Теория
1. Расстояние между двумя точками
Существует три вида системы координат
Ось 𝑂𝑥
Плоскость 𝑂𝑥𝑦
Пространство 𝑂𝑥𝑦𝑧
Расстояние между двумя точками для трех случаях можно найти как:
1) На прямой (оси 𝑂𝑥 или просто оси 𝑥) 𝑀1 𝑀2 = |𝑥2 − 𝑥1 |, где 𝑀1 (𝑥1 ) и 𝑀2 (𝑥2 ) точки на оси. Расстояние от начала
координат до точки находится как 𝑂𝑀 = |𝑥|.
2) На плоскости 𝑂𝑥𝑦 𝑀1 𝑀2 = √(𝑥2 − 𝑥1 )2 + (𝑦2 − 𝑦1 )2 , где 𝑀1 (𝑥1 , 𝑦1 ) и 𝑀2 (𝑥2 , 𝑦2 ) точки на плоскости. Расстояние от
начала координат до точки находится как 𝑂𝑀 = √𝑥 2 + 𝑦 2 .
3) В пространстве 𝑂𝑥𝑦𝑧 𝑀1 𝑀2 = √(𝑥2 − 𝑥1 )2 + (𝑦2 − 𝑦1 )2 + (𝑧2 − 𝑧1 )2 , где 𝑀1 (𝑥1 , 𝑦1 , 𝑧1 ) и 𝑀2 (𝑥2 , 𝑦2 , 𝑧2 ) точки на
плоскости. Расстояние от начала координат до точки находится как 𝑂𝑀 = √𝑥 2 + 𝑦 2 + 𝑧 2 .
2. Деление отрезка в данном отношении
Если через точки 𝐴(𝑥𝐴 , 𝑦𝐴 ) и 𝐶(𝑥𝐶 , 𝑦𝐶 ) провести прямую
𝐴𝐶, а точка В будет серединой это отрезка, т.е. АВ = ВС.
Тогда координаты точки В можно найти как
𝑥𝐴 + 𝑥𝐶
𝑦𝐴 + 𝑦𝐶
𝑧𝐴 + 𝑧𝐶
𝑥𝐵 =
; 𝑦𝐵 =
; 𝑧𝐵 =
2
2
2
Если через точки 𝐴(𝑥𝐴 , 𝑦𝐴 ) и 𝐶(𝑥𝐶 , 𝑦𝐶 ) провести прямую
𝐴𝐶, а точка В будет делить отрезка в каком-то
𝐵𝐶
соотношении
= 𝜆. Тогда координаты точки В можно
𝐴𝐵
найти как
𝑥𝐴 + 𝜆𝑥𝐶
𝑦𝐴 + 𝜆𝑦𝐶
𝑧𝐴 + 𝜆𝑧𝐶
𝑥𝐵 =
; 𝑦𝐵 =
; 𝑧𝐵 =
1+𝜆
1+𝜆
1+𝜆
3. Уравнение линии в прямоугольных координатах.
(Упорядоченная) пара чисел (𝑥0 , 𝑦0 ) называется решением уравнения 𝐹(𝑥, 𝑦) = 0, если при подстановке в уравнение
𝑥0 вместо 𝑥 и 𝑦0 вместо 𝑦 получается верное числовое равенство. При этом говорят, что числа 𝑥0 , 𝑦0 удовлетворяют этому
уравнению.
Уравнение 𝐹(𝑥, 𝑦) = 0 называется уравнением данной линии на плоскости 𝑥𝑦, если эта линия есть множество всех
точек (геометрическое место точек) этой плоскости, координаты которых удовлетворяют этому уравнению.
Иногда из уравнения 𝐹(𝑥, 𝑦) = 0 можно y явно выразить через x (однозначно). В результате получается уравнение
𝑦 = 𝑓(𝑥).
𝑦 = 𝑓(𝑥) – явное уравнение линии на плоскости 𝑥𝑦 (уравнение графика функции 𝑓).
𝐹(𝑥, 𝑦) = 0 – неявное уравнение линии на плоскости 𝑥𝑦.
4. Полярные координаты. Уравнение линии в полярных координатах
Полярная система координат на плоскости задается некоторой точкой 𝑂 этой плоскости (называемой полюсом) и
исходящим из нее лучом (называемым полярной осью). Предполагается, что для измерения длин на плоскости выбран
единичный отрезок и что выбрано положительное направление вращения на плоскости против часовой стрелки.
Полярными координатами точки 𝑀 называются: 𝑟 – длина отрезка 𝑂𝑀 (полярный радиус), – угол, на который нужно
повернуть полярную ось, чтобы она совпала с лучом 𝑂𝑀 (полярный угол).
