САНКТ-ПЕТЕРБУРГСКИЙ ФИЛИАЛ
ИНСТИТУТА ОКЕАНОЛОГИИ им. П. П. ШИРШОВА
РОССИЙСКОЙ АКАДЕМИИ НАУК
ПРИКЛАДНЫЕ ТЕХНОЛОГИИ
ГИДРОАКУСТИКИ И ГИДРОФИЗИКИ
Труды Всероссийской конференции
Санкт-Петербургский
политехнический университет
Петра Великого
Санкт-Петербург
2024
УДК 551.046.0+551.463.2
ББК 32.875:38.77
П75
Прикладные технологии гидроакустики и гидрофизики : труды Всероссийской конференции. – СПб. : ПОЛИТЕХ-ПРЕСС, 2024. – 465 с.
В сборнике трудов представлены доклады о достижениях отечественных и зарубежных
ученых в области гидрофизики и гидроакустики. Особое внимание уделено результатам фундаментальных исследований и их внедрению при решении прикладных проблем, в том числе
при разработке технологий мониторинга Мирового океана с целью исследования и освоения его
ресурсов, предупреждения природных катастроф и чрезвычайных ситуаций, при изучении рельефа прибрежных акваторий и экономических зон, при обосновании методов и средств борьбы
с подводным терроризмом и минной опасностью, при разработке датчиков и систем контроля
и управления техногенными процессами.
Для научных работников и инженеров, а также для широкого круга специалистов, интересующихся подводной акустикой и гидрофизикой.
Конференция проводилась с 5 по 7 июня 2024 г.
Доклады, включая рисунки, публикуются исключительно в редакции авторов
Оригинал-макет изготовлен
Санкт-Петербургским филиалом Института океанологии им. П. П. Ширшова РАН
ОРГАНИЗАЦИИ-СОУЧРЕДИТЕЛИ
Санкт-Петербургский филиал Института океанологии
им. П. П. Ширшова РАН (СПбФ ИО РАН)
АО «Концерн «Океанприбор»
АО «Концерн «Морское подводное оружие – «Гидроприбор»
Санкт-Петербургское отделение Российской академии наук
Объединенный совет по естественным наукам
Ответственные редакторы:
член-корреспондент РАН А. А. Родионов; доктор технических наук И. А. Селезнёв;
доктор технических наук В. В. Малый; кандидат физико-математических наук Л. В. Григорьев
Редакционная коллегия:
член-корреспондент РАН А. А. Родионов; доктор географических наук А. В. Зимин;
доктор технических наук В. В. Малый; доктор технических наук И. А. Селезнёв;
доктор технических наук Д. Б. Островский; доктор физико-математических наук В. А. Рябченко;
доктор физико-математических наук Д. В. Чаликов; доктор технических наук А. И. Сетин;
доктор технических наук В. Б. Жуков; кандидат технических наук В. А. Попов;
кандидат технических наук Д. А. Никитин; кандидат технических наук К. Г. Погудин;
кандидат технических наук С. А. Мальков; кандидат технических наук В. В. Коваленко;
кандидат физико-математических наук Л. В. Григорьев; кандидат технических наук В. В. Черницкий
ISBN 978-5-7422-8585-4
© Санкт-Петербургский филиал
Института океанологии
им. П. П. Ширшова
Российской академии наук, 2024
© Санкт-Петербургский политехнический
университет Петра Великого, 2024
ST. PETERSBURG DEPARTMENT
OF THE P. P. SHIRSHOV INSTITUTE OF OCEANOLOGY
OF THE RUSSIAN ACADEMY OF SCIENCES
ADVANCED TECHNOLOGIES
OF HYDROACOUSTICS
AND HYDROPHYSICS
Proceedings of All-Russian Conference
Peter the Great
St.Petersburg Polytechnic
University
Saint Petersburg
2024
Advanced Technologies of Hydroacoustics and Hydrophysics : Proceedings of All-Russian
Conference. – St. Petersburg : POLYTECH-PRESS, 2024. – 465 p.
The collection of works presents reports on the achievements of domestic and foreign scientists
in the fild of hydrophysics and hydroacoustics. Special attention is paid to the results of fundamental
research and their implementation in solving applied problems, including the development of technologies for monitoring the World ocean for the purpose of research and development of its resources, the
prevention of natural disasters and emergencies, the study of the relief of coastal waters and economic
zones, the justifiation of methods and means of combating underwater terrorism and mine danger, the
development of sensors and systems for monitoring and managing technogenic processes.
For scientists and engineers, as well as for a wide range of specialists interested in underwater
acoustics and hydrophysics.
The conference was held in St. Petersburg from 5 to 7 June 2024.
The Papers publish reports (including drawings, formulas, etc.) in the editorial office of the authors
of the reports
The original layout was made in the St. Petersburg branch
of the Institute of Oceanology of the Russian Academy of Sciences
ORGANIZATIONS CO-FOUNDERS
Р. P. Shirshov Institute of Oceanology of the Russian Academy of Sciences,
St. Petersburg Department
JSC «Concern «Oceanpribor»
JSC «Concern «Sea Underwater Weapon – Gidropribor»
St. Petersburg Branch of the Russian Academy of Sciences
Joint Council for Natural Sciences
Executive Editors:
Сorr. мember of RAS А. A. Rodionov, Dr.Sc. I. A. Seleznev,
Dr.Sc. V. V. Malyj, Ph.D. L. V. Grigoryev
Editorial Board:
Сorr. мember of RAS А. A. Rodionov; Dr.Sc. A. V. Zimin; Dr.Sc. V. V. Malyj;
Dr.Sc. I. A. Seleznev; Dr.Sc. D. B. Ostrovsky; Dr.Sc. V. A. Ryabchenko;
Dr.Sc. D. V. Chalikov; Dr.Sc. A. I. Setin; Dr.Sc. V. B. Zhukov;
Ph.D. V. A. Popov; Ph.D. D. A. Nikitin; Ph.D. K. G. Pogudin;
Ph.D. S. A. Malkov; Ph.D. V. V. Kovalenko;
Ph.D. L. V. Grigoryev; Ph.D. V. V. Chernitsky
ISBN 978-5-7422-8585-4
© St. Petersburg Department
of the P. P. Shirshov Institute
of Oceanology
of the Russian Academy of Sciences, 2024
© Peter the Great
St. Petersburg Polytechnic University, 2024
ОРГАНИЗАЦИОННЫЙ КОМИТЕТ
XVII ВСЕРОССИЙСКОЙ КОНФЕРЕНЦИИ
«ПРИКЛАДНЫЕ ТЕХНОЛОГИИ ГИДРОАКУСТИКИ
И ГИДРОФИЗИКИ» ГА-2024
Председатель оргкомитета
Родионов Анатолий Александрович, член-корреспондент РАН, засл. деятель науки РФ, профессор
(ИО РАН, руководитель научного направления «Фундаментальная и прикладная гидрофизика»
Санкт-Петербургского филиала)
Сопредседатель оргкомитета
Селезнев Игорь Александрович, д-р техн. наук, доцент (АО «Концерн «Океанприбор», заместитель
генерального директора−руководитель приоритетного технологического направления (научный
руководитель Концерна), Санкт-Петербург)
Члены оргкомитета
Румянцев В. А., советник президиума РАН, СПбНЦ РАН, академик РАН;
Филатов Н. Н., советник генерального директора, ИВПС КарНЦ РАН, член-корреспондент РАН;
Лобанов А. А., директор СПбФ ИО РАН, д-р техн. наук;
Боровская А. В., ведущий инженер, СПбФ ИО РАН;
Вертешев С. М., Псковский политехнический университет, д-р техн. наук, профессор;
Григорьев Л. В., доцент, СПбГУ, канд. физ.-мат. наук;
Гурьев Ю. В., зав. кафедрой механики и гидромеханики ВУНЦ ВМФ ВМА, ВМИИ, д-р техн. наук,
профессор;
Долин Л. С., глав. науч. сотрудник, ИПФ РАН, канд. физ.-мат. наук;
Емельянов В. Н., зав. кафедрой «Плазмогазодинамика и теплотехника», БГТУ «ВОЕНМЕХ»
имени Д. Ф. Устинова, д-р техн. наук, профессор;
Зенченко С. С., начальник сектора, ФГУП «Крыловский научный центр», д-р техн. наук;
Зимин А. В., зав. лабораторией, СПбФ ИО РАН, д-р геогр. наук, доцент;
Каверинский А. Ю., начальник отделения, АО «ЦКБ МТ «Рубин», канд. техн. наук;
Кедрова Е. В., начальник отдела, АО «Концерн «Океанприбор»;
Легуша Ф. Ф., зав. кафедрой, СПбГМТУ, д-р физ.-мат. наук, профессор;
Малый В. В., вед. науч. сотрудник, АО «Концерн «Океанприбор», д-р техн. наук, профессор;
Микушин И. И., доцент, НИЦ РЭВ и ФИР ВМФ НИИ ОСИС ВМФ ВУНЦ ВМФ «ВМА», д-р техн.
наук;
Печковский П. Г., зам. ген. директора, АО «Корпорация морского приборостроения», д-р техн. наук;
Погудин К. Г., ученый секретарь, АО «Концерн «МПО-Гидроприбор», канд. техн. наук;
Попов В. А., доцент, АО «Концерн «Океанприбор», канд. техн. наук, доцент;
Сетин А. И., зав. кафедрой, СПбГМТУ, д-р техн. наук;
Черницкий В. В., ст. науч. сотрудник, СПбФ ИО РАН, канд. техн. наук, доцент;
Щеголихин В. П., глав. науч. сотрудник, ЦНИИ КиВ ВУНЦ ВМФ ВМА, д-р техн. наук, профессор.;
Малова Т. И., ученый секретарь, СПбФ ИО РАН, канд. геогр. наук;
Башмакова Н. В., ведущий инженер, СПбФ ИО РАН;
Филин К. Б., начальник лабораторного комплекса, СПбФ ИО РАН.
ORGANIZING COMMITTEE
OF XVII ALL-RUSSIAN CONFERENCE
«ADVANCED TECHNOLOGIES OF HYDROACOUSTICS AND HYDROPHYSICS»
Chairman of the organizing Committee
Anatoly Rodionov, Corresponding Member of the Russian Academy of Sciences, Honored scientist of the
Russian Federation, Professor (IO RAS, Head of the scientific direction «Foundation and applied
Hydrophysics» of the Saint-Petersburg Department, Saint-Petersburg)
Organizing Committee co-chairman
Igor Seleznev, Doctor of Technical Sciences, associate Professor (JSC «Concern «Oceanpribor»,
Deputy General Director — Head of the priority technological direction (Scientific supervisor of the
Concern), Saint-Petersburg)
Members of the organizing committee
Rumyantsev V. A. (Saint-Petersburg);
Filatov N. N. (Pskov)
Lobanov A. A. (Saint-Petersburg);
Borovskaya A. V. (Saint-Petersburg);
Verteshev S. M. (Pskov);
Grigoryev L. V. (Saint-Petersburg);
Guryev Yu. V. (Saint-Petersburg);
Dolin L. C. (Nizhniy Novgorod);
Emelyanov V. N. (Saint-Petersburg);
Zenchenko S. C. (Saint-Petersburg);
Zimin A. V. (Saint-Petersburg);
Kaverinsky A. Yu. (Saint-Petersburg);
Kedrova E. V. (Saint-Petersburg);
Legusha F. F. (Saint-Petersburg);
Malyj V. V. (Saint-Petersburg);
Mikushin I. I. (Saint-Petersburg);
Pechkovsky P. G. (Saint-Petersburg)
Pogudin K. G. (Saint-Petersburg);
Popov V. A. (Saint-Petersburg);
Setin A. I. (Saint-Petersburg);
Chernilsky V. V. (Saint-Petersburg);
Shchegolikhin V. P. (Saint-Petersburg);
Malova T. T. (Saint-Petersburg);
Bashmakova N. V. (Saint-Petersburg);
Filin K. B. (Saint-Petersburg).
ПЛЕНАРНЫЕ ДОКЛАДЫ
МОДЕЛИ ГИДРОМЕХАНИКИ И АКТУАЛЬНЫЕ НАПРАВЛЕНИЯ
ИССЛЕДОВАНИЙ В ИНТЕРЕСАХ СОВЕРШЕНСТВОВАНИЯ
МОРСКОЙ ДЕЯТЕЛЬНОСТИ
А. А. Родионов1,2, чл.-корр. РАН
1
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
2
Санкт-Петербургский научный центр РАН, Санкт-Петербург, Россия
HYDROMECHANICS MODELS AND CURRENT RESEARCH DIRECTIONS
IN THE INTEREST OF MARINE ACTIVITIES IMPROVEMENT
A. A. Rodionov, Сorr. мember of RAS
1
Shirshov Institute of Oceanology, RAS, Moscow, Russia
2
St. Petersburg Scientific Center of the RAS, St. Petersburg, Russia
В докладе проанализированы итоги проведения предыдущих конференций. Описываются модели
гидромеханики. Сделан краткий обзор информации по состоянию и перспективным направлениям
развития гидроакустики, гидрофизики и обеспечивающих отраслей науки и техники. Более подробно
представлены результаты исследований субмезомасштабных процессов и явлений в океане, оказывающих
влияние на эффективность применения средств подводного наблюдения.
The report presents the analysis of the previous conferences results. Hydromechanics models are described.
A brief review of information on the state and perspective development directions in hydroacoustics, hydrophysics
and supporting branches of science and technology is made. The results of studies of submesoscale processes and
phenomena in the ocean that affect the effectiveness of underwater observation tools use are presented in details.
Конференция «Прикладные технологии гидроакустики и гидрофизики». Научнотехническая конференция «Прикладные технологии гидроакустики и гидрофизики» проводится
с 1993 г. — уже более 30 лет. Цель конференции — развитие фундаментальных, поисковых и
прикладных исследований и разработок в области гидрофизики, анализ достоверности, научной
и практической значимости результатов участников, обмен информацией по актуальным
проблемам между участниками, научной общественностью Санкт-Петербурга и других регионов
России, а также зарубежных научных центров. К настоящему времени сложились следующие
тематические направления конференции:
− технологии гидроакустики и гидрофизики для мониторинга Мирового океана;
− динамика и гидродинамика морских мобильных объектов;
− физические поля морских природных и искусственных объектов и их взаимодействие;
− гидроакустические и гидрофизические преобразователи, датчики и антенные системы;
− методы и средства экологических исследований акваторий;
− гидробионика и биоакустика.
Всего на конференциях ГА-1993 – ГА-2022 состоялось около 1800 докладов; приняли
участие более 2400 человек. Число организаций-участников возросло с 15 до 70. На ГА-2024
представлено около 130 докладов, участвуют более 100 докторов и кандидатов наук.
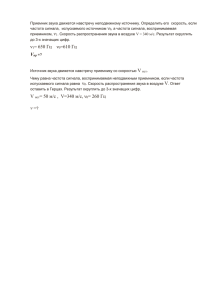
В последние 10−15 лет возросло количество молодых участников. Повторяемость
присутствия участников — 60–70 %. На рис. 1 показана статистика проведения конференции с
момента зарождения и до настоящего времени. Рост показателей конференции замедлился в 2020
и 2022 гг. в связи с эпидемией. Вместе с тем рост количества участников и докладов в 2024 г.
свидетельствует об актуальности тематики конференции.
7
Пленарные доклады
Рис. 1. Статистика Всероссийской конференции «Прикладные технологии гидроакустики
и гидрофизики» (по ГА-2024 предварительные данные)
Модели гидромеханики и их приложения в интересах решения задач морской
деятельности. Физические закономерности лежат в основе взаимодействия человека и природы.
Для рационального планирования морской деятельности необходимо адекватно понимать и
корректно применять на практике методы и средства, основанные на различных моделях
гидромеханики. В табл. 1 приведены в обобщённом виде основные модели гидромеханики,
процессы и явления, и задачи морской деятельности, решаемые в рамках этих моделей.
Таблица 1
Модели морской
среды
Процессы и явления в морской среде
Задачи морской деятельности
Идеальная
Волновые процессы в морской среде
Обеспечение морского
транспорта и безопасности
плавания.
Вязкая
несжимаемая
Волно-вихревые процессы при обтекании
морских объектов.
Природные гидрофизические процессы и
явления в широком диапазоне условий.
Вязкая сжимаемая
Гидроакустические и гидрофизические
процессы и явления.
Освещение подводной
обстановки.
Обеспечение скрытности и
защиты объектов.
Применение оружия и
технических средств.
Мониторинг и прогноз
экологического состояния.
Обеспечение хозяйственной
деятельности.
Нелокальная с
запаздыванием
Неравновесные процессы и движения
(течения) сложно структурированных сред.
Решение задач в экстремальных
условиях.
Модель идеальной жидкости и закономерности морского волнения. Модель идеальной
жидкости далеко не исчерпала возможности для получения новых практически важных
результатов. Она применима для изучения физических свойств морского волнения. На основе
современных методов прямого численного моделирования проведены оценки статистических
характеристик развивающегося волнения [1]. В ходе исследований показано, что распределение
вероятностей для четырёх статистических моментов высоты волн, нормированной на
характерную высоту Hs — не меняется во времени. На рис. 2 показаны вероятности
нормированных возвышений для 6 временных отрезков развивающегося волнения: t=500; t=900;
8
Пленарные доклады
t=1600; t=2300; t= 3800; t=6000 (практически они сливаются) [1]. Этот результат свидетельствует
об автомодельности развивающегося поверхностного волнения.
Модель вязкой несжимаемой жидкости. В гидродинамике океана при условии малости
вертикальных скоростей течений по сравнению с горизонтальными разработано и успешно
применяется гидростатическое приближение. Вместе с тем при моделировании процессов в
проливных зонах, в подобластях выраженного рельефа типа подводной горы, подводной гряды,
барьеров и рифов это приближение нарушается. Необходимо решать задачи на основе полной
гидродинамической модели. В работах [2, 3] приведены результаты численных экспериментов
на основе оригинальной модели в гидростатической (Гс) и негидростатической (Нг) постановках.
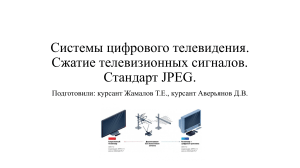
На примере Четвертого Курильского пролива показано, что учет динамической
компоненты давления необходим для корректного определения транспорта через Курильские
проливы. На рис. 3 приведён график транспорта воды через пролив за приливной период
полусуточной волны М2 в Гс- и Нг-постановках (пунктирная линия — Гс, средний 0,077 Sv;
сплошная — Нг; средний — 0,033 Sv). Сравнение показывает необходимость моделирования
склоновой и приливной динамики в полной постановке.
Решение задач в полной гидродинамической постановке необходимо при описании
субмезомасштабных процессов обтекания подводных препятствий и технических сооружений, в
том числе подводных стационарных и мобильных объектов. Для примера приведём результаты
решения задач обтекания подводного препятствия двухслойной жидкостью (перепад плотности
4 у.е., глубина места H=50 м, глубина слоя скачка 20 м, скорость потока и диаметр тела
соответственно U= (0,5−2) м/с, D = 20 м [4]. Основными безразмерными критериями подобия для
2
𝐷𝐷
данной задачи являются: число Фруда Fr = U �(gH); число Струхаля Sh = , где T — период
𝑇𝑇∙𝑈𝑈
процесса; g — ускорение свободного падения.
Моделирование осуществлялось на основе гибридной модели RANS-LES (RANS —
Reynolds Averaged Navier Stokes, LES — Large Eddy Simulations), решение в среде Open FOAM,
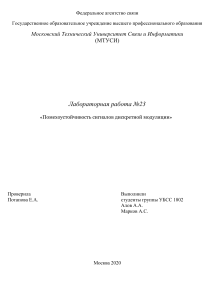
шаг сетки от 0,005 м до 5 м. На рис. 4, 5 показаны примеры результатов расчётов.
Рис. 2.
Рис. 3.
Рис. 4. Явное разрешение моделью вихревых
структур по методу RANS-LES
Рис. 5. Волновой след
за подводным препятствием
9
Пленарные доклады
В ходе численных экспериментов получены следующие результаты. Выявлена
инвариантность процессов обтекания препятствия при изменении скорости набегающего потока
— числа Струхаля Sh=0,75 (Fr=0,0017); Sh=0,65 (Fr=0,0068) и Sh=0,66 (Fr=0,0272). Характерные
масштабы вихревых структур лежат в пределах 0,5−1 диаметра препятствия. Длины внутренних
волн находятся в диапазоне 2−3 диаметров. При скорости потока, сравнимой со скоростью
свободных внутренних волн, вихревые структуры вносят значимый вклад в волновое поле.
С увеличением скорости набегания превалируют волны от вихревых структур.
Модель вязкой сжимаемой жидкости. Гидродинамика и гидроакустика. Уравнения
гидромеханики в полной постановке описывают течения с учётом сжимаемости. Вместе с тем,
даже с учётом современных IT-технологий их решение для практически важных случаев не
представляется возможным. Поэтому уравнения разделены для моделирования отдельно
гидрофизический и гидроакустической составляющих. В плане решения прикладных задач
является актуальным:
− совместное моделирование для одного и того же сценария гидроакустических и
гидрологических полей (в т.ч. гидроакустических средств и канала распространения энергии), а
также алгоритмов согласованной со средой обработки информации;
− обоснование требований к выходным характеристикам системы оперативной
океанографии.
На конференции будут доложены результаты реализации лучевых, волновых моделей в
гидроакустике и высокоразрешающих негидростатических гидродинамических моделей в
программно-аппаратном комплексе моделирования функционирования гидроакустических
средств в оперативно важных районах Мирового океана. Результаты моделирования позволили
оценить требования к выходной информации оперативной океанографии [5].
Модели нелокальной гидромеханики. Нелокальные модели применены при
значительном отклонении систем от локального термодинамического равновесия, т. е. модели
описывают:
− сильнонеравномерные процессы — высокие градиенты термодинамических
характеристик;
− сложноструктурированные среды — турбулентность, волно-вихревые процессы,
гетерогенные среды.
В нелокальной гидродинамике потоки и силы связаны соотношением [6, 7].
=
J ( r, t )
t
∫ dt ′∫ dr′ K ( r, r′, t , t ′) ⋅ G ( r′, t ′) ,
−∞
V
где J (r, t) — термодинамические потоки; G (r, t) — термодинамические силы;
K (r, r’, t, t’, ε, γ) — интегральные ядра переноса с параметрами нелокальности ε, γ.
Рис. 6.
10
Пленарные доклады
Вблизи локального термодинамического равновесия: K (ε, γ) — δ-образная функция;
J (r, t) = k G (r, t) при ε, γ → 0; k — коэффициенты переноса в классической гидродинамике.
На рис. 6 приведены результаты расчёта высокоскоростного движения тела в водной среде
— зависимость нормированной скорости движения тела (на скорость звука) от нормированного
пройденного расстояния. Из графиков видно, что результаты расчёта по нелокальной модели
более адекватно описывают результаты эксперимента.
Направления
дальнейших
исследований
в
области
гидроакустики
и гидрофизики. Методология проведения исследований предполагает корректное
использование разработанных или обоснование новых моделей гидромеханики. В табл. 2
приведены основные направления и ожидаемые результаты исследований в области
гидроакустики и гидрофизики.
Таблица 2
№
1
Основные направления
Фундаментальные теоретические и
экспериментальные исследования в области
гидромеханики океана и сопредельных сред.
2
Фундаментальные и прикладные исследования
процессов и явлений на стыке гидродинамики и
гидроакустики.
Проведение исследований и отработка технологий
оперативной океанографии в интересах решения
прикладных задач.
Развитие методов согласованной со средой
обработки информации в гидроакустике и
гидрофизике.
3
4
5
6
7
Разработка комплексных распределённых в
пространстве методов экспериментальных
исследований и решения прикладных задач, в т.ч. на
полигонах.
Разработка перспективных гидроакустических и
гидрофизических средств измерений и обнаружения
локальных и распределённых объектов.
Обоснование методов принятия управленческих
решений и оценки эффективности комплексных
морских систем решения прикладных задач.
Ожидаемые результаты
Закономерности в рамках идеальной и
вязкой жидкости.
Обобщенная нелокальная
гидромеханика.
Теория, закономерности и
прикладные методы и методики.
Система в интересах решения
хозяйственных, оборонных и
экологических задач.
Реализация методов при создании и
применении средств с учетом
возможностей оперативной
океанографии.
Внедрение в практику
экспериментальных работ. Создание
специализированных полигонов.
Экспериментальные макеты, опытные
образцы, серии.
Интеллектуальные системы принятия
решений.
Перечень вопросов, приведенных в таблице не полон. Он должен быть расширен и уточнен
в ходе работы конференции.
На наших конференциях подводятся и обсуждаются итоги научной деятельности,
намечаются планы на будущее, рождаются новые идеи и завязываются знакомства, которые
часто перерастают в сотрудничество и дружеские отношения. Конференция живет, потому что
активные участники и организаторы вкладывают душу и энергию в её проведение. Наш девиз:
«Вперед! К новым вершинам науки и техники».
Литература
1. Родионов А. А. и др. Российская академия наук в 300-летней истории становления гидрофизики
и океанологии в Санкт-Петербурга − Ленинграде / Под ред. А. А. Родионова. СПб.: ПОЛИТЕХ-ПРЕСС,
2024. 108 с.
2. Родионов А. А., Андросов А. А, Фофонова В. В., Кузнецов И. С., Вольцингер Н. Е. Моделирование
приливной динамики северных проливов курильской гряды // Фундаментальная и прикладная
гидрофизика. 2021. Т. 14, № 3. С. 20–34. doi: 10.7868/S2073667321030023.
11
Пленарные доклады
3. Вольцингер Н. Е., Андросов А. А. Моделирование длинноволновой негидростатической
динамики на горном рельефе. СПб.: ПОЛИТЕХ-ПРЕСС, 2022. 169 с.
4. Ванкевич Р. Е., Родионов А. А. Численное исследование закономерностей генерации
субмезомасштабных возмущений при обтекании элементов подводного рельефа // 2020. Т. 13, № 4.
С. 27−38. doi: 10.7868/S2073667320040036.
5. Родионов А. А., Малеханов И. А., Сергеев В. А., Никитин Д. А., Ванкевич Р. Е., Дёмин С. П.,
Кулинич В. В. Компьютерное моделирование согласованной со средой обработки гидроакустических
сигналов // Тр. всерос. конф. «Прикладные технологии гидроакустики и гидрофизики». 2024. (в печати).
6. Хантулева Т. А., Родионов А. А.
Нелокальная гидродинамика. Подходы к описанию
турбулентных течений реальных сред // Тр. всерос. конф. «Прикладные технологии гидроакустики и
гидрофизики». ГА-2022. СПб.: Издательство «ЛЕМА», 2023. С. 43−49.
7. Родионов А. А., Хантулева Т. А. Нелокальная модель проникания твердого тела в
конденсированную среду // Изв. ВУЗов «Физика». 2013.
12
Пленарные доклады
ОТ «СЛУХОВОЙ ТРУБКИ» К КОНФОРМНОЙ АНТЕННЕ. ИСТОРИЯ
АО «КОНЦЕРН «ОКЕАНПРИБОР» — 75 ЛЕТ РАЗВИТИЯ СИСТЕМ
ШУМОПЕЛЕНГОВАНИЯ
И. А. Селезнев, д-р техн. наук
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
FROM TRUMPET TO CONFORMAL ANTENNA. HISTORY
OF JSC «CONCERN «OCEANPRIBOR» — 75 YEARS
OF PASSIVE LISTENING SYSTEM DEVELOPMENT
I. A. Seleznev, Dr.Sc.
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В статье представлена история предприятия, всей гидроакустики и особенности конструкции и
режимов работы гидроакустических комплексов от первых до современных.
The article presents the history of the enterprise, entire hydroacoustics as well as design features and operation
modes of first and modern integrated sonar systems.
В июне 2024 г. исполняется 75 лет АО «Концерн «Океанприбор» — флагману российской
прикладной гидроакустики. Ведущий свою историю от КБ-206, носящий последовательно
наименования НИИ-3, НИИ, а затем ЦНИИ «Морфизприбор», институт на всех этапах своего
последовательного развития являлся лидером отрасли гидроакустического приборостроения,
монополистом в области создания гидроакустических комплексов для подводных лодок, а с
середины 1990-х гг. вернул себе монопольное положение в области создания ГАК для надводных
кораблей. Значимы успехи предприятия в создании стационарных систем и комплексов
освещения подводной обстановки, поисково-обследовательских систем, гидроакустических
антенн, преобразователей и т.д.
Приоритетными направлениями деятельности интегрированной структуры определены
разработка, производство, обслуживание и модернизация гидроакустической техники для
кораблей Военно-морского флота, а также гидроакустических средств гражданского назначения.
Наиболее сложным и наукоемким режимом работы любого гидроакустического комплекса
является режим шумопеленгования — система, регистрирующая первичное (порождаемое
самим объектом наблюдения) гидроакустическое поле, и позволяющая решать задачи
обнаружения объекта, его целеуказания и классификации по первичному полю.
Первым упоминанием о режиме шумопеленгования в гидроакустике можно считать
запись в дневниках гениального итальянца Леонардо да Винчи, еще в конце 15 века [1]. Важно
отметить, что задачу обнаружения и целеуказания Леонардо предлагал решать именно с
использованием метода шумопеленгования — по первичному звуковому полю, определяя
направление на источник звука за счет изменения положения направленного приемника
(рупора), без использования многоканальной антенны (рис. 1).
Первой практической реализацией режима шумопеленгования в России, а может быть, и в
мире, следует считать разработку 1912 г. российского ученого Р. Г. Ниренберга, сотрудника
гидрофонической мастерской Балтийского завода.
История создания отечественных шумопеленгаторных станций ведет свой отсчет с августа
1935 г., когда начальник НИМИС (научно-исследовательского морского института связи)
А. И. Берг передал на завод «Водтрансприбор» заявку на разработку ряда опытных образцов
гидроакустического вооружения, в том числе двух шумопеленгаторов для катеров — малых
охотников — вооружения легких сил противолодочной обороны.
Фактически, он представлял собой реализацию «слуховой трубы» Леонардо да Винчи,
дополненную двумя приемными элементами с целью реализации бинаурального эффекта.
В период с 1935 по 1939 г. велось серийное производство ШП «Посейдон».
Шумопеленгатор представлял собой простейший прибор, предназначенный для определения
направления на шумящие объекты (рис. 2). Дальность действия шумопеленгаторной станции
(ШПС) «Посейдон» составляла 1,5−2 км, точность пеленгования 3−6°.
13
Пленарные доклады
Рис. 1. «Слуховая труба» Леонардо да Винчи
Рис. 2. Шумопеленгатор «Посейдон»
1 — полые резиновые приемники звука; 2 — защитная
труба; 3 — слуховые трубки; 4 — крепежный вал;
5 — стетоскоп; 6 — штурвал; 7 — диск со шкалой
Рис. 3. Расположение приборов шумопеленгаторной
станции «Марс» на подводной лодке
Рис. 4. Конформная антенна ГАК «Лира»
1 — гидрофоны; 2, 3 — кабельные коробки;
4 — компенсатор; 5 м — усилитель; 6 — фильтр;
7 — головные телефоны
Более совершенной разработкой являлась ШПС «Марс» (рис. 3). Точность определения
направления на шумящий объект составляла 1,5–3°. Дальность обнаружения крупных судов и
боевых кораблей достигала 18 км. ШПС также обеспечивала определение типа обнаруженных
целей. К началу Великой Отечественной войны завод 206 (ныне — завод «Водтрансприбор»)
изготовил 188 комплектов ШПС «Марс», из них 176 были установлены на ПЛ. Основным
недостатком ШПС «Марс» довоенного выпуска было то, что они могли работать только на малых
скоростях ПЛ.
14
Пленарные доклады
Таблица 1
Разработки в период после ВОВ
Название
Годы разработки
Дальность пеленгования
Носитель
Дальность пеленгования
надводного корабля на ходу
ПЛ 15 уз в подводном
положении – 40 каб
ПЛ среднего и большого
водоизмещения
ШП «Феникс»
1950
ШП «Анадырь»
1953−1957
ШП «Арктика»
ШП «Арктика-М»
ШП «Арктика-2М
1952−1960
В пассивном режиме
дальность сопровождения
цели — крейсера, идущего
со скоростью 20 уз, при
скорости ПЛ 25 уз, идущей
на глубине 50-60 м — не
менее 50 каб
МГАК «Рубин»
1959−1968
ГАК «Океан»
1961
Малогабаритный ГАК
"Рубикон"
ГАК «Скат»
ГАК «Скат-БДРМ»
ГАК «Скат-Плавник»
ГАК «Скат-3» (первый
цифровой)
ГАК «Иртыш-Амфора»
На скоростях ПЛ 35-40 уз;
− дальность ШП целей —
100 каб;
− дальность ЭП целей —
50 каб;
дальность связи между ПЛ
— 200 каб
Для обнаружения
малошумных ПЛ и
выработка целеуказания
оружию для их
уничтожения.
1966−1973
1966−1982
ГАК для решения задач
обнаружения как
малошумных, так и
сильношумящих целей
с 1976 по 2010-е
годы
Малые ПЛ проекта
А-615
«Арктика» — ПЛ пр.
627, 629, 653, 658, 659,
611, 633, 641
«Арктика-2М - ПЛ пр.
619, 627А, 629, 629А,
629Р, 633, 641, И641К,
И641М, 651.ю 651Э,
659Т, 675, 658М.
Производство
прекращено в 1983 г.
ПЛ проектов 661, 671 и
671 РТ.
Снят с производства в
1976 г.
ПЛ проектов 705, 705К,
611АВ
Дизельэлектрические и
атомные ПЛ.
ГАК «Скат-3» на ПЛ
пр.971
ПЛ 4 поколения пр. 955
(Борей) и пр. 885 (Ясень)
Таким образом, в послевоенный период отечественная прикладная гидроакустика вошла с
малоэлементными (до 24 элементарных каналов) ШПС типа «Марс», установленными в носовой
оконечности ПЛ (табл. 1). Именно это следует считать точкой отсчета деятельности ЦНИИ
«Морфизприбор» (тогда еще НИИ-3), созданного в 1949 г.
И наконец, выдающимся достижением специалистов АО «Концерн «Океанприбор» в
области проектирования гидроакустических антенн для ГАК ПЛ стало создание первой в России
комформной (повторяющей обводы корпуса носителя) антенны для ГАК «Лира» (рис. 4),
установленного на дизель-электрической подводной лодке «Лада». Создание этой антенны,
позволившее существенно повысить эффективность работы ГАК в режиме шумопеленгования
за счет увеличения апертуры антенны, открыло дорогу новому поколению ГАК с конформными
антеннами, как для модернизируемых носителей 4-го поколения, так и для перспективных ГАК
ХХI века.
Таким образом, за довольно короткий период времени (75 лет) учеными и инженерами
НИИ-3 — ЦНИИ «Морфизприбор» — АО «Концерн «Океанприбор» был совершен огромный
15
Пленарные доклады
прорыв в области проектирования гидроакустического вооружения, в том числе сложнейших
многоэлементных гидроакустических антенн (от 24 шт. в изд. «Марс» до нескольких тысяч в изд.
«Лира»), аппаратно-программных комплексов, обеспечивающих обработку информации от этих
антенн в режиме реального времени, введено более десятка новых режимов работы ГАК.
Созданы реальные предпосылки для построения систем подводного наблюдения,
обрабатывающих совместно информацию от физических полей различной природы,
объединяющих в рамках единого информационного пространства датчики, размещенные на
носителе, и на выносных роботизированных устройствах, взаимодействующих совместно с ним.
Начато проектирование гидроакустического вооружения для носителей нового поколения,
решающих еще больший объем задач, имеющих более высокие требования к эффективности
ГАК. И наличие в стране сильного научного коллектива, с огромным опытом проектирования
уникальных технических систем, своей научной школой, современным комплексом
испытательных средств и полигонов, системой подготовки кадров позволяет считать решение
этих научных проблем абсолютно реальной задачей.
Литература
1. Александров Г. А. и др. «АО «Концерн «Океанприбор». Исторический очерк//СПб, Наука, 2009.
2. Александров Г. А., Белявский О. К., Селезнев И. А., Шампаров А. И. Страницы истории
предприятия (по мат. музея) // Гидроакустика. 2009. № 9. С. 139−150.
3. Попов В. А., Селезнев И. А. Судьбы российских инженеров (Р. Г. Ниренберг и др.) //
Гидроакустика. 2012. № 15. С. 126−142.
4. Полканов К. И., Селезнев И. А. Российская гидроакустика. Первые шаги // Тр. всерос. конф.
«Прикладные технологии гидроакустики и гидрофизики». 2014. С. 5−9.
5. Беркутов Р. Н., Попов В. А., Селезнёв И. А. Отечественная акустика и военная гидроакустика до
1917 г. // Гидроакустика. 2015. № 21 (1). С. 97−105.
6. Беркутов Р. Н., Попов В.А., Селезнёв И.А. Отечественная военная гидроакустика в первые годы
советской власти (1917−1933 гг.) // Гидроакустика. 2015. № 22 (2). С. 110−120.
7. Беркутов Р. Н., Попов В. А., Селезнев И. А. Отечественная военная гидроакустика накануне
Великой Отечественной войны (1934−1941) Часть 1 // Гидроакустика. 2015. № 23 (3). С. 96−106.
8. Беркутов Р. Н., Попов В. А., Селезнёв И. А. Отечественная военная гидроакустика накануне
Великой Отечественной войны (1934−1941) Часть 2 // Гидроакустика. 2016. № 25 (1). С. 94−104.
9. Беркутов Р. Н., Попов В. А., Селезнёв И. А. Военная гидроакустика в период Великой
Отечественной войны (1941−1945) // Гидроакустика. 2016. № 27 (3). С. 90−105.
10. Беркутов Р. Н., Попов В. А., Селезнев И. А. Развитие отечественных гидроакустических средств
в послевоенный период (1946−1955) (Первая часть) // Гидроакустика. 2016. № 28 (4). С. 91−106.
16
Пленарные доклады
80 ЛЕТ ИСТОРИИ РАЗВИТИЯ ОТРАСЛЕВОЙ НАУКИ
В АО «КОНЦЕРН «МОРСКОЕ ПОДВОДНОЕ ОРУЖИЕ – ГИДРОПРИБОР»
К. Г. Погудин, канд. техн. наук
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
80 YEARS OF HISTORY OF THE DEVELOPMENT OF INDUSTRIAL SCIENCE
IN THE JSC «CONCERN «SEA UNDERWATER WEAPON – GIDROPRIBOR»
K. G. Pogudin, Ph.D.
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Представлен краткий очерк о истории создания и развития АО «Концерн «Морское подводное оружие –
Гидроприбор». Приведен обзор некоторых направлений научной деятельности и достижений
организации.
The brief outline of the history of creation and development JSC «Concern «Sea Underwater Weapon –
Gidropribor» is presented. An overview of some areas of scientific activity and achievements of the organization
is given.
11 февраля 1944 г. приказом Народного Комиссара судостроительной промышленности
(на основании Постановления Государственного Комитета Обороны от 15 сентября 1943 г.) на
площадях бывшего опытного завода 231 НКСП и базы катеров ЦКБ-36 был образован Научноисследовательский Минно-Торпедно-Тральный институт (НИИ № 400 НКСП), носящий теперь
наименование АО «Концерн «Морское подводное оружие – Гидроприбор» [1].
Кадровая основа созданного института была сформирована из сотрудников ЦКБ-36,
ЦКБ-39 и военных инженеров [2]. В первые годы шла работа по созданию научно-технической
базы, модернизации уже освоенных промышленностью и флотом образцов, а также по изучению
иностранных, в первую очередь немецких, мин, торпед и тралов. К началу 1950-х годов назрела
острая необходимость проведения собственных научно-исследовательских работ и возникла
потребность в специалистах высшей квалификации, способных решать научные проблемы и
создавать опережающий научно-технический задел, поэтому уже в 1949 гг. при институте была
организована аспирантура и создан ученый (диссертационный) совет [3].
Деятельность института в 1950-1970-е годы была направлена на проведение комплексных
теоретических и экспериментальных исследований в обоснование программ перевооружения
ВМФ современным подводным оружием и их практической реализации. К этим исследованиям
были привлечены различные НИИ, научные организации ВМФ, НИИ Академии наук,
крупнейшие ученые, ведущие военные специалисты.
В 1969 г. НИИ-400 был преобразован в ЦНИИ «Гидроприбор» и становится головным
предприятием отрасли. В 1972 г. создан филиал в г. Уральске, в 1974 г. — филиал «Касатка»
(Гагры). В 1973 г. ЦНИИ «Гидроприбор», его филиалы и завод «Двигатель» вошли в состав НПО
«Уран», которое просуществовало до 1991 г.
В июне 1994 г. ЦНИИ «Гидроприбор» был присвоен статус Государственного научного
центра (ГНЦ) Российской Федерации, что является официальным признанием заслуг института
в создании высокоэффективных систем подводной техники, формировании уникальной
отечественной школы специалистов морского оружия.
В 2004 г. ФГУП ЦНИИ «Гидроприбор» преобразован в ОАО «Концерн «Морское
подводное оружие – Гидроприбор», в состав которого вошли ОАО «НИИ мортеплотехники»,
ОАО «Завод «Двигатель» и ОАО «Завод «Дагдизель». В дальнейшем в состав концерна вошли
ОАО «Уралэлемент», ЗАО «Электротяга» и АО «НПЦ «Сонар».
В 2015 г. Указом Президента России АО «Концерн «Морское подводное оружие –
Гидроприбор» было включено в состав АО «Корпорация «Тактическое ракетное вооружение».
За весь период деятельности учеными и специалистами организации было разработано и
передано флоту более 180 образцов торпедного, минного, противоминного оружия, приборов
гидроакустического противодействия и другой специальной техники (в том числе 70 образцов и
модификаций торпед, 48 образцов и модификаций мин и минных комплексов),
отдельные из которых в течение многих лет не имели, а некоторые и до настоящего
17
Пленарные доклады
времени не имеют зарубежных аналогов.
За заслуги в создании новой техники коллектив объединения был награжден орденом
Трудового Красного Знамени (1966 г.) и орденом Октябрьской Революции. (1982 г.). Высоко
оценен вклад сотрудников института в развитие отечественной науки и техники: двенадцати
сотрудникам присуждены ленинские премии, свыше сорока — государственные премии. За
успешные разработки новых видов оружия и вооружения 421 сотрудник института награжден
орденами и медалями нашей страны. За время существования организации получено более 5000
патентов и авторских свидетельств. Подготовлено 40 докторов и около 350 кандидатов наук.
У истоков образования научной школы концерна стоят ветераны Великой Отечественной
войны, определившие развитие всей отрасли морского подводного оружия: это Абрам Борисович
Гейро — основатель научной школы морских минеров, Валентин Иванович Егоров —
основатель научной школы гидродинамики привязных систем, Радий Васильевич Исаков —
руководитель научной школы по исследованию и разработке систем управления движением
торпед и боевых частей минных комплексов.
Прикладные технологии в области гидроакустики и гидрофизики создаются в основном в
рамках следующих научных направлений научно-производственной школы организации:
− гидроакустические средства самонаведения, наведения и наблюдения для самоходных
и стационарных подводных систем (школа малой гидроакустики);
− имитация физических полей кораблей;
− необитаемые поисковые подводные системы и технические средства;
− воздействие электрофизических полей на материалы и технологические процессы
изготовления;
− гидродинамическая компоновка подводных аппаратов;
− гидродинамика привязных подводных систем;
− движители и ходкость скоростных подводных аппаратов;
− разработка процессов управления движением самоходных подводных аппаратов и
систем.
Для развития данных научно-технологических направлений в разные годы, в дополнение
к основным проектным отделам, были созданы специализированные отделы [4]:
− отдел гидродинамики и гребных винтов (1948 г.);
− отдел специальных гидроакустических приборов (1948 г.);
− отдел управляющих и регистрирующих приборов (1955 г.);
− отраслевое технологическое бюро (1962 г.);
− гидроакустический отдел (1966 г.).
Начавшийся с конца 1950-х годов прошлого века выход советского ВМФ в Мировой океан
потребовал незамедлительного проведения исследований работоспособности образцов МПО в
различных климатических и гидрологических условиях, от тропических широт до Арктики.
С осени 1962 сотрудниками института выполнялись акустические измерения и
эксперименты по закрытой программе на филиале дрейфующей научно-исследовательской
станции СП-10. Батикамеры с оборудованием опускались лебедкой через лунки-проруби,
проделанные с помощью взрывов в паковой льдине толщиной от 4 до 8 метров. На
широкополосный магнитофон осуществлялась запись формируемых аппаратурой под ледовым
покровом эхосигналов, а также реверберации и шумов торошения. Несмотря на сложные
условия, запланированную программу испытаний удалось выполнить полностью. В апреле
1964 г. все сотрудники НИИ-400 вернулись на большую землю. Результаты обработки
экспериментальных данных позволили уточнить особенности функционирования ССН в
арктических условиях и выработать ряд ценных рекомендаций по корректировке параметров
временных регулировок в приемных трактах электронной аппаратуры [5].
Бурное развитие вооружений в 60-е годы, проектирование акустических ССН для новых
типов торпед, ракетно-торпедных и минно-торпедных комплексов с возросшими требованиями
по дальности действия, в том числе и под ледовым покровом, потребовало организации новой
экспедиции. По решению СМ СССР в период со второго квартала 1970 года по второй квартал
1971 г. НИИ-400 совместно с ААНИИ организовал проведение второй арктической экспедиции
на специально созданной дрейфующей станции СП-20. В северо-восточной части
18
Пленарные доклады
Восточно-Сибирского моря была выбрана паковая льдина размером 4×4 км и толщиной от 3 до
12 м. В период зимовки на станции трудились 30 человек. В течение летнего и зимнего сезонов
были исследованы особенности подледного распространения звука и функционирования
аппаратуры в различных режимах и широком диапазоне рабочих частот, глубин погружения и
дифферентов. Все гидроакустические исследования сопровождались получением сотрудниками
ААНИИ данных контроля среды. Полученные результаты подтвердили прогнозы о тяжелых
гидроакустических условиях работы под ледовым покровом Арктики и позволили выработать
ряд рекомендаций по улучшению качества и надежности работы образцов как серийной, так и
опытной техники. Анализ экспериментальных данных помог выявить некоторые малоизученные
закономерности формирования сигналов, отраженных и рассеянных границами раздела сред, в
частности нижней кромкой льда, и явился шагом к более полному и точному пониманию
сложных механизмов образования вторичного акустического поля, воздействующего на
гидролокатор торпеды. Комплексные гидроакустические исследования, выполненные на СП-20,
получили высокую оценку разработчиков акустической аппаратуры и руководства и
способствовали дальнейшему развитию и расширению исследовательских работ в Мировом
океане.
Первая целенаправленная тропическая экспедиция с испытаниями акустической
аппаратуры состоялась в 1965−1966 гг. на борту НИС «Исследователь» ЦНИИТС, с портом
приписки — Севастополь. Маршрут экспедиции пролегал в основном в тропической зоне
Индийского океана вблизи островов Индонезийского архипелага. Всего было выполнено
полтора десятка испытаний с регистрацией морской реверберации. Океанские исследования
были продолжены в 1967−1968 гг. в составе экспедиции АКИН на борту НИС «Сергей Вавилов»
в районах центральной Атлантики. При изучении свойств реверберации, впервые в практике
работ в море, наряду с излучением тонально-импульсных посылок были реализованы режимы
излучения частотно-модулированных зондирующих сигналов.
В дальнейшем, в период с 1973 по 1977 гг. в ЦНИИ «Гидроприбор» были развернуты
широкомасштабные экспериментальные исследования в рамках НИР «Океан». График рейсов
был плотный, а география – обширной. Первые экспедиции в 1973 г. проводились на НИС
«Дмитрий Менделеев», Института океанологии им. П. П. Ширшова РАН, в районы Индийского
океана и ЭОС «Абхазия», гидрографической службы ВМФ, в тропические зоны Атлантического,
Индийского и Тихого океанов. В 1974 и 1975 гг. — экспедиции на НИС «Профессор Зубов» в
северную Атлантику. В 1974 и 1976 гг. — экспедиции в тропические воды Атлантического и
Индийского океанов на НИС «Изумруд», принадлежащем ЦНИИТС. В 1976−1977 гг. экспедиция
на борту НИС «Профессор Визе» была направлена в северную Атлантику. Заключительной стала
экспедиция из Владивостока в Новороссийск на НИС «Витязь» в 1977 г.
В 1980-х годах проходили совместные с АИН РАН экспедиции на НИС «Академик
Николай Андреев». Так в 1987−1988 гг. состоялась экспедиция из Владивостока в Севастополь.
Одной из задач экспедиции было изучение явления взаимодействия сверх низкочастотной
модуляции звукового поля в океанской среде, прямых гидроакустических сигналов СНЧ как в
отсутствии подводной лодки, так и при ее движении в подводном положении, изучались
анизотропия распространения звука в океанах применительно к СНЧ-полям. Также в ходе
экспедиции определялись реальные значения шумов дальнего судоходства.
В итоге многолетних исследований в различных географических и климатических зонах
Мирового океана, был создан мощный пласт экспериментальных данных, характеризующих
свойства вторичного акустического поля морской среды и подводных объектов различной
природы, что позволило выработать рекомендации по повышению помехоустойчивости и
надежности функционирования акустической аппаратуры в наиболее неблагоприятных
условиях. Были созданы модели распространения звука, при различных гидрологических
условиях, надежно подтвержденные экспериментальными данными. В дальнейшем эти модели
были использованы при разработке так называемого «сухого полигона» — комплекса
имитационного и физико-математического моделирования процессов маневрирования и
наведения автономных необитаемых подводных аппаратов.
Большой массив натурных данных о распределении течений и скорости звука по глубине
позволил создать математические модели функционирования стационарных изделий при
различных гидрологических условиях и обосновать расширение зоны применения морских
19
Пленарные доклады
минных комплексов до океанических глубин.
В условиях беспрецедентного сокращения государственного оборонного заказа,
присвоение в 1994 г. статуса Государственного научного центра Российской Федерации
позволило сохранить научно-производственную школу организации, переориентировавшись на
гражданское направление. В рамках федеральных целевых научно-технических программ,
программ прикладных НИОКР, программ фундаментально-поисковых исследований,
федеральных целевых программ, научным коллективом института, а затем концерна, были
выполнены десятки НИОКР гражданского назначения.
В настоящее время, в рамках основной деятельности, ГНЦ АО «Концерн «Морское
подводное оружие – Гидроприбор» создает технологии обеспечения морской безопасности
России военного, двойного и гражданского назначения. Одно из востребованных рынком
направлений — это стационарные и мобильные технические средства охраны объектов морской
инфраструктуры и прилегающих к ним акваторий, для предупреждения диверсионных актов изпод воды.
Разрабатывается морское подводное оружие, в том числе для носителей, действующих в
арктической зоне, автономные и телеуправляемые необитаемые подводные аппараты для работ
на арктическом шельфе, обеспечиваются испытания специальной техники для ВМФ в
арктических условиях.
В части проведения фундаментальных, поисковых и прикладных исследований,
направленных на обеспечение обороны и безопасности государства, ГНЦ «Гидроприбор»
продолжает поддерживать тесные контакты с институтами Российской академии наук.
В 2017−2022 гг. ГНЦ «Гидроприбор» заключил договоры о сотрудничестве с: ИФЗ РАН; СПб
филиалом ФГБУН Института океанологии им П. П. Ширшова РАН, Физико-техническим
институтом им. А. Ф. Иоффе в части разработки перспективных источников тока, с Институтом
технической химии Уральского отделения РАН и НИЦ «Курчатовский институт» — ВИАМ в
области разработок полимерных композиционных материалов для конструкций морского
оружия, с Институтом химии ДВО РАН — в области испытания материалов. Совместно с
Институтом прикладной физики А. В. Гапонова-Грехова проводятся исследования в области
систем звукоподводной связи, совместно с Институтом проблем морских технологий ДВО РАН
— в области разработок радиоэлектронной аппаратуры.
В целях реализации концепции управления жизненным циклом изделий и более тесной
интеграции научной деятельности с производством, в 2019 г. в состав ГНЦ РФ АО «Концерн
«Морское подводное оружие – Гидроприбор» отдельной структурной единицей вошел
АО «Завод «Двигатель». Специалисты ГНЦ осуществляют научно-техническое сопровождение
производства. Задача ГНЦ состоит в организации комплексного взаимодействия с другими
научными организациями по созданию и продвижению перспективных технологий, с целью
обеспечения непрерывной реализации цепочки «фундаментальные исследования — прикладные
исследования — производство наукоёмкой продукции».
480 с.
368 с.
Литература
1. ЦНИИ «Гидроприбор» и его люди за 60 лет. Т.1 - СПб: ИЦ «Гуманитарная академия», 2003.
2. Прошкин С. Г. Морское минное оружие Флота России. Книга I. СПб: Фонд «Отечество», 2009.
3. Шаповалова А. Е. Доклад Валентина Ивановича Егорова к 30-летию института // Научнотехнический сб. «Подводное морское оружие». 2022. Вып.7 (67). С. 69−83.
4. 80 лет на страже подводной безопасности России. СПб: Издательство «Дитон», 2023. 128 с.
5. ЦНИИ «Гидроприбор» и его люди за 60 лет. СПб: Нестор-История, 2008. Т. 3. 392 с.
20
Пленарные доклады
ПРОБЛЕМА НЕВСКИХ НАВОДНЕНИЙ В СВЕТЕ ГЛОБАЛЬНЫХ
ИЗМЕНЕНИЙ КЛИМАТА, НЕБЛАГОПРИЯТНЫХ АНТРОПОГЕННЫХ
ФАКТОРОВ И ГЕОПОЛИТИЧЕСКОЙ СИТУАЦИИ В РЕГИОНЕ
В. А. Румянцев1, акад. РАН, А. А. Родионов1,2, чл.-корр. РАН, А. А. Лобанов2, д-р техн. наук,
В. И. Замышляев2,3, канд. техн. наук, Т. И. Малова2, канд. геогр. наук
1
Санкт-Петербургский научный центр РАН, Санкт-Петербург, Россия
2
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
3
Государственный гидрологический институт, Санкт-Петербург, Россия
THE PROBLEM OF THE NEVA FLOODS IN THE LIGHT OF GLOBAL CLIMATE
CHANGE, ADVERSE ANTHROPOGENIC FACTORS AND THE GEOPOLITICAL
SITUATION IN THE REGION
V. A. Rumyantzev1, Acad. RAS, A. A. Rodionov1,2, Corr. member of RAS, A. A. Lobanov2, Dr.Sc.,
V. I. Zamyshlyaev2,3, Ph.D., T. I. Malova2, Ph.D.
1
St. Petersburg Scientific Center, RAS, St. Petersburg, Russia
2
Shirshov Institute of Oceanology, RAS, Moscow, Russia
3
State Hydrological Institute, St. Petersburg, Russia
В истории наводнений Невы принято выделять катастрофические наводнения 7 (19) ноября 1824 г.
(421 см) и 23 сентября 1924 г. (380 см). Если к этим крупнейшим наводнениям добавить наводнение 5 (16)
ноября 1721 г., а правомерность причисления этого наводнения к списку катастрофических была доказана
в ряде недавних публикаций, то вырисовывается любопытный ряд катастрофических наводнений,
происходящих с периодом примерно в 100 лет. Причиной нагонных наводнений является сложное
взаимодействие метеорологических и гидрологических процессов, происходящих при прохождении
циклонов с преобладанием западных ветров на акватории Балтийского моря и Финского залива. Комплекс
Защитных сооружений являет собой пример успешно реализованного инновационного проекта России
XXI в., в котором были применены самые современные технологии для борьбы с наводнениями, в том
числе, не имеющие аналогов в мире. Антропогенный фактор, определяющий повышение рисков
возникновения наводнений в Санкт-Петербурге, связан, прежде всего, с созданием в акватории Невской
губы намывных территорий. В случае дальнейшего уменьшения площади зеркала Невской губы,
аккумулирующая способность акватории может дойти до критических значений. В этих условиях для
эффективного контролирования ситуации с наводнениями в Санкт-Петербурге и предотвращения их
негативных последствий еще более возрастает роль науки. Актуальность создания отечественных
физико-математических моделей и отечественных систем сбора информации и мониторинга ситуация
на Балтике стала еще более очевидной в нынешних геополитических условиях, особенно ввиду
деструктивных военно-политических действий прибалтийских государств, вступления Финляндии и
Швеции в НАТО и неприкрыто агрессивного характера деятельности этого атлантического блока, когда
становится вполне возможной опасность диверсий, терактов и боевых столкновений военно-морских сил.
In the history of Neva floods, it is customary to highlight the catastrophic floods of November 7 (19), 1824 (421 cm)
and September 23, 1924 (380 cm). If we add to these major floods the flood of November 5 (16), 1721, and the
validity of including this flood in the list of catastrophic floods has been proven in a number of recent publications,
then an interesting series of catastrophic floods emerges, occurring with a period of approximately 100 years.
The cause of surge floods is the complex interaction of meteorological and hydrological processes that occur
during the passage of cyclones with a predominance of westerly winds in the Baltic Sea and the Gulf of Finland.
The Protective Structures Complex is an example of a successfully implemented innovative project in Russia in the
21st century, in which the most modern technologies were used to combat floods, including those that have no
analogues in the world. The anthropogenic factor that determines the increase in the risk of floods in St. Petersburg
is associated, first of all, with the creation of inwash territories in the water area of the Neva Bay. In the event of
a further decrease in the surface area of the Neva Bay, the accumulating capacity of the water area may reach
critical values. In these conditions, to effectively control the flood situation in St. Petersburg and prevent their
negative consequences, the role of science increases even more. The relevance of creating domestic physical and
mathematical models and domestic systems for collecting information and monitoring the situation in the Baltic
has become even more obvious in the current geopolitical conditions, especially in view of the destructive militarypolitical actions of the Baltic states, the entry of Finland and Sweden into NATO and the overtly aggressive nature
of the activities of this Atlantic bloc , when the danger of sabotage, terrorist attacks and military clashes between
naval forces becomes quite possible.
21
Пленарные доклады
С момента основания Санкт-Петербурга наводнения являлись, пожалуй, главной
опасностью для города и продолжают оставаться таковой по сей день. Крупные наводнения
угрожают жизни людей, нарушают эпидемиологическую безопасность, являются причиной
повышенного травматизма, вызывают психические заболевания. Для современного
Санкт-Петербурга дополнительными факторами риска является затопление исторических
районов города с многочисленными архитектурными, культурными и историческими
памятниками, музейными ценностями, а также важнейшими российскими предприятиями,
выполняющими, в том числе, оборонные заказы.
Первые упоминания в летописях о наводнениях в Ижорском крае относятся к 1061–1064 гг.
Отмечалось, что при наводнении в 1300 г. воды р. Волхов шли вспять в озеро Ильмень.
Значительные наводнения фиксировались в 1540–1594 гг. В 1691 г. отмечено сильное наводнение,
когда была затоплена р. Охта, что не наблюдалось даже при катастрофическом наводнении 1824 г.
По понятным причинам не существует унифицированного и подробного каталога наводнений
Невы, опирающегося на репрезентативные вековые ряды, скажем, за последнее тысячелетие, и
удовлетворяющего методологическим обсерваторским требованиям объективности, точности и
полноты описания сведений. Такой информации, несмотря на длительную историю изучения
наводнений Невы, нет даже за последние 300–400 лет. Тем не менее, все же удалось установить
некоторые важные и интересные закономерности, особенно касающиеся катастрофических
наводнений последних столетий. 1
В истории наводнений Невы принято выделять катастрофическое наводнение 7 (19) ноября
1824 г., когда подъем уровня воды составил 421 см, и наводнение, происшедшее 23 сентября
1924 г., с высотой подъема воды 380 см. Если к этим крупнейшим наводнениям добавить
наводнение 5 (16) ноября 1721 г., а правомерность причисления этого наводнения к списку
катастрофических была доказана в ряде недавних публикаций [1–3], то вырисовывается
любопытный ряд катастрофических наводнений, происходящих с периодом примерно в 100 лет:
1721, 1824 и 1924 гг. Таким образом, можно говорить, о нынешнем 2024 годе как о «юбилее» всех
катастрофических наводнений Невы.
Причиной нагонных наводнений является сложное взаимодействие метеорологических и
гидрологических процессов, происходящих при прохождении циклонов с преобладанием
западных ветров на акватории Балтийского моря и Финского залива. При определенных условиях
образуется, так называемая, «длинная волна», которая начинает движение в направлении устья
реки Невы, где подъем воды усиливается из-за сужения и мелководья Невской губы. Анализ
данных свидетельствует о том, что в восточной части Финского залива наводнения происходят
практически во все месяцы года, но максимальное их количество приходится на осенне-зимний
период.
Вопрос о защите города от наводнений стал актуальным с самых первых дней
существования Санкт-Петербурга. После катастрофы 1824 г. инженер П. Д. Базен предложил
вариант защиты Санкт-Петербурга от нагонных наводнений с помощью строительства каменноземляной дамбы в Финском заливе, но в то время этот проект сочли неосуществимым. Однако
актуальность проблемы с годами только росла, и в 1965–1977 гг. были разработаны ТЭО защиты
Ленинграда от наводнений и Технический проект комплекса защитных сооружений. Проект
прошел государственную экспертизу и был утвержден Постановлением Совета Министров СССР
29.12.1978 г., а само строительство дамбы в Финском заливе было начато в 1979 г.
В эксплуатацию Комплекс сооружений по защите Санкт-Петербурга от наводнений (КЗС) был
введен только в 2011 г.
Комплекс Защитных сооружений являет собой пример успешно реализованного
инновационного проекта России XXI в., в котором были применены самые современные
технологии для борьбы с наводнениями, в том числе, не имеющие аналогов в мире. С момента
ввода КЗС в эксплуатацию в 2011 г. дамба предотвратила 27 наводнений, одно из которых могло
случиться буквально через 4 месяца после начала работы КЗС и войти в четверку самых
значительных за всю историю Петербурга, с уровнем подъема воды почти до трех метров выше
1
По нынешней градации наводнений катастрофическими считаются наводнения с высотой подъема воды 300 см и выше, при
которых площадь затопления составляет более 100 кв. км; опасными — наводнения с высотой подъема воды 161–211 см и площадью
затопления от 10 до 45 кв. км; особо опасными — наводнения с высотой подъема воды 211–299 см и площадью затопления от 45 до
100 кв. км.
22
Пленарные доклады
ординара. Таким образом, казалось, что построенный комплекс навсегда решил задачу защиты
города от нагонных наводнений, и что с этой угрозой покончено навсегда. Однако в последние
годы выявились четкие тенденции к росту вероятности возникновения наводнений в
Санкт-Петербурге — повторяемость наводненческих ситуаций в Санкт-Петербурге повысилась
более чем в два раза. В частности, в течение трех лет наблюдалось 11 наводнений с близкими к
критическому уровнями воды, а в декабре 2015 г. имели место три ежедневных нагонных
наводнения подряд, что, согласно историческим данным, наблюдалось только в XVIII в.
Приходится констатировать, что Комплекс защитных сооружений в Невской губе уже не может
гарантировать защиту города от наводнений с заданной в проекте вероятностью, и что
происходит увеличение риска подтопления города, в том числе его исторической части.
Известно, что в числе факторов, связанных с повышением рисков возникновения
наводнений, можно выделить естественные, обусловленные, главным образом, климатическими
изменениями, и антропогенные, связанные с интенсивным хозяйственным использованием
прибрежных территорий.
По утверждениям Всемирной метеорологической организации (ВМО) для
урбанизированных территорий 90 % природных бедствий, в т.ч. городские наводнения, имеют
гидрометеорологическое происхождение, и эти проблемы усугубляются с изменением климата.
И действительно, резкое увеличение количества наводнений в восточной части Финского залива
объясняется в первую очередь влиянием процессов глобального потепления и, как следствие,
усилением с 1981 г. циклонической активности над Северной Атлантикой. Повышается и уровень
Балтийского моря при общей тенденции повышения уровня Мирового океана. При этом
возрастает
угроза
не
просто
наводнений,
но
наводнений
катастрофических.
Межправительственная группа экспертов по изменению климата (МГЭИК) прогнозирует, что в
XXI в. средняя глобальная температура будет повышаться при всех сценариях радиационного
воздействия, а уровень Мирового океана в период с 2081 по 2100 г. по сравнению с концом XX в.,
вероятно, повысится в диапазонах от 0,26–0,55 м до 0,45–0,82 м.
Таким образом, изменяющийся климат и в целом на планете, и в регионе нахождения
Санкт-Петербурга, очевидно является фактором, создающим условия, повышающие риск
нагонных наводнений на Неве.
Антропогенный фактор, определяющий повышение рисков возникновения наводнений в
Санкт-Петербурге, связан, прежде всего, с созданием в акватории Невской губы намывных
территорий, которые создаются в соответствии с региональным законом «О Генеральном плане
Санкт-Петербурга» от 22.12.2005.
Невская губа — это мелководный водоем с плоским дном, длиной 21 км, наибольшей
шириной 15 км, с преобладающей глубиной 3–5 м, имеющий собственный гидрологический
режим. Поскольку при закрытых затворах КЗС Невская губа является водоемом,
аккумулирующим сток р. Невы, при проектировании и строительстве КЗС все конструктивные
элементы комплекса, а также технические условия его эксплуатации рассчитывались в строгом
соответствии с актуальными на тот период данными по гидрологическому режиму,
гидродинамическим и морфометрическим параметрам, включающим, в том числе, объем и
площадь акватории (зеркала) Невской губы. Однако ввиду создания намывных территорий в
Невской губе работа КЗС по предотвращению наводненческих ситуаций происходит при
постоянно уменьшающейся площади зеркала Невской губы и ее объема. Действительно, если в
соответствии с техническим проектом 1977 г. площадь акватории Невской губы, отсекаемая
защитными сооружениями, составляла 400 км² с объемом воды 1,7 км³, то в январе 2019 г. в акте
передачи объекта в пользование Дирекции КЗС были зафиксированы уже другие цифры: 329 км²
и 1,0 км³, соответственно. Таким образом, за 40-летний период площадь Невской губы
уменьшилась на 17,7 % (есть информация, что в действительности сокращение зеркала Невской
губы было более существенным — до 30 %), а объем водной массы — на 41,2 %, т.е. настолько
уменьшился аккумулирующий объем Невской губы [4]. Между тем, при уменьшении площади
акватории Невской губы увеличивается скорость ее заполнения водой, а при закрытии затворов
дамбы — более стремительно растет уровень воды в городе. И если нагонная волна Балтики будет
идти больше 48 часов, есть риск получить полноценное наводнение, т.е. подтопление, вызванное
водами Невы.
23
Пленарные доклады
В настоящее время работы по созданию искусственных земельных участков не
прекращаются. До 2025 г. в Невской губе планируется создать до 1500 га намывных территории
(уже намыто 238 га) и развернуть там, т.е. в зоне риска возникновения нагонных наводнений,
интенсивное гражданское жилищное строительство. Такие планы вызывают серьезные опасения
специалистов, утверждающих, что КЗС уже сейчас работает на пределе своих проектных
возможностей. В случае дальнейшего уменьшения площади зеркала Невской губы,
аккумулирующая способность акватории может дойти до критических значений [5].
В этих условиях для эффективного контролирования ситуации с наводнениями в
Санкт-Петербурге и предотвращения их негативных последствий еще более возрастает роль
науки. И международные, и отечественные регламентирующие документы, в т.ч. рекомендации
ВМО, устанавливают, что стратегия адаптации к изменениям климата должна основываться на
возможности оперативного и непрерывного получения данных, – применительно к
рассматриваемому вопросу, прежде всего, гидрометеорологических данных – позволяющих
оценивать риски возникновения угроз различного рода для населения, экономики и безопасности
страны, что предполагает наличие эффективной системы сбора информации и мониторинга
происходящих процессов, и инструмента в виде физико-математической модели, позволяющего
максимально быстро обрабатывать получаемую информацию для принятия стратегических и/или
оперативных решений. Такие же задачи требуется решать, когда наряду с климатическими
существуют и другие создающие риски неблагоприятных последствий факторы, в частности,
антропогенные факторы. Отсюда вытекает актуальность, как минимум, следующих задач:
− создание отечественной системы сбора гидрометеорологической информации, с
использованием космических, воздушных, надводных, подводных и сухопутных средств сбора
информации;
− создание отечественного комплекса физико-математических и численных моделей для
описания режима водной системы «Ладога – р. Нева – Невская губа – Финский залив –
Балтийское море» на основе усвоения (ассимиляции) гидрометеорологической информации.
Решение таких же задач предусмотрено и пунктами 11 и 14 Плана мероприятий по
организационному, нормативно-правовому, научно-методическому и информационному
обеспечению реализации национального плана мероприятий второго этапа адаптации к
изменениям климата на период до 2025 г. [6].
Оценивая ситуацию в целом и планируя направления деятельности, необходимо учесть
факторы, придающие дополнительную актуальность обозначенным выше задачам. Приходится
констатировать, что в течение последних тридцати лет в России не уделялось достаточного
внимания разработке отечественных систем и продуктов, которые позволяли бы нам создавать и
сохранять, в частности, информационную и цифровую независимость страны. В последние два
года наше сотрудничество с зарубежными учеными и научными организациями по многим
направлениям либо существенно сократилось, либо прекратилось полностью. В частности, ранее
наши специалисты по гидрологии, океанологии и гидрофизике в рамках международного
сотрудничества могли пользоваться программными продуктами, либо находящимися в открытом
доступе, как, например, разработки лаборатории DELFT, либо приобретаемые на коммерческой
основе, как, например, численные модели семейства MIKE. Но с середины 2022 г. такие
возможности перестали существовать: западные разработчики ввели запрет на получение или
закупку этих продуктов и даже на получение технической поддержки для пользователей из
России и Белоруссии, купивших эти продукты ранее. То же произошло и с возможностью
получения от коллег из Финляндии, Швеции, Дании и других западных стран
гидрометеорологической информации, используемой в подобных моделях.
Актуальность создания отечественных физико-математических моделей и отечественных
систем сбора информации и мониторинга ситуации на Балтике стала еще более очевидной в
нынешних геополитических условиях, особенно ввиду деструктивных военно-политических
действий прибалтийских государств, вступления Финляндии и Швеции в НАТО и неприкрыто
агрессивного характера деятельности этого атлантического блока, когда становится вполне
возможной опасность диверсий, терактов и боевых столкновений военно-морских сил.
В нынешних условиях нельзя исключать и применения нашими противниками тектонического
оружия с целью создания искусственных длинных волн большой амплитуды (цунами),
способных вызвать катастрофические наводнения в Санкт-Петербурге. Стоит еще раз напомнить,
24
Пленарные доклады
что на территории Санкт-Петербурга расположено большое количество крупнейших российских
предприятий, выполняющих, в том числе, и оборонные заказы.
Для обеспечения действий нашего Военно-Морского Флота, предупреждения и
ликвидации экологических катастроф нужно иметь информацию о гидрофизических
характеристиках оперативно-важных акваторий. Совершенно очевидно, что система сбора и
мониторинга гидрометеорологической информации, так же, как и числовой комплекс ее
обработки, должны быть полностью отечественными и абсолютно независимыми от
иностранных источников данных и от иностранных программных продуктов. При этом, однако,
не следует пренебрегать доступными разработками, даже если изначально они разрабатывались
за рубежом.
С учетом вышеизложенного следующие задачи представляются нам весьма важными и
срочными:
− остановить исполнение программы создания намывных территорий в акватории
Невской губы;
− модернизировать
и
усовершенствовать
систему
сбора
и
мониторинга
гидрометеорологической информации, отвечающую всем современным требованиям по объему,
полноте и точности получаемых данных, и основанную на применении средств измерений
космического, воздушного, морского и берегового базирования;
− создать отечественный комплекс численных моделей, позволяющий описывать и
прогнозировать режим водной системы «Ладога – р. Нева – Невская губа – Финский залив –
Балтийское море»;
− обеспечить проведение научных исследований, нацеленных на совершенствование
физико-математических моделей, лежащих в основе создаваемых численных моделей указанной
водной системы;
− для создания комплекса численных моделей обеспечить широкую межведомственную
кооперацию российских ученых, с привлечением ведущих разработчиков и пользователей
подобных численных моделей, главным образом, из Санкт-Петербурга, но также из других
российских регионов;
− обеспечить научное руководство программой и координацию работы ученых из
различных ведомств Санкт-Петербургским отделением РАН;
− обеспечить финансирование указанных работ.
Литература
1. Богданов В.И., Малова Т.И. К реставрации высот исторических наводнений Невы, 1721–1777 гг.
// Доклады Академии наук. Т. 443, № 1. 2012. С. 108–111.
2. Малова Т.И. О высоте катастрофического наводнения Невы 10 (21) сентября 1777 г. // Доклады
Академии наук. Т. 422, № 5. 2008. С. 677–679.
3. Малова Т.И. Реставрация данных об исторических наводнениях Невы: принципы построения
репрезентативного каталога. Автореферат диссертации на соискание ученой степени кандидата
географических наук. СПб. 2021. 28 с.
4. Влияние глобального потепления на наводнения и работу КЗС в Санкт-Петербурге
(Электронный ресурс): https://dambaspb.ru/?ysclid=ls2vstxdyb439082725#intro (дата обращения –
01.02.2024 г.).
5. Клеванный К. А., Еремеева А. О. Прогноз воздействия опасных гидрометеорологических
процессов на акваторию Невской губы и территорию в районе «МФК Лахта-Центр» // Тр. II Всерос. конф.
«Гидрометеорология и экология: научные достижения и перспективы развития». СПб. 2018. С. 347−350.
6. Национальный план мероприятий второго этапа адаптации к изменениям климата на период до
2025 г. (Электронный ресурс): https://DzVPGlI7JgT7QYRoogphpW69KKQREGTB.pdf (government.ru) (дата
обращения – 01.02.2024 г.).
Работа выполнена в рамках государственного задания FMWE-2024-0028; 075-00611-24-00 (FMRU2023-002).
25
Пленарные доклады
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ СОГЛАСОВАННОЙ СО СРЕДОЙ
ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ
В. А. Сергеев, канд. техн. наук, А. А. Родионов, член-корр. РАН, И. А. Малеханов1, канд. физ.-мат. наук,
Д. А. Никитин, канд. техн. наук, Р. Е. Ванкевич, канд. техн. наук, С. П. Дёмин, канд. воен. наук,
В. В. Кулинич1, канд. физ.-мат. наук
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
1
Институт прикладной физики РАН, Нижний Новгород, Россия
COMPUTER SIMULATION OF ENVIRONMENTALLY CONSISTENT PROCESSING
OF HYDROACOUSTIC SIGNALS
V. A. Sergeev, Ph.D., A. A. Rodionov, Corr. member of RAS, I. A. Malekhanov1, Ph.D., D. A. Nikitin, Ph.D.,
R. E. Vankevich, Ph.D., S. P. Dyomin, Ph.D., V. V. Kulinich1, Ph.D.
Shirshov Institute of Oceanology, RAS, Moscow, Russia
1
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Создан комплекс программ, позволяющий на основе лучевых и волновых методов расчёта
гидроакустических полей осуществлять реалистичное моделирование гидроакустических сигналов
удаленных источников при их распространении в океаническом волноводе на фоне шумов морской среды
и различных методов их обработки на основе согласования со средой, оценивать их качество в различных
режимах работы при заданных уровнях погрешности априорной информации о распределении гидрологоакустических характеристик в районе проведения исследований.
A set of programs has been created that allows, based on ray and wave methods for calculating hydroacoustic
fields, to simulate hydroacoustic signals from sources as they propagate in a real waveguide against the
background of noise in the marine environment, to process signals using methods consistent with the environment,
and to evaluate their quality in various operating modes at a given accuracy obtaining information on the
distribution of hydrological and acoustic characteristics in the research area.
Более 50 лет прошло с появления первых публикаций, посвященных согласованной с
полем (или со средой) обработке (ССО) гидроакустических (ГА) сигналов (в англоязычной
литературе — matched field processing (MFP)) [1, 2], но интерес к этой проблеме не ослабевает.
Это связано, прежде всего, с теми потенциальными преимуществами, которыми обладает ССО
по сравнению с традиционными методами обработки ГА сигналов, заключающимися в
повышении помехоустойчивости (дальности действия) и в возможности локализации удаленных
источников по глубине и дистанции. Однако, как показали многочисленные исследования,
методы ССО обладают высокой чувствительностью к ошибкам параметров модели
гидроакустического канала, которая используется для их реализации. В результате этого
указанные выше преимущества ССО оказываются не достижимыми в условиях реального океана
[3]. Стало ясно, что для того, чтобы идея ССО приобрела практический смысл, необходимо
двигаться в двух встречных направлениях. С одной стороны, необходимо разрабатывать
робастные алгоритмы ССО, обладающие высокой устойчивостью к ошибкам параметров
морской среды, и определять требования по объему и качеству оперативной информации о
реальной морской среде, необходимой для их эффективного функционирования [4]. С другой
стороны, необходимо создать систему оперативной океанографии (СОО), обеспечивающую
эффективное функционирование ССО на основе данных о текущем состоянии морской среды
[5]. При этом ключевым вопросом, определяющим возможность практической реализации ССО,
является количественная оценка влияния ошибок параметров морской среды на эффективность
гидроакустических средств (ГАС), использующих методы ССО [6].
Следует подчеркнуть, что аналитические и экспериментальные методы не позволяют дать
достаточно полный ответ на поставленный вопрос: аналитические методы ограничены только
простейшими гидролого-акустическими условиями (ГАУ), в то время как при проведении
экспериментальных исследований не удается достаточно точно и оперативно контролировать
параметры волновода. Поэтому единственным подходом, в рамках которого можно
количественно оценить эффективность алгоритмов ССО в реальных ГАУ с учетом неточного
знания параметров морской среды, является компьютерное имитационное моделирование на
основе реалистичной численной модели среды распространения принимаемых сигналов. С этой
26
Пленарные доклады
целью была создана комплексная компьютерная модель, позволяющая на основе лучевых и
волновых методов расчёта гидроакустических полей осуществлять имитационное
моделирование процессов функционирования ГАС, использующих алгоритмы ССО как при
условии точного согласования со средой, так и при заданных уровнях погрешностей данных о
текущих параметрах морской среды, поступающих от СОО.
Структурная схема модели представлена на рис. 1. Основными ее элементами являются:
модель СОО; модель входных воздействий; модель обработки сигналов. Модель СОО
формируется на основе данных реанализа морской среды. Данные реанализа представляют собой
модельные данные на регулярной сетке с ассимилированными натурными данными судовых
наблюдений, дрейфующих буев и глайдеров, а также спутниковых наблюдений. В работе
применяются результаты реанализа, предоставляемого глобальной системой прогнозирования
океана Hybrid Coordinate Ocean Model (HYCOM) с разрешением по горизонтали 1/12°. Для
ассимиляции данных используется система Navy Coupled Ocean Data Assimilation (NCODA) [7].
NCODA использует 24-часовой модельный прогноз в качестве первого предположения в
вариационной схеме 3D и сопоставляет доступные спутниковые наблюдения высотомера,
температуру поверхности моря со спутника, а также профили вертикальной температуры и
солености на месте, полученные от одноразовых батитермографов (XBTS), поплавков Argo и
заякоренных буев. Информация о поверхности проецируется вниз, в толщу воды, с
использованием улучшенных синтетических профилей океана. Численная модель динамики
океана HYCOM разработана для исследования океанских термогидродинамических процессов в
широком диапазоне пространственных и временных масштабов, она хорошо известна и не
является предметом нашего исследования, но используется как инструмент для задания
различных характерных стратификаций гидрофизических полей и анализа их пространственновременной изменчивости [8].
Рис. 1. Структурная схема комплексной модели исследования алгоритмов ССО
ПВО — пространственно-временная обработка; ПЧО — пространственно-частотная обработка
27
Пленарные доклады
Модель входных воздействий включает в себя модели сигналов активных и пассивных
ГАС, модели окружающего шумового фона и реверберационных помех, а также модели ГА
канала. ГА канал описывается передаточной функцией (ПФ), которая вычисляется для каждой
пары «источник-приемник». Для расчета ПФ неоднородного по трассе канала используются как
лучевой, так и волновой методы расчета параметров звукового поля, что обеспечивает
моделирование алгоритмов ССО в широком диапазоне частот от десятков Гц и выше [9].
Необходимым условием моделирования пространственной обработки сигналов является
высокая точность расчета амплитудно-фазового распределения сигнала по элементам антенны.
Для выполнения указанного условия при расчете ПФ обеспечивается контроль точности
параметров звуковых лучей (нормальных волн), приходящих в приёмные элементы антенны.
Моделирование ГА сигналов осуществляется в два этапа. На первом этапе в частотной
области моделируются реализации сигналов, приведенные к 1 метру от источника. На втором
этапе полученные реализации пересчитываются с помощью передаточной функции среды к
выходам приемных элементов антенны. При этом учитываются текущие координаты и
параметры движения подводного объекта. При моделировании сигналов активных ГАС
учитывается тип зондирующего сигнала и в том числе эхо-портрета подводного объекта,
в бистатическом режиме
При моделировании ГА помехи учитывается ее пространственная корреляция. Для этого в
каждом элементе антенны генерируются некоррелированные реализации гауссова процесса с
заданной спектральной плотностью. Затем спектральные отсчеты полученных реализаций
подвергаются следующему преобразованию Yk = Fk Xk, k = 1, 2, ..., K, где K — число частотных
отсчетов, Xk — вектор, состоящий из отсчетов частотных выборок помехи, взятых со всех
элементов антенны на частоте fk; Yk — результирующий вектор, состоящий из отсчетов помехи
с заданными корреляционными свойствами; Fk — формирующая матрица, определяемая из
следующего соотношения Rk = 𝐅𝐅𝑘𝑘 𝐅𝐅𝑘𝑘+, где Rk — матрица взаимной спектральной плотности
помехи на частоте fk.
При проведении компьютерных экспериментов моделирование входных процессов и их
обработка разделены во времени. Это позволяет существенно снизить требования к
вычислительным ресурсам. Реализации входных воздействий, насчитанные за все время
действия сценария при точно известных параметрах морской среды, сохраняются в архиве в виде
бинарных файлов. Одновременно для каждого сценария записываются ансамбли данных о среде,
выдаваемых СОО, содержащие случайные ошибки. Эти данные в дальнейшем используются при
обработке сигналов методами ССО. Число элементов ансамбля определяется числом
статистических испытаний, необходимых для получения заданных показателей эффективности
ССО. Сохранение в архиве ансамбля данных о состоянии морской среды необходимо для
создания одинаковых условий при выполнении сравнительного анализа эффективности
различных алгоритмов ССО.
В состав модели обработки сигналов входят:
− модели пространственно-временной (пространственно-частотной) обработки сигналов,
включающие как различные алгоритмы ССО, так и традиционные алгоритмы обработки,
которые не используют данные о параметрах водной среды;
− модель трассовой обработки;
− блок статистического анализа результатов моделирования.
В комплексной модели реализованы алгоритмы ССО, основанные на таких широко
известных методах как: метод фокусировки антенны в пространстве волновода; метод
обращения волнового фронта и метод временного обращения волн. В то же время программная
реализация модели, разработанная на основе объектно-ориентированного подхода, позволяет
легко интегрировать в программный комплекс любые другие методы обработки сигналов.
В современных ГАС принятие решения об обнаружении цели, как правило,
осуществляется на этапе трассовой обработки, позволяющей производить обнаружение
сигнальных отметок при более низком пороге и, тем самым, повысить дальность обнаружения
целей. Для алгоритмов ССО это положение особенно актуально в связи со значительным
увеличением числа элементов разрешения. Особенность алгоритма трассового обнаружителя,
реализованного в представленной модели, заключается в расширении вектора обрабатываемых
28
Пленарные доклады
параметров, путем включения в его состав помимо угловых координат глубины и дальности до
цели.
Рис. 2. Вероятностные характеристики обнаружения цели с использованием традиционного алгоритма
и алгоритма ССО при различных значениях СКО ошибок скорости звука
Блок статистической обработки результатов компьютерных экспериментов предназначен
для получения численных значений заданных показателей эффективности, к основным из
которых относятся дальность обнаружения цели с заданными вероятностными
характеристиками и средние квадратичные отклонения получаемых оценок координат
подводных объектов.
С помощью разработанной модели решены следующие задачи:
− получены реалистичные оценки влияния априорной неопределенности морской среды
на выходные характеристики алгоритмов ССО для различных типов приёмных антенн
(горизонтальной, вертикальной, планарной, цилиндрической);
− выполнен сравнительный анализ эффективности различных алгоритмов ССО с учетом
ошибок информации о параметрах среды, выдаваемой СОО;
− определены требования к СОО по составу, пространственно-временной дискретности и
точности выдаваемых параметров, необходимых для функционирования ССО применительно к
конкретным районам Мирового океана.
Рис. 2 иллюстрирует применение разработанной комплексной модели для оценки влияния
ошибок вертикального распределения скорости звука на эффективность алгоритма ССО в
типичных ГАУ Черного моря. На данном рисунке приведены вероятностные характеристики
обнаружения цели для пассивной ГАС, имеющей в своем составе эквидистантную
32-элементную вертикальную антенну, расположенную на оси подводного звукового канала.
Расстояние между элементами равно 1,2 м, диапазон частот составляет 200…900 Гц. На оси
абсцисс расположены значения относительной дальности Д/Дш, где Дш — дальность шкалы.
Синяя кривая соответствует точному знанию параметров ГА канала, голубая — традиционному
алгоритму, заключающемуся в формировании веера характеристик направленности.
Промежуточные кривые соответствуют различным значениям среднеквадратических
отклонений (СКО) относительных ошибок скорости звука.
Из рис. 2 видно, что если СКО ошибок скорости звука не превышает 0,07 %, то алгоритм
ССО дает выигрыш в дальности обнаружения цели по сравнению с традиционным около двух
раз. При увеличении СКО ошибок скорости звука до 0,1 % эффективность алгоритма ССО резко
снижается и практически падает до уровня традиционного алгоритма. Аналогичные зависимости
могут быть получены для каналов с другими ГАУ, отвечающими различным морским районам.
Выводы
1. Направление, связанное с развитием методов ССО, не потеряло своей актуальности.
Более того, оно является мощным стимулом, способствующим совершенствованию гидрологоакустических моделей морской среды и методов расчета звуковых полей в реальном океане.
2. Единственным методом, позволяющим всесторонне исследовать влияние частичного
или ошибочного знания параметров среды на эффективность алгоритмов ССО и решать
29
Пленарные доклады
связанные с этим задачи, включая сравнительную оценку различных алгоритмов ССО и
обоснование требований к СОО, является метод имитационного моделирования при условии
корректного описания ГА канала распространения сигналов.
3. Разработанная комплексная компьютерная модель может быть использована в качестве
универсального инструмента для исследований эффективности алгоритмов ССО в реальных
условиях функционирования ГАС.
4. Дальнейшее совершенствование разработанной модели должно быть направлено на
реализацию робастных алгоритмов, обладающих повышенной устойчивостью к ошибкам
параметров ГА канала и, тем самым, снижающих требования к СОО.
Литература
1. Clay C. S. Use of arrays for acoustic transmission in a noisy oceans // Rev. Geophys. 1966. Vol. 4, № 4.
Р. 475−507.
2. Bucker H. P. Use of calculated sound fields and matched field detection to locate sound sources in
shallow water // J. Acoust. Soc. Am. 1976. Vol. 59, № 2. P. 368–373.
3. Baggeroer A. B. Why did applications of MFP fail, or did we not understand how to apply MFP? //
Proc. 1st Int. Conf. and Exhib. on Underwater Acoustics / Ed. J. S. Papadakis, L. Bjorno. Corfu Island, Greece.
2013. P. 41–49.
4. Малеханов А. И., Коваленко В. В., Никитин Д. А., Сазонтов А. Г., Сергеев В. А. Согласованная со
средой обработка акустических сигналов в подводных звуковых каналах: состояние исследований, оценки
эффективности, перспективы // Тр. XVI Всерос. конф. «Прикладные технологии гидроакустики и
гидрофизики». СПб.: Политех–Пресс, 2022. С. 15–21.
5. Коваленко В. В., Родионов А. А., Ванкевич Р. Е. Методические основы построения систем
оперативной океанографии в приложении к задачам подводного наблюдения // Фундаментальная и
прикладная гидрофизика. 2021. Т. 14, № 3. С. 4–19.
6. Малеханов А. И. Точность априорной информации об океанической среде как фактор
эффективности пространственной обработки гидроакустических сигналов // Гидроакустика. 2023.
Вып. 53(1). С. 7–22.
7. Cummings J. A. Operational multivariate ocean data assimilation // J. R. Meteorol. 2005. Soc. 131.
Р. 3583−3604.
8. Helber R. W., Carnes M. R., Townsend T. L., Barron C. N., Dastugue J. M. Validation Test Report for
the Improved Synthetic Ocean Profile (ISOP) System // Part I: Synthetic Profile Methods and Algorithm.
Oceanography Division, Naval Research Laboratory, Stennis Space Center, MS. 2013. NRL/MR/7320--13-9364
9. Jensen F. B., Kuperman W. A., Porter M. B., Schmidt H. Computational Ocean Acoustics // AIP Series
in Modern Acoustics and Signal Processing. New York: American Institute of Physics, 1994.
30
Пленарные доклады
МЕТОДЫ И РЕЗУЛЬТАТЫ АКУСТИЧЕСКОЙ КАЛИБРОВКИ ВОЛНОВОДА
Г. Н. Кузнецов, канд. физ.-мат. наук
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
METHODS AND RESULTS OF WAVEGUIDE ACOUSTIC CALIBRATION
G. N. Kuznetsov, Ph.D.
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
Выполнено обобщение и классификация методов оценки параметров акустической модели морского дна,
используемых для построения передаточной функции волновода. Впервые сравниваются технические
средства и алгоритмы, необходимые для исследования грунта в трех зонах: в районе установки приемных
антенн, вдоль трассы распространения сигналов и в зоне расположения или движения источников шума.
Приводятся экспериментальные результаты применения передаточной функции волновода и показана
возможность оценки приведенной шумности с учетом калибровки.
A generalization and classification of methods for estimating the parameters of an acoustic model of the seabed
used to construct the waveguide transfer function has been carried out. For the first time, the technical means and
algorithms required to study soil in three zones are compared: in the area where receiving antennas are installed,
along the signal propagation path, and in the area where noise sources are located or moving. Experimental
results of constructing and applying the waveguide transfer function are presented. The possibility of coordinated
filtering of signals to estimate the reduced noise and depth of sources is shown, taking into account the results of
acoustic calibration.
Введение. Для решения различных задач гидроакустики необходимы передаточные
функции волновода (ПФВ), для построения которых требуется информация об акустических
параметрах модели морского грунта. Поэтому последние десятилетия исследуются методы
реконструкции акустической модели дна и построения функциональных зависимостей,
определяющих характеристики звукового поля в волноводе. Оценка параметров модели грунта
производится на основе решения нелинейной обратной задачи, в рамках которой выполняется
минимизация функционалов невязки, сформированных с использованием модели и
экспериментально измеренных в различных точках и на различных частотах звуковых давлений
(ЗД). Проверка адекватности выполняется в контролируемых условиях в рамках прямой задачи
путем сравнения с экспериментальными данными.
Несмотря на то, что теория и практика решения упомянутых выше обратных задач еще
находятся «в развитии», можно отметить, что общие принципы и подходы реконструкции
модели грунта сформулированы. При решении обратной задачи необходимо также выполнять
«принцип простой модели», чтобы число оцениваемых параметров было меньше числа
независимых функциональных зависимостей. Отсюда следует, что модели поля, используемые
для расчетов, должны иметь дискретное описание и ограниченное число параметров (на низких
частотах, как правило, применяется маломодовая модель волновода).
Далее — для простоты и краткости — задача идентификации (реконструкции) модели
грунта и оценки многопараметрической передаточной функции волновода (ПФВ) будет
называться акустической калибровкой (АК) волновода. При этом будем различать АК района
установки приемных антенн, АК района установки или буксировки излучателей и АК трасс
распространения сигналов.
Оценка акустических характеристик грунта в районе установки приемных антенн
необходима для когерентного суммирования антенной сигналов, принимаемых
пространственно-разнесенными гидрофонами (ГФ), и формирования несмещенной оценки
отклика. Для этого выполняется АК грунта и идентификация его модели в зоне установки
приемных антенн. Это позволяет построить модель ПФВ в зоне антенны.
Оценка акустических характеристик грунта в зоне расположения излучателей
представляет интерес при возбуждении вертикальной активной антенной мод с известными
номерами и характеристиками для решения задачи акустической маломодовой томографии. Для
введения амплитудно-фазового распределения необходимо знать граничные условия, т.е.
характеристики дна. Аналогичные требования возникают при оконтуривании месторождений
нефти или газоконденсата. Оценка акустических характеристик грунта вдоль трассы
31
Пленарные доклады
распространения сигналов необходима для позиционирования и решения задач акустической
дальнометрии. В случае использования активной локации знание ПФВ повышает
помехоустойчивость обнаружения «просветных» сигналов и точность оценки дистанции до
отражателя.
Идентификация модели грунта в зоне расположения приемной антенны. На первом
этапе АК выполнялась экспертная оценка параметров поля в волноводе. Полученные параметры
модели дна использовались как начальные приближения для последующей нелинейной
оптимизации. Такой подход, хотя не снимает все проблемы поиска глобального минимума, но
позволяет разместить начальную точку оптимизации в достаточно близкой окрестности от
истинных значений — характеристик грунта.
Эксперимент проводился в шельфовой зоне Японского моря. С приемного судна
опускалась вертикальная эквидистантная антенна, состоящая из 11 ГФ. Расстояние между ГФ —
около 4 м. Глубины верхнего и нижнего ГФ контролировались датчиками глубины. На
расстоянии около 12 км второе судно буксировало пневмоисточник (ПИ), который излучал
широкополосные импульсы. Расстояние между судами определялось с помощью навигационных
систем GPS, установленных на двух судах. Ноябрь, 2012 г.
На рис. 1 показаны сигналы от ПИ, принятые вертикальной антенной в широкой полосе
частот. На рис. 2 представлены сигналы мод, возбуждаемых ПИ на глубинах излучения 30 м
(рис. 2, а) и 20 м (рис. 2, б). Центральная частота фильтра – 100 Гц. Видно, что для глубины 30 м
распределение амплитуды и фазы второго прихода по глубине соответствуют третьей моде. Для
глубины 20 м распределения соответствуют второй моде. Амплитуды мод аппроксимировались
функциями
A sin( ω 2 / c 2 − ξ 2 z ) ,
где ω — центральная частота; z — глубина ГФ; A — константа; ξ — искомое продольное
волновое число моды.
На рис. 3 точками и сплошными линиями обозначены экспериментальные и расчетные
распределения амплитуд первых трех мод для частоты 100 Гц.
Рис. 1. Импульсы от ПИ в широкой полосе частот
32
Пленарные доклады
а
б
Рис. 2. Импульсы в узкой полосе частот со средней частотой 100 Гц
а, б — глубины излучения 30 м и 20 м
а
б
Рис. 3. Амплитуды трех мод
в
a, б, в — 1, 2 и 3-я моды
Рис. 4. Зависимости фазовых скоростей первых трех мод от частоты
33
Пленарные доклады
Измеренные продольные волновые числа явились исходными для построения
акустической модели грунта. Модель дна задавалась в виде M однородных жидких
поглощающих слоев. В результате оптимизации рассчитаны параметры модели грунта: первый
слой — вода, второй — жидкий грунт, лежащий на жидком или упругом полупространстве. На
рис. 4 показаны оценки
фазовых скоростей мод и их среднеквадратичные отклонения. Сплошными линиями на
рисунке изображены зависимости фазовых скоростей мод от частоты, рассчитанные с
использованием двух моделей ПФВ (табл. 1). Видно, что различие не велико.
Идентификация модели грунта в зоне буксировки излучателя. Для оценки
характеристик грунта в том же районе Японского моря и при тех же акустико-гидрологических
условиях, но в зоне расположения излучателей, использованы сигналы, зарегистрированные при
буксировке тональных источников на частотах 48, 117 и 320 Гц. Обработка производилась с
использованием метода синтезирования апертуры, то есть узкополосной фильтрации сигнала от
движущегося с постоянной скоростью в радиальном направлении относительно точки приема
тонального излучателя. Параметры модели уточнялись с использованием функционала невязки
Q , оценки которого суммировались для всех частот и глубин приема в виде:
∑( p p )/ d
Q = 1−
[(∑ p / d )(∑ p / d )]
e
k
c
k
k
k
e2
k
c2
k
k
k
1/ 2
,
k
k
где d k — значение некоторой функции в k -ой точке, учитывающей пространственное
ослабление уровня поля.
Теоретические значения ЗД вычислялись методом нормальных волн. Для минимизации
функционала невязки использовался метод Нелдера-Мида (симплекс метод). В результате
оптимизации с использованием тональных сигналов получены две модели грунта и построены
две модели ПФВ для прогноза характеристик сигнала (табл. 1, б и 1, в).
На рис. 5 с использованием моделей из табл. 1 для частоты 48 Гц и трех глубин приема
сопоставляются расчетные и экспериментальные зависимости ЗД от расстояния (сплошные и
пунктирные кривые). Глубина волновода показана на рис.5 (62.5м), глубина излучения 25,6 м.
Видно, что рассчитанное с использованием ПФВ звуковое поле формируется двумя модами, что
хорошо согласуется с данными экспериментов.
Корреляция между измеренной и рассчитанной зависимостями ЗД от расстояния:
0,94−0,97 для всех глубин приема и частот 48 и 112 Гц и 0,78−0,86 для частоты 320 Гц.
Рис. 5. Экспериментальные и расчетные зависимости звукового давления от расстояния
a — z =12 м; б — z =31,5 м; в — z =51 м; г — результаты эхолотного промера
34
Пленарные доклады
Таблица 1
Параметры грунта
Номер слоя
Толщина, м
Плотность, кг/м
Продольная и
поперечная
скорости, м/с
3
Импульсный
источник, жидкое
полупространство
1
63,1
1000
а
2
9,7
1400
1502
1602
Тональный источник,
жидкое
полупространство
Тональный источник,
упругое полупространство
1975
1
63,2
1000
б
2
7,7
1520
3
–
1970
1
63,2
1000
2
7,7
1520
3
152,2
1970
4
–
2410
1727
1502
1608
1694
1502
1608
1694
2890/1147
3
в
Аналогичные эксперименты проведены на нескольких трассах Баренцва моря при
буксировке на глубине 40 м тонального излучателя с частотой 10 Гц (район Гусинной банки,
октябрь, 1990 г.). Цель: измерение зависимости уровней и затухания звука на разных
расстояниях, оценка фазовых скоростей мод и построение модели, формирующей эти поля. Дно
в районе исследований было ровным и однородным. Изменения глубины места (240±5 м) вдоль
трасс учитывались в адиабатическом приближении методом поперечных сечений. Измерения
фазовых скоростей мод осуществлялись методом синтезированной апертуры. Выделены три
моды с фазовыми скоростями (1505±39) м/с, (1705±49) м/с и (2189±55) м/с. При использовании
модели «жидкий слой — на жидком полупространстве» декримент затухания продольных волн
в жидком слое равен 3,1×10 −2 , а в полупространстве 6,3×10 −3 .
На рис. 6 сопоставляются измеренные и рассчитанные зависимости ЗД от расстояния,
принятые на глубинах 51 и 145 м. При подборе теоретической модели производилась «ручная»
вариация толщины верхнего слоя грунта в пределах от +10м до –8 м.
а
б
Рис. 6. Сопоставление измеренного и рассчитанного с использованием построенной
модели ПФВ уровней звукового поля для глубин приема 48 м и 145 м
а — 48 м; б — 145 м
Рис. 7. Экспериментальные и рассчитанные групповые скорости мод
Цифрами отмечены номера мод; кружки соответствуют расстоянию до приемников 18600 м, точки — 16700 м
35
Пленарные доклады
Идентификация модели грунта вдоль трассы распространения сигналов. В том же
районе Баренцева моря выполнена идентификация модели грунта вдоль трассы распространения
сигналов (рис. 7). Для этого в системе единого времени с одного судна излучались импульсные
сигналы с ЛЧМ-модуляцией, а на другом они регистрировались. Расстояние между судами
определялось судовыми РЛС. Серия импульсов была выполнена на расстояниях 16750 м и
18620 м. Прием сигналов осуществлялся на несколько разнесенных по глубине одиночных
ненаправленных ГФ.
Вычисленные с применением преобразования Вигнера оценки групповых скоростей мод
V использовались для разработки акустической модели морского дна. Для этого выполнялась
минимизация функционала
L = ∑∑ (V e − V c ) 2 ,
fV
nV
где f V , nV — значения частот и количество мод на этих частотах, для которых получены оценки
групповых скоростей. Индексами e и c обозначены экспериментальные оценки и рассчитанные
значения групповых скоростей мод. В результате оптимизации с различными вариантами
моделей дна оказалось, что экспериментальные данные, зарегистрированные на низких частотах,
хорошо описываются простой моделью —однородный жидкий слой, лежащий на жидком
полупространстве. Толщина слоя 38 м, плотность 1810 кг/м 3 , скорость продольных волн
1643 м/с. Плотность грунта в полупространстве 2215 кг/м 3 , скорость продольных волн 2260 м/с.
На рис. 7 видно хорошее согласие групповых скоростей, которые получены экспериментально
или рассчитаны с применением модели ПФВ для приведенных выше параметров грунта.
Эксперименты (рис. 5) в Японском море выполнялись с использованием антенны с абсолютно
калиброванными ГФ. Это позволило с учетом ПФВ и оценки расстояния пересчитать
измеренные в точке приема значения ЗД в точку излучения. В глубоком море излучатели
предварительно калибровались с использованием образцового ГФ.
Получено p 0 = 1101 ± 198 Па·м для частоты 48 Гц, p 0 = 1778 ± 320 Па·м. для частоты
117 Гц. При буксировке того же излучателя в волноводе пересчитанные к 1 м ЗД равны: для
частоты 48 Гц p 0 = 1004 ± 201 Па·м, для частоты 117 Гц p 0 = 1667 ± 333 Па·м.
Выводы. Близость результатов АК и пересчета в точку излучения, полученных в ближней
и дальней зонах, позволяет сделать вывод, что точность оценки параметров грунта и построения
модели ПФВ достаточна для аттестации методик АК различных районов и оценки приведенной
к стандартным условиям шумности объектов. Использование импульсных или
полигармонических высококогерентных сигналов позволяет получить сопоставимые точности
АК как районов установки антенн и излучателей, так и трасс распространения сигналов. Разброс
результатов абсолютных измерений ЗД на разных приемниках вертикальной антенны и на
разных частотах соизмерим с рассчитанной погрешностью измерений, что подтверждает их
достоверность.
36
Пленарные доклады
МОДЕЛИРОВАНИЕ ФИЗИЧЕСКИХ И БИОГЕОХИМИЧЕСКИХ ПРОЦЕССОВ
В ОКРАИННЫХ МОРЯХ РОССИЙСКОЙ АРКТИКИ
С. Д. Мартьянов, канд. физ.-мат. наук
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
MODELING OF PHYSICAL AND BIOGEOCHEMICAL PROCESSES
IN THE MARGINAL SEAS OF THE RUSSIAN ARCTIC
S. D. Martyanov, Ph.D.
Shirshov Institute of Oceanology, RAS, Moscow, Russia
Кратко изложены общие проблемы численного моделирования в Северном Ледовитом океане и возможные
пути их решения. Подробнее рассматриваются результаты моделирования физических и
биогеохимических процессов в окраинных арктических морях, полученные в Санкт-Петербургском
филиале Института океанологии им. П. П. Ширшова РАН за последние годы.
The general problems of numerical modeling in the Arctic Ocean and possible solutions to them are briefly
outlined. The results of modeling of physical and biogeochemical processes in marginal Arctic seas, obtained at
the St. Petersburg branch of the Shirshov Institute of Oceanology in recent years, are presented.
Арктический регион — важный элемент глобальной климатической системы, которая
испытывает быстрые и значительные изменения в последние десятилетия. При этом, Арктика
очень уязвима к этим изменениям, что неизбежно влияет на морские экосистемы и биоресурсы
шельфовых и прибрежных районов. В этой связи резко вырос интерес к исследованиям в
Северном Ледовитом океане (СЛО). Однако, используя только данные наблюдений, сложно
исследовать связи между океаном и атмосферой в Арктике. Это вызвано малым количеством
данных прямых измерений в Арктике вследствие тяжелых условий окружающей среды и наличия
ледяного покрова. То же относится и к продуктам на основе спутниковых данных. Поэтому
математические модели остаются важным, а иногда и единственным инструментом, который
можно использовать для изучения роли Арктики в климатической системе. При этом важно
оценивать качество решения моделей, т.е. выявлять, насколько теоретические вычисления по
построенной модели отклоняются от экспериментальных данных. Локальные систематические
ошибки в моделях СЛО могут быть значительно уменьшены путем увеличения разрешения или
параметризации вихревой активности [1] и лучшего представления арктических проливов. Это
указывает на первое важное направление улучшения надежности модели. Другое направление
связано с процессами, регулирующими перемешивание вод. Модельные ошибки могут быть
вызваны также недооценкой перемешивания из-за приливов, внутренних или поверхностных
волн. Еще одним источником ошибок расчетов, особенно в арктических шельфовых морях,
является несовершенная параметризация речного стока, что влияет на вертикальное
перемешивание и расслоение вод. Представление этих процессов также влияет на адекватность
экосистемных моделей, поскольку они определяют поставку питательных веществ,
расположение пятен цветения фитопланктона и распределение взвешенного и растворенного
вещества [2].
Результаты проверки качества глобальных климатических моделей проекта CMIP (Coupled
Model Intercomparison Project), выполненной в рамках экспериментов CORE-II (Coordinated
Ocean-ice Reference Experiments — Phase II), показали, что наибольшие ошибки расчетов
океанских компонентов моделей приходятся на бассейн СЛО. В частности, модели неточно
отражают характеристики потока атлантических вод в СЛО, что приводит к большим
отклонениям в моделируемых свойствах всего Арктического бассейна. Проект промежуточного
сравнения моделей СЛО (AOMIP), который впоследствии продолжился как Форум арктического
моделирования и синтеза наблюдений FAMOS (Forum for Arctic Ocean Modeling and Observational
Synthesis), был посвящен сопоставлению ошибок этих моделей [3]. Он показал, что правильное
представление водных масс и динамики льда зависит от качества явного/параметрического
описания важнейших физических процессов и разрешающих возможностей численных моделей.
Важным, но далеко не единственным, аспектом, влияющим на достоверность
моделирования, является пространственное разрешение. Временные масштабы в модельных
37
Пленарные доклады
сценариях CMIP составляют от десятилетий до столетия, что требует значительных
вычислительных ресурсов. Учитывая данный факт, ожидаемое разрешение океанической
компоненты большинства моделей CMIP6 не превышает 1/4°. В большинстве областей этого
недостаточно для разрешения вихревой динамики. Это особенно актуально в СЛО, где
бароклинный радиус деформации, определяющий размеры мезомасштабных вихрей, составляет
7−15 км в глубоководной части Северного Ледовитого океана и 1–7 км на арктическом шельфе
морей. Это означает, что многие важные особенности динамики СЛО не могут быть разрешены
явно в моделях грубого разрешения.
В настоящее время существует множество глобальных климатических моделей,
разрабатываемых разными странами и научными институтами. В большинстве из них имеются
блоки морской биогеохимии, что позволяет выполнять расчеты с учетом явного воспроизведения
цикла углерода. Несмотря на наметившийся в последнее время успех во все более детальном с
точки зрения пространственного разрешения воспроизведения океанских процессов, приходится
признать, что глобальные модели зачастую все еще недостаточно адекватно воспроизводят
многие региональные особенности не только гидрофизических, но и в гораздо большей степени
– биогеохимических процессов. Это в полной мере относится и к шельфовым районам СЛО.
Общей проблемой таких модельных исследований зачастую является не до конца адекватный
учет поступления речных вод в океан, когда сток рек задается в виде климатических
среднемесячных значений. При этом поступление с речным стоком биогенов и других веществ
или не учитывается, или задается достаточно грубо в том или ином виде. Это означает, что
влияние речного стока и поступающих с ним биогенов лишь косвенно учитываются или вообще
игнорируются во многих существующих моделях биогеохимических циклов и морских
экосистем арктических морей.
В Санкт-Петербургском филиале Института океанологии им. П. П. Ширшова РАН в
лаборатории моделирования океанских биогеохимических циклов уже много лет выполняются
исследования, посвященные разработке региональных морских биогеохимических моделей с
целью лучшего понимания функционирования различных морских экосистем и их отклика на
изменения внешнего воздействия. В частности, была разработана совместная экогидродинамическая модель Баренцева моря [4]. Модель включает в себя 11-компонентный
биогеохимический блок и блок морского льда. Разработанная модель успешно воспроизводит
основные гидрологические характеристики Баренцева моря и характеристики морского льда, а
также поле поверхностной концентрации хлорофилла-a (рис. 1) и первичной продукции
фитопланктона, что подтверждается сравнением с данными спутниковых наблюдений за период
1998–2007 гг. Результаты расчетов показали, что за указанный период наблюдается увеличение
средней годовой первичной продукции фитопланктона вследствие уменьшения площади
морского льда. Важным результатом является то, что на основании модельных расчетов удалось
показать, что значительная часть первичной продукции (от 16 до 38 %) может производиться в
зонах, покрытых морским льдом, а также в маргинальной зоне ледового покрова. Из-за частого
возникновения подповерхностного максимума хлорофилла-а заметный вклад в первичную
продукцию могут вносить слои моря ниже верхней границы сезонного термоклина, что
невозможно учесть при использовании дистанционно измеряемых поверхностных
характеристик. Это означает, что достоверные оценки первичной продукции в покрытых льдом
морях могут быть получены только на основе эко-гидродинамических моделей, включающих
морской лед и хорошо откалиброванных по данным экспедиционных и спутниковых измерений.
Для Баренцева моря были также рассчитаны потоки углекислого газа между океаном и
атмосферой с помощью, разработанной оригинальной 7-компонентной модели океанской
биогеохимии пелагиали, включающей в себя углеродный цикл.
Расчеты показали, что наблюдается соответствие между зонами интенсивного роста
фитопланктона и положением кромки льда. Была выполнена оценка интенсивности обмена
углекислым газом между океаном и атмосферой при наличии и отсутствии биологического стока
СО2, показавшая, что пространственная изменчивость потока СО2 между океаном и атмосферой
обусловлена пространственной изменчивостью первичной продукции гораздо сильнее, чем
изменчивостью поверхностной температуры воды [5].
38
Пленарные доклады
Рис. 1. Рассчитанная поверхностная концентрация хлорофилла-a (мг м-3) на 07.06.1998
Толстая (отмечена значением сплоченности льда 0,8) и тонкая (отмечена значением сплоченности льда 0,15)
линии — граница паковых льдов и маргинальной ледовой зоны, соответственно [4]
Рис. 2. Сравнение среднемесячных значений сплоченности льда в марте, осредненных за период
2012–2021 гг., полученных с помощью спутниковых измерений (слева),
океанского реанализа GLORYS12 (в центре) и региональной модели KASM (справа) [8]
Кроме того, в рамках международного проекта EXOSYSTEM, нацеленного на изучение
воздействия опасных явлений будущего климата на морские экосистемы в Балтийском и
Баренцевом морях, была разработана совместная эко-гидродинамическая модель для акваторий
Баренцева, Карского и Белого морей на основе общей модели циркуляции Массачусетского
Технологического Института MITgcm [6]. В качестве биогеохимического блока использовалась
та же 7-компонентная модель океанской биогеохимии пелагиали [5]. Расчеты выполнялись для
периода 1975–2065 гг. Полученные в работе оценки пространственного распределения
концентрации хлорофилла-а в поверхностном слое позволили яснее понять влияние морского
льда на первичную продукцию в Баренцевом и Карском морях в условиях меняющегося климата.
Интересной представляется полученная в рамках работы связь между площадью маргинальной
зоны льда и первичной продукцией: время наступления их весенне-летних пиков совпало,
коэффициент корреляции оказался высоким, тем самым еще раз доказывая важность данной зоны
в функционировании морской экосистемы [7]. Логическим продолжением этой работы стало
более детальное исследование взаимодействия физических и биогеохимических процессов в
Карском море. Для этой цели была разработана отдельная высокоразрешающая региональная
модель KASM (Kara Sea Model) с горизонтальным разрешением около 1,5 км, работа с которой
продолжается в настоящее время с целью изучения влияния речного стока на термохалинную
структуру вод Карского моря, изучение эволюции мезо- и субмезомасштабных вихрей и влияния
явного их учета в модели на структуру вод и первичную продукцию фитопланктона. В частности,
в [8] было получено, что использование среднесуточных данных о речном стоке в модели,
основанных на данных гидрологического реанализа, дает лучшее модельное решение для
39
Пленарные доклады
Карского моря, чем использование климатических среднемесячных данных по расходу рек.
Кроме того, с помощью разработанной региональной модели KASM удалось улучшить
(рис. 2) качество воспроизведения полей температуры поверхности моря, солености, а также
сплоченности морского льда, по сравнению с результатами океанского реанализа GLORYS12 [8].
Основные улучшения включают более корректное распределение температуры, солености и
сплоченности льда в Обской губе и Енисейском заливе, а также более детальное описание
вдольберегового распределение морского льда (включая зоны припая и полыньи).
В дальнейшие планы входит объединение модели KASM с моделью морской биогеохимии
для изучения первичной продукции Карского моря и потоков углекислого газа, а также изучение
мезомасштабных и субмезомасштабных вихрей и их влияния на термохалинную структуры и
первичную продукцию.
Литература
1. Wekerle C., Wang Q., Von Appen W., Danilov S., Schourup‐Kristensen V., Jung T. Eddy‐Resolving
Simulation of the Atlantic Water Circulation in the Fram Strait With Focus on the Seasonal Cycle // JGR Oceans
2017. Vol. 122. Р. 8385–8405. https://doi.org/10.1002/2017JC012974.
2. Janout M.A., Hölemann J., Waite A.M., Krumpen T., Von Appen W., Martynov F. Sea‐ice retreat controls
timing of summer plankton blooms in the Eastern Arctic Ocean // Geophysical Research Letters. 2016. Vol. 43.
Р. 12493–12501. https://doi.org/10.1002/2016GL071232.
3. Proshutinsky A., Steele M., Timmermans M.-L. Forum for Arctic Modeling and Observational Synthesis
(FAMOS): Past, current, and future activities // J. Geophys. Res. Oceans 2016. Vol. 121. Р. 3803–3819.
4. Рябченко В. А., Горчаков В. А., Дворников А. Ю., Пугалова С. С. Оценки влияния ледового покрова
на первичную продукцию фитопланктона в Баренцевом море (по результатам трехмерного моделирования)
// Фундаментальная и прикладная гидрофизика. 2016. Т. 9, № 1. С. 41–51.
5. Martyanov S. D., Dvornikov A. Yu., Gorchakov V. A., Losa S. N. Model estimates of the ecosystem
contribution in the carbon dioxide exchange between the ocean and the atmosphere in the Barents Sea //
Fundamental and Applied Hydrophysics. 2017. Vol. 10, № 1. Р. 11-16.
6. Marshall J., Adcroft A., Hill C., Perelman L., Heisey C. A finite-volume, incompressible Navier-Stokes
model for studies of the ocean on parallel computers // J. Geophys. Res. 1997. Vol. 102(C3). Р. 5753–5766.
7. Martyanov S. D., Dvornikov A. Yu., Ryabchenko V. A., Sein D. V., Gordeeva S. M. Investigation of the
relationship between primary production and sea ice in the Arctic seas: assessments based on a small-component
model of marine ecosystem // Fundamental and Applied Hydrophysics. 2018. Vol. 11, № 2. Р. 108-117.
8. Martyanov S. D. High-Resolution Modeling of the Kara Sea Dynamics and Thermohaline Structure and
Assessment of the Impact of Various River Runoff Forcing in the Model // Water Resources. 2023. Vol. 50, № 8.
Р. 1165–1169.
Работа выполнена в рамках государственного задания Института океанологии им. П. П. Ширшова
РАН (тема № FMWE-2024-0028).
40
Пленарные доклады
СУБМЕЗОМАСШТАБНЫЕ СТРУКТУРЫ В ПРИЛИВНЫХ МОРЯХ РОССИИ
А. В. Зимин, д-р геогр. наук, О. А. Атаджанова, канд. геогр. наук, Е. И. Свергун, канд. геогр. наук,
А. А. Коник, канд. геогр. наук, А. А. Родионов, чл.-корр. РАН, Д. А. Романенков, канд. геогр. наук,
Е. В. Софьина, канд. физ.-мат. наук
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
SUBMESO-SCALE STRUCTURES IN THE TIDAL SEAS OF RUSSIA
A. V. Zimin, Dr.Sc., O. A. Atadzhanova, Ph.D., E. I. Svergun, Ph.D., A. A. Konik, Ph.D.,
A. A. Rodionov, Сorr. member of RAS, D. A. Romanenkov, Ph.D., E. V. Sofina, Ph.D.
Shirshov Institute of Oceanology, RAS, Moscow, Russia
В докладе представлены результаты широкомасштабных исследований характеристик
субмезомасштабных структур (субмезомасштабных вихрей и короткопериодных внутренних волн) в
морях Северного Ледовитого и Тихого океанов. Методологическую основу исследований составляет
комплексная обработка разнородных высокоразрешающих по времени и пространству данных
спутниковых и экспедиционных наблюдений с привлечением результатов численного моделирования
путем их сопоставления, картографирования, статистической обработки. Показано, что
субмезомасштабные вихревые структуры и короткопериодные внутренние волны в теплый сезон
постоянно наблюдаются на всех рассмотренных акваториях. Вихри имеют в основном циклонический
тип вращения, при этом средние оценки диаметров антициклонических структур больше циклонических.
Короткопериодные волны проявляются в основном в виде пакетов, регулярное появление которых
обуславливается
особенностями
приливных
процессов.
Районы
частой
встречаемости
субмезомасштабных вихрей, как правило, связаны с областями динамики фронтов различного генезиса,
периферией мезомасштабных вихрей и неровностями дна. Для Баренцева моря Северного ледовитого
океана и Курило-Камчатского региона Тихого океана продемонстрировано, что положение областей
частой встречаемости короткопериодных волн преимущественно совпадает с положением
потенциальных очагов генерации внутренних приливных волн.
The report presents the results of comprehensive studies on the characteristics of submesoscale structures
(submesoscale eddies and short-period internal waves) in the Northern Arctic and Pacific Oceans.
The methodological basis of the research is the comprehensive processing of diverse high-resolution in time and
space satellite and expeditionary observation data, with the involvement of numerical modeling results through
their comparison, mapping, and statistical processing. It has been shown that manifestations of submesoscale eddy
structures and short-period internal waves are consistently present in all the considered water areas during
the warm season. Eddies are primarily cyclonic in rotation type, with mean estimates of the diameters of
anticyclonic structures being larger than cyclonic ones. Short-period waves manifest mainly in the form of packets,
with their reappearance being determined by the peculiarities of tidal processes. Areas of frequent occurrence of
submesoscale eddies are usually associated with areas of front dynamics of various genesis, the periphery of
mesoscale eddies, and seafloor irregularities. For the Barents Sea of the Northern Arctic Ocean and the KurilKamchatka region of the Pacific Ocean, it has been demonstrated that the location of the areas of frequent
occurrence of short-period waves predominantly coincides with the locations of potential sources of generation
of internal tidal waves.
До настоящего времени большинство программ наблюдений в Мировом океане в основном
нацелены на исследование особенностей режима крупномасштабной циркуляции и процессов
мезомасштаба. Весьма часто они сочетаются со специализированными исследования процессов
в микроструктурном интервале изменчивости, определяющими перемешивание и диссипацию
энергии. При этом процессы и явления в промежуточном интервале с горизонтальным
масштабом порядка сотен метров единиц километров и на временном интервале от долей часов
до суток, так называемом субмезомасштабе, остаются фактически вне поля исследователей.
Изменчивость на этом масштабе обычно ассоциируется с короткопериодными внутренними
волнами (КВВ) и субмезомасштабными (малыми) вихрями (СМВ). В силу несовершенства
теоретического описания и трудностей экспериментальных наблюдений субмезомасштабных
структур обусловленная ими изменчивость гидрофизических полей оказалась недостаточно
изученной в прошлые десятилетия, особенно в морях Арктики и шельфе Тихого океана.
В то же время, согласно [1], за последние десятилетия произошло существенное
ослабление вертикальной стратификации в Евразийском секторе Северного Ледовитого океана,
41
Пленарные доклады
в результате чего значительно большее количество тепла подповерхностных атлантических вод
попадает к поверхности и оказывает прямое влияние на состояние ледяного покрова. При этом
отмечается, что динамика КВВ и СМВ является ключевым механизмом интенсификации
перемешивания, вертикального и горизонтального переноса тепла и соли. В работе [2] на основе
контактных измерений и использования полностью нелинейной негидростатической модели
MITgcm было показано, что генерация короткопериодных внутренних волн к северу от
критической широты для лунного полусуточного прилива M2 (74,5° с.ш.) является важным
аспектом вертикального перешивания и передачи энергии приливов к мелкомасштабной
турбулентности.
Отметим также, что наблюдаемое в XXI веке очищение субарктического и арктического
региона от льда в летне-осенний и зимний периоды [3] позволяет в настоящее время эффективно
использовать методы дистанционного зондирования океана из космоса для исследования мезои субмезомасштабных процессов в поверхностном слое, что создало благоприятные
предпосылки для проведения широкомасштабных исследований.
Для сбора информации в рамках комплексных исследований была разработана методика
специализированного мониторинга [4], включающая спутниковую и судовую подсистемы
наблюдений. Спутниковая подсистема наблюдений позволяет получить представления о
пространственном распределении КВВ, СМВ, мезомасштабных вихревых структур,
фронтальных разделов и их динамике на обширной акватории. В основе ее эксплуатации лежит
использование данных со спутников ENVISAT (ASAR), RADARSAT (SAR), Sentinel 1-A и 2-A,
ALOS-2 PALSAR-2 и Aqua/Terra (MODIS). По данным спутниковых наблюдений выбираются
районы работ судовой подсистемы мониторинга. Она включает в себя микромасштабные
океанографические съемки с привязкой результатов наблюдений к фазе приливных колебаний
уровня и измерения на полигонах из буйковых станций, дополненные данными учащенных
океанографических станций (сканирований).
На основании созданной методики комплексного мониторинга было выявлено широкое
распространение КВВ и СМВ на акватории Белого моря, а также получены их статистические
характеристики [4]. Была отмечена регулярность наблюдений КВВ в определенную фазу
прилива, средняя длина зарегистрированных волн составила 500 м, период — 11 мин. Чаще всего
КВВ наблюдались в виде пакетов по 2–4 волны. Было установлено, что районами активной
генерации КВВ в Белом море являются зоны фронтов. Вблизи этих зон, в отдельных районах
ежегодно, отмечались интенсивные внутренние волны (ИВВ), обладающие значительной
нелинейностью с высотами более 10 м. СМВ с размерами от 2 до 8 км чаще всего
регистрировались в близи неровностей дна и фронтальных зон. Над банками около Соловецких
островов образование СМВ отмечалось в определенную фазу прилива, а характерное время
существования составляло несколько часов, при этом вихревые структуры охватывали верхний
слой и прослеживались до пикноклина.
Расширение рамок исследований на акваторию других морей Северного Ледовитого
океана нашло обобщение в серии работ [5, 6], где был выполнен пространственно-временной
изменчивости характеристик субмезомасштабных вихрей на акватории Белого, Баренцева и
Карского морей по их поверхностным проявлениям на спутниковых радиолокационных
изображениях (РЛИ) в теплый (безледный) период года. В результате анализа спутниковых
измерений за два летних сезона для трех арктических морей выявлен 3591 случай регистрации
поверхностных проявлений малых вихрей.
Выделены области частой регистрации СМВ: в Белом море — Двинский залив, районы
севернее Соловецких островов и вблизи Терского берега; в Баренцевом море — южная часть
моря, районы к западу от архипелага Земля Франца-Иосифа, возле восточного берега острова
Западный Шпицберген, между архипелагами Новая Земля и Земля Франца-Иосифа и в Карском
море — между северной частью архипелага Новая Земля и полуостровом Ямал.
Было установлено, что в арктических морях основные механизмы формирования вихревых
структур, связаны с динамикой и неустойчивостью в области фронтов различного
происхождения, а также с топографическими эффектами. Пик наибольшей вихревой активности
наблюдался в июле для Баренцева и Белого морей и в августе — для Карского моря. Отметим,
что в Карском и Белом морях значительное количество вихрей располагается вблизи
42
Пленарные доклады
фронтальных зон речных плюмов, причем в Карском море в максимум речного стока по
климатическим нормам приходится на август, а в Белом море — на июль.
Наиболее обширные результаты исследования СМВ в шельфовых районах российской
акватории Тихого океана и Беринговом море представлены в [7]. По данным спутникового
мониторинга большая часть проявлений вихрей зафиксирована в северной мелководной части
Берингова моря, в заливах Камчатского полуострова и проливах Буссоль и Четвертый
Курильский. Средний диаметр вихревых структур в Бериговом море составил 2,9 км, в КурилоКамчатском регионе 4,3 км, что соответствует средним за летний сезон оценкам бароклинного
радиуса Россби для мелководных районов рассматриваемых акваторий. Установлено, что вихри
чаще всего регистрировались в августе в условиях максимального развития сезонного
пикноклина в обоих регионах. Показано, что значительное количество СМВ детектировалось на
периферии мезомасштабных вихрей.
Развитие идей, заложенных в [4], легло в основу метода оценки преобладающих
механизмов генерации КВВ на основе синтеза данных наблюдений и глобальной баротропной
приливной модели [8, 9].
Анализ спутниковых данных за период с декабря 2018 года по ноябрь 2019 года показал,
что в Баренцевом море проявления КВВ на РЛИ не регистрируются с октября по май. Минимум
количества проявлений отмечается в начале июня и в середине сентября, а максимум — в начале
августа. Для Курило-Камчатского региона было показано, что в феврале регистрируется
минимальное число проявлений, а в июле — максимальное. Установлены новые районы
регулярной встречаемости КВВ, расположенные в Баренцевом море у о. Надежды, западнее
архипелага Новая Земля и у м. Желания, а в Курило-Камчатском регионе у о. Кунашир, над
Хребтом Витязь, а также у м. Шипунский и в Камчатском заливе.
Применение метода оценки преобладающих механизмов позволило выявить, что в
Баренцевом море у м. Святой Нос КВВ генерируются по типу запрепятственных волн, а в
Авачинском заливе у м. Шипунский — при дезинтеграции внутреннего прилива [8]. Для
Баренцева моря и Курило-Камчатского региона Тихого океана было продемонстрировано, что
положение «горячих точек» (районы частой регистрации) в поле проявлений КВВ
преимущественно совпадает с положением потенциальных очагов генерации внутренних
приливных волн (ВПВ). В Баренцевом море в областях очагов генерации ВПВ находится до 64 %
проявлений КВВ в сентябре. В Курило-Камчатском регионе доля проявлений КВВ в очагах
генерации ВПВ до 70 % в августе. Это указывает на механизм генерации КВВ как результат
локальной дезинтеграции субинерциальных ВПВ [9]. На примере Курило-Камчатского региона
было показано, что на акватории от мыса Лопатка до мыса Опасный в области вихревых структур
находится 70 % от общего числа проявлений в указанном районе. То есть наряду с приливной
динамикой на выделенном участке акватории Тихого океана важную роль в генерации КВВ
играет мезомасштабная вихревая динамика.
На основе созданной и совершенствующейся методики специализированного мониторинга
сформированы представления о распространённости субмезомасштабных структур
(субмезомасштабных вихрей и короткопериодных внутренних волн) в морях Северного
Ледовитого и Тихого океанов. Сформулированы представления о закономерностях
взаимодействия разномасштабных океанологических явлений и процессов, обуславливающих
изменчивость гидрофизических полей на субмезомасштабном интервале изменчивости в
приливных морях.
Литература
1. Polyakov I. V., Pnyushkov A. V., Alkire M. B., Ashik I. M., Baumann T. M., Carmack E. C., Goszczko I.,
Guthrie J., Ivanov V. V., Kanzow T., Krishfield R., Kwok R., Sundfjord A., Morison J., Rember R., Yulin A. Greater
role for Atlantic inflows on sea-ice loss in the Eurasian Basin of the Arctic Ocean // Science. 2017. Vol. 356,
№ 6335. P. 285–291. DOI:10.1126/science.aai8204.
2. Rippeth T. P., B. J. Lincoln, Y.-D. Lenn, J. A. M. Green, A. Sundfjord, S. Bacon. Tides stir-up deep
Atlantic heat in the Arctic Ocean // Nature Geoscience. 2015. DOI:10.1038/NGEO2350.
3. Ivanov V. V., Alexeev V. A., Repina I., Koldunov N. V., Smirnov A. Tracing Atlantic Water Signature in
the Arctic Sea Ice Cover East of Svalbard // Advances in Meteorology. 2012. Vol. 2012. P. 1–11,
DOI:10.1155/2012/201818.
43
Пленарные доклады
4. Зимин А. В. Субприливные процессы и явления в Белом море. М: Геос, 2018. 220 с.
5. Атаджанова О. А., Зимин А. В., Романенков Д. А., Козлов И. Е. Наблюдение малых вихрей в
Белом, Баренцевом и Карском морях по данным спутниковых радиолокационных измерений // Морской
гидрофизический журнал. 2017. № 2. С. 80–90.
6. Атаджанова О. А., Зимин А. В., Свергун Е. И., Коник А. А. Субмезомасштабные вихревые
структуры и фронтальная динамика в Баренцевом море // Морской гидрофизический журнал. 2018. № 3.
С. 237–246. DOI:10.22449/0233-7584-2018-3-237-246.
7. Зимин А. В., Атаджанова О. А., Коник А. А., Круглова К. А. Малые вихревые структуры
Берингова моря и шельфа Курило-Камчатского региона по данным спутниковой радиолокации за тёплый
период 2020–2021 гг. // Современные проблемы дистанционного зондирования Земли из космоса. 2023.
Т. 20, № 4. С. 239–249. DOI:10.21046/2070-7401-2023-20-4-239-249.
8. Свергун Е. И., Зимин А. В., Романенков Д. А., Софьина Е. В. Короткопериодные внутренние
волны в шельфовых районах с интенсивной приливной динамикой // Изв. РАН «Физика атмосферы и
океана». 2022. Т. 58, № 6. С. 690–705. DOI:10.31857/S0002351522060165.
9. Svergun E. I., Sofina E. V., Zimin A. V., Kruglova K. A. Seasonal variability of characteristics of
nonlinear internal waves in the Kuril-Kamchatka region by Sentinel 1 data // Continental Shelf Research. 2023.
Vol. 259. Р. 104986. DOI:10.1016/j.csr.2023.104986.
Исследование выполнено за счет средств государственного задания FMWE-2024-0028 и частично
за счёт гранта Российского научного фонда № 23-17-00174 (https://rscf.ru/project/23-17-00174/).
44
Пленарные доклады
АППАРАТЫ-ПЛАНЕРЫ В ЗАДАЧАХ ПОДВОДНОГО НАБЛЮДЕНИЯ
В. В. Коваленко1,2,3, канд. техн. наук, А. А. Родионов 2, чл.-корр. РАН, И. А. Селезнев3, д-р техн. наук
1
Научный совет по комплексной проблеме «Гидрофизика» РАН
2
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
3
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
GLIDERS IN UNDERWATER SURVEILLANCE TASKS
V. V. Kovalenko1,2,3, Ph.D., A. A. Rodionov2, Corr. member of RAS, I. A. Seleznev3, Dr.Sc.
1
Hydrophysical Science Council, Moscow, Russia
2
Shirshov Institute of Oceanology, RAS, Moscow, Russia
3
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Описаны специфические требования, конструктивные особенности и полезная нагрузка, характерные для
аппаратов-планеров (глайдеров), при их использовании в задачах подводного наблюдения по
гидроакустическому и гидрофизическим полям
The specific requirements, design features and useful payload of underwater glider vehicles for their use in
underwater intelligence, surveillance and reconnaissance (ISR) tasks in hydroacoustic and hydrophysical fields
are described.
Анализ тенденций развития наукоемкого направления, называемого подводным
наблюдением, позволяет констатировать изменение лежащих в его основе принципов и научной
базы. Назначением систем подводного наблюдения является обеспечение безопасности морских
объектов. Анализу тенденций в области безопасности морских объектов посвящена работа [1].
К тенденциям отнесены: 1) соответствие исследований и разработок поставленным задачам; 2)
распределенный в пространстве характер систем; 3) рассчитанную на поля различной
физической природы сенсорную часть систем; 4) мульти-платформенный характер систем (т.е.
использование надводных, подводных и воздушно-космических носителей); 5) сочетание систем
наблюдения и систем оценки состояния океанической среды; 6) опора на автономные
необитаемые аппараты. В основу современных разработок кладутся сочетания этих принципов.
Данная работа посвящена анализу использования робототехники планерного типа с учетом
приведенных выше базовых принципов. Анализ литературы создает впечатление, что решение
практических задач всё в большей степени опирается на автономные аппараты. Нельзя считать
случайным соглашение ведущих стран НАТО об объединении усилий в деле разработки морских
необитаемых систем [2]. Заслуживают внимания разработки концептуальных предложений [3]
по решению задачи борьбы с подводными угрозами, основанному на использовании
необитаемых средств. Введено и используется понятие робото–центричности (unmanned —
centric), как современной парадигмы, в рамках которой основой решения задач являются
беспилотные аппараты. Вопросу развития морской робототехники в России и, в частности,
подводным аппаратам-планерам уделено значительное внимание [4]. Нашей целью является
дополнить ранее изложенный материал.
Характеристики ориентированных на подводное наблюдение планеров. За двадцать
лет, истекших с момента разработки мастер−плана развития подводной робототехники в США
[5] основные положения этого документа, в основном, сохранили свою силу. Заметным вкладом
в обсуждаемую тему в этот же период была работа [6], узкоспециализированная на исследовании
только глайдеров. С позиций сегодняшнего дня в этих, двадцатилетней давности, работах
заметно некоторое несоответствие тем базовым принципам, которые были изложены выше.
В частности, вопросы измерения характеристик океанической среды и подводного наблюдения
сейчас часто рассматриваются совместно. Сейчас ясно, что это, в общем случае, не отдельные
задачи, а составные части целого. Содержащееся в [6] изложение принципов формирования
функциональных классов аппаратов-планеров, увязанное с широким спектром потребностей
пользователей применительно к условиям мелкой и глубокой воды, представляется актуальным.
К особенностям аппаратов-планеров относят следующие их свойства. Это: 1) большая
продолжительность работы и возможность перемещения на большие расстояния; 2) скрытность
(низкий уровень собственного шума и малое акустическое поперечное сечение, почти полное
45
Пленарные доклады
отсутствие гидрофизических возмущений); 3) способность перемещения по глубине;
4) возможность пополнения запаса энергии от природных явлений. В соответствии со
свойствами аппаратов-планеров, как носителей полезной нагрузки, и с учетом различных
окружающих условий, они разделены на следующие функциональные классы. Это: 1) аппараты,
способные к перемещению в заданных пределах по глубине; 2) аппараты, способные к
удержанию своего положения в виде виртуальных станций; 3) аппараты, предназначенные для
доставки полезной нагрузки. Охарактеризуем кратко каждый из указанных функциональных
классов.
Функциональный класс глайдеров, обладающих возможностью перемещения в режиме
заданных ограничений по глубине, необходим тогда, когда требуются операции на мелководье
прибрежной зоны или когда аппарат должен работать в предписанном секторе водной толщи,
таком как звуковой канал, или термоклин. Для адаптации конструкции к этой роли требуются
некоторые или все из следующих возможностей: пологий наклон глиссады, позволяющий
увеличить дальность полета при минимальном количестве циклов погружения-всплытия,
высокие скорости для преодоления сильных прибрежных течений, умеренный объем полезной
нагрузки. Требуются также быстрая реакция на крен и дифферент, адекватное внешнее
управление и способность избегать препятствий. Потенциальные применения глайдеров этого
класса включают: 1) использование в виде патрулирующего аналога гидроакустического буя;
2) подводное наблюдение на мелководье; 3) патрулирование побережья; 4) формирование
барьерных систем; 5) проникновение в закрытые для обитаемых платформ акватории, например,
в гавани.
Функциональный класс глайдеров, обладающих способностью удержания своего
положения в заданных точках пространства, необходим в случаях: 1) формирование
реконфигурируемых антенных решеток, включая создание полей вертикальных антенн в толще
воды или опускаемых на дно; 2) формирование барьерных систем в узкостях, проливных зонах
и на стратегических направлениях; 3) наблюдение за трафиком надводных и подводных судов;
4) использование сенсоров различных физических полей; 5) профилирование свойств
океанической среды в заданных точках. Глайдеры этого функционального класса требуют
адекватной скорости с тем, чтобы в условиях океанских течений перемещаться и удерживать
позицию. Потребуется адекватное управление планером при работе вблизи поверхности, а также
меры по предотвращению соприкосновений с надводными судами.
Следующий функциональный класс глайдеров предназначен для доставки полезной
нагрузки. Эта функция может потребовать от планера качеств, способствующих преодолению
им как океанской циркуляции, так и прибрежных течений. Потенциальные варианты применения
глайдеров этого функционального класса включают: 1) скрытную доставку средств подводного
наблюдения; 2) проникновения в закрытые районы прибрежных зон в роли платформы-носителя,
с которой развертываются системы мониторинга; 3) выполнение функций материнской
платформы. В работе [6] приведена информация о применениях в интересах ВМС глайдеров,
классифицированных в виде функциональных классов. Эта информация может использоваться
при разработке концепций систем подводного наблюдения.
Полезная нагрузка аппаратов-планеров. Пакеты полезной нагрузки [6−8]. Сенсоры и
другие полезные нагрузки обычно рассматриваются в 2-х конфигурациях: 1) одиночные
нагрузки, состоящие из одного типа сенсоров, 2) связанные или смешанные нагрузки, состоящие
из комбинаций нескольких сенсоров. Это «пакеты полезной нагрузки». Существующие планеры
изначально были спроектированы с учетом базовых сенсорных нагрузок, таких как CTD.
Впоследствии в конструкцию глайдеров была введена модифицируемая модульная секция,
допускающая расширение. Существующими примерами видов полезной нагрузки являются:
акустический модем, CTD, ADCP, акустические и не акустические средства.
Акустические сенсоры. Признано, что эффективным вариантом оснащения глайдеров
являются буксируемые антенные решетки гидрофонов. Конформные и пространственноразвитые носовые антенны глайдеров конструируются с учетом отстройки от их собственных
шумов. Важным является вопрос об автоматическом распознавании целей. Соответствующий
этой задаче софтвер разработан. Совокупностям глайдеров с перекрывающимися зонами
наблюдения придана способность осуществления сопровождения обнаруженной цели.
Имеющие указанные свойства сети глайдеров, способны обеспечить осуществление
46
Пленарные доклады
разведывательной деятельности в подводном пространстве прибрежных районов. Для
минимизации проявления активности элементов сети в моменты их всплытия необходимо
удовлетворение ряду критических требований, среди которых занятие сенсорами оптимального
положения в водном слое. Полученные результаты свидетельствуют о том, что глайдеры
являются эффективными мобильными платформами, способными поддерживать устойчивое
акустическое наблюдение [7]. Способность автономных подводных глайдеров к длительному
пребыванию в море делает их предпочтительными платформами для поддержки мобильных
акустических систем подводного наблюдения.
Неакустические сенсоры и применение планеров. В силу ограниченных возможностей
глайдеров, как носителей, акцент делается на сенсорах небольшого размера со сверхнизкими
требованиями к энергопотреблению. Сюда входят: датчики магнитных и электрических полей,
оптические сенсоры и сенсоры турбулентных возмущений. Как правило, отдельные
неакустические сенсоры или их совокупности объединяются с акустическими сенсорами для
улучшения возможностей планера. Возможности каждого класса сенсоров основаны на
описании того явления, которое представляет интерес для наблюдения. Большинство
применений сенсоров, которыми оборудуются планеры, ориентированы на их использование в
мелководных условиях.
