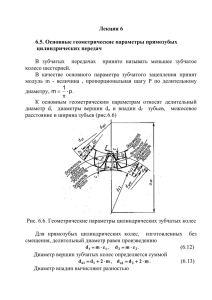
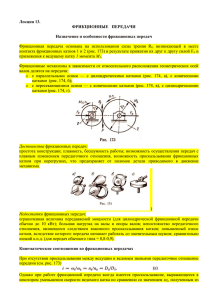
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» С.В. ЧЕРЕНКОВА, М.А. ИВАНОВА, У.А. ПАЗИЛОВА ДЕТАЛИ МАШИН И ОСНОВЫ КОНСТРУИРОВАНИЯ Механические передачи Утверждено Советом университета в качестве учебного пособия Санкт-Петербург 2017 УДК 621.833.3 ББК 34.443 Ч46 Рецензенты: кандидат технических наук А.А. Георгиев; кандидат технических наук В.И. Рыбаков Черенкова С.В., Иванова М.А., Пазилова У.А. Ч46 Детали машин и основы конструирования. Механические передачи: учеб. пособие /С.В. Черенкова, М.А. Иванова, У.А. Пазилова; СПбГМТУ. – СПб., 2017. – 180 с. Учебное пособие является первой частью планируемой серии пособий по дисциплине «Детали машин и основы конструирования». В пособии использован модульный принцип построения курса: в каждом модуле в лаконичной форме излагается теоретический материал по заявленной теме, приводятся примеры решения типовых задач и тест для проверки уровня полученных знаний. Настоящее пособие включает в себя 11 модулей и соответствует дидактическим единицам «Основы проектирования» и «Передачи и корпусные детали». Пособие предназначено для студентов технических специальностей дневной, вечерней и заочной форм обучения при изучении указанной дисциплины. УДК 621.833.3 ББК 34.443 СПбГМТУ, 2017 2 МОДУЛЬ 1 ВВЕДЕНИЕ «Детали машин и основы конструирования» – это первая из расчетно-конструкторских дисциплин, в которой изучают основы проектирования машин и механизмов. Проектирование и конструирование – это процессы создания изделия (машины или механизма) в документах, к которым относятся схемы, расчеты, пояснительные записки, чертежи, спецификации, инструкции по эксплуатации и т.п. Под конструированием понимают определение формы, размеров и выбор материалов, из которых состоит проектируемое изделие. Под проектированием понимают создание всего комплекса технической документации. Стадии разработки проектно-конструкторской документации: – техническое предложение, которое разрабатывают в результате анализа технического задания заказчика и различных вариантов возможных решений изделия; – эскизный проект – совокупность конструкторских документов, которые содержат принципиальные конструктивные решения, дающие общее представление об устройстве и принципе работы изделия; – технический проект – совокупность конструкторских документов, которые содержат окончательные технические решения; – рабочая конструкторская документация (чертежи деталей, спецификации и т.п.). 3 Тема 1. ОБЩИЕ ВОПРОСЫ РАСЧЕТА И КОНСТРУИРОВАНИЯ ДЕТАЛЕЙ МАШИН 1.1. Классификация машин по функциональному назначению Машина – это устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. Если указанные преобразования происходят без непосредственного участия человека, то это машина-автомат. В зависимости от основного назначения различают энергетические, технологические, транспортные и информационные машины. Энергетические машины предназначены для преобразования любого вида энергии в механическую и наоборот (например, электродвигатели, двигатели внутреннего сгорания, турбины, паровые машины). Технологические машины изменяют размеры, форму, свойства или состояния материалов (например, металлообрабатывающие станки, упаковочные машины). В транспортных машинах под материалом понимают перемещаемый предмет (например, подъемники, краны, транспортеры, автомобили). Информационные машины предназначены для получения и преобразования информации (например, механические счетные устройства). Большинство современных машин создают по схеме (рис. 1.1): двигатель (М) – передаточный механизм (ПМ) – исполнительный механизм (ИМ). М ПМ ИМ Рис. 1.1. Схема машины 4 Двигатель приводит машину в движение (например, электродвигатель). Исполнительный механизм производит движение, для осуществления которого предназначена машина. Например, схват манипулятора – это исполнительный механизм робота, который может удерживать инструмент (на рис. 1.2 показан рычажный захват). Передаточный механизм служит для преобразования и передачи механического движения от двигателя к исполнительному механизму. Например, на рис. 1.3 показан манипулятор, в основе которого шарнирно-рычажный механизм. Рис. 1.2. Схема рычажного захвата Рис. 1.3. Манипулятор 1.2. Основные виды передаточных механизмов Передаточные механизмы подразделяют на передачи вращения и механизмы возвратно-поступательного и колебательного движения. 1.2.1. Передачи вращения Рассмотрим передаточные механизмы, предназначенные для преобразования параметров вращательного движения: изменения скорости и направления движения. Такие механизмы называют передачами вращения, или механическими передачами. По принципу работы передачи подразделяют на: передачи зацеплением с непосредственным контактом (зубчатые и червячные) и с гибкой связью (цепные, зубчато-ременные); 5 передачи трением с непосредственным контактом поверхностей (фрикционные) и с гибкой связью (ременные). Основными кинематическими характеристиками передач вращения являются угловые скорости 1 , 2 . Отношение угловых скоростей ведущего звена к ведомому1 называется передаточным отношением: i12 1 или i21 2 . 2 1 (1.1) Зубчатая передача. В качестве примера на рис. 1.4 приведена цилиндрическая зубчатая передача, в состав которой входят два зубчатых колеса 1 и 2, которые установлены на валы 3 и 4. На рис. 1.4, в показана кинематическая схема зубчатой передачи. а б в Рис. 1.4. Зубчатая передача Передача вращения осуществляется давлением зуба одного колеса на зуб другого. Колесо 1, число зубьев которого меньше, называется шестерней. Если вращение передается зубчатой передачей между параллельными осями (см. рис. 1.4), то передаточное отношение (1.2) i12 1 или i21 2 ; 2 1 знак «+» означает, что передача не изменяет направление вращения; знак «–» означает, что передача изменяет направление враще1 Ведущим (входным) называют звено, связанное с двигателем, которому двигатель сообщает движение. Ведомым (выходным) называют звено, совершающее движение, для выполнения которого предназначен механизм. 6 ния на противоположное. Зубчатая передача, показанная на рис. 1.4, называется передачей внешнего зацепления. Она изменяет направление вращения на противоположное, поэтому i12 0, i21 0 . Пусть угловая скорость шестерни 1 (см. рис. 1.4) равна 1 [ c 1 ], а зубчатое колесо 2 вращается с угловой скоростью 2 [ c 1 ]. Тогда передаточное отношение этой зубчатой передачи i12 1 2 или i21 . 2 1 (1.3) Если известны частоты вращения n1 и n2 (см. рис.1.4, а) валов 3 и 4 (частота вращения вала обычно измеряется в количестве оборотов, которое вал совершает за одну минуту, об/мин, или мин–1), то, учитывая соотношение πn πn , (1.4) 60 30 получим передаточное отношение в виде: i12 n1 n2 или i21 . n2 n1 (1.5) Если известно число зубьев z каждого колеса, то передаточное отношение передачи на рис. 1.4 i12 z2 z или i21 1 , z1 z2 (1.6) где z1 – число зубьев шестерни (поз.1 на рис. 1.4, а); z2 – число зубьев колеса (поз. 2 на рис. 1.4, а). На рис. 1.5 показана зубчатая передача внутреннего зацепления, которая не изменяет направление вращения ( i12 0, i21 0 , см. формулы (1.2)). Если вращение передается между непараллельными осями, передаточное отношение определяют по формулам (1.1). 7 2 1 а б Рис. 1.5. Зубчатая передача внутреннего зацепления Зубчатые передачи – самые распространенные механические передачи. Фрикционная передача. На рис. 1.6, а приведена фрикционная передача с постоянным передаточным отношением, в состав которой входят два катка 1 и 2, прижатых друг к другу. На рис. 1.6, б показана кинематическая схема такой передачи. 1 n1 2 n2 D2 Fr D1 а Fтр б Ft Рис. 1.6. Фрикционная передача В этом механизме для передачи движения используют силы трения Fтр, для создания которых катки прижимают друг к другу с силой Fr (см. рис. 1.6, б). Передаточное отношение фрикционной передачи: n D i12 i 1 1 2 , (1.7) 2 n2 D1 где D1 и D2 – диаметры меньшего и большего катков; знак « » объясняется тем, что неизбежно происходит проскальзывание катков. 8 С учетом скольжения передаточное отношение i D2 , D1 (1 ε) (1.8) где ε – коэффициент упругого скольжения, который зависит от конструкции передачи, упругих свойств материалов катков, величины нагрузки; ε = 0,005…0,03. Наибольшее применение фрикционные передачи получили в вариаторах1. На рис. 1.7 показан простейший лобовой вариатор. Рис. 1.7. Лобовой фрикционный вариатор: 1 и 2 – катки Основной кинематической характеристикой вариатора является диапазон регулирования передаточного отношения2: Д= ωmax imax . ωmin imin (1.9). Для вариатора, показанного на рис. 1.7, диапазон регулирования (см. формулы (1.8) и (1.9)) i D (1.10) Д max 2 max 3 . imin D2 min Принцип фрикционной передачи является основой технологического процесса в прокатных станах, а также основой работы рельсового и безрельсового колесного транспорта. 1 Вариатор – это механическая передача, способная плавно менять передаточное отношение в некотором диапазоне регулирования. 2 Диапазон регулирования угловой скорости ведомого вала при постоянной угловой скорости ведущего вала. 9 Червячная передача. На рис. 1.8, а приведена червячная передача, в состав которой входят червяк 1 и червячное колесо 2; на рис. 1.8, б показана ее кинематическая схема. Червячная передача передает вращение между скрещивающимися осями (см. рис. 1.8, б). а б Рис. 1.8. Червячная передача Передаточное отношение i12 1 z z 2 i21 1 , 2 z1 z2 (1.11) где z1 – число витков (винтовых линий, заходов) червяка (поз. 1 на рис. 1.8, а), z2 – число зубьев червячного колеса (поз. 2 на рис. 1.8, а). Ременная передача. На рис. 1.9, а приведена ременная передача, в состав которой входят два шкива 1 и 2 и ремень (гибкая связь) 3; на рис. 1.9, б – ее кинематическая схема. Ременная передача работает так же, как и фрикционная (см. рис. 1.6). Необходимая сила трения создается натяжением ремня. а б Рис. 1.9. Ременная передача 10 Передаточное отношение рассчитывают по формулам (1.7) и (1.8), в которых D1 и D2 – диаметры шкивов 1 и 2, коэффициент упругого скольжения ε = 0,01…0,03. Ременная передача – вторая после зубчатой по распространенности среди механических передач. Цепная передача. На рис. 1.10, а приведена цепная передача, в состав которой входят две звездочки 1 и 2 и цепь (гибкая связь) 3; на рис. 1.10, б показана ее кинематическая схема. а б Рис. 1.10. Цепная передача Среднее передаточное отношение цепной передачи i12 1 z z 2 i21 1 , 2 z1 z2 (1.12) где z1 и z2 – числа зубьев звездочек 1 и 2 (см. рис. 1.10). 1.2.2. Передаточные механизмы возвратнопоступательного и колебательного движения Рассмотрим передаточные механизмы, с помощью которых вращательное движение можно преобразовать в поступательное или колебательное, и наоборот. Такие механизмы характеризуются передаточной функцией – это первая производная от функции перемещения1 ведомого звена по углу поворота или линейному перемещению ведущего звена. 1 Функция перемещения (закон движения ведомого звена) – это функциональная зависимость между перемещениями ведомого и ведущего звеньев механизма. 11 Рычажные механизмы. Примером рычажного механизма является механизм на рис. 1.2. На рис. 1.11 приведена кинематическая схема кривошипноползунного механизма, в состав которого входит кривошип 1, шатун 2 и ползун 3. Этот механизм служит для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3, и наоборот. 1 2 3 Рис. 1.11. Кривошипно-ползунный механизм Передаточной функцией является зависимость скорости перемещения ползуна от угловой скорости кривошипа: v3 = f(1), и наоборот. Передача винт–гайка. На рис. 1.12 приведена передача винтгайка, которая предназначена для преобразования вращательного движения одного звена в поступательное движение другого. Передаточной функцией является зависимость скорости осевого перемещения гайки от угловой скорости винта: v2 = f(1). Рис. 1.12. Передача винт–гайка: 1 – винт; 2 – гайка Кулачковый механизм. На рис. 1.13 приведены кулачковый механизм, в состав которого входят кулачок 1 и толкатель 2, и его кинематическая схема. Передаточной функцией является зависимость скорости осевого перемещения толкателя от угловой скорости кулачка: v2 = f(1). 12 Рис. 1.13. Кулачковый механизм: 1 – кулачок; 2 – толкатель В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратнопоступательное или возвратно-качательное: например, для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т.д.1. Примеры по темам модуля 1 Пример 1. Схема машины дана на рис. 1.1. Частота вращения вала двигателя n1 =3000 об/мин. Угловая скорость вращения входного вала исполнительного механизма ω 2 = 2с–1. Подобрать червячную передачу, учитывая, что число витков (заходов) z1 червяка равно одному либо двум. Определить z1 и z2 . Решение. 1. Определим угловую скорость вращения вала двигателя (см. формулу (1.4)): πn π3000 1 1 100π c1. 30 30 2. Найдем передаточное отношение передачи вращения (см. формулу (1.1)): i12 100 π 50 . 2π 1В курсе «Теория механизмов и машин» изучают вопросы, связанные с профилированием кулачка. 13 3. Подберем червячную передачу. Вариант 1. Если число витков червяка z1 1 , то число зубьев червячного колеса из формулы (1.11) z2 i12 z1 50 . Вариант 2. Если число витков червяка z1 =2, то число зубьев червячного колеса z2 i12 z1 50 2 100. Пример 2. Зубчатая передача должна уменьшить частоту вращения вала 4 (см. рис. 1.4) в 3 раза. Определить число зубьев колеса z2 , если число зубьев шестерни z1 = 25. Решение. Число зубьев колеса из формулы (1.6) z2 = i12 z1 3 25 75 . Пример 3. Определить передаточное отношение механизма, приведенного на рис. 1.14, при заданных числах зубьев колес: z1 = 22, z2 = 77, z2 = 25, z3 = 50. Найти угловую скорость и частоту вращения ведущего вала 1, если вал 3 вращается с частотой n3 =300 об/мин. z1 1 ;n1 1 2 ;n2 z2I z2 2 3 z3 3 ;n3 Рис. 1.14. К примеру 3 Решение. 1. Определим передаточное отношение зубчатой передачи, установленной на валах 1 и 2: z 77 i12 2 3,5. 22 z1 14 2. Определим передаточное отношение зубчатой передачи, установленной на валах 2 и 3: z 50 i23 2 I4 2. 25 3 z2 3. Передаточное отношение механизма i13 ( ) i12 i23 3,5 2 7. 4. Найдем частоту вращения вала 1: n1 = i13n3 7 300 2100 об/мин. 5. Рассчитаем угловую скорость вращения вала 1: π2100 πn ω1 219,8 с 1 . 30 30 Ответ: передаточное отношение механизма равно 7, частота вращения вала 1 составляет 2100 об/мин, угловая скорость вращения – 219,8 с–1. Тест1 по темам модуля 1 1. Назовите передачу, которая используется в качестве передаточного механизма: Рис. 1 № рис. 1 2 3 4 Рис. 2 1 зубчатая зубчатая зубчатая зубчатая Рис. 3 2 червячная червячная червячная червячная 3 фрикционная фрикционная фрикционная фрикционная Рис. 4 4 винт–гайка винт–гайка винт–гайка винт–гайка 1 В тестах (здесь и далее) звездочкой (*) отмечены вопросы, которые имеют более одного правильного ответа. 15 2*. Определите передаточное отношение зубчатой передачи внешнего зацепления, если числа зубьев колес z1 = 21 и z2 = 63: 1 2 3 4 3 –3 –1/3 1/3 3. Найдите диапазон регулирования вариатора Д, если imax 3 , imin 2 : 1 1 2 –1,5 3 0,66 4 1,5 4*. На рисунке число зубьев шестерни конической пары z1 26 . Частота вращения вала 1 1 n1 1500 об/мин, угловая скорость вала 2 2 25c1 . Рассчитайте передаточное отношение механизма. Определите число зубьев колеса: 2 i12 , i21 z2 1 2 52 2 –2 13 3 0,5 52 4 –0,5 52 5. Назовите механизм, который используется в качестве передаточного механизма: Рис. 5 Рис. 6 РРис. 7.7 16 Рис. 8 № рис. 5 6 7 8 1 зубчатый зубчатый зубчатый зубчатый 2 рычажный рычажный рычажный рычажный 3 цепная передача цепная передача цепная передача цепная передача 4 кулачковый кулачковый кулачковый кулачковый 6*. Найдите передаточное отношение механизма на рис. 6, если n1 1600 об/мин, n2 =800 об/мин. 1 2 2 –2 3 –0,5 4 0,5 7. Механизмом называется устройство, предназначенное для: 1 2 3 4 увеличения жесткости конструкции увеличения прочности конструкции передачи и преобразования движения обеспечения неподвижности конструкции 8. Последовательность начала разработки проектно-конструкторской документации: 1 2 3 техническое предложе- техническое задание, техническое задание, ние, техническое зада- техническое предложе- эскизный проект, техние, эскизный проект ние, эскизный проект ническое предложение 9. Диаметры колес фрикционной передачи равны 50 мм и 100 мм. Определите передаточное отношение. Коэффициент упругого скольжения 0,03 . 1 2,06 2 –2,06 3 0,5 17 4 2 МОДУЛЬ 2 Тема 1. ОБЩИЕ ВОПРОСЫ РАСЧЕТА И КОНСТРУИРОВАНИЯ ДЕТАЛЕЙ МАШИН 1.3. Основные понятия и определения Любая машина (механизм) состоит из деталей. Деталь – это такая часть машины, которую изготавливают без сборочных операций. Примеры деталей: гладкий вал (рис. 1.15), пружинная шайба (рис. 1.16), гайка (рис. 1.17). Рис. 1.15. Вал Рис. 1.16. Шайба Рис. 1.17. Гайка На рис. 1.18 и 1.19 представлены более сложные детали: ступенчатый вал (на конце вала изображена резьба) и вал–шестерня, т.е. вал, на котором нарезаны зубья. Зубья Резьба Рис. 1.18. Ступенчатый вал Рис. 1.19. Вал-шестерня Детали объединяют в узлы. Узел – это законченная сборочная единица, состоящая из нескольких деталей, имеющих общее функциональное назначение. Примеры узлов: – поводковая муфта, соединяющая валы (рис. 1.20); Рис. 1.20. Муфта поводковая: 1, 2 – полумуфты; 3 – палец 18 – подшипник качения; – вал с насаженным на него зубчатым колесом (рис. 1.4, а). Детали (узлы) общего назначения – это такие детали (узлы), которые применяют почти во всех машинах (валы, муфты, механические передачи) в отличие от деталей специального назначения (лопатки турбин и т.п.). 1.4. Общие требования к машинам, их деталям и узлам Основное требование, предъявляемое к машине, ее узлам и деталям, это высокое качество. Качество оценивается высокими эксплуатационными показателями, работоспособностью, высокой надежностью, безопасностью в эксплуатации, технологичностью и экономичностью машины, ее узла, детали. Работоспособность – это свойство машины, узла, детали выполнять заданные функции с сохранением прочности, неизменяемости размеров и формы, износостойкости, устойчивости, теплостойкости и т.п. Под надежностью понимают свойство сохранять в течение всего времени эксплуатации свою работоспособность. Технологичность – это обеспечение наименьших затрат труда и времени при изготовлении детали, узла, машины. Экономичность определяется стоимостью материала и затратами на производство и эксплуатацию. 1.5. Основные критерии работоспособности деталей К основным критериям работоспособности относят прочность, жесткость, износостойкость, теплостойкость, коррозионную стойкость. Прочность – это способность детали сопротивляться объемному разрушению под нагрузкой. Жесткость – это способность детали сопротивляться изменению формы и размеров под нагрузкой. Износостойкость – это способность детали сопротивляться поверхностному разрушению под нагрузкой. 19 Теплостойкость – это способность детали сопротивляться вредным последствиям перегрева. Коррозионная стойкость – способность детали сопротивляться разрушению поверхности в результате окисления металла. При конструировании деталей их работоспособность обеспечивают выбором соответствующего материала, рациональной конструкцией и расчетом размеров по главным критериям. 1.6. Критерии прочности Прочность является главным критерием работоспособности большинства деталей. Основы расчетов на прочность изучают в курсе сопротивления материалов. В курсе деталей машин и основ конструирования общие методы расчетов на прочность рассматривают в приложении к конкретным деталям и придают им форму инженерных расчетов. Работоспособность деталей машин по критерию прочности обеспечивается условием прочности: оп или оп , n n (1.13) где или – напряжение, рассчитанное в опасном сечении детали; оп или оп – опасное напряжение, превышение которого в данных условиях работы приводит деталь к выходу из строя; n – допускаемый коэффициент запаса прочности, который определяется по правилам, выработанным в машиностроении для конкретных деталей и условий эксплуатации; или – допускаемое напряжение. Различают разрушение деталей вследствие потери статической прочности и потери сопротивления усталости [6]. 1.6.1. Расчеты на прочность В случае статической прочности опасное напряжение оп или оп (см. условие (1.13)) для пластичных материалов равно пределу текучести т ( т ), для хрупких материалов – пределу 20 прочности пч 1 ( пч ). Напряжения т и в являются механическими характеристиками материалов и имеются в справочной литературе (см. далее табл. 1.1). Напряжения и в условиях прочности (1.13) рассчитывают по формулам, известным из курса сопротивления материалов [6], в зависимости от вида нагружения. 1. Если деталь испытывает осевое растяжение (сжатие), то нормальное напряжение N (1.14) , A где N – продольная сила в опасном (поперечном) сечении; A – площадь опасного сечения. 2. Если деталь работает на срез, то касательное напряжение Fср (1.15) ср , A где Fср – сила среза в опасном сечении; A – площадь опасного сеσр = чения. 3. При плоском изгибе прямолинейных деталей нормальное напряжение и Mи , W (1.16) где M и – изгибающий момент в опасном (поперечном) сечении; W – осевой момент сопротивления2 плоского сечения. 4. При кручении цилиндрических деталей касательное напряжение к Mк , Wp (1.18) в (временное сопротивление разрыву). 1 В дальнейшем пч 2 Осевой момент сопротивления круглого сечения диаметром d W d 0,1d 3 . 32 3 21 (1.17) где M к – крутящий момент в опасном (поперечном) сечении; W p – полярный момент сопротивления1 плоского сечения. 1.6.2. Расчеты на усталостную прочность (выносливость) Разрушение деталей вследствие потери сопротивления усталости происходит в результате длительного действия переменных напряжений, превышающих предел выносливости r материала. Сопротивление усталости значительно понижается из-за концентраторов напряжений, связанных с конструктивной формой детали, из-за дефектов, т.е. низкого качества, поверхности детали (царапины, трещины). На рис. 1.21 примерами концентраторов напряжений являются канавки и буртики (заплечик – выступ на валу, или буртик, к которому устанавливают подшипник). Для уменьшения концентрации напряжений в месте изменения формы детали предусматривают галтель. Рис. 1.21. Концентраторы напряжений на ступенчатом валу Переменные напряжения изменяются циклически. Различают асимметричный (рис. 1.22) и симметричный (рис. 1.23) циклы напряжений. Частным случаем асимметричного является отнулевой цикл (рис. 1.24). 1 Полярный момент сопротивления круглого сечения диаметром d Wp d 3 16 22 0, 2d 3 . (1.19) Рис. 1.22. Параметры асимметричного цикла напряжений Параметры цикла напряжений (см. рис. 1.22–1.24): – максимальное max и минимальное min значения напряжений; max min ; 2 min – среднее напряжение цикла m max ; 2 – коэффициент асимметрии цикла r min . max – амплитуда цикла a Рис. 1.23. Симметричный цикл Рис. 1.24. Отнулевой цикл Для симметричного цикла с коэффициентом асимметрии r 1 предел выносливости r 1 имеет минимальное значение и является нормативной механической характеристикой материала (см. далее табл. 1.1), которую определяют в ходе испытаний на выносливость. Условие выносливости (усталостной прочности) имеет вид, аналогичный формулам (1.13): (1.20) оп или оп , s s 23 где оп или оп зависит от предела выносливости материала σ r ; s или s , в общем случае s – коэффициент запаса уста- лостной прочности. Расчет напряжений () и ( ) из условия (1.20) проводится по эмпирическим формулам, учитывающим, что сопротивление усталости зависит от параметров цикла напряжений, наличия концентраторов, качества поверхности, размеров детали и, наконец, от длительности работы детали. В инженерных расчетах реальные конструкции заменяют расчетными схемами, поэтому расчеты по условиям статической прочности и выносливости становятся приближенными. Неточности расчетов на прочность компенсируют в основном за счет запасов прочности, поэтому выбор коэффициентов запаса прочности n и s является ответственным этапом расчета. В дальнейшем будут рассмотрены особенности расчета на статическую прочность и выносливость конкретных деталей машин. 