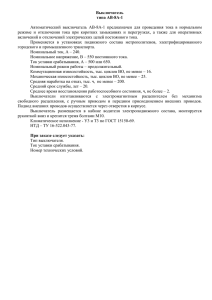
Министерство сельского хозяйства Российской Федерации Департамент научно-технологической политики и образования Федеральное государственное бюджетное образовательное учреждение высшего образования «Волгоградский государственный аграрный университет» С. В. Волобуев, Г.Н. Синева Механические и электромеханические характеристики трехфазного асинхронного электродвигателя с короткозамкнутым ротором в двигательном и тормозном режимах Методические рекомендации для выполнения лабораторной работы по дисциплине «Электропривод» для направлений подготовки: 35.03.06 – Агроинженерия; 13.03.02 – Электроэнергетика и электротехника, 13.05.01 – Тепло-, электрообеспечение специальных технических систем и объектов Волгоград Волгоградский ГАУ 2020 УДК 621.313 ББК 31.261.2 В-68 Рецензент – кандидат технических наук, доцент кафедры «Электрооборудование и электрохозяйство предприятий АПК» ФГБОУ ВО «Волгоградский государственный аграрный университет» Шанцин В.А. Волобуев, Сергей Васильевич В- 68 Методические рекомендации для выполнения лабораторной работы по дисциплине «Электропривод» «Механические и электромеханические характеристики трехфазного асинхронного электродвигателя с короткозамкнутым ротором в двигательном и тормозном режимах» для направлений подготовки: 35.03.06 – Агроинженерия; 13.03.02 – Электроэнергетика и электротехника, 13.05.01 – Тепло-, электрообеспечение специальных технических систем и объектов / С.В. Волобуев, Г.Н. Синева // Волгоград: ФГБОУ ВО Волгоградский ГАУ, 2020. – 21 с. Методические рекомендации для выполнения лабораторной работы по дисциплине «Электропривод» «Механические и электромеханические характеристики трехфазного асинхронного электродвигателя с короткозамкнутым ротором в двигательном и тормозном режимах» содержат цель и программу лабораторной работы, задание для домашней подготовки, таблицы для внесения опытных и расчетных данных, необходимый теоретический материал, контрольные вопросы, а также направлены на освоение общепрофессиональной компетенции ПК-7. Для студентов высших учебных заведений, обучающихся по направлению подготовки 35.03.06 – Агроинженерия; 13.03.02 – Электроэнергетика и электротехника, 13.05.01 – Тепло-, электрообеспечение специальных технических систем и объектов . УДК 621.313 ББК 31.261.2 ФГБОУ ВО Волгоградский ГАУ, 2020 г. Волобуев С.В., Синева Г.Н. 2020 г. 2 СПИСОК АББРЕВИАТУР Основные сокращения АД - асинхронный двигатель АД с КЗР - асинхронный двигатель с короткозамкнутым ротором ДР - двигательный режим ДТ - динамическое торможение ЕХ - естественная характеристика ИХ - искусственная характеристика к.з. - короткое замыкание МПТ - машина постоянного тока MX - механическая характеристика РТ - рекуперативное торможение ТПВ - торможение противовключением XX - холостой ход ЧВ - - частота вращения ротора АД ЧВ ИХХ ЭД - частота вращения идеального XX ЭП - электрический двигатель ЭМХ - электромеханическая характеристика ЭП - электрический привод Основные обозначения α = R1/R'2 cos φн- номинальный коэффициент мощности f - частота питающего напряжения I1 - ток статора АД I1н - номинальный ток статора I/2 - приведённый ток ротора АД I/2н - номинальный приведённый ток ротора IОН - номинальный ток намагничивания 3 Iхх - ток XX АД Iя - ток в якорной цепи МПТ Iкз - ток КЗ статора М - момент ЭД Мк - критический (максимальный) момент АД Mmin - минимальный момент АД МН - номинальный момент ЭД