Турбулентный след и возможности обнаружения подводного объекта [9]. Среди
вызываемых движением подводного тела физических явлений, проявляющихся в водном слое и
на поверхности моря, в работах [9] выделяются горб Бернулли, волны Кельвина, турбулентный
след и аэрированные массы воды. Среди упомянутых физических явлений турбулентный след
выделяется, как принципиально неустранимое и долгоживущее явление, энергетика которого
неравномерно распределена в толще водного слоя. Максимальное её значение находится на
горизонте нахождения тела с расширением возмущенной области при удалении от объекта.
Отмечается, что в качестве регистратора пузырькового следа можно использовать
высокочастотную (> 10 кГц) активную гидроакустику, а в качестве регистратора турбулентного
следа – контактные датчики. Из-за неравномерного распределения энергетики турбулентных
возмущений в водном слое «след» движущегося тела относительно локализован, и, несмотря на
эффекты всплытия, проявления этого явления на поверхности моря чрезвычайно незначительны,
а в условиях волнения трудно идентифицируемы. Но его регистрация в толще воды возможна.
Согласно [9] обнаружение турбулентного следа движущихся подводных объектов в воде может
быть осуществлено с помощью различных датчиков, в том числе регистраторов давления,
электропроводности, температуры (CTD), скорости потока частиц (ADCP). Важно правильно
осуществить комплексную обработку сигналов различной модальности с вынесением конечного
решения. Такое оборудование было разработано рядом компаний. Отметим комплекс MicroRider
фирмы Rockland Scientific. Этот комплекс был установлен на планере и испытан в море. Для
выполнения функций подводного наблюдения аппарат-планер был оснащен вспомогательным
винтовым движителем.
Такое решение привело к способности аппарата долгое время находиться в море,
сканировать водную толщу и совершать необходимое для решения задач подводного
наблюдения маневрирование. Для определения своего местоположения планер оснащен
приемником сигналов навигационной системы GPS. Для работы в сети и передачи информации
планер оснащен средствами связи (акустической и радио). На основе измерения колебаний
сдвигового потока и проводимости, а также микро-флюктуаций температуры воды
рассчитывается средняя турбулентная энергия в определенном диапазоне глубин. Расчет
значений турбулентной энергии осуществляется циклически в процессе перемещения аппаратапланера с учетом изменения характеристик окружающей среды, включая температуру соленость
и давление. Если на пути планера возникает аномальная по отношению к характеристикам
окружающей среды турбулентная трасса, то поведение планера меняется. Включаются привод
винтового движителя и алгоритмы измерения характеристик «турбулентной дорожки» от
объекта, оценки ее параметров и слежения за объектом. Применяется адаптивное
маневрирование планера. Среди оцениваемых характеристик возмущенной турбулентной трассы
— её ширина. Алгоритм её оценивания использует фактические измеренные данные,
корректируемые на скорость движения планера и угол его траектории. Для оценки направления
движения источника турбулентных возмущений алгоритм предусматривает использование
47
Пленарные доклады
данных ряда пересечений следа. Поскольку обнаружение осуществляется с использованием
контактных сенсоров (т.е. с низкой поисковой производительностью), на практике применяют
системы группового (из 3−5 планеров) использования аппаратов. Для того, чтобы группа
работала как единая система, отдельные планеры объединяются средствами сетевой связи. Такая
связь осуществляется путем использования гидроакустических и оптических устройств. Тем
самым достигается обмен данными о местоположении отдельных планеров, передаются сигналы
управления и полезная информация об обнаруженных неоднородностях водного слоя (так
называемые, турбулентные треки). В работе [9] приводятся данные о том, что практическое
применение размещаемых на подводных платформах обнаружителей турбулентного следа
позволило сделать вывод о перспективности и высокой эффективности таких средств. Там же
отмечена возможность совмещения гидрофизических и гидроакустических средств мониторинга
подводного пространства. Намечены пути улучшения показателей системы наблюдения,
использующих оснащенные винтовыми движителями подводные аппараты. Среди этих путей
выделяются: 1) оптимизация совместного функционирования группы аппаратов, 2) повышение
скорости аппаратов, 3) развитие технологий и средств связи. Особо отмечается необходимость
дальнейшего развития физических исследований турбулентных явлений, вызываемых
движущимися подводными объектами, как в теоретическом, так и в экспериментальном
отношении.
Системы связи. Оценка текущих подходов. Горизонтальная дальность связи с
использованием акустических модемов, изменяется в интервале от 0,5 до 6 миль в зависимости
от глубины места, уровней окружающего шума, условий распространения, выходной мощности
модема, скорости передачи данных и особенностей места. Скорость передачи данных изменяется
в пределах от примерно 50 до 10000 бит в секунду в зависимости от указанных факторов и от
полосы частот модема, метода модуляции и конфигурации приемной антенны. Конструкция
шлюза состоит из модулей радио, акустики и управления.
Управление множеством аппаратов-планеров. В большинстве решаемых в морской
сфере задач требуется информация от пространственно-развитой системы сбора данных об
окружающей среде и находящихся в ней объектах. Применительно к подводной среде нужна
сетка измерителей, получающих информацию не только в азимутальной плоскости, но и по
третьей координате (глубине). Рассчитанные на долговременное пребывание в море аппаратыпланеры могут рассматриваться как компоненты пространственно-развитой системы
измерителей. В этом случае группа рассматривается как адаптивная сенсорная сеть. Эта сеть
управляется, как правило, из единого центра, осуществляющего функции распределения
поисковыми усилиями множества глайдеров, т.е. распределением их позиций и характеристик
полета. Для управления глайдерами необходима сеть связи. С помощью этой сети
осуществляется загрузка в глайдеры параметров новых миссий или корректура уже
выполняемых. Управляющий центр способен собирать и распределять информацию. Имеется
возможность корректировки поведения сети. Управляющий центр использует также внешнюю
по отношению к сети глайдеров информацию.
Заключение или мотивация использования глайдеров. Очевидно, в наше время
происходит переход от привычных методов построения систем подводного наблюдения и
оценки состояния среды к сетевым методам, основанным на использовании автономных
аппаратов. Новая концепция видится как основанная на совместном использовании автономных
аппаратов, работающих в различных средах (над водой, под водой и в воздухе). В таких системах
долгоживущие сети или элементы этих сетей, основанные на использовании аппаратов-планеров
способны осуществлять задачи подводного наблюдения и оценки окружающей среды.
Литература
1. Коваленко В. В. Безопасность морских объектов. Новые угрозы и вопросы их нейтрализации //
Морские информационно-управляющие системы 2023. № 1 (23). С. 4−25
2. NATO News: Thirteen Allies to cooperate on the introduction of Maritime Unmanned Systems. 2018.
https://www.nato.int/cps/en/natohq/news_158672.htm.
3. Clark B. The Emerging Era in Undersea Warfare // Center for Strategic Assessment, 2015.
48
Пленарные доклады
4. Кожемякин И. В., Блинков А. П., Рождественский К. В., Рыжов В. А., Мелентьев В. Д.,
Занин В. Ю. Перспективные морские робототехнические системы // Известия ЮФУ «Техн. науки». 2016.
№ 1.
5. U.S. Department of the Navy, The Navy Unmanned Undersea Vehicle UUV Master Plan. 2004.
8. Jenkins S. A. Underwater glider system study // Scripps Inst. of Oceanogr. Tech. Rep. 2003. № 53.
9. Bradley J. Nott Long-endurance maritime surveillance with ocean glider networks Master’s thesis Master
of Science in physical oceanography // Naval Postgraduate School Monterey, CA. 2015. Р. 93943–5000.
http://hdl.handle.net/10945/47308.
8. Terracciano D. S., Bazzarello L., Caiti A., Costanzi R., Manzari V. Marine Robots for Underwater
Surveillance // Current Robotics Reports. 2020. https://doi.org/10.1007/s43154-020-00028-z.
9. Yongchol Lee, Sehan Lim, Jong Jin Park. A Study on Anti-Submarine Surveillance Systems using
Submarine's Turbulent Wake // Journal of the Korea Institute of Military Science and Technology. 2012.
https://www.researchgate.net/publication/234140005.
49
Пленарные доклады
АДАПТИВНЫЕ ЛАЗЕРНЫЕ СЕЙСМОГРАФЫ И ГИДРОФОНЫ
Л. В. Григорьев1,2, канд. физ.-мат. наук, А. А. Семенов2, д-р техн. наук
1
СПб государственный университет, Санкт-Петербург, Россия
2
СПб государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
LASER ADAPTIVE SEISMOGRAPHS AND HYDROPHONES
L. V. Grigoryev1,2, Ph.D., A. A. Semenov2, Dr.Sc.
1
St. Petersburg State University, St. Petersburg, Russia
2
St. Petersburg State Electrotechnical University «LETI», St. Petersburg, Russia
Представлены результаты исследований по созданию адаптивных волоконно-оптических и интегрально
оптических гидрофонов, сейсмографов, предназначенных для работы в низкочастотной (НЧ) и
ннфранизкочастотной (ИНЧ) акустических диапазонах спектра. Адаптивные лазерные сейсмографы и
гидрофоны были созданы на основе волоконно-оптических приемников акустического давления был
использован интерферометр Маха-Цендера с «узлом» сложения оптических сигналов на основе
фоторефрактивного кристалла, в котором была сформирована динамическая голографическая решетка.
The results of research on the creation of adaptive fiber-optic and integrated optical hydrophones and
seismographs designed to operate in the low-frequency (LF) and low-frequency (LF) acoustic ranges of the
spectrum are presented. Adaptive laser seismographs and hydrophones were created on the basis of fiber-optic
acoustic pressure receivers. A Mach-Zehnder interferometer was used with a “node” for combining optical signals
based on a photorefractive crystal, in which a dynamic holographic grating was formed.
Инфранизкочастотные и низкочастотные сейсмодатчики, в своей массе, основаны на
регистрации микроперемещений, обусловленных воздействием низкочастотных сигналов на
чувствительный элемент первичного преобразователя акустического поля и дальнейшем
преобразовании акустического сигнала или ускорения в оптический или электрический сигнал.
В этой связи оптическая интерферометрия является одним их наиболее чувствительных методов
регистрации микроперемещений [1]. В свою очередь чувствительность оптических
интерферометров ограничена уровнем шумов фотодетектора [2]. В случае использования для
регистрации инфранизкочастотного сигнала (ИНЧ) обеспечение высокой чувствительности
лазерного сейсмографа может быть осуществлено за счет использования различных типов
многовитковых волоконно-оптического датчиков акустического сигнала [3−5].
В настоящей работе рассмотрен адаптивный лазерный интерферометр на основе
волоконно-оптического интерферометра Маха-Цендера, который может быть использован как
сейсмограф/гидрофон или геофон в ИНЧ/НЧ полосах акустического спектра. В качестве
первичного датчика инфранизкочастотного или низкочастотного сигнала был использован
многовитковый волоконно-оптический приемник акустического сигнала. В качестве модуля,
осуществляющего оптическую фазовую демодуляцию оптического сигнала был использован
адаптивный голографический интерферометр на основе фоторефрактивного кристалла титаната
бария. Использование кристаллов титаната бария обусловлено тем, что в них может быть
записана голографическая решетка, которая имеет высокую степень контрастности (до 99 %) и
которая может долгое время сохраняться в фоторефрактивном кристалле. Это обстоятельство
обуславливает возможность полностью оптического управления в голографическом
интерферометре и обеспечивает долговременную стабильность параметров, что в свою очередь
дает возможность использования голографического интерферометра в широком температурном
диапазоне. Применение голографического интерферометра с периодической перезаписью
динамических голограмм, кроме того, позволяет скорректировать влияние медленно
изменяющихся во времени следующих процессов: дрейфа температуры, изменения
гидростатического давления, изменения механических величин измерительного комплекса.
Все эти меры позволяют скомпенсировать временной дрейф рабочей точки
интерферометра и обеспечить стабилизацию рабочей точки лазерного интерферометра.
Схема лазерного адаптивного интерферометра — который может быть использован в
качестве сейсмографа, ИНЧ/НЧ гидрофона или геофона приведена на рис. 1.
50
Пленарные доклады
Рис. 1. Схема построения лазерного адаптивного интерферометра
1 — DPSS-лазер; 2 — модуль компенсации; 3 — волоконно-оптический датчик ИНЧ акустического поля;
4 — фоторефрактивный кристалл; 5 — микроконтроллер; 6 — поляризатор; 7 — λ/4 пластина;
8 — фотоприемный модуль; 9 — волоконный Υ-разветвитель
Принцип работы лазерного голографического ИНЧ гидрофона/сейсмографа состоит в
следующем. Излучение от DPSS-лазера (1) мощностью 25 мВт разделяется с помощью
волоконно-оптического Y-разветвителя (9) вводится в два одномодовых оптических волоконных
световода. Как известно, одно плечо волоконно-оптического интерферометра Маха-Цендера
является опорным, второе плечо — измерительным. В опорном плече интерферометра стоит
волоконно-оптический компенсатор (2) (пьезоцилиндр с намотанным на него волокном) с
помощью которого происходит предварительная компенсация различия в оптических путях в
плечах интерферометра и первичная установка положения рабочей точки интерферометра.
В опорном плече помещены поляризатор (6) и четвертьволновая пластина (7). При прохождении
света через поляризатор и λ/4 пластину свет приобретает эллиптическую поляризацию и далее
из опорного плеча интерферометра попадает в фоторефрактивный кристалл (4) титаната бария,
среза (100), вдоль его кристаллографической оси (100). Свет из сигнального плеча
интерферометра попадает в фоторефрактивный кристалл вдоль оси (001), где интерферирует.
В объеме фоторефрактивного кристалла происходит интерференционное взаимодействие
приходящих из волоконных световодов волн, которое происходит во взаимно перпендикулярных
направлениях (иначе говоря, векторное). Кристалл титаната бария является кристаллом с
кубической симметрией которая поддерживает анизотропную дифракцию света в своем объеме.
В этой связи в объеме фоторефрактивного кристалла образуется динамическая голограмма,
дифракция света на которой позволяет осуществить линейный режим фазовой демодуляции без
приложения внешнего электрического поля [6]. В этой связи взаимодействие двух
ортогональных световых волн на формируемой ими динамической голографической решетке,
которая создается в объеме фоторефрактивного кристалла, приводит к преобразованию
модуляции фазы сигнальной волны (обусловленной действием акустической волны на
волоконно-оптический приемник) в модуляцию интенсивности, которая далее регистрируется
фотоприемником.
В качестве чувствительных элементов ИНЧ адаптивного лазерного гидрофона были
испытаны два типа датчиков: многовитковый волоконно-оптический датчик акустического поля
на катушке и волоконно-оптический датчик в виде плоской спирали, смонтированный на
поверхности металлизированной мембраны из ПЭТФ.
Волоконно-оптический сенсор ИНЧ акустического сигнала представлял собой
цилиндрическую катушку, сделанную из ПВХ трубы с внутренними распорками: наружный
диаметр трубы был равен 150 мм, и высота цилиндра составляла 170 мм. На цилиндрической
поверхности были нанесены фрезеровкой каналы шириной 1,0 мм и глубиной 0,5 мм. Далее на
цилиндрическую катушку было намотано 23 м очищенного от полимерной защитной оболочки
одномодового оптического волокна, поверх оптического волокна, в нанесенные фрезеровкой
каналы на внешней поверхности трубы, были вставлены штифты из медной проволоки, которые
создали локальные микроизгибные деформации оптического волокна. На штифты были надеты
51
Пленарные доклады
полимерные кольца-стяжки, которые обеспечили равномерную деформацию медными
штифтами оптического волокна в конструкции акустического датчика. Оптическое волокно
оконцовывалось разъемами FC.
Волоконно-оптический датчик мембранного типа представлял собой раму 150×150 мм из
медной проволоки диаметром 3 мм на которую была натянута и проклеена по периметру
металлизированная (Al) пленка из ПЭТФ, толщиной 150 мкм. На металлическую поверхность
пленки была помещена спираль из очищенного от полимерной защитной оболочки
одномодового оптического волокна длиной 23 м. Далее спираль из оптического волокна
фиксировалась на поверхности мембраны в нескольких точках цианакриловым клеем и далее
приклеивалась к поверхности алюминиевой пленки с помощью тонкой пленки из эпоксидной
композиции. Многомодовое оптическое волокно в этом типе датчика также было оконцовано
разъемами FC.
Исследование спектральной чувствительности (снятие АЧХ) волоконно-оптических
датчиков для адаптивного лазерного сейсмографа/гидрофона, а в дальнейшем и испытание
лазерного сейсмографа/гидрофона проводилось в бассейне размером 2,0×2,0×3,0 м, стенки
которого были покрыты звукопоглощающим материалом. Акустический сигнал формировался с
помощью низкочастотного электроакустического преобразователя. Электроакустический
преобразователь ИНЧ и НЧ полосы спектра был сделан на основе толстой полимерной мембраны
и электродинамического привода мощного электромагнита (линейного привода НЧ
акустического динамика). В качестве генератора НЧ и ИНЧ сигнала использовались
управляемый от ПЭВМ перестраиваемый генератор синусоидального сигнала в диапазоне 1,0 Гц
200 Гц и мостовой УМЗЧ собственной разработки. Коэффициент гармоник в электрическом
тракте генератор синусоидального сигнала — УМЗЧ не превышал 0,1 % в полосе частот
2−200 Гц, при выходной электрической мощности сигнала 25 Вт.
Амплитудно-частотные характеристики волоконно-оптических приемников ИНЧ и НЧ
акустических полей приведены на рис. 2.
Чувствительность всех использованных типов волоконно-оптических сенсоров
приведена в табл. 1.
Таблица 1
Тип сенсора
Чувствительность мв/Па
Многовитковый на катушке с металлическими штифтами
Многовитковая спираль на полимерной мембране
9,2
15,4
а
Рис. 2. АЧХ волоконно-оптических сенсоров
а — датчика на катушке; б — датчика на мембране
52
б
Пленарные доклады
Коэффициент преобразования многовиткового сенсора на катушке составлял величину
560 рад/(м/с2), коэффициент преобразования сенсора «многовитковая спираль на мембране»
составляла 718 рад/(м/с2). В свою очередь, имея коэффициент преобразования голографического
интерферометра
1,5 В/рад.
В
этой
связи
общая
чувствительность
лазерного
интерферометрического сейсмографа составляет 840 В/(м/с2) для первого типа первичного
преобразователя акустического ИНЧ поля и 1077 В/(м/с2) для второго типа сенсора. Считая, что
интегральный уровень всех типов шумов, присутствующих в лазерном интерферометрическом
сейсмографе не превышал по амплитуде уровня составляющего 90 мкВ, порог детектирования
ускорения слабых ИНЧ акустических волн составил 130 нВ·м/с2 для первого типа первичного
волоконно-оптического преобразователя. При использовании сенсора «спираль на мембране»
пороговая величина при детектировании ускорения ИНЧ акустических волн составляла
102 нВ·м/с2.
Таким образом в работе показана возможность создания волоконно-оптических датчиков
ИНЧ и НЧ диапазона, а также приведен пример создания адаптивного лазерного
интерферометра, пригодного для работы в качестве сейсмографа, ИНЧ/НЧ гидрофона или
геофона. Измеренный порог детектирования ИНЧ и НЧ сигналов адаптивного лазерного
интерферометра существенно превышает пороги детектирования существующих сейсмографов,
гидрофонов и геофонов, основанных на датчиках МЕМС, емкостных или магнитоэлектрических
первичных преобразователей физических полей.
Литература
1. Lee H. B., Kim Y. H., Park K. S., Eom J. B. Interferometric fiber optic sensor // Sensors. 2012.Vol. 12,
Issue 3. P. 2467−2486.
2. Romashko R. V., Kulchin Y. N., Nipolainen E. Highly sensitive and noise protected adaptive optical
microphone based on a dynamic refractive hologram // Laser Physics. 2014. Vol. 24, Iss. 11. P. 115604−115611.
3. Posada-Roman J., Garsia-Souto J.A., Rubio-Serano J. Fiber optic sensor for acoustic detection of
partial discharges in oil-paper insulated electrical systems // Sensors. 2012. Vol. 12, Iss. 4. P. 4793−4802.
4. Kamenev O. T, Kulchin Y. N., Khishnyak Y. S.,Petrov Y. S., Romashko R. V. Fiber-optic seismometer on
the basic Mach-Zendler interferometer // Sensors and Actuators A. 2016. Vol. 244. P. 133−136.
5. Ромашко Р. В., Кульчин Ю. Н., Ефимов Т. А. Лазерный адаптивный голографический гидрофон //
Квантовая Электроника. 2016. Т. 46, № 3. P. 277−280.
6. Romashko R. V., Girolamo S. D., Kulchin Y. N., Kamshilin A. A. Photorefractive vectorial wave mixing
in different geometrics // Journal Optical Soc. B. 2010. Vol. 27, Iss. 2. P. 311−317.
53
ГИДРОАКУСТИЧЕСКИЕ СИСТЕМЫ
ИССЛЕДОВАНИЕ ВИХРЕВЫХ СТРУКТУР В ЗВУКОВОМ ПОЛЕ МОДЕЛЬНОГО
ВОЛНОВОДА И В БЕРЕГОВОМ КЛИНЕ
Н. В. Злобина, д-р техн. наук, С. Б. Касаткин, канд. физ.-мат. наук
Институт проблем морских технологий им. акад. М. Д. Агеева ДВО РАН, Владивосток, Россия
STUDY OF VORTEX STRUCTURES IN THE SOUND FIELD OF A MODEL
WAVEGUIDE AND IN A SHORE WEDGE
N. V. Zlobina, Dr.Sc., S. B. Kasatkin, Ph.D.
Institute of Marine Technology Problems FEB RAS, Vladivostok, Russia
В работе рассмотрены результаты исследования акустических вихревых полей. В рамках обобщенного
решения граничной задачи Пекериса выполнено модельное описание интерференционных процессов в поле
нормальных волн, приводящее к возникновению вихревых структур. Представлены результаты
моделирования угловой составляющей ротора вектора интенсивности. Выполнено исследование
вихревых структур в мелком море в инфразвуковом диапазоне частот. Модельное описание
знакопеременных вихревых структур хорошо соответствует экспериментальным данным.
The paper discusses the results of a study of acoustic vortex fields. Within the framework of a generalized solution
to the Pekeris boundary problem, a model description of interference processes in the field of normal waves,
leading to the emergence of vortex structures, has been carried out. The results of modeling the angular component
of the intensity vector rotor are presented. A study of vortex structures in shallow sea in the infrasonic frequency
range was carried out. The model description of alternating vortex structures corresponds to experimental data.
Введение. Вихревое поле в звуковом поле точечного источника определяется вихревой
составляющей вектора интенсивности, который в случае волноводных условий становится
сложным вектором, содержащим потенциальную и вихревую составляющие. В свою очередь,
ротор вектора интенсивности является чисто вихревым вектором, а если звуковое поле создается
точечным источником, помещенным в волновод, поле ротора вектора интенсивности становится
осесимметричным и характеризуется только угловой компонентой. Использование векторных
приемников и комбинированных приемников на их основе дает реальную возможность
экспериментального исследования вихревых полей. Наиболее удобным для экспериментального
исследования является поле угловой компоненты ротора вектора интенсивности как чисто
вихревое поле. Вихревое поле имеет различное модельное описание в различных модельных
решениях граничных задач в акустике слоистых сред. Поэтому результаты экспериментальных
исследований угловой компоненты ротора вектора интенсивности могут быть использованы для
верификации модельных решений граничных задач.
Модельное описание вихревых полей в волноводе Пекериса. Простейшее модельное
описание интерференционных процессов в поле нормальных волн, приводящее к возникновению
дислокаций фазового фронта в виде узловых точек, соответствующих минимуму звукового
давления, и седловых точек, соответствующих минимуму модуля вектора интенсивности,
приведено в работах [1, 2]. Формальным признаком появления вихревых структур является
процесс образования интерференционных минимумов звукового давления в суммарном
звуковом поле и возникновение разности фаз между вертикальной и горизонтальной
компонентами вектора колебательной скорости, отличной от нуля или nπ . Наиболее подробно
анализ (в рамках лучевых представлений) пространственной структуры одиночного вихря с
привлечением энергетических соотношений между активной и реактивной составляющими
комплексного вектора интенсивности приведён в работе [2].
54
Гидроакустические системы
Рассмотрим вихревые структуры, возникающие в обобщённом решении задачи Пекериса
на горизонтах трансформации, например, на горизонте источника. В случае обобщённого
решения граничной задачи единицей волнового движения является комбинационная волна (КВ).
Для комбинационных волн вещественного спектра формулы угловой компоненты ротора
вектора интенсивности Hψ имеют вид:
v = − grad ϕ = v1 + iv2 = v e iψ ,
1
H = ωρ1 Im(v × v ∗ ),
2
Hψ = ωρ1 (v1z v2 r − v2 z v1r ) = ωρ1 vr v z sin(ψ z − ψ r ),
где ϕ — потенциал для составляющих дискретного спектра собственных значений оператора,
описывающего граничную задачу; ω — круговая частота; ρ1 — плотность среды волновода.
На рис. 1 приведены в пространственные структуры поля угловой компоненты ротора
вектора интенсивности и поля звукового давления (с исключенной цилиндрической
расходимостью) для второй комбинационной волны для значения нормированного частотного
параметра k1h = 20 для приповерхностного источника. Параметры волновода соответствуют
значениям ρ1 / ρ 2 = 1 / 1,6, c1 / c2 = 1,5 / 1,75 ( c1 , c2 — скорость звука в волноводе и в
полупространстве; ρ 2 — плотность среды полупространства). Основные особенности
пространственных структур представленных звуковых полей заключаются в следующем. В поле
давления интерференция нормальных волн формирует в направлении переноса потока мощности
пространственную структуру, период которой определяется разностной пространственной
частотой. В этой структуре горизонтально ориентированные вихревые цепочки являются
знакопостоянными. Вертикальная структура вихревого поля такова, что на глубине волновода
формируются три знакопеременных вихря размером λ / 4 каждый ( λ — длина волны).
При увеличении частотного параметра будет увеличиваться число КВ в суммарном
звуковом поле, и интерференционная структура поля звукового давления и связанного с ним
вихревого поля станет более сложной. Однако направление вращения вихрей в каждой
горизонтально ориентированной вихревой цепочке будет сохраняться. При объединении КВ в
суммарное звуковое поле возникают новые особенности в поле угловой компоненты ротора
вектора интенсивности. Пространственная структура суммарного звукового поля для трех
комбинационных волн при срединном расположении источника показана на рис. 2.
а
б
2
Рис. 1. Поле угловой компоненты Hψ — а; квадрата звукового давления p для второй
комбинационной волны — б
55
Гидроакустические системы
а
б
Рис. 2. Суммарное поле угловой компоненты Hψ — а;
горизонтальный разрез звукового поля, z1 = 0,4 — б
Вихревые дорожки в общем случае не сохраняют горизонтальную ориентацию, однако
постоянство направления вращения вихрей вдоль дорожки, в основном, сохраняется. Можно,
отметить, что в средней части волновода наблюдается взаимное проникновение вихревых
структур с противоположным направлением вращения вихрей. На рис. 2, б представлен
горизонтальный разрез звукового поля для нормированных значений угловой компоненты вихря
(красный цвет) и модуля звукового давления (синий цвет). Параметры модельного эксперимента
выбраны соответствующими параметрам эксперимента, выполненного в работе [2].
Экспериментальные исследования вихревых структур. Вихревое поле имеет
определенные особенности в инфразвуковом диапазоне частот. Это проявляется в том, что на
проходных характеристиках во всех векторных каналах комбинированного приемника
появляются знакопеременные мелкомасштабные составляющие, которым соответствуют
знакопеременные составляющие вихревого поля с периодом λ / 2 , доминирующие в суммарном
звуковом поле на частотах инфразвукового диапазона [3]. Непосредственные измерения
вихревой составляющей вектора интенсивности и компонент комплексного вектора
интенсивности были также выполнены в работе [2]. Результаты анализа подтверждают
знакопеременный характер вихревого поля. В пространственной структуре вихревого поля
отчетливо выделяются крупномасштабные квазипериодические знакопеременные вихревые
структуры, пространственный период которых определялся разностными пространственными
частотами интерферирующих волн и составлял (8 − 10)λ . Возникновение подобных
крупномасштабных вихревых структур в суммарном звуковом поле, образованном набором
интерферирующих КВ, хорошо соответствует приведенным выше модельным оценкам. Кроме
того, в пространственной структуре вихревого поля присутствуют и мелкомасштабные
знакопеременные вихревые структуры с периодом λ / 2 , отсутствующие в приведенном выше
модельном описании вихревого поля. Такие структуры могут возникнуть только в поле
вытекающих КВ комплексного спектра, которые присутствуют только в обобщенном модельном
решении.
Литература
1. Журавлёв В. А., Кобозев И. К., Кравцов Ю. А. Потоки энергии в окрестности дислокаций
фазового фронта // ЖЭТФ. 1993. Т. 104, № 5(11). С. 3769−3783.
2. Щуров В. А. Фазовый механизм устойчивости вихря вектора акустической интенсивности в
мелком море // Подводные исследования и робототехника. 2022. № 3(41). С. 79−91.
3. Касаткин Б. А., Злобина Н. В., Касаткин С. Б. Обнаружение и идентификация малошумного
движущегося источника на фоне шумов ближнего судоходства в мелком море // Морские
интеллектуальные технологии. 2022. № 3–1(57). С. 205–211.
56
Гидроакустические системы
О ЗАВИСИМОСТИ ЛУЧЕВОЙ СТРУКТУРЫ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА
В АКВАТОРИИ БАРЕНЦЕВА МОРЯ ОТ ВЗАИМНОГО РАСПОЛОЖЕНИЯ
ИСТОЧНИКА СИГНАЛА И ПРИЕМНИКА
М. А. Дубатков, А. В. Епихин, Д. А. Крестовских, А. А. Скорынин, канд. физ.-мат. наук
АО «Корпорация «Комета», Москва, Россия
DEPENDENSE OF THE RAY STRUCTURE OF THE HYDROACOUSTIC SIGNAL
FROM RELATIVE POSITION OF TRANSMITTER AND RECEIVER IN BARENTS SEA
M. A. Dubatkov, A. V. Epikhin, D. A. Krestovskih, A. A. Skorynin, Ph.D.
JSC «Corporation «Kometa», Moscow, Russia
В работе представлены результаты моделирования распространения гидроакустического сигнала в
акватории Баренцева моря на дальность до 300 км. Рассмотрено влияние пространственно-временной
изменчивости характеристик среды на количество энергонесущих лучей, приходящих в приёмник.
There are the results of modeling the propagation of a hydroacoustic signal in the Barents Sea at a range of up to
300 km in this article. The influence of spatial-temporal variability of environmental characteristics on the number
of energy-carrying rays entering the receiver is considered.
Одним из способов повышения дальности действия систем звукоподводной связи может
являться использование априорной информации в алгоритмах обработки многолучевого
сигнала, например, о количестве энергонесущих лучей, приходящих в приемник, с учетом
текущих гидролого-акустических условий (ГАУ) в районе размещения подводных средств.
В системах звукоподводной связи для установления частотно-временной синхронизации началу
передачи информационного блока предшествует передача специального сигнала, структура
которого априори известна на приемной стороне — синхросигнала.
Обнаружение синхросигнала осуществляется в условиях отсутствия апостериорной
информации о его параметрах, в частности о количестве многолучевых компонент. Для поиска
синхросигнала в таких условиях на практике часто применяется алгоритм, основанный на
выделении и сравнении с порогом одного наиболее интенсивного отсчета огибающей колебания
на выходе согласованного фильтра. Данный алгоритм не учитывает многолучевую структуру
сигнала, в связи с чем может не обеспечивать заданных вероятностных характеристик
обнаружения.
Повышение характеристик обнаружения может быть достигнуто за счет использования
при обработке априорной информации о количестве энергонесущих лучей, приходящих в
приемник, с учетом текущих гидролого-акустических условий в районе размещения подводных
средств системы звукоподводной связи. Такая информация позволит выполнить накопление
многолучевых компонент сигнала и тем самым увеличить энергию сигнала, используемую при
обработке.
Настоящая работа содержит анализ влияния ГАУ и взаимного расположения источника и
приемника сигнала на количество многолучевых компонент, приходящих в приемник, в
акватории Баренцева моря.
Метод определения количества энергонесущих лучей. Для определения импульсной
характеристики гидроакустического канала (ИХК) использовался программный комплекс (ПК),
разработанный АО «Корпорация «Комета»» совместно с филиалом «НПЦ ОЭКН» и
реализующий метод решения волнового уравнения в лучевом приближении для однородной по
дальности трассе [1]. Для определения ГАУ использовалась база данных (БД), разработанная на
основе данных по батиметрии [2], ледовой обстановке [3], по вертикальному распределению
скорости звука (ВРСЗ). Скорость звука была рассчитана по формуле Вильсона [7] с
использованием данных по солености и температуре воды [4] и гидростатическому давлению
рассчитанному по формуле Полосина [8]. Коэффициент пространственного затухания в воде
оценивался по формуле Вадова [5].
Грунт считался песчанистым илом с коэффициентом отражения согласно [6].
С применением указанных ПК и БД были рассчитаны ИХК по трассе между источником и
приемником. Диаграммы направленности антенн приемника и передатчика считались
57
Гидроакустические системы
ненаправленным. Канал считался однородным по дальности. Полученные ИХК усреднялись на
временном интервале τ — разрешение приемника. Амплитуды лучей внутри интервала τ
суммировались по формуле:
2
Bk
=
2
∑ Ai cos ϕi + ∑ Ai sin ϕi ,
i
i
(1)
где Bk — амплитуда разрешаемой многолучевой компоненты; Аi и φi — амплитуда и фаза луча,
являющиеся решением волнового уравнения [1].
По
разрешаемым
многолучевым
компонентам
определялось
отношение
сигнал-шум (ОСШ) в каждой точке по трассе по формуле:
=
ОСШ
∑ Bk2 N02 ⋅ ∆f ,
(2)
k
где N0 = 0,001 Па/Гц0,5 на 1 кГц —спектральная плотность шума на выходе антенны приемника;
Δf=120 Гц — ширина полосы частот сигнала.
Поскольку вне зависимости от наличия априорной информации при очень высоком
значении ОСШ прием сигнала будет заведомо обеспечиваться, а при очень низком —
отсутствовать, то из всех точек отбирались только те точки, в которых ОСШ находилось в
диапазоне от –20 до 20 дБ. Количество энергонесущих лучей в каждой из выбранных точек
определялось как количество разрешаемых многолучевых компонент, амплитуда которых
составляет не менее 0,1 от максимального значения в данной точке.
Анализ лучевой структуры. Для анализа пространственной изменчивости ГАУ были
рассмотрены 2 района расположения источника в центральной котловине Баренцева моря с
координатами (75 с.ш. 47 в.д.) и (77 с.ш. 42 в.д.). Для анализа временной изменчивости расчеты
проводились для разных месяцев в году. Излучатель, располагался на глубине 150 м и развивал
акустическое давление 1 кПа на несущей частоте 1,8 кГц.
На рис. 1 представлены зависимости количества энергонесущих лучей от дальности и
глубины расположения приемника для двух районов в зимнее и летнее время.
Рис. 1. Зависимость количества энергонесущих лучей от дальности и глубины
а — район 1 январь; б — район 1 июль; в — район 2 январь; г — район 2 июль;
белым цветом показаны области, в которых ОСШ находится вне диапазона от –20 до 20 дБ
58
Гидроакустические системы
Из результатов видно (рис. 1), что количество энергонесущих лучей сильно подвержено
пространственной изменчивости — оно зависит от глубины расположения приемника, дальности
между приемником и источником, а также района размещения средств. Также оно подвержено
временной изменчивости от сезона года: наименьшее количество лучей наблюдается в зимний
сезон, а наибольшее — в летний.
Из представленных данных видно, что в районе 1 присутствуют области пространства, в
которых количество энергонесущих лучей почти не меняется. В районах с таким ГАУ можно
делать устойчивый прогноз числа лучей. В то же время малое изменение расстояния между
источником и приемником в районе 2 приводит к значительному изменению количества
энергонесущих лучей. Это делает прогноз их количества практически невозможным.
Заключение. В результате проведенного моделирования показано, что число
энергонесущих лучей значительно зависит от ГАУ и взаимного расположения источника и
приемника. Поскольку при выполнении расчетов лучевой структуры гидроакустический канал
считался однородными по дальности, следующим шагом планируется учесть пространственную
изменчивость ВРСЗ на протяженных трассах, а также оценить устойчивость оценок к ошибкам
определения ГАУ.
Литература
1. Матвиенко В. Н. Дальность действия гидроакустических средств. Л., Судостроение, 1976.
2. General Bathymetric Chart of Oceans (GEBCO). Электронный ресурс. URL: https://www.gebco.net/
(дата обращения: 05.04.2021).
3. ФГБУ «Арктический и антарктический научно-исследовательский институт». Электронный
ресурс. URL: http://www.aari.ru/ (дата обращения: 05.04.2021).
4. World Ocean Atlas 2018. Электронный ресурс. URL: https://www.ncei.noaa.gov/products/worldocean-atlas (дата обращения: 05.04.2021).
5. Вадов Р. А. Поглощение и затухание низкочастотного звука в морской среде // Акустический
журнал. 2000. Т. 46, № 5. С. 624.
6. Галкин, О. П., Панкова С. Д. Особенности формирования звукового поля вблизи дна мелкого моря
// Акустический журнал. 2006. Т. 52, № 2. C. 187−194
7. Wilson W. D. Extrapolation of the Equation for the Speed of Sound in Sea Water // J. Acoust. Soc. Am.
1962. Vol. 34, № 6. P. 866.
8. Полосин А. С. Вычисление скорости звука в морской воде // Вестник МГУ, сер. 5. «География».
1967. № 3. С. 101−106.
59
Гидроакустические системы
ВЛИЯНИЕ РАЗВИТОГО ВЕТРОВОГО ВОЛНЕНИЯ НА ЭФФЕКТИВНОСТЬ
ВЕРТИКАЛЬНОЙ АНТЕННЫ В МЕЛКОМ МОРЕ
М. А. Раевский, канд. физ.-мат. наук, В. Г. Бурдуковская
Институт прикладной физики РАН, Нижний Новгород, Россия
THE EFFECT OF DEVELOPED WIND WAVES ON THE EFFECTIVENESS
OF A VERTICAL ANTENNA IN SHALLOW SEAS
M. A. Raevsky, Ph.D., V. G. Burdukovskaya
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Исследуется влияние ветрового волнения на коэффициент усиления вертикальной антенны в мелководных
волноводах. Предложен алгоритм расчета корреляционной матрицы сигнала на апертуре вертикальной
антенной решетки, учитывающий интерференционную структуру поля в звуковом канале. Коэффициент
усиления антенны анализируется для трех методов пространственной обработки: метода ФАР
(фазированной антенной решетки), метода оптимальной линейной обработки и метода оптимальной
квадратичной обработки. Приведены результаты численного моделирования для гидрологических условий
Баренцева моря в зимний период.
The influence of wind waves on the gain of a vertical antenna in shallow-water waveguides is investigated. An
algorithm is proposed for calculating the correlation matrix of the signal at the aperture of a vertical antenna
array, taking into account the interference structure of the field in the sound channel. The antenna gain is analyzed
for three spatial processing methods: phased array antenna method, optimal linear processing method and optimal
quadratic processing method. The results of numerical modeling for the hydrological conditions of the Barents
Sea in winter are presented.
В данной работе мы рассмотрим влияние ветрового волнения на эффективность
пространственной обработки сигнала в мелком море с использованием вертикальной
антенной решетки (АР). Корреляционная матрица сигнала на апертуре антенны
анализируется в приближении многократного рассеяния и с учетом межмодовых
корреляций. В качестве помехи рассматривается океанический шум.
Представим поле точечного источника в виде разложения по ортонормированным
собственным функциям ϕ p ( z ) невозмущенного волновода:
=
p ( r , z, t )
∑
a pϕ p ( z )
p
(
)
exp i k p r − ω0t − π ,
4
k pr
(1)
где ap — амплитуды мод; kp — действительная часть волновых чисел; ω0 — частота излучения;
r — расстояние в горизонтальной плоскости от источника до точки наблюдения. Функция
когерентности поля давления с вертикальным разнесением точек наблюдения имеет вид:
p ( r , z1 , t ) p* ( r , z2 , t )
=
∑ a (r ,t ) a (r ,t )
*
q
p
p ,q
ϕ p ( z1 ) ϕq ( z2 )
k p kq r
exp i ( k p − kq ) r . (2)
В дальнейшем нам потребуется корреляционная матрица сигнала на апертуре
вертикальной АР. Выражение для элементов этой корреляционной матрицы следует из формулы
(2) и с использованием результатов, приведенных в [1], может быть представлено в виде:
{ (
)}
−1
N nm = CmCn* + ∑ ( k p r ) ϕ p ( zm ) ϕ p ( zn ) N p ( r ) − ϕ p2 ( zи ) exp −2 γ p + Im k p r ; (3)
p
60
Гидроакустические системы
=
Cm
)
(
1
∑p ( k p r ) 2 ϕ p ( zи ) ϕ p ( zm ) exp ik p r − γ p + Im k p r ,
−
где zn — глубина элемента антенны с номером «n»; γp — декремент затухания когерентной
компоненты, Imkp обусловлена затуханием в дне. При этом интенсивность мод Np(r)
рассчитывается на основании уравнения переноса [1]:
∂N p ( r )
=
∂r
∑W N ( r ) − 2 (γ + Im k ) N ( r ) .
pp2
p2
p
p
p
(4)
p2
Вероятность перехода между модами W pp2 и декремент γp выражаются через частотный спектр
ветрового волнения.
В качестве помехи рассматривается океанический шум. Наряду с простой моделью
пространственно некоррелированного шума в дальнейшем будет использоваться более
реалистичная модель [2] динамического шума, обусловленного ветровыми приповерхностными
источниками дипольного характера. При этом учитываются эффекты генерации шумового поля,
рассеяния акустических мод на ветровом волнении и затухание в донном грунте. Используя эти
результаты, получим следующее выражение для корреляционной матрицы шума:
Rmn = ∑ k p−1ϕ p ( zm ) ϕ p ( zn ) I p ,
(5)
p
где интенсивность мод шумового поля Ip вычисляется на основании стационарного уравнения
переноса (4), которое также учитывает и эффекты генерации шумового поля.
Перейдем далее к анализу характеристик вертикальной АР в зависимости от выбранного
метода обработки сигнала. Будем считать, что АР состоит из M эквидистантных элементов с
межэлементным расстоянием d равным половине длины волны на частоте f0. Для количественной
оценки эффективности пространственной обработки сигналов выберем коэффициент усиления
антенны G, который определяется как величина выходного отношения сигнал/шум (ОСШ),
отнесенная к величине ОСШ на отдельном приемном элементе. Для сравнения мы рассмотрим
три известных метода пространственной обработки: 1 — стандартный метод ФАР
(соответствующий коэффициент усиления обозначим G0); 2 — метод оптимальной линейной
обработки (коэффициент усиления обозначим G1); 3 — метод оптимальной квадратичной
обработки (коэффициент усиления обозначим G2). При этом для G0 имеем выражение
∑∑ N
∑∑ R
=
G0
m
mn
n
mn
m
n
∑R
.
∑N
⋅ n
nn
(6)
nn
n
Отметим, что формула (6) не предполагает использования какого-либо дополнительного
амплитудно-фазового распределения (АФР) на элементах антенны. Коэффициенты усиления G1
и G2 оптимальной обработки выражаются через собственные значения матрицы S=R-1N, что
соответствует дополнительной операции пространственной декорреляции («выбеливания»)
шума [3]. Соответствующие выражения имеют вид:
−
=
G1
1
2
λi2
∑
λ1
M,
=
M,
G2 i
∑λ
∑λ
i
i
i
i
где λi — собственные значения матрицы S; λ1 — максимальное из них.
61
(7)
Гидроакустические системы
Ввиду сложности задачи конкретные результаты могут быть получены лишь путем
численного моделирования. Приведем в качестве примера результаты численных расчетов
коэффициентов усиления Gi для звукового канала с глубиной H=200 м и слабым положительным
градиентом скорости звука, типичным для Баренцева моря в зимний период. Донные осадки
считаются неконсолидированными с параметрами ρ0 = 2 г/см3, cl = 1800 м/с, коэффициентом
затухания δ = 0.2 дБ/км·Гц. Источник с частотой излучения f = 250 Гц расположен на глубине
zи=100 м и на той же глубине находится центр вертикальной антенны с числом элементов M=25
и межэлементным расстоянием d = 3 м. Расчеты проводились для скорости ветра V=10 м/с и
V=15 м/с, то есть умеренного и сильного ветрового волнения с использованием эмпирического
спектра JONSWAP [4]. Для получения более наглядной зависимости коэффициентов Gi от
дистанции и скорости ветра результаты расчетов сглаживаются по интерференционной
структуре на интервале ∆r =10 км. На рис. 1 приведены соответствующие результаты для двух
значений скорости ветра и двух моделей океанического шума.
Нетрудно видеть, что значения коэффициента усиления АР при оптимальных методах
обработки сигнала (G1 и G2) близки к предельному значению 10lgM=14 дБ, которое
соответствует коэффициенту усиления антенны в свободном пространстве при умеренном
волнении и 2−3 дБ при сильном волнении.
Рис. 1. Сглаженные коэффициенты усиления АР при скорости ветра V=10 м/с (а, б)
и V=15 м/с (в, г) на фоне некоррелированного шума (а, в) и динамического шума (б, г)
62
Гидроакустические системы
Таким образом, применение оптимальных алгоритмов для пространственной обработки на
апертуре вертикальной АР может быть весьма эффективным в задачах обнаружения слабых
сигналов на фоне океанического шума.
Литература
1. Раевский М. А., Бурдуковская В. Г. Влияние межмодовых корреляций на Эффективность
пространственной обработки акустических сигналов в океаническом волноводе со взволнованной
поверхностью // Акуст. журн. 2022. T. 68, № 6. С. 625−637.
2. Раевский М. А., Бурдуковская В. Г. Пространственная обработка акустических сигналов в
океанических волноводах на фоне шумов ветрового происхождения // Акуст. журн. 2023. T. 69, № 1.
С. 73−83.
3. Dennis R. Morgan, Thomas M. Smith Coherence effects on the detection performance of quadratic array
processors, with applications to large-array matched-field // J. Acoust. Soc. Am. 1990. Vol. 87, № 2. P. 737−747.
4. Давидан И. Н., Лопатухин Л. И., Рожков В. А. Ветровое волнение в Мировом океане. Л.:
Гидрометеоиздат, 1985. 256 с.
Исследование выполнено за счет гранта Российского научного фонда № 20-19-00383,
https://rscf.ru/project/20-19-00383/.
63
Гидроакустические системы
ПЕРВИЧНАЯ (ВНУТРИОБЗОРНАЯ) ОБРАБОТКА ИНФОРМАЦИИ
В ГИДРОЛОКАТОРАХ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ.
ПРОБЛЕМЫ И РЕШЕНИЯ
А. А. Войтов, А. Ю. Зилинберг, канд. техн. наук, А. Ю. Корнеев, Ю. А. Корнеев, канд. техн. наук,
Р. К. Хаметов, канд. техн. наук
Кировский филиал АО «Концерн «Океанприбор», г. Кировск, Ленинградская область, Россия
PRIMARY (INTRA-SURVEY) PROCESSING OF INFORMATION IN NEAR-FIELD
OBSERVING SONARS. PROBLEMS AND SOLUTIONS
A. A. Voitov, A. Yu. Zilinberg, Ph.D., A. Yu. Korneyev, Yu. A. Korneyev, Ph.D., R. K. Hametov, Ph.D.
Kirovsk branch of JSC «Concern «Oceanpribor», Kirovsk, Leningrad region, Russia
Применительно к гидролокаторам с высокой разрешающей способностью по координатам
(гидролокаторы освещения ближней обстановки) рассматриваются основные проблемы, возникающие
при автоматической внутриобзорной (первичная обработка) обработке обнаруживаемых и
сопровождаемых объектов. Проводится анализ особенностей характеристик сигналов, рассеянных
объектами разных классов. Формулируются предложения, позволяющие повысить эффективность
обработки ГЛ-информации на этапе обнаружения объектов и измерения их координат.
In relation to sonars with high coordinate resolution (near-field sonars), the main problems that arise during
automatic intra-survey (primary processing) processing of detected and tracked objects are considered. An
analysis of the characteristics of signals scattered by objects of different classes is carried out. Proposals are
formulated to improve the efficiency of processing sonar information at the stage of detecting objects and
measuring their coordinates.
Введение. Для вновь проектируемых гидролокаторов освещения ближней обстановки
(ГЛ ОБО) характерной чертой является существенное повышение уровня автоматизации
обрабатываемой информации.
Основные проблемы, возникающие при разработке высокоавтоматизированных ГЛ ОБО,
обусловлены следующими причинами:
− нестационарностью характеристик реверберационных помех (что характерно для
донной и поверхностной реверберации), большим динамическим диапазоном обрабатываемых
сигналов, изменчивостью характеристик помех в зоне обзора;
− априорной неопределенностью модулирующих функций (МФ) интенсивности помех,
неопределенностью и изменчивостью законов распределения помех и их параметров;
− априорной неопределенностью пространственных размеров, формы и ориентации
обнаруживаемых объектов и навигационных препятствий.
Проблемы априорной неопределенности характеристик помех и нестационарности
сигнально-помеховой обстановки приводят при обнаружении объектов к большим вариациям
ложных тревог, неустойчивости работы алгоритмов трассового анализа, особенностям при
реализации алгоритмов измерения координат целей с разными геометрическими размерами.
Особенности ГЛ-сигналов, отраженных объектами разных классов. Объекты,
обнаруживаемые и идентифицируемые (классифицируемые) при работе ГЛ ОБО, имеют
существенно отличающиеся пространственные характеристики и структурные особенности.
Классы обнаруживаемых объектов и помех можно разделить на 4 группы.
Кл.1. Малые объекты, близкие к точечным по сравнению с размерами элемента
разрешения ГЛ ОБО по координатам, например, — швартовая бочка, якорная мина.
Кл.2. Подводная лодка (ПЛ). Кл.3. Надводный корабль (НК).
Для объектов этих классов отражения формируются как от корпуса судна, так и от
«спутного» следа (шлейфа), образуемого движущимся судном.
Кл.4. Реверберационные помехи. Эти помехи в свою очередь подразделяются на
поверхностную, объемную и донную реверберацию.
Поверхностная реверберация обусловлена волнением водной поверхности.
Объемная реверберация обусловлена присутствием в водной толще пузырьков воздуха,
мелкими ракообразными, стаями (косяками) рыб.
64
Гидроакустические системы
Донная реверберация формируется неровностями рельефа дна и различными донными
отложениями. «Пересеченность» рельефа дна, разная степень заилистости приводит к
неоднородности (нестационарности) отражений от дна.
Состав и структура алгоритмов обработки ГЛ-информации в ГЛ ОБО. Предлагаемая
к рассмотрению блок-схема взаимосвязи реализуемых в ГЛ ОБО алгоритмов обработки
приведены на рис. 1 [1, 2].
Дадим комментарии по составу и особенностям реализации алгоритмов обработки в
структурной схеме ГЛ ОБО, представленной на рис.1
Алгоритмы автоматического обнаружения и визуализации отметок [2]. 1) Алгоритм
формирования решающей статистики при реализации процедуры обнаружения целей имеет ряд
особенностей:
а) размеры обнаруживаемых объектов варьируются в широких пределах: от 1 до 5-х
элементов пространственного разрешения (ЭР) для точечных объектов (ТО), 5…50 элементов
разрешения — для локально-протяженных объектов (ЛПрО), более 50…80 ЭР — протяженные
объекты (ПрО),
б) характеристики реверберационных помех в окрестностях обнаруживаемых объектов
априорно неизвестны и могут быть нестационарными.
Формирование статистики обнаружения Уоб(i,j), где i, j — номера дискрет по дальности и
курсовому углу, проводится с использованием модифицированного критерия отношения
правдоподобия (МОКОП-критерий) [3] и реализуется блоками 2…7 на рис. 1 [1, 2].
2) Для согласования большого динамического диапазона (60 дБ и более) исходного ГЛИ с
малым динамическим диапазоном системы отображения (блок 11 на рис. 1), составляющим
20…25 дБ, применены процедуры центрирования (блок 4) и нормирования (блок 5) массива
исходного ГЛИ У(i,j)).
3) Для обеспечения устойчивости процедур оценок параметров положения и разброса
распределения фоновых отражений (блоки 2 и 3 на рис. 1) к наличию на интервалах оценивания
дискретных помех большой интенсивности используются два подхода:
а) применяется процедура «категоризации» (блок 1 на рис. 2) отсчетов обучающей
выборки, состоящая в предварительном обнаружении аномальных выбросов и их замещении на
интерполированные отсчеты, соответствующие гладким фоновым отражениям (т.е. в этом
случае реализуется процедура цензурирования отсчетов ГЛ-изображения с замещением
аномальных выбросов),
б) применяются алгоритмы оценивания параметров положения и разброса распределения
отсчетов ГЛ-изображения, устойчивые к засорению апертуры фильтра-оценщика аномальными
выбросами (блоки 2 и 3 на рис. 1). К таким процедурам относятся алгоритмы нелинейной
фильтрации и оценивания, в частности, медианной фильтрации [1, 2].
Структура адаптивно-непараметрических обнаружителей. Структура обнаружителя,
показанная на рис. 2, технически реализует алгоритмы, обозначенные блоками 2…7 на рис. 1.
А именно: в них реализуется устойчивое оценивание полей параметров положения (среднего) и
размаха (СКО) при наличии засоряющих аномальных выбросов (бл.1 рис. 2), а также устойчивое
оценивание поля заданного квантиля СFлт стационаризованного по среднему и СКО ГЛИ
(бл.9 рис. 2). Блок-схема на рис. 2 реализует оценивание поля параметра положения с помощью
процедуры предварительного обнаружения и замещения аномальных наблюдений (бл.1 рис. 2).
Использование алгоритма категоризации соответствует реализации робастной процедуры
оценивания полей параметра положения и параметра размаха.
Рассмотрим подробнее структуру обнаружителя.
В блоке категоризации (бл.1 на рис. 2) реализуется процедура предварительного
обнаружения аномальных выбросов (которыми являются выбросы от объектов-целей, береговой
черты, донных неоднородностей и т.п.).
Выходом бл.1 является поле данных, подвергнутых процедуре категоризации, т.е.
формируется поле {Yк(i, j)}, не содержащее аномальных наблюдений. На выходе фильтраоценщика (бл.2) формируется оценка параметра положения (в частном случае, скользящего
среднего mкy(i, j)).
65
Гидроакустические системы
Рис1. Укрупненная блок-схема: взаимосвязи алгоритмов обработки ГЛ ОБО
ИДП — идентификационные признаки отметки (вектор); блок 9 — блок формирования и обработки виртуального
ГЛ-изображения; блок 7 — многопороговая сегментация; используется для формирования компонент ИДП отметок
Рис. 2. Адаптивно-непараметрический обнаружитель сигналов с категоризацией данных
γоб(i, j) — решения об обнаружении выбросов на выходе порогового устройства;
γБСВ(i, j) — решения об обнаружении шумовых выбросов на выходе блока БСВ; ЛЗ — линия задержки
Оценка поля размаха флюктуаций (в частном случае поля СКО /бл.3, рис. 2/) может быть
реализована разными способами: либо непосредственно как оценка СКО, либо с использованием
скользящего среднего модуля второй конечной разности (МВКР) «категоризованного» поля
{Yк(i, j)}, т.е. |Δ2iYк(i, j)|. Оценка среднего модуля вторых конечных разностей по своей сути
близка к оценке СКО, но его алгоритмическая реализация заметно проще.
При обработке ГЛ-изображений (двумерных полей данных) рационально использовать
двумерные фильтры, например фильтры с конечными импульсными характеристиками по
дальности и азимуту (курсовому углу). Выход бл.3 — это оценка СКО (или МВКР) σкy(i, j),
которая поступает на блок формирования порога категоризации Пкат (бл.4). Порог Пкат по
величине существенно меньше основного порога обнаружения Побн(i, j) и определяется
вероятностью ложной категоризации Fктг, которая существенно больше вероятности ложной
тревоги Fлт.
66
Гидроакустические системы
Типичные значения этих вероятностей: Fлт = 10-3…10-5, Fктг = 2•10-1…10-2.
На рис. 2 в бл.5 выполняется процедура центрирования, результатом которой является
центрированное поле данных {Yц(i, j)}, а в блоке 6 реализуется процедура нормирования
центрированного поля на параметр размаха. В результате формируется поле {Yцн(i, j)},
стационаризованное по параметру положения {mкy(i, j)} и параметру размаха {σкy(i, j)}, поэтому
порог обнаружителя формируется как оценка поля квантиля {CFлт(i, j)}, соответствующего
заданной вероятности ложной тревоги Fлт.
Рассмотрим функционирование на рис. 2 замкнутой петли, формирующей оценку квантиля
СFлт(i, j), (блоки 8 и 9 на рис. 2). Оценка данного квантиля формируется блоком структурной
селекции выбросов (БСВ — бл.8) и регулятором порога обнаружения (РПО — бл.9). Для
обнаружителя, показанного на рис. 2, оценка квантиля СFлт(i, j) является порогом обнаружения.
Алгоритм работы БСВ соответствует реализации процедуры структурного анализа
аномальных выбросов и использования только шумовых выбросов для регулировки порога
обнаружения [2]. Устойчивость формирования оценки квантиля СFлт(i, j) обеспечивается
предварительным цензурированием в БСВ выбросов, которые не являются шумовыми, а
непараметрическая регулировка (оценка) поля квантиля {СFлт(i, j)} шумовых выбросов
выполняется блоком РПО.
Заключение. В докладе представлены результаты разработки, экспериментальной
апробации и исследованию алгоритмов первичной обработки ГЛ-информации [детали смотри в
1, 2]. Исследования проводились на статистических ситуационных моделях, а также с
использованием полунатурного моделирования и в ходе натурных и сдаточных испытаний ГЛ
ОБО. Проведенные натурные испытания выявили ряд вопросов, касающихся моделей
обрабатываемых сигналов, которые уточнялись авторами в ходе детального анализа
особенностей и условий применения разработанных алгоритмов.
Литература
1. Устройство сегментации локационного изображения. Патент РФ № 2219562 от 20.12.2003 г.
Казаков Б. М., Войтов А. А., Корнеев Ю. А., Мяльк Р. А., Антохин Е. А.
2. Помехозащищенный обнаружитель сигналов обзорного гидролокатора. Заявка на патент
№2013152376 от 26.11.2013 г. Войтов А. А., Казаков Б. М., Корнеев А. Ю., Корнеев Ю. А., Хаметов Р. К.
3. Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной неопределенности и
адаптация информационных систем. М., Советское радио, 1977. 432 с.
67
Гидроакустические системы
ВТОРИЧНАЯ (МЕЖОБЗОРНАЯ) ОБРАБОТКА ИНФОРМАЦИИ
В ГИДРОЛОКАТОРАХ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ.
ПРОБЛЕМЫ И РЕШЕНИЯ
А. А. Войтов, А. Ю. Зилинберг, канд. техн. наук, А. Ю. Корнеев, Ю. А. Корнеев, канд. техн. наук,
Р. К. Хаметов, канд. техн. наук
Кировский филиал АО «Концерн «Океанприбор», г. Кировск, Ленинградская область, Россия
SECONDARY (INTER-SURVEY) INFORMATION PROCESSING IN NEAR-FIELD
OBSERVING SONARS. PROBLEMS AND SOLUTIONS
A. A. Voitov, A. Yu. Zilinberg, Ph.D., A. Yu. Korneyev, Yu. A. Korneyev, Ph.D., R. K. Hametov, Ph.D.
Kirovsk branch of JSC «Concern «Oceanpribor», Kirovsk, Leningrad region, Russia
Применительно к гидролокаторам с высокой разрешающей способностью по координатам
(гидролокаторы освещения ближней обстановки - ГЛ ОБО) рассматриваются основные проблемы,
возникающие при автоматической межобзорной (вторичной) обработке обнаруживаемых и
сопровождаемых объектов. Проводится анализ особенностей алгоритмов вторичной обработки.
Формулируются предложения, позволяющие повысить эффективность обработки ГЛ-информации на
этапе сопровождения объектов
In relation to sonars with high coordinate resolution (near-field sonars), the main problems that arise during
automatic inter-survey (secondary) processing of detected and tracked objects are outlined. An analysis of the
various stages of secondary processing is carried out. Proposals have been formulated to improve the efficiency
of processing sonar information at the stage of object tracking.
Введение. В статье [1] применительно к гидролокаторам освещения ближней подводной
обстановки (ГЛ ОБО) рассмотрены вопросы реализации перспективных алгоритмов
автоматической обработки ГЛ-информации. Данная статья является тематическим
продолжением статьи [1]. Алгоритмы обработки (рис. 1 в статье [1]) включают в себя как
алгоритмы первичной внутриобзорной последетекторной обработки ГЛ-информации —
обнаружение, измерение координат отметок, формирование идентификационных признаков
отметок, так и алгоритмы вторичной межобзорной обработки, реализующие автоматический
захват и сопровождение отметок.
Для обеспечения надежности алгоритмов автоматического захвата и сопровождения
объектов в многоцелевых ситуациях применены алгоритмы анализа и классификации отметок, а
также алгоритмы межобзорного отождествления отметок по набору идентификационных
признаков, формируемых на этапе первичной внутриобзорной обработки ГЛ-информации и при
обработке параметризованного «виртуального» ГЛ-изображения.
Особенности
алгоритмов
автозахвата
и
сопровождения.
Проведенные
предварительные натурные эксперименты, анализ условий работы алгоритмов обнаружения и
автоматического захвата отметок на сопровождение показали, что традиционный координатный
алгоритм сопровождения отметок [2] в сложных помехо-целевых обстановках, многоцелевых
ситуациях должен быть дополнен алгоритмом ассоциирования отметок с трассами по
идентификационным признакам (ИДП) отметок. В вектор ИДП каждой отметки входят
следующие параметры: а) размеры проекций следов отметок на оси координат; б) максимальная
и средняя амплитуды отметки; в) площади следов отметок на порогах сегментации; г) объемы
отметки над порогами сегментации; д) отношение С/Ш отметки; е) структурные характеристики
отметки, обеспечивающие параметризацию выброса.
При реализации алгоритмов автозахвата и сопровождения отметок применяется алгоритм
ассоциирования отметок с трассами с использованием вектора ИДП. Ассоциирование отметки с
трассой производится путем сравнения метрик нескольких отметок, попавших в строб захвата
или сопровождения, с опорным ИДП трассы. Ассоциируется с трассой та отметка, метрика
которой является минимальной. При этом метрика не должна превышать порога
ассоциирования. Мерой сходства отметок с трассами, т.е. с отметками предыдущих циклов, уже
ассоциированных с трассой, является метрика, формируемая из компонент вектора ИДП
текущей отметки и компонент опорного вектора ИДП. Опорный вектор ИДП формируется
68
Гидроакустические системы
осреднением на скользящем окне (5…6 циклов зондирования) компонент векторов ИДП
отметок, ассоциированных с трассой.
Metr1b = ∑
j
ИДП (i, j, k i , s ) − ИДП асс (i - 1, j, s )
ИДП асс (i - 1, j, s )
.
(1)
В выражении (1) приняты обозначения: i — номер обзора; ki — номер отметки в стробе на i-ом
обзоре; s — номер строба, j-я компонента вектора ИДП. ИДП (i, j, ki, s) — j-я компонента вектора
ИДП ki отметки на i-ом обзоре в s-ом стробе, ИДПасс(i-1, j, s) — j-я компонента вектора ИДП на
(i-1)-ом обзоре для отметки, ассоциированной с s-ой трассой.
Ниже на рис. 1 приведен фрагмент алгоритма вторичной обработки ГЛ-информации,
включающий этапы завязки, подтверждения и сопровождения отметок.
На рис. 2 поясняется структура алгоритма ассоциирования отметок с трассами,
использующего идентификационные признаки отметок и оценки их средних значений.
На рис. 3 показана трасса сопровождаемого объекта на 24-м и 25-м циклах. На рис. 3
приведено сегментированное на порогах h1, h2, h3 ГЛ-изображение и стробы сопровождения.
Рис. 1. Фрагмент алгоритма вторичной обработки ГЛ-информации
(завязка, подтверждение и сопровождение отметок)
69
Гидроакустические системы
Рис. 2. Пояснение алгоритма ассоциирования отметок с трассами,
использующего идентификационные признаки отметок
а
б
Рис. 3. Трасса объекта (фрагмент); показано сегментированное
на порогах h1, h2, h3 ГЛ-изображение и стробы сопровождения
а — сопровождение объекта, 24-ый цикл; б — сопровождение объекта, 25-ый цикл
70
Гидроакустические системы
Рис. 4. Графики последовательностей компонент ИДП (обозначены сверху клеток)
сопровождаемой отметки, снятые на трассе длиной в 80 циклов
На рис. 4 представлены зависимости компонент вектора ИДП сопровождаемого объекта от
номера цикла. В состав компонент вектора ИДП, описывающего особенности каждой отметки,
входили: максимальная и средняя по следу отметки амплитуда, площади сечений отметки на
трех порогах сегментации, объемы отметки над порогами сегментации, максимальные и средние
сечения следа отметки по дальности и курсовому углу, протяженность следа отметки по
дальности и курсовому углу. На рис. 4 в 8-ой и 9-ой клетках объединенных графиков (снизу —
в центре и справа) приведены зависимости метрики и порога ассоциирования отметки с трассой
от номера цикла.
Заключение
1. Применительно к гидролокаторам освещения ближней подводной обстановки в
настоящей статье и в статье [1] рассмотрены вопросы реализации перспективных алгоритмов
первичной и вторичной обработки ГЛ-информации.
2. Алгоритмы включают как внутриобзорную последетекторную обработку
ГЛ-информации — обнаружение и измерение координат отметок, формирование
идентификационных признаков отметок, формирование массива ГЛ-изображения для
отображения, так и алгоритмы межобзорной обработки, обеспечивающие автоматический захват
и сопровождение отметок.
3. При реализации алгоритмов адаптивного обнаружения для обеспечения устойчивости
процедур оценивания параметров полей фоновых отражений применены робастные алгоритмы,
позволяющие существенно снизить влияние на формируемые оценки параметров ГЛИ
аномальных выбросов, присутствующих в обрабатываемых массивах отсчетов ГЛ-изображения.
4. Для обеспечения надежности алгоритмов автоматического захвата и сопровождения
объектов в многоцелевых ситуациях применены алгоритмы анализа и классификации отметок, а
также алгоритмы межобзорного отождествления отметок в стробах сопровождения по набору
идентификационных признаков, формируемых на этапе первичной внутриобзорной обработки
ГЛ-информации и при обработке параметризованного «виртуального» ГЛ-изображения отметок,
попавших в строб сопровождения.
71
Гидроакустические системы
5. Применение идентификационных признаков позволило повысить эффективность
автозахвата и сопровождения трасс при наличии в зоне обзора множественных дискретных
помех, в многоцелевых ситуациях, а также уменьшить вероятность «перепутывания» трасс,
попадающих в стробы сопровождения.
Литература
1. Войтов А. А., Зилинберг А. Ю., Корнеев А. Ю., Корнеев Ю. А., Хаметов Р. К. Первичная (внутриобзорная) обработка информации в гидролокаторах освещения ближней обстановки. Проблемы и решения // Тр. Всерос. конф. «Прикладные технологии гидроакустики и гидрофизики». 2023. В печати.
2. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей / Пер. с англ. М.: Радио и связь, 1993. 320с.
72
Гидроакустические системы
ОЦЕНКА ЗОН ОБНАРУЖЕНИЯ ИНТЕГРИРОВАННОЙ ВЕРТОЛЕТНОЙ
ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ HELRAS ПРИ РАБОТЕ В АКТИВНЫХ
МОНОСТАТИЧЕСКОМ, БИСТАТИЧЕСКОМ И МУЛЬТИСТАТИЧЕСКОМ
РЕЖИМАХ
Б. Ю. Иванов, Г. К. Михайлов, канд. техн. наук
НИИ кораблестроения и вооружения ВМФ ВУНЦ ВМФ «ВМА», Санкт-Петербург, Россия
ASSESSMENT OF DETECTION ZONES OF THE INTEGRATED HELRAS
HELICOPTER SONAR SYSTEM WHEN OPERATING IN ACTIVE MONOSTATIC,
BISTATIC AND MULTISTATIC MODES
B. Yu. Ivanov, G. K. Mikhailov, Ph.D.
Research Institute of Shipbuilding and Armament of Navy «Naval Academy», St. Petersburg, Russia
Перспективным направлением в развитии вертолетных гидроакустических средств поиска является
интеграция в единую гидроакустическую систему опускаемого гидроакустического модуля и
радиогидроакустических буев с единой бортовой аппаратурой обработки и отображения информации,
обеспечивающей возможность их применения в моностатическом, бистатическом и
мультистатическом режимах работы. Статья посвящена оценке зависимости зон обнаружения
гидроакустических
систем
от
интервалов
расстановки
вертолётов
и
постановки
радиогидроакустических буёв.
A promising direction in the development of helicopter hydroacoustic search facilities is the integration into a
single hydroacoustic system of a lowered hydroacoustic module and radio hydroacoustic buoys with a single onboard information processing and display equipment, providing the possibility of their use in monostatic, bistatic
and multistatic operating modes. The article is devoted to the assessment of the dependence of the detection zones
of hydroacoustic systems on the intervals of helicopter positioning and radio hydroacoustic buoys.
Развитие вертолётных низкочастотных гидроакустических систем поиска подводных
лодок (пл) HELRAS ВМС Великобритании соответствует общемировой тенденции объединения
отдельных средств поиска в интегрированную низкочастотную гидроакустическую систему (ГС)
с единой бортовой аппаратурой (БА) обработки и отображения информации от опускаемого
гидроакустического модуля (ОГАМ) и низкочастотных радиогидроакустических буев (РГБ)
различного типа [1, 2]. Благодаря совместному функционированию и взаимодействию
низкочастотного ОГАМ и пассивных РГБ различных типов улучшаются возможности по
обнаружению подводных лодок. В данной статье приведены возможности ГС при совместной
работе ОГАМ с ОГАМ других вертолётов или РГБ.
Исследования бистатических режимов работы вертолетной ГС HELRAS при работе
с ОГАМ и при совместной работе с РГБ. ГС HELRAS имеет следующие характеристики [2]:
8-ми элементная излучающая антенна высотой 5,2 м, рабочая глубина до 500 м, 3 рабочие
частоты — 1,311; 1,380 и 1,449 кГц, уровень излучения 218 дБ отн. 1 мкПа, приемная антенна
диаметром 2,6 м и высотой 1,2 м.
Для оценки зоны обнаружения (ЗО) принято, что энергетическая дальность обнаружения
цели с эквивалентным радиусом 10 м в моностатическом режиме составляет 15 км, при
вероятности правильного обнаружения — 0,9 и ложной тревоги за цикл обзора — 0,1.
Оценка ЗО ГС выполнялась по методике мультистатических гидроакустических систем с
использованием лучевой акустической модели звукового поля, использующей модель слоистонеоднородной среды, применительно к району Чёрного моря [3−5], для зимних и летних условий
при заглублении ОГАМ на 300 м; глубина антенн буёв — 300 м, глубина пл — 300 м.
На рис. 1 представлены зависимости площадей ЗО ГС от интервалов расстановки
вертолетов с ОГАМ и постановки РГБ в бистатическом режиме работы в условиях зимнего и
летнего времени.
73
Гидроакустические системы
а
б
Рис. 1. Зависимости площади ЗО ГС от интервала расстановки вертолётов с ОГАМ
и постановки РГБ в бистатических режимах работы
а — бистатический режим работы ОГАМ; б — бистатический режим работы ОГАМ и РГБ DIFAR
Как видно из рис. 1 величины ЗО ГС зимой превосходят ЗО ГС летом, что определяется
гидрологическими условиями. Максимальная дальность обнаружения в данном режиме
составляет: 24 и 18 км (режим «ОГАМ»), 22 и 14 км (режим «ОГАМ+DIFAR»). В бистатическом
режиме отсутствует рост площади ЗО ГС от интервала расстановки вертолетов и постановки
РГБ, что обусловлено одновременным ростом площади мертвой зоны, т.е. этот режим
малоэффективен в данных условиях. Обеспечение роста площади ЗО ГС возможно в
бистатическом режиме при другой тактической схеме с работой ОГАМ в моностатическом
режиме, но это не классический бистатический режим, и он здесь не рассматривается.
Исследования мультистатических режимов работы вертолетной ГС с ОГАМ и РГБ.
На рис. 2 приведены оценки зависимости площадей ЗО ГС от интервалов расстановки вертолетов
и постановки РГБ в мультистатических режимах работы зимой и летом.
Как следует из рис. 2 оптимальные интервалы расстановки вертолетов и постановки РГБ в
мультистатических режимах ГС составляют: 30 км зимой и 25 км летом в режиме «ОГАМ»; 20 км
зимой и 17 км летом в режиме «ОГАМ+DIFAR». Величина ЗО ГС зимой по сравнению с летом
при оптимальном интервале расстановки вертолетов в режиме «ОГАМ» больше в 1,8 раза.
Величина дальности обнаружения при оптимальном интервале расстановки, оцененная в
приближении моностатики, летом и зимой составляет: 33 и 24 км в режиме «ОГАМ»; 31 и 19 км
в режиме «ОГАМ+DIFAR», соответственно. Величины оптимальных ЗО ГС по сравнению с
моностатическим режимом увеличиваются в 1,9 раза.
a
б
Рис. 2. Зависимости площади ЗО ГС от интервала расстановки вертолётов с ОГАМ
и постановки РГБ в мультистатических режимах работы
а — мультистатический режим работы ОГАМ; б — мультстатический режим ОГАМ И РГБ DIFAR
74
Гидроакустические системы
Исходя из вышеизложенного, использование в вертолетных ГС HELRAS
мультистатического режима при поиске пл является наиболее целесообразным.
Выводы. В настоящей статье представлены оценки зон обнаружения пл вертолётной
гидроакустической системы HELRAS при работе в активном моностатическом, бистатическом и
мультистатическом режимах применительно к условиям Чёрного моря зимой и летом.
Приведённые результаты позволяют оценить оптимальную расстановку вертолетов и интервалы
постановки пассивных радиогидроакустических буёв с учётом гидрологических условий в
моностатических, бистатических и мультистатических режимах работы перспективной
низкочастотной авиационной гидроакустической системы.
Полученные данные могут быть использованы в качестве предварительных оценок при
планировании испытаний перспективных ГС вертолётов морской авиации ВМФ.
Литература
1. Military Technology. 2021. Vol. 45, Iss. 2. P. 37−39.
2. HELRAS DS-100 Helicopter Long-Range Active Sonar, L-3 Oceans Group, October 30, 2007.
3. Колесниченко В. В., Свектунова И. А., Школьников И.С., Шутов А. Л. Вопросы точности
определения координат и параметров движения цели в режимах моно и мультистатической активной
гидролокации // Гидроакустика. 2013. № 17 (1).
4. Козловский С. В., Сергеев В. А. Методика оценки информационной эффективности
мультистатических систем гидролокации // Экология и развитие общества. 2016. № 3(18).
5. Методика расчета зон обнаружения корабельных мультистатических ГАС. СПб.: НИЦ РЭВ и
ФИР НИИ ОСИС ВМФ ВУНЦ ВМФ «ВМА», 2017.
75
Гидроакустические системы
ПРОСТРАНСТВЕННАЯ ЛОКАЛИЗАЦИЯ ИСТОЧНИКА ШУМОИЗЛУЧЕНИЯ
МЕТОДОМ КОНСОЛИДИРОВАНННОЙ ОБРАБОТКИ СИГНАЛА
А. Д. Консон, д-р техн. наук, А. А. Волкова, канд. техн. наук
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
SPATIAL LOCALIZATION OF NOISE SOURCE USING CONSOLIDATED SIGNAL
PROCESSING METHOD
А. D. Konson, Dr.Sc, А. А. Volkova, Ph.D.
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Рассмотрен метод пространственной локализации источника шумового широкополосного сигнала в
океане с использованием вертикально развитой многоэлементной антенны. Предлагаемый метод
обеспечивает когерентное сложение всех лучей, пришедших на апертуру антенны в вертикальной
плоскости. Данный метод назван «методом консолидированной обработки сигнала». В работе с
использованием компьютерного моделирования исследована потенциальная возможность метода.
A method of spatial localization of broadband noise signal source in the ocean using vertical multielement antenna
is considered. The offered method provides coherent combining of all beams arrived to antenna aperture in
vertical plane. This method is called «method of the consolidated processing of a signal». Potentiality of the
method is studied using computer modeling.
Введение. В океанической акустике при использовании средств шумопеленгования
большое распространение получают методы обработки сигналов, учитывающие особенности
формирования акустического поля в неоднородной среде. (Matched-Field Processing — MFP).
К настоящему времени согласованную со средой обработку используют, прежде всего, для
решения задачи оценки расстояния и глубины погружения объекта излучения. Известные
MFP-алгоритмы объединяет то, что в них предлагается измерять интерференционную картину
на апертуре приемной вертикально развитой антенны. Следует отметить, что такие алгоритмы
теряют эффективность при малом входном отношении сигнал/помеха, поскольку они, прежде
всего, основаны на измерении параметров сигнала на элементах антенны.
Рассмотрим альтернативный метод пространственной локализации источника шумового
широкополосного сигнала в океане с использованием вертикально развитой многоэлементной
антенны. Предлагаемый новый метод основан на процедуре когерентного сложения сигналов
всех лучей, пришедших на апертуру антенны. Учитывая характерную особенность предлагаемой
процедуры, которая обеспечивает когерентное сложение всех лучей, пришедших на апертуру
антенны, данный метод авторами назван «методом консолидированной обработки сигнала» от
лат. consolidatus = объединить в одно тело.
Процедура, реализующая метод консолидированной обработки сигнала, состоит из двух
этапов: 1) настройка приемной системы; 2) работа приемной системы.
Настройка приемной системы. Настройка приемной системы осуществляется с
использованием результатов компьютерного моделирования акустического поля для заданных
гидролого-акустических условий и состоит из следующих процедур:
− формирование совокупности гипотез о расстоянии до объекта и глубине погружения
объекта в виде двумерной координатной сетки «расстояние–глубина»;
− моделирование акустического поля на каждом из элементов вертикальной антенны для
шумового сигнала, как если бы он распространялся от каждого из узлов сетки; Моделирование
акустического поля осуществляют в частотной полосе и с частотой дискретизации приемного
тракта;
− вычисление взаимно-корреляционной функции (ВКФ) сигнала для каждого элемента
антенны относительно одного элемента антенны, выбранного опорным, по всему набору узлов
координатной сетки;
− для всех элементов антенны по каждому из узлов координатной сетки определяют
локальные максимумы в каждой из взаимно-корреляционных функций с определением их
абсцисс, то есть дискретных задержек сигнала.
76
Гидроакустические системы
Рис. 1. Схема получения дискретных задержек на элементах антенны при настройке приемной системы
Рис. 2. Схема работы приемной системы
Пояснение процедур настройки приемной системы приведено на рис. 1, где
обозначено: АНТЕННА — вертикальная антенна, состоящая из совокупности элементов от 1 до
n; ВКФ (1-1), ВКФ (i-1), ВКФ (n-1) — взаимно корреляционные функции для модельного
сигнала, принятого на элементы антенны относительно опорного. В примере элемент антенны с
номером 1 принят в качестве опорного; τ — наборы дискретных задержек для элементов
антенны.
В результате настройки приемной системы каждый элемент антенны приобретает свой
набор дискретных задержек для каждого из узлов координатной сетки.
Работа приемной системы. Работа приемной системы состоит из следующих процедур,
повторяющихся для каждого из узлов координатной сетки «расстояние–глубина»: 1) прием
шумового сигнала на каждый элемент вертикальной антенны; 2) получение на каждом элементе
антенны совокупности копий сигнала, сдвинутых каждая на свою задержку из набора
дискретных задержек для этого элемента (наборы задержек сформированы при настройке
приемной системы); 3) суммирование сдвинутых копий сигнала на каждом элементе и получение
их выходных сигналов; 4) суммирование выходных сигналов по всем элементам антенны;
5) квадратичное детектирование; 6) суммирование сигнала после детектирования на выбранном
интервале накопления по времени; 7) индикация.
Схема работы приемной системы приведена на рис. 2, где обозначено: Στ — блок
суммирования сдвинутых копий сигнала на отдельном элементе антенны при использовании
77
Гидроакустические системы
набора дискретных задержек для этого элемента; Σn — блок суммирования сигналов по всем
элементам антенны; D2 — квадратичный детектор; Σt — блок суммирования по
времени; «расстояние–глубина» — индикатор для выбранной координатной сетки. Остальные
обозначения аналогичны обозначениям для рис. 1.
В результате работы приемной системы в каждой точке координатной сетки «расстояниеглубина» имеем численное значение мощности сигнала, согласованное с предполагаемым
положением источника. Отображение мощности сигнала в виде яркостного растра позволяет
оценить расстояние до источника и глубину его погружения.
Определение расстояния и глубины в различных гидролого-акустических условиях.
Компьютерное моделирование в различных гидролого-акустических условиях проведено с
помощью лучевой программы на основе плоскослоистой модели среды с ровным дном.
В качестве гидролого-акустических условий выбраны условия: подводного звукового канала
(ПЗК) (Черное море, лето) и приповерхностного звукового канала (ППЗК) (Черное море, зима).
В качестве приемника звука рассмотрена протяженная дискретная вертикальная антенна
высотой 200 м, состоящая из 41 ненаправленного приемного элемента с шагом 5 м между ними.
Антенна фиксировалась на глубине от 550 до 750 м.
При моделировании использовалась сетка гипотез о координатах источника: по
расстоянию от 0,5 до 100 км с дискретным шагом 0,5 км; по глубине от 10 до 200 м с дискретным
шагом 10 м. Сигнал от источника моделировался как шумовой сигнал в виде отрезка
нормального белого шума в диапазоне частот до 2,0 кГц.
а
в
б
Рис. 3.
г
а — ВРСЗ для условий ПЗК; б — ВРСЗ для условий ППЗК; в — результат консолидированной обработки
сигнала в условиях ПЗК; г — результат консолидированной обработки сигнала в условиях ППЗК
78
Гидроакустические системы
На рис. 3 приведены отдельные результаты для двух типов ВРСЗ в виде совокупности
растров (откликов алгоритма) в координатах «расстояние-глубина» при глубине погружения
источника 100 м для истинных положений источника по дальности от 5 до 95 км. Модельные
эксперименты для всех условий дали устойчиво схожие результаты, по которым можно принять
достоверное решение о пространственном положении источника.
79
Гидроакустические системы
АЛГОРИТМ ВЫБОРА РЕЖИМА ГИДРОЛОКАЦИИ ПРИЁМО-ПЕРЕДАЮЩИХ
ГАС В МНОГОПОЗИЦИОННОЙ СИСТЕМЕ ПОДВОДНОГО НАБЛЮДЕНИЯ
(МСПН) ПРИ КОНТРОЛЕ АКВАТОРИИ
В. Н. Митин, Ю. Е. Терехов, канд. физ.-мат. наук, С. Э. Григас, канд. физ.-мат. наук
AO «Корпорация «Комета», Москва, Россия
MODE SELECTION ALGORITHM FOR ACTIVE TRANSCEIVER SENSORS
OF MULTISTATIC SONAR NETWORK
V. N. Mitin, Yu. E. Terekhov, Ph.D., S. E. Grigas, Ph.D.
JSC «Corporation «Kometa», Moscow, Russia
Рассматривается многопозиционная система подводного наблюдения (МСПН) с множеством
гидроакустических станций (ГАС), поочередно излучающих сигналы для контроля акватории. Каждая
ГАС может работать либо в моностатическом режиме гидролокации — излучать и принимать эхосигналы, либо в мультистатическом режиме — только принимать эхо-сигналы от излучений других ГАС.
Приведён алгоритм выбора режима работы для каждой ГАС МСПН, основанный на регулировании
интервалов приёма сигналов ГАС. Алгоритм позволяет сократить время создания поля обнаружения по
сравнению со случаем использования только режима моностатической гидролокации ГАС.
We study a multistatic sonar network (MSN) consisting of dozens of active sonobuoys for region control. Each
sonobuoy can operate either in monostatic scheme — emitting signals and receiving echoes caused by signals or
in multistatic scheme — receiving echoes caused by emission from another sonobuoy. We propose an algorithm
to reduce creation time of continuous detection area for the whole region. The algorithm assigns operation mode
for each sonobuoy as well as precise receiving time intervals.
В настоящее время в качестве перспективных средств контроля объектовой обстановки
акваторий Мирового океана рассматриваются многопозиционные системы подводного
наблюдения (МСПН) [1−2]. Такие системы основаны на использовании пространственнораспределённых активно-пассивных гидроакустических станций (ГАС) с пересекающимися
зонами обзора.
Применение шумопеленгования для обнаружения современных подводных объектов
существенно ограничено, поэтому основными режимами работы ГАС являются режимы
активной моностатической гидролокации (ГЛ) и мультистатической гидролокации (МГЛ).
В режиме ГЛ ГАС излучают и принимают эхо-сигналы, а в режиме МГЛ — только принимают
эхо-сигналы от излучений других ГАС. Приём эхо-сигналов в каждом из активных режимов
работы ГАС осуществляется в течение ограниченного интервала приёма. Чем больше
длительность интервала приёма сигнала, тем с большей площади данная ГАС принимает эхосигналы.
В результате каждая ГАС создаёт собственное поле обнаружения при работе в каждом из
активных режимов, геометрическая форма которого определяется режимом работы ГАС. Поле
обнаружения в режиме ГЛ в условиях однородного района представляют из себя набор
концентрических колец. Поля обнаружения в режиме МГЛ аппроксимируются овалами
Кассини [3].
Простейшим способом организации согласованной работы множества ГАС,
исключающим влияние акустических помех [4] для создания поля обнаружения является
организация поочерёдного излучения зондирующих сигналов ГАС.
При этом ГАС могут осуществлять приёмы эхо-сигналов с максимальными интервалами
приёма. В результате совокупное поле обнаружения ГАС будет иметь максимальную площадь
со множественными перекрытиям индивидуальных полей ГАС. В таком случае вероятность
обнаружения объектов будет высокой, однако создание такого поля занимает значительное
время. С увеличением времени создания поля увеличивается и расстояние, на которое объект
поиска может продвинуться внутрь контролируемой акватории, оставаясь при этом
незамеченным.
Для уменьшения времени, затрачиваемого на создание поля обнаружения по площади
акватории, можно использовать только часть станций. Однако в таком случае, за счёт
80
Гидроакустические системы
уменьшения перекрытий индивидуальных полей ГАС уменьшается и вероятность обнаружения
объектов в контролируемой акватории.
Вероятность обнаружения объектов в контролируемой акватории может быть повышена
за счёт перевода части ГАС в режим МГЛ. Повышение вероятности обнаружения достигается за
счёт перекрытия индивидуальных полей обнаружения ГАС и обеспечения возможности
совместного обнаружения одного объекта с использованием одной излучающей и нескольких
принимающих эхо-сигналы ГАС. Возможность совместного использования режимов ГЛ и МГЛ
для множества ГАС создаёт проблему выбора количества и номеров ГАС, работающих в каждом
из режимов при создании поля обнаружения, а также номеров ГАС, не использующихся при
создании поля.
В данной работе предложен алгоритм, позволяющий выбирать номера и количество ГАС,
работающих в режимах ГЛ и МГЛ для создания поля обнаружения. Оптимизируемым
параметром алгоритма является время создания поля обнаружения в ограниченной площади при
условии того, что создаваемое поле будет сплошным, т.е. таким, что любая точка внутри
ограниченной площади лежит внутри поля обнаружения хотя бы одной ГАС, а вероятность
обнаружения объекта в данной точке больше некоторого заранее заданного порогового значения.
Предложенный алгоритм состоит из трёх шагов. На первом шаге каждой ГАС 𝑖𝑖 временно
назначается режим ГЛ с максимальным интервалом приёма сигналов 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 . Площадь
контролируемой акватории 𝑆𝑆 разбивается на элементарные ячейки 𝑥𝑥 такие, что размер каждой
ячейки 𝑥𝑥 значительно меньше размера 𝑆𝑆. Выполняется подсчёт количества 𝑝𝑝 ячеек 𝑥𝑥,
покрываемых полем хотя бы одной ГАС. Считается, что ячейка 𝑥𝑥 покрывается полем хотя бы
одной ГАС 𝑖𝑖, если любая точка внутри ячейки 𝑥𝑥 принадлежит полю ГАС 𝑖𝑖.
Инициализируется цикл по всем ГАС 𝑖𝑖. Для каждой ГАС 𝑖𝑖 определяется список номеров
ближайших к ней ГАС 𝑛𝑛. Для номеров 𝑛𝑛 последовательно выполняется проверка возможности
перевода ГАС с номером 𝑖𝑖 в режим МГЛ между ГАС 𝑖𝑖 и 𝑛𝑛. Для ГАС с номерами 𝑖𝑖 и 𝑛𝑛
определяются геометрические параметры поля МГЛ (где 𝑛𝑛 — излучатель, а 𝑖𝑖 — приёмник эхосигнала). Выполняется перерасчёт количества 𝑝𝑝′ покрываемых ячеек 𝑥𝑥 и сравнение 𝑝𝑝′ и 𝑝𝑝 в
случае замены поля ГЛ станции 𝑖𝑖 на поле МГЛ. Если 𝑝𝑝′ ≥ 𝑝𝑝, то режим работы ГАС 𝑖𝑖 меняется с
ГЛ на МГЛ с образованием пары 𝑛𝑛 − 𝑖𝑖 «излучатель-приёмник сигнала». При этом для ГАС 𝑖𝑖
выбирается максимальный интервал приёма сигнала. По окончанию цикла для каждой ГАС
назначен режим ГЛ или МГЛ с максимальными интервалами приёма сигналов 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 .
На третьем шаге алгоритма выполняется уменьшение интервалов приёма сигналов ГАС.
Инициализируется цикл по всем ГАС 𝑖𝑖. Для ГАС 𝑖𝑖 инициализируется цикл от 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 до нуля с
малым шагом ℎ. Выполняется уменьшение интервала приёма сигнала 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 на значение ℎ и
перерасчёт размера поля обнаружения ГАС 𝑖𝑖 для интервала приёма 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 − ℎ. Выполняется
проверка количества 𝑝𝑝′′ покрываемых ячеек 𝑥𝑥 и сравнение 𝑝𝑝′′ и 𝑝𝑝. Если 𝑝𝑝′′ ≥ 𝑝𝑝, то ГАС с
номером 𝑖𝑖 присваивается новый интервал приёма, равный 𝑡𝑡 = 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 − ℎ. Процесс итерационно
повторяется.
Если значение интервала приёма 𝑡𝑡 в результате уменьшения достигло нуля, то отмена
излучения (или приёма сигнала) ГАС 𝑖𝑖 не приводит к уменьшению количества покрываемых
ячеек 𝑝𝑝. ГАС с номером 𝑖𝑖 в таком случае не будет излучать или принимать сигналы. Тем самым
выполняется уменьшение количества ГАС, необходимых для освещения контролируемой
акватории.
Алгоритм протестирован для МСПН, состоящей из 96 ГАС, расположенных на расстоянии
20 км друг от друга. Контролируемая акватория имеет размер 180×260 км. Район является
однородным по параметрам среды, а все ГАС используют один сигнал, излучаемый с одной
мощностью. Проведено два компьютерных моделирования, приведённых на рис. 1. В первом
моделировании (рис. 1, а) для создания поля обнаружения использовалось несколько ГАС,
работающих в режиме ГЛ. Во втором (рис. 1, б) часть ГАС работала в режиме ГЛ, а другая
часть — в режиме МГЛ.
И в первом, и во втором моделировании создаётся поле обнаружения в контролируемой
акватории. В первом моделировании поле обнаружения создаётся за 48 минут с помощью
18 ГАС, работающих в режиме ГЛ. Во втором — поле создаётся за 20 минут с помощью 12 ГАС,
работающих в режиме МГЛ, и 17 ГАС в режиме ГЛ.
81
Гидроакустические системы
а
б
Рис. 1. Результаты моделирования процесса создания поля обнаружения
а — ГАС используют только ГЛ; б — ГАС используют ГЛ и МГЛ; круглым маркером указаны ГАС,
работающие в ГЛ, знаком «+» – ГАС, работающие в МГЛ; точками показаны ГАС, не использующиеся для создания
поля обнаружения; окраска пикселей на картах соответствует шкале вероятности обнаружения объектов
Представленный алгоритм, основанный на решении геометрической задачи покрытия,
позволяет существенно снизить время создания сплошного поля обнаружения совокупности
ГАС без решения задачи выбора типов сигналов для каждой ГАС и мощностей их излучения.
Для рассмотренного в данной работе примера время создания поля обнаружения было
уменьшено более чем в два раза.
Дальнейшее сокращение времени создания поля обнаружения совокупности ГАС может
быть достигнуто решением задачи выбора типов сигналов и мощностей их излучения для каждой
ГАС, а также формированием непрерывного расписания излучений ГАС, учитывающего
взаимные акустические помехи.
Литература
1. Пешехонов В. Г., Брага Ю. А., Машошин А. И. Сетецентрический подход к решению проблемы
освещения подводной обстановки в Арктике // Известия Южного федерального университета.
Технические науки. 2012. Т. 128, № 3. С. 219−227.
2. Liu Z., Jin Х., Xie Y., Yang Y. Joint Slot Scheduling and Power Allocation in Clustered Underwater
Acoustic Sensor Networks // Journal of automatic sinica. 2023. Vol. 10, № 6, P. 1501−1503.
3. Avcioglu A., Bereketli A., Bay O. F. Three Dimensional Volume Coverage in Multistatic Sonar Sensor
Networks // IEEE Access. 2022. Vol. 10. P. 560−578.
4. Стребкова А. А., Терехов Ю. Е., Динамическое формирование расписания излучения сигналов
при решении задачи поиска подводных объектов многопозиционной системой подводного наблюдения в
ограниченной акватории // Тр. Всерос.й конф. «Прикладные технологии гидроакустики и гидрофизики».
СПб.: ЛЕМА, 2023. C. 155−158.
5. Дубровский А. Ю., Покровский А. А, Сергеев В. А. Подход к обоснованию параметров
гидролокаторов при их функционировании в составе многопозиционной системы // Тр. Всерос. конф.
«Прикладные технологии гидроакустики и гидрофизики». СПб.: ЛЕМА, 2023. C. 138−142.
82
Гидроакустические системы
МНОГОДИАПАЗОННЫЙ МАЛОГАБАРИТНЫЙ ГИДРОАКУСТИЧЕСКИЙ
ПЕЛЕНГАТОР
И. Н. Дынин1, В. З. Кранц1, Д. Б. Островский1,2, д-р техн. наук
1
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
2
СПб государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
MULTIRANGE SMALL-SIZE HYDROACOUSTIC DIRECTION FINDER
I. N. Dynin1, V. Z. Krants1, D. B. Ostrovskiy1,2, Dr.Sc.
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
St. Petersburg State Electrotechnical University «LETI», St. Petersburg, Russia
Рассмотрен принцип построения многодиапазонного гидроакустического пеленгатора, в котором в
каждом частотном диапазоне на базе цилиндрической звукопрозрачной многоэлементной антенны
формируется веер пространственных каналов (ПК), имеющих диаграммы направленности типа
«обратная кардиоида». Определены условия, ограничивающие число формируемых ПК, необходимое
количество и топология размещения приемников в антенне. Приведены упрощенные структурные схемы
пеленгатора.
Principle of the multirange hydroacoustic direction finder is considered. Antenna of finder is multielement,
cylindrical sound-transparent. In every frequency range fan-shaped of space channel (SC) with the directivity
patterns of the “return cardioid” forms. The conditions, which are limiting the quantity of SC, quantity and
arrangement of receivers in antenna are determined. Simplified structured schemes of finder are reduced.
Вопросы, связанные с построением малогабаритного гидроакустического пеленгатора,
рассмотрены, в частности, в [1, 2]. При этом показано, что определение направления на источник
сигнала осуществляется с помощью веера направленных приемных пространственных каналов
(ПК), сформированных на базе цилиндрической звукопрозрачной антенны, по окружности
которой размещены N гидроакустических приемников (ГАП). Такое решение позволяет
осуществлять одновременный обзор пространства в рабочем секторе 360° (в горизонтальной
плоскости). Каждый ПК имеет диаграмму направленности (ДН) типа «обратная кардиоида»
(ДНОК), сформированную с использованием двух ГАП, разнесенных друг от друга на
расстояние l = λ/4, где λ = с/f — длина волны принимаемого сигнала (с — скорость звука,
f — частота сигнала). Одна пара ГАП может быть использована для формирования двух
ориентированных в противоположных направлениях ПК.
Тракт формирования содержит устройства задержки сигналов, принимаемых каждым
ГАП, на время tз = T/4, где T = 1/f — период частоты f, сумматоры, ограничители по минимуму,
а также усилители с АРУ. На выходах сумматоров формируются кардиоидные ДН, которые
=
R(θ) | cos[45(1 + cos θ)] | , а на выходах ограничителей
могут быть представлены соотношением
функция R(θ) ограничивается по минимуму величиной Rмин. Сигналы с выходов ограничителей
являются управляющими для усилителей с АРУ, коэффициенты передачи которых обратно
пропорциональны уровням управляющих сигналов. При этом зависимость уровней сигналов на
выходах усилителей с АРУ от угла θ может быть записана как Rок(θ) = 1/Rк(θ). т.е. представляет
собой ДНОК.
В [2] показано, что используя N=2m (m ≥ 1 — целое число) ГАП, можно построить веер из
M=N ПК, а при N=2m+1 — веер из M=2N ПК. В любом случае в сформированном веере
содержится четное число ПК.
На рис. 1 в качестве примера показан веер ДНОК, соответствующий числу M ПК.
Горизонтальные площадки показанных на рис. 1 ДНОК, имеющие угловой размер Δθок,
определяемый соотношением Δθок=360°/M, являются результатом введения в тракт
формирования процедуры ограничения по минимуму. Величину Δθок можно считать шириной
ДНОК, в отличие от величины Δθ07, характеризующей ширину классической ДН, измеренную на
уровне −3 дБ относительно максимального значения.
83
Гидроакустические системы
Рис. 1.
а
Рис. 2.
б
Значение Δθок однозначно определяется уровнем Rмин [2], который не может быть
произвольно малой величиной, поскольку в кардиоидной ДН значения уровня, близкие к
нулевым, отсутствуют из-за наличия, в частности, аддитивной помехи. Это обстоятельство
ограничивает количество ПК, которое может быть реализовано в рассматриваемом пеленгаторе,
и, соответственно, число ГАП, используемых при их формировании.
Из сказанного следует:
1. Для уменьшения значения Δθок путем увеличения числа ПК в веере, например, с целью
повышения точности пеленгования, необходимо увеличивать количество ГАП в антенне, что
усложняет ее конструкцию.
2. При уменьшении числа ПК и соответствующем увеличении значения Δθок, необходимая
точность пеленгования может быть обеспечена, как показано в [1, 3], путем сопоставления
уровней сигналов в ПК, смежных (слева и справа) с ПК, ориентированным в направлении на
пеленгуемый источник сигнала. Для этого число ПК в веере должно быть не менее трех, но
поскольку, как отмечалось ранее, оно является четным, то значение М≥4. Соответствующие
соотношения иллюстрируются табл. 1.
В соответствии с табл. 1, наиболее экономичными с точки зрения реализации можно
считать пеленгаторы, антенны которых содержат N = 3 или N = 4 ГАП. В первом случае ГАП
размещены в вершинах равностороннего треугольника, вписанного в окружность диаметром
D3 = λ/(4cos30°), при этом сторона треугольника равна λ/4 (рис. 2, а). Во втором случае ГАП
размещены на концах взаимно перпендикулярных диаметров окружности, длина которых равна
D4 = λ/4 (рис. 2, б). Общим недостатком рассмотренных пеленгаторов является относительно
малая ширина рабочего частотного диапазона кардиоидной ДН.
Таблица 1
Rмин
Δθок, град.
Mпк
Mгап
0,003
10
36
36
0,038
36
10
5
0,105
60
6
3
0,228
90
4
4
Как показано в [4], значение частоты fс принимаемого сигнала должно быть в пределах
(0,8–1,2)fср, где fср= c/λ. В противном случае в формируемой ДН возникают провалы и
дополнительные максимумы в ложных направлениях.
Для устранения этого недостатка необходимо требуемый рабочий диапазон разбить на Q
поддиапазонов и использовать дополнительные ГАП, располагая их таким образом, чтобы
линейное расстояние между ГАП, составляющими рабочую пару для n-го поддиапазона (1≤n≤Q),
было равно ln. При этом в каждом n-ом поддиапазоне используется свой набор ГАП, размещенных
на окружностях соответствующего диаметра Dn, обеспечивающий в данном диапазоне
формирование веера ПК и определение пеленга θист на источник сигнала, а общее количество ГАП
возрастает в Q раз.
84
Гидроакустические системы
а
Рис. 4.
б
Рис. 3.
В табл. 2 в качестве примера для Q=8 приведены значения ln, средней fср, нижней граничной
fн и верхней граничной fв частот, а также значения D3, соответствующие N=3, для каждого частотного
поддиапазона (при N=4 D4=ln). Как видно из табл. 2, в рассматриваемом примере рабочий
частотный диапазон пеленгатора занимает полосу от 0,8 кГц до 20,5 кГц.
Таблица 2
ЧДn
fн, кГц
fв, кГц
fср, кГц
ln, см
D3, см
1
0,8
1,2
1
37,5
43,3
2
1,2
1,8
1,5
25,0
28,87
3
1,8
2,7
2,25
16,67
19,25
4
2,7
4,05
3,375
11,11
12,83
5
4,05
6,075
5,063
7,407
8,55
6
6,075
9,112
7,594
4,99
5,76
7
9,113
13,669
11,391
3,29
3,8
8
13,669
20,503
17,086
2,19
2,53
Для работы в n-ом частотном диапазоне (ЧД) используется отдельный формирователь
веера ПК с отдельной диапазонной антенной диаметром Dn, содержащей N приемников. Таким
образом, общее количество диапазонных антенн в пеленгаторе равно Q, а число ГАП — NQ.
Конструктивно антенна Q-диапазонного пеленгатора может представлять собой
плоскость, в которой находятся все QN приемников. При этом центры всех диапазонных антенн
могут быть размещены либо в одной точке, что в качестве примера для Q=3 и N=3 показано на
рис. 3, а, либо смещены, как показано на рис. 3, б. Во втором случае, если один ГАП используется
во всех Q поддиапазонах, общее количество ГАП может быть уменьшено на Q −1.
Другой вариант построения антенны — это Q-слойная усеченная пирамида, нижнее
основание которой имеет диаметр D1, а верхнее — DQ.
Для функционирования рассмотренного многодиапазонного пеленгатора в его состав
необходимо ввести приемный тракт с ненаправленной антенной, обеспечивающий измерение
частоты входного сигнала и определение номера n поддиапазона, которому соответствует
измеренная частота. Работа такого пеленгатора иллюстрируется структурной схемой на рис. 4, где
показаны Q систем определения пеленга (СОП) θист, каждая из которых работает в n-ом
поддиапазоне. Значения пеленга с выходов СОП передаются на входы нормально закрытых ключей,
имеющих необходимый номер. Открытие необходимого ключа осуществляется сигналом
управления, поступающим из системы определения номера частотного диапазона (СОН ЧД).
Литература
1. Кранц В. З., Островский Д. Б. Малогабаритный пеленгатор гидроакустических сигналов / Тр. Всерос.
конф. «Прикладные технологии гидроакустики и гидрофизики». СПб.: изд. «ЛЕМА», 2023. С. 129−132.
2. Кранц В. З., Островский Д. Б. Об использовании кардиоидных диаграмм направленности для
пеленгования гидроакустических сигналов // Гидроакустика. 2022. Вып. 51(3). С. 5−11.
3. Патент РФ № 2810696, МПК G01S3/80, публ. 28.12.2023.
4. Смарышев М. Д. Элементы теории направленности гидроакустических антенн. СПб.: изд-во
СПбГЭТУ «ЛЭТИ», 2003. С. 56−60.
85
Гидроакустические системы
КВАЗИОПТИМАЛЬНЫЙ АЛГОРИТМ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ
МНОГОБЛИКОВЫХ ОТРАЖАТЕЛЕЙ В МНОГОЛУЧЕВОМ ВОЛНОВОДЕ
В. Н. Драченко1, канд. техн. наук, Г. Н. Кузнецов1, канд. физ.-мат. наук,
А. Н. Михнюк2, канд. физ.-мат. наук
1
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
2
Российский университет дружбы народов, Москва, Россия
QUASI-OPTIMAL ALGORITHM FOR DETECTING SMALL-SIZED
MULTI-REFLECTIVE REFLECTORS IN A MULTIBEAM WAVEGUIDE
V. N. Drachenko1, Ph.D., G. N. Kuznetsov1, Ph.D., A. N. Mikhnyuk2, Ph.D.
1
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
2
Peoples' Friendship University of Russia, Moscow, Russia
Выполнено исследование увеличения вероятности обнаружения эхосигналов на фоне помех при
использовании квазиоптимального алгоритма, учитывающего многолучевую модель волновода и
многобликовость отражателя. Обоснована возможность увеличения дальности обнаружения при
использовании временного интервала, в течение которого наблюдается последовательность сигналов,
отраженных от одной цели. Показано, что в результате накопления мощности с использованием
квазиоптимального алгоритма, частично учитывающего модель передаточной функции и модель
отражателя, уменьшаются ложные тревоги и увеличивается дальность сопровождения цели.
A study was carried out to increase the probability of detecting echo-signals against a background of interference
using a quasi-optimal algorithm that takes into account the multi-beam model of the waveguide and the multiglare reflector. The possibility of increasing the detection range by using a time interval during which a sequence
of signals reflected from one target is observed is substantiated. It is shown that as a result of power accumulation
using a quasi-optimal algorithm, which partially takes into account the transfer function model and the reflector
model, false alarms are reduced and the target tracking range is increased.
В различных организациях выполняется разработка быстро развертываемых
гидролокационных станций (ГЛС) обнаружения малоразмерных тел, в том числе пловцов на
ластах или средствах движения, автономных необитаемых подводных аппаратов (АНПА) и
безэкипажных катеров (БЭК). Их назначение — охрана важных районов в прибрежных зонах и
защита промышленных, хозяйственных или военных объектов со стороны прилегающей
акватории. При разработке алгоритма будем учитывать, что при работе гидролокатора в
реальном волноводе эхосигналы, отраженные от обнаруживаемой цели, приходят на приемную
антенну в виде совокупности лучей, структура которых определяется акустикогидрологическими условиями в акватории и типом отражателя, точные модели которых в
реальных условиях не известны. Как следствие, оптимальная согласованная обработка
невозможна и рекомендуется использовать квазиоптимальные алгоритмы, частично
учитывающие модели сигнала и отражателя — такие «загрубленные» алгоритмы более
устойчивы к изменению характеристик эхосигналов и помех и не требуют детального знания
передаточной функции волновода. Рассмотрим результаты применения макета малогабаритной
ГЛС, обеспечивающей в шельфовой зоне освещение подводной обстановки и обнаружение целей
в активном режиме. В макете используются: а) излучающая антенна в виде линейной
вертикальной антенны, формирующей направленное в вертикальной плоскости и
ненаправленное излучение в горизонтальной плоскости, и б) приемная антенна —
цилиндрическая многоканальная, формирующая в горизонтальной плоскости веер стационарных
характеристик направленности, одновременно принимающих эхосигналы со всех
горизонтальных направлений. Совокупная вертикальная и горизонтальная направленность
обеспечивают непрерывное обнаружение, пеленгование и сопровождение целей во всей зоне
обзора. Фотографии 1 станций «Тритон-64» и «Тритон-128» приведены на рис. 1. Диапазон
рабочих частот 60−90 кГц, диаметры излучателя 2 см, приемных антенн — 21 и 32 см, высота
антенн — излучающих 20 см, приемных — 10 см.
1
На 3-м международном форуме «Морская индустрия России» ИОФРАН за гидроакустические модули «Тритон» был награжден
золотой медалью в номинации «Научные исследования и изыскания».
86
Гидроакустические системы
а
б
Рис. 1. Фотографии ГЛС, включающих вертикальную излучающую антенну
и цилиндрическую многоканальную приемную антенну
а — «Тритон-64»; б — «Тритон-128»
Обработку принимаемых сигналов и помех разобьем на предварительную, первичную и
вторичную. К предварительной обработке относят аналоговую фильтрацию и усиление
принятых сигналов, аналого-цифровое преобразование и цифровую фильтрацию с децимацией.
При первичной обработке выполняется формирование характеристик направленности,
фильтрация, согласованная с формой зондирующего сигнала, и обнаружение первичных отметок
целей. Вторичная обработка включает траекторную фильтрацию и классификацию
обнаруженного объекта.
Для первичной обработки используем известный алгоритм Бартлетта с формированием в
горизонтальной плоскости веера характеристик направленности. На выходе пространственных
каналов устанавливаем динамические пороги для выделения пиков (отраженных сигналов),
превышающих заданный порог. В результате при стандартной обработке учитываются только
наиболее энергонесущие лучи, дающие максимальный отклик. Но полная энергия отраженного
сигнала не используется.
Ниже предлагается вариант частично согласованной обработки, учитывающей интервалы
возможных задержек сигналов по лучам, а из характеристик цели — пространственное
разнесение отдельных отражателей. Для отработки алгоритма в контролируемых условиях
исследуем эхосигналы при известном числе отражателей.
На рис. 2 показаны отрезки индикаторного процесса (ИП) в стационарном угловом канале
приемной антенны, полученные при движении на удаление простейшего имитатора цели —
стандартного уголкового отражателя с длиной ребра 10 см. Учитывая простую конструкцию
имитатора и что в каждом направлении формируется единственная отражающая эхосигналы
зона, можно утверждать, что на этом рис. 2 пакет сигнальных пиков сформирован не
многобликовостью, а многолучевостью.
а
б
в
Рис. 2. Отрезки индикаторного процесса в «угловом» канале, уголковый отражатель
87
Гидроакустические системы
а
б
в
Рис. 3. Отрезки индикаторного процесса в угловом канале для АНПА длиной 3 м
а
б
в
Рис. 4. Значения ОСП сигналов от отражателя при разном накоплении мощности
а
б
Рис. 5. Траектории движения отражателя на выходе алгоритмов обнаружения
одиночных импульсов (а) и с квазиоптимальным накоплением (б)
На рис. 3 приведены отрезки ИП в угловом канале, полученные от более сложного
отражателя — автономного необитаемого подводного аппарата (АНПА), движущегося под
углом около 40−45 градусов к направлению на источник эхосигналов.
Видно, что количество пиков и расстояния между ними существенно увеличились, что
приводит к увеличению общего числа отражений и энергии эхосигналов. На рис. 4, а, б
приведены результаты использования предлагаемого частично согласованного алгоритма при
обработке реальных записей с приемной антенны ГЛС от АНПА (кривые 1). Представлены
значения отношения сигнал/помеха (ОСП) обнаруженных отметок, идентифицированных как
отметки отраженных от цели эхосигналов и отнесенных к соответствующей траектории, от
номера цикла локации (времени) в трех разных экспериментах с АНПА, рис. 4, а, б, и с
уголковым отражателем, рис. 4, в.
На рис. 4 графики 1 получены при протяжке и последовательном обнаружении
эхосигналов и рассчитаны по квазиоптимальному алгоритму, а графики 2 — по одиночным
максимальным откликам. Видно, что при квазиоптимальном алгоритме ОСП возрастает, а зона
пропусков цели уменьшается. Пример реализации алгоритма обработки результатов с учетом
траекторного анализа и метода накопления мощности эхосигналов приведен на рис. 5, на
котором в полярной системе координат представлены фотографии с экрана индикатора
траектории движения отражателя. Применение квазиоптимального алгоритма позволяет более
устойчиво обнаруживать отражатель — без потери контакта и с увеличением дальности
сопровождения.
88
Гидроакустические системы
Для реализации квазиоптимального алгоритма вначале устанавливается «заниженный»
порог обнаружения, с использованием которого обнаруживаются множественные ложные
тревоги, в том числе несколько дополнительных «пиков» — эхосигналов, отраженных от цели.
Объединение нескольких эхосигналов на выбранном интервале расстояний (временном
интервале) и их суммирование позволяет при сличении с «завышенным порогом» повысить
вероятность правильного обнаружения и подавить ложные тревоги. Для корректного выбора
временного интервала нужно на основании имеющихся характеристик волновода выполнить
прогнозные расчеты интервалов задержек эхо-лучей для простого отражателя и расширить его
на величину ∆tL, которая определяется предполагаемыми размерами обнаруживаемых объектов
и вероятным направлением их движения.
89
Гидроакустические системы
ЛИНИИ РАВНЫХ ФАЗ И ФАЗОВЫЙ ИНВАРИАНТ
В ЧАСТОТНО-ПРОСТРАНСТВЕННОЙ ОБЛАСТИ ЗВУКОВОГО ПОЛЯ
В МЕЛКОМ МОРЕ
Г. Н. Кузнецов, канд. физ.-мат. наук, А. Н. Степанов, д-р физ.-мат. наук
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
LINES OF EQUAL PHASES AND PHASE INVARIANT
IN THE FREQUENCY-SPATIAL DOMAIN OF THE SOUND FIELD
IN A SHALLOW SEA
G. N. Kuznetsov, Ph.D., A. N. Stepanov, Dr.Sc.
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
Впервые обсуждается существование линий равных фаз в частотно-пространственной области в
направлении от источника к приемнику. Получено дифференциальное уравнение для их расчета в
волноводе и показано, что такие линии связаны с фазовым инвариантом (ФИ), аналогичным известному
волноводному инварианту Чупрова (ИЧ), но имеющему иной физический смысл и характеристики: они
рассчитываются на фазовой плоскости, а не на поле интенсивности. Эти линии постоянной фазы
устойчивы, слабо зависят от условий распространения и позволяют путем накопления (суммирования)
синфазных сигналов вдоль линии равных фаз выполнять помехоустойчивую обработку слабых сигналов
для их обнаружения и оценки параметров.
For the first time, the existence of lines of equal phases in the spatial-frequency region is discussed, a differential
equation is obtained for their calculation in a waveguide, and it is shown that such lines are associated with a
phase invariant (PI), similar to the well-known waveguide Chuprov invariant (CH), but having a different physical
meaning: they are calculated on the phase plane rather than using the intensity field. These constant-phase lines
are stable, weakly affected by propagation conditions, and allow optimized signal processing for detection in the
presence of interference.
В регулярных волноводах любой физической природы наблюдается интерференция
когерентных сигналов, пришедших по разным лучам или модам. Наиболее рельефно проявляется
конструктивная интерференция при распространении в волноводах широкополосных
сигналов — в этом случае в частотно-пространственной области образуются «гребни»,
представляющие собой зоны интерференционных максимумов, расположенные на поле
интенсивности в виде веерных структур (рис. 1, а). Как показали эксперименты, эти структуры
предсказуемы и робастны (устойчивы к изменению условий распространения и координат) —
инвариантны [1].
К настоящему времени сформировался большой класс практически важных задач, которые
решаются с опорой на устойчивость интерференционной структуры акустических полей в
широком диапазоне частот и расстояний. Теоретически и экспериментально показано, что
накопление мощности сигнала вдоль линий гребней повышает эффективность обнаружения
слабых сигналов, точность оценки пеленга, расстояния и радиальной компоненты скорости
движения [2, 3]. Отметим, что описание инварианта Чупрова основано на анализе полей
интенсивности, в которых фазовая информация отсутствует. Не менее эффективное накопление
мощности сигнала можно осуществить, когерентно суммируя сигналы вдоль линий равных
фаз [4].
Рассмотрим в общем виде эту задачу в трехмерном пространстве (ω, r, φ), где ω — частота;
r — расстояние; φ —фаза давления. На линиях равных фаз φ(ω, r)=const, полный дифференциал
равен нулю, откуда получим обыкновенное дифференциальное уравнение первого порядка,
решением которого являются функции φ(ω, r). Задавая некоторое начальное условие для t0, в
любом волноводе можно поставить задачу Коши для выделения линий, на которых фазы
постоянные. Решим эту задачу применительно к волноводу Пекериса, в котором поле звукового
давления P имеет вид [5]:
90
Гидроакустические системы
=
P(ω, r , z0 , z , t )
ωρ0
h
8π N
∑ pl exp [iϕl (ω, r )]
kr l =1
,
(1)
где z0 и z — глубины источника и приемника; ρ0 , ρ1 — плотности воды и грунта; h — толщина
волновода;
N
—
количество
нормальных
волн;
pl =π
sin(l z0 /H ) sin(l πz /H ) ,
l = 1,2,..., N — коэффициенты их возбуждения; H =
h + m / k ν 0 — эффективная толщина
волновода, m = ρ1/ρ0, ν 02 = 1 − n02 , n0 = c0 / c1 < 1 , c1 — скорость звука в полупространстве;
kl k cos(π l/kH ) — волновое число l-й нормальной волны.
ϕl (ω, r=) kl r − ω t − π/4 — фаза и=
В этих соотношениях частота ω и расстояние r — аргументы, а время t — параметр.
После некоторых преобразований в частотной области получим для линии равных фаз
дифференциальное уравнение
dr / d ω = − r (1 + πhC / kH 2 ) + tc0 D / ω = (βϕ r − tc0 D) / ω ,
где C ==
S1 / S , D = S 2 / S , S
N
S1
N
N
∑∑ pl pm cos
=l 1 =
m 1
mπ
N
∑∑ mp p sin kH cos(ϕ − ϕ ) .
=l 1 =
m 1
l
m
l
m
(2)
N N
mπ
cos(=
ϕl − ϕm ) , S 2 ∑∑ pl pm cos(ϕl − ϕm ) ,
kH
m 1
=l 1 =
Дополнительный
анализ
и
вычислительные
эксперименты показали, что параметр βϕ из уравнения (2) слабо зависит от свойств волновода,
расстояния r и частоты ω. После замены переменной r ′ = r − At уравнение (4) принимает вид
dr ′ / d ω = βφ r ′ / ω . Заметим, что в [1−3] используется аналогичное дифференциальное уравнение
вида dr d ω = β r ω , которым в пространственно-частотной области поля интенсивности
описываются линии «гребней». При этом во многих практически важных случаях коэффициент
β оказывается близок к «+1», Вид решений уравнения (2) существенно зависит от знака
параметра βφ, который подобен инварианту β, но отличается количественно и по физическому
β = −[1 + πhC / (kH 2 )].
Если рассматривать волновод, частоты и расстояния, при
смыслу: ϕ
|β |
2
которых 1 + πhC / kH > 0 , то решениями уравнения (2) являются функции вида r (ω)= a / ω ϕ ,
и линии равных фаз оказываются подобны гиперболам [4]. Можно предположить, что такие
зависимости будут обнаружены и звуковых полях, распространяющихся в воздушной полусфере
и в электромагнитных волноводах.
На рис. 1 приведены контурные графики, отображающие отличия веерной структуры поля
интенсивности (рис. 1, а) от структуры поля фазы (рис. 1, б) звукового давления в частотнопространственной области. Расчеты выполнены в волноводе глубиной 200 м с параметрами дна
m = 2,7 и n0 = 0,83, при скорости звука в воде 1500 м/с. Источник сигнала находится на глубине
20 м, прием осуществляется на глубине 100 м. Видно, что линии равных фаз близки к гиперболам
(рис. 1, б), но на этих линиях присутствуют резкие скачки фазы, обусловленные наличием в
волноводе полюсов — зон дислокации фаз, которые формируются в зонах интерференционных
минимумов давления [5]. Возникают разрывы монотонной зависимости ϕ(ω, r). В качестве
примера, в диапазоне частот 100–120 Гц и на расстояниях 1000–2000 м выполнены расчеты
фактических линий гребня и равных фаз, а также рассчитанной по уравнению (2) теоретической
линии равных фаз. На рис. 2, а представлены: выходящие из одной из точек локального
максимума на частоте 100 Гц линия гребня (кривая 1), а также привязанные к этой точке
начальными условиями фактическая (кривая 2) и теоретическая (кривая 3) линии равных фаз.
91
Гидроакустические системы
а
б
Рис. 1. Контурные графики полей интенсивности и фаз давления в частотно-пространственной области
а
в
б
Рис. 2. Зависимости от частоты
г
Кривая 1 — линии гребня; кривые 2, 3 — фактической – численной и теоретической линий равных фаз,
соответственно; амплитуды давления вдоль гребня (кривая 4) и вдоль фактической (кривая 5) и теоретической
(кривая 6) линий равных фаз; фазы давления вдоль гребня (кривая 7) и вдоль теоретической (кривая 8)
и фактической (кривая 9) линий равных фаз; 10 — зависимость от частоты βϕ (фазового инварианта)
Далее для тех же частот были рассчитаны амплитуды (рис. 2, б) и фазы (рис. 2, в) звукового
давления. На рис. 2, б видно, что линия равных фаз может пересекать несколько соседних
гребней и амплитуда давления на ней может быть близкой, меньше, а на отдельных участках
даже больше (кривые 5, 6), чем амплитуда на линии гребня (кривая 4). Фаза давления на линии
гребня (кривая 7) не постоянная, а растет с некоторым градиентом. Фазы вдоль линии равных
фаз (кривые 8, 9) постоянные — они параллельны оси абсцисс. Значения фазового инварианта βφ
практически не зависят от частоты (кривая 10) и близки к «–1». Достаточно резкие изменения
фазового инварианта βφ наблюдаются только в зонах дислокаций — зонах с большими
градиентами фазы. При различных условиях распространения инварианты βφ стабильны.
Таким образом, для условий мелкого моря установлено существование линий равных фаз
и инварианта на фазовой плоскости, подобного интерференционному инварианту Чупрова,
полученному для описания полей интенсивности также в мелком море. Но в отличие от
инварианта Чупрова суммирование Фурье-компонент вдоль линий равных фаз производится
когерентно, а не энергетически. Это может существенно увеличить помехоустойчивость
обнаружения и оценки координат.
92
Гидроакустические системы
Литература
1. Чупров С. Д. Акустика океана: современное состояние. М.: Наука, 1982. С. 71–91.
2. Кенигсбергер Г. В., Колинько В. Г., Кузнецов Г. Н. Авторское свидетельство № 286264, приоритет
изобретения от 16.06.1987 г., зарегистрировано 02.01.1989 г.
3. Kuznetsov G. N., Kuz’kin V. M., Pereselkov S. A. Acoustic interferometry in problems of the passive
localization of sound sources, underwater communications, and the monitoring of oceanic inhomogeneities // Bull.
Russ. Acad. Sci. Phys. 2020. Vol. 84. P. 648–652.
4. Белова Н. И.,
Кузнецов Г. Н.,
Степанов А. Н.
Экспериментальное
исследование
интерференционной и фазовой структуры потока мощности от локальных источников в мелком море //
Акуст. журн. 2016. Т. 62, № 3. С. 318–329.
5. Бреховских Л. М. Волны в слоистых средах. М.: Наука, 1973.
93
Гидроакустические системы
ПОВЫШЕНИЕ ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИЕМНОГО ТРАКТА
ГИДРОАКУСТИЧЕСКИХ СИСТЕМ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ
А. О. Смирнов
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
INCREASING RECEIVING CIRCUIT TECHNICAL PARAMETERS
FOR UNDERWATER SYSTEMS WITH PHASED ARRAY ANTENNA
А. О. Smirnov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Статья посвящена решению проблем повышения технических характеристик приемного тракта в части
идентичности параметров каналов, расширения динамического диапазона принимаемых
сигналов,повышения надежности всей системы путем внедрения аналого-цифровых преобразователей с
избыточной частотой дискретизации, дополненных специальной системой синхронизации.
This article is devoted to solving the problem of improving underwater system receiving circuit performance
regarding channel identity and dynamic range extension by using oversampled analog-to-digital convertors
supplemented with special synchronization system.
Как для пассивного, так и для активного режимов работы гидроакустического комплекса
для повышения отношения сигнал/шум и, соответственно, улучшения тактико-технических
характеристик гидроакустических комплексов одним из методов обработки сигналов является
пространственная обработка сигналов, т.е. формирование большого числа характеристик
направленности (ХН). Минимизация потерь по помехоустойчивости при пространственной
обработке сигналов требует обеспечения высокой идентичности амплитудно-частотных и фазочастотных характеристик каждого канала системы предварительной обработки (СПО) и их
стабильности во времени, а также сохранения когерентности исходных аналоговых сигналов при
аналого-цифровом преобразовании, что на практике сводится к проблемам синхронизации
аналого-цифровых преобразователей в распределенной системе.
Исходя из требований по увеличению динамического диапазона в новых разработках,
необходимо применять аналого-цифровые преобразователи (АЦП) с большей разрешающей
способностью. Для повышения динамического диапазона такие АЦП используют определенные
алгоритмы избыточной дискретизации, цифровой фильтрации и децимации.
Однако при применении АЦП с избыточной частотой дискретизации выдвигается ряд
требований при разработке СПО. Во-первых, использование цифровых фильтров в аналогоцифровых преобразователях с избыточной частотой дискретизации (АЦП-ИЧД) приводит к
необходимости передачи более высокой частоты тактового сигнала, что ужесточает требования
к трактам формирования и преобразования тактового сигнала в системе синхронизации. Вовторых, при возникновении сбоя при передаче импульсов частоты дискретизации система не
сможет сама восстановиться, как при использовании традиционных АЦП последовательного
приближения, т.к. принцип работы АЦП-ИЧД не позволяет осуществлять синхронизацию АЦП
с помощью импульсов частоты дискретизации [1]. Нарушение синхронной работы АЦП
вследствие дестабилизирующих факторов приводит к потере информации о фазе сигнала и,
следовательно, к невозможности формирования ХН.
В АО «Концерн «Океанприбор» разработан способ синхронизации АЦП-ИЧД,
использующий узел следящей синхронизации с автоматическим восстановлением сбившегося
АЦП в системе [2]. Недостатком такого способа является необходимость передачи
высокочастотного тактового сигнала по всей системе сбора данных на большие расстояния, что
приводит к задержкам при его распространении и увеличению джиттера (дрожания фронтов)
тактовых импульсов, сказывающихся на динамическом диапазоне полезного сигнала.
Для исключения недостатков способа, приведенного выше, разработана система
синхронизации АЦП-ИЧД на основе контура фазовой автоподстройки частоты (ФАПЧ) с
кварцевым генератором, управляемым напряжением (ГУН). В [3] и [4] предложен способ
синхронизации с использованием фазовой автоподстройки частоты с кварцевым управляемым
генератором.
94
Гидроакустические системы
На рис. 1 представлена функциональная схема системы синхронизации нескольких
универсальных гидроакустических модулей, расположенных на значительном удалении друг от
друга.
При подаче на вход системы опорного низкочастотного сигнала Fd=19,5 кГц
осуществляется синхронизация этого сигнала к сигналу DRDY (готовность данных АЦП),
вырабатываемому на соответствующем выходе АЦП-ИЧД. Сигнал DRDY используется как
частота дискретизации для синхронизации многоканальной системы сбора и передачи данных.
На рис. 2 представлена работа нескольких УМГА с АЦП-ИЧД с включенной системой
синхронизации. Как можно видеть, сигналы готовности данных формируются в один момент
времени, что говорит о том, что система становится когерентной.
В связи с тем, что система предварительной обработки сигналов гидроакустического
комплекса является распределенной, опорный сигнал Fd может поступать в УМГА в разный
момент времени. Данное расхождение может быть связано с конфигурацией системы и может
возникать при несогласованности среды распространения сигнала, нестабильности порога
срабатывания логических элементов, разной длины кабелей до оконечных модулей, а также при
возникновении электромагнитных помех.
Рис. 1. Функциональная схема системы синхронизации СПО
Рис. 2. Работа трех АЦП-ИЧД с включенной системой синхронизации
95
Гидроакустические системы
Рис. 3. Сигналы двух каналов разных АЦП-ИЧД с учетом подстройки фазы опорного сигнала
В реальной системе необходимо предусмотреть обратную связь с ЦВК. Например, при
первом включении системы УМГА переходят в режим контроля, и на вход каждого аналогового
канала подается стимулирующий сигнал. ЦВК анализирует разницу фаз между полученными
контрольными сигналами от УМГА и формирует код для каждого модуля для сдвига фазы
опорного сигнала на необходимое значение. На рис. 3 при включенной системе синхронизации
и сформированным кодом задержки опорного сигнала для каждого УМГА разность фаз двух
каналов не превышает 0,017 градусов на частоте 5 кГц.
Из рисунков видно, что схема синхронизации АЦП-ИЧД внешним низкочастотным
периодическим сигналом с кварцевым ГУН, представленная на рис. 1, позволяет обеспечить
синхронизацию всех АЦП-ИЧД по частоте. Т.е. частота дискретизации всех АЦП-ИЧД,
входящих в систему, будет равна частоте опорного сигнала. Но если не принять дополнительных
мер каждый АЦП-ИЧД будет работать со своим сдвигом по фазе относительно опорного
сигнала.
Применение АЦП-ИЧД позволило расширить динамический диапазон СПО, упростить
фильтры преддискретизации и узлы регулировки усиления, соответственно, снизить габариты,
стоимость и время производства изделия.
Литература
1. Смирнов А. О., Бочарова Д. В., Кузьмин Д. А. и др. Опыт разработки многоканальной аппаратуры
предварительной обработки сигналов для унифицированных модулей гидроакустических антенн (УМГА)
// Тр. III объединенной конференции МАГ-2013 ОАО «Концерн «Океанприбор». 2013. С. 221−224.
2. Горлин А. В., Смирнов А. О. и др. Способ синхронизации аналого-цифровых преобразователей с
избыточной частотой дискретизации // Патент RU2013126130A. 10.12.2014. Бюл. № 34.
3. Володин А. Д., Горлин А. В., Смирнов А. О. Цифровая система синхронизации аналого-цифровых
преобразователей на базе программируемой логической интегрированной схемы для протяженных антенн
// Тр. II научно-практической конференции молодых специалистов интегрированной структуры
АО «Концерн «Океанприбор» ИСТОК-2018.2018. С. 112–115.
4. Калинин В. О., Горлин А. В., Смирнов А. О., Синяев М. В. Расчет системы фазовой
автоподстройки частоты (ФАПЧ) для синхронизации АЦП-ИЧД с аналоговым управляемым генератором
// Тр. II Научно-практической конференции молодых специалистов интегрированной структуры
АО «Концерн «Океанприбор» ИСТОК-2018. 2018. С. 123–127.
96
Гидроакустические системы
АППАРАТНЫЕ СРЕДСТВА ОБЕСПЕЧЕНИЯ ИНФОРМАЦИОННОГО ОБМЕНА
АВТОНОМНЫХ РОБОТИЗИРОВАННЫХ КОМПЛЕКСОВ
И. И. Попов
АО «НИИ гидросвязи «Штиль», Волгоград, Россия
HARDWARE FOR INFORMATION EXCHANGE FOR AUTONOMOUS ROBOTIC
COMPEXES
I. I. Popov
JSC «Research Institute of Hydrocommunications «Shtil», Volgograd, Russia
В докладе рассматриваются результаты разработки вычислительных средств для реализации режима
гидроакустической связи в морских робототехнических комплексах
In the report examines the results of the development of computing tools for the implementation
of the hydroacoustic communication mode in marine robotic complexes.
В настоящее время широко развивается тематика автономных робототехнических
комплексов (далее «АРК») для использования их в условиях открытого океана, а также
разработка маяков для обеспечения позиционирования робототехнических комплексов.
Для выполнения ряда задач (поисковых, исследовательских и т.д.) в робототехнических
комплексах применяются гидроакустические станции связи и навигации. Такие станции
выполняют свой функционал по обеспечению двухсторонней гидроакустической связи (режимы
«Телеуправление» и «Телеметрия») и навигации (пеленгование гидроакустических сигналов).
Режим передачи команд телеуправления строится на принципе передачи условных
номеров команд (условных номеров формуляров и их наполнения).
Режим передачи телеметрической информации обеспечивает обмен сообщениями с
произвольным наполнением и большим объемом данных. Здесь на первый план выходят такие
показатели как скорость передачи информации и вероятность битовой ошибки.
Для выполнения задачи гидроакустической навигации в настоящий момент наиболее
целесообразным является использование специального набора шумоподобных сигналов на
основе М-последовательностей, оптимизированных для их пеленгования.
Все перечисленные режимы требуют применения высокопроизводительных
вычислительных систем (сигнальных процессоров с плавающей запятой) для обработки и
формирования сигналов.
В течении длительного времени при проектировании систем гидроакустической связи и
навигации (включая АРК) АО «НИИ гидросвязи «Штиль» применялись вычислительные модули
иностранного производства. Впоследствии в АО «НИИ гидросвязи «Штиль» разработано и
внедрено 2 поколения вычислительных модулей (далее «ВМ») и в настоящий момент
разрабатывается 3-е поколение.
До 2017 г. для реализации гидроакустической связи и навигации в АРК применялись
вычислительные модули импортного производства (фирма DanvilleSignal, США). В 2017 г.
АО «НИИ гидросвязи «Штиль» впервые применило в АРК вычислительные модули 1-го
поколения собственной разработки и изготовления (рисунок 1а). Вычислительный модуль
выполнен целиком на импортной элементной базе, вследствие чего является самым
миниатюрным вычислительным модулем разработки АО «НИИ гидросвязи «Штиль».
В 2022 г. АО «НИИ гидросвязи «Штиль» разработало, изготовило и испытало ВМ 2-го
поколения (рис. 1, б). При разработке данного вычислительного модуля ставилась основная
задача минимального использования импортной ЭКБ и уменьшение его энергопотребления.
ВМ 2-го поколения представляет собой законченный функциональный узел, достаточный
для реализации модема режимов гидроакустической связи и навигации, с аналоговыми
входными и выходными каналами. Все необходимые компоненты ВМ размещены на единой
плате, которую можно использовать в виде мезонинной надстройки.
97
Гидроакустические системы
а
б
Рис. 1. Вычислительные модули 1-го и 2-го поколения разработки
и изготовления АО «НИИ гидросвязи «Штиль»
в
В настоящее время АО «НИИ гидросвязи «Штиль» разрабатывает вычислительный модуль
3 поколения (рис. 1, в). В концепцию ВМ 3-го поколения заложено существенное увеличение
производительности по сравнению с ВМ предыдущих поколений.
Сравнение характеристик вычислительных модулей импортного производства, а также
вычислительных модулей всех поколений, разработанных и разрабатываемых АО «НИИ
гидросвязи «Штиль» приведено в табл. 1.
Таблица 1
Габариты
Процессор
Архитектура
Потребление
Питание
Макс. частота
Производительность
ОЗУ
Flash
ADC/DAC
I/O
Импортная ЭКБ
ВМ импортного
производства
ВМ 1-го
поколения
ВМ 2-го
поколения
ВМ 3-го
поколения
60×60×35 мм
ADSP-21469
SHARC
1,5 Вт
4−20 В
450 МГц
До 2,7 ГФлопс
1024 Мб
16 Мб
До 24 бит,
До 96 кSPS
До 4 аналоговых
I/O
100 %
75×60×30 мм
ADSP-21489
SHARC
1,5 Вт
4,5−18 В
450 МГц
До 2,7 ГФлопс
До 512 Мб
16 Мб
До 24 бит,
До 96 кSPS
До 4 аналоговых
I/O
100 %
130×80×20 мм
ADSP-21489
SHARC
1,2 Вт
4−5,5 В
450 МГц
До 2,7 ГФлопс
До 512 Мб
16 Мб
До 24 бит,
До 96 кSPS
До 4 аналоговых
I/O
10 %
130×80×20 мм
ADSP-21565
SHARC+
2,0 Вт
4−5,5 В
1000 МГц
До 5 ГФлопс
8 Мб
16 Мб
До 24 бит,
До 96 кSPS
До 2 аналоговых
I/O
15 %
Из информации в табл. 2 можно сделать следующие выводы:
1. ВМ 2 поколения обладает самыми лучшими параметрами по энергопотреблению и
могут быть использованы в энергоэффективных схемах (маяки ответчики, ГАНС УКБ);
2. ВМ 3 поколения обладают лучшими характеристиками по производительности. Данные
ВМ планируются к использованию в режимах гидроакустической связи на основе OFDM
модуляции.
Вышеописанные вычислительные модули применяются АО «НИИ гидросвязи «Штиль» не
только для реализации режимов гидроакустической связи, но и для построения систем
гидроакустической навигации на базе пеленгования гидроакустических сигналов.
Для построения гидроакустических навигационных систем (далее «ГАНС») в АО «НИИ
гидросвязи «Штиль» разработаны специальные многоэлементные гидроакустические антенны
для задач пеленгования гидроакустических сигналов.
На рис. 2 представлены две УКБ антенны, первая, состоящая из 7 элементов и имеющая
габариты 260×351 мм. И вторая, состоящая из 4 элементов и имеющая габариты 146×210 мм.
98
Гидроакустические системы
Рис. 2. 7 и 4-элементные УКБ-антенны
Представленные антенны успешно прошли испытания, которые позволили определить
основные характеристики прототипов ГАНС. Сравнение характеристик прототипов ГАНС
АО «НИИ гидросвязи «Штиль» с ГАСН импортного производства при определении курсового
угла (далее «КУ») на источник гидроакустического сигнала в составе аналогичных ГАСН
представлено в табл. 2.
Таблица 2
Дальность действия
(энергетическая)
Точность определения КУ
(приборная)
Точность определения
дистанции (приборная)
Потребляемая мощность:
− дежурный режим
ГАНС УКБ
(4-эл)
S2C R 18/34H
(Evologics)
Posidonia II
ГАНС УКБ
(7-эл)
До 5 км
До 3,5 км
До 10 км
До 10 км
0,5°
0,5°
0,1°
0,3°
0,01 м
0,01 м
0,2 %
0,01 м
1,4 Вт
1,4 Вт
15 Вт
10 Вт
Из информации в табл. 2 можно сделать следующие выводы:
1. прототип ГАНС УКБ на 4-х элементной антенне обладает большей дальностью, чем
импортный аналог фирмы Evologics, и сравним по потребляемой мощности в дежурном режиме;
2. прототип ГАНС УКБ на 7-х элементной антенне по характеристикам сравним с
аналогичными ГАНС импортного производства.
99
Гидроакустические системы
СПОСОБЫ ИНФОРМАЦИОННОГО НАПОЛНЕНИЯ СИГНАЛОВ
ГИДРОАКУСТИЧЕСКОЙ СВЯЗИ ДЛЯ ВЗАИМОДЕЙСТВИЯ С НЕОБИТАЕМЫМИ
АППАРАТАМИ
А. О. Чилингаров
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
INFORMATION SOURCE CODING METHODS FOR UNDERWATER UNMANNED
VEHICLES ACOUSTIC COMMUNICATION SYSTEM
A. O. Chilingarov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В работе рассмотрены два варианта информационного наполнения сигналов связи для организации
управления подводными аппаратами. Первый вариант наполнения реализует передачу формализованных
сообщений. Второй вариант может быть использован для передачи произвольной информации,
представленной в двоичном виде. Полученные решения могут быть использованы при разработке
системы управления необитаемыми аппаратами, а также при организации информационного обмена в
сетевой гидроакустической коммуникационной системе.
Current work is dedicated to source coding of underwater acoustic communication system. The aim of the work is
providing underwater unmanned vehicle control. The first method realizes formalized messages. The second
method performs irregular size binary data block transmission. The results of the work can be used for underwater
unmanned vehicle control system and acoustic communication network development.
Введение. Одной из основных задач, решаемых современными системами
гидроакустической связи, является управление подводными аппаратами [1]. Различные
варианты информационного обмена в системах с автономными необитаемыми подводными
аппаратами (АНПА) можно разделить на две группы: телеуправление и телеметрия [2].
К режимам телеуправления относятся системы связи, предназначенные для передачи коротких,
строго формализованных данных. Режимы телеметрии используются для передачи
произвольных данных, объем которых ограничивается временем излучения.
