SIMSIZ RADIO TIZIMLARIDA MA'LUMOT UZATISHNING DIFFERENTSIAL USULLARI
advertisement

1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
–––––––––––––––––––––––––––––––
ОДЕССКАЯ НАЦИОНАЛЬНАЯ АКАДЕМИЯ СВЯЗИ
им. А.С.ПОПОВА
––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Кафедра теории электрической связи им. А. Г. Зюко
В.Л. Банкет
МЕТОДЫ ПЕРЕДАЧИ ИНФОРМАЦИИ
В СИСТЕМАХ БЕСПРОВОДНОГО ДОСТУПА
К ТЕЛЕКОММУНИКАЦИОННЫМ СЕТЯМ
НОВОГО ПОКОЛЕНИЯ
Учебное пособие
Одесса 2013
2
УДК 519.95
ББК 318
Банкет В. Л.Методы передачи информации в системах беспроводного
доступа к телекоммуникационным сетям нового поколения.–Одесса:ОНАС,
2013.– 178 с.
Пособие
содержит
сведения
о
перспективных
телекоммуникационных
сетей–
о
сетях
тенденциях
нового
поколения
развития
NGN.
Сформулированы требования к методам передачи информации в таких сетях и,
в первую очередь, передачи сообщений по каналам беспроводного доступа
(радиоканалам). Изложены статистические характеристики замираний в
радиоканалах. Дана классификация методов разнесения, предназначенных для
передачи информации по каналам с замираниями. Разработаны основы
дифференциальных методов передачи информации для таких каналов, новые
методы
промехоустойчивого
кодирования
и
новые
сигнально-кодовые
конструкции для таких каналов. Разработан перечень магистерских и
аспирантских
исследовательских
работ
по
этой
тематике.
Пособие
предназначено для студентов, молодых преподавателей, стажеров, аспирантов
и магистрантов академии связи.
3
СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………………………..…6
1. СЕТИ НОВОГО ПОКОЛЕНИЯ И ИНФОКОММУНИКАЦИОННЫЕ
УСЛУГИ…………………………………………………………………………..8
1.1.Глобальная и Европейская информационные инфраструктуры…………...…8
1.2.Инфокоммуникационные услуги и сети нового поколения……………….10
1.3.Широкополосные услуги в сетях нового поколения……………………....12
1.4.Современные технологии широкополосного беспроводного доступа…...13
2.МОДЕЛИ КАНАЛОВ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ…………..…….14
2.1.Классификация замираний сигнала в системах радиосвязи……………....14
2.2. Важные характеристики замираний……………………………………..…19
2.3.Стандартизованные характеристики моделей замираний…………………22
2.4.Особенности стандарта IEEE 802.16a…………………………………….…24
3.МЕТОДЫ РАЗНЕСЕНИЯ В СИСТЕМАХ РАДИОСВЯЗИ…………………...27
3.1.Классификация методов разнесения...............................................................27
3.2.Пространственно-временное кодирование в системах
беспроводной связи………………..…………………………………..……..31
4.МЕТОДЫ РАЗНЕСЕННОГО ПРИЕМА В КАНАЛАХ С ЗАМИРАНИЯМИ..40
4.1.Введение…………………………………..………………………………..40
4.2.Методы комбинирования и коммутации при разнесенном приеме………41
4.3.Улучшение характеристик несущая/шум, несущая/помеха……………….46
4.4.Улучшение характеристик помехоустойчивости…………………………..50
4.5.Зависимость средней вероятности ошибки от отношения
несущая/шум…………………………………………………………………..50
5. МЕТОДЫ МОДУЛЯЦИИ И ДЛЯ СИСТЕМ БЕСПРОВОДНОГО
ДОСТУПА………………………………………………………………………54
5.1. Ансамбли двумерных многопозиционных
сигналов…………………………………………………………………………..…54
4
5.2.Широкополосные сигналы на базе ортогональных гармонических
переносчиков (OFDM)………………………………………………...……62
5.3.Сигнально-кодовые конструкции…………………………………………..64
6.ДИФФЕРЕНЦИАЛЬНЫЕ МЕТОДЫ ПЕРЕДАЧИ ИНФОРМАЦИИ В
СИСТЕМАХ БЕСПРОВОДНОЙ РАДИОСВЯЗИ…………………………...71
6.1.Введение………………………………………………………………………71
6.2.Исчисление конечных разностей. Определения и
свойства…………………………………………………………………..…..74
6.3.Дифференциальная передача данных по каналу с неоднозначностью… 75
6.4.Модель системы передачи информации по технологии MIMO…………..78
6.5.Информационная теория метода ПВК в каналах MIMO……………………..83
6.6.Дифференциальная передача по каналу SISO………………………………84
6.7.Дифференциальная передача по каналу MIMO…………………………….89
6.8.Возможности применения внешнего корректирующего кодирования…...90
6.9.Модель канала с неопределенностью частоты……………………………..92
6.10.Дифференциальное кодирование второго порядка……………….…...…94
6.11.Реализация разнесенного приема дифференциально модулированных
ФМ сигналов………………………………………………………………….95
6.11.Демодуляция дифференциально модулированных многочастотных
ФМ сигналов с использованием активных фильтров………………………112
7.ЭФФЕКТИВНЫЕ КОДЫ И СИГНАЛЬНО-КОДОВЫЕ КОНСТРУКЦИИ
ДЛЯ СИСТЕМ БЕСПРОВОДНОГО ДОСТУПА…………………………..130
7.1.Выбор характеристик внешних СК для решетчатых СКК с внутренними
сигналами дифференциальной ФМ…………………………………………130
7.2.Двоичные сверточные коды для каналов с сигналами
дифференциальной ФМ………………………………………………………134
7.3.Внешние сверточные коды для сигнально-кодовых конструкций с
внутренними сигналами многопозиционной дифференциальной ФМ………147
ЗАКЛЮЧЕНИЕ…………………………………………………………………156
ПРИЛОЖЕНИЯ
А.Перечень тем исследовательских научных работ
магистрантов и аспирантов…………………………………………………157
5
Б.Композитные коды Баркера……………………………………………….159
Список использованных источников………………………………………….173
6
Введение
Современный этап развития мировой цивилизации характеризуется
переходом от индустриального общества к информационному. Такой переход
предполагает возникновение новых форм социальной и экономической
деятельности, базирующихся на массовом использовании информационных и
телекоммуникационных
технологий.
Технологический
основой
информационного
общества
будет
Глобальная
Информационная
Инфраструктура (ГИИ). Попытки приспособить для решения задач построения
ГИИ существующие технологии транспортных сетей (ретрансляции кадров
Frame Relay, асинхронный режим передачи ATM, метод синхронной цифровой
иерархии SDH и т.п.) оказывались безуспешными. Возник вопрос о разработке
новой концепции сети, в которой функции организации и предоставления
информационных услуг были бы отделены от функций управления
транспортом и коммутацией. Такие сети получили название Сетей
Следующего Поколения– New Generation Netwwork (NGN). В русскоязычной
литературе такие сети именуют как Сети Нового Поколения[6].
Международные нормирующие
организации
(Международный
союз
электросвязи ITU, Европейский институт телекоммуникационных стандартов
ETSI и др.) разработали ряд нормативных документов по сетям NGN, внедрение
которых потребует решения множества научно-технических задач. В этих
документах большое внимание уделено необходимости предоставления в NGN
широкополосных (высокоскоростных) услуг. В условиях все возрастающего
потока требований пользователей сетей NGN к номенклатуре и качеству услуг,
руководствуясь нормативными документами ITU и ETSI, ведущие
университеты и исследовательские организации в сфере телекоммуникаций
приступили к разработке методов передачи информации в сетях нового
поколения. Особое внимание при этом уделяется разработке методов
беспроводной связи. Реализация беспроводного доступа к таким сетям (т.е.
доступа по радиоканалам) есть, по существу, продолжение известного лозунга,
модного на заре развития мобильной связи: «предоставление услуг any body,
any time, any where»–любому абоненту, повсюду и в любое время.
Опубликован ряд обстоятельных руководств по технологиям беспроводного
доступа [10,11]. На кафедре теории электрической связи ОНАС им.А.С. Попова
в последнее время также проводились исследования этого перспективного
научного направления. Подготовлены и защищены кандидатские диссертации
Н.А.Ищенко и Н.В. Несгазинской. Опубликована монография В. Л.Банкета
[26]. При подготовке упомянутых выше работ был использован ряд статей
7
передовой западной научно-технической печати, недоступных отечественным
исследователям. Вместе с тем, возможности дальнейшего совершенствования
методов передачи цифровой информации по каналам беспроводной связи
далеко не исчерпаны. Канал беспроводной радиосвязи радикально отличается
от «спокойных» каналов наземной связи (проводных, волоконно-оптических и
т.п.) наличием, прежде всего, многопутевого (многолучевого) распространения
сигнала. Исследователь, знакомый с традиционными проблемами эффективной
передачи информации в таких каналах, обнаружит для себя, условно говоря,
«новое» поле научной деятельности, порождаемое возможностями
использования
пространственной
обработки
(иными
словами,
пространственного кодирования/декодирования) с целью повышения
помехоустойчивости. Если ранее такие ресурсы канала передачи как время
передачи и частота сигнала образовывали, условно говоря, плоское двумерное
«поле» для «размещения» эффективных методов передачи, то теперь к этим
«измерениям» добавляется пространство. И в таком трехмерном «объеме»
можно
организовывать
«пространственно-частотно-временное
кодирование», решая при этом задачи оптимизации. В настоящем учебном
пособии предпринята попытка обобщить результаты, полученные как
зарубежными, так и отечественными авторами (в частности, автором пособия
совместно с аспирантами Ю.Н. Тотминой и А.Д. Персиным). Такое обобщение
имеет целью создание теоретической базы для дальнейших студенческих,
магистерских и аспирантских исследовательских работ в этом плодотворном
научном направлении. С этой целью в конце пособия приведен перечень тем
студенческих, магистерских и аспирантских исследовательских работ. Каждая
тема снабжена ссылками на соответствующий раздел пособия. В пособии
принят упощенный порядок нумерации элементов текста: номера формул,
рисунков и таблиц начинаются с номера раздела, в тексте которого они
расположены (например, формула (2.3), рис.1.1,таб.3.5 и т. д.).
8
1. СЕТИ НОВОГО ПОКОЛЕНИЯ И
ИНФОКОММУНИКАЦИОННЫЕ УСЛУГИ
1.1.Глобальная и Европейская информационные инфраструктуры
На рубеже IXX-XX столетий стало очевидно, что информация и
информационные технологии превращаются в решающую движущую силу в
формировании мировой экономической системы. Темпы создания информации,
ее доступность и многочисленные области ее применения вызывают
существенные изменения в каждой национальной экономике. Эти изменения
являются
результатом
конвергенции
(объединения)
электросвязи,
компьютерной техники и средств массовой информации. Границы между
различными типами сетей, используемых для передачи речи, данных и
изображений постепенно стираются. Многие виды информационных услуг
могут быть объединены и могут доставляться одной и той же системой
передачи.
Разветвленные
информационных
сети
сигналов
на
смогут
базе
различных
предоставлять
средств
передачи
широкий
диапазон
телекоммуникационных и информационных услуг. Поиск путей эффективного
решения назревших проблем привел к постановке вопроса об обновлении всей
инфраструктуры телекоммуникаций на базе идеи создания Глобальной
Информационной
Инфраструктуры
(ГИИ).
Идея
построения
ГИИ,
состоящая в объединении ресурсов информационных технологий и развитой
инфраструктуры электросвязи с целью обеспечения любых пользователей
разнообразной информацией в реальном масштабе времени независимо от
расстояния и используемых технических средств впервые была широко
представлена на Первой Всемирной Конференции МСЭ по развитию
электросвязи в Буэнос-Айресе в 1994 г.
ГИИ – качественно новое информационное образование, формирование
которого начала в 1995 г. группа развитых стран мирового сообщества. По их
замыслу ГИИ будет представлять собой интегрированную общемировую
информационную сеть массового обслуживания населения нашей планеты
9
на
основе
интеграции
глобальных
и
региональных
инфотелекоммуникационных систем, а также систем цифрового телевидения и
радиовещания, спутниковых систем и подвижной связи. Концепция ГИИ
выходит за рамки простого усовершенствования аппаратного и программного
обеспечения. Это целая система мероприятий, призванных вовлечь в
созидательный процесс все мировое сообщество. Предполагалось, что ГИИ
сможет предложить потребителям в каждой стране беспрецендентный доступ к
информации из различных источников в глобальном масштабе. В основу
построения ГИИ положено пять основных принципов. Эти принципы
одинаково применимы как к информационной технологии и технике связи, так
и к индустрии информационных услуг. Среди них[1]:
1.Предоставление свободного доступа.
2.Создание гибкой регулирующей среды.
3.Обеспечение универсального обслуживания.
4.Поощрение конкуренции.
5.Поощрение частных инвестиций.
Техническую основу глобальной сети будут составлять разветвленные
трансконтинентальные сети с использованием различного типа линий
(волоконно-оптических,
проводных,
спутниковых),
а
также
широко
разветвленные сети абонентского доступа к ним. Каждый из составляющих
сеть компонентов должен быть интегрирован в глобальную сеть на основе
единых стандартов, которые обеспечивали бы совместную работу сетей.
Успешное создание и развитие ГИИ возможно только на основе эффективной
международной кооперации и сотрудничества. Участие каждой страны в
адаптации своих систем инфокоммуникаций в ГИИ позволит ускорить не
только интеграцию в мировое информационное сообщество, но и вывести
национальные средства телекоммуникаций на новый качественный уровень. В
настоящее время разработки различных аспектов построения ГИИ проводятся
практически на всех уровнях региональными и национальными организациями.
Международный Союз Электросвязи образовал в каталоге Рекомендаций
10
специальную серию «ITU-T Y-Series Recommendations Global Informaton
Infrastructure, Internet protokol aspects and Next Generation Networks», в которой
сформулированы особенности ГИИ, определены контуры и структура сетей
следующего поколения, как технической и технологической основы реализации
проекта ГИИ. Одновременно исследования по проблемам ГИИ стартовали в
Европейском
Союзе.
В
Европейском
Институте
Стандартов
по
телекоммуникациям ETSI группа экспертов высокого уровня под руководством
M.Bangemann разработала свод Рекомендаций Совету Европы по проблемам
ЕИИ [2], известный как «Отчет Бангеманна». Европейская Комиссия учредила
специальное
Бюро
по
проблемам
информационного
общества
(ISPO–
Information Society Promotion Office) и финансирует исследовательские
программы по проблемам ЕИИ, подробное описание которых приведено в [1].
1.2. Инфокоммуникационные услуги и сети нового поколения
Технологической основой информационного общества является ГИИ,
которая
должна
обеспечить
недискриминационного
каждому
доступа
к
жителю
планеты
возможность
информационным
ресурсам.
Информационную инфраструктуру составляет совокупность баз данных,
средств обработки информации, взаимодействующих сетей связи и терминалов
пользователя. Доступ к информационным ресурсам в ГИИ реализуется
посредством
услуг
связи
нового
типа,
получивших
название
услуг
информационного общества или инфокоммуникационных услуг.
Инфокоммуникационная
предполагающая
услуга
автоматизированную
есть
услуга
обработку,
электросвязи,
хранение
или
предоставление информации по запросу с использованием вычислительной
техники как на входящем, так и на исходящем конце соединения [6].
Наблюдаемые
в
настоящее
время
высокие
темпы
роста
объемов
предоставления инфокоммуникационных услуг позволяют прогнозировать их
преобладание в сетях связи в ближайшем будущем. На сегодняшний день
11
развитие инфокоммуникационных услуг осуществляется, в основном, в рамках
компьютерной сети ИНТЕРНЕТ, доступ к услугам которой происходит через
традиционные сети связи. В то же время в ряде случаев услуги сети
ИНТЕРНЕТ,
ввиду
ограниченных
возможностей
ее
транспортной
инфраструктуры не отвечают современным требованиям, предъявляемым к
услугам
информационного
инфокоммуникационных
общества.
услуг
требует
В
связи
решения
с
этим
задач
развитие
эффективного
управления информационными ресурсами с одновременным расширением
функциональности сетей связи. В свою очередь, это стимулирует процесс
интеграции ИНТЕРНЕТ и сетей связи. К основным технологическим
особенностям,
отличающим
традиционных
сетей
инфокоммуникационные
связи,
можно
услуги
отнести
от
услуг
следующие.
Инфокоммуникационные услуги оказываются на верхних уровнях модели
взаимодействия открытых систем, в то время как услуги связи предоставляются
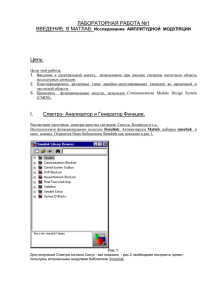
на третьем сетевом уровне. Чтобы предоставлять пользователям любые виды
услуг, имеющихся у оператора, в соответствии с рекомендацией Y-2011 [4]
необходимо создать распределенную систему, в которой функции организации
и предоставления интеллектуальных услуг были бы отделены от функций
управления транспортом и коммутацией, как показано на рис.1.1 [6]. Средства
обработки вызова и контроля будут сконцентрированы в одном месте, а
средства коммутации и транспорта будут распределены по всей территории
сети. При такой структуре у сетевых операторов появляется возможность
развития этих уровней независимо друг от друга, а у компаний, формирующих
информационные услуги и приложения – возможность значительно пополнить
рынок услугами и приложениями, которые могут быть востребованы
пользователями
сети
следующего
поколения.
Большинство
инфокоммуникационных услуг предполагает наличие клиентской и серверной
частей; клиентская часть реализуется в оборудовании пользователя, а серверная
– на специальном выделенном узле сети, называемом узлом служб.
12
Инфокоммуникационные услуги, как правило, предполагают передачу
информации мультимедиа, которая характеризуется высокими скоростями
передачи и несимметричностью входящего и исходящего информационных
потоков.
Уровень услуг
и приложений
Уровень управления
Уровень коммутации
и транспорта
Рисунок 1.1–Уровневая архитектура сети
следующего поколения
1.3.Широкополосные услуги в сетях нового поколения
Следуя
рекомендации
МСЭ
Y-2011[4]
Европейский
институт
стандартизации ETSI ввел понятие "широкополосных мультимедийных
услуг". Под такими услугами понимаются инфокоммуникационные услуги,
предоставление которых осуществляется на базе широкополосных сетей связи,
способных обеспечить перенос информации (контента) в виде непрерывных
потоков в режиме реального времени. К примеру, пользователь вправе
затребовать типичную услугу в таком составе [4, Приложение1]:
1.Телевидение высокой четкости HDTV ( 20 Мбит/с × 3 канала);
2.Видеофон (4 Мбит/с× 4 канала);
3.Услуги Internet( 20 Мбит/с);
4.Высококачественное аудиовещание ( 2 Мбит/с).
Итоговая цифровая скорость такой услуги составляет порядка 100Мбит/с.
13
1.4.Современные технологии широкополосного беспроводного доступа
Требования обеспечения передачи широкополосных услуг в сетях нового
поколения предъявляются в первую очередь к участку абонентского доступа. В
последнее время
у абонентов
приобретают популярность удобные в
пользовании методы беспроводного доступа. Типичным примером организации
такого доступа для мобильных абонентов является системы мобильной связи,
которые прошли в своем развитии ряд этапов [7]. В то же время, интенсивно
развиваются технологии беспроводного доступа для фиксированных обонентов
[8-10], позволяющие получить доступ к сети без громоздких проводных
соединений. К настоящему времени разработана обширная номенклатура
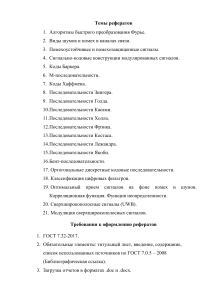
методов широкополосного беспроводного доступа. Среди них WiMAX–
технология, разработанная на основе стандарта IEEE 802.16. Существуют 2
разновидности WiMAX: фиксированный (802.16d) и мобильный(802.16e).
Средняя скорость передачи данных, кбит/с
БЕСПРОВОДНЫЕ ТЕХНОЛОГИИ
1000
Широкоп олосный
доступ
Сотовая связь
IMT-2000
100
LTE
Fixed WiMAX
10
HSPA
1
0,1
Mobile
WiMAX
EVDO Rev.A
UTRA-FDD
UTRA-TDD
EDGE
CDMA-2000
Рисунок 1.2–Эволюция беспроводных технологий
14
2.МОДЕЛИ КАНАЛОВ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ
2.1.Классификация замираний сигнала в системах радиосвязи
Интенсивное развитие систем беспроводной связи (мобильная радиосвязь,
системы беспроводного доступа к сети общего пользования и сети Интернет,
локальные компьютерные радиосети внутри зданий и др.) вызвало интерес к
изучению свойств и моделей каналов радиосвязи. В таких каналах в первую
очередь необходимо учитывать влияние многолучевости, причиной которой
является наличие многократных путей прохождения сигналов на трассе
распространения радиоволн. В диапазонах (1-10) ГГц сказываются отражения
от зданий, неровностей рельефа при организации связи на открытой местности,
отражения от стен и конструкций при связи внутри зданий. Сильные замирания
сигнала в канале затрудняют оценку переданных сообщений и приводят к
искажениям передаваемой информации. О роли замираний сигналов в общей
совокупности
проблем
помехоустойчивости
современных
телекоммуникационных систем можно судить по доле внимания к каналам с
замираниями в популярной монографии Б. Скляра [13, гл.15]. Мировое научное
сообщество откликнулось на появление новых задач разработкой методов
передачи информации по каналам беспроводной связи (т.н. методов
пространственно-временного
кодирования
(ПВК),
подробные
обзоры
которых опубликованы в статьях [14,15,16]. На основе этих революционных
методов
фирмы-производители
оборудования
беспроводного
доступа
стимулировали разработку стандартов IEEE 802.11, IEEE 802.16 и выпускают
на их основе оборудование под торговыми марками Wi-Fi и WiMAX [17,18],
которое сертифицировано для эксплуатации по всему миру. Развитие событий в
этой сфере показывает [18], что возможности методов ПВК далеко не
исчерпаны, как не исчерпаны возможности совершенствования методов
помехоустойчивого кодирования на путях продвижения к пропускной
способности канала. В частности, в диссертации [25] и в монографии [26]
15
приведены
сведения
о
новых
пространственно-временных
кодах,
превышающих по характеристикам помехоустойчивости коды автора метода
ПВК S.M Alamouti [20]. Опыт работы в этом направлении показывает, что для
разработки новых эффективных методов передачи по каналам с замираниями
крайне необходимо знание математической модели канала. В то же время,
как отмечалось в обзоре [15], многие статьи по тематике ПВК начинаются с
предположений о модели квазистационарных релеевских замираний. В
русскоязычной
литературе
предпринимались
попытки
систематизации
математических моделей каналов с замираниями [27]. Однако далее общих
рассуждений о многолучевости, почерпнутых из студенческих учебников по
теории связи и старых книг (1981-1984 гг.) о замираниях в КВ каналах, авторам
этой статьи продвинуться не удалось. Вместе с тем, исследовательская группа
разработчиков стандартов серии IEEE предприняла разработку моделей
каналов, на которые есть ссылки в обзоре [15]. Результаты исследований
представлены в виде стандарта IEEE [19]. Одновременно с этой работой
большая группа датских ученых под руководством K.I.Pedersen провела
экспериментальные исследования статистических характеристик беспроводных
каналов. Отчеты о результатах этих работ опубликованы в двух статьях [23,24].
В этом разделе обобщены опубликованные данные о статистических моделях
замираний сигналов в каналах систем беспроводного доступа и даны на этой
основе рекомендации по выбору математических моделей для проведения
компьютерного моделирования и последующих сравнительных испытаний
вновь разработанных методов передачи цифровой информации для систем
ПВК. Как известно, в идеализированной модели распространения радиосигнала
в свободном пространстве ослабление мощности переданного сигнала
определяется величиной потерь в свободном пространстве:
2
4d
L s (d )
.
(2.1)
Здесь d–расстояние между передатчиком и приемником, а –длина волны
радиосигнала.
Эта
формула
достаточно
точно
описывает
поведение
16
идеализированной системы радиосвязи, но не пригодна для описания реальных
систем.
Различают
три
основных
механизма,
воздействующих
на
распространение сигнала в реальных системах радиосвязи (Рис.2.1):
–Отражение
(refleсtion)
происходит
тогда,
когда
распространяющаяся
электромагнитная волна сталкивается с гладкой поверхностью, размер которой
гораздо больше длины волны радиочастотного сигнала .
–Диффракция (diffraction) встречается тогда, когда путь распространения
между передатчиком и приемником преграждается плотным телом, размеры
которого велики по сравнению с , что вызывает появление вторичных волн,
образующихся позади преграждающего тела. Диффракция (Рис.2.1) является
причиной того, что распространение радиочастотной энергии поисходит в
обход пути прямой видимости между передатчиком П и приемником Пр.
Препятствие
а)
б)
Пр
П
Рисунок 2.1–Картина многолучевого распространения
радиоволн:а)– диффракция;б)–лучи, отраженные от
местных предметов
17
Такое явление в литературе часто называют затенением (shadowing),
поскольку дифрагированное поле может достичь приемника, даже если оно
затенено непроницаемой преградой.
–Рассеяние (scattering) встречается тогда, когда радиоволна сталкивается с
любой неровной поверхностью или с поверхностью, размеры которой порядка
, что приводит к рассеянию энергии во всех направлениях. Все эти механизмы
распространения радиосигнала приводят в конечном итоге к появлению на
входе приемника множества интерферирующих сигналов (лучей). В таком
случае говорят о многолучевом распространении радиосигнала [22].
Неоднородная и случайная структура приходящих лучей порождает явление,
которое в литературе в целом именуется как замирания(fadings). Различают
дискретную многолучевость, когда на прием одновременно приходят
несколько явно выраженных лучей (каждый со своим запаздыванием) и
дисперсное распространение, когда на прием воздействует целый спектр
неявно выраженных лучей. Кроме того, выделяют случаи статической и
динамической многолучевости. Статическая многолучевость имеет место,
когда передающие и приемные антенны так же, как и все элементы трассы,
неподвижны. При этом картина поля предстает как бы застывшей. Если
перечисленные выше элементы движутся, то картина поля претерпевает
определенную динамику. Динамические свойства многолучевости следует
учитывать при анализе систем мобильной связи. Многолучевые каналы могут
быть классифицированы по характеру искажений сигналов, передаваемых по
этим каналам. Здесь важными являются такие характеристики сигналов:
длительность элементарной посылки сигнала Тs и ширина основной полосы
частот спектра сигнала ΔFs. Обычно эти характеристики соотносятся с
частотно-временными параметрами случайных замираний в канале. Если
величина ΔFs соизмерима с интервалом корреляции по частоте ΔFk, то
многолучевость приводит к изменениям коэффициента передачи канала,
примерно одинаковым для всех частотных составляющих сигнала. Для
динамического канала этот коэффициент передачи изменяется во времени
18
случайным образом, а для статического – остается постоянным во времени, но
принимает случайные значения от сеанса к сеансу. Замирания такого типа
именуются дружными [22]. В западной литературе принято использовать
термин flat fadings [15], что обычно преводится как плоские замирания. В
статическом случае плоские замирания не искажают форму сигнала, но в
динамическом случае за время длительности посылки сигнала коэффициент
передачи канала может существенно измениться, что приводит к искажению
формы сигнала. Это происходит тогда, когда длительность посылки Тs
превосходит интервал корреляции случайных замираний в канале ΔTk.
Тогда замирания называют быстрыми [22] (speed fadings[15]). Если же
(Тs<<ΔTk.) используют термин медленные замирания (slow fadings). При
медленных замираниях форма посылок не искажается. Для высоскоростной
связи типична ситуация, когда (ΔFs>ΔFk). При этом отдельные спектральные
компоненты сигнала замирают по разному, так что форма посылок
существенно искажается. Такие замирания называют селективными
(selective
fadings).
передаточная
При
функция
селективных
замираниях
канала K ( j) K ()e j ( ) :
искажается
в
сквозная
сквозной
АЧХ
K ( ) появляются участки неравномерности (вплоть до появления провалов,
подавляющих передачу соответствующих участков спектра сигнала), а форма
сквозной ФЧХ () претерпевает сушественные изменения, искажающие
фазовый спектр передаваемого сигнала. Многообразие причин появления
замираний в сочетании с параметрами сигнала порождает наборы различных
комбинаций: дружные замирания могут быть медленными и быстрыми,
селективные замирания также бывают медленными и быстрыми [22].
Перечисление возможных случаев на плоскости (время/частота) показано на
рис.2.2.
19
Тs
Быстрые селективные
замирания
Быстрые дружные
замирания
ΔTk
Медленные селективные
замирания
Медленные дружные
замирания
ΔFs
ΔFk
Рисунок 2.2– Классификация замираний
2.2. Важные характеристики замираний
На первых этапах развития радиосвязи единственным методом повышения
помехоустойчивости
передачи
в
каналах
с
замираниями
считалось
пространственное разнесение приемных антенн. Разнесение должно выбираться
таким
образом,
чтобы
вероятность
одновременных
замираний
всех
используемых сигналов была много меньше, чем какого-либо одного из них. В
теории приема замирающих сигналов устоялось мнение, что радикальным
методом борьбы с замираниями радиосигналов является разнесение приемных
антенн и лучшим методом объединения является оптимальное «весовое»
сложение принятых сигналов по критерию максимума отношения сигнал/шум.
Эта комбинация (разнесение/оптимальная обработка на приеме) оказалась
эффективной и давно стала привычной. Новый этап в теории методов передачи
20
информации по каналам с замираниям наступил с появлением работ, в которых
предлагались идеи пространственно-временного кодирования (ПВК). В статье
G. Foschini [28] предлагалось окружить среду многолучевого распространения
радиосигналов
множеством
передающих
и
приемных
антенн
и
соответствующим образом организовать передачу и обработку сигналов на
приеме (в терминах современной теории – применить адекватное кодирование).
Эта идея была быстро воспринята, но многим исследователям пришлось
отказаться от старых консервативных взглядов на математическую модель
канала радиосвязи. Появился новый термин MIMO (Multiple Input–Multiple
Output– множественный вход, множественный выход). Достаточно полный
перечень работ, опубликованных в западной печати по тематике MIMO дан в
обзоре[15]. Основная идея технологии MIMO иллюстрируется структурой на
рис.2.3. Передающая часть сиcтемы содержит M передатчиков (T1..TM) с
передающими антеннами, тогда как приемная часть содержит N приемников и
приемных
антенн
(R1..RN).
Считается,
что
замирания
порождаются
рассеивающей средой распространения радиосигнала H. Стрелками показано,
что сигнал любого из передатчиков Ti может достигать входа любого из
приемников (R1…RN), претерпевая замирания. Работа системы обеспечивается
мультиплексором на передаче, демультиплексором на приеме и приемником
максимального правдоподобия на приемной стороне.
H
s1
S
Мультиплексор
T1
Ti
si
hij
TM
SM
R1
r1
Rj
rj
RN
Приемник
МП
RN
Рисунок 2.3 – Обшая структура системы MIMO
21
Таким образом, вводится пространственная избыточность, благодаря которой
удается многократно «пронизать» турбулентную среду распространения
радиосигнала и избежать влияния замираний при соответствующей обработке
принятой совокупности сигналов. Говорят, что такая структура обеспечивает
передачу «от объема к объему» (from volume to volume). Это определение,
действительно,
подчеркивает
принципиальное
отличие
такой
объемно-
многомерной пространственной модели канала от привычной одномерной
модели, вытянутой в одну линию между передатчиком и приемником. Анализ
систем MIMO в значительной части публикаций из обзора [15] основан на
априорном
предположении,
что
такой
канал
квазистационарен
(по
терминологии[15] psewdostatic MIMO Channel), т.е. имеет место статическая
многолучевость на некотором, достаточно протяженном временном интервале.
Анализу статистических характеристик многолучевых каналов мобильной
связи посвящен специальный раздел монографии [13, Разд.15.2, рис.15.1], где
утверждается, что снижение отношения сигнал/шум в службах сотовой и
персональной связи в диапазоне (1-2) ГГц, обусловленное замираниями,
описывается моделью Релея. Длительное время динамические свойства
(«быстрая» динамическая нестационарность) замираний для мобильных
абонентов «гипнотизировали» исследователей систем MIMO. Достаточно скоро
пришло осознание того, что имеются все основания для фиксированых служб
канал типа MIMO считать квазистационарным, в котором передающая и
приемная стороны неподвижны и условия распространения радиоволн с
течением времени остаются прибизительно постоянными или не меняются
вообще. Специальные «пакетные» способы организации передачи информации
в
таких
квазистационарных
каналах
с
использованием
специальных
«обучающих» последовательностей описаны в обзоре [14]. Автор настоящего
пособия
задался
квазистационарности
беспроводного
целью
выяснить
моделей
доступа.
обоснованность
замираний
Углубленное
в
каналах
изучение
гипотез
о
фиксированного
энциклопедии
[17],
22
монографии[22], обзора[15], стандарта[19] и специализированных статей
[23,24] позволяют сделать следующие выводы:
1.Никаких
экспериментальных
исследований
о
поведении
процесса
статических замираний во времени не проводилось. Все соображения и
рассуждения о динамике замираний заимствованы из опыта дальней
коротковолновой радиосвязи и мобильной связи. В литературе отсутствуют
количественные данные о моделях поведения во времени сигналов в
системах фиксированного беспроводного доступа.
2.Для моделей каналов фиксированного беспроводного доступа в стандарте
IEEE 802.16a[19] считаются важными следующие характеристики:
–Потери распространения(Path loss), включая потери за счет затенения;
–Характеристики замираний (Fading characteristics).
2.3.Стандартизованные характеристики моделей замираний
В этом разделе приводятся сведения о характеристиках математических
моделей замираний, которые включены в стандарт [19] и опираются на
проведенные экспериментальные исследования [23,24].