МП - пусковой момент АД Мэл - электромагнитный момент АД m - число фаз обмотки статора АД Р - число пар полюсов обмотки статора АД R1 - активное фазное сопротивление обмотки статора АД R`2 - приведённое активное фазное сопротивление обмотки ротора S - скольжение ротора АД Sк - критическое скольжение ротора АД Sн - номинальное скольжение Sрт - скольжение ротора в режиме РТ U - напряжение источника питания Uн - номинальное напряжение источника питания ω - частота вращения, рад/с ωн - номинальная ЧВ ωо - ЧВ ИХХ магнитного поля статора АД ωрт - ЧВ в режиме РТ х1 - индуктивное фазное сопротивление обмотки статора х'2 - приведённое индуктивное фазное сопротивление обмотки ротора хк - индуктивное фазное сопротивление короткого замыкания АД 4 ЛАБОРАТОРНАЯ РАБОТА № 3 Механические и электромеханические характеристики трехфазного асинхронного электродвигателя с короткозамкнутым ротором в двигательном и тормозных режимах Цель работы – экспериментальное исследование ЭМХ и MX АД с КЗР в двигательном и тормозных режимах. Предмет изучения (исследования) – АД с КЗР серии АИР564АУЗ Основные технические данные АД: Uн = 220/380 В; Iн=0,8/0,5 А; Рн= 0,12 кВт; cosφ = 0,66; ηн= 57 %. Нагрузочное устройство – МПТ: Uн= 220 В; Рн= 90 Вт; nн= 1500 об/мин; Rя=62 Ом. Задание для домашней подготовки 1. Ознакомьтесь с содержанием настоящего методического пособия. 2. Изучите основные теоретические положения. 3. Ответьте на вопросы раздела «Контрольные вопросы». 4. Рассчитайте и постройте EX S(I) и M(S) в двигательном режиме по их характерным точкам (каталожным данным). 5. Подготовьте бланк отчета. Программа выполнения работы 1. Собрать электрическую схему лабораторной установки. 2. Снять ИХ в режиме рекуперативного торможения, в двигательном режиме, в режиме торможения противовключением. ИХ в этих режимах снимаются при значениях напряжения на зажимах обмотки статора АД меньше номинального (задается преподавателем). 4. Снять ИХ в режиме динамического торможения при нескольких значениях постоянного тока (задается преподавателем не более 0,3 А). 5. Рассчитать Мэл = f(ω) в двигательном и тормозных режимах. 6. Построить ИХ ω = f(М) и ω=f(I) АД в двигательном и тормозных 5 режимах. 7. Составить отчет по работе. Краткие основные теоретические положения ЭМХ АД обычно представляют как зависимости ω(I1) и ω(I/2). Учитывая, что ω = ωо(1-S) (1.0) S= (ωo- ω)/ ωo (1.1) или все равно что ЭМХ можно представить как S(I1) и S(I/2). Ток статора АД может быть выражен так I1≈ I1 I он2 I 2`2 (2.0) где: I он I хх I н (sin н cos н М к М к2 1 (3.0) ) и 2 I 2 U / ( R1 R2/ / S ) 2 X к2 US / ( R1 S R2/ ) 2 S 2 X к / (4.0) Согласно (3.0) номинальный ток намагничивания АД есть величина постоянная и, следовательно, изменение тока статора от скольжения будет определяться изменением приведенного тока ротора от скольжения. На рисунке 1 приведены ЭМХ ω(I1) и ω(I2/). Проанализируем их. Характерные точки ЭМХ следующие: 1. S = 0, ω = ω0, I2/ = 0, I1 = Iон – точка ИХХ. 2. S = Sн, ω= ωн, I2/ = I '2н, I1 = I1н – точка номинального тока. 3. S = 1, ω = 0, I,= Ik3= IП -точка к.з. (режим к.з. ЭД). 4. Sкр = - R`2/ R1, ωкр = ωо/1 - Sкр, I2/ = I2max = U / Xk - точка максимального значения тока ротора, лежащая в области рекуперативного торможения. 