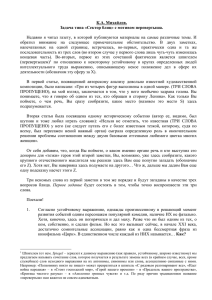
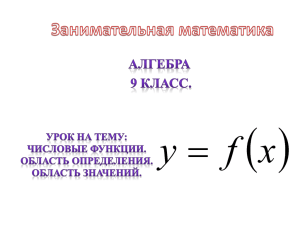
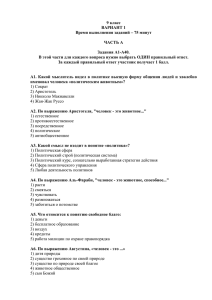
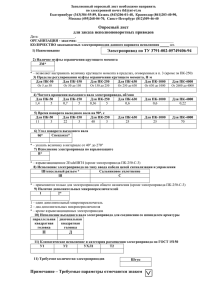
Оглавление ВВЕДЕНИЕ .................................................................................................................. 3 1 АНАЛИЗ ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ В СИСТЕМАХ ЭЛЕКТРОПРИВОДОВ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ .................................................................. 4 1.1 Анализ применения различных типов электродвигателей в системах регулирования производственных процессов........................................................ 4 1.2 Характеристика различных типов систем управления электроприводами переменного тока .................................................................................................... 10 1.3 Анализ основных систем управления и показателей работы электроприводов ..................................................................................................... 12 2 РАСЧЕТ ЭЛЕКТРОПРИВОДА ЛЕНТОЧНОГО КОНВЕЙЕРА ....................... 18 2.1 Выбор электродвигателя ................................................................................. 18 2.2 Кинематический расчет привода ................................................................... 19 2.3 Расчет открытой цепной передачи ................................................................. 20 2.4 Расчет червячной передачи редуктора .......................................................... 22 Межосевое расстояние определяется по выражению: .......................................... 23 2.5 Расчет цилиндрической зубчатой передачи.................................................. 26 Контактная выносливость ...................................................................................... 26 2.6 Проектировочный расчет валов ..................................................................... 30 2.7 Выбор подшипников качения......................................................................... 31 2.8 Расчет основных элементов корпуса редуктора ........................................... 31 2.9 Выбор и расчет шпоночных соединений ...................................................... 32 2.10 Расчет долговечности подшипников качения ........................................... 33 2.11 Расчет валов на прочность ........................................................................... 35 ЗАКЛЮЧЕНИЕ ......................................................................................................... 38 СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ ...................................................... 39 2 ВВЕДЕНИЕ Электрический привод (ЭП) является энергетической основой технологических и производственных процессов, которые реализуются за счет механической энергии. ЭП за последние годы проник практически во все сферы человеческой деятельности и стал неотъемлемой частью большинства технологических установок и во многом определяет их качественный уровень. Приводя в движение исполнительные органы (ИО) рабочих машин и механизмов и управляя этим движением с заданным качеством, ЭП обеспечивает добычу полезных ископаемых, изготовление и обработку различных изделий и материалов, перемещение людей и грузов, и выполнение многих других технологических операций с наилучшими техническими и экономическими показателями. При этом более 60 % вырабатываемой в стране электроэнергии потребляется электрическим приводом. Главенствующее место ЭП среди других возможных видов привода (тепловой, гидравлический, пневматический) определяется рядом преимуществ: наиболее экономичное преобразование электрической энергии; возможность изготовления электродвигателей на самые разнообразные мощности и скорости движения, высокий КПД, надежность в эксплуатации, возможностью создания ЭП для работы в самых разнообразных условиях; разнообразие конструктивного исполнения электродвигателей, возможность с помощью простых средств реализовывать разнообразные виды движения исполнительных органов рабочих машин, а также изменять направление; легкость автоматизации производственных и технологических процессов и многое другое. Возможности использования современных ЭП продолжают постоянно расширяться, в связи с чем исследование, проводимое в рамках данной работы является актуальным. Целью выпускной работы является проектирование электродвигателя конвейерного механизма. 3 1 АНАЛИЗ ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ В СИСТЕМАХ ЭЛЕКТРОПРИВОДОВ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ 1.1 Анализ применения различных типов электродвигателей в системах регулирования производственных процессов. Современные типы оборудования, включающие в себя электропривод, отличаются большим спектром применяемых устройств для управления электродвигателями, начинающимися от простых магнитных пускателей и заканчивающихся сложными системами с применением микропроцессоров и контроллеров, которые позволяют осуществлять сложнейшие программы управления. Кроме того, и сам спектр электродвигателей отличается значительным разнообразием как по мощности (от нескольких десятков ватт до нескольких сотен тысяч киловатт), так и по скорости (от нескольких десятков об/мин до нескольких сотен тысяч об/мин). Такой значительный разброс обуславливается прежде всего широчайшим диапазоном их применения во всех сферах жизни человека., начиная от промышленных областей и сельского хозяйства и заканчивая бытовой сферой жизнедеятельности. Применение электрического привода позволяет существенно упростить и механизировать различные операции. В последнее время предприятия стараются устанавливать такие системы управления электроприводами, которые буду отличаться повышенность эффективностью и рациональным энергопотреблением, что отвечает текущей политике, проводимой государством [1-4]. Именно для этих целей зачастую применяют системы, где осуществляется возвращение электрической энергии в сеть, т.