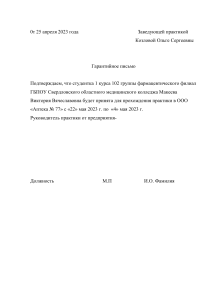
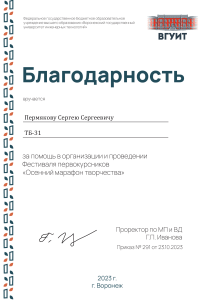
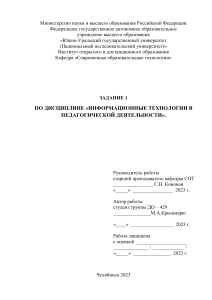
Космическая робототехника: состояние и перспективы развития (межфакультетский курс) Сохин Игорь Георгиевич д.т.н., действительный член российской академии космонавтики им. К.Э. Циолковского 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 1 ЛЕКЦИЯ №2. ОБЗОР СУЩЕСТВУЮЩИХ КОСМИЧЕСКИХ РОБОТОВ И ОПЫТА ИХ ПРИМЕНЕНИЯ Рассматриваемые вопросы: 1. Категории космических роботов. 2. Автоматические межпланетные станции (АМС) и напланетные мобильные роботы (планетоходы). 3. Орбитальные сервисные роботы. 4. Антропоморфные роботы. 5. Роботы-ассистенты (неантропоморфные) для поддержки деятельности космонавтов. 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 2 ОСНОВНЫЕ ТЕРМИНЫ космический аппарат, космический робот, напланетный робот, сервисный робот, антропоморфный робот, телеуправляемый робот, робот-ассистент, роботизированная система, робототехнический комплекс, автоматическая межпланетная станция, автоматический космический аппарат, пилотируемый космический аппарат, искусственный спутник Земли, международная космическая станция 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 3 КАТЕГОРИИ КОСМИЧЕСКИХ РОБОТОВ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 4 РАССМАТРИВАЕМЫЕ КАТЕГОРИИ КОСМИЧЕСКИХ РОБОТОВ Рассматриваемые категории космических роботов: 22.02.2023 • автоматические межпланетные станции • напланетные мобильные роботы (планетоходы) • орбитальные сервисные роботы • антропоморфные роботы • роботы-ассистенты (неантропоморфные) для поддержки деятельности космонавтов Лекция №2. Обзор существующих КР и опыта их применения 5 АВТОМАТИЧЕСКИЕ МЕЖПЛАНЕТНЫЕ СТАНЦИИ И ПЛАНЕТОХОДЫ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 6 ОСНОВНЫЕ МИССИИ ИССЛЕДОВАНИЯ ЛУНЫ 2.01.1959 – Луна-1 (СССР) впервые отправилась к Луне, набор 2-й космической скорости 14.09.1959 - Луна-2 (СССР) первая жесткая посадка 30.05.1966 – Луна-9 (СССР) первая мягкая посадка на Луну 02.06.1966 – Сервейер-1 (США) мягкая посадка на Луну 22.05.1969 – Аполлон-10 (США) первый полет человека к Луне (без высадки на поверхность) 20.07.1969 – Аполлон-11 человека на Луне (США) первая высадка 20.09.1970 - Луна-16 (СССР) доставка лунного грунта 1970 – Луна-17 (СССР), Луноход-1 - первый в истории роботизированный планетоход 1971 – Аполлон-15 (США) лунный ровер 2006 - АМС Смарт-1 (ЕКА) 2008 – зонд Чандраян-1 (Индия) жесткая посадка 2009 –АМС Кагуя (Япония) орбита Луны 2013 – АМС Чанъэ, луноход Юйту (Китай) 2019 - луноход Юйту-2 (Китай) 2019 - АМС Чандраян-2 (Индия) мягкая посадка 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 7 АМС «ЛУНА-9» «Луна-9» (1966 г.) – первая лунная АМС (СССР) Состав и технические характеристики: Разгонный блок + СА: масса - 1538 кг, размер – 2,7 м Спускаемый аппарат с АМС: масса 100 кг, диаметр – 58 см Результаты: 22.02.2023 • первая в мире мягкая посадка космического аппарата на поверхность Луны • передача на Землю первых телепанорам лунной поверхности Лекция №2. Обзор существующих КР и