Модель потерь распространения сигнала опирается на общепризнанные
результаты статей Y.Okumura[29] и M.Hata[30]. Эта эмпирическая модель
позволяет определить расчетным путем среднее снижение напряженности поля
PL (Path Loss-потери напряженности поля) по упрощенной формуле:
PL(dB)=A+10log10(d/d0)+S.
(2.2)
Здесь коэффициенты A=20log10(4πd/d0), =(A–Bhb+C/hb), hb–высота подвеса
базовой станции (10-80)м, d– расстояние, преодолеваемое радиосигналом,
опорное расстояние d0=100м. Значения коэффициентов A, В и С для различных
типов местности приведены в табл.2.2.
В формуле (2.2) S–ослабление сигнала за счет затенения. В монографии [22,
стр.193] приведены подобные расчеты, но формула (10.19) из этой монографии
оказывается более громоздкой.
23
Таблица2.2
Параметры модели (2.2)
Параметр модели
Холмистая
местность
с деревьями
средней высоты
Плоская
местность
с невысокой
растительностью
4,6
0,075
12,6
3,6
0,005
20
А
В
С
Статистические характеристики замираний описываются в виде модели,
учитывающей наличие в точке приема регулярной составляющей с амплитудой
А и случайной составляющей с дисперсией σ2. Плотность вероятности
результирующего сигнала r рекомендовано описывать райсовской функцией
плотности вероятности:
p( r )
r
( r 2 A 2 ) rA
exp
2 2 I 0 2 для r >0, A>0,
2
(2.3)
для других r, A.
p( r ) 0
Отношение мощностей регулярной и случайной составляющих принято
описывать коэффициентом K=A2/2σ2. При K=0 (регулярная составляющая
сигнала
отсутствует)
и
плотность вероятности
(2.3)
преобразуется
в
распределение Релея. В стандарте [19] рекомендуется ряд значений
коэфициента K=(0…16) в зависимости от высот подвеса антенн, погодных
условий (сезона), типа местности, и т.п.
Ослабление сигнала за счет затенения экспериментально изучено в
работе[23].
Установлено,
что
распределение
случайных
замираний
коэффициента передачи сигнала между любой парой передающая/приемная
антенна в структуре системы MIMO (рис.2.3) описывается плотностью
24
вероятности
лог-нормального
распределения(log-normal
distribution),
а
значения коэффициента передачи можно выразить как
hs= 10 σsZ/10,
где
дисперсия
(2.4)
σ2s=(6..10)dB,
Z–случайная
величина
с
гауссовским
распределением, нулевым средним и единичной дисперсией. Отмечается, что
формула (2.4) хорошо согласуется с экспериментальными данными. В
последнее время появились новые данные, уточняющие характеристики
моделей каналов, известные на момент подготовки обзора [15]. Следуя
тенденциям
развития
телекоммуникаций,
неправительственная организация
ведущая
международная
The Institute of Electric and Electronics
Engineers (IEEE) проводит исследования в форме организации Рабочих Групп
по перспективным направлениям. Соответственно, для разработки методов и
стандартов широкополосного беспроводного доступа организована Рабочая
Группа «IEEE 802.16 Working Group on Broadband Wireless Access»[19]. Работа
группы базируется на свободной добровольной основе. Любой может внести
свой вклад в рабочие документы группы, принимать участие в рабочих
заседаниях и в разработке итоговых документов, которые разрабатываются в
содружестве с Европейским Институтов Стандартов по телекоммуникациям
(ETSI) и Сектором стандартизации Международного Союза электросвязи
(ITU-T). По итогам работы этой Рабочей Группы опубликован текст стандарта
по характеристикам каналов беспроводной связи[19].
2.4.Особенности стандарта IEEE 802.16a
В разработке стандарта принимали участие ведущие мировые специалисты,
фамилии которых перечислены в списке авторов отчета [19]. Использованы
также
результаты
проекта
EURO-COST-231,
выполненного
в
2011г.
европейскими учеными по заказу Департамента исследований Европейского
Союза. Наибольший интерес представляют такие результаты.
25
Статистические характеристики замираний узкополосных (narrowband)
сигналов описываются в виде модели, учитывающей наличие в точке приема
регулярной составляющей с амплитудой А и случайной составляющей с
дисперсией
σ2.
Плотность
вероятности
результирующего
сигнала
r
рекомендовано описывать райсовской функцией плотности вероятности:
p( r )
r
( r 2 A 2 ) rA
exp
2 2 I 0 2 для r >0, A>0,
2
(2.5)
для других r, A.
p( r ) 0
Отношение мощностей регулярной и случайной составляющих сигнала в
западной литературе принято описывать коэффициентом K=A2/2σ2. В стандарте
802.16a приводится выражение для подсчета этого коэффициента
K=FsFhFbK0dv,
(2.6)
где:
Fs–«сезонный» множитель (летом Fs=1,зимой Fs=2,5);
Fh–коэффициент, учитывающий высоту подвеса антенн (Fh=(h/3)0.46, h–высота
подвеса приемной антенны в метрах);
Fb–коэффициент, учитывающий ширину диаграммы направленности приемной
антенны (Fb=(b/17)0.46 (b–в градусах);
K0,v–коэффициенты регрессии(K0=10, v= – 0.5);
d–расстояние в км.
Эмпирическая
формула
(2.6)
получена
на
основе
обработки
экспериментальных данных в диапазоне 1,9 ГГц при высоте передающей
антенны 20 м. Сатистика замираний зависит от погоды и местности (от
характера растительности и застройки). В стандарте много внимания уделено
местности типа «пригород» (suburban), типичной для сферы применения
беспроводного доступа в условиях западной цивилизации. Характерно, что в
обзорной
статье
[15]
приводятся
примеры
эмпирических
данных
по
коэффициенту K для двух крайних значений: K=16дБ (пример для пригорода
SU-1 с плотной застройкой и интенсивной растительностью); K=0дБ(пример
для пригорода SU-6 с низкими застройкой и растительностью).
26
Статистические характеристики допплеровского смещения частоты
несущей. Многолучевость оказывает влияние на характеристики смещения
частоты несущей, обусловленного относительным перемещением передатчика и
приемника (известного как эффект Допплера [13]). По модели, предложенной в
стандарте 802.16a в условиях многолучевости смещение частоты несущей
состоит из регулярного (fixed Doppler component) и случайного (scatter–
рассеянный) компонентов. Для оценок спектра допплеровского смещения fd
предложена эмпирическая формула
S ( f ) 1 1.72 f02 0,785 f 04 при f 0 1,
где нормированное значение допплеровского смещения f0
(2.7)
fd
,
f dm
fdm–максимальное смещение частоты несущей, обусловленое влиянием эффекта
Допплера, которое может быть расчитано по известной формуле [15] для
максимальных значений частоты сигнала и скорости перемещения. Формула
(2.6) хорошо согласуется с результатами исследований по проекту COST-207,
выполненного в Европе в рамках подготовки к внедрению сетей мобильной
связи третьего поколения.
27
3.МЕТОДЫ РАЗНЕСЕНИЯ В СИСТЕМАХ РАДИОСВЯЗИ
3.1.Классификация методов разнесения
В каналах радиосвязи, в частности, в каналах систем мобильной связи
действует комплекс помех и искажений. В первую очередь необходимо
учитывать влияние многолучевости в среде распространения радиоволн,
частотно-селективные замирания, сдвиги частоты и фазы несущей за счет
эффекта Допплера, а также интерференционные помехи от сигналов других
пользователей. Сильные замирания сигнала в канале затрудняют оценку
переданных сообщений и приводят к ухудшению качества передачи
информации. Традиционным методом повышения помехоустойчивости таких
систем является разнесение. В прежние годы сфера применения разнесенного
приема ограничивалась коротковолновой радиосвязью, где использовались
хорошо апробированные методы и техника. Идея разнесенного приема была
реализована еще в 1927 г. для организации радиотелефонной коротковолновой
связи. В 1931 г. разнесенный прием начал применяться в радиотелеграфной
связи. Впервые методы теории вероятностей к разнесенному приему были
применены в конце 30-х годов прошлого столетия. Потребовалось, однако, еще
15-20 лет для разработки основных теоретических положений статистической
теории разнесенного приема. В последнее время в связи с широким внедрением
систем сотовой и мобильной спутниковой радиосвязи потребовалось вернуться
к этой проблематике. Хотя общая идеология разнесенного приема осталась
прежней, изменились как характеристики каналов (переход в новые диапазоны
частот, прием сигналов в более сложных условиях переотражений, наличие
большого числа мешающих сигналов и т.д.), так и методы передачи сигналов
по радиоканалам. Не менее важным является и то, что появилась возможность
реализации более эффективных, но и более сложных методов разнесения.
Идея использования разнесения для борьбы с замираниями заключается
в совместном использовании на приеме нескольких сигналов, несущих
одну и ту же информацию, но пришедших различными путями. Разнесение
28
должно выбираться таким образом, чтобы вероятность одновременных
замираний всех используемых сигналов была много меньше, чем какого-либо
одного из них. Иными словами, эффективность разнесения тем выше, чем
менее коррелированны замирания в парциальных каналах.
Классический подход к реализации метода разнесения состоит в
использовании
одного
передатчика
и
нескольких,
разнесенных
в
пространстве приемных антенн с последующим весовым суммированием
либо автовыбором сигналов с целью повышения качества приема. В условиях
мобильной связи для участка «базовая станция – мобильный абонент» такая
реализация неприемлема, поскольку использование нескольких приемных
антенн
и
устройства
комбинирования
принимаемых
сигналов
делает
мобильную станцию громоздкой и дорогой. Однако, возможна организация
разнесенных каналов за счет использования нескольких разнесенных антенн
на передаче (на базовой станции). Базовая станция обслуживает сотни и
тысячи мобильных абонентов и более целесообразно усложнение аппаратуры
небольшого числа базовых станций, нежели множества мобильных терминалов.
При этом на участке «мобильный абонент – базовая станция» может
осуществляться прием на те же разнесенные антенны базовой станции, но
работающие в режиме приема. В некоторых существующих сотовых системах
уже используются на базовых станциях две приемные антенны для
разнесенного приема. Эти же антенны могут быть использованы для
разнесенной передачи.Поскольку причиной замираний сигнала является
многолучевое рспространение сигнала в радиоканале разнесение остается
главным
способом
повышения
помехоустойчивости
передачи
информации. В зависимости от характера замираний сигнала в канале могут
быть использованы следующие методы разнесения (Рис. 3.1):
1.Разнесение во времени (Time Diversity). На первых этапах внедрения
радиосвязи для передачи данных было установлено, что замирания приводят к
пакетированию ошибок. Известные к тому моменту коректирующие коды
эффективно исправляли случайные и независимые ошибки и не годились для
29
исправления пакетов ошибок. Были разработаны
специальные классы
корректирующих кодов, ориентированные на исправление пакетов ошибок
(т.н.диффузные коды, коды Рида-Соломона и др.). Применялись также методы
перемежения для изменения структуры пакетов ошибок и декорреляции
символов ошибок в пакетах с последующим их исправлением стандартными
кодами для независимых ошибок. Перечисленные методы оказываются не
эффективными и в настоящее время не применяются.
2.Разнесение в пространстве (Space Diversity) оказалось жизнеспособным
методом и в настоящее время является лидирующим в каналах с замираниями,
который успешно сочетается с иными методами. Увеличение числа приемных и
передающих антенн способствовало декорреляции принимаемых сигналов.
Разнесение
должно
выбираться
таким
образом,
чтобы
вероятность
одновременных замираний всех принимаемых сигналов была много меньше,
чем какого-либо одного из них. Иными словами, эффективность разнесения тем
выше, чем менее коррелированны замирания в парциальных каналах.
Исторически первыми были освоены методы передачи с одной передающей
антенной и несколькими разнесенными в пространстве приемными антеннами
(2 приемных антенны–сдвоенный прием; 3 приемных антенны–строенный
прием и т.д.). Дальнейшим развитием метода пространственного разнесения
является метод многоантенной радиосвязи, именуемый в литературе как
MIMO–(Multiple Input-Multiple Output). Метод MIMO оказался эффективным и в
настоящее время успешно сочетается с иными методами.
3.Разнесение по поляризации и углам прихода лучей(Angle/Direction
Diversity) требует применения специальных кострукций приемных антенн.
Поэтому этот вариант пространственного разнесения на практиве редко
используется.
4.Разнесение по частоте (Frequency Diversity) по своей природе должно
применяться в частотно-селективных каналах. Методы частотного разнесения
основаны
на
использовании
широкополосных
сигналов,
содержащих
избыточность. Обработка этих сигналов на приеме позволяет использовать
30
энергию участков спектра, не пораженных замиранием, для восстановления
передаваемой информации. Типичным здесь является использование в качестве
переносчиков широкополосных псевдослучайных сигналов (в системах CDMA)
с обработкой приемниками типа RAKE для разделения лучей. В последних
вариантах
реализации
методов
частотного
разнесения
используются
широкополосные многочастотные сигналы, составленные из параллельного
набора ортогональных поднесущих OFDM (Orthogonal Frequency Division
Multiplexing), покрывающих весь частотный интервал замирающего сигнала.
Комбинации перечисленных методов образуют новые гибридные методы
разнесения:
–Пространственно-временное кодирование (ПВК), при котором канал с
пространственным разнесением кодируется внешним помехоустойчивым
кодом.
–Метод пространственно-частотного разнесения MIMO/OFDM, в котором
сочетаются преимущества пространственного и частотного разнесения.
Реализация метода MIMO требует передачи специальных «обучающих»
(traning) сигналов, предназначенных для оценки параметров замираний в
канале с последующей оптимальной обработкой принятых сигналов. В
последние годы предложены новые т. н. «дифференциальные» методы
передачи информации по каналам с замираниями, при которых информация
закладывается в разность информационных параметров двух соседних
сигналов.
Дифференциальные методы пригодны для передачи информации по каналам,
параметры которых остаются неизменными на протяжении, по крайней мере,
двух соседних сигналов. При этом, как и во всех дифференциальных методах,
предыдущий сигнал служит опорным («обучающим»), используемым для
извлечения информации на основе сравнения данного сигнала с предыдущим.
В следующем разделе подробно рассмотрен один из перечисленных методов
борьбы с замираниями–пространственно-временное колирование.
31
МЕТОДЫ РАЗНЕСЕНИЯ В КАНАЛАХ С ЗАМИРАНИЯМИ
Разнесение
Разнесение
в пространстве
по частоте
Коды,исправляющие пакеты ошибок
Разнесенный
прием
Разнесение
во времени
OFDM
MIMO
широкополосные
многочастотные
сигналы
методы
многоантенной
радиосвязи
STC
MIMO-OFDM
пространственновременное
кодирование (ПВК)
методы
пространственно-частотного
разнесения
Дифференциальные методы модуляции/кодирования:
DSTC-Differerntial Space Time Coding(Дифференциальное
пространственно-временное кодирование),
DDSTBC-Double differential space-time block coding(Двойное
дифференциальное пространственно-временное блоковое кодирование)
Рисунок3.1 –Классификация методов разнесения
3.2. Пространственно-временное кодирование в системах
беспроводной связи
Помехоустойчивость приема разнесенных сигналов зависит от метода их
объединения
(комбинирования)
на
приеме.
Все
известные
методы
комбинирования подразделяются на три группы:
1.Весовое сложение сигналов отдельных ветвей по критерию максимума
отношения сигнал/шум на выходе схемы сложения;
2.Автовыбор канала с наибольшим отношением сигнал/шум;
32
100
10-1
Без разнесения
10-2
3.Линейное
сложение
сигналов
парциальных
каналов.
Весовое
сложение
дает
наилучшую
10-3
помехоустойчивость,
10-4
10-5
-6
10-10
С разнесением
10
как
линейное сложение более просто
P0
0
тогда
20
30
40
ОСШ, дБ
реализуется.
60
помехоустойчивость
разнесенного
приема
также
50
Рисунок 3.2 – Помехоустойчивость
разнесенного приема
70
Кроме
зависит
используемого
того,
от
метода
детектирования. На рис.3.2 приведены результаты расчетов вероятности
ошибки приема двоичных символов P0 при двухканальном разнесенном приеме
сигналов минимальной частотной модуляции MSK в каналах с релеевскими
замираниями и весовым сложением принимаемых сигналов. В интересной для
практики области вероятностей ошибки (10–5…10–6) энергетический выигрыш
за счет разнесения на приеме составляет 20 – 25 дБ.
Как отмечалось выше, известны методы разнесения, при которых
параллельные каналы формируются при передаче. Рассмотрим эти методы
более подробно.
На рис.3.3 представлена базовая структура классической системы
передачи сигналов по каналам с замираниями с двумя ветвями разнесения на
приеме. Используется комбинирование сигналов по критерию максимального
отношения сигнал/помеха.
Сигнал
S0
посылается
передатчиком
через
передающую
антенну.
Передаточные функции каналов включают учет влияния цепей на передающей
и приемной стороне, искажения сигналов в радиоканале и моделируются
функциями следующего вида:
h0 0 e j0 ,
h1 1e j1 ,
33
где: 0, 1 – модули передаточных функций на участке «передающая антенна –
приемная антенна» (приемные антенны с номерами 0 и 1, соответственно).
На входах приемников действуют аддитивные смеси принимаемых сигналов
h0 s0 , h1s0 и шумов совместно с интерференцией n0 (n1, соответственно):
r0 h0 s 0 n0 ,
(3.1)
r1 h1 s1 n1 .
S0
h0=α0ejΘ0
n0
h1=α1ejΘ1
n1
Интерференция
+ шум
Устр-во
оценки
канала
h0 ĥ0
Ŝ0
r1=s0h1+n1
ĥ1 h1
Устр-во
оценки
канала
Детектор
МП
Рисунок 3.3 – Передача сигналов по каналам с
замираниями и разнесением приемных антенн
Полагая, что аддитивные помехи n0 и n1 распределены по гауссовскому
закону,
можно
сформулировать
в
общем
виде
решающее
правило
максимально правдоподобного приема сигнала si:
d 2 ( r0 , h0 , si ) d 2 (r1 , h1 , si )
d 2 (r0 , h0 , s k ) d 2 (r1 , h1 , s k ),
i k,
(3.2)
где d 2 ( x, y) есть евклидово расстояние между x и y. Вычисление (3.2) приводит
к следующему результату:
( 02 12 ) si
2
~
s0 si* ~
s 0* si
( 02 12 ) s k
2
~
s0 s k* ~
s 0* s k , i k .
(3.3)
34
Для сигналов с одинаковыми энергиями (например, сигналов с ФМ)
выражение (3.3) упрощается:
d 2 (~
s0 s i ) d 2 (~
s0 s k ), i k .
(3.4)
S0
–S1*
S1
Перед.
антенна 0
h0=α0ejΘ0
Перед.
антенна 1
S0*
h1=α1ejΘ1
Приемн.
антенна
n0
Интерференция
n1
h0
Устр-во
оценки
канала
h0
h1
h1
Устр-во
объединения
сигналов
Ŝ0
Ŝ1
Детектор
МП
Рисунок 3.4– Передача сигналов с
разнесением передающих антенн
Детектор максимального правдоподобия (рис.3.3) работает по правилу(3.4).
На рис.3.4 представлена структура системы, в которой функции разнесения
реализованы на передающей стороне. На приемной стороне используется
одна антенна и реализуется решающее правило приема по максимуму
правдоподобия. Передача сигналов организована следующим образом (см.
табл. 3.1). В момент времени t через антенну с номером 0 передается сигнал s0,
а через антенну с номером 1 – сигнал s1.
В следующий момент t + T передается, соответственно, сигнал s1* и s 0*
(* – знак комплексного сопряжения).
35
Таблица 3.1
Порядок передачи символов
Время передачи
антенна антенна 1
0
Момент t
s0
s1
Момент t + T
s1*
s 0*
Предполагается, что условия замираний остаются неизменными на
интервале двух соседних символов, т. е.
h0 (t ) h0 (t T ) 0 e j0 , h1 (t ) h1 (t T ) 1e j1 .
(3.5)
Принимаемые сигналы могут быть выражены следующим образом:
r0 r (t ) h0 s0 h1s1 n0 ;
r1 r (t T ) h0 s1* h1s0* n1.
(3.6)
Формируемые на приеме оценки сигналов (см. рис. 3.4) определяются как:
~
s0 h0* r0 h1r1* ;
~
s1 h1* r0 h0 r1* .
(3.7)
С учетом этого получаем
~
s0 ( 02 12 ) s0 h0*n0 h1n1* .
(3.8)
Нетрудно убедиться в том, что решающее правило совпадает с таким же
правилом для схемы с разнесением на приеме, причем поворот фазы в шумовом
компоненте не влияет на величину отношения сигнал/шум. Следовательно, по
помехоустойчивости схемы с разнесением на приеме (рис. 3.3) и разнесением
на передаче (рис.3.4) эквивалентны.
Результаты моделирования различных вариантов описанных выше систем
разнесения показаны на рис.3.5. Рассмотрены варианты разнесения только на
передаче, только на приеме и одновременное разнесение передающих и
приемных антенн.
36
100
10–1
10
1
–2
10–3
2
4
10–4
10–5
P0
3
5
5
10
15
ОСШ, дБ
20
25
30
35
40
45
50
Рисунок 3.5 – Сравнение помехоустойчивости
методов разнесения
На рисунке 3.5 кривые обозначены:
1 – передача без разнесения;
2 – одна передающая антенна, две приемных антенны;
3 – одна передающая антенна, четыре приемных антенны;
4 – две передающих антенны, одна приемная антенна;
5 – две передающих антенны, две приемных антенны.
Моделирование подтверждает высокую эффективность разнесения как на
приеме, так и на передаче. Наилучшие результаты получены для сочетания
разнесения на передаче и на приеме.
Используемые во многих современных системах передачи информации
методы корректирующего кодирования реализуют, по существу, разнесение
во времени. При одноканальной передаче (одна передающая и одна приемная
антенны) пакет ошибок можно трактовать как результат действия сильного
замирания сигнала. Даже короткие блоковые либо сверточные коды в
сочетании с эффективными перемежителями позволяют исправлять достаточно
длинные пакеты ошибок в каналах. Поэтому сочетание рассмотренных в
предыдущем разделе методов разнесения и методов корректирующего
кодирования вполне целесообразно.
Идеи пространственно–временного кодирования (ПВК) возникли на базе
результатов и как развитие методов разнесения на передаче. По существу,
простейший короткий блоковый код уже был представлен выше в табл.3.1,
которую можно трактовать как кодовую таблицу. При традиционном
37
корректирующем
кодировании
вводится
избыточность
во
временной
области. В системах с ПВК вводится избыточность и в пространственной
области, образованной несколькими приемными и передающими антеннами
(рис.3.6). При ПВК возможно получение дополнительного выигрыша за счет
усложнения методов передачи и обработки сигналов на приеме.
C1
r1
Кодер ПВК
Источник
информации
Приемник
CN
Ŝ
rM
Рисунок3.6 – Модель системы с пространственно временным кодированием
На рис. 3.7 представлен простой пример кодера на передаче, конфигурации
сигнального созвездия и решетчатой диаграммы ПВК.
5
а)
б)
2
С1
D
3
1
4
С2
0
5
6
7
1
в)
0
1
2
3
4
5
6
7
C00
N 01 02 03 r04
M 05 06 07
50 51 52 53 54 55 56 57
20 21 22 23 24 25 26 27
70 71 72 73 74 75 76 77
40 41 42 43 44 45 46 47
10 11 12 13 14 15 16 17
60 61 61 63 64 65 66 67
30 31 32 33 34 35 36 37
Рисунок 3.7 – Кодер (а), сигнальное созвездие
(б) и решетчатая диаграмма (в) ПВК
38
Кодирование производится в алфавите алгебраического кольца Z(8)
(кольцо целых чисел с операциями сложения и умножения по модулю 8).
Порождающие многочлены кодера ПВК отыскиваются на основе перебора по
критерию максимизации энергетического выигрыша в канале с замираниями.
Количество передающих и приемных антенн N=M=2. Выходы кодера С1 и С2
подключены
к
соответствующим
входам
передатчиков
разнесенных
передающих антенн. С целью повышения удельной скорости передачи
информации
в
модуляторах
используется
фазовая
модуляция
ФМ-8.
Соответствующее сигнальное созвездие показано на рис.3.7б. Число состояний
ПВК определяется структурой кодера и равно S=8. Порождающие многочлены
кодера в восьмеричной форме записи имеют вид (5D, 1) ( код с единичной
памятью). Один шаг решетчатой диаграммы ПВК (рис.3.7в) содержит наборы
предыдущих и последующих состояний (1…7) и соединяющих их ветвей.
Каждая ветвь маркируется парой символов на выходе кодера С1С2. В правой
части диаграммы показаны строки с парами символов, маркирующими ветви,
выходящие из конкретного состояния в порядке их перечисления сверху вниз.
К примеру, пара символов (С1,С2) = (5,2), расположенная во второй строке на
втором месте слева маркирует ветвь, соединяющую предыдущее состояние «1»
с последующим состоянием «2». Предполагается, что обработка сигналов на
приеме производится путем декодирования по решетке ПВК на основе
алгоритма Витерби. На рис.3.8 приведены результаты моделирования ПВК в
канале с замираниями.
10-1
10-2
Некодир. передача
-3
10
1 антенна
2 антенны
10-4
Θр
Θк
10-5
4 антенны
P0
ОСШ, дБ
-6
10
5
10
15
20
25
30
35
Рисунок 3.8 – Помехоустойчивость ПВК
40
39
При использовании одной антенны на передающей и одной антенны на
приемной стороне величину Θк можно трактовать как энергетический
выигрыш за счет помехоустойчивого кодирования.
Увеличение количества передающих антенн (2 либо 4 антенны) при одной
приемной антенне дает дополнительный выигрыш Θр за счет разнесения на
передаче.
Методы
большой
гибкостью
пространственно-временного
и
позволяют
кодирования
применять
различные
обладают
методы
помехоустойчивого кодирования, в том числе и эффективные недвоичные коды
Рида–Соломона. В сочетании с сигнальными созвездиями с плотной укладкой
сигнальных точек применение ПВК обеспечивают не только высокую
помехоустойчивость, но и высокую удельную скорость передачи информации
по каналам с ограниченной полосой частот. К примеру, использование
созвездия КАМ-16, ПВК с 16 состояниями в системе с двумя передающими и
двумя приемными антеннами достигается скорость передачи 74,4 Кбит/с с при
ОСШ, равным 16 дБ. Эта скорость в 2,6 раза выше скорости передачи в системе
на базе стандарта IS-136 (28,8 Кбит/с).
40
4.МЕТОДЫ РАЗНЕСЕННОГО ПРИЕМА
В КАНАЛАХ С ЗАМИРАНИЯМИ
4.1. Введение
В прежние годы сфера применения разнесенного приема ограничивалась
коротковолновой радиосвязью, где использовались хорошо апробированные
методы и техника. Идея разнесенного приема была реализована в 1927 г. для
организации радиотелефонной коротковолновой связи. В 1931 г. разнесенный
прием начал применяться в радиотелеграфной связи. Впервые методы теории
вероятностей к разнесенному приему были применены в конце 30-х годов.
Потребовалось, однако, еще 15-20 лет для разработки основных теоретических
положений статистической теории разнесенного приема.
Идея применения разнесения для борьбы с замираниями заключается в
совместном использовании на приеме нескольких сигналов, несущих одну и ту
же информацию, но пришедших различными путями. Разнесение должно
выбираться таким образом, чтобы вероятность одновременных замираний всех
используемых сигналов была много меньше, чем какого-либо одного из них.
Иными
словами,
эффективность
разнесения
тем
выше,
чем
менее
коррелированны замирания в парциальных каналах. Классический подход к
реализации метода разнесения состоит в использовании одного передатчика и
нескольких, разнесенных в пространстве приемных антенн с последующим
весовым суммированием либо автовыбором сигналов с целью повышения
качества приема. В следующем разделе на основе зарубежных публикаций
приведены классификация и анализ различных методов разнесения на приеме с
целью повышения помехоустойчивости передачи дискретной информации по
каналам с замираниями.
41
4.2.Методы комбинирования и коммутации при разнесенном
приеме
Известно несколько методов комбинирования некоррелированных сигналов
при разнесенном приеме, которые классифицируются по следующим
категориям:
1.Оптимальное
сложение
по
критерию
максимального
отношения
сигнал/помеха.
2.Сложение с равными весами
3.Автовыбор.
При
когерентной
последетекторного
демодуляции
сложения
характеристики
оказываются
додетекторного
одинаковыми.
Однако
и
при
некогерентной демодуляции цифровых ЧМ сигналов, осуществляемой с
помощью
дискриминатора
или
автокорреляционного
демодулятора,
характеристики додетекторного и последетекторного сложения оказываются
различными [49]. На рис. 4.1 приведены структурные схемы, иллюстрирующие
методы додетекторного комбинирования. При идеальной реализации метод
оптимального
додетекторного
сложения
обеспечивает
максимальное
улучшение характеристик помехоустойчивости по сравнению с другими
методами. Однако, для его реализации требуются блоки фазирования, весовой
обработки и сложения (рис.4.1a), что существенно усложняет конструкцию.
Структурная схема, иллюстрирующая метод сложения с равными весами,
изображена на рис. 4.1б. Она во многом схожа со схемой оптимального
сложения за исключением того, что в ней отсутствуют блоки весовой
обработки. Улучшение характеристик помехоустойчивости, обеспечиваемое
сложением с равными весами, по сравнению с оптимальным сложением,
оказывается несколько меньше, поскольку помехи и шум, искажающие сигнал
и содержащиеся в «зашумленных» ветвях разнесения, могут суммироваться с
«чистыми» сигналами ветвей разнесения, не содержащими помех. Для ОВЧ,
УВЧ и микроволновых систем подвижной радиосвязи методы оптимального
сложения и сложения с равными весами представляются малопригодными. Это
42
связано с трудностями реализации блока фазирования, обеспечивающего
необходимую точность и устойчивость характеристик сложения в условиях
замираний из-за многолучевости, порождающих быстрые случайные изменения
фазы. По сравнению с этими двумя методами комбинирования метод
автовыбора
в
силу
простоты
реализации
представляется
более
приспособленным для применения в системах подвижной радиосвязи. Согласно
этому методу всякий раз выбирается наилучшая ветвь разнесения, т.е. ветвь с
максимальным уровнем сигнала (см. рис.4.1в). Кроме того, устойчивая работа
здесь может быть обеспечена даже в условиях быстрых замираний. По
сравнению с предельным улучшением характеристик помехоустойчивости,
обеспечиваемым оптимальным сложением, их улучшение при автовыборе
оказывается несколько меньше. Главный недостаток этого метода состоит в
том, что при его реализации требуется столько приемных каналов с
непрерывным контролем, сколько организовано ветвей разнесения. Этого
недостатка лишены приемники с переключением или сканированием.
На рис. 4.2 приведены структурные схемы подобных приемников. В схеме,
изображенной на рис.4.2a, переключение ветвей разнесения происходит всякий
раз, когда уровень сигнала оказывается ниже порога. Порог может
устанавливаться фиксированным только для небольшой области обслуживания,
но он не является наилучшим для всей области.
Поэтому уровень порога должен адаптивно подстраиваться при перемещении
подвижного объекта, как показано на рис. 4.2б.
43
Антенна
Блок
фазирования
Приемник
Детектор
Антенна
Детектор
Детектор
Приемник
а)
Антенна
Блок
фазирования
Приемник
Детектор
Антенна
Приемник
б)
Антенна
Приемник
Компаратор
Антенна
Коммутатор
Детектор
Приемник
в)
Рисунок 4.1 – Структуры методов комбинирования сигналов при разнесенном
приеме: а – оптимальное сложение; б – сложение с равными весами; в – автовыбор
44
Улучшение
характеристик
помехоустойчивости,
достигаемое
при
использовании метода переключения, зависит от точности установки порога,
временной задержки в цепи обратной связи, необходимой для выполнения
контроля, оценивания, принятия решения и осуществления переключения.
Антенны
Коммутатор
Приемник
Компаратор
Детектор
Порог (фиксированный)
а)
Антенна
Антенна
Коммутатор
Приемник
Компаратор
Детектор
Блок
оценивания
б)
Рисунок 4.2 – Методы автовыбора с фиксированным (а) и переменным (б) порогами.
Хотя метод автовыбора с фиксированным порогом проще при реализации и
характеризуется большим быстродействием, но невозможно выбрать значение порога,
оптимальное для всей области обслуживания. Введение обратной связи решает эту
проблему, но может вызвать искажение огибающей и фазы.
На рис.4.3 приведена структура простой реализации метода переключения,
в которой выбор ветви разнесения производится периодически с помощью
автономного генератора. Эффективность этого метода в условиях воздействия
теплового шума и соканальной помехи экспериментально подтверждена.
Улучшение характеристик помехоустойчивости при воздействии помехи по
соседним
каналам
может
быть
ограничено,
поскольку
периодическое
переключение, производимое в ВЧ тракте, может вызвать в процессе свертки
перенос помехи в полосу основного канала приема. Однако эта проблема может
быть разрешена путем увеличения избирательности приемника по соседнему
45
каналу
приема.
Другим
эффективным
вариантом
реализации
метода
переключения с одним приемником является метод фазового сканирования,
который иллюстрируется структурной схемой, изображенной на рис.4.3. Если
частота сканирования превышает удвоенную наивысшую модулирующую
частоту, то может быть достигнут тот же эффект улучшения характеристики
помехоустойчивости, который обеспечивается методом переключения.
Антенна
Антенна
Коммутатор
Приемник
Детектор
Генератор
Рисунок 4.3 – Структура метода периодической коммутации. Здесь ветви разнесения
периодически выбираются с помощью автономного генератора. Этот метод
целесообразно использовать в низкоскоростных системах с большой девиацией
частоты, где искажения фазы могут быть легко устранены.
Представляет интерес метод частотного разнесения, структура которого
изображена на рис. 4.4. Метод оказывается полезным, так как он обеспечивает
такое же улучшение характеристик помехоустойчивости, как и метод фазового
сканирования. Этот метод становится еще более привлекательным, когда
имеется несколько ветвей разнесения. Метод переключения или автовыбора в
том виде, как он представлен на рис.4.1в, наиболее часто используется в
системах радиосвязи.
