000199 000009 003475244-Повышение эффективности автоматизированной восстановительной механической
реклама

003475244
На правах рукописи
2 О АВ Г 2009
ЧЕПЧУРОВ МИХАИЛ СЕРГЕЕВИЧ
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ АВТОМАТИЗИРОВАННОЙ
ВОССТАНОВИТЕЛЬНОЙ МЕХАНИЧЕСКОЙ ОБРАБОТКИ
КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ ПУТЕМ
ИДЕНТИФИКАЦИИ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
Специальности
05.13.06 - Автоматизация и управление технологическими
процессами и производствами (технические системы)
05.02.08- Технология машиностроения
Автореферат диссертации на соискание ученой степени
доктора технических наук
Москва-2009
Работа выполнена в ГОУ ВПО «Белгородский государственный тех­
нологический университет им. В.Г. Шухова»
Научные консультанты:
доктор технических наук, профессор
Погошш Анатолий Алексеевич,
доктор технических наук, доцент
Феофанов Александр Николаевич
Официальные оппоненты:
доктор технических наук, профессор
Аверчееков Владимир Иванович
доктор технических наук, профессор
Воровшжо Владимир Павлович
доктор технических наук, профессор
Ерёменко Юрий Иванович
Ведущая организация:
ГОУ ВПО «Тамбовский государст­
венный технический университет»
Защита диссертации состоится «15» октября 2009 г. в 10-00 часов
на заседании диссертационного совета Д 212.142.03 при ГОУ ВПО Мос­
ковском государственном технологическом университете «СТАНКИН» по
адресу: 127994, Москва, Вадковскнй пер., д. За.
С диссертацией можно ознакомиться в библиотеке ГОУ ВПО
МГТУ «СТАНКИН».
Автореферат разослан «29» июля 2009 г.
Учёный секретарь
диссертационного совета,
канд. техн. наук, доц.
Семячкова Е.Г.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Машиностроение - отрасль промышленности, определяющая развитие
экономики на любой социальной формации современного общества. Интен­
сификация машиностроения, перевод его на инновационный путь развития
позволит значительно увеличить темпы развития других отраслей промыш­
ленности и экономики в целом.
Аісіѵальность проблемы.
Повсеместность использования крупногабаритных деталей, высокая себе­
стоимость их обработки при слабой изученности явлений, обусловленных
состоянием детали и условиями обработки, делает проблему повышения эф­
фективности технологических процессов их обработки актуальной в мас­
штабах ЭКОНОМИКИ всей страны.
Изделия машиностроительного производства составляют основу любого
оборудования - от электроники до производства строительных материалов.
В любой машине, установке, технологическом комплексе присутствуют
крупногабаритные детали, как правило, составляющие основу конструкции.
Изготовление таких деталей, их восстановление и ремонт требуют использо­
вания специального оборудования и технологий. Подобное оборудование в
настоящее время напою применение как на машиностроительных предпри­
ятиях, так и в ремонтных службах предприятий различных отраслей про­
мышленности, например, горнорудных, цементных заводах, химических
предприятиях. Оборудование представляет собой либо уникальные крупно­
габаритные станочные комплексы, либо специальные станочные модули для
нестационарной обработки.
Конструкции подобного оборудования к настоящему времени тщательно
проработаны, а технологии обработки отлажены. Таким образом, добиться
повышения производительности изготовления и восстановления крупногаба­
ритных деталей с использованием применяемых станочных комплексов в
составе технологических систем за счет совершенствования применяемых
технологий или оптимизации конструкции практически невозможно. Многие
современные работы посвящены автоматизации самого процесса обработки
крупногабаритных деталей, но идеи, высказанные в них, прошли слабую
промышленную апробацию, это связано, прежде всего, с высокой стоимо­
стью экспериментальных исследований. Автоматизация процессов обработ­
ки крупногабаритных изделий позволяет значительно уменьшить стоимость
механической обработки за счет снижения трудозатрат.
Крупногабаритные детали являются уникальными, их стоимость состав­
ляет миллионы рублей, например, стоимость бандажа цементной печи диа­
метром 5 метров на предприятии ОАО «Волгацеммаш» составляет 2 900 000
рублей, поэтому при обработке неисправимый брак исключён. Сама обра­
ботка из-за состояния припуска может вестись с вибрациями или ударными
нагрузками, да и сам припуск может быть неоднородным. В начале 1970-х
годов Б.С. Балакшнным, Ю.М. Соломенцевым, В. А. Тимирязевым и другн-
4
ми была предложена и реализована идея адаптивных станочных модулей.
Подобные станочные модули позволяют реализовать эффективную обработ­
ку деталей с неравномерным припуском, при условии наличия быстродейст­
вующих исполнительных механизмов, но в условиях вибраций, ударной на­
грузки, неравномерного по структуре материала припуска они малоэффек­
тивны. Для управления исполнительными механизмами оборудования тре­
буются устройства, идентифицирующие, как можно более полно, всю тех­
нологическую систему, только в этом случае моиаю добиться снижения
стоимости самой обработки при неизменных качественных характеристиках
получаемого изделия. Отсутствие результатов теоретических и эксперимен­
тальных исследований, учитывающих особенности условий получения
крупногабаритных деталей, особенности восстановительной механической
обработки, влияние на технологические параметры ударной нагрузки и виб­
раций, вызванных неоднородностью припуска, не позволяет создать высоко­
эффективные технологии восстановительной обработки.
Разработка технических и технологических решений, учитывающих
влияние состояние припуска обрабатываемой заготовки и условий обработки
на параметры, определяющие эффективность технологического процесса,
создание устройств идентифицирующих параметры технологической систе­
мы, внесёт значительный вклад в развитие экономики страны и повышение
её обороноспособности.
Цель работы. Повышение эффективности автоматизированной механи­
ческой обработки крупногабаритных деталей путём идентификации техноло­
гических параметров на основе научно обоснованных методик, алгоритмов и
решений.
Для достижения цели необходимо решить следующие задачи:
1. Определить наиболее значимые параметры технологической системы
механической обработки крупногабаритных деталей.
2. Разработать методики и алгоритмы идентификации параметров техно­
логической системы восстановительной обработки крупногабаритных дета­
лей.
3.Разработать подсистему контроля и регистрации параметров восста­
новительной механической обработай крупногабаритных деталей.
4. Разработать методики и алгоритмы автоматического активного кон­
троля погрешности формы в поперечном сечении обрабатываемых крупно­
габаритных деталей.
5. Разработать алгоритмы управления оборудованием для обработки
крупногабаритных деталей с учетом подсистемы идентификации технологи­
ческих параметров.
6.Разработать структуры технологических процессов восстановительной
обработки крупногабаритных деталей, использующих подсистемы иденти­
фикации технологических параметров.
5
Рабочая гипотеза. Повышение эффективности восстановительной меха­
нической обработки крупногабаритных деталей может быть достигнуто за
счёт внедрения в технологическую систему подсистемы идентификации па­
раметров при автоматизированной или автоматической обработке.
Методология н методы исследований. В процессе теоретических и экс­
периментальных исследований автором изучены, проверены и обобщены
результаты существующих научных разработок в области управления техно­
логическими системами и комплексами, технологий восстановительной об­
работки крупногабаритных деталей, методов контроля и регистрации пара­
метров технологических систем.
При разработке структур технологических модулей автором использован
системный подход к изучению и описанию их технологических и конструк­
тивных параметров, определено влияние основных параметров процесса вос­
становительной обработки крупногабаритных деталей на качество рабочих
поверхностей. С этой целью использовались методы системно-структурного
анализа, теории размерностей и нечеткой логики, аппарат булевой алгебры.
Исследования проводились с использованием виртуальных и физических
моделей, стендовых испытаний и в условиях реального производства, на ос­
нове чего определялись состав и структура систем управления производст­
венными модулями и конструктивные параметры специального оборудова­
ния.
Достоверность научных положений, выводов и рекомендаций обеспе­
чена принятыми в основу объективно существующими математическими и
физическими законами и закономерностями, и подтверждается использова­
нием методов планирования экспериментальных исследований и статистиче­
ских методов обработки результатов, применением современных измери­
тельных средств и комплексов на основе вычислительной и микропроцес­
сорной техники, допустимым интервалом сходимости результатов теорети­
ческих и практических исследований, положительным опытом внедрения
результатов.
