривой y=f(x), осью Ох и двумя перпендикулярами к оси Ох: х=а и х=b. 14. Вычисление площади фигуры в прямоугольных координатах. Площадь S плоской фигуры A1A 2B2B1 , ограниченной двумя непрерывными кривыми: y y1 (x) и b y y2 (x) ( y1 (x) y2 (x) ) и двумя прямыми: х=а и х=b ( a b ), равна S [y 2 (x) y1 (x)]dx . a Вычисление площади фигуры в полярных координатах. Площадь S сектора OAB, ограниченного непрерывной кривой r r( ) и двумя полупрямыми и 1 ( ), равна s r 2 ( )d . 2 Вычисление площади фигуры, ограниченной кривой, заданной в параметрическом виде. Если х=х(t), y=y(t), [0 t T] - параметрические уравнения кусочно-гладкой просто замкнутой кривой С, пробегаемой против хода часовой стрелки и ограничивающей слева от себя фигуру с площадью S, T T T 1 то S y(t)x' (t)dt y' (t)x(t)dt , или S y' (t)x(t) - y(t)x' (t)dt . 20 0 0 15. Вычисление длины дуги в прямоугольных координатах. Длина дуги отрезка гладкой (непрерывно дифференцируемой) кривой y=y(x) ( a x b ) равна b s 1 y'2 (x)dx . a Вычисление длины дуги в полярных координатах. (1) Если r r( ) , где r( ) C [ , ] , то длина дуги соответствующего отрезка кривой равна s r 2 ( ) r'2 ( )d . Вычисление длины дуги кривой, заданной параметрически. Если кривая С задана уравнениями х=х(t), y=y(t), [t 0 t T] , где х(t), y(t) C(1) [t 0 , T] , то длина дуги T кривой С равна s t0 x'2 (t) y'2 (t)dt . 16. Вычисление объема тела по известным поперечным сечениям. Если объем V тела существует и S=S(x) a x b есть площадь сечения тела плоскостью, b перпендикулярной к оси Ох в точке х, то V S(x)dx . a Объем тела вращения. Объем тела, образованного вращением вокруг оси Ох криволинейной трапеции a x b , b 0 y y(x) , где y(x) – непрерывная однозначная функция, равен Vx y 2 (x)dx a . В более общем случае объем кольца, образованного вращением воруг оси Ох фигуры a x b , y1 (x) y y2 (x), где y1 (x) и y2 (x) – непрерывные однозначные функции, равен b Vx π y22 (x) - y12 (x) dx . a 17. Вычисление площади поверхности вращения. Дифференциал дуги. B Площадь поверхности, образуемой вращением гладкой кривой АВ вокруг Ох, равна ds – дифференциал дуги. P 2π y ds A , где 18. Физический смысл определенного интеграла. Моменты. Если на плоскости Оху масса М плотности ( y ) заполняет некоторый ограниченный континуум (линию, плоскую область) и ( y ) - соответствующая мера (длинна дуги, площадь) той части континуума , ординаты которой не превышают у, то k-моментом массы М относительно оси Ох называется число M k = n lim ( y ) y ( y ) = y d ( y ) , (k=0,1,2,…), где y max yi 0 i 1 i k i k i i i yi yi 1 и ( yi ) ( yi ) ( yi 1 ) . Как частные случаи, получаем при k=0 массу М, при k=1 – статический момент, при k=2 – момент инерции. Аналогично определяются моменты массы относительно координатных плоскостей. Если 1 , то соответствующий момент называется геометрическим (момент линии, плоской фигуры, тела и т.д.). Центр тяжести. Координаты центра тяжести ( x0 , y0 ) однородной плоской фигуры площади S M 1( y) M ( x) , y0 1 , где M 1( y ) , M 1( x ) - геометрические статические S S моменты фигуры относительно осей Оу и Ох. определяются по формулам: x0 19. Функция нескольких переменных. Определение предела функции. Пусть функция f(P) f(x1 , x2 ,...x n ) определена на множестве Е, имеющем точку сгущения P0 . Говорят, что lim f(P) A , если для любого 0 существует δ δ(ε, P0 ) 0 , такое что f(P) A ε PP0 при P E и 0 ρ(P, P0 ) δ , где ρ(P, P0 ) - расстояние между точками P è P0 . Определение непрерывности функции. Функция f(P) непрерывна в P0 , если lim f(P) f(P0 ) . Функция f(P) непрерывна в данной области, если PP0 она непрерывна в каждой точке этой области. 20. Частные производные. Результат частного дифференцирования функции нескольких переменных не зависит от порядка дифференцирования, если все производные, входящие в вычисление непрерывны. Формула дифференциала функции. df(x, y,z) f x (x, y,z)dx f y (x, y,z)dy fz (x, y,z)dz 21. Символическая форма дифференциала высшего порядка. d n f(x, y,z) (dx dy dz ) n f(x, y,z) x y z 22. Формула производной сложной функции. Производная сложной функции: w w x w y w z , u x u y u z u w w x w y w z . v x v y v z v Для вычисления производных второго порядка функции w полезно пользоваться символическими формулами: P1 w R1 w 2w Q1 w = (P1 + + Q1 R1 )2 w + 2 u z u x y z u y u x и P w R1 w 2w Q1 w = (P1 + + . Q1 R1 ) (P2 Q2 R 2 )w + 1 v x v z uv x y z x y z v y где x y z x y z P1 , Q1 , R1 . P1 , Q1 , R1 . u u u v v v Какие-то формулы: f(x y, xy) f ' = fx' y * (x y)'x + fxy * (xy)'x . x dano f(xy;x+y) Pust' k=xy; l=x+y df/dx=df/dk*dk/dx+df/dl*dl/dx=f'[k]*y+f'[l]*0=y*f'[k] d^2f/dxdy=(P[1]*df/dk+Q[1]*df/dl)(P[2]*df/dk+Q[2]/df/dl)+dP[1]/dy*df/dk+dQ[1]/dl*df/dl= gde P[1]=dk/dx; P[2]=dk/dy; Q[1]=dl/dx; Q[2]=dl/dy =(y*f'[k])*(x*f'[k])+f'[k]=x*y*f''[kk]+f'[k] d^2f/dx^2=(P[1]*df/dk+Q[1]*df/dl)^2+d*P[1]/dy*df/dk+d*Q[1]/dy*df/dl=y^2*f''[kk]+f'[k]