е. процесс рекуперации. К таким системам относятся следующие: - система типа «генератор – двигатель»; - электрический каскад; 4 - электромеханический каскад. Как следствие этого, конструкция ЭП становится безредукторной, что повышает общий КПД привода. Прогресс в области конструирования преобразовательной техники, в частности, для преобразователей частоты стимулирует замену двигателей постоянного тока и синхронных ЭД на более дешевые и надежные асинхронные ЭД с короткозамкнутым ротором. Если рассматривать электродвигательные установки с позиций теории электропривода, то, как объект изучения это электромеханическая система, являющаяся совокупностью механических и электромеханических устройств, объединенных общими силовыми электрическими цепями и (или) цепями управления, предназначенная для осуществления механического движения объекта. В электроприводе в единое целое объединяется три части (рис 1.1.): механическая часть, электрический двигатель и система управления. Рисунок 1.1 – Система управления электроприводом 5 Наряду с обеспечением движения исполнительных органов электропривод одновременно выполняет и разнообразные функции по автоматизации технологических процессов и операций. Круг этих задач очень разнообразен (табл. 1). Большинство автоматизированного последние может быть электропривода, достижения электроники, решено в только котором автоматики, с применением используются самые электромеханики и электромашиностроения [5]. Таблица 1.1 – Данные о применении электрических двигателей в электроприводах Область применения Тип двигателя Регулирование электропривода Центробежные насосы, Трехфазный АД с вентиляторы, мукомольные короткозамкнутым мельницы, агрегатные станки, транспортные устройства Поршневые насосы ротором Не регулируется Синхронный и Трехфазный АД с компрессоры, шаровые короткозамкнутым и мельницы, дробильные фазным ротором Не регулируется Трехфазный АД Не регулируется барабаны Ковочные машины, прессы, молоты, прессы, прокатные станы Прядильные машины, Трехфазный АД с центрифуги, роликовые короткозамкнутым транспортеры Металлорежущие Плавное ротором станки, прессы Трехфазный АД с короткозамкнутым Ступенчатое ротором Краны, дымососы, насосы (требующие регулирования) Трехфазный АД с фазным ротором 6 Плавное Металлорежущие прокатные станы станки, Постоянного тока с независимым Плавное возбуждением Так как основу электрического привода составляют электрические двигатели, то именно электродвигатели определяют уровень электрификации, автоматизации и механизации на любом промышленном предприятии, в строительстве, транспорте, сельском хозяйстве и т.д., потребляя наибольшую часть всей вырабатываемой электрической энергии (рисунок 1.2). В зависимости от используемого электрического двигателя определяют тип электропривода [68]. Рисунок 1.2 – Потребление электроэнергии электромеханическими комплексами Интенсификация технологического прогресса в различных отраслях промышленности связана с усложняющейся технологией производства, с повышением требований к качеству продукции при более сложных процессах технического изготовления, что привело к большому количеству разнообразных систем управления электроприводами [7]. В связи с этим их классифицируют: 7 - по назначению – для поддержания постоянства регулируемой переменной различают системы программного управления и следящие системы. Эта классификация относится к замкнутым системам. Она не включает в себя простейших систем и не учитывает систем, обеспечивающих оптимизацию, самонастройку и комплексную автоматизацию. - по роду аппаратуры – релейно-контакторные, с электромашинными усилителями, с магнитными усилителями, с электронными и полупроводниковыми преобразователями. Это разделение не всегда удобно, т.к. современные системы, имеющие аппаратуру, могут строиться по одинаковым принципам и будут меняться при переходе от одного класса систем к другому. Наиболее целесообразно группировать СУЭП (системы управления электрическим приводом) по тем основным функциям, которые они выполняют в производственном процессе. Требования производства к СУЭП могут быть простыми для отдельных несложных технологических механизмов и довольно сложными для технологических комплексов, выполняющих различные операции при обработке материалов и деталей. Требования производства лежат в основе функций, которые выполняются САУ (системы автоматического регулирования). Простые функции соответствуют простым требованиям, более сложные – более сложным системам и функциям. В данном случае каждый класс системы отличается от других классов структурной схемой, принципами действия, способами построения, а также своими расчетами и типовыми схемами. Кроме основных функций, выделяются дополнительные, каждая из которых вызывает создание лишь дополнительных узлов в СУЭП. Далее приводится описание основных функций, на которые делятся СУЭП. Системы, выполняющие сложные функции, могут выполнять и более простые. Однако необходимо следить, чтобы более простым функциям на практике соответствовали и более простые схемы СУЭП. Взаимодействие приводной машины (привода) и приводимой системы можно представить с помощью характеристик, приведенных на hисунке 1.3 [5], 8 на котором буквой D отмечено семейство характеристик электропривода при разных скоростях вращения, Е- характеристики нагрузки приводимой системы. По оси х откладываются кинетическая энергия, скорость, расход. Интервал характеризует производительность, которую можно обеспечить. По оси у откладывают значения потенциальной энергии, противодействующего момента, высоту напора и т.д., т.