1.7. Краткие сведения о материалах, применяемых в машиностроении При выборе материала детали учитывают следующие факторы: – соответствие свойств материала критериям работоспособности (прочность, износостойкость и т.д.) и другим требованиям, связанным с назначением, условиями эксплуатации и т.д.; – требования к массе и габаритам детали и машины в целом; – соответствие намеченному способу обработки детали (штампуемость, литейные свойства и т.д.); – стоимость и дефицитность материала. Наиболее распространенными материалами в машиностроении являются стали, чугуны, бронзы, пластмассы и т.д. Широкое распространение черных металлов (стали и чугуны) связано с их высокой прочностью и жесткостью, а также невысокой стоимостью. Основные недостатки – большая плотность и слабая коррозионная стойкость. Характеристики некоторых сталей приведены в табл. 1.1. Дополнительная химико-термическая обработка стальной детали позволяет повысить прочность. 24 Цветные металлы значительно дороже и используются для выполнения особых требований: антифрикционности (низкий коэффициент трения скольжения), легкости, антикоррозионности и т.д. Пластмассы обладают высокой прочностью, технологичны, легки, их применение в машиностроении все более расширяется. Таблица 1.1 Характеристики некоторых марок сталей Материал т 1 МПа 380–470 240 180 500–620 280 240 350 520 210 300 160 230 600 340 260 Сталь 20Х 800 600 350 Сталь 40Х 1000 800 420 Марка Сталь углеродиСталь Ст3 стая обыкновенного качества Сталь Ст5 (ГОСТ 380-94) Сталь углеродиСталь 15 стая, качественная Сталь 35 конструкционная (ГОСТ 1050-88) Сталь 45 Сталь легированная конструкционная (ГОСТ 4543-71) пч ( в ) Область применения (примерная) Заклепки, болты, гайки. Валы, оси, шпонки Кулачки. Оси, валы, болты, гайки. Зубчатые колеса, муфты Зубчатые колеса, муфты. Зубчатые колеса, катки, оси, валы В расчетах на статическую прочность деталей из материалов, приведенных в табл. 1.1, принимают оп 0,6 оп . Если в результате расчета на прочность определяют размеры детали, то такой расчет называют проектировочным (проектным). Если проверяют условие прочности (см., например, условие (1.20)), то расчет называют проверочным. В дальнейшем расчеты на прочность будем проводить с использованием системы СИ в качестве системы измерений (если не оговаривается специально). Единицами измерения длины служат мм, силы – Н, момента силы – Нмм, механического напряжения – МПа, так как Н 106 Н Н 1МПа = 106 2 = 6 2 =1 2 . мм м 10 мм 25 Примеры по темам модуля 2 Пример 1. На неподвижную ось диаметром d = 40 мм действует статическая нагрузка F = 25 кН (рис. 1.25), ось изготовлена из пластичного материала (сталь Ст5). Проверить прочность оси; коэффициент запаса прочности принять равным 2,5. Решение. Проверку прочности проведем по условию (1.13), учитывая, что ось испытывает осевое растяжение (см. рис. 1.25, а). 1. Напряжения в поперечном сечении при растяжении (см. формулу (1.14)) N F 25000 р 19,9 МПа ≈ 20 МПа, A A 1256 где продольная сила N = F = 25 кН = 25000 Н (из условия равновесия оси на рис. 1.25, б, в); площадь поперечного сечения A F d 2 402 1256 мм 2 . 4 4 F F N Fi 0 FN а б в Рис. 1.25. Определение продольной силы N методом сечений 2. Допускаемые напряжения (см. формулу (1.13)) оп т 280 112 МПа, n n 2,5 где предел текучести т стали Ст5 – из табл. 1.1. 3. Условие прочности выполняется, так как р 20 МПа 112 МПа. 26 Пример 2. Статическая нагрузка на одну заклепку из стали F 28 кН (рис. 1.26). Из условия прочности на срез найти минимальный диаметр заклепки. Принять 140 МПа. F F Fср F Рис. 1.26. Заклепка работает на срез и смятие Решение. 1. В условие (1.13) подставим выражение для напряжения из формулы (1.15), получим условие прочности на срез: Fср оп ср , A n из которого минимальная площадь поперечного сечения заклепки Fср F 28 103 A 200 мм2, 140 где Fср = F из условия равновесия заклепки (см. рис.1.26). 2. Рассчитаем минимальный диаметр одной заклепки d 4A 4 200 16 мм. Пример 3. На рис. 1.27 дана схема привода, в состав которого входят двигатель и редуктор1, к исполнительному механизму. Мощность, потребляемая исполнительным механизмом, P2 2,62 кВт. Передаточное отношение зубчатой передачи i12 –6. Частота вращения вала двигателя n1 1500 об/мин. Из условия прочности на кручение найти диаметр цилиндрического конца выходного ва- Редуктором называют передаточный механизм, уменьшающий частоту вращения выходного вала (при этом вращающий момент на выходном валу редуктора увеличивается). 1 27 ла редуктора (диаметр консоли), полагая, что 40 МПа. Редуктор ИМ М 1 2 Рис. 1.27. Схема привода Решение. 1. Определим вращающий момент Т 2 , приложенный к выходному валу 2 (см. рис. 1.27). Потребляемая мощность: P2 Т 2 , где угловая скорость выходного вала 2 n1 1500 26, 2 c–1; i 30 i 30 6 и n1 – угловая скорость и частота вращения входного вала 1 редуктора соответственно. Вращающий момент Т 2 Р2 = 262026,2 = 100 Нм. 2. На рис. 1.28 представлены расчетная схема консоли вала 2 и эпюра крутящих моментов М к . Из эпюры следует, что М к Т 2 100 Нм. Т2 Т2 Мк Рис. 1.28. Эпюра крутящих моментов 3. В условие (1.13) подставим формулу (1.18) с учетом (1.19), в результате получим условие прочности на кручение: M T2 к к , Wp d 23 /16 28 из которого выразим искомый диаметр: d2 3 16T2 3 16 100 103 23, 4 23 мм. 40 Пример 4. Рассчитать параметры отнулевого цикла (см. рис. 1.24), по которому изменяются наибольшие касательные напряжения скручиваемого вала, если max 100 МПа. Решение. 1. Минимальное значение напряжений min 0. 2. Амплитуда цикла 100 a max min max 50 МПа. 2 2 2 3. Среднее напряжение цикла min max 100 m max 50 МПа. 2 2 2 4. Коэффициент асимметрии цикла r 0 . Тест по темам модуля 2 1. Зубчатая передача – это: 1 2 3 4 деталь узел механизм машина 2. Как называется способность детали сопротивляться объемному разрушению под нагрузкой? 1 2 3 4 Жесткость Износостойкость Прочность Теплостойкость 3. Как называется способность детали сопротивляться изменению формы и размеров? 1 2 3 4 Прочность Износостойкость Жесткость Теплостойкость 29 4*. Условие прочности имеет вид: 1 оп n 2 ср Fср A 3 и Mи W 4 5. Условие прочности при растяжении (сжатии) имеет вид: 1 2 3 4 M и и W N р A M к к Wp Fср ср A 6. Условие прочности при кручении имеет вид: 1 и 2 Mи W р 3 M к к Wp N A 4 ср Fср A 7. Условие прочности при изгибе имеет вид: 1 р 2 N A 3 M к к Wp и Mи W 4 ср Fср A 8*. Концентраторы напряжений: 1 не влияют на усталостную прочность детали 2 3 уменьшают уста- влияют на усталостную прочлостную прочность детали ность детали 4 увеличивают выносливость детали 9. Условие прочности при срезе имеет вид: 1 и 2 Mи W ср Fср A 3 4 р N A 10. Касательные напряжения в поперечном сечении вала изменяются по симметричному циклу. Чему равно min и m , если амплитуда напряжений a = 60 МПа? 30 1 2 3 4 min –60 МПа 30 МПа 60 МПа –30 МПа m 0 30 МПа 0 –30 МПа 11*. Плохое состояние поверхности детали (царапины, трещины): 1 влияет на усталостную прочность 2 не влияет на выносливость детали 3 уменьшает усталостную прочность детали 4 увеличивает выносливость детали 12. Дополнительная химико-термическая обработка стальной детали позволяет повысить: 1 2 3 4 мощность прочность теплостойкость жесткость 13. Материалы для изготовления ответственных деталей выбирают в соответствии с: 1 ремонтопригодностью 2 экологичностью 3 величиной нагрузки 4 критериями работоспособности 14. Гайка, болт, шайба – это: 1 2 3 4 детали узлы механизмы элементы детали 15*. Колесо, напрессованное на вал, подшипник качения – это: 1 детали 2 узлы 3 механизмы 4 сборочные единицы 16. Редуктор – это: 1 2 деталь технологическая машина 3 механизм, понижающий частоту вращения 31 4 вариатор МОДУЛЬ 3 Тема 2. ПЕРЕДАЧА ВИНТ–ГАЙКА 2.1. Общие сведения о передаче винт–гайка Передача винт–гайка служит для преобразования вращательного движения в поступательное (см. рис. 1.12 и 2.1). При вращении гайки, закрепленной от осевых перемещений, винт движется поступательно; если вращается винт, закрепленный от осевых перемещений, то поступательно перемещается гайка. Различают передачи скольжения (см. рис.2.1, а), работающие с трением скольжения, и передачи качения (см. рис.2.1, б), работающие преимущественно с трением качения. В передачах скольжения используют резьбы различного профиля (см. рис. 2.1, а). В передачах качения между витками винта и гайки размещены тела качения – шарики [5]1 (см. рис. 2.1, б). а б Рис. 2.1 Передачи винт–гайка Достоинства передачи винт–гайка скольжения: – возможность получения перемещений с высокой точностью; – значительный выигрыш в силе из-за клинового действия резьбы; – малые габариты при высокой несущей способности; – плавность и бесшумность работы; – относительная простота конструкции и изготовления. В данном пособии рассмотрены только передачи с трением скольжения. 1 32 Основные недостатки передачи винт–гайка с трением скольжения: изнашивание и повышенные потери на трение, следствием чего является низкий КПД. В связи с этим возможность преобразования поступательного движения во вращательное передачей винт–гайка в силовых механизмах используется редко. Передачи с трением качения лишены этих недостатков, но их конструкция сложнее и стоимость выше. Материалы винта и гайки должны представлять антифрикционную пару, т.е. быть износостойкими и иметь малый коэффициент трения. Выбор марки материала зависит от назначения передачи, условий работы и способа обработки резьбы. Винты изготавливают из сталей марок 45, 50, 40ХГ, У10 и др. В ответственных передачах для повышения износостойкости применяют закалку винтов до твердости не менее 45 НRС с последующим шлифованием резьбы. Гайки ответственных передач изготавливают из оловянных бронз марок БрО10Ф1, БрО6Ц6С3 и др., а в тихоходных слабонагруженных передачах – из антифрикционных чугунов марок АВЧ-1, АКЧ-1 или серого чугуна СЧ 20. Передачи винт–гайка применяют в приводах нажимных устройств (прокатные станы, прессы, домкраты, тиски, разрывные машины), в станкостроении (механизмы подачи), авиастроении (механизмы управления), в точных измерительных приборах (механизмы делительных перемещений) и др. [5]. В предварительных расчетах можно принимать: для передачи с трением скольжения КПД = 0,25...0,35; для передачи с трением качения = 0,9...0,95. 2.2. Основные типы резьб Основной элемент резьбового соединения – это винтовая пара, которая состоит из винта и гайки (рис. 2.2). Винт характеризуется шагом винтовой линии P и ходом Ph (рис. 2.3), которые связаны соотношением Ph P n , где n – число заходов резьбы. 33 На рис. 2.3 n 1 , поэтому На рис 2.4 n 2 . Ph P n P . Рис. 2.2. Винтовая пара (2.1) Рис. 2.3. Однозаходный винт Рис. 2.4. Двухзаходный винт У резьб различают: диаметры (см. рис. 2.3, 2.4) – наружный (номинальный) d , внутренний d1 и средний d 2 ; углы – угол профиля , угол наклона боковой рабочей поверхности . Угол – это угол подъема резьбы (винтовой линии): tg = Ph Pn . d 2 d 2 34 (2.2) В случае однозаходной резьбы угол подъема резьбы (см. рис. 2.3) arctg Ph P arctg . d 2 d 2 (2.3) Обычно применяемые резьбы разделяют на крепежные (предназначенные для скрепления деталей) и ходовые, которые используют в передачах винт–гайка (см. рис. 1.12, 2.1). В качестве резьб винтовых механизмов (ходовых резьб) чаще всего используют трапецеидальные1: – трапецеидальную симметричную, или трапецеидальную резьбу (рис. 2.5); – трапецеидальную несимметричную, или упорную резьбу (рис. 2.6). Рис. 2.6. Упорная резьба Рис. 2.5. Трапецеидальная резьба Дополнительно. В основные размеры резьб входят: рабочая высота профиля Н1; внутренний диаметр внутренней резьбы (внутренний диаметр резьбы гайки) D1 ( d1 ) ; внутренний диаметр наружной резьбы (внутренний диаметр резьбы винта по впадине) d 3 . Для стандартной трапецеидальной резьбы рабочая высота и угол наклона каждой боковой рабочей поверхности: H1 0,5 P и 15 . (2.4) Для стандартной упорной резьбы рабочая высота и угол наклона боковой рабочей поверхности: H1 0,75P и 3 . 1 (2.5) Треугольную резьбу (метрическую) в винтовых механизмах используют редко. 35 2.3. Трение в винтовой паре При определении момента сил трения в паре винт–гайка (рис. 2.7) полагают: – вся осевая нагрузка F (сила полезного сопротивления) на винт сосредоточена на одном витке резьбы (рис. 2.7, б); – реакция гайки 2 на винт 1 (или наоборот) приложена по средней линии резьбы, т.е. на расстоянии d 2 / 2 от общей оси винта и гайки (рис. 2.8). Из условия равновесия (см. рис. 2.7, б) нормальная реакция F . cos N а б Рис. 2.7. Силы в паре винт–гайка Рис. 2.8. Виток резьбы 36 Сила трения Fтр fN f F f F f F , cos cos где f – приведенный коэффициент трения. Приведенный угол трения (рис. 2.9) f arctgf arctg (2.6) , cos где f – коэффициент трения, который в первую очередь зависит от свойств материалов пары винт–гайка и состояния трущихся поверхностей (шероховатости, загрязненности); угол в зависимости от типа резьбы определяют по формулам (2.4) или (2.5). Кроме того, развернутые элементы винта 1 и гайки 2 представляют приближенно плоскими поверхностями с углом наклона (см. рис. 2.9), а перемещение гайки по резьбе винта рассматривают как движение ползуна вверх по наклонной плоскости. Рис. 2.9. Сила трения в паре винт–гайка Полагая, что движение гайки относительно винта аналогично равномерному движению ползуна вверх под действием движущей силы Fд , получают следующее условие равновесия (см. рис. 2.8 и 2.9): Р F Fд R 0, (2.7) где R N Fтр . Из плана сил на рис. 2.9 находят соотношение активных сил – движущей силы Fд и силы полезного сопротивления F : 37 – движущая сила, необходимая для равномерного относительного перемещения винта 1 и гайки 2 (если ведущим звеном является винт), (2.8) Fд Ftg( ) ; – момент пары, необходимый для равномерного относительного перемещения винта и гайки, (2.9) T 0,5d2 Fд 0,5d2 Ftg( ) . В выражениях (2.8) и (2.9) угол подъема определяют по формуле (2.2), а приведенный угол трения – по формуле (2.6). 2.4. Самоторможение в винтовой паре На рис. 2.10 приведен план сил в случае, когда ведущим звеном является гайка. Условие равновесия соответствует выражению (2.7). Из плана сил находят соотношение активных сил: (2.10) Fд Ftg( ) , Из формулы (2.10) следует невозможность относительного движения в паре гайка–винт, если угол подъема винтовой линии меньше приведенного угла трения . Рис. 2.10. Соотношение сил в паре винт–гайка Таким образом, условие самоторможения можно записать в виде (2.11) . 38 Ходовые резьбы в зависимости от области применения выполняют как самотормозящими, так и несамотормозящими. 2.5. Коэффициент полезного действия винтовой пары 2.5.1. Ведущее звено – винт Для всех механизмов рассчитывают КПД как отношение полезной работы к затраченной работе. Если ведущим звеном является винт (см. рис. 2.9), то полезная работа силы F на перемещении y Ph Aп F y , затраченная работа силы Fд на перемещении x d 2 Aз Fд x . Коэффициент полезного действия F Ph Aп F y . Aз Fд x Fд d 2 (2.12) Подставляя соотношение (2.8) в (2.12) с учетом (2.2), получают: F Ph tg . Ftg( + ) d2 tg( +) (2.13) 2.5.2. Ведущее звено – гайка Если ведущим звеном является гайка (см. рис. 2.10), то полезная работа силы Fд на перемещении x d 2 Aп Fд x ; затраченная работа силы F на перемещении y Ph Aз F y . Коэффициент полезного действия F x F d 2 Aп . д д Aз F y F Ph 39 (2.14) Подставляя соотношение (2.10) в (2.14) с учетом (2.2), получают: Ftg( ) d 2 tg( ) . F Ph tg (2.15) 2.5.3. КПД механизма винт–гайка с самоторможением В самотормозящей паре , поэтому формула (2.15) дает отрицательный результат, что является признаком отсутствия движения при ведущей гайке. КПД такого механизма (ведущим звеном является винт) рассчитывается по формуле (2.13) и не превышает 0,5 ( 0,5 ). У самотормозящих винтовых механизмов КПД меньше 0,5. 2.6. Основной критерий работоспособности ходовой резьбы винтового механизма. Проектировочный расчет Основным критерием работоспособности ходовой резьбы пары винт–гайка является условие износостойкости. Для обеспечения необходимой износостойкости передачи винт–гайка давление в резьбе q не должно превышать допускаемую величину [ q ] . Условие износостойкости имеет вид F q [q] , d 2 H1 z (2.16) где F – осевая нагрузка (см. рис. 2.7); d 2 – средний диаметр резьбы; H1 – рабочая высота профиля; z – число витков гайки. Допускаемое давление [ q ] задают в зависимости от материалов трущейся пары. Условие (2.16) используют для проверочного расчета. При проектировочном расчете определяют размеры резьбы, входящие в условие (2.16). Для этого вводят два коэффициента: 40 1) коэффициент рабочей высоты профиля H1 , P где P – шаг резьбы; для стандартной трапецеидальной резьбы 0,5 ; для упорной резьбы – 0,75 ; 2) коэффициент высоты гайки h / d2 , (где h – высота гайки) выбирают из диапазона 1,2 2,5 . (2.17) Используя параметры и , и решая неравенство (2.16) относительно d 2 , получают условие для расчета среднего диаметра резьбы: d2 F . q (2.18) Затем из условия (2.16) выражают рабочую высоту профиля: H1min F d 2 min z q , (2.19) где d 2min определяют по формуле (2.18); число витков гайки z выбирают в пределах 6 z 12 . (2.20) Зная рабочую высоту профиля H 1min , находят шаг резьбы Pmin H1 . (2.21) По полученным данным d 2min и Pmin подбирают стандартные размеры резьбы. 41 2.7. Расчеты на прочность ходовых винтов (пары винт–гайка) Проверочными расчетами ходовых винтов являются: – расчет на устойчивость (расчет на прочность при продольном изгибе)1; – расчет на прочность при совместном действии сжатия и кручения. 2.7.1. Проверка грузового винта на устойчивость Проверка винта на устойчивость сводится к выполнению условия F (2.22) у с , A где – нормальное напряжение в поперечном сечении винта; F – осевая сила, сжимающая винт (см. эпюру сжимающих сил на рис. 2.12); A – площадь сечения, не ослабленного резьбой, d 2 , (2.23) A 4 d – номинальный диаметр резьбы; у – допускаемое напряжение на сжатие с учетом опасности продольного изгиба; с – допускаемое напряжение на сжатие без учета опасности продольного изгиба; – коэффициент продольного изгиба (коэффициент уменьшения допускаемого напряжения). Допускаемое напряжение (2.24) c т т . n При расчете допускаемого напряжения учитывают масштабный фактор т , который зависит от диаметра винта и обычно представляется в табличной форме на основе экспериментальных данных; о выборе параметров т и n см. параграфы 1.6 и 1.7. 1 Расчеты сжатых стержней на устойчивость рассматривают в курсе сопротивления материалов, например расчет по формуле Эйлера и эмпирическим формулам [6]. 42 Коэффициент зависит от материала и гибкости стержня. Гибкость стержня (гибкость винта) lp , (2.25) i где – коэффициент приведения, который учитывает способ закрепления концов винта, например, на рис. 2.11 = 2 для домкратов (один конец винта свободен, а другой заделан, установлен в гайке) и = 1 для прессов (условно считают, что оба конца винта имеют шарнирные опоры); l p – длина сжатой части винта; i I / Amin – радиус инерции поперечного сечения винта, для круглого сечения i 0, 25d 3 . (2.26) Рис. 2.11. Коэффициент приведения Зависимость () обычно представляют в табличной форме. Если условие (2.22) не выполняется, то: – необходимо выбрать из ГОСТ новые параметры резьбы (с большим номинальным диаметром d ); – повторить проверку грузового винта на устойчивость. 2.7.2. Проверка грузового винта на прочность при совместном действии сжатия и кручения На примере винтового домкрата рассмотрим проверку прочности винта. На рис. 2.12 показаны схема винтового домкрата и эпюры внутренних факторов в материале винта. В стержне винта возникают напряжения сжатия под действием нагрузки F и напряжения кручения под действием момента тре- 43 ния в резьбе Тр на участке bd или момента трения в пяте1 Тf на участке ab . Рис. 2.12. Схема винтового домкрата и эпюры внутренних факторов для винта Расчетная формула для эквивалентного напряжения по четвертой теории прочности: 2 2 M F Э 3 3 к c , W A p где площадь опасного сечения винта 2 с 2 к A d 32 ; 4 (2.27) (2.28) крутящий момент M к в зависимости от конструкции механизма – это либо момент трения в резьбе Tр (см. формулу (2.9)), либо момент трения в пяте T f , который зависит от формы пяты; Wp – полярный момент сопротивления круглого сечения винта с диаметром d3 (см. формулу (1.19)); c – по формуле (2.24). Пята – это опорная поверхность в винтовом механизме (см. рис. 2.12). 1 44 Примеры по темам модуля 3 Пример 1. Рассчитать допускаемое напряжение на сжатие ходового винта из стали 35 (ГОСТ 1050-88) с номинальным диаметром резьбы d 18 мм. Принять коэффициент запаса прочности n 2 . Решение. Допускаемое напряжение на сжатие ходового винта рассчитывают по формуле (2.24) c т т , n где предел текучести для стали 35 (в случае термообработки – улучшение) σ т 300 МПа; масштабный фактор т , величина которого зависит от диаметра винта d, выбирают из табл. 2.1: т 0,984 . Таблица 2.1 Масштабный фактор для углеродистой и легированной сталей d, мм 10 15 20 25 30 35 40 45 50 т 1,0 0,99 0,98 0,975 0,97 0,96 0,95 0,935 0,92 Допускаемое напряжение T ε T 300 0,984 147,6 148 МПа. 2 n Пример 2. Подобрать для винтовой пары домкрата (см. рис. 2.12) стандартную упорную резьбу (см. рис. 2.6). Осевая сила F 8 кН. В качестве материала винта выбрать незакаленную сталь 35 (ГОСТ 1050-88), для гайки – бронзу марки БрО10Ф1 (ГОСТ 613-79); коэффициент трения пары незакаленная стальбронза f 0,1 . Допускаемое удельное давление в контакте неза- c каленной стали с бронзой q 10 МПа. Число витков гайки принять равным 10 ( z 10 ). Проверить пару на самоторможение, приняв запас по самоторможению равным 1,2. Определить КПД пары винт-гайка. 45 Решение. Размеры упорной резьбы могут быть выбраны из ГОСТ 10177-82. 1. Средний диаметр резьбы (см. формулу (2.18)) с учетом, что 0,75 (резьба упорная), 2 (см. условие (2.17)): d2 F 8000 13 мм. q 0,75 2 10 (2.29) 2. Рабочая высота профиля резьбы (см. формулу (2.19)): H1 F 8000 1,96 мм. d 2 z q π 13 10 10 (2.30) 3. Минимальное значение шага резьбы (см. формулу (2.21)) Pmin H1 1,96 2,6 мм. 0,75 4. Для d 2 13 мм и Pmin 2,6 мм из ГОСТ 10177-82 подходит резьба с d 16 мм, d 2 13 мм и P 4 мм, d3 9,058 мм. 5. Проверка винтовой пары на самоторможение по условию (2.11): – угол подъема резьбы при n 1 (см. формулу (2.3)) P 4 O arc tg arc tg 5,60 ; d π 13 2 – приведенный угол трения (см. формулу (2.6)) f 0,1 arc tg 5,72O , arc tg O cos3 cos где значение угла для упорной резьбы получают из выражения (2.5). Запас самоторможения K / 5,72 / 5,60 1,02 1,2 , т.е. запас самоторможения недостаточен. 6. Для выполнения заданного условия самоторможения необходимо изменить параметры резьбы так, чтобы угол подъема резь46 бы стал меньше. Из ГОСТ 10177-82 подберем резьбу: d 20 мм, d 2 17 мм и P 4 мм, d3 13,058 мм. Угол подъема резьбы при n 1 P 4 о arc tg arc tg 4,29 . d π 17 2 Запас самоторможения K / 5,72 / 4,29 1,33 1,2 . Таким образом, для винтовой пары домкрата подобрана самотормозящая упорная резьба со следующими размерами: d 20 мм, d 2 17 мм и P 4 мм, d3 13,058 мм. 7. КПД пары винт–гайка определим, используя формулу (2.13): tg tg4,29 0,43 . tg( +) tg(4,29+5,72) Пример 3. Найти скорость перемещения гайки в паре винт– гайка, если шаг P 6 мм, частота вращения винта n1 1000 мин-1. Решение. 1. Скорость перемещения гайки v2 P n1 6 мм 1000 об/мин 0,1 м/с. 3 60 10 60 103 Пример 4. Однозаходная винтовая передача заменена двухзаходной с тем же диаметром и профилем резьбы. Если скорость вращения винта остается прежней, то во сколько раз изменилась скорость осевого перемещения гайки? Решение. При замене однозаходной винтовой передачи на двухзаходную изменилась функция перемещения гайки: вдвое увеличился ход резьбы (см. формулу (2.1)), следовательно, в 2 раза возросло осевое перемещение гайки. В единицу времени перемещение увеличилось вдвое, т.е. скорость осевого перемещения гайки возросла вдвое. 47 Тест по темам модуля 3 1*. Достоинства передачи винт–гайка – это: 1 2 3 высокий значительный выигрыш в плавность и бесшумКПД силе ность 4 простота конструкции 2. КПД винтовой пары, обладающей самоторможением: 1 0,5 2 0,5 3 0,5 4 0,5 3. Номинальным диаметром резьбы является: 1 2 ход резьбы средний диаметр 3 внутренний диаметр 4 наружный диаметр 4*. Какие резьбы чаще всего используются в качестве ходовых? 