Научная новизна ваботы включает в себя:
- связи в технологической системе, отражающие влияние неоднородности и
неравномерности припуска на технологические параметры обработки и гео­
метрические характеристики восстанавливаемой детали;
- модель, учитывающую стохастическое изменение мощности резания и вы­
явленные закономерности износа режущего инструмента;
- алгоритм автоматизированного управления технологическим процессом
восстановительной механической обработкой крупногабаритных деталей на
основе метода идентификации параметров обработки, учитывающий потреб­
ление мощности приводами оборудования, глубину резания, неоднородность
и неравномерность припуска обрабатываемой поверхности;
6
- структуру подсистемы идентификации параметр'ов механической обработ­
ки, созданной на основе правила, требующего не менее двух входных пере­
менных для идентификации параметра;
- алгоритмы регистрации параметров обработки, формы детали в попереч­
ном сечении с оценкой коэффициента круглости, позволяющие разрабаты­
вать специальное программное обеспечение для управления оборудованием
и устройствами для виброрезания;
- модели контроля технологических параметров и формы детали в попереч­
ном сечении, являющейся основой для разработки приборов контроля и ре­
гистрации параметров обработки, устройств виброрезания и специальных
станочных модулей.
Основные положении, выносимые на защиту:
- впервые разработанная подсистема идентификации параметров механи­
ческой обработки крупногабаритных заготовок, основанная на разработан­
ных моделях, алгоритмах и методиках идентификации;
- результаты проведенных теоретических и экспериментальных исследо­
ваний по установлению закономерностей влияния ударной нагрузки, нерав­
номерного по структуре материла припуска, а также дефектов после наплав­
ки на глубину и мощность резания при токарной обработке крупногабарит­
ных заготовок;
- разработанная методика моделирования технологических процессов то­
карной обработки крупногабаритных деталей, учитывающая неравномер­
ность и неоднородность материала припуска;
-правила идентификации параметров токарной обработки: глубины ре­
зания, мощности резания, скорости резания, усилия резания, амплитуды и
частоты вибраций, требующие для идентификации параметра не менее двух
входных переменных;
- предложенная и реализованная модульная технология восстановитель­
ной обработки крупногабаритных деталей без их демонтажа, отличающаяся
разделением технологической системы на подсистему механической обра­
ботки, и устройства контроля и управления;
-разработанная методика проектирования технологических процессов
автоматизированной обработки крупногабаритных заготовок, учитывающая
подсистему идентификации мощности резания, глубины резания, геометри­
ческую форму детали в поперечном сечении, параметры вибраций в техноло­
гической системе.
Практическая значимость результатов проведенных исследований. Ре­
зультаты теоретических исследований позволяют разрабатывать новые тех­
нологии обработки крупногабаритных деталей, в том числе и без их демон­
тажа. Получены практические рекомендации по использованию адаптивной
модульной технологии и созданию новых образцов оборудования. Особо
следует отметить, что результаты работы внедрены на производственных
7
предприятиях, и согласно расчетам планово-экономической службы, позво­
ляют снизить себестоимость восстановления крупногабаритных деталей ме­
таллургического оборудования на 15%.
Внедрение результатов: результаты внедрены на ОАО «Оскольский
электрометаллургический комбинат» в ремонтно-механическом цехе и ис­
пользуются для восстановления корпуса подшипника эксцентрика механизма
качания кристаллизатора машины непрерывного литья, роликов машин не­
прерывной разливки стали, ОАО «Стойлекскнн горно-обогатительный ком­
бинат». Методика контроля н регистрации мощности резания внедрена в
ОАО «СКИФ-М» и используется для оценки энергетических показателей
сборных фрез. Результаты исследовании использованы при чтении лекций,
выполнении лабораторных работ по дисциплине «САПР ТП», «Управление
системами и процессами в машиностроении» и «АГГП в машиностроении»
для студентов дневной ц заочной формы обучения по специальности 151001
«Технология машиностроения». Изданы учебные пособия с грифом УМО
AM, подготовлены учебники.
І!іййЩ?ДШІШ-п0 теме диссертации опубликованы: монография, 30 ра­
бот в периодических изданиях, в том числе 14 работ в изданиях, рекомендо­
ванных ВАК, получено 7 патентов на полезные модели.
Апсоб|іШШ_І22^°ДЫ: основные положения диссертационной работы
представлены: на: Всесоюзной научной конференции «Энергоресурсо­
сберегающие технологии», БТИСМ (Белгород 1991 г.); Международной
конференции «Ресурсосберегающие технологии строительных материалов,
моделей, конструкций. Системотехнические принципы управления ТП»
(Белгород, 1993 г.); Общероссийской конференции «Современные наукоем­
кие технологии» (Сочи, 2002 г.); Международной конференции «Моделиро­
вание как инструмент решения технических и гуманитарных проблем» (Та­
ганрог, 2002 г.); Международной научно-технической конференции студентов,
аспирантов и молодых ученых «Прогрессивные направления развития машино-приборостроительных отраслей и транспорта» (Севастополь, 2004 г.); Ме­
ждународной конференции «Техника и технология монтажа машин (ТТММ'
04)» (Польша, Ржешов, 2004 г.); Научно-технической конференции «Метал­
лургия» (Старый Оскол, 2006 г.); Конференции «Шумные исследования, наноситемы н ресурсосберегающие технологии в стройиндустрии» (Белгород,
2006 г.); International Scientific Conference (V; 2006; Rzeszow, Poland rok: 2006
г.); Международной научно-технической конференции «Автоматизация:
проблемы, идеи, решения» (Севастополь, 2003 г.).
Структура диссертации: диссертация состоит из введения, шести глав,
общих выводов, списка литературы, приложений. Объем диссертации 290
страниц, в том числе 135 рисунков и 14 таблиц, список литературы состоит
из 191 наименования.
8
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована аісгуальность темы диссертации, сформулиро­
вана цель работы и определены основные задачи, которые необходимо ре­
шить для се достижения. Показана научная новизна и практическое значение
полученных результатов.
В_п£ЕЭ2Й_Ы2Н£_ выполнен анализ результатов экспериментальных и
теоретических исследований в области разработки основ технологии обра­
ботки крупногабаритных заготовок и специального оборудования для вос­
становления крупногабаритных деталей технологического оборудования
без их демонтажа. Значительный вклад в развитие теории и практики спе­
циальных технологий восстановления крупногабаритных деталей техноло­
гического оборудования, в том числе без их демонтажа, внесли такие учё­
ные, как А.А. Погошш, Н.А. Пелипенко, И.В. Шрубченко, JO.A. Бондаренко.
Анализ работ этих учёных показал отсутствие в них исследований по влия­
нию условий обработки и состояниятехнологическойсистемы на эффектив­
ность технологического процесса.
Один из путей повышения эффективности технологических процессов
- использование адаптивного управления станочным оборудованием, ос­
новоположниками которого являются Б.С. Балакшіш, ІО.М. Соломенцев,
В.А. Тимирязев, Е.И. Луцков, СП. Протопопов. В работах A.M. Дальскоіо
и А.Г. Суслова рассмотрены вопросы прогнозирования механической обра­
ботки, но, как и при автоматизированном управлении, так и при прогнозиро­
вании обработки требуется идентификация параметров технологической сис­
темы. Эгот вопрос может быть решен при наличии научно обоснованных
методик, алгоритмов и приборов, объединённых в единую подсистему, яв­
ляющуюся частью технологической системы обработки крупногабаритных
деталей.
Рассмотренные в работе примеры деталей металлургического оборудова­
ния и результаты данных экономической службы ОАО «ОЭМК» позволили
оценить целесообразность проведения мероприятий по внедрению новых
технологий обработки крупногабаритных деталей. Экономия времени на ме­
ханической обработке не должна превышать 15% от суммарного времени
выполнения операции восстаноачения детали.
При проведении исследований, позволяющих получить научную основу
для разработки эффективных автоматизированных технологических систем
обработки крупногабаритных заготовок, составляют ранее известные моде­
ли и алгоритмы назначения режимов обработки, базирования крупногаба­
ритных деталей при обработке нестационарными станочными модулями,
основы создания специального станочного оборудования, и подсистема
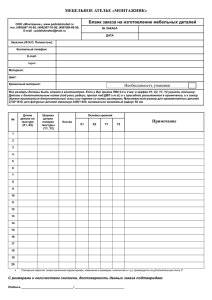
идентификации состояния технологической системы, базирующаяся на ранес неизвестных алгоритмах и моделях, учитывающих неисследованные связн в технологической системе. Структуру научного исследоваиия можно
представить в виде диаграммы, изображенной на рис. 1
Модели и алгоритмы
назначения режимов
обработки
Технологическая сис­
тема обработки круп­
ногабаритных загото­
вок
/
\
Алгоритмы
управления
обработкой
крупнога­
баритных
заготовок
Модели и алгоритмы
базирования крупно­
габаритных деталей
.JL.