е. обычно это значение противодействующей нагрузки, которую приводу необходимо преодолеть. Точки пересечения приводной характеристики (из семейства характеристик D) и характеристики нагрузки (из семейства характеристик Е) — это рабочие точки. Рисунок 1.3 – Характеристика взаимодействия электрического привода в системе управления Производительность привода можно менять либо путем регулирования нагрузки, т.е. за счет механической части, когда при уменьшении производительности с х1 до х2 приводимая система переходит из точки А в точку В, что приводит к возрастанию противодействующего момента и, следовательно, к увеличению потребляемой мощности и энергии, либо путем 9 регулирования скорости электропривода, т.е. применением регулируемого электропривода, когда при уменьшении нагрузки с х1 до х2 система переходит из точки А в точку С, что снижает противодействующий момент и, следовательно, уменьшает потребляемые мощность и энергию по сравнению с регулированием нагрузкой. Ясно, что использование регулируемого привода, в частности электропривода, в сочетании с системами технологической автоматики позволяет более гибко, плавно, динамично и, главное, энергетически экономнее воздействовать на производственный процесс [9], поэтому в настоящее время преобладает и постоянно расширяется тенденция передачи управления технологическим процессом от механической части системе автоматизированного регулируемого электропривода, что позволяет обеспечить наилучшие показатели качества производственного процесса и обеспечить значительное снижение энергопотребления и других ресурсов. Рассмотрим эту тенденцию на примерах, которые далее будут расширены и дополнены конкретными технико-экономическими показателями, подтверждающими обоснованность внедрения регулируемых электроприводов для управления многими производственными механизмами/ 1.2 Характеристика различных типов систем управления электроприводами переменного тока В настоящее время основным типом регулируемого электропривода, является частотно-регулируемый асинхронный электропривод – система «полупроводниковый преобразователь частоты-асинхронный двигатель» (ПЧАД). Однако наряду с этим электроприводом в некоторых случаях для решения отдельных производственных задач и энергосбережения находит применение система «тиристорный преобразователь напряжения асинхронный двигатель» (ТПН-АД), обеспечивающая регулирование напряжения, подводимого к статору. 10 В эксплуатации также находятся электроприводы на основе асинхронных двигателей с фазным ротором, регулируемые за счет изменения добавочных сопротивлении в роторных цепях, так называемые системы реостатного регулирования — «устройство реостатного регулирования – асинхронный двигатель с фазным ротором» (УРР-АДФР). Особенно много таких электроприводов входит в состав подъемно-транспортных механизмов. Для количественной оценки выигрыша в энергопотреблении при замене, например, электропривода с фазным ротором системой ПЧ-АД (полупроводниковый преобразователь частоты – асинхронный двигатель) необходимо располагать энергетическими показателями всех систем регулируемых асинхронных электроприводов: УРР-АДФР, ТПН-АД, ПЧ-АД. Для оценки энергетической эффективности работы различных типов регулируемых асинхронных электроприводов целесообразно проводить анализ обобщенных энергетических показателей для установившихся и переходных режимов электропривода. Для статических режимов в качестве основных энергетических показателей могут быть использованы коэффициент полезного действия η, являющийся мерой экономичности преобразования электрической энергии в механическую, и коэффициент мощности kм, который является мерой экономичности потребления электроэнергии из сети и используется вместо понятия в цепях с несинусоидальными токами, что характерно для электроприводов, управляемых от вентильных преобразователей [8]. При анализе процессов по основной гармонике без учета высших гармоник можно, как и в традиционном рассмотрении, использовать понятие коэффициента мощности cos φ. Точную картину процессов в асинхронном электроприводе (гармонический состав питающих двигатель токов, оценку энергетических показателей, учет влияния полупроводниковых электроприводов на питающую сеть и др.) можно получить, анализируя совместную работу системы 11 «преобразователь- двигатель» с использованием взаимосвязанного математического описания указанных элементов системы. Особенности моделирования объекта – электродвигателя производственного механизма с обоснованием и описания системы «ПЧасинхронный двигатель» с учетом целесообразности принятого уровня идеализации для обеспечения управляемости систем управления будут рассмотрены далее во втором разделе магистерской работы. 1.3 Анализ основных систем управления и показателей работы электроприводов В настоящее время основным типом регулируемого электропривода, является частотно-регулируемый асинхронный электропривод – система «преобразователь частоты-асинхронный двигатель» (ПЧ-АД). Однако наряду с этим электроприводом в некоторых случаях для решения отдельных производственных задач и энергосбережения находит применение система «тиристорный преобразователь напряжения асинхронный двигатель» (ТПНАД), обеспечивающая регулирование напряжения, подводимого к статору. В эксплуатации также находятся электроприводы на основе асинхронных двигателей с фазным ротором, регулируемые за счет изменения добавочных сопротивлении в роторных цепях, так называемые системы реостатного регулирования — «устройство реостатного регулирования – асинхронный двигатель с фазным ротором» (УРР-АДФР). Особенно много таких электроприводов входит в состав подъемно-транспортных механизмов. Для количественной оценки выигрыша в энергопотреблении при замене, например, электропривода с фазным ротором системой ПЧ-АД (полупроводниковый преобразователь частоты – асинхронный двигатель) необходимо располагать энергетическими