1 Крепежная резьба 2 Метрическая резьба 3 Упорная резьба 4 Трапецеидальная резьба 5. Условие самоторможения – это: 1 2 3 4 / 1 6*. Недостатки передачи винт–гайка с трением скольжения: 1 большие потери на трение 2 отсутствие самоторможения 3 4 материалы пары сложная конантифрикцион- струкция ные 7*. Какие виды нагружений испытывает винт домкрата? 1 Изгиб 2 Сжатие 3 Кручение 48 4 Растяжение 8. Основной критерий работоспособности ходовой резьбы: 1 2 условие устойчивости 3 4 условие прочно- условие износости стойкости условие прочности на срез 9*. Проверочные расчеты ходового винта домкрата – это: 1 расчет на устойчивость 2 расчет на прочность 3 расчет на износостойкость 4 подбор размеров резьбы 10. В результате проектировочного расчета ходового винта: 1 2 винт проверяют винт провена устойчивости ряют на прочности 3 определяют размеры резьбы 4 проверяют условие самоторможения 11. Если условие устойчивости ходового винта не выполняется, то необходимо (для выполнения этого условия): 1 увеличить шаг резьбы 2 увеличить номинальный диаметр 3 уменьшить номинальный диаметр 4 уменьшить шаг резьбы 12*. Если условие самоторможения в паре винт–гайка не выполняется, то необходимо (для выполнения этого условия): 1 увеличить шаг резьбы 2 3 увеличить номинальный диаметр уменьшить номинальный диаметр 4 уменьшить шаг резьбы 13. Для того чтобы повысить КПД винтового механизма, необходимо: 1 2 3 4 увеличить увеличить высоту смазать переда- уменьшить шаг диаметр винта гайки чу резьбы 49 14. К передачам трением относят: 1 цепные 2 фрикционные 3 4 передачи винт– гайка зубчатые передачи 15*. К передачам зацеплением относят: 1 цепные 2 фрикционные 3 червячные 4 зубчатые передачи 16. Чему равна потерянная на трение мощность в винтовом домкрате, если подводимая мощность равна 10 кВт, а КПД механизма составляет 30%? 1 2 3 4 3 кВт 7 кВт 0,7 кВт 0,3 кВт 50 МОДУЛЬ 4 Тема 3. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 3.1. Зубчатые передачи 3.1.1. Основные типы зубчатых передач и их сравнительная оценка Зубчатые передачи наиболее распространены в современном машиностроении. Звенья их зацепляются друг с другом, движение происходит под действием давления ведущего зуба на ведомый. В зависимости от относительного положения геометрических осей ведущего и ведомого валов, на которых установлены зубчатые колеса, различают: – передачи с цилиндрическими колесами внешнего и внутреннего зацепления, которые применяют при параллельных осях валов (рис. 3.1 и 3.2, а также рис. 1.5); – передачи с коническими колесами, которые применяют при пересекающихся осях валов (рис. 3.3, 3.4); – передачи с винтовыми (рис. 3.5), гипоидными (рис. 3.6) колесами, которые применяют при скрещивающихся осях валов1. 1 2 а б в г д Рис. 3.1. Цилиндрические передачи внешнего зацепления Цилиндрические колеса могут быть прямозубыми (линия зуба параллельна оси колеса, рис. 3.1, а), косозубыми (рис. 3.1, б), шевронными (рис. 3.1, в) и с арочными (круговыми) зубьями (линия зуба является дугой окружности, рис. 3.1, г, д). 1 Сюда же относят червячные передачи, рассматриваемые в модуле 6, п. 3.2. 51 Косозубые (рис. 3.2, а) и шевронные передачи (рис. 3.2, б) работают более плавно и с меньшим шумом. Недостаток косозубых передач – наличие осевой составляющей силы в зацеплении1. В шевронных передачах эта составляющая равна нулю. а б а Рис. 3.2. Косозубые и шевронные колеса б в Рис. 3.3. Конические колеса 1 2 2 1 Рис. 3.4. Коническая передача Рис. 3.5. Винтовая зубчатая передача 2 1 Рис. 3.6. Гипоидная передача 1 Силы в зацеплении рассматриваются далее в модуле 7. 52 Конические колеса бывают с прямыми (рис. 3.3, а), косыми (рис. 3.3, б) и круговыми (рис. 3.3, в) зубьями. Последние работают более плавно и с меньшим шумом. Наиболее распространены ортогональные (с углом пересечения = 90) передачи (рис. 3.4). Недостатком конических зубчатых пар является необходимость регулирования их положения при сборке. По сравнению с цилиндрическими эти передачи сложнее в изготовлении и обладают меньшей нагрузочной способностью. Передаточное число зубчатой передачи – это отношение чисел зубьев колеса (большего из колес) z 2 к числу зубьев шестерни (меньшего из колес) z1 u= z2 1. z1 (3.1) Передаточное число u и передаточное отношение i12 связаны зависимостью z i12 1 2 u. (3.2) 2 z1 В табл. 3.1 приведены значения передаточных чисел основных типов зубчатых передач [7]. Таблица 3.1 Значения передаточных чисел u и umax Тип передачи Цилиндрическая прямозубая Цилиндрическая косозубая Коническая Винтовая Среднее u umax 3–5 3–6 2–6 2–4 10 15 10 5 3.1.2. Основные определения теории зацепления1 Полюс зацепления. Это точка W на линии центров O1O2 , в которой векторы линейных скоростей зубчатых колес равны (рис. 3.7), т.е. vw1 vw2 . (3.3) 1 См. пособие [7]. 53 Линейные скорости в полюсе , vw 2 O2W , vw1 OW 1 где и – векторы угловых скоростей зубчатых колес; O1W и O2W – отрезки, равные расстояниям от центров колес до полюса (рис. 3.7). 2 O2 vw1 vw2 W O1 1 Рис. 3.7. Полюс зацепления Приравнивая скорости по условию (3.3) друг к другу, получают O2W O1W = . (3.4) Таким образом, полюс зацепления лежит на линии центров O1O2 и делит расстояние O1O2 на отрезки ( O1W и O2W ), обратно пропорциональные модулям угловых скоростей колес. Формулу (3.4) с учетом зависимости (3.2) можно записать еще так: O2W (3.5) i12 u . O1W Основной закон зацепления. Основное требование к зубчатой передаче – это постоянство передаточного отношения: i12 = = const . Для этого необходимо, чтобы выполнялся основной закон зацепления: 54 для сохранения постоянства передаточного отношения необходимо и достаточно, чтобы нормаль NN к профилям зубьев в точке их касания (контакта) пересекала линию центров O1O2 в одной и той же точке в течение всего периода зацепления (т.е. полюс зацепления W занимал бы неизменное положение). Этому закону удовлетворяет множество кривых, которыми очерчивают профиль зубьев. В машиностроении в основном применяют эвольвентное зацепление1. Эвольвентой Э называется кривая, описанная точкой С прямой 1, перекатывающейся по окружности 2 без скольжения (рис. 3.8). Окружность, используемая для образования эвольвенты, называется основной и представляет собой геометрическое место начальных точек эвольвент. Диаметр основной окружности обозначается через d b (см. рис. 3.8). Э С 1 db С С 2 Рис. 3.8. Образование эвольвенты На рис. 3.9 показаны геометрические параметры эвольвентных колес2. Нормаль NN остается неподвижной относительно O1O2 в течение всего периода зацепления пары зубьев, она является геометрическим местом точек контакта сопряженных профилей и называется линией зацепления. Линия зацепления составляет с прямой, пер- 1 Профили зубьев выполнены в виде эвольвент круга. Подробнее об эвольвенте и эвольвентном зацеплении см. в [7]. 2 Индекс 1 принадлежит параметрам шестерни, а индекс 2 – параметрам колеса. 55 пендикулярной линии центров O1O2 , угол . Для эвольвентного зацепления (3.6) αw . Рис. 3.9. Эвольвентное зацепление Начальные окружности. Если передаточное отношение i12 постоянно, то по формуле (3.5) полюс зацепления W занимает неизменное положение на линии центров O1O2 (см. рис. 3.7 и 3.9). С учетом (3.5) это означает, что на зацепляющихся колесах можно построить жестко связанные с ними окружности, которые, во-первых, будут касаться друг друга в точке полюса W и, вовторых, будут перекатываться друг по другу без скольжения. Такие окружности называются начальными (рис. 3.10). Диаметр начальной окружности обозначается dw . Расстояние O1O2 aw 0,5(d w 2 d w1 ) (3.7) называется межосевым расстоянием. В формуле (3.7) знак «+» относится к передачам внешнего зацепления (см. рис. 3.10, а), знак «–» – к передачам внутреннего зацепления (см. рис. 3.10, б и рис. 1.5)1. 1 В дальнейшем, если нет специального указания на вид зацепления, рассматриваются цилиндрические передачи внешнего зацепления. 56 Очевидно, что понятие о начальной окружности для отдельно взятого зубчатого колеса не имеет смысла. Только для пары зацепляющихся колес можно найти положение полюса W и определить диаметры d w1 и d w 2 (см. рис. 3.10). 2 O2 aw d w2 2 O2 W O1 aw d w1 1 O1 1 W а d w2 d w1 б Рис. 3.10. Начальные окружности Сравнивая рис. 3.7 и 3.10 и учитывая выражения (3.5), получают формулу для передаточного отношения: O2W O1W = d w2 i12 u . d w1 (3.8) 3.1.3. Геометрические параметры цилиндрических прямозубых колес. Понятие о модуле зацепления Геометрические параметры цилиндрического прямозубого колеса показаны на рис. 3.11. Габариты зубчатого колеса характеризуются диаметром окружности вершин d a и шириной венца b (см. рис. 3.9 и 3.11); высота зуба, ограниченная окружностью вершин и окружностью впадин с диаметром d f , обозначается буквой h . Зуб состоит из головки высотой ha и ножки высотой h f . 57 Граница между головкой и ножкой зуба (см. рис. 3.9 и 3.11) проходит по делительной окружности, eе диаметр обозначается через d и называется делительным. P e b s hf h ha d f db da d Рис. 3.11. Геометрические параметры зубчатого колеса Еще один важный геометрический параметр – окружной делительный шаг зубьев P (окружной шаг) – расстояние между одноименными профилями соседних зубьев, измеренное по дуге делительной окружности (см. 3.9 и 3.11). Длина делительной окружности l = d , с другой стороны, длина l = P z , где z – число зубьев колеса, отсюда d делительный диаметр Pz , т.е. d mz , (3.9) P . (3.10) где m= Величина m называется окружным делительным модулем зацепления, или просто модулем зацепления (модуль зубьев). Значения m стандартизованы (ГОСТ 9563-60). Для сопряженных колес, нарезаемых так называемым несмещенным инструментом1: 1 Понятие о зубчатых колесах, нарезаемых без смещения см. в модуле 5. 58 – делительные окружности совпадают с начальными, т.е. (см. рис. 3.9 и формулы (3.7) и (3.9)) d w1 d1 mz1 , d w2 = d 2 mz2 ; (3.11) – межосевое расстояние (называется делительным расстоянием): a aw 0,5(d w 2 d w1 ) 0,5(d 2 d1 ) 0,5m( z2 z1 ); (3.12) – толщина зуба s и ширина впадины e , измеренные по дуге делительной окружности, равны друг другу (на рис. 3.11) s e 0,5P 0,5πm . (3.13) Остальные параметры зубчатых колес определяются по ГОСТ 16532-83. Соответствующие зависимости (при коэффициенте высоты головки ha ha / m 1 ) имеют вид: – высота головки и ножки зуба ha m , h f m c m(1+ c ) ; – высота зуба h m(2 c* ) ; – диаметр вершин d a d 2ha m( z 2) ; (3.14) d f d - 2h f m( z - 2 - 2c* ) , (3.15) – диаметр впадин где с – коэффициент радиального зазора, зависит от модуля зацепления m: с* = 0,25 при m 1 мм; с* = 0,35 m < 1 мм. (3.16) * Примеры по темам модуля 4 Пример 1. Определить межосевое расстояние передачи на рис. 3.9, если передаточное число u 6 , а отрезок OW 20 мм. 1 Решение. 1. Определим отрезок O2W , используя формулу (3.5): = 6 20 = 120 мм. O2W u OW 1 59 2. Определим межосевое расстояние O1O2 = O1W + O2W = 20 + 120 = 140 мм. Пример 2. Найти положение полюса W на линии центров O1O2 (см. рис. 3.9), если O1O2 = 100 мм, u = 4. Решение. 1. Составим систему двух уравнений O1W + O2W = 100; O2W O1W = 4. 2. Решая систему методом подстановки, получаем: O1W + 4 O1W = 100, отсюда O1W = 20 мм, O2W = 80 мм (см. рис. 3.9). Пример 3. Имеются зубчатые передачи с одинаковым межосевым расстоянием aw =160 мм. Известны начальные диаметры d w1 шестерен, они составляют 64 мм и 80 мм. Определить: 1) передаточные числа зубчатых передач в случае внешнего зацепления; 2) передаточные числа зубчатых передач в случае внутреннего зацепления. Решение. 1. Рассчитаем начальные диаметры колес d w2 внешнего зацепления (см. рис. 3.10, а и формулу (3.7)): – в первой передаче d w 2 2aw d w1 2 160 64 256 мм; – во второй передаче d w 2 2aw d w1 2 160 80 240 мм. 2. Определим передаточные числа зубчатых пар внешнего зацепления (см. формулу (3.8)): d 256 4; – первой передачи u w2 d w1 64 d 240 3. – второй передачи u w2 d w1 80 60 3. Рассчитаем начальные диаметры колес d w2 внутреннего зацепления (см. рис. 3.10, б и формулу (3.7)): – в первой передаче d w 2 2aw d w1 2 160 64 384 мм; – во второй передаче d w 2 2aw d w1 2 160 80 400 мм. 4. Определим передаточные числа зубчатых пар внутреннего зацепления (см. формулу (3.8)): d 384 6; – первой передачи u w2 d w1 64 d 400 – второй передачи u w2 5. d w1 80 Пример 4. Зубчатый редуктор понижает частоту вращения вала двигателя с 1000 об/мин до 200 об/мин (рис. 3.12). Расстояние между геометрическими осями валов 1 и 2 редуктора aw a 90 мм. Найти делительные диаметры зубчатых колес при условии, что d1 d w1 и d 2 d w2 . Решение. 1. Рассчитаем передаточное число редуктора по формуле (3.2): u i12 1000 5. 200 ИМ 1 2 М Рис. 3.12. Схема привода 2. Для нахождения начальных диаметров составим систему уравнений (см. рис. 3.9) d w2 5; d w1 aw 0,5(d w 2 d w1 ) 90 ; в результате получим d w1 d1 =30 мм, d w2 d 2 =150 мм. 61 Пример 5. Найти межосевое расстояние зубчатой передачи aw a , нарезанной так называемым несмещенным инструментом, если числа зубьев пары 25 и 75, модуль зацепления m = 3 мм. Решение. Межосевое расстояние найдем по формуле (3.12): aw a = 0,5m( z1 z2 ) 0,5 3(25 75) 150 мм. Пример 6. Межосевое расстояние передачи a = 200 мм, u = 4, число зубьев шестерни равно 20. Рассчитать геометрические параметры сопряженных колес, нарезанных без смещения (см. рис. 3.9), используя формулы (3.11)–(3.16). Решение. 1. Определим число зубьев колеса z2 = z1 u 20 4 80 . 2. Рассчитаем модуль зубьев, который выразим из формулы (3.12): a = 0,5m( z1 + z2 ) =200 мм, получим 2a 2 200 m= 4 мм. z1 + z2 20 80 3. Найдем делительные диаметры зубчатой пары: – шестерни d1 = m z1 4 20 80 мм; – колеса d 2 = m z2 4 80 320 мм. 4. Диаметры окружности вершин (см. формулу (3.14)): – шестерни da1 d1 + 2ha m( z1 + 2) = 4 (20 + 2) = 88 мм; – колеса da 2 d2 + 2ha m( z2 + 2) = 4 (80 + 2) = 328 мм. 5. Диаметры окружности впадин (см. формулу (3.15)): – шестерни d f 1 d1 2h f m( z1 2 2c* ) = 4(20 2 2 0, 25) = 70 мм; – колеса d f 2 d2 2h f m( z2 2 2c* ) = 4(80 2 2 0, 25) = 310 мм. 6. Толщина зуба s и ширина впадины e , измеренные по дуге делительной окружности (см. формулу (3.13)): s e = 0,5P = 0,5m = 0,5 мм. 62 Тест по темам модуля 4 1. Какие передачи применяют при параллельных осях валов? 1 2 3 4 Цилиндрические Конические Гипоидные Винтовые 2. Какие передачи применяют при пересекающихся осях валов? 1 2 3 4 Цилиндрические Конические Гипоидные Винтовые 3*. Какие передачи применяют при скрещивающихся осях валов? 1 2 3 4 Цилиндрические Конические Гипоидные Винтовые 4*. По какой формуле можно рассчитать модуль зубьев? 1 m 2 d z 3 d w1 = d1 m= 4 P se 5. Запишите формулу для расчета делительного диаметра шестерни, если известен модуль и число зубьев. 1 m 2 d z 3 d1 = mz1 m= 4 P s e 6. Определите межосевое расстояние a w , если начальные диаметры сопряженных колес d w1 40 мм и d w 2 80 мм. 1 2 3 4 40 мм 80 мм 60 мм 160 мм 7. Чему равно передаточное число пары сопряженных колес, если z1 20 и z2 = 40 ? 1 2 3 4 –2 0,5 –0,5 2 63 8. Определите модуль зацепления передачи, если a 80 мм, u 3, z1 20 . 1 2 3 4 2 1 4 3 9. Определите диаметр вершин колеса, если делительный диаметр d 2 100 , z2 50 . 1 2 3 4 96 95 104 105 10*. Косозубые передачи по сравнению с прямозубыми передачами работают: 1 2 более плавно менее плавно 3 4 с большим шумом с меньшим шумом 11. Основной недостаток конических передач: 1 2 3 4 Непостоянство Низкий Работают передаточного числа КПД с большим шумом Необходимость регулирования при сборке 12. Основной недостаток прямозубых цилиндрических передач: 1 Непостоянство передаточного числа 2 3 Низкий Работают с кпд большим шумом 4 Необходимость регулирования при сборке 13. Определите межосевое расстояние aw a передачи с внутренним зацеплением (см. рисунок), если диаметры сопряженных колес d1 40 мм и d 2 120 мм. 1 2 3 4 40 мм 80 мм 60 мм 160 мм 64 14. При окружном шаге зубчатого колеса P 12,56 мм и числе зубьев z 40 диаметр окружности вершин: 1 2 3 4 86 мм 122 мм 182 мм 168 мм 15. Определите окружную скорость на делительном диаметре зубчатого колеса, если оно вращается с угловой скоростью 8 с–1, модуль m 3 мм, число зубьев z 20 . 1 2 3 4 0,48 м/с 0,24 м/с 240 м/с 480 м/с 65 МОДУЛЬ 5 Тема 3. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 3.1.4. Изготовление зубчатых колес. Способ копирования. Способ обкатки Для изготовления зубчатых колес наибольшее распространение получили два способа – копирование и обкатка. При копировании инструмент имеет профиль, соответствующий профилю впадины изготавливаемого колеса. На рис. 3.13, а показана дисковая фреза, на рис. 3.13, б – пальцевая фреза, режущие кромки которых повторяют профиль впадин. Пальцевую фрезу используют для нарезания крупномодульных зубчатых колес. При обкатке инструмент подобен зубчатому колесу (или рейке), с которым зацепляется нарезаемое колесо, а зубья образуются в процессе обкатки заготовки инструментальным колесом, выбирающим впадины между зубьями (рис. 3.14). а б Рис. 3.13. Метод копирования Рис. 3.14. Метод обкатки По сравнению с копированием способ обкатки намного производительнее: при обкатке без дополнительных остановок заготовки нарезаются все зубья на колесе. Кроме того, одним инструментом можно нарезать все зубчатые колеса данного модуля, какое бы число зубьев они не имели. Достаточно переналадить станок так, чтобы выполнялось условие и / з = zз / zи , (3.17) где – угловая скорость; z – число зубьев; индекс «з» относится к заготовке; индекс «и» относится к инструменту. 66 Недостатком способа обкатки является то, что он реализуется только на специальных станках. В качестве режущего инструмента при обкатке используют колесо-долбяк (см. рис. 3.14), инструментальную рейку (рис. 3.15, а) либо червячную фрезу (рис. 3.15, б). С помощью долбяка нарезают в том числе и колеса с внутренним зацеплением. а б Рис. 3.15. Параметры рейки по ГОСТ 16531-83: hw – глубина захода; с – радиальный зазор; MM – делительная прямая рейки Соотношение (3.17) не зависит от расстояния между рейкой и нарезаемым колесом, поэтому, оставляя зависимость (3.17) неизменной, можно приблизить рейку к заготовке или удалить их друг от друга. Говорят, что колесо нарезано несмещенным инструментом (без смещения), если его делительная окружность касается делительной прямой MM рейки (см. рис. 3.15 и 3.16, а). а б в Рис. 3.16. Схемы нарезания зубчатых колес 67 В противном случае в рассмотрение вводят смещение: X = xm, (3.18) где x – коэффициент смещения; m – модуль зацепления. При этом смещение положительное, т.е. X > 0 (коэффициент смещения х > 0 (рис. 3.16, б)), если по сравнению со смещением X = 0 (рис. 3.16, а) рейка отодвин ута от колеса. Смещение отрицательное, т.е. X < 0 (коэффициент смещения х < 0 (рис. 3.16, в)), если по сравнению со смещением X = 0 (рис. 3.16, а) рейка приближена к колесу. Прямая (н.пр.) на рис. 3.16 (параллельная делительной прямой рейки ММ), которая проходит через полюс зацепления и касается делительной окружности, есть начальная прямая. При приближении рейки к заготовке (см. рис. 3.16, в) может произойти подрезание (рис. 3.17)1. Это проектная ошибка, из-за которой при нарезании методом обкатки у основания зуба не формируется эвольвентный профиль. Подрезание приводит к снижению изгибной выносливости зубьев, уменьшению периода зацепления и поэтому нежелательно. Рис. 3.17. Подрезание зуба колеса Условие отсутствия подрезания зубьев цилиндрического прямозубого колеса2: о z zmin 2(1 x) , sin 2 (3.19) о где z min – минимальное число зубьев колеса, при котором подре- зания уже нет; x – коэффициент смещения; угол . Подрезание зубьев возникает при их изготовлении по методу обкатки, однако условие (3.19) нужно выполнять и в том случае, Точки нарезаемого профиля оказываются внутри основной окружности (см. модуль 4), где эвольвента не существует по построению. 2 Вывод см., например, в пособии [7]. 1 68 когда используют способ копирования, поскольку при числе зубьев, меньшем минимального, происходит заклинивание передачи, и ее работа становится невозможной. Расчеты по формуле (3.19) показывают, что для цилиндрического прямозубого колеса без смещения (x = 0) число зубьев o zmin 17 . (3.20) 3.1.5. Конструкции зубчатых колес и материалы Зубчатые колеса изготавливают обычно отдельно от вала. Если диаметр вершин d a меньше, чем удвоенный диаметр вала d в , колесо изготавливают вместе с валом (вал-шестерня на рис. 3.18). Для соединения валов с установленными на них колесами используют шлицевые (рис. 3.19), шпоночные (рис. 3.20) и штифтовые соединения (рис. 3.21). dв da Рис. 3.18. Вал-шестерня Рис. 3.19. Шлицевое соединение: 1 – вал; 2 – ступица Рис. 3.20. Шпоночное соединение: 1 – вал; 2 – колесо; 3 – шпонка Рис. 3.21. Штифтовое соединение: 1 – вал; 2 – колесо; 3 – штифт Для силовых зубчатых передач в качестве материала чаще всего используют стали. Передачи со стальными зубчатыми колесами имеют минимальную массу и габариты. В зависимости от твердости рабочих поверхностей стальных зубьев различают: 69 – колеса с твердостью по Бринеллю не больше 350 единиц ( 350HB ) – нормализованные, улучшенные1; – колеса с твердостью по Бринеллю больше 350 единиц ( 350HB ) – закаленные, цементированные, нитроцементированные, азотированные, цианированные2. Рекомендации по выбору материала, термической обработки и твердости зубьев приведены, например, в табл. 3.2 [2], [4]. Таблица 3.2 Материалы для зубчатых колес Марка стали 45 40Х 40ХН, 35ХН 40ХН2МА, 38Х2МЮА 20Х, 20ХН2М, 18ХГТ, 12ХН3А, 25ХГР Термообработка Улучшение Улучшение Улучшение Улучшение Улучшение и закалка ТВЧ Улучшение Улучшение Улучшение и закалка ТВЧ Улучшение и азотирование Улучшение, цементация и закалка Твердость зубьев на поверхв сердцевине ности 235–262 НВ 235–262 НВ 269–302 НВ 269–302 НВ 235–262 НВ 235–262НВ 269–302НВ 269–302НВ 269–302НВ 45–58HRC т , МПа 540 650 640 750 750 235–262НВ 269–302НВ 269–302НВ 235–262НВ 269–302НВ 48–55HRC 630 750 750 269–302НВ 58–67HRC 780 300–400НВ 56–63HRC 800 3.1.6. Общие сведения о косозубых передачах Зубчатое колесо с косыми зубьями может быть нарезано в процессе обкатки заготовки инструментальной рейкой. Стандартным является нормальное сечение рейки. Термическая обработка металлов: нормализация, закалка, улучшение. Химико-термическая обработка металлов: цементация, нитроцементация, азотирование, цианирование. 1 2 70 Угол наклона зубьев на делительном цилиндре для косозубых колес лежит в диапазоне от 7 до 25 градусов, для шевронных колес – от 25 до 35 градусов. Из рассмотрения рис. 3.22 видно, что в случае косозубых колес существует три шага – торцовый Pt , нормальный Pn и осевой Px и соответственно три модуля: mt = Pt P P ; mn = n ; mx = x . π (3.21) Из рис. 3.22 получается, что Pt = Pn P ; Px = n , cos sin (3.22) следовательно: mt = mn ; cos mx = mn . sin (3.23) Рис. 3.22. Параметры косозубого колеса Делительный диаметр d Pt zmn . zmt cos Стандартным модулем является модуль mn . 71 (3.24) Подставляя (3.23) и (3.24) в формулу для межосевого расстояния aw сопряженных косозубых колес, нарезаемых несмещенным инструментом, получают aw a 0,5(d2 d1 ) 0,5mt ( z2 z1 ) , или aw a mn ( z2 z1 ) . 2 cos (3.25) Преимущества косозубых передач перед прямозубыми: – косозубые передачи работают более плавно, с меньшим шумом; это объясняется тем, что зубья косозубых колес входят в зацепление постепенно в отличие от прямозубых колес, зубья которых вступают в работу сразу по всей своей длине; – нагрузочная способность косозубых передач выше; – изменяя в формуле (3.25) значения параметров mn , z1 , z2 и , можно косозубую передачу вписать в требуемое межосевое расстояние; – минимальное число зубьев косозубого колеса zmin меньше, чем прямозубого. Связь между ними устанавливается формулой [7] o zmin = zmin cos3 , (3.26) o где z min – минимальное число зубьев прямозубого колеса (см. формулу (3.19)). Основной недостаток косозубых передач – наличие осевой составляющей силы в зацеплении. Этого недостатка лишены шевронные колеса (см. модуль 4, рис. 3.1, в, 3.2, б). Примеры по темам модуля 5 Пример 1. Зубчатое колесо с числом зубьев z = 50 должно быть нарезано способом обкатки. Для этого используют инструмент, который называется долбяк (см. рис. 3.14). Число зубьев долбяка zи = 25. Рассчитать угловую скорость вращения долбяка и , если угловая скорость вращения заготовки колеса з = 0,314 c 1 . 