Алгоритмы и модели
идентификации
крупногабаритных
деталей
Модели и алгоритмы
проектирования кон­
струкций оборудо­
вания
^
Структуры систем
управления
У
А-"
Алгоритмы
и модели
идентифика­
ции пара­
метров об­
работки
Идентификация пара­
метров технологической
системы
S
9 Ё
Ч
В
о
о(X
и
я)
X
Глѵбі
ост
і
•я
я
я
и
Вибр
с
•а
8 5>
о но' х
Рнс. 1. Структура исследования технологических систем обработки крупногабарит­
ных деталей
Анализ работ В.Г. Митрофанова, С. Н. Григорьева, А. С. Верещака,
А.Н. Овсеенко, В.К. Старкова, В.П. Вороненко, В.Н. Брюханова, И. М. Коле­
сова, М.Г. Косова, Н.М. Султан-Заде, В.Н. Подураева показал, что наиболее
значимыми параметрами технологического процесса механической обра­
ботки деталей являются: скорость резания, мощность резания, глубина ре­
зания, стойкость инструмента, частота и уровень вибраций в технологи­
ческой системе.
Во второй главе дано теоретическое обоснование структуры подсистемы
идентификации параметров восстановительной механической обработки
крупногабаритных деталей. Переход от аналитических алгоритмов к алгорит­
мам формальной логики позволяет освободить пользователя от предваритель­
ных расчётов и поиска оптимальных решений, при разработке технологиче­
ских процессов механической обработки. Задача разработчика автоматической
системы управления станком заключается в организации обмена информацией
между различными модулями системы управления. Идентификация парамет­
ров механической обработки должна осуществляется с использованием под­
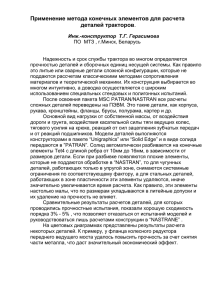
системы идентификации технологических параметров, структурная схема ко­
торой изображена на рис. 2.
Рис. 2. Структурная схема подсистемы идентификации параметров механиче­
ской обработай коѵпігагабашггных детален
Функции идентификации скорости и глубины резания выполняет датчик
положения. При нестационарной обработке скорость определяется из расчёта
и
времени между стробирующими импульсами, а при обработке на стационар­
ном оборудовании возможен контроль скорости посредством эпкодера.
При определении глубины резания выполняются следующие преобразо­
вания.
Величину сигнала с датчика U, В, можно определить но формуле
U = k{Rt-Ra),
(1)
где к - постоянная прибора, В/мм; R6 - базовый радиус детали, мм; Rj - ра­
диус детали, мм.
Восстановленная на основе измерений поверхность детали передаётся в
модели, воспроизводящие процесс обработки.
Массив информации о форме детали является матрицей, каждый элемент
которой представляет координату радиус-вектора точки поверхности
г
м
І2
'2,1
Г
2,2
V
(2)
'«.2
'Ъ. ' 2 , ,
где R — матрица массива информации; г - радиус-вектор; п - коме]» точки на
окружности; т - номер окружности.
Если имеются искажения формы детали и дефекты на ее поверхности, то
необходимо вычислить фактическую глубину резания, мм, в каждой точке
поверхности:
tp=Bd-max(R)-t
,
(3)
где t - заданная глубина резания, мм.
Нахождение координат точек производится следующим образом:
Координата по оси Л'
X=cos(Krj)Hb
(4)
где / - номер окружности, / - [0...m];j - номер точки на окружности поверх­
ности,./' = [ft..и]; К) - коэффициент интерполяции, определяемый, как Kj =
360%.
Координата по оси У
Y = sm(K,j)Rd,
(5)
Координата по оси Z
Z=((m-))n+j)S/n.
(6)
Идентификация погрешности формы крупногабаритной детали рассмот­
рена на примере бандажа цементной печи.
Прямыми измерениями получить достоверную информацию о парамет­
рах формы не представляется возможным. Использование способа аппрок­
симации дугами с перекрытием позволяет вывести математические зависи­
мости для получения параметрической модели сечения детали. Геометриче­
скую модель контура бандажа можно отобразить с помощью следующей
системы уравнений:
12
2
(*l
(ь
-о) 2 +0', -bf = ,- л ) 2 + (л -bf = г3
(7)
=г
(-v, -а) 1 + (,ѵ, -bf
( A - J - . T , ) 2 + ( X , - ѵ,)3
=/2.
где х и j ' - координаты соответствующих точек бандажа, мм; а - проекция
аппроксимирующего отрезка на ось х, мм; b - проекция аппроксимирующего
отрезка на ось у, мм; / - дайна аппроксимирующего отрезка, мм.
Координаты точек дуг измеряются в процессе вращения бандажа в одном
пололсеиии. По результатам расчетов создается массив значений радиусов я
координат точек каждой дуга в положении измерения.
Как установлено в ходе исследования восстановительной обработки
крупногабаритных детатей, имеющих форму тел вращения, основным пара­
метром, определяющим требуемую работоспособность узла, является задан­
ная крутость формы бандажей и опорных роликов в поперечном сечении.
В ходе моделирования был проведен анализ изменения параметров сече­
ния при реализации процесса пошагового приближения формы к окружно­
сти. По результатам измерений для произвольного контура построена раз­
вертка радиусов по сечениям.
В качестве параметра, характеризующего относительное отклонение
формы бандажа от круглости в поперечном сечении, предложен коэффици­
ент относительной круглости формы, который может быть описан выраже­
нием:
V=II"W-^)T-L--'
(8)
/«1
где Л, - значение радиуса / -и дуги контура; п - количество аппроксими­
рующих дуг; Кь — принятое для расчета значение базового радиуса. Геомет­
рическая интерпретация коэффициента КМі, представлена на рис.3.
Предложенный способ представления контура поперечного сечения бан­
дажа в виде сопряженных дуг дает теоретические основы для реализации
измерения параметров формы во время вращения. Оценка формы в попереч­
ном сечении с использованием коэффициента круглости позволяет произво­
дить контроль исправления формы в процессе восстановительной обработки.
Для вычисления величины погрешности предлоясена следующая методи­
ка:!) выполняется восстановление контура поперечного сечения;
2) определяется радиус и координаты центра максимальной вписанной в
контур окружности; 3) определяется максимальное расстояние от центра
вписанной окружности до контура сечения; 4) вычисляется величина откло­
нения от круглости, как разность между максимальным расстоянием до кон­
тура и радиусом вписанной окружности. Схема восстановления контура се-
13
чения детали по результатам измерений показана на рис. 4, где Д1...ДЗ дат­
чики устройства определения сечения детали.
1=1 . Л
—
.
.—._ функция значении радиусаб аппроксиг/иру&щих дуг
..
линия среднего радиуса
—
линия базобато радиуса
Рис. 3. Геометрическая интерпретация коэффициента относительной круглосіи
Исходные значения координат точек, полученных в положении измере­
ния:
ч
В ходе восстановления используются сле­
дующие зависимости:
модули векторов:
К | = ѴМ,м - ф2... ) 2 + М и - ср2ІЛ f ;
(9)
начальный угол:
\& <& (£)
(10)
угол между двумя векторами в положении
Рис. 4. Схема восстановления измерения:
c
контура сечения детали
Phi~cp2ii
, с / ; 2 / 2 -срЗ і 2
ar,=arctan—
— — areiaii
— •
ср\п-ср2ІЛ
ср2и~срЗіЛ
(И)
Вычисление координаты начала и конца каждого из векторов в новом их
положении при повороте контура бандажа:
•ѵ, "| (хм \
fcos( а, + а„)
I sin( a , + а „)
14
Моделирование восстановления выполнено с использованием программы
Ma/hCAD.
Результатом моделирования воссоздания контура в поперечном сечении
является массив значений координат х, и у, контура
ptt := (Хг ...Х„);
pt2 := {уг ... у 2 ).
Расстояние от центра вписанной окружности до любой точки на контуре
будет определяться по формуле L( ~ TJ(XC - усУ+(Хі - у,) 2 .
Из всех значений расстояний от центра окружности до контура выбирает­
ся максимальное - Цшк. Тогда максимальная погрешность, мм, составит:
Л
,,„* = L„„s
-К,-
При анализе признаков идентифицируемых параметров получены сле­
дующие правила:
1. Идентификация входного параметра требует не менее двух перемен­
ных.
2. Для идентификации параметра технологического процесса требуется
наличие его адекватного представления.
З.При наличии возможности следует переходить от количественной
оценки параметров к логической.
