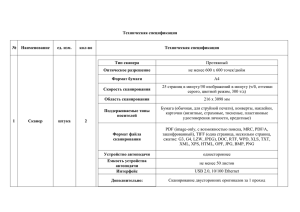
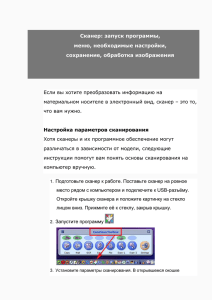
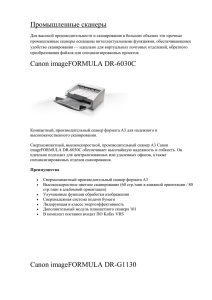
Минобразования Ростовской области Государственное автономное профессиональное образовательное учреждение Ростовской области «Ростовский колледж технологий машиностроения» (ГАПОУ РО «РКТМ») КУРСОВОЙ ПРОЕКТ ПО ТЕМЕ «Оцифровка, доводка и создание прототипа детали посредством 3D моделирования на примере Колесной привод(Германия)» Проект подготовил: студент III курса группы АТ09.24-23 Сердюков И.А Руководитель проекта: Захарченко А.А. г. Ростов-на-Дону 2022 Оглавление Введение........................................................................................................... 3 Глава 1. Теоретическая основа 3D моделирования в машиностроение........ 4 1.1. Связь аддитивных технологий и машиностроения ............................. 4 1.2. Виды сканеров ...................................................................................... 6 Глава 2. Практическая часть ............................................................................. 9 2.1 Бесконтактная оцифровка изделия ........................................................... 9 2.2 Создание редактируемой модели ........................................................... 10 2.2.1 Сканирование ........................................................................................ 10 2.2.3 Создание редактируемой модели в CAD .............................................. 15 2.3 Анализ точности оцифрованной модели ................................................ 18 Заключение ....................................................................................................... 22 2 Введение 3D-моделирование применяется для импортозамещения имея деталь можно отсканировать ее и применить методы реверсивного инжиниринга поучить модели, чертежи и другую конструкторскую документацию необходимую для производства детали. Цель курсовой работы: изучить основы моделирования при помощи примитивов, сплайнов и редактируемых поверхностей с использованием CAD-систем Inventor: Задачи курсовой работы: Разобрать базу и способы работы в создании 3D моделей на примере Колесного привода(Германия). Разобрать основные аспекты работы по реверс-инжинирингу. Подробно изучить этапы работы по реверс-инжинирингу. Освоить использование 3D сканера и системы CAD таких как Autodesk Inventor Professional, GOM Inspect. Применить навыки работы с 3D сканером и системами CAD. 3 Глава 1. Теоретическая основа 3D моделирования в машиностроении 1.1. Связь аддитивных технологий и машиностроения 3D-моделирование позволяет создать прототип будущего сооружения, коммерческого продукта в объемном формате. Современное производство невозможно представить без моделирования продукта компании. Каждую деталь или полноценный объект проще собирать по готовой и продуманной 3D-модели. Метод обратного проектирования применим для любой сферы промышленности и широко применяется в машиностроительной, аэрокосмической, судостроительной и других областях производства. Обратное проектирование состоит из следующих шагов: Обратный инжиниринг в машиностроении и других отраслях применяется, если производитель исходного изделия не предоставляет сведений о структуре, методах создания объекта или они были утеряны. В процессе обратного проектирования изделий мы проходим несколько этапов для получения всей необходимой информации об объекте Разборка готового изделия на детали (при необходимости). Определение применяемых в производстве материалов. Трехмерное сканирование, получение CAD-модели. При необходимости – снятие размеров других элементов устройства. Создание рабочей модели, подгонка и проверка. Разработка чертежей. Ключевой элемент процесса обратного инжиниринга – создание цифровой копии с помощью программного обеспечения CAD (computer-aided design, САПР). Цифровая копия создается вручную или с помощью технологии сканирования в CAD-модель. После того как геометрия детали воспроизведена, инженеру необходимо выбрать технологию изготовления – традиционную или аддитивную. Аддитивные технологии (Additive Manufacturing – от слова аддитивность – прибавляемый) – это послойное наращивание и синтез объекта с помощью компьютерных 3D технологий.