Для полюса 𝑂: 𝑟 = 0, а полярный угол не определен. Для точки 𝑀𝑂: 𝑟0, а полярный угол определен
неоднозначно. Он имеет бесконечно много значений, общий вид которых: + 2𝑛 (𝑛 ∈ ℤ), где – одно из его значений
(любое). Значение полярного угла, удовлетворяющее условию 0 ≤ < 2, называется главным.
Если на плоскости заданы прямоугольная система координат и полярная, причем полюс совпадает с началом
координат, а полярная ось – с положительной полуосью абсцисс, то для любой точки 𝑀𝑂 ее прямоугольные координаты
𝑥𝑦, и полярные координаты 𝑟, связаны между собой формулами
𝑦
𝑥 = 𝑟𝑐𝑜𝑠𝜑, 𝑦 = 𝑟𝑠𝑖𝑛𝜑 𝑟 = √𝑥 2 + 𝑦 2 , 𝑡𝑔𝜑 =
𝑥
Уравнение линии в полярной системе координат имеет вид 𝐹(𝑟, ) = 0 или 𝑟 = 𝑓(). Координатную сеть образуют
окружности с центром в полюсе (𝑟 = 𝑎, 𝑎 > 0) и лучи с вершиной в полюсе (𝜑 = 𝑏, 𝑏 ∈ ℝ).
5. Параметрические уравнения линии.
Уравнения
𝑥 = 𝜑(𝑡),
𝑦 = 𝜓(𝑡)
(𝑡 ∈ 𝐼)
где 𝐼 – промежуток, называются параметрическими уравнениями данной линии на плоскости 𝑥𝑦, если эта линия есть
множество всех точек этой плоскости, координаты 𝑥𝑦, каждой из которых вычисляются по формулам при некотором 𝑡𝐼
(другими словами, если точка 𝑀 (𝜑(𝑡), 𝜓 (𝑡)) “пробегает” эту линию, когда 𝑡 “пробегает” 𝐼). Переменная 𝑡 называется
при этом параметром. Линия, заданная параметрическими уравнениями, называется параметризованной. Аналогично
определяются параметрические уравнения линии в пространстве 𝑥𝑦𝑧: к двум уравнениям (3) добавляется третье 𝑧 = (𝑡).
В механике уравнения называются уравнениями движения точки 𝑀 (𝑡 – время). Они определяют закон движения
точки 𝑀. Они же определяют траекторию точки 𝑀 и являются параметрическими уравнениями этой траектории. Обратно,
на произвольную параметризованную линию можно смотреть как на траекторию точки 𝑀 при ее движении по закону,
если такое движение возможно.
6. Определители второго и третьего порядков
Квадратная таблица в виде
(1)
из четырех чисел называется квадратной матрицей второго порядка. Числа 𝑎𝑖𝑗 называются ее элементами. Элементы 𝑎11
и 𝑎12 образуют первую строку, 𝑎21 и 𝑎22 – вторую строку, 𝑎11 и 𝑎21 – первый столбец, 𝑎12 и 𝑎22 – второй столбец, 𝑎11 и
𝑎22 – главную диагональ, 𝑎12 и 𝑎21 – побочную диагональ этой матрицы. Если в матрице (1) строки записать по столбцам,
𝑎11 𝑎12
то получится матрица (𝑎
), которая называется транспонированной по отношению к матрице (1). Говорят, что эта
21 𝑎22
матрица получена транспонированием матрицы (1).
Определителем матрицы (1) (или определителем второго порядка) называется число
𝑎11 𝑎12
𝑑𝑒𝑡𝐴 или 𝐴 или ∆= |𝑎
| = 𝑎11 𝑎22 − 𝑎12 𝑎21
21 𝑎22
«Матричная» терминология (элементы, первая строка, ... , транспонирование) используется и для определителей.
Квадратной матрицей третьего порядка называется таблица
𝑎11 𝑎12 𝑎13
(𝑎21 𝑎22 𝑎23 )
𝑎31 𝑎32 𝑎33
(2)
По сравнению с матрицей второго порядка здесь появляются третья строка и третий столбец, а в остальном терминология
и обозначения – те же самые.