опыта их применения 8 АМС «ЛУНА-16» АМС «Луна-16» (СССР, 1970 г.) – первый робот, доставивший лунный грунт на Землю Состав и технические характеристики: Посадочная ступень Ракета «Луна-Земля» Возвращаемый аппарат: масса 35 кг Результаты: Впервые в мире была решена сложная роботизированная задача – осуществлен беспилотный полет по маршруту «Земля–Луна–Земля» и доставлены на Землю образцы инопланетного вещества 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 9 ЛУНОХОД-1 «Луноход-1» (СССР, 1970 г.) – первый автономный робот-планетоход «Луноход-2» (СССР, 1973 г.) Технические характеристики: Масса: 756 кг Размеры ДхШхВ: 4,42х2,15х1,92 м Макс скорость: 2 км/час Результаты: Длительность существования: 301 сут. Пробег: 9,9 км Передал на Землю: 211 панорам , 25000 фотографий Луны 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 10 ЛУННЫЙ РОВЕР ПРОГРАММЫ «АПОЛЛОН» Американский лунный ровер программы «Аполлон»: Lunar Roving Vehicle (LRV) Использование: экспедиции «Апполон-15»(1971г.), «Апполон-16»(1972 г.), «Апполон-17»(1972 г.) Технические характеристики: Масса: 210 кг Грузоподъёмность: 490 кг Размеры ДхШхВ: 3х2,3х1,1 м Скорость: макс 18 км/час, средняя – 8-10 км/час Управление: ручное Результаты: «Апполон-15»: пробег 27,8 км «Апполон-16»: пробег 27,1 км «Апполон-17»: пробег 35,74 км 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 11 КИТАЙСКАЯ АМС «ЧАНЪЭ-5» «Чанъэ-5» (2020) китайская автоматическая миссия по возвращению на Землю лунных образцов Состав АМС: • • • • Посадочный модуль (1200 кг) Взлетный модуль Орбитальный модуль Спускаемый аппарат (500 кг) Результаты: • • Доставка на Землю лунного грунта (1731 г) Первая автоматическая стыковка на лунной орбите Взлетно-посадочный модуль + орбитальный аппарат «Чанъе-5» 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 12 УСПЕШНЫЕ МИССИИ ИССЛЕДОВАНИЯ ВЕНЕРЫ 12.02.1961 – Венера-1 (СССР) первый пролет на расстоянии 100 000 км 1962 - Маринер-2 (СШ\А) пролет на 35 000 км 18.10.1967 - Венера-4 (СССР) первый успешный вход в атмосферу 1969 - Венера-5/6 (СССР) вход в атмосферу, работа 53/51 мин 1970 - Венера-7 (СССР) первая мягкая посадка 1973 – Маринер-10 (США) облет 1975 - Венера-9 (СССР) первый орбитальный КА + успешная посадка спускаемого аппарата 22.02.2023 1978 – Пионер Венеры-1 (США) орбитальный полет 1984 – Вега-1/2 (СССР) облет/атмосфера/посадка 2006 – Венера Экспресс (ЕКА) орбитальный полет 2010 – Акацуки (Япония) орбитальный солнечный парус Икарос – облет Венеры 2018 – Солнечный зонд гравитационный ассистент проходе) полет, Parker (США) – (наблюдение при 2018 – БелиКоломбо (ЕКА) – гравитационный ассистент (наблюдение при проходе) 2020 – Солнечный орбитальный аппарат (ЕКА) – гравитационный ассистент Лекция №2. Обзор существующих КР и опыта их применения 13 УСПЕШНЫЕ МИССИИ ИССЛЕДОВАНИЯ МАРСА 24.11.1971 – орбита Марса АМС Mariner-9 (США) 2007 – орбита Марса АМС Феникс (США) 2.12.1971 - первый марсоход ПрОП-М (СССР) 2012 - марсоход Curiosity (США) 1975 - посадка Viking-1 и Viking-2 (США) 2014 - орбита Марса АМС Maven (США) 1988 – орбита Марса Фобос-2 (СССР) 2014 – орбита Марса Мангалъян (Индия) 1996 - орбита Марса АМС Mars Global Surveyor (США) 2018 - орбита Марса АМС Trace Gas Orbiter (ЕКА, Россия) 1996 - марсоход Sojourner (США) 2003 - орбита Марса АМС Марс-экспресс (ЕКА) 2004 - марсоходы Opportunity , Spirit (США) 2006 - орбита Марса АМС Mars Reconnaisance Orbiter (США) 22.02.2023 2021 - марсоход Perseverance и вертолет Ingenuity (США) 2021 - орбита Марса АМС Аль-Амаль (ОАЭ) 2021 - орбита Марса АМС «Тянъвень-1», марсоход «Чунжун» (Китай) Лекция №2. Обзор существующих КР и опыта их применения 14 ТЕКУЩЕЕ СОСТОЯНИЕ МАРСИАНСКИХ ИССЛЕДОВАНИЙ АКА на орбитах вокруг Марса: 22.02.2023 АМС и планетоходы на поверхности Марса: Лекция №2. Обзор существующих КР и опыта их применения 15 ПЕРВЫЙ МАРСОХОД Прибор оценки проходимости - ПрОП-М (СССР, 1971) - первый в мире марсоход в составе АМС «Марс-3» Характеристики: • • • • Масса 4,5 кг Размеры 25х22х4 см Управление от АМС по 15-метр кабелю Скорость 1 м/с Результаты: • • 22.02.2023 Первая в мире мягкая посадка на поверхность Марса Передача данных на Землю (14,5 сек) Лекция №2. Обзор существующих КР и опыта их применения 16 МАРСОХОД SOJOURNER (ВИЗИТЁР) Sojourner (Визитёр) (США, 1996) - марсоход в составе АМС «Mars Pathfinder» Характеристики: • • • Масса 11,5 кг Солнечная батарея 15 Вт Управление ручное с Земли Результаты: • • • 22.02.2023 Продолжительность миссии 83 марсианских дня Дистанция 100 м Передача на Землю 550 фото Лекция №2. Обзор существующих КР и опыта их применения 17 МАРСОХОД PERSEVERANCE (НАСТОЙЧИВОСТЬ) Perseverance (Настойчивость) (США, 2021) – марсоход, посадка на Марс 18.02.2021 Характеристики: • Масса 1025 кг • Размеры 2,9х2,7х2,2 • Мощность 110 Вт (радиоизотопный генератор) Полезная нагрузка: • Манипулятор для забора грунта • 7 приборов анализа среды Марса • 19 цифровых камер, 2 микрофона Результаты (на 30.12.2022): 22.02.2023 • Продолжительность: более 2 лет • Дистанция 12,56 км Лекция №2. Обзор существующих КР и опыта их применения 18 ПЛАНЕТОЛЕТ INGENUITY («ИЗОБРЕТАТЕЛЬНОСТЬ») Ingenuity («Изобретательность») автономный роботизированный разряженной атмосфере Марса вертолет (США, 2021) для полетов Характеристики: • Масса 1,8 кг Результаты: • 22.02.2023 Совершил 40 успешных полетов Лекция №2. Обзор существующих КР и опыта их применения 19 – в НОВАЯ ТЕХНОЛОГИЯ ПОСАДКИ: ВИЗУАЛЬНАЯ НАВИГАЦИЯ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 20 ОРБИТАЛЬНЫЕ СЕРВИСНЫЕ РОБОТЫ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 21 РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР SPACE SHUTTLE «CANADARM1» Canadarm1 (Shuttle Remote манипулятор Space Shuttle Manipulator System, SRMS) Назначение: • Захват и манипулирования полезными грузами • Ремонт спутников • Перемещение астронавтов при ВКД • Внешний осмотр корабля или ПГ Характеристики: • • • 22.02.2023 Масса 400 кг Длина 15 м Грузоподъемность 30 000 кг Лекция №2. Обзор существующих КР и опыта их применения 22 «АИСТ» - РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР МНОГОРАЗОВОГО КОРАБЛЯ «БУРАН» АИСТ - манипулятор советского многоразового