Антенна
f0 – f
Антенна
f0 + f
Рисунок 4.4 – Структура метода частотного разнесения
Детектор
46
4.3.Улучшение характеристик несущая/шум, несущая/помеха
Улучшение характеристик помехоустойчивости приема, обеспечиваемое
различными методами приема, оценивается уменьшением минимального
значения отношения несущая/шум (C/N) и несущая/помеха (C/I), при которых
обеспечивается заданное значение вероятности ошибки р . Например, согласно
рис.4.5 для достижения р=10-4 требуется, чтобы при отсутствии разнесения C/N
было равно 20 дБ, а при двукратном оптимальном сложении 22 дБ.
Ниже рассмотрены системы додетекторного двукратного комбинирования. Эти
системы представляются весьма эффективными. Рассмотрим статистические
характеристики C/N и C/I в релеевском канале без разнесения.
1
–
–
Среднее значение р
10-1
–
Когерентная демодуляция
Автокорреляционная
демодуляция
Демодуляция с помощью
дискриминатора
10-2
10-3
Без разнесения
Оптимальное
сложение
10-4
10-5
10-6
-10
0
10
20
30
40
50
60
70
Среднее значение отношения несущая /шум Г, дБ
Рисунок 4.5 – Зависимость усредненной вероятности ошибки от среднего
значения отношения несущая/шум при приеме MSK и QPSK сигналов в
условиях
воздействия
квазистатических
релеевских
замираний.
Использовалось двукратное разнесение с оптимальным додетекторным
сложением
47
Так как мгновенное значение C/N, обозначенное , есть квадрат огибающей
сигнала, распределенной по закону Релея, то функция плотности распределения
вероятностей (ФПРВ) случайной величины ( ) представляет собой
экспоненциальный закон распределения
p
1 - /Г
e
,
(4.1)
где Г– среднее значение .
Мгновенное значение C/I, обозначенное , есть отношение статистически
независимых квадратов огибающих сигнала и помехи, распределенных по
закону Релея. ФПРВ случайной величины () представляет собой
распределение
p
2
,
(4.2)
где – среднее значение .
Пусть i (i = 1,2) – мгновенное значение C/N в каждой ветви разнесения, а
– мгновенное значение C/N на выходе схемы комбинирования. В этом случае
три метода комбинирования могут быть описаны следующим образом:
= 1 + 2 для оптимального сложения;
(4.3)
1 / 2 2 / 2 для сложения с равными весами; (4.4)
1, 1 2 ;
для автовыбора.
2, 2 1
(4.5)
Предположим, что сигналы различных ветвей разнесения являются
статистически независимыми, их огибающие имеют релеевское распределение
с одинаковой дисперсией, т.е. Г1 = Г2 = Г, где Гi (i = 1,2) – среднее значение i (i
= 1,2). Тогда ФПРВ для трех методов комбинирования могут быть записаны в
следующем виде:
48
p
p
2
e - /Г
3
2
для оптимального сложения;
(4.6)
для сложения с равными весами;
(4.7)
2
d
1 e / 2 2 для автовыбора.
d
(4.8)
4 2
p
Приближения справедливы при << Г. Вероятность потери связи
определяется как вероятность того, что не превысит наперед заданного
значения s:
s
P[ s] = p( )d .
0
(4.9)
На рис.4.6 приведены кривые, вычисленные согласно (4.9) при
подстановке (4.1) и (4.6,4.7 и 4.8). Из приведенных зависимостей следует, что за
счет разнесения может быть существенно снижен динамический диапазон ,
причем различие в степени улучшения характеристик помехоустойчивости,
обеспечиваемого различными методами комбинирования, включительно.
Следуя методике, изложенной в [49], можно получить следующие выражения
для ФПВР величины :
d
для оптимального сложения;
d
(4.10)
d
для сложения с равными весами;
d ( 3 / 2)
(4.11)
p() =
p()
p() =
2
( )
2
2
2
( 2 )
для автовыбора.
(3.12)
49
99,99
99,9
99,9
99
Р [ s], %
95
90
80
70
60
50
40
30
20
10
5
Без разнесения
1
Оптимальное сложение
0,1
Автовыбор
0,01
- 40
- 30
- 20
-10
s/Г, дБ
0
10
Среднее значение C/N
Рисунок 4.6– Интегральная функция распределения отношения
сигнал/шум (Г – среднее значение отношения сигнал/шум в каждой
ветви разнесения; s – фиксированное значение )
Далее предполагается идеальное функционирование блока фазирования с
пилот-тоном в схемах оптимального сложения и сложения с равными весами, а
в схеме автовыбора – блока выбора ветви с максимальной мощностью
полезного сигнала. Взаимная корреляция полезных сигналов и помех,
присутствующих в двух ветвях разнесения, не учитывалась. Кроме того,
полагалось равенство средних значений C/I в различных ветвях разнесения, т.е.
1 = 2 = :
s
P s 0 p d.
(4.13)
Значения вероятности потери связи изображены на рис. 4.8. Из
приведенных зависимостей следует, что динамический диапазон при
разнесении может быть существенно уменьшен, причем различие в степени
улучшения характеристик помехоустойчивости, обеспечиваемое различными
методами разнесения, оказывается незначительным.
50
50
40
30
20
Р [ s ], %
10
5
1
Без разнесения
Оптимальное сложение
0,1
Автовыбор
0,01
- 50
- 40
- 30
- 20
s/, дБ
-10
0
Среднее значение C/N
Рисунок 4.7 – Интегральная функция распределения отношения
сигнал/шум ( – среднее значение отношения сигнал/шум в
каждой ветви разнесения; s – фиксированное значение )
4.4.Улучшение характеристик помехоустойчивости
Далее приводится анализ влияния двукратного додедекторного разнесения
на снижение усредненной вероятности ошибок при приеме ЧМ сигналов
системах подвижной радиосвязи в условиях воздействия неселективных
квазистатических релеевских
замираний.
Аналогичным образом можно
рассматривать системы с другими, более совершенными видами модуляции и
схемами разнесения.
4.5.Зависимость средней вероятности ошибки р от отношения
несущая/шум
Рассмотрим сначала ситуацию, когда ACI можно пренебречь. Будем
полагать, что используется метод двукратного комбинирования путем
идеального автовыбора. Обозначим зависимость усредненной р от C/N в
системах с разнесением и без разнесения соответственно через р(2) (Г) и р(1)(Г).
Тогда согласно (4.1) и (4.2) можно записать:
51
d
1 e / d ;
d
1
e1 e e - / Г d ,
0
e2 e
0
(4.14)
(4.15)
где Ре () – зависимость Ре от C/N в канале без замираний. Легко показать, что
Ре(2)(Г) и Ре(1)(Г) связаны следующими соотношениями:
е2 2е1 е1 / 2.
(4.16)
Для оптимального сложения с помощью(4.3) может быть получено
соотношение
р 2 2р 1
1
р1 . .
1 /
(4.17)
Эти соотношения могут быть обобщены на случай L- кратного разнесенного
приема.
Используя выражения, полученные в [49], и выражение p(1)(Г) при
демодуляции ЧМ сигналов без разнесения, получаем
1
7
р1 1
2
1 4 / 3 12
при демодуляции с помощью дискриминатора;
е1
(4.18)
1
1
1
2 1 2
при автокорреляционной демодуляции.
(4.19)
1
1
р 1 1
2
1 4
при когерентной демодуляции.
(4.20)
Подставляя (3.18-3.19) в (3.17) получаем выражение для Ре(2)(Г) в случае
автовыбора:
52
11
1
р 2 1
2
1 4 / 3 2(Г 8/3) 8 2
при демодуляции с помощью дискриминатора;
(4.21)
е2
1
1
2
1 2
при автокорреляционной демодуляции;
е2
(4.22)
1
3
1
2
1
2 4 2
при когерентной демодуляции.
(4.23)
Аналогичным образом, подставляя (4.19-4.20) в (4.17), получаем
выражение для Ре(2)(Г) в случае оптимального сложения:
11
1
76 43
р 2 1
2
1 4 / 3 (Г 1)(Г 4/3) 8 2
при демодуляции с помощью дискриминатора;
(4.24)
1
1
2
2
1 2
при автокорреляционной демодуляции;
е2
1
1
1
2
1 2
при когерентной демодуляции.
р 2
(4.25)
3
3
1 16 2
(4.26)
На рис. 4.8 показаны зависимости, вычисленные с помощью выражений
(4.24) и (4.26). Из приведенных результатов следует, что в случае двукратного
комбинирования для уменьшения р в 10 раз необходимо увеличить C/N на 5 дБ,
при отсутствии разнесения – на 10 дБ.
1
53
Когерентная демодуляция
Автокорреляционная
демодуляция
Демодуляция с помощью
дискриминатора
10-1
Среднее значение р
10-2
10-3
С разнесением
10-4
Без разнесения
10-5
10-6
-10
0
10
20
30
40
50
60
70
Среднее значение отношения несущая /помеха , дБ
Рисунок 4.8 – Зависимость средней вероятности ошибки от среднего значения
отношения несущая /помеха при приеме MSK и QPSK сигналов и когерентном
приеме
в условиях воздействия квазистатических релеевских замираний.
Использовалось двукратное разнесение с оптимальным додетекторным сложением
54
5.ДИСКРЕТНЫЕСИГНАЛЫ ДЛЯ СИСТЕМ
БЕСПРОВОДНОГО ДОСТУПА
Исходя из рассмотренных в разделе 1.3 параметров широкополосных услуг в
сетях
следующего
поколения,
можно
сформулировать
требования
к
показателям эффективности систем беспроводного доступа, на которые следует
ориентироваться при выборе методов модуляции и помехоустойчивого
кодирования:
1.Высокая
удельная
скорость
передачи
информации,
реализуемая
применением многопозиционных сигналов плотнейшей упаковки[26].
2.Высокие
помехоустойчивость
и
энергетическая
эффективность.
Сверточное кодирование в сочетании с алгоритмом Витерби обеспечивает
возможность повышения этих показателей.
3.
Наилучшее
решение
задач
по
удовлетворению
этих
требований
обеспечивается применением сигнально-кодовых конструкций [26].
5.1. Ансамбли двумерных многопозиционных сигналов
В современных телекоммуникационных системах используются различные
ансамбли многопозиционныхсигналов.
Для описания ансамбля сигналов объема М
{S1(t), S2(t),…, SM(t)}
(5.1)
используют характеристики:
– Энергию сигнала Si(t), длительности T
T
Ei= Si2 ( t )dt,
0
– Взаимную энергию сигналов Si(t) и Sj(t)
(5.2)
55
T
Eij= Si ( t ) S j ( t )dt ,
(5.3)
0
– Энергию разности между сигналами Si(t) и Sj(t)
T
E i-j= [Si (t ) S j (t )]2 dt ,
(5.4)
0
– Коэффициент взаимной корреляции
ij
Eij
Ei E j
(5.5)
,
– Квадрат расстояния между сигналами
T
d
2
i j
2
E i j Si ( t ) S j ( t ) dt
(5.6)
0
Для сигналов с одинаковыми энергиями (Ei= Ej= Е) энергию разности сигналов
(5.4) можно представить так: Ei-j= 2 E (1 ij ) ).
Сигналы многопозиционных ансамблей можно получить путем изменения
(модуляции) какого-либо одного параметра переносчика, например, частоты
(многочастотные сигналы) и фазы (многофазные сигналы). Возможно
одновременное изменение нескольких параметров: амплитуды и фазы, частоты
и фазы и т. д. Составные сигналы формируются как комбинации исходных
элементарных сигналов. Элементарные сигналы не всегда являются простыми и
могут также иметь сложную форму. При всем многообразии ансамблей
сигналов изучение их свойств может быть выполнено методом, основанным на
представлении сигналов в системе базисных функций.
Предположим, что каждый сигнал из ансамбля (5.1) можно представить в
полной упорядоченной системе базисных функций в виде ряда
N
Si ( t ) s i ,k k ( t ).
k 1
Функции k ( t ) нормированы и удовлетворяют условию ортогональности:
T
( t ) ( t )dt 0 при k j
0
k
j
(5.7)
56
T
и 0 k ( t ) k ( t )dt 1
(5.8)
для всех к=(1...N). Здесь N–размерность используемого пространства сигналов.
На практике широко используют пространства размерности N=2, поскольку
формирование и обработка двумерных сигналов легко реализуются.
Коэффициенты разложения в (5.7) определяются выражением
T
s i ,k Si ( t ) k ( t ).
0
Набор коэффициентов s i ,k , характеризующих данный сигнал, определяет
вектор Si=(si,1,... si,N) в N-мерном пространстве сингалов.
Взаимная энергия сигналов (5.3) равна скалярному произведению векторов:
N
E ij (SiSj)= s i ,k s j,k .
(5.9)
k 1
При i=j из формулы (5.9) получаем выражение для энергии сигнала:
N
E i s 2 i ,k Si
2
,
(5.10)
k 1
которая равна квадрату нормы вектора Si .
Энергия разности сигналов (5.6) имеет вид
N
E i j (s i ,k s j,k ) 2 ,
k 1
и определяет квадрат расстояния между концами векторов Si и Sj
d ij2 Si S j
2
E i j .
Коэффициент взаимной корреляции вида (5.5)
N
s s
i , k j, k
ij k 1
EiE j
есть косинус угла ij между векторами Si и Si, т.е. ij cos ij .
Флуктуационную помеху ( t ) можно также представить в виде ряда:
N
( t ) k k ( t ).
k 1
(5.11)
57
При этом коэффициенты разложения k являются случайными величинами и
определяют случайный вектор помехи
(5.12)
(1 2 .... N ).
Определим
скалярное
произведение
вектора
суммы
сигнала
и
помехи X (Si ) и вектора сигнала S j
N
( XS j ) =Eij+ k s ik .
k 1
Скалярное произведение содержит регулярную составляющую Еij и
флуктуационную часть в виде ряда. Вычислим дисперсию флуктуации для
случая, когда сигнал и помеха действуют в полосе частот (0…F), причем
помеха – стационарный случайный процесс с равномерным односторонним
энергетическим спектром G(f ) и дисперсией D() N 0 F . Согласно теореме В. А.
Котельникова реализации сигнала и помехи могут быть представлены в
системе базисных нормированных функций: k (t ) 2F
sin 2F( t kt )
, k=(1..N).
2F( t kt )
При этом сигнал и помеху представляют в виде сумм (5.11) и (5.12), в которых
коэффициенты s i,k
и помехи, t
1
1
s i (kt ) и k
(kt ) – независимые отсчеты сигнала
2F
2F
1
– интервал дискретизации.
2F
N
Дисперсия флуктуаций D{ k si ,k }
k 1
N0
E i . Дисперсия проекции вектора помехи
2
на произвольный орт-вектор k с единичной энергией будет
D( k )
векторы
N0
,k=(1…N). Таким образом, проекции вектора помехи на базисные
2
k
одинаковыми
являются некоррелированными случайными величинами с
дисперсиями
N0
.
2
Согласно
теории
потенциальной
помехоустойчивости минимум вероятности ошибки воспроизведения сигнала
на
выходе
приемника
при
равновероятных
посылаемых
сигналах
обеспечивается оптимальным приемником, который работает по следующему
58
алгоритму. При различении двух сигналов Si(t) и Sj(t) на фоне помехи X(t)
решение принимается о посылке сигнала Si(t) по критерию минимума квадрата
расстояния
T
T
2
2
[ X ( t ) Si ( t )] dt [ X ( t ) S j ( t )] dt .
0
(5.13)
0
Для вычисления вероятности ошибки при передаче сигнала Si(t) необходимо
вычислить вероятности ошибочной регистрации на основе неравенства (5.13).
При большом числе сигналов ансамбля M и различных расстояниях между
парами различаемых сигналов вычисления вероятности ошибки этим методом
становятся громоздкими. Обычно в таких случаях используют аддитивную
верхнюю границу вероятности ошибки
P0
1 M M
2E
[1 (ij N б )] ,
2M i1 j1, ji
0
(5.14)
t2
2 x 2
e dt –табулированная функция Крампа,
2 0
где: ( x )
ij
d ij
2 Eб
–
нормированный
коэффициент
помехоустойчивости,
сопоставляющий расстояние между сигналами с типовым расстоянием 2 E б в
бинарной системе с противоположными сигналами.
Таким образом, в соответствии с формулой (5.14) помехоустойчивость
определяется набором взаимных расстояний между сигналами в ансамбле{dij}
и отношением q
Eб
энергии сигнала Eб, затрачиваемой на передачу бита
N0
информации к спектральной плотности мощности шума N0.
Вычисления по формуле (5.14) упощаются, если использовать наибольший
член суммы, соответствующий наименьшему расстоянию между сигналами в
ансамбле d мин min{d ij} , i=(1…N), j=(1…N), i j . При этом минимальный
59
нормированный коэффициент помехоустойчивости будет мин
d мин
. Отсюда
2 Eб
следует процедура оптимизации многопозиционных ансамблей сигналов:
1. При заданном объеме ансамбля дискретных сигналов М векторы сигналов
должны находиться в сигнальном пространстве на возможно большем
взаимном расстоянии.
2. Такие задачи оптимизации расположений (укладок, упаковок сфер
одинакового радиуса) решаются в многомерной геометрии на основе теории
пространственных точечных решеток. Элементарные сведения из этой теории
приведены в приложении А.4 монографии [26].
3. Если координаты векторов сигналов ансамбля совмещать с центрами
пространственной точечной решетки, то построение ансамбля на основе
фрагмента решетки, занимающего некоторый объем при плотнейшей упаковке,
обеспечит максимум числа сигнальных точек (числа сигналов в анамбле M) и
максимум удельной скорости
N
log M
.
N
(5.15)
На практике широко используют ансамбли поверхностно-сферической
укладки (ПСУ), в которых сигнальные точки расположены на одинаковых
расстояниях от начала координат (т. е. расположены на поверхности
многомерной сферы). Все сигналы таких ансамблей имеют одинаковые
энергии (например, сигналы угловых видов модуляции:ЧМ или ФМ).
Практическое применение таких ансамблей сигналов с равными энергиями
предпочтительно, поскольку алгоритм их оптимального приема не зависит от
уровня сигнала. Известны также ансамбли объемно-сферической укладки
(ОСУ), в которых сигнальные точки могут располагаться как на поверхности
сферы, так и внури нее (например, сигналы с амплитудной модуляцией).
Подробные сведения по выбору классов пространственных точечных решеток
60
для синтеза ансамблей многопозиционных двумерных сигналов приведены в
разделе 2.3 монографии[26].
На рис.5.1 представлены типичные конфигурации двумерных ансамблей ПСУ и
ОСУ с числом сигналов М=4….128.
Рисунок 5.1– Ансамбли двумерных сигналов
61
Eб
,
N0
необходимой для обеспечения вероятности ошибки Р0=10-5 при оптимальном
приеме сигналов многопозиционных ансамблей, представленных на рис.5.1.
В таблице 5.1 сведены результаты расчетов по формуле(5.14) величины q
Таблица 5.1
Характеристики ансамблей сигналов
Объем
Удельная
скорость
N
М
4
8
16
1,0
1,5
2,0
Ансамбль
log M
N
Eб/N0,
дБ
I- ФМ-4 (QPSK)
9.6
II- (1, 3)
11.5
IV- (1, 7)
11.7
VII- (Triang.)
11.8
VI- (4, 4)
12.0
VIII- (Square)
12.9
III- ФМ-8 (8PSK)
13.5
XIV- (Hex.)
13.7
XII- (1, 5, 11)
13.9
IX- ФМ-16
18.0
(16-PSK)
32
2,5
XVI- (Square)
XV- (4, 11, 17)
ФМ-32 (32-PSK)
64
3,0
16,1
16.1
23.0
XX- (Triang)
18.1
XIX- (Square)
18.5
ФМ-64(64-PSK)
28.2
62
Из представленных ансамблей наибольшего внимания заслуживают
сигналы многопозиционной фазовой модуляции ФМ-М, которые обеспечивают
минимальный пик-фактор и легко реализуются на практике. Повышение с
ростом числа позиций М требуемое отношение сигнал/ шум Eб/N0 легко
обеспечить применением корректирующего кодирования в структуре
сигнально-кодовых конструкций.
5.2.Широкополосные сигналы на базе ортогональных гармонических
переносчиков(OFDM)
В современных телекоммуникационных системах для передачи информации
по каналам с частотно-селективными замираниями широко используются
многочастотные сигналы ортогонального частотного мультиплексирования
OFDM(Orthogonal Frequency Digital Multiplex). Основным преимуществом
OFDM
технологии
является
её
высокая
частотная
эффективность.
Использование сигналов OFDM позволяет реализовать высокую скорость
передачи информации и создает предпосылки для эффективного подавления
многолучевой
интерференции
сигналов,
когда
на
вход
приемника
передаваемый сигнал поступает различными путями. Для минимизации
интерференции в технологии OFDM поток передаваемых данных разделяется
на множество частотных ортогональных подканалов (поднесущих).
В широко распространенном варианте реализации многочастотных сигналов
используют
ортогональные
гармонические
переносчики,
описываемые
тригонометрическими функциями
{cos l0t}, cos m0t} ,l,m=1,2,…,N, 0 2F0 , F0
1
, 0t T
T
(5.17)
ортогональными на интервале T:
T
cos l t cos m tdt 0, l m , l,m=1,2,…,N.
0
0
0
Проверка ортогональности дает:
(5.18)
63
T
I=
1
cos m0t cos l0tdt
T 0
T
=
1 T
1
1
cos(m l )0tdt
cos(m l )0tdt =( cos axdx sin ax ) =
2T 0
2T 0
a
=
1
1
sin( m l )0T +
sin( m l )0T .
2T (m l )0
2T (m l )0
При выполнении условия 0 2F0 , F0
(5.19)
1
вторые слагаемые в конце формулы
T
(5.19) равны нулю, что и обеспечивает ортогональность
Спектры сигналов (5.17) с точностью до постоянных множителей на
положительной полуоси частот описываются формулой:
T /2
S ( ) e
il0t it
e
dt
sin( l0 ) T
T / 2
Таким
образом,
( l0 )
когда
2 , .
спектры
(5.21)
соседних
поднесущих
частично
перекрываются, ортогональность сигналов поднесущих гарантирует частотную
независимость подканалов, что в итоге обеспечивает отсутствие межканальной
интерференции (рис.5.2).
Рисунок 5.2 – Модули спектров ортогональных поднесущих сигнала OFDM
64
Формирование сигнала OFDM в модуляторе передающего устройства
реализуется
путем
преобразования
выполнения
быстрого
обратного
дискретного
которое
переводит
сигнал,
предварительно
Фурье,
мультиплексированный на N каналов, из временного представления в
частотное,
а
в
демодуляция
выполняется
путем
прямого
быстрого
преобразования Фурье.
5.3.Сигнально-кодовые конструкции
Как отмечено выше, переход к многопозиционным сигналам позволяет
повысить удельную скорость передачи информации. Однако, при этом
снижается помехоустойчивость, поскольку с ростом числа позиций расстояния
между
сигналами
уменьшаются.
Для
компенсации
ухудшения
помехоустойчивости целесообразно использовать корректирующие коды.
Структуры,
сочетающие
свойства
многопозиционных
сигналов
и
помехоустойчивые свойства корректирующих кодов в литературе принято
называть
сигнально-кодовыми
(СКК)
конструкциями
[26].
Термин
сигнально-кодовая конструкция в теорию был введен автором пособия.
Обобщенная структура кодера-модулятора СКК представлена на рис.5.3.
v1
vj
uj
Кодер j
u
Кодер μ
v
Модулятор
Кодер 1
Формирователь
блока
u1
S
Рис. 5.3 – Структура кодера-модулятора СКК
Она содержит набор кодеров кодов (1...j..), которые можно трактовать как
внешние
коды
по
отношению
к
ансамблю
сигналов,
формируемых
65
модулятором. Зачастую эти сигналы называют внутренним кодом. В этом
случае используют определение такой СКК, как обобщенный каскадный код
(ОКК). В таких структурах важную роль играет метод согласования выходов
кодеров с входом модулятора, которое осуществляется формирователем блока
кодовых символов. Одним из возможных способов согласования является
применение модуляционного кода Грея. В этом случае тип сигнально-кодовой
конструкции обозначают как СКК-Г. Наряду с кодом Грея возможно
использование
другого
модуляционного
кода.
Вовсе
не
обязательно
использовать в структуре СКК двоичные коды. В этом случае внешним кодом
может быть один недвоичный код (μ=1) с основанием алфавита q, равным
объему алфавита многопозиционного ансамбля M, а формирователь блока
вырождается, поскольку длина блока сокращается до величины μ=1. Типичным
является применение M-ичного кода над кольцом классов вычетов целых чисел
R(M), символами которого являются элементы ансамбля сигналов ФМ-М. Такие
конструкции обычно обозначают как СКК-М. Для синтеза СКК-Г используют
декомпозицию ансамбля неэквидистантных сигналов, состоящую в том, что
исходный
ансамбль
раскладывается
на
набор
вложенных
ансамблей
(подансамблей, каждые точки которых принадлежат исходному ансамблю),
причем, расстояния между сигнальными точками в подансамблях di должны
подчиняться
неравенству:dmindidmax,
где
dmax,
dmin –
максимальное
и
минимальное расстояния ансамбля. При построении СКК принадлежность к
подансамблям кодируется набором внешних кодов с возрастающими кодовыми
расстояниями, которые выбираются таким образом, чтобы выровнять все
результирующие
расстояния.
Для
оценки
эффективности
используют
следующие показатели[26]:
Информационная
эффективность
(коэффициент
использования
пропускной способности канала С)
R/C ,
(5.23)
где R –скорость передачи информации по каналу;
Энергетическая эффективность (коэффициент использования мощности
66
сигнала)
(5.25)
R / 0
где ρ0–отношение сигнал/шум в канале;
Частотная эффективность (коэффициент использования полосы частот F)
R/ F .
(5.26)
Анализ эффективности различных вариантов СКК выполнен в монографии[26].
В таблице 5.2 даны результаты этих исследований для сигналов ФМ-8 и
ФМ-16.
Таблица 5.2
Характеристики СКК
Метод Многочлены
модул.
кода
ФМ-8
711,342
ФМ-8
22,11,04
ФМ-16 400,200,010,12
R
dfe
Вид СКК
АЭВК, дБ
1/2
2/3
3/4
2
3
3
2,022 СКК-М
2,141 СКК-Г
1,149 СКК-Г
0,75
1,0
1,5
6,22
3,6
–1,8
Порождающие многочлены внешних кодов приведены в восьмеричной
форме записи. R–скорость СК, d fe –свободное расстояние СКК, которое
определяет асимптотический энергетический выигрыш СКК по отношению к
некодированной ФМ-2:
d 2fe
АЭВК=10 lg 2 (дБ).
d0
Данные
табл.5.2
потверждают
цересообразность
(5.27)
применения
СКК
в
телекоммуникационных системах. При соответствующем выборе внутренних
многопозиционных сигналов и внешнего корректирующего кода удается
обеспечить достаточно высокую удельную скорость при сохранении высокой
помехоустойчивости. При этом более эффективными оказываются СКК с
внешними недвоичными сверточными кодами СКК-М, что можно объяснить
лучшим согласованием характеристик внешнего СК и внутреннего ансамбля
67
ФМ-М сигналов. В первые годы исследований СКК в них применялись в
качестве внешних только блоковые коды. Последующие исследования
подтвердили
целесообразность
использования
для
этой
цели
более
эффективных сверточных кодов и алгоритма А. Витерби для декодирования
всей СКК. По существу, такие СКК перешли в разряд решетчатых сигнальнокодовых конструкций (РСКК). Как показано в монографии [26] решетчатое
представление СК и СКК облегчает как теортический анализ их свойств, так
экспериментальное исследование.
Рассмотрим алгебраическое описание СКК-М. Далее использованы
следующие обозначения: q–основание q-ичного внешнего линейного кода,
R=k/n–скорость кода, k–количество информационных символов в кодовом
блоке длиной n, M– объем алфавита M-позиционного анмсамбля, DE –
расстояние в метрике Евклида. На рис.5.2 показана структура СКК. Правило
отображения кодовых символов vi на сигналы ансамбля Si определяется
модуляционным кодом.
Для анализа свойств рассматриваемой СКК используем алгебраическое
описание входящих в конструкцию сигналов и кодов.
DE i
1
б)
v1
u1
4
6
D
5
3
7
0 1
v2
2
Ui
3
Кодер
в)
Рис. 5.2 – Структура СКК:
а)внешний недвоичный кодер (1,3),
б)ансамбль сигналов ФМ-8,
в)согласование кодера и модулятора
Vi
Модулятор ФМ-М
а)
Si
68
Рассмотрим
мультипликативную
циклическую
группу
с
образующим
элементом в виде унитарной матрицы [26]
Cos (2 / M ) Sin( 2 / M )
,
Sin (2 / M ) Cos (2 / M )
(5.28)
Θ=
где M– целое.
Мультипликативная Абелева циклическая группа порядка M содержит
элементы в виде целых степеней матрицы (5.28)
GS(M)={Θ0,Θ1,Θ2,..,ΘM-1}
(5.29)
с операцией умножения матриц, где результат возведения матрицы (5.28) в
целую степень k будет
Cos (2k / M ) Sin(2k / M )
.
Sin (2k / M ) Cos ( 2k / M )
Θk=
(5.30)
Если So=(S0,0) – вектор сигнала в двумерном пространстве, то умножение
этого вектора на унитарную матрицу (5.22) дает результат SoΘ=(S0Cos(2π/M),0),
т.е. модуль вектора S0 остается неизменным, а угол по отношению к
горизонтальной оси изменяется на величину (2π/M). Можно сказать, что
умножение исходного вектора на унитарную матрицу Θ приводит к
пространственному повороту против часовой стрелки на угол 2π/M, как
показано на рис.5.3а. Циклическую группу матриц поворота (5.21) в теории
связи часто используют для описания набора сигналов фазовой модуляции ФММ, отличающихся различными пространственными углами, кратными величине
(2π/M), где M– число позиций фаз сигналов.
DE(Si , Sj)
S0Θ
Si
2π/M
б)
S0
а)
Sj
Δφ=(vi-vj)π/M
Рис. 5.3–Векторное представление сигналов ФМ-М:
а) действие матрицы поворота,
б) вычисление расстояния
69
По соображениям наглядности и удобства сигналы (сигнальные точки)
ансамбля ФМ-М обычно обозначают целыми числами – элементами кольца
целых чисел по модулю М с алфавитом {0,1,2,....(М–1)}, как показано на
примере для ФМ-8 (рис.5.2б). Для построения СКК используют в качестве
внешних
кодов
линейные
корректирующие
коды
(блоковые
либо
сверточные) над кольцом целых чисел по модулю q=М. В этом случае
множество символов внешнего кода V={vo, v1,… vk… vM-1} образует аддитивную
циклическую группу GV с операцией сложения по модулю М. В целом такая
СКК (рис.5.2в) представляет собою единое целое и удобна для анализа
благодаря тому, что сигналы и код описываются единым математическим
языком. Модуляционный код такой СКК-М простой и состоит в точном
соответствии
индексов
кодовых
символов
и
индексов
сигналов:
(vi→ Si ).
Пусть заданы символы на выходе кодера vi и vj и соответствующие им сигналы
Si(t)=S0cos(ω0t+vi2π/M), Sj(t)=S0cos(ω0t+vj2π/M), а также соответствующие им
векторы сигналов Si, Sj. В этом случае расстояние по Евклиду между векторами
сигналов определяется выражением (см.рис.5.2б):
DE(Si,Sj)=2S0sin[(vi– vj)π/M].
(5.31)
Как видим, расстояние определяется разностью кодовых символов. Это
определяет свойство инвариантности модуляционного кода, которое
рассмотрено
ниже.
Пусть
последовательность
символов
Vi
(рис.5.2в),
поступающих на вход модулятора отображается по правилу модуляционного
кода в последовательность сигналов Si(t) следующим образом:
Vi→Si(t).
Аналогично, рассмотрим другую цепочку отображений:
Vj→Sj(t).
(5.32)
70
Оценим расстояние (в метрике Евклида) между последовательностями
сигналов:
{Vi→Si(t);Vj→Sj(t)}→DЕ(Si, Sj).
(5.33)
Вновь определим цепочку отображений V*→S*(t), где V*– произвольная
последовательность внешнего кода, а также определим отображения
{(Vi V*)→Si*(t); (Vj V*)→Sj*(t)} → DЕ(Si*, Sj*),
(5.34)
где знак означает сложение в алгебре символов алфавита внешнего кода.
Отображение V→S(t) и соответствующий ему модуляционный код будут
инвариантными, если для любых i j и произвольной последовательности
символов V* в наборах отображений (5.33) и (5.34) выполняется равенство
расстояний DE(Si, Sj)=DE(Si*, Sj*). Свойство инвариантности существенно
облегчает
теоретический
дистанционных
свойств
анализ
СКК.
и
экспериментальное
Выберем
в
паре
исследование
отображений
(5.34)
вспомогательную последовательность V*=Vj.
Тогда подстановка этого равенства в отображении (5.26) дает
{(Vi Vj)→ Sij(t); (Vj Vj=0)→ S0(t)} → DЕ(Sij, S0)=WЕ(Sij).
(5.35)
Иными словами, расстояние между последовательностями сигналов
DЕ(Si, Sj)=DЕ(Si*, Sj*) в (5.35) оказывается равным «весу Евклида» WЕ(Sij),
«смещенного» сигнала Sij, т.е. равным расстоянию Евклида этого сигнала от
полностью нулевого сигнала S0. Свойство инвариантности известно из теории
линейных кодов, в которой вместо изучения структуры взаимных расстояний
кодовых комбинаций (последовательностей) считается достаточным изучение
«весовой» структуры этих комбинаций, причем, способ оценки расстояний
(«веса») может быть различным (по Хэммингу, по Евклиду и т.п.). Следует
отметить, что по аналогии с линейными кодами инвариантные в определенном
выше смысле СКК в западной литературе называют «суперлинейными». В
рассматриваемых конструкциях с внешними q-ичными кодами над кольцом и
внутренними
М-позиционными
сигналами
свойство
инвариантности
обусловлено единой алгебраической структурой алфавитов сигнала и кода
(Кольцо классов вычетов целых чисел по модулю q=М). Причем, если свойства
71
инвариантности справедливы для элементов алфавита, то они, естественно,
будут выполняться и для любых кодовых комбинаций (последовательностей),
составленных из этих элементов.
