Тема 1.15.1: Пуск асинхронных двигателей с фазным ротором. Пуск асинхронных двигателей с короткозамкнутым ротором. Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками. Регулирование частоты вращения асинхронных двигателей. Тормозные режимы асинхронных двигателей.
реклама

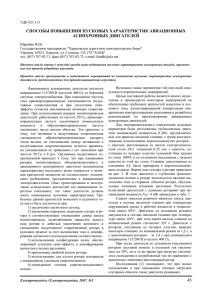
МДК.03.01. гр. 4.3 Лекция № 1 Тема 1.15.1: Пуск асинхронных двигателей с фазным ротором. Пуск асинхронных двигателей с короткозамкнутым ротором. Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками. Регулирование частоты вращения асинхронных двигателей. Тормозные режимы асинхронных двигателей. Пуск асинхронных двигателей с фазным ротором. Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора. Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины. При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент. Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора. Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов. Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента. Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 - 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой. Пуск асинхронных двигателей с короткозамкнутым ротором Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами: 1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный. 2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник». Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками. Стремление улучшить пусковые свойства асинхронных двигателей с короткозамкнутым ротором привело к созданию асинхронных двигателей с особой конструкцией ротора: двигателей с глубокими пазами на роторе и двигателей с двумя короткозамкнутыми клетками на роторе. Двигатель с глубокими пазами на роторе. От обычного асинхронного двигателя этот двигатель отличается тем, что у него пазы ротора сделаны в виде узких глубоких щелей, в которые уложены стержни обмотки ротора, представляющие собой узкие полосы. Таким образом, двигатель с глубокими пазами на роторе обладает благоприятным соотношением пусковых параметров: большим пусковым моментом при сравнительно небольшом пусковом токе. По мере нарастания частоты вращения ротора частота тока в роторе убывает. В связи с этим уменьшается индуктивное сопротивление обмотки ротора. Распределение плотности тока по высоте стержня в том случае становится более равномерным, что ведет к уменьшению активного сопротивления ротора. При работе двигателя с номинальной частотой вращения, процесс «вытеснения» тока практически прекращается и двигатель работает, как обычный короткозамкнутый. Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе (рис. 1, а): рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору. Рис. 1 Стержни пусковой клетки обычно выполняют из латуни или бронзы — материалов, обладающих более высоким, чем у меди, активным сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки невелико, так как ее стержни расположены вблизи воздушного зазора и к тому же с двух сторон имеют воздушные щели (рис. 1, б). Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями пусковой клетки они имеют большее сечение. Это обеспечивает рабочей клетке малое активное сопротивление. Но зато индуктивное сопротивление рабочей клетки больше, чем у пусковой, особенно в начальный период пуска, когда частота тока в роторе сравнительно велика (f2≈f1). В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки (рис. 1, б). Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный: пусковой момент при пониженном пусковом токе. Регулирование частоты вращения асинхронных двигателей Регулирование частоты вращения возможно тремя способами: изменением частоты f, числа полюсов р и скольжения S. 1. Частотное регулирование Двигатель питается от преобразователя частоты. Для получения требуемой характеристики двигателя следует изменять не только частоту напряжения, но и значение напряжения. Этот способ является наиболее экономичным и перспективным. Достоинства: - широкий диапазон регулирования; - плавность регулирования; - жесткая механическая характеристика при всех частотах; - диапазон регулирования не зависит от нагрузки; - высокая экономичность. Недостаток: - высокая стоимость преобразователя частоты. 2. Изменение числа пар полюсов Для изменения числа пар полюсов используется две конструкции двигателей: - с несколькими обмотками на статоре, уложенные в одни и те же пазы; - с одной обмоткой, допускающий переключение ее секций для получения различного числа пар полюсов. Такие двигатели называют многоскоростными. Достоинства: - простота реализации; - высокая жесткость механических характеристик. Недостатки: - ступенчатое регулирование скорости; - сравнительно низкий диапазон регулирования. 3. Изменение питающего напряжения Осуществляется при помощи тиристорного регулятора напряжения (ТРН). Применяется в основном для двигателей с вентиляторной нагрузкой и для микродвигателей при необходимости регулирования скорости в небольшом диапазоне. 4. Изменение активного сопротивления цепи ротора Для двигателей с фазным ротором регулирование частоты вращения осуществляется путём изменения активного сопротивления в цепи ротора. Достоинства: - простота и низкая стоимость; - плавность регулирования; Недостатки: - мягкая механическая характеристика при малых частотах вращения; - малая экономичность (низкий КПД); - диапазон регулирования зависит от нагрузки. Вследствие больших потерь рассматриваемый способ регулирования применяется для двигателей небольшой и средней мощности в тех случаях, когда требуется небольшой диапазон регулирования скорости и непродолжительная работа на пониженных скоростях. Этот способ регулирования находит применение, например, в электроприводах различных подъемно-транспортных машин и механизмов. Тормозные режимы асинхронных двигателей. Асинхронный двигатель может работать в следующих тормозных режимах: 1) генераторное торможение с отдачей энергии в сеть; 2) торможение противовключением; 3) динамическое торможение. Все перечисленные способы применимы принципиально как к двигателю с фазным ротором, так и короткозамкнутым ротором. Генераторное торможение с отдачей энергии в сеть Как все электрические машины, асинхронная машина, обратима. Если к валу асинхронной машины приложен тормозной статический момент, то она, преодолевая внешний момент, работает как двигатель и потребляет мощность из сети. Если внешний статический момент на валу двигателя отсутствует, то двигатель, подключенный к сети, будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если же с помощью первичного двигателя вращать ротор с синхронной скоростью, то есть будет покрывать только потери статора, а потери ротора (механические и в стали) будут покрываться первичным двигателем. Торможение противовключением асинхронного двигателя Значительно большее применение на практике имеет торможение противовключением. · Торможение противовключением посредством включения значительного по величине сопротивления в цепь ротора. Режим противовключения можно получить в том случае, если обмотка статора будет включена для одного направления вращения, а ротор под действием внешнего момента или по инерции будет вращаться в противоположном направлении. Этот режим может иметь место в подъемно – транспортных установках при спуске груза, когда статор двигается включен для работы на подъем, а ротор под действием момента от груза вращается в противоположном направлении. Торможение противовключением изменением порядка чередования фаз статора АД Наиболее часто режим противовключения применяется для быстрой остановки двигателя. Для перехода из двигательного режима в режим противовключения необходимо переключить две фазы статора. Вращающееся поле статора при этом изменит направление вращения, а ротор по инерции будет вращаться в прежнем направлении. Машина перейдет в режим противовключения. Динамическое торможение асинхронных двигателей Динамическое торможение асинхронного двигателя осуществляется обычно отключением статора двигателя от сети переменного тока и включением его на сеть постоянного тока. Для перехода из двигательного режима в режим динамического торможения контактор КМ1 отключает статор от сети переменного тока, а контактор КМ2 присоединяет обмотку статора к сети постоянного тока. Ротор при отключении двигателя продолжает вращаться по инерции. По обмоткам статора начинает протекать постоянный ток, который образует неподвижное магнитное поле статора. Под действием этого поля в обмотках вращающегося ротора наводится ЭДС. А так как обмотка ротора замкнута на сопротивление, то по ним протекает ток, величина которого определяется значением наводимой ЭДС и сопротивлением цепи ротора. Взаимодействие неподвижного магнитного потока статора с током ротора создает тормозной момент двигателя.