ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ
УНИВЕРСИТЕТ имени академика С. П. КОРОЛЕВА
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)»
Л. В. МОРОЗОВ
ЭКСПЕРИМЕНТАЛЬНАЯ АЭРОМЕХАНИКА
С А М А Р А 2010
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ
УНИВЕРСИТЕТ имени академика С. П. КОРОЛЕВА
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)»
Л. В. МОРО ЗО В
ЭКСПЕРИМЕНТАЛЬНАЯ АЭРОМЕХАНИКА
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
САМАРА
Издательство СГАУ
2010
УДК СГАУ: 533.6.011(075)
ББК 22.253
М 801
Рецензенты: д-р техн. наук, проф. В. JI. Б а л а к и н,
д-р техн. наук, проф. Н. И. К л ю е в
М 801
Морозов Л.В.
Экспериментальная аэромеханика: учеб. пособие / Л.В. М оро­
зов. - Самара: Изд-во Самар, гос. аэрокосм, ун-та, 2010. - 44 с.
ISBN 978-5-7883-0760-2
Учебное пособие содержит описание лабораторных работ, вклю­
чающее основные сведения о рассматриваемых физических процес­
сах, математическую модель измеряемых и результирующих парамет­
ров, порядок проведения экспериментов и форму представления их
результатов.
Предназначено для студентов, изучающих механику воздействия
внешней среды на движущийся в ней летательный аппарат, при кур­
совом и дипломном проектировании.
УДК СГАУ: 533.6.011(075)
ББК 22.253
ISBN 978-5-7883-0760-2
© Самарский государственный
аэрокосмический университет, 2010
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.........................................................................................................
Е РАСПРЕДЕЛЕНИЕ ДАВЛЕНИЯ ПО ПОВЕРХНОСТИ ТЕЛА
ВРАЩЕНИЯ ПРИ ДОЗВУКОВЫХ СКОРОСТЯХ ПОТОКА.................
2. МОМЕНТНАЯ ХАРАКТЕРИСТИКА ЛЕТАТЕЛЬНОЕО
АППАРАТА........................................................................................................
3. СКОС ПОТОКА ЗА КРЫЛОМ ЛЕТАТЕЛЬНОЕО АППАРАТА
4. ВИЗУАЛИЗАЦИЯ КОСОЕО СКАЧКА УПЛОТНЕНИЯ..........................
ЗАКЛЮЧЕНИЕ...................................................................................................
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ....................................
4
5
18
29
36
42
43
3
ВВЕДЕНИЕ
Аэромеханикой называется наука, изучающая законы движения газов
и их взаимодействие с обтекаемыми ими телами.
Теоретическая аэромеханика в настоящее время достаточно развита,
но еще не настолько, чтобы решать многообразные практические задачи,
выдвигаемые наукой и техникой. Поэтому в аэромеханике активно разра­
батываются методы экспериментального исследования, которые образуют
самостоятельную дисциплину - экспериментальную аэромеханику.
Экспериментальная аэромеханика позволяет не только проверить раз­
работанные теории, но и является источником создания более точных тео­
рий на основе явлений и фактов, обнаруженных опытным путем.
В данном учебном пособии описываются лабораторные работы по
экспериментальному исследованию различных аэродинамических процес­
сов, возникающих при движении летательных аппаратов в воздушной
среде, а также экспериментальные установки и измерительные устройст­
ва, приборы и оборудование, используемые в рассматриваемых экспери­
ментах.
4
1.
РАСПРЕДЕЛЕНИЕ ДАВЛЕНИЯ
ПО ПОВЕРХНОСТИ ТЕЛА ВРАЩЕНИЯ
ПРИ ДОЗВУКОВЫХ СКОРОСТЯХ ПОТОКА
Ц е л ь р а б о т ы : экспериментальное определение распределения
величины коэффициента давления вдоль тела вращения в виде цилиндра с
конической носовой частью при различных углах атаки и крена и вычис­
ление величины коэффициентов нормальной и продольной сил.
Общие сведения
Тело вращения в виде цилиндрической поверхности с конической но­
совой частью является основной составной частью аэродинамических
схем многих летательных аппаратов. Отдельные типы ракет имеют корпус
в виде рассматриваемого тела вращения как единственного элемента кон­
струкции. В связи с этим в аэродинамических исследованиях большое ме­
сто занимает изучение характера обтекания тел вращения и динамики воз­
действия потока на тело вращения.