6.ДИФФЕРЕНЦИАЛЬНЫЕ МЕТОДЫ ПЕРЕДАЧИ ИНФОРМАЦИИ
В СИСТЕМАХ БЕСПРОВОДНОЙ РАДИОСВЯЗИ
6.1.Введение
Современный
характеризуется
этап
широким
развития
телекоммуникационных
использованием
технологий
систем
широкополосной
беспроводной радиосвязи. Особенностью каналов таких систем является
наличие
замираний,
обусловленных
многопутевым
распространением
радиосигнала. Развитие методов передачи информации по каналам с
замираниями прошло ряд этапов [26]. Очевидным и, казалось бы, простым
методом передачи информации по каналам с замираниями сигналов может
служить
метод
разнесения.
При
разнесении
организуются
несколько
независимых путей распространения сигналов, по которым передается одна и
та же информация. При таком подходе прием разнесенных сигналов
ориентирован
на
эффективное
поступивших
различными
выделение
путями.
Первым
информации
из
сигналов,
апробированным
способом
разнесения было пространственное разнесение, при котором сигнал,
излучаемый одной передающей антенной, принимался на две разнесенные в
пространстве
приемные
антенны.
Дальнейшее
развитие
методов
пространственного разнесения наступило с появлением статьи G. Foschini [28],
в которой предлагалось окружить среду многопутевого распространения
радиосигналов
множеством
передающих
и
приемных
антенн
и
соответствующим образом организовать передачу и обработку сигналов на
приеме. Эта идея была быстро воспринята, многим исследователям пришлось
отказаться от старых консервативных взглядов на математическую модель
канала радиосвязи. Появился новый термин MIMO (Multiple Input, Multiple
Output–множественный вход, множественный выход). Подробные обзоры
72
методов передачи информации по MIMO каналам опубликованы в статьях
[15,16]. Появление идей технологии MIMO и наличие к тому времени успехов
теории
и
техники
сверточного
кодирования
разработку
идей
исследователей
на
кодирования
(ПВК)[16].
пространственное
В
разнесение
неизбежно
выводило
пространственно-временного
системах
ПВК
эффективно
сочеталось
(за
пространственного
разнесения
счет
передающих и приемных антенн) и временное разнесение за счет
рационального построения временных последовательностей корректирующих
кодов. Отличительной особенностью всех работ по MIMO технологиям
является предположение о «квазистационарности» радиоканала. Используемая
модель радиоканала базировалась на предположении о том, что в канале имеют
место неселективные (плоские) замирания, параметры которых изменяются во
времени медленно (т. н. «медленные плоские» замирания). Такая модель
оказывалась адэкватной ситуациям замираний в каналах фиксированной
радиосвязи с многолучевым распространением радиоволн, когда передатчики и
приемники неподвижны, но для мобильной связи с подвижными абонентами
модель была не пригодна. В рамках квазистационарной модели появились
термины: «интервал когерентности замираний» (fading сoherence time) и
«канал с кусочно-постоянным федингом» (piecewise-constant fading channel),
характеризующие каналы с переменными параметрами, свойства которых
остаются неизменными во времени на некотором, достаточно протяженном
интервале. Такой подход породил «базовый» формат передачи информации во
всех вариантах MIMO технологий, подробно описанный в работе [14]:
пакетный способ передачи информации с тестовым «обучающим» (training)
синхрословом в начале пакета, функции которого сводились к обеспечению на
приеме оценки параметров канала на протяжении интервала когерентности для
последующей обработки принятого сигнала. Недостатки этого варианта
(сложность реализации, затраты пропускной способности на передачу
синхрослов, срыв связи при утрате синхросингнала) вызвали к жизни идеи
отказа
от
применения
обучающих
сигналов
и
переходе
к
т.н.
73
дифференциальным методам передачи. В русскоязычной литературе об этом
было заявлено в статье [14]. Отмечалось, что при дифференциальной передаче
по каналу с медленными замираниями каждый символ, предшествующий
данному символу, может служить этому символу в качестве обучающего
(опорного) символа. Такая коструктивная идея впервые была высказана
Н.Т.Петровичем в статье [37] и реализована в авторском свидетельстве в виде
относительной фазовой модуляции (ОФМ) [38]. Метод ОФМ занял достойное
место
в
радиотехнике
и
в
западной
литературе
именуется
как
дифференциальная фазовая модуляция (differential phase modulation).
Ю.Б.Окунев развил идею Н.Т. Петровича в монографии [39], ссылки на
которую можно найти в западных публикациях по дифферециальным методам
для MIMO технологий [41,42]. Разработка идей дифференциальной модуляции
в зарубежной литературе происходило по двум направлениям:
1.Дифференциальное
кодирование
канала
с
внутренними
«суперортогональными» блочными кодами[41];
2.Дифференциальное кодирование канала с внутренними «унитарными»
сигналами [42]. Характерно, что в этих статьях разработка дифференциальных
методов передачи для квазистационарных MIMO каналов ведется эвристически,
«по аналогии» с дифференциальной фазовой модуляцией. Здесь уместно
отметить, что в докладе на научной конференции Н. Петрович сообщал, что к
идее ОФМ он пришел интуитивно. Это побудило автора пособия разработать и
опубликовать
строгое
математическое
обоснование
(синтез)
метода
относительного кодирования (см. [40, разд. П.6.2]). Не отрицая важность роли
интуиции, аналогий и эвристических методов в успехах научных исследований,
автором пособия было выполнено строгое математическое обоснование
дифференциальных методов модуляции для современных систем с MIMO
каналами, тем более что предварительный анализ показал, что такой подход к
этой
проблеме
позволяет
вскрыть
дополнтельные
возможности
дифференциальных методов, о которых ничего не говорится в упомянутых
выше зарубежных статьях [41,42]. Анализ этих работ показал, что структура
74
«унитарных» сигналов из работы [42] наиболее подходит для формирования
стройной теории дифференциальной модуляции. По этой причине в данном
разделе внимание уделено именно такому направлению разработки теории
дифференциальной модуляции. Изложение ведется на основе адэкватного
данной задаче математического аппарата исчисления конечных разностей
[43], основные определения и свойства которого даны ниже в разд.6.2.
6.2.Исчисление конечных разностей. Определения и свойства
Исчисление конечных разностей и теория разностных уравнений составляют
важные разделы современной математики [43]. Рассмотрим последовательность
отсчетов непрерывной функции времени s(t):
…. s(t1), s(t2),…, s(tn-1), s(tn)......
(6.1)
Конечная разность первого порядка определяется соотношением
Δ1n s= s(tn)– s(tn-1).
(6.2)
Здесь верхний индекс знака разности Δ указывает номер порядка конечной
разности, нижний индекс – номер разности, соответствущий ее положению во
времени. Между основными положениями дифференциального исчисления и
базовыми положениями теории конечных разностей существует много прямых
аналогий. В частности, по аналогии с существованием производных высоких
порядков можно определять конечные разности порядка К на основе
рекуррентного соотношения
ΔКn s= ΔК–1n s – ΔК–1n-1 s.
(6.3)
Разности более высоких порядков могут быть выражены через отсчеты
сигнала (6.1):
Δ2n s= s(tn)–2s(tn-1)+ s(tn-2),
Δ3n s= s(tn) –3s(tn-1)+3 s(tn-2) и т.д.
(6.4)
Дискретно-разностным преобразованием (ДРП) сигнала s(t) называют
такую операцию, при которой последовательности отсчетов сигнала (6.1)
ставится в однозначное соответствие последовательность конечных разностей
высокого порядка ΔКns, вычисленных по правилу (6.3). Отметим два
фундаментальных свойства дискретно-разностных преобразований:
75
1.Свойство линейности ДРП
ΔК(s1+s2)= ΔК (s1) + ΔК(s2);
(6.5)
2.Свойство инвариантности ДРП
Разность ΔК(ζ)=0, если равна нулю производная сигнала К-го порядка
dKζ(t)/dtK=0.
(6.6)
Это свойство позволяет сформулировать условие инвариантности ДРП к
некоторым мешающим воздействиям. Пусть имеется аддитивная смесь
полезного сигнала s(t) и мешающего воздействия ζ(t), когда x(t)= s(t)+ ζ(t). Если
это воздействие таково, что выполняется условие dKζ(t)/dtK=0, то, согласно
свойствам 1 и 2, получаем
ΔК(x)= ΔК (s+ ζ) + ΔК(s)+ ΔК(ζ)= ΔК(s)=invar ζ.
(6.7)
Эта запись означает, что разность К-го порядка сигнала s является
инвариантом преобразования, состоящего в добавлении к этому сигналу
мешающего воздействия ζ, удовлетворяющего условию (6.6).
Таким образом, можно сформулировать основную идею, лежащую в основе
всех дифференциальных методов модуляции:
С помощью дискретно-разностного преобразования смеси сигнала и помехи
можно освободиться от влияния определенных мешающих воздействий
или, по крайней мере, ослабить их влияние. При этом, дискретно-разностному
преобразованию подвергается как сигнал, так и помеха. Информационно
содержательными являются конечные разности сигнала.
6.3.Дифференциальная передача данных по каналу с неоднозначностью
Применим свойство инвариантности ДРП к решению простейшей задачи
передачи данных по дискретному каналу с помехой в виде неоднозначности
символов. Модель такого канала показана на рис.6.1.
f(D)
u(D)
v(D)
Рисунок 6.1 – Модель канала с помехой неоднозначности
76
Все последовательности сигналов в этой схеме представлены в виде рядов по
степеням оператора задержки D (символы-коэффициенты рядов выбираются из
кольца классов вычетов целых чисел по модулю М0 ):
u(D)=u0D0+u1D+u2D2+...+uiDi+….= u k D k ....–последовательность передаваемых
k 0
символов; v(D) –последовательность принятых символов;
f(D) –последовательность символов неоднозначности; – сумматор по модулю
М0.
Помеха
неоднозначности–некоторая
числовая
последовательность,
которая добавляется к передаваемой последовательности символов (рис.6.1)
f(D)=f0D0+f1D+f2D2+...+fiDi= f k D k .
k 0
Положим, что f(D) есть последовательность постоянных чисел f:
f(D)=fD0+fD+fD2+...+fDi= f D k .
(6.8)
k 0
Можно показать, что ряд (6.8) можно представить компактно так f(D)=
f
.
1 D
Тогда результат действия такой помехи неоднозначности будет
(6.9)
v(D)=u(D)+f(D).
Используем отмеченное выше (см.(6.6), (6.7)) свойство инвариантности
ДРП к мешающему воздействию. В данном случае –это неизменная на всем
интервале рассмотрения аддитивная помеха неоднозначности f(D). Для
вычисления
использовать
конечных
разностей
запаздывающую
последовательности
последовательность
v(D)
необходимо
Dv(D).
Тогда,
в
соответствии с определением конечной разности первого порядка (6.2) для
любой последовательности v(D) справедливо равенство
Δ1v(D)=v(D)– Dv(D)=v(D)(1–D).
(6.10)
Иными словами, в этом примере умножение на
KДД=(1–D)
(6.11)
77
есть оператор дифференциального декодера (ДД) вычисления первой
разности последовательности v(D). Применяя это правило к (6.9) и используя
свойство линейности ДРП получаем
Δ1v(D)=Δ1u(D)+Δ1f(D)=Δ1u(D).
Как
и
следовало
ожидать,
в
(6.12)
результате
вычисления
ДРП
помеха
неоднозначности отсутствует (разность Δ1f(D)=0). Однако, передаваемая
последовательность u(D) представлена разностью первого порядка Δ1u(D),
которая, по аналогии с равенством (6.10), равна Δ1u(D)=u(D)(1–D). Для
извлечения передаваемой последовательности из первой разности необходимо
воспользоваться равенством
u ( D)
1u (D)
1 D
.
(6.13)
Видно, что для восстановления передаваемой информации необходимо на
передающей стороне передаваемую проследовательность предварительно
обработать оператором КДК, который удовлетворяет условию КДКKДД=1.
Отсюда получаем оператор и соответствующую ему структуру преобразования
передаваемой последовательности
KДК =
1
.
1 D
(6.14)
Структура преобразования на передаче (дифференциального кодирования (ДК))
следует из очевидных равенств: v(D)=u(D)KДК(D)= u(D)
1
1
, v(D)= u(D)
,
1 D
1 D
v(D)= u(D)+D v(D).
f(D)
u(D)
ДК
ДД
D
D
v(D)
Рисунок 6.2 – Дифференциальное кодирование и декодирование в
канале с помехой неоднозначности
78
Структуры дифференциального кодера (ДК) и дифференциального декодера
(ДД), соответствующие формулам (6.14) и (6.11), соответственно, показаны на
рис.6.2. Следует отметить особенность прохождения помехи неоднозначности
через
дифференциальный
декодер:
первый
пакета
символ
помехи
неоднозначности не подавляется. Это следует из простой записи
f(D)КДД(D)=f(D)(1–D)=fD0.
Отмеченное
свойство
является
общим
для
всех
вариантов
дифференциальных методов.
Представленная в этом разделе модель при М0=2 полностью соответствует
идеологии двоичного относительного
кодирования, предложенной Н.Т.
Петровичем[38,39].
6.4.Модель системы передачи информации по технологии MIMO
Основная идея технологии MIMO иллюстрируется на рис.6.3. Передающая
часть сиcтемы содержит M передатчиков (T1..TM) с передающими антеннами,
тогда как приемная часть содержит N приемников и приемных антенн (R1..RN).
Считается, что замирания порождаются рассеивающей средой распространения
радиосигнала H.
H
S
Мультиплексор
s1
T1
R1
x1
T2
R2
x2
RJ
Приемник
МП
s2
Ti
hij
si
TM-1
RN-1
TM
RN
SM
Рисунок 6.3– Обшая структура системы MIMO
xN
79
На рисунке стрелками показано, что сигнал любого из передатчиков Ti
может достигать входа любого из приемников (R1..RN), претерпевая замирания.
Работа
системы
обеспечивается
мультиплексором
на
передаче,
демультиплексором на приеме и приемником максимального правдоподобия на
приемной
стороне.
Таким
образом,
вводится
пространственная
избыточность, благодаря которой удается «пронизать» турбулентную среду
распространения
радиосигнала
и
избежать
влияния
замираний
при
соответствующей обработке принятой совокупности сигналов. Говорят, что
такая структура обеспечивает передачу «от объема к объему» (from volume to
volume). Это определение, действительно, подчеркивает принципиальное
отличие такой объемно-многомерной пространственной модели канала от
привычной одномерной модели, вытянутой в одну линию между передатчиком
и приемником. На передающей стороне мультиплексор организует передачу
сигналов таким образом, чтобы через каждую из М антенн передавались блоки,
содержащие Т передаваемых последовательно во времени сигналов. Для
компактной записи всех процессов удобно сигналы-функции времени вида
S(t)=S0cos(ω0t+φ) представлять комплексным числом s(t)= S0ejφ. Используем
следующее обозначение сигналов si(t), где: t– номер момента времени (указан в
скобках, 0<t<T. Параметр T– длина блоков сигналов, передаваемых через
каждую из М антенн); i– номер антенны на передающей стороне(1<i<M).
Сформулированное
выше
условие
последовательной
передачи
можно
выполнить при такой разбивке потока передаваемых сигналов:
s=[s1(1), s2(1), s3(1),…, si(t),…, sM(1)] [s1(2), s2(2), s3(2),…, si(t),…, sM(2)] …→
→...[s1(3), s2(3), s3(3),…, si(t),…, sM(3)] …→... s1(T), s2(T), s3(T),…, si(T),…,
sM(T)].
Тогда сигналы, передаваемые по MIMO каналу можно представить в виде
матрицы размера (TxM) (Символы матриц отмечены жирным прописным
шрифтом)
80
S(ТxM)=
s1 (1)
s 2 (1) ... s i (1)
...
s M (1)
s1 (2)
...
s 2 (2) ... s i (2)
...
... ...
...
...
s M (2)
...
s1 (t)
s 2 (t)
...
s M (t)
...
si (t)
.
(6.15)
...
...
... ...
...
...
s1 (T) s 2 (T) ... s i (T) .... s M (T)
Матрицу-строку передаваемых сигналов можно представить как
S(1xM)= s1 , s 2 ,.., si ,..s M .
(6.16)
Видно, что вследствие работы мультиплексора через каждую из М антенн
следуют блоки сигналов длиной Т символов. Компактное описание процессов в
системах MIMO(MxN) удобно производить, используя матричную запись
матрицы коэффициентов передачи канала
H(MxN)=
h1,1
h1, 2
...
h1, N
h 2,1
...
...
h M 1,1..
h 2,2
...
h M 1, N 1 h M 1, N
h M ,1
h M,2
h M , N 1
,
(6.17)
h M,N
Представим матрицу-строку шума на входах приемных антенн в виде вектора
W (1xN) = w1 , w 2 ,.., w j ,..w N
и матрицу-строку принятого сигнала X(1xN) = x1 , x 2 ,.., x j ,..x N .
Тогда основное матричное уравнение для системы MIMO, изображенной на
рис. 6.3 можно представить так
X =HS+W.
(6.18)
Такие структуры обычно обозначают как MIMO(MxN) (M– количество
передающих антенн, N – количество приемных антенн). Здесь возможно
большое разнообразие вариантов систем. В монографии [26] рассмотрены
следующие частные варианты структуры MIMO(2x2):
1.Структура MIMO(1x2),именуемая как SIMO (Single Input- Multiple Output–
один вход-много выходов). Это традиционная система радиосвязи с одним
81
передатчиком
и
двумя
разнесенными
в
пространстве
антеннами
и
приемниками.
2.Структура SISO(1x1), именуемая как SISO (Single Input-Single Output
–один вход, один выход). Этот вариант пространственного разнесения не
предусматривает.
Матрица коэффициентов передачи канала (6.17) является основной
характеристикой канала MIMO. Анализ систем ПВК в литературе [15] основан
на априорном предположении, что такой канал квазистационарен. Анализу
статистических
характеристик
многолучевых
каналов мобильной
связи
посвящен специальный раздел монографии [13, разд.15.2,рис.15.1], где
утверждается, что снижение отношения сигнал/шум в службах сотовой и
персональной связи в диапазоне (1-2) ГГц, обусловленное замираниями,
описывается моделью Релея. Длительное время динамические свойства
(«быстрая»
нестационарность)
замираний
для
мобильных
абонентов
«гипнотизировали» исследователей систем ПВК. Достаточно скоро пришло
осознание того, что имеются все основания для фиксированых служб канал
типа MIMO считать квазистационарным, в котором передающая и приемная
стороны неподвижны и условия распространения радиоволн с течением
времени остаются прибизительно постоянными или не меняются вообще. При
скорости мобильного абонента 60 миль/час и связи на частоте 1,9 ГГц
интервал
когерентности
канала
составляет
3мсек.
В
большинстве
публикаций в зарубежной печати по вопросам MIMO, упоминаемых в обзоре
[35] предполагается, что в системах фиксированной связи коэффициенты
передачи hij, входящие в состав матрицы канала(6.16) неизменны на
протяжении, про крайней мере, нескольких интервалов длительности сигналов.
В то же время, эти коэффициенты изменяются случайным образом при
изменении фиксированных диспозиций передающих и приемных антенн.
Предполагается также, что статистика этих изменений подчиняется релевскому
либо обобщеному релевскому распределениям. В подавляющем большинстве
82
работ по методам ПВК в каналах MIMO непременным условием теоретического
анализа является квазистационарность канала в следующей форме:
–Передачу информации в структуре MIMO можно организовать кадрами
(frame), которые периодически передаются и имеют специальную структуру;
–Коэффициенты передачи в матрице(6.16) изменяются при изменении
местоположения передающих и приемных антенн;
–Коэффициенты
передачи
в
матрице(6.16)
остаются
неизменными
на
интервалах нескольких (обычно двух) рядом расположенных символов. При
этом рекомендуемая структура кадра имеет вид, показанный на рис.6.4. Такая
структура подобна широко используемой форме кадра в стандарте США
системы сотовой связи IS-136. Кадр состоит из начальной обучающей (traning)
последовательности ОП и периодически повторяющихся блоков передаваемых
данных, разделенных пакетами пилот-сигналов ПС. Структура обучающей
последовательности содержит информацию о номере передающей антенны (i) и
допускает определение на приеме в антенне с номером(j) коэффициентов
передачи hij, которые входят в состав матрицы (6.16).
ОП
ОП
Данные
Данные
ПС
ПС
Данные
Данные
ПС
ПС
Данные
Данные
ПС
ПС
Данные
Данные
Рисунок 6.4–Структура кадра системы ПВК
Структура ОП также обеспечивает синхронизацию по кадрам. Включение
пилот-сигналов ПС перед данными обусловлено необходимостью организации
в демодуляторе когерентного приема. Таким образом, все пространство между
рядами передающих и приемных антенн охвачено системой временного
мультиплексирования, техника которого давно хорошо освоена в системах
сотовой мобильной связи с временным делением каналов TDMA. Этим, видимо,
и объясняется то обстоятельство, что любая теоретическая работа из
упомянутого выше обширного списка публикаций [35] по тематике MIMO,
начинается с предположения о квазистационарности такого канала.
6.5.Информационная теория метода ПВК в каналах MIMO
Удалено: ¶
83
С первых шагов разработки теории ПВК-MIMO специалисты обратились к
фундаментальным положениям теории информации о пропускной способности
канала. Как известно, теория информации на основе подсчета пропускной
способности канала позволяет определить предельные значения скорости
передачи, хотя и не указывает на конкретный метод, реализующий эту
скорость. Для канала без памяти с постоянными параметрами величина
нормализованной пропускной способности имеет вид
2
С log 2 (1 q h ) bit/s/Hz,
(6.19)
где h–нормализованный коэффициент передачи канала и q –отношение сигнал
/шум
в
канале.
Рассматривая
в
составе
структуры
рис.6.3
канал
SIMO(1xM)(один вход и M выходов) пропускную способность можно
представить так
M
2
С SIMO log 2 1 q h j bit/s/Hz,
j1
(6.20)
где h j –коэффициент передачи канала в направлении к j-й антенне, который в
этой модели считается известным на приемной стороне. Отметим важную
особенность выражения (6.20): с увеличением числа приемных антенн M
пропускная способность растет по логарифмическому закону. В общем случае
информация о состоянии канала не может быть известна на передающей
стороне. Поэтому при подсчете пропускной способности полагают мощности
всех передатчиков одинаковыми. В этом случае для канала MIMO(Nx1)
(N входов – один выход) пропускная способность будет
2
q N
С MISO log 2 1 h i bit/s/Hz,
N i1
(6.21)
где нормализация по N учитывает равное распределение средней мощности
передаваемого сигнала по каналам передачи. Здесь также имеет место
логарифмическая зависимость. В целом, используя разнесение как передающих
84
так и приемных антенн,объединяя формулы (6.20) и (6.21) можно получить
результирующее выражение для нормализованной пропускной способности
канала MIMO(NM) [35]:
q
С MIMO log 2 det I M HH T bit/s/Hz .
M
(6.22)
Здесь в круглых скобках указана сумма матриц: IM –единичная матрица
размераM, HHT–произведение матрицы канала H на транспонированную
матрицу HT, а det есть детерминант матрицы-суммы , имеющей размеры (NM).
Важное отличие выражения (6.22) от формул (620) и (6.21) состоит в том, что
пропускная
CMIMO
способность
m=min(MN),тогда
как
в
растет
упомянутых
линейно
формулах
с
ростом
такая
величины
зависимость
логарифмическая. Это дает основание в последующем условно именовать
величину m=min(MN) как «объем разнесения», т.е. при сравнении и выборе
методов отдавать предпочтение методам с наибольшим значением объема m.
6.6.Дифференциальная передача по каналу SISO
Перед рассмотрением дифференциальных методов передачи в канале MIMO
полезно выполнить анализ для одного из подканалов на рис. 6.3 (например,
канал (Ti→ Rj), содержащий одну передающую и одну приемную антенны). Для
передачи дискретной информации здесь и далее будем использовать
многопозиционную фазовую модуляцию ФМ-L, которая обеспечивает высокую
удельную скорость передачи информации (L–число сигналов в ансамбле). В
соответствии с определением статьи [43] сигналы многопозиционной ФМ
относятся
к
категории
унитарных
сигналов,
допускающих
унитарное
преобразование [см.43, разд. 2.1.7,форм. (2.5-2.7)], т.е. пространственный
поворот ансамбля в сигнальном пространстве вокруг центра, без изменения
взаимных
расстояний
между
сигналами.
Именно
унитарные
сигналы
рекомендованы в [43] для дифференциальной модуляции. Упомянутое выше
85
представление сигналов в момент времени t в виде комплексного числа будет
s(t)=S0e jφ(t), где S0–амплитуда сигнала, φ(t)=
2
u ( t ) –текущее значение фазы
L
сигнала,
значением
которое
определяется
текущим
информационного
модулирующего символа u(t). Далее, с целью воспользоваться основным
уравнением передачи (6.17), комплексными числами будем выражать также:
–Текущее значение коэффициента передачи h(t)=hejθ(t), где h–модуль
коэффициента передачи, θ(t)– текущее значение фазового сдвига, вносимого
каналом;
–Текущее значение помехи w(t)= we j( t ) , где w–модуль помехи, ξ(t)– текущее
значение фазы помехи;
– Принятый сигнал с помехой x(t)=xejψ(t), где x–модуль принятого сигнала,
ψ(t)– текущее значение фазы суммы принятого сигнала с помехой. С учетом
принятых обозначений уравнение системы передачи по каналу SISO имеет вид
x(t)= s(t)h(t) +w(t) .
(6.23)
Следует отметить, что комплексные числа, входящие в это уравнение есть,
по существу, матрицы сигнала (6.16) и канала (6.17) для случая N=M=1. С
учетом этого можно говорить, что уравнения (6.17) и (6.18) подобны и свойства
уравнения (6.18), установленные в этом разделе для рассматриваемого
простейшего случая SISO, могут быть перенесены на свойства уравнения (6.17),
которое описывает более общий случай MIMO. В дальнейшем будем полагать,
что в канале действуют квазистационарные замирания, т.е. временной ход
коэффициента замираний h(t) имеет вид непрерывной, медленно меняющейся
функции. Скорость изменения параметров замираний оценивается в таких
случаях интервалом когерентности замираний ког , который определяется
следующим орбразом. В квазистационарном канале скорость изменения
коэффициента замираний такова, что для всех моментов времени в
интервале ( t ) текущие значения коэффициента передачи остаются
неизменными.
86
т.е h ( t ) h ( t ког ) при ( t ) .
(6.24)
Отсюда следует квазистационарность временного хода фазового сдвига,
вносимого каналом
( t ) ( t ког ) при ( t ) .
(6.25)
Последующие выкладки основаны на свойстве изоморфизма множества
комплексных чисел x(t)=xejψ(t) с операцией комплексного умножения и
порождаемого этим множеством множества текущих фаз ψ(t) с операцией
обычного арифметического сложения. Иными словами, всякому произведению
[x(t1) x(t2)] соответствует cумма [ψ(t1)+ψ(t2)], что символически можно
изобразить как соответствие:
[x(t1) x(t2)]→ [ψ(t1)+ ψ(t2)] .
(6.26)
Используем процедуру комплексного сопряжения, обозначаемую знаком (*)
таким образом, что при x(t)=xejψ(t) комплексно сопряженное будет x*(t)=xe-jψ(t).
С учетом (6.26) умножению коплексно сопряженных соответствует разность
фаз:
[x*(t1) x(t2)]→ [ψ(t2) – ψ(t1)]
(6.27)
Свойства (6.26), (6.27) удобно использовать для формулировки алгоритмов
дифференциальной передачи по каналу SISO. Условие квазистационарности
канала (6.25) побуждает применить рассмотренный выше в разд.6.2 подход к
реализации
дифференциального
метода.
В
соответствии
с
основным
уравнением передачи (6.18) на приемной стороне выполним дискретизацию
полученной смеси сигнала с помехой x(t)= (t)h(t) +w(t). Шаг дискретизации
Δt выбираем из условия
t ког ,
(6.28)
которое обеспечивает возможность подавления фазовой помехи канала
дифференциальным методом. Сформируем пару отсчетов x(tn)= s(tn)h(tn) +w(tn)
и x(tn-1)= s(tn-1)h(tn-1) +w(tn-1). Пусть аддитивная помеха отсутствует(w(t)=0). Для
вычисления первой разности фаз определим произведение [x*(tn-1) x(tn)],
87
которому, в соответствии со свойством(6.22), будет соответствовать первая
разность фаз
Δ1n ψ(t)=[ψ(tn) – ψ(tn-1)]= [( t n ) ( t n ) (t n 1 ) ( t n1 )] [( t n ) ( t n 1 )] .
(6.29)
В этом выражении учтено свойство (6.25) квазистационарности фазовых
сдвигов, вносимых каналом [(t n ) ( t n 1 )] 0 . Иными словами, дискретноразностное преобразование (6.29) подавляет фазовые сдвиги, вносимые
каналом. Для завершения описания дифференциального метода необходима
формулировка алгоритма кодирования на передаче. С учетом выбранного ранее
метода фазовой модуляции (φ(t)=
2
u ( t ) ) переданное сообщение может быть
L
извлечено из первой разности следующим образом
u(t)=
2 1
2
Δ n ψ(t)=
[( t n ) ( t n 1 )] .
L
L
(6.30)
Как было показано ранее в разд.6.2, для извлечения передаваемой
информации из разности, сообщение на передающей стороне должно быть
предварительно обработано специальным алгоритмом дифференциального
кодирования, а алгоритмы разностного (дифференциального) кодирования и
алгоритм разностного (дифференциального) декодирования должны быть
взаимно согласованы подобно условию из разд.6.2 (КДКKДД=1).
Структура дифференциального кодера ДК на рис.6.2 представляет собою
структуру динамического накопителя-аккомулятора (сумматора поступающего
символа с текущей суммой). Вычислим текущую сумму( по модулю L)
n 1
u(сум)(t n-1)= u ( t i ) , и далее для следующего момента времени
i 0
n 1
u(сум)(tn)= u ( t i ) +u(tn).
i 0
Первая разность этих текущих сумм будет Δ1nu(сум)(t)=[u(сум)(tn)– u(сум)(tn-1)]=u(tn),
что и доказывает согласованность алгоритмов дифференциальной передачи для
канала SISO:
Для последовательности передаваемых иформационных символов, выбираемых
из алгебраического кольца R(L) (с операцией сложения по модулю L)
88
n 1
u(t)= u ( t i ) сформулируем
алгоритмы,
составляющие
сущность
i 0
дифференцального метода передачи:
1.Передача производится методом многопозиционной фазовой модуляции,
текущая фаза сигнала имеет вид
φ(t)=
2
u ( сум ) ( t ) ;
L
(6.31)
2.На передающей стороне информационная последовательность подвергается
предварительной обработке (дифференциальному кодированию) по правилу
n 1
u(сум)(t)= u ( t i ) ;
(6.32)
i 0
3.В квазистационарном канале с интервалом когерентности замираний ког
действует фазовая помеха, обусловленая замираниями. На входе приемной
антенны действует аддитивная флуктуационная помеха, так что уравнение
передачи имеет вид
x(t)= s(t)h(t) +w(t) ;
(6.33)
4. На приемной стороне для подавления фазовой помехи применяется
дискретно-разностное преобразование;
5. Принятый сигнал подвергается дискретизации с шагом
t ког ;
(6.34)
6. Для определения первой разности фаз вычисляется произведение комплексно
спряженных отсчетов сигнала
(x*(tn-1) x(tn));
(6.35)
7.Алгоритм(6.35) может быть реализован автокорреляционным приемником
с задержкой сигнала, равной t ;
8. Выход автокорреляционного приемника содержит первую разность фаз и
данные о переданном сообщении
Δ1nψ(t)=[ψ(tn)–ψ(tn-1)]= [( сум ) ( t n ) (сум ) ( t n 1 )]
L
u (t n )
2
(6.36)
89
6.7.Дифференциальная передача по каналу MIMO
Изложенное
выше
используем
для
разработки
алгоритмов
дифференциальной передачи по каналу MIMO. Алгоритмы ((6.32)…(6.36))
могут быть использованы, если к матричному описанию процессов в канале
MIMO применимы свойства изоморфизма (6.21). Далее полагаем, что
длительность блока, формируемого на передаче мультиплексором выбирается
из условия Т=М. Это условие не накладывает никаких ограничений на
функционирование системы передачи в целом. Такой выбор длины блока Т
облегчает математический анализ процессов. В самом деле, при Т=М все
матрицы, используемые ранее в разд. 6.4, будут иметь форматы, допускающие
процедуры матричных умножений и сложений (формат матриц (число строк х
число столбцов) указан внизу справа от значка матрицы:
1. Матрица-строка (вектор) передаваемых сообщений
n 1
U(1XM)= u1 , u 2 ,.., u i ,..u M ,ui(t)= u i (t k ) ;
(6.37)
k 0
2.Матрица передаваемых сигналов S(МxM);
3.Матрица-строка (вектор) передаваемых сигналов
S(1xM) = s1 , s 2 ,.., si ,..s M ;
(6.38)
4.Матрица коэффициентов передачи канала H(MxN);
5. Вектор шума на входах приемных антенн
W(1xN) = w1 , w 2 ,.., w j ,..w N ;
(6.40)
6. Основное матричное уравнение для системы MIMO
X(1xN)=S(1xM) H(MxN) +W(1xN)
(6.41)
7. Принятый сигнал подвергается дискретизации с шагом
t ког ;
(6.42)
8.На приемной стороне для подавления фазовой помехи применяется
дискретно-разностное преобразование;
90
9.Для определения матрицы первой разности фаз вычисляется произведение
комплексно спряженных матриц отсчетов сигнала
[X*(tn-1)X(tn)]=[S*(1xM)(tn-1)H*(MxN)(tn-1)+W*(1xN)(tn-1)]
[S(1xM)(tn)H(MxN)(tn)+W(1xN)(tn)],
которое состоит из сигнального комронента
SH={(S*(1xM)(tn-1)H*(MxN)(tn-1)S(1xM)(tn)H(MxN)(tn)}
(6.43)
и шумового компонента
SW={{ S*(1xM)(tn-1)H*(MxN)(tn-1) W(1xN)(tn)+ W*(1xN)(tn-1) S(1xM)(tn)H(MxN)(tn)}
(6.44)
10.На основе свойства изоморфизма вида (6.22) по сигнальному компоненту
(6.43) определяется первая разность матриц текущих фаз принятого сигнала
Δ1nΨ(t)=[Ψ(tn)–Ψ(tn-1)]=[φ(сум)(tn)–φ(сум)(tn-1)]=
L
U(tn)
2
(6.45)
11.Алгоритм(6.45) может быть реализован матричным автокорреляционным
приемником с задержкой сигнала, равной t .