5. S →±∞, ω→±∞, I2/ →lim I2/=U/ R12 Х к2 асимптотическое значение 6 тока ротора при бесконечно большом увеличении скольжения и ЧВ. s, sРТ sн , РТ 0 0 I1 lim I 2 I 2 I 2 max 1 0 I 0н I1н Iп I 2 , I1 Рисунок 1 – Электромеханические характеристики АД Характерные точки ЭМХ в двигательном режиме рассчитываются и строятся по каталожным данным АД. Выражение МХ АД имеет вид: mp U 2 R/2 s М 2 f ( R1 s R2/ ) 2 X k2 s 2 (5.0) Зависимость (5.0) после преобразований может быть выражена так называемой формулой Клосса: М 2М к (1 S k ) S / S k S k / S 2S k (6.0) Или при допущении, что R1=0 М 2М к S / Sk Sk / S (7.0) где: 7 R2/ Sk=± (8.0) R1 X k или Sк Sн ( М М 2 1) (9.0) mp U2 Мк 2 f 2( R1 R12 X k2 ) (10.0) Причем знак «+» в (8.0) –(10.0) относиться к области скольжения S<0. Как следует из (8.0), абсолютное значение Sк в двигательном режиме и режиме РТ одинаковы. Максимальный же момент, согласно (10.0) в режиме РТ по абсолютному значению больше, чем в двигательном. МХ АД приведена на рисунке 2. s, Режим , sкРТ РТ 0 0 sн sк Режим Режим двиг. ДТ sкДТ M кРТ M кДТ 0,750 1 0 Mн Mк M к. з.M п M min M, Н м Режим ТПВ Рисунок 2 – Механические характеристики АД в двигательном и тормозных режимах Характерные точки MX следующие: 1. S = 0, ω = ω0, М = 0 - точка ИХХ 8 2. S = Sн, ω= ωн, М=Мн - точка номинального тока 3. S = ±Sк , ω = ±ωsk, М = ± Мк- точка критического момента 4. S = 0,8…0,7, ω = ωо, М = Мmin – точка минимального момента. 5. S=1, ω = 0, М = Мкз = Мп - точка кз. 6. S→ ±∞, ω→±∞, М→0 – асимптота МХ, которой является ось ЧВ. Характерные точки МХ в двигательном режиме определяются по каталожным данным АД. ЭМХ и MX в режимах РТ и ТП могут быть выражены (1.0), (4.0) и (6.0) -(10.0) с учетом, что практически скольжение изменяется в пределах: для РТ -1 ≤ SРТ ≤ 0 и ТП 2 ≤ SТП ≤ 1 Причем, в режиме РТ ток статора имеет максимум при SРТ= -R2/R1, в режиме ТП – будет больше пускового тока, стремясь к своей асимптоте: lim I 2 s U / R12 X 12 . В режиме ДТ уравнение MX по своей структуре аналогично уравнению MX АД в двигательном режиме: -МДТ = 2М КДТ S ДТ / S КДТ S КДТ / S ДТ 2 mI экв Х м2 МКДТ= 2 0 ( Х Х 2 ) SДТ = ω/ω0 (11.0) (12.0) (13.0) 9 R2/ SКДТ= X X 2/ (14.0) где Хμ = Е/20/Iμ - реактивное сопротивление цепи намагничивания; Е/20- приведенная вторичная ЭДС при ЧВ ИХХ АД и намагничивающем токе Iμ; Iэкв - первичный эквивалентный ток (зависит от схемы соединения обмотки статора и величины постоянного тока). Выражение ЭМХ при ДТ имеет вид: I/2дт = I экв Х ( R2/ / S ) 2 ( X X 2/ ) 2 (15.0) Формулы (11.0) - (15.0) показывают зависимость тока и момента АД не только от скольжения S, но и от магнитного состояния АД, отражаемого параметром Хμ. Если пренебречь последним фактором и считать АД не насыщенным, а остальные параметры неизменными, то ток и момент будут являться только функциями скольжения. ЭМХ и MX АД при ДТ приведены на рисунке 3. Характерные точки ЭМХ и MX: 1. SДТ = 0, I/2ДТ = 0 и МДТ = 0 2. SДТ =SКДТ, МДТ = МКДТ 3. SДТ→∞, I/2ДТ→ lim I/2ДТ, МДТ→0. 10 s ДТ 1 0 I 2 ДТ 2 I 2 ДТ 1 M I 2 ДТ 2 I 2 ДТ 1 M кДТ 2 M кДТ 1 I 2 ( s ) 0 I экв. I 2 Рисунок 3 – Электромеханические характеристики АД в режиме РТ 11 Указания по проведению экспериментов 1 Снятие ЭМХ в двигательном и тормозных режимах (рекуперативное торможение и торможение противовключением) С целью уменьшения разброса опытных точек ЭМХ АД целесообразно снимать с режима рекуперативного торможения, а затем переходить к двигательному режиму и, наконец, к режиму торможения противовключением. Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания. Соедините аппаратуру в соответствии с электрической схемой, приведенной на рисунке 4. Установите переключатели тиристорного преобразователя G3 в следующие положения: «РУЧН.», «U = const», «ОТКЛ.», «СТОП». Его регулировочную рукоятку UУПР установите в крайнее левое положение. В трехфазной трансформаторной группе А4 установите номинальные напряжения первичных и вторичных обмоток трансформаторов соответственно равными 230 и 133В. Включите устройство защитного отключения и автоматические выключатели однофазного источника питания G1. Включите выключатель «СЕТЬ» указателя частоты вращения Р2. Включите выключатель «СЕТЬ» многофункционального электроизмерительного прибора Р3. Включите выключатель «СЕТЬ» тиристорного преобразователя Включите трехфазный источник питания G2. Нажмите кнопку «ВКЛ.» трехполюсного выключателя А8, при G3. этом должен пуститься двигатель М1. 12 Переведите переключатели тиристорного преобразователя G3 в положения: «ВКЛ.» и «ВПЕРЕД». Вращая его регулировочную рукоятку UУПР изменяйте нагрузочный момент на валу двигателя М1. Показания амперметра (ток статора I) и ваттметра (потребляемая мощность Р), измеренных с помощью многофункционального электроизмерительного прибора Р3, и значение частоты вращения n, измеренного с помощью указателя Р2, заносите в таблицу 1. Таблица 1 – Опытные и расчетные данные при исследовании работы АД в двигательном и тормозных режимах (рекуперативное торможение и торможение противовключением) Режим работы ИД Измерено n, об / мин U,В I, А P, Вт Q, вар Вычислено , М, рад / с Нм РТ ЧВИХХ ДР к.з. ТПВ 13 После завершения эксперимента регулировочную рукоятку UУПР тиристорного преобразователя G3 установите в крайнее левое положение, переведите его переключатели в положение «СТОП» и «ОТКЛ.», отключите выключатель «СЕТЬ». Отключите источник G2. Отключите источник G1. Используя данные таблицы 1, вычислите электромагнитный момент и угловую частоту вращения двигателя М1. M Pд 1 ( Р 3 80 I 2 ) , 50 (16) где Pд – потребляемая активная мощность, Вт. n 30 . (17) Используя данные таблицы 1, постройте электромеханическую характеристику f (I ) и механическую характеристику f (М ) трехфазного асинхронного двигателя с короткозамкнутым ротором. 14 Рисунок 4 – Схема электрических соединений 15 Я 218.9 G1 ~ 220 B 211 G3 В A2 A1 М2 E1 550 P3 E2 E3 E4 301.1 A8 F1 U2 V2 W2 М1 U1 V1 W1 347.3 A4 100.7 B G5 201.4 G2 L1 L2 L3 N PE ~ 380 B 506.5 P2 n 2 Снятие ЭМХ в режиме динамического торможения Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания. Соедините аппаратуру в соответствии с электрической схемой, приведенной на рисунке 5. Установите переключатели тиристорного преобразователя G3 в следующие положения: «РУЧН.», «Ud = const», «ОТКЛ.», «СТОП». Его регулировочную рукоятку UУПР установите в крайнее левое положение. Регулировочную рукоятку автотрансформатора А5 установите в крайнее левое (против часовой стрелки) положение. Включите устройство защитного отключения и автоматические выключатели однофазного источника питания G1. Включите выключатель «СЕТЬ» указателя частоты вращения Р2. Включите выключатель «СЕТЬ» блока мультиметров Р1. Активизируйте мультиметры блока Р1, задействованные в эксперименте. Включите выключатель «СЕТЬ» автотрансформатора А5. Вращая регулировочную рукоятку автотрансформатора А5 установите ток, протекающий по статорной обмотке двигателя (ток статора асинхронного двигателя не должен превышать 0,3 А). Включите выключатель «СЕТЬ» тиристорного преобразователя G3. Переведите переключатели тиристорного преобразователя G3 в положения: «ВКЛ.» и «ВПЕРЕД». Регулирование частоты вращения МПТ осуществляйте с помощью вращения регулировочной рукоятки UУПР, т.