Экспериментальное изучение обтекания тел вращения связано в ос­
новном с исследованием обтекания их моделей, так как натурные объекты
имеют значительные линейные размеры и их аэродинамические испыта­
ния не всегда возможны из-за ограниченных размеров аэродинамических
труб. Результаты этого изучения могут непосредственно использоваться
для определения аэродинамических характеристик летательного аппарата,
если при проведении экспериментов выполнены условия физического по­
добия модельного и натурного объектов и процессов движения воздушно­
го потока.
Экспериментальное исследование аэродинамических свойств тел
вращения различных форм и размеров можно проводить двумя способа­
ми. Первый способ состоит в измерении распределения нормального дав­
ления и касательного напряжения, действующих на поверхность тела
вращения, с последующим расчетом необходимых аэродинамических па­
раметров. Второй способ состоит в проведении весовых испытаний, по­
зволяющих определять суммарные аэродинамические силы и моменты,
действующие на модель в целом. В данной лабораторной работе опреде­
ляются коэффициент нормальной силы и коэффициент продольной силы
сопротивления давления носовой части на основании данных о распреде­
лении давления по поверхности тела вращения.
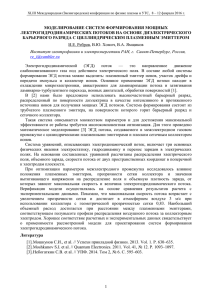
На каждую точку поверхности тела вращения, расположенного в воз­
душном потоке под углом атаки а , действует избыточное статическое
давление со стороны окружающей среды Д/5, направленное вдоль еди­
ничного вектора внешней нормали к поверхности Я0 (рис. 1.1 ).
5
Рисунок 1.1. Системы координат
Избыточное давление принимается положительным, если вектор из­
быточного давления Ар направлен противоположно единичному вектору
внешней нормали к поверхности Л° в точке приложения давления, и от­
рицательным, если направлен вдоль вектора нормали.
При несимметричном обтекании тела вращения воздушным потоком
давление является переменным по величине, которая зависит от коорди­
нат точки поверхности. Для задания положения точки поверхности рас­
сматривается связанная с телом поточная система координат oxyz , нача­
ло которой помещено в вершине носовой части. Ось ох совмещена с
осью симметрии тела и направлена от его носовой части в сторону донной
части. Ось оу лежит в плоскости угла атаки и направлена в сторону его
увеличения. Ось oz дополняет систему до правой.
Для нахождения элементарной силы давления на поверхности тела
задается элементарная площадка da, в пределах которой величина избы­
точного давления Ар принимается постоянной. Для определения величи­
ны площадки проводятся четыре секущие плоскости. Две плоскости про­
водятся через продольную ось тела вращения, из которых одна плоскость
оху' проходит под углом у к плоскости оху , а вторая оху" - под углом
dy к плоскости оху' . Две другие плоскости проводятся ортогонально
продольной оси на расстоянии х и х + dx от вершины носовой части.
Эти четыре плоскости задают элементарную площадку d a на криволи­
нейной поверхности тела вращения (рис. 1.1 ).
6
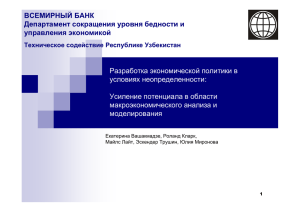
Величина площадки определяется при рассмотрении сечения тела
вращения плоскостью оху' ( рис. 1.2 ). В связи с малостью линейных
размеров площадки и пренебрегая скошенностью прямолинейных сторон
вдоль образующей конуса, ее форма принимается прямоугольной с дли­
ной прямолинейной стороны dl и длиной дуги окружности радиусом г
величиной rdy с площадью поверхности dcr.
d<j = r(x)dydl.
(IX
у/
(IP
Рисунок 1.2. Элементарные нормальная и продольная силы давления
Выражая сторону dl через приращение координаты dx и угол полураствора конуса 0 , площадь примет вид
do = r(x)
dx
dy.
COS0
На элементарную площадку действует сила dP от избыточного давления
Ар:
dx
dP = A p -r(x)------d y ,
А р = р - р ао,
COS0
где p - статическое давление возмущенного воздушного потока в точке
поверхности; р сл - статическое давление невозмущенного потока.