корабля «Буран» Назначение: • Захват и манипулирования полезными грузами • Ремонт спутников • Перемещение астронавтов при ВКД • Внешний осмотр корабля или ПГ Характеристики: • • • 22.02.2023 Масса 400 кг Длина 15,5 м Грузоподъемность 30 000 кг Лекция №2. Обзор существующих КР и опыта их применения 23 MSS (MOBILE SERVICING SYSTEM) АМЕРИКАНСКОГО СЕГМЕНТА МКС MSS (Mobile Servicing System) сегмента МКС - РТС РТС американского Состав: • Canadarm2 - рука-манипулятор • Dextre – двурукий точный манипулятор • MBS - мобильная платформа Характеристики: • • • 22.02.2023 Длина Canadarm2 - 17,6 м Грузоподъемность Canadarm2 - 116 т Длина Dextre - 3,5 м Лекция №2. Обзор существующих КР и опыта их применения 24 JEMRMS (JAPANESE EXPERIMENT MODULE REMOTE MANIPULATOR SYSTEM) – РТК ЯПОНСКОГО МОДУЛЯ МКС JEMRMS (Japanese Experiment Module Remote Manipulator System - управляемая манипуляторная система японского экспериментального модуля). Уменьшенная и упрощенная версия MSS. Состав: 22.02.2023 • Основная рука-манипулятор (Main Arm) • Вспомогательная рука-манипулятор (Small Fine Arm) для выполнения тонких работ Лекция №2. Обзор существующих КР и опыта их применения 25 ERA (EUROPEAN ROBOTIC ARM) – РТС РОССИЙСКОГО СЕГМЕНТА МКС ERA (European Robotic Arm – европейская роботизированная рука, проект ЕКА) робот-манипулятор для сборочных работ и обслуживания РС МКС. Установлен на российском МЛМ «Наука». Характеристики: • • • • 22.02.2023 Масса 1800 кг Длина 11,3 м Грузоподъемность 8 000 кг Точность позиционирования 5 мм Лекция №2. Обзор существующих КР и опыта их применения 26 АНТРОПОМОРФНЫЕ РОБОТЫ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 27 РОБОНАВТ-2 Robonaut-2 (NASA) Назначение: исследование применения АР в космосе возможностей Характеристики: • • • • • 22.02.2023 Масса - 150 кг Рост - 1 м Размах рук – 244 см Степеней подвижности – 42 (кисти рук - 12) Количество сенсоров - 350 Лекция №2. Обзор существующих КР и опыта их применения 28 FEDOR (SKYBOT F-850) – РОССИЙСКИЙ АНТРОПОМОРФНЫЙ РТК FEDOR (Skybot F-850) - российская антропоморфная РТС Назначение: исследование применения АРТС в космосе возможностей Состав АРТС: • робот • ЗУКТ (экзоскелет) • шлем виртуальной реальности • управляющий лэптоп с ПО • коммуникационное оборудование Характеристики: • масса - 106 кг • рост – 1,8 м • режим управления – копирующий 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 29 СОСТАВ АРТК «SKYBOT F-850» Состав АРТК «Skybot F-850»: • робот • ЗУКТ (экзоскелет) • шлем виртуальной реальности • управляющий лэптоп с ПО • коммуникационное оборудование 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 30 ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ РОБОТОМ FEDOR НА БОРТУ МКС 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 31 КИРОБО - ЯПОНСКИЙ РОБОТ ПСИХОЛОГИЧЕСКОЙ ПОДДЕРЖКИ АСТРОНАВТОВ Киробо - японский робот-компаньон астронавтов Назначение: отработка технологий психологической поддержки астронавтов в полете Характеристики: • масса - 1 кг • рост – 34 см • режим управления – автономный 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 