72 Решение. Угловую скорость вращения долбяка определим, используя формулу (3.17): z 50 и 3 3 0,314 0,628 c 1 . zи 25 Пример 2. Используя условие отсутствия подрезания зубьев, рассчитать коэффициент смещения х при нарезании способом обкатки цилиндрического прямозубого колеса с числом зубьев z =10. Решение. Коэффициент смещения х найдем, используя формулу (3.19): xmin 1 z sin 2 1 0,5 10 sin 2 20 0, 416 . 2 Пример 3. На какую величину необходимо отодвинуть рейку от оси колеса (по сравнению со смещением X = 0), чтобы при нарезании способом обкатки цилиндрического прямозубого колеса не произошло подрезания зубьев. Число зубьев колеса z = 15 и модуль m = 5 мм. Решение. 1. Найдем коэффициент смещения х, используя формулу (3.19): xmin 1 z sin 2 1 0,5 12 sin 2 20 0, 298 . 2 2. Определим минимальную величину смещения рейки по формуле (3.18) X min = xmin m = 0,298 5 = 1,49 мм. Пример 4. Для косозубого колеса, нарезаемого без смещения способом обкатки, требуется определить минимальное число зубьев z min из условия отсутствия подрезания. Решение. Минимальное число зубьев косозубого колеса найдем по формуле (3.26) с учетом выражения (3.20) и условия, по которому 7 ≤ ≤ 25 , 73 o z min = zmin cos3 cos3 ; если = 7 , то z min cos3 cos3 7 16,623 17 ; если = 25 , то z min cos3 cos3 25 12,655 13 . Ответ: в зависимости от угла наклона зубьев минимальное число зубьев косозубого колеса изменяется от 17 до 13. Пример 5. Определить геометрические параметры зубчатой передачи с передаточным числом u = 5,5, которую требуется вписать в межосевое расстояние aw = 102 мм. Решение. 1. Назначим число зубьев шестерни с учетом условия отсутствия подрезания, пусть z1 20. 2. Число зубьев колеса z2 z1 u 20 5,5 110 . 3. Используя формулу aw 0,5mt ( z1 z2 ) для косозубой передачи, рассчитаем модуль mt 2aw 2 102 1,569 мм. z1 z2 110 20 4. Из стандарта подберем значение модуля, близкое к рассчитанному в п.3, но чуть меньше: mn 1,5 мм. 5. Используя формулу (3.23), найдем величину угла : = arccos mn 1,5 arccos arccos0,956 17 335. mt 1,569 6. Рассчитаем межосевое расстояние зубчатой передачи: aw mn ( z1 z2 ) 1,5(20 110) 101,955 102 мм. 2cos 2cos17 Ответ: могут быть выбраны следующие параметры колес: z1 20, z2 110, mn 1,5 мм, = 17 335. 74 Тест по темам модуля 5 1. Какой способ нарезания зубчатых колес может привести к подрезанию зубьев? 1 Способ обкатки 2 Способ копирования 2. Каким способом быстрее нарезать зубчатое колесо? 1 Способ обкатки 2 Способ копирования 3. Если при нарезании цилиндрического колеса рейкой (способ обкатки), произошло подрезание зубьев, то число зубьев колеса: 1 zz 2 o min zz 3 zz o min 4 o min o z zmin 4*. Запишите условие отсутствия подрезания зубьев цилиндрического прямозубого колеса, нарезанного несмещенным инструментом (без смещения). 1 zz o min 2 17 zz o min 3 zz 17 4 o min zz o min 17 5. Минимальное число зубьев zmin косозубого колеса ( = 25 ), при котором отсутствует подрезание, по сравнению с прямозубым: 1 меньше 2 больше 3 одинаково 4 такое же 6. Если для нарезания колеса рейка смещается ближе к центру заготовки (по сравнению со смещением X = 0), то смещение 1 X>0 2 X=0 3 X<0 4 X≤0 7. Чему равно передаточное число сопряженной пары: колесодолбяк и колесо, если zи 24 и zз = 36 ? 1 1,5 2 –1,5 3 –0,5 75 4 0,5 8. Чему равно смещение Х, если нарезаемое колесо имеет параметры m 6 мм, x 0,5 ? 1 12 мм 2 –12 мм 3 –3 мм 4 3 мм 9*. В качестве режущего инструмента при обкатке используют: 1 дисковую фрезу 2 червячную фрезу 3 долбяк 4 пальцевую фрезу 10. В качестве режущего инструмента при нарезании зубчатого колеса способом копирования используют: 1 инструментальную рейку 2 червячную фрезу 3 долбяк 4 пальцевую фрезу 11. Если косозубая и прямозубая передачи имеют одинаковые параметры: mn , z1 , z2 , то межосевое расстояние aw меньше: 1 в прямозубой передаче 2 в косозубой передаче 3 межосевое расстояние одинаковое 12*. Шевронные передачи по сравнению с прямозубыми передачами работают: 1 2 менее плавно более плавно 3 с большим шумом 4 с меньшим шумом 13. Зубчатая передача – это: 1 деталь 2 узел 3 механизм 4 машина 14. В случае косозубых колес стандартным модулем зацепления является: 1 осевой модуль 2 торцовый модуль 3 нормальный модуль 4 коэффициент смещения 15*. Косозубые передачи по сравнению с прямозубыми передачами: 1 работают менее плавно 2 работают более плавно 3 работают с меньшим шумом 76 4 не имеют осевой составляющей силы в зацеплении МОДУЛЬ 6 Тема 3. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 3.1.7. Общие сведения о конических зубчатых передачах Конические зубчатые передачи служат для передачи движения между валами, оси которых пересекаются в пространстве (рис. 3.23). В конических передачах аналогами начальных цилиндров цилиндрических передач являются начальные конусы, совпадающие с делительными. Начальные конусы при вращении колес катятся друг по другу без скольжения. На рис. 3.24 показаны пересекающиеся оси ОО1 и ОО2 конических зубчатых колес, начальные конусы и углы при вершинах начальных конусов 1 и 2 . Рис. 3.23. Коническая передача Рис. 3.24. Начальные конусы В полюсе W по определению (см. модуль 4, п. 3.1.2) vw1 = vw2 . Учитывая, что (см. рис. 3.24) vw1 1 O1W 1 OW sin 1 ; vw2 2 O2W 2 OW sin 2 , и приравнивая эти выражения, получают передаточное отношение sin 2 (3.27) i12 1 u, 2 sin 1 где 1 и 2 – углы при вершинах начальных конусов; u – передаточное число. 77 На практике большей частью используют ортогональные передачи, у которых суммарный угол = 90 (рис. 3.25). В этом случае z 1 (3.28) i12 u tg2 2 , tg1 z1 где z1 , z2 – числа зубьев сопряженных колес. Рис. 3.25. Ортогональная коническая передача На рис. 3.26 показаны основные геометрические параметры конической передачи [5], к которым относятся: угол делительного конуса , ширина зубчатого венца b, внешнее делительное конусное расстояние Re, среднее делительное конусное расстояние Rm, внешний делительный диаметр de, средний делительный диаметр dm. Рис. 3.26. Основные геометрические параметры конической передачи 78 Некоторые из указанных величин связаны между собой (см. рис. 3.26): d d (3.29) sin m e , de = mte z, 2Rm 2Re где mte – внешний окружной модуль, который принимают в качестве расчетного для конических зубчатых колес с прямыми зубьями; z – число зубьев. Минимальное число зубьев конического колеса, получаемого способом обкатки без подрезания, равно zmin = 17 cos . (3.30) 3.1.8. Особенности конструкций передач с коническими зубчатыми колесами В конической передаче вершины делительных (начальных) конусов должны находиться в точке пересечения геометрических осей зацепляющихся колес (см. рис. 3.23–3.26). Для нормальной работы зубчатой передачи необходимо выполнение этого условия. Поэтому при сборке предусматривают возможность регулировки осевого положения конических колес. На рис. 3.27, а показана конструкция конического колеса, которое сопрягается с валом с помощью шпонки (см. рис. 3.20). Такое соединение позволяет отрегулировать положение колеса при сборке. а б Рис. 3.27. Коническое колесо: 1 – венец зубчатый; 2 – ступица (опорный центр); 3 – болт; 4 – гайка; 5 – шайба пружинная; 6 –шайба 79 При больших размерах колес для экономии высокопрочной стали применяют конструкцию, состоящую из зубчатого венца 1 и ступицы 2 (рис. 3.27, б). На рис. 3.28 – вал-шестерня 1, установленная на подшипниках качения 7 в стакане 6 [1]. Стакан 6 крепится к корпусу 2 винтами (на рисунке винты не показаны). Между фланцем стакана 6 и стенкой корпуса 2 устанавливают набор прокладок 4. Подбирая прокладки требуемой толщины, можно отрегулировать осевое положение конического колеса. Рис. 3.28. Узел входного вала: 1 – вал-шестерня коническая; 2 – корпус; 3 – крышка подшипника; 4 – прокладки регулировочные; 5 – прокладки; 6 – стакан; 7 – подшипник роликовый конический; 8 – гайка круглая шлицевая; 9 – шайба стопорная многолапчатая; 10 – манжета 3.2. Червячная передача 3.2.1. Общие сведения о червячных передачах Червячные передачи (рис. 3.29) передают движение между валами, оси которых скрещиваются. Угол скрещивания обычно 90(ортогональная передача). Различают цилиндрические червячные передачи (червячные передачи, 80 рис. 3.29, б) и глобоидные червячные передачи (глобоидные передачи, рис. 3.29, в)1. а б в Рис. 3.29. Червячная передача Червяк 1 (см. рис. 3.29, а), изготовленный заодно с валом, вращает червячное колесо 2. Если движение передается от червяка к колесу, то такая передача уменьшает частоту вращения выходного вала. Передаточное отношение z (3.31) i12 1 2 1 , 2 z1 где z1 – число витков (число заходов) червяка; z 2 – число зубьев червячного колеса. Движение от червячного колеса к червяку происходит с увеличением частоты вращения выходного вала, в этом случае i21 2 z1 1. 1 z2 Существует возможность создания червячной передачи, в которой движение передается только от червяка к колесу, такая передача обладает свойством самоторможения2. Это важное свойство используют, например, в грузоподъемных устройствах. Число витков стандартного червяка не превышает четырех ( z1 = 1 или 2, или 4), поэтому (при сравнительно небольших габаритах передачи) можно получить большие передаточные отношеГОСТ 18498-89. Передачи червячные. Термины, определения и обозначения. Причина невозможности передачи движения от червячного колеса к червяку заключается в том, что относительному движению в контакте «червяк–червячное колесо» препятствует сила трения скольжения. 1 2 81 ния (см. формулу 3.31); диапазон передаточных отношений: i12 = 8...80, максимальные значения imax 500. К достоинствам червячной передачи относят: – большие передаточные отношения; – возможность самоторможения; – плавность и бесшумность работы. Основными недостатками червячной передачи являются: – большие потери на трение скольжения в зацеплении; – низкий КПД (на 20–30% ниже, чем у зубчатых передач); – износ и нагрев передачи; – необходимость применения дорогих антифрикционных материалов пары1. При проектировании червячной передачи обязательно выполняют тепловой расчет [5]. Червяки изготавливают из стали, зубчатые венцы червячных колес – из бронзы различных марок (для уменьшения коэффициента трения скольжения в контакте «червяк – червячное колесо»), реже – из чугуна (в механизмах с ручным приводом). Червячные передачи находят широкое применение, например, в металлорежущих станках, подъемно-транспортном оборудовании, транспортных машинах, а также в приборостроении. 3.2.2. Особенности геометрии червяка Червяк, как и винт (см. рис. 2.3, 2.4), характеризуется шагом P и ходом Pz , которые связаны соотношением Pz P z1 , где шаг P = m; m – осевой модуль (выбирают из стандарта); z1 – число витков (заходов) червяка, равное числу винтовых линий на делительном цилиндре (на рис. 3.30, а число витков или заходов z1 = 1, на рис 3.30, б z1 2 ). 1 Группа материалов, обладающих низким коэффициентом трения. 82 В зависимости от формы профиля витка 1 различают: – архимедов червяк (ZA) (рис. 3.31, а) — цилиндрический червяк, торцовый профиль витка которого является архимедовой спиралью. Этот червяк подобен винту с трапецеидальной резьбой (см. рис. 2.5); – эвольвентный червяк (ZI) (рис. 3.31, б); имеет эвольвентный профиль витка в его торцовом сечении (как у косозубого колеса); – конволютный червяк (ZN); торцовый профиль витка является удлиненной или укороченной эвольвентой. а б Рис. 3.30. Схемы червяка: – угол профиля витка а б Рис. 3.31. Конструкции цилиндрических червяков: а – архимедов; б – эвольвентный В машиностроении из цилиндрических червяков наиболее распространены архимедовы червяки. 1 Червячные передачи бывают с линейчатыми (архимедовы, эвольвентные, конволютные) червяками и нелинейчатыми (образованы тором) червяками [5]. 83 Диаметр делительной окружности (диаметр делительного цилиндра на рис. 3.32, а) d1 q m , (3.32) где q 7 – коэффициент диаметра червяка (табл. 3.3); m – осевой модуль выбирают из стандарта. Таблица 3.3 Значения коэффициента диаметра червяка q 1-й ряд 8 10 12,5 16 20 25 2-й ряд 7,1 9 11,2 14 18 22,4 Делительный угол подъема витка червяка (см. рис. 3.30): tg P z1 m z1 z1 Pz . d1 q m q m q (3.33) а б Рис. 3.32. Червячная передача: а – без смещения; б – схема создания передачи со смещением [5] Для червяка в передаче со смещением дополнительно вычисляют: – диаметр начального цилиндра (начальный диаметр) dw1 m(q 2x); 84 – угол подъема линии витка на начальном цилиндре z1 Pz , tg w d w1 q 2 x где x – коэффициент смещения (рис. 3.32, б). Условие самоторможения w , (3.34) где – приведенный угол трения для пары сталь–бронза; начальный угол w arctg(z1 / q 2 x) . Свойством самоторможения могут обладать передачи, в которых угол подъема витка червяка не превышает 5...6, т.е. передачи с однозаходным червяком ( z1 1) . 3.2.3. Геометрические соотношения в червячной передаче Для червячной передачи, нарезанной без смещения, т.е. x 0, (см. рис. 3.32): – делительные диаметры червяка и червячного колеса d1 qm и d2 z2m , где z2 – число зубьев червячного колеса; – межосевое расстояние aw a 0,5(d1 d2 ) 0,5m(q z2 ); (3.35) – диаметры окружности вершин витков червяка и зубьев червячного колеса da1 d1 2ha m(q 2); da 2 d2 2ha m( z2 2) ; – диаметры окружности впадин витков червяка и зубьев червячного колеса d f 1 d1 2h f m(q 2, 4) ; d f 2 d 2 2h f m( z2 2, 4) ; 85 – наибольший диаметр червячного колеса (см. рис. 3.32, 3.34) dae 2 da 2 6m , z1 k где k зависит от типа червяка (k 2 для передач с эвольвентным червяком); – ширина b2 венца червячного колеса зависит от числа витков червяка b2 0, 75d a1 при z1 1 или 2; b2 0, 67 d a1 при z1 4. 3.2.4. Скольжение в червячной передаче При работе червячной передачи витки червяка скользят по зубьям червячного колеса. Скорость скольжения (рис. 3.33) [5], направленная по касательной к линии витка червяка, vск v12 v22 v1 , cos w (3.36) где v1 0,5d11 , v2 0,5d 2 2 – окружные скорости червяка и колеса, м/с. Зуб колеса Виток колеса . Рис. 3.33. Скольжение в червячной передаче Очевидно, что всегда скорость скольжения vск v1 . Скольжение в червячной передаче вызывает значительные потери в зацеплении, нагрев передачи, изнашивание зубьев червячного колеса, увеличивает склонность к заеданию. 86 3.2.5. Особенности конструкции червячного колеса Для уменьшения трения скольжения в зацеплении при стальном червяке обычно используют составное червячное колесо с зубчатым венцом из бронзы и ступицей из стали (рис. 3.34). а б в Рис. 3.34. Червяное колесо: 1 – венец зубчатый; 2 - ступица Таким образом, червячное колесо – это сборочная единица. Способы крепления венца: – привернутый венец – крепление венца к ступице болтами за фланец (рис. 3.34, а); – напрессованный венец – посадка с натягом и стопорение винтами для предотвращения взаимного смещения венца и ступицы (рис. 3.34, б); – отлитый венец – литье в кольцевую канавку ступицы (рис. 3.34, в) [5]. Эту конструкцию применяют в серийном и массовом производстве. Крепление венца к ступице должно обеспечивать фиксацию как от проворота, так и от осевого смещения венца относительно ступицы. Примеры по темам модуля 6 Пример 1. Определить передаточное отношение ортогональной конической передачи (см. рис. 3.26), если 1 = 30. Решение. Для нахождения передаточного отношения ортогональной конической передачи используем формулу (3.28). 87 Если ведущей является шестерня (передача уменьшает частоту вращения выходного вала – понижающая передача), то 1 1 i12 3 1,73 . tg1 tg30 Если ведущим является колесо (передача увеличивает частоту вращения вала – повышающая передача), то 1 tg30 i21 0,58 . i12 1 Пример 2. Для проектирования конической ортогональной передачи с передаточным числом u = 2 определить минимальное число зубьев z1min конической шестерни. Решение. 1. Для расчета минимального числа зубьев по формуле (3.30) найдем угол делительного конуса (см. рис. 3.26) шестерни, используя формулу (3.28) 1 1 1 arctg arctg 26,6 . u 2 2. Минимальное число зубьев без подрезания z1min = 17 cos 1 17 cos 26,6 15, 2 16. Следовательно, при проектировании передачи необходимо учесть, что для конической шестерни минимальное число зубьев z1min из условия отсутствия подрезания равно 16. Пример 3. Для точной настройки прибора используют червячную передачу с передаточным отношением i12 360 . Определить угол поворота червячного колеса, если вал червяка повернули на угол 1 1 . Решение. Передаточное отношение червячной передачи i12 1 . 2 Учитывая, что угловая скорость 1 d1 d 2 , , 2 dt dt 88 где и – углы поворота червяка и червячного колеса, получим d i12 1 . 2 d Из последнего выражения получим угол поворота червячного колеса 1 1 60' 60'' 10'' , i12 360 следовательно, колесо повернется на 10 угловых секунд. Пример 4. Определить, обладает ли самоторможением червячная передача с параметрами: z1 1 , q 8 , m 6 , x 0 . Приведенный угол трения ' 5 . Решение. 1. Угол подъема витка червяка из формулы (3.33) z 1 arctg 1 arctg 7,13 ; q 8 5 7,13 , следовательно, условие самоторможения не выполнено (см. формулу (3.34)). 4. Для обеспечения самоторможения необходимо, чтобы 5 , z 1 q 1 11, 4 . т.е. tg tg5 Из табл. 3.3 выбираем q 12,5 . Пример 5. Определить скорость скольжения в червячной передаче с параметрами: z1 2 , q 10 , m 5 , x 0 . Частота вращения вала червяка n1 = 1600 об/мин. Решение. 1. Угол подъема витка червяка из формулы (3.33) arctg z1 2 arctg 11,3 . q 10 89 2. Скорость скольжения найдем по формуле (3.36) с учетом выражения (3.32): vск v1 0,5d11 0,5mqn1 0,5 5 10 103 1600 4,3 м/с. cos cos 30cos 30cos11,3 Тест по темам модуля 6 1. Передачи с коническими колесами применяют при: 1 параллельных осях валов 2 пересекающихся осях валов 3 скрещивающихся осях валов 2*. Запишите формулы, по которым можно найти передаточное отношение конической передачи: 1 2 3 4 i12 z2 / z1 i21 z1 / z2 i12 ω1 / ω2 i12 sin 2 / sin 1 3*. Найти передаточное отношение ортогональной конической передачи, если tg2 = 2: 1 –2 2 2 3 0,5 4 –0,5 4. Минимальное число зубьев конического колеса, при котором отсутствует подрезание: 1 2 3 17 cos больше 17 всегда равно 17 зубьям 5. Червячные передачи применяют при: 1 2 3 параллельных осях валов пересекающихся осях валов скрещивающихся осях валов 6. Межосевое расстояние червячной передачи при m 8 мм, z1 1 , z 2 40 равно: 1 160 мм 2 200 мм 3 400 мм 90 q 10 , 4 164 мм 7. Делительный диаметр червяка: 1 2 3 4 z1 = z2 / u d 2 = mz2 d1 = mz1 d1 qm 8. Делительный диаметр червячного колеса: 1 2 3 4 z1 = z2 / u d 2 = mz2 d1 = mz1 d1 qm 9*. Передаточное отношение червячной передачи: 1 2 3 4 i12 = 1 / 2 i21 z1 / z2 i12 z2 / z1 z1 = z2 / u 10*. Следствием больших потерь на трение скольжения в зацеплении червячной передачи являются: 1 плавность работы 2 нагрев 3 низкий КПД 4 бесшумность работы 11. Возможностью самоторможения может обладать червячная передача с червяком, который имеет число витков: 1 2 3 4 с любым числом витков z1 2 z1 1 z1 4 12*. Червячный редуктор показан: Рис. 1 Рис. 2 Рис. 3 Рис. 4 1 2 3 4 на рис. 1 на рис. 2 на рис. 3 на рис. 4 91 13. Одним из основных геометрических параметров конической зубчатой передачи является: 1 2 3 4 межосевое расстояние осевой модуль коэффициент смещения внешнее конусное расстояние 14. Основным недостатком конической передачи является: 1 2 3 4 низкий КПД сложность изготовления и монтажа антифрикционные материалы пары сложность расчетов 15. Тепловой расчет следует обязательно выполнять для: 1 2 3 4 цилиндрической конической винтовой зубчатой червячной передачи передачи передачи передачи 16. Червячная передача будет работать с ручным приводом, поэтому червячное колесо рационально сделать из: 1 2 3 4 бронзы латуни чугуна стали 92 МОДУЛЬ 7 Тема 3. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 3.3. Силы в зацеплении зубчатых и червячных передач 3.3.1. Силы в зацеплении прямозубых цилиндрических передач В процессе работы зубчатой передачи к валу ведущего колеса 1 приложен движущий момент Т1, а к валу ведомого колеса 2 – момент сопротивления Т2, направленный против угловой скорости вращения вала 2 (рис. 3.35). Силы в зацеплении цилиндрических передач определяют, пренебрегая силами трения (из-за их малости). Нормальную силу в зацеплении Fn , действующую в контакте зубьев1 и направленную по линии зацепления NN, прикладывают в полюсе зацепления W и раскладывают на окружную Ft и радиальную Fr составляющие (рис.3.36): Fn Ft Fr . (3.37) T1 1 y Fr Ft W x z Ft Fr T2 2 Рис. 3.35. Нормальная сила Рис. 3.36. Силы в зацеплении Распределенную по контактным линиям удельную нагрузку заменяют равнодействующей Fn . 1 93 По известному моменту Т1 и диаметру d1 колеса 1 (шестерни) (см. рис. 3.35) определяют1: – окружную силу 2T 2T Ft 1 1 ; d w1 d1 – радиальную силу Fr Ft tg , где 20 ; Ft . cos За расчетную нагрузку принимают силу KFt 2 KT1 , Fn расч KFn cos d1 cos нормальная сила в зацеплении Fn (3.37а) где коэффициент нагрузки K K K v , (3.38) K 1 – коэффициент концентрации нагрузки, который учитывает неравномерность распределения нагрузки по линии контакта в результате перекоса и деформации валов; Kv 1 – коэффициент динамической нагрузки, который обусловлен неточностью изготовления зубчатой пары2. Для снижения значения коэффициента K следует располагать колеса симметрично относительно опор, увеличивать жесткость зубчатых колес, валов, опор (применять роликовые подшипники вместо шариковых), повышать точность изготовления зубчатых колес. 3.3.2. Силы в зацеплении косозубых цилиндрических передач В косозубой передаче зубья развернуты на угол (см. модуль 5, п. 3.1.6), поэтому нормальная сила в зацеплении Fn приобретает составляющую вдоль оси колеса Fа (рис. 3.37, 3.38). 1 При расчете сил рассматривают зубчатые колеса без смещения. 2 Более подробно о коэффициентах K и K v см. [3], [4]. 94 Силу Fn Ft Fr Fa (3.39) раскладывают на три составляющих: – окружную силу Ft 2T1 / d1 ; – осевую силу Fа Ft tg , – угол наклона зубьев; – радиальную силу Fr = Ft tg / cos , 20 – угол зацепления. T1 1 y Ft Fr Ft z Fa W Fr T2 Рис. 3.37. Силы в зацеплении x Fa 2 Рис. 3.38. Составляющие нормальной силы Нормальная расчетная сила Fn расч KFn где K 2 KT1 KFt , cos cos d1 cos cos K K v (см. формулу (3.38)). 3.3.3. Силы в зацеплении конических передач В зацеплении прямозубых конических передач (рис. 3.39) действует нормальная сила Fn Ft1 Fr1 Fa1 , которую раскладывают на три составляющих1: 1 Более подробно в [3], [5]. 95 (3.40) – окружную силу на среднем диаметре шестерни Ft1 2T1 / dm1 Ft 2 Ft , где средний делительный диаметр dm1 0,857de1 , d e1 mte z1 – делительный диаметр шестерни; – осевую силу на шестерне, равную радиальной силе на колесе, Fа1 Ft tg sin 1 Fr 2 , где угол зацепления 20 , 1 – угол делительного конуса шестерни; – радиальную силу на шестерне, равную осевой силе на колесе, Fr1 Ft tg cos 1 Fa 2 . Рис. 3.39. Силы в зацеплении конической передачи Нормальная расчетная сила Fn расч KFn где K 2 KT1 KFt , cos d1 cos K K v (см. формулу (3.38)). 3.3.4. Силы в зацеплении червячных передач В зацеплении червячных передач (рис. 3.40) действует нормальная сила Fn Ft1 Fr1 Fa1 , 96 (3.41) которую раскладывают на три составляющих1: – окружную силу на червяке, равную осевой силе на колесе, Ft1 2T1 / d1 Fa2 , где d1 qm – делительный диаметр червяка; – осевую силу на червяке, равную окружной силе на колесе: Fа1 Ft 2 2T2 / d 2 , где T2 – вращающий момент на червячном колесе, d 2 mz2 – делительный диаметр колеса; – радиальную силу Fr1 = Fr 2 Ft 2 tg , где 20 для линейчатых и 22 для нелинейчатых червяков. Рис. 3.40. Силы в зацеплении червячной передачи В зацеплении червячных передач осевая сила на червяке Fа1 является наибольшей из всех составляющих сил. Нормальная расчетная сила Fn расч где K KFt 2 2 KT2 , cos cos w d 2 cos cos w K K v (см. формулу (3.38)), w – угол подъема линии вит- ка на начальном цилиндре (см. модуль 6, п. 3.2.2). 1 Более подробно в [3], [5]. 