МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
В.Ф. КУЗИЩИН, Е.И. МЕРЗЛИКИНА
АВТОМАТИЧЕСКАЯ НАСТРОЙКА АСР с контроллером ПЛК
Лабораторная работа №7
Методическое пособие по курсам
«Технические средства автоматизации» и
«Автоматизация систем теплоснабжения и кондиционирования»
для студентов, обучающихся по направлению
«Теплоэнергетика и теплотехника»
Москва
Издательский дом МЭИ
2013
2
УДК
621.36
К 89
Утверждено учебным управлением МЭИ
Подготовлено на кафедре автоматизированных систем управления
тепловыми процессами
Рецензент: канд. техн. наук, доцент В.П.Зверьков
Кузищин В. Ф., Мерзликина Е.И.
К 89. Автоматическая настройка регулятора на базе контроллера ПЛК 150.
Лабораторная работа № 6: Методическое пособие/ В.Ф. Кузищин, Е.И.
Мерзликина. – М.: Издательский дом МЭИ, 2013. – 12 с.
Посвящена изучению методики и приобретению навыков выполнения
автоматической настройки ПИД-регуляторов с исполнительным механизмом
постоянной скорости с оценкой модели объекта в режиме автоколебаний на базе
программируемого контроллера ПЛК 150 в среде CoDeSys.
Продолжительность лабораторных занятий – 4 часа.
Предназначено для студентов ИТАЭ, ИПЭЭФ.
______________
Учебное издание
Кузищин Виктор Федорович
Мерзликина Елена Игоревна
АВТОМАТИЧЕСКАЯ НАСТРОЙКА РЕГУЛЯТОРА
НА БАЗЕ КОНТРОЛЛЕРА ПЛК 150
Лабораторная работа № 6
Методическое пособие по курсам
«Технические средства автоматизации», «Автоматические системы управления
объектами промтеплоэнергетики» и
«Автоматизация систем теплоснабжения и кондиционирования»
для студентов, обучающихся по направлению
«Теплоэнергетика и теплотехника»
Редактор издательства
Темплан издания МЭИ 2013, учебн.
Подписано в печать
Печать офсетная
Формат 60х84/16
Физ. печ. л. 0,75
Тираж 100 экз.
Изд. №
Заказ №
ЗАО «Издательский дом МЭИ», 111250, Москва, Красноказарменная, д. 14
Отпечатано в типографии ФКП «НИИ «Геодезия», 141292, Московская обл.,
г. Красноармейск, просп. Испытателей, д. 14
© Национальный исследовательский университет
Московский энергетический институт, 2013
3
1. ЦЕЛЬ РАБОТЫ
Изучение методики и приобретение навыков выполнения
автоматической настройки регуляторов (АНР) с оценкой модели объекта в
режиме автоколебаний на базе контроллера ПЛК 150 в среде CoDeSys.
2. ЗАДАНИЕ НА РАБОТУ
1. Изучить программу реализации АСР температуры с функцией АНР
на базе ПЛК150 и исполнительного механизма (ИМ) МЭО.
2. Проверить конфигурирование ПЛК150 для реализации АСР.
3. Измерить время полного хода МЭО.
4. Выполнить настройку регулятора с использованием функции АНР.
5. Выполнить испытания АСР при изменении задания и при
возмущении регулирующим органом.
6. Обработать графики полученных процессов, сделать выводы.
2. ВОПРОСЫ ДЛЯ КОЛЛОКВИУМА ПЕРЕД РАБОТОЙ
1. В чем состоит задача настройки регуляторов?
2. Какая информация требуется для выполнения аналитических
расчетов оптимальной настройки регуляторов?
3. Каким образом обеспечивается запас устойчивости АСР при расчете
настройки регуляторов?
4. Какие показатели характеризуют точность работы АСР?
5. Каким образом можно получить математическую модель объекта
управления на основе активного эксперимента?
6. Каким образом можно создать режим незатухающих колебаний при
работе с объектом управления и оценить вектор КЧХ объекта?