показателями всех систем регулируемых асинхронных электроприводов: УРР-АДФР, ТПН-АД, ПЧ-АД. Для оценки энергетической эффективности работы различных типов регулируемых асинхронных электроприводов целесообразно проводить анализ 12 обобщенных энергетических показателей для установившихся и переходных режимов электропривода. Для статических режимов в качестве основных энергетических показателей могут быть использованы коэффициент полезного действия η, являющийся мерой экономичности преобразования электрической энергии в механическую, и коэффициент мощности kм, который является мерой экономичности потребления электроэнергии из сети и используется вместо понятия в цепях с несинусоидальными токами, что характерно для электроприводов, управляемых от вентильных преобразователей [9]. При анализе процессов по основной гармонике без учета высших гармоник можно, как и в традиционном рассмотрении, использовать понятие коэффициента мощности cos φ. Точную картину процессов в асинхронном электроприводе (гармонический состав питающих двигатель токов, оценку энергетических показателей, учет влияния полупроводниковых электроприводов на питающую сеть и др.) можно получить, анализируя совместную работу системы «преобразователь- двигатель» с использованием взаимосвязанного математического описания указанных элементов системы [10]. Особенности моделирования объекта – электродвигателя производственного механизма с обоснованием и описания системы «ПЧасинхронный двигатель» с учетом целесообразности принятого уровня идеализации для обеспечения управляемости систем управления будут рассмотрены далее во втором разделе магистерской работы. Реостатное регулирование может быть использовано только для асинхронных двигателей с фазным ротором, когда в процессе управления изменяется значение добавочного и полного сопротивлений в роторных цепях [2,3]. Реостатное регулирование скорости асинхронного двигателя продолжает находить практическое применение при невысоких требованиях к точности регулирования. Основные особенности 13 этого способа регулирования аналогичны способам регулирования электроприводов постоянного тока [9]. Дополнительные возможности регулирования скорости дает импульсное управление добавочным сопротивлением в цепи ротора двигателя. Кроме того, некоторое практическое регулируемого применение асинхронного находит и специальная система электропривода с управляемой муфтой скольжения [10]. Изменение добавочного сопротивления в роторных цепях осуществляется плавно, так как на стороне выпрямленного тока неуправляемого трехфазного выпрямителя, подключенного к контактным кольцам ротора, включено неизменяемое добавочное сопротивление Rдоб, которое периодически шунтируется силовым полупроводниковым ключом на тиристорах или транзисторах, выполняющим роль широтно-импульсного преобразователя (ШИП) [10]. Частота коммутации ШИП не связана с частотой питающей сети и особенно при применении транзисторов достигает 400...600 Гц. Изменение значения добавочного сопротивления в роторных цепях обеспечивается изменением относительного времени проводящего состояния ключа при неизменной частоте коммутации. Эквивалентное добавочное сопротивление в цепи выпрямленного тока, т.е. изменяется от 0 до R, доб. Потери в стали при регулировании добавочных сопротивлений в роторе, когда к статорным цепям приложено номинальное напряжение сети, изменяются незначительно, поэтому при расчетах можно принимать потери в стали постоянными равными номинальным потерям. Реостатное регулирование скорости осуществляется простыми и дешевыми техническими средствами, однако его недостатком являются значительные потери энергии непосредственно в регулировочном реостате, возрастающие по мере снижения скорости двигателя при данной статической нагрузке [3], поэтому реостатное регулирование скорости используется в основном при пуске электрических двигателей. Тиристорное управление. Наиболее распространенная силовая структура ТИН-АД, схема которой приведена на рисунке 1.4, состоит из шести тиристоров, 14 включенных попарно встречно-параллельно в статорные цепи трехфазного асинхронного двигателя. Такой преобразователь предназначен для регулирования 1-й, или основной, гармоники питающего двигатель напряжения изменением угла открытия тиристоров а в диапазоне от а = φ до а = 180°. В этом случае действующее фазное напряжение первой гармоники изменяется от Uном (где действующее фазное номинальное напряжение питающей сети; φ — угол отставания тока от напряжения при синусоидальном питании) до U1 = 0 [6]. Рисунок 1.4 – Схема структуры управления ТПН-АД Длительное регулирование скорости асинхронного электропривода в системе ТПН-АД при Мс=const практически невозможно, так как с возрастанием скольжения (при снижении скорости) по сравнению с номинальными многократно возрастают потери в статоре и в роторе. В этом случае для обеспечения работы короткозамкнутого асинхронного двигателя без перегрева необходимо увеличение в несколько раз, а иногда и на порядок, номинальной мощности двигателя по сравнению с максимальной мощностью статической нагрузки [9]. С учетом ухудшения теплоотдачи 15 самовентилируемых электроприводов при снижении скорости зависимость будет еще менее благоприятной. Частотный способ регулирования скорости асинхронных двигателей является самым экономичным в сравнении с другими известными способами (рисунок 1.5). Возможность регулирования скорости АД изменением частоты следует из выражения скорости идеального холостого хода [8]. Рисунок 1.5 – Частотный способ регулирования в системах управления производственными механизмами Меняя частоту напряжения обмотки статора, можно получать разные скорости идеального холостого хода. При этом, зависимости скорости линейные. Механические характеристики АД при частотном способе регулирования скорости могут существенно