6.8. Возможности применения внешнего корректирующего кодирования
Из анализа выхода матричного автокорреляционного демодулятора (6.44)
следует, что шумовой компонент SW определяется двумя слагаемыми в виде
произведений принимаемого сигнала и шума, действующего на входе
соответствующей приемной антенны. Эффект возрастания диперсии шума
вдвое на выходе любого автокорреляционного демодулятора известен давно.
Обычно это связывали с появлением дополнительных энергетических потерь
величиной 3 дБ. Такая же величина потерь отмечается в работе[43].
Предыдущим
анализом
установлено,
что
дифференциальный
метод
передачи позволяет в квазистационарном канале понизить влияние фазовых
помех. Дополнительным нежелательным эффектом является повышение
дисперсии шума на выходе автокоррелятора. Во многих англоязычных статьях
[42,43]предположительно говорится о возможности применения внешнего
корректирующего кодирования в каналах MIMO, цель которого–повышение
помехоустойчивости за счет применения специально подобранного кода и
91
алгоритма декодирования (обычно–алгоритм Витерби). В монографии [26]
приведены конкретные примеры сигнально-кодовых конструкций с сигналами
ФМ-8,
найденных
прямым
перебором
для
каналов
с
замираниями,
обеспечивающих энергетический выигрыш за счет кодирования (ЭВК) порядка
(4-5)дБ. Представляет интерес установить, в какой мере помехоустойчивое
кодирование может копенсировать выявленные потери автокорреляционной
обработки. С целью ответа на этот вопрос было проведено компьютерное
моделирование. Программа моделирования была разработана в пакете
прикладных
программ
визуального
объектно-ориентированного
программирования HP VEE. Испытаниям подвергался двоичный сверточный
кодер, длина колирующего регистра (ДКР) которого устанавливалась в
интервале
К=(3…7).
На
выходе
кодера
устанавливался
двоичный
дифференциальный кодер (см. рис.6.2). Т.о. образовывался «новый» кодер в
виде последовательного соединения сверточного и дифференциального
кодеров(СК-ДК). Предполагалось ,что обработка кодовых последовательностей
нового
СК-ДК
дистанционные
производится
свойства
дифференциальным
определялись
по
выходу
методом.
Поэтому
дифференциального
декодера ДД, включенного на выходе СК-ДК. Порождающие многочлены
сверточного кода устанавливались генератором случайных чисел. После
установки многочленов методом «тест-пакета», подробно описанным в [26,
разд. 6.2] определялось свободное расстояние выбранного кода СК-ДК.
Испытания
производились
циклически.
В
результате
каждого
цикла
определялась величина свободного расстояния Хэмминга dH случайно
выбранного кода. Пследовательности этих расстояний образовывали массив,
для которого вычислялось среднее расстояние dH,ср. Известно из теории
случайных чисел, что при любом распределении случайных чисел среднее есть
нижняя оценка наименьшего случайного числа. Поэтому измеренная
величина
среднего
расстояния
dH,ср
может
быть
использована
для
сравнительных оценок исследуемых кодов. Далее по величине dH,ср можно
92
определить средний энергетический выигрыш от применения кода со
скоростью R
Gср=10 lg(R dH,ср)(дБ). Результаты измерений приведены в табл.6.1
Таблица 6.1
Результаты испытаний кодов в канале с дифференциальным колированием
ДКР К
dH,ср
Gср(дБ)
3
3,9
2,9
4
5,4
4,3
5
7,7
5,8
6
9,2
6,6
7
10,3
7,2
Видно, что для достаточно длинных кодов(К>4) наименьший энергетический
выигрыш превышает потери 3дБ, обусловленные автокорреляционным
приемом.
Далее
рассмотрим
дифференциальные
методы
передачи
цифровой
информации по каналам с фазовой модуляцией и неопределенностью частоты
несущей сигнала.
6.9.Модель канала с неопределенностью частоты
Можно указать следующие причины появления неопределенности
частоты при когерентном приеме ФМ-М сигнала:
1.Расхождение частоты несущей принимаемого сигнала ωс и частоты
восстановленной несущей ω0 вследствие начального расхождения частот перед
вхождением
в
связь
и
нестабильностей
несущих
частот
сигнала
и
восстановленной несущей в процессе работы.
2. Влияние эффекта Допплера на частоту принимаемого сигнала,
обусловленное относительным движением передатчика и приемника сигнала (в
системах мобильной связи). В каждом из этих случаев будем полагать,что
расхождение частот сигнала ωс и частоты опорной несущей ω0 равно Δ ω= (ωс–
ω0). Допплеровский сдвиг частоты при относительном движении передатчика и
приемника сигнала со скоростью v составляет [32]
Δωд=(+,–) с
v
,
C
(6.46)
93
где знак выбирается в зависимости от направления перемещения («+»–
передатчик и приемник сближаются; «–»–передатчик и приемник удаляются).
С–скорость распространения радиосигнала в свободном пространстве. Наличие
расхождения частот Δω приводит к дополнительной неопределенности фазы
принимаемого сигнала, которая со временем линейно нарастает:
(t)= Δωt.
(6.47)
Этот дополнительный фазовый сдвиг накладывается на закон изменения
фазы принимаемого сигнала и затрудняет его демодуляцию. Допплеровский
сдвиг оказывает влияние в системах мобильной связи при работе на очень
высоких частотах. К примеру, при скорости v=100км/час(27,8м/с), С=300000м/с
множитель
v
в выражении(6.46) составляет92х10–6, т.е. при частоте сигнала
C
1МГц допплеровский сдвиг частоты составит 92 Гц, а при частоте 1ГГц
возрастет до величины 9200Гц. Такое расхождение частот необходимо
соразмерять со скоростью модуляции. При дискретной ФМ-М скорость
модуляции V
log 2 M
(бит/с), где Т–длительность сигнала. При расхождении
T
частот Δω в соответствии с (6.47) набег фазы сигнала на интервале Т составит
T . Эта величина при соответствующих значениях параметров может
превышать минимальный пространственный угол между сигналами =2/M.
В общем случае, при больших значениях T расхождение фаз со
временем нарастает линейно и может быть представлено дискретной
моделью как
(D) (1D1 2D 2 3D 3 4D 4 ... kD k ....) K (D) ,
(6.48)
где дискретная функция K (D) kD K отображает линейное нарастание
k 1
фазы. С учетом этого модель канала из рис.6.4 может быть дополнена
следующим образом ДК-1
(рис.6.5). f(D)
(D)
ДД-1
u (D)
D
v (D)
D
Рисунок 6.5 – Модель канала с неопределенностью частоты и начальной
94
Заслуживает внимание анализ прохождения помехи неопределенности
( D) K ( D) через дифференциальный декодер с передаточной функцией
KДД=(1–D):
Положим
u(D)=0
и
f(D)=0.
В
этом
случае
на
входе
дифференциального декодера ДД-1 действует только помеха неопределенности
частоты и результат будет таким
v(D) ( D)(1 D)
.
1 D
(6.49)
6.10.Дифференциальное кодирование второго порядка
Из формулы (6.49) следует, что к каждому символу на выходе ДД-1
добавляется
символ
неопределенности
,
влияние
которого
можно
нейтрализовать дополнительным дифференциальным кодированием. Подобное
дифференциальное кодирование (ДК второго порядка) вводится так, как это
было введено выше. На рис.6.5 показана структура канала с двумя видами
неопределенности и внешним дифференциальным кодированием (второго
порядка).
«Внутренний канал» с
дифференциальным кодированием
первого порядка ФРМ-1
ДК-2
ДК-1
D
D
f(D)
u(D)
(D)
ДД-1
ДД-2
D
D
v (D)
Рисунок 6.5 – Модель канала с неопределенностью частоты и
начальной фазы, внутренним дифференциальным кодированием(первого
Полагая нулевыми все виды помех (f(D)=0, и(D)=0) можно определить
порядка) и внешним дифференциальным кодированием(второго порядка)
прохождение
информационной
последовательности
по
цепочке
95
дифференциальных кодеров (ДК-2,ДК-1) и декодеров (ДД-1,ДД-2):v(D)=u(D). В
тоже время, в такой структуре все виды неопределенности подавляются.
Недостатком является появление символов неопределенности в самом начале
процесса дифференциального декодирования. Полагая u(D)=0, определим
результат прохождения последовательностей неопределенности через цепочку
(ДД-1,ДД-2): [f(D)+ (D)](1–D)2=(fD0+D0)(1–D)= [fD0+D0– fD–D].
Иными
словами,
на
начальном
участке
процесса
дифференциального
декодирования будут проявляться символы неопределенности, которые
подавляются в последующем.
6.11. Реализация разнесенного приема
дифференциально модулированных ФМ сигналов
Исследованиям систем MIMO посвящено немало публикаций, перечень
которых приведен в монографии [26]. Несмотря на простоту идеи, до
последнего
времени
нерешенными
являются
вопросы
упрощения
реализации алгоритмов демодуляции/декодирования сигналов в каналах
MIMO. Сведения, помещенные в фундаментальном обзоре [15], опираются на
применение в MIMO канале специальных «обучающих» пакетов для оценки
матрицы передаточной функции канала с последующей достаточно сложной
матричной
обработкой.
Недостатки
«пакетного»
варианта
(сложность
реализации, затраты пропускной способности на передачу пакетов, срыв связи
при утрате синхропакета) вызвали к жизни идеи отказа от применения
сигналов-пакетов и перехода к дифференциальным методам передачи.
Появление статей [41,42] в западной печати подтверждает эту тенденцию.
Детальное изложение теории дифференциальных методов модуляции для
MIMO каналов было изложено выше в разд. (6.4-6.7). Анализ показывает, что
применение
некогерентного
автокорреляционного
способа
выделения
передаваемых сообщений открывает прямой путь к простой реализации
разнесенного приема сигналов, передаваемых через любую антенну из набора
96
передающих
антенн
последующего
в
составе
использования
MIMO
такого
структуры
подхода
с
как
возможностями
для
повышения
помехоустойчивости передачи информации в условиях замираний, так и для
упрощения алгоритмов демодуляции.
Неизменность фазы (6.20) принимаемого сигнала в квазистационарном
канале
используем
для
автокорреляционной
подавления
обработки
фазовой
определяется
помехи.
правилом
Алгоритм
вычисления
коэффициента корреляции
T
R(T )
1
x j (t ) x j (t T )dt
T 0
(6.50)
Структура автокорреляционного демодулятора представлена на рис.6.6.
xj(t)
Интегратор
T
1
X (t ) dt
T 0
Линия
задержки
Тз=Т
xj(t–T)
R(T)
ФВр
(π/2)
Рисунок 6.6–Структура автокоррелятора
Автокоррелятор
содержит
перемножитель,
на
который
подаются
обрабатываемый сигнал xj(t) и задержанный линией задержки сигнал xj(t–T).
Время задержки выбирается равным длительности посылки сигнала (Тз=Т).
Фазовращатель ФВр на угол π/2 обеспечивает необходимое фазовое
соотношение между поступающими на перемножитель сигналами. Далее
результат
перемножения
интегрируется
интегратором
на
интервале
длительности Т. Подставляя форму принимаемого сигнала в (6.50), получаем с
учетом работы фазовращателя
R (T )
1 T 2 2
S0 hij cos[0t ij (t ) i (t )]{ sin[(0 (t T ) ij (t T ) i (t T )]}dt
T 0
97
1 T 2 2
S 0 hij sin[ 2 0 t 0T (ij (t ) ij (t T ) i (t ) i (t T )]dt
2T 0
1
S 02 hij2 sin[ij (t ) ij (t T ) i (t ) i (t T )]dt
2T 0
T
S02 hij2
20T
S02 hij2
2
(cos 20T 1) cos[ij (t ) ij (t T ) 0T i (t ) i (t T )
(6.51)
sin[ij (t ) ij (t T ) i (t ) i (t T )].
Предпоследнее слагаемое в последних строках выражения (6.51)
S02 hij2
20T
может
(cos 20T 1) cos[ij (t ) ij (t T ) 0T i (t ) i (t T )
пренебрежимо
малым
по
сравнению
с
быть
последним
сделано
слагаемым
2 2
0 ij
S h
sin[ ij (t ) ij (t T ) i (t ) i (t T )]. Действительно, при выполнении условия
2
0T 1 (на длительности посылки укладывается большое число периодов
сигнала) это слагаемое значительно меньше второго, т.е. им можно пренебречь.
Тогда получаем окончательно
R(t , T , , )
S02 hij2
2
(6.52)
sin[ij (t ) ij (t T ) i (t ) i (t T )].
Далее удобно рассматривать процессы в произвольный момент времени t=tn.
При этом аргументам задержанных сигналов будут соответствовать такие
значения дискретного времени: при (t)→(tn) будет соответствие (t–T)→(tn-1).
Основываясь на свойстве квазистационарности канала (11) отметим, что на
выходе автокоррелятора фазовая помеха подавляется ((θij(t) – θij(t+Т)=0) в
выражении (14)). Тогда результат автокорреляционной обработки будет
R (t , T , )
( S 0 hij ) 2
2
(6.53)
sin[i (t ) i (t T )].
Видно, что выход автокоррелятора содержит сведения о разности фаз
сигналов
[i (t ) i (t T )].
Это
может
быть
использовано
для
дифференциального декодирования в соответствии с выражением (6.45). Выход
автокоррелятора
пропорционален
произведению
амплитуд
замирающих
сигналов и синусу разности фаз посылок сигнала
R(t n )
( S 0 hij ) 2
2
sin[
2
ui (t n )] .
L
(6.54)
98
При передаче сообщений, выбираемых из ансамбля противоположных
символов
(ui={+1,–1}
демодулятора
вынесение
производится
по
решения
знаку
в
решающем
результата
устройстве
автокорреляционной
обработки (6.54). Фазовращатель Фвр в структуре демодулятора на рис.6.6
введен именно для получения такого знакового соответствия. Прохождение
аддитивных помех через автокоррелятор проанализировано ранее в разделе 6.6,
где
приведено
матричное
представление
шумовых
компонентов
при
автокорреляционной обработке. Так, при действии на входе автокоррелятора
сигнала с помехой результат на выходе вычисляется как произведение
комплексно спряженных матриц отсчетов сигнала (*–знак комплексного
сопряжения)
[X*(tn-1)X(tn)]=[S*(1xM)(tn-1)H*(MxN)(tn-1)+W*(1xN)(tn-1)]Х
[S(1xM)(tn)H(MxN)(tn)+W(1xN)(tn)],
Х
которое состоит из сигнального комронента
SH={(S*(1xM)(tn-1)H*(MxN)(tn-1)S(1xM)(tn)H(MxN)(tn ) )}
и шумового компонента
SW={{ S*(1xM)(tn-1)H*(MxN)(tn-1) W(1xN)(tn)+ W*(1xN)(tn-1) S(1xM)(tn)H(MxN)(tn)}}.
Шумовой компонент состоит из двух примерно равноценных сверток шума с
сигналом. Это приводит, как известно, к возрастанию вдвое дисперсии шума
по сравнению со случаем когерентной обработки. Из общей структуры системы
с каналом MIMO(MxN) на рис.6.3 видно, что такой канал состоит из M
«вложенных» каналов SIMO(1xN). Каждый такой канал включает на
передающей стороне один передатчик Ti и, соответственно, передающую
антенну с номером i (i=1..M), а также размещенные на приемной стороне N
антенн
с
приемниками
Rj(j=1…N),
которые
способны
одновременно
принимать и обрабатывать сигналы, посланные по SISO каналу (Ti → Rj).
Такая конфигурация есть не что иное, как типичная конфигурация каналов с
замираниями, допускающая организацию на приемной стороне приема с
разнесенными в пространстве приемными антеннами. Набор всех пар (Ti →Rj) в
совокупности образует SIMO(1xN)-канал. При реализации такого метода
99
разнесения по каждому каналу должна передаваться одна та же информация.
Далее полагаем, что по
производится
методом
каждому SISO каналу передача сообщений
многопозиционной
дифференциальной
фазовой
модуляции, как это было рассмотрено выше. При подаче на вход модулятора
передатчика
Ti
сообщения
ui(tn),
на
выходах
автокорреляционных
демодуляторов каждого из приемников Rj(j=1…N) будет формироваться
результат обработки, определяемый выражением(6.54)
R j (ui (t n ))
( S 0 hij ) 2
2
sin
2
ui (t n ) (j=1…N).
L
(6.55)
Рассматриваемую систему будем именовать как D-SIMO. Как видно,
отклики автокорреляторов в выражении (6.55) имеют случайные уровни,
обусловленные случайным характером коэффициентов передачи канала hij. В
этом
случае
возникает
задача
оптимального
выделения
оценки
передаваемого сообщения из набора случайных полезных компонентов(6.43),
принимаемых на фоне шумовых компонентов (6.44). В арсенале методов
объединения разнесенных замирающих сигналов имеются следующие методы:
1. Линейное сложение, при котором оценка определяется как сумма
разнесенных сигналов. Реализация линейного сложения наиболее проста.
2. Весовое сложение, при котором разнесенные сигналы складываются с
весами, пропорциональными уровням сигналов.
3. Оптимальное
весовое
сложение,
при
котором
предварительно
оцениваются отношения сигнал/шум в ветвях разнесения, после чего
сигналы
из
ветвей
разнесения
складываются
с
весами,
пропорциональными отношениям сигнал/шум в этих ветвях. Реализация
оптимального сложения наиболее сложна.
Учитывая, что, в соответствии с выражением (6.55) полезные компоненты на
выходах корреляторов «взвешены» квадратом коэффициента канала, из
перечисленных выше методов объединения следует выбрать линейное
сложение. Это обеспечит простоту реализации, и в данном случае будет
100
фактически реализован метод весового сложения. Результат сложения будет
определяться линейной суммой выходов всех N автокорреляторов
N
R [ui (tn )] R j (ui (tn ))
j 1
S02 N 2
2
S2
2
[ hij ] sin
ui (tn ) 0 hij2 sin
ui (tn ) .
2 j 1
L
2
L
(6.56)
В этом выражении используется результат сложения квадратов коэффициентов
передачи всех N SISO каналов, входящих в состав анализируемого
D-SIMO(1xN) канала
N
hij2 hij2 .
(6.57)
j 1
Общая структура канала D-SIMO(1xN) приведена на рис. 6.7. Видно, что объем
разнесения в такой структуре канала равен количеству участвующих в передаче
SISO каналов,т.е. V=N.
При прохождении через замирающий SISO канал на регулярную составляющую
сигнала накладывается случайный компонент замираний. В сумматоре
регулярные составляющие складываются (накапливаются), а случайные
компоненты усредняются. Значение выигрыша от применения метода
разнесения может быть установлено с учетом статистических характеристик
u(t)
Сумматор выходов АК
демодуляторов
H
Передатчик
модулятор
ДФМ
N антенн,приемников,
автокорреляционных демодуляторов
замираний в парциальных каналах SISO.
Выход
Рисунок 6.7–Структура канала D-SIMO(1xN)
Согласно данных раздела 2.3 cтатистические характеристики замираний
узкополосных (narrowband) сигналов в системах беспроводного доступа
101
описываются в виде модели, учитывающей наличие в точке приема регулярной
составляющей с амплитудой h0 и случайной составляющей с дисперсией σ2.
Плотность вероятности результирующего сигнала h рекомендовано описывать
райсовской функцией плотности вероятности:
p (h)
2
h
exp[
2
h 2 h0
hA
]I 0 ( 2 )
2
2
для h>0, h0>0,
и p(h)=0
(6.58)
для других h, h0.
Отношение мощностей регулярной и случайной составляющих сигнала в
западной литературе [15,18] принято описывать коэффициентом K=h20/2σ2. В
обзорной статье [15] приводятся примеры экспериментальных данных по
коэффициенту K для двух крайних значений: K=16дБ(пример для пригорода
SU-1 с плотной застройкой и интенсивной растительностью); и K=0дБ(пример
для пригорода SU-6 с низкими застройкой и растительностью). Для
определения
эффективности
применения
описанного
выше
метода
разнесенного приема в канале D-SIMO(1xN) было проведено моделирование с
использованием
возможностей
пакета
объектно-ориентированого
программирования HPVEE. На рис.6.8 и 6.9 приведены соответствующие
иллюстративные диаграммы.
Рисунок 6.8–Зависимость случайного коффициента передачи передачи SISO канала h от
номера канала j в пределах j=(1…N) (пунктир–средний уровень h0=0.5).
Коэффициент K=h20/2σ2=3дБ
Большое число каналов в примерах (N=100) выбрано для иллюстрации
статистических тенденций предлагаемых в статье методов разнесения. Эти
тенденции хорошо «проявляются» при большом числе каналов. В частности, на
102
рис.6.8 видно, что среди 100 испытанных SISO каналов можно отметить ряд
«проваленных» каналов (например, коэффициенты передачи каналов h с
номерами (23 и 80) не превышают отмеченного пунктиром среднего уровня
(h<h0)). В то же время, в окрестностях таких каналов можно отметить
«благополучные» каналы, в которых выполняется обратное условие (h>h0).
Отсюда следует возможность повышения помехоустойчивости в каналах с
замираниями за счет реализации метода разнесения на основе линейного
сложения выходов ряда каналов в соответствии с формулой(6.57), когда в
сумму могут входить рядом расположенные каналы. В этом случае возникает
вопрос о количестве каналов N, входящих в такие суммы и о величине
выигрыша в помехоустойчивости, который будет обеспечивать предлагаемый
метод разнесения. При оценке выигрыша необходимо учитывать следующее:
1.Если случайный модуль коэффициента передачи канала имеет вид h=h0+∆h
(h0–математическое ожидание, ∆h–случайное приращение, обусловленное
замиранием), то уровень выхода актокоррелятора будет
( S 0 h) 2 1
(S h )2
( S h ) 2
.
( S0 h0 S0 h) 2 0 0 S 02 h0 h 0
2
2
2
2
В этом выражении первое слагаемое
( S0 h 0 ) 2
есть
2
(6.59)
полезный регулярный
компонент, величина которого определяется амплитудой передаваемого
сигнала S0 и регулярной составляющей коэффициента передачи канала h0.
Второе и третье слагаемые ( S02 h0 h
( S 0 h) 2
) зависят от случайного приращения
2
∆h, обусловленного замиранием. В результате накопления уровень полезного
( S0 h0 ) 2
(S h )2
N 0 0 .
2
2
j 1
N
неслучайного компонента возрастает в N раз:
2.При накоплении результатов с выходов автокорреляторов в сумматорах
накапливаются также собственные шумы приемников. Из теории обработки
методом накопления повторяющихся регулярных сигналов, принимаемых на
фоне аддитивной флуктуационной помехи, известно, что амплитуда сигнала
возрастает в N раз (N–число повторений) и, соответственно, мощность
103
накопленного сигнала возрастает в N2 раз), а шумы накапливаются по
дисперсии(дисперсия накопленного шума возрастает только в N раз), что и
определяет выигрыш по величине отношения мощностей сигнал/шум
метода накопления, равный N.
3.Фактическая величина выигрыша в отношении сигнал/шум может быть
определена на основе моделирования. На рис.6.9 приведены результаты
Выигрыш
в ОСШ
моделирования.
Рисунок 6.9–Зависимости выходов сумматора автокорреляторов SISO каналов от числа
суммируемых каналов j в пределах j=(1…N)
На рис.6.9 обозначено:
Линия–*–*– результат накопления полезной составляющей (S0h0)2
Линия–x–x– результат накопления мощности шума W2
Коэффициент K=h20/2σ2=3дБ.
Видно,что результаты накопления полезной составляющей сигнала(S0h0)2и
дисперсии помехиW2 с увеличением числа складываемых каналов N
возрастают. Одновременно увеличивается их различие, которое определяет
величину выигрыша в отношении сигнал/шум ОСШ.
В то же время, судя по незначительным колебаниям хода кривой полезной
составляющей замирания в каналах SISO сказываются незначительно. Для
практической реализации большое число каналов N 100 может оказаться
неприемлимым. На рис.6.10 даны результаты моделирования для малых
104
значений N. Видно,что и в этом случае разнесение с использованием линейного
сложения каналов дает определенный выигрыш.
Рисунок 6.10–Зависимости выходов сумматора автокорреляторов SISO каналов
от числа суммируемых каналов j в пределах j=(1…9). Обозначения кривых
совпадают с обозначениями для рис.6.9
На основе описанного выше метода разнесенного приема дифференциально
модулированных ФМ сигналов получен патент на изобретение «Система
передачи информации по каналам многоантенной радиосвязи в условиях
замираний» [45]. Изобретение относится к технике телекоммуникаций и может
быть использовано в устройствах передачи цифровой информации по
радиоканалам с замираниями сигналов.
Известен способ помехоустойчивой передачи информации по многолучевым
радиоканалам с замираниями сигналов, предложенный впервые в статье [32],где
предложено окружить среду многолучевого распространения радиосигналов
множеством
передающих
и
приемных
антенн,
соответствующим
образом
организовать передачу и, соответственно, прием (рис.6.11). В последующем эта
идея многократно исследовалась и использовалась на практике. В литературе для
обозначения таких каналов с разнесением как на передаче, так и на приеме
используется термин MIMO (Multiple Input, Multiple Output–множественный вход,
множественный выход). Подробный обзор методов передачи информации по MIMO
105
каналам опубликован в статье [35]. Недостатком всех известных методов приема
сигналов в каналах MIMO, описанных в многочисленной литературе [35], является
сложность алгоритмов обработки сигналов, получаемых с выходов приемных
антенн. Более того, во всех вариантах опубликованных алгоритмов предполагается
использование когерентного приема, что увеличивает сложность алгортмов. В
многочисленных публикациях по проблематике каналов MIMO
[41,42 и др.] обращается внимание на необходимость отказа от когерентного
приема с целью упрощения оборудования и перехода к методу передачи, не
требующего применения когерентного приема.
Известен метод фазоразностной модуляции [39] при которой информация о
передаваемых символах в фазоразностном модуляторе закладывается в
разность фаз соседних посылок передаваемого сигнала с фазовой модуляцией
(ФМ) несущей. Выделение информации на приеме производится путем
измерения разности фаз соседних посылок в фазоразностном демодуляторе
(автокорреляторе), содержащем перемножитель, на первый вход которого
подается принимаемый сигнал, а на второй вход подан принимаемый сигнал
через линию задержки на длительность элемента сигнала, причем, выход
перемножителя подан на интегратор на интервале длительности посылки
сигнала. В фазоразностном демодуляторе для каждого данного принимаемого
символа опорным является предыдущий принятый символ, что позволяет
избежать необходимости применения когерентного приема. Известно также,
что применение автокорреляционного метода обработки ФМ сигнала относят к
разряду некогерентных методов, не требующих восстановления несущей в
демодуляторе для когерентного приема. Известно также, что такое упрощение
процедуры демодуляции оплачивается снижением помехоустойчивости: за счет
двухкратного проникновения шумов на пермножитель. Выходное отношение
сигнал/шум некогерентного демодулятора на 3дБ оказывается ниже, чем
выходное отношение сигнал/шум когерентного демодулятора.
Известен
метод
помехоустойчивого
кодирования
–
сверточное
кодирование с декодированием по алгоритму Витерби [26]. Кодер сверточного
106
кода содержит n выходов, которыми его подключают к n входам модулятора
канала. Известно, что применение помехоустойчивого кодирования позволяет
получить определенный энергетический выигрыш кодирования (ЭВК),
равный величине отношения сигнал/шум (С/Ш) в канале, на которую можно
понизить отношение С/Ш на входе декодера при введении кодирования.
Обычно величина ЭВК составляет =(4-7)дБ. При реализации декодера
Витерби необходимо решать задачу ветвевой синхронизации, состоящую в
определении границ ветвей в потоке принимаемых символов сверточного
кода.
Известно применение кодов Баркера в качестве синхронизирующих
последовательностей при организации пакетной передачи данных [46]. Обычно
последовательность Баркера передается в начале пакета данных. Обнаружение
кода Баркера на приеме производят согласованным фильтром, устанавливая
тем самым временные границы пакета и начало пакета данных. Подробное
описание т.н. композитного кода Баркера приведено в Приложении Б.
Известен пособ объединения сигналов с выходов N разнесенных антенн,
поступающих по каналам с замираниями от одного из передатчиков систем
многоантенной радиосвязи MIMO, отличающийся тем, что с целью повышения
помехоустойчивости и упрощения процедуры обработки принимаемого сигнала
выходы разнесенных антенн линейно складывают, причем, в результате
накопления мощность регулярной составляющей замирающего сигнала
возрастает в N2 раз, флуктуационные изменения замирающего сигнала
усредняются, а результирующая дисперсия накопленных шумов входов антенн
возрастает только в N раз, что и обеспечивает выигрыш в отношении
сигнал/шум по мощности такого способа объединения, равный количеству
приемных антенн N. Предложен способ передачи информации по каналам
многоантенной радиосвязи (MIMO), которые оборудованы на передающей
стороне M передатчиками (с модуляторами), подключеными выходами к M
передающим антеннам, и также каналы MIMO оборудованы на приемной
стороне N приемниками (с демодуляторами), входы которых подключены к N
107
приемным антеннам, отличающийся тем, что для обеспечения процесса
передачи информации по каналу использован пакетный формат передачи в виде
пакетов, состоящих из М фрагментов (см. рисунок 6.11),
СС
СК-1
СК-2
СК-n
М фрагментов пакета
Рисунок 6.11– Структура пакета
и, кроме того, с целью упрощения процедуры демодуляции применена
дифференциальная фазовая модуляция, а также, с целью повышения
помехоустойчивости применено помехоустойчивое кодирование сверточным
кодом с n выходами для кодовых символов и алгоритмом декодирования
Витерби, причем:
1.Каждый модулятор на передаче выполняет функцию фазоразностного
модулятора;
2.Каждый демодулятор на приеме выполняет функцию фазоразностного
демодулятора;
3. Первый фрагмент пакета использован для передачи синхросигнала в виде
кода Баркера;
4.Все последующие фрагменты пакета из общего числа фрагментов n=(М–1)
используют для передачи кодовых символов с n выходов кодера сверточного
кода, чем и достигается временное разделение процесса передачи: в каждый
момент времени, который следует за первым (синхронизирующим) фрагментом
передаются методом фазоразностной модуляции символы ветвей сверточного
кода;
5.Для
получения
дифференциальных
символов
переданного
демодуляторов
накопление замирающего сигнала;
линейно
пакета
выходы
складывают,
всех
N
реализуя
108
6. Суммарный сигнал с выходов дифференциальных демодуляторов подают на
согласованный
фильтр,
согласованный
с
сигналом
синхронизации.
Временную отметку обнаружения синхросигнала в приемнике используют не
только для временной разметки принятых пакетов (выделения символов кодовых
ветвей), но и для ветвевой синхронизации декодера Витерби.
На рис.6.11 показана структура пакета, обозначения:
СС–сигнал синхронизации;
СК-1,СК-2,…СК-n –фрагменты пакета, предназначенные для передачи кодовых
символов с выходов кодера сверточного кода с номерами (1,2,…n).
На рис.6.12 представлены результаты моделирования пакетного способа.
Показан процесс на выходе фильтра, согласованного с синхросигналом (код
Баркера) при подаче на вход фильтра пакета вида рис.6.11: вертикальный
выброс–временная отметка синхросигнала (начало пакета), набор случайных
выбросов–отклик фильтра на содержимое пакета.
Рисунок 6.12–Результаты обнаружения синхросигнала в начале пакета
На рис.6.13 представлена структура, реализующая предлагаемый способ
передачи. Общая конфигурация канала многоантенной радиосвязи MIMO,
оборудованого на передающей стороне M передатчиками (с модуляторами) и на
приемной стороне N приемниками (с демодуляторами) совпадает со структурой
рис.3.1. Для формирования пакета в соответствии с рис.6.3 на передаче
добавлены:
формирователь
информационного
пакета(Форм.ИП)
и
109
формирователь
синхросигнала(Форм.СС).
Выход
формирователя
информационного пакета подан на вход сверточного кодера. Процессы на
рисунках перенумерованы. Работа структуры, реализующей предлагаемый
способ при скорости СК R=1/2(n=2)показана на рис.6.13,6.15. На передаче
передаваемая информация формирователем ИП разбивается на пакеты(2). На
двух выходах кодера СК образуются пакеты кодовых символов(3): СК-1
и
СК-2.
Одновременно
формирователь
синхросигнала(СС)
формирует
синхросигнал(1). Формирователь пакета в канал образует из них единый
пакет(4), соответствующий форме рис.6.11.
Мультиплексор под управлением этого формирователя(линия управления
показана пунктиром) направляет фрагменты канального пакета на
дифференциальные модуляторы и антенны по правилам:
Синхосигнал→ДМ-1;
Вых СК-1→ДМ-2;
Вых СК-2→ДМ-3.
