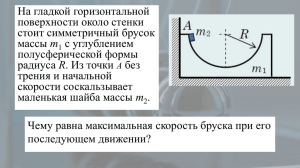
МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Тверской государственный технический университет» (ТвГТУ) Кафедра “Программного обеспечения” Лабораторная работа №16-20 по дисциплине «Моделирование систем» Тема: «Движение шарика, присоединенного к пружине» Выполнила: студентка группы ПИН 20.06 Кирсанова Вера Александровна Проверил: Калабин Александр Леонидович Тверь 2023 Цель работы Разработать имитационную модель согласно варианту: Вариант 4 Движение шарика, присоединенного к пружине. Выполнение работы Если речь идет о задачах динамики, то можно использовать следующую схему — сначала связать с помощью закона Ньютона проекции ускорения тела с проекциями действующих на него сил, а затем, исходя из тех или иных соображений, вычислить эти силы как функции координат, получив замкнутую модель. Продемонстрируем этот подход на примере модели движения шарика, присоединенного к пружине, с жестко закрепленным концом Рис. 1 – модель шарика, присоединенный к пружине Пусть r — координата шарика вдоль оси пружины, лежащей на горизонтальной плоскости, и направление движения шарика совпадает с ее осью. Тогда по второму закону динамики 𝐹 = 𝑚𝑎 = 𝑚 𝑑2 𝑟 𝑑𝑡 2 , где m — масса шарика, а — его ускорение. Будем считать плоскость идеально гладкой (т. е. движение происходит без трения), пренебрежем также сопротивлением воздуха и примем во внимание то, что вес шарика уравновешивается реакцией плоскости. Единственная сила, действующая на шарик в направлении оси г, очевидно, сила упругости пружины. Определим ее, используя закон Гука, гласящий, что для растяжения (сжатия) пружины необходимо приложить силу 𝐹 = −𝑘𝑟 , где коэффициент k > 0 характеризует упругие свойства пружины, а r — величину ее растяжения или сжатия относительно нейтрального, ненагруженного положения r = 0. Уравнение движения шарика принимает вид (уравнение элементарного осциллятора) 𝑚 𝑑2 𝑟 𝑑𝑡 2 = −𝑘𝑟, t > 0. Оно описывает его гармонические колебания и имеет общее решение 𝑟 = 𝐴𝑠𝑖𝑛𝜔𝑡 + 𝐵𝑐𝑜𝑠𝜔𝑡, 𝑘 где 𝜔 = √( ) — собственная частота колебаний системы «пружина— шарик». 𝑚 Значения А и В легко определяются из начального состояния объекта, т. е. через величины r (t = 0) = r0 и v (t = 0) = v0 (v(t) — скорость шарика), причем r(t) ≡ 0 при r0 = v0 = 0. Коэффициент A равен начальному смещению груза от положения равновесия r0, а коэффициент B определяется из начальной скорости груза v 0 и угловой частоты колебаний 𝜔, как B = v0/𝜔 . Код программы GPSS: Rt A_ B_ W_ K_ M_ T_ Ro Vo EQU EQU EQU EQU EQU EQU EQU EQU EQU 1 0 0 0 10 1 0.1 0.1 0.1 Rt INTEGRATE (Koleb()) GENERATE 0.03 TERMINATE 1 START 1 PROCEDURE Koleb() BEGIN A_ = Ro; W_ = SQR(K_ / M_); B_ = Vo / W_; Rt = A_ # SIN(W_ # T_) + B_ # COS(W_ # T_); RETURN Rt; END; Результат работы программы: GPSS World Simulation Report - lab16_20.56.1 Wednesday, May 10, 2023 18:47:44 START TIME 0.000 END TIME 0.030 NAME A_ B_ KOLEB K_ M_ RO RT T_ VO W_ LABEL FEC XN 2 FACILITIES 0 STORAGES 0 VALUE 0.100 0.032 10000.000 10.000 1.000 0.100 0.061 0.100 0.100 3.162 LOC 1 2 PRI 0 BLOCKS 2 BLOCK TYPE GENERATE TERMINATE BDT 0.060 ASSEM 2 ENTRY COUNT CURRENT COUNT RETRY 1 0 0 1 0 0 CURRENT 0 NEXT 1 PARAMETER VALUE Это означает, что при массе шара m = 1кг, начальном отклонении r0 = 0,1м, начальной скорости 0,1 м/с, и коэффициенте жесткости k = 10Н/м, времени t = 0,1с , конечное отклонение шарика r(t) будет равно 0,061м. График колебаний шарика на пружине: График отклонения шарика от времени t при разных коэф-ах жесткости k 0,12 k = 10Н/м k = 20Н/м 0,09 Отклонение r, м 0,06 0,03 0 -0,03 0 1 2 3 4 5 -0,06 -0,09 -0,12 Время, с 0,15 График отклонения шарика от времени t при разной начальной скорости v0 v0 = 0,1м/с 0,12 v0 = 0,3м/с Отклонение r, м 0,09 0,06 0,03 0 -0,03 0 1 2 3 -0,06 -0,09 -0,12 -0,15 Время, с 4 5 0,15 График отклонения шарика от времени t при разной массе m m = 1кг 0,12 m = 2кг Отклонение r, м 0,09 0,06 0,03 0 -0,03 0 1 2 3 4 5 -0,06 -0,09 -0,12 -0,15 Время, с Вывод: В ходе работы была разработана имитационная модель «движение шарика, присоединенного к пружине» на GPSS. Был проведен анализ зависимости различных коэффициентов на отклонения шарика во время колебаний. Можно сделать следующие выводы: 1) При увеличении коэффициента жесткости k растет частота колебаний шарика, амплитуда колебаний остается неизменной; 2) При увеличении начальной скорости колебаний растет амплитуда, а также увеличивается частота колебаний; 3) При увеличении массы шарика падает частота колебаний шарика, амплитуда колебаний остается неизменной.