отличаться от естественной характеристики [17]. При постоянной амплитуде напряжения, подводимого к обмотке статора, с уменьшением пусковой и критический моменты двигателя увеличиваются, а жесткость механических характеристик повышается. Однако при неизменном напряжении источника питания с уменьшением частоты резко увеличиваются ток намагничивания и ток статора. Магнитная система двигателя насыщается. В результате существенно увеличиваются электрические и магнитные потери. Для повышения технико-экономических показателей двигателя при изменении частоты необходимо регулировать амплитуду напряжения как функцию от частоты и момента нагрузки. Зависимость напряжения от частоты и момента нагрузки выражает закон частотного управления: 16 U=U ( f, M ). (1.1) В полной мере законы частотного управления вида реализуются в замкнутых системах автоматического управления электроприводами. В разомкнутых системах управления напряжение обычно регулируется в функции от частоты: U=U ( f ). Таким образом, для осуществления частотного способа регулирования скорости АД необходимо иметь преобразователь частоты (ПЧ) с возможностью раздельного изменения амплитуды и частоты выходного напряжения. Преобразователи частоты, предназначенные для частотно-регулируемых асинхронных электроприводов, подразделяются по типу связи с питающей сетью на непосредственные преобразователи частоты и двухзвенные преобразователи частоты (ДПЧ) с промежуточным звеном постоянного или переменного тока. В современных частотно-регулируемых асинхронных электроприводах широко применяются ДПЧ с промежуточным звеном постоянного тока. Основными элементами таких преобразователей являются выпрямитель, фильтр промежуточного звена постоянного тока и автономный инвертор. По типу инвертора, который представляет собой коммутатор на полупроводниковых силовых ключах, ДПЧ подразделяются на два класса: с автономным инвертором напряжения (АИН) и с автономным инвертором тока (АИТ). Анализ данных, приведенных в [9] подтверждает вывод о том, что при неизменной частоте переменного напряжения, питающего статорные цепи, при снижении скорости возрастает скольжение асинхронной машины и, следовательно, потери в электроприводе. Их рост тем значительнее, а КПД тем меньше, чем меньше значение пониженной скорости. Значит, системы реостатного регулирования скорости асинхронного электропривода и систему ТПН-АД нельзя признать на современном этапе целесообразными для регулирования скорости особенно при продолжительном режиме работы из-за низких энергетических показателей электропривода. 17 и существенного снижения КПД 2 РАСЧЕТ ЭЛЕКТРОПРИВОДА ЛЕНТОЧНОГО КОНВЕЙЕРА 2.1 Мощность на Выбор электродвигателя барабане ленточного конвейера определяется по выражению: Ppo Ft V 5 0,25 1,25 кВт где Ft– окружная сила на барабане; V – окружная скорость барабана. Частота вращения барабана ленточного конвейера определяется по выражению: n po 60 1000 V 60 1000 0,25 19,1 об/мин D 3,14 250 где D – диаметр барабана. Крутящий момент на барабане (ведомой звездочке) ленточного конвейера определяется по выражению: T Ft Д 0,25 5000 625 Нм. 2 2 КПД привода ленточного конвейера определяется по выражению: пр (12 )3 ( 0,97 0,7 ) 0,02 0,679 0,92 0,625 где 1 – КПД быстроходной ступени редуктора (цилиндрическая), 1 =0,97; 2 – КПД червячной передачи при одном заходе; 2 =0,7; 3 – КПД цепной открытой передачи; 3 =0,92. Требуемая мощность двигателя Pдв Ppo 1,25 / 0,695 2 кВт. Принимаем к установке асинхронный двигатель типа 4A90L4Y3 номинальной мощностью 2,2 кВт, частотой вращения 1425 об/мин. 18 Диаметр и длина вала составляют d1=24мм, l1=50мм, габариты - Д=208; L=350; Н=243 мм. Кинематический расчет привода 2.2 Передаточное отношение привода (общее) ленточного конвейера определяется по выражению: Uo n дв 1425 / 19,1 74,6 n po Примем передаточное отношение редуктора Up=50; тогда передаточное отношение цепной ленточного конвейера определяется по выражению: U3=U0/Up=74,6/50=1,492 Редуктор двухступенчатый: Up=UбUT; примем передаточное отношение червячной передачи UT = 32; тогда цилиндрическая ступень Uб=Up/UT=50/32=1,5625 Частота вращения валов ленточного конвейера определяется по выражению: - быстроходного: nб=nдв=1425 об/мин; - промежуточного: nП=nБ/UБ=1425/1,5625=912 об/мин; - тихоходного: nT=nБ/Uр=1425/50=28,5 об/мин; - рабочего органа: npo=nT/U3=28,5/1,492=19,1 об/мин. Крутящие моменты на валах ленточного конвейера определяется по выражению: - рабочий орган: Тро=625 Нм - тихоходный вал редуктора: Т Т Т ро / U 33 625 / 1,492 0,92 455 Нм 19 - промежуточный: Т П Т Т /UT 2 455 / 32 0,7 20 Нм - быстроходный: Т Б Т П / U11 20 /1,5625 0,97 13,5 Нм. 2.3 Расчет открытой цепной передачи Коэффициент эксплуатации ленточного конвейера определяется по выражению: К э К д К а К н К р К см К П 1,25 1 1 1,25 1,5 1 2,34 где Кд -динамический коэффициент (для ленточных транспортеров характерна спокойная нагрузка, Кд =1,25); Ка - учитывает влияние межосевого расстояния: Ка =1 при а=(30…50)t; Kн - учет наклона цепи, Kн=1 при наклоне до 60о; Kр -учет способа регулирования — периодическое Kр =1,25; Ксм -способ смазывания - периодическая Ксм=1,5; Кп=1 - работа в одну смену. Число зубьев звездочек ленточного конвейера определяется по выражению: ведущий: Z 1 31 2 U 3 31 2 1,492 28 1,5 1,492 160 0,5% U 42 / 28 1,5; U 1,5 Z 2 Z 1 U 28 1,492 42 120 Шаг цепи при числе рядов m=1, Т1=ТТ=455 Нм T 1K э 455 10 3 2,34 3 t 2,8 2,8 28,38 мм t 31,75 мм Z 1 p m 28 36,5 1 3 где [p] — среднее значение давления в шарнире при n1=28,5 об/мин, [p]=36,5 МПа. Находим для t=31,75 мм; проекция опорной поверхности шарнира А=262 мм2; разрушающая нагрузка Q=88,5 кН; погонный q=3,8 кг/м. 20 Осуществим проверку цепи по следующим критериям: - допускаемая частота вращения [n1]=630 об/мин.