Определителем матрицы (2) (или определителем третьего порядка) называется число
𝑎11
𝑑𝑒𝑡𝐴 или 𝐴 или ∆= |𝑎21
𝑎31
𝑎12
𝑎22
𝑎32
𝑎13
𝑎23 | = 𝑎11 𝑎22 𝑎33 + 𝑎12 𝑎23 𝑎31 + 𝑎13 𝑎21 𝑎32 − 𝑎13 𝑎22 𝑎31 − 𝑎12 𝑎21 𝑎33 − 𝑎11 𝑎23 𝑎32
𝑎33
Стоящее справа выражение удобно составлять по правилу треугольников. Слева (справа) указано, перед каким
произведением в формуле стоит «+» («-» ).
Также для того, чтобы найти определитель матрицы можно
воспользоваться правилом разложение по строке или по столбцу. Суть метода
заключается в том, что выбирается одна строка или один столбец. Затем
выбирается элемент и вычеркивается все элементы строки и столбцов, где стоял
выбранный элемент и умножается на определитель меньшей матрицы. Также в
этом способе надо учитывать знак элементов строки или столбца «+» или «-».
Знаки чередуются в шахматной последовательности.
Свойства определителей (они одинаковы для определителей любого порядка):
1) При транспонировании определитель не меняется (теорема о транспонировании). Из этого свойства следует, что
любое утверждение об определителе, выраженное в терминах строк, справедливо и для столбцов (и наоборот). Поэтому
все дальнейшие свойства формулируются только для строк.
2) При перестановке двух строк определитель меняет знак (кососимметричность).
3) Если каждый элемент некоторой строки определителя представлен в виде суммы двух слагаемых, то определитель
равен сумме двух определителей, в каждом из которых элементы соответствующей строки равны соответствующим
слагаемым, а остальные строки – те же, что и в данном определителе.
4) Общий множитель всех элементов одной строки можно вынести за знак определителя. Свойства 3) и 4) вместе
выражают свойство линейности определителя по отношению к каждой его строке. Поэтому свойства 3) и 4) вместе
называются свойством полилинейности (билинейности для определителя второго порядка и трилинейности для
определителя третьего порядка) относительно строк.
5) Если все элементы некоторой строки определителя равны нулю, то он равен нулю.
6) Если две строки определителя одинаковы, то он равен нулю.
7) Если соответствующие элементы двух строк определителя пропорциональны, то он равен нулю.
8) Если к элементам некоторой строки определителя прибавить соответствующие элементы другой его строки,
умноженные на одно и то же число (любое), то определитель не изменится. Минором данного элемента определителя
называется определитель, получающийся из данного определителя вычеркиванием строки и столбца, на пересечении
которых стоит данный элемент. Алгебраическим дополнением элемента 𝑎𝑖𝑗 определителя называется минор этого
элемента, умноженный на (−1)𝑖+𝑗 (обозначается через 𝐴𝑖𝑗 ).
9) Определитель равен сумме произведений элементов любой его строки на их алгебраические дополнения (теорема
о разложении определителя по строке).
10) Сумма произведений элементов какой-либо строки определителя на алгебраические дополнения
соответствующих элементов другой его строки равна нулю (теорема об умножении на чужие алгебраические дополнения).
7. Линейные операции над векторами. Базис и координаты вектора
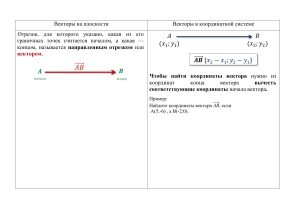
(Геометрическим) вектором называется направленный отрезок. Точка 𝐴 называется началом вектора ̅̅̅̅
𝐴𝐵 , а точка 𝐵
– его концом. Про вектор ̅̅̅̅
𝐴𝐵 говорят, что он приложен к точке 𝐴.
̅̅̅̅ называется длина отрезка 𝐴𝐵 (обозначается |𝐴𝐵
̅̅̅̅ |).
Длиной или модулем вектора 𝐴𝐵
Говорят, что два вектора имеют одинаковые направления (противоположные направления), если они лежат на
параллельных прямых и направлены в одну сторону (противоположные стороны). Все одинаково направленные векторы
определяют направление в пространстве. Про каждый из них говорят, что он имеет это направление. Таким образом,
вместо «векторы имеют одинаковые направления» можно говорить «векторы имеют одно и то же направление» (и
обратно).
Два вектора называются равными, если они имеют одинаковые длины и одинаковые направления. На равные
векторы в геометрии смотрят как на один и тот же вектор, который просто приложен к различным точкам. Такой вектор
называется свободным. Свободные векторы обозначаются через 𝑎, 𝑏, 𝑐. Чтобы показать, что свободный вектор 𝑎 приложен
к точке 𝐴, пишут 𝑎 = ̅̅̅̅
𝐴𝐵.