Подсистема идентификации параметров механической обработки реали­
зуется в виде модуля контроля при использовании модульной технологии, в
соответствии с которой могут быть реализованы различные варианты техно­
логических решений:
1 - восстановительная обработка с использованием активного контроля
(модуль контроля и модуль обработки);
2 - контроль параметров геометрической формы объекта с автоматизиро­
ванной обработкой и сохранением информации в базе данных (модуль кон­
троля и блок обработки и анализа информации);
3 — плановая восстановительная обработка крупногабаритной детали с
использованием методов идентификации параметров технологического про­
цесса (модуль обработки и блок хранения и анализа информации);
4 •— восстановительная обработка с использованием активного контроля,
анализа информации и идентификацией технологических параметров обра­
ботки (модуль контроля, модуль обработки и блок хранения и обработки ин­
формации).
В третьей главе рассмотрены вопросы обработки заготовок с ударной
нагрузкой н неоднородным припуском.
Для определения параметров обработки с ударной нагрузкой деталей,
имеющих дефекты наплавки, выполнено моделирование взаимодействия
инструмента н детали в зоне резания, с использованием конечноэлементного анализа.
В качестве режущей части инструмента принят твердый сплав Т5К10
ГОСТ 3882-74: модуль Юнга 3.5е5 мПа; коэффициент Пуассона 0,3; плот­
ность, для упрощения геометрических построений и сокращения итераций
15
при расчете плотность принята равной 30 000 кг/м . В качестве материала
детали - стань со свойствами: модуль Юнга 3.5е5 мПа; коэффициент Пуас­
сона 0,3; плотность - 8300 кг/м .
Анализ полученных расчётов позволил выявить режимы, при которых
возможна работа инструмента без поломок. Данные расчёта, используемые в
конечно-элементной модели, позволили впервые смоделировать излом ре­
жущей части инструмента. Результаты этого моделирования представлены
парне. 5.
г Ж ' ; , . : : : " : : ^ ^ . - '.
yt\::\;.:
Рис. 5. Излом в режущей части инструмента
механические напряжения, возникающие в зоне резания при оораоотке
материала с неоднородными по свойствам, определены также с помощью
программы, использующей метод конечно-элементного анализа. Результаты
конечно-элементного анализа напряжений в режущей кромке инструмента
для сплава Т15К6 показали, что механические напряжения при обработке
сплошного материала и материала с неоднородной структурой, отличаются
незначительно.
Расчёт смещения режущей кромки инструмента с использованием конеч­
но-элементного анализа позволил выявить режимы, при которых смещение
составляет всего 0,064 мм (для скорости резания - 140 м/ мин; усилия реза­
ния 1800 Н), что значительно ниже обычного смещения в диапазоне скоро­
стей от і 00 до 190 м/міш, и усилий от 1400 до 2400 Н.
Пересчет длительности действия усилия резания в скорость резания про­
изведён из условия: высота выбранного сегмента заготовки - 20 мм. При
превышении смещения значения 0,17 мм происходит излом режущей части
твердосплавной пластины, таким образом, инструмент становится непри­
годным для дальнейшего использования. При конечно-элементном анализе
смещения режущей кромки при обработке сплошного материала это явление
не наблюдается. Дня найденных значений скорости и усилия резания были
выполнены уточняющие расчёты.
Таким образом, можно сделать вывод, что это явление связано с нерав­
номерностью структуры обрабатываемого материала. При обработке по-
16
верхиостсй, имеющих неравномерную структуру материала, неизменно воз­
никают колебания режущей кромки инструмента [33], которые приводят к
изменению как сил в зоне резания, так и абсолютного смещения режущей
кромки.
При обработке детали с неравномерным припуском появляется дополни­
тельная сила А/*',, вызывающая дополнительные периодические перемеще­
ния режущей части инструмента, причем эти колебания происходят с часто­
той, определяемой значениями параметров системы.
На основе модели, отображающей уменьшение смещения режущей кром­
ки инструмента, можно объяснить эти смещения периодическими колеба­
ниями инструмента, вызванных неоднородностью припуска.
Сила А/%, вызывает смещение режущего инструмента на величину а, м,
величина этого смещения определяется составляющей силы резания,
действующей вдоль оси режущего инструмента, его величину можно
определить из выражения
где ту - масса подвижных частей дополнительного устройства для виброре­
зания, кг; h - коэффициент демпфирования для соответствующего устройст(ОТ,+ІЯ, + ІЦѴ» + (А, + Л,)О + <^—™)<7-F-sin(-2!l—) = o,
(12)
ва, Н; с - коэффициент жёсткости пружины для резца (державки резца) и
дополнительного устройства для виброрезания; со - круговая частота колеба­
ний вершины резца, рад-с*1.
Согласно (12) для компенсации колебаний режущего инструмента, к нему
следует приложить периодически изменяющуюся сипу, смещение её фазы
должно составлять 180°.
Представленная на рис. 6 Simulink-модепь воспроизводит процесс меха­
нической обработки с расчетом мощности резания в каждой точке поверхно­
сти детали. Полученная информация сохраняется в виде вектора Л7Ѵ, на ос­
нове которой производится построение соответствующего графика. В пере­
менной Т% накапливается значение износа инструмента.
Последовательная выборка элементов из массива радиус-векторов (Sup),
содержащих информацию о поверхности детали, осуществляется в блоке
Selector . Блок Chard формирует текущее значение счетчика для каждого
элемента массива. В том случае, если текущее значение глубины резания
отрицательно, то блок Switch выбирает его нулевое значение.
Прогнозирование значения мощности резания производится в блоке Ром>••
erJorwwd_step.
[^г-В
* %
r*--J-JDE
Рис. 6. Simulink-Moppnb с прогнозированием мощности обработк
18
Блок Power выполняет расчет текущего значения мощности резания,
кВт, в продольном направлении текущее значение мощности резания выво­
дится на экран виртуального осциллографа (блок Scope).
Особенностью модели является наличие элемента задержки (Transport
Delay), учитывающей запаздывание реакции привода оборудования. Значе­
ние подачи, мм/об, вычисляется согласно выражению:
s=M—-Г
(,3)
где т - номер текущего шага дискретизации; Срі~ коэффициент сил резания;
хіП, ур пр- показатели степеней. Согласно рекомендациям из [10], СР = 315;
Расчет подачи ведется для следующего шага, т.е. из расчёта прогнози­
руемого значения мощности в зависимости от глубины резания. Но величина
шага дискретизации, мм, зависит от скорости резания и времени реакции
системы контроля:
60г
где т - величина времени реакции системы, с.
.Выражение (14) имеет значение для практической реализации схемы кон­
троля припуска, оно определяет расстояние, на котором размещается датчик
контроля припуска.
Исследования мощности резания для обработки материалов с неоднород­
ным материалом припуска выполнены с использованием аналоговых моде­
лей.
Модели позволили получить теоретические значения изменения мощно­
сти резания при обработке крупногабаритных деталей.
Исходя из условия, что всё время обработки поделено на равные дис­
кретные участки, остаточная стойкость инструмента в процентах может быть
выражена:
7>M(F»--£7; >
(15)
где Т— текущее значение периода стойкости, %; /• — количество точек дискре­
тизации.
Из выражения (15) становится ясным, что чем больше точек дискретиза­
ции, тем точнее расчет остаточной стойкости.
Преобразовав соответствующим образом выражение (15), можно опре­
делить текущее значение периода стойкости
TiS-±™-%>
е
и
и
где т, - длительность измеряемого периода времени, с.
06)
19
Из выражения (16) условие идентификации поломки инструмента Т,< Т.
Модель идентификации стойкости инструмента представлена на рис. 7.
Известные
параметры
У
~{С~ /
„
^
Расчет текущего X
процентного из)
носа
[Задаваемые
К5Е2М5ПІЙ.
(идентифицируемые
параметры
|П]ЗОВ
ІДОЭЗЛЕ наличие «мгновенного» износа
_7^
Л
/ Определение
( остаточной
V стойкости
/-
:.]
я
ё М
йг
а о
С
V 1 а
Прекращение
работы (Авария)
Рие.7. Модель идентификации стойкости инструмента
Входные параметры модели разделены на задаваемые, известные и иден­
тифицируемые. К первым относятся коэффициенты, учитывающие свойства
материала, условия обработки и т.п. Известные параметры задаются опера­
тором и программой в начале обработки, т.е. устанавливаются системой, к
ним в кашей модели можно отнести подачу. К идентифицируемым парамет­
рам следует относить параметры, значение которых определяется в процессе
обработки, в нашем случае определяется скорость на заданном дискретном
временном интервале.