7. Каким путем можно проверить на действующей системе
эффективность настройки регулятора?
8. Какой характер управляющих сигналов используется при реализации
линейных законов регулирования c ИМ постоянной скорости?
9. Каким образом можно осуществить оперативное управление и
регистрацию процессов при работе с контроллерами ПЛК150?
3. КРАТКО ОБ АСР И АЛГОРИТМЕ АВТОНАСТРОЙКИ
Данная работа посвящена АНР в действующей системе на примере
АСР температуры электронагревателя с ПЛК150 и ИМ типа МЭО.
Описание лабораторного стенда приведено в пособии к лабораторной
работе 1. Структурная схема АСР с АНР приведена на рис.1.
4
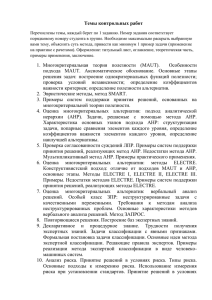
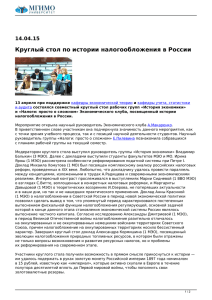
Рис. 1. Структурная схема АСР с автонастройкой.
Регулируемой переменной PV является температура нагревателя,
измеряемая термопреобразователем сопротивления типа НСХ 50М.
Воздействие MV на Объект осуществляется изменением напряжения
питания нагревателя с помощью ИМ серии МЭО и регулируемого
автотрансформатора типа ЛАТР.
Модуль Рег формирует расчетное регулирующее воздействие Yreg;
МУМ – модуль управления ИМ, служит для формирования командных
сигналов Z (Меньше/Стоп/Больше), под действием которых производится
включение/отключение ИМ и реализуется расчетное приращение
воздействия на Объект; Ф – фильтр, предназначен для сглаживания
пульсаций сигнала PV ; П – переключатель для выбора режима: АНР или
Раб (работа регулятора); МВ1 и МВ2 – модули вычислительные.
Модуль Рег совместно с ИМ и модулем МУМ реализуют
приближенно ПИД-закон, который здесь описывается следующей
передаточной функцией:
1
1
Wr (s ) K r 1
Td s
Wr ( s, K r , Ti , ) ,
2
(T f s 1)
Ti s
(1)
где Kr – коэффициент пропорциональности; Ti и Td – постоянные времени
интегрирования и дифференцирования; Td / Ti , т.е. Td Ti ; Tf = Td/8 =
αTi/8 – постоянная времени фильтра при Д-составляющей. В модуле Рег
дифференцируется только регулируемая переменная PV (без SP), а вместо
Kr используется Xp=100/Kr – полоса пропорциональности.
Для АНР используется алгоритм, применяемый, в частности, в
контроллерах «Овен» (вариант АНР-2) и основанный на методических
разработках кафедры АСУТП МЭИ. Его можно отнести к классу
аналитических алгоритмов настройки с расчетом параметров регулятора
по математической модели объекта.
Для получения модели объекта выполняется активный эксперимент,
предусматривающий возбуждение незатухающих автоколебаний в системе
за счет ее перевода в режим двухпозиционного регулирования. В режиме
5
АНР вместо регулятора включается релейный элемент РЭ, с помощью
которого в системе возбуждаются автоколебания. РЭ имеет
двухпозиционную характеристику с гистерезисом (зоной возврата):
eсли E > Esr, то Yre = Ymax;
иначе: eсли E < - Esr, то Yre =Ymin;
(2)
иначе: сохраняется предыдущее значение Yre,
где Esr – порог срабатывания РЭ; E и Yre – сигналы на входе и выходе РЭ.
В модуле МВ1 по данным измерения переменных PV и MV
определяются за последний период колебаний Ton – время включения; Toff –
время выключения; Tk – период колебаний и частота ωk=2π/Tk; Apv –
амплитуда колебаний переменной PV (для первой гармоники); PVср –
среднее значение переменной PV; MVср – среднее значение переменной
MV; Rob.k и Fob.k – модуль и аргумент вектора КЧХ объекта.