97 3.4. Критерии работоспособности зубчатых и червячных передач. Расчеты на прочность 3.4.1. Виды разрушения зубьев Основные причины выхода из строя зубчатых и червячных передач заключаются в действии переменных напряжений на зуб и сил трения в зацеплении: – переменные контактные напряжения вызывают выкрашивание поверхности (питтинг) зубьев (рис. 3.41); Рис. 3.41. Выкрашивание поверхности червячного колеса – переменные напряжения изгиба могут привести к поломке зубьев или витков (рис.3.42); Рис. 3.42. Поломка зуба колеса – рабочие поверхности зубьев длительно работающей открытой передачи подвергаются абразивному изнашиванию (рис. 3.43). В основании зуба эвольвентной передачи появляется «ступенька износа» (см. рис. 3.43). 98 Рис. 3.43. Изношенные зубья чугунного колеса У изношенной передачи увеличиваются зазоры в зацеплении, появляется шум, прочность изношенного зуба понижается; – в высоконагруженных и высокоскоростных передачах может наблюдаться заедание. В месте соприкосновения зубьев происходит как бы сваривание частиц металла с последующим их отрывом. На поверхности зубьев видны полосы – задиры. Опасность заедания велика в червячных передачах. 3.4.2. Основные критерии работоспособности Усталостное выкрашивание от контактных напряжений является основным видом разрушения поверхности зубьев при хорошей смазке закрытых зубчатых передач. В качестве основных критериев работоспособности при расчете закрытых зубчатых и червячных передач выбирают два. Условие контактной выносливости: Н H 1. (3.42) Максимальные контактные напряжения зубьев не должны превышать допускаемые контактные напряжения. Условие изгибной выносливости: F F . (3.43) Максимальные изгибные напряжения зубьев не должны превышать допускаемые изгибные напряжения. Индекс H (аш) в обозначении Н присвоен в честь Генриха Герца (H. Hertz), который решил задачу о контакте двух цилиндров. 1 99 3.4.3. Допускаемые контактные и изгибные напряжения Для расчетов зубчатых колес на контактную и изгибную выносливость необходимо выбрать материал колес и определить допускаемые напряжения. Зубчатые колеса чаще всего изготавливают из стали с твердостью HB 235...302 на поверхности зубьев (см. табл. 3.2, модуль 5). Допускаемые контактные напряжения H и напряжения изгиба F определяют по формулам: H lim SH K HL и F F lim K FC K FL , SF (3.44) где H lim и F lim – пределы контактной и изгибной выносливости, которые вычисляют по эмпирическим формулам в зависимости от твердости материала; S H и S F – коэффициенты запаса прочности; K HL и K FL – коэффициенты долговечности, учитывающие влияние срока службы; KFC – коэффициент, учитывающий влияние двустороннего приложения нагрузки (при одностороннем приложении нагрузки K FC 1 , при реверсе – K FC 0,8 ). Коэффициенты K HL и K FL зависят от соотношения между фактическим числом циклов нагружения N зуба колеса и базовым числом циклов NH 0 или N F 0 (табл. 3.4), которое соответствует перелому кривой усталости1. Таблица 3.4 Коэффициенты K HL и K FL N NH 0 K HL 1 N NH 0 K HL 6 N NF 0 NH 0 2, 6 N K FL 1 N NF 0 K FL 6 NF 0 4 N Фактическое число циклов при постоянном режиме нагрузки N 60nct , (3.45) 1 Для длительно работающих передач см. зависимость в работе [2]. 100 где n – частота вращения колеса, для которого определяют допускаемое напряжение, об/мин; c – число зацеплений зуба за один оборот колеса; t – срок службы, ч. Представленные в табл. 3.4 соотношения верны для улучшенных зубчатых колес (термообработка – улучшение). Для стальных зубчатых колес с твердостью < 350 НВ [2]: – пределы выносливости H lim (2HB 70) МПа и F lim 1,75HB МПа; (3.46) – коэффициенты запаса прочности S H 1.1 и S F 1.7 ; (3.47) – числа циклов 2,4 N H 0 30HBср 2 107 и NF 0 4 106 . (3.48) Примеры по темам модуля 7 Пример 1. Определить нормальные силы и расчетные нагрузки в зацеплении зубчатых пар цилиндрического редуктора (рис. 3.44). Делительные диаметры прямозубых шестерен d1I 40 мм, d1II 60 мм. Коэффициент Kv 1,1 . Коэффициент K 1,5 для несимметрично расположенных ступеней, K 1,3 для симметрично расположенных ступеней. Моменты на валах: T1 23 Нм, T2 109 Нм. Рис. 3.44. Редуктор Решение. 1. Нормальная сила в зацеплении пары I определяется по формуле (3.37а) с учетом того, что шестерня пары I установлена на валу 1 (см. рис. 3.44): 2T 2 23 FnI I 1 1220H 1,22 кН . d1 cos 40 103 cos 20 101 2. Нормальная сила в зацеплении пары II определяется с учетом того, что шестерня этой пары установлена на валу 2 (см. рис. 3.44): FnII 2T2 2 109 3870 Н 3,87 кН . d cos 60 103 cos 20 II 1 3. Расчетная нагрузка в зацеплении пары I определяется по формуле (3.37а) с учетом (3.38) при несимметричном расположении передачи относительно опор FnIрасч K Kv FnI 1,5 1,11220 2010H 2,01 кН . 4. Расчетная нагрузка в зацеплении пары II определяется по формуле (3.37а) с учетом (3.38) при несимметричном расположении передачи относительно опор: FnIIрасч K Kv FnII 1,5 1,1 3870 6390H 6,39 кН . Пример 2. На рис. 3.45 приведены шевронные зубчатые колеса. Найти составляющие нормальной силы в зацеплении зубьев, если момент на валу шестерни T1 50 Нм, делительный диаметр d1 40 мм, угол наклона зубьев 25 . Рис. 3.45. Шевронные колеса Решение. 1. На рис. 3.45 показаны составляющие нормальной силы в зацеплении шевронных колес. Осевые силы, действующие на каждую половину шеврона, уравновешиваются, следовательно Fа 0 . 102 2. Окружные силы определяются так же, как для цилиндрических косозубых передач (см. выражение (3.39)): Ft 2T1 2 50 103 2500 Н = 2,5 кН. d1 40 3. Радиальные силы (см. выражение (3.39)) Fr Ft tg 2500tg20 1480 Н = 1,48 кН. cos cos 25 Пример 3. Определить допускаемые контактные напряжения для цилиндрической прямозубой передачи из стали 45 (ГОСТ 1050-88), если частота вращения вала шестерни n1 1600 об/мин, u 4 , срок службы t 8000 часов. Решение. 1. Найдем число циклов N 2 нагружения зуба колеса по (3.45): 60n1ct 60 1600 8000 1,92 108 . u 4 2. Определим коэффициент долговечности, учитывая, что N 2 1,92 108 N H 0 2 107 , поэтому (см. табл. 3.4) N2 60n2ct K HL 1 . 3. Рассчитаем предел выносливости по (3.46), выбрав для зубьев колеса (сталь 45) твердость 235НВ (см. табл. 3.2): H lim (2HB 70) = (2 235+70) = 540 МПа. 4. Допускаемое контактное напряжение для зубьев колеса (см. lim 540 формулу (3.44)) H K HL 491 МПа. SH 1,1 5. Повторим расчет допускаемого контактного напряжения для зубьев шестерни, учитывая следующее: а) так как n1 1600 об/мин > n2 1600 / 4 400 об/мин, то N H 0 N 2 N1 , отсюда N H 0 N1 и (см. табл. 3.4) K HL 1 ; б) шестерня вращается быстрее колеса, следовательно, испытывает большие динамические нагрузки, поэтому назначим твер- 103 дость (из табл. 3.2) зубьев шестерни выше, чем твердость зубьев колеса, 269 НВ: (2 269+70) 553 МПа. H H lim K HL SH 1,1 6. Окончательно выбираем меньшее из двух значений: H 491 МПа. Пример 4. Определить составляющие нормальной силы в зацеплении червячной передачи (см. п. 3.3.4): d 2 400 мм, d1 100 мм, T2 1200 Нм, T1 70 Нм, x 0 , 20 . Решение. 1. Окружная сила на червяке, равная осевой силе на колесе, Ft1 Fa 2 2T1 2 70 103 1400 Н = 1,4 кН. d1 100 2. Осевая сила на червяке, равная окружной силе на колесе, 2T2 2 1200 103 6000 Н = 6 кН. d2 400 3. Радиальная сила Fr1 = Fr 2 Ft 2 tg 6 tg 20 2,18 кН. Fa1 Ft 2 Тест по темам модуля 7 1. Механическая передача – это: 1 деталь 2 узел 3 передаточный механизм 4 машина 2*. Нормальная сила в контакте шевронных цилиндрических колес, приложенная в полюсе зацепления, раскладывается на составляющие (не равные нулю): 1 продольную силу 2 осевую силу 3 радиальную силу 104 4 окружную силу 3*. Нормальная сила в зацеплении прямозубых цилиндрических передач, приложенная в полюсе, раскладывается на составляющие: 1 осевую силу 2 радиальную силу 3 окружную силу 4 перерезывающую силу 4*. Нормальная сила в контакте прямозубых конических передач, приложенная в полюсе зацепления, раскладывается на составляющие: 1 осевую силу 2 радиальную силу 3 окружную силу 4 перерезывающую силу 5*. Нормальная сила в контакте червячной передачи, приложенная в полюсе зацепления, раскладывается на составляющие: 1 продольную силу 2 осевую силу 3 радиальную силу 4 окружную силу 6. Основной вид разрушения поверхности зубьев при работе закрытых зубчатых передач со смазкой: 1 поломка 2 выкрашивание 3 износ 4 заедание 7*. Нормальная сила в контакте косозубых цилиндрических передач, приложенная в полюсе зацепления, раскладывается на составляющие: 1 осевую силу 2 радиальную силу 3 окружную силу 4 перерезывающую силу 8. Условие контактной выносливости зубьев колес имеет вид: 1 2 3 4 и к F F H H 105 9. Условие изгибной выносливости зубьев колес имеет вид: 1 2 3 4 и к F F H H 10. Критерии работоспособности цилиндрических зубчатых передач – это: 1 прочность, жесткость 2 прочность, износостойкость, теплостойкость 3 4 прочность, износо- контактная и изстойкость, устойгибная выносчивость ливость зубьев 11. Критерии работоспособности червячных передач: 1 2 прочпрочность, изность, носостойкость, жесткость теплостойкость 3 прочность, износостойкость, устойчивость 4 контактная и изгибная выносливость зубьев, предотвращение заедания 12. Критерии работоспособности конических зубчатых передач – это: 1 2 прочность, прочность, износожесткость стойкость, теплостойкость 3 износостойкость, прочность, устойчивость 4 контактная и изгибная выносливость зубьев 13. Критерии работоспособности передачи винт-гайка – это: 1 2 прочность, прочность, износожесткость стойкость, теплостойкость 3 4 износостойкость, контактная и изгибная вынослипрочность вость зубьев 14. В зацеплении червячной передачи из составляющих нормальной силы, приложенных к червяку, наибольшее значение имеет: 1 окружная сила на колесе 2 осевая сила на червяке 3 осевая сила на колесе 106 4 окружная сила на червяке МОДУЛЬ 8 Тема 3. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 3.4.4. Расчет зубьев на контактную выносливость. Максимальные контактные напряжения Расчет контактных напряжений принято выполнять при контакте зубьев в полюсе зацепления W (рис. 3.46). Рис. 3.46. Напряжение в контакте зубьев При этом максимальные контактные напряжения в контакте зубчатых и червячных передач определяют по формуле1 (см. рис. 3.46): H 0,418 qEпр пр , (3.49) 1 Формула вытекает из решения задачи о контакте двух цилиндров, полученного Г. Герцем [3]. 107 где q – нагрузка на единицу длины линии контакта, Н/м; Eпр – приведенный модуль упругости, характеризует упругие свойства материала сопряженной пары, Па; пр – приведенный радиус кривизны сопряженных профилей в точке контакта (точка W ), м. 3.4.5.Условие контактной выносливости для зубьев цилиндрических передач Формулу (3.49) применяют для расчета максимальных контактных напряжений для зубьев цилиндрических прямозубых передач (см. рис. 3.46). Нагрузка на единицу длины линии контакта зубьев в формуле (3.49) Fn расч Fn K H K Hv K H Ft 2 K H T1 q , (3.50) bw bw bw cos w bw d w1 cos w где Fn расч – расчетная нормальная сила, которая определяется по формуле (3.37); K H K H K Hv – коэффициент нагрузки (см. п. 3.3.1), индекс «Н» относится к расчету контактных напряжений; bw – длина контактной линии; начальный диаметр шестерни d w1 d1 ; начальный угол w 20 (см. рис. 3.46). Приведенный модуль упругости в формуле (3.49) Eпр 2E1E2 , E1 E2 (3.51) где E1 и E2 – модули упругости материала зубьев шестерни и колеса. Радиусы 1 и 2 кривизны эвольвент зубьев в точке контакта W (см. рис. 3.46): 1 0,5d w1 sin w , 2 0,5d w2 sin w . Приведенная кривизна 1 1 1 2 2 пр 1 2 d w1 sin w d w2 sin w 2 2 1 u 1 1 , d w1 sin w u d w1 sin w u 108 (3.52) где начальный диаметр колеса d w2 d w1 u , u – передаточное число пары; знак «+» – для внешнего зацепления (как на рис. 3.46), знак «–» – для внутреннего зацепления. Подставляя в формулу (3.49) выражения (3.50)–(3.52), получают H 0, 418 qEпр пр 0, 418 16 K H T1E1E2 u 1 . 2 bw d1 ( E1 E2 )sin 2 u (3.53) Формулу (3.53) используют для проверочного расчета, когда все необходимые размеры и другие параметры зубчатой передачи известны. Для расчета контактной выносливости зубьев: – учитывают, что для стальных зубчатых колес E1 E2 2,1 105 МПа; – выражают из зависимости для межосевого расстояния aw 0,5(d 2 d1 ) 0,5(ud1 d1 ) 0,5d1 (u 1) , делительный диаметр шестерни d1 2aw (u 1) (3.54) и подставляют в (3.53); – так как значение момента T2 на ведомом валу (на валу колеса) является одной из основных характеристик передачи (интересующих потребителя), поэтому T1 выражают через T2 , используя зависимость T2 T1u 1 (см. далее параграф 8.1). В результате получают условие контактной выносливости для проверочного расчета H 315 K H T2 (u 1)3 H , awu bw (3.55) где H и H – максимальное контактное напряжение и допускаемое контактное напряжение (см. формулу (3.44) в Модуле 7), 1При расчете сил в зацеплении пренебрегают силами трения, т.е. КПД принимают равным единице (см. модуль 7). 109 МПа; aw – в мм; u – передаточное число; момент T2 – в Нмм; bw – ширина венца колеса, мм; K H K H , при симметричном расположении зубчатой пары относительно опор K H = 1,3, при несимметричном расположении – K H = 1,5. 3.4.6. Проектировочный расчет цилиндрической передачи из условия контактной выносливости зубьев При проектировочном расчете необходимо определить размеры передачи по заданным основным характеристикам: вращающему моменту T2 и передаточному числу u . Решая условие (3.53) относительно межосевого расстояния, вводя коэффициент относительной ширины колеса ba bw / aw , после преобразований получают1: aw K a (u 1) 3 K H T2 2H u 2ba , (3.56) где K a – вспомогательный коэффициент, для стальных прямозубых колес K a 490(МПа )1/ 3 , для косозубых – K a 430(МПа )1/ 3 ; ba = 0,25; 0,315; 0,4 для первой ступени редуктора, ba = 0,4; 0,5; 0,63 для второй и следующих ступеней; T2 – в Нм; H – в МПа; aw – в мм. 3.4.7. Расчет зубьев на изгибную выносливость Наиболее опасное положение нормальной силы соответствует контактной точке, лежащей на окружности вершин (рис. 3.47). Силу Fn переносят в точку О и раскладывают на окружную Ft и радиальную Fr : сила Ft изгибает зуб, сила Fr сжимает его 1 Формула приведена в приложении к ГОСТ 21354-87 для стальных зубчатых колес. 110 (рис. 3.47). На практике трещины усталостного разрушения появляются у основания зуба на растянутой стороне (рис. 3.48). Рис. 3.47. Нормальная сила Рис. 3.48. Эпюры напряжений В опасном сечении (см. рис. 3.47 и 3.48): – напряжения сжатия F tg w F сж r t , A bw S (3.57) где A – площадь сечения в основании зуба; – наибольшие напряжения изгиба из Ft l Ми , W bw S 2 / 6 (3.58) где М и – изгибающий момент вычисляется у основания зуба; W – момент сопротивления сечения при изгибе. 111 Изгибные напряжения на растянутой стороне зуба (см. рис. 3.48) F (сж из ) K F T , (3.59) где K F – коэффициент нагрузки (см. п. 3.3.1), индекс F относится к расчету изгибных напряжений; T – теоретический коэффициент концентрации напряжений. Далее в формулу (3.59) подставляют выражения (3.57) и (3.58). Для прямозубых передач условие изгибной выносливости записывают в виде K F 2K F T1 (3.60) F F t YFS YFS F , bwm d1bwm где изгибное напряжение F и допускаемое напряжение F (определение F см. п. 3.4.3) – в МПа; K F K F – коэффициент нагрузки (см. п. 3.3.1), при симметричном расположении зубчатой пары относительно опор K F 1,3 , при несимметричном расположении – K F 1,5 ; момент T1 – в Нмм; диаметр d1 , ширина венца bw , модуль зубьев m – в мм; YFS YFS1 ( z1 ) – коэффициент формы зуба. Коэффициент YFS – безразмерный коэффициент, учитывающий форму зуба и концентрацию напряжений (в том числе форму галтелей1 на рис. 3.47). Форма зуба зависит от числа зубьев колеса z и коэффициента смещения инструмента x (модуль 5, см. п. 3.1.4). Значения YFS приведены в литературе в виде таблиц и графиков [3]. В табл. 3.5 представлены значения YFS YFS ( z) при x 0 (ГОСТ 21354-87). Таблица 3.5. Значения коэффициента формы зуба z ( zv ) 17 20 22 24 28 35 40 YFS 4,26 4,07 3,98 3,92 3,81 3,75 3,70 1 Для уменьшения концентрации напряжений в месте изменения формы зуба предусматривают галтель (см. рис. 3.47). 112 Расчет косозубых передач на изгибную выносливость производят также по условию (3.60), но коэффициент формы зуба для косозубых передач YFS YFS ( zv ) является функцией от эквивалентного числа зубьев zv , определяемого по формуле zv z / cos3 , где угол – угол наклона зубьев. 3.4.8. Расчеты на выносливость конических передач Расчеты на выносливость конических передач производят аналогично расчету цилиндрических передач [2]–[5]. Исходной формулой для условия контактной выносливости является зависимость (3.49). Коническое колесо заменяют эквивалентным цилиндрическим колесом с той же длиной зуба b (см. модуль 6, п. 3.1.8), профилем, соответствующим среднему сечению зуба, и эквивалентным числом зубьев (3.61) zv z / cos . Расчетное контактное напряжение H 6,7 104 K H T1 H , de31uH (3.62) где T1 – в Нм; d e1 – внешний делительный диаметр шестерни, мм; H и H – в МПа. Для прямозубых конических колес коэффициент, учитывающий влияние на несущую способность передачи вида конических колес, H 0,85 . Формулу (3.62) используют для проверочного расчета стальных конических зубчатых колес. Проектировочный расчет, исходя из условия контактной выносливости, проводят по формуле de1 1650 3 K H T1 u H H 2 где d e1 – в мм; T1 – в Нм; H – в МПа. 113 , При расчете на изгибную выносливость (аналогично расчету цилиндрических передач) проверяют выполнение условий прочности при изгибе для зубьев шестерни и колеса: F1 K F Ft Y YFS1 F 1 ; F 2 FS 2 F 1 F 2 , bmn F YFS1 где mn – нормальный модуль в среднем сечении конического колеса; YFS – коэффициент формы зуба эквивалентного колеса, YFS выбирают по zv (см. формулу (3.61)); F H 0,85 . 3.4.9. Расчеты на выносливость червячных передач Для всех червячных передач расчет по контактным напряжениям является проектировочным, определяющим размеры передачи (так же как и для зубчатых передач). Проверочными являются расчеты зубьев червячного колеса на изгибную выносливость и на предотвращение заедания [5]. Наибольшее контактное напряжение в зоне зацепления определяют по формуле Герца (см. формулу (3.49)). Межосевое расстояние при проектировочном расчете aw K a 3 K H T2 2H , где K a = 610 для линейчатых червяков; aw – в мм; T2 – в Нм; H – в МПа. Проверочный расчет по условию контактной выносливости проводят по формуле [5] H 98Z E cos w d2 KT2 H , d w1 1 – коэффициент, учитываюE1 (1 22 ) / E2 ] щий механические свойства материалов червяка ( 1 , E1 ) и червячного колеса ( 2 , E2 ); – коэффициент Пуассона; E – модуль где Z E [(1 12 ) / 114 упругости материала, МПа; K – коэффициент нагрузки (см. модуль 7); T2 – вращающий момент на колесе, Нм; d 2 mz2 и d w1 m(q 2 x) – делительный и начальный диаметры соответственно колеса и червяка, мм; m – модуль зацепления, мм; q – коэффициент диаметра червяка (см. п. 3.2.2); x – коэффициент смещения (см. модуль 6, п. 3.2.3). Проверочный расчет на изгибную выносливость зубьев червячных колес проводят по формуле [2], [5] F KFt 2 cos w YF 2 F , 1,3m2 (q 2 x) где изгибное напряжение F и допускаемое напряжение F – в МПа; Ft 2 – окружная сила на колесе (см. п. 3.3.4); YF 2 YF 2 ( zv2 ) – коэффициент формы зубьев, зависящий от эквивалентного числа зубьев, zv 2 z2 / cos3 w ; w – угол подъема витка (см. п. 3.2.2). Примеры по темам модуля 8 Пример 1. Произвести геометрический расчет прямозубой передачи (рис. 3.49), нарезанной без смещения, если вращающий момент на валу колеса T2 30 Нм, передаточное число пары u 4 , допускаемое напряжение для зубьев колеса H 500 МПа. Решение. К геометрическим параметрам зубчатой передачи относятся (см. рис.3.49): межосевое расстояние aw , модуль зубьев m , числа зубьев шестерни z1 и колеса z2 , делительные диаметры шестерни d1 и колеса d 2 , диаметры окружности вершин da1 и d a 2 , диаметры окружности впадин d f 1 и d f 2 , ширина венцов колеса b2 и шестерни b1 (см. модуль 4, п.3.1.3). 1. Рассчитаем предварительно межосевое расстояние по формуле (3.56), выбрав ba 0, 4 , полагая, что зубчатая пара расположена симметрично опорам ( K H 1,3) , 115 aw K a (u 1) 3 T2 K H H 2 u ba 2 490(4 1) 3 30 1,3 71 мм. 5002 42 0, 4 2. Найдем предварительно делительный диаметр шестерни по формуле (3.54) 2aw 2 71 d1 28 мм. (u 1) (4 1) Рис. 3.49. Геометрические параметры зубчатой передачи 3. Зададим число зубьев шестерни из диапазона 18...30: z1 19 . 4. Подберем из стандарта (см. ниже) величину модуля зубьев, для этого предварительно рассчитаем m d1 / z1 28 / 19 1,5 мм. Значения модуля зубьев, мм m, мм 1; 1,25; 1,5; 1,75; 2; 2,25; 2,5; 2,75; 3; 3,5; 4; 4,5; 5; 5,5; 6; 7 Назначим m 1,5 мм. 5. Найдем число зубьев сопряженного колеса z2 z1u 19 4 76 . 116 6. Рассчитаем геометрические параметры проектируемой передачи при модуле зубьев m 1,5 мм, числах зубьев шестерни z1 19 и колеса z2 76 : d1 mz1 1,5 19 28,5 мм; d 2 mz2 1,5 76 114 мм; aw 0,5(d 2 d1 ) 0,5(114 28,5) 71, 25 мм; da1 d1 2m = 28,5 + 2 1,5 = 31,5 мм; da2 d2 2m =114 + 2 1,5 =117 мм; d f 1 d1 2h f m( z1 2 2c*) m( z1 2 2 0, 25) m( z1 2,5) , или в более удобном виде d f 1 d1 2,5m = 28,5 2,5 1,5 = 24,75 мм; d f 2 d 2 2,5m = 114 2,5 1,5 = 110, 25 мм; b2 ba aw 0, 4 71, 25 28,5 29 мм; b1 1,1b2 1,1 29 31,9 32 мм. Ширину венца шестерни b1 назначаем больше ширины венца колеса b2 (с целью облегчить сборку механизма). Пример 2. Проверить изгибную выносливость зубьев прямозубой цилиндрической передачи, если модуль зубьев m 1,5 мм, числа зубьев шестерни z1 19 и колеса z2 76 , момент на валу шестерни T1 7,5 Нм, ширина венца b2 29 мм, допускаемое напряжение F 200 МПа, полагая, что зубчатая пара расположена симметрично опорам ( K F 1,3 ). Решение. Проверку изгибной выносливости проведем по условию (3.60), учитывая, что делительный диаметр шестерни d1 z1m и коэффициент формы зуба YF (19) 4,13 (см. табл. 3.5): F 2T1K F 2 7,5 103 1,3 YF 4,13 65 МПа. d1bw m 19 1,5 29 1,5 117 Поскольку F 65 МПа F 200 МПа , то условие изгибной выносливости выполняется. Тест по темам модуля 8 а б 1 В случае контакта выпуклых поверхностей (вариант а) На рисунке показано два вида контакта сопряженных поверхностей зубьев: а – выпукло-выпуклый (внешнее зацепление); б – выпукло-вогнутый (внутреннее зацепление). Укажите, в каком случае контактные напряжения будут меньше. 2 В случае контакта выпуклой и вогнутой поверхностей (вариант б) 3 Контактные напряжения будут одинаковы 2. Зависят ли контактные напряжения от свойств материала зубьев колес? 1 Зависят 2 Не зависят 3 Зависимость носит линейный характер 3. Какое условие положено в основу проектировочного расчета закрытой зубчатой передачи? 1 2 Условие износо- Условие изгибстойкости ной выносливости 3 Условие контактной выносливости 4 Условие теплостойкости 4*. Какие условия выносливости используют при расчете зубчатых передач? 1 cp 2 F F 3 H H 4 и 5*. Если действующие контактные напряжения в зубчатой передаче больше допускаемых, то следует: 1 2 увеличить моувеличить шидуль зацепления рину зубчатых колес 3 увеличить диаметры зубчатых колес 118 4 уменьшить ширину зубчатых колес 6. При консольном расположении зацепляющихся зубчатых колес их рекомендуется делать уже, чем при симметричном размещении между опорами, для: 1 удобства сборки 2 уменьшения неравномерности распределения нагрузки на зубья 3 снижения массы 4 уменьшения длины валов 7. Критерии работоспособности зубчатой передачи относятся: 1 к ободу колеса 2 к ступице колеса 3 к зубьям колеса 4 к шпоночному пазу 8. Если необходимо спроектировать зубчатую передачу для редуктора, следует: 1 подобрать материалы и рассчитать на жесткость 2 подобрать передачу по стандарту и проверить мощность 3 4 выбрать передачу подобрать матеиз каталога и риалы и рассчирассчитать на из- тать на прочность носостойкость 9. Если необходимо спроектировать червячную передачу для редуктора, следует: 1 подобрать материалы и рассчитать на устойчивость 2 подобрать передачу по стандарту и проверить мощность 3 выбрать передачу из каталога и рассчитать на жесткость 4 подобрать материалы и рассчитать на прочность 10. Расчет на прочность по контактным напряжениям конических зубчатых передач выполняют: 1 по оригинальной методике 2 так же, как цилиндрических зубчатых передач 3 4 по теории проч- так же, как ходоности коничес- вых винтов перекого зацепления дачи винт–гайка 119 11*. Для червячных передач проверочными являются расчеты: 1 на прочность, на предотвращение заедания 2 по контактным напряжениям, напряжениям изгиба, на предотвращение заедания 3 на прочность, устойчивость 4 на износостойкость, устойчивость 12*. От чего зависят изгибные напряжения? 