Таким образом, реализуется временное разделение пакетов кодовых
символов (т.е. всякий раз имеет место модель канала SIMO, когда работает
только один передатчик).
Дифференциальный демодулятор ДД в каждом из каналов приема может
быть реализован следующим образом. Пусть на интервале длительности
посылки Т заданы посылки сигналов с одинаковой частотой 0 , разными
амплитудами и начальными фазами:
s1 (t ) S1 cos(0t 1 ) ,
(6.60)
s 2 (t ) S 2 cos(0t 2 ) .
1
3
2
4
Форм. СС
Форм. ИП
Форм.пакета
в канал
Кодер
СК
110
Структура коррелятора, реализующего этот алгоритм, показана на рис.6.14
S1(t)
Интегратор
на интервале
Т
S2(t)
В1,2(T
)
111
Рис.6.14–Коррелятор
Подставляя (6.60) в (6.61) получаем
T
R1, 2
1
1 T
s1 (t ) s2 (t )dt S1S 2 cos(0t 1 ) cos(0t 2t ) dt
T 0
T 0
T
1 T
1
S1S 2 cos( 2 0 t 1 2)dt
S1S 2 cos(1 2 ) dt.
2T 0
2T 0
В этом выражении при выполнении условия 0T 1 (на длительности посылки
укладывается большое число периодов сигнала) первое слагаемое значительно
меньше второго, т.е. им можно пренебречь. Тогда получаем окончательно
R1, 2
S1S 2
cos(1 2 ).
2
(6.62)
Видно, что выход коррелятора содержит сведения о разности фаз
сигналов (1 2 ). Это может быть использовано для вычисления конечных
разностей в дифференциальных методах передачи. Выход коррелятора
пропорционален произведению амплитуд сигналов и косинусу разности фаз
посылок сигнала. Для накопления принятых сигналов выходы всех диф.
демодуляторов складываются. Обнаружитель синхросигнала содержит согл.
фильтр,
согласованный
с синхросигналом.
В результате прохождения
синхросигнала на выходе СФ появляется выброс (см. рис.6.12). Положение
этого синхровыброса позволяет указать положения моментов отсчета
выходов в демультиплексоре (пунктир «отсчет» на рис.6.13) и тем самым
разделить
выходы (6) кодовых символов для подачи на декодер СК.
Фактически,выходы СК-1 и СК-2 образуют кодовую ветвь. Т. е. таким образом
решается задача ветвевой синхронизации. Временные диаграммы процессов
в схеме на рис.6.13 показаны на рис.6.15. Номера пакетов сответствуют
номерам,отмеченным на рис.6.13.
1-Синхросигнал
2-Инф.пакет
112
6.11. Демодуляция дифференциально модулированных
многочастотных ФМ сигналов с использованием активных фильтров
Современный
характеризуется
этап
широким
развития
телекоммуникационных
использованием
технологий
систем
широкополосной
беспроводной радиосвязи. Особенностью каналов таких систем является
наличие
замираний,
обусловленных
многопутевым
распространением
радиосигнала. Развитие методов передачи информации по каналам с
замираниями прошло ряд этапов [26]. Простым методом передачи информации
по каналам с замираниями сигналов является метод разнесения. В последние
годы используется новый метод разнесения MIMO (Multiple Input, Multiple
Output–множественный вход, множественный выход), подробное исследование
которого дано в работе [36], где предложено использование в каналах систем
MIMO дифференциальной фазовой модуляции (ДФМ). Наряду с этими
методами для передачи информации по каналам с частотно-селективными
замираниями широко используются многочастотные сигналы ортогонального
частотного
мультиплексирования
OFDM,
подробно
исследованные
в
обширных западных монографиях [50,51]. В отечественной литературе
преимущества многочастотных сигналов на базе множества ортогональных
113
гармонических сигналов-переносчиков применительно к задачам передачи
информации по каналам с ненормируемыми характеристиками исследованы в
монографиях
[56,57].
Здесь
же
отмечалась
реализации
приемно-передающего
«техническая
оборудования»
сложность
систем
с
такими
сигналами. В настоящее время многочастотные сигналы OFDM широко
используются в стандартах современных технологий радиодоступа WiFi(IEEE
802.11), WiMAX(IEEE 802.16) и LTE, причем трудности реализации удается
обойти за счет применения алгоритмов преобразования Фурье(обратного
преобразования на передаче, и прямого – на приеме) [51]. К тому же следует
отметить, что в многих вариантах реализаций демодуляция сигналов
поднесущих осуществляется когерентными методами, что требует передачи
специальных пилот-сигналов для фазовой синхронизации. Вместе с тем, в
истории
развития
техники
многочастотных
сигналов
для
каналов
с
замираниями имеется прекрасный пример «комплексного решения» задачи
передачи информации по каналам с замираниями – разработка в период 19601970г.г. специалистами школы А.М.Заездного аппаратуры МС-5 для передачи
дискретной информации по КВ каналам с частотно-селективными замираниями
[39], в которой предусматривалось:
–Применение многочастотных сигналов с дифференциальной модуляцией
(ДФМ) (по терминологии [39]– c фазоразностной модуляцией) каждой
поднесущей;
–Отказ от когерентного приема и реализация оптимальной некогерентной
демодуляции ДФМ на основе т.н. «активных фильтров»(АФ).
С тех пор теория и техника передачи дискретной информации в своем
развитии претерпели существенный прогресс: повсеместно используются
многопозиционные
сигналы
для
повышения
скорости
передачи
и
корректирующие коды для обеспечения высокой помехоустойчивости в
сочетании с новыми методами разнесения (пространственно-временное
кодирование[26], например). Авторам идей, заложенных в МС-5, эти новации
были, конечно, неведомы. Поэтому целесообразно обратить внимание на путь,
114
пройденный разработчиками МС-5. Сочетание «старых» идей с новыми
подходами в перспективе может оказаться продуктивным. В этой связи в
пособии излагается углубленное исследование структуры и характеристик
основного элемента упомянутых методов и аппаратуры– активного фильтра.
В монографии[39] постулируется оптимальность алгоритма некогерентной
демодуляции сигналов дифференциальной ФМ, которая реализуется активным
фильтром. Рассмотрим подробнее алгоритм работы АФ. Общая структура
модема ДФМ сигналов приведена на рис.6.16. В модуляторе поток
передаваемых информационных символов u отображается в символы фазы
передаваемого ФМ сигнала с частотой 0 и начальной фазой 0
S (t , u n ) S 0Cos (0t n 0 )
(6.63)
по правилу дифференциального кодирования фазы
n n1 n .
(6.64)
Здесь n un –текущее приращение фазы сигнала, –индекс фазовой
модуляции. В зависимости от индекса ФМ и алфавита информационных
символов u текущее приращение фазы сигнала может принимать одно из
множества возможных значений
{ { 0,..., i ,..., m } ,
(6.65)
образуя алфавит приращений фазы m-позиционной дифференциальной фазовой
модуляции ДФМ-m. Правило (6.64) удобно для пояснения устойчивости ДФМ к
медленным изменениям текущей фазы сигнала. Пусть фаза сигнала (6.63) на
соседних интервалах получает при прохождении через канал постоянное
приращение kан , так что принятые из канала значения фазы будут
~
~
n n kан ; n1 n1 kан .
Вычисление первой разности фаз 1
для двух последовательных моментов
времени дает результат, в котором фазовая помеха канала kан оказывается
подавленной:
~ ~
1n n n 1 un .
(6.66)
115
Это свойство устойчивости метода ДФМ к изменениям текущей фазы
сигнала обосновывает интерес к исследованию адэкватных методов обработки
ДФМ, в частности, к применению активных фильтров, реализующих, по
утверждению автора монографии [39], оптимальный некогерентный прием
ДФМ
сигналов.
Рассмотрим
доказательство
оптимальности.
Пусть
в
демодуляторе имется возможность оценить тем или иным способом текущую
фазу x принимаемого сигнала X(t) относительно некоего опорного колебания с
произвольной фазой. (На рис.6.16 это отражено блоком вычислителя функций
{ sin x , cos x }.
Затем,
в
следующем
блоке
производится
вычисление
тригонометрических функций от первой разности фаз { sin1x , cos 1x }. Задача
демодуляции формулируется так: найти алгоритм, согласно которому каждой
паре { sin x , cos x } будет ставиться в однозначное соответствие разность фаз i
из совокупности всех возможных вариантов (6.65). Иными словами, по
принятой первой разности фаз 1 x следует определить, какая разность фаз из
набора
возможных
разностей
(6.65)
была
передана.
Как
известно,
статистической теорией различения сигналов для реализации алгоритма
оптимального различения рекомендуется применение решения по максимуму
апостериорной вероятности. Пусть для всех гипотез о передаче разностей i
из набора (6.65) известны апостериорные вероятности P(i / 1 x ) (i=1…M).
Рассматривая гипотезы о передаче разностей i и j , следует вынести
решение о передаче разности i при выполнении неравенства
P ( i / 1 x ) P ( j / 1 x ) (для всех j j ),
(6.67)
или, при выполнении подобного неравенства, выраженного через функции
правдоподобия (условные плотности вероятности)
W (1 x / i ) W ( 1 x/ j ) ,
или, что то же самое, через плотности вероятности разностей
W (1 x i ) W (1 x j ) .
(6.68)
116
Если функции W (1 x i ) (i=1…M) –четные и монотонно убывающие
функции относительно точек ( 1 x i ) 0 , то неравенство (6.68) можно
заменить правилом, в котором вместо плотности вероятности используется
любая четная и монотонно убывающая функция, например, косинусоидальная
функция. С учетом этого получаем следующее правило выбора переданной
разности фаз i
cos(1 x i ) cos(1 x j ) .
(6.69)
Раскрывая левую и правую части этого нравенства по правилам тригонометрии
получим
cos 1 x cos i sin 1 x sin i cos 1x cos j sin 1 xsin j
(6.70)
Декодер на рис.6.16 предназначен для отображения решений по этим
правилам в значения оценок переданной разности фаз в оценки переданных
сообщений ui .
ui
Модулятор
ДФМ
un n
Измеритель
X(t) sin x
cos x
Вычислитель
Декодер
sin1 x
cos 1x
Рисунок6.16–Структура модема ДФМ сигнала
Оценка ui
Таким образом, в соответствии с алгоритмом (6.70) основными операциями
при демодуляции ДФМ сигналов есть операции вычисления значений
тригонометрических функций sin(x), cos(x) первых разностей фаз. Вычисления
разностей фаз по принятым сигналам X(t) будем производить на основе
геометрических представлений сигналов в виде векторов функционального
пространства Гильберта. Обозначим
X n x(t ) при ( n 1)T t nT ,
X n1 x(t ) при ( n 2)T t (n 1)T .
117
В этом векторном пространстве можно вычислить тригонометрические
функции углов для подстановки в неравенство (6.70)
(X X )
( X *n X )
cos nx n n1 , sin n x n1 .
X n X n1
X n X n1
(6.71)
Здесь использованы скалярные произведения и нормы векторов, причем
X *n –вектор, соответствующий преобразованному по Гильберту сигналу xn*(t).
Конкретная реализация алгоритмов демодуляции зависит от способов
вычисления скалярных произведений в (6.70), которые могут быть реализованы
в виде интегральных сверток
( X n X n1 )
nT
x(t ) x(t T )dt ,
(6.72)
( n 1)T
( X *n X n1 )
nT
x (t ) x(t T )dt .
*
( n 1)T
В конечномерном случае удобно воспользоваться проекциями векторов X n
и X n1 на вспомогательные векторы f i (t ) , f *i (t ) (функции fi(t),fi*(t))
( X ( n 1) f i )
( X n fi )
X n ,i
, X ( n1),i
,
fi
fi
(Yn fi )
,
Yn ,i
fi
Y( n1),i
(Y( n1) f *i )
fi
(6.73)
.
Для некогерентного приема выберем в качестве вспомогательных функций
гармонические колебания с некоторой фиксированной частотой 0
f i (t ) sin 0t , f *i (t ) cos 0t
При этом скалярные произведения будут равны
T
T
X n xn (t ) sin 0tdt , X n1 xn1 (t ) sin 0 tdt ,
0
0
T
T
(6.74)
Yn xn (t ) cos 0tdt , Yn 1 xn1 (t ) cos 0tdt .
0
0
Соответственно, скалярные произведения в числителях формул для
вычисления тригонометрических функций первых разностей фаз в (6.70) будут
118
*
( X n X n1 ) X n X n1 YnYn1 , ( X n X n1 ) X n1Yn X nYn1 .
(6.75)
Алгоритмы формирования максимально правдоподобных оценок вида
(6.69), и (6.70) использованы в монографии [39] для вынесения т.н. «жестких»
решений (т.е. решений о передаваемых дискретных символах (двоичных,
например, см. [39, (1.103)…(1.106)]). Ориентируясь на демодуляцию ДФМ
активным фильтром с выдачей на выходе т. н. «гибких» решений (для
применения в последующем оптимальной обработки гибких решений,
например, усреднения решений за счет процедуры накопления и использования
внешнего сверточного кодирования с применением алгоритма Витерби)
сформулируем алгоритм демодуляции ДФМ с гибким выходом. Сопоставим
левые и правые части неравенств (6.69) и (6.70). Знаки соответствия отмечены
стрелками
P( i / 1x ) [cos 1 x cos i sin 1 x sin i ] ,
P ( j / 1 x ) [cos 1 x cos j sin 1x sin j ] .
(6.76)
Видно, что величины справа в (6.76), пропорциональные апостериорным
вероятностям разностей i и j формируются по сходным правилам, которые
можно принять, как алгоритм оптимальной демодуляции ДФМ с гибким
решением, т.е.выходом демодулятора будем считать
VГР ( x , i ) cos 1 x cos i sin 1 x sin i .
(6.77)
Подставляя в это выражение вместо тригонометрических функций скалярные
произведения из (6.73) получаем алгоритм
1
VГР ( x ,i ) {( X n X n1 ) cos 1i ( X *n X n1 ) sin 1i } ,
X n X n1
(6.78)
который можно выразить в форме, удобной для реализации
VГР ( x ,i ) C{( X n X n1 YnYn1 ) cos i ( X n1Yn X nYn1 ) sin i } .
(6.79)
1
. Величина С не зависит от номера гипотезы i ,
X n X n1
Здесь постоянная C
по которой формируется апостериорная вероятность. Значение разности фаз
i
в
этих
алгоритмах
играет
своеобразную
роль
«масштабного»
119
коэффициента, величина которого зависит от индекса ФМ и информационного
символа
ui
из
апостериорная
алфавита
(6.65),
вероятность.
относительно
Значения
которого
скалярных
вычисляется
произвелений
X n , X n1 , Yn , Yn1 вычисляются по формулам (6.72). Структурная схема активного
фильтра приведена на рис.6.17. Фильтр содержит корреляторы, в которых
вычисляются скалярные произведения входного сигнала X(t) с гармоническими
опорными колебаниями sin 0t и cos 0t , которые вырабатываются опорным
генератором ОГ.
Т–линии задержки выходов корреляторов на время, равное длительности
посылок ДФМ сигнала.
X
T
Xn x X n-1
0
2
X
cos i
Yn xYn-1
ОГ
+
Xn xY nX n-1
xY
+
sin i
Сумматор
X(t)
T
Рисунок 6.17– Структура активного фильтра
Выход АФ
V(t)
Алгоритм оптимальной демодуляции двоичных сигналов ДФМ-2 с жестким
решением нетрудно получить из общего алгоритма (6.77). При передаче
информационных символов un 0 и un 1 и индексе фазовой модуляции
алфавит возможных приращений фазы сигнала (6.65) будет { 0 0,..., 1 } .
При этом все возможные значения выхода
демодулятора с гибким решением (6.67) будут располагаться в этом интервале
{0... } . Для вынесения жесткого решения разобьем весь возможный интервал с
120
помощью границы
2
2
на два подинтервала {0... } и { ... } . Это позволит
2
сформировать жесткие решения по правилам
2
2
При {0 [V ГР( x , i )] } решение 0 0 и un 0 ,
2
2
При { [VГР ( x , i )] } решение 0 и un 1 .
(6.80)
Этот же результат можно получить из алгортма (6.67) с помощью знаковой
функции sign(x). Подставим в алгоритм (6.67) значения тригонометрических
2
2
функций cos 1 и sin
0 . Результат–алгоритм жесткого решения– будет
иметь вид
VЖР ( x ,i ) sign C{( X n X n1 YnYn1 )} .
(6.81)
Отметим, что в цитируемой ранее монографии получен именно такой алгоритм
[39, ф.(3.11)]. Избирательные свойства активных фильтров определяются
фильтрующим (усредняющим) действием интеграторов в (X,Y) каналах
корреляторов. Действительно, при подаче на входы перемножителя Y канала
сигнала cos с t и опорного колебания cos 0t с частотой 0 c , смещенной
относительно частоты сигнала на величину , на выходе интегратора
получаем
T
IY=
=
T
1
1 T
1
cos ct cos(c )tdt
cos( 2c )tdt
cos tdt =
0
T0
2T
2T 0
1
2T (2c )
sin( 2c )T +
1
sin T .
2T
(6.82)
При обработке высокочастотных сигналов ( cТ 1) первым слагаемым в
результате
(6.70)
можно
пренебречь.
Тогда
корреляторов АФ определяет второе слагаемое
фильтрующие
свойства
sin T
, которое обращается в
2 sin T
ноль при расстройке частоты опорного колебания корреляторов
k
T
(k= (1,2,3…)).
(6.83)
121
Анализ показывает, что коррелятор в канале Х проявляет такие же свойства
избирательности. Селективные свойства АФ проверены экспериментально на
модели
фильтра,
разработанной
средствами
пакета
визуального
программирования Agilent HPVEE. Результаты моделирования приведены
нарис.6.18 и рис.6.19.
Рисунок 6.18– Зависимость отклика на выходеАФ с частотой
опорного генератора F0 2000 Гц от частоты сигнала ДФМ-2,
изменяемой в диапазоне (1500-2500)Гц. Масштаб по вертикалилогарифмический
Для выяснения селективных свойств АФ на вход фильтра, реализующего
алгоритм (6.69) с частотой опорного генератора F0 2000 Гц подавался сигнал
ДФМ-2 с частотой Fc , изменяемой в диапазоне (1500-2500)Гц. На рис.6.18 по
вертикали отложены абсолютные значения выхода АФ VЖР {( X n X n1 YnYn1 )} .
На такой своеобразной «частотной» характеристике видны избирательные
122
свойства исследуемого устройства, которые позволили автору[39] назвать его
«фильтром»:
– Наличие главного максимума на частоте опорного генератора F0 2000 Гц;
–Наличие
нулей,
повторяющимся
расположение
которых
частотам(6.71).
соответствуют
Исследование
перидически
характеристики
избирательности АФ в районе главного максимума и нулей показало
отсутствие «острой» избирательности (рис.6.19): ход кривых в отмеченных
точках достаточно плавный. Эти данные могут служить для обоснования
требований к точности поддержания частоты опорного генератора АФ
0 относительно частоты ДФМ сигнала c .
Рисунок 6.19– Зависимость отклика на выходеАФ с частотой
опорного генератора F0 2000 Гц от частоты сигнала ДФМ-2,
изменяемой в диапазоне(2000-2100) Гц. Масштаб по вертикалилинейный
Отказ от использования когерентного метола демодуляции и переход к
некогерентному детектированию могут служить основанием для ухудшения
123
помехоустойчивости и требуют проведения детального анализа. Такой анализ
помехоустойчивости выполнен в монографии [39, разд.3.3]. Проведено
сравнение энергетических затрат на обеспечение заданной вероятности ошибки
при когерентном, оптимальном некогерентном методах демодуляции сигналов
ДФМ-2. Результаты сравнения для случая аддитивной гауссовой помехи
приведены в табл.6.2 [39, табл.3.2].
Таблица 6.2
Энергетические потери при переходе от когерентного к оптимальному
некогерентному приему сигналов ДФМ-2
Вероятность ошибки
Энергетические потери (дБ)
демодуляции
10-1
0,9
10-2
0,72
10-3
0,59
10-4
0,51
-5
0,45
10
Как видим, энергетические потери оптимального некогерентного приема не
превышают 1,0 дБ в широком диапазоне изменения вероятности ошибки. Это
дало основание автору монографии [39, с.88] заявить, что эти данные
«..Количественно подтверждают важный в теории ФРМ тезис о том, что для
высококачественного
приема
ФМ
колебаний
совсем
не
обязательно
располагать когерентным с сигналом опорным колебанием.». Следуя традиции
применения
помехоустойчивого
кодирования
в
современных
телекоммуникационных системах целесообразно оценить эффективность
применения внешнего сверточного кодирования в сигнально-кодовой
конструкции (СКК), содержащей на внутренней ступени модулятор сигналов
124
ДФМ-2, и активный фильтр, реализующий демодуляцию ДФМ с жестким
решением (алгоритм(6.69)).
На внешней ступени такой СКК предполагается использование сверточного
кода с декодированием по алгоритму Витерби. Энергетическую эффективность
СКК обычно оценивают величиной свободного расстояния d f , которую можно
определить при известных параметрах внешнего кода (скорость кода R,
порождающие многочлены[26]). Однако более простым путем является оценка
верхней границы (ВГ) свободного расстояния D f , которую нетрудно установить
моделированием СКК методом «тест-пакета», описанным в [26, разд.6.2]).
Метод
«тест-пакета»
основан
на
моделировании
выходных
последовательностей кодера СК при воздействии на его вход специальным
образом сформированного тест-пакета, который обеспечивает «порождение»
кодером всех возможных путей из начального нулевого состояния (000..00») в
такое же нулевое состояние. Для гарантии перебора всех возможных путей
центральная часть тест-пакета должна содержать все возможные комбинации
входных
символов.
При
разработке
метода
оценки
ВГ
существенно
использовалось следующее известное положение теории случайных чисел. В
наборе случайных величин (СВ) с любым законом распределения вероятностей
среднее значение (математическое ожидание) всегда больше (либо равно)
наименьшему значению случайных величин из этого набора. При прохождении
случайных тест-пакетов через кодер на выходе кодера образуются отклики
разных величин (в некоторой метрике). Наименьшая величина этих откликов и
есть свободное расстояние кода в этой же метрике. Иными словами,
математическое
свободного
ожидание
расстояния
этих
откликов
исследуемого
СК.
является
верхней
Испытания
оценкой
проводились
в
следующем порядке. Предварительно выбирается структура исследуемого СК с
параметрами: скорость кода R, длина кодирующего регистра К. Испытания
кодера проводятся циклически. В программе предусмотрена установка
количества циклов испытаний N. В начале каждого цикла испытаний в
125
структуру кодера с заранее установленными параметрами программно вводятся
случайно выбранные коэффициенты порождающих многочленов G. Если за
каждый цикл испытаний (т. е. за каждое прохождение тест-пакета через кодер)
на выходе анализатора веса пути фиксируется вес wn, то средний вес случайных
путей определяется усреднением на всем множестве циклов объема N. Выше
отмечалось ,что такой средний вес (среднее расстояние для инвариантных
кодов) может служить в качестве верхней границы свободного расстояния
DВГ
1 N
wn .
N n1
(6.84)
В табл.6.3 приведены результаты оценки по изложенной методике верхней
границы свободного расстояния в метрике Хэмминга DH(ВГ) сигнально-кодовой
конструкции с сигналами ДФМ-2 и активным фильтром, реализующим
оптимальную некогерентную демодуляцию в соответствии с алгоритмом (6.69).
Видно, что с увеличением длины кодирующего регистра ДКР верхняя граница
возрастает. Это является основанием для последующего переборного поиска
внешних кодов. Эффективность применения внешних кодов, достигающих
верхней
границы
можно
определить
величиной
асимптотического
энергетического выигрыша[26]
АЭВК= 10 lg RDH ( ВГ ) , дБ
(6.85)
Таблица 6.3
Верхние границы свободного расстояния СКК ДФМ-СК
1
2
(Скорость кода R )
ДКР К
ВГ СР
DH(ВГ)
АЭВК, дБ
3
5
3,98
6
9
6,53
9
15
8,85
При передаче OFDM сигналов по каналам с частотно-селективными
замираниями сигналы отдельных поднесущих также подвергаются действию
замираний. Однако в случае узкополосных поднесущих эти замирания
126
сказываются как т.н. плоские (flat) замирания. В разделе2.3 приведен обзор
опубликованных сведений о плоских медленных замираниях в узкополосных
каналах фиксированной беспроводной связи. Статистические характеристики
замираний описываются в виде модели, учитывающей наличие в точке приема
регулярной составляющей с амплитудой А и случайной составляющей с
дисперсией σ2. Плотность вероятности амплитуды результирующего сигнала r
рекомендовано описывать райсовской функцией плотности вероятности:
p (r )
r
exp[
2
( r 2 A2 )
rA
]I 0 ( 2 ) для r >0, A>0,
2
2
для других r, A.
p( r ) 0
Отношение мощностей регулярной и случайной составляющих принято
описывать коэффициентом K=A2/2σ2. Рекомендуются значения коэфициента
K=(0…16) в зависимости от высот подвеса антенн, погодных условий (сезона),
местности, и т.п. Фаза принимаемого сигнала изменяется медленно и
подчиняется закону равномерного распределения. В литературе [51,52,53]
упоминаются следующие методы передачи и приема OFDM сигналов в
условиях
замираний:
помехоустойчивое
кодирование
в
сочетании
с
перемежением, адаптивные методы (изменение скорости передачи и мощности
сигналов поднесущих при сильных замираниях). Однако реализация этих
методов достаточно сложна. Вместе с тем, возможность демодуляции ДФМ
сигналов
активным
фильтром
с
гибким
решением
(6.77)
открывает
возможность простой реализации метода подавления замираний при приеме
поднесущих OFDM сигнала в структуре MIMO канала. Основная идея
технологии MIMO иллюстрируется на рис.6.3. Передающая часть сиcтемы
содержит M передатчиков (T1…TM) с передающими антеннами, тогда как
приемная часть содержит N приемников и приемных антенн (R1…RN).
Считается, что замирания порождаются рассеивающей средой распространения
радиосигнала H. На рисунке стрелками показано, что сигнал любого из
передатчиков Ti может достигать входа любого из приемников (R1..RN),
претерпевая замирания. Обычно такие структуры обозначают как (MxN). В
127
теории методов передачи информации по MIMO каналам используется
параметр «объем разнесения»(diversity volume), равный количеству возможных
путей прохождения сигналов между входами и, сответственно, выходами
MIMO канала. Для структуры на рис.6.3 объем разнесения равен произведению
VD=MN. При использовании на передающей стороне в системе на рис.6.3
многочастотных OFDM сигналов с L поднесущими будет реализовано
«пространственно/частотное разнесение», в котором этот объем возрастет до
VD(макс)=MNL. Нетрудно заметить, что в состав структуры (MxN) на рис.6.3
вложено M структур вида (1xN) с одним передатчиком и N приемниками
(рис.6.20). Возможности подавления замираний покажем на примере этой
структуры (1xN). В общем случае при использовании OFDM-ДФМ сигналов
каждый из N приемников структуры (MxN) должен содержать блок
демодуляторов { АФl }ll 1L , состоящий из набора активных фильтров АФl с
опорными частотами, совпадающими с частотами поднесущих передаваемого
OFDM-ДФМ сигнала l c l . Рассмотрим передачу сигнала поднесущей с
частотой l c l с выхода любого из передатчиков Тi(i=1…M). При
отсутствии замираний выходы активных фильтров АФl с одинаковыми
опорными частотам l c l , которые входят в состав набора приемников
{ R1… RN}, совпадают. При действии замираний эти выходы АФ с гибким
решением (алгоритм(17)) будут изменяться случайным образом. Возможность
подавления
замираний
поднесущих
OFDM-ДФМ
сигнала
проверена
моделированием. На рис.6.21 показана типичная временная диаграмма выходов
активных фильтров АФl с опорными частотами l c l , входящих в состав
Блок оптимального
объединения выходов АФ
H
Передатчик,
модулятор
OFDM-ДФМ-2
N антенн, приемников,
демлдуляторов-АФl (l=1…L)
набора приемников{R1…RN}.
128
Видно,
что
выход
демодулятора
с
гибким
решением
~
(6.67) VГР V0 V содержит регулярную составляющую V0 , обусловленную
~
иформационным двоичным сигналом и флуктуационную часть V , вызванную
замираниями. Таким образом, на приемной стороне в структуре системы (1хN)
имеются
N
выходов
~
V ( i ) ГР V ( i ) 0 V ( i ) (i 1...N ) ,
демолуляторов-активных
содержащих
регулярную
фильтров
составляющую
АФl
V (i ) 0
и
~
обусловленную замираниями случайную составляющую V (i ) . Фактически, при
таком рассмотрении имеет место пространственное разнесение сигналов
поднесущих, т.к. на рис.6.20 каждая поднесущая OFDM-ДФМ сигнала
проходит через среду H на приемную сторону разными путями. Возникает
задача оптимального объединения замирающих сигналов поднесущих с
выходов активных фильтров. Моделированием проверена эффективность
метода линейного сложения, как наиболее простого в реализации метода
объединения замирающих сигналов. В блоке оптимального объединения
выходов АФ (рис.6.20) производилось линейное сложение
N
N
N
~
VСУМ V ( i ) ГР V ( i ) 0 V ( i ) .
i 1
i 1
i 1
(6.86)
129
Рисунок 6.21– Временная диаграмма выхода активного фильтра при
передаче сигнала поднесущей с модуляцией ДФМ-2 и релевскими
замираниями в канале с коэффициентом К=3
В результате регулярные составляющие V0 , обусловленные иформационным
N
двоичным сигналом накапливаются V (i ) 0 NV0 , а суммирование cлучайных
i 1
~
компонентов V приводит к их усреднению. При накоплении результатов с
выходов АФ в сумматоре накапливаются также собственные шумы N
приемников. Из теории обработки методом накопления повторяющихся
регулярных сигналов, принимаемых на фоне аддитивной флуктуационной
помехи, известно, что в результате амплитуда сигнала возрастает в N раз (N–
число повторений) и, соответственно, мощность накопленного сигнала
возрастает в N2 раз, а шумы накапливаются по дисперсии (дисперсия
накопленного шума возрастает только в N раз), что и определяет выигрыш
метода накопления по величине отношения мощностей сигнал/шум, равный
N.На
рис.6.22
соответственно
приведены
с
результаты
формулой
(6.74)
моделирования.
результат
накопления
Видно,
что
регулярных
составляющих V0 увеличивается пропорционально росту N. В то же время
флуктуации
незначительны.
результата
Таким
накопления,
образом
обусловленные
эффективность
замираниями,
описанного
метода
130
подавления замираний возрастает с увеличением числа обрабатываемых
поднесущих N.
Рисунок6.22–Зависимость результата накопления выходов активных
ЗАКЛЮЧЕНИЕ
фильтров от количества объединяемых
выходов АФ
Аддитивные фазовые помехи, вносимые каналом с медленными замираниями,
эффективно подавляются при демодуляции сигналов дифференциальной
фазовой модуляции ДФМ. Это является основанием для использования метода
ДФМ при формировании сигналов поднесущих многочастотных сигналов
OFDM.
7.ЭФФЕКТИВНЫЕ КОДЫ И СИГНАЛЬНО-КОДОВЫЕ КОНСТРУКЦИИ
ДЛЯ СИСТЕМ БЕСПРОВОДНОГО ДОСТУПА
В предыдущих разделах показаны потенциальные возможности улучшения
дистанционных свойств и, соответственно, повышения помехоустойчивости
СКК с внутренними сигналами дифференциальной ФМ за счет пименения
внешнего сверточного кодирования. В настоящем разделе излагаются методика
и результаты поиска внешних СК для таких СКК.
7.1.Выбор характеристик внешних СК для решетчатых СКК с
внутренними сигналами дифференциальной ФМ
Современные условия передачи цифровой информации по реальным
каналам
связи
выдвигают
жесткие
требования
к
характеристикам
помехоустойчивости и эффективности методов передачи (модуляции и
кодирования), используемых в этих каналах. Обычно здесь используют
сигнально-кодовые конструкции (СКК), которые позволяют успешно сочетать
131
противоречивые свойства помехоустойчивых кодов и высокоскоростных
ансамблей многопозиционных сигналов [26]. В последние годы центр внимания
разработчиков новых методов переместился в область цифровой беспроводной
связи (системы мобильной связи, беспроводный доступ к Интернет и т.п.).
Выяснилось,
что
в
радиоканалах
с
замираниями
предпочтительней
использовать дифференциальную фазовую модуляцию (ДФМ)[2], которая
позволяет в процессе демодуляции эффективно подавлять фазовые сдвиги,
вносимые замираниями. В разработке СКК для каналов с замираниями
принимали
активное
участие
специалисты
по
помехоустойчивому
кодированию. Можно указать обширный список работ с результатами
разработки внешних сверточных кодов (СК) для СКК с внутренними сигналами
ДФМ: от фундаментальной обобщающей монографии шведских авторов [3] до
статей с конкретными результатами поиска внешних СК[4-6]. Недостатком
цитируемых работ является отсутствие системного похода к синтезу таких
СКК, когда кодер и модулятор рассматриваются раздельно (без взаимной
увязки). В тоже время, еще в монографии [26, разд.7.4] автор пособия указывал,
что переборный поиск внешнего СК для СКК с дифференциальной модуляцией
должен выполняться в рамках единой структуры кодека внешнего СК и
модулятора ЧМ-НФ, как конечных автоматов. Особенности структуры СКК с
внутренними сигналами дифференциальной ФМ рассмотрим на примере
передачи сигналов двоичной ФМ (основания алфавитов двоичных сигналов и
кода m=2) по каналу с фазовой помехой. Структуры дискретных моделей СК и
кодера дифференциальной ФМ-2 показаны на рис.7.1. Двоично/восьмеричное
представление порождающих многочленов сверточного кодера: G-1=(111),
G-2(=101); G-1=(7),G-2(=5). Длина кодирующего регистра кодера (ДКР) К
определяется количеством элементов задержки D в структуре регистра.