32 РОБОТЫ-АССИСТЕНТЫ 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 33 CIMON - ИНТЕРАКТИВНЫЙ РОБОТИЗИРОВАННЫЙ ПОМОЩНИК ЭКИПАЖА CIMON – свободнолетающий интерактивный роботизированный помощник экипажа МКС (DLR, Германия) Назначение: отработка технологий операционной и психологической поддержки астронавтов в полете Характеристики: • масса - 5 кг • диаметр – 32 см • двигатели маневрирования – вентиляторы • Время автономной работы – 2 часа 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 34 SPHERES СВОБОДНОЛЕТАЮЩАЯ РТС ПОДДЕРЖКИ АСТРОНАВТОВ SPHERES (Synchronized Position Hold Engage and Reorient Experimental Satellite) – свободнолетающая роботизированная система поддержки деятельности астронавтов (НАСА, США) Назначение: тестирование отработка технологий операционной и психологической поддержки астронавтов в полете 22.02.2023 Характеристики: • масса – 4,1 кг • диаметр – 21 см • двигатели маневрирования – вентиляторы • Время автономной работы – 2 часа Лекция №2. Обзор существующих КР и опыта их применения 35 ЛИТЕРАТУРА 1. Макаров И. М., Топчеев Ю. И. Робототехника: История и перспективы. — М.: Наука; Изд-во МАИ, 2003. — 349 с. — (Информатика: неограниченные возможности и возможные ограничения). 2. ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012. «Роботы и робототехнические устройства. Термины и определения». 3. ГОСТ Р 53802-2010. Системы и комплексы космические. Термины и определения. 4. Искусственный интеллект в робототехнических системах космического назначения // Искусственный интеллект в космической технике. Состояние. Перспективы применения. Монография / Под ред. А.Н. Балухто. – М.: Радиотехника, 2021. с.237-316. 5. Белоножко П.П. Космическая робототехника. Современное состояние, перспективные задачи, тенденции развития. Аналитический обзор. / Наука и Образование. МГТУ им. Н.Э.Баумана. Электрон. журн. 2016. №2. С. 110-153. 6. Алексеев В.И. Робототехника в космосе: история и перспективы развития. [Электронный ресурс]. – URL:https://vestnikrosnou.ru/sites/default/files/40_Сложные%20системы%20№%203.pdf. 7. Эволюция планетоходов от «Лунохода» до Curiosity. [Электронный URL:http://budconcept.ru/tekhnologii/tekhnologii_v_kosmose/evolyutsiya-planetohodov-ot-lunohoda.html. 8. Освоение Вселенной. Планетоходы. Прошлое, настоящее, будущее. [Электронный ресурс]. – URL: https://vk.com/@-170084994osvoenie-vselennoi-planetohody-proshloe-nastoyaschee-budusch. 9. «Луноходы-1 и -2» в истории лунных исследований. К 50-летию первого запуска планетохода. / «Природа» №2, 2021. 10. NASA Science. Mars Exploration Program. [Электронный ресурс]. exploration/missions/?page=0&per_page=99&order=date+desc&search=&category=170. – ресурс]. – URL:https://mars.nasa.gov/mars- 11. А.Ф. Пермяков, Е.А. Дудоров, И.Г. Сохин, А.А. Шпонько. Подготовка и проведение космического эксперимента с применением антропоморфного робота «Федор»//Известия высших учебных заведений. Северокавказский регион. Технические науки. №3 (207), 2020 г., с. 64-72. 22.02.2023 Лекция №2. Обзор существующих КР и опыта их применения 36