Цель настоящей работы: расширение возможностей информационного обмена с АНПА по
гидроакустическому каналу с помощью совершенствования информационного наполнения
сигналов связи.
Информационное наполнение режима телеуправление. Режим телеуправления может
быть использован для передачи формализованных команд управления АНПА, а также для
выдачи отчетов с формализованным содержанием.
Для передачи коротких сигналов используются сигналы Триада. По сравнению с режимом
связи короткими сообщениями (СКС) сигналы Триада обладают значительно большей
информационной ёмкостью. Они позволяют передать до 24 бит данных за один пакет, против
10 бит в системе СКС [3].
Структура пакета сигнала Триада включает в себя три копии синхронизирующего и
информационного сигнала, передаваемых последовательно (рис. 1).
Сигналы телеуправления могут формироваться на основе одного или двух
информационных формирующих полиномов. Число информационных полиномов определяет
количество слов данных, которые могут быть переданы в рамках одного пакета. При
формировании сигнала на основе одного информационного полинома (mи1) могут быть переданы
три слова данных, при формировании на основе двух (mи1 и mи2) информационных полиномов
могут быть переданы шесть слов данных.
Все пакеты в предложенном информационном наполнении являются адресными. Два слова
данных в каждом пакете сигнала Триада выделено под передачу идентификационных номеров
(ИН) отправителя и получателя сообщения.
Типовое информационное наполнение сигнала телеуправления, используемого для
передачи команды от оператора к АНПА, приведено в табл. 1.
100
Гидроакустические системы
Синхросигнал Sc(t)
Синхросигнал Sc(t)
Синхросигнал Sc(t)
Видоизменяющая
последовательность
Видоизменяющая
последовательность
Видоизменяющая
последовательность
Слово данных 1-1
Слово данных 1-1
Слово данных 1-1
Слово данных 1-2
Слово данных 1-2
Слово данных 1-2
Слово данных 1-3
Слово данных 1-3
Слово данных 1-3
Слово данных 2-1
Слово данных 2-1
Слово данных 2-1
Слово данных 2-2
Слово данных 2-2
Слово данных 2-2
Слово данных 2-3
Слово данных 2-3
Слово данных 2-3
Тс
Тс
Тс
mи1(t)
Информационный
сигнал Sи(t)
mи2(t)
Тизл
Рис. 1. Структура пакета сигнала Триада
Таблица 1
Информационное наполнение сигнала
Слово Данных
1-1
ИН Отправителя
1-2
ИН Получателя
1-3
Тип команды
№ позиции
Дополнительные сведения
001-120
Признак «сигнал с одним инфо.»
121-240
−
301-420
Резервный параметр
421-540
541-620
Резервный параметр
Резервный параметр
621-1020
−
При использовании сигнала на основе одного информационного полинома для передачи
доступны три слова данных.
Значения первого слова (1-1) в пределах от 1 до 120 используются для индикации того, что
передаваемый сигнал сформирован на основе единственного информационного полинома.
Значения первого слова в пределах то 121 до 240 используются для индикации того, что сигнал
сформирован на основе двух информационных полиномов. Основной информацией в первом
слове данных выступает идентификационный номер передатчика информации.
Второе слово (1-2) для передачи индивидуального номера получателя. Диапазон
возможных значений идентификационных номеров узла 1-120. В эти значения могут включаться
широковещательные адреса. Для передачи значения идентификационных номеров выделено три
возможных диапазона. Номер используемого диапазона может быть использован для передачи
дополнительной информации.
Третье слово (1-3) используется для передачи информации. Доступен алфавит из 400 слов
для передачи. Примером полезной информации являются пакеты («Запрос взаимодействия»,
«Отмена», «Подтверждение»), команды («Выход на связь», «Возвращение в точку», «Начало
сеанса»).
При использовании сигналов на основе двух информационных полиномов тип
информационного наполнения передается в слове (1-3). Алфавит из 400 возможных слов данных
определяет формат информационного наполнения слов, формируемого вторым
информационным полиномом.
101
Гидроакустические системы
Для каждого из заданных значений слова данных (1-3) доступны дополнительные
параметры и диапазон их значений для передачи. Для передачи полезной информации
используется два слова (2-1 и 2-2). Слово (2-3) данных используется для передачи значения
контрольной суммы, вычисленной для первых пяти слов (1-1, 1-2, 1-3, 2-1, 2-2). Контрольная
сумма представляет собой результат вычисления хэш-суммы исходных слов данных [4].
Алгоритм вычисления контрольной суммы не зависит от информационного наполнения [5].
Представленная структура информационного наполнения позволяет реализовать передачу
следующей информации:
1. Служебные пакеты установки соединения и контроля состояния.
2. Команд с дополнительными параметрами:
2.1. Двигаться курсом "Х" со скоростью "Y" в течении "Z" секунд.
2.2. Изменить глубину до значения "Х".
2.3. Принять список из "Х" команд.
2.4. Выдать отчет о состоянии.
3. Отчетов о состоянии корреспондента:
3.1. Выполняю список из "Х" команд
3.2. Выполнил "Х" команд.
3.3. Отчет о местоположении.
3.4. Отчет о параметрах движения.
Заключение. При создании систем дистанционного управления подводными аппаратами
актуальными остаются вопросы задержки доставки данных и достоверности передаваемой
информации. Предложенный вариант информационного наполнения сигналов реализует
передачу команд и отчетов общей информационной ёмкостью до 48 бит. Достоверность
передачи обеспечивается системой контроля целостности пакета с использованием контрольной
суммы.
Литература
1. Stojanovic M. Underwater wireless communications: current achievements and research challenges //
IEEE Oceanic Engineering Society Newsletter (Spring). 2006.
2. Ерошенко С. В., Кранц В. З. Принцип построения гидроакустической системы телеуправления
с использованием сигналов «ТРИАДА» // Гидроакустика. 2021. Вып. 47 (3). С. 42–51.
3. Блинов Д. А., Чилингаров А. О. Сигналы связи для решения задач телеметрии в сетевых
гидроакустических системах // Морская радиоэлектроника. 2022. № 3 (81)
4. Блейхут Р. Теория и практика кодов, контролирующих ошибки. М.: Мир, 1986. 576 с.
5. Antipolis S. CRC-8 encoder (for packetized streams only) // European Telecommunications Standards
Institutes. 2013. 17 p.
102
Гидроакустические системы
ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ ПОДВОДНЫХ РОБОТОВ В ЗАДАЧАХ
КОНТРОЛЯ ШУМОВОЙ ПОДВОДНОЙ ОБСТАНОВКИ
А. А. Борейко1, канд. техн. наук, Ю. В. Матвиенко1, д-р техн. наук, С. А. Переселков2, д-р физ.-мат. наук,
Ю. А. Хворостов1
1
Институт проблем морских технологий им. акад. М.Д. Агеева ДВО РАН, Владивосток, Россия
2
Воронежский государственный университет, Воронеж, Россия
PROSPECTS FOR THE APPLICATION OF UNDERWATER ROBOTS IN TASKS
OF CONTROL OF UNDERWATER NOISE ENVIRONMENTS
A. A. Boreyko1, Ph.D., Yu. V. Matvienko1, Dr.Sc., S. A. Pereselkov2, Dr.Sc., Yu. A. Khvorostov1
1
Institute of Marine Technology Problems FEB RAS, Vladivostok, Russia
2
Voronezh State University, Voronezh, Russia
В работе анализируется возможность создания мобильных быстро развертываемых систем контроля
шумовой подводной обстановки с использованием подводных роботов в локальных морских районах.
Отмечено, что задачи могут быть решены при применении гибридных подводных аппаратов, несущих
комбинированные скалярно-векторные приемники звука. В таких аппаратах обычные функции робота
как транспортного средства дополнены возможностями реализации режима подводного глайдера для
экономичного выхода в удаленный район обследования, малошумной приемной гидроакустической
станции, управляемого режима движения по толще воды и режима радиобуя со средствами навигации и
связи. Отмечено также, что перспективы применения такого гибридного аппарата определяются
возможностью решения задач назначения в реальном времени на его борту.
The paper analyzes the possibility of creating mobile, quickly deployable systems for monitoring the underwater
noise environment in local areas using underwater robots. It is noted that problems can be solved by using hybrid
underwater vehicles carrying combined scalar-vector sound receivers. In such devices, the usual functions of a
robot as a vehicle are complemented by the possibility of implementing an underwater glider mode for economical
access to a remote patrol area, a low-noise receiving hydroacoustic station with a controlled mode of movement
through the water column, and a radio beacon mode with navigation and communication means. It is also noted
that the prospects for the use of such a hybrid device are determined by the ability to solve assignment problems
in real time on board.
Автономные подводные роботы находят все большее применение в различных реальных
работах и исследованиях и, как правило, реализуются в видемногоцелевых аппаратов и
комплексов, предназначенных для широкого спектра работ по автоматическому поиску и
обследованию морского дна и подводной инфраструктуры [1]. Большой интерес вызывает также
развитиеузко специализированных подводных роботов, инструментальное оборудование
которых служит для решения важных конкретных задач. Одной из таких прикладных задач
является контроль подводной обстановки в локальных акваториях на основе анализа шумового
звукового поля. Для измерения шумовых полей подводных движущихся источников звука с
целью их обнаружения и идентификации наиболее эффективны приемные системы содержащие
комбинированные скалярно-векторные приемники звука (СВП) [2]. Такие приемники из точки
установки, координаты которой известны, определяют угловое положение источника, а при
установке в акватории нескольких разнесенных приемников их совместная обработка позволяет
решать задачу определения места и контролировать траекторию движения источника шума
[3, 4]. Поскольку звуковое поле подводного движущегося источника стратифицировано по
глубине волновода, что особенно проявляется в условиях мелкого моря, эффективными
информативными параметрами обнаружения движущегося подводного источника шумовых
сигналов являются характеристики вектора потока мощности, измеряемые с использованием
СВП [5−7]. Максимальное значение этих параметров наблюдается в зонах повышенной
освещенности, положение которых динамически изменяется при движении источника шума.
Поиск зон повышенной освещенности в звуковом поле может быть реализованпри отслеживании
динамики звукового поля с использованием приемнойсистемы из СВП, установленной на борту
малошумного движущегося подводного носителя. Таким носителем может быть автономный
необитаемый подводный аппарат (АНПА). Однако к аппаратам, решающим задачу обнаружения,
предъявляются дополнительные требования для обеспечения эффективного применения
103
Гидроакустические системы
акустических приемников, связанные с исключением влияния собственных акустических шумов
и необходимостью движения в районе работ для поиска зон повышенной освещенности
контролируемого звукового поля. Переконфигурирование АНПА со штатными средствами
движения в станцию приема слабых сигналов с возможностью бесшумного управляемого
движения может быть реализовано гибридным АНПА, оснащенным системами регулирования
плавучести и остойчивости [8].
В гибридном АНПА бортовая система управления жесткой программой реализует две
функции — как собственно АНПА, способного своим ходом выходить в район обследования, так
и функцию «планера» с отключенными системами движения, перемещением в акватории по
вертикальной координате за счет регулирования своей плавучести и остойчивости с приемом
шумовых сигналов. Такая модель использования устанавливает периодическое появление
АНПА на поверхности, во время которого штатными средствами радиосвязи в пункт управления
передаются результаты контроля. При использовании АНПА по назначению устанавливается
следующий порядок. Первоначально АНПА отбалансирован как самоходный АНПА с нулевым
дифферентом и небольшой положительной плавучестью. При получении задания на выполнение
миссии аппарат стартует, например, от судна носителя в назначенную координатную точку.
В штатных режимах используются его системы энергетики, движения, бортового управления,
навигации и связи. При выходе в точку с назначенными координатами активируется режим
превращения самоходного АНПА в бесшумный подводный планер, для чего выключаются все
системы движения, а системы управления плавучестью и остойчивостью получают команды
обеспечить дифферент на корму 90 град и небольшую отрицательную плавучесть. Включается
приемная антенна и система обработки данных от СВП. АНПА начинает медленное погружение
и ведет прием и обработку данных.
В бортовой системе обработки могут быть реализованы алгоритм интерферометрического
метода обнаружения [9] или алгоритм, основанный на анализе время-частотно-углового прихода
энергии [10]. Последний включает расчет текущих спектральных характеристик акустического
давления и компонент колебательной скорости звукового поля, накопление и осреднение
горизонтальных компонент вектора интенсивности для сформированных частотных каналов,
расчеты углов прихода акустической энергии для частотных каналов, формирование углового
распределения энергии путем суммирования энергий отдельных частот по узким угловым
секторам, охватывающим весь горизонт наблюдения, выделение углового сектора с
максимальной энергией, формирование порога по среднему значению энергий для всего
горизонта и принятие решений об обнаружении источника шумового сигнала, если
максимальный уровень превышает порог по ранее установленному критерию (например, 6, 10,
20 дБ). Причем при первичном обнаружении при недостаточном превышении порогабортовой
системой управления вырабатывается команда на зависание планера на достигнутой глубине для
накопления данных и проверки результата обнаружения. Критерий обнаружения может
ужесточаться. Далее при фиксации факта обнаружения источника шума устанавливается его
угловое положение по среднемузначению угла в выделенном угловом секторе с максимальной
энергией и спектральный состав источника шума — по набору выделенных частот,
формирующих суммарную энергию по выделенному угловому направлению. Результат
обнаружения формируется в виде короткого формализованного сообщения, включающего
информацию о факте обнаружения, пеленг, спектральный состав и значение порога, которое
передается в систему бортового управления АНПА, выдающую команду в систему управления
плавучестью для формирования максимальной положительной плавучести, обеспечивающей
экстренное всплытие на поверхность. При всплытии дополнительно определяются текущие
координаты аппарата, которые в составе формализованного сообщения об обнаружении
передаются по радио или спутниковой связи в пункт принятия решения.
104
Гидроакустические системы
Литература
1. Инзарцев А. В., Киселев Л. В., Костенко В. В., Матвиенко Ю. В., Павин А. М., Щербатюк А. Ф.
Подводные робототехнические комплексы: системы, технологии, применение / Под ред. Л.В. Киселев];
ФГБУН Ин-т проблем морских технологий ДВО РАН. Владивосток: 2018. 368 с. ISBN 978-5-7311
-0486-79.
2. Гордиенко В. А. и др. Векторно-фазовые методы и создание перспективных акустических систем
нового поколения // Вестник Московского университета «Физика. Астрономия». Серия 3. 2014. № 2.
С. 3−21.
3. Захаров К. Л. Частотно-угловые характеристики гидроакустического сигнала при
использовании векторно-фазового метода // Электронное научное издание «Устойчивое инновационное
развитие: проектирование и управление». 2014. Т. 10, № 3 (24). С. 7. www.rypravlenie.ru
4. Матвиенко Ю. В., Хворостов Ю. А., Каморный А. В., Глущенко М. Ю., Кузькин В. М.,
Переселков С. А. Экспериментальные исследования системы обнаружения малошумных подводных целей
в мелководных акваториях // Подводные исследования и робототехника. 2022. № 3 (41). С. 4–14.
5. Шуров В. А., Ляшков А. С., Черкасов А. В. Вихри вектора акустической интенсивности в
интерференционных полях мелкого моря // Подводные исследования и робототехника. Владивосток: изд.
«Дальнаука» ДВО РАН, 2012. № 1(13). С. 4−12.
6. Щуров В. А. Движение акустической энергии в океане. Владивосток: ТОИ ДВО РАН, 2019. 204 с.
ISBN 978-5-6043211-5-7.
7. Дзюба В. П. Скалярно-векторные методы теоретической акустики. Владивосток: Дальнаука,
2006. 195 с. ISBN 5-8044-0559-5.
8. Матвиенко Ю. B., Костенко В. В., Переселков С. А., Хворостов Ю. А. Гибридный АНПА
контроля шумовой подводной обстановки // Подводные исследования и робототехника. 2023. №. 2(44).
С. 20–32. DOI: 10.37102/1992-4429_2023_44_02_02.EDN: KSDAPD.
9. Казначеев И. В., Кузнецов Г. Н., Кузькин В. М., Пересёлков С. А. Интерферометрический метод
обнаружения движущегося источника звука векторно-скалярным приемником // Акустический журнал.
2018. Т. 64, № 1. С. 33−45.
10. Матвиенко Ю. В., Хворостов Ю. А., Каморный А. В. Устройство обнаружения подводного
источника широкополосного шума // Патент РФ № 2784699; Бюл. №34 от 29.11.2022 г.
Исследование выполнено при поддержке гранта Российского научного фонда № 23-61-10024,
https://rscf.ru/project/23-61-10024/.
105
Гидроакустические системы
ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК ДВУХПОЛОСНОГО ЭЛЕКТРИЧЕСКОГО
ЭКВИВАЛЕНТА МОЩНОГО ГИДРОАКУСТИЧЕСКОГО ИЗЛУЧАТЕЛЯ
А. К. Бритенков, канд. физ.-мат. наук, В. А. Фарфель, Р. В. Травин
Институт прикладной физики РАН, Нижний Новгород, Россия
MEASUREMENT OF POWERFUL HYDROACOUSTIC RADIATOR DUAL-BAND
ELECTRICAL EQUIVALENT CHARACTERISTICS
A. K. Britenkov, Ph.D., V. A. Farfel, R. V. Travin
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Согласование системы возбуждения и гидроакустического излучателя (НЧИ) — определяющий фактор
оптимального режима работы мощного гидроакустического комплекса (ГАК). Многие НЧИ имеют
несколько резонансов, что усложняет конструкцию электрического эквивалента. Эксперименты на
макете двухполосного эквивалента НЧИ с резонансными частотами 340 и 580 Гц в режиме имитации
излучения фазоманипулированных сигналов с электрической мощностью более 250 Вт (что
соответствует излучению не менее 150 Вт акустической мощности) показали, что при помощи
подобных изделий можно проводить настройку согласующих устройств и систем возбуждения для
низкочастотных преобразователей со сложными импедансами.
Matching of the excitation system with hydroacoustic source is the main factor of optimal operating of powerful
sonar system. Many transducers have several resonances, that complicates designing of the electrical equivalent.
Results of measurement of two-band transducer equivalent characteristics with resonance frequencies 340 and
580 Hz in mode of simulating of phase-manipulated signals radiation with electrical power of more than 250 W,
(which corresponds to at least 150 W of acoustic power) are presented. The experiments showed possibility to
configure matching devices and an excitation systems for low-frequency transducers with complex impedances.
Введение. Освоение мирового океана тесно связано с расширением сферы применения
гидроакустических излучающих систем. Системы телеуправления подводными необитаемыми
аппаратами с большой дальностью действия зависят от надёжности передачи команд и
устойчивости связи с центром управления, акустическими и радиобуями на удалениях в десятки
и сотни километров. Для обеспечения стабильности каналов связи на таких расстояниях
применяются низкочастотные гидроакустические излучатели (НЧИ) в диапазоне частот от сотен
герц до полутора килогерц [1]. Для испытаний на номинальной мощности и настройки систем
возбуждения таких НЧИ используются электрические эквиваленты, однако в силу специфики
подводимой мощности и частотного диапазона, в существующих эквивалентах соответствие
параметрам эквивалентной схемы преобразователя зачастую оставляет желать лучшего.
Схемы замещения гидроакустических излучателей. Известно, что электрические
эквиваленты позволяют эффективно моделировать процессы различной природы. Схемы
замещения для разных физических процессов существенно различаются. Принципиальные
схемы электрических эквивалентов пьезоэлектрических преобразователей достаточно
разработаны [2], но зачастую такие схемы используются лишь для теоретических расчётов [3],
не учитывая практическую реализацию даже макета электрического эквивалента.
Гидроакустический преобразователь представляет собой сложную систему механических
и электрических цепей, в которых происходит преобразование электрической энергии в
механические колебания с излучением звуковых волн [1]. Из-за многообразия происходящих при
таком преобразовании физических процессов НЧИ имеет несколько резонансных полос (рис. 1)
и не всегда может быть сведен к схеме в виде обобщённого электрического контура с одним
резонансом.
Несмотря на то, что в рабочем диапазоне частот схему замещения НЧИ часто представляют
в виде одиночного колебательного контура, как это показано в работе [4], большинство
излучателей имеют более сложные импедансные характеристики [3]. Так, излучатель типа
БиконТМ с активным элементом из состава ЦТБС-3, имеет две ярко выраженные полосы (рис. 2),
вызванные резонансом колебаний оболочки корпуса НЧИ с присоединённой массой воды и
полуволновым резонансом активного элемента (пьезокерамического столба).
106
Чувствительность излучателя, Па/В
Гидроакустические системы
Резонанс активного
элемента
Комбинации
колебаний
конструктивных
элементов
Механический резонанс
Частота, Гц
Рис. 1. Схематическое представление основных типов резонансов НЧИ
Рис. 2. Чувствительность по напряжению излучателя типа БиконТМ
Таким образом, разработка многополосных электрических эквивалентов НЧИ является
необходимым этапом в процессе создания мощных излучающих систем.
Многополосные электрические эквиваленты. Для создания модели многополосного
электрического эквивалента излучателя целесообразно использовать несколько независимых
колебательных контуров. Введение нескольких резонансных цепей во вторичные обмотки
согласующих трансформаторов обеспечивает гальваническую развязку колебательных систем и
позволяет моделировать системы, имеющие сложные АЧХ. Однако следует учитывать наряду с
уровнем подводимой электрической мощности, что параллельно-последовательное соединение
резонансных цепей без ослабления взаимных связей фактически сводится к одному
обобщённому колебательному контуру. Для устранения этого эффекта в ИПФ РАН разработана
модель двухдиапазонного электрического эквивалента для моделирования нескольких
колебательных систем мощного НЧИ со сложным импедансным спектром.
Имитация излучения на макете двухполосного электрического эквивалента. Для
проверки возможности имитации излучения гидроакустических сигналов с учётом развиваемой
акустической мощности на уровне нескольких сотен ватт разработан макет эквивалента НЧИ с
рабочими частотами 340 и 580 Гц (рис. 3).
При относительной ширине нижней и верхней полосы частот соответственно 40 % и 30 %,
рабочий диапазон частот эквивалента составляет 375 Гц (от 275 до 650 Гц). Такие параметры
выбраны на основе электроакустических измерений НЧИ (рис. 2) типа БиконТМ. Резистивные
элементы суммарной мощностью около 350 Вт располагались на алюминиевых радиаторах
общей площадью рассеяния примерно 6000 см2.
107
Гидроакустические системы
Рис. 3. Реальная часть импеданса электрического эквивалента мощного НЧИ
Рис. 4. Спектр сигнала с бинарно изменяющейся фазой
Рис. 5. Эффективные значения напряжения и тока на эквиваленте в режиме
имитации излучения гидроакустических сигналов с изменяющейся фазой
Для имитации излучения гидроакустичесчких сигналов использованы псевдослучайные
последовательности, ЛЧМ-сигналы и сигналы с фазовой модуляцией. Пример спектра
амплитуды сигнала с бинарно изменяющейся фазой, подаваемого на систему возбуждения для
имитации излучения гидроакустических сигналов с использованием макета эквивалента НЧИ,
представлен на рис. 4.
В режиме имитации излучения сигналов с бинарно изменяющейся фазой на несущей
частоте 400 Гц, шириной полосы 25 Гц и скважностью 1,25 (и менее) эффективное значение
напряжения на макете эквивалента НЧИ составляло около 400 В, средний уровень тока
(эффективное значение) находился в пределах 2,5−2,7 А (рис. 5), а пиковая электрическая
мощность достигала 0,5−0,8 кВт.
Подобные уровни тока и напряжения означают, что макет эквивалента обладает
достаточной электрической прочностью для имитации излучения гидроакустических сигналов
при помощи НЧИ, аналогичного приведённому в работе [5] с чувствительностью по напряжению
9−10 Па·м/В и КПД около 70 % со средним уровнем акустической мощности не менее
150−200 Вт.
Заключение. Эксперименты, проведенные с макетом двухполосного электрического
эквивалента мощного НЧИ, показали возможность моделирования сложных импедансных
спектров и технической реализации таких изделий «в железе».
108
Гидроакустические системы
Литература
1. Woolet R. Sonar Transducer Fundumentals. Newport – New London: Naval Underwater Systems
Center, 1986.
2. Свердлин Г.М. Гидроакустические преобразователи и антенны. JI.: Судостроение, 1980.
3. Chen Y.C., Wu S., Chen P.C. The impedance-matching design and simulation on high power electroacoustical transducer // Sens. Actuators A Phys. 2004. Vol. 115, № 1. P. 38–45.
4. Боголюбов Б. Н., Кирсанов А. В., Леонов И. И., Смирнов C. А., Фарфель В. А. Расчёт и
экспериментальные
исследования
компактного
продольно-изгибного
гидроакустического
преобразователя с центральной частотой излучения 520 Гц // Гидроакустика. 2015. № 23(3). С. 20−26.
5. Боголюбов Б. Н., Бритенков А. К., Кирсанов А. В., Перфилов В. А., Смирнов C. А., Фарфель В. А.
Согласование низкочастотного импеданса системы возбуждения гидроакустического излучателя высокой
мощности с электромеханическим преобразователем на основе пьезокерамического активного элемента //
Тр. II Российско-белорусской научн.-технич. конф. «Элементная база отечественной радиоэлектроники:
импортозамещение и применение» им. О. В. Лосева. Нижний Новгород. 2015. С. 361–365.
Работа выполнена в рамках госзадания ИПФ РАН «Распространение акустических волн в морской
среде и верхнем слое земной коры» (проект FFUF-2024-0041).
109
Гидроакустические системы
КЛЮЧЕВЫЕ ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СЕТЕВОЙ
ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ СВЯЗИ
Д. А. Блинов
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
KEY FEATURES OF DESIGN OF NETWORK UNDERWATER COMMUNICATION
SYSTEM
D. A. Blinov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Рассматриваются вопросы проектирования сетевой гидроакустической системы. Обозначены
ключевые проблемы, возникающие в процессе проектирования подобных систем в части
моделирования работы системы и стека протоколов информационного обмена, предложены способы
их решения. Результаты, приведенные в данной статье, могут быть применены при разработке
технологии сетевой гидроакустической системы.
Questions of design of network underwater system communication are considered. The key problems arising
in the course of design of similar systems regarding modeling of work of system and stack of protocols of
information exchange are designated, ways of their solution are proposed. The results given in this article can
be applied when developing technology of network underwater sound system.
Развитие современной гидроакустики с применением многофункциональных
комплексов связи требует обеспечение стабильного информационного обмена между
множеством абонентов разного класса, выполняющих задачи различной сложности и
конфиденциальности [1]. В зависимости от поставленной задачи абонента технические
характеристики (ТХ) оборудования гидроакустической связи будут отличаться.
Взаимодействие между абонентами разного класса вызывает определенные требования к
системе в части обеспечения заданных дальностей в сеансе связи, регламентирования
информационного протокола и при проектировании заставляет учитывать ряд технических
вопросов, обозначенных в данной работе.
Обобщённая схема разработки модели системы. Параметры сетевой
гидроакустической коммуникационной системы (СГКС) могут отличаться ввиду
батиметрических или гидрологических особенностей акватории (рельеф дна, распределение
скорости звука, солёность и температура в слое среды и т.д.) [2, 3]. Топология СГКС
(размещение гидроакустических буёв) для разных типов акватории изменяется, чтобы
обеспечить устойчивый информационный обмен между узлами сети. На рис. 1 приведена
обобщенная схема разработки модели СГКС, в которой отражены основные компоненты,
учитываемые на стадии проектирования СГКС.
СГКС регламентируется в первую очередь поставленными задачами и тактикой
применений (исследование подводных месторождений, поисково-разведывательные
операции, контролирование акватории). Для каждой из задач состав СГКС будет отличаться.
На основании задач формулируются требования к системе для достижения поставленных
целей. Разработчики системы должны учитывать и исследовать свойства акватории, в которой
планируется размещение СГКС, и по результатам выбора акватории определить режимы
гидроакустической связи и приборный состав.
Отсутствие анализа батиметрических и гидрологических свойств акватории может
привести к невозможности установки стабильного сеанса гидроакустической связи вне
зависимости от типа гидроакустических антенн в приборном составе. По результатам выбора
режимов гидроакустической связи и приборного состава необходимо выполнить
моделирование работы системы с имитацией гидроакустического канала.
В блоке моделирования работы системы предлагается определять топологию СГКС,
формировать и обрабатывать сигналы, планируемые к использованию в режиме
гидроакустической связи, определять и тестировать стек сетевых протоколов (например,
маршрутизация и ретрансляция). Выходом блока моделирования непосредственно являются
характеристики СГКС выбранной конфигурации.
110
Гидроакустические системы
Разработка
модели СГКС
Тактика
применения
Требования к
системе
Среда
Выбор акватории
Батиметрические
данные
Выбор режимов
связи
Гидрологические
данные
Выбор приборного
состава
Моделирование
работы системы
Имитация канала
Соответствие
требованиям
нет
да
Параметры
СГКС
Рис. 1. Разработка модели СГКС
Блок имитации канала в СГКС представляет собой оценку импульсной реакции канала
для каждого абонента СГКС при моделировании работы системы. В условиях
неоднородности водной среды блок имитации канала может быть представлен, как
фактическим результатом оценки импульсной реакции канала из натурного эксперимента, так
и моделированием канала с учётом батиметрических и гидрологических данных акватории.
Стек протоколов информационного обмена. В условиях устойчивого развития рынка
необитаемых и обитаемых подводных аппаратов возникает проблема взаимодействия
внешних абонентов разного класса в СГКС и разработки стека протоколов информационного
обмена.
В СГКС для каждого из уровней модели, приведённых на рис. 2, разрабатывается свой
протокол информационного обмена. Разработка стека протоколов информационного обмена
для каждого внешнего абонента приводит к пропорциональному увеличению протоколов
обмена в зависимости от количества внешних абонентов. Разработка стека протоколов
информационного обмена по единому образцу позволит минимизировать временные затраты
на обеспечение совместимости между СГКС и внешним абонентом. Обозначенный стек
протоколов должен учитываться, как разработчиком СГКС, так и разработчиком внешнего
абонента (подводного аппарата).
111
Гидроакустические системы
Уровень приложений
Вывод данных
пользователю
Уровень представлений
Форматирование
данных для вывода
Сеансовый
Сеансовый уровень
уровень
Идентификация и
установка соединения
Транспортный уровень
Сегментирование
данных
Сетевой уровень
Маршрутизация
Канальный уровень
Обнаружение пакета
данных
Физический уровень
Обработка сигнала
Событие
Рис. 2. Пример сетевых уровней в СГКС в режиме приёма сообщения
Вывод. Обозначенные технические вопросы необходимо учитывать на стадии
проектирования СГКС для предотвращения непредвиденных ситуаций в процессе
эксплуатации. Указанные технические решения могут быть использованы разработчиками и
конструкторами, позволяют существенно упростить проектирование СГКС в части
разработки модели СГКС и стека протоколов информационного обмена.
Литература
1. Бобрышев С. В., Поленин В. И. Сетевая модель подводной сетецентрической системы
наблюдения с пассивными датчиками // Науч. журнал «Евразийский Союз Учёных». 2015. № 7.
С. 93−97.
2. Кебкал К. Г., Кебкал В. К., Кебкал А. Г. Цифровые гидроакустические сети для связи в
условиях длительных задержек и разрывов соединения: экспериментальное исследование // Подводные
исследования и робототехника. 2015. № 2. С. 12−19.
3. Кебкал К. Г., Машошин А. И., Мороз Н. В. Пути решения проблем создания сетевой
подводной связи и позиционирования // Гироскопия и навигация. 2019. Т. 27, № 2. С. 106−135.
112
Гидроакустические системы
МОДЕЛИРОВАНИЕ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ И ПОМЕХ
ДЛЯ ОТРАБОТКИ СРЕДСТВ ЗВУКОПОДВОДНОЙ СВЯЗИ
А. А. Скорынин, канд. физ.-мат. наук, С. Э. Григас, канд. физ.-мат. наук
АО «Корпорация «Комета», Москва, Россия
SIMULATION OF HYDROACOUSTIC SIGNALS AND INTERFERENCES
FOR UNDERWATER COMMUNICATION SYSTEMS DEVELOPMENT
A. A. Skorynin, Ph.D., S. E. Grigas, Ph.D.
JSC «Corporation «Kometa», Moscow, Russia
В работе рассмотрена задача формирования гидроакустических сигналов и помех для отработки
приемных средств звукоподводной связи в стендовых условиях. Для её решения предложена
математическая модель, описывающая формирование сигналов, их распространение в пространственнонеоднородной среде и прием на фоне шумов и помех. Рассмотрены особенности многолучевого
распространения таких сигналов, приводящего к замираниям и межсимвольной интерференции, а также
движение абонентов, вызывающее доплеровский сдвиг частоты сигнала. Представлены результаты
имитации сигналов для нестационарных гидроакустических каналов на фоне шумов, узкополосных и
импульсных помех.
The paper addresses the problem of generating hydroacoustic signals and interferences for testing underwater
acoustic communication receivers in laboratory conditions. A mathematical model to solve this problem is
proposed. This model describes the signal generation, it’s propagation in spatially inhomogeneous media, and
reception in the presence of noise. The peculiarities of signals multipath propagation, leading to fading and intersymbols interference, the movement of receiver and transmitter causing Doppler frequency shift of the signal are
considered. The results of signal simulation for non-stationary hydroacoustic channel in the presence of noise,
narrowband and impulse interferences are presented.
Сложность создания современных комплексов звукоподводной связи (ЗПС), особенно с
большой
дальностью
действия,
обусловлена
особенностями
распространения
гидроакустических сигналов в пространственно-неоднородной и нестационарной среде
Мирового океана, а также воздействием на приемную аппаратуру разнообразных шумов и помех
морской среды природного и антропогенного происхождения.
Для преодоления указанных проблем широко применяют методы математического
моделирования. Существующие модели распространения гидроакустических сигналов в
лучевом приближении [1] позволяют по известным характеристикам среды распространения
спрогнозировать параметры канала между абонентами ЗПС. Эти модели позволяют оценить
уровень переданного сигнала и степень его искажения, вызванного многолучевым
распространением и приводящего к частотно-селективным замираниям и межсимвольной
интерференции в сигнале, в том числе при наличии движения абонентов [2].
В диапазоне средних частот помеховую обстановку на входе приемной аппаратуры ЗПС
можно представить в виде суммы шумов морской среды и помех различной природы.
Распределение амплитуды шумов морской среды хорошо аппроксимируется нормальным
законом, а для описания помех используются более сложные законы, параметры которых в
значительной степени зависят от акватории и вида помехи [3].
При разработке алгоритмов формирования и обработки сигналов в комплексах ЗПС
необходимо учитывать перечисленные особенности сигнально-помеховой обстановки. С учетом
сложности и стоимости проведения испытаний аппаратуры ЗПС в морских условиях проверку
правильности выбора и реализации алгоритмов целесообразно проводить прежде всего в
стендовых условиях. Для проведения этой отработки сигналы и помехи предлагается
имитировать с использованием математических моделей, представленных в следующем разделе.
Модели формирования гидроакустического сигнала и помех. Рассмотрим
гидроакустический канал между источником с координатами ρи и приемником ρп ,
движущимися в неизменной «замороженной» среде. Решая волновое уравнение в лучевом
приближении, как описано в работах [1, 2], можно получить, что принятый сигнал представляет
собой сумму сигналов, соответствующих отдельным лучам:
113
Гидроакустические системы
S п ( t ) ∑S п m ( t + τ m* ( t ) ) ,
=
N
(1)
m =1
где N — число лучей, соединяющих точки фазовых центров передающей и приемной антенн; Snm
— принятый сигнал m-го луча, который при скоростях движения абонентов много меньше
скорости звука описывается следующим уравнением:
)
(
Sп m ( t +=
τ m* ( t ) ) am ρи ( t ) , ρп ( t + τ m* ( t ) ) ⋅ Sи ( t ) ,
(2)
am — комплексная нормированная амплитуда m-го луча; Sи — излученный сигнал;
τ m* — время распространения сигнала по m-му лучу с учетом изменения расстояния между
излучателем и приемником.
С использованием (1) и (2) по характеристикам лучей am , τ m* и излученному сигналу Sи
может быть рассчитан принятый сигнал Sп.
Шум морской среды в приемной антенне Nn сформируем как случайный процесс с
нормальным распределением. При наличии данных об излучаемых помеховых сигналах Jи, их
реализации на входе приемника могут быть получены с использованием модели, описанной
выше.
Результаты моделирования. Для иллюстрации предложенного подхода к формированию
сигналов и помех рассмотрим пример ситуации, показанной на рис. 1, когда в районе
присутствуют источник и приемник сигнала ЗПС, а также источники импульсных и тоновых
помех.
Расчет характеристик гидроакустических лучей проводился для условий глубокого моря с
подводным звуковым каналом. Импульсные характеристики каналов (ИХК) содержали лучи с
задержками, различающимися на время до 3,5 секунд.
Источники сигналов считались неподвижными, а приемник двигался со скоростью 10 м/с,
что приводило к изменению ИХК во времени. Излучаемый сигнал ЗПС Su содержал три импульса
ФМ-сигнала на несущей частоте 1,8 кГц. Рассчитанный в соответствии формулой (1) сигнал Sп
расплывался во времени и приобретал амплитудную модуляцию и доплеровский сдвиг частоты.
Аналогичным образом искажались импульсная помеха J1 с длительностью импульса 1 мс и
периодом повторения 4 с и тоновая помеха J2. В приемнике сигнал и помехи складывались
вместе с шумом морской среды (рис. 2).
Рис. 1. Схема размещения абонентов ЗПС и источников помех
в районе, при котором проводится моделирование
114
Гидроакустические системы
Рис. 2. Формирование сигнала ЗПС в приемнике на фоне шумов и помех
Поскольку в формуле (2) характеристики лучей am и τ m* меняются относительно
медленно, их строгий расчет достаточно проводить с периодом времени порядка 1 секунды, а
промежуточные значения определять методом линейной интерполяции. Это позволяет
существенно сократить вычислительную сложность данного метода и проводить расчёты на
современном компьютере в режиме времени близком к реальному.
Варьируя переменные параметры среды и характеристики помех, этим способом может
быть сформирована библиотека записей сигналов. Подавая на приемник ЗПС или его
программный макет записи из библиотеки и регистрируя результаты приема, можно получить
адекватную оценку характеристик их работы до выхода на испытания в морских условиях.
Литература
1. Бреховских Л. М. Волны в слоистых средах. Москва: Наука, 1973.
2. Калюжный А. Я. Лучевое представление поля эхолокационных сигналов в слоистонеоднородной среде при сложном движении приемно-излучающих антенных систем / Акустический
журнал. 1994. Т. 40, № 4.
3. Amale V. S., Kolhar S. U., Shastri R. K., Das A. Non-Gaussianity and Non-Stationarity Detection in
Underwater Ambient Noise using Hypothetical Tests // Conference on Advances in Signal Processing. Pune. 2016.
115
Гидроакустические системы
МЕТОД СОВМЕСТНОГО ДЕКОДИРОВАНИЯ ПОВТОРОВ СООБЩЕНИЯ,
ЗАКОДИРОВАННОГО КОДОМ РИДА-СОЛОМОНА, ПЕРЕДАВАЕМОГО
ПО ГИДРОАКУСТИЧЕСКОМУ КАНАЛУ В КОМПЛЕКСАХ ЗВУКОПОДВОДНОЙ
СВЯЗИ
Д. А. Крестовских, Е. А. Марычев, М. В. Чекмарев, канд. техн. наук
АО «Корпорация «Комета», Москва, Россия
METHOD OF COLLABORATIVE DECODING OF REPEATS OF A MESSAGE
ENCODED BY THE REED-SOLOMON CODE AND TRANSMITTED
VIA A HYDROACOUSTIC CHANNEL IN UNDERWATER COMMUNICATION
COMPLEXES
D. A. Krestovskikh, E. A. Marychev, M. V. Chekmarev, Ph.D.
JSC «Corporation «Kometa», Moscow, Russia
Предложен метод совместного декодирования нескольких повторов сообщения, закодированного
помехоустойчивым кодом Рида-Соломона. Для предложенного метода по результатам
математического моделирования получены вероятностные характеристики декодера для различных
длин блока кода Рида-Соломона и расстояний между кодовыми словами.
The method of collaborative decoding of several repeats of a message encoded by the Reed-Solomon
noise-resistant code is proposed. For the proposed method, using the results of mathematical modeling, the
probabilistic characteristics of the decoder for various lengths of the Reed-Solomon code block and the distances
between code words are obtained.
Введение. В настоящее время все большее применение находят комплексы дальней
звукоподводной связи. Для достижения высокой эффективности применения таких комплексов
необходимы сигнально-кодовые конструкции (СКК), позволяющие передавать сообщения на
большие расстояния в сложных помеховых условиях. При синтезе таких СКК применяются
помехоустойчивые коды, одним из разновидностей которых является код Рида-Соломона
(далее — РС код) [1−3]. Одновременно для повышения вероятностных характеристик приема
сообщения сигнал, содержащий это сообщение, передается несколько раз. С учетом
вышесказанного возникает задача совместного декодирования повторов сообщения. В настоящей
статье предложен метод совместного декодирования повторов сообщения, закодированного РС
кодом, и показаны вероятностные характеристики декодера, полученные по результатам
математического моделирования.
Постановка задачи. Пусть принято R повторов сигнала, содержащего одинаковое
сообщение, закодированное систематическим расширенным РС кодом над полем Галуа GF (2m).
Структура сигнала представлена на рис. 1. Каждый повтор сообщения представлен в виде кодовых
символов (далее КС) — элементов поля Галуа, над которыми проводятся операции при
декодировании РС кодов. Блок КС на входе декодера именуется кодовым словом (далее — КСл),
состоящим из информационных и проверочных КС. Длина КСл обозначается n , а количество
информационных КС в нем — k . Код Рида-Соломона обозначается как РС ( n, k ) код, а расстояние
между КС определяется по формуле d = n − k + 1 . Задача совместного декодирования (далее — СД)
R повторов одного и того же сообщения заключается в декодировании этого сообщения с
использованием информации, содержащейся в каждом повторе. В статье рассмотрены РС коды над
полем Галуа GF (2m) для m = 4 и m = 5 . При этом последний (16-й или 32-й) КС кодового слова
используется в качестве контрольной суммы для информационных КС.
116
Гидроакустические системы
Рис. 1. Структура сигнала
Описание метода совместного декодирования повторов сообщения, закодированного
РС кодом. Предложенный метод СД заключается в следующем:
а) представим R повторов принятого сообщения как массив
ks11
D=
ks1R
... ks1n
,
... ksRn
где ksij — j -ый КС i -ого повтора сообщения;
б) по каждому столбцу массива D проводится посимвольное мажорирование КС, то есть
выбирается тот КС, который был принят большее количество раз. Этот КС записывается в
остальные строки j -ого столбца массива D , а в случае, если провести мажорирование
невозможно, то j -ый столбец остается без изменений;
в) выполняется декодирование КСл каждого повтора сообщения, представленного
соответствующей строкой массива D с использованием стандартного декодера РС кодов [1−3].
В ходе исправления ошибок может быть сформирован признак «отказа от декодирования»,
который показывает, что декодер не смог декодировать сообщение по одной из следующих
причин: 1) количество обнаруженных ошибок превышает количество ошибок, исправляемых РС
кодом; 2) после декодирования и повторной проверки получен ненулевой синдром, что
сигнализирует о наличии ошибок в КСл;
г) после декодирования КСл проверяется его контрольная сумма путем сравнения суммы
информационных КС после декодирования с последним КС кодового слова для каждого повтора;
д) выполняется повторное мажорирование КС по всем повторам аналогично
перечислению б), но выбирается только один КС. Если провести мажорирование невозможно, то
выбирается КС, который соответствует тому повтору, для которого выполнено одновременно два
условия: не было «отказа от декодирования» и контрольная сумма успешно проверена. Если такие
повторы сообщения отсутствуют, то проверяется выполнение хотя бы одного условия, иначе
выбирается случайный КС. В результате формируется одно полное КСл, которое повторно
декодируется стандартным декодером РС кодов с отбрасыванием проверочных КС.
В следующем разделе показаны результаты математического моделирования с
использованием предложенного метода.
Вероятностные
характеристики
декодера,
полученные
по
результатам
математического моделирования. Для оценки эффективности предложенного метода СД было
проведено математическое моделирование, результаты которого представлены на рис. 2.
Моделирование заключалось в сравнении вероятностных характеристик декодера СД (сплошная
линия на графике) с характеристиками стандартного декодера РС кодов [1−3] и независимом
декодировании (НД) повторов, при котором вероятность ошибки на выходе декодера
рассчитывалась как вероятность правильного декодирования хотя бы одного повтора сообщения
(пунктирная линия на графике). Характеристики декодеров представлены как зависимости
вероятности ошибки в сообщении на выходе декодера (Pош.сообщ) от вероятности ошибки в КС на
входе декодера (Pош.симв).
117
Гидроакустические системы
а
б
Рис. 2. Сравнение характеристик декодера для СД и стандартного декодера для НД повторов
а — для РС кодов над полем GF (24); б — для РС кодов над полем GF (25)
Рис. 3. Минимальный выигрыш от применения совместного декодирования
Количество повторов при моделировании было принято равным трем. При проведении
моделирования были рассмотрены следующие РС коды: 1) коды над полем Галуа GF (24):
РС (16,11) d = 6 , РС (16,9) d = 8 , РС (16,7) d = 10 ; 2) коды над полем Галуа GF (25): РС (32,27)
d = 6 , РС (32,23) d = 10 , РС (32,15) d = 18 .
Для численной оценки выигрыша, достигаемого при применении совместного
декодирования повторов сообщения, значения Pош.симв на входе декодера были пересчитаны в
отношение энергии бита к спектральной плотности мощности шума (Eb/N0) для СКК,
построенной с применением РС кода и бинарной фазовой манипуляции (BPSK) и передаваемой по
каналу с аддитивным белым гауссовым шумом. В качестве помехоустойчивого кода был
рассмотрен РС код (32,23). Длина передаваемого сообщения равнялась k ⋅ m бит, что
соответствует передаче одного КСл. Был найден минимальный выигрыш от применения СД, как
минимальное значение разницы между Eb/N0 при НД повторов и Eb/N0 при СД повторов по всем
значениям вероятности ошибки в сообщении (Pош.сообщ). Результаты моделирования
представлены на рис. 3.
Выводы по результатам математического моделирования декодера совместного
декодирования. Как видно по приведенным графикам, предложенный метод совместного
декодирования позволяет получить выигрыш при количестве повторов больше двух. Так, при
передаче СКК на основе РС кода (32,23) и BPSK модуляции при применении совместного
декодирования повторов относительно их независимого декодирования минимальный выигрыш
по требуемому Eb/N0 составляет ≈1,5 дБ для трех повторов, а для пяти повторов ≈3,3 дБ. Наличие
выигрыша от применения предложенного метода совместного декодирования позволяет говорить
о целесообразности его применения при декодировании повторов сообщений.
118
Гидроакустические системы
Литература
1. Скляр Б. Цифровая связь. Теоретические основы и практическое применение, 2-е издание. М.:
Издательский дом «Вильямс», 2003. 1014 с.
2. Трифонов П. В. Основы помехоустойчивого кодирования. СПб: Университет ИТМО, 2016. 231 с.
3. Дружинин В. И., Кузьмин О. В. Коды-Рида-Соломона в системах обнаружения и исправления
ошибок при передаче данных // Современные технологии. Системный анализ. Моделирование. 2015.
№ 1(45). С. 116–124.
119
Гидроакустические системы
МЕТОД ОБНАРУЖЕНИЯ ФАЗО-КОДО-МАНИПУЛИРОВАННОГО СИГНАЛА
В МНОГОЛУЧЕВОМ ГИДРОАКУСТИЧЕСКОМ КАНАЛЕ СВЯЗИ ПРИ НАЛИЧИИ
В НЕМ ИМПУЛЬСНЫХ ПОМЕХ
А. А. Скорынин, канд. физ.-мат. наук, В. А. Телицын, Д. А. Крестовских, Е. А. Марычев,
М. В. Чекмарев, канд. техн. наук, С. Э. Григас, канд. физ.-мат. наук
АО «Корпорация «Комета», Москва, Россия
METHOD OF PHASE-CODE-KEYED SIGNAL DETECTION IN MULTIPATH
HYDROACOUSTIC COMMUNICATION CHANNEL AFFECTED BY IMPULSIVE NOISE
A. A. Skorynin, Ph.D., V. A. Telitsyn, D. A. Krestovskikh, E. A. Marychev, M. V. Chekmarev, Ph.D.,
S. E. Grigas, Ph.D.
JSC «Corporation «Kometa», Moscow, Russia
Рассмотрен метод и алгоритм обнаружения многолучевого фазо-кодо-манипулированного
гидроакустического пилот-сигнала, принимаемого на фоне импульсных помех. Представлены кривые
обнаружения пилот-сигнала, полученные по результатам моделирования с использованием
предложенного алгоритма.
Method and algorithm for detecting a multipath phase-code-keyed hydroacoustic pilot-signal against a
background of impulsive noise are considered. The pilot-signal detection curves obtained from simulation results
using the proposed algorithm are presented.
В гидроакустических системах связи перед началом передачи информации для
установления частотно-временной синхронизации излучается пилот-сигнал (ПС) —
специальный сигнал, форма которого априори известна на приемной стороне [1]. Классическим
методом обнаружения ПС является применение согласованного с излученным сигналом фильтра
и детектора, выделяющего огибающую. Максимум огибающей затем сравнивается с
установленным порогом обнаружения [2]. При таком методе предполагается, что принимаемый
пилот-сигнал является однолучевым, а фоновый шум — белым гауссовским.
В то же время в реальных условиях сигнал в точке приема является многолучевым. При
этом акустический шум, на фоне которого принимается такой многолучевой сигнал, может
содержать короткие импульсы большой амплитуды, что вызвано, например, торошением льда
или техногенными помехами.
Указанные особенности сигнала, принимаемого в реальных условиях, не рассматриваются
в классическом методе обнаружения, в связи с чем его применение на практике может не
обеспечивать достижения требуемых вероятностных характеристик приема.
В настоящей работе предложены метод и алгоритм, позволяющие учесть многолучевую
структуру принимаемого сигнала и минимизировать влияние импульсных помех на
вероятностные характеристики его обнаружения.
Постановка задачи обнаружения. Пусть излучается ПС, манипулированный по фазе
псевдослучайной последовательностью, на несущей частоте f 0 . Обозначим дискретные отсчеты
его комплексной огибающей как rm , m = 1,..., M . Будем считать, что принимаемый ПС,
прошедший гидроакустический канал, состоит из L ортогональных многолучевых компонент.
Задачу обнаружения такого ПС удобно сформулировать в терминах проверки
статистических гипотез. Подлежит проверке гипотеза, согласно которой дискретные отсчеты
принятой реализации xn , n = 1,..., N , N > M , содержат только акустический шум.
Альтернативной является гипотеза, согласно которой отсчеты xn содержат смесь многолучевого
ПС и акустического шума. Амплитуды, начальные фазы, задержки и количество многолучевых
компонент L считаются неизвестными с неизвестным законом распределения и неизменными
на интервале наблюдения. Доплеровское изменение масштаба времени сигнала предполагается
пренебрежимо малым.
Для описания акустического шума будем считать, что он состоит из фоновой компоненты,
описываемой моделью белого гауссовского шума, и коротких импульсных помех,
120
Гидроакустические системы
присутствующих в отдельных отсчетах.
Метод и алгоритм обнаружения. Предлагаемый метод обнаружения многолучевого ПС
основан на применении статистики вида
2
1 M +k
T (y , L) =
I ( y , nl ) − θ L max I ( y , nl ) , I ( y , k ) =
yn rn − k ei 2π f0 ( n −1)/ f s , (1)
∑
2 ∑
l =1,..., Lmax
M σ n= k +1
l= 1
L
где y = ( y1 ,..., y N ) — отсчеты принятой реализации после режекции импульсных помех; σ 2 —
дисперсия шума после режекции импульсных помех; Lmax — максимальное ожидаемое
количество многолучевых компонент; nl — оценки задержек многолучевых компонент по
максимуму правдоподобия (в отсчетах); θ > 0 — параметр; f s — частота дискретизации;
k ∈ [0; N − M ] — значение сдвига.
Указанная статистика представляет собой разность логарифма отношения правдоподобия
(ОП), рассматриваемого от отсчетов y, и случайной штрафной функции [3], компенсирующей
рост логарифма ОП с увеличением количества многолучевых компонент. Вместо неизвестных
амплитуд, задержек и начальных фаз многолучевых компонент в логарифме ОП используются
их оценки по максимуму правдоподобия.
Далее будем предполагать, что известна оценка дисперсии шума σ 2 . Она может быть
получена, например, с использованием метода, предложенного в [1].
Решение об обнаружении ПС принимается, если
max T ( y , L ) > h,
L =1,..., Lmax
где h — порог, выбираемый исходя из заданной вероятности ложной тревоги.
Алгоритм, реализующий указанный метод, состоит в следующем.
1) Осуществляется режекция импульсных помех. Для этого рассчитывается величина
(
N
)
β = ∑ xn2 / N . Отсчетам, модуль которых больше max 3 β , 2β Lmax N / M , присваивается
n =1
нулевое значение. Результатом являются отсчеты y .
2) Вычисляются
значения
I ( y , s∆ )=
, s 0,..., ( N − M ) / ∆
с
заданным
шагом
сдвига ∆ . Из них отыскиваются Lmax наибольших элементов, относительные задержки между
которыми больше времени корреляции ПС. Они соответствуют значениям I ( y , nl ) , l = 1,..., Lmax
. Далее вычисляются T ( y , L ) , L = 1,..., Lmax .
3) Производится сравнение величины max T ( y , L ) с порогом h , в случае превышения
L =1,..., Lmax
которого принимается решение об обнаружении ПС.
Оценка эффективности метода. Для оценки эффективности предложенного метода было
проведено моделирование с использованием приведенного выше алгоритма, программно
реализованного в среде MATLAB. В качестве излучаемого ПС использовался сигнал,
манипулированный по фазе M-последовательностью с периодом 511 символов, на несущей
частоте f 0 = 1800 Гц. Частота следования символов f c = 1/ Tc =120 Гц. Принимаемый сигнал
формировался как сумма четырех многолучевых компонент равной амплитуды, три из которых
задержаны относительно первой компоненты на 3Tc , 5Tc и 7Tc . Частота дискретизации
равнялась f s =12 кГц.
121
Гидроакустические системы
Рис. 1. Кривые обнаружения. Вероятность ложной тревоги 10-3
Для имитации акустического шума и импульсных помех в нем использовалась модель
негауссовского шума, отсчеты которого являются попарно независимыми и распределены в
соответствии с плотностью вероятности
p (σ w2 , σ g2 ) =
0,99 N ( 0, σ w2 ) + 0, 01N ( 0, σ g2 ) , σ g2 / σ w2 =
50,
(2)
где N (α , γ ) обозначает гауссовскую плотность вероятности с математическим ожиданием α и
дисперсией γ .
Второе слагаемое в выражении (2) обуславливает появление в реализации шума
высокоамплитудных отсчетов с уровнем, значительно превосходящим σ w . Такие отсчеты
моделируют короткие импульсные помехи в акустическом шуме.
Длительность реализации, подаваемой на вход алгоритма, составляла 523Tc , что на 0,1 с
больше длительности пилот-сигнала. В качестве параметров алгоритма были использованы
следующие: θ = 0, 2 , Lmax = 5 , ∆ = f sTc / 2 .
На рис. 1 представлены зависимости вероятности обнаружения пилот-сигнала от
отношения его энергии к спектральной плотности мощности шума (далее — ОСШ), полученные
по результатам 1000 сеансов моделирования для предложенного метода (без режекции и с
режекцией импульсных помех) и классического метода.
Заключение. Таким образом, для условий моделирования предложенный метод
обеспечивает выигрыш по ОСШ относительно классического метода на значение около 3 дБ для
вероятности обнаружения, равной 0,7. Из них выигрыш 1,2 дБ достигается за счет применения
многолучевой обработки сигнала, а около 1,8 дБ — за счет режекции импульсных помех. Это
позволяет говорить об эффективности метода для обнаружения пилот-сигнала в многолучевом
канале на фоне импульсных помех и целесообразности его применения при обработке сигналов
в реальных условиях.
Литература
1. Бобровский И. В. Метод обнаружения синхросигнала в многолучевом гидроакустическом канале
// Гидроакустика. 2017. № 31(3). С. 38-46.
2. Левин Б. Р. Теоретические основы статистической радиотехники. М.: Советское радио, 1968.
3. Трифонов А. П., Харин А. В., Чернояров О. В. Оценка числа ортогональных сигналов с
неизвестными параметрами // Радиотехника и электроника. 2016. Т. 61, № 9. С. 878−885.
122
Гидроакустические системы
ФОРМИРОВАНИЕ ЛЕПЕСТКА ДИАГРАММЫ НАПРАВЛЕННОСТИ
ПРИЕМНОЙ АНТЕННЫ В ПОДВОДНОМ ЗВУКОВОМ КАНАЛЕ
А. Л. Вировлянский, д-р физ.-мат. наук, А. Ю. Казарова, канд. физ.-мат. наук
Институт прикладной физики РАН, Нижний Новгород, Россия
FORMATION OF A RECEIVING ANTENNA DIRECTIVITY PATTERN
LOBE IN AN UNDERWATER ACOUSTIC WAVEGUIDE
A. L. Virovlyansky, Dr.Sc., A. Yu. Kazarova, Ph.D.
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Обсуждается обобщение классической процедуры формирования лепестка диаграммы направленности
приемной антенны в однородном пространстве на случай вертикальной антенны в подводном
акустическом волноводе. Обобщение выполняется на основе перехода от традиционного представления
регистрируемого поля в виде суперпозиции плоских волн, к использованию заимствованного из квантовой
механики разложения поля по когерентным состояниям. Использование данного разложения позволяет
выделять вклады узких пучков лучей, формирующих компоненты поля относительно устойчивые к
вариациям параметров среды. Этот подход может быть применен при решении задачи локализации
источника.
A generalization of the classical procedure for forming a lobe of a receiving antenna's directivity pattern in a
homogeneous medium to the case of a vertical antenna in an underwater acoustic waveguide is considered. The
generalization is carried out on the basis of a transition from the traditional representation of the registered field
in the form of a superposition of plane waves, to the use of the expansion of the field into coherent states,
borrowed from quantum mechanics. The use of this decomposition makes it possible to isolate the contributions
of narrow beams of rays that form field components that are relatively stable to variations in environmental
parameters. This approach can be applied to solving the problem of source localization.
Классический метод формирования лепестка диаграммы направленности приемной
антенны предполагает, что выделяемая компонента регистрируемого поля представляет собой
фрагмент плоской волны, отвечающий приходу пучка параллельных лучей (рис. 1, а) [1]. Этой
компоненте поля на апертуре антенны отвечает пространственная частота κα = k sin α , где k —
волновое число, а α — угол падения пучка. Формирование лепестка осуществляется путем
пространственной фильтрации принятого поля в полосе κα ± 2π / L , где L — длина антенны.
Фильтр «пропускает» сигналы, пришедшие от нужного источника, и «отсекает» сигналы с
других направлений.
Рис.1. Антенна в свободном пространстве
а — пучок параллельных лучей, падающий на антенну; б — сегмент лучевой линии и размытый сегмент
(область, выделенная серым цветом), отвечающие пучку
123
Гидроакустические системы
Рис. 2. Примеры пучков лучей в глубоком море, которые выходят из точечного источника S
и попадают на апертуру вертикальной антенны
Рис. 3. Лучевая линия и размытая лучевая линия
на дистанции 30 км от источника
Лучевая линия — тонкая кривая; размытая лучевая линия — область, выделенная серым цветом;
пунктирные линии обозначают глубины краев антенны
В работе рассматривается обобщение данного метода на случай подводного звукового
канала, в котором имеет место многолучевое распространение и поле на антенне формируется
несколькими пучками лучей. Принципиальный момент заключается в том, что лучи, образующие
отдельный пучок, как правило, не параллельны. Примеры таких пучков в глубоком море
показаны на рис. 2.
Ключевая идея, лежащая в основе нашего подхода, сформулирована в работе [2]. Она
заключается в переходе от традиционного разложения поля на антенне по плоским волнам к
заимствованному из квантовой механики разложению по когерентным состояниям [3]. Это
разложение устанавливает связь между лучевым и волновым представлениями поля и позволяет
найти распределение комплексной амплитуды поля в фазовой плоскости угол χ — глубина z
(рис. 3). На дистанции наблюдения приход каждого луча изображается точкой в данной фазовой
плоскости. Совокупность таких точек образует кривую, которую мы называем лучевой линией.
Жирные отрезки лучевой линии изображают приходы лучей, формирующих три пучка,
показанных на рис. 2.
124
Гидроакустические системы
С каждой точкой фазовой плоскости ( χ , z ) ассоциировано когерентное состояние [2−4].
Проекция регистрируемого поля на это состояние выделяет вклады волн, приходящие на
глубины, близкие к z , под углами, близкими к χ . Темно-серым цветом отмечены области,
которые мы называемы размытыми сегментами. Они включают точки, ассоциированные с
когерентными состояниями, формирующими три рассматриваемых волновых пучка при
конечной длине волны. Лучевая линия и размытй сегмент в свободном пространстве показаны
на рис. 1, б.
Выделение компоненты поля, формируемой заданным пучком лучей, осуществляется с
помошью пространственного фильтра, «настроенного» на прием суперпозиции когерентных
состояний, ассоциированных с соответствующим размытым сегментом. Данный фильтр задает
лепесток диаграммы направленности антенны, настроенный на прием пучка. В случае пучка
параллельных лучей получается обычный лепесток диаграммы направленности в свободном
пространстве.
Обсуждаемый подход может быть использован для решения задачи локализации
источника в волноводе. Традиционный метод решения этой задачи (matched field processing)
базируется на сравнении поля, измеренного антенной, с результатами расчета полей на той же
антенне для пробных источников, расположенных в разных точках волновода. Координаты
пробного источника, поле которого меньше всего отличается от зарегистрированного антенной,
служат оценкой координат реального источника.
Данный метод может быть модифицирован следующим образом. С помощью описанной
выше процедуры антенна поочередно настраивается на прием пучков лучей, приходящих от
источников из разных пробных точек волновода. В качестве выходного сигнала антенны для
каждого пробного источника принимается результат некогерентного суммирования вкладов
сигналов со сформированных для данного источника лепестков диаграммы направленности.
Оценкой координат реального источника являются координаты того пробного источника, для
которого выходной сигнал максимален. Преимуществом предложенного метода является то
обстоятельство, что он менее чувствителен к неизбежным неточностям математической модели
среды, чем традиционный метод mаtched field processing. Этот вопрос детально обсуждается в
работах [2] и [4].
Литература
1. Van Trees H. L. Optimum Array Processing: Detection Estimation and Modulation Theory. Part IV.
New York: John Wiley and Sons, 2002.
2. Virovlyansky A. L. // J. Acoust. Soc. Am. 2017. Vol. 141. P. 1180.
3. Schleich W. P. Quantum Optics in Phase Space. Berlin: Wiley-VCH. 2001.
4. Вировлянский А. Л. // УФН. 2023. Т. 193, № 9. С. 1010.
Данное исследование поддержано грантом Российского научного фонда № 20-19-00383.
125
Гидроакустические системы
ВЕРИФИКАЦИЯ МОДЕЛИ КОМПАКТНОГО ГИДРОАКУСТИЧЕСКОГО
ПРЕОБРАЗОВАТЕЛЯ СО СЛОЖНОЙ ФОРМОЙ ИЗЛУЧАЮЩЕЙ ОБОЛОЧКИ
НА ОСНОВЕ АНАЛИЗА ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
А. К. Бритенков, канд. физ.-мат. наук, Р. В. Травин, Б. Н. Боголюбов, канд. техн. наук
Институт прикладной физики РАН, Нижний Новгород, Россия
VERIFICATION OF THE MODEL OF A COMPACT HYDROACOUSTIC
TRANSDUCER WITH A COMPLEX SHAPE OF RADIATING SHELL BASED
ON THE ANALYSIS OF EXPERIMENTAL DATA
A. K. Britenkov, Ph.D., R. V. Travin, B. N. Bogolyubov, Ph.D.
Institute of Applied Physics of the Russian Academy of Sciences, Nizhny Novgorod, Russia
В процессе разработки низкочастотных гидроакустических излучателей требуется проведение
натурных испытаний для определения электроакустических параметров преобразователя и возможной
доработки. В докладе представлены результаты моделирования компактного 3D НЧИ –
преобразователя продольно-изгибного типа с цельнометаллической излучающей оболочкой сложной
формы. Проведена верификация конечно-элементной модели на основе сравнения резонансных
характеристик преобразователя в воздухе и электроакустических характеристик в воде. Анализ
расчётов и результатов измерений подтверждает корректность модели и возможность её
использования для излучателей подобной конструкции.
In the process of developing low-frequency hydroacoustic emitters, full-scale tests are required to determine the
electroacoustic parameters of the transducer and possible modifications. The report presents the results of
modeling a compact 3D LFR – a transducer of the longitudinal-bending type with an all-metal radiating shell of
complex shape. Finite elements model was verified by a comparison of the resonant parameters of the transducer
in air and the electroacoustic characteristics in water. Analysis of preliminary calculations and measurement
results confirms the correctness of the model and the possibility of its use for emitters of a similar design.
Введение. Актуальной задачей современной гидроакустики остаётся разработка
гидроакустических излучателей, совершенствование существующих и поиска новых
технических решений в конструкции преобразователей. Особый интерес представляет создание
гидроакустической аппаратуры для передачи гидроакустических сигналов на низких частотах,
которая необходима для приложений, предполагающих организацию акустических трасс
большой протяженности.
Компактные 3D НЧИ. Гидроакустический преобразователь представляет собой сложную
систему механических и электрических цепей (рис. 1), в которых происходит преобразование
электрической энергии в механические колебания с излучением звуковых волн [1]. Особую
сложность для расчётов и изготовления имеют компактные НЧИ (размером корпуса менее
60 см), так как КПД излучателя и диапазон его рабочих частот напрямую зависит от волнового
размера НЧИ и его габаритов, и размеры корпуса осложняют совмещение резонансов активного
элемента и механической колебательной системы, определяющей рабочую полосу частот
преобразователя.
Описанный в работе [2] компактный 3D НЧИ массой 1,2 кг и размерами корпуса 102×92 мм
(диаметр×длина) представляет собой пример преобразователя высокой удельной мощности
продольно-изгибного типа со сложной формой излучающей оболочки. Моделирование и
расчёты такого излучателя осложняются геометрией излучающей оболочки и сопряжены с
учётом значительного числа параметров.
Для определения электроакустических характеристик и необходимости доработки
требуются натурные испытания, однако проверку технических решений и уточнение
направления конструкторского поиска можно провести с помощью конечно-элементного
моделирования и предварительной оценки частотных параметров 3D НЧИ.
126
Гидроакустические системы
Гидроакустический излучатель
Электрические
колебательные
контуры
Механический
резонатор
Активный
элемент
Электромеханический
трансформатор
Излучающая поверхность
Электрическая
энергия
Тепловая энергия
Акустическая
энергия
Звуковые волны
Согласующий
трансформатор
Рис. 1. Колебательные системы гидроакустического преобразователя
Рис. 2. Спектральное распределение амплитуды колебаний корпуса 3D НЧИ
Моделирование корпуса излучателя. На основе 3D-модели (с описанной в работе [2]
геометрией), использованной для изготовления корпуса 3D НЧИ с помощью технологии
послойного лазерного сплавления из титанового порошка Ti-6Al-4V, предварительные расчёты
спектрального распределения в диапазоне частот от 1 до 4 кГц с шагом 50 Гц (рис. 2), показали
наличие резонансов, наблюдаемых при проведении вибро-механических измерений [2].
Как видно из рис. 2, основной резонанс для конечно-элементной модели находится на
частоте 3,3 кГц. Согласно проведённым экспериментам на вибростоле, наибольшая амплитуда
колебаний зарегистрирована на частоте 3,2 кГц. Незначительное расхождение наблюдаемого и
расчётного резонансов обусловлено различием значений параметров материала для корпуса и
использованной в расчётах 3D-модели излучателя.
Расчёты и моделирование 3D НЧИ. Поскольку основные составляющие
гидроакустического преобразователя – излучающая оболочка и активный элемент, расчёт АЧХ
этих элементов является важным этапом в процессе моделирования излучателя. Однако, влияние
АЧХ активного элемента на частотные характеристики такого подобного 3D НЧИ
незначительно, поскольку ввиду различия в размерах пьезокерамического столба
(Ø34,3×75,6 мм) и излучающей оболочки (Ø102×92 мм при толщине стенки до 1,5 мм), частоты
основных резонансов этих элементов разнесены достаточно далеко [2].
127
Гидроакустические системы
Рис. 3. Спектральное распределение амплитуды колебаний оболочки собранного 3D НЧИ
Синий цвет — малая впадина; зелёный цвет — гребень; красный цвет — торец
Для исследования характеристик собранного излучателя в воздухе [2] и проверки
корректности расчётов излучатель возбуждался шумовым и ЛЧМ сигналами с амплитудой 1 В.
Колебания излучающей оболочки снимались при помощи лазерного виброметра. Расчёты
спектрального распределения колебаний поверхности излучателя на основе конечно-элементной
модели в диапазоне частот от 1 до 5 кГц с шагом 50 Гц для нескольких точек оболочки показали
качественное сходство с результатами вибро-акустических измерений 3D НЧИ,
опубликованными в работе [3]. Основной резонанс преобразователя на частоте 3,5 кГц (рис. 3) в
целом совпадает с данными измерений в воздухе [3], подтверждая корректность использованной
модели 3D НЧИ.
Результаты электроакустических измерений в воде [3] в отличие от предварительной
оценки [2] показали расхождения основных резонансов более чем на 25% (1,7 кГц — измерения,
1,3 кГц — оценка), что характеризует сложность конструкции 3D НЧИ и требует учёта
дополнительных параметров в расчётах. Подобные грубые оценки электроакустических
параметров 3D НЧИ на основе экстраполяции результатов исследований [2, 4] необходимы на
начальном этапе проектирования для уточнения геометрии корпуса и размеров активного
элемента преобразователя.
С другой стороны, рассчитанная при помощи конечно-элементной модели
предварительная оценка чувствительности по напряжению 3D НЧИ в воде, отличается от
измеренной почти в 1,5 раза. С учётом сложности геометрии 3D НЧИ, на этапе грубых оценок в
процессе конструирования подобных преобразователей, такой точности достаточно.
Верификация конечно-элементной модели на основе результатов натурных измерений
электроакустических характеристик 3D НЧИ уменьшает расхождение расчётных значений
основного резонанса с экспериментальными данными до 5−10 %, что сопоставимо с
погрешностями электроакустических измерений (рис. 4), достигающих 10−12 %. Кроме того,
возникающие после сборки 3D НЧИ механические напряжения из-за сжатия пьезостолба,
меняют значения материальных констант, что может привести к расхождению
экспериментальных и расчётных данных.
128
Гидроакустические системы
Рис. 4. Зависимость чувствительности по напряжению 3D НЧИ от частоты
На рис. 4 зависимость чувствительности по напряжению в рабочей полосе частот,
рассчитанная по уточнённой конечно-элементной модели 3D НЧИ (учитывающей деформацию
корпуса излучателя после сборки и начальное механическое напряжение), практически
повторяет полученную в ходе натурных испытаний преобразователя [5].
Заключение. Анализ расчётных и экспериментальных данных показал возможность
применения 3D-моделей 3D НЧИ для предварительной оценки характеристик излучателей
подобной конструкции. Однако с учётом результатов электроакустических измерений в воде для
модели 3D НЧИ необходима некоторая корректировка как начальных условий и параметров
материала, так и геометрии элементов излучателя.
Литература
1. Свердлин Г. М. Гидроакустические преобразователи и антенны. JI.: Судостроение, 1980.
2. Бритенков А. К., Норкин М.С., Захаров С.Б., Травин Р.В., Стуленков А. В. Сравнительные
исследования вибромеханических характеристик компактных гидроакустических преобразователей
продольно-изгибного типа со сложной формой излучающей оболочки // Акустич. журн. 2023. Т. 69, № 6.
С. 808−816.
3. Бритенков А. К., Норкин М. С., Стуленков А. В., Травин Р. В. Исследование электроакустических
характеристик компактного 3D НЧИ – низкочастотного гидроакустического преобразователя продольноизгибного типа сложной формы // Научное приборостроение. 2023. Т. 33, № 4. С. 28−39.
4. Бритенков А. К., Норкин М. С., Травин Р. В. Разработка низкочастотных гидроакустических
излучающих систем высокой удельной мощности // Тр. XXVII науч. конф. по радиофизике. 2023.
С. 266−269.
5. Бритенков А. К., Боголюбов Б. Н., Дерябин М. С., Фарфель В. А. Измерение электромеханических
характеристик компактного низкочастотного гидроакустического излучателя сложной формы // Труды
МАИ. 2019. № 105. С. 1−24.
Работа выполнена в рамках госзадания ИПФ РАН «Распространение акустических волн в морской
среде и верхнем слое земной коры» (проект FFUF-2024-0041).
129
Гидроакустические системы
КАЛИБРОВКА ИЗЛУЧАТЕЛЯ В БАССЕЙНЕ С ОТРАЖАЮЩИМИ ГРАНИЦАМИ
С ИСПОЛЬЗОВАНИЕМ МЕТОДА ЭКВИВАЛЕНТНЫХ ИСТОЧНИКОВ
А. Л. Вировлянский1, д-р физ.-мат. наук, В. К. Бахтин1,2, М. С. Дерябин1,2, канд. физ.-мат. наук,
А. Ю. Казарова1, канд. физ.-мат. наук
1
Институт прикладной физики РАН, Нижний Новгород, Россия
2
ННГУ, Нижний Новгород, Россия
SOURCE CALIBRATION IN A TANK WITH REFLECTING BOUNDARY USING
THE EQUIVALENT SOURCE METHOD
A. L. Virovlyansky1, Dr.Sc., V. K. Bakhtin1,2, M. S. Derybin1,2, Ph.D., A. Yu. Kazarova1, Ph.D.
1
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
2
UNN, Nizhny Novgorod, Russia
Обсуждается метод реконструкции звукового поля, возбуждаемого калибруемым источником в
свободном пространстве, по измерениям поля, возбужденного тем же источником в бассейне. Процедура
реконструкции базируется на использовании эталонного акустического монополя и сопоставлении полей,
излученных им из специально выбранных точек бассейна, с полем калибруемого источника. Это позволяет
представить поле калибруемого излучателя в виде суперпозиции полей эквивалентных источников
(акустических монополей) с известными амплитудами. Приведены результаты применения данного
метода для измерения амплитудно-частотной характеристики излучателя монопольного типа.
A method for reconstructing the sound field excited by a calibrated source in free space from measurements of the
field excited by the same source in a tank is discussed. The reconstruction procedure is based on the use of a
reference acoustic monopole and comparison of the fields emitted by it from specially selected points of the tank
with the field of the calibrated source. This makes it possible to represent the field of the calibrated source as a
superposition of the fields of equivalent sources (acoustic monopoles) with known amplitudes. The results of using
this method to measure the amplitude-frequency response of a monopole-type emitter are presented.
В работах [1, 2] предложен метод калибровки источника звука в бассейне с отражающими
границами, базирующийся на представлении поля данного источника в свободном пространстве
в виде суперпозиции полей эквивалентных источников (ЭИ), каждый из которых является
акустическим монополем. При этом комплексная амплитуда поля источника на частоте f в
точке наблюдения R выражается суммой
N
u ( R ) = ∑G ( R,rn ) An , G ( R,rn ) =
n =1
exp(ik R − rn )
R − rn
,
(1)
где k = 2π f / c , c — скорость звука; rn — точки расположения ЭИ; An — их амплитуды.
Ключевым моментом является предположение, что в бассейне поле калибруемого
источника представимо в виде суперпозиции полей тех же ЭИ с теми же амплитудами An . При
этом поле, возбуждаемое в бассейне, имеет вид
u ( R ) = ∑ n =1G ( R, rn ) An ,
N
где G ( R , rn )
(2)
— поля, возбуждаемые отдельными ЭИ (акустическими монополями).
Неизвестная нам функция Грина G ( R, rn ) описывает многократные переотражения волн от
границ бассейна и кардинально отличается от функции Грина свободного пространства
G ( R, rn ) .
130
Гидроакустические системы
Обсуждаемая в [1, 2] процедура реконструкции амплитуд ЭИ An по измерениям в бассейне
заключается в следующем.
(i) Выбираются N точек расположения ЭИ rn и M точек расположения приемников R m .
Затем выполняется калибровка бассейна: эталонный акустический монополь поочередно
помещается во все N точек rn и сигналы, излученные из каждой точки, регистрируются всеми
M приемниками. При этом измеряются значения функции Грина в бассейне G ( R m , rn ) ,
которые мы рассматриваем как элементы матрицы G размера M × N .
(ii) Калибруемый источник помещается в бассейн и его поле измеряется всеми
приемниками. Результатом этого измерения является M × 1 вектор u комплексных амплитуд с
элементами u ( R m ) .
(iii) С учетом (2) для определения неизвестных амплитуд, образующих N × 1 вектор A c
элементами An , мы получаем систему линейных уравнений, которая в матричных обозначениях
принимает вид
.
u = GA
inv u , где G
ˆ =G
inv — псевдообратная матрица к матрице G
дает
Решение этой системы A
искомые оценки амплитуд ЭИ An . Последующая подстановка этих амплитуд в (1) дает решение
задачи о реконструкции поля калибруемого источника в свободном пространстве по измерениям
его поля в бассейне.
Для тестирования обсуждаемого подхода был выполнен лабораторный эксперимент.
Измерения проводились в бассейне, представляющем собой заполненный водой куб со стороной
1 м. Точки rn , в которые помещался эталонный монополь, составляли куб размером 3×3×3 с
шагом 2 см между соседними точками. Приемники располагались в M=27 точках R m , удаленных
от куба на расстояния около 30 см. Расположение монополей (точки куба) и приемников
схематически показано на рис. 1. В качестве эталонного монополя использовался гидрофон B&K
8103. Он поочередно помещался во все 27 точек, образующих куб, и возбужденные поля
регистрировались всеми приемниками. Изо всех точек излучался один и тот же ЛЧМ звуковой
импульс длительности 1 с изменением частоты от 4 до 10 кГц. Такой же сигнал излучал
калибруемый источник, помещенный в центр куба.
При обработке данных с использованием Фурье-преобразования выделялись комплексные
амплитуды зарегистрированных звуковых импульсов на сетке частот f , заполняющих интервал
от 4 до 10 кГц с шагом 50 Гц. Для каждой из этих частот были найдены введенные выше значения
функции Грина в бассейне G ( R m , rn ) и вектор амплитуд сигналов u . По этим данным на
каждой частоте были вычислены амплитуды 27 ЭИ, задающие поле калибруемого источника в
свободном пространстве (1).
В нашем лабораторном эксперименте калибровался источник монопольного типа, размер
которого мал по сравнению с длинами волн во всей полосе излучаемого ЛЧМ импульса. Поэтому
результатом реконструкции поля в свободном пространстве по формуле (1) на все частотах
является приблизительно изотропное поле. На каждой частоте мы вычислили интенсивность
излученного сигнала I , усредненную по всем направлениям. Поскольку интенсивность
эталонного монополя не равна единице, как это предполагается в (1), найденная величина I
представляет собой отношение интенсивностей калибруемого и эталонного источников.
131
Гидроакустические системы
Рис. 1. Схема расположения приемников
и эквивалентных источников
Рис. 2. Отношения интенсивностей калибруемого и
эталонного источников
Сплошная линия — I ; пунктир — I1 .
Для сравнения другую оценку того же отношения интенсивностей мы получили
следующим образом. В процессе измерений на каждой частоте f поле на 27 приемниках
измерялось для 27 положений эталонного источника в точках куба, а также для 27 положений
калибруемого источника в тех же точках (не только в центральной точке куба, необходимого для
измерения u . Таким образом, на каждой частоте мы имеем 272 = 729 значений комплексных
амплитуд полей калибруемого и эталонного источников, которые мы обозначим ai и bi ,
i = 1,..., 729 , соответственно. Если бы оба источника были идеальными монополями, отношение
ai / bi было бы одинаковым для всех i . В реальности это не так, и отношения для разных i
несколько различаются. В качестве оценки отношения интенсивностей наших источников мы
принимаем
I1 =
2
1
729
ai / bi .
∑
i =1
729
На рис. 2 сопоставлены отношения интенсивностей калибруемого и эталонного
источников, найденных двумя описанными способами и сглаженных по частоте с масштабом
300 Гц. Хорошее совпадение зависимостей I ( f ) и I1 ( f ) подтверждает работоспособность
подхода, развитого в работах [1, 2].
Литература
1. Virovlyansky A. L., Deryabin M. S. Journal of Sound and Vibration. 2019. Vol. 455. P. 69−81.
2. Gumerov N., Duraiswami R. Fast multipole methods for the Helmholtz equation in three dimensions.
Oxford: Elsevier Ltd. 2004.
Работа выполнена в рамках государственного задания ИПФ РАН (проект FFUF-2024-0041).
132
Гидроакустические системы
СОПОСТАВЛЕНИЕ РАСЧЕТНЫХ ЗНАЧЕНИЙ ДАВЛЕНИЙ НА РАЗНОСТНЫХ
ЧАСТОТАХ, ПОЛУЧЕННЫХ ПО РАЗЛИЧНЫМ МОДЕЛЯМ ПАРАМЕТРИЧЕСКОГО
ИЗЛУЧЕНИЯ ЗВУКА
В. Б. Железный, Д. Б. Островский, д-р техн. наук
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
COMPARISON OF CALCULATED PRESSURES AT DIFFERENCE FREQUENCIES
OBTAINED VIA VARIOUS MODELS OF PARAMETRIC ACOUSTIC RADIATION
V B. Zheleznyi, D. B. Ostrovskiy, Dr.Sc.
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Для описания давления, развиваемого параметрическими излучающими антеннами (ПИА), был
разработан ряд теоретических моделей, использующих различные приближения. Общего сопоставления
моделей ПИА не проводилось, что ограничивает разработку систем с ПИА. В докладе представлено
численное сопоставление давлений на разностных частотах по четырем моделям для ПИА с круглыми
поршневыми источниками накачки, с фиксированными уровнями давления на частотах накачки, в
зависимости от диаметра источника. Учитывая различие результатов по моделям, необходимы
дальнейшие теоретические исследования формирования параметрического излучения.
A number of theoretical models using different approximations were developed for the description of pressure
output of parametric arrays. General comparison of parametric array models hasn’t been conducted so the
development of systems with parametric arrays is limited. The paper presents numerical comparison of pressures
at difference frequencies via four models for parametric arrays with round piston pumping sources, fixed pressure
levels at pumping frequencies depending on source diameter. Taking into consideration distinction of model
results, further theoretical researches of emission of parametric radiation are required.
Параметрические излучающие антенны (ПИА) [1, 2] широко используются для
профилирования донных осадков (параметрические профилографы, Parametric Sub Bottom
Profiler). С начала применения профилографов в 1970-х по настоящее время было создано более
30 типов профилографов с ПИА, из которых 2/3 профилографов были выполнены Innomar
Technologie GmbH (Германия), Atlas Electronic GmbH (Германия), Kongsberg Maritime
(Норвегия), Tritech International Ltd. (Великобритания), Haiying-Cal Tec Marine Technology Co.,
Ltd. (Китай), НПФ «Экран» (РФ), АО «Концерн «Океанприбор» (РФ). В целом ПИА относятся к
сложным образцам техники, при создании которых приходится решать ряд задач и проблем [3],
не свойственных традиционным излучателям звука. При этом задача описания давления на
разностной частоте (РЧ) по причине появления значительного числа теоретических моделей
ПИА, отличающихся друг от друга на уровне физических приближений, так и не была
однозначно решена. И, если в 1970-1980-х годах еще и давались теоретические оценки давления
на РЧ ПИА для профилографов TOPS по методу Моффетта-Меллена (ММ) [4] и Parasoud на
основе решения уравнения Хохлова – Заболотской – Кузнецова по [1] (метод ХЗК), то в
дальнейшем для систем с ПИА значения давления на РЧ перестали указываться. Кроме того,
после [1, 2, 4] появилась модель (метод) волновых фронтов (МВФ), вывод которой был детально
представлен в [5]. В отличие от методов ХЗК, ММ и других, использующих для описания ПИА
виртуальные источники, по [5] поле ПИА формируется за счет незначительного превращения
волнового фронта накачки в ходе распространения в набор суммирующихся элементарных
волновых фронтов поля РЧ, амплитудное значение которых в [5] устанавливалось на основе
результатов метода Зверева-Калачева [6]. Также с использованием [6] было получено
расширение метода Зверева-Калачев (РМЗК) на область сферического взаимодействия волн
накачки [7]. Очевидно, что для понимания отличий этих описаний ПИА требуется проведение
их сопоставления путем совместного численного моделирования.
Для численного моделирования выберем плоские круглые излучатели накачки с
диаметрами (dи): 0,36 м, 0,27 м, 0,18 м и 0,09 м. Значения давлений на частотах накачки f1 и f2
выбирались равными Pf1 =105 Па∙м и Pf2 =105 Па∙м, средняя частота накачки f определялась
f = (f1+f2)/2 = 105 Гц, длина зоны Френеля RФ = πdи2f°/4c. Параметры среды распространения:
скорость звука c = 1500 м/с, плотность ρ = 1000 кг/м3, параметр нелинейности ε = 3,5,
133
Гидроакустические системы
коэффициент затухания звука на средней частоте накачки αf = 0,005 м-1. Режим насыщения
накачки отсутствовал. Для расчета осевого давления ПИА PF на разностной частоте F = │f1-f2│
использовались выражения по [4, 5, 7, 8]. Все уровни давлений брались эффективными и были
приведены к 1 м. Расчет по МВФ [5] проводился по выражению:
PF =
∞
2επ FPf 1Pf 2
ρ c3
∫
e
−2α f x
dx ,
(1)
2α S f 2
f
,
Ei
cF
(2)
x
RФ
Расчет по методу ММ [4] проводился по выражению:
PF =
2πε FPf 1Pf 2
ρ c3
где S — площадь излучателя накачки (S = πdи2/4).
Расчет по методу ХЗК [8] производился по выражению:
i επ F 2Pf 1Pf 2 − α z
PF P=
(0,
z
)
e F
=
з
F
2ρ c 2Sf 2
lз
=
zз
exp [ − y ]
∫ b + i( y − z ) + z yB dy ,
0
з
Lд lз
1
z
FS
FS
, zз =
,b
,B
, Lд
, lд1
=
=
=
=
αf
lз
clз
lд1lд2
c
з
f1 S
,=
lд2
c
,
(3)
f2 S
c
где αF — коэффициент затухания звука на частоте F, (αF =(0.036‧(F/1000)3/2)/8686 м-1), поскольку
при расчетах по (3) значение z выбиралось z=5lз то с учетом близких к нулю значений
произведения (-αFz), коэффициент затухания αF на результат (3) не оказывал.
Расчет по РМЗК [7] производился по системе выражений (4, 5):
=
PF (τ )
π
2
×
∞
∫∫
ε π 2 dи2 F 2 Pf 1Pf 2
2 2 RФ ρ c 4
cos ( 2πFτ ) +
2 2ε π2F 2 Pf 1Pf 2
ρ c4
×
x (1 − cos θ )
exp(−2α f x )⋅D1 (θ) ⋅D 2 (θ) ⋅ cos 2πF τ +
⋅sinθ d θ dx ,
c
(4)
0 RФ
πd f
πd f
2 J1 и 1 sinθ
2 J1 и 2 sinθ
.
c
, D (θ)
c
=
D1 (θ) =
2
π dи f2
π dи f1
c sinθ
c sinθ
=
PF PF (τ=
F const, 0 ≤ τF ≤ 1 ,
F ) max [ PF (τ) ] при=
(5)
где θ — угол, отсчитываемый от оси излучателя накачки (оси ПИА) от 0 до π/2; D1(θ) и D2(θ) —
функции характеристик направленности на частотах f1 и f2; J1 — функция Бесселя 1-го порядка;
τ — параметр, определяющий с каким отклонением по фазе 2πFτ относительно виртуальных
источников, находящихся на оси ПИА (θ=0), ведется интегрирование всех виртуальных
источников по (4); PF(τ) — значение (4) при произвольном значении τ при условии 0 ≤ Fτ ≤ 1;
τF — значение параметра τ, при котором (3) достигает максимального значения при заданной
частоте F.
134
Гидроакустические системы
Рис. 1. Результаты расчетов зависимости PF от F для ПИА с разными диаметрами излучателей накачки
а — dи=0,36 м; б — dи=0,27 м; в — dи=0,18 м; г — dи=0,09 м; на графиках расчеты PF обозначены: 1 — по МВФ
(синий); 2 — по методу ММ (красный); 3 — по методу ХЗК (зеленый); 4 — по РМЗК (синий пунктир)
Результаты расчетов по (1)−(5) давления PF, развиваемого ПИА в зависимости от частоты
F для значений F от 0,5 кГц до 10 кГц, представлены на рис. 1, из которых следует, что значения
PF по МФВ численно превышают значения, полученные для методов на основе виртуальных
источников ММ, ХЗК и РМЗК, так же значения PF по РМЗК превышает значения по ММ и ХЗК
(кроме рис. 1, а, где данные по РМЗК и методу ХЗК близки). При уменьшении диаметра dи
значения PF по ММ и РМЗК в диапазоне от 4 до 10 кГц начинают стремиться к значениям по
МВФ, а характер изменения PF по методу ХЗК может быть объяснен его выводом только для
узких пучков [1, 2].
Учитывая различие результатов (рис. 1), полученных по методам ММ [4], ХЗК [8], РМЗК
[7] и МВФ [5], можно отметить, что теория параметрического излучения звука требует
дальнейшего развития, без успехов которого создание систем с ПИА будет во многом
базироваться на использовании эмпирических подходов.
Литература
1. Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. Л.: Судостроение,
1981.
2. Новиков Б. К., Тимошенко В. И. Параметрические антенны в гидролокации. Л.: Судостроение,
1990.
3. Железный В. Б., Островский Д. Б. Проблемы построения акустических параметрических
профилографов // Мат. IV Межд. конф. по морским интеллектуальным технологиям «Моринтех-2001».
СПб: НИЦ «Моринтех», 2001. С. 261−265
4. Moffett M. B., Mellen R. H. Model for parametric acoustic source // J. Acoust. Soc. Amer. 1977. Vol. 61,
№ 2. P. 325−337.
5. Железный В. Б. Об описании параметрических излучающих антенн на основе модели волновых
фронтов // Гидроакустика. 2019. Вып. 40(4). С. 5–12.
6. Зверев В. А. Калачев А. И. Измерение рассеяния звука звуком при наложении параллельных
пучков // Акуст. журн. 1968. Т. 14, № 2. С. 214–220.
7. Железный В. Б. Применение метода Зверева–Калачева для определения давления
параметрического излучения звука в области сферического расхождения волн накачки // Гидроакустика.
2020. Вып.44(4). С. 52–64.
8. Зарембо Л. К., Тимошенко В. И. Нелинейная акустика. М.: изд. МГУ, 1984.
135
Гидроакустические системы
О НЕХАРАКТЕРНЫХ СЛУЧАЯХ ФОРМИРОВАНИЯ ПОЛЕЙ РАЗНОСТНОЙ
ЧАСТОТЫ ПРИ ПАРАМЕТРИЧЕСКОМ ИЗЛУЧЕНИИ ЗВУКА В ВОДЕ
В. Б. Железный
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
ON ABNORMAL CASES OF DIFFERENCE FREQUENCY FIELD GENERATION
AT PARAMETRIC ACOUSTIC RADIATION IN WATER
V. B. Zheleznyi
JSC «Concern «Oceanpribor», St. Petersburg, Russia
При исследовании параметрических излучающих антенн (ПИА) изредка наблюдалось крайне низкое
давление на разностной частоте. Учитывая, что при построении систем с ПИА удавалось находить
ПИА с приемлемыми параметрами, внимание этим редким случаям не уделялось. На основе эксперимента
с двумя одноканальными ПИА с одинаковыми апертурами и частотами (отличавшихся только
значениями сопротивления на накачке) было выявлено, что уровни звукового давления этих ПИА
отличались друг от друга. Указанный факт необычен и требуют дополнительных исследований.
Extremely low pressure at difference frequency was occasionally observed at the research of parametric arrays.
Taking into consideration that at designing of systems with parametric arrays it was possible to find parametric
arrays with acceptable parameters, the attention to these rare occasions was not paid. Based on the experiment
with two single-channel parametric arrays with the same apertures and frequencies (differing only in pumping
resistance) it was revealed that pressure levels of these parametric arrays were different from each other.
The specified fact is abnormal and requires additional researches.
Акустические параметрические излучающие антенны (ПИА) [1, 2] относятся к сложным
образцам техники, при создании которых приходится решать проблем [3], не свойственных
традиционным излучателям звука. При этом считается, что, несмотря на приближенный характер
ряда теоретических описаний формирования низкочастотного (НЧ) звукового давления PF,
развиваемого ПИА на разностной частоте F при взаимодействии двух высокочастотных (ВЧ)
волн накачки (с частотами f1 и f2), сами ПИА вполне приемлемо изучены для применения на
практике, например, в системах профилирования донных осадков [1, 2]. Однако, можно отметить
редкие случаи, когда наблюдалось крайне низкое по уровню звуковое давление на разностных
частотах, недостаточное для работы профилографа с ПИА. В частности, автором наблюдалось,
три таких случая, два случая при исследовании двухканальных ПИА и один случай при
исследовании двух одинаковых по апертуре и средней частоте накачки f (f =(f1+f2)/2)
одноканальных ПИА. При этом эксперимент с двумя одноканальными ПИА был, по сути,
направлен на сопоставление уровней давления ПИА, исследуемых ПИА в одинаковых
физических условиях. Учитывая развитие вариантов теоретического описания ПИА на основе
модели волновых фронтов (МВФ) [4] и на основе расширения модели Зверева-Калачева (РМЗК)
на область сферического распространения волн накачки на основе виртуальных источников [5],
которые позволяют перейти к определению давления PF ПИА на оси в точке измерения, можно
провести сопоставление полученных давлений с расчетами.
Для эксперимента были выбраны два ПИА (ПИА-1 и ПИА-2) с круглыми излучателями
накачки с одинаковыми диаметрами dи=0,21 м и одинаковыми f=115 кГц, отличающиеся только
сопротивлением нагрузки на резонансе, в качестве источника напряжения на накачке
использовался ключевой усилитель мощности (КУМ) [6]. Эксперимент проводился в
заглушенном бассейне по схеме, приведенной на рис. 1.
На рис. 1: 1, 2 — генераторы частот f1, f2; 3 — КУМ; 4 — переключатель; 5 — осциллограф,
вольтметр; 6 — поворотно-координатное устройство; 7 — ВЧ усилитель с фильтрами;
8 — вольтметр и осциллограф для измерения давления на накачке; 9 — НЧ усилитель с
фильтрами; 10 — вольтметр и осциллограф для измерения PF ; Гвч и Гнч — ВЧ и НЧ гидрофоны;
Т — термометр.
136
Гидроакустические системы
Рис. 1. Схема эксперимента
Рис.2. Блок-схема КУМ
Е — напряжение питания; Uα1 и Uα2 — сигналы регулировки амплитуды каналов;
Uн(t) — напряжение на накачке
Параметры пресной воды в бассейне были: плотность ρ = 1000 кг/м3, скорость звука
c = 1468…1470 м/с, параметр нелинейности ε = 4, коэффициент поглощения звука на средней
частоте накачки αf = 0,0051 Нп/м. Значение давление на частотах накачки Pf1 и Pf2
выдерживались равными 105 Па∙м. Расстояние между ПИА и измерительным НЧ гидрофоном
(Гнч) было h=34 м. Значения паразитных разностных сигналов, возникающих за счет
нелинейности НЧ приемного тракта, были менее 80 дБ относительно уровня сигнала накачки на
НЧ гидрофоне. Измерения значений звукового давления ПИА-1 и ПИА-2 производилось
последовательно, путем их замещения ПИА-1 и ПИА-2 по месту.
Блок схема КУМ [6] с одноканальным выходом представлена на рис. 2.
Расчет PF по МВФ [4] для дистанции h=34 м проводился по выражению:
PF ( R Ф, h ) =
επ FPf 1Pf 2
ρ c3
h
∫
e
−2α f x
x
dx ,
(1)
RФ
где RФ — длина зоны Френеля; RФ = πdи2f°/4c; значения PF, Pf1 и Pf2 — амплитудные, приведенные
к 1 м; F = │f1 - f2│; f = (f1 +f2)/2.
137
Гидроакустические системы
Расчет по РМЗК проводился по модификации формул [5] для дистанции h=34 м:
PF=
(τ , RФ, h )
ε π 2dи2 F 2Pf 1Pf 2
4 RФ ρ c 4
cos ( 2πFτ ) +
2 ε π2F 2Pf 1Pf 2
ρ c4
×
π
πd f
πd f
2 J1 и 1 sinθ 2 J1 и 2 sinθ
h exp( −2α f x )
c
c
⋅
×
×
⋅
π
π
d
f
d
f
2
2
и 1
и 2
h + x − 2hx cos ( x )
c sinθ
c sinθ
0 RФ
2 h
∫∫
(2)
h 2 + x 2 − 2hx cos ( x ) − ( h − x )
⋅ sinθ d θ dx
× cos 2πF τ +
c
PF ( RФ ,=
h ) PF (τ F , RФ ,=
h) max [ PF (τ, RФ , h) ] при=
F const, 0 ≤ τF ≤ 1 ,
(3)
где θ — угол, отсчитываемый от оси излучателя накачки (оси ПИА) от 0 до π/2; J1 — функция
Бесселя 1-го порядка; τ — параметр, определяющий с каким отклонением по фазе 2πFτ
относительно виртуальных источников, находящихся на оси ПИА (θ=0), ведется интегрирование
всех виртуальных источников по (2); PF(τ,RФ,h) — значение (2) при произвольном значении τ при
условии 0 ≤ Fτ ≤ 1; τF — значение параметра τ, при котором (2) достигает максимального
значения (3) при заданной частоте F.
Сопоставление ПИА-1 и ПИА-2 между собой и теоретических расчетов по МВФ (1) и по
РМЗК (2, 3) с результатами экспериментов переставлено на рис. 3. По ним видно, что значения
давление PF ПИА-1 с КУМ оказались даже на ~30% выше расчетов по (1), а значения давление
PF ПИА-2 с КУМ оказались в 7…8 раз ниже значений давлений ПИА-1 и заметно ниже расчета
по РМЗК.
а
б
Рис. 3. Сопоставление теоретических расчетов по МВФ (1)
Сплошная линия 1, и по РМЗК (2, 3); пунктирная линия 2, с результатами экспериментов,
полученных при испытаниях; а — ПИА-1 (треугольники — ▲); б — ПИА-2 (квадраты — ■)
138
Гидроакустические системы
Таким образом, действительно можно наблюдать при использовании ПИА с КУМ
различия уровней давления PF для разных комбинаций ПИА и КУМ. Предположительно,
наблюдавшийся эффект мог быть вызван либо специфическим проявлением термодинамических
процессов в системе «КУМ-ПИА-реальная вода» при формировании излучения волн накачки [7],
либо влиянием кратных ВЧ гармоник частот накачки, наблюдавшихся в воде при использовании
ПИА с КУМ по схеме [6]. Таким образом, при разработке ПИА следует обязательно
экспериментально определять значение уровней звукового давления на разностных частотах и
сопоставлять их с теоретическими результатами.
Литература
1. Новиков Б. К., Руденко О. В., Тимошенко В.И. Нелинейная гидроакустика. Л.: Судостроение,
1981.
2. Новиков Б. К., Тимошенко В. И. Параметрические антенны в гидролокации. Л.: Судостроение,
1990.
3. Железный В. Б., Островский Д. Б. Проблемы построения акустических параметрических
профилографов // Мат. IV Межд. конф. по морским интеллектуальным технологиям «Моринтех-2001».
СПб: НИЦ «Моринтех», 2001. С. 261−265.
4. Железный В. Б. Об описании параметрических излучающих антенн на основе модели волновых
фронтов // Гидроакустика. 2019. Вып. 40(4). С. 5–12.
5. Железный В. Б. Применение метода Зверева–Калачева для определения давления
параметрического излучения звука в области сферического расхождения волн накачки // Гидроакустика.
2020. Вып. 44(4). С. 52–64.
6. Александров В. А., Островский Д. Б., Сиверс М. А. Генераторные устройства для
гидроакустических антенн // Электроника: Наука, Технология, Бизнес. 2002. Вып. 1. С. 40−45.
7. Zhelezny V. Investigation of interaction between sound between sources and non-adiabatic medium //
Proc. of the 11-th Int. Congress on Sound and Vibration. St. Petersburg. 2004. P. 3579−3586.
139
Гидроакустические системы
ВАРИАНТ ЧАСТНОГО АНАЛИТИЧЕСКОГО РЕШЕНИЯ ЗАДАЧИ МЕХАНИКИ
ДЕФОРМИРУЕМОГО ТВЕРДОГО ТЕЛА ПРИМЕНИТЕЛЬНО К РАСЧЕТУ
ЧУВСТВИТЕЛЬНОСТИ ЭЛЕКТРОАКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ
НА ОСНОВЕ ПЛЕНКИ ИЗ ПОЛИВИНИЛИДЕНФТОРИДА МАРКИ Ф-2МЭ
И. И. Дементьев, канд. техн. наук, А. О. Костина, В. А. Шабанов
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
VERSION OF THE PRIVATE ANALYTICAL SOLUTION OF THE PROBLEM
OF MECHANICS OF THE DEFORMABLE RIGID BODY IN RELATION
TO CALCULATION OF SENSITIVITY OF THE ELECTRO-ACOUSTIC
CONVERTER ON THE BASIS OF THE FILM FROM POLIVINILIDENFTORID
OF THE F-2ME BRAND
I. I. Dementiev, Ph.D., A. O. Kostina, V. A. Shabanov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В статье представлен вариант частного аналитического решения системы дифференциальных
уравнений в частных производных, разработанной в рамках решения задачи механики деформируемого
твердого тела для выполнения расчетов чувствительности электроакустического преобразователя на
основе пленочного материала из поливинилиденфторида марки Ф-2МЭ. В работе сделан акцент на
аналитический подход к исследованию характеристик пленочных чувствительных элементов
преобразователей, так как численные методы, реализуемые в средах разных пакетов программ,
позволяют получить только прогнозы характеристик чувствительных элементов, по причине
ограничений функционала применяющихся пакетов программ.
In article the version of the private analytical decision of the system of differential equations in partial derivatives
developed within the solution of the problem of mechanics of the deformable rigid body for performance of
calculations of sensitivity of the electro-acoustic converter on the basis of film material from the polivinilidenftorid
of the F-2ME brand is provided. In work the emphasis on analytical approach to research of characteristics of
film feelers of converters as the numerical methods realized in environments of different software packages allow
to receive only forecasts of characteristics of feelers, because of restrictions of functionality of the applied software
packages is placed.
Модернизация новых и существующих гидроакустических комплексов надводных и
подводных носителей и их тактико-технических характеристик обуславливает увеличение
площадей апертур гидроакустических антенн, что ведет к увеличению количества приемных
элементов. Из чего исходит, что одним из рациональных способов разрешения указанного
расхождения следует использование в составе приемных гидроакустических антенн
электроакустических преобразователей на основе пленок из поливинилиденфторида, например,
марки Ф-2МЭ, которые обладают рядом преимуществ [1, 2]. Гидроакустические антенны на
основе пленочных материалов отличаются от антенн, созданных с использованием
традиционных преобразователей на основе пьезокерамики, тем, что апертуры антенн на основе
пленок создают непрерывные нелинейные объекты с анизотропией физико-механических и
пьезоэлектрических свойств.
В статье представлен вариант частного аналитического решения задачи механики
деформируемого
твердого
тела
применительно
к
расчету
чувствительности
электроакустического преобразователя на основе пленки из поливинилиденфторида марки
Ф-2МЭ.
Введем в рассмотрение ортогональную систему декартовых координат Oxyz, совместив
оси x и y с направлениями главных кривых срединной поверхности объекта моделирования, а ось
z направим по нормали к указанной поверхности. Будем предполагать, что объект
моделирования является абсолютно жестким по толщине, то есть Ez → ∞, а εz = 0.
Система уравнений равновесия в усилиях и моментах образуется путем интегрирования
уравнений равновесия элементарных объемов материала в напряжениях:
140
Гидроакустические системы
∂
∂x
∂
∂x
∂
∂x
∂
∂x
∂
∂x
∂
Nx +
∂y
N xy +
Qx +
Mx +
∂
∂y
∂
∂y
2
N yx + q x = ρ ⋅ ∫
∂t
−h
2
∂V
−h
∂t
2
∂W
−h
∂t
2
−h
h
∂y
dz ;
2
h
Q y + qn = ρ ⋅ ∫
h
∂
dz ;
2
h
N y + qy = ρ ⋅ ∫
M yx + mx − Qx = ρ ⋅ ∫ z ⋅
∂y
M xy +
∂
∂U
h
M y + m y − Qy = ρ ⋅ ∫ z ⋅
−h
(1)
dz ;
∂U
2
∂t
2
∂V
dz;
2
∂t
2
dz ,
где t — время; ρ — плотность материала; U, V, W — перемещения элементарных объемов в
направлениях координатных осей x, y, z; Nx, Ny, Nxy = Nyx, Mx, My, Mxy = Myx, Qx, Qy — интегральные
характеристики механических напряжений по поперечным сечениям материала; qx, qy, qn, mx, my
— внешние поверхностные силовые и моментные нагрузки.
Механические напряжения традиционно определяют через относительные деформации
материала из обратной формы уравнений обобщенного закона Гука:
σ x = B1 ⋅ ε x + B2 ⋅ ε y + B3 ⋅ ε z + B4 ⋅ ε xy + B5 ⋅ ε xz + B6 ⋅ ε yz ;
σ y = B7 ⋅ ε x + B8 ⋅ ε y + B9 ⋅ ε z + B10 ⋅ ε xy + B11 ⋅ ε xz + B12 ⋅ ε yz ;
σ z = B13 ⋅ ε x + B14 ⋅ ε y + B15 ⋅ ε z + B16 ⋅ ε xy + B17 ⋅ ε xz + B18 ⋅ ε yz ;
τ xy = τ yx = B19 ⋅ ε x + B20 ⋅ ε y + B21 ⋅ ε z + B22 ⋅ ε xy + B23 ⋅ ε xz + B24 ⋅ ε yz ;
(2)
τ xz = τ zx = B25 ⋅ ε x + B26 ⋅ ε y + B27 ⋅ ε z + B28 ⋅ ε xy + B29 ⋅ ε xz + B30 ⋅ ε yz ;
τ yz =τ zy = B31 ⋅ ε x + B32 ⋅ ε y + B33 ⋅ ε z + B34 ⋅ ε xy + B35 ⋅ ε xz + B36 ⋅ ε yz ,
где Bi (i = 1, 2,…, 36) — коэффициенты упругости материала.
Для ортогонально анизотропного материала коэффициенты Bi определяются по
следующим формулам:
B=
1
B
=
7
−a y
a yx ⋅ axy − a y ⋅ ax
a yx
a yx ⋅ axy − a y ⋅ ax
; B=
2
B8
; =
axy
a yx ⋅ axy − a y ⋅ ax
B=
B=
B=
; B=
0;
3
4
5
6
−ax
B9 B=
B=
B=
; =
0;
10
11
12
a yx ⋅ axy − a y ⋅ ax
B=
B=
B=
B=
B=
B=
B=
B=
B=
0;
13
14
15
16
17
18
19
20
21
B=
Gxy ; B=
B=
B=
B=
B=
B=
Gxz ;
0; B=
22
23
24
25
26
27
28
29
B=
B=
B=
B=
B=
B=
0; B=
G yz ,
30
31
32
33
34
35
36
141
(3)
Гидроакустические системы
где ax, ay, axy, ayx — коэффициенты податливости материала; Gxy, Gxz, Gyz — модули сдвига.
Компоненты тензора относительных деформаций объекта моделирования, необходимые
для расчета механических напряжений, определяют из геометрических уравнений механики
деформируемого твердого тела, как указано в работе [3].
Уравнения, описывающие кинематику элементарных объемов объекта моделирования,
описываются в следующем виде:
U ( x=
, y, z , t ) u0 ( x, y, t ) + z ⋅ ψ 0 ( x, y, t );
V ( x,=
y, z , t ) v0 ( x, y, t ) + z ⋅ Φ 0 ( x, y, t );
(4)
W ( x, y, t ) = w0 ( x, y, t ),
где u0(x, y, t), v0(x, y, t) — перемещения элементарных объемов в плоскости срединной
поверхности; w0(x, y, t) — функция прогиба материала; ψ0(x, y, t), Φ0(x, y, t) — углы поворота
поперечных сечений относительно срединной поверхности.
Задавая вид распределений (4), получим систему из пяти разрешающих уравнений (1).
Предлагаемый метод аналитического решения системы дифференциальных уравнений в
частных производных основан на использовании операторного метода. Частое решение найдено
для случая жесткого защемления образца пьезоэлемента прямоугольной формы по периметру [3]
и имеет следующий вид:
m⋅π⋅ x
2⋅m⋅π⋅ x
=
φ1 B ⋅ 4 ⋅ Λ1 ⋅ cos
+ cos
+ 3 ⋅
l
l
n⋅π⋅ y
2⋅n⋅π⋅ y
⋅ 4 ⋅ Λ 2 ⋅ cos
+ cos
+ 3 ⋅ sin ( ω1 ⋅ t + λ1 ) ;
b
b
m⋅π⋅ x
2⋅m⋅ π⋅ x
+ cos
=
φ 2 B ⋅ 4 ⋅ Λ 2 ⋅ cos
+ 3 ⋅
l
l
n⋅π⋅ y
2⋅n⋅ π⋅ y
⋅ 4 ⋅ Λ 2 ⋅ cos
+ cos
+ 3 ⋅ sin ( ω2 ⋅ t + λ 2 ) ;
b
b
Λ1 =2
Λ 2 =2
k ⋅π
k ⋅π
k1 + 2⋅ cos 1 ⋅cos 1 −1
4
8
(5)
;
k ⋅π
k ⋅π
k2 + 2⋅ cos 2 ⋅cos 2 −1
4
8
,
где l, b — длина и ширина образца пьезоэлемента; A, B — коэффициенты; m = 2, 6, 10,
(m + 4), … — натуральное число при переменной х; n = 2, 6, 10, (n + 4), … — натуральное число
при переменной y; ω1, ω2 — частоты колебаний материала; λ1, λ2 — начальные фазы колебаний;
k1, k2 — порядковые номера производных от функций φ1, φ2 по переменным x и y.
Решение (5) позволяет получить математические зависимости компонентов тензора
механических напряжений от координат x, y, z и времени t, что обеспечивает выполнение
расчетов чувствительности электроакустических преобразователей на основе пленочных
полимерных материалов. Например, средние значения нормальных напряжений по
координатным осям, действующих в пьезоактивном элементе из поливинилиденфторида марки
Ф-2МЭ квадратной формы с размерами (60×60×1,5) мм, жестко защемленном по периметру,
составляют σx = –0,954 Па; σy = –0,989 Па; σz =0,744 Па. Расчеты выполнены для случая
объемного сжатия электроакустического преобразователя нагрузкой 1 Па. При этом конструкция
преобразователя, при ее объемном нагружении, обеспечивает механические воздействия на
пьезоактивный пленочный материал в нормальном направлении qn = –2 Па и трансверсальных
142
Гидроакустические системы
направлениях qx =1,413 Па и qy =1,843 Па. Используя полученные величины механических
напряжений, вычислим значение эффективного пьезоэлектрического коэффициента заряда [4, 5]:
ef
ef
+ d zy
+ d zzef =
d ef = d zx
⋅
где d zx = −19
)
(
( d zx ⋅ σ x + d zy ⋅ σ y + d zz ⋅ σ z ) ⋅
qn ⋅ q x + q y + q x ⋅ q y
q x ⋅ q y ⋅ qn
пКл
35, 08
,
=
Н
(6)
пКл
пКл
пКл
, d zy = −2
, d zz = 32
— пьезоэлектрические коэффициенты
Н
Н
Н
заряда.
Чувствительность плоского объемно сжатого электроакустического преобразователя на
основе материала из поливинилиденфторида марки Ф-2МЭ с электродами на поверхностях,
параллельных его срединной поверхности, и толщиной пьезоактивного чувствительного
элемента 1,5 мм составляет:
2 ⋅ h ⋅ d ef
мкВ
= 460
,
Па
ξz
(7)
где 2·h — толщина диэлектрика;
ξ z 115.05 ⋅10−12
=
Ф
— абсолютная диэлектрическая
м
=
γ
проницаемость пьезоактивного материала в направлении координатной оси z, величина которой
определена экспериментально.
В соответствии с [6] минимальная чувствительность приемных элементов апертуры
антенны должна составлять 150
мкВ
для трехкратного превышения шумов предварительных
Па
усилителей гидроакустического комплекса.
Заключение. В статье приведен вариант частного аналитического решения системы
дифференциальных уравнений в частных производных, полученного в рамках решения задачи
механики деформируемого твердого тела и примененного с целью расчетов чувствительности
электроакустического преобразователя на основе пленочного материала из
поливинилиденфторида марки Ф-2МЭ. Указанный подход применен в АО «Концерн
«Океанприбор» для разработки математического аппарата прогнозирования чувствительности
плоских пьезоактивных конструкций.
Литература
1. Kharat D. K., Mitra S., Akhtar S., Kumar V. Polymeric piezoelectric transducers for hydrophone
applications // Defence Science Journal. 2007. Vol. 57, № 1. P. 7–22.
2. Munyard A., Matthews D. N., Killeen D. The effect of backing material on the sensitivity of PVDF
hydrophones at high frequencies // Proceedings of Acoustics 2012. Fremantle, 2012. P. 1–5.
3. Вольмир А. С. Устойчивость деформируемых систем. 2-е изд., перераб. и доп. М.: Наука, 1967.
С. 491–500.
4. Дементьев И. И., Шабанов В. В., Шабанова Н. С. Подход к математическому моделированию
пленочных анизотропных конструкций электроакустических преобразователей // Научно-технический
сборник «Гидроакустика». 2022. Вып. 51(3). С. 42–46.
5. Moffett M. B., Ricketts D., Butler J. L. The effect of electrode stiffness on the piezoelectric and elastic
constants of a piezoelectric bar // Acoustical Society of America. 1988. № 83(2). P. 805–811.
6. Смарышев М. Д., Добровольский Ю. Ю. Гидроакустические антенны: справочник по расчету
направленных свойств гидроакустических антенн. Л.: Судостроение, 1984. 304 с.
143
Гидроакустические системы
АКТИВНЫЕ ПОЛИМЕРНЫЕ МАТЕРИАЛЫ ДЛЯ ПЬЕЗОГЕНЕРАТОРОВ
И. И. Дементьев1, канд. техн. наук, Р. С. Коновалов2, канд. техн. наук, С. И. Коновалов2, д-р техн. наук,
А. О. Костина1, А. Д. Соловьева2, В. М. Цаплев2, д-р техн. наук
1
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
2
СПб государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
ACTIVE POLYMER MATERIALS FOR PIEZOHARVESTERS
I. I. Dementiev1, Ph.D., R. S. Konovalov2, Ph.D., S. I. Konovalov2, Dr.Sc., А. О. Кostina1, А. D. Solovyova2,
V. М. Tsaplev2, Dr.Sc.
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
St. Petersburg State Electrotechnical University «LETI», St. Petersburg, Russia
Рассматриваются вопросы моделирования свойств полимерных пьезоэлектрических пленочных материалов типа PVDF для применения в пьезоэлектрических генераторах. Рассматриваются методы измерения пьезоэлектрических и электромеханических свойств этих материалов, а также приводятся результаты этих измерений.
The issues of modeling the properties of polymer piezoelectric film materials of the PVDF type for use in piezoelectric harvesters are considered. Methods for measuring the piezoelectric and electromechanical properties of
these materials are considered, and the results of these measurements are presented.
Введение. Автономные гидроакустические системы, системы мониторинга морских
акваторий, или прочие устройства, предназначенные для длительной работы без пополнения
энергией, или без перезарядки аккумуляторных батарей, нуждаются в соответствующих
генераторах, извлекающих электрическую энергию из окружающей среды. Одним из видов
такой даровой, и практически неограниченной энергии, является энергия волн на поверхности
моря, или энергия морских или речных течений. Разработка и исследование генераторов,
работающих на основе таких даровых источников, являются в настоящее время отдельной,
интенсивно развивающейся областью альтернативной энергетики. Здесь можно упомянуть лишь
некоторые публикации из большого потока, посвященных этому направлению [1−5]. Основная
часть публикаций содержит результаты исследований, или описывает различные типы
конструкций, предназначенных для извлечения механической энергии среды (т.е. энергии
течения воды или воздуха, или энергии колебаний воды или воздуха, энергии вихрей,
возникающих при движении среды) для дальнейшего преобразования этой механической
энергии в электрическую. Это вторичное преобразование энергии в электрическую обычно
выполняется с помощью пьезоэлектрических или магнитоэлектрических устройств. Наибольшее
распространение получили пьезоэлектрические материалы, обладающие более высокой
электромеханической связью по сравнению с традиционным электромагнитным или
электродинамическим способом (т.е. на основе закона Ампера) преобразования энергии.
В пьезоэлектрических генераторах используется в основном пьезокерамика типа PZT различных
модификаций, достаточно хорошо отработанных применительно к решению гидроакустических
задач приема сигналов. Однако, если пьезокерамика, предназначена для генерации энергии, то
она должна обладать несколько иными физическими свойствами, чем пьезокерамика,
предназначенная для приема и дальнейшего усиления достаточно слабых сигналов, хотя и в том,
и в другом случае принципиальных различий нет. Например, нелинейность упругих и/или
пьезоэлектрических параметров пьезокерамики является в большинстве случаев недостатком
приемных устройств (за исключением, может быть, параметрических приемников), но в
пьезогенераторах нелинейные параметры являются плюсом, позволяя реализовать модули
высших порядков и получить более высокую выходную мощность [6].
Кроме пьезокерамических материалов, в пьезогенераторах за последнее время начали
применяться также и пленочные полимерные материалы типа PVDF [7]. По сравнению с
неорганическими пьезоматериалами пьезоэлектрические полимеры, такие как PVDF и его
сополимер поли(винилиденфлюорид-ко-три-флюороэтилен) (P(VDF-TrFE)), обладают большей
гибкостью, достаточной механической прочностью и просты в обработке, что больше подходит
для создания гибких устройств получения энергии. На данный момент, существует пять
144
Гидроакустические системы
полукристаллических (т.е. наполовину кристаллических, наполовину аморфных) полиморфов
PVDF. Однако, только PVDF β-фазы проявляет достаточно сильные пьезоэлектрические
свойства [8]. Таким образом, при дальнейшем улучшении свойств β-фазы PVDF этот материал
может быть весьма перспективным для создания пьезогенераторов.
Компьютерный эксперимент. Далее рассматриваются результаты моделирования
пьезоэлектрического генератора изгибного типа. Ввиду ограниченности данной работы здесь не
приводится аналитическое решение, и моделирование выполнялось методом конечных
элементов в пакете COMSOL Multiphysics 6.1. Теоретические основы моделирования можно
найти в работе [6]. Наиболее подходящим типом пьезогенератора, использующего энергию
морских волн, следует считать изгибный биморфный преобразователь в виде консоли, либо
круглый биморфный преобразователь зонтикового типа. Последний исследовался нами в [9].
Таким образом, модель представляла собой биморфную (точнее, триморфную) консоль, в
виде пластины длиной 40 мм, шириной 15 мм и толщиной 0,2 мм, на которую с двух сторон
наклеены поляризованные пленки PVDF толщиной 0,26 мм. Исследовались консоли,
выполненные из различных материалов — стали, бериллиевой бронзы, алюминия. Здесь
представлены результаты, полученные для алюминиевой консоли.
Базовый конец консоли возбуждался переменной силой с амплитудой 33×10-3 Н и частотой
от 0 до100 Гц. Таким образом, задавалось ускорение базы от 0 до 5−6 g. На свободном конце
консоли был закреплен груз массой 1,3 г. Частота основного вынужденного резонанса консоли
оказалось равной 41 Гц, а выходное переменное напряжение — 1300 В. Нас, однако, интересовал
диапазон частот ниже резонанса (от 1 до 40 Гц). Рис. 1 демонстрирует результаты
моделирования. Кривая 1 — частотная зависимость напряжения на выходе пьезогенератора
(в Вольтах), кривая 2 — механическая мощность возбуждения базы (в миллиВаттах) и
кривая 3 — электрическая мощность на выходе (в сантиВаттах для размещения этой
зависимости на общем графике).
Исследовались также зависимости этих трех параметров — выходного напряжения,
механической мощности возбуждения и электрической мощности на выходе — от
сопротивления нагрузки. Зависимости выходного напряжения от сопротивления нагрузки
показаны на рис. 2. Ограниченный объем статьи не позволяет продемонстрировать нагрузочные
характеристики остальных параметров.
Рис. 1. Частотные характеристики консольного пьезогенератора ниже резонанса
145
Гидроакустические системы
Рис. 2. Нагрузочные характеристики пьезогенератора на различных частотах
Заключение. Представленные выше результаты относятся к рабочему режиму
пьезогенератора, т.е. к частотному диапазону, ниже частоты резонанса. Исследование
резонансного режима асимметричной консоли, т.е. биморфа, состоящего из эталонного
пьезоэлектрика (например, пьезокварца) и исследуемого пьезоэлектрика (пьезополимера) дает
возможность реализовать режим измерений, т.е. измерять электромеханические параметры
последнего. Эти результаты выходят за рамки ограниченного объема данной статьи.
Литература
1. Viet N. V., Xie X. D., Liew K. M., Banthia N., Wang Q. Energy harvesting from ocean waves by a floating
energy harvester // Energy. 2016. Vol. 112. P. 1219−1226. http://dx.doi.org/10.1016/j.energy.2016.07.019.
2. Xie X. D., Wang Q., Wu N. Energy harvesting from transverse ocean waves by a piezoelectric plate //
International Journal of Engineering Science. 2014. Vol. 81, № 8. P. 41−48. https://doi.org/10.1016/j.ijengsci.
2014.04.003.
3. Khaligh A., Omer O. C. Energy harvesting: solar, wind, and ocean energy conversion systems. N.Y.:
Taylor and Francis Group, LLC, 2010.
4. McCormick M. E. Wave Energy Conversion. N.Y.: Elsevier, 2003.
5. Erturk A., Inman D. J. Piezoelectric Energy Harvesting. N.Y.: John Wiley & Sons, 2011.
6. Цаплев В. М., Аббакумов К. Е., Коновалов Р. С. Нелинейные пьезокерамические материалы и
малогабаритные генераторы энергии. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2016.
7. Liu H., Zhong J., Lee Ch., Lee S.-W., Lin L. A comprehensive review on piezoelectric energy harvesting
technology: Materials, mechanisms, and applications // Applied Physics Reviews. 2018. Vol. 5. Р. 041306.
https://doi.org/10.1063/1.50741848.
8. Zhu G., Zeng Z., Zhang L., Yan X. Piezoelectricity in β-phase PVDF crystals: A molecular simulation
study // Computational Materials Science. 2008. Vol. 44, № 2. P. 224−229. https://doi.org/10.1016/
j.commatsci.2008.03.016.
9. Tsaplev V., Konovalov R., Abbakumov K. Disk Bimorph-Type Piezoelectric Energy Harvester // Journal
of Power and Energy Engineering. 2015. Vol. 3, № 4. P. 63−68. http://dx.doi.org/10.4236/jpee.2015.34010.
146
Гидроакустические системы
ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОАКУСТИЧЕСКОГО
ПРЕОБРАЗОВАТЕЛЯ НА ОСНОВЕ ПЬЕЗОАКТИВНОЙ ПЛЕНКИ ПВДФ
В. А. Шабанов, Н. С. Шабанова
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
PRODUCTION’S TECHNOLOGY OF THE ELECTRO-ACOUSTIC CONVERTER
BASED ON PVDF PIEZOELECTRIC FILM
V. A. Shabanov, N. S. Shabanova
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Рассмотрены вопросы технологии изготовления многослойных конструкций электроакустических
преобразователей на основе пьезоактивной пленки ПВДФ. Проведена оценка качества изготовленного
образца преобразователя путем сравнения значений его чувствительности, полученных в результате
расчетов и измерений.
Questions of manufacturing techniques of electro-acoustic multilayered converters on the basis of a PVDF
piezoelectric film are considered. The assessment of manufactured converter’s quality is carried out by
comparison of the values of its sensitivity received by calculations and measurements
В настоящее время является актуальной задача создания гидроакустических антенных
устройств с улучшенной устойчивостью к воздействию гидродинамической помехи, одним из
решений которой может служить увеличение площади заполнения апертуры антенны
пьезоактивным материалом [1]. В качестве пьезоактивного материала для создания таких
конструкций целесообразно применять пьезоактивную пленки на основе сополимеров
поливинилиденфторида (ПВДФ) [2]. Гибкость пленки и её высокая устойчивости к
механическим нагрузкам позволяет создавать тонкие легкие антенные модули при большом
заполнении площади активным материалом. Анизотропия пьезохарактеристик пленки ПВДФ
позволяет создавать из неё объемночувствительные конструкции преобразователей, устойчивые
к гидростатическому давлению.
Вариант конструкции объемночувствительного электроакустического преобразователя
(ЭАП) из пьезоактивной пленки ПВДФ представлен на рис. 1. ЭАП состоит из двух
многослойных активных элементов установленных на центральном электроде из алюминиевого
листа (АМГ-3) толщиной 0,5 мм и соединённых через него электрически параллельно.
Конструкция ЭАП герметизирована слоем полиуретанового эластомера.
Активный элемент состоит из 10 склеенных между собой слоев пьезоактивной пленки
ПВДФ марки Ф-2МЭ отечественного производства толщиной 130 мкм. По двум сторонам
активного элемента наклеены жесткие металлические электроды из листа АМГ-3 толщиной
0,5 мм, на которых осуществляется электрический монтаж проводов ЭАП.
Для склеивания слоёв активного элемента разработана эпоксидная токопроводящая
клеевая композиция ЭКН-Т. Разработанный токопроводящий клей обладает хорошими
характеристиками адгезионной прочности к поверхности пленки ПВДФ и формирует клеевое
соединение устойчивое к длительному воздействию водной среды. При этом клеевой состав
может наноситься на склеиваемые поверхности методом пневматического напыления, что
позволяет обеспечить его равномерное нанесение слоем малой толщины.
Разработан технологический метод склеивания многослойных конструкций на основе
пьезоактивной пленки ПВДФ в вакууме, который позволяет формировать сплошные тонкие
клеевые соединения без дефектов в виде газовых включений, что обеспечивает воспроизводимые
характеристики изготавливаемых активных элементов и ЭАП. Электропроводимость клеевого
слоя обеспечивает последовательное электрическое соединение пьезоактивных слоев в
конструкции активного элемента. Активные элементы заданной формы были получены методом
гидроабразивной резки из склеенной заготовки.
Для оценки качества изготовления ЭАП при использовании разработанных материалов и
технологических методов сравним экспериментально полученные значения его
чувствительности с результатами расчета аналогичной конструкции из слоев ПВДФ и алюминия.
147
Гидроакустические системы
Рис. 1. ЭАП на основе пьезоактивной пленки ПВДФ
Рис. 2. Амплитудно-частотная характеристика чувствительности изготовленного ЭАП
На рис. 2 показана амплитудно-частотная характеристика (АЧХ) чувствительности ЭАП,
показанного на рис. 1. При измерении в акустической камере малого объема «Паскаль-4»
значение чувствительности ЭАП на частоте 125 Гц составило 148 мкВ/Па.
Чувствительность показанного ЭАП (𝛾𝛾, В/Па) может быть определена из соотношения 1:
𝛾𝛾 =
𝑑𝑑эф ∙ℎ
𝜀𝜀∙𝜀𝜀0
,
мкВ
Па
,
(1)
где ℎ — сумма толщин всех слоев пленки ПВДФ в многослойном пакете; 𝜀𝜀0 , 𝜀𝜀 — универсальная
диэлектрическая постоянная и относительная диэлектрическая проницаемость ПВДФ
соответственно; 𝑑𝑑эф = ∑𝑖𝑖 𝑑𝑑3𝑖𝑖 ∙ 𝜎𝜎𝑖𝑖 — эффективный пьезоэлектрический модуль, Кл/Н, где 𝑑𝑑3𝑖𝑖 —
пьезоэлектрические модули ПВДФ, Кл/Н; 𝜎𝜎𝑖𝑖 — механические напряжения вдоль
соответствующих осей при воздействии акустического давления.
Значение эффективного пьезомодуля определим, решив систему уравнений деформации
твердого тела при воздействии на него напряжений в различных направлениях [3].
Е ∙ℎ∙(1−𝜇𝜇 )−ℎ ∙𝐸𝐸 ∙𝜇𝜇 +ℎ ∙𝐸𝐸 ∙𝜇𝜇
1
1 2 1
1 1 2
𝑑𝑑эф = 𝑑𝑑33 + (𝑑𝑑32 + 𝑑𝑑31 ) ∙ 2Е ∙ℎ ∙(1−𝜇𝜇
, Кл/Н,
)+Е ∙ℎ ∙(1−𝜇𝜇 )
1
1
2
2
2
1
(2)
где, Е1 , Е2 — модуль упругости материала слоя продольного армирования и ПВДФ
соответственно, Па; 𝜇𝜇1 , 𝜇𝜇2 — Коэффициент Пуассона материала жесткого электрода и ПВДФ.
148
Гидроакустические системы
Рис. 3. Рассчитанная чувствительность ЭАП (Дискретные значения получены с помощью Ansys 16)
На рис. 3 показана зависимость чувствительности активного элемента ЭАП с общей
толщиной активного материала 1,3 мм от общей толщины алюминиевых электродов. Также на
рис. 3 показаны значения чувствительности ЭАП, полученные путем расчета механических
напряжений в активном слое при использовании программного обеспечения (ПО) Ansys 16. При
расчетах использовались характеристики материалов, показанные в табл. 1.
Характеристики материалов для расчета ЭАП
Характеристика
Модуль упругости при продольном растяжении, ГПа
Коэффициент Пуассона
Пьезоэлектрический модуль d33, d32, d31, Кл/Н
Относительная диэлектрическая проницаемость ПВДФ, ε
Таблица 1
Значение
ПВДФ
Алюминий
2
73
0,42
0,32
32, -21, -2,5
12,5
-
При сравнении результатов измерений чувствительности ЭАП и значений, полученных в
результате расчетов, в том числе с использованием ПО Ansys 16, видна их хорошая сходимость,
что является подтверждением качества изготовления конструкции преобразователя при
использовании разработанных материалов и технологических методов.
Литература
1. Дементьев И. И., Шабанов В. А., Шабанова Н. С. Подход к математическому моделированию
пленочных анизотропных конструкций электроакустических преобразователей // Науч.-техн. сб.
«Гидроакустика». 2022. Вып. 51(3). С. 42−49.
2. Kharat D. K., Mitra S., Akhtar S., Kumar V. Polymeric piezoelectric transducers for hydrophone
applications // Defence Science Journal. 2007. Vol. 57, № 1. P. 7–22.
3. Тимошенко С. П. Сопротивление материалов: в 2 т. Т.2 Более сложные вопросы теории и задачи.
3 изд. М.: Наука, 1965. 481 стр.
149
Гидроакустические системы
ШИРОКОПОЛОСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ЦИЛИНДРИЧЕСКИЙ ИЗЛУЧАТЕЛЬ
В. И. Махов, канд. техн. наук, Е. А. Филимонова
СПб государственный морской технический университет, Санкт-Петербург, Россия
BROADBAND MEASURING CYLINDRICAL EMITTER
V. I. Makhov, Ph.D., E. A. Filimonova
St. Petersburg State Marine Technical University, St. Petersburg, Russia
Рассматриваются вопросы, связанные с проектированием широкополосного цилиндрического
измерительного излучателя, работающего в диапазоне частот от 1 до 10 кГц. Часть активного
материала излучателя предложено заменить пассивным материалом с малым значением модуля Юнга,
что увеличивает гибкость колебательной системы и повышает широкополосность излучателя. Для
уменьшения уровней боковых лепестков характеристики направленности (ХН) в плоскости оси цилиндра
рассмотрена возможность введения амплитудного распределения по высоте цилиндрического
излучателя.
The issues related to the design of a broadband cylindrical measuring radiator operating in the frequency range
from 1 to 10 kHz are considered. It is proposed to replace part of the active material of the emitter with a passive
material with a small value of the Young's modulus, which increases the flexibility of the oscillatory system and
increases the broadband of the emitter. To reduce the levels of the side lobes of the directional characteristic (XN)
in the plane of the cylinder axis, the possibility of introducing an amplitude distribution over the height of a
cylindrical radiator is considered.
Для измерения чувствительности и ХН приёмных гидроакустических антенн, а также для
других измерительных задач, широко используют цилиндрические излучатели. При
определённой высоте цилиндра можно создать в плоскости его оси лепесток ХН малой ширины
для отстройки или уменьшения влияния поверхностных и донных отражений. В плоскости
перпендикулярной оси цилиндра его ХН — практически круговая, поэтому нет необходимости
в устройстве ориентации излучателя на приёмную антенну.
Чувствительным
элементом
цилиндрического
преобразователя
является
пьезокерамическое кольцо. Составляя кольца соосно, можно получить цилиндр любой высоты,
а высота самого кольца выбирается из технологических соображений и обычно не превышает
1,5·аср, где аср – средний радиус кольца. В настоящее время применяются как сплошные, так и
сегментированные кольца. Сплошные кольца технологичнее и проще в изготовлении, они
широко применяются для высокочастотных преобразователей, имеющих небольшой диаметр
(единицы сантиметров). Кольца больших диаметров (более 10 см) изготавливают
сегментированными, они обладают большей эффективностью, чем сплошные.
Для работы в диапазоне частот от 1 до 10 кГц целесообразно использовать
сегментированные кольца. Важным требованием к измерительным излучателям является
обеспечение наибольшей широкополосности. Известно, что резонансная частота
цилиндрического излучателя определяется его диаметром, а увеличить его широкополосность
(уменьшить добротность) можно, уменьшая толщину стенки цилиндра.
В работах [1, 2] на основе вариационного принципа Рейснера решена задача о свободных
колебаниях тонкого упругого кольца, обладающего периодической структурой, предложено
кольцо с равномерным чередованием активного и пассивного материалов рассматривать как
квазиоднородное кольцо и рассчитывать усредненные параметры модуля упругости и плотности.
Замена части активного материала измерительного излучателя пассивным материалом
(например, текстолитом с малым значением модуля Юнга) уменьшит эффективность излучения
в области частоты механического резонанса, что не существенно, так как измерительный
излучатель располагается на относительно небольшом расстоянии от приёмной антенны, но
увеличит широкополосность излучателя за счёт повышения гибкости колебательной системы.
В качестве активного материала используем пьезокерамику ЦТБС-3, можно также
использовать другие составы пьезокерамики, обладающие повышенной стабильностью
параметров во времени и при изменении температуры, что важно для измерительных
преобразователей.
150
Гидроакустические системы
Для перекрытия частотного диапазона от 1 до 10 кГц выберем средний радиус кольца
аср=0,064 м, что соответствует механическому резонансу кольца в воздухе fр = 8 кГц. Влияние
массы воды и замена части пьезокерамики текстолитом приведёт к смещению резонансной
частоты ближе к середине рабочего диапазона частот. Примем толщину стенки кольца d=0,2;
аср≈0,012 м и высоту кольца hк = 1,5;·аср ≈ 0,1 м. Тогда кольцо может быть набрано из n=54
сегментов (призм) со средней линией призмы (расстоянием между электродами)
t=2πаср/n ≈ 0,007 м.
Высоту цилиндрического излучателя hц рассчитаем, исходя из требования к ширине
основного лепестка ХН в плоскости оси цилиндра. ХН цилиндра в общем случае зависит от его
высоты h и диаметра 2аср и определяется выражением: R(𝜃𝜃) = R1(𝜃𝜃)∙R2(𝜃𝜃), где первый
сомножитель выражает ХН кольца малой высоты, R1(𝜃𝜃) = H1(2)(kаср)/[cos 𝜃𝜃∙H1(2)(kаср∙cos 𝜃𝜃)],
H1(2) — функция Ханкеля второго рода первого порядка. При аср<λ и малых углах отклонения от
ХН
определяется
вторым
сомножителем
R2(𝜃𝜃):
нормали
к
оси
R1(𝜃𝜃)≈1,
R2(𝜃𝜃)=sin[(khц/2)∙sin(𝜃𝜃)]/[(khц/2)∙sin(𝜃𝜃)], где k = 2π/λ — волновое число, λ — длина волны в воде.
Примем угол раствора главного лепестка по уровню 0,7 от максимума 2𝜃𝜃0,7 = 20° на средней
частоте 5кГц и рассчитаем высоту цилиндра, обеспечивающего такую ширину главного лепестка
ХН: hц=0,44∙λ/sin(10°) =0,78м.
Таким образом, для сборки цилиндра потребуется 7 колец (с учётом гибких развязок между
кольцами). Графики ХН излучателя в осевой плоскости R(𝜃𝜃) приведены на рис. 1. Для
уменьшения боковых лепестков ХН может быть использовано амплитудное распределение по
высоте цилиндра. На рис. 1 приведены графики ХН при равномерном амплитудном
распределении и при спадающих от центра цилиндра к краям амплитудных распределениях,
цифрами обозначены: 1 — график ХН при равномерном распределении амплитуд возбуждения
колец; 2 — график ХН при треугольном распределении с коэффициентами возбуждения
𝑀𝑀−𝑚𝑚+1
αm=
, где М=3 — число пар симметричных колец относительно центрального кольца, m
𝑀𝑀
изменяется от 1 до М; 3 — график ХН при распределении Хэмминга с коэффициентами:
αm = 0,54 – 0,46·cos[
𝜋𝜋(𝑚𝑚−𝑀𝑀−2)
𝑀𝑀+1
].
Из рис. 1 видно, что при равномерном распределении ХН имеет ширину основного
лепестка 2θ0,7 = 20°, уровень первого бокового лепестка составляет 22 %. Ширина основного
лепестка ХН увеличивается до 28 градусов при треугольном распределении и до 30 градусов при
распределении Хэмминга, величина бокового поля уменьшается до 7 % при треугольном
распределении и до 1 % при распределении Хэмминга.
Рис. 1. ХН излучателя в осевой плоскости на средней частоте fср = 5 кГц
151
Гидроакустические системы
Механическая добротность колебательной системы:
Qм = (ρк∙С3Е∙ηам∙d)/(аср∙(ρ∙С)в) ≈ 2,
где принят ηам = 0,7 — акустико-механический КПД излучателя; ρк=7200 кг/м3 — плотность
пьезокерамики, С3Е=3200 м/с — скорость продольной звуковой волны в пьезокерамике,
(ρ∙С)в= 1,5∙106кг/(м2∙с) — волновое сопротивление воды.
Ширина полосы пропускания частот ∆f = fр/Qм = 4000 Гц.
Коэффициент электромеханической трансформации:
N = 2 π∙d33∙Еюhц∙d/t= 210Н/В,
где d33=3,3∙10-10Кл/Н — пьезомодуль при продольном пьезоэффекте, Ею= 0,75∙1011Па — модуль
упругости Юнга пьезокерамики.
Для увеличения широкополосности (уменьшения добротности) излучателя заменим часть
пьезокерамических призм в кольце на вставки из пассивного материала с меньшим, чем у
пьезокерамики, модулем Юнга. Возьмём в качестве материала для вставок текстолит с
параметрами: ρв = 1,35∙103 кг/м3 - плотность, Ев= 0,7∙1010Па - модуль упругости текстолита.