Выражая избыточное давление Ар через коэффициент давления ср ,
элементарная сила давления dP представляется в виде:
(.P~Poo) = cp (x,y)qaD,
ср (х,у) = Р
Pf ,
dP = ^°° сp {x,y)r{x)dxdy,
COS0
где </ос, рх, и К» - скоростной напор, плотность и скорость невозмущен­
ного потока соответственно.
Элементарная нормальная сила dY' представляет собой проекцию
элементарной силы давления dP на ось оу' , а элементарная продольная
сила d X - проекцию силы давления dP на ось ох:
d Y f = dP cos 9 ,
d X = dP sin 9 ,
dY' = - q ^ c p (x,y)r(x)dxdy ,
dX = q ^ c p (x,y)r(x)tgQdxdy ..
(11)
Элементарная нормальная сила тела вращения dY является проекцией
элементарной нормальной силы dY' на нормальную ось оу:
dY - d Y f cosy ,
dY = - q ^ c p (x, y)r(x) cos уdxdy .
(12)
Для определения величин продольной и нормальной сил, действую­
щих на все тело вращения, необходимо проинтегрировать выражения (1.1)
и (1.2) в пределах изменения угла у от 0 до 2% и координаты х от О
до L :
2%
X = q^ j
L
\[cp (x,y)r(x)tg®\dx dy
2%
(1.3)
L
\[cp {x,y)r{x)]dx cosy dy .
(1.4)
Выражения для продольной ( 1.3 ) и нормальной ( 1.4 ) сил удобнее
представить в безразмерных переменных текущей координаты и радиуса:
г = *
L
>?00 = 2 * 0
.
( 1 5 )
D
Размерные величины dx и г(х) выражаются через безразмерные
dx = Ldx , r(x) = —Z)r(x).
2
После подстановки и изменения пределов интегрирования выражения сил
принимают вид:
2%
1
X = - q ^ D L \ \[cp {x,y)r{x)tgQ]dx dy,
2
о о
2к
Y = - - qaaD L \ \[cp (x,y)r(x)]djc cosydy.
2
о
( 1.6 )
(1.7)
Продольная сила X и нормальная сила 7, действующие на тело
вращения, выражаются через коэффициенты продольной и нормальной
сил с х и с у , скоростной напор qCX) и площадь миделя S М:
X
С X Q ооS М
Y
5
Су {^00 S м
SM ~ Л
/У
( 1 .8 )
Из сравнения выражений продольной и нормальной сил (1.6 ), ( 1.7 ) и
( 1.8 ) определяются коэффициенты продольной и нормальной сил:
т 2п
- V \[cp {x,y)r{x)tgQ]dx dy.
лD о
т
сУ
-
2%
\[cp (x,y)r(x)]dx cosydy.
2
лБ о
Угол крена у отсчитывается от вертикальной плоскости оху, в кото­
рой лежат вектор скорости невозмущенного потока Д и угол атаки а.
Поэтому обтекание тела вращения является симметричным относительно
этой плоскости и интегрирование по углу у можно проводить в пределах
от 0 до 7г:
L %
г
сх = 4
Су = -4
I
лБ о
L лг
!
\[cp (x,y)r(x)tg®\dx dy
\[cp (x,y)r(x)]dx cos y d y.
лВ0
Вводя в рассмотрение удлинение тела вращения
^
.
D
выражения коэффициентов продольной и нормальной сил примут вид:
:
4
j \[cp (x,y)r(x)tg®]dx dy,
(1.9)
710
'У = -4 —J \[cp (x,y)r(x)]dx cosy d y .
ЛО
( 1.1 0 )
Для тела вращения с конической носовой частью длиной LH зависи­
мость радиуса от координаты поперечного сечения г(х) имеет различ­
ный вид для конуса и цилиндра.
Для конической части х < LH текущий радиус г ( х ) определяется
координатой х и углом полураствора конуса 0 :
r(x) = x-t g9.
9
В безразмерных переменных х < LH зависимость г(х) имеет вид:
?{х) = 2 /а7- tg0,
L
l±L
ьн ~
~ =
L
D
Для цилиндрической части х > LH текущий радиус г ( х ) является посто­
янным, и в безразмерных переменных х >Гя зависимость f ( x) имеет вид
г (х) = 1.