>n1=28,5 об/мин; - по давлению в шарнирах: p F t K э 2906 2,34 26 МПа<[p]=36,5 МПа, А 262 где Ft P 1250 2906 H V 0,43 где V Z 1tn1 28 31,75 28,5 0,43 м/с 60 1000 60 1000 Число звеньев цепи Lt ленточного конвейера определяется по выражению: ZE=Z1+Z2=28+42=70; ( Z 2 Z 1 ) / 2 ( 42 28) / 6,28 2,23; а 40t ; аt L t 2 at 0,5Z E a 40 t 2 2 23 2 2 40 0,5 70 115,12 at 40 Принимаем четное Lt=116. Уточняем межосевое расстояние: 2 31,75 ZE ZE t 116 35 a Lt Lt 82 4 2 2 4 Делительные диаметры ленточного 116 35 2 8 2,232 1284 мм; конвейера определяется выражению: d1 t 31,75 283,6 мм; 180 sin 180 / 28 sin Z1 d2 31,75 424,9 мм. sin 180 / 42 Наружные диаметры: при d1=19,05 – диаметр ролика цепи. 180 De1 t ctg 0,7 0,31d 298,1 мм; Z1 180 D e2 31,75 ctg 0,7 0,31 19,05 440 мм; 42 21 по Ширина звездочки ленточного конвейера определяется по выражению: b 0,9 ВН 0,15 0,9 19,05 0,15 17 мм; Радиус зуба ленточного конвейера определяется по выражению: r3 1,7d1 1,7 19,05 32,5 мм; h=0,8d1=15 мм. Силы, действующие на цепь ленточного конвейера, определяется по выражению: - окружная: Ft=2906H; - центробежная: FV qV 2 3,8 0,43 2 0,7 H; - от провисания: F f 9,81Kfqa 9,81 1,5 3,8 1,284 72 Н Kf=1,5 при расположении цепи наклонения до 45 - расчетная на вал: Fb Ft 2 F f 2906 2 72 3050 Н Коэффициент запаса прочности цепи ленточного конвейера определяется по выражению: S Q 88500 24 [S ] 10,1 К д Ft FV F f 1,25 2906 0,7 72 2.4 Расчет червячной передачи редуктора Выбор материалов Ожидаемая скорость скольжения, T2=TT=455 Нм; n1=nn=912 об/мин. V S 0,45 10 3 n1 3 T 2 0,45 10 3 3 455 3,2 м/с<5 м/с, следовательно, для колеса: БрАqЖЗЛ, литье центробежное: Т 200 МПа; в 500 МПа, червяк – сталь40х, закалка ТВЧ, полировка, HRC 45 . Определение допускаемых напряжений: Контактная прочность (заедание) определяется по выражению: Н 300 25V S 300 25 3,2 220 МПа Изгибная прочность колеса 2. Число циклов напряжения: 22 N 2 60n2 t 60 28,5 52256 9 10 6 где t 365 24 К сут К годt * 365 24 0,3 0,4 5 5256 часов; t*=5 – срок службы. Коэффициент учета режима нагрузки определяется по выражению: g 19 0,25 0,4 9 0,75 0,251 Эквивалентное число циклов определяется по выражению: NF2 9 10 6 0,251 2,25 10 6 коэффициент долговечности K FL 2 9 10 6 / N F 2 9 10 6 / 2,25 10 6 0,91 K 0,25 0,08 0,910,25 200 0,08 500 82 МПа. р FL 2 T b б) Расчет межосевого расстояния на контактной прочности. 2 Z2 170 a n 13 T 2 K ; Т2=455 Нм. q Z 2 H q Число зубьев колеса определяется по выражению: Z 2 Z 1 U 1 32 32; q=8 – коэффициент диаметра червяка, задаем: К – коэффициент расчетной нагрузки, К=1,2 – задаем: aW 2 32 170 3 13 455 10 1,2 136,6 мм 8 4 220 Требуемый модуль определяется по выражению: m 2aW 136,6 2 6,8 мм q Z2 8 32 Принимаем: q=8, m=8 мм, Z2=30 Межосевое расстояние определяется по выражению: aW m q Z 2 8(8 30) 152 мм 2 2 U=30; UБ=50/30=1,67 – цилиндрическая пара. в) Геометрические расчеты. Червяк: - делительный диаметр определяется по выражению: d1 mq 8 8 64 мм; 23 - диаметр вершин определяется по выражению: d a1 d1 2 m 64 16 80 мм; - диаметр впадин определяется по выражению: d f 1 64 2,4 8 44,8 мм; - ширина червяка определяется по выражению: b1 11 0,06Z 2 m 11 0.06 30 8 102,4 мм b1 105 мм Колесо: - делительный диаметр определяется по выражению: d2 mZ 2 8 30 240 ; - вершин определяется по выражению: d a2 d 2 m 240 16 256 ; - диаметр впадин определяется по выражению: d f 2 240 2,4 8 220,8 ; - наибольший диаметр определяется по выражению: d am d a2 6m /( Z 1 2 ) 256 6 8 / 3 272 d am2 270 мм; - ширина колеса определяется по выражению: b2 0,75d a1 0,75 80 60 мм. Угол подъема определяется по выражению: arctg Z1 1 arctg 7,125 7730 q 8 Скорость окружная червяка определяется по выражению: V1 d1n1 / 60 1000 3,14 855 64 / 60 1000 2,87 м/с где: n1 1425 /1,666 855 об/мин; - скорость скольжения определяется по выражению: V S V1 / cos 2,87 / cos 7,125 2,9 м/с - КПД определяется по выражению: 0,95 tg 0,95 tg7,125 0,67 tg( g ) tg( 7,125 3,0 ) 24 где: g 2 1,5 3 – угол трения для безоловяной бронзы при V S 3 м/с. Проверка. а) Контактная прочность по условию отсутствия заедания. Коэффициент расчетной нагрузки: K K KV , где: K - учет неравномерного распределения нагрузки; KV – динамический коэффициент. 3 Z K 1 2 1 x ; Q где Q=72 – коэффициент деформации червяка, при: Z1=1 и q=8. По графику нагрузки: х 1 0,25 0,75 0,4 0,55 3 30 K 1 1 0,55 1,03 72 При степени точности –8-ой и V=3 м/с, KV=1,25 К 1,03 1,25 1,29 Контактное напряжение определяется по выражению: 170 Н Z2 q Z 2 / q 13T 2 K 170 455 103 1,293,75 13 192МПа [ ], aW3 30 8 152 3 H T2=T=455 Нм. б) Изгибная прочность закрытой передачи. Напряжения в зубе колеса определяется по выражению: F2 0,6Ft 2 KY F 2 b2 m Число зубьев эквивалентное определяется по выражению: Z V 2 Z 2 / cos 3 30 / cos 7,125 31; по нему находим коэффициент формы зуба: Y F 2 2,4. Силы в зацеплении определяется по выражению: 25 [ H ] 220МПа Окружная на колесе Ft 4 , равная осевой на червяке Fa3 ; Т2=ТТ Ft 4 2T 2 2 455 379Z н Fa3 ; d2 0,24 Крутящий момент на червяке определяется по выражению: T1 T1 /U 455 / 30 0,67 22,6 Нм = ТП: Окружная на червяке Ft 3 , равная осевой на колесе Fa4 Ft 3 2T1 2 22,6 707н Fa4 ; d1 0,064 Радиальная: Fr3 Fr 4 Ft 4 tg 3792 tg20 1380 Н Напряжения: F2 2.5 0,6 3792 1,29 2,4 15 МПа< F 2 82 МПа. 60 8 Расчет цилиндрической зубчатой передачи Выбор твердостей. Для стали 45, термообработка улучшение: HB1=300; BH2=270 - твердости шестерни 1 и колеса 2. Определение допускаемых напряжений. Контактная выносливость Число циклов напряжений определяется по выражению: NE=60nt, t=5256. N E1 60 1425 5256 44,94 10 6 ; N E 2 N E1 / U 44,94 10 6 /1,67 27 10 6 Учет графика нагрузки определяется по выражению: 3 13 0,25 0,43 0,75 0,3 Эквивалентное число циклов определяется по выражению: N HE 3 N E : N HE 1 45 10 6 0,3 13,5 10 6 ; 26 N HE 2 27 10 6 0,3 8,110 6 Базовое число циклов определяется по выражению: N HO 30HB 2,4 N HO 1 30 300 2,4 