Амплитуда колебаний в технологической системе только теоретически
моисет иметь нулевое значение. К тому же значение амплитуды всегда будет
находиться рядом с определённым значением. Примененк
ционных
«жёстких» систем управления в этой ситуации невозможно а'
;тся при­
менение автоматизированных систем управления, учитываі ,
рнближение измеренного значения входного сигнала к требуемой величине. Поэтому
автором доказана необходимость использования системы управления, осно­
ванной иа нечёткой логике (Fuzzy Logic).
С помощью нечеткой логики можно добиться снижения требований по
быстродействию к аппаратному и программному обеспечению. Во многих
случаях сложное математическое моделирование предпочтительнее заменить
функциями принадлежности и правилами нечеткой логики и с их помощью
управлять системой. При сокращении объемной информации размеры про­
граммного кода уменьшаются и система работает быстрее.
20
В четвертой главе приведены результаты экспериментальных исследо­
ваний по обработке детален с ударной нагрузкой и неоднородным припус­
ком.
При проведении эксперимента по обработке детали с ударной нагрузкой
производились контроль и регистрация мощности, расходуемой на обработ­
ку. Замер и регистрация мощности осуществлялись оборудованием и в соот­
ветствии с методикой, приведенной в работе [7]. При адекватном контроле
мощности, расходуемой на обработку, можно вычислить значение подачи,
мм/об:
S=M-U-l-rj-cos^-T"\
(17)
V С-ѵ"'-/"''-КК
где 7'—задаваемый период стойкости инструмента, мни; ц - КПД. двигателя
привода оборудования.
При проведении эксперимента осуществлялась проточка диаметра
420
с шероховатостью 7?„= 2,5.
Показания датчика тока снимались и записывались для режима чернового
и получистового точения, в процессе обработки из-за наличия дефектов на
обрабатываемой поверхности происходила поломка резца, эти изменения
также фиксировались датчиком тока. Обработка велась со следующими зна­
чениями параметров:
черновая — глубина резания от 3 до 2 мм, частота вращения шпинделя
станка от 19 об/мин, подача 0,2 мм/об;
получистовая — глубина резания от 2 до 1,5 мм, частота вращения шпин­
деля станка от 38 об/мин, подача 0,2 мм/об.
Обработка данных производится также на базе SiimiIink-Mon.emi, создан­
ной на основе рекомендаций, изложенных в [26]. Уже в процессе снятия
показаний процесса обработки были получены рекомендации, позволившие
установить режимы обработки, повышающие производительность процесса.
Обработка результатов данных, полученных в ходе эксперимента, позво­
лила получить номограмму для назначения оптимальных режимов обработки
(рис. 8). При экспериментальной обработке корпуса эксцентрика максималь­
ное отклонение экспериментальных данных от расчетных составляет 3%, что
вполне допустимо в условиях реального производства. Сравнение расчетных
и экспериментальных данных представлено в виде графиков, которые изобра­
жены на рис. 9. Линия (более светлая) полученных значений мощности реза­
ния постоянно отклоняется от прямой линии теоретических значений, но эти
отклонения весьма не значительны и находятся в пределах допустимой по­
грешности измерений. По результатам этой работы можно сделать вывод использование специальных приборов, контролирующих мощность резания,
позволяет значительно улучшить показатели процесса обработки, а реализация
подобного прибора при современном состоянии элементной базы не вызовет
затруднений.
21
Зависимость сирости резаиия от подачи и глубины
У 00
600
!>00
4 00
300
200
100
0 -і—-I
,<?
^1
$>
<У
О-
&
<У
О-
#
-<°
О-
<і-
<&
О-
Подача, мм/об
РИС. 8. Номограмма дпя назначения оптимальных режимов обработки
Мощность резания, кВт
— Реальные значения мощности, кВт
16 и 14,
& 12,
* Ю,
=-^
'
'
•
'
"
'
*""**" ""
С^"^*^
8 е
I
^
.
0
^^"
.
-
*
*
•
•
*
****^
^^~ѵ
0 -
20
25
30
35
40
45
50
Скорость, и/мин
Рис. 9. Зависимость мощности от скорости резания
55
СО
22
Анализ напряжений, возникающих при ударе, позволил получить сле­
дующие рекомендации, учитываемые при назначении режимов обработки
при ударно-ограничивающем резании:
1. Назначать технологические режимы обработки с учетом ударной на­
грузки за счёт снижения скорости резания.
2. Не применять резкое торможение шпинделя станка, предпочтитель­
но -- при обработке крупногабаритных деталей использовать дополнитель­
ные устройства, обеспечивающие плавное торможение.
3. Изменять вращение шпинделя на противоположное можно только
после его полной остановки, предпочтительно - обеспечить оборудование
устройством, контролирующим направление вращения, исключающее его
изменение без полной остановки.
При ударе припуск изменяется очень быстро, т.е. происходит скачок
мощности, что регистрируют измерительные приборы. Приборы не всегда
могут достоверно зарегистрировать кратковременные изменения мощности,
поэтому автором предложена модель идентификации удара (рис. 10).
АЦП
—&
В систему управле­
ния оборудованием
Устройство
отображении
«Э—
Анализатор
Рис. 10. Структура модуля идентификации удара
Сигнал от датчика ускорения (акселерометра) усиливается, а затем пре­
образовывается в цифровую форму, удобную для отображения или исполь­
зования для последующего анализа. Величина ускорения отображается на
специальном устройстве, и также поступает в специальный преобразователь,
генерирующий сигнал управления. Сигнал управления предназначен для
корректирования текущих параметров обработки, ограничения режимов,
аварийной остановки оборудования.
При обработке деталей с неоднородным припуском контроль мощности
выполнялся так же, как и при ударно-ограничивающем резании.
Результаты сравнения зависимости теоретической и экспериментальной
мощности резания от скорости при неоднородном припуске представлены на
рис. 11.
Основным результатом экспериментального исследования мощности ре-
23
зания при обработке детален с неравномерным но структуре материалом
припуска является подтверждение теоретически предсказанного уменьше­
ния мощности резания, возникающего в предсказанном диапазоне. Расхож­
дение экспериментальных и теоретических данных примерно на 10% объяс­
няется отклонениями в расчетах и точности произведенных измерений.
В наііденном диапазоне задаваемых режимов обработки происходит уве­
личение стойкости инструмента (рис. 12). По результатам исследования анало­
говой модели и экспериментальных исследований по обработке наплавленной
поверхности ролика тянуще-правильной машины разработано устройство дпя
вибрационной обработки на токарных станках [11,15], а на рис. 13 приведена
схема управления вибрациями режущего инструмента за счет изменения их
фазы.
Мощность розанип, кВт
і
5
1
I
7,60 7,40 ч
7,20
7,00 -|
6,ВО
6,00
6,40
6,20 -,
6,00 5,80 5.60
4-J-.-LJ7*-
**ч<
-\ .и
««««'«'Теоретическое значение
-1'»--** « Э к с п е р и м е н т а л ь н о * энач&иие
ч<?
Скорость
р е з а н и я , F.WM им
I
Рис. 11. Практические и теоретические результаты исследования мощности резания
Изменение
30,00
25,00
|
20,00
8
15,00
у
стойкости инструм о нта , м им
I
" f
I
""Ч"--^Z^~~V\
—^"І
—
Ь ю,оо
|
\
і
—~~,- - ^ .
5,00
L-
0,0 0
100
110
120
130
i
140
150
160
170
1S0
Скорость реэвныя, м / н и н
Рис. 12. Изменение периода стойкости инструмента
190
200
2'\
I
Деталь
Датчик
\ \ Исполнительное
устройство
ііз/
Инструмент
Устройство сравнения
Усишгкяь
Генератор
Запоминающее
устройство
Рис. 13. Схема управления вибрациями режущего инструмента
Устройство можно использовать в адаптивных системах управления, ва­
риант предлагаемой структуры управления представлен на рис.14.
гас
АЦП
It
УсгроіѴіг.о
контроля мощ­
ности
Датчик вибрации
(Акселерометр)
Устройство
сопряжения
ЦАП
Устройство для
виброрезашія
Рис. 14. Адаптивная схема управления оборудованием с устройством для
виброрсзання
25
В.ІІДТОЙ.ГДЙРС описано устройство для контроля погрешности формы де-
тали г. поперечном сечении. Схема устройства изображена на рис. 15. Устрой­
ство работает следующим образом. На измеряемой детали вращения 22 делают
радиальную метку, например, Б виде мапшта. На удобную поверхность, на­
пример на стойку или кронштейн, установленные вблизи измеряемой детали,
вне измерительного устройства устанавливают датчик количества оборотов 20,
так, чтобы метка пересекала линию измерения датчика при вращении тела.