Подынтегральная функция
/ Х(х,у) = c^(x,y)r(x)tg0
во внутреннем
интеграле выражения коэффициента продольной силы ( 1 . 9 )
лК
j f x ( x , y ) d x dy
= 4 - J
71 О
имеет различный вид для конической и цилиндрической частей
2Xx-cp (x,y)tg2Q,
x< L H,
О,
х > LH .
f x(x >У) =
( 1.1 2 )
Подынтегральная функция f y (х, у) = Ср (х, у)Р(х) во внутреннем ин­
теграле выражения коэффициента нормальной силы (1.10 )
_ _ 4 - J \ f y (x,y)dx cosy dy
71 0 о
(1.13)
имеет различный вид для конической и цилиндрической частей:
^2Ях •c/?(x,y)tg0,
/у (х ,у )
c J x , у),
Р
V ^ v ? ! }■>
х<Гя ,
Х>1
л.
^
(1.14)
.
Таким образом, для вычисления значений коэффициентов продольной
и нормальной сил необходимо иметь зависимости распределения давле­
ния в продольных плоскостях вдоль по поверхности тела вращения при
различных положениях этих плоскостей.
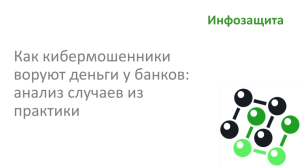
Описание установки
Для определения статического давления в различных точках тела
вращения в открытой рабочей части аэродинамической трубы между со­
плом 1 и диффузором 5 на оси 3 установлена модель тела вращения 2 .
С помощью механизма 4 вручную можно раздельно изменять угол атаки
а и угол крена у ( рис. 1.3 ). Геометрические размеры модели и парамет­
ры аэродинамической трубы приведены в табл. 1.1.
ю
Рисунок 1.3. Схема установки
Таблица 1.1 - Параметры модели и экспериментальной установки
Параметр
Обозначе­ Размерность
Величина
ние
L
м
0,482
Длина модели
Длина носовой конической части
м
0,145
Lн
D
м
Диаметр цилиндрической части
0,064
град
25,0
Угол полураствора конуса
в
Коэффициент сопла трубы
1,09
Xт
Коэффициент поля скоростей
0,98
И
п
Температурный коэффициент
0,96
к
кгс мм '
Коэффициент байкового манометра
кгс л/л/'
Коэффициент батарейного манометра
кб
—
с р
—
—
q
Параметры воздушного потока на выходе из сопла трубы - скорости
V(х , статического давления р х и плотности р * - принимаются в каче­
стве параметров невозмущенной среды. В окрестности обтекаемого тела
величины этих параметров изменяются. Приемниками статического дав­
ления воздушной среды на поверхность тела вращения являются 24 дре­
нажных отверстия малого диаметра, продольные оси которых ортогональ­
ны поверхности тела вращения в местах их расположения. Отверстия рас­
полагаются вдоль тела вращения в одной из продольных плоскостей сим­
метрии тела. Нумерация отверстий ведется от вершины носовой части до
конца цилиндрической части. Безразмерные координаты отверстий при­
ведены в табл. 1.2.
Каждое отверстие соединено при помощи трубопровода с отдельной
трубкой батарейного манометра 6 в ее верхней части. Все трубки бата­
рейного манометра в их нижней части соединены между собой, образуя
систему сообщающихся сосудов. Под действием давления уровень жидко­
сти в трубке опускается, а при наличии разряжения - поднимается. Раз­
11
ность координат уровней жидкости в двух трубках пропорциональна раз­
ности давлений, подаваемых в эти трубки. Избыточное давление Apt в
фиксированной точке i поверхности тела вращения пропорционально
разности уровня жидкости ht в трубке манометра, соответствующей этой
точке, и уровня жидкости hCXl в трубке манометра, открытой в атмосферу.
i
1.
2.
3.
4.
5.
6.
Таблица 1.2 - Безразмерные координаты дренажных отверстий
i
i
i
Хг
Хг
Хг
0,0
0,043
0,089
0,133
0,175
0,218
7.
8.
9.
10.
11.
12.
0,262
0,300
0,342
0,385
0,426
0,468
13.
14.
15.
16.
17.
18.
0,510
0,552
0,593
0,635
0,677
0,718
19.
20.
21.