26,5 10 6 N HE 1 ; N HO 2 30 270 2,4 20,5 10 6 N HE 2 Коэффициенты долговечности определяется по выражению: K HL 6 N HO / N HE ; K HL 1 6 26,5 /13,5 1,12 ; K HL 2 6 20,5 / 8,1 1,17 . Допускаемые напряжения при коэффициенте безопасности SH=1,1: для шестерни определяется по выражению: H 1 2 HB 1 70K HL 1 2 300 70 1 12 682МПа SH 1,1 для пары -меньшее: H 650 H 2 2 270 70 1,17 649МПа 1,1 МПа. Изгибная выносливость. Так как базовое число циклов N FO 4 10 6 , то коэффициент долговечности K FL1 K FL 2 1. Допускаемые напряжения для односторонней работы зубьев при коэффициенте безопасности SF=1,7: F1 1,8HB 1K FL1 1,8 300 1 318 МПа; SF 1,7 F 2 1,8 270,1 286 МПа. 1,7 б) Расчет межосевого расстояния. Из расчета на контактную выносливость при 0 an 430 U 13 T2K H baU 2 H 2 где KU – коэффициент расчетной нагрузки, KH=1,25; U=1,67; T2=TП=22,6 Нм 27 ba – коэффициент ширины в долях межосевого расстояния, задаем ba =0,25, учитывая консольное расположение колеса aW 4301,67 13 22,6 1,25 52,6 мм. 0,25 1,67 2 650 2 Принимаем стандартное межосевое расстояние с учетом компоновочных условий aW=63 мм. Ширина зуба колеса определяется по выражению: b2 0,25 52,6 13,15 b2 12 мм. b1=15 мм. Задаем модуль: m 0,01... 0,02 aW 0,63... 1,26 m 1,25 мм. Наименьший угол наклона определяется по выражению: * 4 4 1,25 arcsin 24,6 b2 12 Уменьшим модуль до m=1, увеличим b2=15 мм; b1=20мм. * arcsin 4 1 15,46 15 Суммарное число зубьев определяется по выражению: Z E Za W cos 2 63 cos15,46 121,4 Z E 121; m 1 Окончательный угол наклона определяется по выражению: Z E m 121 1 16,195 2aW 2 63 Число зубьев определяется по выражению: - шестерни: Z 1 Z E /(1 4 ) 121/(1 1,67) 15,3 Z 1 45 - колеса: Z2=121-45=76; U=76/45=1,688; AU=1,3%. Геометрические расчеты делительных диаметров: d nZ / cos d1 1 45 / cos16,145 46,86 мм; 28 d 2 1 76 / cos16,195 79,14 мм. - вершины: da=d+2m; da1=98,86; da2=81,14. - впадины: df=d-2,5m; df1=44,36 мм; df2=76,64 мм. Проверка. а) контактная выносливость. Коэффициент расчетной нагрузки определяется по выражению: K H K H K HV K H Коэффициент неравномерного распределения нагрузки по ширине венца определяется по выражению: bd b / d1 15 / 47 0,32; НВ 350, консольное колесо K H 1,1. Окружная скорость определяется по выражению: V d1n1 / 60 1000 3,14 47 1425 / 60 1000 3,5 м / с 8-я степень точности; где KV -коэффициент учета динамических нагрузок, KHV=1; K H 1,09 при V до 5м/с и 8-ой степени - коэффициент неравномерного распределения нагрузки среди пар зубьев. K H 1,11,09 1 1,2 Контактные напряжения U=76/45=1,69 H 270 T 2 K H (U 1) 3 270 22600 1,2(1,69 1) 3 476 [ H ] 649 МПа aW 63 bU 2 15 1,69 2 б) Изгибная выносливость. Эквивалентное число зубьев определяется по выражению: ZV Z / cos 3 и коэффициент формы зуба Z V 1 45 / cos 3 16,195 51; Z V 2 76 / cos 3 86; YF1=3,65; YF2=3,61. Коэффициент влияния угла наклона определяется по выражению: Y 1 / 140 1 16,2 / 140 0,88 . Коэффициент расчетной нагрузки определяется по выражению: K F K F K FV K F . 29 Аналогично KH находим: K F 1,28; K FV 1,1; K F 0,92; K F 1,28 1,1 0,92 1,3 . Напряжения в зубьях колеса определяются по выражению: F2 Ft K FY F 2Y bm 571 1,3 3,61 0,88 157МПа p 2 286МПа , 15 1 где силы в зацеплении: - окружная 2T 2 2000 22,6 571 Н; d2 79,14 Ft 2 - радиальная: FZ 2 Ft 2 tg tg20 571 216 Н; cos 0,96 - осевая: Fa2 Ft 2 tg 166 Н; - для шестерни: GF1 F 2Y F1 /Y F 2 157 3,65 / 3,61 159 МПа. 2.6 Проектировочный расчет валов По формуле кручения круглого стержня: d 3 16T , 15... 20 МПа. Быстроходный вал. Крутящий момент определяется по выражению: T1 T П /U 22,6 /1,69 0,97 T1 14 Нм. Диаметр концевой части определяется по выражению: d1 3 16 14000 17 мм. 3,14 15 У двигателя d1=24 мм; принимаем у редуктора 20 мм. под подшипником d=25 мм; 30 Промежуточный вал: - под подшипником: d 3 16 22600 21мм; 3,14 15 диаметр впадин червяка dfl=44,8 мм — принимаем под подшипником d=45 мм; под колесом d=30 мм. Тихоходный вал: - под подшипником концевая d1=45 мм; под колесом d=55 мм. d 3 16 4550002 48,75 d 50 мм; 3,14 20 2.7 Выбор подшипников качения Вал В и Т — ставим на радиальных шарикоподшипникам легкой серии; вал П — на радиально-упорных конических ролико-подшипниках ввиду значительной осевой силы. Результаты в таблице 2.1. Таблица 7.1 - Результаты выбора подшипников качения Показатель Номер d Д Т В С Грузоподъемность: Динамическая С Статическая С0 Параметр осевого нагружения е Коэффициент радиальной Х нагрузок осевой Y 2.8 Б 205 25 52 – 15 – 14000 6950 – – – Вал П 7209 45 85 21 19 16 50000 33000 0,41 0,4 1,45 Расчет основных элементов корпуса редуктора Толщина стенки определяется по выражению: 31 Т 210 50 90 – 20 – 35100 19800 – – – 0,04 a 2 0,04 152 2 8,1 9 мм. Фундаментные болты (на лапах): d1 0,03a 12 0,03 152 12 16,56 М16 Крепление крышки -М12. Ширина фланца крышки- 25 мм. Толщина Н и ширина лапы К определяется по выражению: Н 1,5 16 24 мм; К=3d=48 мм. Бобышки под подшипники: Дб=1,25D+10: Тихоходный вал: Д бТ 1,25 90 10 125 мм. Промежуточный вал: Д бГ 1,25 85 10 120 мм. Быстроходный вал: Д бб 1,25 52 10 75... 80 мм. 2.9 Выбор и расчет шпоночных соединений Шпонки выбираем по диаметру вала (и размеры паза t1t2) Быстроходный вал: d=20 мм: b h 6 6;t1 3,5;t2 2,8 . Длину шпонки назначаем: l (1... 1,2 )d 1,2 20 25 мм. Расчетная длина шпонки определяется по выражению: lp=l-b=25-6=19 мм Ее проверяем на смятие: 2Т 2 10 3 14 см 30МПа см 100 МПа d ( h t1 )l p 20( 6 3,5 ) 19 Промежуточный вал: 32 - колесо ступени Б: d 30 b h 8 7;t1 4;t 2 3,3 Назначаем: l=d=30; lp=30-8=22: см 2000 22,6 23МПа см 100МПа 30( 7 4 ) 22 Тихоходный вал: - концевая часть: d=45 мм. b h 14 9, t1 5,5;t 2 3,8, l l p 60 мм - с плоскими торцами. см 2000 455 96,3 МПа. 45( 9 5,5 ) 60 Под колесом шпонка такая же. 2.10 Расчет долговечности подшипников качения Изучение сил, действующих на валы редуктора. Схема сил представлена выражением: Ft1 571H Ft 2 Fr1 216H Fr 2 ст.