Каждый СК есть автомат с конечным числом состояний. В теории автоматов
состоянием принято считать набор значений переменных на входах элементов
задержки. Величина ДКР определяет количество состояний кодера S=mK.
Поведение каждого СК при подаче на вход кодируемых информационных
132
символов описывается диаграммой состояний и ее разверткой во времени
(решетчатой диаграммой, решеткой), каждая из которых содержит S состояний.
Величину S принято считать мерилом сложности реализации алгоритма
Витерби (АВ)[26]. С другой стороны, известно, что корректирующая
способность СК увеличивается с ростом ДКР (иными словами, с ростом «длины
кода»). По этой причине при реализации СК величину ДКР выбирают из
условий
компромисса
между
требуемым
минимальным
расстоянием
(свободным расстоянием СК df) и сложностью реализации АВ. Параметры СК
на рис.7.1: m=2, К=3, S=mK=8, df=3), скорость кода R=1/2. С выходов
сверточного кодера кодовые последовательности v(1) и v(2) через параллельнопоследовательный преобразователь (коммутатор К) подаются на вход
дифференциального кодера с передаточной функцией KДК(D) =
1
. Свойства
1 D
устойчивости к действию помех позволяет именовать такие СКК робастными
сигнально-кодовыми конструкциями (robust–устойчивый, в данном случае к
фазовым помехам). При последовательном включении сверточный кодер и
дифференциальный кодер образуют единый конечный автомат (сверточный
кодер СКК, см. рис.7.1), который содержит включенные последовательно
элементы задержки помехоустойчивого и дифференциального кодеров. Выход
этого кодера подан на вход модулятора ФМ сигналов. Видно, что подключение
дифференциального кодера удлиняет кодирующий регистр исходного
кодера внешнего СК, причем, в векторе состояний кодера
СКК S={s c(1), s c(2),… sc(K),.. s } помимо кодовых состояний sc(i) появляется
новое состояние s , которое уместно называть фазовым состоянием,
поскольку именно символ этого состояния, будучи поданым на вход
модулятора ФМ сигналов, определяет текущую фазу передаваемого сигнала.
Таким образом, длина кодирующего регистра кодера СКК возрастает до
величины
ДКР(СКК)=К+1.
алгоритма декодирования.
(7.1)
133
Сверточный кодер СКК
(1)
v
K
D
D
S(t)
Модулятор ФМ
D
D
v(
S={sc(1), sc(2),
2)
sc(К),…,s } – вектор состояний кодера СКК
Рисунок 7.1 – Структура СКК с единым сверточным кодером и модулятором ФМ
Количество вариантов состояний кодера СКК с таким вектором S
определяется выражением
S=m(K+1)
(7.2)
Роль увеличения ДКР может быть установлена на основе сопоставления
величины энергетического выигрыша при применении СК (ЭВК): «коротких»
СК с ДКР=К и «удлиненных» СК с ДКР=(К+1) и величины усложнения
алгоритма декодирования. По данным табл. Б.2.3 монографии [26] для СК со
скоростью R=1/2 средний прирост ЭВК за счет увеличения ДКР на единицу
составляет 0,75дБ. В тоже время, при реализации декодеров Витерби площадь
кристалла интегральной микросхемы (чипа) пропорциональна количеству
состояний кодовой решетки S. Т.е., увеличение «длины» СК на единицу
приносит, с одной стороны, выигрыш в ЭВК, но, с другой стороны,
приводит к повышению сложности реализации и, соответственно,
стоимости декодеров СК. По этой причине при выборе СК для применения в
реальных системах ограничиваются использованием достаточно коротких
кодов.
134
Для
подтверждения
изложенных
выше
положений
был
предпринят
переборный поиск внешних двоичных СК для робастных СКК. На базе метода
«тест-пакета» [26,разд.6.2], разработаны методика и компьютерная программа
исчерпывающего переборного поиска СК по критерию максимума свободного
расстояния. Результаты поиска приведены в табл.7.1.
Таблица 7.1
Номер
СКК
Результаты поиска робастных СКК
Свойства ДКР
Порождающие Свободное ЭВК,
СКК
К
многочлены
расстояние дБ
{G-1/G-2}
df
1
2
3
4
5
робастн.
--робастн.
--робастн.
3
3
6
6
9
{(40)/(30)}
{(23)/(35)}
{(42)/(44)}
{(247)/(371)}
{132)/(422)}
7
7
12
11
15
Сложность
решетки
СКК
S=2(К+1)
16
16
128
128
512
5,5
5,5
7,8
6,99
8,7
Все СКК перенумерованы. Новые робастные СКК отмечены нечетными
номерами. Для сравнения в этой же таблице даны сведения об СКК,
построенных
«традиционными
методами»
с
использованием
внешних
стандартных СК (четные номера), но не обладающих свойством робастности
к фазовым помехам. Как видим, полезное свойство устойчивости СКК к
фазовым
помехам
«окупается»
удлинением
кодирующего
регистра
и,
соответственно, повышением сложности S кодовой решетки. В порядке
«компенсации» этого эффекта необходимо отметить, что такое «удлинение»
кода СКК приводит к росту ЭВК(для достаточно длинных кодов ( К 6 )) в
среднем на величину порядка 1 дБ .
7.2.Двоичные сверточные коды для каналов с сигналами
дифференциальной ФМ
Обычно внешние коды для СКК отыскиваются путем исчерпывающего
перебора порождающих многочленов СК по критерию максимума
135
свободного расстояния всей СКК. Как правило, номенклатура таких кодов
ограничена типичными значениями скорости кода (R=1/2) и малыми длинами
кодирующего регистра(K≈6). Значительная часть интересующих теорию и
практику
сверточных
кодов
отыскивается
путем
прямого
перебора
порождающих многочленов с учетом ряда ограничений. Одним из ограничений
является принадлежность кода к классу т.н. катастрофических кодов,
которые в процессе перебора отбрасываются. В разработанных ниже
программах поиска и верификации предусмотрена проверка найденных кодов
по свойству катастрофичности.
Исследуемая СКК содержит последовательное соединение структурных
элементов, представленных в верхней части схемы на рис.7.2:
–Внешний сверточный кодер СК со скоростью R, вносящий избыточность в
последовательность предаваемых символов;
–Модулятор двоичной дифференциальной фазовой модуляции (Мод. ДФМ-2), в
котором каждое приращение фазы сигнала пропорционально передаваемым
кодовым символам;
–Демодулятор дифференциальной фазовой модуляции (Демод. ДФМ-2), в
котором происходит выделение оценок переданных кодовых символов путем
вычисления разности фаз сигналов, принятых в два соседних момента времени;
–Внешний сверточный декодер СК, в качестве которого обычно используют
декодер Витерби.
Обычно для переборного поиска СК используют метод «тест-пакета». В
соответствии с рекомендациями [26], метод «тест-пакета» пригоден для
исследования т.н. инвариантных СКК.
Используемые
в описываемой конструкции процедуры
дифференциального
кодирования
относятся
к
классу
сверточного
и
линейных
и
последовательное применение этих линейных процедур также обладает
свойством линейности. В работе[26, разд.5.4] доказано, что любая линейная
СКК обладает свойством инвариантности.
136
Структура СКК (CК-ДФМ-2)
Ввод значения
верхней границы dвг
Обнаружитель опимального
кода,
проверка условия (2)
Декодер
СК
СК
Анализатор веса пути
wn
Демод.
ДФМ-2
Индикация
многочленов кода,
проверка по свойству
катастрофичности
Мод.
ДФМ-2
Генератор порождающих
многочленов, установка
правила перфорации
Генератор тест-пакета
Кодер
СК
Код обнаружен,
остановка поиска
Датчик циклов измерений, установка N
Рисунок 7.2–Структуры сигнально-кодовой конструкции СК-ДФМ
и схемы поиска кодов
Это дает возможность применить метод «тест пакета»для решения задачи
поиска внешних СК. Частотная эффективность применения сверточных кодов
(СК) в телекоммуникационных системах зависит от скорости кода. К примеру,
при скорости R=1/2 необходимо двухкратное расширение полосы частот канала
для передачи как информационных так и дополнительных символов. В то же
время, попытки повышения частотной эффективности за счет увеличения
скорости кода приводят к ухудшению его дистанционных свойств, т.е. к
снижению помехоустойчивости декодирования СК. Поэтому при выборе
параметров кода отыскивают разумный компромисс, в результате чего во
многих системах с кодированием широко используют СК со скоростями 2/3 и
3/4. В то же время, реализация декодеров Витерби на скорости кода 1/2
137
оказывается наиболее простой. Именно поэтому многие производители
телекоммуникационного оборудования используют специализированные БИС
кодеков СК со скоростью 1/2, выпускаемые западными фирмами. В этих
условиях представляется актуальной задача разработки метода повышения
скорости СК с использованием удобных для реализации «базовых» кодов со
скоростями 1/2, а также задача поиска новых высокоскоростных СК по
критерию максимума дистанционных свойств. Для повышения скорости СК
используем
метод «перфорации» (puncturing). Перфорация состоит в
периодическом удалении некоторых символов в кодовых последовательностях
на выходе кодера и замене удаленных символов произвольным символом Х,
который по каналу не передается. Это позволяет повысить скорость кода за
счет ухудшения его дистанционных свойств (т. е. произвести обмен повышения
скорости
на
уменьшение
свободного
расстояния).
Структура
кодека
Перфоратор
v(1)
u(1)
D
D
D
Деперфораторр
перфорированного кода (ПСК) показана на рис.7.3.
Декодер
Витерби
v(2)
Формирователь циклов перфорации
и сигналов синхронизации
а)Кодер ПСК
Обнаружитель сигнала
синхронизации и
формирователь циклов
деперфорации
б)Декодер ПСК
Рисунок 7.3– Структура кодека перфорированного СК
Процедура «перфорации» поясняется следующим алгоритмом. Перфорации
обычно подвергаются «базовые» коды со скоростью R=1/2 (количество входов
кодера k=1 и число выходов n=2). Алгоритм Витерби для декодирования таких
138
кодов достаточно легко реализуется. Декодер Витерби дополняется блоком
синхронизации,
обеспечивающим
обнаружение
и
вставку
символа
Х.
Присутствие этого символа в кодовых последовательностях не меняет их
взаимные дистанционные свойства, поскольку символ перфорации расположен
в сравниваемых кодовых последовательностях в одном и том же месте. В
момент проступления на вход кодера базового кода каждого информационного
символа на выходах кодера со скоростью R=1/2 формируются кодовые символы
G1 и G2. Перенумеруем информационные символы на входе кодера и
определим правила работы перфоратора в виде таб.7.2 и таб.7.3. Наименование
правила перфорации определяется длиной цикла перфорации m. Как видно из
таб.1 при m=2 (правило m-2), последовательность номеров информационных
символов разбивается на пары. Причем, информационным символам с
нечетными номерами (расположенным в начале каждого цикла) соответствует
пара символов (G1, G2) на выходах кодера. Далее, информационные символы с
четными номерами порождают пару (G1, Х), в которой символ G2 заменен
символом Х. Подобное правило применимо при m=3 (правило m-3, см. таб. 2).
Видно, что в каждом из этих примеров m символам на входе кодера
соответствует (2m+1) кодовых символов на выходе кодера, что и определяет
скорость перфорированного кода
Таблица 7.2
Перфорация по правилу m-2
Номер инф. символа
Кодовые символы
Циклы перфорации
1
G1 G2
2
G1 X
Цикл перфорации
3
G1 G2
4
G1 X
5
G1 G2
6
G1 X
7
G1 G2
139
Таблица 7.3
Перфорация по правилу m-3
Номер инф. символа
Кодовые символы
Циклы перфорации
1
G1 G2
2
G1 G2
3
G1 X
4
G1 G2
5
G1 G2
6
G1 X
7
G1 G2
Цикл перфорации
Rперф=m/(2m–1).
(7.3)
Выбирая длину цикла перфорации, можно получить различные значения
скоростей кодов: при m=2, R перф=2/3 и т. д. Простой подсчет показывает, что
практически важную скорость Rперф=3/4 можно получить последовательным
применением процедур m-2 и m-3.
Нетрудно заметить, что расположение во времени символов перфорации Х
определяется моментами появления символов 0 в последовательности номеров
информационных символов, взятых по модулю m (что и определяет
наименование правил перфорации m-2 и m-3). В декодере ПСК предусмотрен
обнаружитель сигнала синхронизации и формирователь циклов деперфорации,
производящий вставку символов перфорации Х (обычно Х=0).
Изучению свойств катастрофичности сверточных кодов посвящен ряд
работ. В пособии [26, разд.10.3] обсуждается вопрос о появлении на выходе
сверточного кодера последовательности символов конечного веса при подаче
на вход кодера последовательности бесконечного веса. Соответственно, при
использовании таких кодов ошибки в каналах конечного веса приводят в
ошибкам декодирования бесконечного веса. В процессе кодирования кодер под
воздействием символов входной последовательности u(D) последовательно
изменяет состояния на диаграмме состояний. При этом в ряде случаев кодер
совершает циклы, последовательно обходя одни и те же наборы состояний. При
140
определенных порождающих многочленах на выходах кодера в пределах цикла
могут располагаться только нулевые символы. Цикл нулевого веса (ЦНВ) – это
последовательность состояний вместе с соответствующей последовательностью
символов ветвей, образующая замкнутый контур на диаграмме состояний
кодера СК, причем, все символы ветвей – нулевые. Наличие ЦНВ на диаграмме
состояний кодера, очевидно, ухудшает весовую структуру СК, поскольку
нулевые символы снижают расстояние соответствующих путей от полностью
нулевого
пути.
Коды,
обладающие
таким
свойством,
названы
катастрофическими, поскольку при их декодировании конечное число ошибок в
канале вызывает бесконечное число ошибок декодирования. В пособии [5]
сформулированы
аналитические
признаки
катастрофических
кодов.
Отмечается, что двоичный код обладает свойством катастрофичности, если
двоичное представление каждого порождающего многочлена содержит четное
число единиц. Оказалось, что используемый ниже для переборного поиска
метод «тест-пакета» наилучшим образом приспособлен для обнаружения
циклов нулевого веса и, соответственно, для идентификации найденного кода
про
критерию
катастрофичности.
Метод
«тест-пакета»
основан
на
моделировании выходных последовательностей кодера при воздействии на его
вход
специальным
образом
сформированного
тест-пакета,
который
обеспечивает «порождение» кодером всех возможных путей из начального
нулевого состояния (000..00») в такое же нулевое состояние [26]. Для гарантии
перебора всех возможных путей центральная часть тест-пакета должна
содержать все возможные комбинации входных символов. С использованием
возможностей
пакета
объектно-ориентированного
графического
программирования фирмы Hewlett Packard HPVEE разработана программа для
переборного поиска порождающих многочленов внешних двоичных СК со
скоростями кода R=(1/2, 2/3, 3/4) для сигнально-кодовой конструкции СКДФМ, предназначенной для использования в каналах с замираниями и
технологией многоантенной радиосвязи MIMO. Критерий поиска–максимум
свободного расстояния(СР) СКК в метрике Хэмминга df. Предварительно
141
экспериментально определяется верхняя граница свободного расстояния dвг.
Далее программа выполняет исчерпывающий перебор возможных варантов
порождающих многочленов и отыскивает код, свободное расстояние которого
приближается снизу к верхней границе (df≤dвг). Такой подход позволяет
находить
«наилучшие»
коды.
После
отыскания
наилучшего
кода
предусмотрена возможность последующей проверки величины свободного
расстояния найденного СК. Как известно, дистационные свойства СК зависят
от величины т.н. «памяти» кода, т. е. от длины кодирующего регистра кодера
(ДКР) К. С уведичением ДКР повышается помехоустойчивость декодирования,
но и возрастает сложность реализации декодера Витерби. В практически
используемых кодеках обычно выбирают К=6. В разработанной программе
предусмотрена возможность поиска СК при различных величинах К=(3…9),
что охватывает все возможные варианты длин: от коротких кодов (К=3) до
длинных кодов (К=9).
При разработке методики поиска существенно использовалось следующее
известное положение теории случайных чисел: В наборе случайных величин
(СВ) с любым законом распределения вероятностей среднее значение
(математическое ожидание) всегда больше (либо равно) наименьшему
значению СВ из этого набора. Иными словами, математическое ожидание
является верхней оценкой наименьшего значения СВ. Такой подход позволяет
решать задачу поиска оптимальных кодов, дистанционные характеристики
которых близки к верхним границам расстояний при заданных длине
кодирующего регистра (т.е. сложности алгоритма декодирования) и скорости
кода. К недостаткам методик поиска из работы [26] следует отнести отсутствие
процедуры проверки (верификации) дистанционных свойств найденного кода.
Такие процедуры проверки не предусмотрены в большинстве публикаций по
методам поиска. Кроме того, известные таблицы СК не содержат сведений об
отсутствии катастрофичности найденных кодов. Методика переборного поиска
оптимальных кодов состоит в следующем:
142
1.Отыскиваются сверточные коды, свободное расстояние которых близко к
верхней границе
свободного расстояния (но не превышает ее).
2.Для экспериментального определения расстояния кода используется«метод
тест-пакета».
3.Предварительно выбирается структура исследуемого СК с параметрами:
скорость кода R, длина кодирующего регистра К.
4.Испытания кодера проводятся циклически (см.рис.7.2). В программе
предусмотрена установка количества циклов испытаний N.
5.Экспериментально определяется верхняя граница свободного расстояния
кодера с выбранной структурой. С этой целью в начале каждого цикла
испытаний в структуру кодера с заранее установленными параметрами
программно вводятся случайно выбранные коэффициенты порождающих
многочленов G. При этом производится текущая индикация коэффициентов
порождающих многочленов.
6.Если за каждый цикл испытаний (т. е. за каждое прохождение тест-пакета
через кодер) на выходе анализатора веса пути фиксируется вес wn, то
средний вес случайных путей определяется усреднением на всем множестве
циклов объема N. Выше отмечалось ,что такой средний вес (среднее
расстояние для инвариантных кодов) может служить в качестве верхней
d ВГ
границы свободного расстояния
1 N
wn .
N n 1
(7.4)
7.Измерение значения верхней границы проводится при достаточно большом
числе циклов N, чтобы обеспечить уверенное усреднение по формуле (7.4)
и, одновременно, при приемлемых затратах времени на эксперимент
(например, N=(25…100)).
8.На выходе интегратора весов путей устанавливается пороговая схема,
фиксирующая попадание результата измерений веса пути wn в интервал
шириной
Δ,
расположенный
экспериментальной
выполнения условия
верхней
снизу
границы
по
отношению
dвг, т.е
к
уровню
проводится
проверка
143
(dвг– Δ)<wn<dвг .
(7.5)
9.Далее число циклов N устанавливается неограниченным и запускается
процесс переборного поиска кодов одного за другим с проверкой
выполнения условия обнаружения оптимального кода (2).
10.При выполнении этого условия процесс перебора прекращается, а значения
порождающих многочленов выводятся на индикатор и заносятся в
протокол испытаний.
11.После обнаружения оптимального кода найденные значения порождающих
многочленов вводятся в структуру кодера, и вновь запускается генератор
тест-пакетов и проверяется выполнение условия обнаружения (2).
Фактически, в этом случае происходит переборный поиск формы тестпакета, вызвавшей «реакцию» кодера оптимального кода с весом wn .
12.Если в процессе такого «обратного поиска» индицируется вес wn,
удовлетворяющий условию (7.5), то процесс поиска прекращается и
оптимальный код считается отысканным.
13.Найденный оптимальный код проверяется по свойству катастрофичности. С
этой целью повторяется процедура по п.11: для найденных значений
порождающих многочленов производится обнаружение циклов нулевого
веса по выполнению условия
wn=0.
Количество
циклов
испытаний
(7.6)
N
устанавливается
неограниченным
(насколько позволяет ресурс времени экспериментатора). При выполнении
условия обнаружения циклов нулевого веса найденный код считается
катастрофическим и в протокол результатов поиска не заносится.
14.Производится поиск порождающих многочленов перфорированных кодов.
Отысканный по п.12 оптимальный код(со скоростью 1/2 и свободным
расстоянием df) считается базовым и подлежит перфорации. Устанавливается
правило перфорации(m-2–для скорости1/2
и (m-2&m-3)–для скорости 3/4). Перфорация снижает величину свободного
расстояния перфорируемого базового кода df(пк). Отыскание порождающих
144
многочленов перфорированных кодов производится перебором аналогично п.9
и п.10, п.11 по выполнению условия остановки поиска
wn =df(пк).
(7.7)
Здесь df(пк)–предполагаемая величина свободного расстояния перфорированного
кода
15.Найденный перфорированный код по правилу из п.13 проверяется на
катастрофичность.
На рис.7.4 представлен вид рабочей панели программы поиска СК со
скоростями R=(1/2,2/3,3/4) и длиной кодирующего регистра К=9.
Пояснения к элементам панели следующие:
Flow Sample Dh– Индикация хода вычислений расстояний Хэмминга на экране
монитора;
Result- Dh – Индикация текущих значений расстояний Хэмминга;
Cycle Time–Задание длительности цикла измерений (сек);
Stop NС–Установка числа циклов;
Flow NC–Индикация хода процесса поиска;
Mean Dh–Результат вычисления среднего расстояния Хэмминга, используемый
в качестве верхней границы;
Stop Dh–Ввод значения расстояния для поиска кода;
145
Рисунок 7.4–Вид рабочей панели программы поиска
{FlowG1,G2}– Индикация порождающих многочленов кода со скоростью1/2
(fix1G-1, fix1G-2, fix1G-3)– Панели задания фиксированных многочленов для
обратного поиска;
{(G-rand)…(G-fix)}–Переключатели режима ввода многочленов в структуру
кодера в режимах «поиск» и «проверка».
Perf m-2, Perf m-3–Установка правил перфорации
В
приведенных
ниже
таблицах
(7.4…7.6)
даны
результаты
поиска.
Порождающие многочлены СК с целью компактности записи даны в
восьмеричной форме записи. К примеру, перевод в двоичное представление
имеет вид: (G1/G2)= (1,3,2)/(4,2,2)→(100.110.010)/(001.010.010). В таблицах
приведены
значения
асимптотического
энергетического
выигрыша
от
применения помехоустойчивого кодирования (АЭВК,дБ) по сравнению с
некодированной ФМ-2, которые определяются по формуле[26]
АЭВК=10lg(Rdf)(дБ).
Все найденные коды проверены по свойству катастрофичности.
(7.7)
146
Таблица 7.4
Результаты поиска СК для ДФМ-2
Длина кодового ограничения К=3
Скорость Порождающие
Метод
Верхняя
Своб.
АЭВК
кода
многочлены
перфорации граница
расстояние
(дБ)
R
G1/G2
СР
df
d f(m)
1/2
(4,0)/(3,0)
–
8
7
5,4
2/3
(4,0)/(3,0)
m-2
–
5
5,2
3/4
(4,0)/(3,0)
m-2&m-3
–
4
4,7
Таблица 7.5
Результаты поиска СК для ДФМ-2
Длина кодового ограничения К=6
Скорость
кода
R
1/2
2/3
3/4
Порождающие
Метод
многочлены
перфорации
G1/G2
(5,4)/(0,3)
–
(5,4)/(0,3)
m-2
(5,4)/(0,3)
m-2&m-3
Верхняя
граница СР
d f(m)
9
–
–
Своб.
расстояние
df
8
7
6
АЭВК
(дБ)
6,0
6,7
6,5
Таблица 7.6
Результаты поиска СК для ДФМ-2
Длина кодового ограничения К=9
Скорость Порождающие
Метод
Верхняя
Своб.
АЭВК
кода
многочлены
перфорации граница
расстояние
(дБ)
R
G1/G2
СР
df
d f(m)
1/2
(7,6,7)/(2,7,1)
–
15
14
8,4
2/3
(7,6,7)/(2,7,1)
m-2
–
13
9,3
3/4
(7,6,7)/(2,7,1)
m-2&m-3
–
12
9,5
Энергетический
выигрыш
от
применения
кодирования
показывает,
насколько можно понизить отношение сигнал шум на входе демодулятора при
введении помехоустойчивого кодирования. В соответствии с формулой (7.8)
величина АЭВК понижается с уменьшением скорости кода R (т.е. введением
избыточности) и повышается с увеличением свободного расстояния df.
147
Результаты вычислений АЭВК для найденных кодов приведены в табл.(7.4..7.6)
и на рис.7.5. Противоположный характер влияния этих параметров на величину
АЭВК приводит к неизменным величинам выигрыша (для кодов со скоростями
1/2,2/3
и
3/4
в
регистраК=(3…9).
широком
Для
диапазоне
практического
изменения
длин
использования
кодирующего
могут
быть
рекомендованы достаточно длинные коды (К=9) и скоростями 2/3, 3/4, которые
обеспечивают АЭВК порядка (8-9)дБ.
10
9
8
ЭВК (дБ)
7
6
Рисунок 7.5–Зависимости величины энергетического выигрыша кодирования от
длины кодирующего регистра кодера К для различных скоростей кода R=(1/2,2/3,3/4)
7.3.Внешние сверточные коды для сигнально-кодовых конструкций с
внутренними сигналами многопозиционной дифференциальной ФМ
Применение двоичной фазовой модуляции существенно снижает удельную
скорость передачи информации по каналу и, соответственно, эффективность
использования полосы частот канала. Как известно [26], повышение удельной
скорости возможно при использовании в канале многопозиционных сигналов (в
данном случае сигналов многопозиционной дифференциальной фазовой
148
модуляции ДФМ-М (М>2 – объем алфавита сигнального ансамбля). Для
эффективного согласования помехоустойчивых кодов c многопозиционными
сигналами в составе СКК внешние СК также должны быть недвоичными
(М–основание алфавита внешнего СК). В литературе подобного рода СКК с
недвоичными СК и сигналами ДФМ-М не рассматривались. Обычно внешние
коды для СКК отыскиваются путем исчерпывающего перебора порождающих
многочленов СК по критерию максимума свободного расстояния всей СКК.
Исследуемая СКК содержит последовательное соединение структурных
элементов, представленных в верхней части схемы на рис.7.6:
–Внешний сверточный кодер СК со скоростью R, вносящий избыточность в
последовательность предаваемых символов;
–Модулятор многопозиционой дифференциальной фазовой модуляции
(Мод.ДФМ-М), в котором каждое приращение фазы сигнала пропорционально
передаваемым кодовым символам;
–Демодулятор дифференциальной фазовой модуляции (Демод.ДФМ-М), в
котором происходит выделение оценок переданных кодовых символов путем
вычисления разности фаз сигналов, принятых в два соседних момента времени;
–Внешний сверточный декодер СК, в качестве которого обычно используют
декодер Витерби.
Для
переборного
поиска
СК
используем
метод
«тест-пакета».
В
соответствии с рекомендациями [26], метод «тест-пакета» пригоден для
исследования
т.н.
инвариантных
СКК.
Используемые
в
описываемой
конструкции процедуры сверточного и дифференциального кодирования
относятся к классу линейных и последовательное применение этих линейных
процедур также обладает свойством линейности. В монографии [26, разд.5.4]
доказано, что любая линейная СКК обладает свойством инвариантности. Это
дает возможность применить метод «тест пакета» для решения задачи поиска.
149
Структура СКК(CК-ДФМ-М)
Демод.
ДФМ-М
Ввод значения
верхней границы dвг
Обнаружитель опимального
кода,
проверка условия (2)
Декодер СК
Анализатор веса
пути wn
Индикация
многочленов кода
Мод.
ДФМ-М
Генератор порождающих
многочленов,установка
правила перфорации
Генератор тест-пакета
Кодер СК
Код обнаружен,
остановка поиска
Датчик циклов измерений, установка N
Рисунок 7.6–Структуры сигнально-кодовой конструкции СК-ДФМ
и схемы поиска кодов
С
использованием
возможностей
пакета
объектно-ориентированного
графического программирования фирмы Hewlett Packard HPVEE разработана
программа для переборного поиска порождающих многочленов внешних
недвоичных СК со скоростями кода R=1/2,2/3 и 3/4 для сигнально-кодовой
конструкции СК-ДФМ-М, предназначенной для использования в каналах
многоантенной радиосвязи MIMO. Критерий поиска–максимум свободного
расстояния СКК в метрике Евклида Df. Предварительно экспериментально
определяется верхняя граница свободного расстояния Dвг. Далее программа
выполняет исчерпывающий перебор возможных варантов порождающих
многочленов
и
обнаруживает
код,
свободное
расстояние
которого
приближается снизу к верхней границе (Df≤Dвг). Такой подход позволяет
150
находить «наилучшие» коды, названные оптимальными. Поскольку сложность
реализации алгоритма Витерби S возрастает экспоненциально с увеличением
длины кодирующего регистра кодера К (S=MK), отыскивались удобные для
реализации короткие коды (К=2 и К=3). Предполагается декодирование
сигнально-кодовой конструкции СК-ДФМ-М с применением алгоритма
Витерби, отыскивающего максимально правдоподобный путь на решетчатой
диаграмме СКК, отстоящий от принятого пути на минимальном расстоянии
Евклида [26]. Иными словами, в процессе поиска отыскиваются внешние СК,
обеспечивающие максимум свободного расстояния в метрике Евклида Df всей
сигнально-кодовой
конструкции
СК-ДФМ-М.
При
демодуляции
дифференциально модулированных ФМ-М сигналов в демодуляторе с гибким
решением вычисляется текущее значение евклидова расстояния между
предыдущим Si-1 и последующим Si векторами сигнала, которое в соответствии
с рис.5.12 из[26] определяется так
Di 2 E s sin[
M
( i i 1 )] .
(7.8)
Здесь, с учетом введения внешнего кодирования [26] со скоростью кода R
Es=REblog2M–энергия ФМ-М сигнала, выраженная через затраты энергии на
передачу одного бита Eb ( Es –длина вектора любого ФМ сигнала);
( i i1 ) –разность
(по модулю М) модулирующих кодовых символов,
выбираемых из кольца R(M).
Помехоустойчивость декодирования СК
алгортмом Витерби определяется величиной свободного расстояния, которое
определяется как минимальное значение взаимных евклидовых расстояний
между декодируемыми путями
2
D f min
D
i
i
2
=min REb log 2 M [ 2 sin(
i
M
( i i1 )]2 .
(7.9)
Здесь минимум определяется для тех номеров i переданных сигналов,
которые соответствуют участку расхождения декодируемых путей. Для оценки
влияния кодирования свободное расстояние СКК (7.10) обычно сравнивают с
151
минимальным
расстоянием
М-позиционной
некодированной
(R=1)
дифференциальной фазовой модуляции ДФМ-М
D0 2 Es sin(
M
) [26]. Поэтому далее используем нормированное свободное
расстояние СКК
2 D2 f
1
D f 2 min R 2 [ 2 sin( ( i i1 )]2 .
D 0
D 0 i
M
(7.10)
Переход к многопозиционным сигналам ДФМ-М повышает информационную
нагрузку на каждый передаваемый сигнал. Это отражается удельной
скоростью( количеством информации, переносимого сигналом [26])
γСКК= Rlog2M(бит/сигнал).
(7.11)
Нормированное расстояние(3) удобно представить в виде
D2 f
1
~ 2
D 2 f 2 min R 2 [2 sin( ( i i1 )]2 min[ R ] D f .
D 0
M
D
i
0
~
1
[ 2 sin( ( i i1 )]2 }
2
M
i D 0
Здесь D f 2 =min {
(7.12)
(7.13)
–квадрат нормированного расстояния, определяемого в процессе поиска, и
названного по этой причине квадратом расчетного свободного расстояния.
Первый сомножитель последней части ввражения (7.13) определяется долей
избыточности используемого кода, тогда как влияние дистанционных свойств
кода проявляется во втором сомножителе. Изменение помехоустойчивости при
введении
кодирования
определяется
величиной
асимптотического
энергетического выигрыша
АЭВК=10lg D 2 f (дБ).
(7.14)
АЭВК показывает, насколько может быть понижено отношение сигнал/шум
на входе демодулятора СКК по сравнению с некодированной ДФМ-M при
равной и достаточно малой вероятности ошибки декодирования. При
разработке методики поиска существенно использовалось следующее известное
положение теории случайных чисел. В наборе случайных величин (СВ) с
любым законом распределения вероятностей среднее значение (математическое
152
ожидание) всегда больше (либо равно) наименьшему значению СВ из этого
набора. Иными словами, математическое ожидание является верхней оценкой
наименьшего значения СВ.
Методика переборного поиска оптимальных кодов состоит в следующем:
1.Отыскиваются оптимальные сверточные коды, свободное расстояние
которых близко к верхней границе свободного расстояния (но не превышает
ее).
2.Для экспериментального определения расстояния кода используется«метод
тест-пакета».
3.Предварительно выбирается структура исследуемого СК с параметрами:
скорость кода R, длина кодирующего регистра К. Для повышения
скорости кода используется метод «перфорации» (выкалывания) кодовых
последовательностей, подробно описанный в монографии[26,Приложение
Б.2] (Использованы правила перфорации m-2 и m-3).
4.Испытания кодера проводятся циклически (см.рис.7.6). В программе
предусмотрена установка количества циклов испытаний N.
5.Экспериментально определяется верхняя граница свободного расстояния
кодера с выбранной структурой. С этой целью в начале каждого цикла
испытаний в структуру кодера с заранее установленными параметрами
программно вводятся случайно выбранные коэффициенты порождающих
многочленов G. При этом производится текущая индикация коэффициентов
порождающих многочленов.
6.Если за каждый цикл испытаний (т. е. за каждое прохождение тест-пакета
через кодер) на выходе анализатора веса пути фиксируется вес wn, то
средний вес случайных путей определяется усреднением на всем множестве
циклов объема N. Выше отмечалось ,что такой средний вес (среднее
расстояние для инвариантных кодов) может служить в качестве верхней
границы свободного расстояния
DВГ
1 N
wn .
N n1
(7.15)
153
7.Измерение значения верхней границы проводится при достаточно большом
числе циклов N, чтобы обеспечить уверенное усреднение по форм. (7.16) и,
одновременно, при приемлемых затратах времени на эксперимент (например,
N=(25…100)).