̅̅̅̅, … Всякий такой
Рассматриваются также геометрические векторы, у которых начало и конец совпадают: ̅̅̅̅
𝐴𝐴, 𝐵𝐵
вектор называется нулевым (или нулем). Длина нулевого вектора считается равной нулю, а его направление не
определяется (можно считать, что оно какое угодно). Все нулевые векторы считаются равными и рассматриваются как
один нулевой свободный вектор. Его также называют нулем и обозначают через 0.
̅̅̅̅̅ +
Суммой двух векторов 𝑎 и 𝑏 называется вектор 𝑎 + 𝑏, который определяется по “правилу треугольника”: 𝑂𝐴
̅̅̅̅ = 𝑂𝐵
̅̅̅̅ (если 𝑎 = 𝑂𝐴
̅̅̅̅̅, 𝑏 = 𝐴𝐵
̅̅̅̅, то 𝑎 + 𝑏 = 𝑂𝐵
̅̅̅̅).
𝐴𝐵
Сложение векторов виды:
Правило «Треугольника»
Правило «Параллелограмма»
Правило
«Многоугольника»
Правило
«Параллелепипеда»
Произведением вектора 𝑎 на число называется вектор 𝑎, длина которого равна |𝜆𝑎| = |𝜆| ∗ |𝑎|, а направление
совпадает с направлением вектора 𝑎, если > 0, и противоположно ему, если < 0.
Эти две операции – сложение и умножение вектора на число – называются линейными.
Вектор 𝑏 = ̅̅̅̅
𝐵𝐴 имеет ту же длину, что и вектор 𝑎 = ̅̅̅̅
𝐵𝐴, но противоположное направление. Он называется вектором,
противоположным вектору 𝑎, и обозначается через −𝑎. Очевидно, что −𝑎 = (−1)𝑎.
Свойства линейных операций – “обычные” (такие же, как для чисел). Это позволяет сделать важный вывод: любое
выражение, составленное из векторов и чисел с помощью линейных операций, можно преобразовывать по обычным
алгебраическим правилам.
Векторы называются коллинеарными, если они лежат на параллельных прямых.
Если вектор 𝑎 ≠ 0, то любой коллинеарный ему вектор 𝑏 можно получить из 𝑎 умножением на число: 𝑏 = 𝑎 (это
число определено однозначно).
Векторы называются компланарными, если они лежат в параллельных плоскостях.
Если векторы 𝑎 и 𝑏 неколлинеарны, то любой компланарный с ними вектор c может быть разложен по этим
векторам: 𝑐 = 𝑎 + 𝑏, причем единственным образом.
Если векторы 𝑎, 𝑏, 𝑐 некомпланарны, то любой вектор 𝑑 в пространстве может быть разложен по этим векторам: 𝑑 =
𝑎 + 𝑏 + 𝜈𝑐, причем единственным образом.
Эти утверждения приводят к следующим определениям.
Про всякую тройку некомпланарных векторов говорят, что она образует базис в пространстве. Базисом на плоскости
называют всякую пару неколлинеарных векторов этой плоскости, а базисом на прямой – всякий ненулевой вектор этой
прямой.
Коэффициенты разложения вектора по базису называются координатами вектора в этом базисе. Координаты вектора
в заданном базисе определены однозначно. Таким образом, вектор 𝑎 имеет координаты 𝑥, 𝑦, 𝑧 в базисе 𝑒1 , 𝑒2 , 𝑒3 тогда и
только тогда, когда 𝑎 = 𝑥𝑒1 + 𝑦𝑒2 + 𝑧𝑒3 . Это равенство записывается также в сокращенной форме: 𝑎 = (𝑥, 𝑦, 𝑧).
Линейные операции в координатной форме:
1) при сложении векторов их соответствующие координаты складываются: если 𝑎 = (𝑥1 , 𝑦1 , 𝑧1 ), 𝑏 = (𝑥2 , 𝑦2 , 𝑧2 ), то
𝑎 + 𝑏 = (𝑥1 + 𝑥2 , 𝑦1 + 𝑦2 , 𝑧1 + 𝑧2 );
2) при умножении вектора на число каждая его координата умножается на это число: если 𝑎 = (𝑥, 𝑦, 𝑧) и ∈ ℝ , то
𝑎 = (𝜆𝑥, 𝜆𝑦, 𝜆𝑧).
Условие коллинеарности двух векторов в координатной форме: два вектора коллинеарны тогда и только тогда, когда
их соответствующие координаты пропорциональны. В каждом из этих утверждений речь идет о координатах векторов в
некотором фиксированном базисе (любом).