1 2 3 От формы От нормальной силы От допускаемых изгибзуба в зацеплении ных напряжений 4 От формы галтели 13. Основной вид разрушения поверхности зубьев при работе закрытых зубчатых передач со смазкой – это: 1 2 3 4 износ выкрашивание поломка заедание 120 МОДУЛЬ 9 Тема 4. МНОГОЗВЕННЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ Одной парой зубчатых колес можно изменить частоту вращения вала не более чем в 10 раз. Для получения больших передаточных отношений применяют сложные механизмы, которые называют многозвенными. Многозвенные механизмы подразделяют на две группы: – многоступенчатые передачи (механизмы c неподвижными геометрическими осями колес); – механизмы, в состав которых входят колеса с перемещающимися в пространстве осями (подвижные колеса). К последней группе относят такие механизмы как планетарные, дифференциальные, волновые. В тех случаях, когда нужно изменить направление вращения (коробки скоростей в автомобилях, станках) или передать движение на относительно большие расстояния, используют многозвенные зубчатые механизмы с промежуточными (паразитными) колесами. 4.1. Передаточное отношение многоступенчатой передачи Многоступенчатая передача состоит из нескольких цилиндрических, конических зубчатых пар (в их состав могут входить и червячные передачи), соединенных последовательно. На каждом промежуточном валу размещают по два колеса, одно из которых является ведомым по отношению к предыдущему, другое – ведущим по отношению к последующему (рис. 4.1). Рис. 4.1. Двухступенчатый редуктор: коническо-цилиндрический 121 В общем случае передаточное отношение такого механизма i1n ... n n 2 3 n (4.1) или i1n i12 i23 ... in1,n . n (4.2) Передаточное отношение многоступенчатой передачи равно произведению передаточных отношений ее ступеней. Для цилиндрической многоступенчатой передачи (рис. 4.2), используя формулы z z z i12 2 , i23 3I ,…, in1,n I n z1 z2 zn1 и учитывая, что при внешнем зацеплении цилиндрических зубчатых колес передаточное отношение i12 0 , из (4.2) получают: z z z3 (4.3) I ... I n , z1 z2 zn1 где k – число внешних зацеплений, каждое из которых изменяет направление вращения на противоположное. i1n (1)k zn n z3 3 z2 I z3 zI2 2 1 z1 Рис. 4.2. Многоступенчатая передача 122 4.2. Передаточное отношение последовательного ряда Зубчатый механизм с промежуточными (паразитными) колесами (рис. 4.3) – это многозвенный механизм c неподвижными геометрическими осями колес, который еще называют последовательным рядом. Передаточное отношение последовательного ряда на рис. 4.3 (с цилиндрическими колесами) найдем из формулы (4.3) при условии, что z2 z2 , ... , zn 1 zn1 , i1n (1) k zn , z1 (4.4) т.е. i1n зависит только от чисел зубьев последнего и первого колес. n zn z3 3 z2 2 z1 1 Рис. 4.3. Последовательный ряд Все остальные зубчатые колеса механизма на численное значение i1n не влияют и поэтому называются паразитными. В формулах (4.3)–(4.4) учитывают направление вращения колес только в случае цилиндрических передач. Если в состав механизма входят различные передачи (см. рис. 4.1), то в формулах (4.3)–(4.4) отсутствует множитель (1)k . 123 4.3. Понятие о планетарных передачах 4.3.1. Общие сведения о планетарной передаче Планетарными называют передачи, содержащие зубчатые колеса с подвижными (перемещающимися) осями. На рис. 4.4 и 4.5 показаны кинематические схемы наиболее распространенных зубчатых планетарных передач. Здесь 1 и 3 – центральные колеса, причем колесо 3 неподвижно; 2 и 2 – колеса с подвижными (перемещающимися в пространстве) осями, которые называются сателлитами; h – звено, на котором установлены оси сателлитов, называется водилом. б а Рис. 4.4. Планетарная передача а б Рис. 4.5. Планетарные передачи 124 Использование в передаче нескольких равномерно расположенных сателлитов (до 5 колес) распределяет передаваемую мощность на несколько потоков и позволяет уравновесить радиальные нагрузки на валы и их опоры. Основные достоинства планетарных передач: – так же как и многоступенчатые передачи, они обладают высокими передаточными отношениями (до 1000 и более); – их размеры и масса меньше, чем у серии зубчатых колес, вследствие передачи мощности по нескольким потокам, число которых равно числу сателлитов; – малые нагрузки на валы и опоры. Основные недостатки планетарных передач: – повышенные требования к точности изготовления деталей; – специальные требования для обеспечения сборки передач, которые должны быть выполнены при проектировании и сборке; – при больших передаточных отношениях возможно самоторможение1. Для обеспечения сборки планетарных передач необходимо соблюдать: – условие соосности (совпадение геометрических центров колёс); – условие сборки (сумма зубьев центральных колёс кратна числу сателлитов); – условие соседства (вершины зубьев сателлитов не соприкасаются друг с другом) [5]. Планетарную передачу применяют в качестве редуктора и мультипликатора в силовых передачах, приборах, робототехнике; в качестве коробки передач. Часто применяют планетарную передачу, совмещенную с электродвигателем (мотор-редуктор). По КПД планетарные передачи не уступают другим типам зубчатых передач с учетом общей тенденции его уменьшения при больших передаточных числах: 0,95...0,97 закрытой одноступенчатой передачи; 0,92...0,96 двухступенчатой передачи. 1 Понятие о самоторможении планетарных передач см. в работе [7]. 125 4.3.2. Принцип действия планетарной передачи Простейшая планетарная передача показана на рис. 4.4. Пусть колесо 1 – ведущее звено механизма. Вращаясь вокруг основной оси ОО с угловой скоростью 1 , оно приводит в движение сателлит 2 (рис.4.4, б). Точка А является полюсом зацепления W12 колес 1 и 2, поэтому по определению полюса в модуле 4 v A1 v A2 . (4.5) Точно так же совпадают друг с другом скорости колес 3 и 2 в точке B (полюс W23 ), и так как колесо 3 неподвижно, то эти скорости равны нулю (см. рис. 4.4, б). Изменение скорости по высоте сателлита 2 происходит по линейному закону. Отсюда следует, что скорость центра сателлита vC 0,5vA2 ; ось сателлита С перемещается в пространстве, вращаясь вокруг оси ОО, и приводит в движение водило h с угловой скоростью h . 4.3.3. Кинематический расчет планетарных передач Существует несколько способов определения передаточного отношения планетарной передачи. Первый способ основан на приведенных выше положениях. Скорость в точке A колес 1 и 2 (см. рис. 4.4 и формулу (4.5)) v A1 v A2 1 OA 0,51d w1 , (4.6) где d w1 – диаметр начальной окружности колеса 1 (см. модуль 4, п. 3.1.2). Скорость в точке B колес 2 и 3 (см. рис.4.4, б) vВ2 = vВ 3 0 . Ось C сателлита 2 вращается вокруг оси OO со скоростью (см. рис. 4.4, б) (4.7) vC 0,5vА2 0,251dw1 , 126 Угловая скорость водила (см. рис. 4.4) v C . h ОC С учетом формулы (4.7) и соотношения (см. рис.4.4, б) OC ОА AC 0,5d w1 0,5d w2 , где d w2 – диаметр начальной окружности колеса 2 (сателлита), получают: v d w1 C 1 . (4.8) h ОC 2(d w1 d w2 ) Передаточное отношение механизма на рис. 4.4 при ведущем колесе 1 (входное звено), ведомом водиле h (выходное звено) и неподвижном колесе 3 i13h 1 h 2(d w1 d w2 ) . d w1 (4.9) Здесь и в дальнейшем верхний индекс в обозначении передаточного отношения относится к звену, которое остается неподвижным: в формуле (4.9) – это цифра 3, так как неподвижным является звено 3. Если зубчатые колеса передачи нарезаны без смещения, то диаметры начальных окружностей совпадают с делительными диаметрами колес 1, 2 и 3 ( d w d mz ) и формула (4.9) приобретает вид 2(d1 d 2 ) z z (4.10) i13h 1 2 1 2 , h d1 z1 где z1 и z2 – числа зубьев колеса 1 и сателлита 2. Условием соосности планетарной передачи, представленной на рис. 4.4, является выполнение равенства ОВ ОА АВ . (4.11) Из формулы (4.11) соотношение чисел зубьев колес 1, 2 и 3 планетарной передачи: 127 0,5d w3 0,5d w1 d w2 ; 0,5d3 0,5d1 d 2 ; 0,5mz3 0,5mz1 mz2 ; 0,5 z3 0,5 z1 z2 , (4.12) где d w3 – диаметр начальной окружности колеса 3. Выражая число зубьев сателлита z2 из последнего соотношения (4.12) и, подставляя в формулу (4.10), получают i13h 1 h 2 z 0,5 z3 0,5 z1 z1 z2 . 2 1 z1 z1 (4.13) Окончательно для планетарной передачи на рис. 4.4 i13h 1 z3 . z1 (4.14) Второй способ нахождения передаточного отношения планетарной передачи позволяет получить расчетные зависимости в общем виде. Приводят планетарную передачу (например, на рис. 4.4) во вращательное движение вокруг основной оси OO . Пусть угловая скорость этого движения OO будет равна скорости водила h , но направлена в противоположную сторону, т.е. OO h . Тогда получают механизм, у которого водило h неподвижно: hh h h 0 , а каждое из звеньев передачи (звенья 1, 2 и 3 на рис. 4.4) будет участвовать в двух вращательных движениях. Для результирующих угловых скоростей звеньев 1, 2 и 3 получают: 1h 1 h ; 2h 2 h ; (4.15) 3h 3 h . Формулы (4.15) имеют простой физический смысл. Поскольку предполагается, что механизм вращается с угловой скоростью, равной h по величине и противоположной ей по направлению, то получается механизм, у которого водило неподвижно, а вели128 чины 1h , 2h и 3h представляют собой угловые скорости звеньев 1, 2 и 3 относительно водила h . Механизм, полученный из планетарной передачи в результате остановки водила, называют обращенным. Очевидно, что геометрические оси всех колес обращенного механизма неподвижны (сравните схемы а и б на рис. 4.6 или 4.7). а б Рис. 4.6. Многозвенные механизмы Следовательно, обращенный механизм (на рис. 4.6, б или 4.7, б) представляет собой многозвенную передачу (либо многоступенчатую передачу, либо последовательный ряд с паразитными колесами). б а Рис. 4.7. Многозвенные механизмы 129 Передаточное отношение обращенного механизма (см. рис. 4.6, б или 4.7, б) с учетом соотношений (4.15): h i13 1h 3h 1 h . 3 h (4.16) Используя формулу (4.16) для нахождения передаточного от3 ношения i1h планетарной передачи (учитывая, что 3 0 ), полу- чают h i13 1 h 1 1 1 i13h , h h (4.17) отсюда h i13h 1 i13 , (4.18) h где i13 – передаточное отношение многозвенной передачи. Такой метод кинематического расчета называют методом остановленного водила или методом Виллиса. 4.3.4. Критерии работоспособности планетарных передач Основными критериями работоспособности планетарных зубчатых передач (как и для других типов закрытых зубчатых передач) являются: – контактная выносливость рабочих поверхностей зубьев; – изгибная выносливость зубьев. Расчет передачи выполняют с учетом числа сателлитов и неравномерности распределения нагрузки между сателлитами. Примеры по темам модуля 9 Пример 1. Определить передаточное отношение iр коническоцилиндрического редуктора (рис. 4.8), если передаточные числа ступеней uкон 3 и uцил 5 . 130 Рис. 4.8. Коническо-цилиндрический редуктор Решение. В основе редуктора – двухступенчатая передача с конической и цилиндрической парами, поэтому передаточное отношение редуктора (см. формулу (4.2)) iр uкон uцил 3 5 15 . Пример 2. Определить число зубьев z1 шестерни, установленной на входном валу (вал 1) трехступенчатого редуктора (рис. 4.9). Рис. 4.9. Трехступенчатый редуктор Передаточное отношение редуктора iр 60 , числа зубьев колес представлены на кинематической схеме (см. рис. 4.9). Решение. Передаточное отношение трехступенчатого редуктора (см. формулу (4.2) и рис. 4.9) z z z iр i12 i23 i34 , z1 z3 z5 следовательно, z z z 100 88 75 z1 20 зубьев. iр z3 z5 60 22 25 131 Пример 3. Найти частоту вращения и угловые скорости валов редуктора (см. рис. 4.9), если частота вращения выходного вала n4 50 об/мин, число зубьев z1 20 . Решение. 1. Определим передаточные отношения ступеней: z 100 i12 2 5; z1 20 i23 z4 88 4; z3 22 z6 75 3. z5 25 2. Рассчитаем частоты вращений валов: n3 n4 i34 50 3 150 об/мин; i34 n2 n3 i23 150 4 600 об/мин; n1 n2 i12 600 5 3000 об/мин. 3. Найдем угловые скорости вращения валов, с–1, 3 4 i34 5,23 3 15,69 с–1; 2 3 i23 15,69 4 62,76 с–1; 1 2 i12 62,76 5 313,8 с–1. Пример 4. Передаточное отношение последовательного ряда (см. рис. 4.3) равно (–6). Чему равно число зубьев первого колеса z1, если число зубьев последнего колеса z4 равно 120? Решение. В соответствии с формулой (4.4) для последовательного ряда число зубьев первого колеса z 120 z1 n 20 . i1n 6 Пример 5. Определить передаточное отношение планетарной передачи (схема на рис. 4.7, а), если числа зубьев колеса 1 z1 20 и колеса 3 z3 120 . 132 Решение. Для нахождения передаточного отношения планетарной передачи на рис. 4.7, а используем формулу (4.18). 1. Предварительно определим передаточное отношение обращенного механизма (схема на рис. 4.7, б). Этот механизм является последовательным рядом с паразитным колесом 2 (см. формулу (4.4)), поэтому z 120 h i13 (1)k 3 6 , z1 20 где число внешних зацеплений k = 1 . 2. Передаточное отношение планетарной передачи h i13h 1 i13 1 (6) 7 . 3 Пример 6. Определить передаточные отношения i1h и ih31 пла- нетарной передачи, схема которой приведена на рис. 4.10, а. Числа зубьев колес: z1 20 , z2 100 , z2 ' 20 , z3 120 ( aw12 aw2 '3 210 мм). Решение. 1. Для нахождения передаточных отношений планетарной передачи на рис. 4.10, а представим схему обращенного механизма на рис. 4.10, б. а б Рис. 4.10. К примеру 6 2. Обращенный механизм представляет собой двухступенчатую зубчатую передачу, передаточное отношение которой (см. формулу (4.3)) 133 h i13 (1)k z2 z3 100 120 (1)2 30 , z1 z2I 20 20 где число внешних зацеплений равно 2. 3 3. Передаточные отношения i1h и ih31 планетарной передачи h i13h 1 i13 1 30 29 ; ih31 1 1 0,034 , 3 i1h 29 где знак «–» означает, что входной и выходной валы (валы звеньев 1 и h на рис. 4.10, а) вращаются в разные стороны. Тест по темам модуля 9 1. Передача, в состав которой входят колеса с подвижными осями – это: 1 2 3 4 червячная передача ременная передача планетарная передача коническая передача 2*. Большое передаточное отношение можно обеспечить с помощью: 1 червячной передачи 2 3 винтовой зубча- многоступенчатой той передачи передачи 4 планетарной передачи 3*. Максимальное передаточное отношение не превышает 10 в случае: 1 конической передачи 2 винтовой зубчатой передачи 134 3 червячной передачи 4 планетарной передачи 4. На схеме показан редуктор: 1 конический 2 цилиндрический 3 планетарный 4 червячный 5. Определить передаточное отношение двухступенчатой цилиндрической передачи, если i12 5 , i23 3 : 1 8 2 –15 3 1/15 4 15 6*. В трехступенчатом цилиндрическом редукторе передаточные числа ступеней равны между собой ( u 4 ). Чему может быть равно передаточное отношение редуктора? 1 16 2 64 3 –16 4 –64 7*. Последовательный ряд с паразитными зубчатыми колесами используют: 1 для изменения направления вращения 2 3 для передачи движения на для получения больших относительно большие рас- передаточных отношестояния ний 8. Чему равна частота вращения выходного вала двухступенчатого редуктора, если входной вал вращается с nвх 3000 об/мин? Передаточные числа ступеней uI = 4 и uII = 3. 135 1 nвых 2 750 об/мин nвых 3 1000 об/мин nвых 4 250 об/мин nвых 430 об/мин 9. На схеме показан двухступенчатый редуктор: 1 2 коническоцилиндрическоцилиндрический червячный 3 планетарный 4 червячный 10. Недостатком планетарной передачи является: 1 2 пониженный повышенные требования к точности изгоКПД товления 3 большие габариты 4 небольшое передаточное отношение 11. Расчет планетарной передачи на контактную выносливость выполняют с учетом: 1 КПД передачи 2 числа сателлитов и неравномерности распределения нагрузки между ними 3 4 температуры числа масла центральных колес 12. Основным критерием работоспособности планетарной зубчатой передачи является: 1 коррозийная стойкость 2 износостойкость 3 жесткость 136 4 прочность (контактная и изгибная выносливость) МОДУЛЬ 10 Тема 4. МНОГОЗВЕННЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ 4.4. Волновые передачи 4.4.1. Общие сведения о волновой передаче Волновой называют механическую передачу, в которой вращение передается вследствие перемещения зоны деформации упругого гибкого звена. Механические волновые передачи могут быть фрикционными и зубчатыми [5]. Волновая передача на рис. 4.11 представляет собой цилиндрическую передачу внутреннего зацепления, в которой гибкое колесо 1 деформируется генератором волн h и входит в зацепление с центральным жестким колесом 2 в двух зонах. В процессе вращения генератора волн зоны зацепления жесткого и гибкого колес перемещаются. По гибкому колесу бежит волна деформации. Отсюда и название передачи – волновая. а б Рис. 4.11. Волновая передача Основные достоинства волновых передач: – большие передаточные отношения; – плавность работы и малый шум, которые объясняются большим числом одновременно зацепляющихся зубьев (многопарность зацепления в двух зонах) и их постепенным входом в контакт; – большие вращающие моменты при малых габаритах и массе из-за многопарности зацепления; 137 – возможность обеспечивать абсолютную герметизацию при передаче движения из одной среды в другую (на рис. 4.11, б давления сред снаружи и внутри различны, pсн pвн ) без уплотнения вращающихся деталей1. Основные недостатки волновых передач: – сложность изготовления гибкого звена; – повышенные требования к точности изготовления деталей; – ограниченные частоты вращения генератора волн, возникновение вибраций. Волновые передачи применяют в промышленных роботах и манипуляторах, в механизмах с большим передаточным отношением, а также в устройствах с повышенными требованиями к кинематической точности или герметичности. В одной ступени передаточные отношения волновых зубчатых передач2 лежат в диапазоне от 80 до 315. КПД волновых передач составляет 0,7…0,9 [5] и уменьшается с увеличением передаточного отношения. 4.4.2. Принцип действия и передаточное отношение волновой передачи Принцип работы волновой передачи аналогичен работе планетарной передачи с внутренним зацеплением, деформируемым сателлитом и водилом в виде генератора волн. Обычно ведущим (быстроходным) звеном в волновой передаче является генератор волн h (см. рис. 4.11). Ведомым (тихоходным) звеном может быть либо гибкое зубчатое колесо 1, либо жесткое зубчатое колесо 2 (как на рис. 4.11). Пусть ведомым является гибкое колесо 1. Число зубьев гибкого колеса z1 назначают меньше, чем число зубьев жесткого колеса z2 , поэтому за один оборот генератора волн гибкое колесо вынужденно повернется (против вращения генератора волн) на угол, соответствующий дуге l ( z2 z1 ) P , где P шаг зацепления. 1 Это используют в авиационной, космической и подводной технике. Примером уплотнения подвижных деталей является манжета на рис. 3.28 (см. модуль 6). 2 ГОСТ 26218-94. Редукторы и мотор-редукторы волновые зубчатые. Параметры и размеры. 138 Передаточное отношение определяют, используя метод Виллиса. Если ведомым звеном является гибкое колесо 1 при неподвижном жестком колесе 2, то ih21 z1 . z2 z1 (4.19) Если ведомым звеном является жесткое колесо 2 при неподвижном гибком колесе 1 (см. рис. 4.11), то ih1 2 z2 . z2 z1 (4.20) 4.4.3. Особенности конструкции волновых передач На рис. 4.11, б гибкое колесо 1 представляет собой тонкостенную оболочку в виде цилиндра с дном, на которой выполнен зубчатый венец с наружными зубьями эвольвентного профиля. Жесткое колесо 2 имеет зубья внутреннего зацепления и соединено с тихоходным валом. Генератор волн h выполнен в виде двух роликов большого диаметра, расположенных на водиле, и соединен с быстроходным валом. Тихоходный вал в соответствии с соотношением (4.20) вращается в ту же сторону, что и быстроходный. На практике встречаются конструкции, в которых генератор волн, представляющий собой водило, состоит из овального кулачка и напрессованного на него специального (гибкого) шарикоподшипника [1], [2]. Материалом гибких колес служат стали марок 30ХГСА, 40X13, 40ХНМА. Для волновых редукторов общего назначения чаще других применяют сталь 30ХГСА с термообработкой – улучшение (280...320 НВ), а зубчатый венец подвергают дробеструйному наклепу или азотированию ( в 1100 МПа; 1 480...500 МПа). Жесткие колеса волновых передач по конструкции подобны колесам с внутренними зубьями обычных и планетарных передач, поэтому их изготовляют из обычных конструкционных сталей, например, марок 45 или 40Х [5]. 139 4.4.4. Основные критерии работоспособности волновых передач Основные критерии работоспособности волновой зубчатой передачи: – усталостная прочность гибкого венца колеса в местах концентрации напряжений, обычно под впадиной зуба; – статическая и динамическая грузоподъемность подшипника генератора волн. Изнашивание зубьев при правильно выбранных геометрии зацепления, материалах, термообработке и параметрах смазывания незначительно и не ограничивает ресурса передачи [5]. Тема 5. ЦЕПНЫЕ ПЕРЕДАЧИ 5.1. Общие сведения о цепных передачах Цепной передачей называется механизм, служащий для преобразования вращательного движения между параллельными валами при помощи закрепленных на них зубчатых колес — звездочек 1 и 2 и надетой на них бесконечной цепи 3 (рис. 5.1)1. Цепь может использоваться для перемещения грузов (тяговые цепи, например в транспортирующих машинах), подвески или подъема и опускания грузов (грузовые цепи, например круглозвенная), для передачи движения (приводные цепи). Рис. 5.1. Цепная передача 1 ГОСТ 24399-80. Цепи роликовые. Термины и определения; пособие [4]. 140 Шаг цепи Р (см. рис. 5.1) является основным параметром цепной передачи. Чем больше шаг, тем выше нагрузочная способность цепи. Оптимальное межосевое расстояние передачи (см. рис. 5.1) принимают из условия долговечности цепи a (30...50) P . Основные достоинства цепных передач: – возможность передачи вращения удаленным (до 8 м) валам; – возможность приводить в движение одной цепью несколько валов; – отсутствие проскальзывания по сравнению с ременной передачей; – радиальная нагрузка на валы меньше, чем в ременной передаче. Основные недостатки цепных передач: – повышенная виброактивность и шум при работе вследствие пульсации скорости цепи и динамических нагрузок1; – интенсивный износ шарниров вследствие трения и трудностей с защитой цепи от попадания грязи, смазывания цепи и т.п.; – вытягивание цепи вследствие износа шарниров и удлинения пластин; – в случае ответственной передачи необходимость в масляной ванне в жестком корпусе. Цепные передачи широко применяют в металлорежущих и деревообрабатывающих станках, в нефтяном, горном, транспортном, сельскохозяйственном машиностроении и других отраслях. Цепные передачи выполняют как понижающими, так и повышающими (цепная передача к заднему колесу велосипеда). Цепные передачи могут осуществлять передачу значительных мощностей (до нескольких тысяч киловатт), допускают скорости движения цепи до 35 м/с и передаточные отношения до 10. КПД цепных передач при благоприятных условиях может достигать η = 0,97...0,99. 1 Динамические нагрузки связаны с неравномерностью движения цепи (см. параграф 5.3). 141 5.2. Виды приводных цепей Приводные цепи бывают роликовые (рис. 5.2, а), втулочные (рис. 5.2, б), зубчатые и фасонно-звенные; первые три вида цепей стандартизованы. Роликовые приводные цепи (тип цепи – ПР) состоят из двух рядов наружных и внутренних пластин (см. рис. 5.2, а); в наружных пластинах 3 расклепаны валики (оси) 2, пропущенные через втулки 1, запрессованные во внутренние пластины 4; на втулки предварительно надеты свободно вращающиеся закаленные ролики 5. а б Рис. 5.2. Цепи: а – роликовая; б – втулочная: 1 – втулка; 2 – валик; 3 – пластина внешняя; 4 – пластина внутренняя; 5 – ролик Валик проворачивается во втулке, образуя шарнир с трением скольжения. Ролик, поворачиваясь на втулке, перекатывается по зубу (рис. 5.3, а) звездочки (рис. 5.3, б). а б Рис. 5.3. Ролик перекатывается по зубу звездочки 142 Роликовые цепи имеют широкое применение. Их используют при скоростях v 15 м/с. Втулочные приводные цепи (тип цепи – ПВ) не имеют роликов (см. рис. 5.2, б). Это удешевляет цепь и уменьшает ее массу, но увеличивает износ втулок цепи и зубьев звездочек. Втулочные цепи выпускают только одного шага и применяют в условиях хорошей защищенности от пыли и обильной смазки (например, в приводах газораспределительных механизмов двигателей внутреннего сгорания). В неответственных передачах втулочные цепи используют при v 1 м/с. Втулочные и роликовые цепи изготавливают однорядными (см. рис. 5.2) и многорядными, с числом рядов 2 (рис. 5.4), 3, 4 и более. Рис. 5.4. Двухрядная роликовая цепь Многорядная цепь с меньшим шагом P позволяет заменить однорядную с большим шагом и тем самым уменьшить диаметры звездочек, снизить динамические нагрузки в передаче. Многорядные цепи могут работать при существенно больших скоростях движения цепи. Нагрузочная способность цепи возрастает почти прямо пропорционально числу рядов. Зубчатые приводные цепи (тип цепи – ПЗ) состоят из звеньев, составленных из набора пластин, шарнирно соединенных между собой (рис. 5.5). 