При расчёте неоднородного кольца введём приведенные (усреднённые) параметры [2]:
ρпр = ѳρ∙ρк, Епр = Ек/ѳЕ,
где ρпр и ρк — приведённая плотность пьезокерамики с текстолитовыми вставками и плотность
пьезокерамики; Епр и Ек — приведённый модуль упругости пьезокерамики с текстолитовыми
вставками и модуль упругости пьезокерамики; ѳρ = (1– ѳ) + ѳ∙ρв/ρк — коэффициент приведения
по плотности; ѳЕ= (1– ѳ) + ѳ∙Ек /Ев, — коэффициент приведения по упругости; ѳ = Ψв/Ψк —
коэффициент заполнения; Ψв и Ψк — угловые размеры, занимаемые вставками и пьезокерамикой
в кольце.
Пусть ѳ = Ψв/Ψк= 120/240 = 0,5; то есть 1/3 всех призм в кольце заменим на текстолитовые
вставки (18 из 54), расположив равномерно через каждые две призмы одну вставку (размеры
текстолитовой вставки и пьезокерамической призмы — одинаковые), рис. 2.
Тогда: ѳρ = (1– ѳ) + ѳ∙ρв/ρк= 0,6; ρпр=ѳρ∙ρк= 4,3∙103 кг/м3; ѳЕ=(1–ѳ)+ѳ∙Ек/Ев=5,5;
Епр=Ек/ѳЕ=0,13∙1011Па.
Скорость продольной звуковой волны в неоднородном кольце:
Спр = (Епр/ρпр)1/2 = 1770 м/с.
Резонансная частота кольца со вставками: fпр=fр/(ѳЕ∙ѳρ)1/2=4400Гц.
Рис. 2. Фрагмент кольца с заменой части призм текстолитовыми вставками
152
Гидроакустические системы
Рис. 3. Частотные характеристики акустической мощности излучателя
без вставок и с пассивными вставками
1 — без вставок; 2 — с пассивными вставками
Механическая добротность колебательной системы с гибкими вставками:
Qм = (ρпр∙Спр∙ηам∙d)/(аср∙(ρ∙С)в) ≈ 0,7.
Ширина полосы частот ∆f = fр/Qм = 6300 Гц.
Коэффициент электромеханической трансформации:
Nв = (1 – ѳ)∙N = 105 Н/В.
Частотная зависимость акустической мощности:
Рак = Рар[1+Qм2(f/fр – fр/ f)2]-1.
На рис. 3 приведены нормированные частотные характеристики акустической мощности
излучателя, выполненного без вставок (fр=8 кГц) и со вставками (fр=4,4 кГц).
Таким образом, замена части активного материала в кольце текстолитовыми вставками
приводит к изменению частотной характеристики излучаемой мощности. Увеличивается
широкополосность преобразователя (в данном случае примерно в 3 раза при замене 1/3
пьезокерамических призм в кольце на текстолитовые вставки), уменьшается акустическая
мощность на частоте механического резонанса в 2 раза. Использование амплитудного
распределения, вводимого по высоте цилиндрического преобразователя, уменьшает боковые
лепестки ХН.
Литература
1. Бушер М. К. Свободные колебания упругого кольца периодической структуры // Акустический
журнал. 1976. Т. 22, вып. 4.
2. Бушер М. К. Динамические особенности пьезокерамических преобразователей на основе колец
неоднородной структуры // Акустический журнал. 1986. Т. 32, вып. 2.
153
Гидроакустические системы
ВЛИЯНИЕ МЕХАНИЧЕСКОЙ СВЯЗИ ИЗГИБНО-КОЛЕБЛЮЩИХСЯ НАКЛАДОК
СТЕРЖНЕВЫХ ШИРОКОПОЛОСНЫХ ПЬЕЗОПРЕОБРАЗОВАТЕЛЕЙ
НА ЧАСТОТНУЮ ХАРАКТЕРИСТИКУ АНТЕННОЙ РЕШЕТКИ
А. В. Краснов, И. И. Стырикович, канд. техн. наук
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
INFLUENCE OF MECHANICAL COUPLING OF BENDING AND OSCILLATING
PADS OF ROD BROADBAND TRANSDUCERS ON THE FREQUENCY RESPONSE
OF THE ANTENNA ARRAY
A. A. Krasnov, I. I. Stirykovich, Ph.D.
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Приведены результаты исследования влияния механической связи рабочих накладок группы
широкополосных стержневых пьезопреобразователей в составе антенной решетки на частотную
характеристику. Посредством моделирования показано повышение уровня чувствительности в
излучении в частотной области выше основного резонанса, расширяющее рабочую полосу частот
гидроакустической антенны. Результаты моделирования соотнесены с результатами лабораторных
измерений макетов антенн в гидроакустическом бассейне.
In the report the results of investigation of the influence of mechanical coupling of working pads of a group of
broadband rod piezoelectric transducers in an antenna array on the frequency response are presented. By means
of modeling level sensitivity in radiation in the frequency region above the main resonance, extending the
operating frequency band of the hydroacoustic antenna. The results of modeling are correlated with the results of
laboratory measurments of antenna mockups in a hydroacoustic pool.
Один из распространенных вариантов конструкции гидроакустических антенных решеток
представляет собой набор стрежневых широкополосных (ШП) пьезопреобразователей,
установленных на общее корпусное основание, при этом внутренняя полость антенного
устройства заполнена газом. Такая конструкция антенн реализует режим одностороннего
приёмо-излучения и способствует свободному колебанию рабочих поверхностей (ШП)
пьезопреобразователей. Для обеспечения герметичности устройства используют приклейку или
вулканизацию резины на поверхности рабочих накладок, или заливают полиуретаном с
предварительной заделкой зазоров между накладками. Очевидно, влияние герметизирующего
покрытия должно минимально сказываться на частотной характеристике (АЧХ) колебательной
системы.
Это
характерно
для
конструкций
малоэлементных
решёток,
когда
пьезопреобразователи объединены общим герметизирующим слоем, упругие свойства и
звукопрозрачность которого значительно отличаются от идеального водоподобия. Кроме того,
существенное влияние вносит технология соединения герметизирующего слоя с рабочими
накладками. [1]. В настоящей работе приводятся данные о влиянии такого соединения на АЧХ
широкополосных пьезопреобразователей с изгибно-колеблющимися накладками. С целью
определения степени такого влияния было проведено соответствующее исследование.
Герметизирующий слой представляет собой эластичный, слабосжимаемый материал,
имеющий определенную упругость. За счет упругости такого материала, края рабочих накладок
вклеенных преобразователей в антенной решетке между собой связаны.
Как считается, перенос энергии от элемента к элементу осуществляется в основном
изгибными модами [2]. Нами экспериментальным путем было установлено, что в составе макета
антенной решетки, собранного из 16 шт. ШП преобразователей и герметизированного
приклейкой эпоксидным клеем резинового слоя, прорезка резины между накладками, снизила
уровень эффективность излучения в области 2-го максимума. (рис.1, а).
На макете из 10 шт. ШП преобразователей с измененной конфигурацией накладки
механическое удаление застывшего клея в зазорах также привело к снижению эффективности в
частотной области выше основного максимума на 6 дБ, а последующее заполнение зазоров тем
же клеем по сути восстановило первоначальную частотную характеристику (рис. 1, б). Данный
эффект объясняется механической связью между накладками, которая образуется при
отверждении клея в зазорах.
154
Гидроакустические системы
а
б
Рис. 1. Графики АЧХ эффективности излучения макета антенной решетки из ШП преобразователей
а — макет с прорезанной резиной; б — макет с удаленным клеем
Рис. 2. Расчетная МКЭ-модель антенной решетки с имитацией клеевого слоя и нагрузкой на воду
Рис. 3. Нормированные графики АЧХ эффективности излучения расчетной модели
Для определения степени влияния механической связи между элементами антенны была
построена конечно-элементная модель рассматриваемой конструкции в программе Ansys
Workbench 19.1 с модулями ACT Piezoelectric и ACT Acoustic.
155
Гидроакустические системы
Начальные и граничные условия модели. В качестве образца для исследования была
выбрана конфигурация из 3-х преобразователей, схема расположения которых приведена на
рис. 2.
Конструктивная модель одиночного преобразователя подробно описана в работе [3] и
соответствует КД преобразователей исследуемых макетов. Механические и пьезоэлектрические
свойства материалов, используемых в расчетной модели, соответствуют действующим
нормативным документам. Армирующая шпилька жестко закреплена на массивном основании.
Зазор между преобразователями составляет 1 мм, диаметр жесткой пластины — 100 мм, диаметр
водной полусферы — 140 мм. Алгоритм создания расчетной сетки адаптивный с размером
ячейки 1 мм, что соответствует 20-ти элементам сетки на длину волны в воде на верхней частоте
расчета.
С целью оптимизации модели введено структурное демпфирование 0,003 рад/с, что
предполагает количественную имитацию влияния на колебательную систему малоразмерных
элементов модели, таких как электроды и клеевые швы. Данный параметр был подобран путем
соотнесения расчетных значений электрической проводимости и электрической добротности
модели одного преобразователя без нагрузки на воду с измерениями в воздухе 16 шт. реальных
преобразователей до их вклейки в макет. Отклонение расчетных значений от средней в партии
величины максимума проводимости ~5 %, добротности ~2 %, частоты резонанса ~0,5 %.
В зазорах и вокруг прямоугольных наладок имеется единая жесткая пластина толщиной
0,5 мм со свойствами отвержденного эпоксидного клея К-153. Введение в модель этой пластины
имитирует клеевую корку из отвержденного клея, образующуюся при выдавливании излишков
клея в процессе поджатия герметизирующего слоя к накладкам. Для сравнения был проведен
дополнительный расчет АЧХ акустического давления модели из 3-х преобразователей без
связующей жесткой пластины, а также с одним преобразователем без пластины (рис. 3).
Заключение. Акустическое взаимодействие преобразователей в малоэлементных плоских
решетках, а также наличие зазоров между преобразователями могут существенно искажать их
характеристики [4]. Вместе с тем, необходимо учитывать и влияние жесткого клеевого шва как
одной из составляющих обеспечения широкополосности преобразователей с изгибноколеблющимися накладами. Моделирование и эксперимент показали, что введение
механической связи между накладками приводит к смещению дополнительного максимума
ближе к основному, при этом снижая неравномерность АЧХ.
Литература
1. Краснов А. В. Анализ влияния технологических факторов на параметры гидроакустических
антенн // Сб. мат. XL конф. «МПО МС-2022». 2022. С. 70−78.
2. Shah G. V. A contribution to the design of multi-element under-water acoustic arrays // J Sound vib.
1970. Vol. 12(1). Р. 125−130.
3. Стырикович И. И., Огрызко Я. А. Стержневые широкополосные пьезопреобразователи
гидроакустических комплексов и систем морского подводного оружия // Подводное морское оружие. 2009.
Вып. 14. С. 96−101.
4. Добровольский Ю. Ю., Долгова Д. Б. Об одном аномальном проявлении акустического
взаимодействия преобразователей в широкополосных антеннах // Тр. междунар. конф. «Прикладные
технологии гидроакустики и гидрофизики». ГА-2006». СПб. 2006. С. 413−416.
156
Гидроакустические системы
ОПЫТ ИСПОЛЬЗОВАНИЯ РАЗЛИЧНЫХ МАРОК ПОЛИУРЕТАНОВЫХ
ЭЛАСТОМЕРОВ ДЛЯ ОБТЕКАТЕЛЕЙ ГИДРОАКУСТИЧЕСКИХ АНТЕНН
И. Р. Копцев, Е. А. Ульянов, А. И. Бучковская, С. А. Чижев
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
EXPERIENCE IN USING VARIOUS BRANDS OF POLYURETHANE ELASTOMERS
FOR THE FAIRINGS OF HYDROACOUSTIC ANTENNAS
I. R. Koptsev, E. A. Ulyanov, A. I. Buchkovskaya, S. A. Chizhev
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
В статье рассмотрен опыт использования различных эластомеров, применяемых для изготовления
обтекателей гидроакустических антенн (ГАА). Приведены сравнительные результаты измерений
электроакустических параметров ГАА с различными материалами обтекателей, а также
сравнительные результаты акустических параметров полиуретановых эластомеров и звукопрозрачной
резины.
The article discusses the experience of using various elastomers used for the manufacture of fairings of
hydroacoustic antennas (HAA). Comparative results of measurements of electroacoustic parameters of HAA with
various materials of fairings, as well as comparative results of acoustic parameters of polyurethane elastomers
and the sound of transparent rubber are presented.
С 60−70 годов прошлого века для обтекателей ГАА МПО традиционно используются
звукопрозрачные резиновые смеси марок ИРП–2025, С-572 и д. р. Изготовление обтекателей
ГАА подводных аппаратов осуществляется путем горячей вулканизации резиновых смесей в
пресс–формах. Данный технологический процесс является довольно сложным, требующим
энергоемкое прессовое оборудование и специальной оснастки. В последние годы для
изготовления обтекателей ГАА широкое распространение получили полиуретановые
эластомеры, обладающие существенно более высокой технологичностью их применения в
производстве, поскольку применение полиуретанов (ПУ) позволяет сравнительно просто
обеспечить формирование обтекателей сложных форм, которые невозможно выполнить
вулканизацией. Однако, сведения об их акустических свойствах недостаточно изучены.
В АО «Концерн «МПО – Гидроприбор» для изготовления обтекателей ГАА ряда
подводных аппаратов применяются ПУ разных марок. Для оценки влияния различных
эластомеров на параметры ГАА была проведена сравнительная оценка акустических свойств
данных материалов и звукопрозрачной резины, характеристики которой достаточно хорошо
известны с 60-х годов прошлого века. Подобных данных относительно параметров ПУ
недостаточно. Одним из объективных методов оценки акустических свойств эластомеров
является измерения коэффициента звукопрозрачности (КЗП), который характеризует отражения
звуковых волн на границах раздела сред и внутренние потери в исследуемом материале и по сути
являющегося величиной обратной звукоизоляции [1], [2]. Непосредственным способом оценки
КЗП эластомеров, по результатам измерения образцов различных материалов в
гидроакустическом бассейне, является сравнение отношения сигнала, прошедшего через образец
материала, установленного перед гидрофоном, к уровню сигнала без установки образца [1]. На
рис. 1 представлены результаты измерений в диапазоне частот (5−200) кГц КЗП образцов
различной толщины ПУ марок 1, 2, 3 и резины ИРП–2025, применяемых в АО «Концерн «МПО
– Гидроприбор».
Как видно из рис. 1 КЗП у образца в виде листа ПУ марки 1 толщиной 10 мм во всем
диапазоне частот находится в пределах от 1 до 0,9, у аналогичного образца из резины ИРП–2025
идентичный результат. Следует отметить, что оба этих материала имеют волновое
сопротивление (ρс) близкое к воде.
157
Гидроакустические системы
Рис. 1. КЗП образцов ПУ марки 1, резины ИРП–2025, ПУ марок 2 и 3
С увеличением толщины образца ПУ марки 1 до 35 мм значение КЗП на частотах близких
к λ/2 и λ не изменилось, что говорит о низких потерях в материале. Форма частотной зависимости
КЗП для данного ПУ и резины ИРП–2025 практически идентичны, отсутствие ярко выраженных
максимумов на частотах, соответствующих λ/2 и λ, подтверждает, что ρс ПУ марки 1 близко к ρс
резины ИРП–2025 и воды.
Образцы ПУ 2 и 3 имеют более существенное отклонение ρс относительно водной среды,
для ПУ марки 2 более 20 % (1860 кг/м2с) для марки 3 более 50 % (2400 кг/м2с) соответственно,
как видно из приведенных графиков, с увеличением толщины образцов и частоты, КЗП
естественно падает, и наиболее существенное падение наблюдается у образца 30 мм из ПУ
марки 3. Вместе с тем видно, что на частотах эквивалентных λ/2 и λ у ПУ марки 2 значения КЗП
близки к аналогичным у ПУ 1 и резины ИРП–2025, а у ПУ марки 3 наблюдается падение КЗП
порядка 12 % для образца толщины 10 мм и 20–25 % для толщины 30 мм, что говорит о более
высоком уровне внутренних потерь в этом материале.
Измерений частотных характеристик (ЧХ) чувствительности в режиме излучения макетов
ГАА, загерметизированных различными эластомерами, показали, что чувствительность в
режиме излучения макетов с резиной и слоем ПУ марок 1 и 2 практически идентичны. Измерения
в режиме приема показали аналогичные результаты. При этом потери с ПУ марки 1 все же
несколько меньше, все это соотносится с данными КЗП.
Полученные результаты позволяют обоснованно применять разнообразные марки ПУ в
качестве материалов обтекателей ГАА в различных технически обоснованных случаях.
Применение ПУ, обладающих различными акустическими свойствами, может позволить
оптимизировать выходные электроакустические параметры ГАА.
Литература
1. Евтюков A. П., Колесников A. E. и др. Справочек по гидроакустики. Л.: Судосторение, 1982.
С. 219−222.
2. Бобер Р. Дж. Гидроакустические измерения / Пер. Б. И. Романюка; А. Н. Шпилькина. М.: Мир,
1974. С. 320−323.
158
Гидроакустические системы
СПОСОБЫ УПРАВЛЕНИЯ ЧАСТОТНЫМИ ХАРАКТЕРИСТИКАМИ
ШИРОКОПОЛОСНЫХ ГИДРОАКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
АНТЕННЫХ УСТРОЙСТВ В РЕЖИМАХ ИЗЛУЧЕНИЯ И ПРИЕМА
Т. К. Богданов, А. В. Иванова
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
METHODS FOR CONTROLLING THE FREQUENCY CHARACTERISTICS
OF BROADBAND HYDROACOUSTIC TRANSDUCERS OF ANTENNA DEVICES
IN EMISSION AND RECEPTION MODES
T. K. Bogdanov, A. V. Ivanova
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Представлены
способы
корректировки
частотных
характеристик
приемно-излучающих
широкополосных гидроакустических преобразователей с помощью резонансных электрических цепей и
модификации механической колебательной системы преобразователя. Приведено сравнение результатов
моделирования и измерений частотных характеристик реальных макетов антенн.
Methods for adjusting the frequency characteristics of receiving-emitting broadband hydroacoustic transducers
using resonant electrical circuits and modifying the mechanical oscillatory system of the transducer are presented.
A comparison of the results of modeling and measurements of the frequency characteristics of real antenna models
is presented.
В данной статье предлагаются различные способы решения задачи управления
амплитудными частотными характеристиками (АЧХ) чувствительности на примере антенн с
широкополосными стержневыми пьезопреобразователями, обладающими сравнительно
высокой чувствительностью приемно-излучающего тракта в полосе частот порядка октавы [1].
Расчеты и моделирование произведены по формулам, описанным в [2], а также с использованием
программ Electronics Workbench и ANSYS.
Управление частотными характеристиками введением резонансных электрических
цепей. В режимах излучения и приема принцип управления основан на формировании
регулируемых дополнительных резонансных электрических цепей на входе (выходе)
преобразователя или антенны. Пример электрических схем для обоих режимов, включающих
генератор Г, эквивалент преобразователя П, добавочные дроссели L3 и L4, резистор R2 для
управления уровнем чувствительности, а также виды АЧХ чувствительности в режимах
излучения и приема, полученные в ходе моделирования, представлен на рис. 1.
Рис. 1. Схемы излучающего и приемного трактов широкополосной антенны
и виды их АЧХ, полученные в ходе моделирования
159
Гидроакустические системы
Рис. 2. Измеренные нормированные и абсолютные АЧХ чувствительности макета широкополосной
антенны с коррекцией АЧХ (сплошная линия) и без коррекции (штриховая линия)
в режимах излучения (сверху) и приема (снизу)
Рис. 3. Расчетная модель преобразователя и расчетная АЧХ эффективности
Введение добавочных дросселей L3 в излучении и L4 в приеме позволяет увеличить
чувствительность и еще больше расширить полосу пропускания [3].
Для подтверждения таких схемотехнических решений были проведены измерения макета
широкополосной антенны без коррекции и с коррекцией добавочными дросселями и
согласующим трансформатором в режиме излучения (рис. 2.).
Полоса пропускания данной антенны в режиме излучения при использовании коррекции –
на 20 % больше при снижении неравномерности и увеличении чувствительности в рабочей
полосе частот. В режиме приема схема позволяет расширить полосу пропускания и
чувствительность приемного тракта в рабочей полосе частот в 2−3 раза.
Управление частотными характеристиками с помощью модификации механической
колебательной системы. Стержневой преобразователь с изгибно-колеблющейся накладкой
представляет собой сложную систему связанных механических контуров. При проектировании
такого преобразователя определяющим является выбор конфигурации излучающей накладки,
что позволяет провести моделирование преобразователей методом конечных элементов в
программном комплексе ANSYS с учетом нагрузки на водную среду. На рис. 3 представлена
расчетная модель широкополосного преобразователя и расчетная АЧХ в излучении.
160
Гидроакустические системы
Рис. 4. Расчетная (слева) и измеренная (справа) АЧХ чувствительности в излучении
Рис. 5. Измеренные АЧХ чувствительности в излучении
Изменяя геометрические размеры рабочей накладки, можно смещать резонансы по полосе
и менять их эффективность. На рис. 4 представлены расчетная и измеренная АЧХ
чувствительности в излучении с уменьшенной толщиной периферической части накладки.
Изменение размера и массы тыльной накладки также оказывает влияние на характер АЧХ
чувствительности преобразователя. С уменьшением массы тыльной накладки растет частота
основного резонанса и возрастает эффективность резонанса изгиба излучающей накладки. На
рис. 5 представлены измеренные АЧХ эффективности антенн в излучении с преобразователями
с тыльными накладками различной массы (m1>m2>m3).
Таким образом, использование представленных способов позволяет в некоторых пределах
управлять положением и уровнем максимумов чувствительности, а также величиной рабочей
полосы частот широкополосных преобразователей.
Литература
1. Богданов Т. К., Стырикович И. И. Широкополосный стержневой пьезопреобразователь с
использованием колебаний изгиба излучающей накладки и его эквивалентная схема замещения // Тр.
Всерос. конф. «Прикладные технологии гидроакустики и гидрофизики». СПб.: ПОЛИТЕХ-ПРЕСС, 2020.
600 с.
2. Свердлин Г. М. Прикладная гидроакустика: Учеб. пособие. 2-е изд., перераб. и доп. Л.:
Судостроение, 1990. 320 с.
3. Богданов Т. К., Ульянов Е. А. О коррекции частотных характеристик приемно-излучающих
преобразователей гидроакустических антенн на электрической стороне // Тр. Всерос. конф. «Прикладные
технологии гидроакустики и гидрофизики». СПб.: Издательство «ЛЕМА», 2023. 492 с.
161
Гидроакустические системы
НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ СОСТАВЛЯЮЩАЯ СОВРЕМЕННОГО
ГИДРОАКУСТИЧЕСКОГО ПРИБОРОСТРОЕНИЯ — ПРОДОЛЖЕНИЕ ТРАДИЦИЙ
ЦНИИ «МОРФИЗПРИБОР»
В. А. Попов, канд. техн. наук
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
RESEARCH AND DEVELOPMENT PART OF MODERN HYDROACOUSTIC
EUQIPMENT ENGINEERING — KEEPING THE TRADITIONS OF CENTRAL
RESEARCH INSTITUTE «MORFIZPRIBOR»
V. A. Popov, Ph.D.
JSC «Concern «Oceanpribor», St. Petersburg, Russia
18 мая 1949 г. было подписано Постановление Совета Министров СССР о создании в городе Ленинграде
первого в стране «Научно-исследовательского института гидролокации и гидроакустики» (НИИ-3)
Министерства судостроительной промышленности. НИИ-3 быстро нарастил свой научный и
производственный потенциалы и в 1966 году получил статус Центрального НИИ, сменив первоначальное
наименование НИИ-3 на ЦНИИ «Морфизприбор» (с 1994 г. — ФГУП «ЦНИИ «Морфизприбор»). В 1973 г.
было образовано Ленинградское научно-производственное объединение (ЛНПО) «Океанприбор», в состав
которого вошли: ЦНИИ «Морфизприбор» (головной), заводы «Водтрансприбор» и «Ладога», а в августе
1980 г. — завод «Полярная звезда». С марта 2006 г., ФГУП «ЦНИИ «Морфизприбор» преобразован в
Открытое акционерное общество (ОАО) «Концерн «Океанприбор». Существующее ныне акционерное
общество «Концерн «Океанприбор» образовано в 2016 г. путём преобразования из ОАО «Концерн
«Океанприбор. Несмотря на упразднение в 2006 г. структуры «ЦНИИ «Морфизприбор», в Концерне
сохранился людской научный потенциал. Специалисты-гидроакустики продолжают вести научноисследовательские работы, результаты которых внедряются в перспективные гидроакустические
средства
On May 18, 1949 the Order of USSR Council of Ministers on creation of the first in the country «Research
Institute of Hydrolocation and Underwater Acoustics» (RI-3) of the Ministry of the Shipbuilding Industry in
Leningrad was signed. The main function of the Institute - research activities in hydroacoustics for creation of
hydroacoustic payload for the Navy. RI-3 had rapidly developed its scientific and production potential and
received the status of Central Research Institute — parent organization in the country in the field of development
of hydroacoustic payload for the Navy having changed its original name (RI-3) for CRI «Morphizpribor» (since
1994 – FSUE «CRI «Morphizpribor»). Leningrad Scientific and Production Association «Oceanpribor» (LSPA)
was established in 1973. «CRI «Morphizpribor» was reorganized in Open Joint-Stock Company (OJSC) «Concern
«Oceanpribor». Existing JSC «Concern «Oceanpribor» was established in 2016 by reorganization from OJSC
«Concern «Oceanpribor». The Concern retained labour scientific potential despite cancellation of the structure
of Central Research Institute «Morfizpribor» in 2006. Specialists in hydroacoustics keep on performing R&D,
which results are integrated into advanced hydroacoustic means.
В июне 2023 г. исполнилось 90 лет Российской гидроакустике. Это дата создания первого
в России специализированного предприятия по выпуску гидроакустического оборудования —
завода «Водтрансприбор», в настоящее время входящего в интегрированную структуру
акционерного общества «Концерн «Океанприбор». Но датой образования нашего предприятия,
ныне АО «Концерн «Океанприбор», считается 18 мая 1949 г., когда было подписано
Постановление Совета Министров СССР № 2033-770 о создании в г. Ленинграде на базе особого
конструкторского бюро (ОКБ) завода № 206 первого в стране Научно-исследовательского
института гидролокации и гидроакустики — НИИ-3 (впоследствии ЦНИИ «Морфизприбор»)
Министерства судостроительной промышленности. Не один раз менялось название нашего
предприятия и расширялась его научно-техническая и производственная деятельность, которая
всегда была насыщена напряженной работой.
Периодом становления Института стали 1950–1955 гг. В результате непрерывно
получаемой государственной поддержки, многократно увеличились лабораторнопроизводственная площадь и численность Института, была открыта собственная аспирантура, на
Ладожском озере заложена испытательная база. Возросшая научно-техническая и
производственная мощность позволила Институту успешно завершить ранее начатые
162
Гидроакустические системы
разработки. Среди них одна из самых массовых того времени — гидроакустическая станция
(ГАС) «Геркулес» для надводных кораблей. Далее приступили к разработке новых систем: ГАС
«Арктика» для подводных лодок (ПЛ), гидролокаторов нового поколения «Титан» и «Вычегда»
для надводных кораблей (НК), ГАС миноискания «Олень», «Лань-2» и «Радиан», ГАС связи
«Свияга», «Яхта» и «Хоста» и др. В конце 1950-х гг. было начато проектирование первых
гидроакустических комплексов (ГАК) «Рубин» и ГАК «Океан» с существенно повышенными
параметрами для ПЛ проектов 661 и 705. Были созданы принципиально новые направления в
отечественной гидроакустике: абсолютные доплеровские лаги типа «Земля-2» и «Самшит», ГАС
обеспечения плавания ПЛ подо льдом «Торос» и «Круг». К этому периоду относится также
разработка стационарных гидроакустических систем: береговой шумопеленгаторной ГАС
«Амур», протяженного гидроакустического рубежа «Лиман», шумопеленгаторной ГАС дальнего
обнаружения «Агам». Важнейшим технологическим достижением этих лет стало внедрение
пьезокерамики в акустические антенны, а в области обработки гидроакустической информации
— создание теории и принципов классификации морских целей по характеристикам их
шумоизлучения (аппаратура «Аякс» и «Аякс-М»). В десятилетие 1966–1975 гг. Институт
вступил как уже зрелая, сформировавшаяся организация, заслуги которой в деле создания
гидроакустических средств ВМФ были отмечены присвоением ей в 1966 г. статуса Центрального
научно-исследовательского института (ЦНИИ) и награждением орденом Трудового Красного
Знамени. В 1967 г. в Институте был создан диссертационный совет, на котором в последующие
годы защищалось ежегодно до 10 соискателей.
В 1973 г. была завершена разработка малогабаритного ГАК «Рубикон», который и сегодня
по своему энергетическому потенциалу остается «чемпионом» среди комплексов для неатомных
подводных лодок, в том числе поставляемых на экспорт. В эти же годы было начато
проектирование ГАК «Скат» с расширенными функциональными возможностями для атомных
ПЛ второго поколения, ГАК «Платина» — самого массового ГАК для современных
противолодочных НК, ГАК «Полином» для ракетных НК первого и второго ранга. Продолжали
интенсивно развиваться гидроакустические навигационные средства. Наряду с разработкой
доплеровских лагов второго поколения «Самшит» и «Кемь» были создана принципиально новые
системы типа «Шельф» с гидроакустическими маяками-ответчиками. В период 1973–1992 гг.
институт возглавлял Ленинградское научно-производственное объединение (ЛНПО)
«Океанприбор». Этапной для института стала начавшаяся в 1979 г. разработка первого
отечественного ГАК «Скат-3» с полностью цифровой обработкой информации для АПЛ третьего
поколения.
В начале 1980-х гг., в связи с перегрузкой своего плана, Институт передал ряд
тематических направлений в другие НИИ гидроакустического профиля: «Атолл» (г. Дубна),
«Штиль» (г. Волгоград), «Риф» (г. Бельцы, Молдавия), Киевский государственный НИИ
гидроприборов (г. Киев, Украина). Уже в конце 1980-х гг. ЦНИИ «Морфизприбор» представлял
собой мощную и продуктивно работающую научно-исследовательскую и проектнотехнологическую организацию в стране в области гидроакустики. Общая численность
сотрудников превысила 7 тыс. человек, среди которых было 15 докторов и 150 кандидатов наук.
Институт единственный в стране обладал всей необходимой совокупностью базовых
гидроакустических технологий: от разработки новых составов пьезокерамики для
электроакустических антенных преобразователей до создания мощных цифровых и аппаратнопрограммных гидроакустических комплексов с развитым алгоритмическим и программным
обеспечением. Трудами ученых и инженеров института сформированы научные школы по ряду
направлений прикладной гидроакустики, написано более 40 книг, освещающих различные
аспекты гидроакустики. Из принятых на вооружение ВМФ гидроакустических систем более
60 были созданы в Институте.
На современном этапе деятельности Института естественным образом отразились
процессы, произошедшие в государстве, в его экономике и обществе. В связи с распадом СССР
в Институт вернулись тематики, переданные ранее в НИИ стран ближнего зарубежья. Несмотря
на уменьшение своей численности, Институту удалось сохранить преемственность на
важнейших научных и технологических направлениях. Институт приобрел значительный
авторитет в зарубежных странах как фирма, имеющая уникальные технологии и специалистов в
области гидроакустики. В 1994 г. были завершены Госиспытания уникального ГАК «Днестр»,
163
Гидроакустические системы
удостоенного премии Правительства Российской Федерации. Накопленный в ЦНИИ
«Морфизприбор» за годы его деятельности мощный научный, технологический и проектный
потенциал, а также сохранившийся контингент ученых и инженеров обеспечивают в настоящее
время ему уже в составе АО «Концерн «Океанприбор» выполнение роли ведущего предприятия
России по созданию гидроакустической техники широкого профиля для отечественного и
экспортного кораблестроения. В 2015 г. предприятие включено в Перечень системообразующих
организаций Российской Федерации. Многолетними усилиями ученых и инженеров предприятия
созданы научные школы в таких областях прикладной гидроакустики, как:
− теория проектирования и технология создания гидроакустических систем освещения
обстановки в морях и океанах в режимах шумопеленгования и гидролокации;
− теория и технология создания гидроакустических навигационных систем;
− теория проектирования и технология создания систем гидроакустической связи;
− теория проектирования и технология создания электроакустических преобразователей
и антенной техники для мобильных и стационарных гидроакустических систем;
− теория и технология создания многопроцессорных цифровых вычислительных систем,
функционирующих в составе ГАК в режиме «реального времени»;
− гидроакустических систем классификации обнаруживаемых объектов и определения их
координат (целеуказания оружию), адаптирующихся к сложной помехо-сигнальной обстановке.
В 2019 г. решением Правительства Российской Федерации в перечень приоритетных
технологических направлений было включено новое направление — «Технологии построения
систем освещения подводной обстановки и судовой акустики».
Головным предприятием, реализующим деятельность этого приоритетного направления,
определено АО «Концерн «Океанприбор». Успехи нашего коллектива в создании современных
образцов техники неоднократно отмечались высокими государственными наградами: звание
«Героя социалистического труда» — два человека, лауреаты Ленинской и Государственной
премий — 38 человек, обладатели почетных званий — 11 человек. На предприятии в разные годы
трудились 25 докторов и около 240 кандидатов наук. Учёными и специалистами написано и
выпущено более 50 книг по гидроакустической тематике. За последние пять лет подготовлено
два доктора и три кандидата технических наук, активно велась и изобретательская работа —
ежегодно патентовались 20–30 изобретений, от 3-х до 10-ти полезных моделей, от 2-х до 7-ми
программ для электронно-вычислительных машин (ЭВМ).
164
ПРОБЛЕМЫ ПРИКЛАДНОЙ ГИДРОФИЗИКИ
ПРЯМОЕ ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ЭВОЛЮЦИИ НЕЛИНЕЙНЫХ
МОРСКИХ ВОЛН
А. В. Слюняев, д-р физ.-мат. наук
Институт прикладной физики РАН, Нижний Новгород, Россия
Национальный исследовательский университет «Высшая школа экономики», Нижний Новгород, Россия
Тихоокеанский океанологический институт им. В.И. Ильичева ДВО РАН, Владивосток, Россия
DIRECT NUMERICAL SIMULATION OF THE NONLINEAR SEA WAVES
EVOLUTION
A. V. Slunyaev, Dr.Sc.
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
HSE University, Nizhny Novgorod, Russia
V.I.Il’ichev Pacific Oceanological Institute, FEB RAS, Vladivostok, Russia
Выполнено численное моделирование эволюции ансамблей нерегулярных нелинейных волн на морской
поверхности с заданными спектральными характеристиками начальных условий. Для рассчитанных
полей смещения поверхности проанализированы спектральные и вероятностные характеристики, а
также критерии модуляционной неустойчивости и присутствия солитонных структур — в контексте
обнаружения условий возникновения «волн-убийц» и поиска возможности их прогноза.
Numerical simulation of the evolution of ensembles of irregular nonlinear waves on the sea surface with given
spectral characteristics of the initial conditions are performed. For the simulated surface displacement fields,
spectral and probabilistic characteristics are analyzed, as well as criteria of the modulational instability and the
presence of solitonic structures – in the context of identification of conditions favorable for the occurrence of
rogue waves, and searching for the possibility of their prediction.
Проблема так называемых волн-убийц (rogue waves, freak waves), заключающаяся в
неожиданно частом возникновении очень высоких волн на морской поверхности, является
предметом активных исследований последние два десятилетия, см. недавний обзор [1]. Прямое
численное моделирование больших ансамблей нерегулярных волн в полностью контролируемых
условиях в рамках по возможности полных уравнений гидродинамики, которые при этом могут
решаться быстро, рассматривается как разумная альтернатива натурным измерениям, которая
позволяет проанализировать вероятностные свойства реалистичных морских волн без
приближений, используемых при решении кинетических уравнений.
Нами проводится численное моделирование эволюции нерегулярных гравитационных
волн на двумерной поверхности воды псевдоспектральным кодом высокого порядка High Order
Spectral Method с начальными условиями, соответствующими спектру JONSWAP с заданными
характеристиками: периодом волн в пике спектра Tp = 10 с, значениями параметра пиковатости
в интервале γ =3…6, значительными высотами волн от малой до Hs = 7 м. Распределение волн по
направлениям задавалось с помощью функции cos2 с шириной Δθ от 12° до максимально
возможной 180°. Подробности вычислений можно найти в [2]. Моделирование выполнялось как
для условий очень глубокой воды, так и конечной постоянной глубины kph ≥ 0.4, где kp – пиковое
волновое число и h – глубина.
По результатам расчетов можно сделать вывод о возможности воспроизведения желаемых
спектральных условий, хотя из-за действия нелинейности происходит заметное изменение
спектра волнения. Отметим, что эти изменения имеют суб-кинетический временной масштаб.
Среди последних полученных результатов — исследование поведения индекса модуляционной
165
Проблемы прикладной гидрофизики
неустойчивости и работа по выделению солитоноподобных волновых групп в полях
нерегулярных неколлинеарных волн.
Исследовано поведение индикаторов эффекта нелинейной самомодуляции волн —
индексов BFI (Benjamin Feir Index) в различных формулировках, обсуждавшихся в литературе:
BFI1 = 2
где
σ = ∫ S (ω )dω ,
2
k pσ
δω
,
BFI 2 = 2π k pσQ p ,
(ω − ω ) S (ω )dω
δ =∫
,
2
m
2
ω
Qp =
ωm2σ 2
2
σ4 ∫
ωS 2 (ω )dω ,
BFI 2
BFI 3 =
α δ
1 + 2 θ
2 δω
δθ2 = 21 − ∫
,
(1)
cos θS (θ )dθ
,
σ2
α2 = 7,1.
Здесь σ —среднеквадратическое смещение поверхности; ω — циклическая частота и ωm — ее
первый спектральный момент; θ — угол направления распространения волн по отношению к
доминирующему; Qp — параметр Годы. Функции S(⋅) означают спектральные плотности энергии
соответствующих аргументов.
Рассчитанные индексы BFI и безразмерные характеристики, определяющие их значения,
показаны на рис. 1 для случая интенсивного волнения с относительно узким угловым спектром,
когда ожидается, что эффекты самомодуляции волн должны себя проявлять наиболее сильно.
Величины 2kpσ, δω и δθ характеризуют, соответственно, характерную крутизну волн и
относительные ширины частотного и углового спектров. Очевидна нестационарность эволюции
волн: крутизна волн немного снижается за счет уменьшения пикового волнового числа, ширина
спектра увеличивается. Это приводит к монотонному уменьшению параметра BFI со временем
для всех трех вариантов его записи, но абсолютные величины параметра и скорость его спадания
зависят от использованной формулировки.
а
б
Рис. 1. Эволюция трех вариантов определения параметра BFI — а; составляющих безразмерных
характеристик — б; для условий γ = 6, Hs = 6 м, θ = 12°.
166
Проблемы прикладной гидрофизики
Рис. 2. Поведение динамической части коэффициента эксцесса (вертикальная ось)
при изменении параметра BFI3 (горизонтальная ось) для тех же условий, что на рис. 1;
началу симуляции соответствует пустой кружок
Моментальные значения параметра BFI3, учитывающего угловое распределение волн,
сопоставлены со значениями т.н. динамического эксцесса на рис. 2. Динамический эксцесс был
рассчитан с помощью спектральной фильтрации пространственно-временных спектров Фурье
для оконных выборок, как предложено в [3]. Динамический эксцесс соответствует компоненте
свободных волн; он не связан с отличием формы волны от синусоидальной, а отражает
возникновение фазовых корреляций волн. Для случайного гауссового процесса динамический
эксцесс равен нулю; его положительные значения говорят о повышенной вероятности больших
смещений поверхности.
Для условий интенсивных волн с относительно узким угловым спектром динамический
эксцесс может принимать значительные положительные значения при сравнительно небольших
величинах индекса BFI. Интересно отметить, что случай максимального значения BFI3 ≈0,42,
зарегистрированного по результатам моделирования, соответствовал не самому узкому
угловому спектру. Максимальные значения эксцесса наблюдаются не в начале вычисления, а с
задержкой, когда значения BFI могут заметно уменьшиться. Таким образом, теоретические связи
между моментальными значениями BFI и эксцесса, полученные в литературе в предположении
квазиравновесного процесса, имеют небольшое практическое значение.
Анализ полей нерегулярных волн с различной шириной углового спектра, выполненный с
помощью процедуры поиска солитонных структур, примененной в [4] для случая планарных
волн, показал, что группы волн с характеристиками, близкими к солитонам огибающей,
обнаруживаются во всех случаях. Однако, устойчивое поведение они проявляют только при
относительно небольшом разбросе по направлениям волн Δθ ≤ 30°.
Литература
1. Слюняев А. В., Пелиновский Д. Е., Пелиновский Е. Н. Морские волны-убийцы: наблюдения,
физика и математика // УФН. 2023. Т. 193. С. 155−181.
2. Слюняев А. В., Кокорина А. В. Численное моделирование «волн-убийц» на морской поверхности
в рамках потенциальных уравнений Эйлера // Изв. РАН. ФАО. 2020. Т. 56. С. 210−223.
3. Slunyaev A. V. Effects of coherent dynamics of stochastic deep-water waves // Phys. Rev. E. 2020.
Vol. 101. P. 062214.
4. Slunyaev A.V. Persistence of hydrodynamic envelope solitons: detection and rogue wave occurrence //
Phys. Fluids. 2021. Vol. 33. P. 036606.
Исследования поддержаны грантом РНФ № 22-17-00153.
167
Проблемы прикладной гидрофизики
МОДУЛЯЦИОННАЯ НЕУСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ ВОЛНОВЫХ
ПАКЕТОВ В РАМКАХ РАСШИРЕННОГО МОДИФИЦИРОВАННОГО
УРАВНЕНИЯ КОРТЕВЕГА-ДЕ ВРИЗА
О. Е. Куркина1, канд. физ.-мат. наук, Е. Н. Пелиновский1,2, д-р физ.-мат. наук,
А. А. Куркин1, д-р физ.-мат. наук
1
Нижегородский государственный технический университет им. Р.Е. Алексеева, Россия
2
Институт прикладной физики РАН, Нижний Новгород, Россия
MODULATION INSTABILITY OF NONLINEAR WAVE PACKETS
IN THE FRAMEWORK OF THE EXTENDED MODIFIED
KORTEWEG-DE VRIES EQUATION
O. E. Kurkina1, Ph.D., E. N. Pelinovsky1,2, Dr. Sc., A. A. Kurkin1, Dr.Sc.
1
Nizhny Novgorod State Technical University n.a. R.E. Alekseev, Nizhny Novgorod, Russia
2
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Нелинейное уравнение Шредингера высшего порядка с комбинированными нелинейностями получено
асимптотически из (2+4) модели Кортевега-де Фриза для слабонелинейных волновых пакетов в
контексте внутренних волн в трехслойной симметричной среде. Обсуждаются фокусирующие свойства
и эффекты модуляционной неустойчивости для рассматриваемой физической ситуации. Получены
скорость роста неустойчивости, максимум инкремента и границы интервала неустойчивости, подробно
рассмотрена их структура на плоскостях параметров относительной глубины слоев, волнового числа
несущей и амплитуды огибающей.
The higher-order nonlinear Schrödinger equation with combined nonlinearities is derived by an asymptotic
reduction from the (2+4) Korteweg-de Vries model for weakly nonlinear wave packets for the context of interfacial
waves in a three-layer symmetric medium. Focusing properties and modulation instability effects are discussed
for the considered physical context. Instability growth rate, maximum of the increment and the boundaries of the
instability interval are derived in terms of three-layer density stratification, their structure on the parameter planes
of relative layer depth, carrier wavenumber and envelope amplitude, are considered in details.
В работе рассматривается расширенное модифицированное уравнение Кортевега-де
Вриза, или (2+4) КдВ, содержащее комбинацию нелинейных слагаемых третьей и пятой степени
в одном порядке малости
∂ζ
∂ζ
∂ 3ζ
2 ∂ζ
4 ∂ζ
+ c + α 2ζ
+ α 4ζ
+ β 3 =0 ,
∂t
∂x
∂x
∂x
∂x
(1)
где x — горизонтальная координата; t — время; оно уточняет характер волновой динамики
вблизи точки нулевой кубической нелинейности за счет нелинейности пятого порядка и является
аналогом уравнения Гарднера, которое справедливо для описания ситуаций со сменой знака
коэффициента квадратичной нелинейности [1]. Уравнение (1), называемое также (2+4) КдВ,
было, в частности, выведено для волн на границах раздела в симметричном относительно
середины по глубине в трехслойном потоке жидкости [2, 3]. Скорость линейных волн с,
коэффициенты нелинейности α2, α4 и дисперсии β определяются конкретной физической
ситуацией и зависят от того, какое физическое поле представляет собой ζ, и от параметров среды,
в которой происходит распространение волн. Мы будем полагать, что физическая величина ζ
представляет собой возмущение одной из границ раздела слоев в жидкости в контексте
внутренних волн в слоистой среде. С точки зрения волновой динамики важными также являются
знаки коэффициентов различных слагаемых в уравнении (1).
Уравнение (1) для слабонелинейных волновых пакетов может быть сведено к
эквивалентному нелинейному уравнению Шрёдингера для огибающей волнового поля. Будем
следовать классической процедуре вывода уравнения Шрёдингера, см., например [4]. Условие
168
Проблемы прикладной гидрофизики
слабой модуляции волн (узости спектра) позволяет искать решение уравнения (1) в виде
суперпозиции гармоник
+∞
ζ ( x, t ) = µ ∑ ζ m ( x, t ) exp(im(kx − ωt )) ,
(2)
m = −∞
где ζ m ( x, t ) — амплитуды гармоник, при этом основная (несущая) гармоника (m = ±1) волнового
поля обладает частотой ω и волновым числом k. В разложении (2) µ <<1 — малый параметр,
отвечающий приближению слабой нелинейности. Будем искать решение в виде разложения
амплитуды каждой гармоники ζ m ( x, t ) в (2) в ряд по малому параметру ε, характеризующему
разницу временных масштабов:
ζ m ( x, t )=
∞
∑ ε ζ ( x , x , t , t ,...) .
n
n =0
mn
0
1
0
1
(3)
Проводя последовательно асимптотическую процедуру, выполняя перемаштабирование с
учетом специфики рассматриваемой ситуации, учитывая только первые поправки к волновому
уравнению и переходя в систему отсчета, движущуюся с групповой скоростью, получаем
модифицированное уравнение:
i
2
∂η 2
3 η 4 η + β ∂ η = 0,
+ α1 η η + α
1
∂t
∂x 2
(4)
3 = −(α 2 + 48α βk 2 ) / (24βk ) , β =−3βk . Уравнение (4) является
1 = −α k , α
где ζ10 = µη , α
1
2
4
2
обобщением классического нелинейного уравнения Шрёдингера с учетом слагаемых до
четвертого порядка малости включительно и описывает слабые модуляции волн в рамках
динамики, воспроизводимой уравнением (1) — в случаях, когда в уравнениях КдВ-иерархии в
силу симметрии среды полностью вырождаются слагаемые четной нелинейности и нелинейной
дисперсии, а коэффициент кубической нелинейности в уравнении (1) близок к нулю и может
менять знак.
Далее, вводя амплитуду a(x, t) и фазу ϕ(x, t) огибающей квазигармонической волны
=
η a exp(iϕ) , и исследуя устойчивость по отношению к малым возмущениям, находим, что
частота Ω и волновое число K волны модуляции огибающей связаны дисперсионным
соотношением:
Ω1,2 =
± a0 K q +
β 12 2
K ,
a02
(5)
1 + 2α 3 a02 ) , условие модуляционной неустойчивости имеет вид q < 0, и имеется
где q =−2β 1 (α
интервал волновых чисел огибающей K < =
K*
q a02 / β 12 , на котором частота является
мнимой, монохроматическая волна неустойчива, и возмущения нарастают с инкрементом:
β
=
Im Ω a0 K q − 1 K .
a0
2
169
(6)
Проблемы прикладной гидрофизики
Зависимость (6) — немонотонная, имеет экстремум при K m = K* / 2 . Экстремум является
максимумом, максимальная величина инкремента
(Im Ω) max = a0
q
2
K* =
q 2
a0 = α 1 + 2α 3 a02 a02 .
2β
(7)
1
Можно выписать эти величины в терминах коэффициентов исходного уравнения (1).
Уравнение (1) было выведено, в частности, для длинных внутренних волн низшей моды в
трехслойной жидкости с почти симметричной конфигурацией. Простейшая симметричная
ситуация в трехслойной жидкости полной глубины H соответствует равной толщине h верхнего
и нижнего слоев и одинаковым скачкам плотности ∆ρ на границе слоев. Стратификация
становится критической при определенной относительной толщине слоев hcr / H = 9 / 26 [5],
когда коэффициент кубической нелинейности α 2 в уравнении (1) также обращается в ноль.
Коэффициенты уравнения (1) в этом контексте определяются формулами [2]:
3(26l − 9)
4l 2 − 3l
9(1324l 3 − 1508l 2 + 513l − 45)
2
4
α2 H 2 / c =
−
β
/
(
cH
)
=
−
/
α
H
c
=
−
,
,
,
4
8l 3
12
128l 7
где l = h / H (безразмерная толщина верхнего и нижнего слоев).
Поведение безразмерного параметра модуляционной
неустойчивости
qˆ (l , kˆ, aˆ0 )
проиллюстрировано (рис. 1) в зависимости от параметров l и k̂ = kH (характеризует дисперсию
в области длинных волн kˆ < 1 ), при различных безразмерных амплитудах aˆ0 = a0 / H волны:
aˆ0 = 0, 05 (рис. 1, а) и aˆ0 = 0.1 (рис. 1, б).
а
Рис. 1. Безразмерный параметр модуляционной
б
неустойчивости qˆ (l , kˆ, aˆ0 ) при aˆ0 = 0, 05 и aˆ0 = 0,1
а — при aˆ0 = 0, 05 ; б — при aˆ0 = 0,1 ; белым пунктиром показана линия смены знака qˆ = 0 ; сиреневым
пунктиром показано критическое значение относительной толщины слоев в трехслойной жидкости l = hcr/H = 9/26
170
Проблемы прикладной гидрофизики
Вблизи границы зоны неустойчивости q = 0 значения верхней границы интервала
безразмерных волновых чисел огибающей K* малы, при удалении от границы они возрастают.
При меньших значениях безразмерной амплитуды â0 значения K* H также меньше при прочих
равных условия. Инкремент (7) растет с ростом амплитуды, а также с ростом длины волны
несущей. Эти результаты могут быть полезны при планировании численных и лабораторных
экспериментов, а также при объяснении наблюдаемых натурных данных (в пределах
применимости рассматриваемых приближенных моделей).
Литература
1. Pelinovsky E., Polukhina O., Slunyaev A., Talipova T. Internal solitary waves // Solitary Waves in Fluids.
Ch. 4. WIT Press. Boston: Southampton, 2007. P. 85–110.
2. Kurkina O. E., Kurkin A. A., Soomere T., Pelinovsky E. N., Rouvinskaya E. A. Higher-order (2+4)
Korteweg-de Vries-like equation for interfacial waves in a symmetric three-layer fluid // Physics of Fluids. 2011.
Vol. 23, № 11.
3. Kurkina O. E., Kurkin A. A., Ruvinskaya E. A., Pelinovsky E. N., Soomere T. Dynamics of solitons in a
nonintegrable version of the modified Korteweg-de Vries equation // JETP letters. 2012. Vol. 95. P. 91−95.
4. Ostrovsky L. A., Potapov A. I. Modulated waves. John Hopkins University Press,1999.
5. Grimshaw R., Pelinovsky E., Talipova T. The modified Korteweg–de Vries equation in the theory of
large-amplitude internal waves // Nonlin. Process. Geophys. 1997. Vol. 4, № 4. P. 237–350.
Представленные результаты получены в рамках государственного задания в сфере научной
деятельности (тема № FSWE-2023-0004).
171
Проблемы прикладной гидрофизики
О ПАРАМЕТРИЗАЦИИ КОЭФФИЦИЕНТА СОПРОТИВЛЕНИЯ МОРСКОЙ
ПОВЕРХНОСТИ В УСЛОВИЯХ ДИНАМИЧЕСКИ ГЛАДКОЙ МОРСКОЙ
ПОВЕРХНОСТИ С ПОМОЩЬЮ ПАРАМЕТРА ШЕРОХОВАТОСТИ
К. Ю. Булгаков1, канд. физ.-мат. наук, К. Л. Егоров2, канд. физ.-мат. наук
1
Институт океанологии им. П. П. Ширшова РАН, Mocквa, Россия
2
Российский государственный гидрометеорологический университет, Санкт-Петербург, Россия
PARAMETRIZATION OF SEA SURFACE DRAG COEFFICIENT UNDER CONDITIONS
OF DYNAMICALLY SMOOTH SEA SURFACE USING ROUGHNESS PARAMETER
K. Yu. Bulgakov1, Ph.D., K. L. Yegorov2, Ph.D.
1
Shirshov Institute of Oceanology, RAS, Moscow, Russia
2
Russian State Hydrometeorology University, St. Petersburg, Russia
В настоящей работе выполнена оценка проявления волновых потоков импульса при скоростях ветра, при
которых волновая поверхность океана может считаться как динамически гладкая. Приводятся
отдельные результаты расчётов и анализ вертикальных профилей скорости ветра и зависимости
коэффициента трения от скорости ветра при различных условиях ветрового волнения.
In the paper impact of wave momentum fluxes with values of wind velocity which lead to dynamically smooth
ocean surface is estimated. Results of calculations and analysis of vertical profiles of wind speed and the
dependence of the drag coefficient on wind velocity under various wave conditions are given.
Частью комплексной задачи взаимодействия прилегающих к поверхности вода-воздух
пограничных слоев атмосферы и океана является задача определения вертикального профиля
скорости ветра в пограничном слое атмосферы над океаном. В формировании профиля ветра и,
как следствие, в его динамическом воздействии на поверхность океана, заметную роль могут
играть гравитационные поверхностные волны. Возможными элементами участия волнения в
общем процессе взаимодействия являются два фактора. Одним из них является, отмеченный ещё
в работах [1−3], формирующийся в приповерхностном слое и направленный к поверхности
волновой поток импульса проявлением которого является вклад энергии вертикальных
колебаний частиц поверхности в формирование кинетической энергии турбулентности, её
потоков в приводный слой атмосферы и прямое воздействие на коэффициент турбулентности.
Целью данной работы является анализ влияния потоков волнового импульса на
вертикальный профиль ветра и коэффициент сопротивления над динамически гладкой
поверхностью. Их формирование в этом случае существенно зависит от молекулярной вязкости
среды. Для этого использовались две модели описанные в [4]: 1) с введением непосредственного
участия молекулярной вязкости в динамике формирования профиля скорости ветра в приводном
слое атмосферы при наличии волнения, в область интегрирования соответствующих уравнений
кроме турбулентной области включен чисто вязкий слой; 2) с параметризацией вязкого подслоя
с помощью параметра шероховатости.
С моделями были проведены эксперименты при различных скоростях ветра на верхней
границе области интегрирования (10 метров) при разных степенях развития волн. Отдельные
результаты представлены на рис. 1.
На рис. 1: 1 — модель с вязким подслоем без волн;
2 — модель с шероховатостью без волн (выбранная константа);
3 — модель с вязким подслоем и развитыми волнами;
4 — модель с вязким подслоем и молодыми волнами;
5 — модель с шероховатостью (выбранная константа) и развитыми волнами;
6 — модель с шероховатостью (выбранная константа) и молодыми волнами;
7 — модель с шероховатостью («классическое» значение константы) и развитыми
волнами;
8 — модель с шероховатостью («классическое» значение константы) и молодыми волнами;
9 — модель с шероховатостью («классическое» значение константы) без волн.
172
Проблемы прикладной гидрофизики
Рис. 1. Примеры зависимости коэффициента сопротивления от скорости ветра
Было выявлено, что использование в модели 2 «классическое» значение постоянной при
известной формуле шероховатости динамически гладкой поверхности приводит к различиям в
результатах, полученных с моделью 1 (см кривые 1 и 9 на рис. 1). Поэтому в дальнейшем
использовалось значение постоянной, при котором результаты экспериментов в условиях
отсутствия волн совпадают друг с другом (кривые 1 и 2 на рис. 1 полностью совпадают).
Вышеуказанные кривые соответствуют нормальному, подтверждаемому различными
данными наблюдений, уменьшению коэффициента сопротивления динамически гладкой
поверхности с увеличением скорости ветра при отсутствии волнения. Влияние волновых потоков
импульса для принятой в расчётах комбинации отражено на кривых 4 и 6 (3 и 5). Как видно,
характер зависимости коэффициента сопротивления изменяется с переходом от стадии
уменьшения при малых значениях скорости ветра (2−3 м/с) к последующему росту с наибольшей
скоростью роста в условиях ранней стадии развития волн. Этот участок кривой с возрастанием
коэффициента сопротивления характерен для полностью динамически шероховатых
поверхностей, параметр шероховатости которых в условиях волнения моделируется формулой
Чарнока (смотри, например, рис. 4.18 в работе [1]).
В представленной работе подстилающая поверхность априори принимается динамически
гладкой. Кривая 6 построена по модели, в которой параметр шероховатости обратно
пропорционален динамической скорости, и при отсутствии волнения сопротивление
поверхности при условии постоянства величины mv может только уменьшаться с увеличением
скорости ветра. Кривая 4 соответствует модели с вязким и буферным слоями, и в ней вообще не
используется величина, характеризуемая как «параметр шероховатости». Наблюдаемый на этих
кривых участок роста в зависимости коэффициента сопротивления обусловлен направленными
к поверхности волновыми потоками импульса, постепенно усиливающимися с увеличением
173
Проблемы прикладной гидрофизики
скорости ветра. Роль этого фактора возрастает с увеличением скорости ветра и, наконец,
становится преобладающим.
Следует отметить также и расхождение между собой кривых 4 и 6 (а также 3 и 5) по мере
увеличения скорости ветра. Этот факт даёт основание предположить существование зависимости
коэффициента от скорости ветра. Сравнение кривых 4 и 3 свидетельствует о зависимости
коэффициента от стадии развития волнения.
Литература
1. Филлипс О. М. Динамика верхнего слоя океана / Пер. с англ. М.: МИР, 1969. 267 с.
2. Miles J. W. A note on the interaction between surface waves and wind profiles // Journal of Fluid
Mechanics. 1965. Vol. 22, № 4. P. 823–827.
3. Китайгородский С. А. Физика взаимодействия атмосферы и океана. Л.: Гидрометеоиздат, 1970.
280 с.
4. Егоров К. Л., Булгаков К. Ю. Влияние ветровых волн на формирование скорости ветра в
приводном слое атмосферы в условиях динамически гладкой поверхности // Фундаментальная и
прикладная гидрофизика. 2023. T. 16, № 4. С. 18−31.
Результаты исследований выполнены в рамках гос. задания (№ FMWE-2024-0028).
174
Проблемы прикладной гидрофизики
РАЗВИТИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ПРИБРЕЖНОЙ МОРСКОЙ
АКВАТОРИИ ПРИ ШТОРМОВЫХ УСЛОВИЯХ ПО ДАННЫМ СИНХРОННОГО
РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ, СПУТНИКОВОГО НАБЛЮДЕНИЯ
И ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
В. В. Горбацкий1, канд. техн. наук, Е. С. Лебедева1, Н. Н. Шпилев2
1
ФГУП «Крыловский государственный научный центр», Санкт-Петербург, Россия
2
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
DINAMICS OF THE SEA COASTS AREA DUE TO THE SIMULTANIONS RADAR
MEASHUREMENTS, SATELLITE OBSERVARTIONS AND NUMERICLE
MODELLING
V. V.Gorbatskiy1, Ph.D., E. S.Lebedeva1, N. N.Shpilev2
Krylov State Research Centre, St. Petersburg, Russia
2
Shirshov Institute of Oceanology, RAS, Moscow, Russia
1
Рассматриваются особенности формирования поля течений в прибрежной морской акватории под
действием интенсивного атмосферного вихря, на основе данных спутниковых измерений,
радиолокационного зондирования, численного моделирования течений.
The special condition of sea coast currents formations due strong cyclone impact is discussed. The satellite
measurements data, Doppler radar data and numeric simulation is presented.
Течения в прибрежной морской акватории в значительной степени определяются ее
морфологией: пространственной изменчивостью рельефа дна и конфигурацией береговой линии.
Оперативная достоверная оценка пространственной структуры и интенсивности поля
скоростей ветровых течений по площади контролируемой акватории имеет практическое
значение для краткосрочного прогнозирования возникновения высокодинамичных областей
водных масс, представляющих опасность для судоходства и проведения мероприятий по
безопасному функционированию морских сооружений на шельфе.
В работе [1] описан метод проведения указанных оценок с использованием комплекса
данных, включающих радиолокационное зондирование течений на морской поверхности,
использование синхронных данных о ветровых условиях, численное моделирование течений и
данные спутниковых наблюдений. В настоящей работе указанный метод применен для анализа
экстремального явления воздействия сильного атмосферного циклона на формирование течений
в прибрежной акватории юго-восточной части Черного моря.
На рис. 1 показана картина ветрового циклона, формирующего холодное пятно на морской
поверхности по спутниковым данным измерений температуры (рис. 2). Описываемое явление
наблюдалось в весенний период (май 2017 г.), когда толщина верхнего теплого слоя
сравнительно мала (около 10 м). Возможный механизм такого явления описан, в частности, в
работе [2].
Пятно существовало около 3 дней и завершилось коллапсированием холодного водного
слоя. Это, в свою очередь, привело к возникновению интенсивных струйных и вихревых
течений, показанных по данным измерений течений доплеровским радиолокатором на рис. 3 в
виде вихревых структур на морской поверхности.
Численное моделирование течений в прибрежной области с использованием модели
COHERENS показало, что после завершения сильного ветрового воздействия (рис. 4) возникают
инерционные колебания водных масс (рис. 5) и локальные вихревые образования в окрестности
поднятия дна (рис. 5). Цветовая шкала скоростей течений на рис. 4 и 5 указана в м/с.
175
Проблемы прикладной гидрофизики
Рис. 1. Картина формирования ветрового циклона
Рис. 2. Формирование холодного пятна на морской поверхности
по данным измерений температуры поверхности моря
Рис. 3. Формирование вихревых структур на морской поверхности
по данным измерений течений доплеровским радиолокатором
176
Проблемы прикладной гидрофизики
Рис. 4. Расчетная картина поля течений до завершения ветрового воздействия
Рис. 5. Расчетная картина поля течений через 6 часов после ветрового воздействия
Представленная в докладе методика оценки поля изменчивости течений прибрежных
морских акваторий со сложной береговой линией и рельефом дна, показывает возможность
оперативного определения гидрологических условий с использованием доступных
метеорологических данных и измерений радиолокационными средствами.
Литература
1. Горбацкий В. В, Шпилев Н. Н., Лебедева Е. С. Контроль течений на поверхности прибрежных
морских акваторий дистанционными методами // Тр. Крыловского государственного научного центра.
2022. Т. 1. С. 160−167.
2. O΄Brien J. J., Reid R. O. The non-linear response of a two-layer, baroclinic ocean to a stationary, axiallysymmetric hurricane: part I. Upwelling induced by momentum transfer // Journal of atmospheric sciences. 1967.
P. 197−207.
177
Проблемы прикладной гидрофизики
ЛАБОРАТОРНЫЕ ИССЛЕДОВАНИЯ ВЛИЯНИЯ БИТОГО ЛЬДА
НА РАСПРОСТРАНЕНИЕ КОРАБЕЛЬНЫХ ВОЛН
Н. В. Калинина, канд. техн. наук, Ю. А. Двойченко, канд. техн. наук, А. А. Куркин, д-р физ.-мат. наук
Нижегородский государственный технический университет им. Р. Е. Алексеева, Россия
LABORATORY STUDIES OF THE INFLUENCE OF BROKEN ICE
ON THE PROPAGATION OF SHIP WAVES
N. V. Kalinina, Ph.D., Y. А. Dvoichenko, Ph.D., A. A. Kurkin, Dr.Sc.
Nizhny Novgorod State Technical University n.a. R. E. Alekseev, Nizhny Novgorod, Russia
В связи с активным освоением Мирового океана и продлением навигации актуальными являются задачи
по прогнозированию ледовой ходкости на стадии проектирования судов. Особую значимость
приобретают вопросы изучения волновых процессов, обусловленных наличием льда на поверхности моря.
Рассмотрены вопросы влияния битого льда на волновую составляющую сопротивления. Приведены
результаты экспериментальных исследований в опытовых бассейнах. Показано существование
экранирующего эффекта битого льда при движении судов.
The tasks of predicting of ice propulsion at the design stage of ships are relevant in connection with the active
development of the World Ocean and the extension of navigation. The issues of studying wave processes caused
by the presence of ice on the sea surface are of particular importance. The issues of the influence of broken ice on
the wave component of resistance are considered. The results of studies in experimental basin are presented. The
existence of a screening effect of broken ice during the movement of ships is shown.
Введение. Волновые процессы в море со свободной поверхностью представляют собой
крупную проблему современной физики океана, о чем свидетельствуют публикации большого
числа монографий и обзоров. А в связи с активным освоением Полярных районов Мирового
океана, а также с решением задач ледовой ходкости судов в условиях продленной навигации,
особую значимость приобретает изучение волновых процессов, обусловленных наличием
ледяного покрова на поверхности моря. Вопросами о распространении волн в водоеме,
полностью покрытом льдом однородной сплоченности, занимались многие ученые [1−4]. Эти
задачи представляют научный и практический интерес.
Сопротивление движению судов во льдах. При проектировании ледоколов и судов
ледового плавания одним из важнейших моментов является определение ледового
сопротивления Rл, испытываемого судном при движении в сплошных или битых льдах. Оно
складывается из чистого ледового сопротивления Rчл и сопротивления воды Rв:
Rл = Rчл + Rв.
(1)
Сопротивление воды Rв рассматривается как сумма отдельных составляющих:
Rв = Rтр + Rф + Rволн,
(2)
где Rтр — сопротивление трения, вызываемого трением обтекающей корпус воды; Rф —
сопротивление формы, вызываемое обтеканием корпуса судна вязкой жидкостью и
образованием в носовой части зоны повышенного давления, а в кормовой части — зоны
пониженного давления и завихрений, тормозящих движение судна вперед; Rволн —волновое
сопротивление, вызываемое волнообразованием от движения судна, требующим
соответствующей затраты энергии.
Для определения чистого ледового сопротивления судна Rчл в настоящее время
разработано много различных расчетных методов [5]. Сопротивление воды Rв при этом
определяется обычными методами (2), как и при движении судна в свободной ото льда воде
[3, 5] или не учитывается в виду малых значений, по сравнению с Rчл при движении в сплошном
льду. Такой подход вносит в результаты расчета полного ледового сопротивления погрешность,
так как сопротивление воды при движении судна в ледовых условиях отличается от
сопротивления судна при движении в свободной воде. Это связано не только с изменением
178
Проблемы прикладной гидрофизики
условий обтекания корпуса судна при частичном облегании его льдом, но и с влиянием битого и
сплошного льда на процесс волнообразования. При низких скоростях движения судна это
влияние не велико. Но при увеличении скоростей хода лед оказывает экранирующее влияние на
распространение корабельных волн, что отмечалось рядом судоводителей [3]. Отмеченное
обстоятельство относится ко всем судам при эксплуатации в ледовых условиях.
Многочисленные наблюдения за движением судов показали, что амплитуда волн,
генерируемых судном в ледовых условиях заметно меньше, чем при той же скорости в чистой
воде. Скорость распространения волн во льду меньше, чем в воде, а сами волны становятся
короче. Аналогичные явления наблюдались при входе гравитационных волн из части акватории
с чистой водой в зону битого льда [1]. Очевидно, что в битом льду играет роль диссипация
энергии, обусловленная вынужденными колебаниями обломков льда, которые происходят за
счет колебаний волны. Таким образом, возникает экранирующий эффект слоя, находящегося на
поверхности чистой воды. Такие задачи рассмотрены в работе [1].
Очевидно, что с увеличением скорости и чисел Фруда значительно увеличивается
волновая составляющая сопротивления, которая при экранирующем действии битого льда
уменьшается. Это подтверждается экспериментальными исследованиями сопротивления
движению модели ледокола проекта 21900 (масштаб 1:100) на чистой воде и в битом льду
толщиной 10 мм и 20 мм сплоченностью 9 баллов (рис. 1). В качестве модели битого льда
использованы плитки полиэтилена высокого давления размером 10×60×60 мм и 20×100×100 мм.
Чем выше скорость движения, тем разница между сопротивлением на чистой воде и
сопротивлением в тонком битом льду становится меньше, а при определенной скорости
движения эти значения сравниваются. Также заметен переход от закона сопротивления в виде
квадратичной параболы на чистой воде к практически прямолинейной зависимости в битом льду
большой толщины и сплоченности.
Примером тому могут служить и некоторые экспериментальные данные испытаний
моделей судов за рубежом [5].
Рис. 1. Сопротивление модели ледокола проекта 21900 при движении
на чистой воде и в битом льду сплоченностью 9 баллов
1 — чистая вода; 2 — битый лед толщиной 10 мм; 3 — битый лед толщиной 20 мм
179
Проблемы прикладной гидрофизики
Лабораторные исследования влияния битого льда на распространение волн.
Описанный эффект экранирующего влияния битого льда на распространения волн подтвержден
экспериментальными исследованиями в гидролотке НГТУ, оборудованном волнопродуктором
пластинчатого типа. Гидролоток имеет размеры: длина 6,61 м; ширина 0,5 м; высота 1 м.
В качестве модели битого льда использовались плитки полиэтилена высокого давления
плотностью 0,91 т/м3 с размерами в плане 100×100 мм, толщиной 20 мм. Глубина воды
составляла 0,4 м, частота колебаний волнопродуктора 1 Гц. Амплитуда колебаний пластины
волнопродуктора задавалась от 5° до 24°.
Проведены две серии экспериментов. Первая серия — это испытания на чистой воды,
вторая — с моделью битого льда на поверхности воды.
Во всех опытах велась регистрация волновой картины посредством видеосъемки и
определялись: скорость движения волн; момент начала установившегося движения; момент
начала возникновения волн; процесс распространения волн. Амплитуда и длина волны в момент
установившегося движения определялись по выделенным стоп- кадрам видеозаписи.
Эксперименты на чистой воде. Опыт начинался на спокойной поверхности воды. После
начала работы волнопродуктора установившаяся максимальная амплитуда волнового профиля в
средней части лотка наблюдалась, когда фронт начальной волны достигал задней стенки.
Отражаясь от нее, волна начинала формировать стоячие волны, постепенно занимающие
¾ длины лотка.
Параметры волны (длина λв, скорость движения vв и амплитуда ав) определялись в момент
установившегося движения волны. Были использованы видеозаписи при амплитуде
волнопродуктора 20°. Характерный вид волнового профиля на чистой воде показан на рис. 2.
Рис. 2. Характерный профиль поверхностной волны при амплитуде волнопродуктора 20°
а
б
Рис. 3. Движение прогрессивной волны с моделью битого льда
а — вид на переднюю часть фронта волны; б — вид на фронт волны за гребнем
180
Проблемы прикладной гидрофизики
Эксперименты с битым льдом на поверхности воды. Параметры волны с плитками на
поверхности воды определялись при той же амплитуде. Характерный вид волны при этом
показан на рис. 3. Интересно отметить, что перед фронтом плитки сплачивались (рис. 3, а), а за
фронтом происходило разряжение (рис. 3, б), между плитками расстояние достигало 50 мм. Это
явление, наряду с наличием дополнительного слоя плиток (битого льда) на поверхности воды,
также может влиять на усиление экранирующего эффекта битого льда.
Скорость распространения волн определялась частотой возмущающего воздействия со
стороны волнопродуктора. Средние результаты измерений параметров волн, проведенные путем
анализа стоп-кадров видеозаписи, сведены в табл. 1.
Таблица 1
Параметры волн на чистой воде и в битом льду
Условие
волнового
движения
Чистая вода
Битый лед
Амплитуда
качания
волнопродуктора,
град
20°
20°
Частота
волнопродуктора,
Гц
Длина
волны, м
Амплитуда
волны, м
Скорость
волны, м/с
1
1
1,75±0,05
1,65±0,05
0,18±0,02
0,14±0,02
1,75±0,05
1,65±0,05
Из данных табл. 1 следует, что наличие битого льда приводит к уменьшению амплитуды и
длины волны, а также к уменьшению скорости распространения волны по сравнению со
скоростью на чистой воде.
Заключение. Исследования показали, что с увеличением толщины битого льда на
поверхности воды в акватории снижается скорость распространения волн. Наибольшее
снижение скорости происходит при увеличении толщины битого льда и увеличивается с
возрастанием скорости распространения волн.
При прогнозировании ледовой ходкости судов аналитическими методами необходимо
учитывать влияние экранирующего эффекта при расчете волновой составляющей
сопротивления. Поэтому наиболее достоверным методом прогнозирования ледовой ходкости на
ранних стадиях проектирования судов являются модельный эксперимент.
Литература
1. Букатов А. Е., Букатов А. А., Жарков В. В., Завьялов Д. Д. Распространение поверхностных волн
в ледовых условиях. Севастополь: Морской гидрофизический институт РАН, 2019. 204 с.
2. Доронин Ю. П., Хейсин Д. Е. Морской лед. Л.: Гидрометеоиздат, 1975. 318 с.
3. Рывлин А. Я., Хейсин Д. Е. Испытания судов во льдах. Л.: Судостроение, 1980. 207 с.
4. Milano V. R. Resistance of ship to clew continuous motion in when assisted by an Air Cushion vehicle
// Proceedings of the 12-th Canadian Symposium Air Cushion Technology. 1978. Р 247−265.
5. Ионов Б. П., Грамузов Е. М. Ледовая ходкость судов. СПб.: Судостроение, 2013. 504 с.
Представленные результаты получены по проекту РНФ № 22-19-00376 «Экспериментальнотеоретическое исследование полуэмпирических моделей взаимодействия судов со льдом».
181
Проблемы прикладной гидрофизики
ПОЗИЦИОННЫЙ МЕТОД ТЕПЛОВИЗИОННЫХ ИССЛЕДОВАНИЙ
ГИДРОФИЗИЧЕСКИХ ПРОЦЕССОВ НА МОРСКОЙ ПОВЕРХНОСТИ
С. С. Зенченко, канд. техн. наук, М. А. Полетаева
ФГУП «Крыловский государственный научный центр», Санкт-Петербург, Россия
POSITIONAL METHOD FOR THERMAL IMAGING RESEARCH
OF HYDROPHYSICAL PROCESSES ON THE SEA SURFACE
S. S. Zenchenko, Ph.D., M. A. Poletaeva
Krylov State Research Centre, St. Petersburg, Russia
Рассмотрены результаты разработки позиционного метода тепловизионных исследований, основанного
на использовании в условиях открытого опытового бассейна искусственного источника интенсивного
светового наклонного облучения водной поверхности и регистрации параметров принудительных
нарушений инфракрасного излучения от световой дорожки этого облучения.
The results of the positional method of thermal imaging studies are considered in the article. In an open
experimental pool, an artificial source of intense light irradiation is used at an angle to the water surface and the
parameters of effects in infrared radiation from the light path are recorded.
Привлекательность дистанционных тепловизионных методов контроля гидрофизических
процессов (ГФ) на морской поверхности (МП) обусловлена, не только удобством бесконтактных
измерений, но и получением информации о дополнительных параметрах ГФ процессов за счет
модуляции ими теплового поля морской поверхности.
Так, многочисленные исследования изменчивости радиационной температуры морской
поверхности при вариациях углового режима измерений [1] установили возможные области
контроля изменений термодинамической температуры МП и теплового излучения с участием
отраженной составляющей поля радиационной температуры небосвода. Эта методика
наклонного зондирования в диапазоне углов Брюстера открыла возможность фиксации
волновых возмущений МП, а при фильтрации входного излучения даже их структуру [2−3].
Ещё одно обстоятельство, связанное с солнечной подсветкой МП и определившей её в
большинстве случаев в качестве серьезной помехи, особенно в видимом диапазоне спектра,
определило более лояльное к ней отношение из-за применения соответствующих фильтров в
инфракрасной (ИК) области измерений (рис. 1). Стабильные проявления зеркальных точек
солнечной дорожки в ИК диапазоне и их девиация под действием течений, ветровых проявлений
служат информативным полем для изучения ГФ процессов. Только географическая
нестабильность солнечной дорожки из-за вращения Земли не дает использовать это
преимущество в полной форме [4].
а
б
Рис. 1. Изображение солнечной дорожки в различных спектральных диапазонах
а — ИК-диапазон; б — видимый диапазон
182
Проблемы прикладной гидрофизики
Позиционный метод с применением тепловизионных средств измерения. Для создания
подобного солнечному облучению эффектов, предложен способ наклонного облучения водной
поверхности с использованием мощного поискового прожектора, обеспечивающего по его
техническим параметрам предельную дальность освещения до 2000 м. Прожектор
устанавливался на берегу открытого опытового бассейна. Световое поле на водной поверхности
занимало площадь для исследования в размерах углового разрешения прожектора. За счет
наклонного облучения длина световой дорожки, в видимом спектре, достигала от 35 до 50 м. На
противоположном берегу бассейна, на удалении 70 м, располагался измерительный комплекс,
включающий ИК-тепловизоры с чувствительностью в диапазоне от 8 до 14 мкм и от 1,5 до
5,7 мкм. Для наблюдения вариаций теплового поля световой дорожки производились
поперечные пересечки световой дорожки посредине бассейна, на удалении 35 м от берега. Для
этого применялся носитель, автономно передвигающийся в надводном положении и полностью
скрытый и омываемый водой. На его поверхности устанавливались 3 конструктивных элемента
разной площади, выступающие на различной высоте над водной поверхностью и играющие роль
источников для реперного контроля ИК-излучения от них.
Результаты исследований. В предполагаемом рассмотрении позиционный метод можно
трактовать, как определение различных параметров теплового поля световой дорожки
относительно известных постоянных мест расположения источника светового облучения водной
поверхности и регистрирующей тепловизионной аппаратуры. На рис. 2 представлены в 3-х
мерном виде картина теплового поля поверхности бассейна и особенности проявлений
прожектора (1) в прямой видимости, световой дорожки от его облучения (2) для спектрального
диапазона от 1,5 до 5,7 мкм.
Сравнение аналогичной картины теплового поля в диапазоне от 8 до 14 мкм с картиной
поля спектра от 1,5 до 5,7 мкм показало существенное их различие. И это различие было
предсказуемо, если учитывать спектральное распределение яркости излучения прожектора. Оно
находится в диапазоне спектра от 1 до 720 нм и, очевидно, может захватывать часть ИКдиапазона от 1,5 до 5,7 мкм. В диапазоне от 8 до 14 мкм такого рода проявления существенно
ниже. На рис. 2 показаны теплограммы элементов конструкций для реперных отсчетов (№ 1,
№ 2, № 3) в позиции вне световой дорожки. На рис. 3 показан профиль температуры по сечению
теплового поля элементов реперного контроля, расположенных вне поля световой дорожки, в
координатах радиационной температуры и линейных размеров, переведенных на параметры
матрицы приемника излучения.
Рис. 2. Картина теплового поля поверхности в 3-х мерном представлении
183
Проблемы прикладной гидрофизики
Рис. 3. Профили температуры
сечений линий контроля по расположению
элементов реперного отсчета и световой
дорожки
Рис. 4. Картина 3-хмерного поля температуры
поверхности бассейна при волновых возмущениях в
области световой дорожки
В табл. 1 представлены обобщенные значения для центрального реперного элемента (№ 2)
для обоих спектральных диапазонов до и после нахождения в световой дорожке, поскольку изза размеров светового пятна не все реперные элементы полностью вписывались в эти масштабы.
Кроме того, приведены значения температуры в области световой дорожки (Трад., св. дор.) и
максимальная температура прожектора при прямой видимости (Трад. прож.) для указанных
спектральных диапазонов.
Относительные отклонения показателей температуры в поле световой дорожки
∆λ,мкм
7−14
1,5−5,7
Трад., № 2,°С.
до свет. дор.
3,2
4,79
Трад., № 2,°С,
свет.дор.
4,0
6,18
Трад.,
свет.дор.,°С
4,27
6,66
Трад.прож.,°С
29,13
46
Таблица1
Увеличение
Трад.св.дор
20,1 %
20,8 %
Расчетные значения относительных отклонений температуры с учетом значений
температуры Трад.св.дор., показанное в Таблице1, свидетельствует о приближенном увеличении
температуры реперных элементов из-за облучения не менее, чем на 20%.
Еще одним интересным обстоятельством применения позиционного метода может
служить наблюдение отклика световой дорожки на волновые проявления, иллюстрируемые на
рис.4 в 3-х мерном представлении. В этом случае вполне очевидно изменение не только размеров
световой дорожки, но и её структуры в целом. Эти эффекты требуют своего особого изучения и
анализа и являются предметом дальнейших исследований.
Литература
1. Зенченко С. С., Поварков В. И., Самков В. М. Угловой и многоспектральный метод измерения
характеристик морской поверхности в оптическом диапазоне спектра // Тез. докл. X Пленума Рабочей
группы по Оптике океана Оптика моря и атмосферы. Л.: 1988. С. 414–415.
2. Зенченко С. С., Самков В. М. Особенности использования дистанционной аппаратуры при
измерении температуры поверхности океана // Тез. докл. Всесоюз. конф. «Проблемы метрологии
гидрофизических измерений» М.: ВНИИФТРИ, 1990.
3. Гаврилов Д. С., Зенченко С. С., Самков В. М. Результаты угловых и многоспектральных измерений
радиационной температуры взволнованной морской поверхности // Тр. Всерос. конф. «Прикладные
технологии гидроакустикии гидрофизики». 2016. С. 151–153.
4. Зенченко С. С. Методы и результаты эффективного применения современных тепловизионных
средств измерения гидрофизических процессов // Тр. Крыловского гос. науч. центра. 2021. Вып. 2(396).
С. 134–138. DOI: 10.24937/2542-2324-2021-2-396-134-138.
184
Проблемы прикладной гидрофизики
ЕСТЕСТВЕННЫЕ НИЗКОЧАСТОТНЫЕ ЭЛЕКТРИЧЕСКИЕ ПОЛЯ В МОРСКИХ
ПРИБРЕЖНЫХ ЗОНАХ
В. С. Исмагилов, канд. физ.-мат. наук, Ю. А. Копытенко, д-р физ.-мат. наук
СПбФ ИЗМИРАН, Санкт-Петербург, Россия
NATURAL LOW-FREQUENCY ELECTRIC FIELDS IN MARINE COASTAL ZONES
V. S. Ismagilov, Ph.D., Yu. A. Kopytenko, Dr.Sc.
SPbF IZMIRAN, St. Petersburg, Russia
Представлены результаты экспериментальных исследований естественных возмущений (F <1 Гц)
электрического поля в морских прибрежных зонах. В диапазоне частот F = 0,002–0,1 Гц выявлена зона
аномального увеличения амплитуды вариаций электрического поля (береговой эффект), созданного
ионосферными источниками. Показано, что кроме естественных вариаций электрического поля
ионосферно-магнитосферного происхождения наблюдаются возмущения, связанные с морской средой.
Определена величина вариаций электрического поля, созданных морскими волнами. Амплитуда вариаций
максимальна возле кромки воды.
The results of experimental studies of natural disturbances (F <1 Hz) of the electric field in marine coastal zones
are presented. In the frequency range F = 0,002–0,1 Hz, a zone of anomalous increase in the amplitude of electric
field variations (shore effect) created by ionospheric sources was identified. It is shown that in addition to natural
variations in the electric field of ionospheric-magnetospheric origin, disturbances associated with the marine
environment are observed. The magnitude of variations in the electric field created by sea waves has been
determined. The amplitude of variations is maximum near the water's edge.
Введение. Исследованиям электромагнитных полей на поверхности морской среды
посвящено большое количество работ, в которых исследуется электромагнитное поле,
образующееся при морском волнении в приводном слое атмосферы и рассматриваются
возмущения сверхнизкочастотных (СНЧ) естественных электрических полей ионосферномагнитосферного происхождения. Горизонтальная компонента электрического поля на
поверхности Земли много меньше вертикальной (~130 В/м) и зависит как геоэлектрическими
особенностями земной коры, так и электрическим полем атмосферы, зависящим от
метеорологических факторов. В морских прибрежных зонах измерения вариаций
горизонтальных компонент электрических полей практически не проводились. Цель данной
работы — исследование естественных электрических полей в морских прибрежных зонах.
Обсуждение результатов экспериментов. В проведенных экспериментах регистрация
данных выполнялась геофизическими станциями GI-MTS-1. В состав станции входят
3 трехкомпонентных магнитных датчика торсионного типа и две горизонтальные теллурические
линии (датчики электрического поля) длиной ~50 м (Ex — ортогонально берегу, Ey — вдоль
берега).
В 2019 г. на северном берегу Белого моря (м. Турий) проведен эксперимент, в котором
6 измерительных электродов устанавливались от кромки воды ортогонально берегу с шагом 5 м.
Седьмой измерительный электрод располагался на расстоянии ~100 м. Заземляющий электрод,
относительно которого измерялась разность потенциалов, располагался на расстоянии ~150 м от
береговой линии. Среднеквадратическая погрешность регистрируемой индукции магнитного
поля составляет <20 пТл на частоте 1 Гц, разности потенциалов электрического поля – <0,02 мкВ.
На рис. 1 представлены изменения параметров естественного электрического поля в
зависимости от расстояния до кромки воды за период 16‒22.07.2019 г. На рис. 1 сверху вниз в
зависимости от расстояния от береговой линии показаны изменения Ех — среднее значение
компоненты постоянного электрического поля, определенное в точках расположения
измерительных электродов и |Ех| — среднеквадратичная амплитуда вариаций электрического
поля для диапазона частот F = 0,002 – 0,1 Гц.
Из рис. 1 видно, что величина Ex растет с увеличением расстояния от берега. Однако на
расстоянии ~30 м от кромки воды наблюдается уменьшение величины поля, вероятно, это
связано с небольшим понижением рельефа берега и уменьшением толщины слоя песка
(локальная геоэлектрическая неоднородность), что отражается и на кривых на нижней панели.
Амплитуды вариаций с различными частотами максимальны на ближайшей к кромке воды точке.
185
Проблемы прикладной гидрофизики
Рис. 1. Величина Ех — компонента электрического поля и среднеквадратичная амплитуда
вариаций |Ех| в диапазоне частот F = 0,002 – 0,1 Гц в зависимости от расстояния до кромки воды
Мыс Турий, 16-22.07.2019 г.
При падении переменной электромагнитной волны на земную поверхность в области
контакта двух сред с различными геоэлектрическими свойствами (море‒суша) индуцируются
электрические заряды [1]. Плотность избыточных зарядов в зоне скачка электропроводимости
синхронно изменяется с фазой переменного возмущения и в области контакта суша−море
возникает усиление амплитуды Ех-компоненты естественного переменного электрического поля
(«береговой эффект»).
На рис. 2 в диапазоне частот F = 0,05–0,5 Гц за двухсуточный период представлены
разности вариаций электрических полей 5 электрических датчиков (5 нижних кривых)
расположенных на берегу с шагом 5 м (dEx) и удаленного от берега на 35 м датчика. Верхняя
кривая на рис. 2 представляет вариации естественного электрического поля ионосферного
происхождения на удаленном на 35 м от берега датчике (Ex). Процедура получения разности
полей, измеренных пятью ближними к кромке воды датчиками и полем датчика, расположенного
на расстоянии 35 м от кромки воды, позволяет удалить естественные вариации электрического
поля, созданные источниками ионосферного происхождения и выделить вариации
электрического поля, созданные морскими волнами.
а
б
Рис. 2. Вариации электрического поля Ех (F=0,05–0,5 Гц) измеренные на расстоянии ~35 м от берега
(верхняя кривая) и разности dEx вариаций электрических полей (а); среднеквадратические амплитуды
электрического поля морских волн в зависимости от расстояния от берега (б)
Мыс Турий, 20.08.2020 г.
186
Проблемы прикладной гидрофизики
Рис. 3. Динамические спектры (F = 0,02–0,2 Гц) Ех горизонтальной компоненты вариаций
электрического поля на берегу (нижняя панель) и в точке, удаленной на 200 м от берега (верхняя панель)
Камчатка, мыс Скалистый, 21.08.2018 г.
На рис 2 видно, что амплитуды вариаций поля морских волн сильно ослабевают при
удалении от берега и имеют совсем другой характер, чем вариации, созданные ионосферными
источниками — верхняя кривая на рис. 2, а.
На рис. 3 представлены динамические спектры Ех горизонтальной компоненты вариаций
электрического поля на берегу Охотского моря (нижняя панель) и в точке, удаленной на 200 м
от берега (верхняя панель). Как видно из рисунка, только вблизи береговой кромки в диапазоне
частот F = 0,03–0,15 Гц наблюдаются гармоники возмущений электрического поля, создаваемые
морскими волнами.
Заключение. В диапазоне СНЧ частот F = 0,05–0,5 Гц выявлена зона аномального
увеличения амплитуды вариаций электрического поля (береговой эффект), созданного
ионосферными источниками. Амплитуда этих вариаций максимальна возле кромки воды
(береговой эффект), уменьшается с удалением от берега и реагирует на локальную
геоэлектрическую аномалию, расположенную в прибрежной зоне.
Вариации электрического поля морских волн наблюдаются только в небольшой зоне возле
кромки морской воды и не регистрируются на расстояниях >50 м.
Литература
1. Краев А. П. Основы геоэлектрики. Изд. второе. Л.: Недра, 1965. 295 с.
187
Проблемы прикладной гидрофизики
ДИНАМИКА СУТОЧНЫХ И ПОЛУСУТОЧНЫХ ПРИЛИВОВ
У ЮГО-ВОСТОЧНОГО ПОБЕРЕЖЬЯ ПОЛУОСТРОВА КАМЧАТКА
Д. А. Романенков1, канд. геогр. наук, Е. В. Софьина1,2, канд. физ.-мат. наук
1
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
2
Российский государственный гидрометеорологический университет, Санкт-Петербург, Россия
DYNAMICS OF DIURNAL AND SEMIDIURNAL TIDES OFF THE SOUTH-EASTERN
COAST OF THE KAMCHATKA PENINSULA
D. A. Romanenkov1, Ph.D., E. V. Sofina1, 2, Ph.D.
1
Shirshov Institute of Oceanology, RAS, Moscow, Russia
2
Russian State Hydrometeorological University, St. Petersburg, Russia
Численная конечно-объемная региональная модель FESOM-С была реализована для моделирования
баротропного прилива вдоль юго-восточной части п-ова Камчатка и прилегающей акватории. Получены
новые детальные приливные карты уровня и течений основных гармоник. Особенности прилива
объяснены с позиции волновой физики: в структуре прилива доминирует волна Кельвина, а в суточной
гармонике ощутимо влияние захваченных шельфовых волн, которое проявляется в выраженной
вдольбереговой изменчивости характеристик прилива. По результатам моделирования суммарного
прилива оценены максимальные течения, вихревые структуры и остаточная приливная циркуляция в
акватории.
The numerical finite-volume regional model FESOM-C was implemented to simulate the barotropic tide along the
southeastern part of the Kamchatka Peninsula and the adjacent water area. New detailed tidе and current maps
of the principal harmonics were obtained. The tidal features were explained from the position of wave physics:
the Kelvin wave dominates in the tidal structure, and the influence of trapped shelf waves is noticeable in the
diurnal harmonic, which is manifested in a pronounced longshore variability of tidal characteristics. Maximum
currents, eddy structures and residual tidal circulation in the water area were estimated based on the results of
total tide modelling.
Аккуратное воспроизведение приливов является необходимым условием для
моделирования сложных шельфовых и прибрежных процессов. Задача исследования состояла в
анализе результатов регионального моделирования баротропных приливов в акватории,
примыкающей к юго-восточному побережью Камчатки (рис. 1, а), которое будет использоваться
для изучения сложной динамики и гидрологии этой акватории с очень скудным набором
разнородных наблюдений. На данном этапе работы региональная модель FESOM-C была
реализована для расчета баротропного прилива (без учета эффектов стратификации).
Рис. 1. Район исследования и модельная область
а — батиметрия (м), I — Авачинский залив, II — мыс Шипунского; б — неструктурированная сетка
(цветом отображается средняя длина грани для каждого элемента в км)
188
Проблемы прикладной гидрофизики
Рис. 2. Эллипсы приливных течений основных гармоник
а — К1; б — М2; амплитуда скорости приливных течений (большая полуось приливного эллипса)
изображена цветом, эллипсы показаны после интерполяции характеристик течений на равномерную сетку
Конечно-объемная модель FESOM-C использует для расчета неструктурированные сетки
[1]. Для района, примыкающего к юго-востоку Камчатского полуострова, была построена
неструктурированная триангуляционная сетка с равномерно изменяющимся размером элементов
(рис. 1, б) и с локальным сгущением, допускающем надежное разрешение баротропного
масштаба, который в нашей модельной области варьируется от 50 до 2500 км. Число узлов
сетки — 37738, количество треугольных элементов — 74226, размер ребер элементов варьирует
от 330 м до 7800 м с минимальными значениями в мелководной области.
Для расчета моноприлива задавалась одна из двух гармоник: полусуточная М2 (период
Т=12,42 ч) или суточная К1 (период Т=23,93 ч) без учета астрономических аргументов и
нодальных множителей. Расчет велся до установления численного решения на
квазипериодический режим. Моноприлив устанавливался меньше чем за 20 периодов. Для
оценки гармонических постоянных моноприлива выполнялся анализ Фурье численного решения
за последний приливной цикл расчета. Сравнение результатов моделирования с мареографными
данными наблюдений было совмещено с экспериментами по чувствительности решения
региональной модели к заданию условий на открытой границе из глобальных моделей TPXO9 и
FES2014.
Результаты моделирования включают приливные карты уровня и течений суточного и
полусуточного приливов. На рис. 2 показаны эллипсы приливных течений. Течения суточной
гармоники преобладают над течениями полусуточной, обнаруживая усиление не только над
банкой у мыса Шипунский, но и на шельфе северной части Авачинского залива и в юго-западной
части области, где шельф становится заметно шире. Это может быть связано с образованием
шельфовых волн суточного диапазона. Их длины более чем на порядок короче длины основной
энергонесущей волны Кельвина, что и проявляется в наблюдаемой неравномерности приливных
характеристик [2].
Модельный суммарный прилив был инициирован заданием на открытой границе области
комбинацией 11 гармонических составляющих M2, S2, N2, K2, K1, O1, P1, Q1, Mf, Mm, M4.
Анализ суммарного прилива производился для синодического месяца 29,5 суток после
установления решения за 5 синодических месяцев. По результатам моделирования для
суммарного прилива были оценены максимальные скорости течений, остаточная циркуляция и
завихренность. Интегральной оценкой указанных характеристик может служить поле потоков
приливной энергии, осредненное за период расчета (рис. 3). Суммарный прилив создает фоновый
перенос энергии юго-западного направления во всей области и антициклонический вихрь к югу
от мыса Шипунский. Вдоль склонов каньонов модель предсказывает сдвиговые приливные
течения с резкими градиентами завихренности разного знака (не показаны). Локальное усиление
потоков энергии хорошо заметно в этой части Авачинского залива (рис. 3, врезка).
189
Проблемы прикладной гидрофизики
Рис. 3. Потоки энергии суммарного прилива
Численная модель приливной динамики была успешно реализована для моделирования
баротропного прилива вдоль юго-восточной части п-ова Камчатка и прилегающей акватории.
Получены новые детальные приливные карты уровня и течений основных гармоник в акватории.
Моделирование суммарного прилива было выполнено впервые для данного района. Оценены
максимальные течения и вихревые структуры, связанные с приливными течениями. Расчет
выявил значимую остаточную приливную динамику на шельфе и материковом склоне
Авачинского залива.
Литература
1. Androsov A., Fofonova V., Kuznetsov I. et al. FESOM-C v.2: coastal dynamics on hybrid unstructured
meshes // Geoscientific Model Development. 2019. Vol. 12. P. 1009−1028. doi:10.5194/gmd-12-1009-2019.
2. Ефимов В. В., Куликов Е. А., Рабинович А. Б., Файн И. В. Волны в пограничных областях океана.
Л.: Гидрометеоиздат, 1985. 280 с.
Исследование выполнено в рамках государственного задания МИНОБРНАУКИ РФ (тема
№ FMWE-2024-0028).
190
Проблемы прикладной гидрофизики
ТРАНСПОРТИРОВКА ПЕСЧАНЫХ БЕРЕГОВЫХ НАНОСОВ ПРИ КОНКРЕТНЫХ
УСЛОВИЯХ ПРИЛИВА В АКВАТОРИИ ГОРОДА ПОРТЛЕВЕН
О. Д. Шишкина, канд. техн. наук
Институт прикладной физики РАН, Нижний Новгород, Россия
TRANSPORTATION OF SANDY COASTAL SEDIMENTS UNDER SPECIFIC TIDE
CONDITIONS IN AQUATORIA OF PORTHLEVEN (UK)
O. D. Shishkina, Ph.D.
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Проведено исследование гидрологических параметров акватории юго-западной оконечности острова
Британия с целью оценки их влияния на приливные явления на примере береговой аномалии у
г. Портлевен 21.01.2015 г.
A study of the hydrological parameters of the water area of the south-western tip of the island of Britain was
performed to assess their impact on tidal phenomena basing on the example of a coastal anomaly near the town
of Porthleven on 21.01.2015.
Введение. В работе приведены результаты исследований гидрологических особенностей,
сопровождавших редкое явление короткопериодного взаимодействия прилива с конкретным
участком суши. В результате чего песчаный береговой покров сначала полностью исчез, а затем
через несколько часов был возвращен на берег практически в полном объеме. Описанные выше
события произошли 21 января 2015 года вблизи города Портлевен в Великобритании.
Гидрологические
и
метеорологические
условия.
Вертикальные
профили
горизонтальной компоненты скорости показали наличие на дату 21.01.2015 г. выраженного слоя
скачка скорости в прибрежной зоне на глубине ~4 м (рис. 1). Что свидетельствует о наличии
резкого перепада плотности (пикноклина) в приповерхностном слое на глубинах 3−5 метров.
При этом значения скорости в приповерхностном водном слое в эти дни были
максимальными за январь 2015 г.
Из выраженных особенностей параметров воздуха также отмечалось резкое изменение
направления приводного ветра с юго-восточного на северо-восточное из мористой части вдоль
береговой линии.
Метод исследования и результаты. Аналогично описанной выше природной аномалии
периодическое движение визуализирующих частиц над моделью шельфа наблюдалось в серии
лабораторных экспериментов по моделированию гидродинамики шельфовой зоны в двуслойной
жидкости (рис. 2) [1].
Рис. 1. Вертикальный профиль скорости V(H) вблизи г. Портлевен на 21 января 2015 г.
(https://earth.copernicus.com, дата обращения 13.06.2017 г.)
191
Проблемы прикладной гидрофизики
Рис. 2. Данные лабораторного эксперимента по визуализации траекторий частиц над шельфом
при движении вдоль него одиночной внутренней волны понижения [1]
В экспериментах солитон понижения высотой а формировался на границе раздела двух
жидкостей глубиной ℎ1 и ℎ2 различной плотности 𝜌𝜌1 < 𝜌𝜌2 . При прохождении солитона вдоль
модели шельфа высотой ℎ𝑆𝑆 во время первой половины периода внутренней волны
визуализирующие частицы смывались со дна шельфа в глубоководную часть бассейна, а затем
возвращались в зону визуализации.
Рассмотрим для натурных условий в исследуемой акватории модель двуслойной
жидкости. Величины характерных гидрологических параметров будут иметь следующие
значения: общая глубина акватории 𝐻𝐻 = 37 м, толщина верхнего квазиоднородного слоя ℎ1 =4 м,
толщина нижнего квазиоднородного слоя h2 = 33 м, глубина над шельфом 𝐻𝐻𝑆𝑆 =12 м, толщина
нижнего слоя над шельфом ℎ2𝑆𝑆 = 8 м. То есть, гидрологические условия соответствуют модели
двуслойной жидкости с верхним и нижним слоями конечной глубины.
В соответствии с методикой, предложенной и апробированной автором в работах [2−5],
можно рассчитать высоту уединенной волны, проходящей в шельфовой зоне вдоль береговой
линии в глубокой части акватории и вызывающей краевой эффект над шельфом в виде
периодического горизонтального течения. Уравнение для такой волны и указанных выше
гидрологических параметров можно записать в следующем виде [2]:
ℎ ⁄ℎ2 −ℎ2⁄ℎ1
ℎ2𝑆𝑆 ℎ2𝑆𝑆 𝐻𝐻
= |𝜂𝜂|
�ℎ H
2𝐻𝐻
2 S
1 + 𝜂𝜂 1
(1)
где 𝜂𝜂 — высота солитона; 𝐻𝐻 — глубина жидкости; ℎ1 — толщина верхнего слоя; h2 — толщина
нижнего слоя; 𝐻𝐻𝑆𝑆 — глубина двуслойной жидкости над шельфом; ℎ2𝑆𝑆 — толщина нижнего слоя
над шельфом.
В исследуемом случае уравнение (1) имеет решение при 𝜂𝜂1 =−4,6 м.
По натурным данным, средняя высота прилива у г. Портлевен составляет 4,7 м [6]. На
21.01.2015 г. высота прилива была 5,7 м (https://prilivy.com/uk/england/porthleven, дата обращения
24.01.2024 г.).
В случае совпадения фазы прилива с наличием пикноклина в приповерхностном слое воды
в акватории (рис. 1) формирование внутреннего солитона понижения высотой 𝜂𝜂=−4,6 м
становится реальным.
192
Проблемы прикладной гидрофизики
Рис. 3. Высота подвижных береговых наносов Z по ширине береговой линии L
до и после воздействия прилива (вверху) и разность высоты наносов (внизу) [6]
СПВС — средний уровень полной воды в сигизийный период
При таких условиях движение внутреннего солитона понижения вдоль береговой линии на
фоне высокого прилива может генерировать краевое периодическое течение в придонном слое
на мелководье.
На рис. 3 приведен пример координат профилей песчаных наносов до и после воздействия
прилива в зоне размыва у г. Годреви с идентичными г. Портлевен условиями — узким и длинным
пляжем вдоль залива [6]. При этом график разности этих величин (синяя линия на рис. 3) подобен
характерному асимметричному профилю бегущей уединенной волны с укрученным передним и
более пологим задним фронтом.
Однако, такой фронтальный накат уединенной волны на берег приводит к безвозвратным
потерям береговых наносов и не объясняет исследуемой аномалии.
Выводы. Результаты проведенных исследований дают основание для вывода о решающей
роли краевых внутренних волновых движений в формировании циклического характера
транспортировки песчаных береговых наносов при конкретных условиях прилива в акватории
г. Портлевен Что могло привести к природной аномалии, наблюдавшейся 21.10.2015 г.
Литература
1. Shishkina O. D., Sveen J. K., Grue J. Transformation of internal solitary waves at the «deep» and
«shallow» shelf: satellite observations and laboratory experiment // Nonlinear Proc. Geoph. 2013. Vol. 20, № 5.
P. 743–757. DOI: 10.5194/npg-20-743-2013.
2. Шишкина О. Д. Определение условий трехмерной трансформации нелинейных внутренних волн
по типу «мелкого» и «глубокого» шельфа: теория, натурные наблюдения, эксперимент // Тр. конф. 2016.
С. 177–180.
3. Шишкина О. Д., Литвин А. Д., Стецюк И. В. Оценка линейных и нелинейных параметров
внутренних волн в шельфовой зоне Каспийского моря по данным контактных и дистанционных измерений
// Тр. конф. 2018. C. 406−409. DOI: 10.29006/978-5-9901449-4-1-2018-113.
4. Шишкина О. Д. Линейные и нелинейные механизмы пространственной трансформации
внутренних волн на шельфе с горизонтальным и наклонным дном // Тр. конф. 2019. C. 995–999.
5. Шишкина О. Д. Исследование кинематики потока стратифицированной жидкости над поперечно
неоднородным дном // Тр. конф. 2023. С. 218-221.
6. Earlie C. S., Masselink G., Russell P.E., Shail R.K. Application of airborne LiDAR to investigate rates
of recession in rocky coast environments // J Coast Conserv. 2015. Vol. 19, № 6. P. 831–845.
DOI:10.1007/s11852-014-0340-1.
Работа автора финансируется из средств государственного задания (программа № FFUF-2024-0026).
193
Проблемы прикладной гидрофизики
ОЦЕНКА ЦУНАМИОПАСНОСТИ УЧАСТКОВ ПОБЕРЕЖЬЯ КАМЧАТКИ,
ПОРОЖДЕННОЙ ОХОТОМОРСКИМИ И ТИХООКЕАНСКИМИ
ПОДВОДНЫМИ ЗЕМЛЕТРЯСЕНИЯМИ
С. А. Бейзель1, канд. физ.-мат. наук, О. И. Гусев1, канд. физ.-мат. наук, В. К. Гусяков2, д-р физ.-мат. наук,
А. В. Ландер3, Д. В. Чебров4, канд. физ.-мат. наук, Л. Б. Чубаров1, д-р физ.-мат. наук
1
Институт вычислительных технологий СО РАН, Новосибирск, Россия
2
Институт вычислительной математики и математической геофизики СО РАН, Новосибирск, Россия
3
Институт теории прогноза землетрясений и математической геофизики РАН, Москва, Россия
4
ФИЦ «Единая геофизическая служба РАН», Камчатский филиал, Петропавловск-Камчатский, Россия
ASSESSMENT OF TSUNAMI HAZARD OF AREAS OF THE COAST
OF KAMCHATKA GENERATED BY THE SEA OF OKHOTS
AND PACIFIC UNDERWATER EARTHQUAKES
S. A. Beisel1, Ph.D., O. I. Gusev1, Ph.D., V. К. Gusiakov2, Dr.Sc., A. V. Lander3, D. V. Chebrov4, Ph.D.,
L. B. Chubarov1, Dr.Sc.
1
Institute of Computational Technologies SB RAS, Novosibirsk, Russia
2
ICM&MG SB RAS, Novosibirsk, Russia
3
IEPT RAS, Moscow, Russia
4
Kamchatka Regional Seismological Center, GS RAS, Petropavlovsk-Kamchatskiy, Russia
В докладе представлены результаты оценки цунамиопасности двух участков охотоморского и
беринговоморского побережий Камчатки, необходимые для решения проблем хозяйственного освоения
этих территорий. Работа выполнялась с использованием методик наихудшего случая с оценкой
повторяемости выбранных сценарных событий. По результатам анализа сейсмотектоники основных
цунамигенных зон, угрожающих этим участкам побережья, и исторических данных о проявления цунами
на них, определялись параметры очагов наиболее опасных цунамигенных землетрясений, выполнялось
численное моделирование распространения и наката цунами, результаты которого позволили
определить параметры цунамиопасности для этих участков побережья.
The report presents the results of assessing the tsunami hazard of two sections of the Sea of Okhotsk and Bering
Sea coasts of Kamchatka, which are necessary to solve the problems of economic development of these territories.
The work was carried out using worst-case techniques with an assessment of the recurrence of selected scenario
events. Based on the results of the analysis of the seismotectonics of the main tsunamigenic zones that threaten
these sections of the coast and historical data on the occurrence of tsunamis on them, the source parameters of
the most dangerous tsunamigenic earthquakes were determined. Based on them, numerical modeling of the
propagation and run-up of the tsunami was carried out, the results of which made it possible to determine the level
of tsunami hazard for these sections of the coast.
Целью исследования было получение оценок цунамиопасности участка охотоморского
побережья Камчатки в районе посёлка Октябрьский и участка беринговоморского побережья в
районе посёлка Корф. Получение таких оценок необходимо для определения рисков нарушения
транспортной доступности этих населенных пунктов и функционирования важных
хозяйственных объектов на их территории. Оба поселка расположены на узких песчаногалечных косах, ширина которых не превышает 500−600 м, при этом максимальные высоты над
уровнем моря не превышают 4−5 м, что при отсутствии безопасных путей и мест для эвакуации
делает эти посёлки чрезвычайно уязвимым даже при умеренных по силе цунами.
Оценки цунамиопасности были получены с использованием методики экстремального
(наихудшего) случая на основе численного моделирования генерации цунами сейсмогенными
источниками, распространения по прилегающим акваториям и наката на берег.
На первом этапе исследования определялись цунамигенные зоны, представляющие
основную опасность для исследуемых участков побережья. Для пос. Октябрьский потенциально
опасной цунамигенной зоной является акватория, прилегающая к северо-восточному побережью
Сахалина, где располагался очаг сильнейшего из зарегистрированных на Сахалине
Нефтегорского землетрясения 27 мая 1995 г. В качестве максимально сильных цунамигенных
землетрясений этой зоны были выбраны очаги магнитуды Mw=7,6 и 8,0, имеющие механизм
типа взброса по вертикальной плоскости разрыва. Средний период повторяемости
194
Проблемы прикладной гидрофизики
землетрясений с М>8 для этой зоны, полученный путем экстраполяции графика повторяемости
мелкофокусных сахалинских землетрясений за инструментальный период (1904−2024)
составляет ~60 лет. Считая, что реально опасными для Октябрьской косы могут быть только
землетрясения с охотоморской стороны сахалинского побережья, можно принять оценку
повторяемости предельно возможных (М~8) подводных землетрясений сахалинского шельфа в
100 лет.
Другой опасной цунамигенной областью для пос. Октябрьский следует считать достаточно
протяженный участок Курило-Камчатской сейсмогенной зоны в районе Северных Курил и
южной Камчатки, где располагался очаг катастрофического землетрясения 4 ноября 1952 г. Из
этой зоны волны цунами могут проникать в акваторию Охотского моря через несколько широких
и достаточно глубоких проливов (Крузенштерна, Севергина, Четвёртый и Первый Курильские).
Анализ исторических данных о проявлениях цунами из этой зоны в Охотское море и результаты
численного моделирования показывают, что реальную опасность для охотоморского побережья
Камчатки могут создавать только подводные мега-землетрясения с предельно возможными
магнитудами (9,0). Оценка повторяемости таких землетрясений в районе Восточной Камчатки и
Северных Курил (300–400 лет) получена на основе данных о повторяемостях сильнейших
землетрясений в других субдукционных зонах Тихого океана: Тохоку (500–600 лет), Каскадия
(350–400 лет), Чили (~400 лет), а также в суматранской субдукционной зоне (~450 лет).
При исследовании цунамиопасности посёлка Корф были рассмотрены три группы
потенциально опасных очагов. К первой, ближайшей к посёлку, относятся местные очаги,
расположенные вдоль края шельфа, маркирующего зону контакта западной границы
Североамериканской плиты с Охотской плитой. Ко второй группе относятся региональные очаги
в западном и центральном сегментах Алеутской сейсмической зоны. Наконец, исторические
данные и результаты численного моделирования показывают, что определённую опасность для
района Карагинского залива могут представлять и удалённые Тихоокеанские очаги, в первую
очередь, из чилийской зоны.
Численное моделирование генерации цунами выполнялось в рамках общепринятой
«поршневой» модели сейсмического источника Подъяпольского-Гусякова-Окады [1, 2].
Трансформация волн цунами на трассах от очага до побережья моделировалась в рамках
нелинейной модели мелкой воды, аппроксимированной конечно-разностной схемой типа
МакКормака [3] на стадии распространения волн и алгоритмом типа метода крупных частиц
[4, 5] для моделирования наката волн на берег. Расчёты проводились с использованием системы
кодов, интегрированных в составе пакета MGC [6, 7].
Детальное моделирование распространения и наката цунами на побережье показало, что
максимальные высоты подъёма воды в районе Октябрьской косы и пос. Октябрьский для
«сахалинского» источника магнитудой M=8, а также одного из вариантов субдукционного мегаземлетрясения магнитуды M=9, расположенного целиком в пределах Северных Курил,
составляют от 4 до 5 м., при этом переливания через косу практически не происходит, за
исключением нескольких точек, в которых толщина слоя жидкости невелика. Для одного из
вариантов «аномального», до сих пор не наблюдавшегося в реальности, курило-камчатского
мега-землетрясения с механизмом типичным для «цунами-землетрясений» [8]. высоты подъёма
воды в районе Октябрьского превышают 5 м., а чуть севернее, вдоль дороги, ведущей к посёлку,
достигают 7 м., при этом переливание наблюдается на большей части Октябрьской косы.
Поэтому при принятии проектных решений можно исходить из оценок максимальных
высот цунами для пос. Октябрьский в 4−5 м., обеспечиваемых наиболее вероятными и
реалистичными вариантами цунамигенных землетрясений на сахалинском шельфе и на северокурильском участке Курило-Камчатской субдукционной зоны.
Результаты численного моделирования волн цунами в акваториях, прилегающих к
пос. Корф, показали, что наиболее опасный модельный источник «беринговоморской» зоны
(M~8) порождает цунами на Корфской косе с амплитудой <2 м, поэтому перелива через косу нет.
Средний период повторяемости таких землетрясений составляет около 80 лет.
Для регионального «алеутского» источника (M~9) максимальные амплитуды волн вблизи
пос. Корф составляют от 2 до 3 м, что допускает возможность затопления поселка и перелива
через Корфскую косу. Средний период повторяемости таких землетрясений составляет порядка
150 лет.
195
Проблемы прикладной гидрофизики
Для наиболее опасного удаленного источника (M~9) в «южно-чилийской» зоне
максимальные амплитуды волн в районе пос. Корф составляют порядка 3 метров и здесь
возможно переливание в северной части косы, при этом волна может доходить до посёлка.
Средний период повторяемости предельно сильных (М~9,5) землетрясений в районе Южного
Чили составляет 300−400 лет.
В случаях экстремальных регионального и дистанционного источников при возможном
переливании косы суммарное время затопления и глубина заливания остаются небольшими
(менее 10 мин и 0,5 м, соответственно), однако, при этом могут возникать высокие скорости
потока воды (до 5 м/с).
Литература
1. Гусяков В. К. Остаточные смещения на поверхности упругого полупространства // Условнокорректные задачи математической физики в интерпретации геофизических наблюдений. Новосибирск:
ВЦ СО РАН, 1978. C. 23–51.
2. Okada Y. Surface deformation due to shear and tensile faults in a half-space // Bull. Seism.Soc. Am.
1985. Vol. 75, № 4. P. 1135–1154.
3. MacCormack, R. W. The Effect of viscosity in hypervelocity impact cratering, AIAA Paper. 1969.
Р. 69−354.
4. Рычков А. Д., Бейзель С. А., Чубаров Л. Б. Программа для ЭВМ: Модуль расчета наката волн
цунами на берег RunUp-LP // Свидетельство о государственной регистрации программы для ЭВМ
Федеральной службой по интеллектуальной собственности, патентам и товарным знакам № 2013617980.
2013.
5. Shokin Yu. I., Rychkov A. D., Khakimzyanov G. S., Chubarov L. B. A combined computational algorithm
for solving the problem of long surface waves runup on the shore // Russian Journal of Numerical Analysis and
Mathematical Modelling. 2016. Vol. 31, № 4. P. 217−225
6. Shokin Yu. I., Babailov V. V., Beisel S. A., Chubarov L. B., Eletsky S. V., Fedotova Z. I., Gusyakov V. K.
Mathematical modeling in application to regional tsunami warning systems operations / Ed. E. Krause et al. //
Comp. Science & High Perf. Computing III, Notes on Numerical Fluid Mechanics and Multidisciplinary Design.
2008. Vol. 101. P. 52−68.
7. Чубаров Л. Б., Бабайлов В. В., Бейзель С. А. Программа расчета характеристик волн цунами
сейсмического происхождения MGC // Свидетельство о государственной регистрации программы для
ЭВМ Федеральной службой по интеллектуальной собственности № 2011614598. 2011.
8. Kanamori H. Mechanism of tsunami earthquakes // Phys. Earth Planet. Inter. 1972. Vol. 6. P. 346−359.
196
Проблемы прикладной гидрофизики
ЧИСЛЕННОЕ ИССЛЕДОВАНИЕ ВОЗДЕЙСТВИЯ ДЛИННЫХ ПОВЕРХНОСТНЫХ
ВОЛН НА НЕПОДВИЖНОЕ ПОЛУПОГРУЖЕННОЕ СООРУЖЕНИЕ
О. И. Гусев1, канд. физ.-мат. наук, В. С. Скиба1,2, Г. С. Хакимзянов1, д-р физ.-мат. наук,
Л. Б. Чубаров1, д-р физ.-мат. наук
1
Федеральный исследовательский центр информационных и вычислительных технологий, Новосибирск,
Россия
2
Новосибирский национальный исследовательский государственный университет, Новосибирск, Россия
NUMERICAL STUDY OF THE EFFECT OF LONG SURFACE WAVES ON A
STATIONARY PARTIALLY IMMERSED STRUCTURE
O. I. Gusev1, Ph.D., V. S. Skiba1,2, G. S. Khakimzyanov1, Dr.Sc., L. B. Chubarov1, Dr.Sc.
1
Federal Research Center for Information and Computational Technologies, Novosibirsk, Russia
2
Novosibirsk State University, Novosibirsk, Russia
Представлены результаты численного моделирования взаимодействия длинных поверхностных волн с
большими неподвижными полупогруженными в воду прибрежными сооружениями. Анализ наиболее
важных для практики характеристик взаимодействия (максимальный заплеск на грани сооружения,
максимальная силовая нагрузка на него) выполнялся в рамках иерархической цепочки математических
моделей в различных приближениях (трехмерное, двумерное, одномерное). Получены зависимости таких
характеристик от высоты, длины и формы набегающих волн, от степени неровности дна в месте
установки сооружения, его формы, осадки и расположения относительно берега или причальной стенки.
The results of numerical modelling of the interaction of long surface waves with large stationary semi-submerged
coastal structures are presented. The analysis of the most important practical interaction characteristics
(maximum free surface elevation along each edge of the structure and maximum load on it) was carried out within
a hierarchical chain of mathematical models in various approximations (three-dimensional, two-dimensional,
one-dimensional). The dependencies of these characteristics on the height, length and shape of the incoming
waves, the degree of bottom roughness at the location of the structure, the shape of the structure, the draught and
the position relative to the shore or mooring wall were determined.
Введение. При проектировании и эксплуатации крупных полупогруженных в воду
неподвижных сооружений необходимо учитывать возможность воздействия на них длинных
поверхностных волн типа цунами. Характеристики взаимодействия поверхностных волн
с такими сооружениями зависят от многих факторов, наиболее значимыми из которых в случае
длинных волн являются высота, длина и форма набегающей волны, неровность дна в месте
установки, форма конструкции, ее осадка, расположение относительно берега или причальных
сооружений.
Наиболее изученными являются характеристики взаимодействия волн с конструкциями,
расположенными над горизонтальным дном. Наряду с аналитическими методами [1] и
лабораторными экспериментами [2] в исследованиях используются и методы численного
моделирования. Для детального изучения применяются численные методы, основанные на
сложных математических моделях вязких турбулентных течений жидкости [3]. Однако в
некоторых диапазонах определяющих параметров расчет таких важных характеристик, как
максимальный заплеск на грани сооружения и максимальная силовая нагрузка на него, может
быть выполнен с достаточной для практических приложений точностью в рамках упрощенных
моделей. Так, в настоящей работе основной является нелинейно-дисперсионная SGN-модель
(Serre‒Green‒Naghdi) мелкой воды второго длинноволнового приближения [4].
Математическая модель. При решении задач в рамках плановой 2DSGN-модели
расчетной областью является проекция D трехмерной области, занятой жидкостью, на
координатную плоскость Ox1 x2 (рис. 1). Область D разбивается на внешнюю D e и внутреннюю
D i области, которые являются проекциями трехмерных областей Ωe ( t ) (вне тела) и Ωi (под
телом).
197
Проблемы прикладной гидрофизики
а
б
Рис. 1. Схема области течения в задаче о взаимодействии поверхностных волн
с полупогруженным неподвижным телом
а — трехмерная постановка задачи; б — плановая постановка задачи
Во внешней области D e течение моделируется в рамках 2DSGN-модели, система
уравнений которой имеет следующий вид:
H t + ∇ ⋅ ( Hu ) = 0 ,
( ρ Hu )t + f + f + ∇p = p∇h ,
1
x1
2
x2
198
ρ Hu12
f =
,
ρ Hu1u2
1
ρ Hu1u2
. (1)
f2 =
2
ρ Hu2
Проблемы прикладной гидрофизики
Здесь t — время, ∇ = ( ∂ / ∂x1 , ∂ / ∂x2 ) ; u = ( u1 , u2 ) — осредненная по глубине горизонтальная
компонента вектора скорости трехмерного течения; H= η + h — полная глубина; y = η ( x, t )
— свободная поверхность; y = − h ( x ) — рельеф дна, x = ( x1 , x2 ) ; ρ — плотность жидкости.
Через эти переменные выражается проинтегрированное по глубине давление p и давление на
дне p [4]. Реконструированное по p (x, t ) трехмерное распределение P (x, y, t ) давления
используется для расчета горизонтальной составляющей вектора силовой нагрузки на
полупогруженное тело.
Уравнения во внутренней области D i приближенно описывают трехмерное
нестационарное течение воды между дном акватории и днищем y = d ( x ) полупогруженной
конструкции:
∇ ⋅ ( Su ) = 0 ,
( ρ Su )t + f x1 + f x2 + ∇p = p∇h + pˆ ∇d ,
1
2
ρ Su12
f1 =
,
ρ Su1u2
ρ Su1u2
, (2)
f2 =
2
ρ Su2
где 0 < S ( x ) = h ( x ) + d ( x ) — толщина слоя жидкости под телом; u ( x,t ) — осредненная по
этой толщине горизонтальная компонента скорости трехмерного течения под телом;
p ( x, t ) — проинтегрированное по толщине слоя давление, функция pˆ ( x, d (x), t ) описывает
распределение давления на днище тела и используется для расчета вертикальной компоненты
силовой нагрузки на тело.
На общей границе Γ областей D i и D e применяются условия сопряжения, которые
связывают давление и скорость по разные стороны от Γ [4].
Результаты расчётов. Численный анализ выполнялся в рамках иерархической цепочки
математических моделей с применением конечно-разностных методов на прямоугольных или
криволинейных сетках. Качество воспроизведения трехмерных эффектов оценивалось
сопоставлением результатов, полученных в рамках 2DSGN- и 3DFNPF- (Fully Nonlinear Potential
Flows) [5] моделей. Важность учета дисперсии волн оценивалась сравнением результатов
расчетов в рамках 2DSGN-модели и плановой бездисперсионной 2DNSWE-модели первого
длинноволнового приближения (Nonlinear Shallow Water Equations). В случае слабой
зависимости параметров течения от одной из горизонтальных координат удовлетворительные
результаты получены также в рамках одномерных (1DSGN-, 1DNSWE-) моделей мелкой воды.
Для таких задач «эталонными» являлись результаты расчетов на основе двумерной (2DFNPF-)
[6, 7] и трехмерной (3DFNPF-) моделей. Показано, что использование менее затратных, но
обеспечивающих достаточную точность алгоритмов на основе моделей мелкой воды
существенно снижает требования к объему необходимых вычислительных ресурсов.
Иерархический подход позволил определить допустимые диапазоны параметров задач для
применимости моделей мелкой воды. Использование одномерных (1DSGN-, 1DNSWE-) моделей
мелкой воды приводит, как правило, к завышенным оценкам силового воздействия длинных волн
на полупогруженные сооружения, поскольку при этом не учитывается дифракция волн.
Бездисперсионные (1DNSWE-, 2DNSWE-) модели также дают завышенную оценку этой
характеристики, поскольку при использовании таких моделей в расчетах передний фронт
набегающей волны становится более крутым, чем для моделей (1DSGN-, 2DSGN-),
учитывающих дисперсию волн. По результатам расчётов сделаны следующие выводы:
− наиболее опасными для полупогруженных сооружений являются длинные N-волны c
лидирующей волной понижения;
− наибольшее влияние неровности дна в виде длинных впадин или возвышений
оказывают на горизонтальную составляющую силовой нагрузки на сооружение;
− во многих случаях максимум горизонтальной составляющей волновой силы возникает
при воздействии на тело отражённой от берега волны, при этом экстремальные значения зависят
от положения тела (у подножья склона или вблизи берега) и могут различаться в несколько раз;
199
Проблемы прикладной гидрофизики
− при расположении сооружения вблизи причальной стенки возникает резонанс длинных
волн с существенным увеличением силовых нагрузок на него и заплеска на тыльную грань по
сравнению с расположением в открытой акватории.
Некоторые результаты исследований представлены в публикациях [7–10].
Литература
1. Fang Q., Guo A. Analytical and experimental study of focused wave action on a partially immersed box
// Math. Probl. Eng. 2019. Art. 9850302.
2. Беляев Н. Д., Лебедев В. В., Нуднер И. С., Семенов К. К., Щемелинин Д. И. Экспериментальное
определение нагрузок на плавучий объект от воздействия волн цунами // ГеоРиск. 2022. Т. 16, № 1.
С. 20−30.
3. Ma G., Farahani A. A., Kirby J. T., Shi F. Modeling wave-structure interactions by an immersed
boundary method in a σ -coordinate model // Ocean Eng. 2016. Vol. 125. P. 238–247.
4. Khakimzyanov G., Dutykh D. Long wave interaction with a partially immersed body. Part I:
Mathematical models // Commun. Comput. Phys. 2020. Vol. 27, № 2. P. 321–378.
5. Гусев О. И., Хакимзянов Г. С., Чубаров Л. Б. Оценка силового воздействия длинных
поверхностных волн на заякоренный гидротехнический объект методами численного моделирования // Тр.
XV Всерос. конф. «Прикладные технологии гидроакустики и гидрофизики» 2020. С. 239–242.
6. Камынин Е. Ю., Максимов В. В., Нуднер И. С., Семенов К. К., Хакимзянов Г. С. Исследование
взаимодействия уединенной волны с частично погруженным неподвижным сооружением //
Фундаментальная и прикладная гидрофизика. 2010. № 4(10). C. 39–54.
7. Гусев О. И., Скиба В. С., Хакимзянов Г. С. Силовое воздействие длинных поверхностных волн
на полупогруженное в воду тело. I. Влияние формы набегающей волны // Вычисл. технологии. 2022. Т. 27,
№ 4. С. 33–62.
8. Гусев О. И., Скиба В. С., Хакимзянов Г. С., Чубаров Л. Б. Численный анализ характеристик
взаимодействия уединенной волны с неподвижным полупогруженным телом прямоугольного сечения //
ПМТФ. 2023. Т. 64, № 6. C. 119–132.
9. Gusev O. I., Khakimzyanov G. S., Skiba V. S., Chubarov L. B. Shallow water modeling of wave-structure
interaction over irregular bottom // Ocean Eng. 2023. Vol. 267. Art. 113284.
10. Gusev O. I., Khakimzyanov G. S., Skiba V. S., Chubarov L. B. Numerical modeling of the long surface
wave impact on a partially immersed structure in a coastal zone. I. Solitary waves over a flat slope // Physics of
Fluids. 2023. Vol. 35, № 8. Art. 087124.
Работа выполнена в рамках государственного задания Министерства науки и высшего образования
РФ для Федерального исследовательского центра информационных и вычислительных технологий и при
финансовой поддержке Российского научного фонда (код проекта 21-71-00127).
200
Проблемы прикладной гидрофизики
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПРОХОЖДЕНИЯ ВОЛНЫ
ЧЕРЕЗ ЧАСТИЧНО ПРОНИЦАЕМЫЙ ЭКРАН
Ю. В. Максимова
Санкт-Петербургский государственный университет промышленных технологий и дизайна,
Санкт-Петербург, Россия
DETERMINATION OF WAVE TRANSMISSION COEFFICIENT
THROUGH A PARTIALLY PERMEABLE SCREEN
Yu. V. Maximova
St. Petersburg State University of Industrial Technologies and Design, St. Petersburg, Russia
В работе рассматривается задача о воздействии поверхностных волн на частично проницаемый экран в
жидкости конечной глубины. Задача решается в плоской постановке. Решение линейной задачи сводится
к интегральному уравнению Фредгольма 1-го рода, решение которого осуществляется методом
регуляризации Тихонова с параметром регуляризации по невязке. Приведено сравнение полученного
численного решения с аналитическим решением для коэффициента прохождения волны.
The paper considers the problem of the influence of surface waves on a partially permeable screen in a liquid of
finite depth. The problem is solved in a flat formulation. The solution to the linear problem is reduced to the
Fredholm integral equation of the 1st kind, the solution of which is carried out by the Tikhonov regularization
method with the residual regularization parameter. A comparison of the obtained numerical solution with the
analytical one for the wave transmission coefficient is given.
Рассмотрим задачу о фронтальном прохождении монохроматической волны через
частично проницаемую стенку. Движение жидкости осуществляется в плоскости xy , причем ось
x направлена вдоль волнового вектора на свободной поверхности покоящейся жидкости, а ось
y направлена вертикально вверх. Начало координат расположено в верхней точке экрана.
Движение жидкости происходит в области, которая ограничена сверху свободной
поверхностью y = η ( x, t ) , снизу — горизонтальным непроницаемы дном y = − H . Будем
полагать его безвихревым. В этом случае скорость движения жидкости представляется в виде
∂ ∂
, − оператор Гамильтона,
=
ϕ ϕ ( x, y, t ) − потенциал скорости
∂
x
∂y
где ∇
v = ∇ϕ , =
жидкости, удовлетворяющий, в силу безвихревого движения и несжимаемости жидкости,
уравнению Лапласа [1]
∂ 2ϕ ( x, y, t ) ∂ 2ϕ ( x, y, t )
+
=
0
∂x 2
∂y 2
(1)
Укажем условие непротекания жидкости через дно
∂ϕ
= 0, y = − H .
∂y
(2)
Кроме того, поставим условие на ограниченность потенциала скорости движения жидкости на
бесконечности
∇ϕ < ∞, x → ±∞.
(3)
Дополнительно поставим условие частичной проницаемости на вертикальной стенке:
201
Проблемы прикладной гидрофизики
m( y)
∂ϕ− ∂ϕ+
=
= u ( y, t ) , p+ = p− , x= 0, − H ≤ y < η .
∂x
∂x
(4)
В этих выражениях x = 0 задаёт положение стенки, m ( y ) − коэффициент проницаемости,
такой, что 0 ≤ m ( y ) ≤ 1. Нижний индекс ( − ) соответствует области, где x < 0, индекс ( + ) −
области x > 0.
В линейном случае кинематическое и динамическое условия на свободной поверхности
сводятся к одному, смешанному, линейному уравнению 2-го порядка в частных производных,
заданному на уровне невозмущённого состояния границы жидкости [1]
∂ 2ϕ
∂ϕ
+g
= 0, y = 0.
2
∂t
∂y
(5)
Гидродинамическое давление и ордината свободной поверхности в линейном случае
выражаются уравнениями [1]
∂ϕ
1 ∂ϕ
=
−
− gy, η ( x, t ) =
−
( x, 0, t ) .
ρ
∂t
g ∂t
p
(6)
Будем рассматривать периодические по времени решения с частотой ω. Перейдем,
согласно [2], к выражениям для потенциала скоростей и горизонтальной скорости
ϕ=
Re {Φ ( x, y ) exp ( −iωt )} , u =
Re {U ( y ) exp ( −iωt )}.
(7)
При подстановке этих выражений в уравнение Лапласа (1) и условие на дне (2) получим функции
вида
exp ( ±ikx ) ch k ( y + H ) .
Смешанное граничное условие (5) приводит к уравнению для определения k :
k th kH =
ω2
g
.
(8)
Полученное трансцендентное уравнение имеет два вещественных и счетное множество чисто
мнимых корней вида [3]
1, 2, .
± k , ± iκ n , k > 0, κ n > 0, n =
(9)
Функции, которые соответствуют этим корням,
chk ( y + H ) , cos κ n ( y + H ) , − H ≤ y ≤ 0, n =
1, 2,
(10)
образуют систему ортогональных функций.
С учетом ограниченности потенциала скоростей на бесконечности, представим его в
областях, ограниченных стенкой, в виде:
ω
ϕ− ( A1 exp(ikx) + A2 exp(−ikx) ) ch k ( y + H ) + ∑ α n exp (κ n ( y + H ) ) exp ( −iωt ) , x < 0,
=
n =1
∞
ϕ+ B exp ( ikx ) ch k ( y + H ) + ∑ β n exp ( −κ n ( y + H ) ) exp ( −iωt ) , x > 0.
=
n =1
202
(11)
(12)
Проблемы прикладной гидрофизики
Здесь A1 — коэффициент, характеризующий амплитуду набегающей волны; A2 , α n —
коэффициенты, определяющие спектр отражённой
описывающие спектр прошедшей сквозь экран волны.
Запишем граничные условия на экране (4):
волны;
B, β n
—
коэффициенты,
∞
( A1 + A2 ) ch k ( y + H ) + ∑ α n cos κ n ( y + H ) =
n =1
∞
= B ch k ( y + H ) + ∑ β n cos κ n ( y + H ) ,
(13)
n =1
∞
m ( y ) ik ( A1 − A2 ) ch k ( y + H ) + ∑ κ nα n cos κ n ( y + H ) =
n =1
∞
= ikB ch k ( y + H ) − ∑ β n cos κ n ( y =
+ H ) U ( y ).
(14)
n =1
Из уравнения (13) получаем:
A1 + A2 −=
B 0, =
α n βn , =
n 1, 2,.
(15)
Из представления для U ( y ) [4]:
sh 2kH + 2kH
,
ikγ B =
∫− H chk ( y + H )U ( y ) dy, γ =4k
0
−κ nδ n=
βn
0
δ
∫ cos κ ( y + H )U ( y )dy, =
n
n
−H
sin 2κ n H + 2κ n H
.
4κ n
(16)
Из условия для расхода (14), получим интегральное уравнение Фредгольма 1-го рода для
определения горизонтальной скорости U ( y ) :
0
K ( y,η )U (η ) dη 2ikm ( y ) A ch k ( y + H ) ,
∫=
1
где
(17)
−H
4k
ch k ( y + H ) ch k (η + H ) +
2kH + sh ( 2kH )
K ( y,η )
=
∞
+4 1 + m ( y ) ∑
n =1
κn
2κ n H + sin ( 2κ n H )
cos κ n ( y + H ) cos κ n (η + H ) .
(18)
Если m = const, то граничные условия на стенке приводят к уравнениям:
A1 + A=
B, α=
β n , m ( A1 − A2=
) B, mα n + β=n 0.
2
n
(19)
β=
0.
Из условий (19) непосредственно следует, что m + 1 =
0 при α n ≠ 0. Поэтому α=
n
n
Коэффициент прохождения сквозь стенку в этом случае будет равен [4]
203
Проблемы прикладной гидрофизики
Kt =
2m
.
m +1
(20)
Известно [5], что задача нахождения решения интегральных уравнений Фредгольма 1-го
рода является некорректной. Для регуляризации исходного уравнения применяются
дополнительные специальные процедуры, приводящие к интегрированию в функциональных
пространствах. Полученное уравнение (18) решалось методом регуляризации А. Н. Тихонова с
выбором параметра регуляризации по невязке [6].
Результаты численного моделирования коэффициента прохождения волны через
частично-проницаемый экран приведены в табл. 1.
Таблица 1
Сравнение зависимости коэффициента прохождения Kt от коэффициента проницаемости стенки
Коэффициент
проницаемости, m
0,10
0,30
0,50
0,70
0,90
Коэффициент прохождения, Kt
Аналитическое
Численное
решение
решение
0,181818
0,461538
0,666667
0,823529
0,947368
0,181687
0,461206
0,666187
0,822936
0,946686
Относительная
ошибка
0,000721
0,000719
0,000720
0,000720
0,000720
Приведем значения других выбранных параметров: глубина жидкости H = 25 м, длина
волны λ = 100 м. Частота волны ω находилась по глубине жидкости и длине волны из
известного трансцендентного уравнения [1]:
ω= g
2π
2π
th
H .
λ λ
(21)
Количество учитываемых членов разложения для получения требуемой точности для
данного набора данных оказалось n = 26. Следует заметить, что принятые значения длины
волны и глубины жидкости являются несущественными при проведении указанных расчетов. Их
реальные значения диктуются конкретной прикладной задачей.
Следует отметить хорошее согласие аналитического и численного решения. Программная
реализация полученного результата позволяет оценивать защитную функцию сооружения типа
«вертикальная стенка» при достаточно широком выборе функции m = m ( y ) , характеризующей
коэффициент проницаемости.
В дальнейших исследованиях предполагается последовательная верификация
разработанного алгоритма и его использование в расчётах для различных функций
проницаемости вертикального экрана.
Литература
1. Кочин Н. Е., Кибель И. А., Розе Н. В. Теоретическая гидромеханика. Ч.1. М.: Физматгиз, 1963. 584 с.
2. Алешков Ю. З. Теория волн на поверхности тяжелой жидкости: Учеб. пособие. Л.: изд-во Ленинградского
университета, 1981. 196 с.
3. Нуднер И.С. О дифракции волн неподвижным доком //Тр. коорд. совещ. по гидротехнике. Л.: ВНИИГ, 1972.
Вып.75. С.148–53.
4. Алешков Ю. З. Прохождение волн над вертикальным барьером // Гидроаэромеханика и теория упругости.
Днепропетровск. 1981. № 27. С. 3–12.
5. Тихонов А. Н., Гончарский А.В., Степанов В. В., Ягола А. Г. Численные методы решения некорректных
задач. М.: Наука, 1990. 232 с.
6. Тихонов А. Н., Арсенин В. Я. Методы решения некорректных задач. М.: Наука, 1979. 288 с.
204
Проблемы прикладной гидрофизики
ВОЛНОВАЯ ДИНАМИКА СТРАТИФИЦИРОВАННЫХ СРЕД С ФОНОВЫМИ
СДВИГОВЫМИ ТЕЧЕНИЯМИ: АНАЛИТИЧЕСЕКИЕ РЕШЕНИЯ,
КРИТИЧЕСКЕИЕ РЕЖИМЫ, ПРИЛОЖЕНИЯ
В. В. Булатов, д-р физ.-мат. наук
Институт проблем механики им. А. Ю. Ишлинского РАН, Москва, Россия
WAVE DYNAMICS OF STRATIFIED MEDIA WITH BACKGROUND SHEAR FLOWS:
ANALYTICAL SOLUTIONS, CRITICAL MODES, APPLICATIONS
V. V. Bulatov, Dr.Sc.
Ishlinsky Institute for Problems in Mechanics of the RAS, Moscow, Russia
Рассмотрены задачи описания динамики внутренних гравитационных волн в стратифицированных
средах с горизонтальными сдвиговыми течениями при критических режимах волновой генерации.
Обсуждены модельные физические постановки задач, в которых могут возникать критические уровни.
Изучены аналитические свойства решений вблизи критических уровней. Рассмотрена постановка задачи
о потоке стратифицированной среды, набегающим на препятствие, за которым могут возникать
уходящие волны, при этом особенность на критическом уровне формируется вдали от препятствия.
Построены асимптотики решений вблизи критических уровней.
The problems of describing the dynamics of internal gravity waves in stratified media with horizontal shear flows
under critical modes of wave generation are considered. Model physical formulations of problems in which critical
levels may arise are discussed. The analytical properties of solutions near critical levels are studied. The
formulation of the problem of a flow of a stratified medium impinging on an obstacle behind which outgoing waves
can arise is considered, while a singularity at the critical level is formed far from the obstacle. Asymptotic
expressions of solutions near critical levels are constructed.
В реальных природных стратифицированных средах (океан, атмосфера) вертикальная и
горизонтальная динамика фоновых сдвиговых течений в значительной степени связана с
внутренними гравитационными волнами (ВГВ). В океане такие течения могут проявляться,
например, в области сезонного термоклина и оказывать заметное влияние на динамику ВГВ.