8. Ортонормированный базис и прямоугольные координаты вектора.
Вектор, длина которого равна единице, называется единичным вектором или ортом. Единичный вектор, имеющий
направление данной оси 𝑙 (данного вектора 𝑎) называется ортом оси 𝑙 (ортом вектора 𝑎).
Базис называется ортонормированным, если он состоит из попарно перпендикулярных единичных векторов.
Орты осей 𝑥, 𝑦, 𝑧 прямоугольной системы координат образуют ортонормированный базис и обозначаются через 𝑖, 𝑗, 𝑘
соответственно.
Координаты вектора 𝑎 в базисе 𝑖, 𝑗, 𝑘 называются прямоугольными координатами вектора 𝑎. Как и в случае
произвольного базиса, прямоугольные координаты вектора определены однозначно. Вектор 𝑎 имеет координаты 𝑥, 𝑦, 𝑧 в
базисе 𝑖, 𝑗, 𝑘, тогда и только тогда, когда 𝑎 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘, что записывается также в сокращенной форме: 𝑎 = (𝑥, 𝑦, 𝑧).
Далее мы будем рассматривать только прямоугольные координаты вектора и поэтому будем называть их просто
координатами.
Проекцией точки 𝑀 на ось 𝑙 называется точка пересечения оси 𝑙 с плоскостью, проходящей через точку 𝑀
̅̅̅̅ по оси называется вектор ̅̅̅̅̅̅̅
перпендикулярно оси 𝑙. Составляющей вектора 𝐴𝐵
𝐴1 𝐵1 , где 𝐴1 и 𝐵1 – проекции точек 𝐴 и 𝐵 на
ось 𝑙.
Проекцией вектора 𝑎 на ось 𝑙 называется длина его составляющей по оси 𝑙, взятая со знаком “+”, если направления
составляющей и оси 𝑙 совпадают, и со знаком “–”, если эти направления противоположны. Обозначается она через пр𝑙 𝑎.
Под проекцией вектора 𝑎 на вектор 𝑏 (обозначается пр𝑏 𝑎) понимается проекция вектора 𝑎 на (любую) ось, имеющую
направление вектора 𝑏.
Любые два ненулевых вектора 𝑎 и 𝑏, приложенные к одной точке, образуют два угла. Величина меньшего из них
̂𝑏). Из определения следует, что 0 ≤ (𝑎,
̂𝑏) ≤ 𝜋. Под
называется углом между векторами 𝑎 и 𝑏 и обозначается через (𝑎,
̂𝑙 )) понимается угол между вектором 𝑎 и ортом оси 𝑙.
углом между вектором 𝑎 и осью 𝑙 (обозначается (𝑎,
Справедливы формулы:
̂𝑙 ) ; пр𝑙 (𝑎 + 𝑏) = пр𝑙 𝑎 + пр𝑙 𝑏;
пр𝑙 𝑎 = |𝑎| ∗ cos(𝑎,
пр𝑙 (𝜆𝑎) = 𝜆 ∗ пр𝑙 𝑎
Прямоугольные координаты вектора равны его проекциям на соответствующие координатные оси.
Вектор 𝑟 = ̅̅̅̅̅
𝑂𝑀 называется радиус-вектором точки 𝑀 (𝑂 – начало координат).
Координаты радиус-вектора точки 𝑀 равны соответствующим координатам точки 𝑀.
Координаты вектора ̅̅̅̅
𝐴𝐵 равны разностям соответствующих координат его конца 𝐵 и начала 𝐴.
Длина вектора 𝑎 = (𝑥, 𝑦, 𝑧) равна |𝑎| = √𝑥 2 + 𝑦 2 + 𝑧 2 .
Обозначим через , , углы между (ненулевым) вектором 𝑎 и осями 𝑥, 𝑦, 𝑧 соответственно. Косинусы этих углов
называются направляющими косинусами вектора 𝑎. Справедливы формулы:
𝑥
𝑦
𝑧
𝑐𝑜𝑠𝛼 =
, 𝑐𝑜𝑠𝛽 =
, 𝑐𝑜𝑠𝛾 = .
|𝑎|
|𝑎|
|𝑎|
Направляющие косинусы вектора равны координатам орта этого вектора.
9. Скалярное произведение векторов
Скалярным произведением двух (ненулевых) векторов 𝑎 и 𝑏 называется число
̂𝑏)
𝑎𝑏 = |𝑎| ∗ |𝑏| ∗ cos (𝑎,
Вместо 𝑎𝑏 применяется и другое обозначение: (𝑎, 𝑏).