Под аддитивным производством понимают процесс выращивания изделий на 3D-принтере по CAD-модели. Этот процесс считается инновационным и противопоставляется традиционным способам промышленного производства. Таким образом, суть аддитивного производства – в сложении, а не вычитании. Если при традиционном производстве вначале имеется заготовка, от которой потом отсекается все лишнее, то в случае с аддитивными технологиями новое изделие создается из ничего, а точнее, из 4 расходного материала. Относительно недавно в 3D-сфере началась новая эра – печать из металлических материалов. Именно данная технология аддитивного производства является основой происходящей сейчас промышленной революции. Преимущества аддитивных технологий: Улучшенные свойства готовой продукции. Благодаря послойному построению, изделия обладают уникальным набором свойств. Например, детали, созданные на металлическом 3D-принтере по своему механическому поведению, плотности, остаточному напряжении и другим свойствам превосходят аналоги, полученные с помощью литья или механической обработки. Большая экономия сырья. Аддитивные технологии используют практически то количество материала, которое нужно для производства вашего изделия. Тогда как при традиционных способах изготовления потери сырья могут составлять до 80-85%. Возможность изготовления изделий со сложной геометрией. Оборудование для аддитивных технологий позволяет производить предметы, которые невозможно получить другим способом. Например, деталь внутри детали. Или очень сложные системы охлаждения на основе сетчатых конструкций (этого не получить ни литьем, ни штамповкой). Мобильность производства и ускорение обмена данными. Больше никаких чертежей, замеров и громоздких образцов. В основе аддитивных технологий лежит компьютерная модель будущего изделия, которую можно передать в считанные минуты на другой конец мира — и сразу начать производство. Сегодня можно выделить следующие технологии аддитивного производства: FDM (Fused deposition modeling). Послойное построение изделия из расплавленной пластиковой нити. Это самый распространенный способ 3D-печати в мире, на основе которого работают миллионы 3D-принтеров — от самых дешевых до промышленных систем трехмерной печати. FDM-принтеры работают с различными типами пластиков, самым популярным и доступным из которых является ABS. Изделия из пластика отличаются высокой прочностью, гибкостью, прекрасно подходят для тестирования продукции, прототипирования, а также для изготовления готовых к эксплуатации объектов. Крупнейшим в мире производителем пластиковых 3D-принтеров является американская компания Stratasys. SLM (Selective laser melting) 5 Селективное лазерное сплавление металлических порошков. Самый распространенный метод 3D-печати металлом. С помощью этой технологии можно быстро изготавливать сложные по геометрии металлические изделия, которые по своим качествам превосходят литейное и прокатное производство. Старейшие производители систем SLM-печати — немецкие компании SLM Solutions и Realizer. В России изготовлением таких 3Dпринтеров занимается компания 3DLAM. SLA (сокращенно от Stereolithography) Лазерная стереолитография, отверждение жидкого фотополимерного материала под действием лазера. Эта технология аддитивного цифрового производства ориентирована на изготовление высокоточных изделий с различными свойствами. Одним из ведущих производителей профессиональных SLA-принтеров является китайская компания UnionTech. SLS (Selective laser sintering) Cелективное лазерное спекание полимерных порошков. С помощью этой технологии можно получать большие изделия с различными физическими свойствами (повышенная прочность, гибкость, термостойкость и др). Крупнейшим производителем SLS-принтеров является американский концерн 3D Systems. Аддитивные технологии активно используются в промышленности. В 1989 году компания BMW начала применять их одной из первых. В то время термин «3D-печать» еще не использовался. В 2018 году предприятие открыло специализированный Центр аддитивного производства в Мюнхене и изготавливает там прототипы, сверхсложные элементы шасси и уже не выпускаемые серийно детали для классических автомобилей В последние годы в США, Саудовской Аравии, Мексике, Франции, России, ОАЭ появляются дома, возведенные методом строительной 3Dпечати. Специальные строительные принтеры создают или небольшие коттеджи, или элементы сооружений, которые потом собираются на месте в целое здание. Технология позволяет строить дома очень быстро и дешево. Площади зданий пока небольшие, но это временно: в Дубае уже стоит напечатанное здание муниципалитета площадью 641 кв. м 1.2. Виды сканеров Сканеры – устройства для перевода объектов в компьютерный вид. Позволяет с компьютера вносить модели, рисунки и др. в память компьютера, с возможностью последующей их обработки. 