Обычно предполагается, что фоновые течения с вертикальным сдвигом скорости слабо зависят
от времени и горизонтальных координат. Если масштаб изменения течений по горизонтали
много больше длин ВГВ, а масштаб временной изменчивости много больше периодов ВГВ, то
такие течения можно рассматривать как стационарные и горизонтально однородные. В общей
постановке описание динамики ВГВ в стратифицированной среде с фоновыми полями
сдвиговых течений является весьма сложной задачей уже в линейном приближении. В этом
случае задача сводится к анализу системы уравнений в частных производных, и при
одновременном учете вертикальной и горизонтальной неоднородности эта система уравнений не
допускает разделение переменных [1, 2]. Генерация ВГВ сдвиговыми течениями представляют
собой важный для геофизических приложений пример взаимодействия волн с
гидродинамическими потоками. При распространении ВГВ в сдвиговых потоках возникают
специфические эффекты, связанные с усилением и поглощением волн. Это происходит при
наличии резонансных слоев, в которых скорость потока совпадает с фазовой или групповой
скоростью внутренних гравитационных волн. Критические слои играют важную роль в
механизме
гидродинамической
неустойчивости
сдвиговых
течений.
Резонансное
взаимодействие волн с критическими слоями является важным механизмом генерации и
поглощения различных типов волн в атмосфере, океане, движущейся плазме. Сильное
взаимодействие распространяющейся волны с потоком возможно также в тех слоях, где частота
волны совпадает с частотами собственных колебаний неоднородного потока. В этом случае
резонанс обусловлен равенством групповой скорости волны со скоростью некоторого слоя
жидкости. В результате может происходить захват волнового пакета в окрестности резонанса.
Алгебраический метод исследования волн в сдвиговых потоках опирается на кусочно-линейную
аппроксимацию профиля скорости, однако этот метод непригоден для анализа резонансных
особенностей. Для исследования волн в потоке с непрерывным профилем скорости можно
использовать прямое численное моделирование или приближенные асимптотические методы:
205
Проблемы прикладной гидрофизики
метод ВКБ, метод эталонных уравнений, метод сращивания асимптотических разложений.
Может быть также полезна плазменно-гидродинамическая аналогия, дающая инструмент
физического понимания резонансных процессов. Для исследования динамики ВГВ
фундаментальную роль играет число Ричардсона Ri. При значении числа Ri>1/4 в окрестности
критического слоя волновой пакет при уменьшении длины волны бесконечно долго
приближается к критической точке. В ряде работ рассматривалась возможность резонансного
усиления ВГВ, используя модельные представления профилей сдвиговых скоростей или прямое
численное моделирование. В общем виде получить общий критерий усиления амплитуды ВГВ в
окрестности критического уровня, то есть выразить его непосредственно через параметры
потока, не представляется возможным, однако для некоторых модельных течений возможно
получить аналитическое представление такого критерия [1−3].
В настоящей работе рассмотрены постановки задач волновой динамики ВГВ в
стратифицированной среде с горизонтальными сдвиговыми течениями, в которых могут
возникать критические уровни. Линейные ВГВ описываются в приближении Буссинеска
уравнением [2, 3]
𝐷𝐷 2
𝜕𝜕2
𝐷𝐷 𝑑𝑑 2 𝑈𝑈 𝜕𝜕𝜕𝜕
𝑑𝑑 2 𝑉𝑉 𝜕𝜕𝜕𝜕
(𝛥𝛥
+
)𝑊𝑊
−
(
+
) + 𝑁𝑁 2 (𝑧𝑧)𝛥𝛥𝛥𝛥 = 0;
2
2
2
𝐷𝐷𝑡𝑡
𝜕𝜕𝑧𝑧
𝐷𝐷𝐷𝐷 𝑑𝑑𝑧𝑧 𝜕𝜕𝜕𝜕
𝑑𝑑𝑧𝑧 2 𝜕𝜕𝜕𝜕
𝜕𝜕2
𝜕𝜕2
𝛥𝛥 = 𝜕𝜕𝑥𝑥 2 + 𝜕𝜕𝑦𝑦2 ,
𝐷𝐷
𝜕𝜕
𝜕𝜕
𝜕𝜕
= + 𝑈𝑈(𝑧𝑧) + 𝑉𝑉(𝑧𝑧) ,
𝐷𝐷𝐷𝐷
𝜕𝜕𝜕𝜕
𝜕𝜕𝜕𝜕
𝜕𝜕𝜕𝜕
где (𝑈𝑈(𝑧𝑧), 𝑉𝑉(𝑧𝑧)) — компоненты скорости сдвигового течения на горизонте 𝑧𝑧; 𝑁𝑁 2 (𝑧𝑧) — квадрат
частоты Брента-Вяйсяля (частоты плавучести); 𝑊𝑊 — вертикальная компонента скорости ВГВ.
Это уравнение рассматривается в конечном слое −𝐻𝐻 < 𝑧𝑧 < 0. На дне 𝑧𝑧 = −𝐻𝐻 вертикальная
компонента скорости равна нулю, на поверхности 𝑧𝑧 = 0 используется приближение «твердой
крышки», отфильтровывающее поверхностные волны, и мало влияющее на основные
характеристики внутренних волн. В океане ВГВ могут обмениваться энергией со средними
течениями: если вертикальный градиент скорости течений велик, то средние течения могут
отдавать энергию волнам, то есть соответствующие колебания могут быть неустойчивыми.
Известно условие Майлса-Ховарда, при выполнении которого не существует неустойчивых
1
собственных
волн,
имеющее
вид:
𝑅𝑅𝑅𝑅(𝑧𝑧) ≥ ,
𝑅𝑅𝑅𝑅(𝑧𝑧) = 𝑁𝑁 2 (𝑧𝑧)/(𝑈𝑈 ′ (𝑧𝑧))2 + (𝑉𝑉 ′ (𝑧𝑧)2 ).
4
Рассматривается среднее течение (𝑈𝑈(𝑧𝑧) ≠ 0, 𝑉𝑉(𝑧𝑧) = 0). Для ВГВ с гармонической зависимостью
от времени и горизонтальных координат 𝑊𝑊(𝑡𝑡, 𝑥𝑥, 𝑦𝑦, 𝑧𝑧) = 𝑒𝑒𝑒𝑒𝑒𝑒( 𝑖𝑖(𝜔𝜔𝜔𝜔 − 𝑘𝑘𝑘𝑘))𝑤𝑤(𝑧𝑧), где за ось 𝑥𝑥
принято направление распространения волны, на некотором горизонте 𝑧𝑧 = 𝑍𝑍, для которого 𝑥𝑥 —
компонента скорости течений 𝑈𝑈(𝑧𝑧) совпадает с фазовой скоростью 𝐶𝐶 = 𝜔𝜔/𝑘𝑘 , происходит
поглощение волновой энергии, то есть передача части энергии волны средним течениям. Тогда
уровень 𝑧𝑧 = 𝑍𝑍 называется критическим уровнем. Поведение коротковолновых пакетов ВГВ,
приближающихся к критическому уровню, обычно рассматривается в ВКБ-приближении при
предположении, что 𝑈𝑈(𝑧𝑧) и 𝑁𝑁 2 (𝑧𝑧) медленно меняются на периоде осцилляций рассматриваемого
волнового поля. Однако вопрос о том, в каких именно физических задачах могут возникать такие
пакеты, как правило, не рассматривается. При этом наиболее интересным является вопрос о том,
как быстро устанавливается предельное решение, то есть какова в действительности ширина
переходной зоны, описываемая некоторой функцией 𝐴𝐴(𝜀𝜀), и как размер зоны зависит от
параметров задачи: волнового числа и локального числа Ричардсона. Качественный характер
выхода поведения решений на предельные при наличие критического уровня можно представить
следующим образом. Функция 𝑊𝑊(𝑡𝑡, 𝑥𝑥, 𝑧𝑧)) 𝑒𝑒𝑒𝑒𝑒𝑒( − 𝑖𝑖(𝜔𝜔𝜔𝜔 − 𝑘𝑘𝑘𝑘)) вне переходной зоны совпадает с
𝑈𝑈(𝑧𝑧). Внутри переходной зоны должен происходить плавный переход с одной ветви функции
𝑈𝑈(𝑧𝑧) на другую. При увеличении 𝑡𝑡 ширина переходной зоны уменьшается, но качественной вид
переходной зоны, как функции от переменной 𝑡𝑡(𝑧𝑧 − 𝑍𝑍) не должен меняться. Для произвольных
распределений частоты плавучести и сдвиговых течений, удовлетворяющих условиям МайлсаХоварда и естественным условиям регулярности для построения решений необходимо
206
Проблемы прикладной гидрофизики
использовать специальные асимптотические методы [3].
В работе рассмотрены и решены задачи динамики линейных внутренних гравитационных
волн в стратифицированных средах с горизонтальными сдвиговыми течениями при критических
режимах генерации. При распространении ВГВ в стратифицированных сдвиговых потоках
ключевую роль играют механизмы их усиления и поглощения при взаимодействии с течениями.
Рассмотрена постановка задачи о потоке стратифицированной среды, набегающим на
препятствие, за которым могут возникать уходящие волны, при этом особенность на
критическом уровне формируется вдали от препятствия. Изучены аналитические свойства
решений вблизи критических уровней. Построены асимптотики решений вблизи критического
уровня, которые выражаются через неполную гамма-функцию, и для реальных
океанологических параметров приведены оценки ширины критического слоя, в котором
происходит энергообмен между течениями и волновым пакетом. Предложенный в работе подход
предполагает выделение, детальное исследование и классификацию основных аналитических
моделей взаимодействия сдвиговых течений и волн, что дает возможность в дальнейшем
исследовать, в частности такие эффекты, как захват и усиление пакетов внутренних
гравитационных волн океаническими сдвиговыми течениям. Очевидно, что эффект заметного
увеличения амплитуды ВГВ стратифицированным потоком определяется глобальными
условиями, то есть зависит не только от деталей профиля потока в некоторой окрестности
критической точки, но и от свойств волнового поля, поведение которого определяется всем
течением. Поэтому существенного прояснения роли критического уровня в динамике
внутренних гравитационных волн с учетом реальной гидрологии океана можно ожидать в
дальнейшем только при построении нелинейной теории взаимодействия течений и волн.
Литература
1.Булатов В. В., Владимиров Ю. В. Волны в стратифицированных средах. М.: Наука, 2015.
2.Булатов В. В. Аналитические свойства функции Грина уравнения внутренних гравитационных
волн в стратифицированной среде со сдвиговыми течениями // ТМФ. 2022. Т. 211, № 2. С. 200−215.
3.Булатов В. В. Аналитические свойства решений уравнения внутренних гравитационных волн с
течениями для критических режимов волновой генерации // Тр. МИАН. 2023. Т. 322. С. 71−82.
Работа выполнена при финансовой поддержке РНФ проект 23-21-00194.
207
Проблемы прикладной гидрофизики
ТРАНСФОРМАЦИЯ ФРОНТА ВНУТРЕННИХ ВОЛН ПРИ ВЗАИМОДЕЙСТВИИ
С ДИНАМИЧЕСКИМИ СТРУКТУРАМИ МОРСКОЙ СРЕДЫ
В. В. Булатов1, д-р физ.-мат. наук, А. В. Медведева2, С. В. Станичный2, канд. физ.-мат. наук
1
Институт проблем механики им. А. Ю. Ишлинского РАН, Москва, Россия
2
Морской гидрофизический институт РАН, Севастополь, Россия
TRANSFORMATION OF THE INTERNAL WAVE FRONT DURING INTERACTION
WITH DYNAMIC STRUCTURES OF THE MARINE ENVIRONMENT
V. V. Bulatov1, Dr.Sc, A. V. Medvedeva2, S. V. Stanichny2, Ph.D.
1
Ishlinsky Institute for Problems in Mechanics of the RAS, Moscow, Russia
2
Marine Hydrophysical Institute of RAS, Sevastopol, Russia
На основе данных оптических сканеров высокого пространственного разрешения OLI, MSI, TM и
радиолокационных данных C-SAR проанализированы особенности трансформации фронта пакетов
внутренних волн при взаимодействии с динамическими структурами — фронтальными зонами,
субмезомасштабными вихрями, речными плюмами, движущимися ледовыми полями. Рассмотрены
конкретные ситуации таких взаимодействий в ряде морей, по последовательным спутниковым
изображениям оценены перепады фазовых скоростей на фронтальных зонах.
Based on data from high spatial resolution optical scanners OLI, MSI, TM and C-SAR radar data, the features of
the transformation of the front of internal wave packets when interacting with dynamic structures — frontal zones,
submesoscale eddies, river plumes, moving ice fields - are analyzed. Specific situations of such interactions in a
number of seas are considered, and differences in phase velocities in the frontal zones are estimated from
successive satellite images.
Генерация внутренних волн осуществляется из-за приливов [1], в бесприливных морях
может инициироваться взаимодействиями суб- и мезомасштабных процессов, геострофическими
течениями [2−4], а также процессами, связанными с развитием апвеллинга [5], речными
плюмами [6] и интенсивным метеорологическим воздействием [7; 8].
Для исследования ряда случаев проявления и трансформации пакетов внутренних волн
использовались спутниковые данные радиолокационного сенсора C-SAR (C-Band Synthetic
Aperture Radar) Sentinel-1 и оптических сенсоров высокого пространственного разрешения MSI
(Multi-Spectral Instrument) Sentinel-2, OLI (англ. Operational Land Imager) Landsat-8, -9 и TM
(Thematic Mapper) Landsat-5 за разные годы. Так как для вихревых структур, речных плюмов и
иных процессов одним из трассеров является взвешенное вещество, то анализировались данные
не только отраженного от поверхности сигнала, но и рассеянного. Для этого выполнялась
комбинация каналов оптических данных путем вычитания из канала с длиной волны,
соответствующей зеленому участку электромагнитного спектра, канала с длиной волны,
соответствующей ближнему инфракрасному диапазону. Наблюдение и оценка трансформации
пакетов внутренних волн реализовывалась на основе последовательных (квазисинхронных)
спутниковых изображений — то есть, сцен, на которых зафиксирован один и тот же район с
временным интервалом от десятков минут до часов. Получение значений фазовых скоростей
внутренних волн также осуществлялось с помощью сопоставления квазисинхронных
изображений. Анализ и обработка спутниковых данных выполнялись с помощью программного
обеспечения Sentinel Application Platform (SNAP), SeaDas и Google Earth Pro.
На спутниковых изображениях пакеты внутренних волн обнаруживаются за счет
чередования конвергентно-дивергентных зон и, соответственно, изменения шероховатости
поверхности. При наличии трассеров, таких как пленки, фитопланктон, льды или иные
плавающие объекты в конвергентно-дивергентных зонах происходит изменение их
концентрации. Также пакеты внутренних волн могут проявляться за счет модуляции глубины
рассеивающего слоя в зонах с высокой концентрацией гидрозолей. Типичное проявление пакета
на снимках — серия дугообразно изогнутых волн числом от 3−4 до 10−15 и более.
В действительности нередко встречаются ситуации, когда при взаимодействии с динамическими
структурами в поверхностном слое скорость волн в пределах пакета неоднородна, и его
«идеальная» геометрическая «форма» видоизменяется.
208
Проблемы прикладной гидрофизики
а
б
Рис. 1. Трансформация пакета внутренних волн в море Альборан
из-за влияния антициклонического вихря
а — фазовые скорости в разных частях пакета внутренних волн, полученные по квазисинхронным изображениям
MSI Sentinel-2 и OLI Landsat-8 от 04.01.2018 г., положение треков отмечено точками (1 — 1,61 м/с, 2 — 1,27 м/с,
3 — 0,89 м/с); б — антициклонический вихрь на изображении MSI Sentinel-2 от 04.01.2018 г.
Так, например, трансформация внутренних волн обнаруживается при прохождении через
вихревые структуры, и такие случаи выявляются в различных акваториях мира. Интенсивность
трансформации внутренних волн при прохождении через вихрь зависит от фазовой скорости
пакета, орбитальной скорости вихря, линейной скорости вихря, скорости и направления течений
вне вихря. При направлении движения волн, совпадающим с направлением орбитального
движения вихря, наблюдаемая скорость пакета (или его части) возрастает. Напротив, при
противоположном направлении фазовая скорость в пакете (или его части) снижается. Такую
ситуацию хорошо иллюстрирует развитие внутренней волны на выходе из Гибралтарского
пролива при существовании антициклонического вихря в море Альборан. Имея диаметр около
100 и более километров, вихрь способствует ускорению северной части пакета внутренних волн
и, напротив, замедляет движение южной части (рис. 1 а, б).
Сочетание пространственного положения вихревой структуры и направления, проходящей
через нее внутренней волны, дают разнообразие вариантов трансформации пакета, фиксируемой
спутниковыми сенсорами. Так, как указано выше, скорость части пакета может возрастать или
замедляться (а другой — не меняться), или же изменение скоростей может наблюдаться в двух
частях пакета. Также может регистрироваться прохождение внутренней волны не через
отдельный вихрь, а через значительную часть вихревого диполя, и в таком случае возможно
изменение скорости центральной части пакета, тогда как скорость краевых не меняется или
отличается от скорости центральной. В отдельных случаях влияние орбитальной скорости вихря
столь выражено, что пакет внутренней волны в значительной степени вовлекается в его
движение.
Схожие механизмы обнаруживаются при взаимодействии внутренних волн с иными
динамическими структурами — фронтами, плюмами, течениями и др. Эпизодически
регистрируется, когда однонаправленные скорости потоков на фронте и вне его существенно
различаются или же течения имеют противоположную направленность, трансформация пакета
внутренних волн может приводить к его разрыву и формированию двух пакетов с разными
скоростями.
209
Проблемы прикладной гидрофизики
Литература
1. Bondur V. G., Sabinin K. D., Grebenyuk Y. V. Generation of inertia-gravity waves on the island shelf //
Izvestiya «Atmospheric and Oceanic Physics». 2015. Vol. 51, № 2. P. 208−213.
2. Khimchenko E., Ostrovskii A., Klyuvitkin A., Piterbarg L. Seasonal Variability of Near-Inertial Internal
Waves in the Deep Central Part of the Black Sea. // Journal of Marine Science and Engineering. 2022. Vol. 10(5).
P. 557−563.
3. Mityagina M. I., Lavrova O. Y., Karimova S. S. Multi-sensor survey of seasonal variability in coastal
eddy and internal wave signatures in the north-eastern Black Sea // International Journal of Remote Sensing. 2010.
Vol. 31(17−18). P. 4779−4790.
4. Лаврова О. Ю., Митягина М. И., Сабинин К. Д. Возможные механизмы генерации внутренних
волн в северо-восточной части Черного моря. // Современные проблемы дистанционного зондирования
Земли из космоса. 2008. Т. 2, № 5. С. 128−132.
5. Митягина М. И., Лаврова О. Ю. Спутниковые наблюдения поверхностных проявлений
внутренних волн в морях без приливов. // Современные проблемы дистанционного зондирования Земли
из космоса. 2010. Т. 7, № 1. С. 260−272.
6. Nash J. D., Moum J. N. River plumes as a source of large-amplitude internal waves in the coastal ocean.
// Nature. 2005. Vol. 437(7057). P. 400−403.
7. Серебряный А. Н., Иванов В. А. Исследования внутренних волн в Черном море с
океанографической платформы МГИ. // Фундаментальная и прикладная гидрофизика. 2013. Т. 6, № 3.
С. 34−45.
8. Bondur V. G., Serebryany A. N., Zamshin V. V., Tarasov L. L., Khimchenko E. Intensive internal waves
with anomalous heights in the Black Sea shelf area // Izvestiya, Atmospheric and Oceanic Physics. 2019. Vol. 55.
P. 99−109.
Работа выполнена при финансовой поддержке гранта РНФ №23-21-00194 «Аналитические методы
математического моделирования волновой динамики неоднородных гидрофизических сред».
210
Проблемы прикладной гидрофизики
ХАРАКТЕРИСТИКИ ПРОЯВЛЕНИЙ КОРОТКОПЕРИОДНЫХ ВНУТРЕННИХ ВОЛН
КУРИЛО-КАМЧАТСКОГО РЕГИОНА ПО ДАННЫМ СПУТНИКОВЫХ
НАБЛЮДЕНИЙ ЗА ЗИМНИЕ И ОСЕННИЕ СЕЗОНЫ
А. Д. Маховиков1,2, А. В. Зимин1,2, д-р геогр. наук
1
Институт океанологии им. П. П. Ширшова РАН, Mocквa, Россия
2
СПб государственный университет, Санкт-Петербург, Россия
CHARACTERISTICS OF MANIFESTATIONS OF SHORT-PERIOD INTERNAL WAVES
IN THE KURIL-KAMCHATSK REGION ACCORDING TO SATELLITE
OBSERVATIONS FOR THE WINTER AND AUTUMN SEASONS
A. D. Makhovikov1,2, A. V. Zimin1,2, Dr.Sc.
1
Shirshov Institute of Oceanology, RAS, Moscow, Russia
2
St. Petersburg State University, St. Petersburg, Russia
Анализируется пространственная и временная изменчивость характеристик поверхностных проявлений
короткопериодных внутренних волн на акватории тихоокеанского шельфа Курило-Камчатского региона,
полученные по результатам анализа спутниковых изображений радиолокатора Sentinel-1 за зимние
2016/2017, 2017/2018 гг. и осенние 2017 и 2018 гг. сезоны. На 318 спутниковых снимках обнаружено 168
проявлений пакетов внутренних волн, содержащих от 4 до 30 волн в пакете. Длины волн внутри пакета
варьировали от 40 до 1840 метров, при среднем значении в 370 метров. Выявлены районы постоянной
встречаемости проявлений внутренних волн: бухта Вестник, а также район около островов Парамушир
и Онекотан.
The spatial and temporal variability of the characteristics of surface manifestations of short-period internal waves
in the waters of the Pacific shelf of the Kuril-Kamchatka region, obtained from the analysis of satellite images of
the Sentinel-1 radar for the autumn and winter seasons 2017−2018, is analyzed. 168 manifestations of internal
wave packets containing from 4 to 30 waves per packet were detected on 318 satellite images. The wavelengths
inside the packet ranged from 40 to 1840 meters, with an average value of 370 meters. Areas of constant
occurrence of manifestations of internal waves have been identified: Vestnik Bay, between the islands of
Paramushir and Onekotan.
Короткопериодные внутренние волны (КВВ) с длинами порядка сотен метров и с
частотами много меньше инерционной широко распространены на акватории Тихого океана,
прилегающей к полуострову Камчатка и северным Курильским островам. Этому способствует
сложный рельеф дна с узким шельфом и крутым материковым склоном, а также выраженная
приливная динамика [1]. КВВ регистрируются как по данным контактных и спутниковых
наблюдений [2−5]. При этом считается [5], что доминирующим механизмом генерации КВВ
является дезинтеграция внутренних приливных волн. Однако ещё не сформированы
представления о межгодовых особенностях изменчивости поля КВВ у берегов Камчатского
полуострова. Поэтому цель данной работы — заполнить пробелы в области изучения
пространственно-временной изменчивости характеристик КВВ в осенний и зимний сезоны на
акваториях Тихого океана, прилегающих к Курило-Камчатского региону на основе анализа
радиолокационных изображений.
Проявления КВВ регистрировались на радиолокационных изображениях (РЛИ) со
спутника Sentinel 1 (А и В) в C-диапазоне и в режиме съёмки IW с пространственным
разрешением 20 метров и шириной полосы обзора 250 км. Спутниковые снимки были загружены
с сайта Alaska Satellite Facility (https://search.asf.alaska.edu/#/). Анализировались данные за два
зимних (2016/2017, 2017/2018 гг.) и два осенних (2017 и 2018 гг.) сезона (таб. 1).
Количество обработанных снимков за рассматриваемые сезоны
Временной промежуток
декабрь 2016 – февраль 2017
сентябрь-ноябрь 2017
декабрь 2017 – февраль 2018
сентябрь-ноябрь 2018
Таблица 1
Количество обработанных снимков
32
93
94
99
211
Проблемы прикладной гидрофизики
Рис. 1. Карта покрытия РЛИ акватории за рассматриваемый период, граница региона обозначена
красной пунктирной линией (А) и пример поверхностного проявления КВВ (Б)
Рис. 2. Карта пространственного положения лидирующих гребней проявлений КВВ за зиму 2016/2017
г (А); осень 2017г (Б), зиму 2017/2018г (В), осень 2018г (Г)
Распределение количества РЛИ по акватории исследуемого региона показано на рис. 1, а.
Из рис. 1, а видно, что наибольшая обеспеченность спутниковыми данными (около 50 РЛИ)
характерна для прибрежной акватории Камчатки и Четвертого Курильского пролива.
Снимки обрабатывались в программном обеспечении Sentinel Application Platform (SNAP)
[6]. Поверхностные проявления КВВ регистрировались на РЛИ в виде чередующихся полос
усиления и ослабления радиолокационного сигнала (см. рис. 1, б) соответствующих волновому
пакету. Оценивалось количество волн в пакете, длина лидирующего гребня, расстояние между
гребнями волн одного пакета и направление распространения.
212
Проблемы прикладной гидрофизики
Всего за данный период было обнаружено только 183 проявлений пакетов КВВ (таб. 2).
Пространственное распределение лидирующих гребней проявлений пакетов КВВ
показано на рис. 2. Проявления КВВ регистрировались практически повсеместно над шельфом,
материковым склоном, а также над глубоководной частью Авачинского залива (рис. 1, «AV»).
Осенью регистрируется в 8−10 раз больше проявлений КВВ, чем зимой в оба года. Подавляющее
большинство проявлений КВВ сконцентрировано в шельфовой зоне и над материковым склоном
и лишь минимальное число проявлений регистрируется в открытом океане над большими
глубинами. Обобщая данные, можно выделить два очага частой встречаемости КВВ — в районе
островов Парамушир (рис. 1, «P») и Онекотан (рис. 1, «O») и возле берегов Камчатки у бухты
Вестник (рис. 1, «V»).
Количество обработанных снимков за рассматриваемые сезоны
Временной промежуток
декабрь 2016 – февраль 2017
сентябрь-ноябрь 2017
декабрь 2017 – февраль 2018
сентябрь-ноябрь 2018
Таблица 2
Количество обработанных снимков
13
71
4
95
Согласно статистике получившихся результатов в зимнее время среднее количество волн
в одном пакете составляет около 12 шт., среднее расстояние между волнами одной группы —
0,4 км, длина лидирующего гребня — около 55 км, направление распространения — юго-восток
(ЮВ). В осеннее время среднее количество волн в одном пакете и среднее расстояние между
гребнями оказались меньше и составили около 4 шт. и около 0,25 км. Средняя длина
лидирующего гребня снизилась почти в 2 раза и составила около 32 км. Среднее направление
распространения в осенний сезон — южное (Ю).
Количество волн в одном пакете за рассматриваемые сезоны
Временной промежуток
декабрь 2016 – февраль 2017
сентябрь-ноябрь 2017
декабрь 2017 – февраль 2018
сентябрь-ноябрь 2018
Минимальное
значение количества
волн в одном пакете
(шт.)
12
4
13
4
Среднее значение
количества волн в
одном пакете (шт.)
19
17
16
17
Таблица 3
Максимальное
значение
количества волн в
одном пакете (шт.)
29
30
21
30
Изменчивость количества волн в одном пакете за рассматриваемые сезоны показало, что в
осенью могут детектироваться пакеты волн с меньшим количеством гребней, в то время как
зимой минимальное значение составляет 12−13 шт. (таб. 3). Анализ длин волн в пакете
показывает, что в зимние сезоны наблюдаются схожие с осенними длины волн от 40 м до 1840 м.
Изменчивость длин лидирующего гребня (длина поверхностного проявления лидирующей волны
в пакете на спутниковом снимке) показывает, что в зимний период наиболее распространены
пакеты волн с длиной лидирующего гребня от 19 до 106 км, в то время как в осенние сезоны —
от 3 до 147 км. Малое количество проявлений КВВ на РЛИ в зимний период может быть связано
с заглублением пикноклина, а также усилением приводного ветра, влияющими на отображение
волн на морской поверхности. Однако надежно подтвердить полученные выводы могут только
результаты специальных in-situ наблюдений, выполненные в выделенных в работе районах.
В данной работе показано, что в зимние сезоны количество проявления волн снижается и
значительно варьирует не только от сезона к сезону, но и от года к году.
В выделенных «горячих точках» (в районе островов Парамушир и Онекотан (49,67°N,
155,87°E); бухта Вестник (50,61°N, 157,19°E)) частота встречаемости проявлений КВВ остаётся
213
Проблемы прикладной гидрофизики
относительно высокой, что может подтверждать версию о наличии постоянного источника их
генерации.
Литература
1. Богданов К. Т., Мороз В. В. Структура, динамика и гидролого-акустические характеристики вод
проливов Курильской гряды. Владивосток: Дальнаука, 2000. 152 с.
2. Епифанова А. С., Рыбин, А. В., Моисеенко Т. Е., Куркина О. Е., Куркин А. А., Тюгин Д. Ю. База
данных наблюдений внутренних волн в Мировом океане // Морской гидрофизический журнал. 2019. Т. 35,
№ 4. С. 395–403.
3. Свергун Е. И., Зимин А. В. Характеристики короткопериодных внутренних волн Авачинского
залива по данным экспедиционных и спутниковых наблюдений, выполненных в августе – сентябре 2018
года // Морской гидрофизический журнал. 2020. Т. 36, № 3. С. 300–312. DOI:10.22449/0233-7584-2020-3300-312.
4. Jackson C. R. An Atlas of Internal Solitary-like Waves and their Properties. Second Edition. 2004. URL:
https://www.internalwaveatlas.com/Atlas2_index.html.
5. Svergun E. I., Sofina E. V., Zimin A. V., Kruglova K. A. Seasonal variability of characteristics of
nonlinear internal waves in the Kuril-Kamchatka region by Sentinel 1 data // Continental Shelf Research. 2023.
Vol. 259. Р. 104986. https://doi.org/10.1016/j.csr.2023.104986.
6. European Space Agency SNAP. URL: https://step.esa.int/main/download/snap-download/.
Работа выполнена в рамках государственного задания №FMWE-2024-0028.
214
Проблемы прикладной гидрофизики
СПОСОБ АДАПТИВНОЙ ОБРАБОТКИ И ОТОБРАЖЕНИЯ ЗРИТЕЛЬНОМУ
АНАЛИЗАТОРУ ОПЕРАТОРА ГИДРОФИЗИЧЕСКОЙ ИНФОРМАЦИИ
О ЕСТЕСТВЕННЫХ ВНУТРЕННИХ ВОЛНАХ
В. В. Иванов
СПб филиал Института земного магнетизма, ионосферы и распространения радиоволн им. Н. В. Пушкова
Российской Академии Наук, Санкт-Петербург. Россия
A METHOD FOR ADAPTIVE PROCESSING AND DISPLAY OF HYDROPHYSICAL
INFORMATION ABOUT NATURAL INTERNAL WAVES TO THE OPERATOR'S
VISUAL ANALYZER
V. V. Ivanov
St. Petersburg Branch of the Pushkov Institute of Terrestrial Magnetism, Ionosphere and Radiowave Propagation
of the Russian Academy of Sciences. St. Petersburg. Russia
Аннотация: Показано, что решение задачи обнаружения естественных внутренних волн, маскируемых
естественным фоном, требует использования интеллектуальных возможностей оператора
(зрительного анализатора, как более эффективного) и решения задачи оптимального, по критерию
максимума эффективности, взаимодействия между оператором и трактами адаптивной обработки
информации о естественных внутренних волнах. Разработан способ обнаружения и отображения
зрительному анализатору оператора гидрофизической информации о естественных внутренних волнах.
Abstract: It is shown that solving the problem of detecting natural internal waves masked by a natural background
requires the use of the intellectual capabilities of the operator (visual analyzer, as more effective) and solving the
problem of optimal, according to the criterion of maximum efficiency, interaction between the operator and
adaptive information processing paths about natural internal waves. A method has been developed for detecting
and displaying hydrophysical information about natural internal waves to the operator's visual analyzer.
Используемые математические методы, реализующие энергетическое («пороговое»)
правило принятия решения, не обеспечивают возможность эффективного обнаружения в слое
жидкости, располагаемом ниже скачка плотности, следов естественных внутренних волн (ЕВВ),
маскируемых естественным невозмущённым гидрофизическим полем (ГФП).
Актуальность работы определялась необходимостью поиска направлений использования
интеллектуальных возможностей оператора, обеспечивающих в условиях естественных
ограничений синтез оптимальных, — с точки зрения принятия решения об обнаружении слабых
сигналов, — способов и средств обработки и отображения гидрофизической информации (ГФИ)
с учётом информативных и отличительных признаков естественных внутренних волн.
Такая задача могла быть выполнена только при условии решения проблемы оптимального
взаимодействия между оператором и трактами обработки системы по критерию максимума
эффективности, который обеспечивается при сохранении адекватности информационных
потоков в трактах первичной обработки информации, средствах отображения и сенсорном
анализаторе оператора, что требует измерения модуляционной передаточной функции (МПФ)
зрительного анализатора.
Такие измерения выполнены в работе [1] путём подачи на вход системы (рис. 1, а) ряда
изображений чередующихся тёмных и светлых (или чёрных и белых) полос в виде
прямоугольной решётки, яркость которой распределена вдоль оси Х по закону, определяемому
знаком sin(2πωx). Полосы отличаются друг от друга по пространственной частоте. На выходе
формируется изображение с коэффициентом модуляции (контрастом) отличным от входного
сигнала (рис. 1, б).
Совокупность этих значений для разных пространственных частот и составляет
пространственную МПФ системы. Из графика, приведённого в работе [1], характеризующего
минимум коэффициента модуляции (контраста решётки), необходимого для обнаружения той
или иной пространственной частоты, видно, что максимальная чувствительность зрительной
системы наблюдается в области средних пространственных частот — ω = 1−10 цикл/град.
215
Проблемы прикладной гидрофизики
Рис. 1. Вид сигналов, подаваемых на вход системы измерения модуляционной
передаточной функции зрительного анализатора оператора
Рис. 2. Иллюстрация способа адаптивной обработки и отображения
гидрофизической информации о естественных внутренних волнах
Сформулированы требования по отображению зрительному анализатору оператора
информации в виде квазипериодических более широких полос, характеризующих информацию
о ЕВВ, на фоне более узких «фоновых» полос, распределённых по случайному закону:
1. Яркость экрана дисплея в пределах 10−30 кд/м2 (30 кд/м2 — адаптационный уровень,
при превышении которого острота зрения изменяется незначительно). Угловой размер экрана
10−15°, что соответствует, при размерах экрана 250 мм (по горизонтали) на 200 мм (по
вертикали), — расстоянию 1200−1000 мм от глаз наблюдателя. Ориентация решётки —
вертикальная. Данные параметры обеспечивают максимум чувствительности при
пространственной частоте квазипериодических полос-сигналов 4−2 цикл/град.
2. Для реализации эффекта снижения чувствительности к восприятию оператором
«фоновых» полос и повышения за счёт этого относительной чувствительности зрительной
системы при восприятии квазипериодических полос-сигналов, их пространственная частота
должна быть более 4 цикл/град и лежать в пределах 1,5±0,5 октавы, то есть, исходя из известного
выражения: log2(f2/f1) = 1,5±0,5, где f2/f1 = 4−2 цикл/град, — составлять 16−4 цикл/град.
Способ адаптивной обработки и отображения ГФИ, включающий выполнение
предварительной обработки с целью получения функции изменения мощности текущей ГФИ в
диапазоне частот 0,0−0,1 Гц [2] заключается в рис. 2.
1. Определяем частоту дискретизации (тактовых сигналов) и амплитуду дискретных
импульсов, при которых обеспечивается наибольшая контрастность полос-сигналов по
сравнению с промежуточными — «фоновыми» полосами.
2. Формируем последовательность двоичных уровней s(t) определённой в п. 1 амплитуды
в тактовых промежутках времени.
216
Проблемы прикладной гидрофизики
Рис. 3. Последовательность дискретных импульсов в виде чёрных
и белых полос, предъявляемая оператору
3. Последовательность двоичных уровней преобразуем в аппроксимирующую
функцию g(t).
4. Аппроксимирующую функцию сравниваем с входным аналоговым сигналом f(t),
характеризующим процесс в целом, и формируем сигнал ошибки в виде разности между
функциями сигнала и аппроксимации, который представляем, в зависимости от знака разности,
одним из возможных уровней квантования h(t).
5. Формируем код анализируемого сигнала (серию дискретных импульсов L(t)),
представляющий собой последовательность бинарных импульсов.
6. Воспроизводим дискретные импульсы в виде чёрных и белых вертикально
ориентированных полос на экране дисплея, которые и предъявляем оператору (рис. 3).
На экране дисплея зрительный анализатор оператора воспринимает группу из пяти
квазипериодических широких полос-сигналов на фоне более узких полос (рис. 3), как
информацию о естественных внутренних волнах.
Результаты работы позволяют говорить о том, что интеллектуальные возможности
оператора могут включать не только использование зрительного анализатора, но и дополнены
использованием слуховой, тактильной сенсорными системами при решении задачи адаптивной
обработки и отображения как гидрофизической, так и иной информации, исследуемой в других
областях науки, где решается задача обнаружения слабых сигналов на фоне сильных помех
(отношение сигнал/помеха ≤1).
Литература
1. Шелепин Ю. Е. и др. Визоконтрастометрия: Измерения пространственных передаточных
функций зрительной системы. Л.: Наука, 1985. 103 с.
2. Лайтхилл Д. Волны в жидкостях / Пер. с англ. М.: Изд. Мир, 1981. 598 с.
217
Проблемы прикладной гидрофизики
СТАТИСТИЧЕСКИЙ АНАЛИЗ ПОВЕРХНОСТНЫХ ПРОЯВЛЕНИЙ
ВИХРЕВЫХ СТРУКТУР В АВАЧИНСКОМ ЗАЛИВЕ ТИХОГО ОКЕАНА
ПО СПУТНИКОВЫМ ДАННЫМ
А. В. Зимин, д-р геогр. наук, А. А. Коник, канд. геогр. наук, О. А. Атаджанова, канд. геогр. наук
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
STATISTICAL ANALYSIS OF SURFACE MANIFESTATIONS
OF EDDIES STRUCTURES IN THE AVACHA BAY OF THE PACIFIC OCEAN
BASED ON SATELLITE DATA
A. V. Zimin, Dr.Sc., A. A. Konik, Ph.D., O. A. Atadzhanova, Ph.D.
Shirshov Institute of Oceanology, RAS, Moscow, Russia
Работа посвящена исследованию пространственно-временного распределения поверхностных проявлений
мезомасштабных и субмезомасштабных вихревых структур в Авачинском заливе Тихого океана,
детектируемых на основе спутниковой альтиметрии и радиолокации с марта по август 2015−2021 гг.
Всего было детектировано 29 мезомасштабных и 111 субмезомасштабных проявлений вихревых
структур. Мезомасштабные вихри имели антициклонический тип вращения и средний диаметр 50 км,
субмезомасштабные — преимущественно циклонический и диаметром 3,5 км. Мезомасштабные вихри в
большей мере отмечались в глубоководной восточной части залива, а субмезомасштабные — в близи
берега на шельфе. Установлено, что группы малых вихревых структур на периферии более крупных
антициклонических образований регистрируются преимущественно в период сизигийных приливов.
The study is dedicated to the investigation of the spatial-temporal distribution of surface manifestations of
mesoscale and submesoscale eddies structures in the Avacha Bay of the Pacific Ocean, detected based on satellite
altimetry and radar data from March to August 2015−2021. A total of 29 mesoscale and 111 submesoscale eddy
structures were detected. The mesoscale eddies exhibited anticyclonic rotation and had an average diameter of
50 km, while the submesoscale eddies were predominantly cyclonic and had a diameter of 3,5 km. The mesoscale
eddies were predominantly observed in the deep-water eastern part of the bay, while the submesoscale eddies
were found near the coast on the shelf. It was also demonstrated that groups of small eddies structures on the
periphery of larger anticyclonic formations were mainly observed during spring tides.
Авачинский залив в весенний и летний период являются районами интенсивного
икрометания и широкого распространения ранних стадий развития минтая [1]. Предполагается,
что абиотические факторы оказывают значительное влияние на распределение икры и
ихтиопланктона и, как следствие, их выживаемость. Исследование локальных динамических
факторов среды является одной из приоритетных задач по выяснению механизмов, влияющих на
формирование урожайности поколений минтая.
Рельеф дна в Авачинском заливе характеризуется узким шельфом и крутым материковым
склоном с хорошо выраженными каньонами. Существенное влияние на изменчивость
гидрологической структуры вод оказывают холодное Восточно-Камчатское течение и связанные
с ним мезомасштабные вихревые структуры, которые хорошо детектируются по данным
спутниковых альтиметров [2]. Сведения же о малых (субмезомасштабных) вихрях в районе носят
крайне отрывочный характер. В тоже время субмезомасштабные (с масштабом порядка единиц
километров) и мезомасштабные (с масштабом порядка десятков километров) вихри, благодаря
значительным вертикальным скоростям, сопоставимыми со скоростями в апвеллингах, играют
роль в горизонтальном и вертикальном переносе тепла и веществ.
Цель работы — заполнить пробелы в области изучения пространственно-временной
изменчивости характеристик вихревых структур на акватории Авачинского залива Тихого
океана на основе данных с марта по август 2015−2021 гг.
В качестве исходных данных для регистрации поверхностных проявлений малых вихрей
использовались радиолокационные изображения (РЛИ) высокого разрешения Sentinel-1A/B за
март-август с 2015 по 2021 г. За весь период было проанализировано 375 снимков, среднее
покрытие акватории составляло 60 изображений. Вихри отмечались на РЛИ на основе метода,
представленного в [3]. Определялись следующие характеристики вихревых структур:
координаты центра, диаметр и тип вращения (циклонические, антициклонические). Анализ
218
Проблемы прикладной гидрофизики
мезомасштабных вихревых структур основывался на данных Mesoscale Eddy Trajectory Atlas
Product Meta3.2 DT (https://tds.aviso.altimetry.fr/thredds/L4/L4-EDDY.html), в котором
содержалась информация о типе вращения, положении центра, диаметре и геострофической
скорости структуры. Данные о приливных колебаниях в Авачинском заливе использовались из
глобального атласа TPXO9.
Всего на основе РЛИ было зарегистрировано 111 вихревых структур со средним
диаметром 3,5 км, 74 % из которых имели циклонический тип вращения. Средний диаметр
антициклонических структур составил 4,9 км, циклонических 3,1 км, что соответствует оценкам
бароклинного радиуса Россби для рассматриваемой акватории. На рис. 1 представлена
пространственная и сезонная изменчивость малых вихрей и их количество в теплый период года
для района исследования.
Большинство малых циклонических и антициклонических вихрей регистрируются вблизи
береговой зоны на шельфе Авачинского залива. Пик встречаемости проявлений приходится на
июнь, в период активного формирования приповерхностного пикноклина. Значительная часть
проявлений приурочена к зонам интенсивного нереста икры минтая в районе глубоководных
каньонов.
Мезомасштабные вихревые структуры регистрировались чаще всего по одиночке в виде
антициклонических вихрей. Среднее время нахождения вихря составляло 47 суток. Всего было
зарегистрировано 29 структур со средним диаметром около 50 км. Пространственная
изменчивость положений мезомасштабных вихрей в Авачинском заливе представлена на рис. 2.
а
б
Рис. 1. Характеристики малых вихревых структур в Авачинском заливе
за период с марта по август 2015−2021 гг.
а — положение циклонических (черный цвет) и антициклонических (серый цвет) вихревых структур, серые линии
обозначают изобаты от 100 до 1000 м; б — внутригодовая изменчивость субмезомасштабных вихрей в шт.
Рис. 2. Треки движения мезомасштабных вихрей (черные ломаные линии)
и зона нереста икры минтая (заштрихованная область), полученная по данным
ихтиопланктонных съемок, в Авачинском заливе за период с марта по август 2015–2021 гг.
219
Проблемы прикладной гидрофизики
а
б
Рис. 3. Изменчивость характеристик абсолютной динамической топографии
и прилива для Авачинского залива
а — карта абсолютной динамической топографии с положением малых вихрей (черные круги — циклоны,
серые — антициклоны) и точкой для данных прилива (черная звезда) для 26.06.2018 г.; б — изменчивость скорости
прилива за период с 11.06 по 10.07.2018 гг., красной линией обозначено время регистрации малых вихрей на РЛИ
Из рис. 2 видно, что большинство мезомасштабных структур отмечается в восточной части
залива и их основное направление смещения связано с Северо-Камчатским течением,
направленным на юг. При этом практически все вихри находятся на большом отдалении от
берега и лишь частично попадают в северо-восточную часть зоны интенсивного нереста икры
минтая.
Как показал совместный анализ альтиметрических, оптических и радиолокационных
изображений, на внешней границе крупных вихрей интенсивное трение разнонаправленных
потоков не раз формировало большое число субмезомасштабных вихрей. Пример такого
процесса представлен на рис. 3, где регистрируется мезомасштабный вихрь диаметром около
50 км, а на его периферии точками отмечены положения центров малых вихрей за те же сутки.
Стоит отметить, что такая ситуация в 70 % случаев складывалась в период сизигийного усиления
приливных течений. Таким образом, наиболее вероятным механизмом генерации
субмезомасштабных вихрей в Авачинском заливе является диссипация приливной энергии на
внешней границе высокоскоростных крупномасштабных вихрей. Отметим, что мезомасштабные
антициклонические вихри в бухтах Камчатки регистрируются весьма часто [2] и,
соответственно, генерация субмезомасштабных структур на их периферии за счёт сдвига
скорости под влиянием прилива может быть весьма распространённым процессом, влияющим
на особенности вертикального и горизонтально перераспределения икры и молоди минтая.
В результате на основе анализа альтиметрических и радиолокационных данных за
весенний и летний период 2015−2021 гг. была оценена изменчивость поверхностных проявлений
субмезомасштабных и мезомасштабных вихревых структур в важной в промысловом отношении
акватории Авачинского залива. Показано, что малые вихри в Авачинском заливе отмечались
преимущественно в районах сдвига горизонтальных скоростей течений и на внешней границе
мезомасштабных вихрей в период сизигийных приливов.
Литература
1. Буслов А. В., Тепнин О. Б., Дубинина А. Ю. Особенности экологии нереста и эмбриогенеза
восточнокамчатского минтая // Изв. ТИНРО. 2004. Т. 138. С. 282–298.
2. Prants S. V., Budyansky M. V., Lobanov V. B., Sergeev A. F., Uleysky M. Y. Observation and Lagrangian
analysis of quasi‐stationary Kamchatka trench eddies // Journal of Geophysical Research: Oceans. 2020. P. 1−25.
DOI:10.1029/2020jc016187.
3. Bashmachnikov I. L., Kozlov I. E., Petrenko L. A., Glok N. I., Wekerle C. Eddies in the North Greenland
Sea and Fram Strait from satellite altimetry, SAR and high‐resolution model data // Journal of Geophysical
Research: Oceans. 2020. Vol. 125. e2019JC015832. DOI:10.1029/2019JC015832.
Исследование выполнено за счёт гранта Российского научного фонда № 23-17-00174
(https://rscf.ru/project/23-17-00174/).
220
Проблемы прикладной гидрофизики
МЕЖГОДОВАЯ ИЗМЕНЧИВОСТЬ ХАРАКТЕРИСТИК ПРИКРОМОЧНОЙ
ФРОНТАЛЬНОЙ ЗОНЫ В СЕВЕРО-ВОСТОЧНОЙ ЧАСТИ ГРЕНЛАНДСКОГО МОРЯ
ПО ДАННЫМ РЕАНАЛИЗА И IN SITU НАБЛЮДЕНИЙ В ЗИМНИЙ ПЕРИОД
Т. М. Максимовская1,2,3, А. В. Зимин1,2,3, д-р геогр. наук
1
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
2
Санкт-Петербургский государственный университет, Санкт-Петербург, Россия
3
Мурманский морской биологический институт РАН, Мурманск, Россия
INTERANNUAL VARIABILITY OF THE CHARACTERISTICS OF THE MARGINAL
ICE ZONE IN THE NORTHEASTERN PART OF THE GREENLAND SEA BASED
ON REANALYSIS AND IN SITU OBSERVATIONS IN THE WINTER
T. M. Maksimovskaya1,23, A. V. Zimin1,2,3, Dr.Sc.
1
Shirshov Institute of Oceanology, RAS, Moscow, Russia
2
St. Petersburg State University, St. Petersburg, Russia
3
Murmansk Marine Biological Institute, RAS, Murmansk, Russia
В работе представлены результаты исследования характеристик Прикромочной фронтальной зоны
восточной части Гренландского моря по данным экспедиционных исследований и реанализа CMEMS
GLORYS12v1. Рассматривались зимние периоды 2019−2023 гг. Показана изменчивость температуры и
солёности вод и их градиентов на разрезах в водах атлантического и арктического происхождения,
выполнено сравнение данных наблюдений и реанализа. Сравнение результатов судовых наблюдений и
реанализа показали, что в последних отсутствуют наборы данных, достоверно описывающие
термохалинные характеристики вод арктического происхождения вблизи Прикромочной фронтальной
зоны в зимний период года.
The paper presents the results of a study of the characteristics of the Marginal Ice Zone of the eastern part of
the Greenland Sea according to the data of expeditionary research and reanalysis of CMEMS GLORYS12v1.
The winter periods of 2019−2023 are considered. The variability of temperature and salinity of waters and their
gradients in sections in waters of Atlantic and Arctic origin is shown, and the data of observations and reanalysis
are compared. Comparison of ship observations and reanalysis results showed that the latter lack datasets that
accurately describe the thermohaline characteristics of Arctic-origin waters near the Marginal Ice Zone during
the winter period.
В работе рассматривается северо-восточный район пролива Фрама, прилегающий к
шельфу арх. Шпицберген. Вдоль континентального склона архипелага проходит ЗападноШпицбергенское течение (ЗШТ), которое несет теплые и соленые воды атлантического
происхождения в арктический бассейн, погружаясь при продвижении на север [1]. В процессе
движения на север атлантические воды претерпевают изменения: они охлаждаются в результате
отдачи больших потоков тепла в атмосферу, а также трансформируются по мере смешения с
окружающими менее солеными и более холодными водами. На севере рассматриваемого района
под влиянием процессов взаимодействия океана и атмосферы формируются поверхностный слой
арктических вод и ледовый покров [2]. С востока из Баренцева моря происходит частичный
возврат трансформированных атлантических вод, а также вынос арктических вод и льдов с
Восточно-Шпицбергенским течением (ВШТ). Одной из особенностей района является
Прикромочная фронтальная зона (ПрФЗ), которая формируется в результате взаимодействия
относительно распресненных холодных арктических вод, образующихся в результате таяния
льда, и трансформированных атлантических вод в области, удаленной от кромки льда на
несколько десятков километров [3]. ПрФЗ определяется как переходная зона между открытым
морем и плотным дрейфующим льдом. Ширина этой зоны может составлять до 50 км. В качестве
границ принято считать область акватории, где от 15 % до 80 % поверхности моря покрыто
льдом [4].
Глобальные модели океана, дополненные системами реанализа, постоянно развиваются, а
результаты их работы выкладываются в открытый доступ [5]. Их часто используют при решении
различных задач, в том числе связанных с детектированием фронтальных зон [6], считая их
верифицированными. При этом сопоставление судовых и модельных данных для конкретного
региона представляется, как правило, второстепенной задачей, хотя результаты моделирования
221
Проблемы прикладной гидрофизики
дают только некоторую оценку полей температуры и солености. В связи с этим, появляется
необходимость анализа его возможности воспроизводить реальную изменчивость основных
термодинамических характеристик водной среды во фронтальной зоне.
В работе использовались данные СТД-зондирований, полученные в ходе экспедиций на
НИС «Дальние Зеленцы» в зимний период 2019, 2020, 2021 и 2023 гг. (рис. 1). Отметим, что лишь
в 2019 и 2023 гг. экспедициям удалось выполнить разрезы до ледовой кромки, и именно они были
использованы для детектирования характеристик фронтальной зоны. В эти годы станции на
гидрологических разрезах выполнялись с дискретностью 10 морских миль (18Ю5 км). Для
верификации привлекался массив данных из продукта CMEMS GLORYS12v1 с разрешением
1/12 градуса [7], что на рассматриваемых широтах составляет около 14 км. Использовались
данные в слое 0−40 м в даты проведения контактных измерений (6–7 ноября 2020 г., 23−25 ноября
2021 г., 4−5 декабря 2023 г.).
В 2020 г. разрез состоял всего из 4 точек, и тенденции температуры и солености на данном
разрезе по данным измерений и реанализа схожи. Так положение ядра вод из Конгс-фьорда
совпадает и в температуре между данными составила 0,34 °С, а функция расхождения 0,49.
Данные реанализа занижали значения температуры на трех остальных станциях в среднем на
градус. Для солености реанализ показал более близкий результат к данным зондирования. На
северной станции разница между средневзвешенными значениями составила 0,02 епс, здесь
наблюдалась высокая корреляция (R=0,9).
В 2021 г. разрез состоял из 9 станций, равномерно распределенных вдоль 8,5 °в.д. с шагом
10 морских миль. На этом разрезе, как и в 2020 г., не была охвачена измерениями
непосредственно ПрФЗ, лишь на самой северной станции (79°20’ с. ш.) по данным контактного
зондирования можно отметить охлаждающее влияние арктических вод, что не удалось
обнаружить по данным реанализа. Для этой станции средневзвешенное значение температуры,
полученной с помощью реанализа, превышало измеренное на 0,44 °С. Средние аномалии
варьировали от 0,1 до 1,1 °С, коэффициент корреляции имел высокие значения для большей части
станций разреза (R=0,7−0,94). Соответствие вычисленной и измеренной солености на разрезе
было более полным. Аномалии рядов не превышали 0,07 епс. При этом корреляция была слабой
(R<0,55). Также можно отметить наличие сдвига в проявлении различного рода интрузионных
включений либо их отсутствие при воспроизведении данных.
Самый полный разрез, доступный для сравнения с реанализом GLORYS12v1 и охвативший
ПрФЗ у ледовой кромки был получен в декабре 2023 г (рис. 2). Сопоставление данных CTDзондирования с данными реанализа на разрезе показало соответствие широтного распределения
температуры и солености. Прикромочная фронтальная зона, однако, не воспроизводит верно
данные измерений, имеет большую ширину, а также горизонтальное и вертикальное
распространение.
Рис. 1. Положение станций CTD-зондирования в северо-восточной части Гренландского моря
222
Проблемы прикладной гидрофизики
Рис. 2. Распределение температуры и солености на вертикальном разрезе 2023 г.
по данным наблюдений in situ (а, б) и реанализа GLORIS12v1 (в, г)
Корреляция между станциями на разрезе очень неоднородна. Коэффициент корреляции
здесь варьировал от 0,16 до 0,94. Разница между средневзвешенными значениями температуры
составляла от 0,03 до 2,82 °С, солености: 0,01–0,88 епс. Максимальное расхождение в значениях
при этом наблюдалось в прикромочной зоне, где арктические воды занимали больший объем по
модельным данным в сравнении с in situ.
Таким образом, можно отметить, что характеристики Прикромочной фронтальной зоны в
зимний период имеют значительную изменчивость, и при их описании еще рано полностью
опираться на данные глобальных океанографических моделей, несмотря на их охват и
регулярность обновления. Только комплексный подход с учетом всех форм доступных
гидрологических данных позволит получить достоверную информацию для оценки
изменчивости гидрологических условий в Прикромочной фронтальной зоне.
Литература
1. Johannessen O. M., Hibler III W. D., Wadhams P., Campbell W. J., Hasselman K., Dyer I., Dunbar M.
A science plan for a summer marginal ice zone experiment in the Fram Strait // Greenland Sea, CRREL Spec. Rep.
U.S. Army Cold Reg. Res. Eng. Lab. Hanover N. H., 1983. 83−12. Р. 47.
2. Шапкин Б. С., Рубченя А. В., Иванов Б. В., Ревина А. Д., Богрянцев М. В. Многолетние изменения
ледовитости в районе архипелагов Шпицберген и Земля Франца-Иосифа // Лёд и Снег. 2021. T. 61, № 1.
С. 128−136. DOI: 10.31857/S2076673421010076.
3. Родионов В. Б., Костяной А. Г. Океанические фронты морей Северо-Европейского бассейна. М.:
ГЕОС, 1998. 290 с.
4. Strong C., Foster D., Cherkaev E., Eisenman I., Golden K. On the definition of marginal ice zone width
// J. Atmos. Oceanic Technol. 2017. doi:10.1175/JTECH-D-16-0171.1.
5. Ocean Monitoring and Forecasting. Ocean Forecasts. URL: http://bulletin.mercator-ocean.fr/ (дата
обращения: 10.02.2024).
6. Ахтямова А. Ф., Травкин В. С. Исследование фронтальных зон Норвежского моря // Морской
гидрофизический журнал. 2023. Т. 39, № 1. С. 67–83. EDN IHBIQE. doi:10.29039/0233-7584-2023-1-67-83.
7. Quality information document for Global Sea Physical Analysis and Forecasting Product GLOBAL
ANALYSIS FORECAST PHY001024. URL: http://resources.marine.copernicus.eu/ documents/QUID/CMEMSGLOQUID‑001–024.pdf (дата обращения: 27.01.2020) (дата обращения: 26.01.2024).
Работа выполнена в рамках государственного задания по темам № FMWE-2024-0028 и FMEE-20240016.
223
Проблемы прикладной гидрофизики
НОВЫЕ СХЕМЫ АППРОКСИМАЦИИ УРАВНЕНИЙ ПЕРЕНОСА ТЕПЛА И СОЛИ
ДЛЯ ЗАДАЧ МОДЕЛИРОВАНИЯ МОРСКОЙ ЦИРКУЛЯЦИИ
С. Г. Демышев, д-р физ.-мат. наук, О. А. Дымова, канд. физ.-мат. наук
Морской гидрофизический институт РАН, Севастополь, Россия
NEW APPROXIMATION SCHEMES OF HEAT AND SALT TRANSFER EQUATIONS
FOR SIMULATION OF MARINE CIRCULATION
S. G. Demyshev, Dr.Sc., O. A. Dymova, Ph.D.
Marine Hydrophysical Institute of RAS, Sevastopol, Russia
Предложены новые конечно-разностные аппроксимации адвективных слагаемых в уравнениях переноса
тепла и соли. На основе результатов моделирования циркуляции Черного моря в реалистичных
атмосферных условиях и данных контактных измерений выполнена оценка точности воспроизведения
температуры и солености. Получено, что новые схемы улучшают точность воспроизведения солености
Черного моря в верхнем 100-м слое в течение всего года на 15–20%, толщины верхнего перемешанного
слоя в зимний период и глубины залегания верхней границы термоклина летом в центральной части моря
примерно на 10%.
New finite-difference approximations of the advective terms in the transfer equations of heat and salt are proposed.
Based on the modeling results of the Black Sea circulation under realistic atmospheric forcing and in-situ data,
the accuracy of reconstructed temperature and salinity is assessed. It is found that new schemes improve the
representation of the Black Sea salinity in the upper 100m layer throughout the year by 15–20 %, the thickness of
the upper mixed layer in winter and the depth of the upper boundary of the thermocline in summer in the central
sea part by about 10 %.
Для реконструкции и исследования гидрофизических характеристик морей и океанов,
непрерывных по времени и пространству, используются численные модели динамики морской
среды. Достоверность результатов расчетов зависит, в том числе, и от свойств разностных схем,
на основе которых строятся модели диагноза и прогноза морских течений. Одним из методов
уменьшения ошибки моделирования, особенно при длительном интегрировании, является
построение и использование разностных схем, удовлетворяющих законам сохранения. В работе
[1] получены новые схемы, при которых сохраняются одновременно температура в первой и в
K-ой (K>1), соленость в первой и L-ой (L>1) степени. Построенные аппроксимации
обеспечивают наличие дискретных нелинейных инвариантов для конечно-разностной системы
уравнений динамики моря в отсутствие внешних сил, трения и диффузии. В настоящей работе
на основе сопоставления данных наблюдений и результатов прогностического расчета
циркуляции Черного моря в 2016 г. проведена оценка точности воспроизведения температуры T
и солености S при использовании новых схем для уравнений переноса тепла и соли, обладающих
нелинейными инвариантами различной степени.
На основе вихреразрешающей модели динамики моря Морского гидрофизического
института [2] проведено три численных эксперимента, которые различались видом
аппроксимаций адвективных слагаемых в уравнениях переноса тепла и соли [1]. В первом
(обозначим T2S2) применялась традиционная аппроксимация нелинейных слагаемых, при
которой сохранялись T, S и T2, S2. Во втором (T5S3) использовалась схема, сохраняющая T, S и
T5, S3, в третьем (T3S5) обеспечено сохранение T, S и T3, S5. Все расчеты выполнены для 2016 г.
Для валидации результатов экспериментов использованы данные контактных измерений
температуры и солености, полученные буями-профилемерами Argo (https://www.coriolis.eu.org/
Data-Products/Data-selection) и в 87, 89, 91-ом рейсах НИС «Профессор Водяницкий» в 2016 г.
Для каждого буя/рейса определены среднеквадратические отклонения (СКО) модельных
температуры и солености от измеренных для трех экспериментов. В табл. 1 представлены СКО
для всех данных в характерных вертикальных слоях Черного моря: верхний приповерхностный
слой (0−5 м), слой сезонного термоклина (5−30 м), холодный промежуточный слой (30−100 м),
слой основного галоклина (100−300 м), глубинный слой (ниже 300 м).
224
Проблемы прикладной гидрофизики
СКО модельных температуры и солености по результатам трех экспериментов
T2S2
Глубина, м
0–5
5–30
30–100
100–300
300–1500
T
0,79
1,53
1,12
0,26
0,04
T5S3
S
0,28
0,23
0,67
0,43
0,08
T
0,96
1,54
0,87
0,28
0,06
Таблица 1
T3S5
S
0,22
0,17
0,58
0,51
0,09
T
0,94
1,59
0,84
0,27
0,06
S
0,22
0,17
0,56
0,50
0,09
Как показывают статистические оценки точности (табл. 1) при увеличении показателя
степени сохранения прогностических параметров уменьшается ошибка воспроизведения
солености в верхнем 100-метровом слое. Для температуры в экспериментах T3S5 и T5S3 в
верхнем 5-и метровом слое СКО увеличиваются, а в слое 30−100 м уменьшаются по сравнению
с T2S2.
Рассмотрим подробнее отличия между результатами трех экспериментов. Анализ
пространственных распределений поля солености на различных горизонтах показал, что разница
в величине S проявляется начиная с глубин примерно 50 м с конца весны. В экспериментах T3S5
и T5S3 в центральной части моря наблюдаются области повышенной солености по сравнению с
T2S2, что свидетельствует об усилении подъема вод. Такая картина прослеживается до конца
осени. В глубоководной части моря в это время работали буи Argo № 6901831 (восточная часть
моря) и № 6901900 (западная часть моря). Сопоставление с данными буя 6901831 демонстрирует
увеличение точности моделирования в экспериментах T3S5 и T5S3 после 8 июля (рис. 1, а), когда
буй переместился в область с наибольшей разницей между экспериментами. Отклонение
солености от измеренных значений вдоль траектории буя 6901900 свидетельствует, что в
западной части моря эксперимент T3S5 дает наименьшую ошибку (рис. 1, б). Анализ профилей
солености вдоль траекторий буев показал, что уменьшение ошибки моделирования солености в
центральной части связано с более точным воспроизведением верхней границы основного
галоклина в экспериментах T3S5 и T5S3.
Наиболее важные различия, обнаруженные в результатах моделирования поля
температуры, — это толщина сезонного термоклина и толщина холодного промежуточного слоя
(ХПС). В центральной части моря в экспериментах T3S5 и T5S3 с середины июня по конец
сентября слой скачка температуры и слой ХПС тоньше, чем в T2S2. В качестве примера на
рис. 2, а показаны вертикальные разрезы температуры вдоль 43° с.ш. в июле. Как видно в
окрестностях горизонта 25 м наблюдается сгущение изотерм в расчетах T3S5 и T5S3, а толщина
ХПС в среднем менее 50 м.
Анализ профилей температуры по данным Argo (рис. 2, б) и глубоководных станций рейса
№87 НИС «Профессор Водяницкий» (рис. 2 в) вблизи 43° с.ш. указывает на то, что эксперименты
T3S5 и T5S3 качественно и количественно точнее воспроизводят форму и толщину ХПС. Как
видно из рис. 2, б, в синяя и зеленая кривые находятся в лучшем соответствии с черной кривой в
слое 25−50 м.
а
б
Рис. 1. Отклонение модельной солености от измеренной на 100 м летом 2016 г.
а — для буя Argo № 6901831; б — для буя Argo № 6901900
225
Проблемы прикладной гидрофизики
Рис. 2. Изменение температуры с глубиной летом 2016 г.
а — по данным моделирования 30.07.2016; б — по данным буя Argo № 6901831;
в — по данным 87 рейса НИС «Профессор Водяницкий»
Таким образом показано, что схемы аппроксимации адвективных слагаемых в уравнениях
переноса тепла и соли, обеспечивающие сохранение прогностических параметров в степени
больше двух, улучшают точность воспроизведения солености Черного моря в верхнем 100-м
слое в течение всего года в среднем на 15–20 %, толщины верхнего перемешанного слоя в зимний
период и глубины залегания верхней границы слоя скачка температуры летом в центральной
части моря примерно на 10 %.
Литература
1. Демышев С. Г. Нелинейные инварианты дискретной системы уравнений динамики моря в
квазистатическом приближении // Морской гидрофизический журнал. 2023. Т. 39, № 5. С. 557−583.
2. Demyshev S., Dymova O. Analysis of the annual mean energy cycle of the Black Sea circulation for the
climatic, basin-scale and eddy regimes // Ocean Dynamics. 2022. Vol. 72. P. 259−278.
Работа выполнена при финансовой поддержке гранта РНФ № 23-27-00141.
226
Проблемы прикладной гидрофизики
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ГИДРОФИЗИЧЕСКИХ ПОЛЕЙ
В СЕВЕРО-ВОСТОЧНОЙ ЧАСТИ ЧЕРНОГО МОРЯ С ИСПОЛЬЗОВАНИЕМ
ЭКСПЕРИМЕНТАЛЬНО ОПРЕДЕЛЕННЫХ КОЭФФИЦИЕНТОВ
ВЕРТИКАЛЬНОГО ТУРБУЛЕНТНОГО ПЕРЕМЕШИВАНИЯ
Н. В. Маркова, канд. физ.-мат. наук, А. М. Чухарев, д-р физ.-мат. наук, О. А. Дымова, канд. физ.-мат. наук,
Д. А. Казаков
Морской гидрофизический институт РАН, Севастополь, Россия
NUMERICAL MODELING OF HYDROPHYSICAL FIELDS IN THE NORTHEASTERN
BLACK SEA USING EXPERIMENTALLY OBTAINED VERTICAL TURBULENT
MIXING COEFFICIENTS
N. V. Markova, Ph.D., A. M. Chukharev, Dr.Sc., O. A. Dymova, Ph.D., D. A. Kazakov
Marine Hydrophysical Institute of RAS, Sevastopol, Russia
Для улучшения воспроизведения региональной динамики Черного моря численными моделями за счет более
точного задания коэффициентов турбулентности анализируются итоги моделирования
гидрофизических полей в северо-восточной части моря у берегов Крыма. Поля, рассчитанные на основе
модели МГИ с определенными по данным натурных измерений коэффициентами вертикального
турбулентного перемешивания, сравниваются с аналогичными модельными расчетами с другими видами
параметризации турбулентности. Валидация результатов моделирования выполняется в сопоставлении
с данными наблюдений профилей температуры, солености и скорости течений.
To improve the Black Sea regional dynamics numerical modeling due to a more accurate specification of turbulent
exchange coefficients, the results of hydrophysical fields simulations in the northeastern Black Sea off the coast of
Crimea are analyzed. The fields derived from the MHI model using vertical turbulent mixing coefficients obtained
from in-situ measurements are compared to similar simulations but using other types of turbulence
parameterization. Validation of the modeling results is performed in comparison with observed data of
temperature, salinity and current velocity profiles.
Целью работы являлось получение на основе данных натурных наблюдений более
точного массива коэффициентов вертикального турбулентного перемешивания и их дальнейшее
применение в численном моделировании динамики вод Черного моря на региональном
масштабе. Расчет коэффициентов выполнялся с использованием данных наблюдений
микроструктуры гидрофизических полей (температуры, солености и компонент скорости),
полученных с помощью зондирующего комплекса «Сигма-1.5» [1] в 87-м рейсе НИС
«Профессор Водяницкий» в северо-восточной части Черного моря вблизи побережья Крыма.
Принцип действия прибора заключается в регистрации пульсаций гидрофизических параметров
при его свободном падении со скоростью 0,7 м/с до заданной глубины. Микроструктурный
датчик комплекса «Сигма-1.5» измеряет непосредственно три компоненты пульсаций скорости
(частота дискретизации 100 Гц). Вертикальная компонента не рассматривается в связи с большой
скоростью заглубления самого зонда. Скорость диссипации турбулентной энергии определялась
������������2 �, где ν — кинематическая вязкость. Расчет дисперсии
по соотношению 𝜀𝜀 = 15/2 ∙ ν�(𝑑𝑑𝑑𝑑/𝑑𝑑𝑑𝑑)
������������2 � производился путем интегрирования значений спектра градиента горизонтальных
�(𝑑𝑑𝑑𝑑/𝑑𝑑𝑑𝑑)
пульсаций скорости в выделенном диапазоне волновых чисел по методу Велча [2], который
позволяет дать оценку ε с хорошим вертикальным разрешением (выбрано равным 2 м). Для
вычисления коэффициента вертикального турбулентного перемешивания K была использована
формула Осборна [3] 𝐾𝐾 ≅ 𝑅𝑅𝑓𝑓 𝜀𝜀/�𝑁𝑁 2 �1 − 𝑅𝑅𝑓𝑓 ��, где Rf — динамическое число Ричардсона
(принималось равным 1/4 [4]); N — частота плавучести.
Численная нелинейная z-координатная модель МГИ динамики морской среды
разработана в Морском гидрофизическом институте [5]. На ее основе выполнены построение и
анализ 3-мерных полей температуры, солености и скорости с горизонтальным разрешением
0,5 км, на 27 уровнях по вертикали для 25-суточного интервала, включающего все время съемок
в 87-м рейсе НИС «Профессор Водяницкий» (30.06–18.07.2016). Исследуемая акватория
ограничена (43,99–45,15°с.ш., 33,37–36,46°в.д.). Атмосферный форсинг определялся согласно
227
Проблемы прикладной гидрофизики
данным ERA5, рельеф дна — батиметрии EMODnet. Условия на жидких границах брались из
результатов предварительного расчета по бассейновой версии модели с разрешением 1,6 км.
Выходные поля записывались каждые 6 ч. Для использования в модели вычисленные значения
коэффициентов турбулентного перемешивания K усреднялись по интервалам глубин,
идентичным модельным. В узлах, где коэффициенты не могли быть рассчитаны из-за отсутствия
данных измерений, связанного с особенностями проведения наблюдений (на глубинах менее 10
и более 300 м), были взяты среднегодовые значения. Обозначим МК модельный расчет с
коэффициентами К.
Валидация и анализ результатов. Определение качества воспроизводимых моделью
полей (валидация результатов моделирования) проводилось по итогам их сопоставления с
данными наблюдений температуры, солености и скорости течений, выполненных на тех же
станциях 87-го рейса НИС «Профессор Водяницкий», где были получены данные для
нахождения K, но с помощью других измерительных комплексов — CTD SBE 911plus и Idronaut
Ocean Seven 320 PlusM. Кроме расчета МК, для сопоставления были использованы данные
численного моделирования, проведенного с другими коэффициентами турбулентности, а
именно: 1 — согласно параметризации Пакановски-Филандера [6], на сетке 0,5 км с
ассимиляцией наблюдений (обозначим этот расчет ПФ); 2 — с моделью турбулентности
Меллора-Ямады уровня замыкания 2,5 [7], на сетке 1,6 км также с ассимиляцией наблюдений
(обозначим этот расчет МЯ). Для валидации все данные приводились к соответствующим
среднесуточным значениям и выполнялась их статистическая оценка в выбранных слоях по
глубине. В табл. 1 приведены среднеквадратические отклонения (СКО) модельных значений от
наблюденных температуры (Т), солености (S), зональной и меридиональной компонент скорости
(U, V) для тех слоев, где в расчет МК включались экспериментально определенные
коэффициенты турбулентного перемешивания. Жирным шрифтом выделены более низкие
значения СКО, соответствующие лучшему воспроизведению в МК гидрофизических параметров
по сравнению с двумя другими расчетами.
Среднеквадратические отклонения модельных температуры (°С), солености (‰)
и составляющих скорости (м/с) от наблюденных
Слои по
глубине, м
10–30
30–100
100–300
10–30
30–100
100–300
Расчет
МК (сетка 0,5 км)
СКО(T)
5,898
0,648
0,216
СКО(U)
0,183
0,133
0,063
СКО(S)
0,260
0,628
0,395
СКО(V)
0,120
0,101
0,063
ПФ (сетка 0,5 км,
ассимиляция)
СКО(T)
СКО(S)
4,675
0,224
1,401
0,556
0,175
0,402
СКО(U)
СКО(V)
0,180
0,123
0,132
0,101
0,065
0,068
Таблица 1
МЯ (сетка 1,6 км,
ассимиляция)
СКО(T)
СКО(S)
5,660
0,251
0,693
0,668
0,227
0,428
СКО(U)
СКО(V)
0,186
0,135
0,138
0,112
0,068
0,066
Из таблицы видно, что все модельные расчеты дают сопоставимые погрешности
вычисленных значений, относительно наблюденных T, S и измеренных компонент скорости
(максимальные значения модуля скорости не превышают 1 м/с). При этом использование
экспериментально определенных коэффициентов в МК по сравнению с расчетом МЯ дает более
точные значения T, S на горизонтах глубже 30 м (а также существенно экономит
вычислительные ресурсы из-за необходимости включать модель турбулентности внутри МЯ на
каждом шаге по времени). По сравнению с расчетом ПФ существенное улучшение происходит в
воспроизведении МК температуры в слое 30–100 м. Также небольшое уточнение значений S в
МК отмечается в слое 100–300 м. В отдельных случаях в воспроизведении компонент скорости
в МК также получено некоторое уменьшение СКО, однако сами отклонения скорости довольно
большие во всех рассмотренных расчетах.
При сопоставлении результатов моделирования следует подчеркнуть, что в расчетах МЯ и
ПФ использовалась процедура ассимиляции натурных данных T, S, то есть модельные значения
228
Проблемы прикладной гидрофизики
в процессе расчета «подтягивались» к наблюденным, в то время как при моделировании МК с
новыми коэффициентами турбулентности ассимиляция не применялась. Необходимо также
учитывать, что в МК на воспроизведение динамики слоя 10–30 м влиял переход от
среднегодовых коэффициентов в поверхностном слое к экспериментально определенным K.
Связанные с этим погрешности при моделировании гидрофизических параметров планируется
минимизировать уточнением коэффициентов в поверхностном слое по другой методике.
Выводы. Таким образом, использование в численной модели динамики моря
рассчитанных по данным измерений коэффициентов вертикального турбулентного
перемешивания позволило уточнить значения моделируемых параметров без применения
процедуры ассимиляции данных наблюдений в двух из трех слоев по глубине, где были
применены эти коэффициенты. Для улучшения воспроизведения динамики верхнего слоя
необходимо усовершенствовать расчет включением региональных коэффициентов
турбулентного обмена в поверхностном слое.
Литература
1. Самодуров А. С., Дыкман В. З., Барабаш В. А., Ефремов О. И., Зубов А. Г., Павленко О. И.,
Чухарев А. М. Измерительный комплекс «Сигма-1» для исследования мелкомасштабных характеристик
гидрофизических полей в верхнем слое моря // Морcкой гидрофизический журнал. 2005. № 5. С. 60–71.
EDN: VSBWXN.
2. Welch P. D. The use of Fast Fourier Transform for the estimation of power spectra: A method based on
time averaging over short, modified periodograms // IEEE Transactions on Audio and Electroacoustics. 1967.
V. 15, № 2. P. 70–73. DOI: 10.1109/TAU.1967.1161901.
3. Osborn T. R. Estimations of local rate of vertical diffusion from dissipation measurements //
J. Phys. Oceanogr. 1980. V. 10. P. 83–89. DOI: 10.1175/1520-0485(1980)010<0083:EOTLRO>2.0.CO;2.
4. McEwen A. D. The kinematics of stratified mixing through internal wave breaking // Journal of Fluid
Mechanics. 1983. № 128. P. 47–57. DOI: 10.1017/S0022112083000373.
5. Demyshev S., Dymova O. Analysis of the annual mean energy cycle of the Black Sea circulation for the
climatic, basin-scale and eddy regimes // Ocean Dynamics. 2022. Vol. 72. P. 259–278. DOI: 10.1007/s10236-02201504-0.
6. Pacanowski R. C., Philander S. G. H. Parameterization of vertical mixing in numerical models of
tropical oceans // J. Phys. Oceanogr. 1981. Vol. 11, Iss. 11. P. 1443−1451. DOI: 10.1175/15200485(1981)011<1443:POVMIN>2.0.CO;2.
7. Mellor G. L., Yamada T. Development of a turbulence close model for geophysical fluid problems //
Rev. Geophys. Space Phys. 1982. Vol. 20. P. 851–875. DOI: 10.1029/RG020i004p00851.
Работа выполнена при поддержке гранта РНФ № 22-17-00150.
229
Проблемы прикладной гидрофизики
О ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ МОРСКОЙ СРЕДЫ ПРИ ЧАСТИЧНО
НЕКОНТРОЛИРУЕМОЙ ОРИЕНТАЦИИ ГИДРОСТАТИЧЕСКОГО ИЗМЕРИТЕЛЯ
Г. А. Федотов, д-р техн. наук
АО «Морские неакустические комплексы и системы», Санкт-Петербург, Россия
ON THE ACCURACY OF DETERMINING THE DENSITY OF THE MARINE
ENVIRONMENT WITH A PARTIALLY UNCONTROLLED ORIENTATION
OF THE HYDROSTATIC METER
G. A. Fedotov, Dr.Sc.
JSC «Marine non-acoustic complexes and systems», St. Petersburg, Russia
Продолжены теоретические исследования гидростатического измерителя плотности, образованного
четырьмя датчиками давления, расположенными в вершинах правильной треугольной пирамиды.
Получены новые аналитические выражения и иллюстрирующие их графики, позволяющие количественно
оценить погрешность определения плотности морской среды для важного частного случая ограниченно
неконтролируемой ориентации измерителя в пространстве.
Theoretical studies of a hydrostatic density meter formed by four pressure sensors located at the vertices of a
regular triangular pyramid have been continued. New analytical expressions and graphs illustrating them have
been obtained, which make it possible to quantify the error in determining the density of the marine environment
for an important special case of a limited uncontrolled orientation of the meter in space.
Данная публикация продолжает серию работ [1−7], посвящённых новой модификации
гидростатического метода определения плотности морской воды. Метод предполагает
совместную обработку сигналов четырёх датчиков давления по специальному алгоритму.
Пусть три датчика из четырёх, образующих измерительную систему, лежат в вершинах
основанияправильной треугольной пирамиды, а четвёртый (с номером ноль) расположен в её
вершине (рис. 1). Угол при вершине пирамиды равен α ( cos α ≡ c ), длина боковых ребер равна
l , Pi ( i = 0,1, 2,3 ) — сигналы датчиков давления. Тогда плотность морской среды определяется
следующим образом: ρ = G g , где g — ускорение свободного падения, gradP ≡ G — модуль
градиента гидростатического давления. Величина G вычисляется по измеренным значениям
bi = δ Pi l , где δ Pi ≡ Pi − P0 ( i = 1, 2,3 ) — разности сигналов датчиков давления. Неточность
определения G является основным источником ошибки определения ρ . Пусть погрешности
величин bi одинаковы и равны ∆b . Безразмерная функция F характеризует величину ∆G —
погрешность определения величины G , выраженную в единицах ∆b : F ≡ ∆G ∆b . Угол ϕ
между векторами h и g (рис. 1) характеризует наклон измерителя в поле силы тяжести.
Величина ∆G зависит от ориентации системы в поле g . Вид функции F (α , ϕ ) приведен в
работе [7].Пусть угол наклона системы изменяется неконтролируемым образом, но плотность
вероятности распределения угла наклона w(ϕ ) известна. Рассмотрим практически важный
случай, когда наиболее вероятным является угол 45 . Примем для оценок
cos(ϕ − π 4)
;
45 − ϕ0 < ϕ < 45 + ϕ0 ;
w(ϕ ) = 2sin ϕ0
−180 < ϕ < 45 − ϕ0 ; 45 + ϕ0 < ϕ < 180.
0;
(1)
Графики функции w(ϕ ) для пяти значений угла ϕ0 (1− 15 ; 2− 30 ; 3− 45 ; 4− 60 ; 5− 90 )
приведены на рис. 2.
230
Проблемы прикладной гидрофизики
Рис. 2. Функция w(ϕ ) для различных значений
Рис. 1. Наклонная ориентации измерителя в поле
силы тяжести
Рис. 3. Графики функции Φ (α )
(пояснения в тексте)
угла ϕ0 (пояснения в тексте)
Рис. 4. Тонкая структура функции Φ (α )
для двух областей изменения угла α
Зависимость погрешности определения градиента давления от конфигурации датчиков
= F (ϕ ) ∆b ) и охарактеризовать функцией
можно оценить путем осреднения по углу ( ∆G
π
Φ (α ) : Φ (α ) = ∆G ∆b = F (ϕ ) = ∫ F (ϕ )w(ϕ )dϕ .
−π
Для рассматриваемых модельных функций F (ϕ ) и w(ϕ ) интегрирование приводит к
следующему выражению для функции Φ (α ) :
=
Φ (α )
1
1
S .
K p + Km +
3 c sin ϕ0
4 2(1 − c)(1 + 2c)
(2)
Графики функции Φ (α ) приведены на рис. 3 и рис. 4. Нумерация графиков та же, что и на рис. 2.
В выражении (2) введены обозначения (3) – (9):
231
Проблемы прикладной гидрофизики
Kp =
2 + c(1 + 3sin 2ϕ0 ) ;
(3)
Tp cos ϕ0 + sin ϕ0 ;
=
(5)
Km =
2 + c(1 − 3sin 2ϕ0 ) ;
(4)
Tm cos ϕ0 − sin ϕ0 .
=
(6)
S (α ); 0 < α ≤ 90 ;
S = 1
S 2 (α ); 90 ≤ α < 120 ;
S1 (α ) = (1 − c) ln
(7)
3cTp
3cTm
+ (1 + 2c) arcsin
− arcsin
;
+
+
K m + 3cTm
c
c
2(1
2
)
2(1
2
)
(8)
−3cTp
−3cTm
+ (1 − c) arcsin
− arcsin
.
−
−
K p + −3cTm
c
c
2(1
)
2(1
)
(9)
K p + 3cTp
S 2 (α ) = (1 + 2c) ln
K m + −3cTp
Полученные соотношения позволяют оценить точность определения плотности морской
среды гидростатическим методом для важного частного случая ограниченно неконтролируемой
пространственной ориентации измерителя.
Представленные данные могут служить основой для рационального выбора конфигурации
датчиков давления, формирующих гидростатический измеритель, в составе гидрофизической
системы с учетом её конструкции и условий использования.
Литература
1. Федотов, Г. А. Новая модификация гидростатического метода определения плотности морской
воды / Г. А. Федотов // Фундаментальная и прикладная гидрофизика. 2013. Т. 6, № 1. С. 58−65.
2. Федотов, Г. А. О точности определения плотности морской воды с помощью новой модификации
гидростатического метода // Тр. всерос. конф. «Прикладные технологии гидроакустики и гидрофизики»
2016. № 13. С. 205−208.
3. Федотов, Г. А. Оценка точности определения плотности морской воды при неконтролируемой
ориентации гидростатического измерителя // Тр. всерос. конф. «Прикладные технологии гидроакустики и
гидрофизики». 2018. С. 275−277.
4. Федотов, Г. А. О некоторых особенностях новой модификации гидростатического метода
определения плотности морской воды // Тр. всерос. конф. «Прикладные технологии гидроакустики и
гидрофизики» 2020. С. 284−287.
5. Гусев, Л. Б., Федотов, Г. А. Патент № 2747854 C2 Российская Федерация, МПК G01N 9/26.
Способ измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры:
№ 2020116797; заявл. 18.05.2020: опубл. 17.05.2021.
6. Федотов, Г. А. О влиянии конфигурации и ориентации системы датчиков давления на точность
измерения плотности морской среды гидростатическим методом // Мат. конф. «Управление в морских
системах» (УМС-2022). СПб.: АО «Концерн «ЦНИИ «Электроприбор», 2022. С. 100−103.
7. Федотов, Г. А. Оптимальная конфигурация датчиков давления при наклонной ориентации
гидростатического измерителя плотности морской среды // Тр. всерос. конф. «Прикладные технологии
гидроакустики и гидрофизики». СПб.: Издательство «ЛЕМА», 2023. С. 250-253.
232
Проблемы прикладной гидрофизики
МЕТОД ДИСТАНЦИОННЫХ ИЗМЕРЕНИЙ ГИДРООПТИЧЕСКИХ
ХАРАКТЕРИСТИК ПРИПОВЕРХНОСТНОГО СЛОЯ С ИСПОЛЬЗОВАНИЕМ
СУДОВОГО ЛИДАРА
В. А. Глухов, Ю. А. Гольдин, канд. физ.-мат. наук, О. В. Глитко, М. А. Родионов, канд. физ.-мат. наук
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
METHOD FOR REMOTE MEASUREMENTS OF HYDROOPTICAL
CHARACTERISTICS OF THE NEAR-SURFACE LAYER UTILIZING
A SHIPBOARD LIDAR
V. A. Glukhov, Yu. A. Goldin, Ph.D., O. V. Glitko, M. A. Rodionov, Ph.D.
Shirshov Institute of Oceanology, RAS, Moscow, Russia
Разработан метод измерения гидрооптических характеристик приповерхностного слоя
с использованием судового лидара ПЛД-1. В основу метода положено сопоставление данных лидарного
зондирования и данных синхронных контактных измерений с использованием погружного прозрачномера.
Получена регрессионная зависимость между показателем ослабления света морской водой, измеренного
прозрачномером, и показателем ослабления лидарного эхо-сигнала (коэффициент детерминации 0,95).
Регрессионная зависимость определена для широкого диапазона изменчивости показателя ослабления и
справедлива для технических характеристик лидара ПЛД-1 и конкретной геометрии зондирования.
A method for remote measurements of hydrooptical characteristics of the near-surface layer utilizing the PLD-1
shipborne lidar has been developed. The method involves comparing lidar survey data with synchronous contact
measurement data obtained from a submersible transmissometer. A regression relationship was established
between the seawater beam attenuation coefficient, measured by the transmissometer, and the lidar attenuation
coefficient, with a coefficient of determination of 0,95. The regression relationship between the seawater beam
attenuation coefficient and the lidar attenuation coefficient remains valid across a wide range of variations
in the seawater characteristics. This relationship has been specifically developed for the technical specifications
of the PLD-1 lidar and the shipborne sensing geometry employed in the measurements.
Важным направлением исследований с использованием морских лидаров судового и
авиационного базирования является дистанционное определение гидрооптических
характеристик приповерхностного слоя [1−4]. В ряде экспериментальных [1, 3] и теоретических
[5, 6] работ показано, что связь между параметрами лидарных эхо-сигналов и гидрооптическими
характеристиками зависит от характеристик лидара и геометрии зондирования — высоты
размещения лидара над поверхностью воды, угла поля зрения приемной оптической системы и
размеров площадки на поверхности воды, с которой приемная система собирает рассеянное
назад излучение. Каждому конкретному лидару и его геометрии зондирования соответствуют
свои соотношения между гидрооптическими характеристиками и параметрами лидарного эхосигнала. Универсального метода пересчета параметров регистрируемых лидарных эхо-сигналов
нет.
Цель данной работы — разработка метода измерения гидрооптических характеристик
приповерхностного слоя с использованием судового лидара с относительно узким углом поля
зрения приемной оптической системы.
Для проведения исследований использован судовой поляризационный лидар ПЛД-1
(разработка ИО РАН [7]). Длина волны зондирующего излучения — 532 нм, длительность
зондирующего импульса по уровню 0,5–7 нс, энергия зондирующего импульса — 20 мДж, угол
поля зрения приемной оптической системы — 2 град. (35 мрад), диаметр входного объектива
63 мм. Для оцифровки и регистрации лидарных эхо-сигналов использовался цифровой
четырехканальный осциллограф LeCroy HDO4034. Частота оцифровки — 2,5 ГГц, разрядность
АЦП — 14 бит.
Работы выполнялись в рамках первой части 89-го рейса НИС «Академик Мстислав
Келдыш» в западной части Карского моря с 5 по 19 сентября 2022 г. При проведении
исследований оптический блок лидара размещался на 8-й палубе судна. Высота оптического
блока над поверхностью воды — около 15 м. Угол зондирования θ=20° от вертикали.
Протяженность воздушного участка трассы зондирования H составляла около 16 м. В течение
233
Проблемы прикладной гидрофизики
всего рейса проводилась регистрация лидарных эхо-сигналов с частотой 1 Гц. Измерения
проводились как во время выполнения станций, так и на ходу судна. Лидарная съемка
сопровождалась синхронными сопутствующими измерениями. На станциях с помощью
погружаемого прозрачномера ПУМ-200 (разработка ИО РАН [8]) выполнялись измерения
вертикальных профилей показателя ослабления света морской водой с на длине волны λ=530 нм.
Точность измерения с в диапазоне 0,050−1,0 м−1 составляет 0,005 м−1.
Для обработки данных лидарного зондирования использовался стандартный подход,
основанный на применении аппроксимаций лидарного эхо-сигнала функцией, вид которой
следует из лидарного уравнения [1, 5, 9]. Показатель ослабления лидарного эхо-сигнала α(z) в
соответствии с лидарным уравнением характеризует экспоненциальную форму спада лидарного
эхо-сигнала. В общем случае он зависит от вертикального распределения гидрооптических
характеристик приповерхностного слоя. В случае однородных по глубине вод α является
постоянной величиной. При определении α использовался участок спада эхо-сигнала,
соответствующий диапазону глубин от 4 до 8 м. Участок выше 4 м подвержен сильному влиянию
поверхностного волнения. Ниже 8−10 м во многих случаях наблюдается изменчивость
гидрооптических характеристик. При обработке данных лидарной съемки значение α
определялось для каждого зарегистрированного эхо-сигнала. На станциях, продолжительность
которых составляла от 1 до 3 часов, проводилось усреднение всех полученных значений α (от 3
до 11 тысяч зондирований), что позволило снизить влияние случайных ошибок измерений.
Неизменность гидрооптических характеристик на станции контролировалась по форме
лидарного эхо-сигнала и по отсутствию существенной изменчивости α с течением времени.
Анализ данных синхронного зондирования с использованием прозрачномера и лидара на
станциях позволяет установить связь между показателем ослабления света морской водой и
показателем ослабления лидарного эхо-сигнала. В расчет взяты только те станции, на которых
распределение по глубине с(z), а также температуры и флуоресценции хлорофилла «а» в верхнем
слое до 10 м было однородным. Такие условия наблюдались на 23 станциях, расположенных на
разных участках маршрута. Для каждой из этих станций рассчитано среднее значение α по всему
массиву сигналов, зарегистрированных на данной станции. На рис. 1 представлена диаграмма
соответствия значений α в слое 4–8 м и значений c, измеренных прозрачномером ПУМ-200 на
этих станциях.
Рис. 1. Диаграмма соответствия значений α в слое 4–8 м и значений c,
измеренных прозрачномером ПУМ-200 на этих станциях
234
Проблемы прикладной гидрофизики
Для каждого значения α на рис. 1 показано стандартное отклонение измеряемой величины.
Диапазон измерений c составил от 0,17 м−1 до 1,1 м−1. Рис. 1 демонстрирует наличие линейной
связи между α и c в указанном интервале изменения показателя ослабления. Регрессионная
зависимость показана сплошной красной линией, пунктирными линиями обозначен 95 %-ый
доверительный интервал.
Полученный массив данных позволил определить уравнение, позволяющее по данным
лидарного зондирования определить показатель ослабления света c. Уравнение этой линейной
регрессии имеет вид
(1)
с=
7,10 ⋅ α − 0,81 ,
L
где cL — показатель ослабления света, рассчитанный по данным лидарного зондирования.
Коэффициент детерминации этой линейной регрессии составил R2=0,95. Точность определения
коэффициентов регрессии методом наименьших квадратов составляет 7,10 ± 0,37 и
0,81 м−1±0,07 м−1. Полученная регрессионная связь α и c справедлива для технических
характеристик лидара ПЛД-1 и конкретной геометрии зондирования.
В работе разработан метод, позволяющий провести сопоставление данных лидарной
съемки и данных синхронных контактных измерений. Полученное регрессионное соотношение
(1) позволяет преобразовывать пространственные распределения α, полученные в результате
лидарной съемки вдоль маршрута судна, в пространственные распределения показателя
ослабления света c. При продолжении исследований необходимо провести сравнение показателя
ослабления cL, полученного по данным лидарной съемки на ходу судна, с данными проточного
измерительного комплекса, позволяющего регистрировать значения показателя ослабления c на
глубине водозабора, особенно вблизи фронтальных зон. Также интерес представляет поиск
связей между показателем ослабления лидарного эхо-сигнала α и такими гидрооптическими
характеристиками, как показатель поглощения a и показатель диффузного ослабления Kd при
различных значениях вероятности выживания фотона ω0.
Литература
1. Collister B. L., Zimmerman R. C., Hill V. J., Sukenik C. I., Balch W. M. Polarized lidar and ocean
particles: insights from a mesoscale coccolithophore bloom // Applied Optics. 2020. Vol. 59, № 15. P. 4650−4662.
doi:10.1364/AO.389845.
2. Goldin Y. A., Vasilev A. N., Lisovskiy A. S., Chernook V. I. Results of Barents Sea airborne lidar survey
// Current Research on Remote Sensing, Laser Probing, and Imagery in Natural Waters SPIE. 2007. Vol. 6615.
P. 126–136. doi:10.1117/12.740456.
3. Peituo Xu, Dong Liu, Yibing Shen et al. Design and validation of a shipborne multiple-field-of-view
lidar for upper ocean remote sensing // Journal of Quantitative Spectroscopy and Radiative Transfer. 2020.
Vol. 254. P. 107201. doi:10.1016/j.jqsrt.2020.107201.
4. Коханенко Г. П., Балин Ю. С., Пеннер И. Э., Шаманаев В. С. Лидарные и in situ измерения
оптических параметров поверхностных слоев воды в озере Байкал // Оптика атмосферы и океана. 2011.
Т. 24, № 5. С. 377–385.
5. Браво-Животовский Д. М., Гордеев Л. Б., Долин Л. С., Моченев С. Б. Определение показателей
поглощения и рассеяния морской воды по некоторым характеристикам светового поля искусственных
источников света / Под ред. А. С. Монина, К. С. Шифрина // Гидрофизические и гидрооптические
исследования в Атлантическом и Тихом океанах. М.: Наука, 1974. С. 153–158.
6. Gordon H. R. Interpretation of airborne oceanic lidar: effects of multiple scattering // Applied Optics.
1982. Vol. 21, № 16. P. 2996–3001.
7. Глухов В. А., Гольдин Ю. А., Родионов М. А. Экспериментальная оценка возможностей лидара
ПЛД-1 по регистрации гидрооптических неоднородностей в толще морской среды // Фундаментальная и
прикладная гидрофизика. 2017. Т. 10, № 2. С. 41–48. doi:10.7868/S207366731702006X.
8. Артемьев В. А., Таскаев В. Р., Григорьев А. В. Автономный прозрачномер ПУМ-200 // Мат. XVII
междун. науч.-техн. конф. «Современные методы и средства океанологических исследований (МСОИ2021)». М.: Институт океанологии им. П. П. Ширшова РАН, 2021. С. 95–99.
9. Vasilkov A. P., Goldin Yu.A., Gureev B. A., Hoge F.E., Swift R.N., and Wright C.W., Airborne polarized
lidar detection of scattering layers in the ocean // Appl. Opt. 2001. Vol. 40. P. 4353-4364.
Работа была выполнена в рамках государственного задания ИО РАН по теме № FMWE-2024-0028.
235
Проблемы прикладной гидрофизики
СПОСОБ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ
ГИДРООПТИЧЕСКИХ НЕОДНОРОДНОСТЕЙ В ПРИПОВЕРХНОСТНОМ СЛОЕ
МОРСКОЙ ВОДЫ
В. Л. Дерновский1, канд. техн. наук, С. А. Мальков1, канд. техн. наук, М. А. Лукин2, канд. техн. наук
1
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
2
Университет ИТМО, Санкт-Петербург, Россия
METHOD FOR RECOVERING THE SPATIAL DISTRIBUTION OF HYDRO-OPTICAL
INHOMOGENEITIES IN THE SURFACE LAYER OF SEA WATER
V. L. Dernovskii1, Ph.D., S. A. Malkov1, Ph.D., M. A. Lukin2, Ph.D.
1
Shirshov Institute of Oceanology RAS, Moscow, Russia
2
ITMO University, St. Petersburg, Russia
В работе предложен способ автоматической обработки лидарных эхо-сигналов, регистрируемых по
трассе движения носителя аппаратуры, для восстановления пространственного распределения
гидрооптических неоднородностей в приповерхностном слое морской воды. Пространственное
распределение строится с применением интерполяции по естественным соседним точкам на двумерной
сетке. Апробация способа выполняется на наборе сигналов лидарной съемки прибрежных районов
Баренцева моря, полученных в период цветения кокколитофорид.
This paper proposes a method for automatically processing lidar echo signals recorded along the path of the
equipment carrier to restore the spatial distribution of hydro-optical inhomogeneities in the near-surface layer of
sea water. The spatial distribution is constructed using interpolation from natural neighboring points on a twodimensional grid. The method is tested on a set of signals from lidar surveys of the coastal areas of the Barents
Sea, obtained during the bloom of coccolithophores.
Кокколидофоридные цветения (КЦ) являются значимым явлением в мировом океане, так
как имеют большие масштабы оказывают влияние на тепловой баланс и баланс углекислого газа.
КЦ меняет параметры поглощения солнечного света и альбедо водной среды [1]. Изучение
интенсивности распространения КЦ и оценка занятых площадей обычно производится на основе
спутниковых данных, таких как сканер цвета и радиометр [2].
Однако использование спутниковых данных не позволяет анализировать распределения с
высоким пространственным и временным разрешением. Для решения этой проблемы возможна
высокоскоростная съемка морских акваторий с помощью авиационного лидара, который
позволяет получать информацию о вертикальных градиентах показателя ослабления и
светорассеивающих слоях. Дополнительные возможности появляются в случае анализа
получаемой информации в реальном времени [3] с последующим маневрированием по
результатам анализа. В [4] авторами был разработан метод, основанный на вычитании
эталонного сигнала. В таком случае исследователи сталкиваются со сложностью при
определении участка акватории, как фонового, в условиях реальных практических измерений.
Измерения дополнительно будут осложнены тем, что волнение и блики на поверхности могут
вызвать кратное усиление регистрируемого лидарного сигнала. В настоящей работе
обрабатываются сигналы лидарной съемки близких к берегу морских акваторий,
характеризовавшихся интенсивным КЦ в приповерхностном слое. Основной задачей
описываемого в данной работе этапа обработки данных является восстановление границ
крупных областей с повышенной концентрацией кокколитофорид.
Общепризнанным подходом в обработке эхо-сигналов является подбор функции
аппроксимации, наиболее близко описывающей кривую затухания эхо-сигнала, вид которой
следует из лидарного уравнения [5]:
𝑒𝑒𝑒𝑒𝑒𝑒(−𝛼𝛼⋅𝑐𝑐 𝑡𝑡)
𝑈𝑈(𝑡𝑡) = 𝛽𝛽 ⋅ (2𝑛𝑛 𝐻𝐻+𝑐𝑐 𝑤𝑤𝑡𝑡)2 ,
𝑤𝑤
236
𝑤𝑤
(1)
Проблемы прикладной гидрофизики
где α, β — параметры аппроксимации; cw — скорость света в воде; t — время, от момента
пересечения зондирующим импульсом поверхности воды; nw — показатель преломления
морской воды; H — протяженность участка трассы зондирования.
В настоящей работе предлагается использовать площадь под графиком лидарного эхосигнала в качестве интегральной характеристики каждого импульса, позволяющей качественно
оценить изменение внешних условий или появления оптических неоднородностей морской
воды. Неоднородности в поверхностном слое характеризуются наличием отклонения от
экспоненциальной зависимости в зарегистрированном эхо-сигнале. Восстановление
невозмущенного сигнала для каждого отдельного зондирования выполняется с использованием
уравнения (1) по специально сформированному набору точек с первого и третьего участков
сигнала так, чтобы исключить влияние неоднородностей, находящихся на среднем участке на
параметры аппроксимации [6]. Степень зарегистрированной неоднородности в таком случае
можно охарактеризовать как отношение площади под графиком зарегистрированного эхосигнала к площади под графиком аппроксимации на заданном участке.
Предложенная характеристика не зависит от скачков амплитуды сигнала. Исключением
служат значения усиления, при которых происходит насыщение фотоэлектронного умножителя
приёмника или пропадает сигнал на глубине, большей глубины видимости белого диска.
Во время эксперимента проводилась контрольная фотосъемка с частотой кадров 2 Гц.
Данные фотосъемки и данные лиданого зондирования были синхронизированы и привязаны к
географическим координатам. Фотографии обрабатывались с помощью специального набора
цифровых фильтров, для выравнивания яркости и гистограмм синего и зеленого цветов.
На рис. 1, a приведен пример сигнала с зарегистрированной неоднородностью, а на
рис. 1, б характерное изображение, полученное фотокамерой.
а
Рис. 1. Регистрация неоднородностей в приповерхностном слое
a — форма эхо-сигнала и восстановленный однородный сигнал (аппроксимация); б — характерное изображение
237
Проблемы прикладной гидрофизики
Рис. 2. Восстановленное распределение гидрооптическх неоднородностей в зоне интенсивного КЦ
На рис. 2 приведена восстановленное по трем параллельным линиям измерений
распределение гидроопических неоднородностей в зоне интенсивного КЦ.
Восстановление производится с помощью интерполяции по естественным соседним
точкам на двумерной сетке [7]. Основные свойства этого алгоритма заключаются в том, что он
локальный, использует только подмножество выборок, окружающих точку поиска значения, и
интерполированные высоты гарантированно находятся в пределах диапазона используемых
выборок. Он не определяет линии тренда и не создает пиков, впадин, гребней или плоских
участков, которые не представлены входными данными. Поверхность проходит через входные
данные и является гладкой везде, за исключением мест расположения входных данных.
Алгоритм реализуется на основе построения ячеек Вороного.
Таким образом, основные подходы к решению задачи восстановления пространственного
распределения гидрооптических неоднородностей в приповерхностном слое заключаются в
следующем: 1. Невозмущенным считается эхо-сигнал от единого квазиоднородного слоя. Он
восстанавливается для каждого зондирования по определенному набору точек.
2. Характеристика строится на основе отношения площадей под графиками,
зарегистрированного и восстановленного сигналов на задонном участке эхо-сигнала.
3. Предложенная характеристика не зависит от изменения усиления (амплитуды) сигнала,
вызванной изменением угла падания лазерного луча на поверхность воды и влиянием солнечного
света 4. Регистрация возмущения в каждой точке зондирования позволяет восстановить поле
возмущений. Восстанавливается с помощью интерполяции по естественным соседним точкам на
двумерной сетке.
238
Проблемы прикладной гидрофизики
Литература
1. Копелевич О. В., Вазюля С. В., Глуховец Д. И., Салинг И. В. Биооптические характеристики и
солнечная радиация в поверхностном слое Баренцева моря // Система Баренцева моря / Под ред.
А. П. Лисицына. М.: ГЕОС, 2021. С. 236−245. doi: 10.29006/978-5-6045110-0-8.
2. Копелевич О. В., Буренков В. И., Вазюля С. В., Шеберстов С. В. Проблемы индикации
кокколитофоридных цветений по спутниковым данным // Современные проблемы дистанционного
зондирования Земли из космоса. 2012. Т. 9, № 5. C. 241–250.
3. Дерновский В. Л., Глухов В. А., Гольдин Ю. А., Глитко О. В., Родионов М. А. Способ
автоматизированной обработки лидарных эхо-сигналов для изучения неоднородностей в толще морской
воды // Материалы конф. «Комплексные исследования Мирового океана». СПб.: Своё издательство, 2023.
С. 515−516. ISBN 978-5-4386-2269-7.
4. Zhong C.; Chen P.; Pan D. An Improved Adaptive Subsurface Phytoplankton Layer Detection Method
for Ocean Lidar Data // Remote Sens. 2021. Vol. 13. P. 3875.
5. Vasilkov A. P., Goldin Yu. A., Gureev B. A., Hoge F. E., Swift R. N., Wright C. W. Airborne polarized
lidar detection of scattering layers in the ocean // Applied Optics. 2001. Vol. 40, № 24. P. 4353−4364.
doi:10.1364/AO.40.004353.
6. Дерновский В. Л., Глухов В. А., Глитко О. В. Разработка способа автоматической обработки
лидарных эхо-сигналов для оценки пространственной изменчивости гидрооптических характеристик // Тр.
Всерос. конф. «Современные проблемы оптики естественных вод». М.: изд-во «ИО РАН», 2023.
С. 177−182. DOI: 10.29006/ 978-5-6051054-4-2-2023.
7. Sibson, R. A Brief Description of Natural Neighbor Interpolation. Сh. 2 // Interpolating Multivariate
Data. New York: John Wiley & Sons, 1981. Р. 21–36.
Работа выполнена в рамках государственного задания FMWE-2024-0028.
239
Проблемы прикладной гидрофизики
МЕЖГОДОВАЯ ИЗМЕНЧИВОСТЬ (1957−2005−2023 годов) СКОРОСТИ ЗВУКА
ЖЕЛОБОВ МАРИАНСКОГО И ТОНГА
К. П. Львов
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
INTERANNUAL VARIABILITY OF 1957−2005−2023 OF SPEED OF THE SOUND
OF TRENCHES MARIANA AND TONGA
K. P. Lvov
JSC «Concern «Oceanpribor », St. Petersburg, Russia
В работе рассмотрены расчетные оценки скорости звука по данным гидрологических станций 3689 и
3823 25 и 26 рейсов НИС «Витязь» в августе и декабре 1957 г. соответственно. Также приведены оценки
скорости звука по данным системы усвоения океанографических данных (СУОД) ГМЦ РФ на 18 августа
2023 г и 26 декабря 2023 г. и электронного атласа Мирового океана WOA18 для августа и декабря.
In work settlement estimates of speed of a sound according to hydrological stations 3689 and 3823 25 and 26 runs
NIS "Vityaz" in August and December, 1957 respectively are considered. Sound speed estimates according to
system of assimilation of oceanographic data, developed at the Hydrometeorological Center of Russia, for August
18, 2023 and on December 26, 2023 and the electronic atlas of the World Ocean Atlas (WOA18) for August and
December are also given.
Введение. Наиболее глубоководными желобами Мирового океана являются Марианский
и Тонга. Во время международного геофизического года в 1957 г. НИС «Витязь» выполнило
пионерские по приоритету, комплексные гидрологические исследования желобов [1−5].
Гидрологическая станция 3689 (18−21 августа 1957 г.) была проведена в Марианском желобе.
Данные станции приведены в [4] и содержат значения in situ температур в градусах Цельсия и
солености в промилле по глубину 9830 м. Станция 3823 (25−29 декабря 1957 г.) была проведена
в Тонга желобе по глубину 8820 м [5]. В [1−3] приведены температура, соленость и другие
гидрологические характеристики желобов. Наиболее полные данные имеются в рейсовых
отчетах, хранящихся в архиве института океанологии РАН.
В настоящее время общедоступны данные термохалинных полей системы усвоения
океанографических данных (СУОД) ГМЦ РФ на 18 августа 2023 г. и 26 декабря 2023 г. СУОД
определяется как технологическая реализация методологии получения наилучшей оценки
истинного состояния океанографических полей по данным всех доступных наблюдений с
использованием прогностической модели [6].
Общедоступный релиз World Ocean Atlas (WOA18) опубликован в июле 2019 г.
Термохалиннные данные с разрешением 0.25 гр., месячные наборы на 57 горизонтах (0, 5,…,1500
м) и сезонные (0, 5,…,1500, 1550, 1600,…,5500 м). Период 2005–2017 гг. по данным плавающих
буев АРГО (Global coverage of Argo floats from 2005–2017) [7].
Зависимости для Марианского желоба. На рис. 1 приведена зависимость ВРСЗ для
района максимальных глубин Марианского желоба. Значения потенциальной температуры
СУОД пересчитываются in situ температуру по уравнениям стандарта TEOS-10 [8]. Расчет
скорости звука произведен по формуле Дель Гроссо 1974 г, например, [9]. Среднегармоническое
значение определяется по следующей зависимости, например, [9]
_
cг =
zm
где zm — глубина согласно ВРСЗ, A = 2
, м/с,
A
∑ ( z − z ) (c + c ) ; с, zi — глубина, м; ci —
n
i
i =1
i −1
i
i −1
скорость звука, м/с. Расчеты среднегармонических значений произведено до глубины 5500 м.
240
Проблемы прикладной гидрофизики
Рис. 1. ВРСЗ до максимальных глубин
Ось ПЗК, скорость звука на оси, среднегармоническая скорость звука
СТ. 3689
СУОД
WOA18
Ось ПЗК, м
Скорость звука на оси, м/с
988
1484,5
1152
1484,9
1000
1484,8
Среднегармоническая скорость звука, м/с
1509,3
1509,6
1510,0
Таблица 1
Зависимости для Тонга желоба. На рис. 2 приведена зависимость ВРСЗ для района
максимальных глубин желоба Тонга.
Рис. 2. ВРСЗ до максимальных глубин
241
Проблемы прикладной гидрофизики
Ось ПЗК, скорость звука на оси, среднегармоническая скорость звука
Ось ПЗК, м
Скорость звука на оси, м/с
Среднегармоническая скорость звука, м/с
СТ. 3823
СУОД
WOA18
1214
1483,3
1510,3
1152
1483,8
1510,4
1200
1483,7
1510,5
Таблица 2
Заключение. Межгодовая изменчивость с 1957 г. по 2023 г. в августе скорости звука
Марианского желоба на поверхности примерно 1 м/с, наибольшая изменчивость на глубине
300 м примерно 3 м/с. Глубина подводного звукового канала 988−1152 м, скорость звука на оси
канала 1484,5–1484,9 м/с. Среднегармоническая скорость звука 1509,3−1510,0 м/с при расчете по
глубину 5500 м.
Межгодовая изменчивость в декабре скорости звука желоба Тонга на поверхности
примерно не более 3 м/с, наибольшая изменчивость на глубине 100 м примерно 8 м/с. Глубина
подводного звукового канала 1152−1214 м, скорость звука на оси канала 1483,3–1483,8 м/с.
Среднегармоническая скорость звука 1510,3−1510,5 м/с при расчете по глубину 5500 м.
Наибольший практический интерес представляют значения среднегармонических
скоростей звука при локации однолучевым эхолотом MS-26 глубоководных желобов
Марианского и Тонга во время рейсов НИС «Витязь».
Полученные результаты представляют определенный вклад в знание акустики океана и в
справочные сведения инженера−гидроакустика.
Литература
1. Беляев Г. М. Глубоководные океанические желоба и их фауна. М.: Наука, 1989.
2. Леонтьева В. В. Гидрология желобов Мирового океана. М.: Наука, 1985.
3. Научно-исследовательское судно «Витязь» и его экспедиции 1949 – 1979 гг. М.: Наука, 1983.
4. 25 рейс НИС «Витязь». Т. 2 отчета. Архив ИО РАН.
5. 26 рейс НИС «Витязь». Т. 3 отчета. Архив ИО РАН.
6. Вильфанд Р. М., Зеленько А. А., Реснянский Ю. Д. и др. Усвоение океанографических данных как
одна из ключевых задач оперативной океанологии // Гидроакустика. 2023. Вып. 53(1). С. 107–116.
7. https://data.nodc.noaa.gov/woa/WOA18/
8. http://www.TEOS‐10.org
9. Комляков В. А. Корабельные средства измерения скорости звука и моделирования акустических
полей в океане. СПб.: Наука, 2003.
Автор благодарит ИО РАН и конкретно З. В. Харламову за предоставленную возможность
ознакомится с рейсовыми отчетами НИС «Витязь».
242
Проблемы прикладной гидрофизики
ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА НА БАЗЕ
ГИДРОЛОГИЧЕСКОГО ЗОНДА ТИПА «ОЛД-1»
В. Н. Логачев, А. Ф. Мирончук, канд. техн. наук, К. А. Румянцев, А. С. Светличный
АО «Морские неакустические комплексы и системы», Санкт-Петербург, Россия
INTELLIGNENT SOUND VELOCITY MEASURING SYSTEM BASED
ON HYDROLOGICAL PROBE OF TYPE «OLD-1»
V. N. Logachev, А. F. Mironchuk, Ph.D., K. A. Rumyancev, A. S. Svetlichny
JSC «Marine non-acoustic complexes and systems», St. Petersburg, Russia
Рассмотрена интеллектуальная система измерения скорости звука, реализующая автоматический
контроль метрологической исправности, на основе многоканального гидрологического зонда типа «ОЛД1». Показано наличие у зонда необходимой совокупности признаков интеллектуальной измерительной
системы. Выполнено численное моделирование работы системы с использованием натурных
гидрофизических сигналов данных.
Intelligent sound velocity measuring system based on a multichannel hydrological probe of type «OLD-1» with
automatic self-diagnostic is considered. Results of a numeric modelling done with real-world data are presented.
Актуальность контроля метрологической исправности средств измерений. Средства
измерения скорости звука, используемые в исследованиях Мирового Океана в течение
межповерочного интервала, подвергаются интенсивным внешним воздействиям. Данные
воздействия могут привести к метрологическому отказу (выходу погрешности за границы
нормированных пределов) средства измерения до истечения его межповерочного интервала.
Также актуально увеличение межповерочного интервала для средств измерений
эксплуатирующихся в длительных научно-исследовательских экспедициях. Одним из путей
решения данных проблем является создание интеллектуальных измерительных систем с
функцией контроля метрологической исправности в составе самого средства измерений.
Государственными стандартами [1, 2] определена терминология в области интеллектуальных
датчиков и измерительных систем, а также методы метрологического самоконтроля.
В настоящем докладе рассмотрена интеллектуальная система измерения скорости звука на
основе многоканального гидрологического зонда типа «ОЛД-1» [3].
В соответствии с [1] интеллектуальная измерительная система может быть построена на
основе информационно-избыточных датчиков, подключенных к устройству обработки сигналов,
а также датчиков, измеряющих различные величины, связь между которыми в технологическом
процессе известна с требуемой точностью. В сочетании с программными средствами обработки
сигналов данная измерительная система может реализовывать поэлементный и комплектный
метрологический самоконтроль предусмотренный [2]. Структурная схема измерительной
системы показана на рис. 1.
Представленная на рис. 1 система имеет следующие измерительные каналы:
1. Канал относительной электрической проводимости C. Данный канал имеет опорное
значение - выходной код C0 аналого-цифрового преобразователя (АЦП), не равный нулю,
соответствующий нулевой проводимости и воспроизводимый в непроводящей среде (например,
при нахождении зонда на воздухе) это датчик с метрологическим диагностическим
самоконтролем по терминологии [1].
2. Канал температуры T. Данный канал не имеет опорного значения, но возможна его
коррекция по расхождению прямых и косвенных измерений скорости звука.
3. Канал избыточного гидростатического давления D. Данный канал имеет опорное
значение - выходной код D0, не равный нулю и воспроизводимый на поверхности моря (нулевое
избыточное давление) — это датчик с метрологическим диагностическим самоконтролем по
терминологии [1].
4. Канал прямого измерения скорости звука V. Данный канал не имеет опорного
значения, и является информационно-избыточным для выполняемых косвенных измерений
скорости звука V’, определяемой на основе прямых измерений по каналам C, T, D и
формулам [4].
243
Проблемы прикладной гидрофизики
Рис. 1. Гидрологический зонд ОЛД-1 и структурная схема
интеллектуальной измерительной системы на его основе
Рис. 2. Средние разности между прямыми и косвенными измерениями,
проведенными одним зондом в 2019 и 2021 гг.
На рис. 2 показаны средние значения разностей прямых и косвенных измерений,
выполненных одним зондом в 2019 и 2021 гг. В 27 из 29 зондирований разность прямых и
косвенных измерений не превышает 0,5 м/с т.е. меньше, чем нормированная погрешность
прямых измерений.
На рис. 3 показан вертикальный профиль скорости звука, содержащий характерную
неоднородность — скачок скорости звука на границе верхнего перемешанного слоя воды и
вызванную данной неоднородностью разность измеренной и расчетной скорости звука.
Важно отметить то, что результаты прямых измерений скорости звука не имеют
динамических искажений и содержат тонкую структуру. При проведении автоматического
контроля метрологической исправности средства измерений необходимо проводить
предварительную оценку динамики изменения сигналов данных подобных участков.
244
Проблемы прикладной гидрофизики
Рис. 3. Вертикальный профиль скорости звука
и профиль разности результатов прямых и косвенных измерений — ΔV
Рис. 4. Временная диаграмма работы зонда типа «ОЛД-1»
до и после возникновения признаков метрологического отказа
245
Проблемы прикладной гидрофизики
На рис. 4 приведены временные диаграммы работы гидрологического зонда при штатной
работе (желтый и зеленый участки) и при нештатной работе с признаками метрологического
отказа (красный участок, соответствующий подъему зонда).
Таким образом измерительный зонд типа «ОЛД-1» обладает необходимыми признаками
интеллектуальной измерительной системы и позволяет осуществлять контроль метрологической
исправности в рабочих условиях эксплуатации, что обеспечивает возможность увеличения
межповерочного интервала. По техническим и эксплуатационным характеристика зонд типа
«ОЛД-1» обеспечивает замещение импортных аналогов [3].
Литература
1. ГОСТ Р 8.673-2009 Государственная система обеспечения единства измерений. Датчики
интеллектуальные и системы измерительные интеллектуальные. Основные термины и определения. М.:
Стандартинформ, 2010.
2. ГОСТ Р 8.734-2011 Государственная система обеспечения единства измерений. Датчики
интеллектуальные и системы измерительные интеллектуальные. Методы метрологического самоконтроля.
М.: Стандартинформ, 2019.
3. Мирончук А. Ф., Румянцев К. А., Светличный А. С. Анализ результатов прямых и косвенных
измерений in situ скорости распространения звука в морской воде отечественным гидрологическим зондом
типа «ОЛД-1» и измерителем скорости звука miniSVP фирмы Valeport // Тр. Всерос конф. «Прикладные
технологии гидроакустики и гидрофизики». СПб.: Издательство «ЛЕМА», 2023. С. 410−413.
4. Feistel R. A Gibbs function for seawater thermodynamics for −6 to 80°C and salinity up to 120gkg–1 //
Deep Sea Research Part I: Oceanographic Research Papers. 2008. Vol. 55, № 12. P. 1639−1671.
246
Проблемы прикладной гидрофизики
КОРРЕЛЯЦИОННЫЕ СВЯЗИ КАВИТАЦИОННЫХ ПОРОГОВ
С ГИДРОЛОГИЧЕСКИМИ, ГИДРОФИЗИЧЕСКИМИ И ГИДРОХИМИЧЕСКИМИ
ПАРАМЕТРАМИ МОРСКОЙ ВОДЫ
Н. П. Мельников, канд. физ.-мат. наук
Волжский государственный университет водного транспорта, Нижний Новгород, Россия
CORRELATIONS OF CAVITATION THRESHOLDS WITH HYDROLOGICAL,
HYDROPHYSICAL AND HYDROCHEMICAL PARAMETERS OF SEAWATER
N. P. Melnikov, Ph.D.
Volga State University of Water Transport, Nizhny Novgorod, Russia
В статье приводятся коэффициенты корреляции величины кавитационных порогов морской воды с
температурой, соленостью, концентрацией кислорода, концентрацией азота, газосодержанием,
прозрачностью, концентрацией взвеси и с некоторыми элементами карбонатной системы.
Экспериментальные результаты получены в семи рейсах на научно-исследовательских судах ДВО РАН в
Атлантическом, Индийском и Тихом океанах. Анализ полученных результатов позволяет сделать вывод,
что существует устойчивая корреляционная связь величины кавитационных порогов с некоторыми
параметрами морской воды для глобальных масштабов. Для мезомасштабных районов устойчивая связь
отсутствует.
The article presents the correlation coefficients of the magnitude of the cavitation thresholds of seawater with
temperature, salinity, oxygen concentration, nitrogen concentration, gas content, transparency, suspension
concentration and with some elements of the carbonate system. Experimental results were obtained in seven
voyages on research vessels of the Far Eastern Branch of the Russian Academy of Sciences in the Atlantic, Indian
and Pacific Oceans. The analysis of the obtained results allows us to conclude that there is a stable correlation
between the magnitude of cavitation thresholds and some parameters of seawater for global scales. There is no
stable connection for mesoscale areas.
Присутствие зародышей кавитации в виде парогазовых пузырьков и твердых частиц
определяет величину кавитационной прочности жидкости [1]. Возникновение кавитации состоит
в развитии этих зародышей и превращении их в кавитационные полости в переменных полях
давления. Физические свойства жидкости, с одной стороны, определяют типы зародышей, их
концентрацию и распределение по размерам, а с другой — влияют на динамику их развития.
Исходя из такого подхода к проблеме кавитационной прочности морской воды проведены
экспериментальные исследования ее пространственной и временной изменчивости и выявлены
статистические
связи
с
различными
гидрофизическими,
гидрохимическим
и
гидробиологическими параметрами [2]. Все измерения величины кавитационных порогов
проведены по единой методике [3], а измерения гидрофизических, гидрохимических и
гидробиологических параметров выполнены сотрудниками ТОИ ДВО РАН им. В. И. Ильичева и
химического факультета МГУ по стандартным методикам. В табл. 1−9 представлены результаты
обработки измерений, полученных в различных районах Мирового океана. От широтных
разрезов (50°N до 50°S, табл. 1−2) до ограниченных по пространству районов (табл. 3−5), а также
на суточных станциях (табл. 6–9). Измерения проводились на разных глубинах от H=2 м до
H=70 м. Рассчитывались коэффициенты корреляции величины кавитационной прочности с
такими параметрами морской воды как: температура To C, соленость S‰, общее газосодержание
V, мл/л, концентрация кислорода O2, мл/л, кислотность pH, щелочность Alk, мг-экв/л,
прозрачность Alfa ,м-1, общее содержание неорганического углерода Σ CO2, ммоль/л, общее
содержание кальцита и магния CaMg, мг/л, концентрация фосфатов P, мг/л, азота N2, мл/л.,
концентрация мелкой взвеси Cм, концентрация крупной взвеси Ск, концентрация биовзвеси Сбио,
концентрация взвеси С, концентрация кальция Ca, кальций-хлорный коэффициент Ca/Cl,
концентрация свободной углекислоты CO2+H2CO3, ммоль/л, щелочно-хлорный коэффициент
Alk/Cl. Здесь r — коэффициент корреляции, Dr — достоверность коэффициента корреляции в
процентах (%).
247
Проблемы прикладной гидрофизики
Таблица 1
Наименование
Hм
2
5
10
15
20
25
30
V мл/л
r
Dr
r
Dr
r
Dr
r
Dr
-0,63
99,5
-0,84
99,5
0,86
99,5
0,69
99,5
-0,36
97,5
-0,43
99,5
0,53
99,5
0,42
99
-0,56
97,5
-0,40
95
0,49
95
0,34
95
-0,48
99
-0,32
90
0,40
97,5
0,34
95
-0,34
95
-0,37
95
0,34
90
0,35
95
-0,56
99,5
-0,66
99,5
0,59
99,5
0,54
99,5
-0,31
95
-0,84
99,5
0,42
97,5
O2 мл/л
To C
S‰
Таблица 2
H, м
Наименование
T°C
S, ‰
O2
N2
V
Alfa
10
r
D r, %
r
D r, %
г
D r, %
0,34
95
0,66
99,5
0,12
0,30
90
-0,53
97,5
-0,39
90
-0,48
97,5
-0,24
75
-0,35
90
-0,72
99,5
-0,37
75
-0,56
95
15
20
Таблица 3
H=10 м
T° С
S, ‰
r
D r, %
-0,02
-
0,52
99,5
V,
мл/л
-0,1
-
O2,
мл/л
0,06
-
N2,
мл/л
-0,29
90
C,
мг/л
-0,22
90
Cм,
см3 /м3
-0,18
75
Cк,
см3/м3
-0,18
75
Cбио,
мг/м3
-0,07
Таблица 4
H=15 м
T°С
S‰
Alk
Alk/Cl
O2
ΣCO2
CO2+H2CO3
Ca
Ca/Cl
r
D r, %
r
D r, %
r
D r, %
r
D r, %
r
D r, %
r
D r, %
r
D r, %
r
D r, %
r
D r, %
Район № 1
0,32
90
0,14
0,48
97,5
0,39
95
0,04
0,41
95
-0,39
95
0,51
90
0,5
90
Район № 2
-0,06
0,1
0,07
-0,06
0,11
0,16
0,22
0,1
0,65
95
248
Район № 3
-0,12
0,22
75
0,55
90
0,55
97,5
-0,16
0,22
75
-0,05
0,15
0,15
-
Район № 4
-0,34
75
-0,47
75
0,75
95
0,79
95
0,83
97,5
0,13
-
Проблемы прикладной гидрофизики
Таблица 5
H, м
ΣCO2
T°C
S, ‰
pH
Alk
r
0,45
0,43
0,28
0,06
0,084
0,004
0,14
0,49
0,57
Dr
98
95
80
-
-
-
-
95
99
10
r
0,16
0,15
0,14
0,09
-0,06
-0,12
-0,11
-0,17
-0,18
25
Dr
r
0,16
0,06
0,1
0,04
0,006
-0,39
0,06
-0,24
-0,24
50
Dr
r
0,11
0,18
0,58
-0,09
-0,35
95
-0,43
-0,04
80
-0,27
80
-0,09
70
Dr
r
0,02
0,008
99,9
-0,17
-0,35
-0,54
98
0,1
0,009
80
-0,23
0,004
Dr
-
-
-
98
99,9
-
-
-
-
5
V
NO2
PO4
Si
Таблица 6
ToC
S, ‰
pH
Alk
ΣCO2
0,66
95
0,08
0,27
0,4
0,58
0,5
80
0,097
H, м
5
V
NO2
PO4
Si
Alfa
0,39
-
0,14
-
0,65
95
-0,3
0,2
-0,3
0,69
95
0,08
0,69
95
-0,08
10
r
Dr
r
25
Dr
r
0,43
0,22
95
0,15
0,07
0,16
0,52
0,23
0,6
0,48
-0,412
Dr
r
80
0,69
0,03
0,11
0,33
0,11
90
0,16
0,19
95
50
80
0,68
80
-0,475
Dr
r
98
0,13
0,16
0,16
0,37
-
0,49
0,11
98
0,59
90
70
Dr
-
-
-
-
80
-
95
Таблица 7
Н, м
10
25
50
70
r
T°C
-0,7
S, ‰
0,5
pH
0,66
Alk
0,47
ΣCO2
0,26
O2
-0,46
N2
-0,5
V
0,14
Alfa
0,069
Dr
r
Dr
r
Dr
r
Dr
98
-0,07
-0,07
-0,67
95
80
0,16
0,16
0,04
-
95
0,14
0,14
0,25
-
80
-0,34
-0,34
-0,1
-
0,4
0,4
0,09
-
80
-0,14
-0,14
-0,52
80
80
-0,63
95
-0,63
95
-0,52
80
-0,63
95
-0,63
95
0,1
-
-
Статистическая связь кавитационной прочности с To C, S‰, O2 мл/л, N2, мл/л и V, мл/л для
широтных разрезов имеет значимые коэффициенты корреляции. Для отдельных, ограниченных
по размерам, районов имеет место большой разброс значений r, иногда от отрицательных до
положительных значений. Коэффициенты корреляции величин кавитационных порогов с
различными видами концентраций взвеси отрицательны с небольшой достоверностью порядка
75 % в отдельно взятом районе. Корреляционные связи величины кавитационной прочности с
параметрами карбонатной системы прослеживаются не во всех отдельно взятых районах. На
одних глубинах эта связь прослеживается, а на других глубинах она отсутствует.
Корреляционная связь величины кавитационной прочности с прозрачностью прослеживается на
одном широтном разрезе с достоверностью 75 % и 90 %. Для суточных станций достоверность
достигает 99,9 %.
249
Проблемы прикладной гидрофизики
Таблица 8
H, м
5
10
25
50
70
r
Dr
r
Dr
r
Dr
r
Dr
r
Dr
T°C
S, ‰
pH
Alk
ΣCO2
O2
N2
V
Alfa
NO2
Si
0,4
0,36
0,57
80
0,39
0,27
-
0,49
0,21
0,61
90
-0,55
80
-0,02
-
0,41
0,61
90
-0,64
90
-0,77
98
0,08
-
0,02
0,84
99
0,24
0,43,
0,07
-
0,28
-0,053
0,69
95
0,44
0,29
-
-0,25
-0,56
80
-0,38
-0,36
-0,2
-
-0,07
-0,56
80
0,36
-0,45
-0,11
-
-0,61
80
0,7
90
0,2
0,263
0,5
80
0,59
80
0,14
0,36
0,75
95
0,46
-
0,4
0,72
95
-0,41
0,21
0,91
99,9
-0,41
0,5
80
-0,35
-
Таблица 9
H, м
5
pH
Alk
ΣCO2
V
NO2
Si
Alfa
-0,693
95
-0,14
-0,313
0,41
0,6
90
0,318
0,361
80
-0,296
-
-0,136
0,35
0,29
0,38
-0,476
98
-0,157
-0,66
-0,35
0,153
0,375
-0,075
0,15
0,2
-0,467
95
0,24
0,004
0,165
90
-
0,45
0,42
98
-0,71
99,9
T°C
-0.61
90
S, ‰
10
r
Dr
r
25
Dr
r
50
Dr
r
70
Dr
r
-0,045
0,1
-0,18
0,238
0,484
-0,487
0,08
-0,44
Dr
-
-
-
-
98
95
-
-
0,11
-
В заключении можно сделать следующие выводы:
− усредненная глобальная изменчивость кавитационной прочности связана с
усредненными глобальными изменениями вышеперечисленных параметров;
− устойчивая корреляционная связь величины кавитационной прочности морской воды с
вышеперечисленными параметрами морской воды в отдельно взятых районах отсутствует.
Литература
1. Кнэпп Р., Дейли Дж., Хэммит Ф. Кавитация. М.: Мир, 1974.
2. Ильичев В. И., Елистратов В. П., Корец В. Л., Мельников Н. П. Моделирование изменчивости
кавитационной прочности морской воды // Докл. АН СССР. 1990. Т. 315, № 1. С. 206−209.
3. Гуленко И. И., Корец В. Л., Мальков В. В. Некоторые вопросы методики измерения
кавитационных порогов // Сб. «Симпозиум по физике акустогидродинамических явлений». Сухуми:
Наука, 1975. С. 35−39.
250
Проблемы прикладной гидрофизики
ИЗМЕНЕНИЕ ПОИСКОВОЙ ТРАЕКТОРИИ ДЕЛЬФИНА (TURSIOPS TRUNCATUS)
В ПРОЦЕССЕ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ДОННЫХ И ЗАИЛЕННЫХ
ОБЪЕКТОВ
А. В. Ахи
Институт эволюционной физиологии и биохимии им. И. М. Сеченова РАН, Санкт-Петербург, Россия
CHANGE IN DOLPHIN`S (TURSIOPS TRUNCATUS) SEARCH TRAJECTORY DURING
DETECTION AND IDENTIFICATION OF BOTTOM AND SILTED OBJECTS
A. V. Akhi
Sechenov Institute of Evolutionary Physiology and Biochemistry RAS, St. Petersburg. Russia
Исследовалось поведение дельфинов при локационном поиске, обнаружении и идентификации объектов,
находящихся на морском дне и под слоем морских осадков. Выявлено изменение траектории движения
животных на разных этапах усложнения задачи (при переходе от обнаружения цели к ее
идентификации). Дано объяснение изменения локационного поведения, которое вызвано необходимостью
получения максимальной информации об объекте поиска в условиях сильной донной реверберации.
Dolphin`s behavior was studied during location search, detection and identification of objects located on the
seabed and under a layer of marine sediments. The change in the movement trajectory of animals was discovered
at different stages of task complexity (during the transition from target detection to its identification).
The explanation is given for the change in location behavior which is caused by the need to obtain maximum
information about.
Гидролокационный поиск объектов, находящихся на морском дне или скрытых слоем
морских осадков достаточно сложен. Главную трудность при этом представляет сильная донная
реверберация, возникающая из-за прохождения локационного импульса через пограничную
среду (вода−дно) с разнообразными донными неоднородностями и неровностями. Донный грунт
обычно состоит из смеси песка, ракушечника, ила и различных камней. Все эти неоднородности
рассеивают и отражают локационный импульс и сами возбуждаются от его энергии. В результате
донные и заиленные объекты поиска находятся в области акустической маскировки. Интересно
посмотреть, как такую сложную гидроакустическую задачу решают такие эхолоцирующие
животные, как дельфины.
Заинтересованность в изучении их возможностей появилась после наблюдения [1] за их
охотой на зарывающуюся в песок рыбу. Первые практические исследования возможностей
дельфинов при поиске ими заиленных в грунте донных мин проводились на базе ВМС США
[2, 3] и продемонстрировали большую эффективность живого биосонара по сравнению с
техническими ГАС. Некоторые локаторы применяют дельфиноподобные локационные
импульсы, но благодаря тому, что сонар дельфина обладает высокой адаптивной способностью
к подстройке их спектрально-временных параметров в зависимости от постоянно меняющихся
условий локации, его эффективность оказывается в несколько раз выше. В нашей работе по
исследованию возможности обнаружения и идентификации дельфинами мишеней была оценена
вероятность правильного выбора на различных глубинах акватории: в толще воды (Р=1,00), у
поверхности (Р=0,85), на дне (Р=0,85) и в грунте (Р=0,80) [4]. Адаптация параметров
локационных сигналов в зависимости от места и условий эхолокации (в толще воды, в
приповерхностной и придонной областях) была рассмотрена в наших работах [5, 6] и показала,
как дельфин успешно преодолевает поверхностную и донную реверберацию при обнаружении
целей. Однако, при решении задачи более высокого уровня, а именно идентификации цели, в
нашем случае это было различение цели по материалу (сталь-латунь), кроме эхолокационной
адаптации, происходит еще и изменение поведения или стратегии поиска. Впервые описание
стратегии поиска дельфинами мишеней, имитирующих рыб и зарытых в кварцевый песок, при
которой они используют пошаговое сканирование дна, было дано в исследовании [7]. Изменение
стратегии поиска объекта при переходе к идентификации цели было зафиксировано нами в
работе [8]. Далее будет представлено и само изменение, и его смысл, что оно дает животному
для преодоления сложных условий выполнения задачи.
251
Проблемы прикладной гидрофизики
Рис. 1. Обнаружение и идентификация мишени , погруженной в грунт
С — место старта дельфина; М — мишень; α — угол наклона (скольжения) локационного луча; ẞ — угол падения
локационного луча; ХН1 − характеристика направленности локационного луча под углом скольжения α в процессе
неуверенного обнаружения; ХН2 — характеристики направленности локационного луча при уверенном обнаружении
при вращательном движении над мишенью
Эксперименты по поиску, обнаружению и идентификации мишеней, погруженных в грунт,
состоящий из песка, ракушечника и ила, проводились в свайно-сетевых вольерах морской бухты.
На двух дельфинах применялась поведенческая методика с пищевым подкреплением в условиях
их свободного плавания. Дельфин должен был обнаружить погруженную в грунт на 10 см
мишень и дифференцировать ее, выбирая стальную мишень, заданную, как положительную, и,
игнорируя латунную, заданную, как отрицательную. Стальная и латунная мишени имели одну
форму и размер — полые цилиндры высотой 120 мм, диаметром 100 мм, толщиной стенок 5 мм.
Предъявление мишеней происходило последовательно, установка мишеней происходила в
различных местах дна вольера. За правильный выбор положительной мишени животное
получало рыбу, выбор отрицательной мишени не подкреплялся. С момента старта до завершения
реакции производилась регистрация локационных сигналов и траектории дельфина.
Как показала регистрация траектории движения дельфина при поиске и обнаружении
погруженных в грунт объектов [8], происходит ее изменение сначала с линейной на круговую
(иногда эллипсовидную) над обнаруженной целью, затем начинается круговое сближение с
объектом по поверхности перевернутого конуса с вершиной в точке цели (рис. 1).
В основе объяснения этого явления лежит волнообразный эффект рассеяния донных
зондирований для различных углов наклона характеристики направленности (ХН) или
скольжений локационного сигнала к донной поверхности [9]. Максимум волны отражений для
определенных углов скольжений дает наибольшую маскировку цели. При частоте излучения в
области 20–30 кГц, а именно в нее дельфин смещает спектр своего импульса, помеха рассеяния
максимальна на угле наклона рострума дельфина в области значений 0°. 40°, 90° и минимальна
на угле наклона 20° и 60°.
Априорное неуверенное обнаружение объекта происходит на прямом проходе линейной
траектории. Для уверенного обнаружения дельфин возвращается и совершает несколько циклов
вращений вокруг цели с малым радиусом дистанции достоверного обнаружения. В общем виде
траектория циклов наблюдения — эллипс. Главная ось эллипса — проходы дельфина вдоль
экспериментального вольера, малая ось — развороты для обратного прохода. Однако, для
уверенной дифференцировки мишени по материалу дельфину по-прежнему не хватает
достаточной информации из-за сильной реверберационной помехи, затухания и рассеяния звука
при переходе из воды в грунт и обратно. Поиск оптимальных условий локации реализуется
вертикальным опрокидыванием вперед рострума дельфина (наклон ХН по вертикали). Движение
252
Проблемы прикладной гидрофизики
по конусовидной спирали позволяет производить зондирование цели под разными углами
скольжения ХН. Кроме того, такое движение удобно для того, чтобы иметь длительное время
принятия решения, не теряя акустический контакт с целью. Среднее время принятия решения
при таком зондировании составляет от полминуты до минуты. Увеличение этого времени
позволяет поднять ресурс наблюдения дельфина — помехоустойчивость. ХН имеет все больший
наклон относительно продольной оси животного. Дельфин наклоняется и «ныряет» ко дну,
касается дна вблизи цели. Излучение на min дистанции в слои вокруг мишени дает комплексное
отражение и по резонансным характеристикам отражения окончательно идентифицирует цель.
В гидроакустике при угловой зависимости обратного рассеяния применяются ХН
специальной формы с использованием в приемном тракте схем автоматической регулировки
усиления. Дельфин решает эту проблему поиском оптимальных точек локации под разными
углами скольжения ХН. Подобный круговой метод обследования пространства, как бионический
патент природы, можно рекомендовать при проектировании ГАС.
Литература
1. Rossbach K., Herzing D. Underwater observations of bentic-feeding bottlenose dolphins
(Tursiopstruncatus) near Grand Bahams Island, Bahams./ Marine Mammal Science. 1997. Vol. 13(3). P. 498−504.
2. Moore P. H. Mine-hunting dolphins of Navy Detection and Remediation Technologies for Mines and
minelike Targets // International Society for Optics and Photonics. 1997. Vol. 3079. Р. 2−6.
3. Martin S. N., Philips M., Bauer E. J., Moore P. H., Houser D. S. Instrumenting free-swimming dolphins
echolocating in open water // J. Acoust. Soc. Amer. 2005. Vol. 117(4). Pt. 1. Р. 2301−2307.
4. Zaitseva K. A., Korolev V. I., Akhi A. V., Krivchenko A. I., ButyrskiyE. Yu. Probability of underwater
target detection in the bottlenose dolphin (Tursiops truncatus) depending on target spatial coordinates // J. Evol.
Biochem. Physiol. 2018. Vol. 54(2). DOI: 10 1134/S0022093018020084.