143 Рис. 5.5. Зубчатая цепь Каждая пластина имеет по два зуба и впадину между ними для размещения зуба звездочки (рис. 5.6); рабочими являются грани пластин, наклоненные одна к другой под углом 60°. Рис. 5.6. Звездочка зубчатой цепи Зубчатые цепи работают плавно, с малым шумом, лучше воспринимают ударную нагрузку и допускают высокие скорости. Но эти цепи сложнее и дороже в изготовлении, тяжелее по сравнению с роликовыми, поэтому постепенно вытесняются последними. Цепи должны быть износостойкими и прочными. Пластины цепей изготавливают из сталей марок 50, 40Х и других с закалкой до твердости 40...50 НRС. Валики, втулки, ролики – из цементуемых сталей марок 20, 15Х и других с закалкой до твердости 52...65 НRС. Преимущественное применение в настоящее время имеют передачи роликовыми и втулочными цепями. 144 5.3. Особенности работы цепных передач Особенностью работы цепной передачи является расположение цепи на звездочке не по окружности, а по многоугольнику (рис. 5.7). Это приводит к неравномерности движения цепи. Рис. 5.7. Скорость движения цепи: ВЩ – ведущая ветвь Окружная скорость на зубе ведущей звездочки 1 (см. рис. 5.7) (5.1) v1 0,51d1 , где d1 – делительный диаметр звездочки 1 (см. рис. 5.3), P ; z1 – число зубьев звездочки 1. sin(180 / z1 ) Из рис. 5.7 и с учетом (5.1) следует, что скорость движения це- d1 пи v v1 cos 1 0,51d1 cos 1 , (5.2) где α1 – текущий угол поворота ведущей звездочки относительно перпендикуляра к ведущей ветви. Этот угол меняется в пределах одного углового шага 1 (1 360 / z1 ) в диапазоне 180 / z1 1 180 / z1 . Окружная скорость на зубе ведомой звездочки 2 из рис. 5.7 v2 v 0,52 d 2 , cos 2 отсюда мгновенная угловая скорость ведомой звездочки 2v , 2 d 2 cos 2 где угол α2 на ведомой звездочке меняется в пределах 180 / z2 2 180 / z2 ; 145 (5.3) d2 – делительный диаметр звездочки 2, d 2 P ; z2 – sin(180 / z2 ) число зубьев звездочки 2. Мгновенное передаточное отношение (с учетом (5.2) и (5.3)) (i12 )мгн 1 d 2 cos 2 , 2 d1 cos 1 (5.4) Таким образом, передаточное отношение цепной передачи переменно в пределах поворота каждой звездочки на один зуб. Это вызывает неравномерность движения передачи, динамическое нагружение вследствие ударов звеньев о зубья цепи, колебания цепи. Средняя скорость движения цепи (за время t одного оборота звездочки цепь проходит путь l) l t v P 103 z1 P 103 z1 2n1 P 103 z1n1 2 / 1 2 60 60 P 103 z2 n2 [м/с], 60 (5.5) где P – шаг цепи, мм; z1 , z2 – числа зубьев звездочек; n1 , n2 – частота вращения соответственно вала меньшей, большей звездочки, об/мин. Среднее передаточное отношение за оборот i12 n1 z d 2 2 . n2 z1 d1 (5.6) Для повышения равномерности движения, уменьшения ударных нагрузок, т.е. увеличения долговечности цепи, необходимо по возможности увеличивать число зубьев звездочек. При этом уменьшается центральный угол между зубьями (см. рис. 5.3, 5.6 и 5.7) и соответственно снижается переменная составляющая скорости движения цепи. Число зубьев малой звездочки для роликовых и втулочных цепей z1 29 2i12 , (5.7) где z1 13 . 146 Максимальное число зубьев большой звездочки: для втулочной цепи z2 90 , для роликовой цепи z2 120 . (5.8) (5.9) 5.4. Силы в цепных передачах При передаче вращающего момента T1 ведущая ветвь цепи (ВЩ на рис. 5.8) нагружена силой F1 Ft F0 Fц , (5.10) где Ft – окружная сила на ведущей звездочке; F0 – сила натяжения от силы тяжести ведомой ветви цепи (зависит от положения линии центров звездочек [5]); Fц qv 2 – сила натяжения от действия центробежных сил, q – масса 1 м цепи, кг/м, v – скорость движения цепи, м/с. Рис. 5.8. Провисание цепи: ВЩ – ведущая ветвь; ВМ – ведомая ветвь Окружная сила (см. формулу (5.10)) Ft 2T / d , (5.11) где d – делительный диаметр ведущей звездочки d P , sin(180 / z) z – число зубьев ведущей звездочки. 147 (5.12) При передаваемой мощности P [Вт] и скорости цепи v [м/с] Ft P / v . (5.13) Сила Fц вызывает дополнительное изнашивание цепи. Расчетная нагрузка на валы звездочек FВ kВ Ft , (5.14) где коэффициент нагрузки kВ 1,15 – для горизонтальных передач; kВ 1,05 – для вертикальных; сила FВ направлена по линии центров звездочек; Ft – по формуле (5.11) или (5.13). 5.5. Критерии работоспособности цепных передач Для приводных цепей основными причинами разрушения являются следующие: – изнашивание деталей шарниров; – изнашивание зубьев звездочек; – усталостное разрушение пластин; – ударно-усталостное разрушение тонкостенных деталей – роликов и втулок, причиной которого являются удары шарниров о зубья звездочек при входе в зацепление. В правильно спроектированной и эксплуатируемой передаче износ шарниров опережает усталостные разрушения. Из-за провисания цепи ее заменяют до наступления усталостных разрушений. Основным видом отказа цепных передач является изнашивание шарниров. Основным критерием работоспособности цепных передач является износостойкость шарниров. Для закрытых передач, работающих при значительных внешних динамических нагрузках, критерием работоспособности может быть усталостное разрушение пластин. 148 5.6. Расчеты цепных передач 5.6.1. Расчет по условию износостойкости шарниров Нагрузочную способность роликовой или втулочной цепи определяют из условия, что среднее давление в шарнире звена цепи не должно превышать допускаемое давление p Kэ Ft p , m A (5.15) где K э – коэффициент эксплуатации [4]; сила Ft рассчитывается по формуле (5.11) или (5.13); m – число рядов цепи; A B d 0 – площадь проекции опорной поверхности шарнира, B – длина втулки, d 0 – диаметр валика (см. рис. 5.2.); допускаемое давление p принимают по опытным данным в зависимости от шага цепи P и угловой скорости малой звездочки 1 [4]. Преобразуя условие (5.15), получают формулу для предварительного определения шага цепи K эT1 P 2,8 3 , (5.16) z1m p где Kэ – коэффициент эксплуатации, учитывающий конкретные особенности рассчитываемой передачи [4]; T1 – вращающий момент на ведущей звездочке; – коэффициент числа рядов, учитывающий неравномерность распределения нагрузки по рядам [4]; z1 – число зубьев ведущей звездочки (см. формулу (5.7)); m – число рядов цепи. Допускаемое давление p в формуле (5.16) предварительно выбирают в зависимости от частоты вращения n1 [4]. Для проектирования цепной передачи подбирают стандартную цепь по расчетному шагу P . Шаг P для роликовых и втулочных цепей определяют по формуле (5.16), отдавая предпочтение однорядной цепи. Универсальной методики расчета шага зубчатой цепи пока нет, окончательно зубчатую цепь подбирают по расчетной ширине B (см. рис. 5.5) [4]. 149 Условие (5.15) используют для проверочного расчета роликовой и втулочной цепей. 5.6.2. Проверка цепи на прочность В ответственных передачах цепь проверяют на прочность. Условие прочности цепи на разрыв: s Fp / Fmax s , где разрывное усилие Fp и коэффициент запаса прочности цепи s выбирают из стандарта на выбранную цепь [4]; Fmax Kд Ft F0 Fц – максимальная сила, действующая на цепь; Kд – коэффициент, учитывающий динамическое нагружение от неравномерного движения цепи [4]. Примеры по темам модуля 10 Пример 1. Определить передаточное отношение волновой передачи, если числа зубьев гибкого подвижного колеса 1 и жесткого неподвижного колеса 2: z1 98 и z2 100 . Решение. Для расчета передаточного отношения волновой передачи используем формулу (4.19) ih21 z1 98 49 , z2 z1 100 98 где знак «–» означает, что вал генератора волн и вал гибкого колеса вращаются в противоположные стороны. Пример 2. Определить передаточное отношение волновой передачи на рис. 4.11, если числа зубьев гибкого колеса и жесткого колеса z1 68 и z2 70 . Решение. Для расчета передаточного отношения волновой передачи используем формулу (4.20), так как неподвижно гибкое колесо, z2 70 ih1 2 35 . z2 z1 70 68 150 Пример 3. Подобрать числа зубьев звездочек роликовой цепной передачи, если передаточное отношение i = 5 . Решение. Для выбора чисел зубьев звездочек используем соотношение (5.7) с проверкой по условиям (5.7), (5.9): z1 29 2i12 29 2 5 19 13 ; z2 z1 i 19 5 95 120 . Пример 4. Определить среднюю скорость движения роликовой цепи, если угловая скорость ведущей звездочки 1 = 100 рад/с, число зубьев z1 21 , шаг цепи P = 19,05 мм. Решение. Скорость движения роликовой цепи (см. формулу (5.5)) P 103 z1 19, 05 103 21 100 v 6, 4[м/с]. 2 / 1 2 Пример 5. Определить предварительный шаг однорядной роликовой цепи ( m 1 ) с передаточным отношением i = 4 , если передаваемая мощность 8 кВт, угловая скорость 1=100 рад/с. Коэффициент эксплуатации Kэ 1,2 ; при m 1 коэффициент 1 4 . Решение. 1. Числа зубьев звездочек выберем, используя соотношение (5.7) с проверкой по условиям (5.7), (5.9): z1 29 2i12 29 2 4 21 13 , z2 21 4 84 120 . 2. Предварительное значение средних удельных давлений в шарнирах цепи выбираем по частоте вращения ведущей звездочки из пособия [4]: 301 30 100 955 об/мин давление [p] = 19 МПа. при n1 3. Вращающий момент на валу ведущей звездочки T1 P1 / 1 8000 / 100 80 Нм. 4. Предварительный шаг однорядной роликовой цепи определим по формуле (5.16), учитывая, что 1 при m 1 : P 2,8 3 K эT1 1,2 80 103 2,8 3 17,42 мм. z1m p 2119 151 Тест по темам модуля 10 1. Основное достоинство волновой передачи перед зубчатой парой: 1 2 высокий большое передаточКПД ное отношение 3 простота конструкции 4 высокие требования к точности передачи 2. Возможность обеспечивать абсолютную герметизацию без уплотнения имеют передачи: 1 червячные передачи 2 волновые передачи 3 планетарные передачи 4 конические передачи 3. Для проектирования цепной передачи необходимо: 1 сконструировать цепь 2 3 4 подобрать тя- подобрать стандарт- рассчитать на говую цепь ную приводную цепь прочность валик цепи 4. Волновые зубчатые передачи по сравнению с цилиндрическими зубчатыми передачами имеют: 1 простую конструкцию 2 3 меньшие габариты, высокий массу и шум КПД 4 низкую точность 5. По схеме привода определить тип механических передач и их последовательность (начиная от двигателя). 1 Ременная, коническая, червячная, цепная 2 Ременная, цилиндрическая, винт–гайка, цепная 3 4 Цепная, кониче- Ременная, цилиская, червячная, ндрическая, черременная вячная, цепная 152 6. На схеме показана: 1 2 3 4 червячная передача волновая передача планетарная передача многоступенчатая передача 7. Основной недостаток цепной передачи по сравнению с зубчатой передачей: 1 2 3 малые передаточ- малые часто- непостоянство передаточные отношения ты вращения ного отношения в течение оборота вала 4 наличие цепи 8. Преимущество цепной передачи по сравнению с ременной: 1 2 3 большие передаточ- большие часто- отсутствие проскальные отношения ты вращения зывания цепи 4 наличие цепи 9. Недостаток волновой передачи перед зубчатой парой: 1 высокий КПД 2 3 большое передаточ- простота конное отношение струкции 4 высокие требования к точности передачи 10*. Зубчатая цепь по сравнению со втулочной: 1 работает с меньшим шумом 2 сложнее в изготовлении 153 3 обладает пониженной нагрузочной способностью 11. Причиной неравномерности движения цепи является: 1 наличие ролика 2 профиль зубьев 3 4 расположение цепи на звездочке провисание по многоугольнику цепи 12. Для повышения равномерности движения в цепной передаче необходимо: 1 увеличить число рядов 2 3 увеличить шаг це- увеличить число пи зубьев звездочек 4 увеличить длину цепи 13. Какая цепь наиболее широко применяется в приводах машин? 1 Втулочная 2 Роликовая 3 Зубчатая 4 Круглозвенная 14. Основными критериями работоспособности цепной передачи являются: 1 усталостные разрушения зубьев звездочек 2 усталостное разрушение валиков 3 износ шарниров, усталостное разрушение пластин 154 4 усталостное разрушение втулок МОДУЛЬ 11 Тема 6. ФРИКЦИОННЫЕ ПЕРЕДАЧИ 6.1. Общая характеристика фрикционных передач Фрикционная передача (см. рис. 1.6) служит для преобразования вращательного движения (или для преобразования вращательного движения в поступательное) между валами с помощью сил трения, возникающих между катками, цилиндрами или конусами, насаженными на валы и прижимаемыми один к другому. Фрикционные передачи выполняют либо с постоянным, либо с регулируемым передаточным отношением (вариаторы, см. модуль 1, рис. 1.7). Простейшие фрикционные передачи состоят из двух цилиндрических или конических катков (рис. 1.6 и 6.1)1. По расположению осей валов различают: – передачи с параллельными осями цилиндрические (рис. 6.1, а, 1.6), конусные (с клинчатыми катками (см. рис. 6.1, б)); – передачи с пересекающимися осями конические (рис. 6.1, в). а б в Рис. 6.1. Фрикционные передачи Для цилиндрической фрикционной передачи на рис. 6.1, а передаточное отношение (см. формулы (1.7) и (1.8)) i 1 D2 D 2. 2 D1 (1 ε) D1 (6.1) 1 В вариаторах используют катки различной формы (торовые, сферические и т.д.) для получения минимального скольжения на площадке контакта [5]. 155 Передаточное отношение ортогональной конической фрикционной передачи (см. рис. 6.1, в) i 1 tgδ2 tgδ2 . 2 (1 ε) (6.2) В формуле (6.1) коэффициент упругого скольжения (v1 v2 ) / v1 , (6.3) где v1 , v2 окружные скорости ведущего и ведомого катков. Для передач открытых, работающих всухую = 0,005, для передач закрытых, работающих в масляной ванне = 0,03 [8]. Достоинства фрикционных передач: – простота конструкции; – плавность и бесшумность работы; – возможность плавного регулирования скорости на ходу; – при случайной перегрузке – пробуксовка; – отсутствие мертвого хода при реверсе передачи. Основной недостаток фрикционных передач – потребность в прижимных устройствах. Это вызывает: – значительные нагрузки на опоры валов; – большие потери на трение; – сравнительно низкий КПД; – необходимость выработки специальных требований к материалам катков. Кроме того, фрикционные передачи: – не обеспечивают постоянства передаточного отношения из-за упругого скольжения, либо из-за пробуксовки; – уступают зубчатым передачам в несущей способности. Основные требования к материалам фрикционных колес: – высокая износостойкость и поверхностная прочность; – высокий коэффициент трения (во избежание больших сил сжатия); – высокий модуль упругости (чтобы площадка контакта, а значит и потери на трение были малы). Наиболее пригодными оказываются шарикоподшипниковые стали типа ШХ15 или 18ХГТ, 18Х2Н4МА. Используют также обрезиненные катки, однако у них коэффициент трения падает с ростом влажности воздуха. Разработаны специальные фрикционные 156 пластмассы с асбестовым и целлюлозным наполнителем, коэффициент трения которых достигает 0,5. Используют текстолит, прессованный асбест, прорезиненную ткань и кожу. Фрикционные передачи с постоянным передаточным отношением применяют, главным образом, в кинематических цепях приборов. Фрикционные вариаторы применяют как в кинематических, так и в силовых передачах для бесступенчатого регулирования скорости. Окружная скорость катков открытых силовых передач не должна быть больше 10 м/с, а для закрытых передач – не более 20 м/с [8]. Для одной пары цилиндрических катков силовых передач передаточное отношение i 7 (для передач приборов i 25 ), конических катков i 4 . Коэффициент полезного действия фрикционных передач в основном определяется потерями в результате относительного скольжения катков и потерями в опорах валов. Экспериментально установлено, что для закрытых передач наибольшие значения КПД 0,88...0,93 , для открытых 0,68...0,86 . 6.2. Силы в контакте цилиндрической фрикционной передачи Для работы передачи необходимо, чтобы момент сил трения между катками был больше передаваемого вращающего момента. Окружная сила, приложенная к ведомому катку 2 (рис. 6.2), Ft 2T1 / D1 Fтр , (6.4) должна быть меньше силы трения покоя Fтр , возникающей между катками, прижатыми друг к другу силой Fr . Таким образом, условие работы фрикционной передачи: kFt Fтр = fFr , (6.5) где k – коэффициент запаса сцепления ( k 1,3...1,4 ); f – коэффициент трения (для стальных или чугунных катков, работающих 157 f 0,04...0,05 ; в масляной ванне f 0,15...0,20 ). 1 a 1 Fr работающих всухую D1 T1 Ft Fтр 2 D2 2 Рис. 6.2. Силы во фрикционной передаче Из формулы (6.5) с подстановкой выражения (6.4) сила прижатия катков: kF 2kTt . (6.6) Fr t = f fD1 Большие силы прижатия катков создают значительные радиальные нагрузки на опоры валов и вызывают появление больших контактных напряжений на рабочих поверхностях катков, что делает силовые фрикционные передачи громоздкими, а их нагрузочную способность сравнительно невысокой. Для уменьшения силы прижатия применяют катки с клинчатым ободом (см. рис. 6.1, б), но в таких катках возникает существенное геометрическое скольжение, уменьшающее срок их службы. 6.3. Скольжение во фрикционных передачах Скольжение является причиной износа, уменьшения КПД и непостоянства передаточного отношения. Различают три вида скольжения: буксование, упругое скольжение, геометрическое скольжение. Буксование наступает при перегрузках, когда не соблюдается условие (6.4). При буксовании ведомый каток останавливается, а ведущий скользит по нему, вызывая местный износ или задир по158 верхности. Для исключения буксования при проектировании необходимо назначать достаточный запас сцепления (коэффициент k в формуле (6.5)). Упругое скольжение связано с упругими деформациями в зоне контакта: первоначальный контакт по линии переходит под нагрузкой в контакт по некоторой площадке. Равенство окружных скоростей соблюдается только в точках, расположенных на одной из линий этой площадки. Во всех остальных точках скорости не равны и происходит скольжение. Величина его не превышает 0,2% для стальных катков и 1% для текстолита по стали. Для уменьшения упругого скольжения необходимо уменьшать площадку контакта, то есть выбирать материалы катков с высоким модулем упругости. Геометрическое скольжение может иметь место во фрикционных передачах вследствие разности скоростей ведущего и ведомого катков по длине контакта. Геометрическое скольжение не позволяет катки делать широкими, в результате чего в передаче возникают большие контактные напряжения, ограничивающие передаваемую мощность. Геометрическое скольжение является основной причиной износа рабочих поверхностей фрикционных передач. Геометрическое скольжение в контакте фрикционной передачи с клинчатыми катками проиллюстрировано на рис. 6.3: векторы линейных скоростей на общей образующей (линия контакта АВ) равны только в одной точке С. Рис. 6.3. Распределение окружных скоростей по общей образующей катков 159 6.4. Критерии работоспособности фрикционных передач Основными причинами отказов фрикционных передач являются: – усталостное выкрашивание рабочих поверхностей катков для работающих в масле передач; – изнашивание для передач без смазки; – задир поверхностей при перегреве. Отсюда основными критериями работоспособности фрикционных передач являются прочность, износостойкость, теплостойкость. Проектировочный расчет фрикционных передач выполняют по условию контактной выносливости: используя формулу Герца, определяют межосевое расстояние [8]. Тема 7. РЕМЕННЫЕ ПЕРЕДАЧИ 7.1. Общая характеристика ременных передач Ременная передача – передача трением с гибкой связью. Она состоит (см. рис. 1.9 и 7.1) из ведущего и ведомого шкивов 1 и 2 и ремня 3 (одного или нескольких), надетого на шкивы с предварительным натяжением. Нагрузку передают силы трения между шкивами и ремнем. После зубчатой передачи ременная – наиболее распространенная из механических передач. Рис. 7.1. Ременная передача: ВЩ и ВМ – ведущая и ведомая ветви Достоинства ременных передач (по сравнению с зубчатыми и цепными передачами): 160 – возможность передачи движения на значительные расстояния (до 15 м). – возможность использования при больших скоростях вращения; – плавность и бесшумность работы вследствие эластичности ремня; – простота конструкции, легкость и низкая стоимость обслуживания; – предохранение механизмов от перегрузок и ударных нагрузок вследствие возможного проскальзывания1 ремня. Недостатки ременных передач: – непостоянное передаточное отношение вследствие неизбежного упругого скольжения2 ремня; – необходимость устройства для натяжения ремня; – большие нагрузки на валы и подшипники от натяжения ремня; – большие габариты, в особенности при передаче значительных мощностей; – малая долговечность ремня в быстроходных передачах. Ременные передачи применяют в приводах для передачи движения от электродвигателя или ДВС (рис. 7.2), когда по конструктивным соображениям передаточное отношение может быть не строго постоянным (приводы металлорежущих станков, конвейеров, транспортных, дорожных, строительных и сельскохозяйственных машин и др.). Рис. 7.2. Привод: 1 – электродвигатель; 2 – муфта; 3 – редуктор червячный; 4 – ременная передача 1 Речь идет о буксовании (в ременной передаче его устраняют достаточным натяжением ремня). 2 Упругое скольжение в ременной передаче связано с упругими деформациями из-за натяжения ремня. 161 Мощность, передаваемая ременной передачей, обычно до 50 кВт, может достигать 2000 кВт и больше [5]. Скорость ремня v = 5…50 м/с, а в высокоскоростных передачах – до 100 м/с и выше. 7.2. Виды приводных ремней В зависимости от формы поперечного сечения ремни бывают плоские (рис. 7.3, а), круглые (рис. 7.3, б), клиновые (рис. 7.3, в) и поликлиновые (рис. 7.3, г). а б в г Рис. 7.3. Разновидности ременных передач Ремни изготавливают из прорезиненных тканей или синтетических материалов. В машиностроении наибольшее применение имеют клиновые и поликлиновые ремни. Ремни круглого сечения (см. рис. 7.3, б) предназначены для пространственных передач малой мощности (оборудование полиграфической и текстильной промышленности, настольные станки, приборы, бытовые машины). Скорость ремня до 30 м/с. Передача плоским ремнем (см. рис. 7.3, а) обладает повышенными работоспособностью и ресурсом (в связи с меньшими напряжениями изгиба в плоских ремнях). Ее рекомендуют применять при больших межосевых расстояниях (до 15 м) или высоких скоростях ремня (до 100 м/с). Максимальные значения КПД max 0,95...0,97 . Передаточное отношение i 5 . Клиноременная передача (см. рис. 7.3, в) по сравнению с передачей плоским ремнем (благодаря повышенному сцеплению ремня со шкивами, обусловленному эффектом клина) может передавать большую мощность, допускает меньший угол обхвата 1 162 на малом шкиве, следовательно, меньшее межосевое расстояние а (см. рис. 7.1) допускает бесступенчатое регулирование скорости (ременные вариаторы). Но вследствие значительной высоты сечения ремня напряжения изгиба больше, чем в плоском ремне, и выше потери на внутреннее и внешнее трение. Максимальные значения КПД max 0,92...0,96. Передаточное отношение i 8 . 7.3. Силы и напряжения в ременных передачах Для передачи окружной силы Ft 2T1 / D1 между ремнем и шкивом за счет предварительного натяжения F0 ремней создается сила трения. При работе ведущая ветвь ремня (ВЩ на рис. 7.4) натягивается до силы F1 F0 0,5 Ft , натяжение ведомой ветви (ВМ на рис. 7.4) уменьшается до F2 F0 0,5Ft . Рис. 7.4. Силы в ременной передаче При обегании ремнем шкивов на него действует центробежная сила Fц v 2 A , где плотность материала; v скорость ремня; A – площадь сечения ремня. Таким образом, силы натяжения при передаче полезной нагрузки: – ведущей ветви ремня F1 F0 0,5Ft Fц ; – ведомой ветви ремня F2 F0 0,5Ft Fц . Окружная сила Ft характеризует тяговую способность передачи при данном натяжении ремня силой F0 и коэффициенте упругого скольжения (v1 v2 ) / v1 , где v1 , v2 окружные скорости ведущего и ведомого шкивов. 