22.
23.
24.
Хг
0,760
0,800
0,842
0,884
0,925
0,967
Для определения величины скоростного напора невозмущенного по­
тока используется бачковой манометр 7, измеряющий разность статиче­
ских давлений в двух поперечных сечениях аэродинамической трубы - в
форкамере и на срезе сопла. Измерение скоростного напора проводится по
методу перепада давления [ 1 ].
Корпус модели дренирован только в одном продольном сечении, ко­
торое принимается за вертикальную плоскость симметрии тела вращения.
Для определения давления в других продольных плоскостях, смещенных
относительно вертикальной плоскости симметрии на угол крена у , необ­
ходимо поворачивать модель вдоль продольной оси по углу крена на тре­
буемую величину в пределах от 0° до 180°.
Порядок выполнения лабораторной работы
1. Закрепленную в рабочей части аэродинамической трубы модель те­
ла вращения с помощью механизма 4 установить под заданным углом
атаки а с начальным нулевым значением угла крена у = 0 . При таком
положении модели дренажные отверстия, являющиеся приемниками ста­
тического давления, будут располагаться в вертикальной плоскости сим­
метрии модели на верхней части ее корпуса.
2. Включить аэродинамическую трубу.
3. После прекращения колебаний уровней жидкости в трубах бата­
рейного манометра вследствие нестационарного характера обтекания в
начальный период движения потока и установления динамического рав­
новесия жидкости определить координаты уровней жидкости h ,, z = 1,2,
..., п, п = 24 во всех трубках манометра и занести значения координат
уровней в табл. 1.3.
12
4. При неизменном угле атаки установить следующий угол крена. Ес­
ли угол крена у превысит значение 180°, то перейти к пункту 5. В про­
тивном случае повторить операции пункта 3 .
5. Занести в табл. 1.3 показание уровня жидкости Л1 в трубке байко­
вого манометра и координату уровня жидкости
в трубке батарейного
манометра, воспринимающей давление окружающей среды.
6. Выключить аэродинамическую трубу. Эксперимент закончен.
Таблица 1.3 - Результаты эксперимента
у , град
0
45
90
135
hi,
hi,
C
p
i
hi,
C
p
i
hi,
Cp i
Сp i
MM
MM
MM
MM
i
1.
2.
3.
180
hi,
MM
Сp i
0,0
0,043
0,089
22.
0,884
23.
0,925
24.
0,967
h x MM
A l , мм
Обработка результатов эксперимента
Исходными данными для определения коэффициентов продольной и
нормальной сил с х и с у являются параметры модели и эксперимен­
тальной установки ( табл. 1.1), безразмерные координаты дренажных от­
верстий ( табл. 1.2 ), результаты измерений ( табл. 1.3 ), а также значе­
ния коэффициентов байкового манометра kq и батарейного манометра кб
(табл. 1.1 ), зависящих от угла наклона трубок манометров к горизон­
тальной плоскости.
Обработка результатов эксперимента проводится в следующем по­
рядке.
1.
Вычисляется величина скоростного напора невозмущенного пото­
ка на выходе из сопла аэродинамической трубы
qда = А/ • П • Хт •\хср •k q ,
кгс / м 2 .
2.
Определяются значения коэффициента давления для всех точек
поверхности модели, для которых измерялись высоты уровней жидкости в
трубках манометра, и заносятся в табл. 1.3:
с„ =
—f a -* » > • * »
,
i = 1, 2 , . . . , 2 4 .
q,
13
3. По дискретным значениям коэффициентов давления cpi{xt ) из
табл. 1.3 для каждого значения угла крена у строятся графические зави­
симости величины коэффициента давления ср (х, у) от безразмерной ко­
ординаты л: вдоль тела вращения во всем диапазоне изменения от 0 до
1 ( рис 1.4 ).
ср
О
+1
о
0,3
1
X
Рисунок 1.4. Распределение коэффициента давления
вдоль тела вращения при угле крена у
4.
ния
На основании выражений ( 1 . 1 2 ) и ( 1 . 1 4 ) вычисляются значе­
подынтегральных
функций
f x(x,y) = cp (x,y)r(x)tgQ
и
f v (x,y) = cp (x,y)r(x) для внутренних интегралов ( 1 . 9 ) и ( 1 . 1 0 ) и по­
мещаются в табл. 1.4 и 1.5.