Б Fa1 166H Fa2 d 47 1 d 2 79 Ось Х принимается вдоль оси вала.Y Z. Рассматриваем силы, действующие в двух плоскостях: YOX и ZOX. Расчет на долговечность подшипников быстроходного вала. а) Определение реакции в опорах вала Плоскость YOX: EM B RYA l Fr1b 0,5d1Fa1 0 RYA Fr1b 0,5dFa1 216 23 0,5 47 166 l 46 RYB Fr1 RYA ; RYB 23; RYA 193 33 Плоскость ZOX. Схема сил симметрична относительно опор, следовательно: R ZB R ZA Ft1 571 285,5 Н; 2 2 Равнодействующая реакция в опоре: R R 2Y R 2 Z R A 193 2 285,5 2 345 Н; R B 23 2 285,5 2 286,0 Н; FA Fa1 166 Н; FB=0 – плавающая. Далее рассчитываем опору А как наиболее нагруженную. б) Расчет приведенной нагрузки (опора А) P (VXF 2 YF a )К Б К Т где Kt – температурный коэффициент, Kt=1 при t 100C в подшипнике. КБ=1,3 — коэффициент безопасности (с графика нагрузки); V=1 - коэффициент вращения при подвижном внутреннем кольце. Найдем коэффициент радиальной Х и осевой Y нагрузок: Fa 166 0,024 e 0,21 — коэффициент осевого нагружения; C o 6950 Fr=RA Fa 166 0,48 e 0,21 X 0,56;Y 2,16 . VF r 345 P (1 0,56 345 2,16 166 )1,3 1 717 H. в) Долговечность в часах, n=1430 об/мин. Lh 10 6 C 3 10 6 14000 3 ( ) ( ) 867644 t 5256 Н. 60n P 60 1430 717 Расчет долговечности подшипников тихоходного вала а) Расчет реакций в опорах вала Плоскость YOX: 34 RYA Fr 4 b 0,5d 2 Fa4 1380 58 0,5 240 707 l 116 RYA 1421; RYB 1421 1380 41 Н Плоскость ZOX: R ZA l Ft 4 b FbC ; R ZA Ft 4 b FbC 3792 58 3050 100 4525 Н; l 116 R ZB Fb R ZA Ft 4 3050 4525 3792 3783 Н. Равнодействующая: 2 2 R A 1421 4525 4743, Fa 707 2 2 R B 41 3783 3784, Fa 0 б) Приведенная нагрузка (опора А) Fa 707 0,036 e 0,23. C o 19800 Fa 707 0,3 e 0,23 X 0,56;Y 1,9. VF 2 1 2369 P 1 0,56 4743 1,9 707 1,3 1 5199 Н в) Расчетная долговечность, n=28,5 об/мин 3 3 10 6 C 10 6 35100 Lh 179944 часов>t. 60n P 60 28,5 5199 2.11 Расчет валов на прочность Расчет изгибающих моментов. Плоскость YOX: Момент под колесом 2 слева и справа: M yсл2 RYB b 41 0,098 2,4 Нм; сл M yспр 2 M y 2 0,5d 2 Fa4 2,4 0,5 0,24 707 82,4 Нм. Плоскость ZOX: Момент на опоре Б: 35 M ZB FbC 3050 0,1 305 Нм Под колесом 2: M Zспр2 R ZA a 4525 0,058 262,5 Нм Опасное сечение – опора В: здесь максимальный момент: M 305Нм 82,4 2 262,5 2 275 Нм; и одинаковые концентраторы, и меньшие моменты сопротивления сечения (хотя под колесом сечение и ослаблено шпонкой). Расчет на усталостную прочность. Амплитуда и средние напряжения цикла определяются по выражению: a M U 32M U 32 305 10 3 24,9 МПа – симметричный цикл WU d 3 3,14 50 3 a m 2 16T 8 455 103 9,3 МПа – отнулевой цикл 2d 3 3,14 503 Механические характеристики: сталь 45, НВ 220 min: b 800МПа ; Т 440МПа ; 1 0,43 800 340МПа ; 1 0,6 340 200МПа Коэффициенты влияния различных факторов на предел выносливости детали: - шероховатость поверхности: 0,9 при Ra=2,5 мкм - концентрация от посадки с натягом и масштабный фактор: К К 4,0; 4 0,6 0,4 2,8 Е Е Коэффициенты запаса прочности определяются путем решения формул: 1 K 4 24,9 a 0,9 E S S 3,07 6,7 2,8 S 2 2 2 2 1 200 S S 3 , 07 6 , 7 S 6,7 K 2,8 9,3 0,1 9,3 a m 0,9 E S 340 3,07; S>[S]=2,5 36 Выбор смазочных материалов. Смазка картерная: зацепление погружением колеса; подшипники разбрызгиванием: - червячная: Н 192МПа 2 V 50 20 мм / с V S 2,9 м / с - цилиндрическая: Н 476МПа V 3,5 м / с V 50 28; - средняя: V 50 24 мм 2 / с По кинематической вязкости V50 при t=500C, выбираем индустриальное масло И-25А, V50=24…27 мм2/с. 37 ЗАКЛЮЧЕНИЕ В данной выпускной квалификационной работе выполнено проектирование электропривода ленточного конвейера. На первом этапе изучены основы электропривода, изучены их классификация, а также достоинства и недостатки. Анализ различных способов регулирования АД позволяет утверждать, что для снижения энергопотребления универсальным является частотно-регулируемый асинхронный электропривод. Этот вывод будет конкретизирован далее количественными оценками и сравнительным анализом разрабатываемой модели управления в системе ПЧАД. Произведен расчет основных параметров электропривода ленточного конвейера линии распиловки древесины. 38 СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ 1. Москаленко, В.В. Электрический привод [Текст] / В.В. Москаленко. – 2 – е изд. – М.: Академия, 2007. – 320 с. 2. Теория автоматического регулирования [Текст]: учебник для машиностроительных спец. вузов / В.Н. Брюханов, М.Г. Колосов, П.С. Протопопов и др.; Под ред. Ю.М. Соломенцева. – 2-е изд., испр. – М.: Высш. шк., 1999. – 268 с. 3. Электрические машины: Учеб. для вузов [Текст] / И.П. Копылов. – 2- е изд., перераб.– М.: Высш. шк.; Логос; 2000. – 607 с. 4. Браславский И. Я. Энергосберегающий асинхронный электропривод : учеб. пособие для студ. высш. учеб. заведений [Текст] / И. Я. Браславский, З. Ш. Ишматов, В. Н. Поляков ; под ред. И. Я. Браславского. М.: Академия, 2004. 256 с. 5. Браславский И.Я., Ишматов З.Ш. Реализация энергосберегающих технологий на основе регулируемых асинхронных электроприводов [Текст] / Электроинформ. — Львов, 2003. — № 1. — С. 11 —14. 256 с. 6. Электронная техника и преобразователи: учеб. пособие для студ. высш. учеб. заведений [Текст] / А.Т. Бурков. – М.: Транспорт, 1999. – 464 с. 7. Автоматическое управление электроприводами: учеб. пособие для студ. высш. учеб. заведений [Текст] / А.А. Сиротин. – М.: Энергия, 1969. – 560 с. 8. Управление [Электронный ресурс] электроприводом. : Понятие об электроприводе. http://www.electrokiber.ru/oborudovanie/upravlenie- elektroprivodom 9. Комплектные электроприводы станков ЧПУ: Справ. пособие [Текст] / Е.А. Чернов, В.П. Кузьмин. – Горький: Волго-Вятское кн. изд-во, 1989. – 320 с. 10. Импульсный регулируемый электропривод с фазными электродвигателями учеб. пособие для студ. высш. учеб. заведений [Текст] / Э. В. Шикуть, М.И. Крайцберг, П. А. Фукс и др. — М.: Энергия, 1992. — 104 с 39 40