8.На выходе интегратора весов путей устанавливается пороговая схема,
фиксирующая попадание результата измерений веса пути wn в интервал
шириной
Δ,
расположенный
снизу
по
отношению
к
уровню
экспериментальной верхней границы Dвг, т.е проводится проверка
выполнения условия
(Dвг– Δ)<wn<Dвг .
(7.16)
9.Далее, число циклов N устанавливается неограниченным и запускается
процесс переборного поиска кодов одного за другим с проверкой
выполнения
условия
обнаружения
оптимального
кода
(7.17).
При
выполнении этого условия процесс перебора прекращается, а значения
порождающих многочленов выводятся на индикатор и заносятся в протокол
испытаний. В монографии[26,Разд.6.3] показано, что такой процесс
переборного поиска позволяет вдвое сократить средние затраты времени на
обнаружение оптимального кода (по сравнению с затратами времени на
перебор полного объема).
В приведенной ниже табл.7.7 даны результаты поиска. Порождающие
многочленыСК с целью компактности записи даны в восьмеричной форме
записи. В таблице приведены значения удельной скорости N и энергетического
выигрыша от применения помехоустойчивого кодирования (АЭВК,дБ).
154
Таблица7.7
Результаты поиска внешних кодов для СКК
(ДКР К=2)
Объем
Скорость Метод
Порожд.
ансамбля СК
перфорации многочлены
M
R
G1/G2
Верхняя Свободное Удельная АЭВК,
граница расстояние скорость дБ
~ 2
DВГ
СКК
Df
N
4
1/2
----
(3,2,0)/
(0,3,0)
9,5
8,0
1,0
7,5
8
8
16
1/2
2/3
1/2
--m-2
---
(6,2)/(6,1)
(6,2)/(6,1)
(12,10,0)/
(12,14,0)
11
9,414
10,0
8,0
1,5
2,0
2,0
8,3
9,13
7,5
16
3/4
m-2&m-3
(12,10,0)/
(12,14,0)
(ДКР К=3)
8,59
3,0
8,72
4
1/2
----
0,0,1)/
(10,2,0)
17,5
16,0
1,0
10,5
8
8
16
1/2
2/3
1/2
---m-2
(7,0,2)/(7,1,0) 18,0
(7,0,2)/(7,1,0)
(13,5,6)/
18,0
(11,8.5)
17,41
17,52
15,62
1,5
2,0
2,0
10,9
11,56
10,43
16
3/4
13,5,6)/
(11,8.5)
14,59
3,0
11,02
Данные
табл.7.7
позволяют
12
сформулировать
рекомендации
по
практическому применению найденных кодов. Введение избыточности при
кодировании снижает удельную скорость передачи информации N , но при этом
возрастает свободное расстояние СКК и повышается ЭВК. В таких условиях
актуальной
является
задача
отыскания
оптимальной
скорости
кода,
обеспечивающей максимум ЭВК. На рис.7.6 приведены построенные по
данным табл.7.7 зависимости ЭВК СКК от скоростей применяемого
сверточного кода R для различных длин кодирующего регистра СК К=2 и 3.
155
Видно, что максимум ЭВК достигается при скорости R=2/3 (ДКР К=3). В
соответствии с данными табл.7.7 этот максимум обеспечивает применение в
канале дифференциальной ФМ с объемом ансамбля М=8 и внешним
перфорированным
СК
со
скоростью
R=2/3
и
порождающими
многочленами{7,0,2)/(7,1,0) }.
Энергетический выигрыш (дБ)
14
12
10
8
6
K=2
K=3
4
2
0
R=1/2
R=2/3
R=3/4
Скорость кода R
Рисунок 7.6– Зависимости величины энергетического выигрыша ЭВК от скорости внешнего
сверточного кода для различных длин кодирующего регистра К=2 и 3
156
ЗАКЛЮЧЕНИЕ
1.В пособии изложены сведения о перспективных тенденциях развития
телекоммуникационных
сетей
–
о
сетях
нового
поколения
NGN.
Сформулированы требования к методам передачи информации в таких сетях
и, в первую очередь, к методам передачи сообщений по каналам
беспроводного доступа (радиоканалам).
2.На основе обобщения опубликованных данных изложены статистические
характеристики замираний в радиоканалах и дана классификация методов
разнесения, предназначенных для передачи информации по каналам с
замираниями.
3.Разработаны теоретические основы дифференциальных методов передачи
информации
для
таких
каналов
и
представлены
новые
методы
промехоустойчивого кодирования и новые сигнально-кодовые конструкции.
4.Изложенный в пособии теоретический материал может служить основой
для
решения
научных
задач
в
магистерских
исследовательских работах по этой тематике.
и
аспирантских
157
ПРИЛОЖЕНИЯ
А.Перечень тем исследовательских научных работ
магистрантов и аспирантов
Перечень составлен на базе материалов настоящего пособия. Наименование
каждой темы (М–для магистрантов, А–для аспирантов) сопроводждается
ссылками на рекомендуемые номера разделов пособия.
М.1.Разработка и тестирование компьютерной программы моделирования
канала с плоскими медленными замираниям по стандарту IEEE 802.16а
(разд.2.4).
М.2.Разработка и тестирование компьютерной программы моделирования
канала
с
допплеровским
смещением
частоты
несущей
по
стандарту
IEEE802.16a (разд.2.4).
М.3. Разработка и тестирование компьютерной программы моделирования
канала с селективными замираниями при передаче широкополосных сигналов
на базе ортогональных гармонических переносчиков OFDM (разд.5.2, 2.4).
М.4.Исследование влияния методов модуляции на пропускную способность
каналов MIMO (разд.5.1,6.4,6.5).
М.5.Исследование помехоустойчивости метода разнесенного приема
дифференциально модулированных ФМ сигналов(разд. 6.10).
М.6.Разработка структуры демодулятора дифференциально модулированных
многочастотных ФМ сигналов с использованием активных фильтров
(разд. 6.11).
М.7.Разработка
методики
экспериментального
и
исследования
программного
обеспечения
помехоустойчивости
приема
СКК
для
с
внутренними сигналами ДФМ-2 и внешними двоичными сверточными кодами
(разд.7.2).
М.8.Разработка
методики
экспериментального
и
исследования
программного
обеспечения
помехоустойчивости
приема
СКК
для
с
158
внутренними сигналами ДФМ-М и внешними недвоичными сверточными
кодами (разд.7.3).
А.1.Развитие теории дифференциальных методов передачи информации по
каналам с замираниями (разд.6).
А.2.Исследование
возможности
повышения
скорости
передачи
при
использовании дифференциальной амплитудно-фазовой модуляции (разд.6).
А.3.Повышение эффективности систем передачи информации по каналам с
замираниями
с
использованием
широкополосных
сигналов
ортогональных гармонических переносчиков (OFDM) (разд.5.2).
на
базе
159
Б.Композитные коды Баркера
В разделе 6.10 обсуждалась возможность применения кодов Баркера в
качестве синхронизирующих последовательностей при организации пакетной
передачи данных а системе разнесенного приема. Последовательности Баркера
(«коды Баркера») имеют хорошие автокорреляционные свойства и в силу этого
часто применяются в системах временной синхронизации. В 1953г. Р. Баркер
[59] опубликовал сведения об уникальных свойствах последовательностей
разнополярных символов (именуемых в русскоязычных публикациях кодами
Баркера). Коды Баркера обладают уникальной формой автокорреляционной
функции, что служит основанием для их применения в цифровых системах
цикловой (кадровой) синхронизации [13].
Анализ
показывает,
что
помехоустойчивость
системы
цикловой
синхронизации определяется не только уникальными автокорреляционными
свойствами кодов Баркера, но и возрастает с увеличением полной энергии
синхросигналов, т.е., фактически, с увеличением длины последовательности
Баркера. Поэтому для построения помехоустойчивых систем синхронизации
необходимо использовать более длинные последовательности (коды) Баркера.
В настоящее время известно ограниченное количество кодов Баркера весьма
короткой длины m<13. Подробные таблицы таких кодов можно найти в
монографии [13, табл.10.1]. Там же на стр.663 сообщаются не вполне точные
сведения о попытках Линдера поиска последовательностей длиной до m=40,
обладающих уникальными свойствами кодов Баркера. В работе[46] автором
пособия совместно с асп. М. Токарем был предложен конструктивный способ
построения длинных синхрослов (названных композитными кодами Баркера) с
хорошими автокорреляционными свойствами, пригодных для систем цикловой
синхронизации и избавляющий от необходимости переборного их поиска.
Основные свойста известных кодов Баркера, именуемых далее каноническими,
сводятся к следующему [59,13]. Рассмотрим последовательность конечной
длины
160
С(i) = ( с1, с2, с3,…сi….,сm),
в которой значения символов сi выбираются из алфавита {+1,–1},
а m есть длина последовательности.
Апериодическая функция автокорреляции (АКФ) такой последовательности
определяется так:
R(k )
(А.1)
1 m
с(i)с(i k ).
m i 0
Анализ показывает,что АКФ канонических кодов равна:
R(k)=m при k =0;
R(k)=0 при k >1,(m–k) – четное;
(А.2)
R(k)=+ – (1/m) при k >1,(m–k) – нечетное.
В табл.А.1 приведен фрагмент таблицы коротких кодов Баркера из книги
[13]. Полярность символов отмечена знаками «+» и «–».
Форма сигнала Баркера C7 при m=7 показана на рис.А.1.
Таблица А.1
Короткие коды Баркера
Длина кода
Обозначение
Последовательность
m
кода
1
C1
+
2
C2
–+
3
C3
++–
4
C4
+++–
5
C5
+++–+
7
C7
+–++–––
13
С13
++++–– +++–+
символов
161
Рисунок А.1– Временная диаграмма короткого сигнала Баркера С7.
Вертикальные линии показывают уровни и местоположение
элементарных сигналов сi, значения которых представлены в
нумерованных окнах.
Форма АКФ этого сигнала С7 ( m=7) показана на рис.А.2.
Рисунок А.2 – Функция автокорреляциии короткого сигнала Баркера
С7. Точками отмечены значения АКФ.
162
Наличие пика АКФ среди близких к нулю значений боковых лепестков и
определяет «уникальность» сигналов Баркера.
Выделение синхронизирующих сигналов Баркера из потока цифровых
данных
производится
с
применением
согласованных
фильтров
(СФ).
Импульсная реакция СФ, согласованного с сигналом Баркера C(t) есть с
точностью до постоянного множителя a зеркальное отображение формы
сигнала:
g(t)=aC( t0–t),
(А.3)
где t0 – момент отсчета выхода СФ.
Максимум отклика фильтра, согласованного с сигналом C(t), пропорцонален
полной энергии этого сигнала Ec, а отношение сигнал/шум, важное для
определения вероятности обнаружения синхросигнала будет:
Q=(Ec / N0).
(А.4)
Отсюда ясно, что для повышения помехоустойчивости обнаружения
синхросигнала его энергию и, соответственно, длину m необходимо повышать.
Композитные
коды
Баркера
позволяют
синтезировать
длинные
синхропоследовательности с хорошими автокорреляционными свойствами. Для
синтеза используется пара коротких последовательностей Баркера (например,
из табл.А.1). Выберем сначала произвольную последовательность Cm длины m,
которую
далее
будем
именовать
«элементарной»,
и
затем
выберем
произвольную последовательность CM длины M, которую далее будем
именовать «образующей».
Композитный код есть код Баркера, построенный по правилам формирования
образующей последовательности CM, в которой элементами являются
«элементарные» последовательности Cm .
Сказанное иллюстрируем примером, в котором в качестве элементарной
последовательности Cm выбрана последовательность Баркера С7 из табл.А.1, а
в качестве образующей выбрана последовательность Баркера С2 из табл.А.1,
знаки символов которой определяют знаковые множители элементарных
последовательностей Cm. Процесс формирования такого композитного кода
163
представлен в табл.А.2. В таблице показана свертка C2*C7 знаковых
последовательностей C2 и C7, а также итоговая последовательность
композитного кода C2/C7, в которой предусмотрены знаки (ø….ø) защитных
промежутков, исключающие взаимное перекрытие символов элементарных
последовательностей.
Таблица А.2
Формирование композитного кода C2/C7
Образующий,
Формирование композитного кода
элементарный и
итоговый композитный
коды
C2
–
+
C7
+–++–––
+–++–––
C2*C7
–+––+++
+–++–––
C2/C7
– + – – + + + øøøøøøøø + – + + – – –
В последующем, по аналогии с этим примером, композитные коды будут
обозначаться, как дробь СM/Cm.Таким образом,общая длина такой
композитной последовательности равна произведению
Mk=Mm.
(А.5)
В этой формуле не учтены знаки защитных промежутков, количество которых
можно свести к нулю точным формированием. На рис.А.3 представлена форма
композитного синхросигнала C2/C7, соответствующего табл.А.2.
164
Рисунок А.3 – Форма композитного синхросигнала C2/C7
Автокорреляционная функция сигнала C2/C7 имеет вид, показанный на
рис.А.4. Видно, что максимум АКФ увеличился за счет накопления
максимумов
АКФ
элементарного
сигнала
C7.
Причем,
значения
положительных боковых лепестков не превышают величины 1/m. В то же время
проявились отрицательные боковые выбросы, которые, как показывают
измерения, не снижают возможности обнаружения такого сигнала по
положительному выбросу АКФ.
Рисунок А.4 – Автокорреляционная функция композитного
синхросигнала C2/C7
165
В системах с временным разделением информация передается пакетами
(блоками), в структуру которых для синхронизации включают синхросигнал.
Общий вид структуры такого блока показан на рис.А.5.
Синхросигнал
Блок информ.
сигнала
Шум канала
На входе СФ:
(Синхросигнал+инф. сигнал)
Ошибки синхронизации:
Ложные обнаружения
синхросигнала
На входе СФ:
(Синхросигнал+ Шум канала)
Ошибки синхронизации:
Пропуски
синхросигнала
Рисунок А.5 – Временная диаграмма приема блока информационного
сигнала вместе с сигналом синхронизации
Отмеченные выше свойства композитных синхросигналов используют в
системах
блоковой
синхронизации
для
обнаружения
границ
блоков
информационных сигналов.
Пороговый обнаружитель синхросигнала состоит из фильтра, согласованного
с синхросигналом. Выход фильтра подается на пороговое устройство с
фиксированным порогом L. При подаче на вход СФ синхросигнала отклик на
его выходе определяется формой АКФ синхросигнала (А.2). Превышение
166
выбросомАКФ порога L регистрируется, как временная отметка, используемая
для синхронизации по времени.
Качество работы таких систем определяются следующими показателями:
1. Вероятностью ложного обнаружения Рло границы блока информационного
сигнала. Ложное обнаружение синхросигнала возникает всякий раз, когда
отрезок информационной последовательности содержимого блока на входе СФ
принимает форму синхросигнала.
2.Вероятностью
синхросигнала
пропуска
случайным
Pпр
за
счет
поступающим
из
канала.
границы
шумом,
блока
подавления
Пропуск
синхросигнала возникает всякий раз, когда случайный шум, поступающий из
канала, принимает форму, инверсную форме синхросигнала, и, соответственно,
снижает уровень отклика на выходе согласованного фильтра. При этом
синхросигнал не регистрируется.
Параметры Рло и Pпр зависят от порогового уровня L обнаружителя
синхросигнала,
свойств
синхросигнала,
информационного
сигнала
и
случайного шума. Эти параметры предстоит определить с целью сравнения
свойств канонических и композитных кодов Баркера. Результаты исследований,
выполненных с применением программ, разработанных в среде пакета
прикладных программ HP VEE, приведены далее. На входы фильтров,
согласованных
с
каноническим
(Сm)
и
композитным
(СM/Сm)
синхросигналами (соответственно) подавалась случайная последовательность
равновероятных
независимых
символов
{+1,–1},
имитирующая
поток
информационных символов содержания блока. Вид процесса на выходе
фильтра, согласованного с сигналом С7 показан на рис. А.6. Выбросы на
выходе фильтра С7 на рис. А.6 достигают уровня 7, что соответствует данным
рис.
А.2.
Выброс
уровня
7
появляется
всякий
раз,
когда
отрезок
информационной последовательности на входе СФ совпадает с формой сигнала
С7.
167
Рисунок А.6 – Процесс на выходе фильтра, согласованого с
сигналом С7.
Видно,что такие выбросы достаточно редки. Регистрировалось количество
превышений предварительно установленного порога L, отмеченное на
протяжении длительности теста N. Величина N выбиралась равной 105
символов, что гарантировало точность определения вероятности ложных
обнаружений. В этом случае вероятность ложных обнаружений определяется
отношением
Рло= Nло / N .
(А.6)
Результаты измерений приведены в табл.А.3. Выбор больших значений
порога L, превышающих максимум АКФ сигнала, недопустим, поскольку в
этом случае будет пропущен синхросигнал. По данным табл. А.3 можно
установить предельно низкие значения порога, гарантирующие приблизительно
равные вероятности ложных обнаружения каждого из синхросигналов.
Выбор больших значений порога L, превышающих максимум АКФ сигнала,
недопустим, поскольку в этом случае будет пропущен синхросигнал.
168
Таблица А.3
Количество ложных обнаружений синхросигнала Nло
Порог 1 2 3 4 5
6 7
8
9
10 11 12 13 14 15
- - - - 785 4 0
0
0
0
L
C7
C2/C7 - - -
-
-
0
0
0
0
0
2680 676 634 97 81 8
3
0
0
По данным табл.А.3 можно установить предельно низкие значения порога,
гарантирующие приблизительно равные вероятности ложных обнаружения
каждого из синхросигналов:
– Канонический сигнал С7: L=6, Рло=4.10-5;
– Композитный сигнал С2/С7: L=13, Рло=3.10-5.
Таблица А.4
Сравнительные данные обработки синхросигналов
согласованными фильтрами
Тип кода Баркера
C7 C2/C7 C2/C13 C3/C13 C4/C13 C5/C13 C7/C13
Длина кода Mm
7
14
26
39
42
65
91
Максимальный
7
14
26
39
42
65
91
7
14
24
27
28
36
37
уровень
выброса АКФмакс
Уровень выброса
отклика СФмакс
при действии на
входе случайной
последовательности
169
Использование длинных композитных кодов дает значительно лучшие
результаты по сравнению с короткими кодами. Это подтверждается данными
измерений, приведеными в табл.А.4.
С увеличением длины синхросигнала уровень выбросов на выходе
соответствующего СФ не достигает максимального значения выброса АКФ.
Это наглядно иллюстрируется осциллограммой представленной на рис. А.7.
Представлен длинный композитный синхросигнал С7/С13, для которого можно
установить порог уверенной регистрации L0=50 (L0<АКФмакс=91). Видно, что
выбросы процесса на выходе СФ никогла не достигают этого порога.
Аналогичные ситуации имеют место при обнаружении других исследованных
длинных композитных синхросигналов (С2/С13...С7/С13). Здесь всегда между
максимальным уровенем выброса АКФ макс и уровнем выброса отклика СФмакс
имеется определенный запас = АКФ макс – СФмакс, что позволяет устанавливать
порог уверенной регистрации синхросигнала в пределах этого интервала. При
выполнении
этого
условия
можно
считать,
что
вероятность
ложных
обнаружений синхросигнала близка к нулю, что и подтверждает уникальность
длинных композитных кодов.
Рисунок 7– К иллюстрации прцесса регистрации
композитного синхросигнала С7/С13
Для сравнения свойств помехоустойчивости канонического и композитного
синхросигналов необходимо совместное рассмотрение ошибок регистрации
синхросигнала,
обусловленных
как
ложными
обнаружениями,
так
и
пропусками синхросигнала. Будем считать, что каждая из этих ошибок ведет к
170
ошибке правильного приема блока (т.е. ошибки ложных обнаружений и
пропусков
синхросигнала
равноценны).
В
таком
случае
критерием
оптимизации порога регистрации является минимум суммарной вероятности
ошибки регистрации
Ро= Рло+Рпс .
(А.7)
Ранее установлено, что при установке порога регистрации синхросигнала в
пределах этого интервала = (АКФ
обнаружений
синхросигнала
макс
близка к
– СФмакс) вероятность ложных
нулю(Рло=0). В этих
условиях
помехоустойчивость приема синхросигналов в соответствии с формулой (А.7)
определяется только вероятностью пропуска синхросигнала (Ро= Рпс), которая
может быть определена следующим образом. Для анализа процесса пропуска
синхросигнал С7 в сумме с аддитивным шумом подавался на согласованный с
ним фильтр. Особенности подавления синхросигнала шумом иллюстрируют
временные диаграммы на рис.А.7 (синхросигнал без шума) и рис.А.8
(синхросигнал в сумме со случайным шумом). При подаче шума появляется
«шумовая дорожка», а также модуляция уровня максимумов АКФ случайным
шумом. При этом каждое понижение уровня выхода СФ наже порога сравнения
L приводит к пропуску синхросигнала. Вероятность пропуска синхросигнала
определялась расчетным путем по формуле:
Pпс
1
erfc(
)
2
2
,
(А.8)
где:erfc(z)–дополнение до единицы функции ошибок, а разность
Δ= (АКФмакс –L) соответствует «расстоянию»между максимумом АКФмакс и
порогом регистрации L, преодолеваемому шумом с распределением Гаусса и
дисперсией σ2.
Результаты
расчетов
суммарной
вероятности
ошибки
регистрации
синхросигналов по формулам (А.8) и (А.7) для различных значений отношения
смигнал/шум в канале приведены в табл.А.5.
171
–
Таблица А.5
Помехоустойчивость регистрации синхросигналов
Тип кода Баркера
Длина кода
C2/C13 C3/C13 C4/C13 C5/C13 C7/C13
Mm
Максимальный 26
39
42
65
91
37
39
62
87
уровень
выброса
АКФмакс
Порог
25
регистрации
синхросигнала
L
Отношение
Вероятность ошибки регистрации
сигнал/шум в
синхросигналов Ро
каналеEб/N0(дБ)
3.0
2.10-2
3.10-5
1.10-9
1.10-9
7.10-16
5.0
7.10-3
1.10-9
1.10-21
1.10-21
5.10-35
Из данных табл.А.5 следует,что при выборе длинных синхросигналов на
базе композитных кодов C5/C13 и C7/C13 вероятность ошибки регистрации
синхросигнала значительно меньше, чем типовое значение вероятности ошибки
бита в цифровых каналах мобильной связи(10-4…10-5). Результаты измерений,
полученные в разделе 4, показывают, что короткие канонические коды Баркера
такой помехоустойчивости не обеспечивают.
172
Рисунок А.7– Выход СФ С7 (Шум отсутствует)
Рисунок А.8 – Выход СФ С7 (Отношение сигнал/шум 3дБ)
Таким образом, синхронизация во времени систем с разнесенным приемом
может быть реализована с применением комрлзитных кодов Баркера. При этом
для обеспечения высокой помехоустойчивости длина кода должна быть
выбрана достаточно большой.
173
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1.Банкет В. Л., Кликич А. В. Международная деятельность в сфере связи и
информатизации: Учебное пособие. – Одесса: УГАС им. А. С. Попова, 2000.
– 79 с.
2.Europe and the Global Imformation Society/ Bangemann Report. Recommendation
to the European Counsil.1994 –P.40
3.Recommendation ITU-T Y.110(06/98)Global Information Infrastructure principles
and framework architecture
4.Recommendation ITU-T Y-2011(10/2004) Global Informaton Infrastructure,Internet
protokol aspects and Next Generstion Networks
5.Х.Y.Maeda,B.Moore.Standards
for
the
Next
Generation
Network//
IEEE
Communications Magazine, Vol.43,No.10, October,2005 p.33.
6.Битнер В.М.,Михайлова Ц.Ц.Сети нового поколения–NGN.Учебное пособие
для вузов.–М.:Горячая линия–Телеком,2011.–226 с.
7.Банкет Н. В., Горелкина С. Б., Заборская Н.К. Стрельчук Е. Н.,
Перспективные системы мобильной связи: технологии, экономика и
маркетинг:учеб. пособие–Одесса: ОНАС им. А. С. Попова, 2009.–С.111
8. Пригода В. М. Розвиток перспективних телекомунікаційних технологій і
послуг в Україні за умов глобалізації//Зв'язок, №3, 2010 –С.2-5
9.СкородумовА.И.Связь нового поколения//Электросвязь,№1,2010–С.3-6.
10.Вишневский В.М.,Портной С.Л.,Шахнович И.В.Энциклопедия WiMAX Путь
к 4G.Москва:Техносфера,2009,–472 с.
11.Современные телекоммуникации.Технологии и экономика. Под общей
редакцией С. А. Довгого.–М.: Эко-Трендз,2003.–320 с.
12.ГолышкоА.В.Развитие
систем
широкополосного
беспроводного
доступа//Вестник связи,№5, 2006–С.47-59.
13.Скляр
Б.
Цифровая
связь.
Теоретические
основы
и
практическое
применение. Изд. 2-е, испр.: Пер. с англ.–М: Издательский дом «Вильямс»,
2003. – 1004 с.
174
14.Банкет В.Л., Незгазинская Н.В., Токарь М.С.Методы пространственновременного кодирования для систем радиосвязи//Цифрові технології,
№6,2009 –С.5-16.
15.Gesbert D. From Theory to Practice: An Overview of MIMO Space-Time Coded
Wireless Systems //IEEE Journal on Selected Areas in Communications.– 2003.–
Vol.SAC-21, No.3, April, –P.281-302.
16.Банкет В.Л, Ищенко Н.А., Ель-Дакдуки А.С. Пространственно-временное
кодирование – эффективный метод помехоустойчивой передачи цифровой
информации в системах мобильной связи // Зв’язок , 2004, №8. – С.40 -43.
17.Вишневский В.М., Портной С. Л., Шахнович И.В. Энциклопедия Wi MAX:
Путь к 4G – М:Техносфера, 2009 –472 с.
18.Erceg V. Channel models for fixed wireless applications // IEEE Tech.Report, IEEE
802.16 Work Group,2003.
19.Dokument
IEEE
802.16a-03/01.Channel
models
for
Fixed
Wireless
Applications.Adopted 06-27-3003.
20.Alamouti S.M. A Simple Transmit Diversity Technique for Wireless
Communications //IEEE J. Select. Areas on Commun. –Vol. 16. No. 8. – 1998. –
P. 1451-1458.
21.Calderbank A.R Tarokh V., Jafarkhani H. Space-Time Block Coding from
Orthogonal Designs// IEEE Trans. on Inform. Theory. –1999– Vol. 45, No. 5.– P.
1456 – 1467.
22.М.С. Немировский, О.И. Шорин, А.И.Бабин, А.Л.Сартаков.Беспроводные
технологии от последней мили до последнего дюйма/под редакцией М. С.
Немировского.–М.:Эко-Трендз, 2009.–400 с.
23.J.P.Kermoal,L.Schumacher,K.I.Pedersen,P.E.Mogensen,F.Frederiksen. A Stochastic
NIMO Radio Channel Model With Experimental Validation// IEEE Journal on
Selected Areas in Communications/Vol.20,No.6, August2002,p.1211-1226
175
24.A.Algans,K.I. Pedersen, P.E.Mogensen.Experimental Analysis of Joint Statistical
Properties of Azimuth Spread,Delay Spread, and Shadow Fading//IEEE Journal on
Selected Areas in Communications.Vol.20,No.3,April 2002,p.523-531
25.Іщенко М.О. Сигнально-кодові конструкції для систем безпроводового
зв’язку з просторово-часовим кодуванням.Автореферат дис. на здобуття
наук. ступеня канд. техн. наук.Одеса:ОНАЗ.2009 –20с.
26.Банкет В.Л. Сигнально-кодовые конструкции в телекоммуникационных
системах – Одесса: Феникс, 2009. –180 с.
27.М.Б.Проценко,
И.Ю.Рожновская.
Анализ
математических
моделей
радиоканала для МИМО систем//Наукові праці ОНАЗ ім.О.С.Попова, №2,
2009, –С.3-9
28. Foschini G. Layered space–time architecture for wireless communication in a
fading environment when using multielement antennas. // Bell Laboratories
Technical Journal. –1996. – Vol.4. Autum. –P. 41–59.
29.Y.Okumura, E.Ohmory, T.Kawano, K.Fukua.Field strength and its variability in
UHF and VHF land-mobile radio service//Rev.Elec. Commun.
Lab.,Vol.16,No.9,1968 p.132-136
30.M.Hata. Empirical formula for propagation loss in land mobile radio services//
IEEE Trans. Veh. Technol. Vol.29,August,1980.p.317-325
31.Скляр Б. Цифровая связь. Теретические основы и практическое применение.
Изд. 2-е,испр.: Пер. с англ.–М: Издательский дом «Вильямс»,2003.–1004 с.
32.G. Foschini. Layered space–time architecture for wireless communication in a
fading environment when using multielement antennas. Bell Laboratories Technical
Journal, Vol.4.Autumn 1996. p. 41–59.
33.Банкет В.Л., Эль-Дакдуки А. С. Анализ методов разнесения в системах
безпроводной связи // Труды УНИИРТ.–№3(27).–2001.–С.15-22.
34.V.L.Banket,A.S. Dakdouki,N.K.Myckhailov, A.A. Skopa. Downlink Processing
Algorithms for Multi-Antenna Wireless Communications // IEEE
Communications Magazine, January, 2005– P.45-48.
176
35.D. Gesbert, M. Shafi, D. Shiu, P. Smith, A. Naguib. From Theory to Practice: An
Overview of MIMO Space–Time Coded Wireless Systems// IEEE Journal on
selected areas in communications, Vol,SAC-21, No.3, April 3003, p.281-302.
36.Банкет В.Л., Незгазинская Н. В., Токарь М. С. Методы пространственновременного кодирования для систем радиосвязи // Цифрові технології. –
2009. – № 6. – С. 5-16.
37.Петрович Н. Т. Новые способы осуществления фазовой телеграфии.
Радиотехника, 1957, № 10.–С.7-9
38.Петрович Н. Т. Способ проводной и радиосвязи фазо-манипулированными
колебаниями. А. с. 105692, приоритет от 22.02.1954.
39.Окунев Ю.Б.Теория фазоразностной модуляции.М.: Связь.1979.–216с.
40.Банкет В.Л.Дискретная математика в задачах теории цифровой связи:Учебн.
пособие–Одесса: ОНАС,2008.–118с.
41.D.Wang, X.Xia.Super-Ortogonal Differerntial Trellis Coding and Decoding//IEEE
Journal on Selected Areas in Communications, Vol.23,No.9,2003.p.1768-1798.
42. B.M.Hohwald, W. Swedens.Differential Unitary Space-Time Modulation//IEEE
Transactions on Communications,Vol.Com-48, No.12, December 2000, p.20412053.
43.Гельфонд А.О.Исчисление конечных разностей.М:Гостехиздат,1952.156 с.
44.Банкет В.Л. Методы пространственно-временного кодирования для систем
радиосвязи / В.Л. Банкет, Н.В. Незгазинская, М.С. Токарь // Цифрові
технології. 2009.– №6. – С. 5 - 16
45.Банкет В.Л.,Тотміна Ю.М. Патент на корисну модель №76776 «Система
передавання інформації по каналах багатоантенного радіозв’язку в умовах
завмирань».
Зареєстровано
в
Державному Реєстрі
патентів
України
Композитные
Баркера//Цифровые
10.01.2013
46.Банкет
В.Л.,
Токарь
М.И.
технологии, №2,2007.–С.7-18
коды
177
48. Hanzo L., Akhtman Y., Wang L., Jiang M. MIMO-OFDM for LTE, WIFI and
WIMAX: Coherent versus non-coherent and cooperative turbo-tranceivers. –
United Kingdom: Jonh Wiley & Sons Ltd , 2011. – 658 p.
49.K.Feher.
Wireless
digital
Jersey,0758.1999.-520p.
communications.Prentice-Hall
PTR,New
50.Jiang M. Multiuser MIMO-OFDM for Next-Generation Wireless Systems / Jiang
M., Hanzo L. // Proceedings of the IEEE, Vol 95, No. 7. – July, 2007. – с. 14301469
50.Chang R.W. Synthesis of band-limited orthogonal signals for multichannel data
transmission / Chang R.W. // Proceedings of the IRE, Vol. 45. – December, 1966.
– р. 1775-1796
51.A.R.S.Bahai, B.R.Saltzberg, M.Ergen.Multi-Carrier Digital Comutications.Theory
and Applications of OFDM.Second edition.Springer Press.Boston,2004.370p.
52.L.Lampe,R.Schrober.Differential Modulation for OFDM/Proceedings of 6th
OFDM-Workschop.Hamburg,2001.2001.p.19-1-19-4
53.R.Fischer,L.Lampe.Coded
Application
to
Modulation
for
OFDM/IEEE
Noncoherent
Transactions
Reception
on
with
Vehicular
Technology,Vol.50,No.4,July 2001.p.910-917
54.Окунев Ю.Б.Теория фазоразностной модуляции.М.: Связь.1979.–216с.
55. Банкет В.Л., Тотмина Ю.Н. Развитие теории дифференциальных методов
модуляции
для
современных
цифровых
телекоммуникационных
систем(Представлено а журнал «Цифровые технологии»).
56.В.А. Балашов,А.Г.Лашко, Л. М.Ляховецкий.Технологии широкополосного
доступа xDSL.Инженерно-технический справочник/Под общей редакцией В.
А. Балашова.–М: Эко-Трендз,2009,–256 с.
57. В.А. Балашов, П.П. Воробиенко, Л. М.Ляховецкий.Системы передачи
ортогональными грмоническими сигналами.М: Эко- трендз, 2012.–228с.
178
58. Банкет В.Л., Тотмина Ю.Н. Развитие теории дифференциальных методов
модуляции для cовременных цифровых телекоммуникационных
систем/Цифровые технологии.№10,2011.–С.43-54
59.Barker R.H.Ground synchronizing of binary digital system
theory–1953. –Vol.7. №2. P.273 –287.
//Communication