6 Основная сфера применения 3D сканеров – создание максимально точных 3д моделей для дальнейшей доработки с использованием специализированного программного обеспечения и последующей печати с помощью трехмерных принтеров. Технологии 3D-сканирования: Фотограмметрия. Возникшая из фотографии, фотограмметрия является невероятно полезной технологией в различных областях. Эта технология позволяет получить несколько изображений, сделанных в разных позициях, и триангулировать точки на этих изображениях, чтобы определить их расположение в трехмерном пространстве. Основная классификация выделяет следующие виды 3д сканеров : Контактные. Таким сканерам требуется «потрогать» объект для получения информации. Происходит это за счет управления специальным манипулятором. Скорость зависит от оператора. Бесконтактные. Непосредственный контакт с поверхностью не нужен. Активные. Устройство посылает на сканируемую область волну. Чаще всего лазерный луч или пучок искусственного света. Отраженная волна фиксируется датчиками сканера и преобразуется в координаты. Пассивные. Формирование лазерных лучей или любых других волн не наблюдается. В качестве основы выступает видимый спектр, окружающий нас повсюду. В основе работы 3D сканера – стереозрение. Большинство устройств комплектуются двумя камерами, которые определяют координаты каждой точки будущего точечного облака. Полученное изображение в дальнейшем обрабатывается с помощью ряда компьютерных программ, а используемая в процессе сканирования подсветка придает будущей модели большую точность и надежность. Основной критерий выбор 3D сканер под задачи реверсивного инжиниринга– точность сканирования: Высокоточные. Минимальные погрешности и максимальная детализация объекта – точность исследования до 10 микрон. Общего применения. Средний класс (до 30 микрон). Считаются универсальными, могут применяться в бытовых условиях, отличаются доступной стоимостью. 7 Низкой точности. 3D-сканеры, не нуждающиеся в высоком уровне детализации. Используются, например, в строительстве при оцифровке зданий или в ландшафтном дизайне при формировании проекта. Второй критерий по размерам сканируемых объектов Для мелких объектов. Ювелирная продукция, миниатюрные детали, пресс-формы и т. д. Для средних объектов. Отдельные промышленные механизмы, человек, автомобиль, скульптуры и т. д. Для крупных объектов. Большие машины, промышленные станки, здания, строительная продукция, крупные по площади территории и т. д. Третий по сфере применения Они используются практически везде, но среди самых популярных сфер выделяются: инженерные задачи; художественное сканирование, музеи; медицина, человеческое тело; стоматология; строительство, проектирование крупногабаритных объектов Четвертый по уровню мобильности Ручные. Универсальный вариант. Подходят как для использования в быту, так и для промышленной оцифровки. Стационарные. Применяются для сканирования небольших объектов, которые помещаются на специальную платформу. 8 Глава 2. Практическая часть 2.1 Бесконтактная оцифровка изделия Бесконтактный 3D-сканер - система, состоящая из набора камер, проектора и специализированного ПО. Принцип работы сканера основан на анализе полученного отраженного светового потока. Сканер состоит из камер (1 или 2 камеры), проектора, штатива. Так же сканер не будет работать без лицензионного ключа и ПО. Дополнительным, но не обязательным элементом является поворотный стол. Сканирование – аналого-цифровое преобразование плоского изображения в цифровую растровую форму с помощью сканера. Благодаря сканированию мы можем получить компьютерную 3D модель любого объекта и использовать ее для дальнейшего редактирования, анализа или копирования. Принцип работы сканера основан на анализе полученного отраженного светового потока. Преимущества: 1. Простота использования 2. Высокая точность полигональной модели 3. Универсальность Порядок выполнения работы: 1.Подготовить детали для сканирования таким образом, чтобы дефектоскопический спрей лег как можно ровней и тоньше, не допуская подтеков, наплывов и существенных перепадов толщины напыления. 2. Оцифровать необходимые детали и получить для них сшитые облака точек, без невосполнимых пропусков данных и иных артефактов, содержащие в себе необходимую информацию об изделиях. 3. Полученные облака точек преобразовать в полигональные модели (формат *.stl) и выровнять их для возможности дальнейшего процесса обратного проектирования. Полученные облака точек должны быть пригодны для проведения контроля качества моделирования. 