Механический смысл скалярного произведения: скалярное произведение силы на перемещение равно работе этой
силы на этом перемещении.
Скалярное произведение вектора 𝑎 на себя, т.е. 𝑎𝑎, называется скалярным квадратом вектора 𝑎 и обозначается через
𝑎 . Справедливы формулы:
2
̂𝑏) =
|𝑎| = √𝑎2 ; cos(𝑎,
𝑎𝑏
.
|𝑎| ∗ |𝑏|
Два вектора называются ортогональными, если они перпендикулярны (угол между ними равен ) или если хотя бы
один из них равен нулю.
2
Условие ортогональности двух векторов: два вектора ортогональны тогда и только тогда, когда их скалярное
произведение равно нулю.
𝑎𝑏
Проекция вектора 𝑎 на вектор 𝑏 равна пр𝑏 𝑎 = |𝑏|.
Свойства скалярного произведения:
1) 𝑎𝑏 = 𝑏𝑎 ;
2) (𝑎 + 𝑏)𝑐 = 𝑎𝑐 + 𝑏𝑐 ;
3) (𝑎)𝑏 = (𝑎𝑏);
4) 𝑎𝑎 > 0 для любого вектора 𝑎 ≠ 0; 𝑎𝑎 = 0, если 𝑎 = 0.
Свойства 2) и 3) вместе выражают свойство линейности скалярного произведения по отношению к первому
сомножителю. В силу свойства 1) скалярное произведение линейно и по отношению ко второму сомножителю (это
означает, что скалярное произведение билинейно).
Скалярное произведение в координатной форме, где 𝑎 = (𝑥1 , 𝑦1 , 𝑧1 ), 𝑏 = (𝑥2 , 𝑦2 , 𝑧2 ):
𝑎𝑏 = 𝑥1 𝑥2 + 𝑦1 𝑦2 + 𝑧1 𝑧2 .
10.Векторное произведение векторов
(Упорядоченная) тройка некомпланарных векторов называется правой (левой), если кратчайший поворот от первого
вектора ко второму (совмещающий их направления) виден с конца третьего вектора происходящим против часовой
стрелки (по часовой стрелке).
Векторным произведением двух неколлинеарных векторов 𝑎 и 𝑏 называется вектор 𝑎 × 𝑏, длина которого равна
̂𝑏)
|𝑎 × 𝑏| = |𝑎| ∗ |𝑏| ∗ 𝑠𝑖𝑛(𝑎,
(т.е. площади параллелограмма, построенного на векторах 𝑎 и 𝑏, приложенных к одной точке), а направление определяется
двумя условиями: он перпендикулярен каждому из векторов 𝑎, 𝑏; тройка 𝑎, 𝑏, 𝑎 × 𝑏 – правая.
Векторное произведение двух коллинеарных векторов принимается равным нулю.
Вместо 𝑎 × 𝑏 применяется и другое обозначение: [𝑎, 𝑏].
Свойства векторного произведения:
1) 𝑎 × 𝑏 = −(𝑏 × 𝑎);
2) (𝑎 + 𝑏) × 𝑐 = 𝑎 × 𝑐 + 𝑏 × 𝑐;
3) (𝑎) × 𝑏 = (𝑎 × 𝑏).
Свойство 1) называется кососимметричностью векторного произведения. Свойства 2) и 3) вместе выражают
свойство линейности векторного произведения по отношению к первому сомножителю. В силу свойства 1) векторное
произведение линейно и по отношению ко второму сомножителю (таким образом, векторное произведение билинейно).
Векторное произведение в координатной форме, где 𝑎 = (𝑥1 , 𝑦1 , 𝑧1 ), 𝑏 = (𝑥2 , 𝑦2 , 𝑧2 ):
𝑖
𝑎 × 𝑏 = |𝑥1
𝑥2
𝑗
𝑦1
𝑦2
𝑘
𝑧1 |
𝑧2
11.Смешанное произведение векторов
Смешанным произведением трех векторов 𝑎, 𝑏, 𝑐 называется число 𝑎𝑏𝑐, равное скалярному произведению
векторного произведения первых двух векторов на третий вектор 𝑐:
𝑎𝑏𝑐 = (𝑎 × 𝑏)𝑐.
Вместо 𝑎𝑏𝑐 применяется и другое обозначение: (𝑎, 𝑏, 𝑐).
Условие компланарности трех векторов: три вектора компланарны тогда и только тогда, когда их смешанное
произведение равно нулю.