Таблица 1.4 - Значения подынтегральной функции / Х(х,у)
i
у.
1.
2.
3.
0,0
0,043
0,089
22/
23.
24.
0,884
0,925
0,967
0
45
у , град
90
135
180
Таблица 1.5 - Значения подынтегральной функции f y{x,y)
14
i
у.
1.
2.
3.
0,0
0,043
0,089
22/
23.
24.
0,884
0,925
0,967
0
45
у , град
90
135
180
5.
По дискретным значениям подынтегральных функций из табл.
1.4 и 1.5 для каждого значения угла крена у строятся графические зави­
симости величин подынтегральных функций f x {x,у) и f y (x,у) от без­
размерной координаты л: вдоль тела вращения во всем диапазоне изме­
нения от 0 до 1 (рис. 1.5, 1.6).
о
+i
+1
о
1 X
0,3
Рисунок 1.5. Подынтегральная
функция f x(x ,y ) для угла крена у
1 X
0,3
Рисунок 1.6. Подынтегральная
функция f ( x , y ) для угла крена у
6.
Методами численного интегрирования [ 1 ] по имеющимся гра­
фическим зависимостям ( рис. 1.5 и 1.6 ) для каждого значения угла
крена у определяются значения внутренних интегралов ( 1 . 9 ) и ( 1 . 1 0 )
и заносятся в табл. 1.6.
1
1
Fx {y) = \ f x {x,y)dx,
Fy {y) = \ f y {x,y)dx .
о
о
Таблица 1.6 - Значения интегралов Fx(y) и Fv(y)
у, град
0,0
45,0
90,0
135,0
180,0
Fi r )
Fi r)
7.
Для каждого значения угла крена у определяются значения по­
дынтегральных функций Фх (у ) = Fx {у) и Фу (у ) = Fv {у) cos у внешних
интегралов ( 1 . 1 1 ) и ( 1 . 1 3 ) и заносятся в табл. 1.7.
у, град
Ф х
(у)
Ф у
(у)
0,0
45,0
90,0
135,0
180,0
8.
По дискретным значениям подынтегральных функций Фх (у) и
Фу (у) из табл. 1.7 строятся их графические зависимости от угла крена у
в диапазоне от 0 до л- (рис. 1.7 и 1.8).
15
о
Я
О
7 , рад
Рисунок 1.7. Подынтегральная
функция Ф; ( у)
Л
7 , рад
Рисунок 1.8. Подынтегральная
функция Фу ( у)
9. Методами численного интегрирования [ 1 ] определяются значе­
ния внешних интегралов
S x = { ф х (у)</у ,
S y = j O y ( y) dy .
о
о
10. Вычисляются значения коэффициентов продольной и нормаль­
ной силы ( 1 . 1 1 ) и (1.13):
.
X
с х = 4 —S x ,
71
/1^0
c v = - 4 —S v .
'
71
Полученные значения коэффициентов продольной и нормальной силы те­
ла вращения являются итогом лабораторной работы.
Контрольные вопросы
1. Что такое статическое давление воздушного потока ?
2. Каким образом статическое давление связано со скоростью потока?
3. Как определяется полное давление воздушного потока ?
4. Что является приемником статического давления воздушного по­
тока в разных точках поверхности модели ?
5. Как измеряется полное давление воздушного потока ?
6. Что такое коэффициент давления ?
7. Чему должно быть равно значение коэффициента давления в точке
под номером 1 при нулевом угле атаки ?
8 Почему коэффициент давления имеет минимальную величину в
точке перехода от конической носовой части модели к цилиндрической ?
9. Каким образом измерить статическое давление невозмущенного
потока ?
10. Как определяется величина скоростного напора невозмущенного
потока ?
16
11. Как влияет удлинение тела на коэффициент нормальной силы ?
12. Какие системы координат служат для определения нормальной и
подъемной сил ?
13. В чем разница между нормальной и подъемной силами летатель­
ного аппарата ?
14. Какое направление продольной силы считается положительным ?
15. Как определяются угол атаки, угол скольжения и угол крена ?
16. По какому правилу определяются знаки углов атаки, скольжения и
крена ?
17. Что такое коэффициенты аэродинамических сил и являются ли
они критериями подобия ?
18. Что принимается за характерную площадь летательного аппарата
при определении аэродинамических сил ?