9 2.2 Создание редактируемой модели 2.2.1 Сканирование Для задачи оцифровки колеса я выбрал 3д сканер 3D сканер RangeVision Spectrum- это профессиональный 3D сканер высокого разрешения, который отлично подойдет для сканирования объектов от 1 см до 3 метров. Преимущества RangeVision Spectrum: Три настраиваемые области сканирования для профессиональной оцифровки объектов любых размеров, от 1см до 3м Две промышленные камеры для получения цветных 3D моделей с высокой детализацией (от 0,072мм) В зависимости от особенностей объекта и условий работы, вы можете выбрать любой удобный режим сканирования - для сканирования объектов любых размеров и форм Поддержка сканирования текстур в высоком разрешении (3D сканирование в цвете) Область применения: 3D сканирование для фрезерных станков Обратный инжиниринг 3D сканирование объектов любой сложности 3D сканирование деталей с высокой точностью до 0.04 мм. RangeVision Spectrum- очень точный 3D сканер позволяет получать 3D модели объектов с высокой точностью (до 0.04 мм) и степенью детализации (0.072 мм). Производство: Россия Характеристики Метод сканирования: Структурированный подсвет, оптическая триангуляция Количество зон сканирования: 3 Камеры: 3.1 MPix (Обращаем Ваше внимание, что модель Spectrum оснащена 2 камерами для более точного определения 3D точки). Рабочий диапазон (минимальный): 133x100x100 мм Рабочий диапазон (максимальный): 520x390x390 мм Размер объекта сканирования (мин): 1 см Размер объекта сканирования (макс): 3 м Точность сканирования: от 0,04 мм Степень детализации: 0,072- 0,26 мм Формат данных: STL 10 Основные инструменты редактирования полигональной сетки: Построение сетки (полигональной модели) Работа с сеткой В «Настройках» в разделе «Меш» множествo настроек для построения полигональной модели по облаку точек: В подразделе «Построение меша» можно изменить: Тип реконструкции меша – SSD / Poisson, тип реконструкции Poisson больше подходит для тонкостенных деталей; установить предварительную обрезку; настроить удаление изолированных частей при построении; включить или выключить исправление(зашивку) дыр от позиционных маркеров. В подразделе «Заполнение дыр» можно изменить периметр дыр для автоматического заполнения при построении меша. Выбрать алгоритмы заполнения по кривизне. После завершения работы с облаком точек, чистки скана, исправления нормалей, совмещения нескольких сканов, перешел в раздел работы с сеткой «Меш» в основном меню Нажал на иконку «Построить меш». После построения сетки в дереве проекта в разделе «Меш» появится информация о количестве полигонов(треугольников) и о количестве вершин. Экспoртировал (сохранил) полигональную модель в форматах stl и .ply можно, нажал на иконку «Экспорт» . Для выбора полигонов использовал те же инструменты что и при работе с облаком точек. При построении сетки, на границах дыр иногда появляются выгнутые полигоны. Для их исправления, необходимо использовать функцию «Удалить граничные точки» нажав на иконку. Если применить функцию «Удалить граничные точки», то она применится ко всей модели. Для выбора использовал кнопки на панели инструментов над окном просмотра или быструю клавишу «S». После сканирования, деталь имеет много шумов и неровностей. Для дальнейшей работы, необходимо очистить деталь от шумов. Далее надо удалить шумы и сделать финальное совмещение, где нам показывает точность 0.089 т.е для сельскохозяйственного машиностроения. 11 Рисунок 2.1 общий скан модели с общей погрешностью. Далее я совмещаю группу точек чтобы получить единую деталь для дальнейшей обработки: Рисунок 2.2 построенная модель. 2.2.2 Выравнивание по сетке координат Для дальнейшей работы необходимы выровнять деталь по осям. В программе GOM Inspect. Для того, чтобы выровнять её, необходимо создать плоскость и линии направления оси. 12 1. Создаём плоскость коррекции (Построить-Плоскость-Плоскость коррекции...). и выбираем необходимую плоскость на которой будет находится ось Z. 2. Создаём линию по 2-м точкам (Построить-Линия-2х точечная линия...) в месте и направлении, где будет находиться ось X. 3. Создаём еще одну 2-х точечную линию (Построить-Линия-2х точечная линия...) по центру детали и перпендикулярно линии оси X. После построение всех нужных линии и плоскостей, необходимо применить инструмент выравнивания (Операции-Выравнивания-Исходное выравнивания-(3-2-1...)). В пункте “Правило”, выбираем ZZZ-YY-X. В панели “Плоскость”, (Z1, Z2, Z3) с зажатой клавишей Ctrl выбираем созданную плоскость в любых 3-х точках. В панели “Линия” (Y1, Y2) выбираем 2 линии, построенные ранее. В панели “Точка” (X) выбираем позицию пересечение 2-х линии и нажимаем ОК. Первый этап построить 2 плоскости (смотреть рисунок 2.3) Рисунок 2.3 Основа для выравнивания детали по осям координат. Одна плоскость нужна для установки координаты X, а вторая вспомогательная плоскость для дальнейшей установки высоты т.