Затем определяются параметры математической модели объекта, для
которой используется передаточная функция следующего вида:
W м ( s)
K ob exp( s )
K ob exp( T1 s )
,
T 1 s 1 T 2 s 1 T 1 s 1 b T 1 s 1
(3)
где = / T1; b = T2 / T1.
(4)
Параметры модели {Kob, , T1, b} определяются в частотной области
из условия совпадения аргументов и модулей векторов КЧХ объекта и его
модели при частоте автоколебаний ωk и при ω = 0 (при t ):
K ob PVср PV _ 0 /( MVср MV _ 0);
(5)
Fob. k x arctg ( x) arctg ( x b);
(6)
Rob.k K ob / ( x 2 1) ( x 2 b 2 1) ,
(7)
где
xk T1 k ,
(8)
MV_0 – минимальный уровень выхода РЭ; здесь MV_0 =0; PV_0 – значение
переменной PV при MV=0 в статике (параметр ввода). Параметр b при
решении системы уравнений (5)-(7) фиксируется. По умолчанию задается
b = 10. Остальные три параметра модели объекта {Kob, , T1} определяются
решением указанной системы трех уравнений. Предусмотрена
корректировка значения b по результатам расчета параметра β, если
значение β выходит за допустимые пределы.
В МВ2 по модели объекта (3) определяются параметры регулятора
(1): Xp, Ti, Td (первое приближение к оптимуму). При расчете оптимума
используются косвенные условия оптимальности, представляющие собой
требования к КЧХ системы в виде равенств:
Rzs( ) Rzs.op ;
(9)
Fzs ( ) Fzs.op ;
(10)
T / Ti 2 /( Ti ) TTi.op .
(11)
6
Здесь: Rzs( ) | Wzs ( j ) | и Fzs ( ) arg[Wzs ( j )] - модуль и аргумент вектора
КЧХ замкнутой системы по каналу задания;
Wrs ( j )
1 Wrs ( j )
Wrs ( j ) Wr ( j , Kr , Ti, ) W м ( j )
Wzs ( j )
(12);
(13);
Rzs.op , Fzs.op , TTi.op - заданные значения косвенных показателей.
Значения Rzs.op , Fzs.op определяют координаты контрольной точки в
плоскости КЧХ замкнутой системы Wzs ( j ) в окрестности её резонансной
частоты. Выполнение условий (9) и (10) обеспечивает приближенно
заданное значение частотного показателя колебательности и в конечном
счете - желаемую степень затухания ψ свободных колебаний замкнутой
системы. В программе АНР принято: Rzs.op 1.3 ; Fzs.op 70 º.
Параметр TTi.op влияет на соотношение между интегральной и
пропорциональной составляющими закона регулирования. Действительно,
∆μи / ∆μи = 1/ (ω∙Ti)= (T/Ti)/2π. Варьируя значение TTi.op , можно выбирать
положение рабочей точки на границе заданного затухания с учетом
конкретных требований к качеству процессов регулирования.
Значения параметров α = Td/Ti и TTi.op в алгоритме АНР вычисляются
в зависимости от параметров модели объекта {b=T2/T1; β=τ/T1}. В
частности, для b=10 и β=0.5 (что близко к параметрам объекта учебного
стенда) получаются: α=0.12 и TTi.op =1.6. Принятые значения косвенных
показателей оптимальности должны обеспечивать степень затухания не
ниже ψ = 0.95 и перерегулирование не более 20% при изменении задания.
Оптимальные параметры регулятора, а также частота ω находятся
решением системы (9)-(11) с учетом (12) и (13) сразу после расчета
параметров модели объекта. Достоинством расчета по косвенным
показателям оптимальности
является отсутствие процедур поиска
экстремума. Это обеспечивает выполнение расчетов в течение одного
цикла опроса входов и возможность реализации в рабочем алгоритме
регулятора. Также этот метод применим для регуляторов со сложной
структурой, например, для ПИД с фильтром второго порядка при Дсоставляющей. Кроме того, здесь удобно влиять на форму процесса
регулирования с учетом конкретных требований путем корректировки
заданных значений косвенных показателей оптимальности.