Устройство устанавливают непосредственно около детали так, чтобы оси
опорных роликов были параллельны оси вращения измеряемой дегалн. С
помощью устройства 12 поперечного перемещения подводят корпус / к из­
меряемой детали. При этом должен быть обеспечен контакт роликов 4 и 5,
установленных в основании 3 каждой из опор.?, с измеряемой поверхностью.
Кроме того, в контакт' с измеряемой поверхностью должен пойти измери­
тельный диск / 7. Момент контакта определяется но наличию сигналов с дат­
чиков угловых перемещений 7, индуктивных датчиков б и датчика линейных
перемещений 19. В качестве крупногабаритной детали, на которой проводят­
ся измерения, может быть, например, бандаж цементной печи. Измерения
проводятся в процессе технологического вращения печи без ее остановки.
Первый этан измерений проводится в определенном сечении.
Рис. 15. Устройство для измерения геометрических параметров формы
крупногабаритных деталей вращения
26
При вращении детали по сигналу с датчика пути 18 измерительные дат­
чики б фиксируют расстояние до измеряемой поверхности. Датчики 18 и 6
электрически связаны через блок вычислений и хранения информации 21.
Датчик 19 фиксирует перемещение рычага 16 относительно корпуса /. Дат­
чики 7 фиксируют углы поворота опор 2 относительно корпуса /. Значения
углов поворота поступают в блок вычислений и хранения информации 21.
Измерительный датчик 9 фиксирует угол поворота корпуса / относительно
штанги 8, что позволяет отследить положение центра сечения измеряемой
детали. "Датчик 11 фиксирует перемещение штанги Я относительно рамы 10,
что позволяет определять радиальное биение контура детали в измеряемом
сечении. Измерения к одном сечешш повторяются с шагом, задаваемым дат­
чиком пути /5, до совершения деталью одного полного оборота, который
определяется датчиком количества оборотов 20. После измерения в заданном
сечении при помощи механизма поперечного перемещения 12 устройство
отводят от измеряемой поверхности и при помощи устройства продольного
перемещения 13 перемещают устройство для измерения в следующее сече­
ние. Процесс измерения в следующем сечении аналогичен описанному вы­
ше. Действия повторяются до тех пор, пока не будет измерено каждое сече­
ние с заданным шагом. По показаниям датчиков б, 7. 19 рассчитываются ко­
ординаты трех точек каждого сечения и по этим координатам определяются
радиусы аппроксимирующих дуг. Показания датчика 9 позволяют опреде­
лить поведение центра каждого сечения детали. По показаниям датчика 11
определяют радиальное биение контура измеряемой детали. Показания дат­
чиков поступают в блок вычислений п храпения информации, который мо­
жет быть сопряжен с ЭВМ. По полученным данным может быть сгенериро­
вана цифровая объемная трехмерная модель тела вращения, которая в даль­
нейшем может использоваться дня математического моделирования поведе­
ния этого тела в процессе вращения.
Для обработки поверхности крупногабаритной детали (например, техно­
логического барабана) настройку станочного модуля на каждый проход
предложено производить по схеме, приведенной на рис. 16. На рис. 16 пока­
заны: 1)„ — расстояние от настроечной базы до образующеіі с наибольшим
отклонением от крутости; Л„ - размер настройки вылета резца, определяю­
щий глубину резания; t - задаваемая на проход глубина резания; иптіи —
минимальное значение из радиусов аппроксимирующих дуг в выбранном
сечении; г — радиус опорного ролика; L - расстояние между осями опорных
роликов.
Настроечный размер (вылет резца), мм, определяется по формуле
27
Глубина резания назначается на проход в соответствии с коэффициентом
А'Лч,, который представляет собой отношение части погрешности формы,
уменьшаемой на каждом проходе, к величине неходкой погрешности.
Л
'
А-Л Ч11 _ І -А- ІЧ(1 . І , (19)
$'•;••
j.
*"
%У
'ч
"
"Si/
'•
//?
~
'"
~*if \
где tt - глубина резашш на выпол ••
няемом проходе; д іл- отклонение
от круглостн, полученное после
предыдущего прохода (или исходиое при выполнении первого прохода); л- значение козффнцн-
, ^ о
\ ~;~TT : : '" r j/ fl \
\
у *•; 'v
-?!І
у
/Ч
'^—-' I/?
••---/
/
__
ema относительного отклонения от
круглости после предыдущего
прохода (или исходное при выполпенни первого прохода).
Для определения значения ісоРис.16Рж;чеіная«емаддаиагг(ки:іаі
зффицисята круглости выполнено
наложении шкярумягга
моделирование
многопроходной
обработки, при котором значение
глубины резания на каждый про­
ход корректировалось в соответствии с коэффициентом кАг , полученным в
результате измерения профиля. Результат моделирования показывает, что
для устранения исходной погрешности формы до требуемых значений круг­
лости необходимо меньшее число проходов по сравнению с традиционной
технологией (рис. 17). Анализ состояния современной элементной базы по­
казал, что использование акселерометра в качестве датчика параметров виб­
раций позволяет создать эффективный прибор для контроля вибраций в тех­
нологической системе. А конструкция акселерометра, тражагощая проекцию
силы тяжести на одну из осей, позволяет измерять угол изгиба державки рез­
ца. На основе акселерометра был разработан прибор для регистрации вибра­
ций в технологической системе, структурная схема которого изображена на
рис. 18, а. Особенностью этого прибора является использование в качестве
вычислительного и регистрирующего элемента карманного персонального
компьютера, что позволяет значительно уменьшить габариты контрольнорегистрирующего комплекса н уменьшить затраты на его практическую реа­
лизацию. На рис. 18,6 приведено изображение КПК с загруженной програм­
мой регистрации вибраций.
28
Прибор был использован для определения влияния назначаемых техноло­
гических параметров обработки на величину вибраций. При проведении из­
мерений и регистрации виброускорений данные были сохранены и соответ­
ствующих файлах для последующей обработки. Отклонение среднего зна­
чения виброускоренші в одну из сторон означает изменение угла прогиба
державки резца. Увеличение среднего отклонения в отрицательную сторону
означает увеличение прогиба державки резца под действием сил резания.
12
10
-сущестиукщ.ря технология
\
•с корректировкой глубины
резания
АѴ,
«>
а.
4
^J
О
с
^
2т
г^
Рис. 17. Изменение погрешности формы при многопроходной обработке
l ) 4.-™MR";VH
- t№\ifW^rs»ftitr"Vf^h*
"'"•5
Гибкий кабель
Акшкромеір
^А-
Гибкий кабель
КПК
ЛЦН
і
Преобразователь COM
порта
Рис. 18. Структурная схема контрольно-регистрирующего прибора (а) и его
реализация в КПК (б)
Подробное описание прибора для контроля и регистрации параметров
вибраций в технологической системе, а также методики обработки получен­
ных результатов, приведено в монографии автора [1].
29
Реализация технологии с использованием активного контроля представ­
лена следующим образом:
1. Установка, наладка и подключение технологических модулей.
2. Выполнение измерений параметров формы (модуль контроля).
3. Определение припуска и параметров обработки.
4. Обработка с активным контролем (одновременная работа модуля кон­
троля и модуля обработки):
4.1. Выполнение одного прохода восстановительной обработки.
4.2. Измерение получаемых после прохода параметров формы.
5. Корректировка параметров обработки п выполнение обработки по п. 4.
6. Окончание обработки при обеспечении заданной точности.
В шестой глава дана оценка методики восстановительной обработки
крупногабаритной детали с использованием рекомендаций, полученных по
результатам теоретических и экспериментальных исследований.
Дчя реализации автоматической или автоматизированной системы управ­
ления обработкой крупногабаритных деталей технологического оборудова­
ния без их демонтажа следует предварительно определить режимы обработ­
ки согласно предлагаемой методике:
1. Производится замер поверхности обрабатываемой детали и определя­
ется слой снимаемого припуска, мм, но формуле
c\=(Dm^-Dnm)/2+l,
(20)
где /J>max- максимальный диаметр отверстия детали, мм; Д„га - минималь­
ный диаметр детали, мм.
2. Определяется частота вращения обрабатываемой детали, а затем со­
гласно замеренному диаметру вычисляется скорость резания при механиче­
ской обработке.
3. По данным производителя оборудования для мощности, затрачивае­
мой на перемещения суппорта и преодоления сил трения, и паспортной
мощности электродвигателя механизма подачи станка определяется макси­
мально допустимая мощность резания.
4. Из полученных в ходе исследования номограмм выбираются наибо­
лее подходящие по мощности резания, и в зависимости от выбранной скоро­
сти резания и требуемой глубины выбирается соответствующая подача и
производится обработка поверхности.