5. Zaitseva K. A., Korolev V. I., Krivchenko A. I., Akhi A. V., Butyrskiy E. Yu. Dolphins (Tursiops truncatus)
are able to purposefully change the spectral and temporal parameters of echolocation signals // J. Evol. Biochem.
Physiol. 2019. Vol. 55(3). Р. 211−214. DOI: 10 1134/S0022093019030098.
6. Zaitseva K. A., Korolev V. I., Akhi A. V., Akhi A. A. Adaptation of dolphins (Tursiops truncatus) location
signals when searching for identifying objects hidden by sea sediments // Bioacoustics. 2021. Vol. 31(5).
Р. 535−544. DOI: 10. 1080/09524622.2021.1994467.
7. Dahl S. Target detection in coral sand by bottlenose dolphins (Tursiops truncatus) / Ed. M. Sc. Thesis
Biology Department Institute of Physics // Chemistry and Biology. Linchiping University. Sweeden. 2007.
8. Zaitseva K. A., Korolev V. I., AkhiA. V., Butyrskiy E. Yu. Detection of targets masked by marine
sediments in dolphins Tursiops truncates // J. Evol. Biochem. Physiol. 2020. Vol. 56(6). Р. 76−81. DOI:
10.31857/S004445292006011X.
9. Житковский Ю. Ю. Рассеяние звука дном океана. Акустика океана – современное состояние. М.
1982. С. 157−163.
Исследование выполнено на средства федерального бюджета по госзаданию на 2024 год
№ 075-00264-24-00.
253
МЕТОДЫ ПРИКЛАДНОЙ ГИДРОАКУСТИКИ
ПОТЕНЦИАЛЬНАЯ ПОМЕХОУСТОЙЧИВОСТЬ НИЗКОЧАСТОТНЫХ
ГИДРОАКУСТИЧЕСКИХ СИСТЕМ ШУМОПЕЛЕНГОВАНИЯ
А. Т. Трофимов1, д-р техн. наук, В. Н. Кравченко2, канд. техн. наук, О. А. Андреев2, канд. техн. наук,
О. И. Пискунова1, канд. техн. наук
1
Государственный университет «Дубна», Дубна, Россия
2
Филиал АО «АКИН», Дубна, Россия
POTENTIAL NOISE IMMUNITY OF LOW FREQUENCY HYDROACOUSTIC
PASSIVE SONAR
A. T. Trofimov1, Dr.Sc., V. N. Kravchenko2, Ph.D., O. A. Andreev2, Ph.D., O. I. Piskunova1 , Ph.D.
Dubna State University, Dubna, Russia
2
Dubna branch of JSC «AKIN», Dubna, Russia
1
Разработаны на основе анализа экспериментальных данных вероятностные модели многомодовых
сигналов, регистрируемых донными антеннами. Синтезированы согласованные по корреляциям
Винеровские оптимальные алгоритмы обработки сигналов с использованием собственных функций
корреляционных матриц случайных волновых процессов. Рассмотрены задачи обнаружения и оценки
пеленга морских объектов. На основе применения расхождения Кульбака получены оценки потенциальной
точности шумопеленгования морских объектов низкочастотными линейными стацинарными
системами.
Based on the analysis of experimental data the probabilistic models of multimodal signals detected by seabedplaced antennas have been developed. The Wiener optimal algorithms for signal processing consistent in
correlation have been synthesized using the eigenfunctions of correlation matrices of random wave processes. The
problems of detecting and estimating the bearing of marine objects were considered. The estimations of potential
accuracy of noise direction finding by low-frequency linear stationary systems are obtained by using Kullback
divergence.
Введение. Решение задачи анализа помехоустойчивости низкочастотных (НЧ)
стационарных гидроакустических систем (ГАС) шумопеленгования предполагает наличие
вероятностных моделей наблюдаемых случайных процессов. При наличии моделей задачи
синтеза алгоритмов решаются на основе применения функций правдоподобия с отысканием
достаточных статистик и апостериорных вероятностей. Анализ помехоустойчивости, если не
удаётся получить аналитического выражения, проводится путём имитационного компьютерного
моделирования.
Модели сигналов, регистрируемых антенной. Квазидетерминированный случайный
многомодовый волновой процесс, регистрируемый антенной, может быть представлен, при
допущении плоского фронта волн, в виде композиции нормальных волн (мод) [1]:
2∙𝜋𝜋
𝑖𝑖∙𝜑𝜑𝑚𝑚
𝑉𝑉(Θ, 𝑛𝑛, 𝑡𝑡) = ∑𝑀𝑀
∙ 𝑒𝑒 𝑖𝑖∙( 𝑁𝑁 ∙𝑃𝑃(Θ)∙𝑛𝑛) ∙ 𝑒𝑒 𝑖𝑖∙𝜔𝜔∙𝑡𝑡 ,
𝑚𝑚=1 𝐴𝐴0𝑚𝑚 ∙ 𝑒𝑒
𝑃𝑃(Θ) = 𝐿𝐿 ∙ cos (Θ)⁄𝜆𝜆𝑚𝑚 ,
𝜆𝜆𝑚𝑚 = 𝐶𝐶(𝐹𝐹, 𝑚𝑚)⁄𝐹𝐹 ,
(1)
(2)
(3)
где Θ — пеленг наблюдаемого морского объекта (МО); 𝑛𝑛 = 1 … 𝑁𝑁 — номер приёмника
(гидрофона) антенной системы; 𝜔𝜔 = 2𝜋𝜋 ∙ 𝐹𝐹, 𝐹𝐹 ∈ [𝐹𝐹н , 𝐹𝐹в ] — частоты излучаемого объектом
254
Методы прикладной гидроакустики
шумового сигнала; 𝐴𝐴0𝑚𝑚 и 𝜑𝜑𝑚𝑚 — амплитуда и начальная фаза нормальной (гармонической)
волны; 𝜆𝜆𝑚𝑚 — длина волны; 𝐶𝐶(𝐹𝐹, 𝑚𝑚) — фазовая скорость волн; m и М — номер моды и их
количество; 𝐿𝐿 ∙ cos (Θ) — размер проекции длины антенны 𝐿𝐿 на линию направления
распространения волн.
Опуская временной множитель 𝑒𝑒 𝑖𝑖∙𝜔𝜔∙𝑡𝑡 процесса 𝑉𝑉(Θ, 𝑛𝑛, 𝑡𝑡) как результат временной
обработки на интервале 𝑡𝑡 ∈ [0, 𝑇𝑇] на частотах 𝐹𝐹, представим волновой процесс в виде отсчётов
𝑉𝑉(Θ, 𝑛𝑛, 𝐹𝐹) в виде того же соотношения только с амплитудами 𝐴𝐴𝑚𝑚 = 𝐴𝐴0𝑚𝑚 ∙ 𝑇𝑇:
2∙𝜋𝜋
𝑖𝑖∙𝜑𝜑𝑚𝑚
𝑉𝑉(Θ, 𝑛𝑛, 𝐹𝐹) = ∑𝑀𝑀
∙ 𝑒𝑒 𝑖𝑖∙ 𝑁𝑁 ∙𝑃𝑃(Θ,𝑚𝑚)∙𝑛𝑛 .
𝑚𝑚=1 𝐴𝐴𝑚𝑚 ∙ 𝑒𝑒
(4)
Для совокупности параметров {𝐴𝐴𝑚𝑚 , 𝜑𝜑𝑚𝑚 , 𝐶𝐶(𝐹𝐹, 𝑚𝑚), 𝜃𝜃}, 𝑚𝑚 = 1. . 𝑀𝑀, отметим, что что они могут
быть и случайными, и неизвестными, и варьируемыми. Пеленг 𝜃𝜃 для движущегося объекта
является функцией скорости и угла направления движения объекта. Случайный волновой
процесс, представленный в виде композиции нормальных волн (4), назван нами волновым
пакетом (ВП) (рис. 1).
В качестве вероятностной модели многомодового волнового процесса 𝑉𝑉(Θ) предлагается
использовать модель в виде случайного процесса с корреляционной матрицей узкополосного
случайного процесса 𝑅𝑅𝑅𝑅(Θ).
Используем представление матрицы 𝑅𝑅𝑅𝑅(Θ) в виде разложения по системе собственных
функций 𝜓𝜓(𝑘𝑘, Θ) (5), тогда случайный волновой процесс 𝑉𝑉(Θ) может быть описан в виде ряда
(6):
𝐾𝐾−1
𝑅𝑅𝑅𝑅(Θ) = ∑𝑘𝑘=0
𝜆𝜆𝑘𝑘 ∙ 𝜓𝜓(𝑘𝑘, Θ) ∙ 𝜓𝜓(𝑘𝑘, Θ)𝑇𝑇 ;
(5)
𝐾𝐾−1
𝑉𝑉(Θ) = ∑𝑘𝑘=0
𝑆𝑆𝑘𝑘 (𝛩𝛩) ∙ 𝜓𝜓(𝑘𝑘, Θ).
(6)
В обобщённом виде случайный вектор 𝑆𝑆𝑘𝑘 (𝛩𝛩) для негауссовских процессов может быть
представлен полигауссовской вероятностной моделью [2]. Отметим, что имитация реализаций
𝑉𝑉(Θ) по соотношению (4) адекватно представима по соотношениям (5, 6).
Алгоритмы обработки волнового пакета для решения задачи обнаружения и оценки
пеленга наблюдаемого объекта. Представим наблюдаемый волновой пакет как аддитивную
смесь 𝑉𝑉(Θ) и 𝑍𝑍 — волнового пакета шумов среды:
𝑍𝑍𝑍𝑍 = 𝑉𝑉(𝛩𝛩0) + 𝑍𝑍.
(7)
𝐺𝐺𝐺𝐺 = 𝑍𝑍𝑍𝑍 𝑇𝑇 ∙ (𝑊𝑊(𝛩𝛩) ∙ 𝑍𝑍𝑍𝑍 ∗ ),
(8)
Используя для обработки случайного ВП логарифм отношения правдоподобия,
реализуемый в виде согласованного фильтра второго рода (Миддлтон), в самом общем виде
получим следующий алгоритм для получения достаточной статистики:
где 𝑊𝑊(𝛩𝛩) = ∑𝐾𝐾
𝑘𝑘=0
𝜆𝜆𝜆𝜆(𝛩𝛩)𝑘𝑘
∙ 𝜓𝜓𝑘𝑘 (𝛩𝛩) ∙ 𝜓𝜓𝑘𝑘 (𝛩𝛩)𝑇𝑇
𝜆𝜆𝜆𝜆(𝛩𝛩)𝑘𝑘 +𝜆𝜆0
есть оператор фильтра Винера, где 𝜆𝜆𝜆𝜆(𝛩𝛩)𝑘𝑘 ;
𝜆𝜆0 — собственные значения в разложении корреляционных матриц сигнала и шума [3].
Рис. 1. Графики реализаций волнового пакета (𝐹𝐹 = 20 Гц, Θ = 5°)
255
Методы прикладной гидроакустики
Рис. 2. Оценки потенциальной точности (графики σΘ𝑖𝑖 и σFΘ𝑖𝑖 совпадают) в сравнении с
оценками σSF𝑖𝑖 по результатам компьютерного моделирования алгоритмов
Из соотношения (8) могут быть получены частные случаи алгоритмов для одномодового
волновода: согласованная обработка 1-го рода (match field) 𝐿𝐿𝐿𝐿(𝛩𝛩) = 𝑅𝑅𝑅𝑅(𝑍𝑍𝑍𝑍 𝑇𝑇 ∙ 𝑉𝑉(𝛩𝛩)∗ ), где
𝑉𝑉(𝛩𝛩)∗ = 𝜓𝜓0 (𝛩𝛩); алгоритм с вектором компенсации 𝑄𝑄𝑄𝑄(𝛩𝛩) = |𝑍𝑍𝑍𝑍 𝑇𝑇 ∙ 𝑉𝑉(𝛩𝛩)∗ |2 , где 𝑉𝑉(𝛩𝛩)∗ = 𝜓𝜓0 (𝛩𝛩).
В качестве примера анализа потенциальной точности пеленгации использованы
соотношения Рао-Крамера [4] (9) и мера расхождения Кульбака [5] для оценок пеленга на основе
согласованного фильтра 2-го рода (10):
𝑌𝑌(𝛩𝛩, ∆𝛩𝛩) =
1
𝑇𝑇
1
∙ �𝑉𝑉(𝛩𝛩) − 𝑉𝑉(𝛩𝛩, ∆𝛩𝛩)� ∙ (𝑉𝑉 ∗ (𝛩𝛩) − 𝑉𝑉 ∗ (𝛩𝛩, ∆𝛩𝛩)),
𝜎𝜎02
𝐽𝐽(𝛩𝛩, ∆𝛩𝛩) = 2 ∙ 𝑡𝑡𝑡𝑡 �𝑅𝑅𝑅𝑅(𝛩𝛩 + ∆𝛩𝛩) ∙ �𝑅𝑅𝑅𝑅(𝛩𝛩)�
−1
+ �𝑅𝑅𝑅𝑅(𝛩𝛩 + ∆𝛩𝛩)�
−1
(9)
∙ 𝑅𝑅𝑅𝑅(𝛩𝛩)� − 𝑁𝑁. (10)
Для дисперсий оценок пеленга по Рао-Крамеру и из соотношения Кульбака получены выражения
(11) и (12) соответственно:
𝑤𝑤
𝑐𝑐
𝐷𝐷𝐷𝐷(𝛩𝛩) = 24/𝑞𝑞 ∙ ( ∙ sin (𝛩𝛩) ∙ 𝐿𝐿)2 ,
𝐷𝐷(𝛩𝛩) = |∆𝛩𝛩|2 ⁄(𝐽𝐽(𝛩𝛩, ∆𝛩𝛩)/2).
(11)
(12)
На графиках рис. 2 представлены оценка потенциальной точности σΘ𝑖𝑖 =�DΘ𝑖𝑖 и σFΘ𝑖𝑖 =�𝐷𝐷𝐷𝐷(Θ𝑖𝑖 )
в сравнении с оценками СКО σSF𝑖𝑖 на основе имитационного моделирования.
Выводы. По полученным результатам можно отметить некоторые общие выводы
относительно ошибок оценивания пеленга. Дисперсии оценок пеленга обратно
пропорциональны соотношению сигнал/шум 𝑞𝑞, значениям частот 𝐹𝐹, длительности интервала
времени наблюдения T и значению длины антенны 𝐿𝐿3 .
Литература
1. Исакович М. А. Общая акустика. М.: Наука, 1973.
2. Трофимов А. Т. Полигауссовские вероятностные модели и синтез информационных систем.
НовГУ им. Ярослава Мудрого. Великий Новгород. 2002. 183 с.
3. Трофимов А. Т. Синтез оптимального алгоритма пространственной обработки случайного
волнового пакета, принимаемого на низкочастотную антенну в мелком море // Тр. Всерос. конф.
«Прикладные технологии гидроакустики и гидрофизики». СПб.: Издательство «ЛЕМА», 2023. С. 305−308.
4. Ван Трис. Г. Теория обнаружения, оценок и модуляции // Теория обнаружения, оценок и
линейной модуляции. Т. 1 / Пер. с англ., под ред. проф. В. И. Тихонова. М., «Советское радио», 1972. 744 с.
5. Кульбак С. Теория информации и статистика / Пер. с английского; под ред.
акад. А. Н. Колмогорова. М.: Наука, 1967.
256
Методы прикладной гидроакустики
К ВОПРОСУ О ПРАКТИЧЕСКОЙ ЭФФЕКТИВНОСТИ МЕТОДОВ
ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛОВ, ОСНОВАННЫХ НА МОДЕЛИ
СРЕДЫ РАСПРОСТРАНЕНИЯ ЗВУКА В КАНАЛАХ МЕЛКОГО МОРЯ
А. И. Малеханов1,2, канд. физ.-мат. наук, А. В. Смирнов1
1
Институт прикладной физики РАН, Нижний Новгород, Россия
2
ННГУ, Нижний Новгород, Россия
ON THE PRACTICAL EFFICIENCY OF THE MODEL-BASED ARRAY SIGNAL
PROCESSING IN SHALLOW–WATER SOUND CHANNELS
А. I. Malekhanov1,2, Ph.D., A. V. Smirnov1
1
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
2
Lobachevsky University, Nizhny Novgorod, Russia
В докладе представлены результаты сравнительного анализа нескольких «согласованных со средой»
методов пространственной обработки полезного сигнала на фоне интенсивной помехи и морских шумов,
включая метод оптимальной обработки, в реалистичных условиях рассогласования модели среды по
параметрам гидрологии и подстилающего дна (на примере вертикальной антенны в канале Баренцева
моря). Демонстрируется существенное различие эффективности методов как в условиях точного
согласования, так и при ошибках в оценке параметров канала.
We present the results of comparative study of several model-based techniques of array processing of a useful
signal against the background of intense interference and ambient sea noise, including the optimal technique,
under realistic conditions of the environmental model mismatch in the sound-speed profile and the underlying
bottom parameters (using the example of a vertical array in a channel from the Barents Sea). A significant
difference in their effectiveness in terms of the array gain is demonstrated both in conditions of exact matching
and in the case of errors in estimating channel parameters.
Введение. В пленарном докладе на предыдущей конференции [1], кратко освещалось
состояние исследований в области согласованной со средой обработки сигналов в
гидроакустике. В данной работе представлены результаты, которые развивают положения того
доклада с акцентом на влиянии частичной априорной неопределенности модели канала
распространения сигналов на эффективность их пространственной обработки в антенных
решетках (АР). Цель доклада — на конкретном модельном примере приема/обработки сигналов
с помощью вертикальной АР, размещенной в канале Баренцева моря, показать, как именно
погрешности в оценке параметров канала (включая профиль скорости звука и параметры дна)
влияют на величину антенного выигрыша. Эта величина, которая стандартно определяется нами
как коэффициент усиления АР по величине отношения сигнал/(шум + помеха) (ОСШП),
характеризует эффективность АР как пространственного фильтра полезного сигнала на фоне
аддитивных помех и, тем самым, — возможности достоверного обнаружения источника сигнала
при малых значениях ОСШП на входе АР.
Постановка задачи моделирования. В целом, постановка задачи и основные
приближения следуют недавним работам [2, 3]. Моделирование проводится для условий
распространения низкочастотных сигналов (в диапазоне первых сотен Гц) в канале Баренцева
моря с гидрологией летнего типа, в качестве модели дна рассматривается модель однородного
жидкого полупространства. Для расчетов звуковых полей используется стандартное модовое
приближение, согласно которому звуковые поля отдельных источников представляются в виде
суммы конечного числа нормальных волн (мод) с дискретным спектром волновых чисел.
Предполагается, что вертикальный профиль скорости звука (ВПСЗ) в водной толще и
геоакустические параметры дна известны не точно, но с произвольными отклонениями от их
опорных значений — тех значений, которые используются для расчета реплик полезного
сигнала, помехи и корреляционной матрицы шума на входе АР в «идеальных» условиях точного
согласования. Интервалы указанных отклонений характеризуют уровень априорной
неопределенности модели канала и являются переменными величинами, в зависимости от
которых рассчитываются величины антенного выигрыша в «реальных» условиях. Важно, что
моделирование в такой постановке дает возможность количественной оценки требований к
257
Методы прикладной гидроакустики
средствам оперативной океанографии как инструментам поддержки эффективного
функционирования гидроакустических антенных систем.
Сравнительно анализируются три метода обработки: обработка, согласованная с репликой
полезного сигнала; обработка, согласованная с репликой только одной из мод, формирующих
полезный сигнал; оптимальная (по величине выходного ОСШП) обработка. Эффективность
методов характеризуется не только величинами выигрыша АР в условиях точного согласования,
но и тем, какие величины выигрыша достигаются в условиях рассогласования по тем или иным
параметрам среды, т.е. в реальных условиях работы АР. В этом смысле мы понимаем их
«практическую эффективность».
На рис. 1 показаны опорный ВПСЗ (построен по 32-м точкам измерений — рис. 1, а) и его
случайные вариации, обусловленные двумя различными механизмами природной изменчивости:
вариациями температуры на границе раздела с приводным слоем атмосферы (рис. 1, б) и
вариациями температуры в случайном поле внутренних волн (рис. 1, в). Для первого из них
эвристически задается монотонное уменьшение интервала вариаций с глубиной, для второго —
локализация вариаций в области термоклина. На рис. 1, а показаны также положения источников
сигнала (S), помехи (N) и приемной АР по глубине (состоит из 13 гидрофонов, расположенных
эквидистантно через 8,5 м в среднем интервале глубин). Опорные параметры дна: плотность
ρb=1,8 г/см3, скорость звука cb = 1750 м/с, декремент затухания звука 0,07 дБ/км∙Гц.
Источник полезного сигнала на частоте 240 Гц задавался на различных глубинах 40, 80,
120 м, источник помехи — на глубине 10 м, расстояния от АР до обоих источников выборочно
задавались в интервале от 10 до 30 км. Отношение интенсивностей сигнала и помехи на входе
АР задавалось на уровне –10, –20 дБ. Фоновый шум моря моделировался на основе модели
модового шума ветрового происхождения [4]. К фоновому шуму среды сигнал также имел
разный уровень интенсивности до –20 дБ, что отвечает разной интенсивности волнения.
Интенсивности всех принимаемых сигналов нормированы на уровень собственного шума АР,
который задавался как пространственно-белый шум с единичной корреляционной матрицей.
В соответствии с такой нормировкой, «иерархия» сигналов полезного сигнала, помехи и шума
среды варьировалась в безразмерном виде, например, 1:10:100:100.
Результаты моделирования. В рамках заданной постановки, принимаемые звуковые
поля представляют собой многомодовые сигналы, но имеют существенно различные модовые
составы (спектры). Это дает возможность достижения высоких значений выигрыша АР путем
пространственной (модовой) фильтрации полезного сигнала, которая оказывается тем
эффективнее, чем сильнее модовый спектр сигнала отличен от модовых спектров интенсивной
помехи и шума.
а
б
в
Рис. 1. Опорный ВПСЗ и его случайные вариации (пояснения в тексте)
258
Методы прикладной гидроакустики
а
б
Рис. 2. Антенный выигрыш в зависимости от вариаций ВПСЗ для согласованной с полем сигнала
обработки, согласованной фильтрации 2-ой моды, оптимальной обработки
ВПСЗ для согласованной с полем сигнала обработки — кривые 1; согласованной фильтрации 2-ой моды —
кривые 2; оптимальной обработки — кривые 3; верхние кривые для каждого метода отвечают вариациям ВПСЗ в
поле внутренних волн, нижние — поверхностным вариациям; отношение интенсивностей сигналов на входе АР:
а — 1:10:100:0; б — 1:10:100:100; горизонтальная штриховая прямая отвечает выигрышу АР,
равному числу ее элементов (11 дБ)
Здесь мы приводим только одну иллюстрацию, демонстрирующую наиболее
«влиятельный» физический механизм рассогласования, связанный с изменчивостью ВПСЗ.
Пример показан на рис. 2 для обеих моделей такой изменчивости. Отметим, что вариации на
уровне ~5 м/с отвечают вариациям температуры ~1 °C на морской поверхности или в поле
внутренних волн с амплитудами до ~6 м (для значений градиента в области термоклина, которые
отвечают опорному ВПСЗ).
Выводы. Практическая эффективность основанных на модели среды методов
пространственной обработки сигналов в каналах мелкого моря может быть сильно различной в
условиях частичной неопределенности модели среды по различным ее параметрам, поскольку
они обладают существенно разным уровнем устойчивости в таких условиях. В особой степени
этот общий вывод относится к наиболее вариативной характеристике подводного канала — полю
скорости звука.
Литература
1. Малеханов А. И., Коваленко В. В., Никитин Д. А., Сазонтов А. Г., Сергеев В. А. Согласованная
со средой обработка акустических сигналов в подводных звуковых каналах: состояние исследований,
оценки эффективности, перспективы // Тр. Всеросс. конф. «Прикладные технологии гидроакустики и
гидрофизики». СПб.: Изд. «ЛЕМА», 2023. С. 17−23.
2. Малеханов А. И., Смирнов И. П. Пространственная обработка акустических сигналов в каналах
мелкого моря в условиях априорной неопределенности: оценки потерь эффективности // Акуст. журн.
2022. Т. 68, № 4. С. 427−439.
3. Малеханов А. И., Смирнов А. В. Влияние априорной неопределенности модели звукового
канала мелкого моря на коэффициент усиления вертикальной антенной решетки // Акуст. журн. 2023.
Т. 69, № 5. С. 542−558.
4. Kuperman W. A., Ingenito F. Spatial correlation of surface generated noise in a stratified ocean // J.
Acoust. Soc. Am. 1980. Vol. 67, № 6. P. 1988–1996.
Работа выполнена при поддержке РНФ по гранту № 20-19-00383.
259
Методы прикладной гидроакустики
МЕТОДЫ ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ ЧАСТИЧНО-КОГЕРЕНТНЫХ
МНОГОМОДОВЫХ СИГНАЛОВ В КАНАЛЕ МЕЛКОГО МОРЯ С ПОМОЩЬЮ
ВЕРТИКАЛЬНОЙ АНТЕННОЙ РЕШЕТКИ: ЭВРИСТИЧЕСКИЕ ОЦЕНКИ
ЭФФЕКТИВНОСТИ
А. И. Малеханов1,2, канд. физ.-мат. наук, А. В. Смирнов1
1
Институт прикладной физики РАН, Нижний Новгород, Россия
2
ННГУ, Нижний Новгород, Россия
SPATIAL PROCESSING OF PARTIALLY COHERENT MULTI-MODE SIGNALS
IN A SHALLOW-WATER SOUND CHANNEL USING A VERTICAL ARRAY:
HEURISTIC EFFICIENCY ESTIMATES
А. I. Malekhanov1,2, Ph.D., A. V. Smirnov1
1
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
2
Lobachevsky University, Nizhny Novgorod, Russia
Представлены результаты численного моделирования ряда методов пространственной обработки
частично-когерентного многомодового сигнала на фоне интенсивных модовых шумов в канале мелкого
моря при вертикальном размещении антенной решетки. Основное внимание уделено вопросу о выборе
методов, близких к оптимальному методу по величине выходного отношения сигнал/шум, но более
простых в своей реализации, в зависимости от модового состава сигнала и положения антенны по
глубине канала. Показано, что одним из таких квазиоптимальных методов обработки является метод
некогерентной модовой фильтрации при условии адаптивной оценки помехоустойчивых мод сигнала.
In this paper we show results of numerical simulation of spatial processing techniques of a partially coherent
multimode signal against the background of intense mode noise in a shallow-water channel with a vertical array
placement are presented. The main attention is paid to the issue of choosing techniques that are close to the
optimal method in terms of the output signal-to-noise ratio, but simpler in their implementation, depending on the
mode composition of the signal and the position of the array along the channel depth. It is shown that one of these
quasi-optimal processing techniques is the method of incoherent mode filtering, subject to adaptive assessment of
noise-resistant signal modes.
Введение. Как известно при дальнем распространении многомодовых сигналов в
подводных звуковых каналах на эффективность работы вертикальной линейной приемной
антенной решетки (АР) влияет огромное число физических факторов: параметры канала,
характеристики источников полезного сигнала и помех/естественных шумов океана, выбранныe
методы обработки входных сигналов, и, конечно, параметры приемной системы. К таким
параметрам можно отнести и размещение элементов АР в толще канала. Предполагая, что
полезный сигнал и фоновый шум среды на входе АР формируются определенным набором мод
звукового поля в канале мелкого моря [1], и считая, что их модовый спектр интенсивности при
достаточно долгом наблюдении сохраняется, правильно определенное расположение антенны в
канале может повысить ее эффективность. Так, изменение положения элементов сильно влияет
на прием мод, способность антенны к выделению моды, разделение модовых спектров
шума/помехи и полезного сигнала [2]. Иными словами, двигая ее элементы по вертикали в
канале, изменяется степень ортогональности принимаемых мод. Этот эффект начинает особенно
сильно влиять на эффективность работы АР в случае изначально разделенных модовых спектров
сигнала и шума [3]. Работа посвящена анализу влияния размещения вертикальной АР в канале
мелкого моря, при заданном входном отношении сигнал/шум (ОСШ), на эффективность методов
пространственной обработки.
Постановка задачи. В качестве критерия эффективности обработки сигналов мы
рассматриваем величину коэффициента усиления G (антенного выигрыша) по величине
отношения выходного ОСШ q к входному ОСШ q0. Опираясь на известные положения теории
пространственной обработки сигналов, мы используем для расчетов общие выражения для
выигрыша G в случае линейной и квадратичной обработки [4]:
260
Методы прикладной гидроакустики
Sp ( WW + R S )
w + RSw
q
=
=
G =
, qлин
, qкв
w + R Noise w
q0
Sp ( WW R Noise )
+
2
.
(1)
Здесь R S = S*S T , R Noise = I + R N — матрицы когерентности сигнала и шума (изотропного и
модового шума), соответственно (I — единичная матрица), w — весовой вектор, задаваемый на
АР; W — весовая матрица, состоящая из нескольких (более одного) весовых векторов; Sp(…) —
след матрицы; верхний индексы "+", "*", "T" и скобки <…> означают операции эрмитово
сопряжения, комплексного сопряжения, транспонирования и статистического усреднения
соответственно. Конкретизируя метод обработки путем выбора весового вектора или весовой
матрицы, мы получаем величину критерия его эффективности при заданных (модельных или
эмпирических) матрицах когерентности полей на входе АР, что позволяет оценить зависимость
от параметров задачи и количественно сравнить методы между собой. В работе мы анализируем
следующие методы пространственной обработки [2−6]: метод модовой фильтрации [2, 3, 6];
методы оптимальной линейной и квадратичной обработки, обеспечивающие максимум
выигрыша для линейной и квадратичной [4] обработки соответственно; метод некогерентной
модовой фильтрации [5].Соответствующие значения выигрыша АР обозначены как G1,…, G4.
Для демонстрации работы антенны как модового фильтра в условиях дальнего
распространения сигнала весовой вектор разложим по модам волновода w=Uf, где U — матрица
модовой структуры поля на входе АР, где i-ый столбец отвечает распределению i-ой моды в
точках закрепления элементов АР в канале, f — вектор, определяющий модовый спектр весового
вектора. Выходное ОСШ в случае действительной матрицы U для методов модовой фильтрации
qm и некогерентной модовой фильтрации qJ (где J — число накапливаемых мод, считая от первой)
будет:
J
eTmQM SQe m
=
qm =
, qJ
eTmQe m + eTmQM N Qe m
∑ α e QM Qe
j =1
j
T
j
S
j
2
J
∑ α α e Qe + e QM Qe
i , j =1
i
j
T
j
i
T
j
N
,
(2)
i
где MS, MN — матрицы межмодовых корреляций сигнала и модового шума соответственно; ei —
единичный вектор, выделяющий i-ую моду; αi — весовой коэффициент i-го парциального канала
обработки; Q=UUT — матрица взаимной ортогональности модовых векторов на элементах АР.
Результаты моделирования. При моделировании канала мелкого моря взяты натурные
измерения профиля скорости звука Баренцева моря в летний сезон (рис. 1) [6]. В качестве
опорной модели антенны была выбрана эквидистантная придонная 12 элементная АР с
межэлементным расстоянием d=λ⁄2, где λ=6,1 м — длина волны при рабочей частоте f=240 Гц, а
число распространяющихся мод M=28. Рассматривается прием слабого низкомодового сигнала
от удаленного источника на фоне мощных высокомодовых шумов мелкого моря (входное ОСШ
−30 дБ) [7].
Здесь в работе проиллюстрирована лишь зависимость выигрыша (рис. 1) от номера моды
m (для модовой фильтрации) или от числа парциальных каналов J=m (для некогерентной
модовой фильтрации — считая от первой моды) в случае разного числа элементов придонной
АР (N=12 и 24). Максимальные значения выигрыша для модовой фильтрации на разных номерах
мод m обусловлены высокой степенью ортогональности этих мод с номерами мод, где
локализован интенсивный модовый шум и низкой степенью ортогональности с номерами
сигнальных мод [2]. При этом более длинная АР лучше «ортогонализирует» моды, что повышает
значения G1, но при этом увеличиваются потери усиления G1/N. Выигрыш для некогерентной
модовой фильтрации получает дополнительный выигрыш от каждого последующего модового
отклика, при этом число каналов обработки J может быть заранее определено для заданного
входного спектра сигнала и шума. При размещении источников сигнала и помехи в толще канала
их модовый спектр может быть достаточно «изрезанным» и максимальный выигрыш G4
достижим при выборе лишь групп мод с высоким входным ОСШ.
261
Методы прикладной гидроакустики
а
б
Рис. 1. Выигрыш АР (а) как функция настройки на номер моды для G1 (кривые с точками) и числа
каналов обработки для G4 (сплошные кривые) при разном числе элементов АР размещенной в канале (б)
Одним цветом обозначены одинаковые сценарии размещения АР
и соответствующие им величины выигрыша G2 и G3
Выигрыши для оптимальной обработки слабо отличаются друг от друга из-за наличия
одной (для N=12) или четырех (N=24) сильных когерентных компонент входного сигнала.
Рассмотренные сценарии размещения элементов АР в докладе приводят к вопросу о поиске
оптимального размера и положения АР, что является вариационной многопараметрической
задачей, которая, вероятно, не имеет единственного решения. Тем не менее, соответствующие
оценки могут быть сделаны на основе моделирования.
Заключение. Таким образом, в работе показано существенное влияние положения и числа
элементов АР в многомодовом подводном канале на антенный выигрыш для ряда методов
обработки сигналов. При известном и достаточно устойчивом модовом составе шумов можно
априори оценить помехозащищенность различных мод, определить группу мод с наиболее
высокими значениями модовых ОСШ и для нее оптимизировать расположение АР для
достижения ее максимального выигрыша. Методы модовой фильтрации и некогерентной
модовой фильтрации могут оцениваться как эффективные квазиоптимальные методы при
корректном выборе наиболее помехоустойчивых мод.
Литература
1. Кацнельсон Б. Г., Петников В. Г. Акустика мелкого моря. М.: Наука, 1997. 189 с.
2. Labutina M. S., Malekhanov A. I., Smirnov A. V. Estimation of the efficiency of the vertical antenna
arrays in underwater sound channels // Physics of Wave Phenomena. 2016. Vol. 24, № 2. P. 161−167.
3. Smirnov A. V., Malekhanov A. I., Labutina M. S. Vertical array gain in a randomly inhomogeneous
underwater sound channel: Effect of the array arrangement // Proc. Meet. Acoust. (POMA). 2021. Vol. 44.055005
P. 1–12.
4. Малеханов А. И., Таланов В. И. Об оптимальном приеме сигналов в многомодовых волноводах //
Акуст. журн. 1990. Т. 36, № 5. С. 891−897.
5. Малеханов А. И. Некогерентная пространственная фильтрация мод в случайно-неоднородном
океаническом волноводе // Акуст. журн. 1992. Т. 38, № 5. С. 898−904.
6. Малеханов А. И., Смирнов А. И. К вопросу о практической эффективности методов
пространственной обработки сигналов, основанных на модели среды распространения звука в каналах
мелкого моря // Тр. всерос. конф. «Прикладные технологии гидроакустики и гидрофизики». 2023.
В печати.
7. Kuperman W. A., Ingenito F. Spatial correlation of surface generated noise in a stratified ocean // J.
Acoust. Soc. Am. 1980. Vol. 67, № 6. P. 1988–1996.
Работа выполнена при поддержке РНФ по гранту № 20-19-00383.
262
Методы прикладной гидроакустики
ЛОКАЛИЗАЦИЯ НЕСКОЛЬКИХ ДВИЖУЩИХСЯ ИСТОЧНИКОВ ЗВУКА
С ПОМОЩЬЮ НЕКОГЕРЕНТНОГО АПЕРТУРНОГО СИНТЕЗА
С ОДНОВРЕМЕННЫМ ПОДАВЛЕНИЕМ ПОМЕХ
А. А. Родионов, канд. физ.-мат. наук
Институт прикладной физики РАН, Нижний Новгород, Россия
LOCALIZATION OF MULTIPLE MOVING SOUND SOURCES USING INCOHERENT
APERTURE SYNTHESIS WITH SIMULTANEOUS INTERFERENCE SUPPRESSION
A. A. Rodionov, Ph.D.
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
В работе рассмотрена задача оценки положения нескольких движущихся источников шума с помощью
движущейся приемной системы. Подобная задача ранее решалась для одиночного источника за счет
использования временной зависимости пеленга на него. Для нескольких источников такой подход
проблематичен. Вместо этого предлагается использовать более общую целевую функцию с подходящей
заменой переменных неизвестных параметров задачи. Для подавления помех может использоваться один
из адаптивных алгоритмов типа метода Кейпона или MUSIC.
The paper considers the problem of estimating the position of several moving sound sources using a moving
receiving system. A similar problem was previously solved for a single source by using the time dependence of its
bearing. For multiple sources, this approach is problematic. Instead, it is proposed to use a more general objective
function with suitable substitution of variables for the unknown parameters of the problem. To suppress
interference, one of the adaptive algorithms such as the Capon’s method or MUSIC can be used.
Одной из важных задач гидроакустики в настоящее время является задача определения
координат движущегося источника звука с помощью движущегося корабля-носителя бортовой
приёмной антенной решётки (АР). Это наиболее часто реализуемый сценарий на практике.
Решение задачи в такой постановке достигается методами апертурного синтеза. Следует
упомянуть, что в практических сценариях на борту корабля-носителя присутствуют различные
помехи. В частности, могут присутствовать пространственно-когерентные помехи, связанные с
работой механизмов корабля-носителя. Для неподвижных источников и для единственного
движущегося источника данная задача решена в [1, 2] соответственно. Решение последней
задачи в [2] основано на оценке текущего пеленга источника внутри некоторого временного окна
(предполагается, что внутри окна изменением пеленга можно пренебречь). Получаемая таким
образом зависимость пеленга от времени используется далее для оценки неизвестных
параметров источника. Эта оценка осуществляется за счет аппроксимации экспериментальной
зависимости модельной. Понятно, что на практике источник звука может быть не единственным.
В этой ситуации использовать метод, предложенный в [2], затруднительно. Для этого
необходимо в каждый момент времени обнаруживать несколько источников и оценивать их
пеленга. Кроме того, необходимо правильно ассоциировать полученные оценки с реальными
источниками (не допускать перепутывания). При увеличении числа источников это задача
становится слишком сложной, кроме того, кратно вырастает вычислительная сложность,
поскольку необходима отдельная оценка параметров траекторий всех источников. В связи с этим
весьма актуальной является разработка такого варианта некогерентного апертурного синтеза,
который позволит преодолеть указанные сложности при решении задачи локализации
нескольких источников. Решению этой задачи посвящена настоящая работа.
Модель принимаемого сигнала. На некотором временно́м интервале, когда можно
пренебречь движением корабля носителя, будем рассматривать последовательность векторов x j
(где j = 1,..., J — номер временно́го отсчёта), представляющих сигналы в узкой полосе частот
на выходе N-элементной АР с одного из бортов корабля-носителя:
x j = s j + n j + ξ j , j =1, , J ,
263
(1)
Методы прикладной гидроакустики
где J — число временны́х отсчётов; s j — полезный сигнал (сумма сферических волн от
нескольких источников со своими независимыми временным формами); n j — фоновый шум;
ξ j — помеха. Все эти процессы считаются белым гауссовым шумом с нулевым средним. Помеха
представляет собой набор источников сферических волн, расположенных вблизи АР. Фоновый
шум считается независимым на элементах АР.
Метод определения местоположения нескольких движущегося источников
с использованием некогерентного апертурного синтеза. Апертурный синтез предлагается
выполнять с помощью целевой функции одного из адаптивных методов обработки сигналов в
АР. Речь идет о функции, представляющей собой пеленгационный рельеф при оценке пеленга.
С помощью этой же функции можно строить и отклик на сферические волны в зависимости от
положения источника в декартовых координатах. В качестве адаптивных методов может
использоваться, например, метод MUSIC, метод Кейпона [3] или МПКС (максимальноправдоподобная классификация сигналов) [4]. Обозначим целевую функцию метода, которую
будем копить во времени функцию Z (t , A, B, vx , v y ) , где t — текущее время, A, B — неизвестное
начало траектории источника в неподвижных декартовых координатах на плоскости, vx , v y —
неизвестные проекции скорости источника. Отметим, что здесь мы можем не переходить к
пеленгу, а рассматривать сразу зависимость от неизвестных параметров траектории источника.
То есть для одновременного определения параметров нескольких источников звука будем искать
все значимые по величине локальные максимумы функции
T
Q( A, B, vx , v y ) = ∫ Z (t , A, B, vx , v y )dt ,
(2)
0
где Z (t , A, B, vx , v y ) — целевая функция используемого для обработки адаптивного метода,
например
N
V = ∑ ∑ μH vn
f
2
для метода
MUSIC;
M
— размерность
сигнального
=
n M +1
подпространства; μ — пространственная модель принимаемого сигнала в виде сферической
ˆ = J −1
волны; v n — n-й собственный вектор выборочной корреляционной матрицы K
J
∑x x
j =1
j
H
j
для определенного временного окна на определенной частоте. После максимизации функции (2)
по неизвестным параметрам будет получен набор оценок A, B, vx , v y для каждого источника. Из
предыдущих работ понятно, что использовать эти оценки на практике можно начиная с
некоторой величины общего времени накопления. Понятно также, что на практике интересует в
первую очередь текущее положение источников. Идеальным вариантом было бы изображение
карты источников в виде целевой функции (с подсветкой положения) в текущих координатах,
связанной с системой координат, неподвижной относительно корабля-носителя АР. Этого можно
достичь с помощью следующего подхода. Во-первых, от координат A, B, vx , v y путем замены
переменных перейдем к координатам xt ,end , yt ,end , vx , v y , где xt ,end= A + vx t , yt ,end= B + v y t —
текущие координаты источников. Границы обзора пространства при этом по сравнению с
начальным положением источника несколько увеличатся. В результате у нас получится функция
Q( xt ,end , yt ,end , vx , v y ) . Для её отображения в неподвижной системе координат достаточно
перейти к функции Q1 ( xt ,end , yt ,end ) = max Q ( xt ,end , yt ,end , vx , v y ) . Эволюция этой картины во
vx , v y
времени покажет нам, как апертурный синтез позволяет определить положения источников и как
улучшается во времени их локализация. Отметим, что область определения этой функции будет
меняться во времени при неизменных пределах изменения параметров A, B, vx , v y .
264
Методы прикладной гидроакустики
а
б
Рис. 1. Результат апертурного синтеза для 3 движущихся источников в координатах текущего
(конечного на данный момент) их положения xt ,end , yt ,end
а — показан момент прохода четверти окружности; б — всей окружности; белыми отметками обозначено истинное
текущее положение источников; черными отметками начало траектории источников
Дополнительное преобразование сдвига и поворота в соответствии с траекторией
движения корабля-носителя позволит отображать карту источников в неподвижной
относительно носителя системе координат. Будем считать, что в каждый момент времени у нас
имеется функция (2), рассчитанная для фиксированной сетки параметров A, B, vx , v y . Тогда
указанные преобразования координат можно осуществить с помощью двумерной интерполяции.
В результате получится карта произвольного количества источников звука в удобном для
отображения и визуального анализа виде. На рис. 1 приведены две такие карты, полученные с
помощью численного моделирования с помощью метода Кейпона в присутствии помех.
Антенная решетка из 32 гидрофонов с межэлементным расстоянием 2 м двигалась по
окружности радиуса 480 м со скоростью 3 м/с. Слева показан момент прохода четверти
окружности, справа — всей окружности. Параметры источников представлены в табл. 1.
Таблица 1
Параметры источников звука
№ источника/
параметр
1
2
3
A, м
B, м
vx , м/с
v y , м/с
Частота, Гц
500
-500
100
1500
1500
800
0,43
-0,43
-0,35
0,25
-0,25
0,61
363
Из рис.1 видно, что все три источника хорошо локализуются в виде максимумов целевой
функции. Положения этих максимумов соответствуют истинным.
Литература
1. Родионов А. А., Семенов В. Ю, Савельев Н. В., Коновалов К. С. Локализация неподвижного
источника звука с использование некогерентного апертурного синтеза с одновременным подавлением
помех // Изв. Вузов. Радиофизика, 2019. Т. 62. № 2. C. 126–135.
2. Родионов А. А., Семенов В. Ю., Савельев Н. В., Коновалов К. С. Локализация движущегося
источника звука с использованием некогерентного апертурного синтеза с одновременным подавлением
помех // Изв. вузов. Радиофизика, 2020. Т. 63, № 7. С. 557–567.
3. Van Trees, H. L. Detection, Estimation, and Modulation Theory // Optimum Array Processing / Ed.
H. L. Van Trees. New York: Wiley, 2002. Vol. 4. 1472 p.
4. Родионов А. А. Турчин В. И. Обработка сигналов в антенных решетках на основе модели помехи,
включающей корреляционную матрицу неполного ранга // Изв. Вузов «Радиофизика». 2017. Т. 60, № 1.
С. 60–71.
Данное исследование выполнено в рамках государственного задания ИПФ РАН по теме № FFUF2024-0040.
265
Методы прикладной гидроакустики
ВЫДЕЛЕНИЕ СИГНАЛОВ ШИРОКОПОЛОСНЫХ ИСТОЧНИКОВ ЗВУКА
В МЕЛКОМ МОРЕ ПРИ НАЛИЧИИ ОТРАЖЕНИЙ ОТ ДНА И ПОВЕРХНОСТИ
С ИСПОЛЬЗОВАНИЕМ ВЕРТИКАЛЬНОЙ РЕШЕТКИ ГИДРОФОНОВ
В. В. Артельный, А. С. Иваненков, канд. физ.-мат. наук, А. А. Родионов, канд. физ.-мат. наук,
А. В. Стуленков
Институт прикладной физики РАН, Нижний Новгород, Россия
SIGNAL WAVEFORM ESTIMATION OF BROADBAND SOUND SOURCES
IN A SHALLOW WATER IN THE PRESENCE OF REFLECTIONS FROM
THE BOTTOM AND SURFACE USING A VERTICAL HYDROPHONE ARRAY
V. V. Artelnyi, A. S. Ivanenkov, Ph.D., A. A. Rodionov, Ph.D., A. V. Stulenkov
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
В работе рассмотрена задача оценки сигнала, излучаемого подводным источником звука при проведении
измерительного эксперимента с помощью вертикальной антенной решетки на мелководном полигоне.
Сложность её решения заключается в неоднородности среды распространения звука. Для обработки
сигналов предложен специальный алгоритм, позволяющий адаптивно подавить помехи и оптимально
накопить сигнал от прямого луча, искаженного стратификацией водного слоя. Эффективность
предложенного алгоритма продемонстрирована на экспериментальных данных.
The paper considers the problem of estimating the signal emitted by an underwater sound source using a vertical
antenna array in a shallow water test site. The difficulty of the problem lies in the inhomogeneity of the sound
propagation medium. For signal processing, a special algorithm is proposed to adaptively suppress interference
and optimally accumulate the signal from the direct beam distorted by the stratification of the water layer.
The effectiveness of the proposed algorithm is demonstrated on experimental data.
В гидроакустике весьма актуальной является задача измерения и снижения подводных
шумов кораблей [1]. Для этого проводятся акустические измерения в мелководных полигонах на
масштабных моделях кораблей [1, 2]. В этих условиях часто удобно располагать приемную
систему в ближнем поле модели. В этом случае для подавления отражений от поверхности и дна
используется вертикальное размещение приемной антенной решетки (АР). При этом остаются
возможные искажения прямого поля, вызванные стратификацией. Возникает задача
одновременного подавлений мешающих некогерентных отражений, а также оптимального
накопления сигнала с учетом искажения его пространственной формы вследствие
стратификации. Решению этой задачи и посвящена данная работа.
Схема эксперимента. Для измерения шума подводных источников будем рассматривать
схему реального эксперимента, проведенного в августе 2022 г. в акватории Ладожского озера.
В эксперименте использовалась вертикальная эквидистантная решетка гидрофонов, центр
которой располагался на глубине около 10 м. Шаг решетки составлял 20 см, количество
приёмников — 32. На расстоянии около 20 м от приёмной системы и на глубине 6 м находился
измеряемый широкополосный источник со сложным спектральным составом. Для иллюстрации
на рис. 1 приведено расположение гидрофонов решетки и положение источника, белой
штриховой линией обозначена граница поверхности воды. Целью данного эксперимента была
оценка временной формы сигнала источника для дальнейшей оценки его спектрального состава.
Для решения такой задачи в антенной технике наиболее популярным является метод
суммирования с задержками. Этот метод заключается в когерентном суммировании принятых
гидрофонами сигналов с введёнными обратными временными задержками, соответствующими
времени прихода сигнала от источника до каждого из приёмников. Несмотря на ряд преимуществ
(например, таких как простота реализации и устойчивость к ошибкам в задании модели
принимаемого сигнала), метод суммирования с задержками чувствителен к наличию внешних
источников помехи. Так в качестве примера эксперименте на рис. 1 на двумерной координатной
сетке яркостным рисунком представлен пеленгационный рельеф источника, построенный с
использованием метода MUSIC (в узкой полосе на частоте 1,5 кГц). Как видно из рис. 1, кроме
прямого луча от источника на графике присутствует интенсивный отражённый от поверхности
сигнал. В этом случае, как было установлено, метод суммирования с задержками оказывается
266
Методы прикладной гидроакустики
неэффективным. Кроме того, для его реализации необходимо знать пространственную модель
полезного источника, зависящую от его координат. Для решения проблемы, связанной с
наличием интенсивных пространственно-когерентных помех, в настоящее время существует
множество адаптивных методов, позволяющих сформировать «ноль» диаграммы
направленности в направлении на мешающий источник. Однако, как известно, адаптивные
методы весьма чувствительны к рассогласованиям используемой модели и реальных условий,
что делает их применение на практике весьма затруднительным. В настоящей работе будет
предложен простой и эффективный метод обработки при наличии отражённых сигналов,
лишённый указанных выше недостатков.
Модель принимаемого сигнала и метод подавления мешающих отражений. Для
обработки широкополосных (ШП) сигналов будем рассматривать распространённый приём,
основанный на фильтрации принимаемых ШП сигналов банком узкополосных фильтров,
покрывающих исследуемый диапазон. Такая фильтрация может быть эффективно осуществлена
с использованием быстрого преобразования Фурье также, как и получение результирующего
ШП сигнала по набору узкополосных (см., например, [3]). После узкополосной фильтрации
сигналы на выходе N-элементной вертикальной АР на некотором временно́м интервале будем
рассматривать как последовательность векторов x j (где j = 1,..., J — номер временно́го
отсчёта):
x j = s 0, j + s s , j + sb , j + ξ j , j = 1, , J ,
(1)
где s j — сигнал прямого луча от источника; s s , j — сигнал отраженного луча от поверхности;
sb , j — сигнал отраженного луча от дна; ξ j — фоновый шум; J — число временны́х отсчётов.
Будем считать данные сигналы белым гауссовым шумом с нулевым средним. Отраженные от
поверхности и дна сигналы на практике являются частично-когерентными как в пространстве,
так и во времени. Это обусловлено ветровым волнением поверхности и сложной структурой
многослойного дна. В этой ситуации при измерении уровня подводного шума такие сигналы
выступают, фактически, в роли помех. Для их подавления предлагается следующий подход. На
первом этапе определяются координаты мнимых источников, связанных с этими отражениями.
Это можно сделать, например, за счет построения пеленагционного рельефа с помощью метода
MUSIC (пример такого рельефа показан на рис. 1).
Рис. 1. Результат фокусировки в вертикальной плоскости в узкой полосе
на частоте 1,5 кГц с использованием метода MUSIC
Элементы АР обозначены сиреневым цветом; поверхность воды — белой штриховой линией
267
уровень, дБ
Методы прикладной гидроакустики
частота, Гц
Рис. 2. Спектральные плотности мощности выделенных сигналов: с использованием суммирования с
задержками (красный цвет) и предложенного метода (синий цвет)
На рис. 1 четко виден прямой луч от источника (показан чёрным маркером) и отраженный
от поверхности луч (выше уровня воды); донный луч на данной частоте выражен достаточно
слабо. Для подавления поверхностного и донного лучей (при наличии) составим следующую
матрицу: R i =
I + σ s2a s a sH + σ b2ababH , где a s , ab — сферические волны, соответствующие
поверхностному и донному лучам соответственно, σ s2 , σ b2 — интенсивности этих лучей. Сама
процедура подавления сводится, как известно [4], к следующей операции: y j = R i−0.5 x j . Таким
образом, получился новый сигнал y j , который при идеальном подавлении содержит только
прямой луч. На следующем этапе необходимо оптимальным образом обработать этот сигнал для
оценки его временной формы с наибольшим выходным ОСШ. При неизвестной
пространственной форме сигнала единственного источника оптимальная оценка этой формы
сводится к вычислению первого собственного вектора v выборочной корреляционной матрицы
Ry =
1 J
∑ y j y Hj . Далее для оценки временной формы берется проекция принятого сигнала на
J j =1
этот вектор: sˆ j = v y j . Результат оценки спектральной плотности мощности результирующего
H
ШП сигнала на выходе АР по набору узкополосных в рассматриваемом эксперименте с
использованием предложенного метода изображён на рис. 2 синей линией. Рассматриваемая
полоса составляла около 2 кГц, размер деления по вертикальной оси — 5 дБ. Для сравнения
красной линией на том же рисунке приведён результат для метода суммирования с задержками.
Как видно из графиков, результат оценки спектра сигнала, выделенного предложенным методом,
позволяет более точно установить особенности спектра источника, а использование
суммирования с задержками при наличии мешающих источников оказывается неэффективным.
Литература
1. Бармак А. С, Коротин П. И., Слижов А. Б., Турчин В. И., Чащин А. С. Комплекс для измерения
параметров гидроакустического поля СИ ГАП «НЕВА-ИПФ» // Морская радиоэлектроника. 2011. № 1.
C. 20−24.
2. Orlov D. A., Rodionov A. A., Turchin V. I. Estimation of positions of local narrowband sources on a
ship hull using a vertical antenna array // Proc. VII-th Int. Conf. Ant. «Theory and Technique». Ukraine, Lviv.
2009. P. 239−241,
3. Wang Z. et al. Constant-beamwidth and constant-powerwidth wideband robust Capon beamformers for
acoustic imaging // The Journal of the Acoustical Society of America. 2004. Vol. 116, № 3. P. 1621–1631.
4. Van Trees, H. L. Detection, Estimation, and Modulation Theory. Optimum Array Processing / H. L.
Van Trees. New York: Wiley, 2002. Vol. 4. 1472 p.
5. Родионов А. А. Турчин В. И. Обработка сигналов в антенных решетках на основе модели помехи,
включающей корреляционную матрицу неполного ранга // Изв. Вузов «Радиофизика», 2017. Т. 60, № 1.
С. 60–71.
Данное исследование выполнено в рамках государственного задания ИПФ РАН по теме № FFUF2024-0040.
268
Методы прикладной гидроакустики
ПРИМЕНЕНИЕ СИГНАЛОВ С НЕПРЕРЫВНОЙ ПЕРЕСТРОЙКОЙ ЧАСТОТЫ
ДЛЯ ИССЛЕДОВАНИЯ ВЕТРОВОГО ВОЛНЕНИЯ СРЕДСТВАМИ ПОДВОДНОЙ
АКУСТИКИ
М. Б. Салин, канд. физ.-мат. наук, Н. А. Богатов, А. В. Ермошкин, канд. физ.-мат. наук, Д. А. Костеев,
Д. Д. Разумов
Институт прикладной физики РАН, Нижний Новгород, Россия
APPLICATION OF SIGNALS WITH CONTINUOUS FREQUENCY SWEEP SIGNALS
TO STUDY WIND WAVES BY UNDERWATER ACOUSTICS INSTRUMENTS
M. B. Salin, Ph.D., N. A. Bogatov, A. V. Ermoshkin, Ph.D., D. A. Kosteev, D. D. Razumov
Institute of Applied Physics, RAS, Nizhny Novgorod, Russia
Доплеровская обработка существенно расширяет возможности гидролокации, но в то же время
требует поиска компромисса между разрешением по дальности и по скорости определяемых целей.
Повторяющийся со строгой периодичностью импульсный сигнал аналогичен непрерывному сигналу по
своей чувствительности к эффекту Доплера, и сохраняет высокое разрешение по дистанции,
определяемое полной шириной полосы частот. При этом имеется периодическая повторяемость
функции неопределенности. Доклад посвящен результатам апробации метода зондирования
взволнованной поверхности непрерывными линейно-частотно модулированными сигналами. Приводятся
результаты измерения, выполненного в морских условиях, с борта НИС «Акад. М. Келдыш» в ходе рейса
АМК-90 по Арктическим морям РФ.
Doppler processing significantly expands the capabilities of sonar, but at the same time there is a search for a
compromise between the resolution in range and speed of the identified targets. A strictly periodically repeating
pulse signal is similar to a continuous signal in its sensitivity to the Doppler effect and retains high distance
resolution, defined by full frequency bandwidth. At the same time there is a periodic repetition of the ambiguity
function. The report is the result of testing the method of probing a rough surface with continuous linearly
frequency modulated signals. We present results of a study conducted in marine conditions during the voyage No.
90 of the research vessel «Acad. M. Keldysh» across the Arctic seas of the Russian Federation.
Исследование приповерхностного слоя морской среды является важной задачей
вследствие того, что он играет ключевую роль во взаимодействии атмосферы и океана, а
ветровое волнение, присутствующее на поверхности моря, во многом определяет динамику этого
взаимодействия. Методы подводной акустики могут дополнять традиционные контактные
средства измерения волнения и достаточно распространенные на сегодняшний день
радиолокационные методы измерения. Когерентные гидролокаторы, работающие в среднем
диапазоне частот, видятся перспективными средствами исследования морской поверхности, в
части измерения высоты, спектра волнения и прочих характеристик, так как они особенно
чувствительны к поверхностным волнам дециметрового диапазона. Также они позволяют
проводить исследования пузырьков от обрушающихся волн в приповерхностном слое или
образующихся в особых районах газовых факелов — выбросов из дна.
В своих предыдущих работах по зондированию морской поверхности из-под воды,
например, в [1], авторы столкнулись с определенными ограничениями при использовании
простых форм сигналов, когда невозможно получить одновременно подходящее разрешение по
дальности и по частоте Доплера, нужное для исследования течений и волн. Регулируя
длительность импульса, мы получаем либо хорошее разрешение волн в пространстве, лишаясь
информации об их движении, либо получаем подробный доплеровский спектр, но он
оказывается усредненным по площади около квадратного километра.
Применение сигнала с непрерывной перестройкой частоты, в виде пакета импульсов с
линейной частотной модуляцией (ЛЧМ) [2, 3], потенциально, может позволить справиться с этой
сложностью. Функция неопределенности сигнала такого типа имеет узкую локализацию как по
времени, так и по частоте Доплера. Допустимым недостатком в данном случае является
периодическая повторяемость функции неопределенности по обеим координатам.
269
Методы прикладной гидроакустики
Рис. 1. Спектр излучаемого сигнала
a — оконный спектр; б — вычисленный по всей длине пакета; в — то же, с увеличением
Рис. 2. Схема измерений
Алгоритм обработки. Пусть излучается сигнал, показанный на рис. 1. Фурьепреобразование с коротким окном приводит к спектрограмме в форме пилы (рис. 1, а), Фурьепреобразование с длинным окном демонстрирует, что сигнал имеет гребенчатый спектр
(рис. 1, в), который является следствием строгой периодичности сигнала и позволяет точно
определять доплеровскую частоту при сохранении общей ширины полосы сигнала.
Принятый сигнал умножается на идентичную «пилу», но имеющую сдвиг по частоте, что
аналогично применению следящего гетеродина. С учетом времени распространения в среде
несущая частота отраженного сигнала отстает от текущей частоты гетеродина и по этому
принципу дальность отождествляется со значением разностной частоты. Далее, алгоритм следит
за фазой сигнала на определенной разностной частоте, эта фаза плавно изменяется от импульса
к импульсу внутри пакета, благодаря чему можно определить частоту Доплера для этого сигнала
[4]. Предварительно принимаются меры, чтобы компенсировать расстройку задающих
генераторов в излучающем и приемном тракте.
Экспериментальная апробация. Метод опробован в ходе рейса № 90 научноисследовательского судна «Академик Мстислав Келдыш». Гидроакустическое зондирование
производилось в ходе стоянок судна в различных акваториях. Излучаемый сигнал был пакетом
из 30 ЛЧМ импульсов 1500−2500 Гц, где на каждый акт перестройки частоты («свип»)
приходится 0,2 с (рис. 1). Прием осуществлялся на кабельную гидроакустическую антенну,
поочередно устанавливаемую в вертикальном или горизонтальном положении (рис. 2).
Для примера, рассмотрим сигнал, принятый антенной в горизонтальном положении по
углу θ=90° — по нормали к линии гидрофонов (рис. 3). Из геометрии измерения в таком режиме
линейная антенна, при небольших задержках, принимает сигналы, отраженные от поверхности
и от дна, не различая их по направлению. На рис. 3 показана развертка сигнала после умножения
на опорную зависимость. Такой же график был бы получен при традиционной обработке
короткого импульса или одиночного ЛЧМ.
270
Методы прикладной гидроакустики
Рис. 3. Уровень эхосигнала относительно условной величины, станция от 24.10.2022
Рассчитав времена пробега сигнала до поверхности и до дна, действительно можно увидеть
соответствующие максимумы на графике (отмечены звездочками). Кроме всего прочего, видно
проникновение прямого сигнала, с момента излучения которого начинается отсчет времени.
Вообще, сонограммы вида рис. 3 в англоязычной литературе принято называть «clutter», что
означает беспорядок, шум или хаос, в том плане, что в мелком море затруднительно
проанализировать, от каких поверхностей отразился звук.
Применение пакета импульсов большой общей длительности позволяет провести
эффективную доплеровскую обработку при таком же высоком разрешении по дальности. На
рис. 4а-в построены спектры эхосигнала в выделенных точках. Диапазон по оси x построенных
графиков ограничивается периодом повторения функции неопределенности.
С помощью рис. 4, а, во-первых, можно проверить, что спектр излученного сигнала
является узким. Во-вторых, из сравнения рис. 4, б, в становится очевидным различие в
отражениях от взволнованной поверхности и от неподвижного дна. В случае рис. 4, б ширина
экспериментального спектра согласуется с результатами численного моделирования [5],
проведенного для близких значений частот и углов.
Рис. 4. Спектры сигналов, прошедших по различным путям от источника до приемника
а — прямой сигнал; б — зеркальное отражение от поверхности; в — зеркальное отражение ото дна;
г — рассеяние от на поверхности под углом 15° (а — в: на станции 24.10.2022; г: на станции 21.10.2022)
271
Методы прикладной гидроакустики
Представляет интерес проанализировать сигнал, образованный косым отражением от
поверхности и, соответственно, полученный при более длительных задержках (рис. 4, г). Именно
рассеяние под косыми углами определяет реверберационную помеху при дальнем
распространении звука. Совместно на рис. 4, г построен спектр, измеренный в том же опыте в
режиме длинного тонального импульса — по более традиционной методике, аналогичной [1].
Исходя из измерений радиолокатором [6] с борта того же судна, волнение на выполненной
станции характеризовалось значимой высотой 0,5 м и периодом пика 3 с.
Выводы. Разработана новая методика экспериментального исследования спектральных
характеристик рассеяния звука поверхностью. Новый способ менее требователен к техническому
оснащению и его результаты совпадают с измерениями традиционным методом, что дает
основание для дальнейшего внедрения методики и применения результатов к задачам дальнего
распространения звука.
Литература
1. Ermoshkin A. V., Kapustin I. A., Kosteev D. A., Ponomarenko A. A., Razumov D. D., Salin M. B.
Monitoring Sea Currents with Midrange Acoustic Backscattering // Water. 2023. Vol. 15, № 11. P. 2016.
2. Rui G., Xiao-tong W., Zhi-ming C. Comparison research on reverberation strength excited by PTFM and
CW signals // Proc. 13th ICSP, IEEE. 2016. P. 1677–1681.
3. Guan C., Zhou Z., Zeng X.“Optimal waveform design using frequency-modulated pulse trains for active
sonar // Sensors, 2019. Vol. 19. P. 4262.
4. Зуйкова Э. М., Байдаков Г. А., Титченко Ю. А., Салин М. Б. Доплеровский скаттерометр
трехсантиметрового диапазона с полным поляризационным зондированием // Журнал радиоэлектроники,
2021. № 2. С. 1−22
5. Салин М. Б., Разумов Д. Д. Особенности дифракции звука на взволнованной водной поверхности
в среднем диапазоне частот // Фундаментальная и прикладная гидрофизика. 2021. Т. 14, № 4. С. 98−110.
6. Ermoshkin A., Kapustin I. Estimation of the wind-driven wave spectrum using a high spatial resolution
coherent radar // Russ. J. Earth Sci. 2019. Vol. 19. P. ES1005.
Работа поддержана госзаданием ИПФ РАН № FUFF-2024-0040 (техническое оснащение схемы
измерения) и грантом РНФ № 20-77-10081 (экспедиция и обработка данных).
272
Методы прикладной гидроакустики
МЕДИАННАЯ ФИЛЬТРАЦИЯ СИГНАЛА ПРИ РЕГИСТРАЦИИ ПРОХОДА
МОРСКОГО ОБЪЕКТА
С. А. Шпак, канд. техн. наук, В. С. Колмогоров, д-р техн. наук
Тихоокеанское высшее военно-морское училище им. С. О. Макарова, Владивосток, Россия
USING A VERTICAL LINE OF HYDROPHONES IN AN ADAPTIVE COMPENSATOR
NOISE UNDER MULTIPATH CONDITIONS
S. А. Shpak, Ph.D., V. S. Kolmogorov, Dr.Sc.
S. O. Makarov Pacific Higher Naval College, Vladivostok, Russia
Экспериментальные исследования показали, что использование медианной фильтрации позволяет
повысить помехоустойчивость гидроакустического средства регистрации прохода морского объекта за
счет снижения уровня импульсных помех.
Experimental studies have shown that the use of median filtering makes it possible to increase the noise immunity
of the hydroacoustic means of registering the passage of a marine object by reducing the level of pulse interference.
Одной из проблем, требующих решения при обнаружении и регистрации прохода
малошумного морского объекта, в мелководной акватории является повышение
помехоустойчивости средств обнаружения. Спецификой помехо-сигнальной обстановки в
мелководной акватории является наличие импульсных помех, источники которых могут иметь
техногенный и биологический характер.
К техногенным источникам можно отнести импульсные помехи индустриального
происхождения, электромагнитные импульсные наводки, гидроакустические импульсы от
работы различных систем навигации, в том числе автономных подводных объектов и систем
измерения дистанции. К биологическим источникам помех следует, например, отнести
импульсы, создаваемые раками щелкунами [1].
Борьба с импульсной помехой возможна с использованием медианной фильтрации [2].
Использование медианной фильтрации при обработке гидроакустического сигнала,
принимаемого гидрофоном в условиях импульсных помех, может быть эффективным методом
обработки сигнала во временной области. Поскольку частотная селекция сигнала с целью
повышения помехоустойчивости средств регистрации шумового сигнала затруднена из-за
априорной неопределенности ширины спектра импульсной помехи.
Как показано в [3, 4] медианные фильтры достаточно часто применяются на практике как
средство предварительной обработки цифровых данных. Медианный фильтр представляет собой
оконный фильтр, последовательно скользящий по массиву сигнала, и возвращающий на каждом
шаге один из элементов, попавших в окно (апертуру) фильтра. Выходной сигнал yk скользящего
медианного фильтра шириной 2n+1 для текущего отсчета k формируется из входного временного
ряда …, xk-1, xk, xk+1,… в соответствии с формулой:
yk = med(xk-n, xk-n+1,…, xk-1, xk, xk+1 ,…, xk+n-1, xk+n),
где med(x1, …, xn, …, x2n+1) = xn+1, xn – элементы вариационного ряда, т.е. ранжированные в
порядке возрастания значений xn: x1 = min(x1, x2,…, x2n+1) ≤ x(2) ≤ x(3) ≤ … ≤ x2n+1 = max(x1, x2,…,
x2n+1).
Таким образом, в медианном фильтре протяженностью N отсчетов центральный элемент
заменяется медианой (т. е. средним элементом последовательности, упорядоченной в порядке
возрастания значений сигнала в «окне»).
Медианный фильтр является устойчивым и способным подавить даже бесконечно
большие по уровню отсчеты. Алгоритм медианной фильтрации обладает явно выраженной
избирательностью к элементам массива с немонотонной составляющей последовательности
чисел в пределах апертуры и наиболее эффективно исключает из сигналов одиночные выбросы,
попадающие на края ранжированного списка.
С учетом ранжирования в списке медианные фильтры хорошо подавляют шумы и помехи,
протяженность которых составляет менее половины окна. В одномерном случае стабильными
273
Методы прикладной гидроакустики
точками медианных фильтров являются «локально-монотонные» последовательности, которые
медианный фильтр оставляет без изменений.
При освещении подводной обстановки с использованием активных и пассивных
гидроакустических средств, активные системы будут создавать импульсные помехи работе
пассивных средств.
Так на рис. 1 и 2 представлены временная реализация и спектрограмма
зарегистрированного сигнала при работе гидроакустической системы навигации (ГАНС)
автономного необитаемого подводного аппарата (АНПА) в мелководной акватории с глубинами
до 20 м.
Из анализа рис. 1 и 2 видно, что во всей реализации записи наблюдаются кратковременные
повторяющиеся импульсные сигналы, вызванные работой ГАНС АНПА, которые являются
помехами для работы пассивных средств регистрации прохода морского объекта. Отражения от
береговой черты морской акватории и наличие импульсов биологического характера
обуславливает нестационарность повторяющихся импульсов, как по времени, так и по уровню.
При анализе рис. 1 (нижняя временная области) с помощью режима «экранная лупа»
видно, что период следования ряда импульсов составляет порядка 15 с.
Рис. 1. Временное представление записи сигнала работы ГАНС АНПА в мелководной акватории
Рис. 2. Спектрограмма записи сигнала работы системы ГАНС
автономного необитаемого подводного аппарата
274
Методы прикладной гидроакустики
Рис. 3. Спектр зарегистрированного сигнала импульса работы ГАНС АНПА
Рис. 4. Временное представление результатов обработки сигналов ГАНС АНПА
до и после медианной фильтрации
При этом, как видно из анализа спектрограммы, представленной на рис. 2, принятые
импульсные сигналы имеют широкую область частот порядка 15 кГц, что, как известно,
соответствует короткой длительности принятых сигналов во временной области.
На рис. 3 представлен спектр зарегистрированного сигнала при наличии и отсутствии
импульса, вызванного работой ГАНС АНПА.
С целью подавления сигналов работы гидроакустической системы навигации АНПА,
которые при обнаружении и регистрации прохода АНПА являются мешающими импульсными
помехами, может быть использована медианная фильтрация. При этом, как отмечалось ранее,
основным требованием, предъявляемым к работе медианного фильтра, является необходимость
выполнения условия, чтобы длительность мешающих импульсов составляла менее половины
«окна» медианного фильтра.
С этой целью была разработана схема медианной фильтрации в программе LabVIEW.
Принятые с помощью гидрофона излучающие импульсные сигналы сигнал от работы ГАНС
АНПА подавались на аналого-цифровой преобразователь и далее на медианный фильтр.
Медианный фильтр настраивался в зависимости от длительности входного сигнала так, чтобы
его «окно» по длительности было в два раза больше длительности входного сигнала (импульса).
Далее, после обработки медианным фильтром, полученный результат подавался на устройство
отображения с целью оценки полученного результата.
На рис. 4 представлено временное представление результатов обработки сигналов ГАНС
АНПА до и после медианной фильтрации.
275
Методы прикладной гидроакустики
Рис. 5. Спектрограмма результатов обработки сигнала после медианной фильтрации
Рис. 6. Спектр результатов принятого сигнала до и после медианной фильтрации
Как видно из рис. 4, использование медианой фильтраци позволяет подавить сигналы
ГАНС АНПА, которые в данном случае являются импульсными помехами, при этом
среднеквадратическое отклонение принятых отчетов после медианной фильтрации становится
на порядок меньше по сравнению с принятыми отчетами до медианной фильтрации.
На рис. 5 и 6 представлена спектрограмма и спектр результатов обработки ГАНС АНПА
после медианной фильтрации.
Из анализа рис. 5 видно, что в результате обработки с использованием медианной
фильтрации уровень принятого сигнала (среднеквадратическое отклонение принятых отсчетов)
от работы ГАНС АНПА снизилось порядка 30 дБ по сравнению с результатами обработки без
использования медианной фильтрации (см. рис. 2).
Таким образом, как видно из анализа рис. 5 и 6, использование медианной фильтрации
позволяет значительно подавить импульсные сигналы от работы гидроакустической
навигационной системы АНПА, что приводит к снижению амплитуды и ширины спектра помех
работе приемной системы.
Литература
1. Рутенко А. Н., Ущиповский Д. С. и др. Натурные и модельные исследования акустических
сигналов, генерируемых раком-щелкуном в б. Витязь Японского моря // Акуст. журн. 2021. Т. 67, № 6.
С. 684–694.
2. Патент РФ № 2616357 от 14.04.2017г. Способ регистрации малошумного морского объекта с
использованием медианной фильтрации / Колмогоров В. С., Пономарев М. О., Шпак С. А. и др.
3. Давыдов А. В. Цифровая обработка сигналов. Учебное пособие в электронной форме.
Екатеринбург, УГГУ. http://www.prodav.narod.ru/dsp/index.html.
4. Хуанг Т. С., Эклунд Дж.-О., Нуссбаумер Г. Дж. и др. Быстрые алгоритмы в цифровой обработке
изображений / Под ред. Т. С. Хуанга. Пер. с англ. М.: Радио и связь, 1984. 224 с., ил.
276
Методы прикладной гидроакустики
КОЛИЧЕСТВЕННАЯ ОЦЕНКА ЭФФЕКТИВНОСТИ АДАПТИВНЫХ АЛГОРИТМОВ
ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ ПРИ ПОИСКЕ МАЛОШУМНОГО
ПОДВОДНОГО АППАРАТА В УСЛОВИЯХ НАДВОДНОГО СУДОХОДСТВА
РАЗЛИЧНОЙ ПЛОТНОСТИ
А. И. Машошин, д-р техн. наук, В. С. Мельканович, канд. техн. наук
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
QUANTITATIVE ASSESSMENT OF THE EFFECTIVENESS OF ADAPTIVE SPATIAL
PROCESSING ALGORITHMS IN THE SEARCH FOR A LOW-NOISE UNDERWATER
VEHICLE IN CONDITIONS OF SURFACE NAVIGATION OF VARIOUS DENSITIES
A. I. Mashoshin, Dr.Sc., V. S. Melkanovich, Ph.D.
JSC «Concern «CNRI «Electropribor», St. Petersburg, Russia
Получены результаты модельной количественной оценки эффективности решения задачи обнаружения
и отслеживания малошумного подводного аппарата (ПА) с применением неадаптивного алгоритма
Бартлетта, алгоритма Кейпона, а также алгоритма Кейпона, совмещенного с проекционной процедурой
ограничения мощности сигналов сильных локальных источников.
The results of a model quantitative assessment of the effectiveness of solving the problem of detecting and tracking
a low-noise underwater vehicle (UV) using the non-adaptive Bartlett algorithm, the Capon algorithm, as well as
the Capon algorithm combined with a projection procedure for limiting the power of signals from strong local
sources are obtained.
Введение. Несмотря на значительное количество работ, посвящённых адаптивным
алгоритмам пространственной обработки сигналов антенных решеток[1,2], как правило, авторы
демонстрируют эффект применения этих алгоритмов на примерах, не позволяющих в конечном
счете судить о том, какой количественный показатель качества работы гидроакустической
аппаратуры повысится при их внедрении.
Цель настоящей работы — предложить вариант методики интегральной оценки
эффективности различных алгоритмов пространственной обработки при обнаружении слабо
шумящих источников в условиях надводного судоходства различной плотности.
Основная часть. В качестве показателей эффективности при моделировании были
выбраны средние значения дистанции обнаружения ПА и времени наблюдения ПА с момента
его обнаружения до момента потери с ним акустического контакта.
Для сравнения были выбраны 3 алгоритма:
− неадаптивный алгоритм Бартлетта как база для сопоставления и одновременно как один
из обязательных алгоритмов пространственной обработки в режимах шумопеленгования всех
гидроакустических комплексов [1];
− алгоритм Кейпона, реализуемый по выходу сформированных по Бартлетту
пространственных каналов (ПК), являющийся практически стандартом классических
адаптивных алгоритмов для многоэлементных антенных решеток [1−5];
− алгоритм Кейпона с контролируемым ограничением выходной мощности когерентных
помех, относящийся к быстрым проекционным алгоритмам [5−7].
Последний алгоритм включает два этапа обработки сигналов — адаптивное ограничение
мощности сильных сигналов на выходе веера ПК и последующую реализацию алгоритма
Кейпона по выходу ПК. Преимущество каскадной реализации двух алгоритмов основывается на
том, что алгоритм ограничения мощности обеспечивает алгоритму Кейпона лучшие условия для
разрешения за счет выравнивания уровней сигналов, а также осуществляет подавление бокового
поля помех не только по азимуту, но и по углу места, что дает возможность ограничиться при
реализации алгоритма Кейпона использованием лишь ПК, лежащих в одной азимутальной
плоскости с направлением наблюдения.
Методика. Эффективность алгоритмов оценивается путём имитационного моделирования
для ситуации, в которой в районе моря неподвижно установлена станция шумопеленгования с
277
Методы прикладной гидроакустики
цилиндрической многоэлементной антенной. Решается задача обнаружения малошумного ПА,
пересекающего зону обзора станции.
Циклом моделирования является однократное преодоление ПА зоны обзора станции.
Количество судов в районе определяется в соответствии с заданной плотностью судоходства.
Моделируемые объекты движутся с постоянными случайно заданными курсами и скоростями.
На каждом такте обзора рассчитывается лучевая структура сигнала каждого
моделируемого объекта на входе приёмной антенны и вычисляются комплексные спектры
сигналов по выходу веера неадаптивных ПК (алгоритм Бартлетта) по заданным углам места
(ярусам) и азимуту. По завершении формирования пеленгационных рельефов по всем ярусам для
каждого алгоритма пространственной обработки принимается решение об обнаружении либо не
обнаружении ПА.
По завершении перебора всех тактов обзора, составляющих цикл моделирования
вычисляется дистанция обнаружения ПА, соответствующая моменту первого обнаружения, и
суммарное время наблюдения ПА, как произведение количества тактов обзора, на которых ПА
был обнаружен, на интервал времени между ними.
Выполнение циклов моделирования для каждого из значений плотности надводного
судоходства повторяется 100 раз.
Моделирование проводилось при следующих исходных данных:
− глубина района 200 м; скорость звука монотонно увеличивается с глубиной с
градиентом 0,028 с-1; дно — ил-песок; волнение моря 2 балла;
− приведённая шумность ПА 30 дБ (относительно уровня шумов моря;
− средняя скорость мешающего судоходства 7,5 м/с, средняя приведённая шумность
70 дБ;
− заглубление станции шумопеленгования 50 м, диаметр антенны 5 м, высота 3 м, ширина
характеристики направленности антенны в рабочей полосе 2,7°, время накопления 20 с,
обработка ведётся в 3-х вертикальных ярусах −7°, 0°, +7°
На рис. 1 приведены примеры пеленгационных рельефов, соответствующих трём
моделируемым алгоритмам — Бартлетта (зелёная линия), классического Кейпона (синяя линия),
Кейпона с ограничением мощности когерентных помех (красная линия). Из рассмотрения рис. 1
следует, что наилучшие условия для обнаружения малошумного ПА предоставляет алгоритм
Кейпона с ограничением мощности когерентных помех.
20
Бартлетт
Кейпон
Огр. мощн.
Колич еств о судов
Пеленгационны е рельефы
300
250
200
150
100
50
0
0
-150
-5
-120
-90
-60
-30
0
30
60
90
120
150
Пеленг, град
Рис. 1. Пеленгационные рельефы
Алгоритм Бартлетта — зелёная линия; Кейпона — синяя линия;
Кейпона с ограничением мощности помех — красная линия;
чёрная стрелка указывает направление на ПА
278
-4
-3
-2
lg(W, ед/кв.км)
Рис. 2. Среднее количество судов
в круге радиуса 100 км
в зависимости от плотности
судоходства
12
9
Бартлет
Кейпон
Огр.мощн.
6
3
0
-4
-3
-2
Время наблю дания, мин
Дист. обнаружения, км
Методы прикладной гидроакустики
120
Бартлет
Кейпон
Огр.мощн.
90
60
30
0
-4
-3
-2
lg(W, ед/кв.км)
lg(W, ед/кв.км)
а
б
Рис. 3. Средняя дистанция обнаружения (a) и время наблюдения (б) малошумного ПА в зависимости от
логарифма плотности судоходства при использовании трёх алгоритмов пространственной обработки
Результаты моделирования приведены на рис.2 и 3 в виде зависимостей от логарифма
плотности судоходства:
− среднего количества судов в круге радиуса 100 км (рис. 2);
− средней дистанции обнаружения ПА (рис. 3, а);
− среднего времени наблюдения ПА (рис. 3, б).
Выводы:
− применение классического алгоритма Кейпона позволяет по сравнению с
использованием алгоритма Бартлетта в условиях надводного судоходства увеличить дистанцию
обнаружения малошумного ПА до 35 %, а время наблюдения — до 60 %;
− применение алгоритма Кейпона с ограничением мощности когерентных помех в тех же
условиях по сравнению с использованием алгоритма Бартлетта обеспечивает увеличение
дистанции обнаружения ПА до 50 %, а время наблюдения — до 90 %.
Литература
1. Van Trees H.L. Optimum Array Processing: Part IV. Detection, Estimation, and Modulation Theory.
Wiley Interscience. 2002. P. 1470.
2. Krim H., Viberg M. Two decades of array signal processing research // IEEE Signal Processing
Magazine.1996. № 7. P. 67–95.
3. Gray D.A. Formulation of The Maximum Signal to Noise Array in Beam Space // JASA. 1982. Vol. 72,
№ 14. P. 1195−1201.
4. Ильин И. М. Оптимизация обработки сигналов на выходе сформированного веера характеристик
направленности // Вопросы судостроения. Серия «Общетехническая». 1984. Вып. 75. С. 49–54.
5. Малышкнн Г. С., Мельканович В. С. Классические и быстрые проекционные адаптивные
алгоритмы в гидроакустике СПб.: ГНЦ РФ АО «Концерн «ЦНИИ «Электроприбор», 2022.
6. Ратынский М. В. Адаптация и сверхразрешение в антенных решетках. М.: Радиоисвязь, 2004.
7. Мельканович В. С. Особенности построения адаптивной обработки сигналов по выходу
цилиндрической антенной решетки с горизонтальной образующей // Сб. мат. конф. «Управление в морских
системах» (УМС-2020). 2020. СПб.
Работа выполнена при поддержке Российского научного фонда (проект №23-29-00803).
279
Методы прикладной гидроакустики
МОБИЛЬНЫЙ ПОЛИГОН ДЛЯ ИЗМЕРЕНИЯ ПЕРВИЧНОГО
ГИДРОАКУСТИЧЕСКОГО ПОЛЯ ПОДВОДНЫХ АППАРАТОВ
А. И. Машошин, д-р техн. наук, И. С. Пестерев, канд. техн. наук
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
MOBILE TEST SITE FOR MEASURING THE PRIMARY HYDROACOUSTIC FIELD
OF UNDERWATER VEHICLES
A. I. Mashoshin, Dr.Sc., I. S. Pesterev, Ph.D.
JSC «Concern «CSRI «Elektropribor», St. Petersburg, Russia
В работе описана методика оперативного измерения первичного гидроакустического поля подводных
аппаратов с использованием гидроакустического буя с направленной антенной и калиброванным
приёмным трактом. Обоснованы условия, при выполнении которых точность измерений будет
соответствовать заданным требованиям.
The paper proposes to promptly measure the primary hydroacoustic field of underwater vehicles using a mobile
polygon based on a hydroacoustic buoy with a directional antenna. The conditions under which the measurement
accuracy will meet the specified requirements are justified.
Введение. Интенсивное развитие подводной робототехники и расширение географии
производителей подводных аппаратов (ПА) обуславливает острую потребность в мобильных
системах измерения их первичных гидроакустических полей (ПГП), в частности, для оценки
возможности их обнаружения пассивными гидроакустическими средствами [1-3]. В настоящей
работе приводятся результаты разработки и испытаний такой системы на базе пассивного
гидроакустического буя с направленной гидроакустической антенной и калиброванным
приёмным трактом.
Описание методики определения ПГП. Методика должна обеспечивать измерение ПГП
в стандартных [4] третьоктавных фильтрах со среднеквадратической погрешностью (СКП) не
выше заданной (например, 3 дБ). Приведённый к 1 м уровень шумоизлучения ПА в i -м
третьоктавном фильтре Wi , Па, определяется по формуле
f2i S
f2i S ( f )
( f ) df
=
Wi r ∫ s +2n
df − ∫ n2
f1i η ( f )
f1i η ( f )
0,5
,
(1)
где f1i , f 2i — нижняя и верхняя граничные частоты i -го третьоктавного фильтра, Гц [4]; r —
расстояние от ПА до приёмника, м; S s + n ( f ) — энергетический спектр смеси сигнала ПА и
помехи (шумов моря) на выходе приёмника, В2; S n ( f ) — энергетический спектр помехи, В2;
η ( f ) — передаточная характеристика приёмного тракта, В/Па.
Относительная дисперсия оценки приведённого уровня ПГП в i -м третьоктавном фильтре
в соответствии с формулой (1) определяется выражением [5]:
(
)
0,5
1 + Q −1 2 + Q −2
2
2
2
σWi σr σηi
i
i
,
=
+
+
Wi 2 r 2 ηi2 f 2/ i − f1/ i T
(
)
(2)
где Wi , r , ηi — истинные значения величин, σWi , σr , σηi — СКП их оценки; Qi — отношение
сигнал/помеха (по мощности); T — время накопления при измерении, с.
280
Методы прикладной гидроакустики
Рис.1. Иллюстрация алгоритма определения расстояния между ПА и буем
Третьим слагаемым в формуле (2) можно пренебречь при Qi > 10 дБ, поэтому при
использовании приёмника со стандартной СКП калибровки 1 дБ для обеспечения заданной
точности определения ПГП (не более 3 дБ) относительная СКП оценки расстояния от ПА до
приёмника не должна превышать 2 дБ, или 26 % от истинного значения. Выполнение условия
Qi > 10 дБ требует корректного выбора дистанции проведения измерений с учётом уровня ПГП
ПА и шумов моря, направленности приёмника и характера распространения звука в выбранной
акватории.
Остановимся более подробно на методе определения текущего расстояния от ПА до
приёмника при измерении ПГП ПА с использованием гидроакустического буя с направленной
акустической антенной, установленного на якоре в точке моря O (рис. 1). Мимо буя движется
ПА с постоянным курсом и с известной постоянной скоростью V , измеряемой навигационными
приборами ПА с СКП не более 0,5 м/с, при этом буй измеряет пеленг ПА и запоминает его
значения с привязкой ко времени.
Модель движения ПА (по теореме синусов из треугольника P0OPi ) имеет вид
=
ri V ( ti − t0 )
sin ( K − P0 )
sin ( Pi − P0 )
,
(3)
где t0 и ti — произвольные начальный и текущий моменты времени, с; P0 и Pi , r0 и ri —
соответствующие им значения пеленга ПА P и расстояния между ПА и буем r ; K — курс ПА,
определяемый по данным курсоуказателя ПА либо вычисляемый по формуле
K = arctg
sin ( P1 − P0 ) ( t2 − t1 ) sin ( P2 ) − sin ( P2 − P1 ) ( t1 − t0 ) sin ( P0 )
sin ( P1 − P0 ) ( t2 − t1 ) cos ( P2 ) − sin ( P2 − P1 ) ( t1 − t0 ) cos ( P0 )
,
(4)
где P0 , P1 и P2 — значения пеленга ПА, измеренные в начале ( t0 ), середине ( t1 ) и конце ( t2 )
движения ПА с постоянными курсом и скоростью.
Формула (3) позволяет определить расстояние между ПА и буем в произвольный момент
времени. Кратчайшее расстояние между ПА и буем соответствует пеленгу Ptr ,
перпендикулярному курсу ПА, и определяется по формуле rtr =
ri ⋅ sin ( K − Pi ) . Точность
определения расстояния между ПА и буем зависит от точности измерения пеленгов ПА и
разности пеленгов в моменты начала и окончания движения ПА с постоянными курсом и
скоростью. Проведённое моделирование показало, что при определении курса ПА по формуле
(4) и при СКП измерения пеленга 2°, характерной для буя с направленной антенной, СКП
определения расстояния между ПА и приёмником не превышает 20 %, что вполне согласуется с
приведённым выше требованием.
281
Методы прикладной гидроакустики
Рис. 2. Уровни ПГП катера в третьоктавных фильтрах, измеренные по данным буя
и соответствующие скоростям хода 6 уз и 22 уз
Апробация методики определения ПГП. Апробация методики проводилась в акватории
Ладожского озера в мелководном районе с глубиной 15–20 м. В ходе проведения работ волнение
составляло 1 балл, профиль скорости звука являлся монотонно возрастающим с глубиной с
малым градиентом. В качестве мобильной системы измерения ПГП использовался буй с
направленной калиброванной гидроакустической антенной, оборудованной компасом,
позволяющим определять текущую ориентацию антенны по горизонту с СКП 0,3°, и
погружённой на глубину 10 м. Приёмный тракт буя обеспечивал приём сигналов в полосе частот
1−15 кГц.
Объектом измерения ПГП выступал катер, многократно проходивший мимо буя на разных
дистанциях с постоянной скоростью 6 уз (12 проходов) или 22 уз (6 проходов). Пеленг катера
определялся буем в полосе частот 6–12 кГц с СКП 2° (с учётом ошибки компаса). Расстояние
между катером и буем контролировалось лазерным дальномером с СКП 10 %. На рис. 2 в
качестве примера изображены полученные с использованием описанной методики значения
уровней ПГП катера в третьоктавных фильтрах, соответствующие скоростям хода 6 и 22 уз. СКП
оценки ПГП находится в интервале от 2 до 3 дБ в зависимости от номера фильтра.
Заключение. Обоснована и описана запатентованная [6] методика измерения ПГП
морских объектов с использованием одиночного буя с направленной антенной. Проведённая
апробация методики подтвердила возможность измерения ПГП морского объекта со
среднеквадратической погрешностью 2–3 дБ, что сопоставимо с точностью, обеспечиваемой
стационарными гидроакустическими полигонами.
Литература
1. Захаров И. Г., Емельянов В. В., Щеголихин В. П., Чумаков В. В. Скрытность и защита кораблей
по физическим полям [Электронный ресурс]. https://telegra.ph/Skrytnost-i-zashchita-korablej-po-fizicheskimpolyam-Referat-Istoriya-tehniki-09-26 (дата обращения 10.05.2023).
2. Маненко В. А., Мильшин В. Н., Селезнёв В. М. Зарубежные технические средства измерения
физических полей кораблей // Военная мысль. 2019. №8. С. 143−149.
3. Пархоменко В. Н., Сазонов С. П. Важнейший элемент инфраструктуры флота // СПб, Моринтех.
2003. С.33-36.
4. ГОСТ 17168-82. Фильтры электронные октавные и третьоктавные. Общие технические
требования и методы испытаний.
5. Вентцель Е. С., Овчаров Л. А. Теория вероятностей и её инженерные приложения. М.: Наука,
1988. 273 с.
6. Патент РФ № 2801077 с приоритетом от 17.02.2023 по заявке № 2023103677. Способ измерения
шумности подводного аппарата. Авторы: Иванов М. В., Машошин А. И., Пашкевич И. В., Потапов В. А.
Опубл. 01.08.23, бюлл. № 22.
282
Методы прикладной гидроакустики
МЕТОДИКА РАСЧЁТА ГЛУБИНЫ ПРОНИКНОВЕНИЯ В ГРУНТ ПРИ МОРСКОЙ
СЕЙСМОРАЗВЕДКЕ
А. И. Машошин, д-р техн. наук, А. В. Цветков
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
TECHNIQUE FOR CALCULATING THE DEPTH OF PENETRATION INTO
THE GROUND DURING MARINE SEISMIC EXPLORATION
A. I. Mashoshin, Dr.Sc., A. V. Tsvetkov
JSC «Concern «CSRI «Elektropribor», St. Petersburg, Russia
В работе приведена методика расчёта глубины проникновения в грунт при морской сейсморазведке,
разработанная в интересах обоснования технических характеристик элементов подводного
робототехнического комплекса, предназначенного для проведения сейсморазведки подо льдом.
The paper presents a technique for calculating the depth of penetration into the ground during marine seismic
exploration, developed in the interests of substantiating the technical characteristics of the elements of an
underwater robotic complex designed for conducting seismic exploration under ice.
Введение. Значительный объём залежей углеводородов на территории РФ находится в
Арктической шельфовой зоне, и их поиск и последующая добыча являются национальной
стратегической задачей [1−3]. Основным методом решения этой задачи является сейсморазведка,
проводимая с геофизических судов, которые способны буксировать блоки акустических
излучателей и протяженные приёмные антенны (сейсмокосы), а также ставить и поднимать на
борт донные приёмные станции [1−6]. Такой способ сейсморазведки существенно зависит от
состояния поверхности моря.
Альтернативным решением проблемы поиска углеводородов на морском шельфе является
создание подводных робототехнических комплексов (РТК), которое сопряжено с рядом сложных
технических задач, например, созданием мощного сверхнизкочастотного (ниже 100 Гц)
излучателя, способного, в отличие от широко используемых излучающих пневмопушек,
функционировать при его буксировании на значительном заглублении. Целью предлагаемой
работы является разработка методики расчёта достижимой глубины сейсморазведки в
зависимости от мощности излучателя.
Обоснование методики. Геометрия донного зондирования приведена на рис. 1.
Рис. 1. Геометрия сейсморазведки
283
Методы прикладной гидроакустики
Зондирующий сигнал (ЗС), излучённый гидроакустическим излучателем (ГИ),
расположенным в толще воды на расстоянии от дна H emit , преодолевает водный слой, проникает
в грунт, отражается от верхней границы линзы в грунте, заполненной нефтью либо газом, и по
обратному пути поступает на приёмник. В качестве приёмника рассматривается
многоэлементная антенна, состоящая из гидрофонов, расположенная в толще воды на
расстоянии от дна H rec , либо антенна, состоящая из геофонов, имеющих контакт с грунтом
( H rec = 0 ).
В качестве глубины сейсморазведки будем рассматривать расстояние от дна до верхней
границы линзы, заполненной нефтью либо газом, H linz , при котором в эхосигналах (ЭС),
принятых приёмниками и обработанных с использованием специальных программ, содержится
достаточно информации для надёжного обнаружения линзы. Для формализации будем считать,
что данное условие выполняется при превышении отношения мощности эхосигнала к мощности
помехи на входе каждого приёмника антенны некоторой заданной пороговой величины:
Pes2
Pn2
≥ Qtr ,
(1)
где Pes2 и Pn2 — квадраты давлений ЭС и помехи соответственно на входе приёмника в полосе
частот ∆f ; Qtr — пороговое для обнаружения отношение сигнал/помеха (по мощности) на
входе приёмника. Квадрат давления ЭС вычисляется по формуле:
2
P=
Pzs2 ⋅ Lsum ,
es
(2)
где Pzs2 — квадрат давления ЗС в полосе частот ∆f , приведённый к расстоянию 1 м от ГИ;
Lsum — суммарный коэффициент потерь энергии ЗС при распространении по маршруту
«ГИ – линза – приёмник», складывающихся из потерь вследствие:
− сферического расширения фронта волны;
− преломления акустических лучей по закону Снеллиуса на границе вода-грунт;
− пространственного затухания сигнала в воде и в грунте;
− при прохождении сигнала из воды в грунт и из грунта в воду;
− при отражении сигнала от линзы.
Таким образом, сущность предлагаемой методики заключается в решении неравенства (1)
относительно заглубления линзы H linz .
Рис. 2. Зависимости глубины проникновения ЗС в грунт от давления ГИ
284
Методы прикладной гидроакустики
Пример расчёта. Рассчитаем глубину проникновения в грунт для условий мелкого моря с
глубиной 300 м. ГИ буксируется на глубине 100 м. Приём эхосигнала осуществляется на антенну
из геофонов, заглублённых в грунт, либо на антенну из гидрофонов, буксируемой на расстоянии
100 м от грунта.
Расчёт будем осуществлять при следующих исходных данных:
− полоса частот ЗС 10…90 Гц со средней частотой 50 Гц;
− давление ЗС 100…1000 кПа;
− длительность ЗС 12,5 мс;
− пороговое отношение сигнал/помеха на входе одного приёмника 6 дБ;
− коэффициенты пространственного затухания на частоте 50 Гц: в воде 4×10-4 дБ/км;
в глинистом грунте 1,5 дБ/км;
− уровень шумов моря на входе приёмника на частоте 50 Гц в полосе 1 Гц при умеренном
судоходстве 6,3 мПа (50 дБ);
− плотность воды 1030 кг/м3, глинистого грунта 2650 кг/м3, нефти 835 кг/м3;
− скорость звука в воде 1490 м/с, в глинистом грунте 2500 м/с, в линзе, заполненной
нефтью, 1290 м/с.
Результаты расчёта приведены на рис. 2 в виде графика зависимости глубины
проникновения ЗС в грунт от давления, создаваемого ГИ, при приёме сигналов на геофоны и
гидрофоны. Из рассмотрения рис. 2 следует:
− при давлении ГИ в диапазоне от 200 до 1000 кПа в полосе частот 10…90 Гц глубина
проникновения в грунт в зависимости от условий составляет от 1 до 6 км;
− глубина проникновения больше при использовании геофонов, имеющих плотный
контакт с грунтом, по сравнению с гидрофонами, ввиду отсутствия потерь энергии ЭС при
преодолении границы «грунт – вода» и при распространении в воде от дна до гидрофона. Кроме
того, сигналы с выхода геофонов имеют бóльшую информативность, поскольку содержат данные
о поперечных волнах, не распространяющихся в воде [1].
Заключение. Разработана методика, позволяющая рассчитать глубину сейсморазведки от
давления, создаваемого гидроакустическим излучателем в различных условиях его применения.
Литература
1. Лаверов Н. П., Рослов Ю. В., Лобковский Л. И. и др. Перспективы донной сейсморазведки в
Российской Федерации // Арктика: экология и экономика. 2011. №4. С.4-13.
2. Ампилов Ю. П. Сейсморазведка на российском шельфе // Offshore. 2015. № 2(8). С. 38−45.
3. Ампилов Ю. П. Оборудование для морской сейсморазведки: Окно возможностей для
импортозамещения // Offshore. 2017. Август. С. 28−33.
4. Мак-Куиллин Р., Бекон М., Барклай У. Введение в сейсмическую интерпретацию (пер. с англ.).
М.: Недра, 1985. 309 с.
5. Кондратьев О. К. Сейсмические волны в поглощающих средах. М.: Недра, 1986.
6. Уайт Дж. Э. Возбуждение и распространение сейсмических волн. М.: Недра, 1986.
285
Методы прикладной гидроакустики
ЭМУЛЯТОР ГИДРОАКУСТИЧЕСКОГО КАНАЛА ДЛЯ ОЦЕНКИ КАЧЕСТВА
ГИДРОАКУСТИЧЕСКИХ МОДЕМОВ
А. И. Машошин, д-р техн. наук, И. В. Пашкевич, А. В. Шафранюк, канд. техн. наук
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
A HYDROACOUSTIC CHANNEL EMULATOR FOR EVALUATING THE QUALITY
OF HYDROACOUSTIC MODEMS
A. I. Mashoshin, Dr.Sc., I. V. Pashkevich, A. V. Shafranyuk, Ph.D.
JSC «Concern «CSRI «Elektropribor», St. Petersburg, Russia
В статье приводится описание разработанного программного эмулятора гидроакустического канала,
позволяющего оценивать качество функционирования гидроакустических модемов в условиях
многолучевого канала распространения сигнала, доплеровских искажений и влияния помехи.
The article describes the developed software emulator of the hydroacoustic channel which makes it possible to
assess the quality of the hydroacoustic modems in the conditions of a multipath signal propagation, Doppler
distortion and interference effects.
Введение. Известно, что качество функционирования модемов гидроакустической связи
существенно зависит от гидроакустических условий (ГАУ), в которых распространяется
гидроакустический связной сигнал (ГСС), от скорости изменения расстояния между
корреспондентами и от отношения сигнал/помеха (ОСП) на входе приемного модема [1–5].
Поэтому оценка качества функционирования модемов в различных условиях является
актуальной задачей.
Учитывая, что испытания в реальных морских условиях являются весьма трудоемкими и
дорогостоящими, в работе [6] предложено испытания модемов проводить с использованием
программного эмулятора гидроакустического канала (ПЭГК).
Целью работы является описание разработанного авторами ПЭГК, предназначенного для
испытаний гидроакустических модемов как в лабораторных, так и в морских условиях.
Описание алгоритма функционирования ПЭГК. ПЭГК является программным
продуктом, размещенным на ПЭВМ. Входными данными для него являются:
1) ГСС в формате .wav, поступающий с выхода передающего модема;
2) параметры ГАУ в районе;
3) глубины источника и приемника сообщения и горизонтальная проекция расстояния
между ними;
4) скорость взаимного сближения (с минусом) либо удаления (с плюсом) источника и
приемника сообщения Vr ;
5) отношение мощности ГСС к мощности помехи в той же полосе частот на входе
приемного модема Qss .
На выходе ПЭГК формируется ГСС в формате .wav, прошедший волновод.
Алгоритм функционирования ПЭГК выглядит следующим образом:
1. Из связного сигнала в формате .wav, сформированного передающим модемом,
извлекается собственно цифровой ГСС uss ( ti ) и его параметры (частотный диапазон, частота
дискретизации и т.п.).
2. Определяется длительность ГСС Tss =
N ss
.
fd
3. С использованием лучевой программы расчета поля гидроакустического источника,
входящей в комплекс программ [7], на интервале длительности ГСС рассчитывается
передаточный коэффициент волновода и динамика лучевой структуры ГСС, прошедшего через
гидроакустический канал.
4. Моделируется прохождение ГСС через гидроакустический канал, что достигается
путем суммирования в каждый момент времени ti N ray ( ti ) реализаций входного сигнала с
286
Методы прикладной гидроакустики
учетом относительного запаздывания, относительной интенсивности и доплеровского
сжатия/растяжения сигнальных лучей:
5.
uss / ch=
( ti )
N ray ( ti )
∑ K ray / j ( ti ) × uss / dop ( ti − ΔTray / j ( ti ) ), i = 1,..., N ss′ ,
(1)
j =1
где uss / ch ( ti ) — цифровой ГСС, дискретизированный с частотой fd, прошедший через
гидроакустический канал и приемный тракт; ΔTray / j ( ti ) — запаздывание j-го луча относительно
(
)
наиболее быстрого луча в момент времени tj; uss / dop ti − ΔTray / j ( ti ) — ГСС, пришедший на
вход антенны по j-му лучу в момент времени tj, сдвинутый по времени относительно наиболее
быстрого луча на величину запаздывания ΔTray / j ( ti ) и подвергшийся доплеровскому
сжатию/растяжению. Доплеровское сжатие/растяжение ГСС достигается путем интерполяции
излученного ГСС uss ( ti ) , отсчеты которого следуют с интервалом по времени Δt = 1 f d , на
моменты времени, следующие с интервалом времени Δtdop = Δt × 1 −
Vr
, где Czv — скорость
C zv
звука на глубине приемного модема. В результате частота дискретизации цифрового ГСС
uss / ch ( ti ) равна f d / dop = 1 Δtdop ; N ss′ =
Tss + ΔTmax
— количество временных отсчетов в
f d / dop
цифровом ГСС на выходе гидроакустического канала, а ΔTmax — запаздывание самого
медленного луча относительно самого быстрого луча.
6. Моделируется помеха unoise ( ti ) как белый шума в полосе ГСС с частотой
дискретизации f d / dop и длительностью Tss + ΔTmax с единичной мощностью Wnoise .
7. Вычисляется мощность цифрового ГСС uss / ch ( ti ) :
′
Wss / ch =
1 N ss 2
∑ uss / ch ( ti ) .
N ss′ i = 1
(2)
8. Путем
суммирования
ГСС,
прошедшего
гидроакустический
канал,
с помехой с учетом заданного отношения сигнал/помеха Qss моделируется выходной цифровой
сигнал эмулятора:
uout ( ti )=
Qss × Wnoise
× uss / kanal ( ti ) + unoise ( ti ) , i = 1,..., N ss′ .
Wss / ch
(3)
В ПЭГК предусмотрен режим самоконтроля, в котором все описанные стадии
моделирования выполняются с использованием ГСС, сформированного самим эмулятором в виде
белого шума в заданной полосе частот.
Методика испытаний модемов. Структура стенда для испытаний модемов
гидроакустической связи приведена на рис. 1. Модемы в виде изделия либо в форме
программного продукта поставляются разработчиками модемов. Остальные блоки являются
принадлежностью стенда.
287
Методы прикладной гидроакустики
Рис. 1. Структурная схема стенда для оценки качества модемов гидроакустической связи
Рис. 2. Зависимости количества успешно принятых пакетов от ОСП
и радиальной скорости на дистанции 11 км в мелком море
Работа стенда выглядит следующим образом. Оператором задаются и загружаются в ПЭГК
параметры моделируемого эпизода.
В качестве показателя качества модема применяются:
− вероятность битовой ошибки;
− процент успешно принятых сигнальных пакетов.
Подготовленное сообщение в виде бинарного файла поступает на вход передающего
модема. Модулированный ГСС с выхода передающего модема в формате .wav поступает на вход
ПЭГК, где он подвергается описанной выше трансформации в соответствии с заданными
гидроакустическими и помехосигнальными условиями. С выхода ПЭГК ГСС в формате .wav
передается на вход приемного модема. Демодулированное принятое сообщение в виде двоичного
файла подается на вход программы оценки качества модема, где осуществляется побитовое
сравнение исходного и принятого двоичного сообщения с вычислением количества битовых
ошибок в принятом сообщении.
Во втором случае формируется несколько пакетов сообщений с вычислением контрольной
суммы каждого пакета. Каждый пакет пропускается через ПЭГК и затем подается на вход
программы оценки качества модема, где производится сравнение контрольной суммы
демодулированного сообщения с контрольной суммой исходного сообщения. В случае их
совпадения пакет считается успешно принятым.
Для получения статистически устойчивых оценок качества процедуры повторяются
заданное число раз в автоматическом режиме с вычислением средних показателей.
На рис. 2 в качестве примера приведены зависимости количества успешно принятых
пакетов на дистанции 11 км в мелком море в зависимости от ОСП и радиальной скорости.
288
Методы прикладной гидроакустики
Заключение. Разработанный программный эмулятор гидроакустического канала
позволяет оценивать качество функционирования гидроакустических модемов в лабораторных
условиях и, в частности, проверять их на устойчивость к воздействию на ГСС шумов моря,
многолучевого распространения и доплеровских искажений. Также ПЭГК может быть
использован для проведения морских испытаний путём моделирования канала,
соответствующего большому расстоянию между источником и приёмником сообщений при их
фактическом расположении недалеко друг от друга.
При этом необходимо учитывать ограничения разработанного эмулятора, которыми
являются допущение о неизменности ГАУ по трассе распространения ГСС и неучёт случайных
флюктуаций параметров канала распространения сигнала.
Литература
1. Захаров Ю. В., Коданев В. П. Экспериментальные исследования акустической системы передачи
информации с шумоподобными сигналами // Акустический журнал. 1994. Т. 40, № 5. С. 799–808.
2. Курьянов Б. Ф., Пенкин М. М. Цифровая акустическая связь в мелком море для океанологических
применений // Акустический журнал. 2010. Т. 56, № 2. С. 245–255.
3. Голубев А. Г. Методы повышения эффективности систем цифровой связи с шумоподобными
сигналами. СПб.: Буквально, 2019. 317 с.
4. Кебкал К. Г., Машошин А. И., Мороз Н. В. Пути решения проблем создания сетевой подводной
связи и позиционирования // Гироскопия и навигация. 2019. Т. 27, № 2 (105). С. 106–135.
5. Кебкал К. Г., Кебкал В. К., Кебкал А. Г. и др. Экспериментальная оценка характеристик цифровой
подводной сети на основе гидроакустических модемов с программным каркасом EviNS // Гироскопия и
навигация. 2018. Т. 26, № 3(102). С. 121–135.
6. Мелентьев В. Д., Садовский А. Ф. Моделирование канала гидроакустической связи для
обоснования выбора сигналов // Гидроакустика. 2021. Вып. 45(1). С. 29–33.
7. Программа для ЭВМ «Гидроакустические расчеты для станции шумопеленгования».
Свидетельство о государственной регистрации № 2021617661 от 26.04.2021.
289
Методы прикладной гидроакустики
ОЦЕНКА ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ОБЪЕКТА
В МОМЕНТ ЕГО ОБНАРУЖЕНИЯ
А. В. Гриненков, А. И. Машошин, д-р техн. наук
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
ASSESSMENT OF THE ACCURACY OF DETERMINING THE DISTANCE
TO AN OBJECT AT THE TIME OF ITS DETECTION
A. V. Grinenkov, A. I. Mashoshin, Dr.Sc.
JSC «Concern «CNRI «Electropribor», St. Petersburg, Russia
В статье исследуется точность определения дистанции до подводного источника шума на предельной
дистанции его обнаружения с использование алгоритма, основанного на энергетическом и спектральном
методах.
The article examines the accuracy of determining the distance to an underwater noise source at the maximum
detection distance using an algorithm based on energy and spectral methods.
Введение. Целью работы является оценка точности определения дистанции до цели на
предельной дистанции её обнаружения в условиях сплошной акустической освещённости с
использованием энергетического и спектрального методов по данным режима
шумопеленгования типового ГАК ПЛ.
Обоснование алгоритма. Совместное применение энергетического (по абсолютному
уровню сигнала объекта) и спектрального (по наклону спектра сигнала объекта) методов в ГАК
ПЛ реализуется путём измерения абсолютных уровней сигнала объекта в нескольких (как
правило, трёх) частотных диапазонах (ЧД) режима шумопеленгования. Соответствующая
стохастическая модель имеет вид:
Ŵk Wk ( P0 ,r ) + ∆Wk , k=1,...,M ,
=
(1)
где Ŵk — оценка уровня сигнала объекта в k -м ЧД, дБ; M — количество ЧД в режиме
шумопеленговния; Wk ( P0 ,r ) — неслучайная функция связывающая истинное значение уровня
сигнала объекта в k -м ЧД, дБ, с шумностью объекта P0 , дБ, и дистанцией до него r , км; ∆Wk
— относительная ошибка измерения уровня сигнала объекта в k -м ЧД, дБ, распределённая по
центрированному нормальному закону со среднеквадратическим отклонением (СКО) σ ∆Wk ,
вычисляемым по формуле:
2
+
+1
q
1
(
)
k
,
σ ∆Wk =
10 ⋅ lg 1 +
∆
⋅
⋅
q
f
T
k
k
k
(2)
в которой qk — отношение сигнал/помеха (по мощности) на выходе линейной части приёмного
тракта в k -м ЧД; ∆ f k ,Tk — ширина полосы частот, Гц, и время накопления, с, в k -м ЧД
соответственно.
Функция Wk ( P0 ,r ) представима в виде:
Wk ( P0 ,r ) =
P0 + K k ( r ) + H k ,
(3)
где K k ( r ) — передаточная характеристика гидроакустического канала распространения шума
290
Методы прикладной гидроакустики
объекта от точки излучения до входа приёмной антенны в k -м ЧД, дБ, вычисляемая по
приближённой формуле [1]:
(
)
(
)
K k ( r ) ≈ −20 ⋅ lg f ekvk + 10 ⋅ lg f вk − f нk − β f ekvk ⋅ r +
,
(4)
в которой f нk , f вk — нижняя и верхняя граничные частоты k -го ЧД; f=
ekvk
f нk ⋅ f вk —
(
)
+10 ⋅ lg A f ekvk ,r − 20 ⋅ lg r − 60,
эквивалентная
частота
k -го ЧД;
β(f)
—
частотная
зависимость
коэффициента
A ( f ,r ) — частотная
пространственного затухания в рассматриваемом районе моря;
зависимость аномалии распространения сигнала в функции дистанции, предполагаемой глубины
погружения объекта и глубины наблюдателя для рассматриваемого района моря;
H k — коэффициент передачи приёмного тракта ГАК в k -м ЧД, дБ.
Учитывая, что в правой части формулы (1) случайной величиной является только
относительная ошибка измерения уровня сигнала объекта в k -м ЧД ∆Wk , которые в разных ЧД
независимы, совместную условную (в зависимости от шумности объекта P0 и коэффициента
передачи K k ( r ) ) плотность распределения вероятностей (ПРВ) оценок уровня сигнала в M ЧД
можно записать в виде [2, 3]:
gWˆ ,...,Wˆ / P ,K ( r ),...,K ( r ) ( w1 =
,...,wM )
1
M
0
1
M
M
∏ g∆ ( w − P − K ( r ) − H ) ,
k =1
Wk
k
0
k
k
(5)
где g ∆Wk ( wk ) — ПРВ ошибки измерения уровня сигнала в k -м ЧД.
В результате максимально правдоподобную оценку дистанции можно получить путём
подстановки в формулу (5) оценок переменных
wk ,P0 ,H k и функции K k ( r ) и поиска
дистанции r , соответствующей её глобальному максимуму [2]:
(Wˆ − Pˆ − Kˆ ( r ) − H ) ,
I ⋅
2
M
R̂opt arg min ∑ k
=
r
k
0
k
k
σ ∆2W
k =1
(6)
k
где I k — индикаторы обнаружения шума объекта в каждом ЧД, принимающие значение 1 при
наличии обнаружения и 0 при его отсутствии.
Принципиальным моментом для применения алгоритма (6) является получение оценки
шумности обнаруженного объекта P0 и передаточной характеристики K k ( r ) . Оценить шумность
обнаруженного объекта можно достаточно точно, если знать его класс и среднюю шумность
объектов этого класса в районе плавания [4]. Для большинства классов объектов распределение
шумности можно аппроксимировать нормальной ПРВ с некоторым средним значением и СКО
2,0−2,5 дБ.
Расчёт передаточной характеристики канала распространения сигнала в каждом ЧД K̂ k ( r )
осуществляется по формуле (4), в которой источником ошибок могут выступать частотная
зависимость коэффициента пространственного затухания, если она недостаточно точно
априорно измерена для района плавания, и аномалия распространения сигнала. Исследования
показали, что основным источником погрешностей расчёта аномалии выступают неточные
данные о гидроакустических условиях в районе (главным образом, вертикальное распределение
скорости звука), а также глубина объекта, если в качестве него выступает ПЛ.
291
Методы прикладной гидроакустики
Дистанция, км
12
10
8
Rist
ocR
ocRs
6
4
2
0
0
5
10
15
20
25
30
35
40
Время, мин
Рис. 1. Зависимости от времени истинной дистанции до ПЛ (линия зелёного цвета) и её мгновенных
(линия синего цвета) и сглаженных (линия красного цвета) оценок
Также исследования показали, что ошибка расчёта передаточной характеристики канала
хорошо аппроксимируется нормальной ПРВ с нулевым МО и СКО 1,5 дБ в случае надводного
объекта и 2,0 дБ в случае ПЛ. Следует заметить, что ошибки измерения уровня сигнала Wk ,
определяемые согласно (2), вносят наименьший вклад в ошибку определения дистанции до
объекта.
Моделирование алгоритма. Моделирование алгоритма выполнялось для условий
сплошной акустической освещённости в глубоком море. В качестве обнаруженного объекта
рассматривались атомная ПЛ и большой транспорт. Предполагалось, что их шумности для
района плавания распределены по нормальному закону с МО 62 и 107 дБ соответственно
и СКО 2 дБ.
Также предполагалось, что передаточная характеристика канала, рассчитываемая по
лучевой программе, имеет независящую от дистанции ошибку смещения, распределённую по
нормальному закону с СКО 2,0 дБ в случае ПЛ и 1,5 дБ в случае транспорта. Ошибки измерения
уровня сигнала моделировались с СКО (2).
На рис. 1 в качестве примера приведены зависимости от времени истинной дистанции до
ПЛ и её мгновенных (на одном цикле) и сглаженных по 20 циклам оценок.
Заключение. В результате исследования точности определения дистанции до цели на
предельной дистанции её обнаружения с использованием энергетического и спектрального
методов по данным режима шумопеленгования типового ГАК ПЛ установлено, что
относительные среднеквадратические ошибки определения дистанции до обнаруженного
объекта, усреднённые по всем возможным ситуациям наблюдения, не превышают 10 % при
обнаружении сильно шумящих объектов и 15−20 % при обнаружении малошумных объектов.
При этом в конкретных ситуациях ошибки определения дистанции могут достигать до 25 % при
обнаружении сильно шумящих объектов и до 40 % при обнаружении малошумных объектов.
Литература
1.Урик Р. Дж. Основы гидроакустики. Л.: Судостроение, 1978.
2. Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной неопределенности и
адаптация информационных систем. М.: Сов. радио, 1977.
3. Вентцель Е. С., Овчаров Л. А. Теория вероятностей и ее инженерные приложения. М.: Наука,
1988.
4. Охрименко С. Н., Мнакацанян А. А., Рубанов И. Л. Некоторые особенности шумоизлучения
объектов, обнаруживаемых при помощи гидроакустических средств // Научный вестник ОПК России.
2023. Вып.2. С. 51−56.
292
Методы прикладной гидроакустики
АЛГОРИТМ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ
ДВИЖЕНИЯ МОРСКИХ ОБЪЕКТОВ
А. В. Гриненков, А. И. Машошин, д-р техн. наук
АО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, Россия
THE ALGORITHM OF PASSIVE DETERMINATION OF COORDINATES
AND MOVEMENT PARAMETERS OF MARINE OBJECTS
A. V. Grinenkov, A. I. Mashoshin, Dr.Sc.
JSC «Concern «CNRI «Electropribor», St. Petersburg, Russia
Рассматривается автоматический алгоритм определения координат и параметров движения
обнаруженного морского объекта, не требующий специального маневрирования наблюдателя и
работоспособный при отсутствии изменения пеленга объекта.
An automatic algorithm for determining the coordinates and motion parameters of a detected marine object is
considered, which does not require special maneuvering of the observer and is operable in the absence of a change
in the bearing of the object.
Введение. Целью работы является изложение автоматического алгоритма определения
КПД по данным режима шумопеленгования ГАК ПЛ, не требующего специального
маневрирования носителя ГАК. Идея предлагаемого алгоритма изложена авторами в работе [1].
Обоснование алгоритма. Предлагаемый алгоритм является развитием известных
алгоритмов и состоит в автоматической выработке известными методами приближённых оценок
скорости, дистанции и курса объекта наблюдения и в максимально правдоподобном
"вписывании" их в модель динамики его пеленгов. При этом предполагается, что движение
обнаруженного объекта осуществляется галсами с постоянным вектором скорости на каждом
галсе. Изменение параметров движения объекта (т.е. смена галса) выявляется известными
методами [2]. Решение задачи при смене галса начинается заново с использованием в качестве
начальных приближений оценок КПД, полученных на предыдущем галсе.
В основе синтеза алгоритма лежит стохастическая модель движения объекта с постоянным
вектором скорости, имеющая вид
=
P̂i P ( ti ,K ,V ,R j ) + ∆ X i ,
(1)
(
)
где P̂i — оценка пеленга объекта в момент времени ti ; P ti ,K ,V ,R j — неслучайная функция,
связывающая фактическое значение пеленга объекта в момент времени ti с его курсом K ,
скоростью V и дистанцией R j в произвольный момент времени t j ; ∆ Pi — ошибка оценки
пеленга P̂i , распределённая по центрированному нормальному закону со среднеквадратическим
отклонением (СКО) σ P .
Если зафиксировать в правой части формулы (1) значения курса, скорости и дистанции
объекта, то единственной случайной величиной останется только ошибка измерения пеленга
∆ Pi . В результате совместная условная плотность распределения вероятностей (ПРВ) оценок
пеленга в моменты времени ti с учётом независимости ошибок их измерения запишется
в виде [3]:
g Pˆ ,...,Pˆ / K ,V ,R ( =
p1 ,..., pN )
1
N
j
∏ g∆ ( p − P ( t ,K ,V ,R ) ) ,
N
i =1
Pi
i
i
j
(2)
где g ∆Pi ( p ) — ПРВ ошибки измерения пеленга на i -м цикле решения задачи, являющаяся
нормальной ПРВ с нулевым МО и СКО σ Pi .
293
Методы прикладной гидроакустики
Для определения скорости, курса и дистанции объекта в режиме шумопеленгования
принципиально необходимо знание его класса. Для каждого района плавания с использованием
справочников и статистических данных определяются средние значения и среднеквадратические
разбросы скорости и шумности объектов каждого класса ω , объекты которого могут быть
обнаружены в данном районе. Имея эти данные, определение КПД обнаруженного объекта
осуществляется для каждого класса, характерного для района плавания, с последующим
выбором КПД, которые соответствуют фактическому классу объекта, определённому в
результате его классификации.
При таком подходе ПРВ скорости обнаруженного объекта можно записать в виде:
gV / ω ( v ) = norm ( v mVω ;sVω ) ,
(3)
где norm ( v mVω ;sVω ) — нормальная ПРВ аргумента v с МО mVω и СКО sVω .
Курс объекта может быть вычислен по формуле:
V
K =−
K ρ arcsin н ⋅ sin ( K ρ − K н ) ,
V
(4)
где K ρ — относительный курс объекта, вычисляемый по трём пеленгам по формуле:
K ρ = arctg
sin ( Pk − P1 ) ⋅ ( t N − tk ) ⋅ sin ( PN ) − sin ( PN − Pk ) ⋅ ( tk − t1 ) ⋅ sin ( P1 )
,
sin ( Pk − P1 ) ⋅ ( t N − tk ) ⋅ co s ( PN ) − sin ( PN − Pk ) ⋅ ( tk − t1 ) ⋅ co s ( P1 )
(5)
в которой P1 ,Pk ,PN — пеленга объекта из массива пеленгов P1 ,...,PN , измеренных на одном галсе
прямолинейного движения объекта в моменты времени t1 ,...,t N , причём для повышения точности
оценки курса объекта пеленг Pk , соответствующий времени tk , должен быть примерно равным
среднему арифметическому из пеленгов P1 и PN .
Дистанцию до цели будем определять на основе совместного применения энергетического
(по абсолютному уровню сигнала объекта) и спектрального (по наклону спектра сигнала объекта)
методов [4]. Эти методы реализуются путём измерения уровней сигнала объекта в M (как
правило, трёх) частотных диапазонах (ЧД) режима шумопеленгования. Соответствующая
стохастическая модель имеет вид:
Wk ( P0 ,r ) =P0 + K k ( r ) + H k + ∆Wk , k=1,...,M ,
(6)
где Wk ( P0 ,r ) — неслучайная функция, связывающая фактическое значение уровня сигнала
объекта в k -м ЧД, дБ, с шумностью объекта
P0 , дБ, и дистанцией до него r , км;
K k ( r ) — передаточная характеристика гидроакустического канала распространения шума
объекта от точки излучения до входа приёмной антенны в k -м ЧД, дБ [5];
H k — коэффициент передачи приёмного тракта ГАК в k -м ЧД, дБ; ∆Wk — относительная
ошибка измерения уровня сигнала объекта в k -м ЧД, дБ, распределённая по нормальному закону
с нулевым математическим ожиданием и среднеквадратическим отклонением σ ∆Wk .
В результате максимально правдоподобную дистанцию до объекта можно определить при
помощи алгоритма [3]:
294
Методы прикладной гидроакустики
(Wˆ − Pˆ − Kˆ ( r ) − H ) .
2
M
R̂opt = arg min ∑
r
k
0
k
k
(7)
σ ∆2W
k =1
k
Используя (2)−(7), получаем алгоритм определения КПД обнаруженного объекта:
( Kˆ ,Vˆ ,Rˆ )
opt
opt
opt / j
(
)
2
2
2
r−R
N
pi − P ( ti ,k ,v,rj )
v − mVω )
(
(
opt / ω )
= arg min
+
+∑
. (8)
2
v ,r
σ P2i
sVω2
i =1
σ Ropt / ω
Заметим, что описанный подход позволяет определить КПД и тогда, когда пеленг объекта
не изменяется во времени. В этом случае в качестве оценки скорости объекта используется
наиболее вероятное её значение для рассматриваемого класса объектов, в качестве
относительного курса принимается обратный пеленг объекта, курс объекта вычисляется по
формуле (4), дистанция до объекта определяется по формуле (7).
Заключение. Идея, положенная в основу предложенного алгоритма определения КПД, не
требующего специального маневрирования наблюдателя, состоит в привлечении для решения
задачи оценок скорости, курса и дистанции объекта, полученных разными методами с учётом
класса объекта.
Проведённое моделирование позволило оценить среднеквадратические ошибки
определения КПД. Показано, что при обнаружении объекта на дистанции до 30 км (скорость
изменения пеленга в этом случае составляет 0,5−1,0 град/мин и более) установившиеся значения
среднеквадратических ошибок определения КПД лежат в пределах: курса 5°−7°; скорости
1,0−1,5 м/с; дистанции 2−3 км.
При обнаружении объекта на больших дистанциях, когда скорость изменения пеленга не
превышает 0,1 град/мин, и задача решается с использованием алгоритма, не использующего
динамику изменения пеленга, среднеквадратические ошибки определения КПД лежат в
пределах: курса 5°−30°; дистанции до 20 %; среднеквадратическая ошибка скорости равна
величине среднеквадратического разброса скорости объектов соответствующего класса.
Литература
1. Гриненков А. В., Машошин А. И., Саватеев К. Ф. Алгоритм автоматического определения
координат и параметров движения целей без специального маневрирования наблюдателя // Морская
радиоэлектроника. 2014. № 4(50). С. 50−57.
2. Поляк Г. Л. Определение факта маневра цели // Морской сборник. 1989. № 4.
3. Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной неопределенности и
адаптация информационных систем. М.: Сов. радио, 1977.
4. Машошин А. И. Синтез оптимального алгоритма пассивного определения дистанции до объекта
// Морская радиоэлектроника. 2012. № 2(40). С. 30−34.
5. Урик Р. Дж. Основы гидроакустики. Л.: Судостроение, 1978.
295
Методы прикладной гидроакустики
ОСОБЕННОСТИ ФОРМИРОВАНИЯ ГИДРОАКУСТИЧЕСКОГО ПОЛЯ
В ДАЛЬНИХ ЗОНАХ АКУСТИЧЕСКОЙ ОСВЕЩЕННОСТИ ОТ ИСТОЧНИКОВ
ШУМОИЗЛУЧЕНИЯ, НАХОДЯЩИХСЯ У ПОВЕРХНОСТИ МОРЯ
С. А. Ермаков1, И. Е. Лободин2, д-р техн. наук
1
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
2
ВУНЦ ВМФ «Военно-морская академия», Санкт-Петербург, Россия
FEATURES OF FORMATION OF THE HYDROACOUSTIC FIELD IN DISTANT ZONES
OF ACOUSTIC ILLUMINATION FROM THE SOURCES OF NOISE EMISSION
WHICH ARE LOCATED NEAR THE SURFACE OF THE SEA
S. A. Ermakov1, I. E. Lobodin2, Dr.Sc.
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
The Naval Research Center of Electronics, St. Petersburg, Russia
В работе рассмотрены условия возникновения дальних зон акустической освещённости от
приповерхностных источников шумоизлучения и особенности формирования в них гидроакустического
поля в вертикальной плоскости. Оценены характеристики элементов звукового поля в зависимости от
типа вертикального распределения скорости звука и глубины погружения приёмной системы. Обоснована
возможность использования этих характеристик для решения задачи локализации шумящих морских
объектов.
The paper considers the conditions of existence of various numbers from near-surface sources of noise emission
in distant zones of acoustic illumination and features of formation of the hydroacoustic field in vertical plane in
them. Characteristics of sound field elements depending on the type of vertical distribution of sound velocity and
depth of immersion of reception system are estimated. The possibility of use of these characteristics for the solution
of a problem of localization of noisy sea objects is proved.
Особенности формирования гидроакустического поля в дальних зонах акустической
освещенности (ДЗАО), в том числе от приповерхностных источников шумоизлучения,
рассматривались в многочисленных отечественных и зарубежных работах [1−9]. В зарубежной
литературе и в ряде случаев в отечественной литературе ДЗАО называют зонами конвергенции
(convergence zones — зонами сходимости лучей). ДЗАО представляет собой пространственную
область в толще воды, формируемую звуковыми лучами, выходящими, за счёт рефракции, на
горизонт приёмника после полного внутреннего отражения в глубинных слоях ниже оси
подводного звукового канала (ПЗК).
Таким образом, необходимыми условиями существования поверхностных ДЗАО являются
наличие в океане ПЗК и превышение скорости звука у дна над скоростью звука у поверхности
моря либо над скоростью звука на нижней границе приповерхностного звукового канала (ППЗК).
Эти условия существуют в большинстве глубоководных районов Мирового океана.
Рассмотрим особенности формирования гидроакустического поля в ДЗАО при
вертикальном распределении скорости звука (ВРСЗ) (рис. 1, 2), характерном для Атлантического
океана в акватории юго–западнее Гибралтарского пролива (30° с.ш., 25° з.д.).
Расположим источник излучения на глубине 10 м, а приёмники — на глубинах 100 м. и
400 м. Значения скорости звука на горизонтах расположения источника Нист. и приёмников Нпр1
н Нпр2, на поверхности моря Нпов., на нижней границе ППЗК НППЗК и у дна Ндна, необходимые для
расчёта критических углов прихода лучей на горизонт приёмника сведены в табл. 1.
Таблица 1
Скорость звука на заданных горизонтах
Н, м
С, м/с
ВРСЗ сентябрь
ВРСЗ декабрь
Нист.
10
1536,2
1526,8
Нпр1
100
1522,1
1522,9
296
Нпр2
400
1511,4
1510,8
Нпов.
0
1536,4
1526,6
НППЗК
50
−
1527,6
Ндна
5426
1554
1554
Методы прикладной гидроакустики
Рис. 1. ВРСЗ сентябрь
Рис. 2. ВРСЗ декабрь
Воспользовавшись законом Снеллиуса найдём углы прохода лучей, коснувшихся дна моря
φдно, поверхности моря φпов и горизонта источника φист в вертикальной плоскости (табл. 2).
Критические углы прихода лучей в вертикальной плоскости
Нпр, м
100
400
ВРСЗ
сентябрь
декабрь
сентябрь
декабрь
φдно
±11,6º
±11,5º
±13,4º
±13,5º
φпов
±7,8º
±4,5º
±10,4º
±8,5º
Таблица 2
φист
±7,8º
±4,5º
±10,3º
±8,5º
Расчёты по расстоянию проводились для первой и второй ДЗАО. На графиках углового
спектра сигнала нанесены углы отрыва лучей от дна океана, выше и ниже которых начинают
приходить лучи, отражённые от дна (рис. 3).
297
Методы прикладной гидроакустики
а
б
Рис. 3. Угловой спектр и аномалия распространения
а — Нист = 10 м, Нпр = 100 м; б — Нист = 10 м, Нпр = 400 м
Рис. 4. Потери распространения сигнала от источника излучения, находящегося на глубине 10 м
На рис. 3 приведены обозначения семейств лучей, которыми формируются ДЗАО
(«НН» — лучи, вышедшие из источника вниз и пришедшие к приёмнику снизу, «ВН» — лучи,
298
Методы прикладной гидроакустики
вышедшие из источника вверх и пришедшие к приёмнику снизу, «НВ» — лучи, вышедшие из
источника вниз и пришедшие к приёмнику сверху, «ВВ» — лучи, вышедшие из источника вверх
и пришедшие к приёмнику сверху).
Из рис. 3 видно, что сектора углов приходящих лучей в вертикальной плоскости от
приповерхностного источника в ДЗАО разделяются на формируемые сверху лучами семейств
«НВ» и «ВВ» и снизу лучами семейств «НН» и «ВН». Разнос этих секторов углов прихода лучей
и значение их границ можно регулировать за счета выбора глубины погружения приёмника.
Ближняя граница ДЗАО формируется лучами, приходящими снизу, а дальняя граница — лучами,
приходящими сверху и с увеличением глубины приёмника ДЗАО разделяется на полузоны,
образованные лучами, приходящими снизу и сверху (рис. 4).
Эти особенности формирования акустического поля в ДЗАО позволяют использовать их
для решения задачи локализации шумящих морских объектов, а именно определять направление
их движения и номер ДЗАО, в которой находится источник.
Литература
1. Агеева Н. С., Райская Л. С. Звуковой поле в океане в зоне конвергенции // Морское
приборостроение. 1972. Сер. III, вып. 1.
2. Акустика океана / Под ред. Л. М. Бреховских. М.: Наука, 1974.
3. Галкин О. П., Швачко Л. В., Харченко Е. А., Комисарова Н. Н., Дымшиц А. М. Особенности
угловой и энергетической структуры звукового поля в океанических зонах конвергенции // Акустика в
океане. М.: Наука, 1992. С. 114−127.
4. Швачко Л. В. О многолетней стабильности структуры звукового поля в центральной части
Восточной Атлантики // Акустический журнал. 2002. Т. 48, № 3. С. 412−424.
5. Швачко Л.В. Структура звукового поля в зонах конвергенции в тропической части Тихого
океана // Акустический журнал. 2008. Т. 54. № 2. С. 272−282.
6. Hale F. E. Long-range sound propagation in the deep ocean // J. Acoust. Soc. Am. 1961. Vol. 33, № 4.
Р. 456–464.
7. Urick R. J. Caustics and convergence zones in deep-water sound transmission // J. Acoust. Soc. Am.
1965. Vol. 38, № 2. Р. 348−358.
8. Urick R. J., Principles of Underwater Sound, 3rd edn., New York: McGraw-Hill, 1983.
9. Jensen F. B., Kuperman W. A., Porter M. B., Smhmidt H. Computation Ocean Acoustics. Second Edition
// Modern Acoustics and Signal Processing. 2011.
299
Методы прикладной гидроакустики
АЛГОРИТМ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ
ШУМЯЩИХ ОБЪЕКТОВ ПРОСТРАНСТВЕННО-ЛУЧЕВЫМ МЕТОДОМ
ПРИ ЗОНАЛЬНОЙ СТРУКТУРЕ ГИДРОАКУСТИЧЕСКОГО ПОЛЯ
С. А. Ермаков1, И. Е. Лободин2, д-р техн. наук
1
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
2
ВУНЦ ВМФ «Военно-морская академия», Санкт-Петербург, Россия
ALGORITHM OF DETERMINATION OF COORDINATES AND PARAMETERS
OF THE MOVEMENT OF THE RUSTLING OBJECTS A SPACE-BEAM METHOD
AT ZONE STRUCTURE OF A HYDROACOUSTIC FIELD
S. A. Ermakov1, I. E. Lobodin2, Dr.Sc.
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
The Naval Research Center of Electronics, St. Petersburg, Russia
В работе представлен алгоритм определения координат и параметров движения надводных шумящих
объектов пространственно-лучевым методом в условиях существования дальних зон акустической
освещённости, которые наблюдаются в большинстве глубоководных районов Мирового океана.
Алгоритмы базируются на использовании закономерности поведения угла прихода в вертикальной
плоскости максимума энергии сигнала приповерхностного источника звука при его движении в дальней
зоне акустической освещенности.
This paper considers the algorithm of determination of coordinates and parameters of movement of surface noisy
objects using space-beam method in the conditions of existence of distant zones of acoustic illumination which are
observed in the majority of deep-water regions of the World Ocean. Algorithms are based on the use of behavior
regularity of angle of arrival in the vertical plane of energy maximum of near-surface sound source signal at its
movement in distant zone of acoustic illumination.
Для определения координат и параметров движения шумящих объектов в дальних зонах
акустической освещённости (ДЗАО), выходящих к поверхности моря, может быть использована
информация о моментах времени обнаружения сигналов на различных углах наклона
характеристики направленности антенны в вертикальной плоскости. Это связано с тем, что в
этих условиях акустическое поле формируется сигналами, приходящими на горизонт
расположения приемной антенны (далее приемник) по определённым семействам лучей,
имеющим закономерную цикличность [1−6]. Это лучи, вышедшие из источника вниз и
пришедшие к приёмнику снизу («НН»), вышедшие из источника вверх и пришедшие к
приёмнику снизу («ВН»), вышедшие из источника вниз и пришедшие к приёмнику сверху
(«НВ»), вышедшие из источника вверх и пришедшие к приёмнику сверху («ВВ»).
При взаимном перемещении приемника и источника разности расстояний, на которых
обнаруживаются в вертикальной плоскости сигналы, распространяющиеся по разным
семействам лучей, в одних случаях зависят от глубины погружения приемника, в других случаях
зависят только от глубины погружения источника, а в-третьих, случаях зависят только от номера
зоны, в которой может находиться источник.
Эти особенности распространения акустических волн в ДЗАО положены в основу
пространственно-лучевого метода определения координат и параметров движения шумящих
морских объектов.
Для реализации метода необходимо знание вертикального распределения скорости звука в
районе, расчёт элементов акустического поля в ДЗАО и формирование статического веера
характеристик направленности в вертикальной плоскости.
Покажем на примере возможности метода по определению координат и параметров
движения шумящих морских объектов.
На рис. 1 представлен расчёт траектории лучей для случая, когда глубина приёмника
больше глубины источника.
300
Методы прикладной гидроакустики
Рис. 1. Траектория лучей для Hr > Hs
В соответствии с лучевой теорией приращение горизонтальной составляющей расстояния в
каждом слое рассчитывается по формуле [2, 3]:
Ri −1 =
| H i + H i −1 |
,
ϕi + ϕi −1
tg
2
(1)
где H i , H i −1 — глубина залегания границ i, i–1-го слоя, м; φi, φi-1 — углы скольжения луча на
границах i, i–1-го слоя, град.
Углы скольжения луча на границах i, i–1-го слоёв вычисляются по формуле Снеллиуса:
cosϕi cosϕi −1
,
=
ci
cri−1
(2)
где ci, ci-1 — скорость звука на i, i-1-ом горизонте, м/с; cr — скорость звука на горизонте
приёмника, м/с.
Горизонтальное расстояние, проходимое лучами различных семейств, для симметричных
лучей семейства «ВВ» и «ВН», можно найти из выражений:
RBB= 2 R1 + R2 − R3 + ( N − 1) × R0 ;
(3)
RBH = R1 + R2 − R3 + ( N − 1) R0 ,
(4)
где R1 — горизонтальное расстояние, проходимое лучом, вышедшим с горизонта приёмника под
углом φ вверх и вернувшимся на этот горизонт сверху, км; R2 — горизонтальное расстояние,
проходимое лучом, вышедшим с горизонта приёмника под углом φ вниз и вернувшимся на этот
горизонт снизу, км; R3 — горизонтальное расстояние, проходимое лучом между горизонтом
источника и приёмника, км; R0=R1+R2 — цикл луча, км; N — число полных циклов луча,
совпадающее с номером ДЗАО.
301
Методы прикладной гидроакустики
Из выражений (3), (4) следует, что:
RBB − RBH =
R1 .
(5)
Измерив разность моментов времени обнаружения (потери) под симметричными углами в
вертикальной плоскости сигналов, находим скорость взаимного изменения расстояния между
источником и приемником:
VB =
R1
,
t BB − t HH
(6)
где tBB, tHH — моменты времени обнаружения (потери) сигнала;
Определяем номер ДЗАО:
∆R + ∆R1 ± ∆R3
N HH E HH
=
+ 0,5
∆R1 + ∆R2
(7)
и дистанцию до шумящего объекта:
(
)
∆R=
N HH R1ϕ 2 + R2ϕ 2 − R1ϕ 2 + R3ϕ 2 .
HHϕ 2
Блок-схема алгоритма действий, реализующего пространственно-лучевой
определения координат пространственно-лучевым методом представлен на рис. 2.