3. ОПИСАНИЕ ПРОГРАММЫ ДЛЯ СИСТЕМЫ С АНР
Реализация рассмотренного алгоритма ПИД-регулятора с АНР
имеется в составе программной среды CoDeSys в библиотеке PidReg2 для
контроллеров серии ПЛК разработки «Овен», а также в ряде контроллеров
7
с жесткой структурой (ТРМ-101 и др). Здесь рассматривается его
применение с ПЛК150 и ИМ типа МЭО.
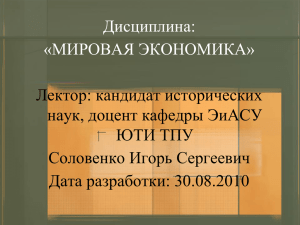
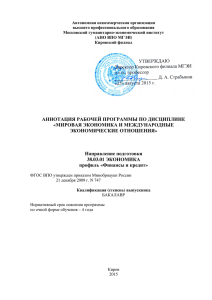
Фрагменты программы на языке FBD приведены на рис.2
(переменные) и рис.3 (реализация). Визуализация приведена на рис.4.
Рис. 2. Фрагмент программы регулятора с АНР. Описание переменных.
Основным элементом программы является функциональный блок
(ФБ) APID_VALVE с именем экземпляра «p», который реализует как
ПИД-алгоритм с ИМ постоянной скорости, так и алгоритм его
автонастройки (АНР-2). ФБ SET_APID_VALVE служит для ввода или
получения значений параметров блока «p» по его адресу.
Информация о регулируемой переменной подается по конфигурации
ПЛК150 к блоку «p» на вход Pv (температура нагревателя) и на вход
Pv_Time (время измерения). Сигнал задания подается на вход SP блока «p»
от окна индикации с функцией ввода «Задание SP».
Установка режима управления (Руч/Авт) производится по входу
Y_MAN_SET с помощью виртуального переключателя «Руч». Желаемое
положение МЭО в режиме «Руч» задается по входу «Y_MANUAL» в
8
диапазоне 0-1 из окна визуализации «Выход Руч» (переменная y_man). В
режиме «Руч» эта переменная повторяет выход регулятора (цепь 0004).
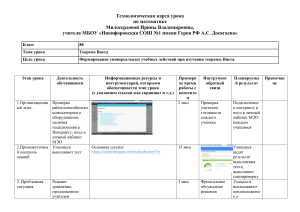
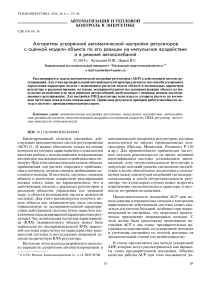
Рис. 3. Реализация программы АСР с автонастройкой регулятора.
9
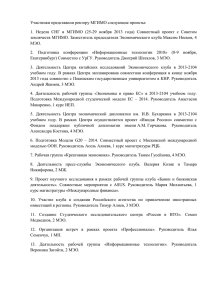
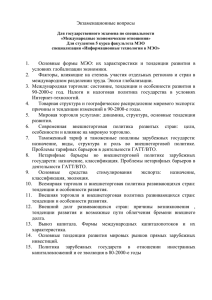
Рис. 4. Визуализация программы с элементами оперативного управления и
графиками процессов для режима АНР и при испытании системы
Для включения – выключения режима АНР используется вход
START_ANR блока «p», на который подается логическая переменная
go_anr, формируемая с помощью цепи 0002 от RS-триггера «anr_tr». Пуск
производится сигналом start_anr от кнопки «Пуск АНР». Штатный останов
режима АНР по его завершении производится сигналом ANR_WORK от
блока «p» по его переднему фронту с помощью элемента F_TRIG, а
принудительный останов – сигналом stop_anr от кнопки «Стоп АНР».