5. Учитывая, что при производстве оптимизационных расчетов в каче­
стве одного из условий ограничения принимался период стойкости, то при
обработке детали в несколько проходов требуется использовать по одному
инструменту на каждый проход.
6. Для получения требуемой чистоты поверхности детали последний
проход выполняется как чистовой с максимально возможной подачей при
относительно небольшой глубине резания.
30
7. По окончании обработки производится замер обработанной поверхно­
сти детали, дается заключение о пригодности к эксплуатации.
Экономические расчёты дают возможность сделать заключение о дости­
жении поставленной цели исследований - повышения эффективности обра­
ботки крупногабаритных деталей путём идентификации технологических
параметров. В табл. 1 и 2 дан сравнительный анализ замены детали на новую
и её восстановления с использованием предлагаемых технологий
Таблица 1
Оценка себестоимости вариантов ремонта корпусе эксцентрика
Наименование затрат
№ п/и.
1 Стоимость детали
2 Транспортные расходы
Стоимость ремонта
._£_
Итого
Восстановление
детали
0
0
78 694
78 694
Вариант
Монтаж новой дета­
ли
125000
1050
17 441
143 491
Таблица 2
Оценка себестоимости вариантов ремонта ролпсоі
тянуще-правильной мзішшм
Ks п/и.
Наименование затрат
1
Стоимость детали
Транспортные расходы
2
Стоимость (ремонта) уста­
новки
3
Итого
Вариант
Восстановление
Монтаж новой дета­
детали
ли
1
0
135000
0
1100
93 193
28 485
93 193
164 585
Экономия средств при восстановлении одного корпуса подшипника экс­
центрика составляет - 64 797 руб. (в 2005 г.); одного ролика тянущеправильной машины - 71 392 руб. (в 2007 г.).
31
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
1. В работе представлены теоретические и практические результаты ис­
следования, являющиеся основой технических и технологически решений,
позволяющих повысить эффективность автоматизированной восстанови­
тельной обработіш крупногабаритных деталей и вносящие значительный
вклад в развитие экономики страны и повышение сё обороноспособности.
2. Установлены связи в технологической системе, отражающие влияние
неоднородности и неравномерности припуска обрабатываемой поверхности
на мощность, потребляемую приводом оборудования, и уровень вибраций,
позволяющие реализовать подсистему идентификации основных технологи­
ческих параметров обработки и контроль формы детали в поперечном сече­
нии, а также прогнозировать состояние технологической системы восстано­
вительной механической обработки.
3. Автоматизированная восстановительная обработка крупногабаритных
деталей с неоднородным и неравномерным припуском, ударноограничивающим резанием, выполняется по модели, учитывающей стохас­
тическое изменение мощности резания, н выявленные- закономерности изно­
са режущего инструмента, что позволяет повысить эффективность техноло­
гического процесса.
4. Алгоритм управлениятехнологическимпроцессом восстановительной
механической обработкой крупногабаритных деталей реализует метод иден­
тификации параметров обработки, учитывающий потребление мощности
приводами оборз'дования, глубину резания, неоднородность и неравномер­
ность припуска обрабатываемой поверхности. В алгоритме реализуется ме­
тодика оценки износа режущего инструмента, основанная на автоматическом
контроле мощности и глубины резания с возможностью прогнозирования его
величины.
5. Подсистема идентификации технологических параметров восстанови­
тельной обработки крупногабаритных деталей учитывает правило, требую­
щее для идентификации параметра не менее двух входных неременных. При
управлении технологическим модулем обработки подсистема позволяет
прогаознровагъ состояние технологической системы и оценивать эффектив­
ность обработки.
6. Программное обеспечение для контроля и идентификации технологи­
ческих параметров обработки, разработанное в ходе практической реализа­
ции результатов научных исследований, основывается на полученных моде­
лях и алгоритмах управления технологическим процессом. Алгоритмы реа­
лизованы в виде специального программного обеспечения для компьютеров
32
управления технологической системой и контроллеров управления устройст­
вами регистрации технологических параметров и управления колебаниями
режущего инструмента.
7. По результатам теоретических и практических исследований разрабо­
таны и запатентованы устройства и приборы, яяляющиеся частью подсисте­
мы идентификации технологических параметров обработки и предназначен­
ные для контроля мощности резания, уровня и частоты вибраций в техноло­
гической системе, глубины резания, формы детали в поперечном сечении.
Алгоритмы управления оборудованием реализованы в запатентованных ав­
тономном нестационарном станочном модуле и устройствах для виброрезання.
8. Внедрение разработанных методик идентификации параметров тех­
нологических процессов обработки крупногабаритных деталей позволило
снизить себестоимость механической обработки ка ОАО «ОЭМК» на 15% и
энергопотребление фрезерования титановых сплавов фрезами ОАО «СКИФ
- М» на 14%. Опытная обработка заготовок крупногабаритных деталей ме­
таллургического оборудования показала возможность использования мето­
дик, основанных на автоматизированном контроле параметров технологиче­
ского процесса, не только при восстановлении, но и при получении крупно­
габаритных деталей технологического оборудования. Результаты научных
исследований внедрены в учебный процесс и используются в курсах:
«Управление системами и процессами в машиностроении» и «Системы ав­
томатизированного проектирования технологических процессов».
Основные положения диссертации опубликованы в следующих
работах:
Монография
1. Чепчуров, М.С. Контроль и регистрация параметров механической обра­
ботки крупногабаритных деталей [Текст]:моногр. /М.С. Чепчуров. - Белгород:
БГТУ, 2008. --232 с.
Публикации в центральных изданиях, включенных п перечень
периодических изданий ВАК РФ
2. Чепчуров, М.С Контроль и регистрация мощности резания при обра­
ботке крупногабаритных деталей [Текст] / М.С. Чепчуров // Технология ма­
шиностроения. -2008. - № 3. - С. 13-15.
3. Поготін, А. А. Моделирование параметров технологического процесса обра­
ботки с использованием метода Монте-Карло [Текст] / М. С. Чепчуров, А.А. Погонин // Горный информационно-аналитический бюллетень; Московский государ­
ственныйгорныйуниверситет. - 2003. - № 2. - С. 17 — 18.
33
4. ІТогонин, А.А. О спецификации на нестационарный станочный модуль
[Текст] / А. А. Погоним, М.С. Чепчуров // Горный информационноаналитический бюллетень. - 2004. - № 3. - С. 83 - 86.
5. Чепчуров, М.С. Использование АЦП для регистрации и обработки
аналогового сигнала в ПК [Текст] // М.С. Чепчуров // Ремонт, восстановле­
ние, модернизация. - 2008. - №5. - С.8 - 10.
6. Чепчуров, М.С. Модернизация токарного автомата на базе персонального
компьютера [Текст] / М. С. Чепчуров, А. Г. Схиргладзе, А.В. Жила // Ремонт, вос­
становление и модернизация.- 2007. -№11.- С. 7 - 9 .
7. Погонпн, А.А. Автономный нестационарный станочный модуль. [Текст] /
А.А. Погонпн, М.С. Чепчуров // СТИН. - 2002. - №10. - С. 26 - 28.
8. Чепчуров, М.С. Технология ремонта крупногабаритных корпусных
деталей металлургического оборудования [Текст] / М.С.Чепчуров, А.А. По­
гонпн, С. В. Старостин, А. Г. Схнртладзе // Ремонт, восстановление, модер­
низация. - 2005. - № 2. - С.20 - 22.
9. Погонпн, А.А. Снятие характеристик процесса механической обработки
крупногабаритных деталей [Текст] / А.А. Погонпн, М.С. Чепчуров, С. В. Ста­
ростин // Тяжелое машиностроение. - 2005. — № 3 — С. 15 - 16.
10. Чепчуров, М.С. Измерение и регистрация тока в.цепи привода
оборудования [Текст] / М.С. Чепчуров // Ремонт, восстановление, модерни­
зация. -2008. - № 9. - С.46 - 48
11. Погонпн, А.А. Выбор параметров управления технологическим про­
цессом при обработке нестационарным станочным модулем [Текст]/ А.А.
Погонпн, М.С. Чепчуров // Горный информационно-аналитический бюлле­
тень. - 2003. --№ 2. - С. 21 - 23.
12. Чепчуров. М.С. Модернизация управления приводом фрезерного
станка с ЧПУ при использовании ПК [Текст]/ М.С. Чепчуров// Ремонт, восста­
новление, модернизация. - 2008. -№ 7. - С.13 - 15.
13. Чепчуров, М.С. Обработка деталей с неравномерным по структуре
материалом припуска [Текст]/ М.С. Чепчуров // Технология машинострое­
ния. - 2 0 0 8 . - № 1 0 . - С . 12 - 14.