19. При каком условии коэффициент нормальной силы обращается в
ноль ?
20. При какой ориентации летательного аппарата коэффициент про­
дольной силы имеет минимальную величину ?
17
2. МОМЕНТНАЯ ХАРАКТЕРИСТИКА ЛЕТАТЕЛЬНОГО
АППАРАТА
Ц е л ь р а б о т ы : экспериментальное определение аэродинамиче­
ских сил и моментов, действующих на модель летательного аппарата при
различных значениях угла атаки, и вычисление значений коэффициента
аэродинамического момента тангажа в зависимости от угла атаки.
Общие сведения
При движении воздушного потока относительно летательного аппа­
рата на каждую точку его поверхности действуют поверхностные аэроди­
намические силы. Результирующей этих сил является вектор полной аэ­
родинамической силы ДДоцР), приложенный в центре давления D (
рис. 2.1 ). Величина и направление полной аэродинамической силы, а
также координаты ее центра давления являются переменными и зависят от
ориентации аппарата относительно воздушного потока по углам атаки а
и скольжения /? . Центр давления D не совпадает с центром масс аппа­
рата С и его положение относительно центра масс определяется радиу­
сом-вектором fd с началом в центре масс и концом в центре давления. В
результате возникает вектор аэродинамического момента относительно
центра масс М а = (fd x R a), определяемый как векторное произведение
радиуса-вектора fd и вектора полной аэродинамической силы ^ а (ос,(3).
Направление вектора момента и его величина формируют характер дви­
жения летательного аппарата относительно его центра масс.
V
Рисунок 2.1. Аэродинамический момент
Для прогнозирования относительного движения летательного аппара­
та аналитическими или численными методами вектор момента М а про­
ецируется на оси связанной системы координат Oxyz . Начало 0 системы
совмещается с центром масс аппарата С. Ось Ох направляется по про­
18
дольной оси аппарата в сторону его носовой части. Ось Оу располагается
в вертикальной плоскости симметрии аппарата и направляется в сторону
его верхней части. Ось Oz дополняет систему до правой ( рис. 2.1 ). Про­
екциями вектора момента М а = ( М Х, М V, M z ) являются момент крена
М х , момент рыскания M v и момент тангажа M z .
При нулевой величине угла скольжения /3 = 0 вектор полной аэроди­
намической силы Ra(a) =(X(a)j(a)) лежит в вертикальной плоскости
симметрии Оху, и проекциями его на оси Ох и Оу являются продольная
сила х и нормальная сила Y соответственно. Для постоянной скорости
воздушного потока величины аэродинамических сил и положение центра
давления определяются только величиной угла атаки. Положение центра
давления задается радиусом-вектором rd = (xd , y d ) с координатами xd и
y d по осям Ох и Оу соответственно. При этом вектор момента имеет
только одну проекцию М z на ось Oz при нулевых значениях остальных
проекций М х = 0 и M v = 0 ( рис. 2.2 и 2.3 ).
Рисунок 2.2. Положительный момент тангажа
Величина момента тангажа М 2 определяется продольной Х(а) и
нормальной 7 (a ) составляющими полной аэродинамической силы и ко­
ординатами центра давления х d и у d.
M z (а) = Y (а) х d +X (а) у d .
(2.1)
При положительном значении угла атаки а > 0 нормальная сила
7 ( а ) положительна и направлена вдоль нормальной оси Оу, а при отри­
цательном угле атаки а < 0 нормальная сила отрицательна и направлена
19
против оси Оу. Продольная сила X ( а ) всегда направлена против оси Ох
независимо от знака угла атаки и это направление продольной силы
принимается за положительное. При положительной величине момента
Mz (а) > 0 вектор M z {ос) совпадает с направлением оси Oz ( рис. 2.2 ), а
при отрицательной величине момента М z ( а ) < 0 вектор M z {ос) про­
тивоположен оси Oz ( рис. 2.3 ).
Рисунок 2.3. Отрицательный момент тангажа
Для летательных аппаратов достаточно удлиненной формы, близкой к
телу вращения, длина которых многократно превышает диаметр миделевого сечения, центр давления располагается вблизи продольной оси или
на самой оси. При этом поперечная координата центра давления у d во
много раз меньше его продольной координаты х d и поэтому знак момен­
та в основном определяется координатой центра давления х d по про­
дольной оси.