4. ПОРЯДОК ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
Исходное состояние: тумблер стенда «ШИМ-МЭО» - в положении
«ШИМ», а тумблер «АВТ-РУЧ» - в положении «РУЧ».
Задание 1. Изучение стенда и программы
Выполняется при подготовке к работе с использованием описаний к
настоящей работе и работам 1 и 4.
Задание 2. Конфигурирование контроллера
2.1. Скопировать в свою папку файл проекта «PID_Valve_ANR_2.pro» и
запустить его. Вызвать «Ресурсы\Конфигурация ПЛК», проверить и
записать данные привязки входов и выходов контроллера к переменным:
дискретные выходы: 1- sm_less (сигнал Меньше); 2 – sm_more (Больше);
10
аналоговые входы: 1- RTD sensor, type r428_50, PV(*Value*), PV_time
(*Circular time*); 3 – Unifed signal, type U0_1, MV (*Value*).
2.2. Вызвать вкладку «Визуализации\v1», проверить и записать привязку к
переменным виртуальных элементов вывода и ввода данных (рис.4),
например, «Выход МЭО» - .MV; «Выход р-ра»- PLC_PRG.y_reg и т.д.
2.3. В поле графика кликнуть правой кнопкой «мыши», выбрать далее
«Конфигурировать\Тренд\Выбор переменной». Необходимо вывести на
график переменные sp, pv, mv, y_reg. Записать их полные данные.
Параметры вертикальной оси: шкала - 0…120; шаг - 10; горизонтальной
оси: длительность – 20 m; деления – 1 m; подписи – 2 m; дискретность – 1с.
В поле «Регистрация» выбрать «История», войти в ее настройку, указать
директорию и имя файла для архива данных.
2.4. Откомпилировать проект, указать параметры связи компьютера с
контроллером (меню Онлайн), выполнить подключение и пуск программы.
2.5. Вызвать вкладку «Визуализации\v1» и ввести значение PV_0: если
нагреватель длительное время был выключен (более 30 мин), то в качестве
PV_0 ввести значение переменной PV по индикатору «Объект PV»; если
нагреватель не успел остыть, то можно использовать показания настенного
термометра или оставить по умолчанию PV_0 = 25 (ºС).
Задание 3. Измерение времени полного хода механизма МЭО
3.1. Вызвать «Визуализации\v1» и установить режим «Руч».
3.2. Тумблер стенда «ШИМ-МЭО» установить в состояние «МЭО», а
тумблер «Авт-Руч» - в положение «Авт».
3.3. Создать верхнее крайнее положение МЭО с помощью оперативных
средств визуализации. Для этого в окне «Выход Руч» ввести 1 и
контролировать работу МЭО до срабатывания концевого выключателя
«Больше». Индикация «Выход МЭО» должна стать близкой к 100 %.
3.2. Сделать выдержку времени 10-15 с, после чего приступить к
определению параметра Тм - времени полного хода МЭО. Для этого: в
окне «Выход Руч» ввести нижнее крайнее значение (0) и по секундомеру
измерить время работы МЭО при движении от исходного до нового
крайнего положения, т.е. до срабатывания концевого выключателя
«Меньше». Индикация «Выход МЭО» должна стать близкой к 0.
3.3. Ввести полученное значение параметра Тм в окно визуализации.
Задание 4. Настройка регулятора с использованием функции АНР
Исходное состояние (по визуализации): виртуальный переключатель
режима управления в состоянии «Руч», «Выход Руч» = 0; «Выход МЭО» =
0 (+/- 1). Состояние объекта близко к стационарному.
4.1. В окно «Задание SP» ввести 90.
11
4.2. Подать команду «Пуск АНР» кликом одноименной кнопки и отменить
режим Руч: индикатор активности АНР должен загореться, а индикатор
Руч - погаснуть. МЭО должен включиться, отрабатывая сигнал управления
от РЭ узла возбуждения автоколебаний в соответствии с алгоритмом АНР
и характеристикой (2).