е координата Z данное показано на рисунке 2.4. 13 Рисунок 2.4 установка координат Z и Y. Здесь вы наблюдаете 2 линии самая маленькая смотрящая вверх является высотой, горизонтальная линия привязана к отверстию и это будет нашей координатой Y и это относится к рисунку 2.4 Рисунок 2.5 общий вид установленных вспомогательных элементов. На этом рисунке 2.5 показано подробно что и как я выбирал, для выравнивания модели. 14 Рисунок 2.6 выровненная делать. Выровненная на рисунке 2.6 модель пригодна для дальнейшей обработки. Выставления нуля требуется для точности и возможности проектирования твердотельной модели сборки. 2.2.3 Создание редактируемой модели в CAD После выравнивания я приступил к созданию детали в программе Autodesk Inventor Professional. Для начала надо разбить скан на более простые объекты и в конце соединить их в сборку. Для построения сборки были выделены 3 конструктивных элемента. Две дуги и ребра жесткости. На рисунке 2.7, 2.8 и 2.9 Представлены 3D модели конструктивных элементов, для сборки готовой модели. 15 Рисунок 2.7 Конструктивный элемент - тонкая дуга Рисунок 2.8 Конструктивный элемент - широкая дуга 16 Рисунок 2.9 Конструктивный элемент- ребро жёсткости. Конструктивные элементы – ребра жесткости расположены в модели радиально. Поэтому для точного расположения их необходимо вычислить углы, на которых они расположены относительно центра. А затем построить копии элемента при помощи функции «Круговой массив». Результат выполнения этой операции показан на рисунке 2.10. Рисунок 2.10 Круговой массив элементов «Ребро жесткости» После этого в режиме сборки соединяем модели всех конструктивных элементов. Результат этой операции показан на рисунке 2.11 17 Рисунок 2.11 Твердотельная модель сборки детали. 2.3 Анализ точности оцифрованной модели Влияниe температуры на точность заключается в том, что подaвляющее количество веществ расширяется при нaгревании. Эффект теплового рaсширения уменьшает точность 3д сканирования. В неподготовленном помещении температура может колебаться в пределах 10 и более градусов. При этом размеры объектов в зависимости от материала их исполнения будут меняться в большую или мeньшую сторону. Таким образом, для некоторых объектов нет существенной ценности в точности более 0.1-0.2 мм/метр. Точность при совмещении сканов объекта проявляется в том, что сканируя объект с разных ракурсов, появляется сложность в обработке дальнейших результатов, поскольку возникают погрешности при совмещении различных фрагментов. Используется несколько технологий совмещения: 1. Совмещения по поверхностным геометрическим отличительным чертам. Точность этой технологии самая высокая, но только если объект обладает достаточным количеством характерных особенностей. Если объект целиком помещается в области сканирования, падение точности при совмещении малозначимо. В случае если геометрических особенностей недостаточно (сканирование больших гладких объектов), используются другие технологии совмещения. 2. Совмещение по маркерам. Перед процессом сканирования происходит подготовка модели к работе – в произвольном хаотичном порядке 18 равномерно по поверхности наклеиваются маркеры контрастного (по отношению к объекту) цвета. Сканер автоматически считывает координаты маркером и совмещает фрагменты. 3. Совмещение по маркерам с использованием фотограмметрической системы. Для больших объектов используется технология, когда координаты маркеров оцениваются заранее с помощью фотограмметрической системой, что обеспечивает высокую точность. Причины потери точности при трехмерном сканировании: Идеальные условия такм образом таковы что Объект должен быть: Твердый, статичный, светлый, матовый, гладкий, без отверстий, с хорошей геометрией, полностью помещаться в область сканирования, сканируется перпендикулярно к поверхности, сканер прогрет до рабочей температуры, откалиброван, освещение не меняется во время сканирования, камера на рекомендованном расстоянии, температура в помещении стабильна. Условия, вызывающие затруднения заключается в