к. критическое скольжение АД с КЗР в режиме динамического торможения находится в зоне частот вращения близких к нулю, то в зоне малых скоростей АД интервал частот вращения для первых пяти точек 16 характеристики должен быть минимально возможным (с шагом не более 5 об/мин). Измерьте значение частоты вращения n с помощью указателя Р2. Измерьте значения напряжения якоря UЯ с помощью измерителя тиристорного преобразователя G3, где Ud = UЯ. Ток якоря IЯ двигателя М2 измерьте с помощью мультиметра блока P1. Данные измерений занесите в таблицу 2. Таблица 2 – Опытные данные при исследовании работы АД в режиме динамического торможения Iя, А 0 Uя, В 0 n, 0 об / мин По завершении эксперимента у автотрансформатора А5 поверните регулировочную рукоятку в крайнее против часовой стрелки положение, отключите выключатель «СЕТЬ». Регулировочную рукоятку UУПР тиристорного преобразователя G3 установите в крайнее против часовой стрелки положение, переведите его переключатели в положение «СТОП» и «ОТКЛ.», отключите выключатель «СЕТЬ». Отключите источник G1. Используя данные таблицы 2, вычислите электромагнитный момент и угловую частоту вращения двигателя М1. M 60 (U Я 65 I Я ) I Я . 2n (18) и занесите его в таблицу 3. 17 Таблица 3 – Расчетные данные при исследовании работы АД в режиме динамического торможения , рад / с М, Нм Используя данные таблиц 2 и 3, постройте электромеханическую характеристику f (I я ) и механическую характеристику f (М ) трехфазного асинхронного двигателя с короткозамкнутым ротором в режиме динамического торможения. 18 Рисунок 5 – Схема электрических соединений 19 218.9 G1 ~ 220 B Я A2 A1 М2 E1 211 G3 В E2 E3 E4 А 510.0.1 P1 А U2 V2 W2 М1 U1 V1 W1 318.2 A5 100.7 B G5 322 А6 506.5 P2 n Содержание отчета. Отчет должен содержать: 1.Технические данные АД с КЗР М1 и МПТ М2. 2.Программу работы. 3.Схему электрических соединений лабораторной установки. 4.Таблицы полученных результатов, и необходимые расчеты. 5.Графики теоретических и экспериментальных зависимостей f ( I ) и f (М ) . 6.Выводы. Контрольные вопросы. 1. Напишите и проанализируйте уравнения ЭМХ и MX АД с КЗР в двигательном и тормозных режимах. 2. Назовите характерные точки естественной и искусственной ЭМХ и MX АД с КЗР в двигательном режиме. Покажите как рассчитываются их координаты. 3. Почему в режимах рекуперативного и динамического торможения, а также торможения противовключением ток статора АД меняет свой знак по отношению к двигательному режиму? 4. Чем характерна ЧВ ИХХ АД с КЗР? 5. Есть ли разница в понятиях MX ЭД и MX ЭП? 20 Список литературы 1. Москаленко, В.В. Электрический привод [Электронный ресурс]: учебник/ А.В. Глазков.- Электрон. текстовые дан.- М.: «ИНФРА-М», 2015.Режим доступа: http://znanium.com/bookread.php?book=443646 2. Поляков, А.Е. Электрические машины, электропривод и системы интеллектуального управления электротехническими комплексами. [Электронный ресурс]: учеб.пособ/ А.Е. Поляков, А.В. Чесноков.- Электрон. текстовые дан.- М.: «ИНФРА-М», 2015.- Режим доступа: http://znanium.com/bookread.php?book=506589 3. Онищенко, Г.Б. Теория электропривода [Электронный ресурс]: учебник/ Г.Б. Онищенко.- Электрон. текстовые дан.- М.: «ИНФРА-М», 2015.Режим доступа: http://znanium.com/bookread.php?book=452841 21