4.3. Наблюдать за ходом АНР: должно получиться два полных периода
колебаний, как это показано на рис.4 (участок 1), после чего режим АНР
должен завершиться с индикацией рассчитанных значений параметров
регулятора (Xp, Ti, Td), а система должна перейти в режим ПИДрегулирования с этими параметрами.
Задание 5. Испытания системы регулирования
5.1. Испытания АСР при настройке, полученной по данным АНР.
5.1.1. При достижении стационарного состояния изменить задание
SP: SP = 90 95 (ºС).
Наблюдать за переходом объекта на новое задание (см. участок 2, рис.4).
5.1.2. При достижении стационарного состояния нанести
возмущение регулирующим органом с помощью оперативных средств
визуализации:
- установить режим «Руч» виртуальным переключателем;
- в окно «Выход Руч» ввести число, отличающееся от текущего на 0.3,
например, «Выход Руч» = 0.58 0.88;
- после создания возмущения (остановки МЭО) отменить «Руч» и
наблюдать за процессом авторегулирования (участок 3, рис.4).
5.2. Испытания АСР при настройке, отличной от данных АНР.
5.2.1. Изменить параметр Ti относительно данных АНР, например,
ввести Ti = (Ti)anr 0.7 и выполнить испытания аналогично п. 5.1.1 и 5.1.2.
Изменение SP можно сделать в обратном направлении (SP = 95 90).
5.2.1. Изменить параметр Xp относительно данных АНР, например,
ввести Xp = (Xp)anr 0.7 и выполнить испытания аналогично п. 5.1.1 и 5.1.2.
Примечание. Для полученных процессов сохранить копию экрана.
Задание 6. Обработка графиков полученных процессов
При сохранении графиков в виде копии экрана в редакторе Paint их
обработку можно сделать в нем же. На графиках указать режим работы на
отдельных участках, параметры регулятора и возмущающих воздействий.
5. СОДЕРЖАНИЕ ОТЧЕТА ПО ЛАБОРАТОРНОЙ РАБОТЕ
1. Титульный лист, цель работы.
2. Краткая схема экспериментальной установки и структуры АСР.
3. Краткое описание алгоритма АНР и программы контроллера.
12
4. Данные конфигурирования контроллера (привязка входов-выходов).
5. Данные экспериментов при выполнении АНР и испытаниях системы. 6.
6. Оценка эффективности АНР на основе анализа испытаний.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Каким требованиям должна отвечать настройка АСР?
2. Для чего и каким путем возбуждаются автоколебания в ходе АНР?
3. Каким образом определяется модель объекта в алгоритме АНР?
4. Каким образом определяется настройка регулятора в алгоритме АНР?
5. Как производится пуск и останов АНР c блоком APID_VALVE?
6. Каким путем реализуется ручное управление механизмом МЭО
средствами визуализации при использовании ПЛК150?
7. Как производится привязка входов и выходов контроллера ПЛК150 в
АСР с электронагревателем и механизмом МЭО?
8. Каким путем при работе с механизмом постоянной скорости типа МЭО
можно реализовать регулирующее воздействие, рассчитанное линейным
алгоритмом регулирования?
9. Каким образом обеспечивается безударность переключения с
автоматического на ручной режим управления?
10. Какие факторы следует учитывать при установке минимальной
длительности импульса в системе с механизмами типа МЭО?
7. СПИСОК ЛИТЕРАТУРЫ
1. Петров И. В. Программируемые контроллеры. Стандартные языки и
приемы прикладного программирования. – М.: Солон-Пресс, 2007.
2. Андрюшин А.В., Сабанин В.Р., Смирнов Н.И. Инноватика и
управление в теплоэнергетике. – Учебник. М.: Изд. дом МЭИ, 2011.
3. Ротач В.Я. Теория автоматического управления. – Учебник. М.: Изд.
дом МЭИ, 2004, 2008.