Геометрический смысл модуля и знака смешанного произведения: модуль смешанного произведения трех
некомпланарных векторов равен объему параллелепипеда, построенного на этих векторах (приложенных к одной точке);
если оно положительно, то данная тройка векторов – правая, а если отрицательно, то – левая.
Смешанное произведение в координатной форме, где 𝑎 = (𝑥1 , 𝑦1 , 𝑧1 ), 𝑏 = (𝑥2 , 𝑦2 , 𝑧2 ), 𝑐 = (𝑥3 , 𝑦3 , 𝑧3 ):
𝑥1
𝑎𝑏𝑐 = |𝑥2
𝑥3
𝑦1
𝑦2
𝑦3
𝑧1
𝑧2 |
𝑧3
Смешанное произведение 1) меняет знак при перестановке любых двух сомножителей; 2) линейно по отношению к
каждому сомножителю. Свойство 1) называется кососимметричностью смешанного произведения, а свойство 2) –
трилинейностью.
12.Виды уравнений прямой на плоскости
Всякий ненулевой вектор, параллельный (перпендикулярный) данной прямой,
называется направляющим (нормальным) вектором этой прямой.
Углом наклона прямой (к оси 𝑥) называется угол, на который нужно повернуть ось
𝑥, чтобы она стала параллельной этой прямой. Тангенс угла наклона прямой называется
угловым коэффициентом прямой и обозначается через 𝑘 = 𝑡𝑔𝜑.
Взаимосвязь между направляющим вектором и вектором нормалью:
𝑎 = (𝑙, 𝑚) → 𝑛 = (𝑚, −𝑙) → 𝑛 = (𝐴, 𝐵)
Виды уравнений прямой на плоскости
Векторное, где 𝑟0 – радиус-вектор некоторой точки прямой, 𝑎 – направляющий вектор
прямой
𝑟 = 𝑟0 + 𝑡𝑎
Параметрические, где 𝑥0 , 𝑦0 – координаты некоторой точки прямой, 𝑎 = (𝑙, 𝑚) –
координаты направляющего вектора прямой
𝑥 = 𝑥0 + 𝑙𝑡
𝑦 = 𝑦0 + 𝑚𝑡
Каноническое, где 𝑥0 , 𝑦0 – координаты некоторой точки прямой, 𝑎 = (𝑙, 𝑚) –
координаты направляющего вектора прямой
𝑥 − 𝑥0 𝑦 − 𝑦0
=
𝑙
𝑚
Прямая параллельная оси 𝑦 («вертикальной»)
𝑥=𝑎
Прямая параллельная оси 𝑥 («горизонтальной»)
𝑦=𝑏
𝑥 − 𝑥1
𝑦 − 𝑦1
=
𝑥2 − 𝑥1 𝑦2 − 𝑦1
Прямая проходящая через две точки, где точка 𝑀1 = (𝑥1 , 𝑦1 ) и 𝑀2 = (𝑥2 , 𝑦2 )
Прямая проходящая через точку 𝑀 = (𝑥0 , 𝑦0 ) с данным нормальным вектором
(нормалью) 𝑛 = (𝐴, 𝐵)
Прямая в общем виде с данным нормальным вектором (нормалью) 𝑛 = (𝐴, 𝐵)
Расстояние 𝑑 от точки 𝑀(𝑥0 , 𝑦0 ) до прямой 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0 находится по формуле
𝐴(𝑥 − 𝑥0 ) + 𝐵(𝑦 − 𝑦0 ) = 0
𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0
|𝐴𝑥0 + 𝐵𝑦0 + 𝐶|
𝑑=
√𝐴2 + 𝐵2
Прямая с угловым коэффициентом 𝑘