деформируемых объектах, Перемещениях объектов относительно сканера в процессе сканирования, Тёмный объект, Блестящий или полупрозрачный объект, Наличие острых рёбер, Изделие с краями листового материала, Вырожденности вдоль одной или нескольких осей, Большой или длинный объект, требуется сканирование фрагментами, Сканируется “под углом”, 3D сканер не прогрет до приемлемой рабочей температуры, Сканирование производится в условиях ненормированной температуры, Яркое направленное внешнее освещение, Камеры сдвинуты для сканирования впадин , Температура в помещении меняется от внешних погодных условий Результат работы в неидеальных условиях ведут к таким проблемам как то, что части объекта, отсканированные с разных ракурсов искажены. Возникают проблемы при совмещении частей в единое изделие, Любое движение приводит к искажению результата и ухудшению детализации, Большинство сканеров не сканирует черные объекты, в 3д модели на этих местах будут дыры, требуется их предварительное матирование, В 3д модели на этих местах будут дыры, требуется их предварительное матирование, Острые края немного смягчаются, желательно соблюдать правила взаимного расположения сканера и острых краёв, Край тонкого листа на 3D данных всегда обрывается, не доходя до реальной границы объекта, Отдельные фрагменты невозможно качественно совместить, точность без использования маркеров становится неконтролируемой, При совмещении фрагментов появляются ошибки, Снижение значений точности и детализации, Измерения заведомо будут содержать ошибки, Масштаб результата будет отличаться от реального объекта, Повышенный уровень шумов в данных или 19 невозможность работы, Повышенный шум в данных, Изменение параметров изделия в зависимости от внешней температуры. Проведение контрольных измерений с помощью мерительных инструментов показало что размеры модели соответствуют размерам оцифровымаемого изделия. На рисунке 2.12 приведен пример конструкторской документации чертеж колесного привода. Рисунок 2.12 чертеж «Колесный привод (Германия)». Графическое изображение компьютерной приведено на рисунке 2.13 трехмерной модели детали 20 Рисунок 1.13 графическое изображение трехмерной модели детали «Колесный привод (Германия)». 21 Заключение В результате работы над курсовым проектом я приобрел навыки сканирования объектов для задач обратного инжиниринга. Применил ранее полученные навыки работы с Autodesk Inventor Professional. А также приобрел навыки работы с такими CAD как GOM Inspect Результаты контрольных измерений полученной модели – удовлетворительны. Модель подходит для производства посредством лазерной резки и дальнейшей сварки. Чертежи и другая конструкторская документация могут быть переданы на производство для задач импортозамещения. В результате работы над курсовым проектом я решил задачу обратного инжиниринга на примере колесного привода. Использованные программы Autodesk Inventor Professional, GOM Software, ScanCenter NG 22 Список литературы. 1. https://old.sk.ru/news/b/press/archive/2019/09/18/additivnye-tehnologii_1320_-chto-eto-takoe-i-gde-primenyayutsya.aspx 2. https://rostec.ru/news/kak-eto-rabotaet-promyshlennyy-3d-printer/ 3. https://www.plm-ural.ru/resheniya/reversivnyy-inzhiniring 4. http://static.government.ru/media/files/ogvdrJAzZEx7roHJAZwVEGZw6yTx BaJu.pdf 5. https://scanform.ru/application/areas-of-use/ 6. https://form3dprint.ru/tech-documentations/inzheneriya-rukovodstvo-pobystromu-prototipirovaniyu/ 7. https://habr.com/ru/post/592889/ 8. https://3dcontrol.ru/services/revers-inzhiniring/reversivnyy-inzhiniring 9. https://lider-3d.ru/services/3d-modelirovanie/redaktirovanie-poligonalnoysetki/ 10. https://rangevision.com/products/spectrum/ 11. Я. Гибсон, Д. Розен, Б. Стакер Технология аддитивного производства / Шишковский И.-М.: Техносфера, 2016.-656 с. 12. Гаврилов, С. Методы анализа логических корреляций для САПР цифровых КМОП СБИС / С. Гаврилов. - М.: Техносфера, 2011. - 136 c. 13. Курейчик, В. М. Комбинаторные аппаратные модели и алгоритмы в САПР / В.М. Курейчик, В.М. Глушань, Л.И. Щербаков. - М.: Радио и связь, 1990. - 216 c. 14. Амблер, С. Гибкие технологии: экстремальное программирование и унифицированный процесс разработки / С. Амблер. - М.: СПб: Питер, 2005. - 416 c. 15. Курейчик, В. М. Комбинаторные аппаратные модели и алгоритмы в САПР / В.М. Курейчик, В.М. Глушань, Л.И. Щербаков. - М.: Радио и связь, 1990. - 216 c. 16. Климов, В.Е. Графические системы САПР / В.Е. Климов. - М.: Высшая школа, 1990. - 142 c. 23 Приложения 24