14. Погони» А.А. Нестационарный станочный модуль с адаптивной сис­
темой управления /А.А. Погонпн, М.С. Чепчуров, А.В. Хуртасешсо// Известия
ВУЗов, серия «Строительство». -2008. -№ 2. -С.23-28.
15. Чепчуров М. С. Способ контроля вибраций в технологических сис­
темах [Текст]/ М.С. Чепчуров, А. Н. Феофанов // Автоматизация в промыш­
ленности. - 2009. -Х» 4. - С. 13-14.
Авторские свидетельства и патенты
16. Свидетельство на полезную модель № 35265. Автономный нестацио­
нарный станочный модуль для обработки крупногабаритных изделий
[Текст]/ А.А. Погонпн, М.С. Чепчуров, А.В. Хуртасешсо: Бюл. № 6,2004. - 7 с.
17. Пат. № 40234 РФ. Устройство для вибрационной обработки крупно-
34
габаритных деталей/ А.А Погонин., М.С. Чепчуров, С.В.Старостин. Опубл.
Бюл. № 22,2005. - 5 с.
18. Пат. № 66511 РФ. Устройство для измерения геометрических парметров формы крупногабаритных детален вращения [Текст] / А.А. Пого­
няй, М.С. Чепчуров, А.В. Хуртасенко. Бюл. № 25,2007. - 7 с.
19. Пат. К» 49981 РФ. Устройство для контроля шероховатости отвер­
стий малого диаметра [Текст] / А.А.Погонин, М,С.Чепчуров, Д.В. Челядинов. Бюл. №> 22, 2005. - 5 с.
20. Пат. № 61173 РФ .Устройство для вибрационной обработки на токар­
ных станках [Текст] / А.А.Погогнин, М.С Чепчуров., А.А. Глуховченко. Бюл.
№21, 2007.-7 с.
21. Пат. № 71423 РФ. Датчик положения рабочих органов [Текст] /
А.А, Погонин, М.С. Чепчуров, А.Д. Короп. Бюл. N° 7, 200S. - 8с.
22. Пат. № 71431 РФ. Устройство измерения мощности резания [Текст] /
Т.А. Дуюн, М.С. Чепчуров, А.В. Грннёк. Бюл. № 7, 2008. - 9 с.
Публикации в других изданиях, материалы конференций
23. Чепчуров, М.С АСУ контроля качества деталей автооборудования
[Текст] / М.С. Чепчуров, Д.В. Челядинов // Вестник Тамбовского государст­
венного университета.-2007.-№ 1 - С.234-236.
24. Чепчуров, М. С. Анализ и задачи оптимизации параметров конструк­
ций мобильных станков [Текст] / М.С. Чепчуров, А.В. Хуртасенко, А.А. Мак­
симов// Вестник БГТУ им. В.Г. Шухова. - 2005. -№ 11. -С. 349-352.
25. Чепчуров, М.С. Контроль технологического процесса механической
обработан деталей в условиях ремонтного производства [Текст] / Техника и
технология монтажа машин (ТТММ1 04): материалы междуиар. коиф., Поль­
ша, -2004. -С.14-15.
26. Pogonin, А.А. Identyfikacja parametrow procesu technologicznego przy
obrobce niestacjonamymi modulami obrabiarkovvj'ini / A.A. Pogonin,
A.W.Churtasenko, M.S. Czepczurow // Modulovve techologie i konstrukeje w budowie maszyn: materialy IV Miedzynarodowej Konferencji Naukowo-Techicznej. Rzeszow; Oficyna wydawnicza Politechniki Rzeszowskej. -2004. - Z. 67-70.
27. Чепчуров М.С. Моделирование процесса обработки нестационарными
станочными модулями [Текст] /М.С. Чепчуров, А.А. Погонин. Моделирова­
ние как инструмент решения технических и гуманитарных проблем, сб. докл.
междунар. конф.-Таганрог: ТГРУ, - 2002. -С. 59 - 60.
28. Погонин, А.А. Автоматизация расчетов при определении предельно
допустимого сечения державки резца в процессе обработки крупногабаритных
изделий нестационарными станочными модулями [Текст] /А. А. Погонин,
М.С. Чепчуров. Экспресс-обзор. Промышленность строительных материалов.
Сер. 1. Цементная промышленность. - 2002. - Вып.4. -С. 2 1 - 2 5 . ISSN - 02341638.
29. Погонин, А. А. Исследование процессаточениякрупногабаритных изде­
лий при нестационарной обработке [Текст] / А. А. Погонин, М.С. Чепчуров //
35
Экспресс-обзор. Промышленность сіроительных материалов. Сер.1. Цемент­
ная промышленность. - 2002.- Вып.4. -С. 14-21. ISSN - 0234-1638.
30. Погоним, А.А. Автономный нестационарный модуль иа базе УВС - 01
[Текст] / А.А. Погонин, М.С, Чепчуров, А.В. Хуртасенко и др. // Энергосбере­
гающие технологические комплексы и оборудование для производства строи­
тельных материалов:, материалы межвузовского сборника статей. - Белгород:
Изд-во БГТУ им. В.Г. Шухова, -2003.
31. Погонин, А.А. Гибкая мобильная технология восстановления гео­
метрической точности крупногабаритных деталей [Текст] / А.А. Погонин,
М.С. Чепчуров, А.В. Хуртасенко и др. Вестник БГТУ им. В.Г. Шухова»: мате­
риалы Международного конгресса «Современные технологии в промышлен­
ности строительных материалов и строГшндустріш», посвященного 150-летию
В.Г. Шухова. - Белгород. -2003. ~№7. -С. 73-72.
32. Погонин, А.А. О формате данных САПР ТП обработки крупногаба­
ритных деталей [Текст] / А.А. Погонин, М.С. Чепчуров, Е.Ю. Кудриков //
Прогрессивные направления развития машино-прнборо-строительных отрас­
лей и транспорта:, материалы международной научно-технической конферен­
ции студентов, аспирантов и молодых ученых, г. Севастополь: 17-20 мая. Севастополь: Изд-во СевНТУ. -2004.2004. -Т 1. - С. 40 - 42.
33. Чепчуров, М.С. Анализ и задачи оптимизации параметров конструк­
ций мобильных станков [Текст] / М.С. Чепчуров, А.В. Хуртасенко, А.А. Мак­
симов. Вестник БГТУ им. В.Г. Шухова. - 2005. - № 11. -С. 349-352.
34. Чепчуров, М.С. Вопросы расчета параметров базовых элементов мо­
бильных станочных модулей/ М.С. Чепчуров, А.А. Погонин, А.В. Хуртасенко
// Вестник БГТУ им. В.Г. Шухова, - 2005. - № 11. - С. 380-382.
35. Чепчуров, М.С. Определение величины контактных напряжений
при ударном взаимодействии детали режущей части инструмента [Текст] /
М.С. Чепчуров, А.А. Погонин, СВ. Старостин // Вестник БГТУ им. В.Г. Шу­
хова. - 2005. -№ 11. - С. 385-338.
36. Чепчуров, М.С. О деформациях бандажей цементных печей при их
механической обработке [Текст] / М.С. Чепчуров, В.Я. Дуганов, В.В. Се­
ров// Вестник БГТУ им. В.Г. Шухова. -2005. - № 11. - С. 309-313.
37. Дуюн, Т.А. Условия отсутствия автоколебаний при обработке кол­
лекторов машин постоянного тока [Текст] / Т.А. Дуюн, М.С. Чепчуров,
А.В. Гринек// Сб. докл. междунар. науч.-практич. конф. -Белгород: Изд-во
БГТУ им. В,Г. Шухова.-2007. -Ч9.-С.112-115.
38. Чепчуров, М.С. Бесконтактный метод контроля качества поверхности
детали и его реализация [Текст] / М.С. Чепчуров, Д.А. Коломин.// сб.докл. 7-й
междунар. конф. Авиация и космонавтика, - М.: Изд-во МАИ, 2008. -С.31-27.
Чеичуров Михаил Сергеевич
ПОВЫШЕНИЕ ЭФФЕКТИВНОСГИ ВОССТАНОВИТЕЛЬНОЙ
МЕХАНИЧЕСКОЙ ОБРАБОТКИ КРУПНОГАБАРИТНЫХ
ДЕТАЛЕЙ ПУТЕМ ИДЕНТИФИКАЦИИ
ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
Автореферат
Подписано в печать /g, &?. с$
Усл. п. л. 2,0.
Формат 60x84/16
Тираж 150 экз.
Заказ Ъ&3~?0
Отпечатано в Белгородскомгосударственномтехнологическом университете
имени ВТ. Шухова
308012, г. Белгород, ул. Костюкова, 46