163 Тяговая способность передачи, связанная с силой трения между ремнем и шкивом, увеличивается с ростом коэффициента трения и угла обхвата 1 (см. рис. 7.1) и уменьшается с увеличением скорости ремня вследствие действия центробежных сил. Критерием рациональной работы ремня служит коэффициент тяги к , значение которого определяет допускаемую окружную силу (7.1) F t 2к F0 , где значения к установлены экспериментально для каждого типа ремня: для плоских ремней к 0, 4...0,5 , для клиновых и поликлиновых к 0,7...0,8 [5]; сила 2 F0 ( F1 F2 ) . В ремне действуют следующие напряжения: – предварительное напряжение (от силы F0 ) 0 F0 / A ; – полезное напряжение (от нагрузки Ft ) t Ft / A ; – напряжение изгиба и 2 ymax E / d р , где ymax – расстояние от нейтральной линии до опасных волокон, с которых начинается разрушение ремня, E – модуль упругости ремня, d р – расчетный диаметр; – напряжения от центробежных сил ц Fц / A . Наибольшее суммарное напряжение возникает в сечении ремня в месте его набегания на малый шкив (точка С на рис. 7.1) max 0 0,5t и1 (ц ) . (7.2) Напряжения изгиба, изменяясь по отнулевому циклу, не влияют на тяговую способность передачи, однако являются главной причиной усталостного разрушения ремня. Силы натяжения ветвей ремня (кроме центробежных) воспринимаются опорами вала (см. рис. 7.4). При передаче ремнем полезной нагрузки (без учета центробежных сил) нагрузка на опору FВ F12 F22 2F1 F2 cos 1 . (7.2а) Обычно эта радиальная нагрузка на опору FВ в 2–3 раза больше передаваемой ремнем окружной силы. 164 7.4. Основные критерии работоспособности Основными критериями работоспособности являются: – тяговая способность или прочность сцепления ремня со шкивом; – долговечность (ресурс) ремня. Если не будет выдержано первое условие, то ремень начнет буксовать, а если не выполнить второе, то ремень быстро разорвется. Расчет по тяговой способности является основным расчетом ременных передач, обеспечивающим одновременно прочность ремней и передачу ими требуемой нагрузки. Расчет на долговечность (ресурс) выполняют как проверочный [3], [5]. Проектировочный расчет клиноременной передачи начинают с выбора сечения ремня по заданной передаваемой мощности и частоте вращения малого шкива с помощью графиков (рис. 7.5) [5]. На рис. 7.5 представлены графики в зависимости от вида нормального сечения клинового ремня; буквенные обозначения идут в порядке увеличения поперечного сечения: А, B, С, D, Е. Рис. 7.5. Графики для выбора сечения ремня В основе уточненных методов расчета ремней на ресурс лежит уравнение кривой усталости qmax N E C , 165 (7.3) где q и C – опытные постоянные [5]; max – наибольшее напряжение, определяемое по формуле (7.2). В формуле (7.3) N E – эквивалентное число циклов нагружения ремня, которое (в том числе) зависит от частоты пробегов ремня: v , L (7.4) где v – скорость ремня, м/с; L – длина ремня, м; – допускаемая частота пробегов, с-1. 7.5. Передача зубчатым ремнем Разновидностью ременной передачи является передача зубчатым ремнем, передающая нагрузку путем зацепления ремня со шкивами (рис. 7.6) и обладающая наибольшей точностью вращения по сравнению с другими типами ременных передач. Рис. 7.6. Зубчато-ременная передача: 1 – шкив; 2 – зубчатый ремень с трапецеидальным профилем; d р – расчетный диаметр Зубчато-ременные передачи имеют достоинства как ременных передач, так и цепных передач: – постоянное передаточное отношение; – малое межосевое расстояние; – небольшие нагрузки на валы и подшипники; – большие передаточные отношения ( i 12 ); – низкий уровень шума и отсутствие динамических нагрузок вследствие эластичности ремня и упругости зубьев. 166 Недостатки: – сравнительно высокая стоимость конструкции шкива с зубьями и зубчатого ремня, усиленного специальными внутренними волокнами; – чувствительность к отклонению от параллельности осей валов; – отсутствие возможности предохранения деталей привода от перегрузок проскальзыванием ремня по шкиву. Передачу зубчатым ремнем применяют как в высоконагруженных передачах (например, кузнечно-прессовое оборудование), используя ее высокую тяговую способность, так и в передачах точных перемещений (из-за постоянства передаточного отношения): приводы печатающих устройств, робототехника и др. Мощность, передаваемая зубчатым ремнем, до 100 кВт; скорость ремня до 60 м/с; максимальный КПД передачи 0,94...0,98 [5]. Передаточное отношение i 12 . Тема 8. КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ 8.1. Коэффициент полезного действия зубчатой передачи В процессе работы зубчатой передачи к валу ведущего колеса 1 приложен движущий момент Т1, а к валу ведомого колеса 2 – момент сопротивления Т2, направленный против угловой скорости вращения вала 2 (рис. 8.1). Рис. 8.1. Механическая передача 167 Мощность на ведущем валу передачи Р1 Т11 больше, чем мощность на ведомом валу Р2 Т22 из-за потерь на трение в зацеплении зубьев, в опорах валов и т.д. ( 1 и 2 – угловые скорости вращения ведущего и ведомого валов (см. рис. 8.1)). Коэффициент полезного действия механической передачи на рис. 8.1 Р Т Т (8.1) 2 2 2 2 , Р1 Т11 Т1 i12 где i12 – модуль передаточного отношения механизма. 8.2. Коэффициент полезного действия червячной передачи КПД червячного зацепления определяют по формулам, полученным для пары винт–гайка (см. модуль 3, формулы (2.13) и (2.15)). Значения приведенного угла трения в зависимости от скорости скольжения для червячных передач получают экспериментально [5]. КПД одноступенчатой червячной передачи с самоторможением не превышает 0,5. 8.3. Коэффициент полезного действия многозвенного механизма Можно показать, что КПД многозвенного механизма1 на примере многоступенчатой передачи Рвых Т вых вых Т вых 1 2 ... n , Рвх Т вх вх Т вх iвх-вых (8.2) где 1 , 2 ,..., n – КПД ступени 1, ступени 2 и т.д., ступени n, которые рассчитывают по формуле (8.1). В табл. 8.1 приведены КПД различных передач с учетом потерь на трение в опорах. 1 В курсе не рассматриваются комбинированные схемы механизмов. 168 Таблица 8.1 КПД различных передач Тип передачи КПД1 Зубчатая цилиндрическая передача закрытая [2] 0,96–0,98 Зубчатая коническая передача закрытая [2] 0,95–0,97 Планетарная передача одноступенчатая [2], [5] 0,95–0,97 Червячная передача ( z1 1 или 2) [2] 0,7–0,85 Червячная передача ( z1 4) [2] 0,8–0,9 Волновая передача [5] 0,7–0,9 Цепная передача [2] 0,92–0,95 Фрикционная передача закрытая [8] 0,88–0,93 Плоскоременная передача [5] 0,95–0,97 Клиноременная передача [5] 0,92–0,96 Зубчато-ременная передача [5] 0,94–0,98 Передача винт–гайка с трением скольжения [5] 0,25–0,35 Передача винт–гайка с трением качения [5] 0,9–0,95 Примеры по темам модуля 11 Пример 1. Во сколько раз сила прижатия катков фрикционной передачи, работающей в масляной ванне, больше окружной силы (см. рис. 6.2)? Коэффициент запаса сцепления k = 1,4, коэффициент трения f = 0,04. Решение. Fr k 1, 4 Из формулы (6.5) = 35 . Ft f 0,04 Пример 2. Механизм к двигателю состоит из последовательного соединения четырех передач (рис. 8.2): ременной плоской ( iр 2,5 ), прямозубой цилиндрической ( iзп 4 ), червячной ( iчп 40 ) и цепной втулочной ( iц 3 ). Определить передаточное 1 Наибольшие значения КПД соответствуют максимальным возможным. 169 отношение и КПД (см. табл. 8.1) механизма. Рассчитать необходимую мощность и частоту вращения вала двигателя, если выходной вал механизма должен вращаться с nвых 5 об/мин и передавать момент Tвых 50 Нм. Рис. 8.2. К примеру 2 Решение. 1. Передаточное отношение многозвенного механизма, состоящего из последовательного соединения четырех передач (четыре ступени): iпр iр iзп iчп iц 2,5 4 40 3 1200. 2. Минимальный КПД механизма, состоящего из последовательного соединения четырех передач (см. табл. 8.1) пр р зп чп ц 0,95 0,96 0,7 0,92 0,59 . 3. Полезная мощность Tвых nвых 50 5 26,2 Вт. 30 30 4. Необходимая мощность двигателя Pвх Pвых / пр 26,2 / 0,59 44,4 Вт. Pвых Tвых вых 5. Частота вращения вала двигателя nвх nвых iпр 5 1200 6000 об/мин. Пример 3. При экспериментальном исследовании тяговой способности ременной передачи были получены графики: кривая скольжения ( Ft ) и КПД ( Ft ) в зависимости от полезной нагрузки Ft при постоянной силе предварительного натяжения 170 ремня F0 200 Н. Определить оптимальное значение окружной силы Ft по рис. 8.3. Рис. 8.3. К примеру 3 Решение. 1. По рис. 8.3 оптимальное значение коэффициента тяги при максимальном значении КПД ( 0,95 ) к 0, 45 . 2. Значение окружной силы определим по формуле (7.1): Ft 2к F0 2 0, 45 200 180 Н. Тест по темам модуля 11 1. Фрикционные передачи наибольшее применение получили: 1 в редукторах 2 в мультипликаторах 3 в коробках передач 4 в вариаторах 2. Для увеличения долговечности ремня следует: 1 увеличить его натяжение 2 поставить натяжной ролик 3 увеличить диаметры шкивов 4 уменьшить диаметры шкивов 3. При увеличении скорости ремня: 1 2 уменьшается его увеличивается натяжение его износостойкость 3 уменьшается шум при работе 171 4 уменьшается его долговечность 4. При нормальной эксплуатации долговечность ремня ограничивается: 1 изнашиванием 2 усталостной прочностью 3 контактной выносливостью 4 прочностью на разрыв 5. Наибольшей точностью вращения обладает ременная передача с: 1 круглым ремнем 2 3 плоским ремнем клиновым ремнем 4 зубчатым ремнем 6. В состав привода (рисунок) входят четыре передачи. В какой передаче происходят наибольшие потери энергии? 1 В червячной 2 В зубчатой цилиндрической 3 В цепной 4 В ременной 7*. КПД двухступенчатой передачи (если КПД каждой ступени с учетом потерь в опорах з.п ) определяется по формуле: 1 2 з.п 2 з.п 3 4 з.п з.п 0,5з.п 8*. Вращающий момент на входном валу зубчатой передачи при известных моменте на выходном валу Т 2 и передаточном отношении: 1 Т 2 Т1i12 з.п 2 Т1 3 Т2 i12 з.п 172 Т1 4 Т2 i12 Т1 Т2 uз.п 9. Основными критериями работоспособности фрикционных передач являются: 1 2 прочность, прочность, износожесткость стойкость, теплостойкость 3 прочность, износостойкость, устойчивость 4 контактная и изгибная выносливость 10. Недостатком ременной передачи является: 1 сложность конструкции 2 повышенный шум при работе 3 повышенная нагрузка на валы 4 невысокие скорости 11. Для проектирования клиноременной передачи следует: 1 рассчитать шкив на прочность 2 рассчитать ремень на нагрев 3 подобрать ремень по передаваемой нагрузке 4 подобрать шкив по передаваемой нагрузке 12. Достоинством зубчато-ременной передачи является: 1 2 постоянство защита привода от передаточного перегрузок за счет проскальзывания отношения ремня 3 возможность пробуксовки при ударах 4 простота конструкции в сравнении с круглоременной передачей 13. Наиболее долговечной механической передачей является: 1 ременная 2 червячная 3 зубчатая 4 цепная 14. Для повышения передаваемого вращающего момента фрикционной передачи катки необходимо: 1 смазывать 2 сильнее прижать друг к другу 3 быстрее вращать 4 уменьшить в радиальных размерах 15. К достоинствам фрикционных передач относят 1 2 3 плавность работы большую мощность высокую точность 173 ЛИТЕРАТУРА 1. Атлас конструкций узлов и деталей машин / под ред. О.А. Ряховского. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2005. – 380 с. 2. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин: Учеб. пособие для техн. спец. вузов. – М.: Высш. школа, 2008. – 496 с. 3. Иванов М.Н., Финогенов ВА. Детали машин. – М.: Высш. школа, 2008. – 408 с. 4. Курмаз Л.В., Курмаз О.Л. Конструирование узлов и деталей машин: Справочное учебно-методическое пособие. – М.: Высш. школа, 2007. – 455 с. 5. Леликов О.П. Основы расчета и проектирования деталей и узлов машин. – М.: Машиностроение, 2007. – 464 с. 6. Мельников Б.Е. Сопротивление материалов/ П.А.Павлов, Л.К. Паршин, Б.Е. Мельников, В.А. Шерстнев. – СПб.–М.–Краснодар: Изд-во «Лань», 2007. – 560 с. 7. Подольский М.Е., Черенкова С.В. Основы расчета и конструирования механизмов, машин и приборов. Вып.2. Учеб. посо-бие. – СПб.: Изд. центр СПбГМТУ, 2001. – 47 с. 8. Решетов Д.Н. Детали машин. – М.: Машиностроение, 1989. – 496 с. 174 ОГЛАВЛЕНИЕ МОДУЛЬ 1 ......................................................................................... 3 Введение .............................................................................................. 3 Тема 1. Общие вопросы расчета и конструирования деталей машин ...................................................................... 4 1.1. Классификация машин по функциональному назначению............................................................................... 4 1.2. Основные виды передаточных механизмов .......................... 5 1.2.1. Передачи вращения ........................................................... 5 1.2.2. Передаточные механизмы возвратнопоступательного и колебательного движения. ............. 11 Тест по темам модуля 1.................................................................... 15 МОДУЛЬ 2 ....................................................................................... 18 Тема 1. Общие вопросы расчета и конструирования деталей машин ..................................................................... 18 1.3. Основные понятия и определения ....................................... 18 1.4. Общие требования к машинам, их деталям и узлам .......... 19 1.5. Основные критерии работоспособности деталей. .............. 19 1.6. Критерии прочности ............................................................. 20 1.6.1. Расчеты на прочность ..................................................... 20 1.6.2. Расчеты на усталостную прочность (выносливость) .................................................................... 22 1.7. Краткие сведения о материалах, применяемых в машиностроении ................................................................. 24 Тест по темам модуля 2.................................................................... 29 МОДУЛЬ 3 ....................................................................................... 32 Тема 2. Передача винт–гайка .......................................................... 32 2.1. Общие сведения о передаче винт–гайка. ............................ 32 2.2. Основные типы резьб ............................................................ 33 2.3. Трение в винтовой паре ........................................................ 36 2.4. Самоторможение в винтовой паре ....................................... 38 2.5. Коэффициент полезного действия винтовой пары ............ 39 2.5.1. Ведущее звено – винт...................................................... 39 2.5.2. Ведущее звено – гайка .................................................... 39 2.5.3. КПД механизма винт-гайка с самоторможением ......... 40 175 2.6. Основной критерий работоспособности ходовой резьбы винтового механизма. Проектировочный расчет ...................... 40 2.7. Расчеты на прочность ходовых винтов (пары винт–гайка).................................................................. 42 2.7.1. Проверка грузового винта на устойчивость ................. 42 2.7.2. Проверка грузового винта на прочность при совместном действии сжатия и кручения. .............. 43 Тест по темам модуля 3.................................................................... 48 МОДУЛЬ 4 ....................................................................................... 51 Тема 3. Зубчатые и червячные передачи ........................................ 51 3.1. Зубчатые передачи ................................................................ 51 3.1.1. Основные типы зубчатых передач и их сравнительная оценка ..................................................... 51 3.1.2. Основные определения теории зацепления .................. 53 3.1.3. Геометрические параметры цилиндрических прямозубых колес. Понятие о модуле зацепления ........ 57 Тест по темам модуля 4.................................................................... 63 МОДУЛЬ 5 ....................................................................................... 66 Тема 3. Зубчатые и червячные передачи ........................................ 66 3.1.4. Изготовление зубчатых колес. Способ копирования. Способ обкатки. ................................................................ 66 3.1.5. Конструкции зубчатых колес и материалы................... 69 3.1.6.Общие сведения о косозубых передачах........................ 70 Тест по темам модуля 5.................................................................... 75 МОДУЛЬ 6 ....................................................................................... 77 Тема 3. Зубчатые и червячные передачи ........................................ 77 3.1.7. Общие сведения о конических зубчатых передачах .......................................................................... 77 3.1.8. Особенности конструкций передач с коническими зубчатыми колесами.................................................................. 79 3.2. Червячная передача. .............................................................. 80 3.2.1. Общие сведения о червячных передачах ...................... 80 3.2.2. Особенности геометрии червяка .................................... 82 3.2.3. Геометрические соотношения в червячной передаче............................................................................ 85 3.2.4 Скольжение в червячной передаче ................................. 86 3.2.5. Особенности конструкции червячного колеса ............. 87 Тест по темам модуля 6.................................................................... 90 176 МОДУЛЬ 7 ....................................................................................... 93 Тема 3. Зубчатые и червячные передачи ........................................ 93 3.3. Силы в зацеплении зубчатых и червячных передач .......... 93 3.3.1. Силы в зацеплении прямозубых цилиндрических передач ............................................................................. 93 3.3.2. Силы в зацеплении косозубых цилиндрических передач ............................................................................. 94 3.3.3. Силы в зацеплении конических передач ....................... 95 3.3.4. Силы в зацеплении червячных передач ........................ 96 3.4. Критерии работоспособности зубчатых и червячных передач. Расчеты на прочность....................... 98 3.4.1. Виды разрушения зубьев ................................................ 98 3.4.2. Основные критерии работоспособности ....................... 99 3.4.3. Допускаемые контактные и изгибные напряжения. ................................................................... 100 Тест по темам модуля 7.................................................................. 104 МОДУЛЬ 8 ..................................................................................... 107 Тема 3. Зубчатые и червячные передачи ...................................... 107 3.4.4. Расчет зубьев на контактную выносливость. Максимальные контактные напряжения ..................... 107 3.4.5. Условие контактной выносливости для зубьев цилиндрических передач ............................................... 108 3.4.6. Проектировочный расчет цилиндрической передачи из условия контактной выносливости зубьев .............................................................................. 110 3.4.7. Расчет зубьев на изгибную выносливость .................. 110 3.4.8. Расчеты на выносливость конических передач .......... 113 3.4.9. Расчеты на выносливость червячных передач............ 114 Тест по темам модуля 8.................................................................. 118 МОДУЛЬ 9 ..................................................................................... 121 Тема 4. Многозвенные зубчатые механизмы ............................... 121 4.1. Передаточное отношение многоступенчатой передачи ............................................................................... 121 4.2. Передаточное отношение последовательного ряда ......... 123 4.3. Понятие о планетарных передачах .................................... 124 4.3.1. Общие сведения о планетарной передаче ................... 124 4.3.2. Принцип действия планетарной передачи .................. 126 177 4.3.3. Кинематический расчет планетарных передач ........... 126 4.3.4. Критерии работоспособности планетарных передач ........................................................................... 130 Тест по темам модуля 9.................................................................. 134 МОДУЛЬ 10 ................................................................................... 137 Тема 4. Многозвенные зубчатые механизмы ............................... 137 4.4. Волновые передачи ............................................................. 137 4.4.1. Общие сведения о волновой передаче ........................ 137 4.4.2. Принцип действия и передаточное отношение волновой передачи ........................................................ 138 4.4.3. Особенности конструкции волновых передач ............ 139 4.4.4. Основные критерии работоспособности волновых передач .......................................................... 140 Тема 5. Цепные передачи............................................................... 140 5.1. Общие сведения о цепных передачах ................................ 140 5.2. Виды приводных цепей....................................................... 142 5.3. Особенности работы цепных передач ............................... 145 5.4. Силы в цепных передачах................................................... 147 5.5. Критерии работоспособности цепных передач ................ 148 5.6. Расчеты цепных передач ..................................................... 149 5.6.1. Расчет по условию износостойкости шарниров ......... 149 5.6.2. Проверка цепи на прочность ........................................ 150 Тест по темам модуля 10................................................................ 152 МОДУЛЬ 11 ................................................................................... 155 Тема 6. Фрикционные передачи .................................................... 155 6.1. Общая характеристика фрикционных передач ................. 155 6.2. Силы в контакте цилиндрической фрикционной передачи ............................................................................... 157 6.3. Скольжение во фрикционных передачах .......................... 158 6.4. Критерии работоспособности фрикционных передач ..... 160 Тема 7. Ременные передачи ........................................................... 160 7.1. Общая характеристика ременных передач ....................... 160 7.2. Виды приводных ремней .................................................... 162 7.3. Силы и напряжения в ременных передачах ...................... 163 7.4. Основные критерии работоспособности ........................... 165 7.5. Передача зубчатым ремнем ................................................ 166 Тема 8. Коэффициент полезного действия механической передачи..................................................... 167 178 8.1. Коэффициент полезного действия зубчатой передачи ............................................................................... 167 8.2. Коэффициент полезного действия червячной передачи ............................................................................... 168 8.3. Коэффициент полезного действия многозвенного механизма ............................................................................. 168 Тест по темам модуля 11................................................................ 171 Литература ...................................................................................... 174 179 Учебное издание Черенкова Светлана Валентиновна Иванова Марина Александровна Пазилова Ульяна Анатольевна ДЕТАЛИ МАШИН Механические передачи Редактор Т.Н. Альбова Корректор Т.Б. Симоненко Верстка Т.В. Лебедевой Подписано в печать 10.01.2017. Формат 60х90/16. Бумага писчая. Печать офсетная. Уч.-изд. л. 10,0. Усл. печ. л. 11,3. Зак. 5022. Тир.300. Издательство СПбГМТУ. 190008, СПб, Лоцманская ул., 10. 180 Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» С.В. ЧЕРЕНКОВА, М.А. ИВАНОВА, У.А. ПАЗИЛОВА ДЕТАЛИ МАШИН И ОСНОВЫ КОНСТРУИРОВАНИЯ Механические передачи Учебное пособие Санкт-Петербург 2017 181