Рис. 2. Алгоритм определения дистанции и радиальной скорости
302
(8)
метод
Методы прикладной гидроакустики
Выводы
1. Изменение параметров пространственно-лучевой структуры акустического поля
надводного шумящего объекта в условиях ДЗАО, порождаемая взаимным перемещением
приёмника и надводным шумящим объектом, содержит информацию о координатах и
параметрах движения объекта.
2. Накопленная информация о временах обнаружения (потери) сигналов от надводного
шумящего объекта в двух развёрнутых на априорно рассчитанные углы (±φ) характеристик
направленности антенны приёмника, позволяет определять параметры движения шумящего
объекта (направление движения и относительную скорость изменения расстояния) и дистанцию
до него (номер ДЗАО, в которой обнаружен надводный шумящий объект и его местоположение
в ДЗАО).
Литература
1. Акустика океана / Под ред. А. Н. Бреховских // М.: Наука, 1974. 696 с.
2. Бреховских Л. М., Лысанов Ю. П. Акустика океана // Океанология. Физика океана. Том 2.
Гидродинамика океана. М.: Наука, 1978. 456 с.
3. Сташкевич А. П. Акустика моря. Л.: Судостроение, 1966. 354 с.
4. Урик Роберт Дж. Основы гидроакустики / Пер. с англ. Л.: Судостроение, 1978. 177 с.
5. Urick R. J. Caustics and convergence zone in deep-Water sound transmission / JASA. 1975. Vol. 38,
№ 2. Р. 248−258.
6. Jensen F. B., Kuperman W. A., Porter M. B., Smhmidt H. Computation Ocean Acoustics. Ed. Second //
Modern Acoustics and Signal Processing. 2011.
303
Методы прикладной гидроакустики
О ВЫБОРЕ КРИТЕРИЕВ ОЦЕНКИ КАЧЕСТВА ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ
ПРЕДИНДИКАТОРНЫХ ПРОЦЕССОВ В РЕЖИМЕ ШП
К. В. Катаев, О. О. Обуховская, А. А. Янпольская
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
CHOICE OF ASSESSMENT CRITERION OF QUALITY OF PREPROCESSING
OF PRELIMINARY INDICATOR PROCESSES IN PASSIVE LISTENING MODE
K. V. Kataev, О. О. Obukhovskaya, А. А. Yanpolskaya
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В данной статье рассматриваются различные подходы к выбору критериев оценки качества
предварительной обработки предындикаторных процессов в режиме ШП, при этом приводятся
конкретные критерии при использовании и рассматриваются примеры применения данных критериев при
пороговом обнаружении сигнала.
In the article different approaches to the choice of assessment criterion of quality of preprocessing of preliminary
indicator processes in passive listening mode are considered. At the same time specific criteria when using power
detectors are given and examples of application of these criteria at threshold detection of the signal are
considered.
Использование режима шумопеленгования (ШП) при малом отношении сигнал-шум
(ОСШ) предполагает использование достаточно трудоемкой процедуры обнаружения
первичных отметок цели и выделения полезного широкополосного сигнала на фоне помех.
Данная процедура, выполняемая в рамках предындикаторной обработки сигнала и
предваряющая алгоритмы трассового анализа, определяет возможность дальнейшей
качественной классификации цели, оценки параметров ее движения и других характеристик по
данным, полученным в результате пространственно-временного анализа первичного поля цели.
Таким образом, задача оценки качества алгоритмов предындикаторной обработки при помощи
формальных статистических критериев, имеет первостепенное значение и влияет на результат
всех последующих алгоритмов трассового анализа. Ниже будут рассмотрены общие принципы
построения таких критериев.
Для случая активной гидролокации, а также радиолокации предполагается существование
постоянной шумовой составляющей, на фоне которой в заранее неизвестный момент времени
возникает сигнал. При такой постановке задачи представляется возможным оценить
характеристики помехи и построить адаптивный обнаружитель, основанный на вероятности
ложной тревоги (ЛТ). Однако, применительно к режиму ШП принятый в активных
гидроакустических системах подход к оценке помехи невозможен, так как шумовой сигнал цели
может существовать во времени почти постоянно в одном пространственном канале (ПК).
В гидроакустике в качестве критерия оптимальности обнаружителя наиболее часто
рассматривается отношение «сигнал-шум» [1, 2]. В условиях ограничений на вычислительные
ресурсы в режиме ШП допустимо использовать простейший энергетический пороговый
обнаружитель, то есть некогерентное устройство обнаружения, которое принимает решение о
наличии или отсутствии сигнала на основании сопоставления измеренного значения энергии
принятого сигнала за время наблюдения с заданной пороговой величиной. Применение
обнаружителей данного типа обуславливается тем, что при таком подходе к построению
обнаружителя не требуется априорных знаний и дополнительных предположений об
обнаруживаемом сигнале. Далее будем рассматривать задачу построения критериев качества
именно для такого типа обнаружителей без учета вычислительных ресурсов.
Существует несколько подходов оценки фонового шума по множеству ПК: по одиночным
разверткам и по индикаторным картинам, с участием оператора и без него [3−7]. Однако, каждый
из рассматриваемых методов предусматривает процедуру предварительного центрирования и
нормирования разверток входного процесса относительно помехи. Алгоритм данной процедуры
может отличаться в зависимости от метода: например, при оценке статистических характеристик
шумовой составляющей может быть использован выделенный канал без сигнала или применен
суммарно-разностный метод при аддитивной обработке сигнала. Выбор той или иной процедуры
304
Методы прикладной гидроакустики
оценки шумовой составляющей обусловлен начальными предположениями о природе поля
помех: так алгоритмы оценки помехи по одному ПК в предположениях длительного наблюдения
и стационарного характера помехи рассматриваются в [8]; в [9] приводятся алгоритмы в
предположении изотропного поля помех; в [8, 10] описываются методы построения оценок по
множеству ПК на выходе традиционных или адаптивных схем формирования, однако без
рассмотрения критериев, позволяющих сравнить разные алгоритмы.
В случае анизотропного поля помех каждая фиксированная развертка по ПК может
рассматриваться как реализация нестационарного случайного процесса с изменением
статистических характеристик в отдельных ПК. При таком подходе оценку среднего уровня
помехи можно трактовать как выделение его тренда. Различные методы решения данной задачи
от простейших, основанных на применении оконных фильтров, до методов вайвлет-анализа,
существенно различаются вычислительной сложностью. В работах [10, 11] рассматривается
сравнение алгоритмов на основании критериев качества оценки отношения «сигнал-шум» для
обработки изображений в ситуации, когда априорная информация о помехе отсутствует. Однако,
в данных работах отсутствует сравнение алгоритмов оценки помехи на основе формальных
численных критериев, в частности, с точки зрения их влияния на алгоритмы обнаружения
сигналов.
Естественными критериями качества предварительной обработки входного процесса
являются оценки среднего значения и флюктуаций (СКО) поля помех. Данные статистические
характеристики помехи определяют выбор порога и, таким образом, непосредственно влияют на
качество работы энергетического обнаружителя.
Теоретически флюктуации помехи однозначно определяются ее средним значением,
временем накопления и эквивалентной частотной полосой. Поскольку фактически оценку СКО
приходится определять по коррелированным ПК, то необходимо ввести критерии не только для
среднего значения шума, но и по оценкам ее флюктуаций.
Качество оценки среднего значения и флюктуаций уровня помехи в предположении, что
поле помех может быть анизотропным по пространству, может определяться одной из
следующих статистических характеристик: средней и среднеквадратичной оценками смещения
(СКО), а также оценкой, учитывающей устойчивость системы во времени.
При этом:
1) (а) средняя и среднеквадратичная оценка смещения уровня помехи определяются
соответственно формулами:
2)
∆s1 ( ПК i , t ) =
Ε ( U изм ( ПК i , t ) − U ист ( ПК i , t ) ) ;
(
∆s2 ( ПК i , t ) =
Ε (U изм ( ПК i , t ) − U ист ( ПК i , t ) )
2
),
где U изм ( ПК i , t ) — оценка уровня помехи в i-ом пространственном канале в момент t;
U ист ( ПК i , t ) — истинное значение уровня в i-ом пространственном канале, которое
определяется либо при проведении модельных исследований, либо при полностью
контролируемом натурном эксперименте;
(б) средняя и среднеквадратичная оценка смещения СКО для уровня помехи
определяются соответственно формулами:
∆Ds1 ( ПК i , t ) =
Ε ( DU изм ( ПК i , t ) − DU ист ( ПК i , t ) ) ;
(
∆Ds2 ( ПК i , t ) =
Ε ( DU изм ( ПК i , t ) − DU ист ( ПК i , t ) )
305
2
),
Методы прикладной гидроакустики
где DU изм ( ПК i , t ) — оценка СКО уровня помехи в i-ом пространственном канале;
DU ист ( ПК i , t ) — истинное значение СКО уровня в i-ом пространственном канале;
3) (а) устойчивость оценки среднего определяется следующим образом:
4)
Ds ( ПК i ) =
(
Ε (U изм ( ПК i , t ) − Ε (U изм ( ПК i , t ) ) )
2
);
(б) устойчивость оценки СКО помехи определяется формулой:
Dd ( ПК i ) =
(
Ε ( DU изм ( ПК i , t ) − Ε ( DU изм ( ПК i , t ) ) )
2
).
Стоит отметить, что во всех выше рассмотренных критериях функция математического
ожидания (E) выполняется по ансамблю или по времени на интервале стационарности помехи.
Критерий устойчивости позволяет оценить статистики алгоритмов принятия решения, а не
только среднее значение ЛТ и Рпр (вероятности правильного обнаружения).
В качестве обобщенных критериев при оценке конкретного метода прединдикаторной
обработки можно рассматривать усреднение предложенных выше критериев по всем
пространственным каналам. В случае сильной нестационарности поля помех вместо
предложенных критериев представляется более рациональным перейти к относительным
оценкам: например, вместо средней оценки ∆s1 ( ПК i , t ) из пункта 1(а) стоит рассматривать
следующую оценку:
∆s1 ( ПК i , t ) =
Ε ( U изм ( ПК i , t ) − U ист ( ПК i , t ) ) U ист ( ПК i , t ) .
Рис. 1. Значения вероятности ЛТ и Рпр для уровня сигнала s, при пороге обнаружения
Робн=2 в зависимости от смещения оценки значения СКО (ось x)
и от смещения оценки среднего значения помехи (ось y)
306
Методы прикладной гидроакустики
Кроме реализации порогового энергетического обнаружителя предындикаторная
обработка должна обеспечивать измерение уровня обнаруженного сигнала и оценку направления
в выбранной системе координат, например, оценку курсового угла (КУ). Для этого принято
использовать различные методы интерполяции, позволяющие уточнить дискретные оценки по
ПК. При этом реально оценивается уровень смеси сигнала с помехой и пересчитывается уровень
сигнала. Рассматривая оценки смещения и флюктуации для оценок уровней обнаруженных
сигналов и их КУ, получим набор критериев, позволяющих сравнивать различные алгоритмы
предварительной обработки. Следует отметить, что предложенные оценки позволяют оценить
реальные вероятностные характеристики пороговых энергетических обнаружителей, учитывая
ошибки определения порогов.
В качестве примера использования предложенных критериев для разных уровней сигналов
на рис. 1 приведены графики значения вероятности ЛТ и Рпр для локальных экстремумов помехи
в зависимости от смещения оценок статистических характеристик помехи.
Предложенные критерии могут использоваться при проведение модельных экспериментов
в конкретных сигнально-помеховых и тактических ситуациях. В дальнейшем предполагается
рассмотреть вопрос создания универсального обобщенного критерия.
Литература
1. Малышкин Г. С. Оптимальные и адаптивные методы обработки гидроакустических сигналов.
Том 1. СПб.: ГНЦ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. 400 с.
2. Горбань И. И. Обработка гидроакустических сигналов в сложных динамических условиях. Киев:
Наук. думка, 2008. 75 с.
3. Камп Л. Подводная акустика / Пер. с англ. М.: Мир, 1972.
4. Применение цифровой обработки сигналов / Пер. с англ., под ред. Э. Оппенгейма. М.: Мир, 1980.
5. Корякин Ю. А., Смирнов С. А., Яковлев Г. Н. Корабельная гидроакустическая техника: состояние
и актуальные проблемы. СПб.: Наука, 2004.
6. Банк М. У. Параметры бытовой приемно-усилительной аппаратуры и методы их измерения. М.:
Радио и связь, 1982.
7. Method for increasing passive sonar operating distance by means of shallow sound field characteristics.
Patent CN №104765039(B), опубликован 13.06.2017.
8. Гусев В. Г. Системы пространственно-временной обработки гидроакустической информации. Л.:
Судостроение, 1988.
9. Иваненков А. С., Родионов А. А., Гурчин В. И. Оценка уровня фонового шума с помощью
горизонтальной антенной решетки // Акустический журнал. 2013. Т. 59, № 2. С. 202−210.
10. Патент RU 2 723 145 C1 Попова Ольга Степановна Янпольская Алиса Александровна Способ и
устройство обнаружения шумящих в море объектов бортовой антенной 2020 г.
11. Конюхов А. Л., Костевич А. Г., Курячий М. И. Критерии оценки отношения сигнал/шум в
активно-импульсных телевизионно-вычислительных системах // Доклады ТУСУРа. 2012. № 2(26), ч. 1.
С. 111−115.
307
Методы прикладной гидроакустики
МЕТОДИКА ПОСТРОЕНИЯ ОЖИДАЕМОЙ ЗОНЫ НАБЛЮДЕНИЯ
ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ В УСЛОВИЯХ ПРИМЕНЕНИЯ
ПРОТИВНИКОМ СРЕДСТВ ГИДРОАКУСТИЧЕСКОГО ПОДАВЛЕНИЯ
С УЧЕТОМ ВЛИЯНИЯ ГИДРОЛОГО-АКУСТИЧЕСКИХ УСЛОВИЙ
В. В. Малый1, д-р техн. наук, А. А. Корольков2, канд. воен. наук, А. Ибрахим2
1
2
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
ВУНЦ ВМФ «Военно-морская академия им. Н. Г. Кузнецова», Санкт-Петербург, Россия
METHODOLOGY FOR CONSTRUCTING OF THE EXPECTED SURVEILLANCE
ZONE FOR SONARS IN CONDITIONS OF THE HYDROACOUSTIC SUPPRESSION
WITH ACCOUNT OF HYDROLOGICAL-ACOUSTICAL CONDITIONS
V. V. Malyj1, Dr.Sc., A. A. Korolkov2, Ph.D., A. Ibrahim2
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
Naval Academy named after N. G. Kuznetsov, St. Petersburg, Russia
Рассмотрена методика оценки и визуализации изменения ожидаемой зоны наблюдения
гидроакустических средств освещения подводной обстановки в условиях применения средств
гидроакустического подавления (приборов помех) с учетом влияния гидролого-акустических условий.
Приведены примеры расчетов и визуализации изменения ожидаемых зон наблюдения для режима
гидролокации.
A methodology for assessing and visualizing changes in the expected observation zone for sonars in the conditions
of using hydroacoustic suppression means (jamming devices), taking into account the influence of hydrologicalacoustic conditions. Examples of calculations and visualization of changes in expected observation zones for
active sonar are given.
Одной из актуальных задач является оценка снижения эффективности гидроакустических
средств (ГАС) в условиях гидроакустического противодействия [1], а именно — применения
средств гидроакустического подавления — в виде приборов помех (ПП). При этом для
большинства традиционных моделей зон наблюдения (ЗН) и методик оценки эффективности
ГАС в условиях постановки искусственных шумовых помех — характерны существенные
ограничения. Во-первых, они позволяют проводить оценку лишь на энергетическом уровне, для
условий безграничной однородной среды (БОС). Во-вторых, не учитывают сложное
пространственное распределение вероятности правильного обнаружения (ВПО) Pпо(α, r) с
учетом влияния неоднородной среды и рабочих характеристик обнаружения (РХО) приемника
ГАС. При этом, как правило, они предназначены для оценки эффективности ГАС только в
режиме гидролокации (ГЛ).
Это обусловлено тем, что традиционные методики базируются на основе расчета и
построения только границ ЗН с помощью решения т.н. «уравнения противогидролокации» [2−4].
При заданном значении коэффициента подавления Kп* уравнение противогидролокации (для
условий режима прицельных по частоте помех Δfп ≈Δfпр) имеет вид
K п* Pc1 rп Rэ
2 Pп1 R (α )
10
0.05 β ( f0 )rп10−3
= r 210
0.1β ( f0 )r10−3
.
(1)
Лишь в отдельных работах [5] были предприняты попытки учесть влияние неоднородной
среды и реализовать визуализацию сложного пространственного распределения ВПО Pпо (α, r).
Предлагаемая методика позволяет оценивать снижение эффективности ГАС с учетом
влияния неоднородной среды и РХО Pпо(q) для конкретного типа приемника ГАС, причем как
для режима ГЛ, так и для режима шумопеленгования (ШП). Ниже приведен ее вариант для
режима ГЛ. Методика включает 5 основных этапов.
308
Методы прикладной гидроакустики
1. Расчет зависимости эффективного давления эхо-сигнала от расстояния до цели r в
неоднородной среде (на рабочей частоте ГЛС f0)
P R
−0.1β ( f0 )r10−3
,
Ps ( r ) = A(r ) 12 э 10
r 2
(2)
где A(r) — зависимость аномалии распространения (АР) звука от расстояния.
2. Расчет зависимости эффективного давления шумовой помехи, создаваемой ПП на входе
приемника ГЛС в зависимости от расстояния между ГЛС и ПП rп и направления наблюдения α,
с учетом приемной диаграммы направленности (ДН) R(α), при фиксированном значении
курсового угла (КУ) ПП βпп
Pпп( rп ,1,=
f0 ) (α , rп )
Pпп(1,∆f
,f )
пп 0
где
Pпп(1,1, f0 ) =
=
∆f пп
A(rп ) R (α + β пп )
Pпп(1,1, f0 )
rп
10
−0.05 β ( f0 )rп10−3
,
(3)
Wпп ρ с
— приведенное давление (Па), создаваемое ПП на рассто4π ⋅ ∆f пп
янии r0=1 м, ненаправленной антенной, в полосе Δf=1 Гц.
3. Расчет эффективного давления суммарной помехи на входе приемника ГЛС
=
PпΣ ( ГПД )(1, f ) (α , rп )
0
Pшм (1, f0 ) 2 + Pгп (1, f0 ) 2
γ ( f0 )
+ Pпп ( rп ,1, f0 ) (α , β пп , rп ) ,
2
(4)
где γ(f0) — коэффициент помехоустойчивости приемной антенны ГЛС; Pшм (1, f0 ) — спектральная
плотность давления (СПД) шумов моря (в полосе 1 Гц); Pгп(1, f0 ) — СПД собственной
гидродинамической помехи (в полосе 1 Гц), на рабочей частоте ГЛС.
4. Расчет зависимости выходного отношения сигнал/помеха (ОСП) (по давлению) [6, 7] от
расстояния до цели r, расстояния до ПП rп и направления наблюдения α
d ( ГПД ) (=
α , r , rп )
Ps ( r )
2 Es ( r )
2T .
=
NΣ
PпΣ ( ГПД )(1, f ) (α , rп )
(5)
0
5. Расчет пространственной зависимости ВПО Pпо(α, r) в соответствии с РХО Pпо(d)
конкретного обнаружителя ГЛС и типа сигнала при фиксированном значении вероятности
ложной тревоги (ЛТ) Pлт, для согласованного фильтра
(
)
Pпо(ГПД=
(α , r ) Φ d ( ГПД ) (α , r ) − Φ −1 (1 − Pлт ) .
)
(6)
На рис. 1 приведены примеры результатов расчетов и визуализации изменения ЗН ГЛС НК
в условиях БОС (рис. 1, а, б) и в условиях неоднородной среды (рис. 1, в, г).
На рис. 2 приведены: использованный в качестве исходных данных вид ВРСЗ (рис. 2, а);
результаты расчета зависимости АР от дистанции r (рис. 2, б) и вид ДН приемной антенны
типовой ГЛС НК на рабочей частоте (рис. 2, в).
309
Методы прикладной гидроакустики
а
б
в
г
д
Рис. 1. ЗН ГЛС НК в виде пространственного распределения ВПО Pпо(α, r)
а — в условиях БОС (энергетическая дальность действия D0=19 км, курс НК Kнк=0º), при наличии только
естественных помех; б — при дополнительном воздействии помехи, создаваемой ПП (КУпп=25°, rп=15 км);
в — в условиях неоднородной среды (ВРСЗ — рис. 2, а) при наличии только естественных помех;
г — при воздействии дополнительной помехи, создаваемой ПП; д — цветовая градация значений ВПО Pпо=0÷1,0
а
б
Рис. 2. Использованные при расчетах исходные данные
в
а — вид ВРСЗ; б — результаты расчета зависимости АР от дистанции; в — ДН приемной антенны ГЛС
Предлагаемая методика может быть использована при разработке перспективных
программных комплексов оценки эффективности систем освещения подводной обстановки
(с применением геоинформационных технологий) [8], а также в системах поддержки принятия
решений по освещению подводной обстановки в составе перспективных ГАК НК и ПЛ [9].
Литература
1. Хагабанов С. М. Защита гидроакустических средств в условиях гидроакустического
противодействия // Гидроакустика. 2012. Вып. 16. С. 70−76.
2. Ильин А. П. Теоретические основы радиоэлектронной борьбы // Учебник. СПб: ВУНЦ ВМФ
«Военно-морская академия», 2012. 483 с.
3. Осипов В. Ю., Ильин А. П., Фролов В. П., Кондратюк А. П. Радиоэлектронная борьба.
Теоретические основы // Учебное пособие. Петродворец: ВМИРЭ, 2006. 302 с.
310
Методы прикладной гидроакустики
4. Фролов В. П. Оценка эффективности РЭБ в боевых действиях подводных лодок ВМФ.
Петродворец: ВМИРЭ, 2002. 114 с.
5. Малый В. В., Есипов В. С., Шклярук О. Н. Методика оценки эффективности гидролокационных
средств освещения подводной обстановки в условиях гидроакустического подавления // Тр. ВМПИ.
Петродворец: ВМПИ, 2014. С. 96−101.
6. Ван-Трис Г. Теория обнаружения, оценок и модуляции. М.: Сов. радио, 1972. Т. 1. 744 с.
7. Сапрыкин В. А., Рокотов С. П. Теория гидроакустики и цифровая обработка сигналов. Часть 2.
Петродворец: ВВМУРЭ им. А. С. Попова, 1991. 415 с.
8. Ермолаев В. И. Оптимизация применения гидроакустических средств в условиях
пространственно-временной изменчивости океанической среды // Гидроакустика. 2023. Вып. 53(1).
С. 60−70.
9. Прокаев А. Н. Система поддержки принятия решений как основа для создания
интеллектуального гидроакустического комплекса // Гидроакустика. 2020. Вып. 43(3). С. 42−49.
311
Методы прикладной гидроакустики
МОДЕЛИ РАБОЧИХ ЗОН ЗАДАННОЙ ТОЧНОСТИ ПРИ ОПРЕДЕЛЕНИИ
МЕСТА ЦЕЛИ ПЕЛЕНГАЦИОННЫМ МЕТОДОМ ПОЗИЦИОННЫМИ
ГИДРОАКУСТИЧЕСКИМИ СРЕДСТВАМИ С ЛИНЕЙНЫМИ
ПРОТЯЖЕННЫМИ АНТЕННАМИ
В. В. Малый1, д-р техн. наук, П. Н. Волгин2, д-р воен. наук, М. С. Максимов2
1
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
2
ВУНЦ ВМФ «Военно-морская академия им. Н. Г. Кузнецова», Санкт-Петербург, Россия
MODELS OF WORKING ZONES WITH A SPECIFIED ACCURACY IN DETERMINING
A TARGET LOCATION BY DIRECTION-FINDING METHOD FOR POSITIONED
SONARS WITH LINEAR EXTENDED ANTENNAS
V. V. Malyj1, Dr.Sc., P. N. Volgin2, Dr.Sc., M. S. Maksimov2
1
JSC «Concern «Oceanpribor», St. Petersburg, Russia
2
Naval Academy named after N.G. Kuznetsov, St. Petersburg, Russia
Рассмотрены особенности результатов оценки места цели пеленгационным методом применительно к
позиционным гидроакустическим средствам с линейными протяженными антеннами. Исследовано
изменение зон равной ошибки места цели в зависимости от различных вариантов взаимной ориентации
линейных протяженных антенн двух соседних гидроакустических средств, приведены результаты
расчетов.
the features of the results of assessing the target location by the direction-finding method in relation to sonar
means with linear extended antennas. The change in the zones of equal error of the target location depending on
various options for the mutual orientation of the linear extended antennas of two adjacent hydroacoustic means
has been studied, and the results of the calculations are presented.
Пассивными гидроакустическими средств (ГАС), работающими в режиме
шумопеленгования (ШП), измеряется только пеленг на обнаруженную и сопровождаемую цель.
Однако в случае одновременного наблюдения цели двумя соседними позиционными ГАС
(ПГАС) текущие дистанции от каждой из них до сопровождаемой цели можно определить
пассивным пеленгационным методом [1, 2]. При этом место цели (МЦ) определяется как точка
пересечения двух прямых (линий пеленгов цели) (рис. 1).
Рис. 1. Графическая модель определения места цели пеленгационным методом
312
Методы прикладной гидроакустики
а
б
Рис. 2. Типовые ХН и зависимости ТП от КУ наблюдения для ГАС с ЛПА
а — вид ХН R(α, α0) для различных углов компенсации в полярных координатах; б — типовые зависимости ТП σα от
КУ наблюдения для ГАС с ЛПА: для амплитудного метода пеленгования — красная линия (1); для корреляционного
метода пеленгования — синяя линия (2)
Исходными данными, необходимыми для определения дистанций до цели R1 (от ГАС1) и
R2 (от ГАС2), являются текущие пеленга на цель П1 и П2, измеренные одновременно.
Соответственно, оценки дистанций до цели имеют вид
sin α 2
R1 = L
sin γ
sin α1
и R2 = L
,
sin γ
(1)
где L — расстояние между антеннами ГАС1 и ГАС2; γ=π‒(α1+α2) — угол между направлениями
на ГАС1 и ГАС2 из места цели.
Возникающая задача определения текущей ошибки места цели (ОМЦ), применительно к
классическому пеленгационному методу для двух наблюдателей c постоянной точностью
пеленгования (ТП) для всех направлений, эта задача хорошо исследована [1, 2]. Однако для
линейных протяженных антенн (ЛПА) или линейных дискретных эквидистантных антенн
(ЛДЭА), ТП сопровождаемой цели σα становится переменной и описывается достаточно сложной
функцией от угла наблюдения σα(α). На рис. 2 приведен пример характеристик направленности
(ХН) ЛДЭА R(α, α0) для различных углов компенсации α0, а также типовых зависимостей ТП σα
от курсового угла (КУ) наблюдения, определяемых зависимостью ширины ХН
компенсированной ЛДЭА θ0.7(α0).
Соответственно, задача определения текущего значения ОМЦ σrmin для ПГАС с ЛПА
становится более сложной, чем в классическом случае. Известно, что наиболее полное
представление о точности определения МЦ в конкретной точке на плоскости дает эллипс ошибок
заданной вероятности. Следовательно, наиболее полное представление о точности
гидроакустической системы наблюдения дает т.н. поле ошибок [1, 2]. Однако можно
ограничиться, хотя и менее полной, но зато более наглядной характеристикой точности
определения МЦ, каковой является ошибка места заданной вероятности PМЦ. Тогда район
наблюдения пассивной пеленгационной гидроакустической системы можно охарактеризовать
контурами заданной точности определения МЦ, т.е. контурами заданной величины ОМЦ σr (м)
при заданной вероятности PМЦ (нахождения цели в круге радиусом σr). Пространство,
ограниченное контурами постоянной точности определения МЦ σr=const, принято называть
рабочими зонами [1, 2]. В работе [1] показано, что при задании значения вероятности PМЦ>0,6
функции распределения ОМЦ при круговом и эллиптическом рассеивании мало отличаются друг
от друга. Поэтому целесообразно искать контуры постоянной точности определения МЦ из
условия σr=const. Вероятность того, что ОМЦ (с радиусом окружности r) не будет превосходить
величину σr — лежит в пределах PМЦ=0,63÷0,68; 2σr — в пределах PМЦ=0,95÷0,98.
313
Методы прикладной гидроакустики
При пеленгационном методе определения МЦ для пассивных ГАС с постоянной ТП σα,
выражение для СКО ОМЦ σr(R, α) имеет вид [1, 2]
σ r ( R, α ) =
R1 ( R,α )2 σα1 2 + R2 ( R,α )2 σα 2 2
sin ( γ ( R,α ) )
,
(3)
где σα1 и σα2 — постоянные ошибки измерения пеленга (ТП) ГАС1 и ГАС2 (в радианах).
Главное отличие методов оценки ОМЦ при слежении за целью двумя ПГАС с ЛПА — это
сложная функциональная зависимость ширины ХН ЛПА θ0,7(α0), от угла компенсации α0 и
аналогичная зависимость ТП σα(α) — от КУ сопровождаемой цели (рис. 2, б). Пространственная
зависимость ОМЦ σr(R, α) для ЛПА с переменной ТП становится более сложной, вычисляется и
строится в полярных координатах от угла α и расстояния R относительно середины расстояния
между двумя приемными антеннами ГАС1 и ГАС2 (точка 0 на рис. 1) в соответствии с
выражением [3]
σ r ( R, α ) =
R1 ( R,α )2 σα1 ( R,α ) 2 + R2 ( R,α ) 2 σα 2 ( R,α ) 2
L2
+ RL cos (α ) и R2 ( R, α )=
4
sin ( γ ( R,α ) )
,
(4)
L2
− RL cos (α ) — расстояния от ГАС1 и от
4
ГАС2 до цели для заданных значений α и R; γ ( R, α ) =
π − (α1 ( R, α ) + α 2 ( R, α ) ) — угол между
где R1 ( R, α )=
R2 +
R2 +
R ( R, α )2 + L2 − R2 ( R, α )2
и
2 R1 ( R, α ) L
направлениями на ГАС1 и ГАС2 из места цели; α1 ( R, α ) = arccos 1
R2 ( R, α )2 + L2 − R1 ( R, α )2
— направления с ГАС1 и с ГАС2 на цель для заданных
2 R2 ( R, α ) L
значений α и R; σα1 ( R, α ) = σα ( β1 ( R, α ) ) и σα 2 ( R, α ) = σα ( β 2 ( R, α ) ) , где β1 и β2 — КУ на цель с
α 2 ( R, α ) = arccos
ГАС1 и с ГАС2 — переменные точности (ошибки) пеленгования цели ЛПА ГАС1 и ГАС2 (рад)
(как функции от координат цели (R, α)).
На рис. 3 приведены примеры результатов вычисления σr(α,R) и построения рабочих зон
для ПГАС с цилиндрическими антеннами и постоянной ТП (3), рис. 3, а, б, а для ПГАС с ЛПА и
переменной ТП (4), рис. 3, в, г, (ЛПА ориентированы параллельно друг другу и перпендикулярно
линии, соединяющей их фазовые центры).
а
б
в
г
Рис. 3. Результаты расчета и визуализации зон равной ОМЦ для двух ПГАС (L=10 км)
а, б — с цилиндрическими антеннами и постоянной ТП (а — цвет, б — контуры);
в, г — с ЛПА и переменной ТП (в — цвет, г — контуры)
314
Методы прикладной гидроакустики
а
б
в
Рис. 4. Результаты расчетов и визуализации зон равной ОМЦ для ПГАС с ЛПА
ЛПА повернуты в различные стороны на один и тот же угол: а — ψ0 =±0°; б — ψ0 =±45°; в — ψ0 =±90°
На рис. 4, а−в приведены результаты расчетов и визуализации зон равной ОМЦ для
различных случаев взаимной ориентации ЛПА относительно перпендикуляра к линии «базы»,
соединяющей фазовые центры двух антенн.
Литература
1. Сайбель А. Г. Основы теории точности радиотехнических методов местоопределения (учебное
пособие). М.: Издательство оборонной промышленности, 1958. 55 с.
2. Лапшин В. П. Моделирование, оценка эффективности и оптимизация систем наблюдения ВМФ.
Л.: ВМА, 1982. 240 с.
3. Малый В. В., Максимов М. С. Особенности пеленгационного метода определения места цели
корабельными гидроакустическими средствами с буксируемыми линейными протяженными антеннами //
М.: Судостроение, 2023. № 6. С.54−58.
315
Методы прикладной гидроакустики
РАСПРОСТРАНЕНИЕ ЗВУКА НА АРКТИЧЕСКОМ ШЕЛЬФЕ ПРИ НАЛИЧИИ
НЕОДНОРОДНОСТЕЙ В СТРУКТУРЕ ДОННЫХ ОСАДКОВ
С. Д. Боджона1,2, А. А. Луньков1,2, канд. физ.-мат. наук, В. Г. Петников1, д-р физ.-мат. наук, Д. Д. Сидоров1
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
2
Московский государственный технический университет им. Н. Э. Баумана, Москва, Россия
1
SOUND PROPAGATION ON THE ARCTIC SHELF IN THE PRESENCE
OF INHOMOGENEITIES IN THE BOTTOM SEDIMENT STRUCTURE
S. D. Bodjona1,2, A. A. Lunkov1,2, Ph.D., V. G. Petnikov, Dr.Sc., D. D. Sidorov
1
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
2
Bauman Moscow State Technical University, Moscow, Russia
В рамках численного моделирования исследуется распространение низкочастотного звука на
арктическом шельфе с неоднородностями в структуре дна, включая локальные водоподобные области,
где скорость звука в дне близка к скорости звука в воде. Показано, что в таких областях можно ожидать
аномальное затухание звука, горизонтальную рефракцию и дополнительные осцилляции в спектре
регистрируемого звукового сигнала. Рассматриваются особенности формирования шумового поля
ветрового волнения в такой акватории. Моделирование проведено для мелководного участка Карского
моря.
A numerical simulation is applied to study low-frequency sound propagation on an arctic shelf with
inhomogeneities in the bottom structure including water-like areas where the sound speed in the bottom is equal
to the sound speed in water. Numeral experiments show abnormal sound attenuation, horizontal refraction, and
additional oscillations in the spectrum of the registered acoustic signal. The features of wind noise field formation
in this area are considered. The simulation is carried out for a shallow-water region in the Kara Sea.
На сегодняшний день арктический шельф является значимым объектом для исследований
в связи с глобальным потеплением. Освоение этого региона тесно связано с акустическими
методами исследований арктического шельфа, где распространение звука имеет ряд
особенностей. По результатам сейсмической разведки в одной из прибрежных областей Карского
моря глубиной около 30 м были получены данные о распределении скорости звука в верхнем
осадочном слое 𝑐𝑐𝑏𝑏 (𝑥𝑥, 𝑦𝑦, 𝑧𝑧) (см. рис. 1) [1]. Неравномерность распределения скоростей говорит о
неоднородности донной структуры выбранного участка. Характерной особенностью этой
структуры является присутствие локальных водоподобных областей, в которых скорость звука в
дне сопоставима со скоростью звука в водной толще 𝑐𝑐𝑏𝑏 ≈ 𝑐𝑐𝑤𝑤 . При этом плотность донных
осадков, как показало пробное бурение, остается больше, чем плотность воды. Присутствие
таких неоднородностей оказывает существенное воздействие на акустическое поле,
формируемое в подобных волноводах.
В работе приведены результаты численных исследований распространения
низкочастотного звука (до 1 кГц) в арктической шельфовой зоне с неоднородным дном,
показанным на рис. 1. Основное внимание уделено следующим акустическим эффектам,
связанным с присутствием участков водоподобных донных осадков: усиление затухания звука,
межмодовое взаимодействие на сосредоточенной неоднородности (проявляется в виде
осцилляций в спектре регистрируемого сигнала) и горизонтальная рефракция. Дополнительно
рассмотрены особенности формирования шумового поля ветрового волнения в таком волноводе.
Вычисление комплексной амплитуды звукового поля в отсутствие горизонтальной
рефракции проводилось методом широкоугольного параболического уравнения, а при её
наличии — методом модовых параболических уравнений.
В условиях неоднородной структуры дна проявляется сильная пространственная
изменчивость затухания звука в волноводе. В качестве примера на рис. 2 представлено
распределение средних по глубине потерь при распространении, 𝑇𝑇𝑇𝑇, на 5 км от источника звука
с частотой излучения 50 Гц в исследуемом районе. Трассы распространения звука, выбранные
для расчетов этого распределения, равномерно покрывали участок дна, показанный на рис. 1.
316
Методы прикладной гидроакустики
Рис. 1. Данные 3-D сейсморазведки для мелководного района Карского моря
Рис. 2. Гистограмма потерь при распространении звука в волноводе с неоднородным дном
Штриховая линия — распределение Берра
Расчетное распределение c хорошей точностью аппроксимируется распределением Берра.
При этом большая часть потерь лежит в диапазоне от 60 до 70 дБ, однако существует ненулевая
вероятность попасть в аномальную область, где средние потери достигают 120 дБ.
При распространении звука в широкой полосе частот от 150 до 1000 Гц локальные
водоподобные области на трассе приводят к осцилляциям в огибающей спектра регистрируемого
широкополосного сигнала, отвечающего низшим модам. Это является следствием межмодового
взаимодействия и служит индикатором неоднородности в структуре дна. Период осцилляций
первой моды пропорционален расстоянию между источником и локальной неоднородностью, а
оценка периода осцилляций в прямом и обратном направлениях (рис. 3, а) позволяет проводить
локализацию этих областей на стационарных акустических трассах.
а
б
Рис. 3. Проявление взаимодействия мод и горизонтальной рефракции
а — осцилляции модовых амплитуд; б — смещение пеленга на источник
317
Методы прикладной гидроакустики
а
б
Рис. 4. Направленность шума в относительных дБ при двух типах дна
а — вертикальная плоскость; б — горизонтальная плоскость
В ряде случаев надо учитывать изменение направления распространения звука в
горизонтальной плоскости. Наличие сильно неоднородной структуры дна может отклонять звук
от прямолинейного распространения. Данный эффект называется горизонтальной рефракцией.
При изучении горизонтальной рефракции наибольший интерес представляет диапазон частот до
150 Гц, где проявление эффекта максимально. На этих частотах в рассматриваемом волноводе
существует только одна энергонесущая мода. При этом значительная рефракция будет
наблюдаться, если величина изменения скорости звука в дне достаточно велика, а направление
изменения ориентировано поперек акустической трассы. Рефракция влияет на результат оценки
пеленга (рис. 3, б) низкочастотного источника — величина смещение достигает нескольких
градусов при расположении источников в 10 км от горизонтальной антенны. Также
горизонтальная рефракция приводит к увеличению амплитуды низкочастотного импульса на
10 дБ и более (дБ), и дополнительной задержке времени прихода на 0,1 с по сравнению с
аналогичным однородным волноводом.
Сильная неоднородность донной структуры рассматриваемого участка Карского моря
может обуславливать пространственную изменчивость характеристик интенсивности и
направленности шума, генерируемого ветровым волнением. При моделировании шума ветрового
волнения [2] рассматривались приповерхностные источники на частоте 500 Гц, распределённые
в горизонтальной плоскости на глубине 0,7 м. На рис. 4 приведены диаграммы направленности
шума в вертикальной и горизонтальной плоскости, рассчитанные для участка дна с высокой
скоростью звука («твёрдое дно») и низкой («водоподобное дно»). В горизонтальной плоскости
наблюдается слабая анизотропия шума, а в вертикальной плоскости наибольшие отличия видны
для диапазона углов 0 ± 30°.
В заключении отметим, что проявление эффектов, связанных с наличием водоподобных
областей дна, возможно даже при постоянной глубине волновода и отсутствии неоднородностей
в толще и на поверхности воды.
Литература
1. Григорьев В. А., Петников В. Г., Росляков А. Г., Терехина Я. Е. Распространение звука в мелком
море с неоднородным газонасыщенным дном // Акуст. журн. Т. 64, № 3 С. 342−358.
2. Carey W. M., Evans R. B. Ocean ambient noise: measurement and theory // Springer Science & Business
Media. 2011.
Исследование выполнено за счет гранта Российского научного фонда № 22-72-10121,
https://rscf.ru/project/22-72-10121/.
318
Методы прикладной гидроакустики
ДИСТАНЦИОННОЕ ЗОНДИРОВАНИЕ СОСРЕДОТОЧЕННЫХ
НЕОДНОРОДНОСТЕЙ В МЕЛКОВОДНЫХ ВОЛНОВОДАХ С ИСПОЛЬЗОВАНИЕМ
ШИРОКОПОЛОСНЫХ СИГНАЛОВ И МОДОВОЙ ФИЛЬТРАЦИИ
В. А. Григорьев, канд. физ.-мат. наук, А. А. Луньков, канд. физ.-мат. наук,
М. А. Шерменева, канд. физ.-мат. наук
Институт общей физики им. А.М. Прохорова Российской академии наук, Москва, Россия
REMOTE SENSING OF LOCAL INHOMOGENEITIES IN SHALLOW WATER
WAVEGUIDES USING BROADBAND SIGNALS AND MODE FILTERING
V. A. Grigorev, Ph.D., A. A. Lunkov, Ph.D., M. A. Shermeneva, Ph.D.
Prokhorov General Physics Institute of the Russian Academy of Sciences, Moscow, Russia
Аналитически и в рамках численного моделирования рассматривается задача зондирования
сосредоточенной неоднородности на акустической трассе между широкополосным низкочастотным
излучателем и вертикальной цепочкой гидрофонов в мелком море. Показано, что наличие неоднородности
приводит к характерным осцилляциям в спектре сигналов отдельных волноводных мод. Причём период
осцилляций однозначно связан с расстоянием до неоднородности, что может быть использовано для её
локализации.
Remote sensing of local inhomogeneity is considered analytically and numerically for an acoustic track between
a broadband low-frequency transducer and a vertical array of hydrophones in shallow water. It is shown that the
presence of inhomogeneity leads to oscillations in the normal mode frequency spectrum. The period of oscillations
is unambiguously related to the distance to the inhomogeneity, which can be used to localize it.
Задача диагностики подводной среды на предмет различного рода неоднородностей не
теряет своей актуальности. В настоящей работе рассматривается акустическое зондирование
сосредоточенных неоднородностей, размер которых много меньше длины акустической трассы,
Δ𝑟𝑟 ≪ 𝑅𝑅 . К таким неоднородностям можно отнести локальные поднятия дна, солитоны
внутренних волн, ледовые кили, рассеиватели искусственного происхождения и т.д. Для
акустического зондирования предлагается использовать подход, основанный на анализе
частотной зависимости модовых амплитуд [1] вместо более традиционного подхода,
работающего по разности времён прихода сигналов [2]. Основное внимание уделено
теоретическому исследованию возможности определения положения сосредоточенной
неоднородности на трассе между одиночным ненаправленным излучателем и вертикальной
приёмной антенной (рис. 1).
Рис. 1. Схема мелководного волновода с неоднородностью
319
Методы прикладной гидроакустики
Звуковое давление на частоте 𝜔𝜔 и глубине 𝑧𝑧 в мелководном волноводе с естественной
неоднородностью удобно записать в виде суммы взаимодействующих нормальных волн (мод):
𝑝𝑝(𝜔𝜔, 𝑧𝑧) = ∑𝑀𝑀
𝑚𝑚=1 𝐴𝐴𝑚𝑚 (𝜔𝜔)𝜓𝜓𝑚𝑚 (𝜔𝜔, 𝑧𝑧)
Здесь 𝑀𝑀 — общее число мод; 𝜓𝜓𝑚𝑚 — вертикальные профили мод; 𝐴𝐴𝑚𝑚 = 𝐶𝐶𝑚𝑚
(1)
𝑅𝑅
𝑒𝑒 𝑖𝑖 ∫0 𝑞𝑞𝑚𝑚 (𝑟𝑟)𝑑𝑑𝑑𝑑
�𝑞𝑞𝑚𝑚 𝑅𝑅
— модовые
амплитуды, где 𝑅𝑅 — расстояние от источника звука до приёмной системы; 𝑞𝑞𝑚𝑚 — постоянные
распространения мод; 𝐶𝐶𝑚𝑚 — модовые коэффициенты возбуждения. При наличии на
акустической трассе сосредоточенной неоднородности, коэффициент возбуждения первой моды,
может быть приближённо записан как
𝐶𝐶1 (𝜔𝜔) ≈ 𝑒𝑒 −𝛼𝛼1 (𝜔𝜔)𝑅𝑅 𝜓𝜓1 (𝜔𝜔; 𝑧𝑧𝑠𝑠 ) +
−𝛼𝛼𝑚𝑚 (𝜔𝜔)𝑟𝑟𝑠𝑠
+𝑒𝑒 −𝛼𝛼1 (𝜔𝜔)(𝑅𝑅−𝑟𝑟𝑠𝑠 ) ∑𝑀𝑀
𝜓𝜓𝑚𝑚 (𝜔𝜔; 𝑧𝑧𝑠𝑠 )�𝑒𝑒 𝑖𝑖�𝑞𝑞𝑚𝑚 (𝜔𝜔)−𝑞𝑞1 (𝜔𝜔)�𝑟𝑟𝑠𝑠
𝑚𝑚=2�𝐵𝐵1𝑚𝑚 (𝜔𝜔)𝑒𝑒
(2)
Здесь 𝛼𝛼𝑚𝑚 — коэффициенты затухания мод; 𝑧𝑧𝑠𝑠 — глубина источника звука; 𝑟𝑟𝑠𝑠 — расстояние от
источника до неоднородности; 𝐵𝐵1𝑚𝑚 — коэффициент межмодового взаимодействия.
Если в волноводе присутствует искусственная неоднородность, звуковое давление обычно
представляют в виде суммы невозмущённой и рассеянной компоненты
𝑝𝑝(𝜔𝜔, 𝑧𝑧) = 𝑝𝑝𝑖𝑖𝑖𝑖𝑖𝑖 (𝜔𝜔, 𝑧𝑧) + 𝑝𝑝𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 (𝜔𝜔, 𝑧𝑧).
В рамках такого подхода и приближения однократного рассеяния коэффициент
возбуждения первой моды есть
𝐶𝐶1 (𝜔𝜔) ≈ 𝑒𝑒 −𝛼𝛼1 (𝜔𝜔)𝑅𝑅 𝜓𝜓1 (𝜔𝜔; 𝑧𝑧𝑠𝑠 ) +
+𝑒𝑒 −𝛼𝛼1 (𝜔𝜔)(𝑅𝑅−𝑟𝑟𝑠𝑠 ) ∑𝑀𝑀
𝑚𝑚=1 �
𝑇𝑇1𝑚𝑚 (𝜔𝜔)
�𝑞𝑞𝑚𝑚 𝑟𝑟𝑠𝑠 (1−𝑟𝑟𝑠𝑠 ⁄𝑅𝑅)
𝑒𝑒 −𝛼𝛼𝑚𝑚(𝜔𝜔)𝑟𝑟𝑠𝑠 𝜓𝜓𝑚𝑚 (𝜔𝜔; 𝑧𝑧𝑠𝑠 )� 𝑒𝑒 𝑖𝑖�𝑞𝑞𝑚𝑚(𝜔𝜔)−𝑞𝑞1 (𝜔𝜔)�𝑟𝑟𝑠𝑠 ,
(3)
где 𝑇𝑇1𝑚𝑚 — матрица рассеяния из моды 𝑚𝑚 в моду 1.
Как видно, выражения (2) и (3) для 𝐶𝐶1 (𝜔𝜔) имеют схожий вид. В большинстве случаев 𝛼𝛼𝑚𝑚 ,
𝜓𝜓𝑚𝑚 , 𝐵𝐵�1𝑚𝑚 , 𝑇𝑇1𝑚𝑚 являются плавными функциями частоты 𝜔𝜔 , а множители 𝑒𝑒 𝑖𝑖�𝑞𝑞𝑚𝑚(𝜔𝜔)−𝑞𝑞1 (𝜔𝜔)�𝑟𝑟𝑠𝑠
осциллируют, вследствие чего |𝐶𝐶1 (𝜔𝜔)| и |𝐴𝐴1 (𝜔𝜔)| также являются осциллирующими функциями.
Период осцилляций в частотной области однозначно зависит от расстояния до неоднородности
𝑟𝑟𝑠𝑠 . В случае, когда в волноводе распространяется только две низшие моды (𝑀𝑀 = 2), оценка
−1⁄𝛽𝛽
−1⁄𝛽𝛽12
расстояния может быть выполнена по формуле 𝑟𝑟𝑠𝑠 = 2𝜋𝜋��𝛾𝛾12 �𝜔𝜔𝑙𝑙+1 12 − 𝜔𝜔𝑙𝑙
��, где 𝜔𝜔𝑙𝑙 и 𝜔𝜔𝑙𝑙+1
— частоты соседних максимумов в |𝐴𝐴1 (𝜔𝜔)|, 𝛽𝛽12 - интерференционный инвариант для пары мод
1-2, 𝛾𝛾12 — коэффициент, зависящий только от номеров мод [3]. В многомодовом волноводе
(𝑀𝑀 > 2) период осцилляций и расстояние 𝑟𝑟𝑠𝑠 могут быть определены путём кепстрального анализа
|𝐴𝐴1 (𝜔𝜔)|.
Численное моделирование проводилось для мелководного волновода глубиной 𝐻𝐻 = 40 м и
частотного диапазона 𝑓𝑓 = 50−500 Гц при общей длине акустической трассы 𝑅𝑅 = 5 км. Точечный
источник звука располагался на глубине 𝑧𝑧𝑠𝑠 = 15 м. Для естественных неоднородностей расчёты
велись методом широкоугольного параболического уравнения (код RAM) с последующим
𝐻𝐻
выделением первой моды на виртуальной вертикальной антенне 𝐴𝐴̃1 (𝜔𝜔) = ∫0 𝑝𝑝(𝜔𝜔, 𝑧𝑧)𝜓𝜓1 (𝜔𝜔, 𝑧𝑧)𝑑𝑑𝑑𝑑.
Для искусственного рассеивателя — в рамках модовой теории (код KRAKEN).
Примеры зависимостей модуля амплитуды первой моды |𝐴𝐴1 | от частоты 𝑓𝑓 = 𝜔𝜔/2𝜋𝜋 и
расстояния 𝑟𝑟𝑠𝑠 для трёх типов неоднородностей: локального поднятия дна высотой Δℎ = 10 м
(Δ𝑟𝑟 = 100 м), внутренней волны в виде солитона амплитуды Δ𝜁𝜁 = 10 м (Δ𝑟𝑟 = 100 м) и жёсткой
сферы диаметром 𝐷𝐷 = 10 м — показаны на рис. 2, где можно видеть, что период осцилляций |𝐴𝐴1 |
вдоль частотной оси растёт с расстоянием до неоднородности 𝑟𝑟𝑠𝑠 .
320
Методы прикладной гидроакустики
Рис. 2. Зависимости спектра сигнала первой моды |𝐴𝐴1 (𝜔𝜔)|
от расстояния 𝑟𝑟𝑠𝑠 для трёх типов неоднородностей
а — локальное поднятие дна; б — внутренний солитон; в — сферический рассеиватель
а
б
Рис. 3. Алгоритм оценки расстояния до неоднородности
в
а — спектр моды |𝐴𝐴1 (𝑓𝑓)|; б — спектр моды �𝐴𝐴1 �𝑓𝑓 −1⁄𝛽𝛽12 ��; в — кепстр моды |𝑆𝑆1 (𝑟𝑟𝑠𝑠 )|
Оценка расстояния до неоднородности с помощью кепстрального анализа
проиллюстрирована на рис. 3 для локального поднятия дна на расстоянии 𝑟𝑟𝑠𝑠 = 2500 м. Из рис. 3, а
видно, что до частоты 200 Гц реализуется двухмодовый режим, а на более высоких частотах —
многомодовый. На первом шаге алгоритма делается переход от зависимости |𝐴𝐴1 (𝜔𝜔)| к
зависимости �𝐴𝐴1 �𝜔𝜔 −1⁄𝛽𝛽12 �� , на втором — преобразование Фурье (взятие кепстра) от
�𝐴𝐴1 �𝜔𝜔 −1⁄𝛽𝛽12 ��, в результате которого с точностью до множителя 𝛾𝛾12 получается зависимость от
𝑟𝑟𝑠𝑠 (сачтоты). Здесь оценка расстояние ведётся по паре мод 1 и 2. Для удобства на рис. 3 частота
приведена в герцах (𝑓𝑓). На рис. 3, в можно заметить, что максимум кепстра находится примерно
при 𝑟𝑟𝑠𝑠 = 2300 м, что в пределах 10 %-ной погрешности от номинального значения расстояния.
Литература
1. Луньков А. А, Шерменева М. А. Взаимодействие мод на сосредоточенной однородности в
мелководном акустическом волноводе в широкой полосе частот // Акуст. журн. 2022. Т. 68, № 5.
С. 510−519.
2. Нечаев А. Г., Хилько А. И. Дифференциальная акустическая диагностика случайных
неоднородностей океана // Акуст. журн. 1988. Т. 34, № 2. С. 285−289.
3. Грачев Г.А. К теории инвариантов акустического поля в слоистых волноводах // Акуст. журн.
1993. Т. 39, № 1. С. 67−71.
Результаты исследования могут быть востребованы при разработке методов активной локации
неоднородностей подводной среды. Работа выполнена за счет гранта Российского научного фонда
№ 22-72-10121, https://rscf.ru/project/22-72-10121/.
321
Методы прикладной гидроакустики
О ТОЧНОСТИ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ АКУСТИЧЕСКИМ МЕТОДОМ
В КАРСКОМ МОРЕ ПРИ ЛЕДОВОМ ПОКРОВЕ
А. А. Луньков1, канд. физ.-мат. наук, Ю. В. Назаренко1,2, В. Г. Петников1, д-р физ.-мат. наук,
С. В. Писарев3, канд. физ.-мат. наук, Д. Д. Сидоров1
1
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
2
Московский государственный университет имени М.В. Ломоносова, Москва, Россия
3
Институт океанологии им. П. П. Ширшова РАН, Москва, Россия
ON THE ACCURACY OF DISTANCE DETERMINATION BY ACOUSTIC METHOD
IN THE KARA SEA WITH ICE COVER
A. A. Lunkov1, Ph.D., Yu. V. Nazarenko1,2, V. G. Petnikov1, Dr.Sc., S. V. Pisarev3, Ph.D., D. D. Sidorov1
1
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
2
Lomonosov Moscow State University, Moscow, Russia
3
Shirshov Institute of Oceanology, RAS, Moscow, Russia
В рамках численного моделирования получены оценки точности определения расстояния между
источником и приемником звука в Карском море в присутствии ледового покрова, что актуально для
подводной навигации. Предполагается, что основным источником возможных ошибок при определении
расстояния является отсутствие точных данных о вертикальном профиле скорости звука по трассе
распространения акустических сигналов. Возможные вариации такого профиля получены при
статистической обработке гидрологических данных, взятых из базы World Ocean Database. Анализ
проведён для сигналов в полосе частот 1−5 кГц.
As part of numerical modeling, estimates of the accuracy of determining the distance between the sound source
and receiver were obtained for the Kara Sea with of ice cover. These results are important for underwater
navigation. It is assumed that the main source of possible errors in the distance determination is the lack of
accurate data on the vertical profile of the sound speed along the propagation path of acoustic signals. Possible
variations of this profile were obtained by statistical processing of hydrological data taken from the World Ocean
Database. The analysis was carried out for the signals in the frequency band 1−5 kHz.
В настоящее время для решения широкого класса научно-исследовательских и
народнохозяйственных задач начинают широко использоваться автономные необитаемые
подводные аппараты (АНПА). Особенно актуальны эти задачи для арктического шельфа России,
где сложность их решения обусловлена наличием ледового покрова. Здесь применение АНПА
обещает быть наиболее эффективным, однако эта эффективность во многом определяется
возможностями подводной акустической навигации, являющейся безальтернативным методом
определения координат подводного аппарата в акватории, частично или полностью покрытой
льдом (см. [1] и цитируемые там работы). Очевидно, что точность подводной навигации зависит
от вариаций вертикального профиля скорости звука по трассе распространения акустических
сигналов. В частности, от этих вариаций зависят погрешности измерений расстояний между
подводным источником и приемником звука акустическими методами. При этом указанные
вариации, как и сам профиль скорости звука, зависят от района исследований и от времени года.
Ниже
анализируются
результаты
обработки
гидрологических
данных,
зарегистрированных в ноябре месяце в одном из районов Карского моря, протяженностью
≈140 км [2]. Приводятся результаты оценок точности определения дистанции между источником
и приемником звука с учетом измеренных гидрологических характеристик. Район измерений
находился на расстоянии ≈300 км от берега. Было выполнено 28 океанологических станций, по
данным которых были определены вертикальные профили температуры и солености до глубины
100 м. Характерной особенностью результатов измерений явилось присутствие
приповерхностного перемешанного слоя морской воды с очень низкой солёностью ≈21 епс и
плотностью, обусловленного стоком пресной воды из рек Обь и Енисей. Можно констатировать,
что совокупный плюм этих рек простирается на расстояние ~300 км, заметно влияя на соленость
и, соответственно, скорость звука в верхнем водном слое (см. рис. 1) Как видно на рисунке, для
этого слоя характерна не только низкая скорость звука с , но и её значительные флуктуации
относительно среднего значения. В предположении о нормальном распределении величины с ,
322
Методы прикладной гидроакустики
вероятность значения скорости звука, выходящего за пределы области, ограниченной на рис. 1
штриховыми линиями, составляет менее 5 %.
При моделировании распространения акустических сигналов для вычисления
передаточной функции волновода использовалось модовое описание звукового поля [3].
Импульсная характеристика волновода определяется как обратное преобразование Фурье от
передаточной функции. Акустический сигнал на входе приемника представляет собой свертку
излучаемого сигнала с этой характеристикой.
При моделировании выбирались следующие характеристики волновода, покрытого льдом:
глубина H = 100 м, толщина льда l = 1 м, расстояние между источником и приемником звука
r=2 и 5 км.
Расчеты проводились при следующих комбинациях параметров: глубины источника и
приемника выбирались равными zs = zr = 8 м и zs = zr = 70 м, для каждой комбинации выбирались
все три профиля скорости звука (сплошная линия и штриховые), показанные на рис. 1. Для
определенности обозначим эти профили как с− ( z ), c( z ), c+ ( z ) ( c− ( z ) < c( z ) < c+ ( z ) ) .
Параметры морского дна полагались равными: скорость звука cb = 1600 м/с, коэффициент
затухания звука β =0,33 дБ/λ (λ — длина акустической волны), плотность ρb =1850 кг/м3.
Передаточная функция рассчитывалась с помощью программы KRAKEN [4]. Моделировалось
распространение сигнала с линейной частотной модуляцией в полосе частот 1–5 кГц.
Длительность сигнала выбиралась равной T = 1 c.
Результаты моделирования показаны на рис. 2 для каждого из профилей скорости звука
для расстояния между источником и приемником r = 5 км и для глубины zs = zr = 70 м. Здесь
приведены лишь несколько импульсов Ai (τ ) (i — номер импульса), приходящих первыми и
обладающих наибольшей амплитудой. При моделировании время распространения
определялось по времени прихода первого импульса. В нашем случае это был импульс,
обладающий наибольшей амплитудой.
Рис. 1. Средний вертикальный
профиль скорости звука
(сплошная линия)
Рис. 2. Сигнал A(τ) на выходе корреляционного приемника при
разных профилях скорости звука с+ ( z ), c( z ), c− ( z ) на трассе
распространения акустических сигналов
Штриховой линией ограничена
область с доверительным
интервалом 95 %
323
Методы прикладной гидроакустики
Результаты оценки времен распространения tc (средний профиль скорости звука c(z)) для
этой и других комбинаций параметров задачи приведены в таблице 1. ∆t− и ∆t+ равно разности
времен распространения при профилях скорости звука с(z) и с-(z), а также с(z) и с+(z),
соответственно. ∆r = r ∆t tc — возможная ошибка в определении дистанции при неизвестной
априори зависимости скорости от глубины. Здесь следует подчеркнуть, что полученные
значения ошибки являются лишь грубой оценкой возможных значений погрешностей при
определении расстояния. Последнее связано с ограниченностью наших знаний о случайном
пространственно-временном поле скорости звука в исследуемой акватории.
Таблица 1
Расстояние r,
м
Глубина,
zs=zr, м
∆t− = tc − tc − ,
2000
8
2000
tc, с
∆t+ = tc − tc + ,
-0,01375
1,40360
+0,009
70
-0,00145
1,39555
+0,0016
5000
8
-0,0227
3,50860
+0,02245
5000
70
-0,00195
3,47180
+0,0025
с
с
Ошибка в определении
расстояния ∆r , м
−19, 6
+12,8
−2,1
+2,3
−32,3
+32, 0
−2,8
+3, 6
Как видно из табл. 1, при характеристиках морской воды, соответствующих
гидрологической зиме, точность определения расстояния между подводными источником и
приемником звука зависит от их глубины. Она возрастает почти на порядок при их расположении
в придонной части волновода.
Литература
1. Bhatt E. C., Viquez O., Schmidt H. Under-ice acoustic navigation using real-time model-aided range
estimation // J. Acoust. Soc. Am. 2022. Vol. 151, № 4. P. 2656−2671
2. World Ocean Database 2018
3. Бреховских Л. М., Лысанов Ю. П. Теоретические основы акустики океана. М.: Наука, 2007
4. Porter M. The KRAKEN normal mode program / La Spezia, Italy. SACLANT Undersea Research
Centre, 1991 (https://oalib-acoustics.org/website_resources/AcousticsToolbox/manual/kraken.html)
Исследование выполнено за счет гранта Российского научного фонда
https://rscf.ru/project/22-72-10121/.
324
№ 22-72-10121,
Проблемы прикладной гидрофизики
ОБОБЩЕННОЕ ПРЕДСТАВЛЕНИЕ ВОЛНОВОДНЫХ ИНВАРИАНТОВ
В ГЛУБОКОМ МОРЕ
С. П. Аксенов, канд. физ.-мат. наук, Г. Н. Кузнецов, канд. физ.-мат. наук
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
GENERALIZED REPRESENTATION OF WAVEGUIDE INVARIANTS IN DEEP SEA
S. P. Aksenov, Ph.D., G. N. Kuznetsov, Ph.D.
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
Вводится новое определение инварианта гидроакустического поля, основанное на устойчивой оценке –
инвариантности ортогональных проекций градиентов фазы звукового давления на плоскости «расстояние–
частота». Инвариант назван фазо-энергетическим (ФЭИ). Такое определение обобщает понятие
инварианта для разных зон мелкого и глубокого моря, в том числе – для ближней и дальней зон освещенности
и зоны тени глубокого моря. Во всех зонах ФЭИ практически равен «+1», кроме зон дислокаций, где
наблюдаются непредсказуемые скачки фаз. Показано, что инвариант Чупрова в глубоком море имеет
сингулярные значения во всех зонах, кроме зоны тени, где он совпадает по величине с ФЭИ.
A new definition of the hydroacoustic field invariant is introduced, based on a stable estimate - the invariance of
orthogonal projections of sound pressure phase gradients on the distance-frequency plane. This definition
generalizes the concept of invariant for different zones of the shallow and deep sea, including for the near and far
zones of illumination and the shadow zone of the deep sea. In the zone of existence of the Chuprov interference
invariant, its values practically coincide with the values of the new invariant.
В гидроакустике мелкого моря нашла широкое применение концепция волноводного
инварианта — инварианта Чупрова (ИЧ) [1], определяемого по веерной структуре частотнопространственного распределения интенсивности на плоскости «горизонтальное расстояние–
частота» (r ~ f). Эта концепция позволила решить ряд практически важных задач в пассивной и
активной локации. Для мелкого моря способ оценки ИЧ достаточно прост: необходимо для
заданных условий рассчитать или измерить на плоскости r ~ f наклон полос (гребней)
интерференционных картин амплитуды звукового давления (ЗД). Но для глубокого моря,
особенно для ближней и дальней зон акустической освещенности (БЗАО и ДЗАО),
использование определения в виде (1) невозможно из-за сингулярности решения и
неопределенности значений ИЧ
(1)
=
β (r / f )(∂f / ∂r ) .
Поскольку ИЧ определяется на плоскости поля интенсивности r ~ f, далее будем его
называть энергетическим инвариантом Чупрова (ЭИЧ) β. Свойства нового инварианта зависят
от градиентов фазы в частотной и пространственной области, а также от распределения
интенсивности, поэтому далее будем его называть фазо-энергетическим (ФЭИ). Определение
эффективного ФЭИ βef запишем в виде [2]
/ ∂f )) (cgef / cϕef ) .
=
βef (r / f )((∂ϕ / ∂r ) / (∂ϕ=
(2)
Здесь cgef и cϕef — эффективные групповая и фазовая скорости (ЭГС и ЭФС), которые являются
средневзвешенными оценками групповых и фазовых скоростей нормальных волн,
распространяющихся в волноводе. ЭГС и ЭФС можно рассчитать или измерить с
использованием градиентов фазы в частотной и пространственной областях
cgef = 2πr ( ∂ϕ ∂f ) , cφef = 2πf ( ∂ϕ ∂r ) ,
(3)
где ϕ = ϕ( f , r , zs , z ) — фаза комплексного звукового давления P, представленного полной
суммой мод, распространяющихся в волноводе с постоянной глубиной h
325
Проблемы прикладной гидрофизики
iϕ ( f , r , z s , z )
=
P( f , r , zs , z ) P=
( f , r , zs , z ) e
M
∑
m=0
um ( zs )um ( z ) e
i[(2 πf / cϕm ) r − ( π /4)]−δm r
h
( f /cϕm )r
∫ u ( z′)dz′
2
m
.
(4)
0
В выражении (4) zs и z — глубины источника и приемника, um, cϕm и δm — собственная функция,
фазовая скорость и мнимая часть волнового числа m-й моды.
На рис. 1 для глубокого моря в летних условиях (см. рис. 2, а) представлены распределения
амплитуды ЗД и βef на плоскости r ~ f. Структура интерферограммы βef практически полностью
повторяет структуру интерферограммы амплитуды ЗД: и углы наклона полос, и интервалы
между ними одинаковые, в том числе в БЗАО и ДЗАО.
Одинаковые или близкие значения βef располагаются вдоль гребней амплитуды ЗД в зонах
ИМА, где градиенты фазы — гладкие функции — в отличие от зон интерференционных
минимумов. Отметим, что узкие темные зоны соответствуют минимальным значениям P(r) и
неопределенным значениям βef. Светлые — зоны ИМА, в которых βef стремится к единице.
Можно показать, что в зонах ИМА определение (2) является обобщением (1) для произвольных
градиентов фазы в частотно-пространственной области: Но у определения (2) есть
преимущество: оно универсальное, так как позволяет вычислять ФЭИ через проекции градиента
фазы и в мелком море, и во всех зонах глубокого моря. Определение (1) в БЗАО и ДЗАО
глубокого моря приводит к неопределенности или сингулярности значений ЭИЧ, так как линии
гребней параллельны оси частот. Использование (2) дает и в этих зонах устойчивое значение βef
≈ 1. Это объясняется доминированием в этих зонах водных мод, для которых ЭГС и ЭФС близки
к скорости звука в воде.
На рис. 2−4 рассматриваются сечения интерферограмм ЗД, рассчитанные на частоте
350 Гц вдоль оси «расстояний». Там же приведены кривые ЭГС, ЭФС и кривые лучевой
аппроксимации для βef, ЭГС и ЭФС, построенные по формулам
*
*
*
*
(r ) c0 cos θ(r ) , c=
β*ef (r ) = (cgef
(r )) / (cφef
(r )) = cos 2 θ(r ) , cgef=
c0 / cos θ(r ) . (5)
φef ( r )
Здесь c0 — средняя скорость звука в воде. Если источник и приемник не очень далеки от
поверхности, то для cos θ(r ) справедливо приближенное выражение [2]
cos θ(r ) ≈ (1 + [(2h − zs − z ) 2 r 2 ])
−0.5
(
≈ 1 + ( 2h r )
) , z + z < (2h /10) .
2 −0.5
s
Рис. 1. Глубокое море, август
а — распределение амплитуды ЗД; б — распределение ФЭИ βef на плоскости
r ~ f; zs = 5 м, z = 101 м; участок r = 46–49 км — ДЗАО
326
(6)
Проблемы прикладной гидрофизики
Рис. 2. Глубокое море, август
а — профиль скорости звука; б — амплитуда ЗД (кривая 1); 2 — βef×3000; 3 — βef = 1; 4 — cgef; 5 — cϕef; 6 — c0 ;
7 — βef × 3000 ; 8 — cgef ; 9 — cφef ; zs =5 м, z = 101 м, f = 350 Гц
*
*
*
Рис. 3. Глубокое море, февраль
а — распределение амплитуды ЗД; б — распределение βef на плоскости
r ~ f; zs = 125 м, z = 101 м. ДЗАО располагается на участке r = 44–55 км
Рис. 4. Глубокое море, февраль
а — профиль скорости звука; б — амплитуда ЗД (кривая 1); 2 — βef × 3000 ; 3 — βef = 1; 4 — cgef ;
5 — cφef ; 6 — c0 ; zs = 125 м, z = 101 м, f = 350 Гц
На рис. 2 видно, что для зоны тени значения βef, ЭГС и ЭФС в зонах ИМА попадают на
кривые, соответствующие в летних условиях их лучевой аппроксимации.
На интерферограммах амплитуды ЗД (рис. 1, а) на расстояниях 46,5 и 48,3 км наблюдаются
два протяженных максимума, соответствующие ДЗАО. Двум этим расстояниям, как и в БЗАО,
соответствуют независимые от частоты звука две вертикальные линии гребней амплитуд (рис. 1),
вдоль которых βef ≈ 1, но значения ЭИЧ β в этих зонах в соответствии с выражением (1) стремятся
к бесконечности. В зоне тени на расстояниях свыше 15 км на всей плоскости cgef ≈ cφef и βef≈1.
Значения βef на рис. 2 умножены на 3000, чтобы кривые можно было показать на одном рисунке.
В зимних условиях в глубоком море (рис. 3, 4), как и в летних, на участках r меньше 3 км
и в зоне 45−47 км также располагаются БЗАО и ДЗАО, где β стремится к бесконечности. Из-за
наличия зимнего приповерхностного канала происходит захват этим каналом водных мод с
фазовыми скоростями, близкими к скорости звука в водном слое c0 . Поэтому зимой
крупномасштабные максимумы в ДЗАО маскируются, и в зонах ИМА на расстояниях свыше 5 км
на всей плоскости cgef ≈ cφef и βef ≈ 1.
327
Проблемы прикладной гидрофизики
Для мелкого моря при летних и зимних условиях, но при умеренной неоднородности поля
в вертикальной плоскости, ЭИЧ, β, и ФЭИ, βef, в эонах ИМА близки к «+1» и их зависимости от
расстояния и частоты практически совпадают.
Из полученных результатов следует, что структура частотно-пространственных
интерферограмм звукового давления (рис. 1 и 3), а также зависимости от расстояния и частоты
cϕef, cgef полностью определяются инвариантными свойствами ФЭИ в летних и в зимних условиях.
Во всех зонах и всех расстояниях, кроме участка зоны тени, примыкающего к БЗАО, βef ≈ 1, то
есть ФЭИ действительно является инвариантом.
Можно также сделать вывод, что в глубоком океане с использованием ФЭИ должна
увеличиваться помехоустойчивость обнаружения и оценки пеленга, а также определения в
пассивном режиме расстояния до источника точно так же, как это производится в мелком море с
использованием ЭИЧ [2, 3].
Литература
1. Чупров С. Д. Акустика океана: современное состояние. М.: Наука, 1982. С. 71–91.
2. Aksenov S. P., Kuznetsov G. N. Determination of Interference Invariants in a Deep-Water Waveguide by
Amplitude and Phase Methods // Phys. Wave Phen. 2021. Vol. 29. Р. 81–87.
3. Кузнецов Г. Н., Кузькин В. М., Пересёлков С. А. Спектрограмма и локализация источника звука в
мелком море // Акуст. журн. 2017. Т. 63, № 4. С. 406–418.
328
Методы прикладной гидроакустики
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ГИДРОАКУСТИЧЕСКИХ ШУМОВ
В ДИАПАЗОНЕ 2−400 кГц В МЕЛКОВОДНОЙ ПРИБРЕЖНОЙ АКВАТОРИИ
С. В. Горовой
Дальневосточный федеральный университет, Владивосток, Россия
Тихоокеанский океанологический институт им. В. И. Ильичева ДВО РАН, Владивосток, Россия
SOME RESULTS OF THE EXPERIMENTAL STUDY HYDROACOUSTIC NOISE
IN THE RANGE OF 2−400 кHz IN SHALLOW COASTAL WATERS
S. V. Gorovoy
Far Eastern Federal University, Vladivostok, Russia
V. I. Il’ichev Pacific Oceanological Institute, FEB RAS, Vladivostok, Russia
Описаны результаты исследования спектральных характеристик гидроакустических шумов в
прибрежной акватории в заливе Петра Великого Японского моря, вблизи порта Владивосток в диапазоне
частот 2 – 400 кГц. Приведены спектрограммы и усредненные спектральные уровни звукового давления
гидроакустического шума: когда температура воды составляла+4℃ и поверхность моря была свободна
от льда (ноябрь), а также когда температура воды составляла+1℃, а поверхность моря была покрыта
сплошным слоем льда толщиной 0,5 м (январь).
The results of the study of the spectral characteristics of hydroacoustic noise in the coastal water area in the Peter
the Great Bay of the Sea of Japan, near the port of Vladivostok in the frequency range of 2–400 kHz are described.
Spectrograms and averaged spectral levels of sound pressure of hydroacoustic noise are given: when the water
temperature was +4°C and the sea surface was ice-free (November), as well as when the water temperature was
+1°C, and the water surface was covered with a continuous layer of ice 0,5 m thick (January).
Введение. Результаты исследования низкочастотных гидроакустических шумов описаны
в [1–4], методики измерения характеристик гидроакустических шумов, используемые
зарубежными исследователями, описаны в [5, 6]. Гидроакустические шумы на частотах свыше
20 кГц, которые зависят в том числе от биологических факторов, рассматриваются в
сравнительно малом количестве работ [7–9]. В [9] описаны результаты исследования
характеристик гидроакустических шумов в диапазоне частот 1−400 кГц, в которых
присутствуют техногенные составляющие и помехи от щелкающих морских обитателей. Шумы
были зарегистрированы при температуре воды у поверхности 18℃, в мелководном прибрежном
районе залива Петра Великого Японского моря, вблизи акватории порта Владивосток. В данном
докладе представлены результаты исследования спектральных характеристик звукового
давления гидроакустического шума в этом же районе, в диапазоне частот 2−400 кГц, но в
холодное время года, когда помех от щелкающих морских обитателей нет, в том числе, когда
водная поверхность покрыта слоем льда.
Описание аппаратуры и района исследований. Экспериментальные исследования
выполнялись в дневное время, в сухую солнечную безветренную погоду в акватории и с
использованием оборудования, описанных в [9]: в ноябре 2023 г. при состоянии моря 2 балла,
когда температура воздуха и воды составляла +4℃, а также январе 2024 г., когда поверхность
воды была покрыта слоем льда толщиной 0,5 м, а температура воздуха и воды составляла +1°С.
Глубина места в районе исследований составляет 4 м, расстояние до кромки прибоя порядка
100 м, дно ил-песок с плавным увеличением глубины при удалении от берега. Использовался
установленный практически в той же точке акватории, что и в [9] широкополосный гидрофон,
представляющий собой совокупность соосно расположенных биморфных дисковых приемников
из пьезоэлементов ∅15×0,3 мм и тот же самый усилительный тракт. Использовался
16-разрядный АЦП, частота дискретизации составляла 1 МГц.
Результаты исследований. На рис. 1 и рис. 2 показаны спектрограммы типичных
фрагментов сигналов длительностью 0,5 с на выходе гидрофонного усилителя, когда
поверхность воды свободна и покрыта льдом. На обеих спектрограммах разрешающая
способность по частоте составляет 1 кГц. Видны импульсные сигналы в диапазоне частот
40−80 кГц длительностью 0,5 мс, следующие через интервалы времени порядка 50 мс,
создаваемые исследовательским гидролокатором. Всплеск на частотах до 10 кГц на интервале
329
Методы прикладной гидроакустики
0,91−0,96 с на рис. 2 обусловлен треском льда. На рис. 3 показаны усредненные по 4 фрагментам
длительностью 75 мс спектральные уровни в полосе 1 Гц: 1 — поверхность воды не покрыта
льдом, 2 — поверхность воды покрыта льдом толщиной 0,5 м. На рис. 4, для сравнения, показаны
усредненные по 8 фрагментам спектральные уровни в полосе 100 Гц, зарегистрированные в
теплое время года и описанные в [9]. Масштабы по шкалам уровней на рис. 1−4 условные, но
ориентировочно можно считать, что спектральный уровень на частоте 2 кГц на кривой 1, рис. 2,
примерно соответствует уровню шумов моря на данной частоте при состоянии моря 5 баллов на
кривых Венца [1].
Из сравнения рис. 1−4 видно, что, когда поверхность воды была свободна от льда,
наблюдались широкие максимумы спектра в областях 7−11 кГц, 20–50 кГц и вблизи 350 кГц. Эти
же максимумы в той или иной мере заметны и на рис. 4. Когда поверхность воды покрыта льдом,
в области 8–40 кГц наблюдается почти ровный, без наклона, участок спектра, но появляется
доминирующий максимум в области 150–180 кГц, после которого идет спад порядка
10 дБ/октаву и максимум в области 300–400 кГц. Предположительно, это вызвано изменением
количества и размеров растворенных в воде воздушных пузырьков и сезонными изменениями
биологической активности в море при понижении температуры.
Рис. 1. Спектрограмма фрагмента сигнала, когда поверхность воды свободна от льда
Рис. 2. Спектрограмма фрагмента сигнала, когда поверхность воды покрыта льдом толщиной 0,5 м
Рис. 3. Усредненные спектральные уровни в полосе 1 Гц
1 — поверхность воды не покрыта льдом; 2 — поверхность воды покрыта льдом толщиной 0,5 м
330
Методы прикладной гидроакустики
Рис. 4. Усредненные спектральные уровни в полосе 100 Гц,
зарегистрированные в теплое время года [9]
Выводы
1. Наблюдавшийся в теплое время года в районе работ спектральный максимум в области
20−50 кГц в холодное время года, понижается. Если поверхность моря покрыта льдом его
практически не видно, но появляются спектральные максимумы на частотах свыше 100 кГц, что
вызвано, предположительно, изменением количества и размеров растворенных в воде
воздушных пузырьков и сезонными изменениями биологической активности в море при
понижении температуры.
2. Приведенные в работе результаты характерны для района, в котором выполнялись
исследования, для других мелководных районов они могут быть использованы как
ориентировочные.
Литература
1. Wenz G. M. JASA. 1962. Vol.34, № 12. P. 1936–1956.
2. Uric R. J. Ambient Noise in the Sea // Naval Sea System Command. Washington, D.C., 1984.
3. Carey W. M., Evans R. B. Ocean Ambient Noise. Measurement and Theory // Springer New York. 2011.
4. Committee on Potential Impacts of Ambient Noise in the Ocean on Marine Mammals // Ocean Noise
and Marine Mammals. The National Academic Press. Washington, D.C., 2003.
5. AQUO Project Consortium // European UNR Standard Measurement Method. 2014.
6. National Physical Laboratory // Good Practice Guide for Underwater Noise Measurement. 2014.
7. Рутенко А. Н., Фершалов М. Ю., Ущиповский В. Г. Акустические шумы, формируемые на
мелководном шельфе судами с электродвигателями // Акуст. журнал. 2020. Т. 66, № 5. С. 527.
8. Акуличев В. А., Буланов А. В. Акустические исследования мелкомасштабных неоднородностей в
морской среде. Владивосток: ТОИ ДВО РАН, 2017.
9. Горовой С. В. Статистические характеристики высокочастотных гидроакустических шумов на
мелководье // Тр. XXXV сессии Российского акустического общества. М.: ГЕОС, 2023. С. 408.
331
Методы прикладной гидроакустики
МОДОВАЯ ГОЛОГРАФИЯ В НЕРЕГУЛЯРНОМ МЕЛКОВОДНОМ ВОЛНОВОДЕ
В. М. Кузькин1, д-р физ.-мат. наук, С. А. Переселков2, д-р физ.-мат. наук, С. А. Ткаченко2, канд. техн. наук,
П. В. Рыбянец2
1
Институт общей физики им. А. М. Прохорова РАН, Москва, Россия
2
Воронежский государственный университет, Воронеж, Россия
MODE HOLOGRAPHY IN IRREGULAR SHALLOW WAVEGUIDE
V. M. Kuz’kin1, Dr.Sc., S. A. Pereselkov2, Dr.Sc., S. A. Tkachenko2, Ph.D., P. V. Rybyanets2
1
Prokhorov Institute of General Physics of the RAS, Moscow, Russia
2
Voronezh State University, Voronezh, Russia
В работе представлены результаты численного моделирования голографического метода выделения мод
в нерегулярном гидроакустическом волноводе на океаническом шельфе. Предполагается, что
нерегулярный характер среды распространения обусловлен присутствием внутренних волн и
нерегулярной нижней границей, в частности неровностями рельефа дна. Рассмотрены различные случаи
присутствия внутренних волн и нерегулярностей дна, обуславливающих как горизонтальную рефракцию,
так и взаимодействие мод. Показано, что нерегулярный характер среды распространения не приводит к
потере идентичности модовых характеристик сигнала: моды выделяются и их параметры
восстанавливаются.
The paper presents the results of numerical simulation of the holographic method of mode isolation in an irregular
hydroacoustic waveguide on the oceanic shelf. It is assumed that the irregular nature of the propagation medium
is due to the presence of internal waves and an irregular lower boundary, in particular the irregularities of the
bottom relief. Various cases of the presence of internal waves and bottom irregularities causing both horizontal
refraction and mode interaction are considered. It is shown that the irregular nature of the propagation medium
does not lead to a loss of identity of the mode characteristics of the signal: modes are isolated and their parameters
are restored.
Селекция отдельных мод звукового поля для оценки их параметров является важной
задачей акустики океана. Методам селекции мод с использованием одиночных приемников
уделяется все большее внимание в настоящее время. К наиболее часто применяемым методам
относятся преобразование Вигнера [1] и оператор Time-Warping [2]. Они позволяют
восстанавливать групповые скорости мод в приближении идеального волновода. Следует
отметить, что восстановление остальных параметров мод, таких как амплитуда, постоянная
распространения и модальный коэффициент затухания остается открытым вопросом. Для
решения этой задачи предложен голографический метод выделения мод и оценок их параметров
[3]. Однако вопросы разрешения мод в нерегулярных акваториях не рассматривались. Этой
проблеме посвящена данная работа.
Пусть точечный источник движется с радиальной скоростью w (проекция скорости в
направлении на приемник). Вещественную составляющую звукового давления на
горизонтальном расстоянии r0 + wt от одиночного приемника запишем в виде суммы мод:
=
p ( t , f ) S ( f ) ∑Am ( t , f ) exp − γ m ( f )( r0 + wt ) cos hm ( f )( r0 + wt ) .
(1)
m
Здесь
S ( f ) = S ( f ) cos φ s ( f )
—
спектр
излучаемого
сигнала;
f1 ≤ f ≤ f 2 ,
=
f1, 2 f 0 ( ∆f / 2 ) , ∆f и f 0 — ширина и средняя частота спектра; r0 — начальное расстояние
в момент времени
t0 = 0 ;
Am ( t , f ) , hm ( f )
и
γ m ( f ) — амплитуда, постоянная
распространения и модальный коэффициент затухания m-й моды. Применим к (1) двумерное
преобразование Фурье
332
Методы прикладной гидроакустики
F (τ ,ν )
=
∆t f 2
f τ ) dtdf ∑F (τ ,ν ) ,
∫ ∫ p ( t , f ) exp i 2π (ν t −=
m
(2)
m
0 f1
где ∆t — время наблюдения; τ и ν — время и частота голограммы; Fm (τ ,ν ) — парциальная
голограмма m-й моды. Восстановленные параметры мод будем обозначать точкой над символом
параметра: A m ( t , f ) , hm ( f ) , γ m ( f ) и um ( f ) — восстановленные амплитуда, постоянная
распространения, коэффициент затухания и групповая скорость m-й моды. Восстановленные
амплитуды мод и модальные коэффициенты затухания равны:
=
A m ( r , f 0 ) Fm (τ m ,ν m , r , f 0 ) / S ( f 0 ) ∆f ∆t ,
− 1/ ( r2 − r1 ) ln r2 / r1 g m ( r1 , r2 ) , r2 > r1.
γ m ( f 0 ) =
(3)
(4)
Здесь Fm (τ m ,ν m , r , f 0 ) — величина пика фокального пятна m-й моды на расстоянии r,
g m ( r1 , r2 , f 0 ) = Fm ( τ m ,ν m , r2 , f 0 ) / Fm ( τ m ,ν m , r1 , f 0 ) .
В мелководной акватории внутренние волны, представляющие собой цуги интенсивных
короткопериодных колебаний водной поверхности постоянной плотности (цуги солитонов) [4],
вызывают вариации профиля скорости звука невозмущенного волновода глубиной H = 70 м [3].
В работе рассмотрены случаи горизонтальной рефракции и взаимодействия мод поля шумового
источника, когда углы между трассой и волновым фронтом цуга солитонов равны нулю и
девяносто градусов.
В начальный момент времени t0 = 0 расстояние между источником и приемником
r0 = 10 км. Источник, расположенный на глубине zs = 20 м, с радиальной скоростью w = 1 м/с
движется в сторону одиночного приемника, размещенного на глубине zq = 45 м. Частотный
диапазон =
f 100 − 120 Гц, f 0 = 110 Гц, поле формируется тремя модами.
Горизонтальная
рефракция.
Относительные
вариации
амплитуд
мод
bm ( ti , f 0 ) = Am ( ti , f 0 ) / Am ( f 0 ) , обусловленные горизонтальной рефракцией, приведены на
рис. 1.
Согласно результатам обработки по двадцати моментам времени:
а) относительные вариации групповых скоростей мод по отношению к невозмущенным
значениям 0,9958 ≤ u g1 ( f 0 ) / u g1 ( f 0 ) ≤ 1, 0014 , 0,9909 ≤ u g 2 ( f 0 ) / u g 2 ( f 0 ) ≤ 0,9947 ,
0,9747 ≤ u g 3 ( f 0 ) / u g 3 ( f 0 ) ≤ 0,9838 ;
б) относительные вариации постоянных распространения мод по отношению
к невозмущенным значениям 0, 7278 ≤ h1 ( f 0 ) / h1 ( f 0 ) ≤ 0,9678 ,
0, 6889 ≤ h2 ( f 0 ) / h2 ( f 0 ) ≤ 0,9350 , 0, 6553 ≤ h3 ( f 0 ) / h3 ( f 0 ) ≤ 0,9072 .
Согласно рис. 1 относительные вариации амплитуд мод коррелированы и сопоставимы
между собой. Их значительные изменения, maxA m / minA m ~ 30 , объясняются условиями
формирования поля в зависимости от расположения трассы относительно цуга солитонов. Когда
трасса находится на гребне (вершине) цуга солитонов, звуковое поле дефокусируется: модовые
лучи всех мод одновременно «соскакивают» с трассы. В результате регистрируемые амплитуды
мод значительно меньше амплитуд мод невозмущенного волновода. При расположении трассы
между гребнями солитонов звуковое поле фокусируется: модовые лучи всех мод одновременно
«возвращаются» на трассу. Это приводит к усилению амплитуд мод по сравнению с
амплитудами мод невозмущенного волновода.
333
Методы прикладной гидроакустики
а
б
в
Рис. 1. Временные зависимости относительных вариаций амплитуд мод; горизонтальная рефракция
а — первая мода; б — вторая мода; в — третья мода
а
б
в
Рис. 2. Временные зависимости относительных вариаций амплитуд мод; взаимодействие мод
а — первая мода; б — вторая мода; в — третья мода
Взаимодействие
мод.
Относительные
вариации
амплитуд
мод
bm ( ti , f 0 ) = A m ( ti , f 0 ) / Am ( f 0 ) , обусловленные взаимодействием мод, приведены на рис. 2.
Результаты обработки по двадцати моментам времени показали:
а) относительные вариации групповых скоростей мод по отношению к невозмущенным
значениям 0,9977 ≤ u g1 ( f 0 ) / u g1 ( f 0 ) ≤ 1, 0049 , 0,9904 ≤ u g 2 ( f 0 ) / u g 2 ( f 0 ) ≤ 0,9945 ,
0,9750 ≤ u g 3 ( f 0 ) / u g 3 ( f 0 ) ≤ 0,9835 ;
б) относительные вариации постоянных распространения мод по отношению к
невозмущенным значениям 0,8923 ≤ h1 ( f 0 ) / h1 ( f 0 ) ≤ 1, 0705 ,
0, 7382 ≤ h2 ( f 0 ) / h2 ( f 0 ) ≤ 0,9914 , 0, 7229 ≤ h3 ( f 0 ) / h3 ( f 0 ) ≤ 1, 0081 .
Из рис. 2 следует, что интенсивность перекачки энергии между модами из-за
взаимодействия мод уменьшается с увеличением номера моды.
Литература
1. Belov A. I., Kuznetsov G. N. Estimating the acoustic characteristics of surface layers of the sea bottom
using four-component vector-scalar receivers // Acoust. Phys. 2016. Vol. 62, № 2. P. 194−201. https://doi.org/
10.1134/S1063771016020044.
2. Bonnel J., Chapman N. R. Geoacoustic inversion in a dispersive waveguide using warping operators // J.
Acoust. Soc. Am. 2011. Vol. 130, № 2. P. EL101−El107. https://doi.org/10.1121/1.3611395.
3. Kuz’kin V. M., Matvienko Yu. V., Pereselkov S. A., Prosovetskii D. Yu., Kaznacheeva E.S. Mode selection
in oceanic waveguides // Phys. Wave Phenom. 2022. Vol. 30, № 2. P. 111−118. https://doi.org/10.3103/S1541
308X22020030.
4. Zhou J., Zhang X. Z., Rogers P. H. Resonant interaction of sound wave with internal solitons in the coastal
zone // J. Acoust. Soc. Am. 1991. Vol. 90, № 4. P. 2042−2054. https://doi.org/10.1121/1.401632.
5. Katsnel’son B. G., Pereselkov S. A. Spare-frequency dependence of the horizontal structure a sound field in
the presence of intense internal waves // Acoust. Phys. 2004. Vol. 50, № 2. P. 169−176. https://doi.org
/10.1134/1.1675872.
Исследование выполнено при поддержке гранта Российского научного фонда № 23-61-10024,
https://rscf.ru/project/23-61-10024/.
334
Методы прикладной гидроакустики
АНАЛИЗ РЕШЕНИЯ ЗАДАЧ ОБ АКУСТИЧЕСКИ ПРОЗРАЧНОМ ТЕЛЕ
О. И. Косарев, д-р техн. наук, А. К. Пузакина
Институт машиноведения им. А. А. Благонравова РАН, Москва, Россия
ANALYSIS OF SOLVING PROBLEMS ABOUT AN ACOUSTICALLY
TRANSPARENT BODY
O. I. Kosarev, Dr.Sc., A. K. Puzakina
Blagonravov Mechanical Engineering Research Institute of RAS, Moscow, Russia
В статье проведен критический анализ двух наиболее известных решений задачи об акустически
прозрачном теле. Показаны ошибки этих решений.
The article provides a critical analysis of two of the most well-known solutions to the problem of an acoustically
transparent body. The errors of these solutions are shown.
Задача создания акустически прозрачного тела решается давно, но до сих пор остается
актуальной [1−7].
Решение Малюжинца. В работе [1] рассмотрена задача гашения звукового поля,
рассеянного произвольным телом при облучении его внешним источником звука. Суть
постановки и решения задачи заключается в следующем. На тело из внешнего источника падает
и рассеивается звуковое поле. Задано полное звуковое поле на поверхности, охватывающей тело
в ближней зоне, в виде
pΣ ( x ) = p0 ( x ) + p s ( x ) ,
(1)
где p0(x) — падающее поле в отсутствии тела; ps(x) — рассеянное поле; x — координата
пространства. Цель решения — надо погасить рассеянное поле ps(x). Рассеянное поле гасится
компенсирующим полем p*(x) создаваемым излучателями из условия ps(x)+p*(x)=0.
pΣ ( x ) = p0 ( x ) + p s ( x ) + p ∗ ( x ) .
(2)
Результат, получаемый, по мнению автора, заключается в том, что поскольку после гашения
суммарное поле остается pΣ(x)=p0(x), а p0(x) это падающее поле в отсутствии тела, то тело
становится акустически прозрачным.
Для реализации гашения поверхность тела S охватывается измерительной поверхностью
S1, на которой размещены измерители полного давления и его градиента (колебательной
скорости). На другой поверхности S2, охватывающей поверхность S1 размещены излучатели
звука, создающие звуковое давление и скорости, гасящие рассеянное поле. Рассеянное поле
ps(S1) на поверхности S1 считается известным, найденным методом факторизации (выделения) по
результатам замеров полного поля pΣ(S1) и его нормальной производной на поверхности S1.
Утверждение, полученное на основании формулы (2) заключающееся в том, что в случае
гашения рассеянного поля ps(S1)=0 тело становится акустически прозрачным ошибочное, потому
что отсутствие связи формулы (2) с дальним полем не позволяет судить по ней о том, будет ли
тело акустически прозрачным или нет в дальнем поле.
Единственной формулой, по которой можно судить о прозрачности тела является формула
звукового давления в дальнем поле [5]
p Σ ( N ) = p 0 ( N ) + p( N ) ,
(3)
где p0(N) — падающее поле в точке наблюдения N в отсутствии тела.
Дифракционное поле в дальней зоне p(N) в точке наблюдения N определяется формулой
Кирхгофа
335
Методы прикладной гидроакустики
1
p( N ) =
4π
∫∫
− ikR
∂G ( N , A) ∂p
e
,
G ( N, A) ds , G( N , A ) =
−
( p 0 + p s )
∂n
∂n
R
(4)
где p=p0+ps — полное поле на поверхности тела; p0 — падающее поле, рассеиваемое телом;
ps — рассеянное телом поле, определяемое граничными условиями на теле [5−7].
Внешние падающие поля в отсутствии тела p0(x) и p0(N) в формулах (2) и (3) можно убрать
из рассмотрения, как не имеющие отношение к задаче дифракции, поскольку очевидно, что если
рассеивающее тело отсутствует, то и дифракция отсутствует. Cудить о прозрачности тела будем
по формуле (4). В формулу (4) входят полное поле p и его градиент — нормальная производная
∂p/∂n на поверхности тела, G(N,A) — функция Грина. Градиент определяется граничными
условиями ∂p/∂n=ρω2w, где w — колебательное перемещение поверхности тела. Если погасить
рассеянное поле ps=0, то тогда в (4) остаются p0 и ∂p0/∂n. и в результате этого дальнее поле p(N)
не будет равно нулю, т.е. тело не будет акустически прозрачным. Для получения акустически
прозрачного тела исходить надо из гашения дальнего поля p(N), включающее полное поле p и
его градиент.
Решение Бобровницкого. В работе [4] сказано, что задача создания акустически
прозрачного тела была поставлена и решена в 60-е годы прошлого века в [1] и независимо
другими несколькими авторами. Однако в [4] было предложено новое решение этой задачи. Суть
нового решения заключается в следующем. Задаваемое полное поле в ближней зоне (1) и цель
решения принимаются такими же, как в [1]. Суммарное поле с учетом компенсирующего поля
будет
(5)
pΣ ( x ) = p0 ( x ) + p s ( x ) + p a ( x ) ,
где p0(x) — падающее поле в отсутствии тела; ps(x) — рассеянное поле; pa(x) — компенсирующее
поле; x — координата произвольной точки среды вне тела.
Но способ гашения рассеянного поля другой. Новизна его заключается в гашении
рассеянного поля ps(x) путем создания на поверхности тела вибраций, возбуждаемых
распределенными силами fa. Преимущество этого способа автором объясняется тем, что при его
реализации не нужно проводить факторизацию. Оперируя параметрами ближнего поля,
разъясняется, что силовое воздействие fa создает звуковое давление pa(x), которое компенсирует
рассеянное поле, т.е. ps(х)+pa(х)=0, в результате чего тело становится акустически прозрачным.
Формулы давлений ни ps(x) ни pa(x) в условии ps(x)+pa(x)=0, из которого должна определяться
сила fa, не представлены. Измеряемые параметры в ближнем поле тоже не указаны. Зато указано,
что доступными для измерения считаются давление полного звукового поля p(s) и градиент
полного поля v(s) (колебательная скорость) на поверхности тела. Фактически это означает, что
рассматривается полное поле на поверхности тела p, а не суммарное поле в ближней зоне (5).
Формула гасящей силы fa определена из решения уравнения колебаний тела, возбуждаемых
полным полем p и силами fa на поверхности тела
Zw = p0 + ps + f a ,
(6)
где Z — импеданс тела; p0, ps и fa — давления, падающего и рассеянного полей и силы,
приложенные к поверхности тела; w — вибрационное перемещение полного поля на
поверхности тела. Решение (6) представлено в виде
w = w0 + w0
(Z 0−Z ) +
(Z − Z s )
fa
Z − Zs
(7)
где Z0 — импеданс падающего поля; w0=p0/Z0 — перемещение падающего поля на поверхности
тела. Здесь в отличие от [4] используется колебательное перемещение, а не колебательная
336
Методы прикладной гидроакустики
скорость, что не имеет принципиального значения для гармонических функций. Формула
гасящей силы fa получена в виде
(8)
f a = w( Z − Z 0 ) .
В [4] подчеркнуто, что из-за наличия в формуле (8) полного перемещения w, факторизация
не нужна. Однако полученная формула гасящей силы fa (8) ошибочная. Формула гасящей силы
должна быть получена из выражения рассеянного поля. Но из одного уравнение (6) нельзя
получить выражение рассеянного поля. Правильное выражение гасящей силы fa получено в [6]
из условия гашения рассеянного поля ps =0. Рассеянное поле ps, определено из совместного
решения системы двух уравнений: 1) уравнения колебаний тела (6) и 2) уравнения граничных
условий
Рассеянное поле ps имеет вид [6]
∂( p0 + p s )
= ρω 2 w .
∂r
r =a
p s ==
Zs
[w (Z − Z ) + f a ].
(Z − Z s ) 0 0
(9)
Из формулы (9) однозначно следует, что для гашения рассеянного поля ps =0 гасящие силы fa
должны быть
(10)
f a = w0 ( Z − Z 0 ) .
Если гасящие силы fa определяются формулой (8), то рассеянное поле не гасится, ps ≠0.
Отметим, как важное обстоятельство, что для возможности пользования формулой (10)
необходимо определить перемещение падающего поля w0, т.е. необходимо проведение
факторизации полного поля. Оказывается, для гашения рассеянного поля факторизация, вопреки
мнению автора [4], все же нужна. В качестве дополнительного обоснования отметим, что
ошибочность решения (8) наглядно проявляется при пошаговом рассмотрении процесса
гашения, описанном в [6].
Таким образом, в результате проведенного анализа установлено, что гашение рассеянного
поля в [1] не делает тело акустически прозрачным в дальнем поле. При гашении рассеянного
поля гасящими силами в [4] формула гасящей силы fa (8) определена неверно. Из-за ошибочного
определения гасящей силы fa рассеянное поле вообще оказывается не погашенным, так что
предложенное новое решение тоже является ошибочным. Возможные теоретически
обоснованные варианты получения акустически прозрачного тела представлены в [7].
Литература
1. Малюжинец Г. Д. Нестационарные задачи дифракции для волнового уравнения с финитной
правой частью // Тр. акустического института. 1971. Вып. 15. С.124−139.
2. Федорюк М. В. О работах Г. Д. Малюжинца по теории волновых потенциалов // Тр.
акустического института.1971. Вып. 15. С. 124−139.
3. Завадская М. П., Попов А. В., Эгельский Б. Л. Об аппроксимации волновых потенциалов в
задачах активного гашения звуковых полей по методу Малюжинца // Акустический журнал. 1975. Т. 21.
№ 5. С. 732−738.
4. Бобровницкий Ю. И. Новое решение задачи об акустически прозрачном теле // Акустический
журнал. 2004. Т. 50. № 6. С. 751−755.
5. Шендеров Е. Л. Волновые задачи гидроакустики. Л.: Судостроение, 1972. 352 с.
6. Косарев О. И. Активное гашение звука, рассеянного упругой цилиндрической оболочкой, путем
приложения к ней вынуждающих сил // Проблемы машиностроения и надежности машин. 2008. № 5.
С. 29−33.
7. Косарев О. И. Задача полного гашения дифракционного звукового поля цилиндрической
оболочки // Проблемы машиностроения и надежности машин. 2024. № 1. С. 1−9.
337
Методы прикладной гидроакустики
ПРИМЕНЕНИЕ ЧИСЛЕННЫХ МОДЕЛЕЙ ДЛЯ ОЦЕНКИ ШУМОИЗЛУЧЕНИЯ
ПРИ ВОЗБУЖДЕНИИ КОРПУСНОЙ КОНСТРУКЦИИ
Ю. Н. Попов1,2, канд. техн. наук
1
Санкт-Петербургский государственный морской технический университет, Россия
2
ФГУП «Крыловский государственный научный центр», Санкт-Петербург, Россия
APPLICATION OF NUMERICAL MODELS TO ESTIMATE NOISE EMISSION DURING
EXCITATION OF A HOUSING STRUCTURE
Yn. N. Popov1,2, Ph.D.
1
Saint Petersburg State Marine Technical University, St. Petersburg, Russia
2
Krylov State Research Centre, St. Petersburg, Russia
Рассматриваются вопросы акустического моделирования толстостенной конструкции с ребрами
жесткости, представляющей собой элемент корпуса. Известно, что расчет акустического поля
достаточно сложная задача, в процессе решения которой учитывается огромное число факторов.
В статье выполнен анализ частотных характеристик при возбуждении исследуемой конструкции
гармонической силой. Выполняется сравнение с результатами эксперимента, полученными на макете в
стендовых условиях. По результатам анализа в статье сделаны выводы о возможностях и ограничениях
цифровых методов при моделировании акустических полей от конструкции.
The issues of acoustic modeling of a thick-walled structure with stiffeners, which is a housing element, are
considered. It is known that calculating the acoustic field is a rather complex task, in the process of solving which
a huge number of factors are taken into account. The article analyzes the frequency characteristics when the
structure under study is excited by a harmonic force. A comparison is made with the experimental results obtained
on a prototype under bench conditions. Based on the results of the analysis, the article draws conclusions about
the capabilities and limitations of digital methods in modeling acoustic fields from a structure.
В качестве объекта исследований был выбран экспериментальный макет толстостенной
оболочки длиной 1390 мм, внутренним радиусом 690 мм (рис. 1). С обоих торцов оболочки были
приварены массивные фланцы толщиной 15 мм. По длине оболочки были приварены т-образные
ребра жесткости. В эксперименте оболочка закреплялась на подвесе. В районе седьмого ребра
устанавливался источник гармонической силы. Экспериментально исследовалась частотная
характеристика вибровозбудимости конструкции при воздействии внешней силы. Подробное
описание экспериментального макета и проводимого эксперимента приведено в [1]. Полученные
экспериментальные данные использовались для верификации численной модели,
предназначенной для расчета уровней излучаемого оболочкой акустического поля.
Рис. 1. Толстостенная оболочка с ребрами жесткости
338
Методы прикладной гидроакустики
Рис. 2. Частотная характеристика вибровозбудимости
В процессе построения численной модели конструкции оболочки с ребрами жесткости для
акустического проектирования был учтен ранее полученных опыт решения подобных задач
[2−4], касающихся возбуждения и переизлучения упругих конструкций, находящихся в контакте
с акустически «тяжелой» средой. На рис. 2 показаны сравнительные результаты между
частотной характеристикой вибровозбуждения, полученной в результате эксперимента
(сплошная линия), и частотными характеристиками вибровозбуждения, полученными на
численной модели.
Как видно из рис. 2 частотная зависимость вибровозбудимости, полученная в
эксперименте, не имеет абсолютного совпадения с расчетными значениями, полученными на
численной модели. Здесь следует отметить, что экспериментальный макет оболочки имел
множество отдельных конструкционных отличий от «идеализированной» геометрии, которая
использовалась в численной модели. В частности, ребра не имели сплошной сварной шов, их
взаимное расположение варьировалось в определенных пределах, сама оболочка имела сварной
шов по всей длине. Очевидным следствием данных отличий явилось то, что глубины
антирезонансов на расчетной модели и в эксперименте не должны были совпасть. Однако
использование численных моделей, даже с учетом определенных отступлений от геометрии
реальной конструкции, позволяют с достаточной степенью точности рассчитывать
возбуждаемые резонансные формы колебаний. Как видно из рис. 2 при расчете с помощью
численной модели первые четыре формы колебаний по частоте и амплитуде получены с
достаточной степенью точности. На рис. 3 показаны первые три формы колебаний
толстостенной оболочки, определяющие максимум ее излучения в низкочастотной области
(фланцы на торцах не показаны).
Рис. 3. Формы колебаний оболочки в спектре вибровозбудимости
339
Методы прикладной гидроакустики
Рис. 4. Амплитуда акустического поля в ближней зоне
На рис. 4 показана амплитуда акустической волны в ближней зоне в окружающем
оболочку пространстве при ее возбуждении гармонической силой. Видно, что направленность
излучения на выбранных частотах зависит от форм колебаний оболочки. Точка приложения
силы, в соответствие с рис. 1, направлена вниз.
На рис. 5 показаны рассчитанные на численной модели диаграммы направленности
излучения исследуемой оболочки в дальней зоне (оболочка ориентирована вертикально для
удобства анализа). Для расчета дальней зоны было выбрано расстояние 1000 м. Видна связь
между формами колебаний оболочки на выбранных частотах и диаграммами излучения в
дальней зоне.
Рис. 5. Диаграммы направленности излучения оболочки
340
Методы прикладной гидроакустики
Проведенные исследования показывают, что применение численных моделей при
проектировании сложных корпусных объектов позволяет, не только качественно, но и
количественно описывать формируемое ими акустическое поле. Это справедливо даже с учетом
некоторых неизбежных отступлений численной модели от геометрии реальной конструкции.
Литература
1. Кирпичников В. Ю. Вибровозбудимость конструкции и пути ее уменьшения. СПб.: Балтийский
государственный технический университет «Военмех», 2011, 206 с.
2. Popov Yn. Modeling and estimation of acoustic pulse energy dissipation in a waveguide with elastic
walls. электронная библиотека IEEE Xplore Digital Library. 2020.
3. Попов Ю. Н., Легуша Ф. Ф. Поглощение акустической волны в волноводе с импедансными
граничными условиями // Тр. Крыловского государственного научного центра. СПб. 2021. № 2(396).
С. 113−121.
4. Попов Ю. Н., Легуша Ф. Ф., Румянцев К. А. О численном моделировании акустического сигнала
в волноводе конечной длины // Тр. Всерос. конф. «Прикладные технологии гидроакустики и гидрофизики»
ГА-2020. СПб. 2020.
341
Методы прикладной гидроакустики
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ РАССЕЯННОГО ГИДРОАКУСТИЧЕСКОГО
ПОЛЯ ОТ КОРПУСНОЙ КОНСТРУКЦИИ С РЕБЕРНЫМ НАБОРОМ
Ю. Н. Попов1,2, канд. техн. наук, Н. М. Лисенков2, канд. техн. наук
1
Санкт-Петербургский государственный морской технический университет, Россия
2
ФГУП «Крыловский государственный научный центр», Санкт-Петербург, Россия
NUMERICAL SIMULATION OF SCATTERING ACOUSTIC FIELD FROM A HULL
STRUCTURE WITH A RIB SET
Yn. N. Popov1,2, Ph.D., N. M. Lisenkov, Ph.D.
1
Saint Petersburg State Marine Technical University, St. Petersburg, Russia
2
Krylov State Research Centre, St. Petersburg, Russia
Рассматриваются вопросы акустического моделирования рассеянного акустического поля в воде от
толстостенной конструкции с ребрами жесткости. Расчет акустического поля при рассеянии звуковой
волны на реальной корпусной конструкции представляет собой сложную задачу, требующую введения
определенных приближений при моделировании и учета различных факторов. В статье анализируется
широко используемое приближение, при котором поверхность оболочки считается абсолютно жесткой.
В статье выполнен сравнительный анализ рассеянного поля на модели абсолютно жесткой оболочки и
модели, учитывающей реальные жесткостные характеристики конструкции. Сделаны выводы об
ограничениях применения численных моделей с неполным набором физико-механических характеристик
исследуемой корпусной конструкции.
The issues of acoustic modeling of the scattered acoustic field in water from a thick-walled structure with stiffeners
are considered. Calculation of the acoustic field when a sound wave is scattered on a real body structure is a
complex task that requires the introduction of certain approximations in modeling and taking into account various
factors. The article analyzes a widely used approximation in which the surface of the shell is assumed to be
absolutely rigid. The article performs a comparative analysis of the scattered field on a model of an absolutely
rigid shell and a model that takes into account the real rigidity characteristics of the structure. Conclusions are
drawn about the limitations of using numerical models with an incomplete set of physical and mechanical
characteristics of the hull structure under study.
Оценка уровней рассеянного на реальной конструкции акустического поля представляет
собой очень сложную задачу, несмотря на значительное развитие численных методов. Во многом
это обусловлено тем, что для реальной конструкции, как правило, неизвестен импеданс на
поверхности, требуются определенные приближения при моделировании геометрии и при
задании физико-механических характеристик материалов, а также учет ряда других факторов.
В данной работе в качестве объекта исследований был выбран экспериментальный макет
толстостенной оболочки с ребрами жесткости (рис. 1, а). Подробное описание
экспериментального макета и проводимого эксперимента по определению частотной
характеристики вибровозбудимости конструкции приведены в [1]. Полученные
экспериментальные данные использовались для верификации численной модели (рис. 1, б),
предназначенной для расчета уровней излучаемого оболочкой акустического поля. Подробное
описание численной модели, степень ее детализации и результаты верификации приведены в [2].
При построении численной модели по вопросам оценки гидролокационного поля от
подводных объектов авторы ориентировались на доступный материал, изложенный в
монографии [3], обобщающий возникающие проблемы и способы их решения. Также
использовался ранее полученный опыт моделирования акустических полей в акустически
«тяжелой» среде [4−6]. На рис. 2 показаны расчеты рассеянного акустического поля в ближней
зоне на упругой толстостенной оболочке с ребрами жесткости при падении плоской волны в
траверсном направлении. Низшая форма колебаний рассматриваемой конструкции находилась
на частоте 178 Гц. Видно, что учет упругих характеристик оболочки определяет формирование
рассеянного поля. Аналогичные результаты имеют место при экспериментальных
исследованиях.
342
Методы прикладной гидроакустики
а
б
Рис. 1. Конструкция оболочки с ребрами жесткости
а — экспериментальный макет оболочки; б — численная модель оболочки
Рис. 2. Рассеянное гидроакустическое поле в ближней зоне
Основной количественной характеристикой рассеянного поля в гидроакустике является
величина силы цели:
σ
TS = 10lg s
,
4π r =1м
(1)
где σ s — сечение обратного рассеяния (эффективная поверхность рассеяния) на расстоянии 1 м
от цели.
В ближней зоне рассеянное гидроакустическое поле ps еще не является сформированным.
С практической точки зрения выполнять вычисления силы цели удобнее с использованием
сечения обратного рассеяния, рассчитанного для дальней зоны:
2
I
p
=
σ s lim
=
4π r s lim 4π r 2 s .
r →∞
r
→∞
Ii
pi
2
Отсюда выражение для силы цели, используемое в численной модели, имеет вид:
343
(2)
Методы прикладной гидроакустики
r ps (r )
,
TS = 20lg
r0 pi
(3)
где pi — амплитуда падающей плоской волны; r0 = 1 , м — нормировочное расстояние 1 м;
r = 1000 , м — расстояние, выбранное для дальней зоны; ps ( r ) — амплитуда рассеянного поля
на расстоянии r от объекта, рассчитанная по всем углам рассеяния.
На рис. 3, а, б показаны колебания упругой оболочки при падении волны и рассеянное
акустическое поле в дальней зоне (частота 100 Гц).
На рис. 4, а и рис. 4, б показаны колебания упругой оболочки при падении волны и
рассеянное акустическое поле в дальней зоне, рассчитанные на численной модели на частоте
300 Гц.
Рис. 3. Рассеянное гидроакустическое поле в дальней зоне на частоте 100 Гц
а — колебания оболочки; б — рассеянное поле в дальней зоне
Рис. 4. Рассеянное гидроакустическое поле в дальней зоне на частоте 300 Гц
а — колебания оболочки; б — рассеянное поле в дальней зоне
344
Методы прикладной гидроакустики
Стрелками на рис. 3 и рис. 4 показано направление падающей волны (траверсное
направление). Из анализа видна связь между возбуждаемыми формами колебаний оболочки и
формированием диаграмм направленности рассеянного поля в дальней зоне.
Проведенные исследования показывают, что применение численных моделей при
проектировании сложных корпусных объектов позволяет, не только качественно, но и
количественно описывать формируемое ими акустическое поле.
Литература
1. Кирпичников В. Ю. Вибровозбудимость конструкции и пути ее уменьшения. СПб.: Балтийский
государственный технический университет «Военмех», 2011, 206 с.
2. Попов Ю. Н. Применение численных моделей для оценки шумоизлучения при возбуждении
корпусной конструкции // Тр. Всерос. конф. «Прикладные технологии гидроакустики и гидрофизики».
СПб. 2024.
3. Ионов А. В., Майоров В. С. Гидролокационные характеристики подводных объектов. СПб.:
ФГУП «Крыловский государственный научный центр», 2011. 325 с.
4. Popov Yn. Modeling and estimation of acoustic pulse energy dissipation in a waveguide with elastic
walls // IEEE Xplore Digital Library. 2020.
5. Попов Ю. Н., Легуша Ф. Ф. Поглощение акустической волны в волноводе с импедансными
граничными условиями. // Тр. Крыловского государственного научного центра. СПб. 2021. № 2(396).
С. 113−121.
6. Попов Ю. Н., Легуша Ф. Ф., Румянцев К. А. О численном моделировании акустического сигнала
в волноводе конечной длины // Тр. Всерос. конф. «Прикладные технологии гидроакустики и
гидрофизики». СПб.: изд-во «Санкт-Петербургский политехнический университет Петра Великого», 2020.
345
Методы прикладной гидроакустики
КОМПЛЕКСИРОВАНИЕ ДАННЫХ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ
И НАВИГАЦИОННЫХ СИСТЕМ ПОДВОДНЫХ ОБЪЕКТОВ
М. А. Рамазанов, д-р техн. наук
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт–Петербург, Россия
COMPLEXING DATA OF INFORMATION-MEASUREMENT SYSTEM
AND NAVIGATION SYSTEMS OF UNDERWATER OBJECTS
М. А. Ramazanov, Dr.Sc.
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Рассмотрены принципы и алгоритмы объединения данных измерений в комплексных системах обработки
информации морских подводных объектов. Представлены рекуррентные алгоритмы комплексирования
разнородных данных. Приведены результаты имитационного моделирования процесса оценивания,
подтверждающие эффективность предложенных алгоритмов обработки информации.
Considered principles and algorithms merging measurement data into complex processing systems information
marine underwater objects. Presented recurrent fusion algorithms integration of heterogeneous data. The result
of simulation of the assessment process are presented confirming the effectiveness of the proposed information.
При разработке информационно-измерительных и навигационных систем (ИИНС)
морских подводных объектов (МПО) возникает необходимость в синтезе алгоритмов
комплексирования различных данных измерений для обеспечения их эффективности. Оценки
координат МПО автономных и гидроакустических ИИНС вырабатываются на основе измерений
разных физических величин с помощью различных устройств [1−3]. Погрешности счисления
координат МПО автономных ИИНС растут неограниченно во времени, при этом на малых
отрезках времени ошибки малы. Гидроакустические ИИНС, напротив, имеют ограниченные во
времени погрешности. Это позволяет считать, что предъявляемым к ИИНС требованиям
наилучшим образом отвечают комплексированные системы, в которых сочетаются
положительные свойства автономных и гидроакустических систем: точность обеспечивается
гидроакустическими средствами, а надёжность и непрерывность выдачи координат —
автономными. Динамика маяка ответчика МОi (рис. 1) может быть описана следующими
уравнениями:
(
)
mk = M yk Z k , Z l = Λ1 (k ) y (k l ) + Λ 2 (k ) yˆ (k k ) + (E − Λ1 (k ) − Λ 2 (k ))m0 ;
Yˆk +1 = Yˆk + µˆ k = Fk +1Yˆk , k = 0,1,2, ... ,
(1)
(2)
где µ k — путь, проходимый МПО между k − м и k + 1 − м запросами МОi . Уравнение
измерения во вспомогательной системе координат (η , ξ ) , повернутой относительно основной
системы координат ( N, E ) на угол α̂ k , в момент времени t k , представимо следующим образом
[
]
Z kη ,ξ = hk u (α k ) HYkE , N + Vk .
346
(3)
Методы прикладной гидроакустики
Рис. 1. Угловые соотношения между
системами координат ( N , E ) и (η , ξ )
Здесь
η ,ξ
Zk
z ηk
= ξ ;
zk
дистанции ρ k =
(y
η
k
z = ρk + v
E
MO
− y1E,k
ρ
k ;
) + (y
2
cos αˆ k
1 0 0 0
; u (αˆ k ) =
H =
0 1 0 0
− sin αˆ k
N
MO
Рис. 2. Геометрические соотношения при измерении
дистанций и угловых координат МПО
vkρ
α
~
z = α k + v k ; Vk = α
vk
ξ
k
− y1N,k
— ошибки измерений
) и углового положения α = arctg y
2
k
[
sin αˆ k
; hk []⋅ = ρ k ; YkE , N = ykE
cos αˆ k
α k
y
y kE
ykN
N
MO
E
MO
]
− yˆ1N,k
;
− yˆ1E,k
T
y kN ; ykE , ykN
и y kE , y kN — координаты и проекции скорости МПО в основной системе координат ( N, E ) ;
α̂ ′k — экстраполированная оценка углового положения объекта.
Следует отметить эквивалентность следующих задач: определение положения МПО по
известным координатам МОi равносильно определению положения МОi по координатам МПО.
Предположив, что в начальный момент времени известны несмещенная оценка Ŷ0 вектора
[
]
состояния МПО и ее ковариационная матрица, при этом M Yˆ0VkT = 0 для любых k ≠ 0 .
Выражение для ковариационной матрицы ошибок оценивания в системе координат ( η, ξ ) имеет
вид:
Pkη ,ξ = U ( α k ) PkN , E ,
где U ( α k ) = I cos α k
I sin α k
. I = 1 0 ;
I cos α k
0 1
− I sin α k
Pη
Pkη ,ξ = k
О
(4)
ρ
О = 0 0 ; Pkη = σ11
0 0
ρ
σ 21
ρ
α
α
; ξ σ11
σ12
;
σ12
Pk = α~
~
ρ
α
σ 22 k
σ 21 σ 22 k
~
~
~
О ; σ ρ , σ α — дисперсии оценок дистанции и углового положения (координат);
11
11
Pkξ
~
~
~
ρ
ρ
α
α
α
σ ρ22 , σ 22
— дисперсии скорости изменения координат; σ12 ( σ 21 ) , σ12 ( σ 21 ) — взаимные
ковариации координат и их производных. Преобразование матриц (4) не нарушает условия
оптимизации, так как Sp ( Pkη ,ξ ) = Sp ( PkN ,E ) и минимизация следа матрицы Pkη ,ξ во
вспомогательной системе координат равносильна минимизации следа PkN , E в основной системе
координат ( N , E ). Поэтому, вычисление весовых матриц K kη и K kξ в системе координат
347
Методы прикладной гидроакустики
(η, ξ) обеспечивает выполнение условий оптимизации решением следующих ковариационных
уравнений:
K kη = Pk′η H T [ H Pk′η H T + Vkρ ]−1 ,
ρ
k
ρ
k
ˆ )R
V = (1 − χ
ρ
k
J = ẑ
T
1,k
ρ( 0 )
k
ρ
k
ˆ R
+χ
ρ( 1 )
k
, V
α
k
K kξ = Pk′ ξ H T [ HPk′ ξ H T + Vkα ] −1 ,
α
k
ˆ )R
= (1 − χ
α( 0 )
k
α
k
ˆ R
+χ
α( 1 )
k
0, J kρ ≤ ∆ ρ
χˆ =
,
ρ
,
1, J k > ∆ ρ
[HP′ H + R ] ẑ , J = ẑ [HP′ H + R ]
η
T
k
ρ (0 ) −1
k
1,k
α
k
T
2 ,k
ξ
α (0 ) −1
k
T
k
(5)
ρ
k
0,
ẑ 2 ,k , χˆ =
1,
J kα ≤ ∆ α
α
k
J kα > ∆ α
,
Rkρ (1) = zˆ1T,k zˆ1,k / ∆ ρ − HPk′ η H T , Rkα (1) = zˆ 2T,k zˆ 2,k / ∆ α − HPk′ξ H T ,
Pk′η = Φ k Pkη−1Φ Tk + Wkη , Pk′ξ = Φ k Pkξ−1Φ Tk + Wkη ,
(6)
Pkη = Pk′ η − K kη HPk′ η , Pkξ = Pk′ ξ − K kξ HPk′ ξ ,
где Wkη , Wkξ — ковариационные матрицы шумов обработки сигналов; ∆ ρ и ∆ α — пороговые
1 τ k
величины по дистанции и угловой координате, зависящие от параметров задачи; Φ k =
;
0 1
l11α
l12ρ
ξ
; L̂k = α
ρ
l 22
k
l 21
l11ρ
τ k = t k − t k −1 ; L̂ = ρ
l 21
η
k
l12α
.
α
l 22
k
Алгоритм устойчивой рекуррентной фильтрации, синтезированный на базе весовых
коэффициентов (5), вырабатываемых во вспомогательной системе координат (η , ξ ) , имеет вид:
YˆkE , N = Yk′ E , N + U T (αˆ k ) K kη ,ξ ;
[
где ŶkEN = ŷ1E,k
ŷ 2E,k
ŷ1N,k
ŷ 2N,k
η ,ξ
k
[
переходная матрица; K
Yˆk′+E1, N = Fk +1YˆkE , N ,
(7)
] — оценки вектора состояния МПО; F = ΦO ΦO —
T
k
k
η
k 1, k
]
ξ
k
= K ~z , K ρˆ k′ ~z 2,k ;
T
[
K kη = k1ρ,k
k 2ρ,k
] ; K = [k
T
ξ
k
k
α
1,k
k 2α,k
];
T
E
N
~z = z η − ρ′ ; ~z = αˆ ′ − αˆ ; α̂ ′ = arctg yˆ1′,k − y MO ; ρ
ˆ ′K = ( ŷ1′,Ek − y MO
) 2 + ( ŷ1′,Nk − y MO
)2 .
1,k
k
k
2 ,k
k
k
k
E
E
N
N
yˆ ′ − y
MO
1,k
Допустим, что на один и тот же момент времени t k известны две апостериорные оценки
ŷ (k k ) и
y (k l ) вектора состояния МПО
yt , полученные по выборкам измерений
Z k = {z s : s = 1,2,..., k } и Z l = {zi : i = 1,2,..., l} , доставляемых независимо работающими
( )и
измерительными устройствами на несовпадающих временных интервалах. Оценки ŷ k k
y (k l ) процесса y t получены в виде условного математического ожидания yˆ (k k ) = M ( yˆ k | Z )
k
( )
и y k l = M ( yk | Z ) . Рассмотрим
l
(n + m + q ) − мерный гауссовский вектор [yk , z k , z l ]T ,
348
Методы прикладной гидроакустики
имеющий априорную плотность распределения вероятностей π ( y0 ) ~ N (m0 , P0 ) и условные
плотности распределения вероятностей
)
(
(
)
π yk Z k ~ N ( yˆ (k k ), P(k k ) ) ; π yk Z l ~ N ( y (k l ), S k ) ,
( )
где P0 , P k k , S k и S k−1 + P −1 (k k ) − P0−1 — положительно-определённые матрицы.
Комплексированную оценку, использующую оценки ŷ (k k ) и y (k l ), можно выразить
следующими формулами [2]:
(
)
mk = M yk Z k , Z l = Λ1 (k ) y (k l ) + Λ 2 (k ) yˆ (k k )+ (E − Λ1 (k ) − Λ 2 (k ))m0 ; Qk = Λ 2 (k )P(k k ),
( )
( )
где E — единичная матрица; Λ 1 (k ) = Qk S k−1 ; Λ 2 (k ) = [ E + P k k S k−1 − P k k P0−1 ]−1.
Для произвольных значений m0 , P0 , удовлетворяющих условиям: P −1 (k k ) − P0−1 ≈ P −1 (k k );
S k−1 − P0−1 ≈ S k−1 ;
S k−1 y (k l ) + P −1 (k k )yˆ (k k ) − P0−1m0 ≈ S k−1 y (k | l ) + P −1 (k k )yˆ (k k ) и коммутативных
матриц P (k k ) и S k , оценки принимает следующий вид:
mk ≈ Λ 1 (k ) y (k l ) + Λ 2 (k ) yˆ (k k );
Qk ≈ Λ 2 (k )P(k k ),
(8)
( )
( )
где Λ 2 (k ) = Θ(k )[ E + P k k S k−1 ] −1 Θ T (k ); Λ 1 (k ) = E − Λ 2 (k ) = Θ(k )[ E + S k P −1 k k ] −1 Θ T (k ) .
Здесь P (k k ) и S k — диагональные матрицы собственных матриц P (k k ) и S k ; Θ ( k ) —
ортогональная матрица собственных векторов. В системе координат, полученной в результате
преобразования y k = Θ(k ) yˆ k , коэффициенты Λ1 (k ) и Λ 2 (k ) определяют относительный
выигрыш от применения параметрического преобразования в сравнении с оценками y (k l ) и
ŷ (k k ) . Поскольку диагональные элементы матриц [ E + P (k k )S k−1 ] −1 и [ E + S k P −1 (k k )]−1 всегда
меньше единицы, то выигрыш в точности решения задач оценивания при использовании
комплексирования точечных оценок будет неизбежным. Для получения комплексированных
оценок в работе использован устойчивый рекуррентный алгоритм (1)…(8). Ошибки
(i )
, где элементы σ (i )
0
местоопределения объекта характеризуются матрицей Pk(i ) = σ ρ
ρ ,k
(i )
(i )
0 ρ ⋅σ α k
и ρ k(i ) ⋅ σ α(i,)k определяют размеры осей эллипса рассеивания ошибок по совокупности измерений
относительно n МО. Дисперсия круговой ошибки место определения МПО для i-го алгоритма
(при n = 1 ) будет равна Sp ( Pk(i ) ) = σ ρ(i,)k + ρ k(i ) ⋅ σ α(i,)k . В графах I, II и III табл. 1 представлены
фактические ошибки оценок фильтрации координат МПО (рис. 2), полученные имитационным
моделированием с применением устойчивых алгоритмов I и II, а также их комплексированные
значения (алгоритм III) по начальным данным:
2
I — алгоритм
=
Rk(0,ρ ) 10 м=
, Rk(1,ρ ) 100=
м 2 , ε 0, 2;=
Rk(0,α ) 1, 4 град 2 ,=
Rk(1,α ) 12,8 град 2 ,
=
ρ0 1151 м,
=
α 0 3, 75 град,
=
ψ 0 45 град, =
σρ,0 110 м 2 =
, σα ,0 15 град 2 ;
II — алгоритм=
Rk(0,ρ ) 5 м 2=
, Rk(1,ρ ) 50 =
м 2 , ε 0, 2; =
Rk(0,α ) 0, 7 град 2 , =
Rk(1,α ) 7, 0 град 2 ,
=
ρ0 1151 м,=
α 0 3, 75 град,=
ψ 0 45 град, =
σρ,0 50 м 2 , =
σα ,0 10 град 2 .
349
Методы прикладной гидроакустики
Таблица 1
k
1
2
3
4
5
6
7
8
9
10
11
12
I
1149,30
1099,70
1063,30
1014,50
989,48
948,67
918,27
895,37
872,05
857,14
850,36
848,37
Оценки фильтрации координат МПО
Дистанция, м
Угловая координата, град
Алгоритм
Алгоритм
II
III
I
II
III
1156,80
1153,19
2,21
2,47
2,34
1104,70
1102,20
5,18
5,84
5,51
1064,00
1063,60
8,09
8,15
8,12
1012,71
1013,63
11,44
11,28
11,36
972,23
981,34
14,52
14,02
14,27
959,14
953,91
18,52
17,98
18,25
906,42
912,35
22,82
22,08
22,45
904,45
899,91
26,59
26,18
26,39
882,49
877,27
31,16
31,77
31,46
866,87
862,01
35,93
36,37
36,15
853,22
851,79
39,82
39,96
39,89
851,06
849,71
45,47
45,37
45,42
Сравнительные оценки эффективности алгоритмов по точности, полученные угломернодальномерными системами с ошибками измерений по дальности и угловой координате:
0
0
1, 4 град 2 (алгоритм I); σ(ρ0) =
0, 7 град 2 (алгоритм II),
σ(ρ0) =
10 м 2 , σ(α ) =
5 м 2 и σ(α ) =
показывают следующее. Комплексирование фильтрованных робастными алгоритмами I и II
оценок, при наличии аномальных измерений, позволяет существенно уменьшить фактические
ошибки место определения МПО и повысить сходимость оценок координат.
100 с.
Литература
1. Фундаментальная и прикладная гидрофизика. Сборник научных трудов. СПб.: Наука, 2008. № 2.
2. Огарков М. А. Методы статистического оценивания параметров случайных процессов. М.:
Энергоатомиздат, 1990. 208 с.
3. Патент RU 2304790, МПК G01S 13/66 (2006/01)/. Устройство оценки для следящей системы /
Рамазанов М. А. (RU); опубл. 20.08. 2007. Бюл. №23.
350
Методы прикладной гидроакустики
ШУМ НЕОДНОРОДНОГО ПОЛЯ ТУРБУЛЕНТНОСТИ, ВОЗДЕЙСТВУЮЩЕЙ
НА НЕОДНОРОДНОСТЬ АКУСТИЧЕСКОГО ИМПЕДАНСА ЕЁ ГРАНИЦЫ
В. Р. Гессен, канд. техн. наук, Е. Г. Комарова
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
THE NOISE OF AN INHOMOGENEOUS FIELD OF TURBULENCE, AFFECTING
THE INHOMOGENEITY JF THE ACOUSTIC IMPEDANCE OF ITS BOUNDARY
V. R. Gessen, Ph.D., E. G. Komarova
JSC «Concern «Sea underwater weapon – Gidropribor», St. Petersburg, Russia
Рассмотрено звуковое излучение псевдозвуковых пульсаций давления турбулентного пограничного слоя
(ТПС) на неоднородности импеданса его границы. Предложена свойственная скоростным
малогабаритным подводным аппаратам математическая модель неоднородного поля пульсаций
давления ТПС и представлен частотно-волновой спектр мощности такого поля. Приводятся расчётные
спектральные и пространственные характеристики рассматриваемого излучения для разных типов
неоднородности импеданса.
The sound radiation of pseudosonic pressure pulsations of a turbulent boundary layer (TPS) on the inhomogeneity
of the impedance of its boundary is considered in this report. A mathematical model of the inhomogeneous field
of pressure pulsations TPS for high-speed small-sized underwater vehicles is proposed and the frequency-wave
power spectrum of such a field is presented. The calculated spectral and spatial characteristics of the radiation
under consideration are given for different types of impedance inhomogeneity.
Современные скоростные малогабаритные подводные аппараты оснащаются системами
освещения гидроакустической обстановки. Приемные антенны таких информационных систем
располагают в передней части аппарата за звукопрозрачным обтекателем в непосредственной
близости к зоне возникновения ТПС, которая порождает шум и помеху работе систем.
Возбуждение шума происходит под воздействием на аппарат поля турбулентных
пульсаций давления, преимущественно псевдозвуковых, и, как показывают гидродинамические
расчеты, это поле пространственно-неоднородно вдоль вектора скорости набегающего потока и
ограничено точкой ламинарно-турбулентного перехода в начале пограничного слоя.
Рассмотрим воздействие ТПС на двухгранный жесткий прямоугольный клин. Случайные
возмущения ТПС возбуждают статистически случайные пульсации давления на плоскости,
расположенной параллельно горизонтальной грани угла и удаленной от нее на величину порядка
толщины h вязкого подслоя ТПС. Пульсации давления положим стационарными по времени,
однородными вдоль кромки угла и неоднородными вдоль потока.
Расчет спектра мощности турбулентного шума малогабаритного скоростного подводного
аппарата применительно к его антенне в точке приема проводится по формуле [1]
2
∞
����
���𝑥𝑥 , ���
���
��� ���� ���
��� ���� ���
���
𝑃𝑃0 (𝑅𝑅, 𝜔𝜔) = 𝑘𝑘 4 ∭−∞ 𝜑𝜑�(𝑅𝑅, 𝑘𝑘
𝑘𝑘𝑦𝑦 ) ∙ 𝜑𝜑� ∗ (𝑅𝑅, 𝑘𝑘
𝑥𝑥 ′, 𝑘𝑘𝑦𝑦 ) ∙ 𝐸𝐸н (𝑘𝑘, 𝑘𝑘𝑥𝑥 , 𝑘𝑘𝑥𝑥 ′, 𝑘𝑘𝑦𝑦 , 𝜔𝜔)𝑑𝑑𝑘𝑘𝑥𝑥 𝑑𝑑𝑘𝑘𝑥𝑥 ′𝑑𝑑𝑘𝑘𝑦𝑦 ,
(1)
где k — волновое число звука в воде; ω — циклическая рабочая частота антенны;
Eн — частотно-волновой спектр мощности турбулентных пульсаций давления в головной части
малогабаритных скоростных подводных аппаратов; φ — потенциал рассеяния звука; R — радиус
вектор от источников ТПС до точки приема в цилиндрической системе координат (ρ, y, γ).
Вид функции Eн получаем исходя из однородности и δ-коррелированности пульсаций
давления в направлении оси y, следуя аппроксимации (при x≥a) расчётных значений
неоднородности псевдозвуковых пульсаций давления ТПС Pт2 экспоненциальной функцией
вида: ���������
𝑃𝑃𝑇𝑇2 (𝑥𝑥) = �1 − 𝑒𝑒
−
𝑥𝑥−𝑎𝑎
𝛿𝛿1
� 𝑒𝑒
−
𝑥𝑥−𝑎𝑎
𝛿𝛿2
, — и допуская, что вдоль оси x нормированная взаимно-
корреляционная функция пульсаций соответствует известной модели Коркоса [2].
Пользуясь преобразованиями Фурье получаем выражение (2) для частотно-волнового
спектра поля давлений ТПС.
351
Методы прикладной гидроакустики
2
���������
𝑃𝑃т 𝑚𝑚𝑚𝑚𝑚𝑚 1 𝑏𝑏2 𝑀𝑀𝑐𝑐 𝑒𝑒
𝐸𝐸н (𝑘𝑘, ���
𝑘𝑘𝑥𝑥 , ����
𝑘𝑘𝑥𝑥 ′, ���
𝑘𝑘𝑦𝑦 , 𝜔𝜔) = (2𝜋𝜋)
2
3 𝑘𝑘 4
1
1
𝐷𝐷−𝑖𝑖𝑖𝑖
1
1
1
����
�����
−𝑖𝑖(𝑘𝑘
𝑥𝑥 −𝑘𝑘
𝑥𝑥 ′)𝑘𝑘𝑘𝑘
2
����
𝑏𝑏2 +𝑀𝑀𝑐𝑐 2 (𝑘𝑘
𝑦𝑦 )
1
1
1
1
1
1
1
{𝑖𝑖𝑖𝑖+𝑄𝑄 (𝐷𝐷−𝑖𝑖𝑖𝑖 − 𝐷𝐷−𝑄𝑄−𝑖𝑖𝑖𝑖) + 𝑖𝑖𝑖𝑖−𝑄𝑄 (𝐷𝐷−𝑄𝑄+𝑖𝑖𝑖𝑖 −
1
1
1
1
1
) − 𝑖𝑖𝑖𝑖+𝐵𝐵 (𝐸𝐸−𝑖𝑖𝑖𝑖 − 𝐷𝐷−𝑄𝑄−𝑖𝑖𝑖𝑖) − 𝑖𝑖𝑖𝑖−𝐶𝐶 (𝐹𝐹−𝑄𝑄+𝑖𝑖𝑖𝑖 − 𝐸𝐸−𝑖𝑖𝑖𝑖) − 𝑖𝑖𝑖𝑖+𝐶𝐶 (𝐸𝐸+𝑖𝑖𝑖𝑖 − 𝐹𝐹−𝑄𝑄−𝑖𝑖𝑖𝑖) −
1
1
1
1
1
1
1
(
− 𝐸𝐸−𝑖𝑖𝑖𝑖) + 𝑖𝑖𝑖𝑖+𝑄𝑄 (𝐹𝐹−𝑖𝑖𝑖𝑖 − 𝐹𝐹−𝑄𝑄−𝑖𝑖𝑖𝑖) + 𝑖𝑖𝑖𝑖−𝑄𝑄 (𝐹𝐹−𝑄𝑄+𝑖𝑖𝑖𝑖 − 𝐹𝐹−𝑄𝑄−𝑖𝑖𝑖𝑖)} ,
𝑖𝑖𝑖𝑖−𝐵𝐵 𝐸𝐸−𝑄𝑄+𝑖𝑖𝑖𝑖
(2)
где Pт max2 — спектр мощности пульсаций давления в максимуме распределения (Па2/Гц); δ1, δ2
0,55
, 𝑏𝑏2 =
— постоянные, характеризующие форму распределения спектра мощности [1]; 𝑏𝑏1 =
3,5
,
2𝜋𝜋
0,7 𝑢𝑢
𝑀𝑀𝑐𝑐 =
,
𝑐𝑐
u
—
скорость
основного
движения
2𝜋𝜋
потока
жидкости;
����+𝑘𝑘
�����′
1
𝑘𝑘
𝑏𝑏1
1
𝑏𝑏1
1
− 𝑥𝑥 2 𝑥𝑥 , 𝐵𝐵 = −
, 𝐶𝐶 = +
,
с — скорость звука в среде, 𝐴𝐴 =
Мс
𝑀𝑀𝑐𝑐
2𝑘𝑘𝛿𝛿1
𝑀𝑀𝑐𝑐
2𝑘𝑘𝛿𝛿1
����
�����
1
1
1
1
𝑘𝑘 +𝑘𝑘 ′
𝑏𝑏1
1
1
𝐸𝐸 = −( +
), 𝐹𝐹 = −( + 𝑘𝑘𝛿𝛿 ), 𝐺𝐺 = 𝑥𝑥 2 𝑥𝑥 , 𝑄𝑄 = , 𝑀𝑀 = 𝑀𝑀 − 𝑘𝑘𝑥𝑥 , 𝑁𝑁 = 𝑀𝑀 − 𝑘𝑘𝑥𝑥′ ,.