Прямая проходящая через точку 𝑀 = (𝑥0 , 𝑦0 ) с угловым коэффициентом 𝑘
Угловой коэффициент прямой, проходящей через точки 𝑀1 = (𝑥1 , 𝑦1 ) и 𝑀2 = (𝑥2 , 𝑦2 )
Угол между прямыми 𝐴1 𝑥 + 𝐵1 𝑦 + 𝐶1 = 0 и 𝐴2 𝑥 + 𝐵2 𝑦 + 𝐶2 = 0
Угол между прямыми 𝑦 = 𝑘1 𝑥 + 𝑏 и 𝑦 = 𝑘2 𝑥 + 𝑏
Условие параллельности прямых 𝐴1 𝑥 + 𝐵1 𝑦 + 𝐶1 = 0 и 𝐴2 𝑥 + 𝐵2 𝑦 + 𝐶2 = 0
Условие перпендикулярности прямых 𝐴1 𝑥 + 𝐵1 𝑦 + 𝐶1 = 0 и 𝐴2 𝑥 + 𝐵2 𝑦 + 𝐶2 = 0
Условие параллельности прямых 𝑦 = 𝑘1 𝑥 + 𝑏 и 𝑦 = 𝑘2 𝑥 + 𝑏
Условие перпендикулярности прямых 𝑦 = 𝑘1 𝑥 + 𝑏 и 𝑦 = 𝑘2 𝑥 + 𝑏
𝑦 = 𝑘𝑥 + 𝑏
𝑦 − 𝑦0 = 𝑘(𝑥 − 𝑥0 )
𝑦2 − 𝑦1
𝑘=
𝑥2 − 𝑥1
|𝑛1 𝑛2 |
|𝑛1 | ∗ |𝑛2 |
𝑘2 − 𝑘1
𝑡𝑔𝜑 = |
|
1 + 𝑘2 𝑘1
𝐴1 𝐵1
=
𝐴2 𝐵2
𝑐𝑜𝑠𝜑 =
𝐴1 𝐴2 + 𝐵1 𝐵2 = 0
𝑘1 = 𝑘2
1
𝑘2 = −
𝑘1
13.Плоскость и прямая в пространстве
Всякий ненулевой вектор, перпендикулярный данной плоскости, называется
нормальным вектором этой плоскости – 𝑛. У плоскости отсутствует направляющий
вектор 𝑎. У прямой в пространстве есть и направляющий вектор 𝑎, и нормаль 𝑛.
Вопрос о взаимном расположении двух прямых в пространстве решается с
помощью их направляющих векторов, а для прямой и плоскости – с помощью
направляющего вектора прямой и нормального вектора плоскости.
Виды уравнений плоскости
Уравнение плоскости в общем виде, где 𝑛 = (𝐴, 𝐵, 𝐶) нормальный вектор
𝐴𝑥 + 𝐵𝑦 + 𝐶𝑧 + 𝐷 = 0
Уравнение плоскости, проходящей через точку 𝑀 = (𝑥0 , 𝑦0 , 𝑧0 ) с данным
нормальным вектором (нормалью) 𝑛 = (𝐴, 𝐵, 𝐶)
𝐴(𝑥 − 𝑥0 ) + 𝐵(𝑦 − 𝑦0 ) + 𝐶(𝑧 − 𝑧0 ) = 0
Расстояние 𝑑 от точки 𝑀(𝑥0 , 𝑦0 ) до плоскости 𝐴𝑥 + 𝐵𝑦 + 𝐶𝑧 + 𝐷 = 0
находится по формуле
𝑑=
|𝐴𝑥0 + 𝐵𝑦0 + 𝐶𝑧0 + 𝐷|
√𝐴2 + 𝐵2 + 𝐶 2
Виды уравнений прямой в пространстве
Векторное, где 𝑟0 – радиус-вектор некоторой точки прямой, 𝑎 –
направляющий вектор прямой
𝑟 = 𝑟0 + 𝑡𝑎
Параметрические, где 𝑥0 , 𝑦0 , 𝑧0 – координаты некоторой точки прямой, 𝑎 =
(𝑙, 𝑚, 𝑛) – координаты направляющего вектора прямой
𝑥 = 𝑥0 + 𝑙𝑡
𝑦 = 𝑦0 + 𝑚𝑡
𝑧 = 𝑧0 + 𝑛𝑡
Прямая проходящая через две точки, где точка 𝑀1 = (𝑥1 , 𝑦1 , 𝑧1 ) и 𝑀2 =
(𝑥2 , 𝑦2 , 𝑧2 )
𝑥 − 𝑥0 𝑦 − 𝑦0 𝑧 − 𝑧0
=
=
𝑙
𝑚
𝑛
𝑥 − 𝑥1
𝑦 − 𝑦1
𝑧 − 𝑧1
=
=
𝑥2 − 𝑥1 𝑦2 − 𝑦1 𝑧2 − 𝑧1
Прямая в общем виде с данным нормальным вектором (нормалью) 𝑛 =
(𝐴, 𝐵, 𝐶)
𝐴 𝑥 + 𝐵1 𝑦 + 𝐶1 𝑧 + 𝐷1 = 0
{ 1
𝐴2 𝑥 + 𝐵2 𝑦 + 𝐶2 𝑧 + 𝐷2 = 0
Каноническое, где 𝑥0 , 𝑦0 , 𝑧0 – координаты некоторой точки прямой, 𝑎 =
(𝑙, 𝑚, 𝑛) – координаты направляющего вектора прямой