𝑘𝑘𝛿𝛿2
2𝑘𝑘𝛿𝛿1
𝑘𝑘𝛿𝛿2
Мс
1
𝑐𝑐
𝑐𝑐
𝐷𝐷 = −
1
,
𝑘𝑘𝛿𝛿2
Потенциал рассеяния звука над неоднородной поверхностью при γ=3π/2 и ρsinγ<0
определяем по формуле трансформации псевдозвука в звуковой шум [1]
ℎ
𝜋𝜋
�𝑘𝑘∙𝜌𝜌�1+ sin 𝛾𝛾�−і
і𝜘𝜘
����
𝑘𝑘𝑥𝑥
𝜌𝜌
4
�
1+𝑘𝑘𝑘𝑘𝛼𝛼
1
1
𝑒𝑒
����
𝜑𝜑 = 2√2𝜋𝜋 𝑒𝑒 −𝛼𝛼�𝑘𝑘∙ℎ 𝑒𝑒 і𝑘𝑘𝑦𝑦 𝑘𝑘∙𝑦𝑦 �1−𝑘𝑘𝑘𝑘𝛼𝛼� ∙ і𝜘𝜘 sin 𝛾𝛾+𝛼𝛼� − і𝜘𝜘 sin 𝛾𝛾−𝛼𝛼�� ∙
,
ℎ
��1+ sin 𝛾𝛾��
�𝑘𝑘∙𝜌𝜌�𝜘𝜘
(3)
𝜌𝜌
где y — принят равным 0; g — величина, пропорциональная импедансу горизонтальной грани;
ρ, y=0, γ — координаты точки приема в области x<0; h — высота источника шума над пластиной,
𝜘𝜘 = �𝑘𝑘 2 − 𝑘𝑘𝑦𝑦 2, 𝛼𝛼 = �𝑘𝑘𝑥𝑥 2 + 𝑘𝑘𝑦𝑦 2 − 𝑘𝑘 2 . При односторонней нагрузке пластины жидкостью
𝑘𝑘𝑘𝑘 = −
𝑖𝑖𝑖𝑖
, где z — импеданс «толстой» пластины; ρвод — плотность воды.
𝜌𝜌вод ∙с
Импеданс «толстой» изгибно-колеблющейся гомогенной пластины равен [3]:
𝑧𝑧 =
В
ℎ 2
ℎ
+ пл )−𝜔𝜔2 𝑚𝑚′′∙(1−𝜔𝜔 2 𝑚𝑚′′∙
)
𝐺𝐺ℎпл
12
12𝐺𝐺
ℎ
В
)
𝑖𝑖𝑖𝑖(1−𝜔𝜔 2 𝑚𝑚′′ пл +(𝑘𝑘𝑥𝑥 2 +𝑘𝑘𝑦𝑦 2 )
12𝐺𝐺
𝐺𝐺ℎпл
𝐵𝐵(1+𝑖𝑖∙𝜂𝜂)(𝑘𝑘𝑥𝑥 2 +𝑘𝑘𝑦𝑦 2 )−𝜔𝜔 2 𝑚𝑚′′∙(𝑘𝑘𝑥𝑥 2 +𝑘𝑘𝑦𝑦 2 )∙(
,
(4)
где m″ — поверхностная масса: 𝑚𝑚′′ = 𝜌𝜌пл ℎпл , ρпл — плотность материала пластины;
𝐸𝐸ℎпл
, где E — модуль Юнга; σ —
hпл — толщина пластины; В — изгибная жесткость: 𝐵𝐵 = 12(1−𝜎𝜎)
коэффициент Пуассона; η — коэффициент механических потерь; G — модуль сдвига: 𝐺𝐺 =
В табл. 1 приведены принятые в расчетах характеристики латуни.
Принятые в расчетах характеристики для латуни [1, 4−6]
𝐸𝐸
.
2(1+𝜎𝜎)
Таблица 1
Модуль
Юнга, Па
Коэффициент
Пуассона
Плотность,
кг/м3
Скорость
продольной
волны, м/с
Коэффициент
механических
потерь
Модуль
сдвига, Па
95·109
0,33
8500
3542
0,03
36·109
Результаты расчетов шума трансформации псевдозвука ТПС на неоднородности границы,
определенные по формуле (1), приведены для двух типов границы: латунь и локальнореагирующая граница (в данном случае — жесткая), при x>0 для точки наблюдения ρ=1 м, y=0,
γ=270° в диапазоне частот 7,5−60 кГц на рис. 1 (в дБ относительно 2·10-5 Па). Цифры на кривых
рисунка соответствует частотам в кГц.
352
Методы прикладной гидроакустики
Рис. 1. Уровни шума для латунной пластины и жесткой границы
Согласно приведенным на рис. 1 результатам рассматриваемый тип звукового излучения
в диапазоне частот 7,5−60 кГц характеризуется монотонно спадающими спектрами.
С увеличением расстояния а (неоднородности поля ТПС относительно стыка неоднородности
импеданса границы ТПС) значения шума уменьшаются. Причем это уменьшение, существенно
меньше для изгибно-колеблющейся пластины, нежели в присутствии локальной реакции
жесткой границы. Такое поведение шума является следствием волноводных свойств пластины,
благодаря которым энергия неоднородных волн ТПС передается по пластине и проникает в
точку приема.
Представленную математическую модель можно использовать, например, в практике
проектирования конструкций головных частей скоростного подводного оружия для снижения
турбулентной шумовой помехи.
Литература
1. Гессен В. Р. Разработка математической модели и средств уменьшения турбулентного шума.
Диссертация. 1985.
2. Сorcos G. M. Resolution of pressure in turbulence // JASA. 1963.Vol. 35. Р. 192.
3. Журнал «Acustica». 1969. Vol. 21, №3.
4. Хекл М. и Мюллера Х. А. Справочник по технической акустике. Л.: Судостроение, 1980.
5. Морз Ф. Колебания и звук. М.: Издательство «Технико-теоретической литературы», 1949.
6. Ляпунов В. Т., Никифоров А. С. Виброизоляция в судовых конструкциях. Л.: Судостроение, 1975.
353
Методы прикладной гидроакустики
МНОГОЛУЧЕВОЕ ГИДРОАКУСТИЧЕСКОЕ ПРОФИЛИРОВАНИЕ ДОННОГО
ГРУНТА
М. А. Бородин1,2, канд. техн. наук, А. В. Вагин1,2
1
Кировский филиал АО «Концерн «Океанприбор», г. Кировск, Ленинградская область, Россия
2
СПб государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
MULTIBEAM HYDROACOUSTIC PROFILING OF BOTTOM SOIL
M. A. Borodin1,2, Ph.D., A. V. Vagin1,2
1
Kirovsk branch of JSC «Concern «Oceanpribor», Kirovsk, Leningrad region, Russia
2
St. Petersburg State Electrotechnical University «LETI», St. Petersburg, Russia
Рассмотрено многолучевое гидроакустическое профилирование донного грунта. Представлены
амплитудные развертки макета многолучевого эхолота при различных углах приема отраженных эхосигналов. Выполнена теоретическая оценка потенциально возможного сектора обзора при многолучевом
профилировании.
Multibeam hydroacoustic profiling of bottom soil is considered. Amplitude scans of a multibeam echo sounder
model are presented at different angles of reception of reflected echo-signals. A theoretical assessment of the
potential viewing sector for multibeam profiling has been carried out.
Для получения непрерывной информации о строении донного грунта по линии движения
судна-носителя используются гидроакустические профилографы, — низкочастотные эхолоты,
обеспечивающие зондирование донного грунта до скального основания при выполнении
грунтовой съемки [1].
Близкую перспективу развития представляет актуальная задача расширения возможностей
гидроакустического профилирования при морских подводных инженерно-геологических
изысканиях разной направленности за счёт применения многолучевого гидроакустического
профилографа (МГП).
Создание МГП обеспечивается возможностью получения информации о структуре
донного грунта в ограниченном секторе обзора в плоскости поперёк движения судна-носителя,
что позволяет кратно повысить производительность процесса профилирования донного грунта в
реальном времени.
В рамках создания МГП рассмотрим гидролокационное изображение дна, полученное при
испытаниях макета многолучевого эхолота (МЛЭ) в натурных условиях на Ладожском полигоне
АО «Концерн «Океанприбор».
Макет МЛЭ состоит из излучающей и приемной гидроакустических антенн, соединенных
Т-образно, а также приборной части. Параметры макета, следующие:
− рабочая частота равна 75 кГц;
− излучаемый сигнал — тональный импульс длительностью 0,2 мс;
− сектор обзора в траверзной плоскости равен 90°;
− разрешающая способность по углу в траверзной плоскости равна 1,5°;
− число приемных характеристик направленности (лучей) равно 107.
На рис. 1 представлены фрагменты гидролокационного изображения дна — амплитудные
развертки по лучам в координатах «отстояние от дна — пройденный путь», содержащие
амплитуду принятых эхо-сигналов от границы раздела «вода-дно» и от слоев донного грунта для
углов наклона лучей относительно нормали к поверхности приемной антенны МЛЭ (углов
приема) θ: 0°; 5°; 10°; 15°; 20°; 30°.
Для отображения использовано цветовое кодирование амплитуды принятых эхо-сигналов,
в котором черный цвет соответствует минимальному значению, а белый – максимальному.
На рис. 2 представлен профильный разрез донного грунта в районе проведения натурных
испытаний макета МЛЭ, полученный профилографом ПГ-300, разработанным АО «Концерн
«Океанприбор». Отстояние от дна менялось в пределах от 10 до 35 м. Вертикальный разрез
скорости звука в воде близок к постоянному.
354
Методы прикладной гидроакустики
Рис. 1. Амплитудные развертки по пространственным каналам макета МЛЭ
Рис. 2. Профильный разрез донного грунта
355
Методы прикладной гидроакустики
Анализируя фрагменты амплитудных разверток с рис. 1 по мере увеличения угла приема
отмечаем следующее:
− глубина профилирования уменьшается, что связано дополнительным ослаблением
сигнала в донном грунте, возникающим при увеличении длины трассы распространения сигнала
при наклонном облучении;
− ухудшается разрешающая способность по глубине слоя, что обусловлено увеличением
длительности эхо-сигналов от донных слоев.
Отметим, что представленные гидролокационные изображения на рис. 1 получены при
минимальном для макета МЛЭ излучаемом давлении, составляющем около 10 кПа∙м. Очевидно,
что при увеличении излучаемого давления глубина профилирования будет также увеличиваться.
Получение информации о строении донного грунта для макета МЛЭ возможно в
в секторе обзора порядка ±15° с учетом симметрии углового положения лучей
относительно нормали к поверхности приемной антенны.
Для обеспечения многолучевого профилирования донного грунта в более широком секторе
обзора нужно использовать специализированный МГП с достаточным энергетическим
потенциалом и со сложными сигналами, обеспечивающими высокое разрешение по дальности.
Создание специализированного МГП требует предварительно теоретической оценки
потенциально возможного сектора обзора при заданной разрешающей способности по углу и
наклонной дальности.
Расчет вышеуказанной оценки основывается на решении уравнения активной
гидролокации [2]:
Q(θ, H c ) = δ2 ,
где Q (θ, H c ) — отношение «сигнал/помеха» (ОСП); δ
2
— пороговое значение отношения
сигнал/помеха (ОСП) по интенсивности; Н c — расстояние от поверхности дна в толщу донного
грунта до верхней границы слоя скального грунта; θ — угол приёма.
ОСП рассчитывается по формуле (1):
J s (θ, Н c )
Q(θ, Н c ) = 10 lg
,
J а + J эш + J ад + J ат + JV (θ, Н c )
(1)
где J s ( θ, Н c ) — интенсивность эхо-сигнала реверберации от нижнего слоя донного грунта
(полезный эхо-сигнал); J а — интенсивность акустических шумов носителя в месте установки
гидроакустической антенны МГП; J эш — интенсивность помехи, обусловленной электрическими
шумами аппаратуры МГП; J ад — интенсивность помехи, обусловленной динамическими шумами
моря; J ат — интенсивность помехи, обусловленной тепловыми шумами моря; JV (θ, Н c ) —
интенсивность помехи, обусловленной объемной реверберацией в донном грунте.
Интенсивность полезного эхо-сигнала рассчитывают по формуле (2):
J
J s (θ, Н c ) = и
×10−0.2βв H ×10−0.2βг H c ×
( 4π )2 r 4
(2)
+0.5∆θ +0.5∆φ
2
2
2
2
× ∫
∫ BS ( θ′,φ′) T12 ( θ′,φ′) T21 ( θ′,φ′) Fи ( θ′,φ′) Fпр ( θ′,φ′) Sп ( θ′,φ′) dθ′dφ′,
−0.5∆θ −0.5∆φ
356
Методы прикладной гидроакустики
где J и — интенсивность излучаемого сигнала; =
r H + Н c ; H — отстояние антенны МГП от
поверхности дна; β в — коэффициент затухания акустических волн в воде; βг — коэффициент
затухания акустических волн в донном грунте; BS ( θ′,φ′ ) — коэффициент обратного рассеяния
[3]; θ′ — угол в плоскости поперек направления движения носителя антенны МГП; φ′ — угол
′ ′
12 ( θ ,φ ) — коэффициент
в плоскости вдоль направления движения носителя антенны МГП; T
′ ′
21 ( θ ,φ ) — коэффициент прохождения
акустических волн из донного грунта в водную среду [4]; Fи ( θ′,φ′ ) — характеристика
прохождения акустических волн в донный грунт; T
направленности (ХН) антенны МГП в излучении по давлению; Fпр ( θ′,φ′ ) — ХН антенны МГП
в приеме по давлению; Sп ( θ′,φ′ ) — площадь поверхности донного грунта, которая рассеивает
акустические волны обратно к антенне МГП.
Интенсивности помех в выражении (1) определяются по известным формулам из [5].
Результатом решения уравнения (1) является зависимость ширины сектора обзора от угла приема
и расстояния от поверхности дна в толщу донного грунта до верхней границы слоя скального
грунта.
Результаты теоретической оценки сектора обзора для макета МЛЭ, выполненные по
формуле (1), находятся в согласии с экспериментальными данными, представленными на рис. 1.
Таким образом, подтверждается возможность получения информации о строении донного
грунта в секторе обзора порядка ±15°, также представлена и апробирована методика
теоретической оценки сектора обзора для создания МГП.
Литература
1. Информационная гидроакустика: методы информационного обеспечения гидроакустическими
средствами / Под ред. А. Д. Консона. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2023. 368 с.
2. Евтютов А. П., Митько В. Б. Инженерные расчеты в гидроакустике. 2-е изд., перераб. и доп. Л.:
Судостроение, 1988. 288 с.
3. Jackson D. R., Odom R. I., Boyd M. L., Ivakin A. N. A Geoacoustic Bottom Interaction Model (GABIM)
// IEEE J. Oceanic Eng. 2010. Vol. 35, № 3. P. 603−617.
4. Бреховских Л. М. Волны в слоистых средах. М.: Наука, 1973. 340 с.
5. Урик Р. Дж. Основы гидроакустики. Л.: Судостроение, 1978. 448 с.
357
Методы прикладной гидроакустики
ИНТЕРФЕРОМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА «СВИРЬ».
РЕЗУЛЬТАТЫ ИСПЫТАНИЙ В НАТУРНЫХ УСЛОВИЯХ
А. В. Водилов, А. И. Демидов, Е. А. Прохоров, А. В. Скнаря, канд. техн. наук
АО «НИИП им. В. В. Тихомирова», Жуковский, Московская область, Россия
INTERFEROMETRIC SIDE-SCAN SONAR «SVIR».
THE RESULTS OF THE FIELD TESTS
A. V. Vodilov, A. I. Demidov, E. A. Prokhorov, A. V. Sknaria, Ph.D.
JSC «V. V. Tikhomirov Scientific Research Institute of Instrument Engineering», Zhukovsky, Moscow region,
Russia
В настоящей статье рассмотрены вопросы, относящиеся к разработке в АО «НИИП имени
В. В. Тихомирова» интерферометрических гидролокаторов бокового обзора. Представлены некоторые
результаты
обработки
реальных
данных,
полученных
с
помощью
разработанного
интерферометрического гидролокатора бокового обзора в ходе проведения работ по обследованию
подводных трубопроводов.
This article discusses issues related to the development of interferometric side-scan sonars at JSC
«V. V. Tikhomirov Scientific Research Institute of Instrument Engineering». Some results of processing real data
obtained using the developed interferometric side-scan sonar during the survey of underwater pipelines are
presented.
В настоящее время, актуальным вопросом является импортозамещение зарубежных
гидролокационных систем различного назначения.
Повседневными проблемными остаются вопросы обследования гидроузлов,
гидроэлектростанций, контроля состояния подводных трубопроводов, а также вопросы, которые
влияют как на экологию, так и на повседневную жизнь и деятельность людей. Основными
средствами решения этих вопросов являются в том числе и интерферометрические
гидролокаторы бокового обзора (ИГБО), позволяющие одновременно получить
высококачественное акустическое изображение поверхности дна, выполнить инструментальную
оценку рельефа дна и построить его карту глубин. Подобную функцию могут выполнять также
гидролокатор бокового обзора (ГБО), многолучевой и однолучевой эхолоты.
В последнее время развитие технических возможностей построения современных ГБО
позволило получать акустические изображения поверхности дна высокого качества. Но
дальнейшее повышение информативности акустического исследования поверхности дна связано
с развитием технологии и техники получения детального рельефа и формирования трехмерного
изображения подстилающей поверхности. Поэтому, на сегодняшний день задача создания
технологий и гидроакустических комплексов, способных в сложных гидроакустических
условиях с высокой точностью и высокой разрешающей способностью формировать кроме
акустических изображений, также трехмерные изображения рельефа дна является актуальной.
Такую задачу способен решить, в частности, разработанный в АО «НИИП им. В. В. Тихомирова»
интерферометрический гидролокатор бокового обзора с эхолотом (ИГБО-Э).
ИГБО имеет следующие параметры:
− центральная частота — f0 = 500 кГц;
− ширина спектра зондирующего сигнала — ΔF=60кГц;
− разрешающая способность по дальности — ΔR=1,25см;
− Диаграмма направленности (ДН) приемо-излучающей антенны — (0,25×40) градусов;
− максимальная дальность действия — 190 м;
− ДН эхолота — (9×9) градусов;
− тип зондирующего сигнала — ЛЧМ импульс;
− размеры электронного блока 362×306×150.
Принцип действия ИГБО основан на нахождении разности фаз между двумя сигналами,
отраженными от одного и того же элемента разрешения на поверхности дна и принятыми двумя
разнесенными в пространстве приемными антеннами (рис. 1). Найденная разность фаз является
основой для оценки глубины исследуемого участка дна [1].
358
Методы прикладной гидроакустики
Рис. 1. Геометрия обзора поверхности дна ИГБО
Рис. 2. Блок-схема этапов обработки эхосигналов в однобазовом ИГБО
На рис. 2 приведена блок-схема этапов обработки эхосигналов в однобазовом ИГБО.
В блок-схеме: АП — антенный переключатель; ПРД — передатчик; ПРМ1 — приемный тракт
первого приемного канала; ПРМ2 — приемный тракт второго приемного канала; ИРФ —
интерферометрическая разность фаз.
Ниже, на примере данных, полученных в процессе испытаний интерферометрического
гидролокатора бокового обзора на реке Москва, приведены некоторые результаты обработки.
На рис. 3, в качестве примера, представлены, акустическое изображение (слева) и
яркостное изображение карты глубин подстилающей поверхности (справа) с одного из
промерных галсов в режиме реального времени.
На рис. 4 и рис. 5 представлены выкладки обработанных данных в географических
координатах WGS-84 на планшет в режиме реального времени.
359
Методы прикладной гидроакустики
а
б
Рис. 3. Пример обработки в реальном времени данных ИГБО
а — акустическое изображение поверхности дна; б — карта глубин
Рис. 4. Выкладка данных ИГБО на планшет
360
Методы прикладной гидроакустики
Рис. 5. Выкладка сшитых данных ИГБО на планшет
Разработанные алгоритмы сбора и обработки гидролокационных данных на первичном
этапе автоматизированы и позволяют производить отображение на экране монитора
акустических данных и карты глубин в различных режимах в реальном времени.
Литература
1. Болдинов Р. О., Скнаря А. В., Баскаков А. И. Потенциальная точность интерферометрического
гидролокатора бокового обзора // Вестник МЭИ. 2016. № 3. С. 66–71.
2. Матвиенко Ю. В., Воронин В. А., Тарасов С. П., Скнаря А. В., Тутынин Е. В. Пути
совершенствования гидроакустических технологий обследования морского дна с использованием
автономных необитаемых подводных аппаратов // Подводные исследования и робототехника. 2009.
№ 2(8).
361
ИНЖЕНЕРНОЕ ОБЕСПЕЧЕНИЕ
ГИДРОФИЗИКИ И ГИДРОАКУСТИКИ
МНОГОПРОЦЕССОРНЫЕ СИСТЕМЫ СИГНАЛЬНОЙ ОБРАБОТКИ
С. Е. Власов, д-р техн. наук, А. Н. Годунов, канд. физ.-мат. наук, А. И. Грюнталь, канд. физ.-мат. наук
НИЦ «Курчатовский институт» ФГУ ФНЦ НИИСИ РАН, Москва, Россия
MULTIPROCESSOR SIGNAL PROCESSING SYSTEMS
S. E. Vlasov, Dr.Sc., A. N. Godunov, Ph.D., А. I. Griuntal, Ph.D.
Kurchatov Institute SRISA, Moscow, Russia
Рассматриваются вопросы реализации вычислительных алгоритмов сигнальной обработки. Приводятся
методы распараллеливания алгоритмов и реализации алгоритмов на многопроцессорных вычислительных
системах на базе коммуникационной среды RapidIO.
The issues of implementing computational algorithms for signal processing are considered. Methods for creating
parallelizing algorithms and implementing algorithms on multiprocessor computing systems are presented based
on RapidIO communication environment.
Постановка задачи. Основной аспект при обработке сигналов — обеспечение высокой
производительности. Требуемая производительность достигается путём применения различных
видов распараллеливания. Ниже мы приведём вычислительную схему алгоритма обработки
сигналов, методы распараллеливания и реализацию этих методов.
Логическая единица обработки сигнальной информации — отсчёт. Отсчёт представляет
собой трёхмерный числовой массив данных m (x, y, z). Две координаты отсчёта — это
пространственные координаты, соответствующие геометрическому расположению источников,
третья координата — значение, зависящее от времени. Пространственные координаты
обозначаются через X и Y, а временная координата — через Z.
Организация параллелизма. Отсчёты последовательно поступают на вход
вычислительной системы. Алгоритмы обработки отсчётов в основном представляют собой
процедуры линейной алгебры [1]. Обработка носит многостадийный характер. В процессе
обработки отсчёт последовательно проходит несколько шагов (стадий) алгоритма. Стадия
выполняется на одном или на группе процессоров. Различные стадии могут выполняться на
различных группах процессоров.
Передача данных между группами процессоров осуществляется с помощью
высокопроизводительной среды. Схематично прохождение отсчёта по вычислительным стадиям
можно изобразить в виде рисунка (рис. 1). Размеры отсчёта от стадии к стадии также могут
изменяться.
Вычислительная процедура обработки отсчёта в одной стадии может быть параллельной.
Для параллельной обработки одна из координат, например координата X, разбивается на
несколько диапазонов значений, скажем X1,…, Xn, и преобразование Фурье выполняется для
каждой последовательности значений m (x, y, z), где x и y фиксированы, x принадлежит Xi, y
принадлежит Y, z принадлежит Z, m(x, y, z) — значение отсчёта для параметров x, y и z. Такая
обработка может быть выполнена n независимыми процессорами.
362
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 1. Цифровая обработка одного отсчёта
в вычислительной стадии
Рис. 2. Разбиение отсчёта
на группы значений
В типовом случае обработка выполняется для двумерного массива данных, который
получается из трёхмерного отсчёта путем фиксации значения одной из переменных.
В этом случае множество значений переменной, которая фиксируется, разбивается на
группы. Такое разбиение на группы порождает разбиение на группы значений всего отсчёта.
Каждая группа данных обрабатывается независимо от других групп.
На рис. 2 значения переменной X разбиты на три группы X1, X2 и X3, и каждая из групп,
условно обозначаемых через Xi×Y×Z параллельно обрабатывается одним и тем же алгоритмом.
Отметим, что фиксированные переменные для соседних стадий различны. Поэтому
разбиения отсчёта на инвариантные группы соседних стадий могут различаться (рис. 2 и 3).
Данные, поступающие на один процессор, могут обрабатываться параллельно потоковым
сопроцессором, выполняющим одну программу над несколькими экземплярами данных
одновременно. В рабочем цикле посредством DMA данные переписывается из памяти
процессора в память сопроцессора. Затем данные обрабатываются сопроцессором, и результаты
выгружаются в память основного процессора.
Рис. 3. Передача данных между процессорами
363
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 4. Схема универсального вычислительного ядра и сопроцессора
Вычислительная система. Вычислительная система сигнальной обработки состоит из
процессоров с сопроцессорами потоковой обработки данных. Процессоры соединены сетью
RapidIO. Фрагменты сети соединены коммутаторами, осуществляющими маршрутизацию
передаваемых по RapidIO пакетов. В состав процессора входят два управляющих и два
потоковых сопроцессора, а также память для хранения коэффициентов, необходимых для
вычисления быстрого преобразования Фурье.
Каждый процессор снабжается собственной оперативной памятью, образуя
вычислительный домен. Схема универсального вычислительного ядра и потокового
сопроцессора приведены на (рис. 4).
Планирование и программирование вычислительного процесса происходит в несколько
шагов. Вначале все процессоры разбиваются на группы. Каждая группа процессоров выполняет
одну и ту же стадию. Затем для каждой стадии проектируются и пишутся программы обработки.
Эти программы рассылаются процессорам по сети RapidIO при старте системы. При получении
очередного отсчёта программы начинают обработку данных и отправляют результаты обработки
на следующую стадию.
Программная и аппаратная реализация. Вычислительный комплекс сигнальной
обработки представляет собой набор специализированных процессоров, соединённых средой
RapidIO, для быстрой передачи данных.
Процессоры вычислительной системы функционируют под управлением операционной
системы реального времени ОС РВ Багет 3.x [2].
Литература
1. Робинер Л., Гоулд Б. Теория цифровой обработки. М.: Мир, 1978.
2. Годунов А. Н., Солдатов В. А. Операционные системы семейства Багет (сходство, различия,
перспективы) // Программирование. 2014. № 5. С. 68−76.
364
Инженерное обеспечение гидрофизики и гидроакустики
ОПРЕДЕЛЕНИЕ МЕЖКОНТРОЛЬНОГО ИНТЕРВАЛА С ПРИМЕНЕНИЕМ
ОПЕРАТИВНОЙ ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА АППАРАТУРЫ
В СОСТАВЕ ГИДРОАКУСТИЧЕСКОГО КОМПЛЕКСА
И. А. Красников
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
DEFINITION OF THE INTERCONTROL INTERVAL USING OPERATIONAL
ASSESSMENT OF THE RESIDUAL RESOURCE OF THE EQUIPMENT
AS A PART OF THE HYDROACOUSTIC COMPLEX
I. A. Krasnikov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В статье рассмотрена проблема определения межконтрольного интервала для автоматической
системы контроля, относительно которого строится система оперативной оценки остаточного
ресурса аппаратуры в составе гидроакустического комплекса.
In article the problem of definition of the intercontrol interval for the automatic monitoring system concerning
which the system of the operational assessment of the residual resource of the equipment as a part of the
hydroacoustic complex is under construction is considered.
В процессе эксплуатации радиоэлектронная аппаратура (РЭА) в составе
гидроакустического комплекса (ГАК) подвержена различным внешним дестабилизирующим
воздействиям. Это приводит не только к внезапным отказам, характеризующимся
скачкообразным изменением значений какого-либо параметра, но и к постепенным отказам,
возникающим в результате деградационных процессов в радиоэлементах и характеризующимся
постепенным изменением значений одного или нескольких параметров объекта. Последние
составляют подавляющую часть (до 90 %) [1] от общего числа отказов. При этом внезапные
отказы в основном возникают из-за несовершенства технологии производства или нарушения
правил эксплуатации и, как правило, являются явными.
Предсказать и предотвратить постепенные отказы, то есть поддержать работоспособное
состояние РЭА в составе ГАК — это одна из важнейших функциональных задач при ее
эксплуатации. Это задача оперативной оценки технического состояния аппаратуры
гидроакустического комплекс — прогнозирование технического состояния. Одним из путей
повышения эффективности технической эксплуатации аппаратуры является переход к гибким
стратегиям, основанным на учете информации о фактическом состоянии РЭА при определении
сроков проведения контроля технического состояния.
Определение наиболее рациональных интервалов времени между измерениями при
контроле, обеспечивают повышение эффективности эксплуатации ГАК. Так при завышенном
межконтрольном интервале (МИ) возрастает вероятность возникновения постепенных отказов,
что может привести к срыву выполнения целевых задач и дополнительным затратам на ремонт,
а при необоснованно сокращенном межконтрольном интервале увеличивается время отрыва
РЭА от выполнения целевых задач и возрастают затраты на ее эксплуатацию [2].
Апостериорный расчёт МИ для многоканальной части ГАК. При отсутствии
ограничения на прерывание штатной работы необходимо определить оптимальный
межконтрольный интервал конкретно к данному моменту времени, а оптимизация будет
происходить по значению вероятности нахождения контролируемого параметра в допуске на
будущий интервал контроля. В идеальном случае МИ T→0, тогда в соответствии с
достоверностью D→1. Фактически это невозможно из-за ряда ограничений:
- темп обработки данных от ЭК Tэк;
- темп передачи данных в ЭВМ от блока приёма данных к блоку контроля Tбк;
- вычислительная мощность ЭВМ Wэвм.
Ввиду ограничений МИ T = 0 невозможен.
Основные положения для выбора МИ для отдельного (элементарного канала) ЭК.
Значение коэффициента передачи K(t) для n ЭК может находиться в интервале (1):
365
Инженерное обеспечение гидрофизики и гидроакустики
K (t )i ∈ {K (t )imin , K (t )imax } ,
(1)
где i = 1…n, K (t )i min , K (t )i max — априорно определённое максимальное и минимальное значение
для K(t).
Основные положения для выбора межконтрольного интервала для многоканальной части
в целом. Значение N(t) количество, отказавших ЭК, по условию (1) должно быть ограничено (2):
(2)
N (t ) < M ,
где M — критерий отказа по многоканальной части.
Определение вероятности нахождения ЭК в исправном состоянии внутри МИ (3):
{
pi =
P ( K ( t )i ∈ K ( t )i
min
, K ( t )i
max
} ,t < T ) .
(3)
Определение вероятности нахождения многоканальной части ГАК в исправном состоянии
внутри межконтрольного интервала (4):
=
p P( N ( t ) < M , t < T ) .
(4)
Подставляя в (4) условие (3) и (2) получим (5):
{
M
p=
∏P( K ( t )i ∈ K ( t )i
i
Вероятность
{
P ( K ( t )i ∈ K ( t )i
min
, K ( t )i
max
min
, K ( t )i
} ,t < T )
max
} ,t < T ) .
определяется
(5)
из
значения
интенсивности отказов ЭК λi:
t = tж
P ( K ( t )i ∈ K ( t )i , K ( t )i
, t <=
T ) exp − ∫ λ ( t ) =
dt exp ( −λt ) .
min
max
0
{
}
(6)
Подставляя в (6) условие (5), получим (7):
=
p (t )
M
∏ exp ( −λ t ) .
i
(7)
i
Ввиду того, что все ЭК эквиваленты друг другу:
λ1 = λ 2 = … = λ n = λ .
(8)
Учитывая условие (8) выражение (7) преобразуется в (9):
p ( t ) = Me −λt .
(9)
После получения апостериорных данных по интенсивности отказов в соответствии с
выражением:
n ( t ) − n ( ti −1 )
λ [ti ] =i
,
N p ∆t
366
(10)
Инженерное обеспечение гидрофизики и гидроакустики
где n(ti) — количество отказавших каналов в момент времени ti; n(ti-1) — количество отказавших
каналов в момент времени ti-1; Np — количество исправных каналов на момент ti; ∆t — интервал
времени между отсчетами ti-1 и ti.
По (10) и алгоритму МНК получим выражение для экстраполяции λ(t) (11):
n t2 n λ − n t n tλ
∑ i ∑i 1 i =
∑i 1=
i ∑i 1 i i
t .
× exp =i 1 =
n
n
n
n
n
n
2
2
.
.
n=
t
t
t
n
t
t
t
−
−
∑i 1 i =
∑i 1=
∑i 1 i =
∑i 1=
i ∑i 1 i
i ∑i 1 i
=
n=
∑ i 1ti λi −=
∑ i 1t=
i ∑ i 1λ i
n
=
λ (t )
n
n
(11)
Подставляя (11) в (9) получим аналитическое выражение для p(t) (12)
n t2 n λ − n t n tλ
∑ i ∑i 1 i =
∑i 1=
i ∑i 1 i i
× exp =i 1 =
M exp[
t ] .
n
n
n
n
n
n
2
2
−
−
.
.
n=
t
t
t
n
t
t
t
∑i 1 i =
∑i 1=
∑i 1 i =
∑i 1=
i ∑i 1 i
i ∑i 1 i
=
n=
∑ i 1ti λi −=
∑ i 1t=
i ∑ i 1λ i
n
p (t )
n
n
(12)
Для p(t) выбирается значение maxp(t). Межконтрольный интервал полагается равным t1,
которое соответствует условию (13):
n=
∑ i 1ti λi −=
∑ i 1t=
i ∑ i 1λ i
n
:{ p ( t ) M exp[
T t1=
=
n
n
n=
∑ i 1ti 2 −=
∑ i 1t=
i ∑ i 1ti .
n
n
n
×
(13)
t 2 ∑ i 1λ i −=
ti ∑ i 1ti λ i
∑
∑
i 1 i=
i 1=
=
× exp
t ]} ≈ max p ( t ) .
n
n
n
2
−
.
n
t
t
t
∑i 1 i =
∑i 1=
i ∑i 1 i
=
n
n
n
n
Из (13) следует, что МИ T непостоянен, а зависим от λ, то есть, реализована гибкая
стратегия эксплуатации — не по априорной надёжности, а по апостериорной информации о
техническом состоянии объекта. Определение межконтрольного интервала с применением
оперативной оценки остаточного ресурса аппаратуры в составе гидроакустического комплекса,
то есть реализации прогнозирования технического состояния позволяет реализовать стратегию
эксплуатации ГАК не по надёжности, а по фактическому техническому состоянию.
Литература
1. Красников И. А. Возможность прогнозируемого контроля работоспособности гидроакустических
комплексов // Гидроакустика. 2018. Вып. 36(4).
2. Красников И. А. Оперативная оценка остаточного ресурса цифровой аппаратуры в составе
гидроакустического комплекса // Сб. трудов 2 науч.-пркат. конф. молодых специалистов интегрированной
структуры АО «Концерн «Океанприбор» ИСТОК-2018. СПб. 2018.
367
Инженерное обеспечение гидрофизики и гидроакустики
ИМИТАТОР ИЗОБРАЖЕНИЙ ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА
ДЛЯ ТЕРНАЖЕРА ОПЕРАТОРА И ГЕНЕРАЦИИ ВЫБОРОК ДЛЯ ОБУЧЕНИЯ
НЕЙРОСЕТЕВЫХ АЛГОРИТМОВ ПОМОЩИ ОПЕРАТОРА
Н. А. Алексеев, М. А. Короткий, С. М. Ларионов, С. В. Романов
ООО «Экран», Жуковский, Россия
A SIMULATOR OF SIDE-VIEW SONAR IMAGES FOR THE OPERATOR'S
SIMULATOR AND SAMPLE GENERATION FOR TRAINING NEURAL NETWORK
ALGORITHMS FOR OPERATOR ASSISTANCE
N. A. Alekseev, M. A. Korotkiy, S. M. Larionov, S. V. Romanov
LLC «Ekran», Zhukovsky, Russia
Доклад посвящен принципам работы и принятым решениям при разработке автоматизированного
синтезатора изображений ГБО. Синтезирование является дешевым способом получения
гидролокационных изображений в задачах обучения нейросетевых алгоритмов и обучения операторов
ГБО.
The report is devoted to the principles of operation and decisions taken in the development of an automated
side-view sonar image synthesizer. Synthesis is a cheap way to obtain sonar images in the tasks of training neural
network algorithms and training side-view sonar operators.
На данный момент, обучение нейросетевых систем в области распознавания изображений
требует больших объемов размеченных данных. Если для повседневных бытовых задач такие
размеченные данные, как правило, уже имеются в открытом доступе, то размеченных
гидролокационных изображений почти не существует. И даже если взяться за разметку
накопленных изображений, может оказаться, что некоторые типы объектов представлены
слишком малой выборкой недостаточной для качественного обучения нейросети.
Похожие проблемы возникают и при обучении операторов гидроакустических устройств.
Просматривая ранее полученные изображения, будущий оператор получает лишь некоторое
представление об особенностях гидролокационных изображений, но основной опыт приходится
получать на практике. Возможность синтезировать гидролокационные изображения по
собственному сценарию открывает путь к созданию качественного тренажера оператора,
значительно удешевляя и упрощая процесс подготовки оператора.
Мы сосредоточились на имитации изображений гидролокаторов бокового обзора (ГБО),
как самого популярного на текущей момент средства обзора поверхности дна. Можно выделить
основные требования к имитатору изображений: стоимость разработки, достоверность
изображений, быстродействие, удобство использования. Если предлагаемое решение не
удовлетворяет по любому из этих параметров, оно лишено пути в жизнь. Изображения
гидролокатора бокового обзора хоть с первого взгляда и похожи на фотографии вида сверху,
называемыми в геодезии ортофотоплановыми снимками, на самом деле имеют ряд
существенных отличий, обусловленных физикой процесса получения изображения, характерных
только для гидролокации и радиолокации. Так на гидролокационных снимках присутствует
«водяной столб» — область изображения, отображающая толщу воды под носителем ГБО,
инверсия отображения вертикальных объектов, наложение изображения вертикальных объектов
на область дна у их подножия, а также отображение боковых поверхностей невидимых при
взгляде на объект сверху (рис. 1).
Без учета вышеназванных особенностей, тренажер оператора имеет смысл только с точки
зрения эксплуатации прибора, но не поможет оператору привыкнуть к специфике
гидролокационных изображений.
368
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 1. Особенности формирования изображения ГБО
Не менее важным является насыщенность, наполненность объектами имитируемых сцен.
После того как удастся создать математический аппарат для формирования снимков ГБО, встает
вопрос удобства обращения с ним. На сколько разнообразными могут быть объекты на дне, на
столько же разнообразным может быть и сама поверхность дна. Удобные средства создания и
редактирования моделируемой обстановки являются необходимой составляющей
разрабатываемого программного обеспечения. Рациональным решением для моделирования дна
является использование распространенных 3д-редакторов, таких как Компас-3Д, SolidWorks или
3D-Max. В нашем решении мы остановились на программе Blender. Это программа с открытым
исходным кодом, распространяемая по лицензии GNU General Public License — свободная
лицензия с авторским правом на программное обеспечение, в соответствии с которой любой
может применять и изменять программное обеспечение в любых целях. Данный тип лицензии,
открытость кода и благоприятная среда для его модификации обеспечила популярность
программы и поддержку сообщества разработчиков по всему миру, из-за чего в программе
имеется широкий выбор подключаемых авторских функций.
Рис. 2. Пример генерации изображений ГБО с масками объектов и теней для тренировки нейросети
369
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 3. Пример прохода локатором ГБО на разном отдалении от объекта на дне
Используя данные функции, можно относительно легко создавать процедурногенерируемые рельефы. Процедурная генерация означает, что описываются лишь правила
создания рельефа, а саму реализацию осуществляет компьютер. Кроме того, процедурная
генерация использует псевдослучайные последовательности чисел, опирающиеся на начальное
значение называемое «зерно» (англ. «seed»). Это значит, что каждая генерация рельефа
уникальна, но в то же время строго соответствует своему «зерну» и в точности повторяема.
Применительно к процессу обучения нейросетей мы реализовали процедурную генерацию
нескольких типов рельефа, а также методом процедурной генерации расположили объекты на
поверхности, после чего для генерации обучающей выборки достаточно запустить процедуру в
цикле. Небольшая модификация программы, позволяет создать автоматическую разметку для
обучения нейросети в виде масок объектов. Так на рисунке ниже представлены два случайных
кадра из сгенерированной серии изображений обучения нейросети. На них представлены:
изображение ГБО, маски объектов, маски озвучиваемой гидролокатором частей объектов, маска
теней (рис. 2).
Для тренажера оператора применяется другой, но похожий подход. Используя
процедурную генерацию «создается» большая карта местности с разными типами рельефа и
расположенными на ней объектами. На самом деле как таковой карты нет — есть лишь
математический закон, описывающий правила её построения. Для формирования изображения
ГБО генерируется только тот участок местности, который, в соответствии с нашими текущими
координатами, в данный момент попадет в кадр. Так как карта формируется с помощью
псевдослучайных последовательностей, каждый раз, при использовании определенного зерна, в
конкретных координатах карты будет лежать один и тот же объект (рис. 3).
370
Инженерное обеспечение гидрофизики и гидроакустики
НЕЙРОСЕТЕВОЙ АЛГОРИТМ ОБНАРУЖЕНИЯ АНОМАЛИЙ
НА ГИДРОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЯХ
Н. А. Алексеев, И. А. Павелкин, М. А. Короткий, С. В. Романов, С. Э. Юсупов
ООО «Экран», Жуковский, Россия
NEURAL NETWORK ALGORITHM FOR ANOMALY DETECTION
IN HYDROLOCATION IMAGES
N. A. Alekseev, I. A. Pavelkin, M. A. Korotkiy, S. V. Romanov, S. E. Yusupov
LLC «Ekran», Zhukovsky, Russia
В связи с повышением требований к системам подводного мониторинга возникает необходимость
разработки современных интеллектуальных алгоритмов обработки гидролокационных изображений.
Сформированы обучающие наборы данных. Поставлена задача обнаружения аномалий на
гидролокационных данных. Предложен алгоритм обнаружения аномалий в области дна. Подготовлена
тестовая выборка, на которой получены значения метрик вероятность правильного обнаружения и
пиксельная вероятность ложного обнаружения со значениями 0,8 и 0,09 соответственно.
With the increasing demands for underwater monitoring systems, there is a need to develop modern intelligent
algorithms for processing hydrolocation images. Training datasets have been formed. The task of anomaly
detection in hydrolocation data is posed. An algorithm for detecting anomalies in the seabed area is proposed.
A test sample has been prepared, on which the metrics of the probability of correct detection and pixel probability
of false detection were obtained with values of 0,8 and 0,09, respectively.
В настоящее время задача по изучению дна водных акваторий является перспективной с
точки зрения спасательных операций [1], исследовательских работ по изучению морского дна
[2], рыболовства [3, 4], поиска подводных объектов — потенциальных источников загрязнений
акваторий и создания угрозы жизни населению [5]. Распространённым способом получения
информации о поверхности дна рек, озер и других водоемов является использование
гидролокатора бокового обзора (ГБО). Перспективные подходы анализа гидролокационных
изображений (ГЛИ) основаны на сверточных нейронных сетях [6, 7]. Но у данного подхода есть
ограничения, потому что параметры такого подхода, как правило, настраиваются для поиска
определенных классов объектов, что ограничивает возможность обнаружения объектов, которые
не представлены в обучающем наборе данных. Таким образом, данная работа посвящена
созданию алгоритма обнаружения аномалий на ГЛИ, для которого снижаются требования по
представлению всех классов объектов в обучающем наборе данных. Аномалиями являются
объекты, которые не характерны для подстилающей поверхности. Примеры аномалий приведен
на рис. 1 и выделены белым контуром.
Предлагается следующая постановка задачи: на вход алгоритму подается ГЛИ, на выходе
алгоритм должен выдать массив с координатами объектов на ГЛИ. Архитектура алгоритма
разделена на 3 основных блока: предобработка изображения за счет использования
семантической сегментационной нейронной сети на базе архитектуры LinkNet [8], обнаружения
аномалий на ГЛИ при помощи нейросетевой модели, архитектура которой идейно основана на
модели компьютерного зрения U-Net [9], и постобработки результатов нейросетевой модели при
помощи классических алгоритмов компьютерного зрения для определения координат объектов.
Рис. 1. Пример ГЛИ, содержащего аномалии
371
Инженерное обеспечение гидрофизики и гидроакустики
В ходе работы подготовлены 2 обучающих набора данных. Первый обучающий набор
данных содержит 14893 области без аномалий и 1094 области с аномалиями для обучения и
тестирования алгоритма поиска аномалий соответственно. Второй обучающий набор данных для
обучения семантической сегментационной нейронной сети включает в себя 1605 ГЛИ размера
1024 на 1024 пикселей и разметку (рис. 2). Каждая сегментационная разметка (маска) имеет
одинаковую структуру и состоит из 5 семантических зон (рис. 2), наименования которых
приведены в табл. 1.
Наименование зон ГЛИ
Номер зоны
1
2
3
4
5
Таблица 1
Наименование зоны
Зона акустической тени (толща воды)
Линия раздела акустической тени и области дна
Зона дна
Линия раздела области дна и берега
Зона переотражения (берег)
а
б
Рис. 2. Пример элемента обучающего набора данных
а — ГЛИ; б — соответствующая сегментационная разметка
Для оценки качества работы алгоритма использовались две метрики: попиксельная доля
ложно обнаруженных объектов (Bad area) и доля правильно обнаруженных объектов (Recall).
P−P∩G
Bad area = img_size,
(1)
где P — предсказанная маска; G — истинная маска, img_size - размер изображения.
𝑇𝑇𝑇𝑇
𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅 = 𝑇𝑇𝑇𝑇+𝐹𝐹𝐹𝐹,
(2)
где TP (True Positive) — количество правильно обнаруженных аномалий при условии, что
предсказанный ограничивающий прямоугольник пересекается с истинным ограничивающим
прямоугольником не менее чем на 0,30, FN (False Negative) — это количество аномалий, у
которых предсказанные ограничивающие прямоугольники пересекаются с истинными менее чем
на 0,30.
372
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 3. Результат работы алгоритма
В результате разработанный алгоритм обрабатывает одно ГЛИ размером 872×788
пикселей со скоростью 6,46 секунды на процессоре AMD Ryzen 5 3500U. Получены точности 0,8
и 0,09 по метрикам доли правильно обнаруженных объектов и попиксельной доли ложно
обнаруженных объектов соответственно. Пример работы алгоритма приведен на рис. 3.
В дальнейшем планируется повышение точности работы алгоритма за счет дообучения
алгоритма восстановления подстилающих поверхностей на расширенном наборе данных и
обработки исходных гидролокационных данных.
Литература
1. John J. Schultz, Carrie A. Healy, Kenneth Parker, Bim Lowers. Detecting submerged objects // The
application of side scan sonar to forensic contexts.
2. Долотов С. А., Каевицер В. И., Кривцов А. П., Разманов В. М., Смольянинов И. В. Применение
интерферометрического гбо с лчм зондирующим сигналом для исследования морского дна // «Экология
2004 – море и человек». 268 с.
3. Волощенко А. П. Применение гидролокатора бокового обзора для обнаружения рыболовных
сетей // Известия СПбГЭТУ ЛЭТИ. 2021. №. 3. С. 10−16.
4. Ражев А. О., Недоступ А. А. Мониторинг процесса управления траловой конструкцией и
объекта лова с применением гидролокатора // Балтийский морской ФОРУМ. 2022. С. 270−278.
5. Makhotkin D., Koltok N., Grishin N., Bukharov K., Semenkin V. Signalization of objects on the sonar
images using neural network segmentation methods/. 2021.
6. Połap D., Wawrzyniak N., Włodarczyk-Sielicka M. Side-scan sonar analysis using ROI analysis and
deep neural networks // IEEE Transactions on Geoscience and Remote Sensing. 2022. Т. 60. С. 1−8.
7. Ge Q. et al. Side-scan sonar image classification based on style transfer and pre-trained convolutional
neural networks //Electronics. 2021. Т. 10, №. 15. С. 1823.
8. Chaurasia A., Culurciello E. LinkNet: Exploiting Encoder Representations for Efficient Semantic
Segmentation. 2017.
9. Ronneberger O. Fischer P. Brox T. U-Net: Convolutional Networks for Biomedical Image
Segmentation. 2015.
373
Инженерное обеспечение гидрофизики и гидроакустики
АЛГОРИТМ ОБНАРУЖЕНИЯ ОБЪЕКТОВ НА ГИДРОЛОКАЦИОННЫХ
ИЗОБРАЖЕНИЯХ НА ОСНОВЕ ДЕТЕРМИНИРОВАННЫХ МЕТОДОВ
ИЗВЛЕЧЕНИЯ ПРИЗНАКОВ
Н. Г. Колток, И. А. Павелкин, Д. Г. Пчелинцев, С. В. Романов
ООО «Экран», Жуковский, Россия
ALGORITHM FOR OBJECT DETECTION IN HYDROLOCATION IMAGES BASED
ON DETERMINISTIC FEATURE EXTRACTION METHODS
N. G. Koltok, I. A. Pavelkin, D. G. Pchelintsev, S. V. Romanov
LLC «Ekran», Zhukovsky, Russia
В работе рассмотрено применение детерминированных методов извлечения признаков из изображений
для задачи обнаружения объектов на гидролокационных изображениях. На основе выбранных метрик
качества проведен сравнительный анализ эффективности методов: статистического, главных
компонент, пространственной кластеризации, текстурного и яркостного. Разработан алгоритм
обнаружения объектов на гидролокационных изображениях с применением детерминированных методов
извлечения признаков.
This paper considers the application of deterministic feature extraction methods from images for the task of object
detection in hydrolocation images. Based on the selected quality metrics, a comparative analysis of the
effectiveness of the following methods is conducted: statistical, principal components, spatial clustering, textural,
and brightness. An algorithm for detecting objects in hydrolocation images using deterministic feature extraction
methods has been developed.
Одним из основных современных инструментов для сбора информации о поверхности дна
различных водоемов является гидролокатор бокового обзора (ГБО). ГБО широко применяются
в рыболовстве [1], при возведении и обслуживании промышленных подводных объектов [2, 3],
при проведении экологических [4] и археологических [5] исследований поверхности дна.
Популярным современным инструментом для обработки и анализа гидролокационных
изображений (ГЛИ) являются свёрточные нейронные сети [6]. Необходимым условием высокого
качества работы является наличие объемной базы соответствующих данных для формирования
репрезентативных обучающих наборов данных для обучения нейронной сети. Проблема
недостатка данных может быть решена путём применения детерминированных алгоритмов
извлечения признаков из ГЛИ. Принципиальным отличием таких алгоритмов от нейросетевых
является то, что выбор признакового пространства, на основе которого происходит обнаружение
объектов, осуществляется не автоматически, а путем предварительного выбора определённого
набора свойств. Таким образом, для работы детерминированных алгоритмов не требуется
наличие большого объема данных для обучения.
Предлагается следующая постановка задачи: на вход алгоритму подается ГЛИ, на выходе
алгоритм должен выдать массив с координатами объектов на ГЛИ. Архитектура алгоритма
обнаружения объектов строится как двухстадийный детектор. На первой стадии работы
предсказывается наличие объекта в небольших областях, а на второй стадии предсказания
агрегируются в маску предсказания. Блок-схема алгоритма обнаружения объектов представлена
на рис. 1. В ходе работы подготовлен обучающий набор данных для анализа алгоритмов
извлечения признаков и обучения классификатора. Обучающий набор данных включает 221351
областей размером 30×30 пикселей с объектами и 236591 областей размером 30×30 пикселей без
объектов. Были использованы следующие 5 методов извлечения признаков: статистический,
главных компонент, пространственной кластеризации изображений, яркостный и текстурный.
Сравнительный анализ качества классификации областей на основе отдельно взятых признаков
приведен в табл. 1. Где полнота выражается как доля обнаруженных алгоритмом объектов,
совпавших с объектами в тестовой разметке, от всех объектов из разметки. А доля выделенной
лишней области, в свою очередь, выражается как доля захваченной алгоритмом области, не
содержащей объект, от всего рассматриваемого ГЛИ. При этом объект, обнаруженный
алгоритмом, считался совпавшим с объектом в тестовой разметке, если выделенная алгоритмом
область ГЛИ пересекала любой объект в тестовой разметке хотя бы на 50 %.
374
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 1. Блок-схема алгоритма обнаружения объектов
Значения метрик качества классификации на извлеченных признаках
Таблица 1
Наименование метода
извлечения признаков
Значение метрики
полноты
Значение метрики доли
выделенной лишней области
Статистический
Метод главных компонент
Метод пространственной
кластеризации
Яркостный
Текстурный
0,983
0,991
0,239
0,325
0,983
0,282
0,983
0,991
0,269
0,418
Для классификации областей на основе всех извлеченных признаков рассматривались
алгоритмы классического машинного обучения: логистическая регрессия и RandomForest. Было
проведено сравнение качества работы классификаторов (табл. 2).
Значение метрик качества классификации использованных классификаторов
Таблица 2
Классификатор
Значение метрики
полноты
Значение метрики доли выделенной
лишней области
Случайный лес
0,9826
0,219
Логистическая регрессия
0,9739
0,260
Финальный алгоритм обрабатывает одно ГЛИ размером 907×760 пикселей за 59 секунд на
процессоре amd ryzen 7 5800X и тестовой выборке имеет точности 0,87 по метрике полноты и
0,1 по метрике доли выделенной лишней области.
375
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 2. Результат работы алгоритма
В дальнейшем планируется оптимизация алгоритмов по точности работы путем
фильтрации обнаруженных объектов посредством сегментации ГЛИ на области воды, дна и
берега и по времени работы за счет векторизации операций.
Литература
1. Ражев А. О., Недоступ А. А. Мониторинг процесса управления траловой конструкцией и
объекта лова с применением гидролокатора // Балтийский морской ФОРУМ. 2022. С. 270−278.
2. Кожухова М. Е., Корнюкова Ж. Ю., Лукьянченко А. А. Перспективы применения гидролокатора
бокового обзора для обследования и мониторинга инженерных сооружений // Сб. Э40 Экология, проблемы
приморских территорий. 2017. С. 20.
3. Павин А. М. Идентификация подводных протяженных объектов на акустических снимках
гидролокатора бокового обзора // Приборы. 2009. №. 12. С. 43−50.
4. Каевицер В. И. и др. Подводные грязевые вулканы Таманского полуострова (по данным
гидролокационных исследований) // Вулканология и сейсмология. 2016. №. 4. С. 27−33.
5. Лебединский В. В., Пронина Ю. А. Подводно-археологическая разведка у берегов Абхазии с
применением гидролокатора бокового обзора // Вопросы подводной археологии. 2011. №. 1. С. 21−41.
6. Li Z. et al. A survey of convolutional neural networks: analysis, applications, and prospects // IEEE
transactions on neural networks and learning systems. 2021.
376
Инженерное обеспечение гидрофизики и гидроакустики
АНАЛИЗ ГИДРОАКУСТИЧЕСКИХ ДАННЫХ С ПРИМЕНЕНИЕМ МЕТОДОВ
МАШИННОГО ОБУЧЕНИЯ И НЕЙРОННЫХ СЕТЕЙ
И. И. Викснин1, канд. техн. наук, М. С. Куприянов1, д-р техн. наук, И. А. Селезнев2, д-р техн. наук,
Т. А. Турушев1, Е. Е. Гоголев1, Е. Л. Шейнман1,2, д-р техн. наук
1
СПб государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
2
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
ANALYSIS OF HYDROACOUSTIC DATA BASED ON MACHINE LEARNING
AND NEURAL NETWORKS METHODS
I. I. Viksnin1, Ph.D., M. S. Kupriyanov1, Dr.Sc., I. A. Seleznev2, Dr.Sc., T. A. Turushev1, E. E. Gogolev1,
E. L. Sheinman2, Dr.Sc.
1
St. Petersburg State Electrotechnical University «LETI», St. Petersburg, Russia
2
JSC «Concern «Oceanpribor», St. Petersburg, Russia
Анализ гидроакустических данных является комплексной задачей, требующей наличия у исследователя
как теоретических знаний, так и практических навыков. Современный научно-технический уровень в
области искусственного интеллекта позволяет заявить о принципиальной возможности применения
методов машинного обучения и нейронных сетей для решения задач обнаружения и классификации
объектов на основе гидроакустических данных.
Analysis of hydroacoustic data is a complex task, which required from scientists not only theoretical knowledges,
but also practical skills. Current level of science and technical solutions in field of artificial intelligence allow to
make a hypothesis about possible usage methods of machine learning and artificial neural networks to solve tasks
of object’s detection and classification presented in hydroacoustic way.
Постановка задачи. Проведенное исследование было направлено на подтверждение
гипотезы о возможности применения методов искусственного интеллекта для решения задачи
освещения подводной в части обнаружения и классификации объектов по данным
гидроакустического анализа. Для подтверждения выдвинутой гипотезы рассматривался вопрос
возможности применения методов машинного обучения и нейронных сетей для классификации
данных гидроакустического анализа [1], включая данные, полученные при отсутствии
наблюдаемого объекта (помеха), обученных на синтетических данных и тестируемые на
собранных реальных данных. Решение задачи классификации (и приведенной к ней задачи
обнаружения) предложенным образом позволит говорить о возможности автоматизированного
поиска неявных закономерностей на данных, полученных в ходе моделирования, и их
применимости на реальных данных классификации. Общая последовательность планируемого
решения задачи может быть представлена следующим образом:
1. Первичный анализ данных.
2. Использование «традиционных» методов машинного обучения.
3. Формирование системы методов машинного обучения и нейронных сетей с учетом
характера данных.
Анализ данных. В рамках первичного анализа был проведен базовый анализ
синтетических данных (зависимость признаков, оценка отдельных признаков и автокорреляции,
структура данных и т.д.). Для начального этапа подтверждения гипотезы был сформирован набор
гидроакустических данных в формате 512 частот и их значения для каждого объекта выборки,
местоположение объекта, пеленг, тип объекта. Сформированный набор данных содержал более
10 тысяч записей объектов двух классов и помехи, при этом, имелся дисбаланс выборки —
объекты класса 0 составляли ~36 % выборки, класса 1 — ~45 %, а класса 2 — ~9 %. Объекты
класса 2 — помеха, т.е. гидроакустические данные, собранные при отсутствии реального объекта.
Стоит отметить, что в рамках сбора реальных данных ситуация обратная — количество объектов
класса 2 является наибольшим, а классы 0 и 1 представлены незначительно.
На первом этапе анализа было решено использовать существующие традиционные методы
машинного обучения [2], на основе анализа результатов применения которых можно сделать
вывод о дальнейших направлениях исследования. Базовые результаты (табл. 1) были получены
на следующих моделях — линейная регрессия (ЛР), метод k ближайших соседей (КБС),
377
Инженерное обеспечение гидрофизики и гидроакустики
случайный лес (СЛ), градиентный бустинг (ГБ) [3]. Модели обучались и проверялись на
синтетических данных (разделение выборки происходило случайным образом — 70 %
обучающая, 30 % тестовая).
Таблица 1
Результаты обучения и тестирования на синтетических данных
Точность
Ф-мера
ЛР
0,67
0,71
КБС
0,71
0,79
СЛ
0,94
0,94
ГБ
0,92
0,93
Стоит отметить, представленные результаты были получены без тонкой настройки
гиперпараметров, что позволяет говорить о существовании значимых зависимостей на
синтетических данных. Однако, представленные результаты не были подтверждены при
тестировании на реальной выборке, т.е. зависимости, найденные на синтетических данных, не
соответствуют зависимостям, предположительно имеющимся на реальных данных. При этом
первичный анализ данных показал существование зависимостей на реальных данных.
На следующем этапе исследования было решено использовать различные архитектуры
нейронных сетей, которые позволяют повысить уровень абстракции, снижая возможность
интерпретации итоговых алгоритмов принятия решений. Одной из наиболее перспективных
архитектур нейронных сетей с точки зрения результатов первичного анализа (табл. 2) является
архитектура рекуррентной нейронной сети с длинной краткосрочной памятью (LSTM).
Приведены результаты применения LSTM на имеющихся данных (истинные значения по
строкам, предсказанные — по столбцам).
Таблица 2
Точность классификации различных объектов выборки
Класс 0
0,75
0,83
0,28
Класс 0
Класс 1
Класс 2
Класс 1
0,23
0,16
0,66
Класс 2
0,02
0,01
0,06
Таким образом, результаты, полученные с использованием LSTM значительно превосходят
результаты использования «традиционных» методов машинного обучения. Однако, объекты
класса 2 в значительной степени относятся к объектам класса 1. Обучение и тестирование на двух
классах с удаленными объектами класса помеха позволили получить следующие результаты
(табл. 3).
Точность классификации различных объектов выборки на двух классах
Класс 0
Класс 1
Класс 0
Класс 1
0,77
0,17
0,22
0,83
Таблица 3
Помимо анализа данных в исходном и слабоизмененном видах было принято обучить
LSTM на спектрограммах. Результаты обучения для трех классов также признаны
неудовлетворительными из-за малой точности классификации объектов класса 2. Результаты
обучения на двух классах выглядят следующим образом (табл. 4).
378
Инженерное обеспечение гидрофизики и гидроакустики
Точность классификации различных объектов выборки на двух классах
при обучении на спектрограммах
Класс 0
Класс 1
Класс 0
Класс 1
0,77
0,17
0,22
0,83
Таблица 4
Представленные результаты исследования позволяют говорить о перспективах
использования методов машинного обучения и нейронных сетей для дальнейшего развития их
применения в вопросах анализа гидроакустических данных.
Перспективы развития. На основе представленных данных можно сделать заключение о
подтверждении гипотезы о возможности применения методов искусственного интеллекта для
решения задачи освещения подводной в части классификации объектов по данным
гидроакустического анализа была подтверждена. При этом задача обнаружения объектов может
быть решена с помощью более сложных механизмов искусственного интеллекта. Помимо
разработки решений на базе имеющихся традиционных методов возможен переход к
использованию комбинации сверточных и рекуррентных сетей, а также к системе
автоматического дообучения предлагаемых методов на основе обучения с подкреплением.
В качестве основы для дообучения могут выступать как действия со стороны эксплуатантаоператора системы, использующей механизмы дообучения, так и со стороны иных смежных
систем, анализирующих схожие данные, но в другом виде (включая иное разделение по классам).
Дисбаланс классов может быть нивелирован за счет формирования системы дообучения в
фоновом режиме без значительного влияния на взаимодействие с оператором при недостаточном
уровне обученности.
Литература
1. Hu G. et al. Deep learning methods for underwater target feature extraction and recognition //
Computational intelligence and neuroscience. 2018. Т. 2018.
2. Yang H. et al. Competitive deep-belief networks for underwater acoustic target recognition // Sensors.
2018. Vol. 18, №. 4. С. 952.
3. Li D., Azimi-Sadjadi M. R., Robinson M. Comparison of different classification algorithms for underwater
target discrimination // IEEE Transactions on Neural Networks. 2004. Vol. 15, №. 1. С. 189−194.
379
Инженерное обеспечение гидрофизики и гидроакустики
АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ
ЧУВСТВИТЕЛЬНОСТИ НИЗКОЧАСТОТНЫХ ПРИЁМНИКОВ ДАВЛЕНИЯ
В. Н. Антонов, П. Д. Груздев, С. В. Соколов, В. А. Фокина
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
AN AUTOMATED EQUIPMENT FOR MEASURING THE SENSITIVITY
OF LOW-FREQUENCY PRESSURE RECEIVERS
V. N. Antonov, P. D. Gruzdev, S. V. Sokolov, V. A. Fokina
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
В статье рассмотрена конструктивная схема, описание узлов и программного обеспечения
автоматизированной установки для измерения чувствительности низкочастотных приёмников давления
(ПД) гидростатическим методом. Проведены измерения чувствительности ПД на частотах в единицы
Гц. Измеренные значения чувствительности соотнесены с полученными при проверках ПД в камере
малого объема и электростатическим методом.
The article discusses the design scheme, description of the components and software of an automated equipment
for measuring the sensitivity of low-frequency pressure receivers (PR) by the hydrostatic method. The sensitivity
of PR at frequencies in units of Hz has been measured. The measured sensitivity values are correlated with those
obtained during PR checks in small volume chamber and by the electrostatic method.
В гидроакустических информационно-измерительных системах наряду со сферическими
и цилиндрическими приёмниками давления (ПД) (гидрофонами) широкое применение находят
низкочастотные ПД, в которых используются стержневые (пакетные) и пластинчатые
пьезопреобразователи (ПП) [1].
Для оценки чувствительности ПД в диапазоне низких звуковых и инфразвуковых частот
обычно используются методы, основанные на измерениях в статическом режиме. Это в основном
электростатический метод (метод дополнительного электрода) и метод измерения в
колеблющемся столбе жидкости (метод переменной глубины) [2, 3]. Электростатический метод
дополнительного электрода применим только для ПД, обладающих плоской металлической
мембраной, на малом расстоянии от поверхности которой помещают металлический электрод.
С использованием этого метода калибруются ПД со стержневыми ПП.
Для сравнительных измерений ПД различных типов применим гидростатический метод
измерения в столбе колеблющейся жидкости. Он работает по принципу воздействия на ПД
переменного гидростатического давления, обеспечивающегося изменением уровня h столба
жидкости. Его изменение на 0,1 м соответствует изменению гидростатического давления P на
981 Па в соответствии с выражением: P=ρ·g·h, где ρ — плотность воды; g — ускорение силы
тяжести. Для определения задаваемого давления могут быть применены измерительная шкала
или датчик смещения, определяющие точное положение погружного тела, либо эталонный
приёмник давления, размещенный рядом с испытываемым. Относя величину выходного сигнала
ПД к воздействующему давлению, получаем значение чувствительности ПД. Такой метод
обеспечивает градуировку в диапазоне 0−3 Гц [2].
Для определения на низкой частоте чувствительности ПД без металлической мембраны на
рабочей поверхности была собрана измерительная установка (рис. 1).
Описываемая установка представляет из себя заполненную водой вертикальную трубу
диаметром 110 мм, в которой двигается цилиндрическое погружное тело (1) диаметром 80 мм, и
имеется смотровое окно с измерительной шкалой (2). Испытываемый ПД (3) герметично
установлен в нижнюю часть трубы. Приёмник подключен к усилителю (4), который идентичен
используемому в стержневом ПД, выходной сигнал регистрируется цифровым осциллографом
(5). При заглублении погружного тела вытеснение жидкости и подъем её уровня на 0,1 м
приводит к изменению гидростатического давления на 981 Па. Величина выходного сигнала в
пересчёте на воздействующее давление соответствует значению чувствительности ПД.
380
Инженерное обеспечение гидрофизики и гидроакустики
а
б
Рис. 1. Установка для определения чувствительности ПД на низкой частоте
а — схема построения; б — 3D модель корпусной части
Перемещение погружного тела производится шаговым двигателем (6) с помощью
винтового линейного привода (7). Точность хода шагового двигателя позволяет не использовать
обратную связь. Отсутствие необходимости применения эталонного приёмника давления или
датчика перемещения позволило максимально упростить данную установку. Для определения
фактической зависимости изменения уровня воды (давления) от количества шагов двигателя
проводилась калибровка. Результаты нескольких калибровок отличались не более чем на 5 %.
Управление шаговым двигателем производится через микроконтроллер с силовым драйвером (8)
с помощью компьютера (9). Программа компьютера задавала частоту и амплитуду колебания
погружного тела. В память микроконтроллера записана программа, которая обеспечивает
движение погружного тела согласно цифровым командам с ПК, с низкой частотой
дискретизации. Чтобы убрать скачки, обусловленные низкой частотой дискретизации,
программа управления реализует алгоритм, в котором скорость перемещения погружного тела
рассчитывается для каждой дискреты. Таким образом, график линейного смещения погружного
тела от времени представляет из себя аппроксимацию синусоиды. Некоторая инерционность
всей системы позволяет получить на выходе ПД неискаженный гармонический сигнал. На
установке возможно проведение измерений на частотах до 3 Гц. Нижняя граница частоты в
первую очередь определяется свойствами ПД, в частности характеристиками согласующего
усилителя для ПД на пьезокерамических чувствительных элементах.
Сравнительные измерения чувствительности проводились на стержневом ПД с
металлической мембраной и чувствительными элементами в виде составных стержневых
пьезопреобразователей и пластинчатом ПД. Последний имеет уменьшенный габарит за счет
применения биморфных пластинчатых пьезопреобразователей вместо стержневых и отсутствия
металлической мембраны на рабочей поверхности. Герметизация преобразователей
пластинчатого ПД выполнена полиуретаном. Измерения чувствительности стержневого ПД
производились на установке дополнительного электрода, в камере малого объема и на
гидростатической установке. Измерения чувствительности пластинчатого ПД производились
аналогично, за исключением измерений электростатическим методом. Следует учитывать, что
каждый метод применим в определенном диапазоне частот измерения, поэтому
чувствительности ПД на установке дополнительного электрода и в камере малого объема
определялись на частотах 20−60 Гц. Сравнение результатов, полученных на разных частотах,
проведено с учетом линейности АЧХ подобных ПД на частотах от единиц до десятков Гц.
Усредненные за серии измерений значения чувствительности приёмников приведены в табл. 1.
381
Инженерное обеспечение гидрофизики и гидроакустики
Таблица 1
Данные измерений чувствительности ПД
Чувствительность, мкВ/Па
Стержневой ПД
Пластинчатый ПД
В колеблющемся
столбе жидкости
Электростатический
метод
Камера
малого объема
330
320
350
-----
350
340
Сравнительные измерения двух типов ПД различными методами показали, что
автоматизированная установка, основанная на гидростатическом методе, позволяет достоверно,
с точностью около 6 %, определять чувствительность приёмников на частотах ниже 3 Гц.
Достоинства автоматизированной измерительной установки заключаются не только в
простоте конструкции и наглядности процесса измерения (изменение уровня воды всегда можно
проконтролировать через смотровое окно с измерительной шкалой 2, рис. 1), но и в том, что она
также является имитатором гидродинамических полей реальных судов.
Данный автоматизированный имитатор гидродинамических полей судов позволяет
воспроизводить записи полей реальных целей или поля судов, смоделированные по
теоретическим расчётам. Таким образом, с помощью имитатора можно не только измерять
чувствительность приёмников давления, но и отлаживать работу всего гидродинамического
канала.
Литература
1. Подводные электроакустические преобразователи / Под ред. В. В. Богородского // Справочник
Л.: Судостроение, 1983. 248 с.
2. Боббер Р. Д. Гидроакустические измерения. М.: Мир, 1974. 368 с.
3. Колесников А. Е. Акустические измерения. Л.: Судостроение, 1983. 256 с.
382
Инженерное обеспечение гидрофизики и гидроакустики
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ДИСПЕРСНЫХ НЕОРГАНИЧЕСКИХ
НАПОЛНИТЕЛЕЙ ЭПОКСИДНОГО КЛЕЯ ДМ-5-65 НА СТРУКТУРУ
И ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ КЛЕЯ
А. В. Краснов, Г. А. Никитин, С. И. Пугачев, д-р техн. наук, С. А. Чижев
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
STUDY OF THE EFFECT OF DISPERSE INORGANIC FILLERS
OF THE EPOXY DM-5-65 ON ITS STRUCTURE AND PERFORMANCE
A. V. Krasnov, G. A. Nikitin, S. I. Pugachev, Dr.Sc., S. A. Chizhev
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Приведены и обсуждены экспериментальные результаты по определению влияния пьезокерамических
наполнителей эпоксидного клея ДМ-5-65, применяемого для изготовления электроакустических
преобразователей (ЭАП), на структуру и физико-механические характеристики клея. Исследовано
влияние наполнителей системы цирконата-титаната свинца (ЦТС) на электрофизические
характеристики составных стержневых ЭАП.
The paper presents and discusses the results of an investigation into the effect of piezoceramic fillers of the epoxy
DM-5-65 used to glue electroacoustic transducers on its structure and performance. The effect of the fillers of the
lead zirconate-titanate (PZT) system on electrophysical parameters of composite rod transducers is analyzed.
Введение. Для соединения активных и пассивных элементов составных ЭАП
гидроакустических антенн (ГА) применяется эпоксидный клей ДМ-5-65 [1]. В состав клея входят
(в весовых частях): связующее — эпоксидная смола ЭД-20 (100); отвердитель — малеиновый
ангидрид (50); дисперсные неорганические наполнители: титанат бария (100), оксид алюминия
(50), оксид цинка (10); и катализатор отверждения — триэтаноламин (0,6).
Разработанный еще в 60-х годах XX столетия этот клей применялся для изготовления ЭАП,
содержащих пьезокерамические элементы (ПКЭ) из титаната бария (ТБ). Этим, в частности,
объяснялось использование в качестве пьезокерамического наполнителя мелкодисперсного
порошка ТБ.
В современных ЭАП применяются пьезокерамики ЦТС, а в ряде случаев — титаната
бария-кальция (ТБК) [2]. Возможно, разработчиков ГА удовлетворила близость акустического
импеданса материалов ТБ и ЦТС, однако, скорее всего, они не учитывали, что замена
наполнителя влияет на степень сродства адгезива (клея) и субстрата (пьезокерамики).
Поскольку наполнители считают третьим по значимости (после связующего и
наполнителя) компонентом клея [3, 4], оптимизация его состава посредством выбора
пьезокерамического наполнителя, близкого по своей природе к активному материалу,
применяемому в составном ЭАП, представляется актуальной задачей.
Влияние пьезокерамических наполнителей на структуру и физико-механические
характеристики клея ДМ-5-65. Проведены морфологические исследования, определены
краевой угол смачивания и свободная поверхностная энергия отвержденного клея по методу
Оуэнса-Вендта-Рабеля-Кьельбе [5, 6], а также удельная поверхность порошков наполнителей по
методу Брунауера-Эммета-Теллера [7]. Фазовая структура, характер межфазных границ и
морфология матрицы образцов клея исследованы на просвет в диапазоне длин волн от 200 нм до
1200 нм. Использованы режимы светлого поля, темного поля, фазового контраста и скрещенных
николей.
Деформационно-прочностные и термомеханические свойства клея. Образцы клея
подвергали одноосному растяжению. Определили модули упругости Е, напряжения и
деформации при разрушении образца σр и εр, (табл. 1).
Термомеханические свойства образцов исследовали методом динамического
механического анализа. В результате определили температуру стеклования образцов (табл. 2).
Видно, что повышенной температурой стеклования характеризуются клеи с наполнителями
системы ЦТС. Это говорит о более высоком уровне взаимодействия наполнителей системы ЦТС
с эпоксидной матрицей по сравнению с наполнителем ТБ [8]. Такое взаимодействие может
носить как физический, так и химический характер [9].
383
Инженерное обеспечение гидрофизики и гидроакустики
Таблица 1
Механические свойства образцов
Наполнитель
Е, ГПа
σр, МПа
εр, %
ТБ
ТБК-3
ЦТБС-3
ЦТС-19
4770±250
4922±244
4825±333
5192±397
33,31±5,42
42,51±5,21
48,54±6,81
42,70±2,41
0,97±0,12
1,67±0,36
1,75±0,43
1,13±0,24
Таблица 2
Температура стеклования образцов
Температура стеклования,
°С
82,5
78,0
92,5
90,0
Наполнитель
ТБ
ТБК-3
ЦТБС-3
ЦТС-19
Механические испытания соединений клей-металл. Прочность соединений клейметалл определяли по ГОСТ 14760-69. Наибольший предел прочности получен в соединениях с
пьезокерамическими наполнителями ТБК-3 и ЦТС-19 (табл. 3).
Механические испытания соединений клей–металл
Таблица 3
Наполнитель
Предел прочности, МПа
Характер разрыва
ТБ
ТБК-3
ЦТБС-3
ЦТС-19
70,0
76,0
70,7
74,1
Клей на одной стороне грибка
Отрыв по клею
Клей на одной стороне грибка
Отрыв по клею
Из экспериментов следует, что физико-химическая природа наполнителей обусловливает
их распределение в связующем, взаимную упорядоченность макромолекул матрицы и
свободную поверхностную энергию.
Влияние пьезокерамических наполнителей клея на электрофизические
характеристики ЭАП. Исследовали 140 составных ЭАП, содержащих ПКЭ из материала
ЦТСтБС-2, разделенных на 4 равные партии. В клей вводили мелкодисперсные порошки
пьезокерамических наполнителей ТБ, ТБК-3, ЦТБС-3, ЦТС-19 [10]. Испытания проводили в
слабом и сильном электрическом поле по методикам, представленным в работах [11, 12].
В слабом поле определяли: Fр — частоту резонанса; Fар — частоту антирезонанса;
Uр — напряжение на резонансе; Uар — напряжение на антирезонансе; Fap-Fp — резонансный
промежуток; C — электрическую емкость; tgδ — тангенс угла диэлектрических потерь.
В сильном поле определяли FрA и А — частоты резонанса и полной амплитуды
напряжения.
Выше было указано, что в состав клея ДМ-5-65 входят три неорганических наполнителя.
Эксперименты показали, что замена одного из них, ТБ, на ТБК-3, ЦТС-19 или ЦТБС-3 не оказала
существенного влияния на ряд физико-механических характеристики клея и электрофизические
характеристики изготовленных с его применением ЭАП.
Иной вывод следует из данных табл. 4. Видно, что введение в клей пьезокерамического
наполнителя ЦТБС-3, физико-механические и электрофизические характеристики которого
близки к аналогичным характеристикам материала ЦТСтБС-2, обеспечило наименьший разброс
значений электрофизических характеристик Fp, FpA, A, C, tgδ в партии ЭАП.
384
Инженерное обеспечение гидрофизики и гидроакустики
Усредненные значения изменения электрофизических характеристик (в процентах)
Таблица 4
Наполнитель
Fр
Fар
Uр
Uар
Fap-Fp
Up/Uap
C
tgδ
FрA
А
ТБ
ТБК-3
ЦТБС-3
ЦТС-19
3,42
3,60
2,23
5,0
3,45
3,88
2,47
2,30
43,4
65,2
52,3
40,4
31,5
31,3
15,9
49,5
15,6
19,6
16,6
28,4
52
78,8
66,4
60,8
3,75
3,06
2,00
14,4
43,2
38,9
36,5
41,7
3,63
3,07
2,47
3,97
22,1
35,0
21,9
34,2
Заключение. Для повышения качества ЭАП следует вводить в состав клея
пьезокерамический наполнитель идентичный материалу ПКЭ. Оптимальная масса наполнителя
может быть найдена сравнением электрофизических характеристик ЭАП, изготовленных с
применением клея, содержащего пьезокерамический наполнитель различной массы.
Литература
1. Подводные электроакустические преобразователи: справочник / Под ред. чл.-кор. АН СССР
В. В. Богородского. Л.: Судостроение, 1983. 248 с.
2. Материалы пьезокерамические. Технические условия. ОСТ II 0444-87. М.: 1987. 141 с.
3. Функциональные наполнители для пластмасс / Под ред. М. Ксаноса / Пер. с англ., под ред.
В. Н. Кулезнева. СПб.: Научные основы и технологии, 2010. 576 с.
4. Липатов Ю. С. Физическая химия наполненных полимеров. М.: Химия, 1977. 304 с.
5. Баранец И. В., Ваганов Г. В., Гайдукова Л. В., Краснов А. В., Легуша Ф. Ф., Никитин Г. А.,
Пугачев С. И., Рытов Е. Ю. Исследование влияния наполнителей на структуру и физико-механические
характеристики эпоксидного клея ДМ-5-65 // МИТ. № 4(46). 2019. Т. 1. С. 172−177.
6. Грег С., Синг К. Адсорбция, удельная поверхность, пористость. М.: Мир, 1984. 306 с.
7. Zenkiewicz M. Methods for the calculation of surface free energy of solids / J. Achiev in Mater. and
Manufact. Eng. 2007. Vol. 24, № 1. Р. 137−145.
8. Ваганов Г. В., Галиханов М. Ф., Гороховатский Ю. А., Мочалова Б. Н., Темнов Д. Н. Физические
свойства сетчатых полимеров на основе эпоксидных смол. СПб.: Изд-во «Форапринт», 2015. 92 с.
9. Полимерные композиционные материалы: структура, свойства, технология: уч. пособие / Под
ред. А. А. Берлина. СПб.: Профессия, 2008. 557 с.
10. Ветров А. С., Краснов А. В., Легуша Ф. Ф., Пугачев С. И., Рытов Е. Ю., Чижёв С. А.
Исследование влияния наполнителей эпоксидного клея ДМ-5-65 на электрофизические характеристики
составного электроакустического преобразователя // МИТ. Т. 1, № 4(46). С. 178-181.
11. Пьезокерамические преобразователи / Под ред. С. И. Пугачева. Л.: Судостроение, 1984. 256 с.
12. Писаренко Г. Г., Хаустов В. К. Влияние циклического напряжения на физико-механические
свойства пьезокерамики / Препринт. Киев: Наукова думка, 1987. 43 с.
385
Инженерное обеспечение гидрофизики и гидроакустики
ФИЗИКО-ХИМИЧЕСКИЕ И ТЕХНИЧЕСКИЕ ОСНОВАНИЯ ВЫБОРА
ПЬЕЗОКЕРАМИЧЕСКОГО НАПОЛНИТЕЛЯ КЛЕЯ ДМ-5-65
А. В. Краснов, Г. А. Никитин, С. И. Пугачев, д-р техн. наук, С. А. Чижев
АО «Концерн «Морское подводное оружие – Гидроприбор», Санкт-Петербург, Россия
PHYSIKO-CHEMICAL AND TECHNICAL REASONS
TO CHOOSE THE PIEZOCERAMIC FILLER OF THE EPOXY DM-5-65
A. V. Krasnov, G. A. Nikitin, S. I. Pugachev, Dr.Sc., S. A. Chizhev
JSC «Concern «Sea Underwater Weapon – Gidropribor», St. Petersburg, Russia
Обоснован выбор состава и массы неорганического наполнителя системы цирконата-титаната свинца
(ЦТС), вводимого в эпоксидный наполненный клей, предназначенный для соединения активных и пассивных
элементов составного стержневого электроакустического преобразователя.
The paper justifies the composition and weight of the inorganic filler of the lead zirconate-titanate (PZT) system
to be added to the epoxy DM-5-65 used to glue active and passive elements of com-posite rod transducers.
Введение. Из рекомендаций работы [1] следует, что качество сборки составного ЭАП
можно повысить, если приблизить физико-химическую природу пьезокерамического
наполнителя клея ДМ-5-65 к физико-химической природе, используемой в качестве материала
активных элементов ЭАП пьезокерамики. Поэтому целью настоящей работы явился анализ
влияния пьезокерамических наполнителей ЦТБС-3 и ЦТСтБС-2 на структуру и
эксплуатационные характеристики клея, содержащего эти наполнители.
Влияние пьезокерамических наполнителей на физические и химические свойства
клея. Краевые углы смачивания каплей клея серебряного покрытия на поверхности
пьезокерамики составили соответственно 37°±3° и 54°±4°, а смачивания дистиллированной
водой — 84,4°±3,4° и 93,7°±6,3°.
Значения свободной энергии поверхности субстрата и адгезива, содержащего
пьезокерамические наполнители системы цирконата-титаната свинца, представлены в табл. 1.
Свободная энергия поверхности применяемых материалов (мН/м)
Таблица 1
Материал
Полная энергия
Дисперсионная
составляющая
Полярная
составляющая
Серебро на керамике
Сталь 12Х18Н10Т
Клей ДМ-5-65 (ЦТСтБС-2)
Клей ДМ-5-65 (ЦТБС-3)
138,3±9,3
1437,9±94,9
23,5±4,1
124,4±23,3
45,1±4,2
805,9±61,2
0,9±0,9
123,2±22,0
93,2±4,6
632,0±33,8
22,5±3,1
1,3±1,3
Приведенные данные показывают, что природа взаимодействий на поверхности
пьезокерамики, покрытой слоем серебра, является преимущественно полярной. В то же время на
поверхности стали 12Х18Н10Т практически сбалансированы дисперсионные и полярные
взаимодействия.
Из табл. 1 следует также, что свободная энергия поверхности отвержденного на стали клея
ДМ-5-65, содержащего наполнитель ЦТСтБС-2, характеризуется преимущественно полярной
составляющей, а клея, содержащего наполнитель ЦТБС-3, — преимущественно дисперсионной.
Согласно данным [2], дисперсионные взаимодействия особенно существенны при
взаимодействии частиц дисперсной фазы через прослойки дисперсионной среды. В то же время,
полярные взаимодействия, обусловленные присутствием постоянных диполей, действуют между
ближайшими соседями и в отличие от дисперсионных взаимодействий не суммируются на
больших расстояниях в объеме фаз. При этом удельная свободная энергия в случае образования
в системе упорядоченных блоков, как правило, мала [2].
386
Хорошее смачивание обеспечивается либо близостью физико-химической природы
адгезива и субстрата, либо низкой поверхностной энергией адгезива. Облегчение смачивания
«полярного» серебряного покрытия на керамической основе клеем ДМ-5-65, содержащим
пьезокерамический наполнитель ЦТСтБС-2, по сравнению с тем же клеем, содержащим
пьезокерамический наполнитель ЦТБС-3, обусловлено, вероятно, и полярным характером
взаимодействий клея ДМ-5-65 с наполнителем ЦТСтБС-2, и низкой величиной поверхностного
натяжения, численно равного свободной энергии поверхности.
Измерения показали также, что плотность клея, содержащего наполнитель ЦТБС-3,
(2,438±0,042) г/см3, выше плотности клея, содержащего наполнитель ЦТСтБС-2. Его плотность
равна (2,277±0,093) г/см3.
Механические и термомеханическая характеристики отвержденного клея ДМ-5-65
представлены в табл. 2. Видно, что клей с пьезокерамическим наполнителем ЦТСтБС-2 прочнее
клея с пьезокерамическим наполнителем ЦТБС-3, и имеет более высокую температуру
стеклования.
Физико-механические характеристики клея ДМ-5-65 с наполнителями системы ЦТС
Таблица 2
Наполнитель
Модуль
упругости, ГПа
Напряжение при
разрыве, МПа
Удлинение при
разрыве, %
Температура
стеклования, °С
ЦТСтБС-2
ЦТБС-3
5278±136
5150±360
50,67±4,43
47,96±4,44
1,31±0,24
1,91±0,46
+83,5
+82,0
Анализ клея ДМ-5-65 с различным по массе пьезокерамическим наполнителем
ЦТСтБС-2. В процессе экспериментов определены: угол смачивания неотвержденным клеем
посеребренной поверхности пьезокерамики, механическая прочность на разрыв адгезионных
соединений клей — металл, величины полной свободной энергии поверхности (СЭП)
отвержденного клея при 20°С и после нагрева при +65°С в течение 48 часов («свидетелей»).
Представлена динамика изменения полярной и дисперсионной составляющих СЭП в
зависимости от массы наполнителя ЦТСтБС-2 в клее.
Количественные значения перечисленных характеристик приведены в табл. 3 и 4.
Таблица 3
Механическая прочность на разрыв адгезионных соединений клей-металл (кг/см2)
Весовые части
№1
№2
№3
№4
№5
Среднее значение
60
80
100
120
494
641
659
561
374
604
672
563
497
600
643
531
561
595
616
596
540
590
619
570
522
606
642
564
Краевой угол смачивания (θ) и свободная энергия поверхности отвержденного клея
Весовые
части
60
80
100
120
Таблица 4
θ, град.
СЭП
полная,
мН/м
СЭП
полярная,
мН/м
СЭП
дисперсионная,
мН/м
СЭП
полная
(свидетели),
мН/м
СЭП
дисперсионная
(свидетели), мН/м
94,4
94,4
102,4
99,6
42,0
38,4
38,7
43,0
20,5:
15,6
14,3
2,0
21,4
22,9
24,3
41,7
43,0
36,4
31,8
35,3
16,9
20,3
18,5
27,3
387
При изготовлении ЭАП первоначально в клей вводили пьезокерамический наполнитель
ЦТБС-3 в количестве 100 в. ч.; столько же по массе содержал заменяемый пьезокерамический
наполнитель ТБ.
Следующим шагом явилось изготовление ЭАП с применением клея, содержащего
пьезокерамический наполнитель ЦТСтБС-2 также в количестве 100 в. ч.
Установлено, что собранные по такой технологии составные ЭАП характеризуются
повышенными значениями основных электрофизических характеристик.
В последующих экспериментах испытали ЭАП, содержащие наполнитель ЦТСтБС-2 в
количествах 60, 80, 100 и 120 в. ч.
Установлено, что оптимальной является масса наполнителя, равная 80 в. ч. Так, по
добротности, Q, при использовании пьезокерамического наполнителя ЦТСтБС-2 различной
массы получен следующий ряд ее значений: Q60 = 106,5; Q80 = 138,6; Q100 = 111,3; Q120 = 80,8.
Заключение. Процесс изготовления составного ЭАП посредством склеивания активных и
пассивных элементов оптимизирован введением в клей пьезокерамического наполнителя,
материал которого аналогичен материалу пьезокерамических элементов, входящих в составной
ЭАП.
Дальнейшая оптимизация процесса достигнута определением оптимальной массы
вводимого в клей пьезокерамического наполнителя системы цирконата-титната свинца.
Новизна реализованных при выполнении представленной работы технических решений
подтверждена патентом на полезную модель [4] и двумя патентами на изобретения [5, 6].
Литература
1. Ветров А. С., Краснов А. В., Легуша Ф. Ф., Пугачев С. И., Рытов Е. Ю., Чижёв С. А.
Исследование влияния наполнителей эпоксидного клея ДМ-5-65 на электрофизические характеристики
составного электроакустического преобразователя // МИТ. 2019. Т. 1, № 4(65). С. 178−181.
2. Баранец И. В., Ваганов Г. В., Гайдукова Л. В., Краснов А. В., Легуша Ф. Ф., Никитин Г. А.,
Пугачев С. И., Рытов Е. Ю. Исследование влияния наполнителей системы ЦТС на структуру и физикомеханические характеристики эпоксидного клея ДМ-5-65 // МИТ. 2021. № 1, часть 2. С. 108−113.
3. Щукин Е. Д., Перцов А. В., Амелина Е. А. Коллоидная химия. М.: Высшая школа, 2004. 434 с.
4. Патент РФ № 208885 Составной электроакустический преобразователь. Зявл. 06.07.2021: опубл.
18.01.2022. Бюл. № 2 / Ветров А. С., Краснов А. В., Легуша Ф. Ф., Никитин Г. А., Пугачев С. И.,
Рытов Е. Ю.
5. Патент РФ № 2768297. Составной электроакустический преобразователь. Заявл. 06.07.2021:
опубл. 23.03.2022. Бюл. № 9 / Ветров А. С., Краснов А. В., Легуша Ф. Ф., Никитин Г. А., Пугачев С. И.,
Рытов Е. Ю.
6. Патент РФ № 2793894 Составной электроакустический преобразователь. Заявл. 22 08 2022,
опубл. 07.04.2023. Бюл. № 10 / Ветров А. С., Краснов А. В., Легуша Ф. Ф., Никитин Г. А., Паничев Г. И.,
Пугачев С. И., Рытов Е. Ю., Чижёв С. А.
388
Инженерное обеспечение гидрофизики и гидроакустики
АЭРОМОБИЛЬНОЕ СКАНИРОВАНИЕ ИСТЕЧЕНИЙ УГЛЕВОДОРОДОВ
В АТМОСФЕРУ ИНФРАКРАСНЫМИ АНАЛИЗАТОРАМИ И АЭРОЗОЛЬНЫМИ
ОПТРОНАМИ
А. О. Александров, В. И. Алексеев, канд. физ.-мат. наук, А. В. Загнитькo, канд. хим. наук, И. Д. Мацуков,
В. В. Пименов, С. Е. Сальников, Д. Ю. Федин
НИЦ «Курчатовский институт», Москва, Россия
AEROMOBILE SCANNING OF HYDROCARBON OUTFLOWS INTO
THE ATMOSPHERE WITH INFRARED ANALYZERS AND AEROSOL
OPTOCOUPLERS
A. O. Alexandrov, V. I. Alekseev, Ph.D., A. V. Zagnitko, Ph.D., I. D. Matsukov, V. V. Pimenov, S. E. Salnikov,
D. Y. Fedin
NRC «Kurchatov Institute», Moscow, Russia
Разработана методика и созданы аэромобильные инфракрасные анализаторы и аэрозольные оптроны с
длиной волны излучения от 0.6 до 4 мкм на базе БПЛА для анализа газокапельных истечений углеводородов
в атмосферу. Показано, что при масштабных, техногенных выбросах затопленных струй и/или разливах
на воду сжиженного природного газа массой до 5×103 кг в развивающихся углеводородных облаках
возникают локальные и флуктуирующие во времени и по объему смеси воздуха и алканов с воспламеняемой
концентрацией. Проведен анализ двухфазных потоков капель и паров при различны режимах барботажа
воды алканами, гелием и воздухом в процессе моделирования техногенных аварий на море вследствие
нарушения герметичности емкостей с топливом.
A technique has been developed and aeromobile infrared analyzers and aerosol optocouplers with a radiation
wavelength from 0.6 to 4 microns based on UAVs have been created for the analysis of gas-droplet outflows of
hydrocarbons into the atmosphere. It is shown that with large-scale, man-made emissions of flooded jets and/or
spills of liquefied natural gas weighing up to 5×103 kg, local and fluctuating mixtures of air and alkanes with a
flammable concentration occur in developing hydrocarbon clouds. The analysis of two-phase flows of droplets
and vapors under different modes of bubbling water with alkanes, helium and air in the process of modeling manmade accidents at sea due to leakage of fuel tanks.
При эксплуатации морских объектов добычи и транспортировки топливных
углеводородов необходима оценка последствий их техногенных выбросов в атмосферу в виде
струй и/или разливов на воду с потенциальным образованием взрывопожароопасных облаков
топливо-воздушных смесей (ТВС) из капель и паров [1−5]. Данные по их эволюции при
аварийных выбросах углеводородов на морских объектах топливно-энергетического комплекса
(ТЭК) ограничены, а их анализ достаточно сложен, так как необходимо быстро детектировать
флуктуирующие концентрации капель и паров над поверхностью воды, в том числе при
пониженной температуре в случае истечений СПГ (сжиженный природный газ) [1–8].
В результате разработка экспресс-методов и аппаратуры для анализа газокапельных истечений
углеводородов с поверхности воды имеет научное и практическое значение для систем контроля
промышленной безопасности морских объектов ТЭК.
Целью работы являлось разработка аэромобильного комплекса сканирования
аэрозольными оптронами и инфракрасными (ИК) анализаторами облаков ТВС при масштабных
выбросах СПГ в атмосферу и/или его разливах на воду, а также в процессе ее барботирования
алканами.
На рис. 1 приведена принципиальная схема и фотография запатентованного
аэромобильного комплекса для сканирования содержания аэрозолей и паров ТВС на базе БПЛА
(беспилотный летальный аппарат), включающего ИК-газоанализатор 1 и аэрозольный оптрон 2
с передачей данных на карту памяти и/или по радиоканалу на удаленный сервер [6–8]. При этом
используются два типа ИК-анализаторов с рабочей температурой Т ≈240–330 и 150–330 К с
подогревом криогенных смесей в электропечи до 280–300 К. Мониторинг паров алканов в ИКанализаторах осуществляется путем их конвективной аспирации в зоны анализа сенсоров Mipex
через НЕРА фильтры для защиты от воздействия дисперсной фазы [6–8]. Аэрозольный оптрон 2
предназначен для измерения оптической плотности D = lg(I/I0) ≈ 0,01–4 облаков ТВС и
поверхностной концентрации капель S = π<d2>n = 1–300 м2/м3, где I0 и I — интенсивность
389
Инженерное обеспечение гидрофизики и гидроакустики
излучения до и после анализируемого объема облака ТВС, <d2>0,5 — среднеквадратичный
диаметр полидисперсных капель cо счетной n концентрацией, D=SL/9,2; L=0,1–0,3 м —
оптическая длина зоны анализа в аэрозольных оптронах [1, 6–8].
Локальные облака ТВС моделировались на газовом стенде [7–8]. В полевых условиях
масштабные струйные выбросы СПГ массой до 5×103 кг и длиной более 100 м в атмосфере
создавались распылением с их аэродинамическим дроблением и кипением криогенных капель с
формированием облаков ТВС объемом до 106 м3 за время менее 30 с [7–8].
В процессе импульсного разлива из емкостей хранения СПГ массой до 5×103 кг на воду
скорость его испарения в режиме пленочного, переходного и пузырькового кипения
определялась теплообменом между СПГ и водой, а также между СПГ и атмосферой [5]. Время
его разлива составляло менее 15 с, а испарения — не превышало 150 с (рис. 2). При барботаже
воды в разных режимах использовались метан, СПГ, гелий и воздух со скоростью их истечения
через воду от 0,01 до 300 м/с.
При разливах СПГ массой до 5000 кг на водную поверхность в бассейне площадью более
200 м2 в развивающемся над ней облаке пары регазифицированного СПГ были ненасыщенными
и неоднородно распределенными по объему (рис. 2). По мере возрастания их концентрации
температура в центре облака понижалась до 170 К. При этом наблюдались флуктуирующие
масштабные зоны с содержанием паров, превышающим их нижний объемный
концентрационный предел воспламенения С≈5 % об. для СПГ и метана [3]. Образования
масштабных смесей этана, пропана и бутана, существенно отличающихся от их состава в СПГ,
не наблюдалось, что согласуется с теорией [2].
Рис. 1. Принципиальная схема и фотография аэромобильного комплекса анализа паров и капель ТВС
1 — ИК-анализатор; 2 — аэрозольный оптрон; 3 — фотография аэромобильного ИК-анализатора при Т=240–330 К
Рис. 2. Фотография холодного, стелящегося над землей облака аэрозолей
и паров СПГ и воды через 15 с после его разлива на воду в бассейне
390
Инженерное обеспечение гидрофизики и гидроакустики
В лабораторных условиях и при масштабных выбросах СПГ в виде струй и разливах на
воду наблюдалось его частичное диспергирование с образованием полидисперсных криогенных
капель. Рассчитано время t их испарения с d = 10–5000 мкм в воздухе и в атмосфере метана при
Т=150–293 К на основе модели конвекционного обмена энергией и массой между каплей и
паровоздушной средой [6−8]. Показано, что величина t пропорциональна d2 и для капель с d<103
мкм время t <4 с как в атмосферном воздухе, так и в облаке паров 100 % об. метана с давлением
105 Па и Т = 293 К.
При барботаже воды метаном, гелием, воздухом и регазифицированным промышленным
СПГ наблюдалось существенное развитие ее межфазной поверхности. В зависимости от
скорости их истечения развивался пузырьковый, пенный, струйный или фонтанирующий
режимы с образованием двухфазных выбросов в атмосферу. Плотность D= 0,01–4 и поверхность
S=1–300 м2/м3 существенно зависели от чисел Rе и We, а также от высоты Н над поверхностью
воды в следствии кавитации и аэродинамического распада струй, седиментации, рассеивания и
турбулентной коагуляции с испарением капель. Измерены распределения капель воды по
размерам и содержание углеводородов. Рассчитано время испарения капель воды и керосина
ТС-1 согласно теории диффузионного испарения Максвелла-Ленгмюра [1−5].
Установленные закономерности коррелируют с данными экспериментов «Falcon» и
«Burro» по истечению СПГ в атмосферу и на воду [4, 5].
Исследованы газокапельные выбросы СПГ и алканов с образованием над водой
масштабных облаков ТВС объемом до 106 м3 с оптической плотностью D<4. Разработаны
методика и аппаратура их аэромобильного сканирования и анализа содержания капель воды и
паров углеводородов при разливе СПГ на воду и ее барботировании алканами.
Разработанный комплекс диагностики облаков ТВС может быть использован в системах
контроля промышленной безопасности объектов ТЭК при освоении углеводородных ресурсов
океана, а также в системах экологического мониторинга атмосферы и анализа эволюции
газокапельных облаков углеводородов.
Литература
1. Зуев В. Е., Кабанов М. В. Оптика атмосферного аэрозоля. Л.: Гидрометеоиздат, 1987. 255 с.
2. Стебновский С. В. Импульсное диспергирование как предельный объем разрушения жидкого
объема // Физика горения и взрыва. 2008. Т. 44, № 2. С. 117–128.
3. ГОСТ Р 51330.19-99 (МЭК 60079-20-96). Данные по горючим газам и парам, относящиеся к
эксплуатации электрооборудования. Часть 20.
4. Brown T. C., Cederwall R. T., Chan S. T. at el. Falcon Series Data Report. 1987 LNG Vapor Barrier
Verification Field // Lawrence Livermore National Lab. 1990. 665 р.
5. Сафонов В. С. Анализ особенностей растекания и испарения СПГ на водной поверхности при
аварийных нарушениях герметичности грузовых емкостей танкеров // НТС «Вести газовой науки.
Повышение надежности и безопасности объектов газовой промышленности». М.: Газпром ВНИИГАЗ,
2018. № 2(34). С. 166–190.
6. Загнитько А. В., Зарецкий Н. П., Меньшиков Л. И. и др. О применимости закона БугераЛамберта-Бера для оценки коэффициента поглощения лучей света в облаке диспергированной жидкости
// Оптика атмосферы и океана. 2022. Т. 35, № 11. С. 944.
7. Загнитько А. В., Пименов В. В., Сальников С. Е. и др. Быстродействующий двухканальный
анализатор оптически плотных выбросов аэрозолей на основе диодных оптопар с длиной волны 0,65 и 3,4
микрона // Техническая физика. 2023. Т. 93, Вып. 2. С. 207–213. DOI: 10.21883/JTF.2023.02.54494.236.
8. Загнитько А. В., Зарецкий Н. П., Мацуков И. Д. и др. Низкотемпературные трехканальные
газоанализаторы в оптическом мониторинге пожароопасных истечений сжиженного природного газа //
Физическая химия. 2023. Т. 97, № 1. С. 183–188.
Работа выполнена в НИЦ КИ по теме «Разработка физико-технических основ методов измерения
параметров аэрозольных и парогазовых облаков, возникающих при крупномасштабных авариях на
объектах ТЭК, для создания экспериментальных образцов систем диагностики аэрозольных облаков»
согласно приказу № 83 от 20.01.2023.
391
Инженерное обеспечение гидрофизики и гидроакустики
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ УСТРОЙСТВ СОГЛАСОВАНИЯ
И КОМПЕНСАЦИИ БУКСИРУЕМЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧАТЕЛЕЙ
Д. Е. Драчев, Н. А. Корельский, М. А. Шабанов
АО «Концерн «Океанприбор», Санкт-Петербург, Россия
DESIGN FEATURES OF MATCHING AND COMPENSATION DEVICES
FOR TOWED HYDROACOUSTIC EMISSIONERS
D. E. Drachev, N. A. Korelskiy, M. A. Shabanov
JSC «Concern «Oceanpribor», St. Petersburg, Russia
В данной работе рассмотрены задачи компенсации емкостной проводимости гидроакустических
излучателей и согласования с выходом усилителей мощности. Подтверждена целесообразность
уменьшения реактивной составляющей выходного тока бортовых генераторных устройств при
возбуждении буксируемых излучателей большой мощности для минимизации потерь энергии в
грузонесущем кабеле. Приведены результаты моделирования нагрузочных характеристик излучателей в
полосе частот эквивалентной схемой замещения.
This paper examines the problems of capacitive conductivity compensation of hydroacoustic emitters and
matching with the output of power amplifiers. The feasibility of reducing the reactive components of the output
current of on-board generator devices when exciting towed high-power emitters to minimize energy losses in the
load-carrying cable has been confirmed. The results of modeling the load characteristics of emitters in the
frequency band using equivalent circuit are presented.
Введение. Задача разработки устройств согласования и компенсации (УСК) бортовой
передающей аппаратуры, обеспечивающей возбуждение гидроакустических излучающих
антенн, является принципиально значимой на всех этапах развития гидроакустических
комплексов, использующих активные режимы работы.
При использовании в качестве передающих устройств линейных усилителей мощности
применение параллельной индуктивной компенсации емкостной составляющей нагрузки
позволило кратно снизить потери энергии и мощность потребления передающих трактов режима
гидролокации. Впоследствии, с переходом к тиристорным генераторам преобладающее значение
получила последовательная индуктивная компенсация в сочетании с узкополосной фильтрацией
выходного сигнала на активно-емкостной нагрузке.
Существенный прогресс в развитии гидроакустических передающих устройств связан с
внедрением широкополосных ключевых усилителей мощности (КУМ) с широтно-импульсной
модуляцией, определенных в соответствии с принятой классификацией как усилители класса D
[1]. Отличительной особенностью принципа действия таких устройств является
высокоэффективная рекуперация энергии из реактивной составляющей нагрузки в цепи
электропитания. Таким образом, отпала необходимость применения дополнительных элементов
индуктивной компенсации для уменьшения потерь энергии при обеспечении расширения
частотного диапазона до 1−2 октав.
Однако реализация такого преимущества возможна только при размещении излучающих
антенн в непосредственной близости от передающей аппаратуры, например, в модульной части
носителя, при весьма малом сопротивлении соединительной линии. Для возбуждения
буксируемых излучателей большой мощности, соединенных с носителем протяженным
грузонесущим кабелем (длиной до 1000 м) при существенном погонном сопротивлении
токонесущих жил (порядка 8−15 Ом/км) ситуация осложняется значительными потерями в
линии передачи сигнала. При этом задача компенсации реактивной составляющей нагрузки в
непосредственной близости с буксируемым излучателем приобретает особую актуальность.
Далее рассмотрим проблемные вопросы проектирования УСК в составе буксируемого
носителя с обоснованием необходимости индуктивной компенсации и автотрансформаторного
согласования. Тут следует сказать, что автотрансформатор применяется для ограничения
рабочего напряжения кабеля и для обеспечения требуемого уровня возбуждения
преобразователя.
392
Инженерное обеспечение гидрофизики и гидроакустики
КУМ
КУМ
УСК
ФНЧ
ФНЧ
КУМ
НЧИ
УСК
КУМ
НЧИ
ФНЧ
НЧИ
УСК
ФНЧ
УСК
НЧИ
а
б
Рис. 1. Функциональные схемы вариантов компенсации
а — последовательный; б — параллельный
Особенности проектирования. Оценка характеристик передающей аппаратуры, прежде
всего, связана с особенностями нагрузочных характеристик гидроакустических излучателей.
В таком случае сочетание большой мощности и низкой частоты широкополосных сигналов
приводит к существенным габаритам электромагнитных элементов в УСК, определяющим
массогабаритные показатели бортовой и забортной частей передающего тракта. При этом
следует учитывать требования показателей качества широкополосных сигналов, связанные,
прежде всего с равномерностью амплитудно-частотной характеристикой (АЧХ) и линейным
изменением фазо-частотной характеристики (ФЧХ) напряжения на нагрузке. Последнее
обстоятельство определяет выбор схемотехнической реализации УСК емкостной составляющей
нагрузки. Функциональные схемы последовательного и параллельного вариантов компенсации
представлены на рис. 1.
Следует отметить, что подчеркивание дополнительных гармонических составляющих в
пределах одной октавы снижается путем применения последовательной компенсации,
обеспечивающей резонансное выделение низкочастотного сигнала на нагрузке и кратное
подавление дополнительных составляющих в верхнем частотном диапазоне. Вместе с тем,
значительно искажается равномерность изменения АЧХ и ФЧХ сигнала возбуждения НЧИ.
В случае параллельной компенсации в полосе рабочих частот достигается практически
постоянство характеристик, что соответствует наиболее полной корреляции излучаемого
сложного сигнала с его образом на входе усилителя. В этом аспекте очевидны недостатки
последовательной компенсации, где наблюдаются резкие изменения амплитуды и фазы, что
практически ухудшает структуру излучаемого сигнала.
Основываясь на опыте проведенных исследований по различным тематикам [2], в данной
работе рассмотрен вариант параллельной компенсации. Такой вариант обеспечивает
постоянство АЧХ и ФЧХ напряжения на нагрузке, что является приоритетным, а также позволяет
реализовать требуемое согласование с нагрузкой при использовании его как
автотрансформатора. Данные преимущества в полной мере подтверждают обоснованность
внедрения параллельной схемы УСК.
Рис. 2. Эквивалентная схема замещения
393
Инженерное обеспечение гидрофизики и гидроакустики
а
б
в
Рис. 3. Результаты импеданса нагрузки без компенсации (Z, Zequ) и с компенсацией (Zcomp) (а),
коэффициента активной мощности без компенсации (cos, cosequ) и
с компенсацией (coscomp) (б) и выходной мощности генераторного устройства (Pgn) (в)
Результаты работы. В качестве примера рассматривается доработка гидроакустического
излучателя. Основываясь на данных, полученных в ходе экспериментальных исследований
макета, были определены параметры эквивалентной схемы замещения нагрузки, которая
показана на рис. 2.
Результаты сравнения полученных измерений импеданса нагрузки и коэффициента
активной мощности по сравнению с исходными значениями представлены на рис. 3.
По полученным результатам видно, что в диапазоне частот 1−3 от нормированной частоты
происходит увеличение импеданса нагрузки практически в 3 раза при изменении коэффициента
активной мощности от (0,36−0,68) до (0,7−1,0). По оценкам энергетических характеристик
определена необходимая индуктивность дросселя компенсации Lк = 7 мГн.
В качестве материала магнитопровода была выбрана качественная электротехническая
сталь 3425В с возможностью реализации запаса по индукции в 2 раза. Сопоставление
зависимостей Z и Zcomp подтверждает целесообразность использования параллельной
индуктивной компенсации. Анализ полученных данных подтверждает возможность
существенного повышения коэффициента активной мощности и индуктивной компенсации
емкостной составляющей нагрузки в заданной полосе частот.
Литература
1. Артым А. Д. Усилители класса D и ключевые генераторы в радиосвязи и радиовещании. М.:
Связь, 1980. 209 с.
2. Александров В. А., Казаков Ю. В., Маркова Л. В. Исследование потерь энергии в усилителях
мощности различных классов при работе на гидроакустический излучатель // Гидроакустика. 2022.
№ 50 (2). С. 32−41.
394
Инженерное обеспечение гидрофизики и гидроакустики
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ АКУСТОТЕРМОЭЛЕКТРИЧЕСКОГО
ПРИЁМНИКА ЗВУКА
Ф. Ф. Легуша1, д-р физ.-мат. наук, Н. Н. Семёнов1, канд. техн. наук, М. М. Олейник1,
К. В. Разрезова2, канд. физ.-мат. наук
1
Санкт-Петербургский государственный морской технический университет, Россия
2
ООО «Звукоизоляционные Европейские Технологии», Санкт-Петербург, Россия
EXPERIMENTAL STUDIES OF AN ACOUSTO-THERMO-ELECTRIC SOUND
RECEIVER
F. F. Legusha1, Dr.Sc., N. N. Semyonov1, Ph.D., M. M. Oleynik1, K. V. Razrezova2, Ph.D.
1
Saint Petersburg State Marine Technical University, St. Petersburg, Russia
2
LLC «Soundproof European Technology», St. Petersburg, Russia
В работе представлены результаты натурных испытаний акустотермоэлектрических приёмников,
подтверждающих работоспособность данного типа преобразователей акустических сигналов. Впервые
экспериментально подтверждена возможность реализации обратного термоакустического эффекта.
Это позволяет утверждать, что термофоны являются обратимыми электроакустическими
системами. Приёмники этого типа являются безинерционными широкополосными приёмниками
акустических сигналов, работающими в диапазоне от 1,0 до 200 кГц. Малая масса и габариты таких
приёмников позволяют применять их для обеспечения работы автономных систем различного
назначения.
The paper presents the results of full-scale tests of acousto-thermo-electric receivers, confirming the performance
of this type of acoustic signal converters. For the first time, the possibility of realizing the inverse thermoacoustic
effect has been experimentally confirmed. This suggests that thermophones are reversible electroacoustic systems.
Receivers of this type are inertia-free broadband receivers of acoustic signals operating in the range from 1,0 to
200 kHz. The low weight and dimensions of such receivers make it possible to use them to ensure the operation of
autonomous systems for various purposes.
Теоретическое обоснование возможности применения плёночных термофонов в качестве
приёмников было доказано в статьях [1, 2]. В таких устройствах акустотермоэлектрическое
преобразование сигнала происходит при сохранении структуры термофона и системы его
электрического питания. Разработана упрощённая методика расчёта основных параметров
акустотермоэлектрических приёмников звука — термомикрофонов.
Термомикрофоны реализованы на базе электротермических излучателей звуковых волн —
термофонов. Плёночные термофоны являются широкополосными нерезонансными источниками
звука, работающими в диапазоне частот от 1,0 до 200 кГц. Термофоны являются идеальными
поршневыми источниками звука. Описание конструктивных особенностей, методы расчёта
параметров, а также результаты испытаний современных плёночных термофонов можно найти в
работах [3, 4].
В порядке развития работ [1, 2] нами проведены экспериментальные исследования
возможности использования термофонов в качестве широкополосных приёмников акустических
сигналов. Предварительные результаты исследований представлены в этом докладе. Опираясь
на эти результаты, можно утверждать, что акустотермоэлектрический эффект технически
реализуем. На базе этого эффекта можно создавать широкополосные приёмники звука,
работающие в диапазоне частот от 1,0 до 150 кГц.
Структурная схема преобразователя звука. Рассмотрим структурную схему слоистой
системы, которая используется для обеспечения процесса преобразования звуковой волны в
электрический сигнал. Изображение схемы показано на рис. 1. Акустотермоэлектрический
преобразователь (термомикрофон) состоит из двух слоёв: 2 — активный элемент (АЭ)
устройства; 3 — несущая пластина.
395
Инженерное обеспечение гидрофизики и гидроакустики
1
2
x
T′
T12′
θ
I0
k T1
0
k T2
d
d1
3
y
k
1
Рис. 1. Структурная схема слоистой структуры термомикрофона
1 — воздух; 2 — активный элемент; 3 — несущая пластина; I0 — постоянный ток смачивания;
d — толщина АЭ; d1 — толщина несущей пластины; T1′, T12′ — акустические добавки к температуре
среды в падающей и отражённой волнах
Рис. 2. Схема подключения активного элемента
Процесс преобразования акустического поля, взаимодействующего с верхней поверхности
АЭ, происходит в веществе, из которого изготовлен электропроводящий слой. В данной работе
рассмотрены АЭ из тонких слоев меди или серебра.
В преобразователях сигналов АЭ формировались непосредственно на поверхностях
несущих пластин — 3. Несущая Пластина 3 обеспечивает механическую прочность системы, а
также отвод стационарных тепловых потоков, возникающих в АЭ устройства при протекании по
нему опорного постоянного электрического тока I0. Для изготовления пластин использовались:
алюминий, стеклопластик FR4 и стекло.
На поверхности несущей пластины (длина 90 мм; ширина 62 мм, толщина d1 = 1,5 мм)
формировался АЭ и схема его электрического питания (рис. 2).
Первый вариант АЭ: на площадке 50×50 мм расположены тонкие проводники, ширина
электропроводящего медного слоя а = 100 мкм, толщина d = 9,0 мкм, зазор между проводниками
100 мкм. Электрическое сопротивление АЭ по постоянному току Rе1 = 50,0 Ом.
Второй вариант АЭ: на площадке 50×50 мм на подложку из стекла нанесен слой серебра
толщиной не более 0,1 мкм, на краях наклеены электроды для подключения сигналов.
Электрическое сопротивление 0,2 Ом.
Принципиальная электрическая схема подключения термофона в режиме микрофона
приведена на рис. 2, внешний вид на рис. 3.
К разъему J1 подключен источник постоянного тока, обеспечивающий протекание «тока
смачивания», индуктивности L1 и L2 обеспечивают изоляцию источника тока от переменного
сигнала, возникающего в термомикрофоне, конденсаторы C1 и C2 отсеивают постоянную
составляющую сигнала, и на разъеме J2 оказывается принятый сигнал в виде переменного
напряжения.
396
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 3 Вид сверху термомикрофона с АЭ из медных проводников
Рис. 4. АЧХ термомикрофонов
1 — АЭ из тонкой пленки на стеклянной подложке; 2 — АЭ из медных проводников на FR-4;
3 — АЭ из медных проводников на алюминиевой подложке
Для исследования параметров термомикрофонов использовался ГОСТ 16123-88 с
дополнением — не существует измерительных микрофонов на диапазон 1…200 кГц, поэтому
использовалось измерение в нескольких частотных диапазонах несколькими микрофонами
последовательно.
Параметры измерения: «ток смачивания» равен 100 мА, амплитуда напряжения
переменного сигнала 5 В. Результаты измерения АЧХ приведены на рис. 4.
Самую низкую чувствительность имеет термомикрофон на алюминиевой подложке,
особенно на низких частотах. Скорее всего, это связано с хорошей теплопроводностью
подложки. Максимальная чувствительность у термомикрофона из тонкой серебряной пленки на
стеклянном основании. Ширина полосы частот, на которой может работать термомикрофон, у
всех рассмотренных термомикрофонов составляет 1...100 кГц, при этом частотная
характеристика ровная и без выраженных резонансов.
Анализ результатов измерений. Эффект преобразования акустических волн в тепловые
и электрические подтвержден натурным экспериментом. Как и предсказывалось, термофон
имеет обратимый принцип действия, полученный приемник акустических колебаний имеет
широкую равномерную частотную характеристику, что позволяет использовать данные
термомикрофоны в различных областях науки и техники, таких как измерительные приемники,
приемники ультразвуковых колебаний, измерители шума и так далее. Из рассмотренных
конструкций термомикрофонов наибольшую чувствительность имеет термомикрофон из тонкой
серебряной пленки толщиной менее 0,1 мкм на стеклянной основе. Меньшую чувствительность
у термомикрофонов из медных проводников можно объяснить меньшей эффективной площадью
покрытия термофона активным элементом – между проводниками есть зазоры.
397
Инженерное обеспечение гидрофизики и гидроакустики
Литература
1. Легуша Ф. Ф., Невеселова К. В. Широкополосные источники звука – термофоны. СПб.: МИТ,
2014. Т. 1, № 3(25). С. 71−77.
2. Васильев Б. П., Легуша Ф. Ф., Разрезова К. В., Экспериментальные исследования плёночных
термофонов. СПб.: МИТ, 2016. Т. 1, № 4(34). С. 118-123.
3. Легуша Ф. Ф., Васильев Б. П., Олейник М. М., Разрезова К. В. Электротермические приемники
звука // Письма в ЖТФ. 2023. Т. 49, вып. 9. С. 40–42.
4. Легуша Ф. Ф., Васильев Б. П., Лукьянов В. Д., Олейник М. М., Разрезова К. В. Исследование
возможности использования конструктивных особенностей пленочного термофона для создания
приемника акустических сигналов // Труды СПбГМТУ. 2023. Вып. 2(6). С. 108–125.
398
Инженерное обеспечение гидрофизики и гидроакустики
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПЛЁНОЧНЫХ
ЭЛЕКТРОТЕРМОАКУСТИЧЕСКИХ ИСТОЧНИКОВ ЗВУКА НОВОГО ТИПА
Ф. Ф. Легуша1, д-р физ.-мат. наук, Н. Н. Семёнов1, канд. техн. наук, М. М. Олейник1,
К. В. Разрезова2, канд. физ.-мат. наук
1
Санкт-Петербургский государственный морской технический университет, Россия
2
ООО «Звукоизоляционные Европейские Технологии», Санкт-Петербург, Россия
EXPERIMENTAL STUDIES OF FILM ELECTRO-THERMO-ACOUSTIC
SOUND SOURCES OF A NEW TYPE
F. F. Legusha1, Dr.Sc., N. N. Semyonov1, Ph.D., M. M. Oleynik1, K. V. Razrezova2, Ph.D.
1
Saint Petersburg State Marine Technical University, St. Petersburg, Russia
2
LLC «Soundproof European Technology», St. Petersburg, Russia
Плёночные электротермические излучатели акустических волн — термофоны — относятся к классу
поршневых безынерционных широкополосных источников звука, работающих в диапазоне от 1,0 до
200 кГц. В докладе исследуются термофоны, для которых при формировании активных элементов
впервые применён стандартный метод изготовления печатных плат, широко используемый в
радиоэлектронике. Такой метод формирования активных элементов термофонов открывает широкие
возможности для создания лёгких, малогабаритных источников звука, которые найдут применение при
решении различных задач науки и техники
Film electrothermal emitters of acoustic waves — thermophones — belong to the class of piston-type inertia-free
broadband sound sources operating in the range from 1,0 to 200 kHz. The report examines thermophones, for
which the standard method of manufacturing printed circuit boards, widely used in radio electronics, is used for
the first time in the formation of active elements. This method of forming the active elements of thermophones
opens up wide opportunities for creating lightweight, small-sized sound sources that will find application in
solving various problems in science and technology.
Электротермические излучатели акустических волн — термофоны — применяются в
качестве источников звука более 100 лет. Термофоны в классическом виде достигли пика своего
развития в 40-е годы прошлого века, когда их применяли в качестве образцовых источников
звука [1]. Практический интерес к термофонам возродился в конце прошлого века после
изобретения плёночных термофонов [2]. Эти термофоны относятся к классу поршневых
безинерционных широкополосных источников звука. Малые масса и габариты, высокая
механическая прочность таких термофонов открывают широкие возможности для создания
источников звука.
Теоретические и экспериментальные исследования параметров плёночных термофонов в
СПбГМТУ начались в 2009 году. С результатами этих исследований можно ознакомиться в
работах [3-5]. Для проведения измерений изготавливались термофоны, активные элементы (АЭ)
которых формировались на поверхностях несущих пластин методом напыления металлов. В
докладе впервые представлены результаты экспериментальных исследований плёночных
термофонов, элементы которых созданы с использованием технологии изготовления печатных
плат.
Структурная схема термофона. Плёночный термофон представляет собой систему
связанных между собой слоёв (рис. 1).
На активном элементе 1 происходит процесс преобразования электрических токов в
акустический сигнал. Подложка 2 термофона формируется на верхней поверхности несущей
пластины 3 тогда, когда она изготавливается из металла. Подложка изготавливается из вещества,
имеющего хорошие электроизоляционные свойства и служит для создания термического
сопротивления между веществом АЭ и поверхностью пластины 3.
399
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 1. Структурная схема плёночного термофона
1 — активный элемент; 2 — подложка; 3 — несущая пластина; 4 — электрические контакты
Рис. 2. Фотография платы, на которой сформирован термофон
Несущая пластина 3 обеспечивает: механическую прочность устройства; термическое
сопротивление на поверхности контакта между веществом АЭ с поверхностью пластины;
теплоотвод статического тепловыделения.
Параметры моделей термофонов. Для проведения натурных испытаний были
разработаны и изготовлены модели плёночных термофонов. Общий вид термофонов показан на
рис. 2. АЭ термофонов формировались на поверхности алюминиевых пластин толщиной 1,5 мм,
длиной 90 мм и шириной 62 мм. В правой части изображения (рис. 2) видна структура АЭ,
состоящего из плотно проложенных змейкой тонких медных проводников, которые при
протекании переменного электрического тока нагреваются, создают переменное тепловое поле,
которое преобразуется в воздухе в переменное поле давления и акустический звук. Ширина
проводника АЭ 100 мкм, толщина 9,0 мкм, зазор между соседними проводниками 100 мкм,
материал медь, сопротивление АЭ по постоянному току Re = 50,0 Ом.
В левой части рис. 2 показаны разъемы для подключения АЭ термофона. Разъём J1
используется для подключения к АЭ источника тока смачивания I0. Разъём J2 — для
подключения генератора электрического сигнала i(t). В ходе испытаний реализуется режимы
возбуждения: 1) — токи I0 ≠ 0, Im ≠ 0; 2) —токи I0 = 0, Im ≠ 0, где Im — амплитуда переменного
тока.
Работа плёночного термофона. При любом режиме возбуждения в формировании
акустического сигнала участвует переменный ток i(t), в результате протекания которого в объёме
вещества АЭ возникает температурное поле T(t). Следствием взаимодействия поля T(t) со средой,
находящейся над поверхностью АЭ, является возбуждение в ней тепловой волны,
распространение которой в воздухе сопровождается излучением акустической волны.
Теоретическое описание цепочки физических процессов, происходящих в термофоне,
сделано в работе [5]. Показано, что в любом режиме возбуждения ряд параметров термофона
связаны друг с другом линейно: pam — амплитуда мощности переменного тепловыделения;
Tm′ — амплитуда тепловой волны; um — амплитуды колебательной скорости генерируемой
волны. Это позволяет написать:
′
pae1 Tm1
um1 4 I 0 ⋅ I m 4 I 0
,
= = =
=
′
pae2 Tm2
um2
I m2
Im
где 1 и 2 — номера режимов возбуждении термофона.
400
(1)
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 3. АЧХ плёночного термофона, работающего в 1 и 2 режимах возбуждения
Уравнение (1) позволяет сравнить акустическую эффективность термофона, работающего
в 1 и 2 режимах возбуждения. Если предположить, что Im = I0, то имеем um1 = 4um2 или
ΔL12 = L1 – L2 = 12 дБ, где L1, L2 — уровни звука, создаваемые термофоном в 1 и 2 режимах
возбуждения. Протекание по АЭ термофона тока смачивания I0 приводит к усилению
акустического сигнала.
Измерения АЧХ термофонов. Процедура измерения амплитудно-частотных
характеристик (АЧХ) термофонов соответствует ГОСТ 30457-97. Отличие заключается в том,
что измерительный микрофон размещался на расстоянии 350 мм, а не на 500 мм, как это требует
ГОСТ.
Результаты измерений АЧХ термофона показаны на рис. 3. При этом были реализованы
следующие режимы возбуждения: 1) I0 = 100 мА; Im = 100 мА (кривая 1); 2) Im = 100 мА
(кривая 2).
Анализ результатов измерений. Согласно выражению (1), уровни сигналов термофона в
1 режиме возбуждения должны превышать на ΔL12 =12 дБ уровни сигналов 2 режима. Из рис. 3
нетрудно заметить, что в диапазоне частот от 100 Гц до 200 кГц выполняется неравенство
∆L12 < ∆L12e = ∆L1e − ∆L2e , где ΔL1e, ΔL2e — уровни сигналов 1 и 2 режимов возбуждения
соответственно.
Из рис. 3 видно, что в диапазоне частот от 100 Гц до 200 кГц акустические сигналы,
создаваемые термофоном, надёжно регистрируются измерительным микрофоном. При этом на
всех частотах выполняется неравенство ΔL1e > ΔL2e, где ΔL1e, ΔL2e — экспериментальные уровни
сигналов 1 и 2 режимов возбуждения. Повышенная акустическая активность 1 режима
возбуждения обеспечивается током смачивания I0.
Литература
1. Беранек Л. Акустические измерения. М.: ИЛ, 1952. 539 с.
2. Shinoda H., Nakajima T., Ueno K., Koshida N. Thermally induced ultrasonic emission from porous
silicon // Nature. London. 1999. Vol. 400. P. 853−855.
3. Невеселова К. В. Расчёт амплитуды переменной температуры активного элемента термофона. //
СПб.: МИТ, 2014. Т. 1, № 4(26). С. 110−115.
4. Легуша Ф. Ф., Невеселова К. В. Экспериментальные исследования современных термофонов. //
СПб.: МИТ, 2015. Т. 1, № 4 (30). С. 60−65.
5. Легуша Ф. Ф., Семёнов Н. Н., Олейник М. М., Разрезова К. В., Чемоданов М. Н. Исследование
режимов возбуждения акустотермических плёночных источников звука // Тр. НТК «Неделя Науки
СПбГМТУ». 2023. С. 81−102.
401
Инженерное обеспечение гидрофизики и гидроакустики
ЧИСЛЕННЫЙ АНАЛИЗ ХАРАКТЕРИСТИК КОЛЕБАНИЙ ТРУБОПРОВОДА
В ЗАВИСИМОСТИ ОТ СТЕПЕНИ ЕГО ИЗГИБА
О. П. Ткаченко, д-р физ.-мат. наук
Вычислительный центр Дальневосточного отделения РАН, Хабаровск, Россия
NUMERICAL ANALYSIS OF THE PIPELINE VIBRATIONS CHARACTERISTICS
DEPENDING ON THE DEGREE OF ITS BENDING
O. P. Tkachenko, Dr.Sc.
Computing Center of the Far Eastern Branch of the RAS, Khabarovsk, Russia
Выполнен асимптотический и численный анализ математической модели, описывающей колебания
стенки металлической изогнутой трубы с пульсирующим потоком жидкости. Математическая модель
построена на основе теории упругих оболочек В. З. Власова, что позволяет исследовать дополнительные
характеристики колебаний по сравнению со стержневыми моделями. Создан алгоритм преобразования
математической модели к упрощенной постановке начально-краевой задачи. Показана высокая
точность и адекватность предложенных моделей и методов исследования.
An asymptotic and numerical analysis of a mathematical model describing the vibrations of the wall of a metal
curved pipe with a pulsating fluid flow was performed. The mathematical model is based on the theory of elastic
shells by V.Z. Vlasov, which makes it possible to study additional vibration characteristics compared to rod
models. An algorithm has been created for converting the mathematical model to a simplified formulation
of the initial-boundary value problem. The high accuracy and adequacy of the proposed models and research
methods are demonstrated.
Математическая модель колебаний изогнутого подводного трубопровода, основанная на
теории оболочек В. З. Власова, построена в работе [1]. Математические модели для
исследования напряженно-деформированного состояния слабоизогнутого трубопровода в
различных приближениях теории оболочек предложены в [2, 3]. Математическая модель
деформирования L-образного стыка труб разработана в [4].
В условиях излома профиля трубопровода напряженно-деформированное состояние
стенки трубы в его проекции на плоскость приобретает характер задачи теории упругости в
L-образной области. Современные методы решения подобных задач разрабатываются в работах
[5−7]. Для применения этих методов к исследованию задач распространения колебаний в трубах
с относительно сильным изгибом необходимо ослабить требования на малость кривизны
профиля в статье [1].
Условиям этого обобщения задачи посвящена данная работа.
Алгоритм редукции. В статьях [1, 8] разработан алгоритм редукции уравнений модели к
начально-краевой задаче меньшей размерности, чем исходные уравнения. В [8] изучены
уравнения колебаний трубы с потоком жидкости в нулевом приближении. Там же изложена
геометрия физической системы.
Моделируется трубопровод, осевой линией которого является плоская кривая с кривизной
κ 0 ( s ) . Определяющим параметром является число
ε = R0 max κ 0 ,
(1)
где R0 — радиус трубы. Уравнения математической модели, выведенные в рамках теории
полубезмоментных оболочек, есть в открытом доступе сети Интернет в [9]. Алгоритм редукции
уравнений модели, применимый при ε 1 , разработан в [1, 8, 9]. Там же введены
криволинейные координаты ( Osθ R ) , декартова система отсчета ( Oxyz ) и обозначения для
скорости и давления в жидкости, перемещения стенки трубы. Повторно эти обозначения здесь
не вводятся.
В условиях гидравлического удара уравнения колебаний в безразмерных компонентах
имеют вид:
402
Инженерное обеспечение гидрофизики и гидроакустики
ρf
∂v ' a 2 ∂p '
∂vs '
∂v ' a 2 ∂p '
a2
∂p '
=
=
0, r +
0,
+
=
0, θ +
∂τ α r ∂θ
∂τ
α ∂r
∂τ 1 + ε rf sin θ ∂ζ
a2
∂v ' v '
∂p '
−1 ∂vs '
−1 ∂vθ '
+ (1 + ε rf sin θ )
+ (α r )
+ r + r +
∂τ
∂ζ
∂θ α∂r α r
+
(2)
ε f (ζ )
0;
( v 'cos θ + vr 'sin θ ) =
α (1 + ε rf sin θ ) θ
vr R = R =
0
∂w '
.
∂τ
Здесь обозначено (см. также [9]): vs ' = vs c f , vθ ' = vθ c f , vr ' = vr c f
— безразмерные
скорости жидкости, нормированные на скорость звука; ζ = s , r = R R0 , τ = t
ω —
безразмерные координаты и время; w ' = w R0 — радиальное перемещение стенки трубы;
f (ζ ) =
κ 0 (ζ )
max κ 0
— функция кривизны; α = R0 1 , — характерная длина волны.
Для устранения размерностей вдоль угловой и радиальной координат к уравнениям (2)
необходимо применить преобразования, предложенные в [1, 8]:
p0 + ε p1 sin θ + ε p2 cos θ + O ( ε 2 ) .
v' =
v 0 + ε v1 sin θ + ε v 2 cos θ + O ( ε 2 ) ; p ' =
(3)
Численный анализ получающихся при этом уравнений изложен в [9].
Метод редукции в первом приближении. Допустим, параметр ε имеет характерную
величину порядка 0,25−0,5. Тогда метод редукции необходимо уточнить. Пусть выполнено
приближение
1± ε
2
2
≈1.
(4)
Подставляя (3) в уравнения (2) и применяя (4), получим
∂vs 0
∂v
∂p
ε 2 2 ∂p1
;
a fr
+ v0 s 0 + a 2 0 =
2
∂τ
∂ζ
∂ζ
∂ζ
∂p
∂p ∂v
∂w0 ε 2 ∂vs1 ε 2 f
−
a 2 0 + v0 0 + s 0 + 2 =
fr
( vθ 2 + vr1 ) .
∂ζ ∂ζ
∂τ
∂ζ
2
2α
∂τ
Вычислим правые части в приближении v0 = 0 и с учетом (4). Пренебрегая малыми
величинами ε 2α 2 , ε 2 a 2 по сравнению с единицей, получим:
∂w
∂I + ∂I +
∂w
+
+2 0 =
−ε 2 f 1 ;
∂τ ∂ζ
∂τ
∂τ
∂w
∂I − ∂I −
∂w
−
−2 0 =
ε2 f 1.
∂τ ∂ζ
∂τ
∂τ
2
vs 0 − a 2 p0 — инварианты Римана.
vs 0 + a p0 , I=
Здесь обозначено, аналогично [8]: I=
−
+
403
(5)
Инженерное обеспечение гидрофизики и гидроакустики
Рис. 1. Зависимость давления от времени в малой окрестности клапана
Таким образом, математическая модель распространения колебаний в слабоизогнутом
трубопроводе, построенная и исследованная в [8, 9], дополнена уравнениями (5), позволяющими
описать более сильный изгиб.
Верификация модели. В статье [9] рассмотрены примеры с малым параметром порядка
0,05. В работе [10] исследовано распространение колебаний в трубе с коленом. Ниже выполнено
сравнение численных результатов, полученных по расширенной уравнениями (5)
математической модели, предложенной в [8, 9], с результатами работы [10] для верификации
модели.
Данные физической системы: два прямолинейных участка металлической цилиндрической
трубы длиной L1 = 12, 27 м, L2 = 35, 71 м, R0 = 13 мм, h = 1, 27 мм, =
ρt 8940 кг м3 ,
998 кг м3 . Эти величины
E = 117 ГПа, ν = 0,34 заполнены жидкостью плотностью ρ=
f0
соответствуют потоку воды в медной трубе. Участки трубы соединены под прямым углом
стандартными фитингами с радиусом изгиба ρ 0 = 20, 6 мм. Начальная скорость потока
жидкости v0 f = 1,1 м/с. При этих параметрах ε ≈ 0, 6 . Опыт заключался в том, что поток
жидкости отсекался от насоса быстродействующим клапаном, и замерялось давление возле
клапана. Разностный метод численного решения задачи изложен в [9].
Результаты численного анализа приведены на рис. 1. Пунктирной фиолетовой линией
изображены оцифрованные экспериментальные значения давления из [10], сплошной зеленой
линией — результаты расчетов давления по предложенной нами модели. Как видно на графиках,
эти данные расположены близко друг к другу.
Выполнен статистический анализ близости результатов. Математическое ожидание
относительного отклонения расчетного давления от его экспериментального значения из [10]
найдено по значениям в 330 точках по времени и составляет MP = 0,152 . Среднеквадратичное
отклонение составило σ p = 0, 077 .
Заключение. Предложена обобщенная математическая модель распространения
колебаний в изогнутых трубах на основе теории оболочек В. З. Власова. Эта модель
распространена на случай сильного изгиба трубы. Результаты вычислительных экспериментов
показали высокую точность разработанной математической модели и метода ее анализа.
404
Инженерное обеспечение гидрофизики и гидроакустики
Литература
1. Рукавишников В. А., Ткаченко О. П. Численное и асимптотическое решение уравнений
распространения гидроупругих колебаний в изогнутом трубопроводе // Прикладная механика и
техническая физика. 2000. Т. 41, № 6. С. 161−169. DOI: 10.1023/A:1026619009228.
2. Rukavishnikov V. A., Tkachenko O. P. Dynamics of a fluid-filled curvilinear pipeline // Appl. Math.
Mech. (Engl. Ed.). 2018. Vol. 39, № 6. P. 905−922. DOI: 10.1007/s10483-018-2338-9.
3. Rukavishnikov V. A., Tkachenko O. P. Approximate resolving equations of mathematical model of a
curved thin-walled cylinder // Appl. Math. Comput. 2022. Vol. 422. P. 126961. DOI: 10.1016/j.amc.2022.126961.
4. Rukavishnikov V. A., Tkachenko O. P. Mathematical model of the pipeline with angular joint of elements
// Math. Methods Appl. Sci. 2020. Vol. 43(13). P. 7550−7568. DOI: 10.1002/mma.5751.
5. Rukavishnikov V. A., Rukavishnikova E. I. Weighted finite element method and body of optimal
parameters for elasticity problem with singularity // Comput. Math. with Appl. 2023. Vol. 151. P. 408−417.
6. Rukavishnikov V. A., Rukavishnikov A. V. New numerical method for the rotation form of the oseen
problem with corner singularity // Symmetry. 2019. Vol. 11, № 1. P. 54. DOI: 10.3390/sym11010054.
7. Rukavishnikov V.A. Body of optimal parameters in the weighted finite element method for the crack
problem // J. Appl. Comput. Mech. 2021. Vol. 7, № 4. P. 2159−2170. DOI: 10.22055/JACM.2021.38041.3142.
8. Tkachenko O. P., Ryabokon A. S. Asymptotic analysis of the equations of hydroelastic oscillations in
thin-walled elastic pipeline // Mater. Phys. Mech. 2021. Vol. 47, № 5. P. 747−766. DOI: 10.18149/
MPM.4752021_9.
9. Рукавишников В. А., Ткаченко О. П. Численный анализ математической модели гидроупругих
колебаний в изогнутом трубопроводе // Математическое моделирование. 2011. Т. 23, № 1. С. 51−64.
10. Wiggert D. C., Otwell R. S., Hatfield F. J. The Effect of Elbow Restraint of Pressure Transients // J.
Fluids Eng. 1985. Vol. 107. P. 402−406.
405
Инженерное обеспечение гидрофизики и гидроакустики
СОЗДАНИЕ ИЗЛУЧАТЕЛЕЙ, ПРИЕМНИКОВ И РЕТРАНСЛЯТОРОВ ЗВУКА
НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ЭЛЕКТРОКИНЕТИЧЕСКИХ ЯВЛЕНИЙ
В. Е. Курочкин, д-р техн. наук, Б. П. Шарфарец, д-р физ.-мат. наук
Институт аналитического приборостроения РАН, Санкт-Петербург, Россия
CREATION OF SOUND EMITTERS, RECEIVERS AND REPEATERS BASED
ON THE USE OF ELECTROKINETIC PHENOMENA
V. E. Kurochkin, Dr.Sc., B. P. Sharfarets, Dr.Sc.
Institute of Analytical Instrumentation, RAS, St. Petersburg, Russia
Показана возможность создания акустических излучателей, приемников и ретрансляторов звука,
основанных на использовании электрокинетических эффектов. Электроосмос вызывает движение
жидкости при подаче электрического поля к торцам заполненной жидкостью пористой структуры
(излучатель), потенциал течения позволяет получать на торцах пористой структуры разность
электрических потенциалов при движении жидкости в ней (приемник). При наличии разности
потенциалов на электродах и самостоятельного движения жидкости реализуется режим
ретранслятора. Приведены уравнения и результаты натурных экспериментов для каждого
преобразования.
The possibility of creating acoustic emitters, receivers and repeaters of sound based on the use of electrokinetic
effects is shown. Electroosmosis causes the movement of a liquid when an electric field is applied to the ends of a
porous structure filled with liquid (radiator), the flow potential allows you to obtain an electric potential difference
at the ends of a porous structure when a liquid moves in it (receiver). In the presence of a potential difference on
the electrodes and the independent movement of the liquid, the repeater mode is implemented. The equations and
the results of field experiments for each transformation are presented.
Введение. Реализация режимов электроосмоса и потенциала течения в пористых
структурах, заполненных жидкостью в целях создания электрокинетических преобразователей
(ЭКП) известна достаточно давно [1, 2]. В работе [3] было предложено прикладывать к
электродам мембраны ЭКП, состоящей из пористой среды, заполненной жидкостью, кроме
переменного электрического напряжения дополнительно еще и постоянное электрическое
напряжение (напряжение накачки). Это позволило значительно повысить э