Момент тангажа М z ( а ) представляется в виде произведения коэф­
фициента момента с mz ( а ) , скоростного напора невозмущенного потока
q * , площади миделя аппарата S м и его характерного линейного раз­
мера L:
q
M I ( a ) = c „ ( a ) q . c S u . L , =Pc°F
,
(2.2)
2
4
где р * - плотность невозмущенного потока, V ,х - скорость невозму­
щенного потока, D м ~ диаметр миделя аппарата, L - длина аппарата.
Из равенства моментов ( 2.1 ) и ( 2.2 ) определяется коэффициент
момента
20
^
x d , X (°0
7 (a )
Ясс$м
L
yd
Ясс$м
L
Используя выражения коэффициентов продольной и нормальной сил, а
также безразмерных координат:
сх(°с) =
Х(а)
Су
(ос) =
Ясс^М
7 (a )
d
xd =
Ясс^М
yd =
L
y_d_
L
коэффициент момента представляется в виде
cmz (°0 = Су (a) -Xd + c x (a) •y d .
(2.3)
Моментной характеристикой летательного аппарата является зависи­
мость коэффициента момента тангажа от угла атаки [ 2 ] ( рис. 2.4 )
Сmz
С mz ( О.) .
Графическим выражением моментной характеристики является кривая,
пересекающая ось углов атаки при значении а бал , называемым баланси­
ровочным углом атаки. При этом угле атаки коэффициент момента равен
нулю:
С m z ( СЬбал )
б.
При неуправляемом движении в атмосфере статически устойчивого лета­
тельного аппарата под влиянием действующих на него переменных по ве­
личине и направлению аэродинамических сил и моментов он стремится к
положению, при котором угол атаки принимает значение балансировоч­
ного.
Г'
ini
бал
a
Рисунок 2.4. Моментная характеристика летательного аппарата
Таким образом, для построения моментной характеристики летатель­
ного аппарата необходимо определить зависимости коэффициентов про­
дольной и нормальной сил от угла атаки и координаты центра давления в
связанной системе координат. По этим экспериментально полученным па­
раметрам вычисляется значение коэффициента момента относительно по­
перечной оси, проходящей через центр масс летательного аппарата.
21
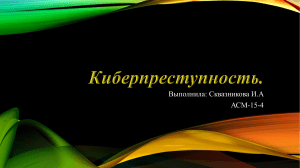
Описание установки
Для определения аэродинамических сил и моментов, действующих на
летательный аппарат, в открытой рабочей части аэродинамической трубы
между соплом 1 и диффузором 5 на стержне тензовесов 3 установлена
модель аппарата 2 длиной L с диаметром миделя D M (рис. 2.5).
Рисунок 2.5. Схема установки
Тензовесы крепятся в держателе 4, соединенным с механизмом 6
для изменения угла атаки а и угла скольжения /? модели. Электриче­
ский сигнал с тензодатчиков поступает в блок сбора информации 7, где
он преобразуется в цифровой код. После чего цифровой сигнал обрабаты­
вается в компьютере с использованием соответствующих алгоритмов и на
мониторе 9 отображается результат обработки в виде таблицы числовых
значений сил и моментов, действующих на модель аппарата.
Скорость воздушного потока V (Х) в дозвуковой аэродинамической
трубе может изменяться в пределах от 1 м/с до 50 м/с. Во время экспе­
римента поддерживается постоянная заданная скорость потока. Угол
скольжения задается нулевым /? = 0, и угловые перемещения модели осу­
ществляются в вертикальной плоскости аэродинамической трубы измене­
нием угла атаки а в пределах от - 5° до +15°.
При изменениях угла атаки на модель аппарата действуют аэродина­
мические силы в виде продольной силы X т и нормальной силы Y т ,
измеряемые в системе координат тензовесов Т х тут zт . Начало системы
расположено в точке Т на оси тензовесов. Ось Т х т направлена вдоль
оси тензовесов в сторону носовой части модели аппарата. Ось Т у т лежит
в вертикальной плоскости аэродинамической трубы и направлена в сторо­
22
ну увеличения угла атаки. Ось Т zT дополняет систему до правой. Про­
дольная ось тензовесов совпадает с продольной осью модели летательного
аппарата ( рис. 2.6 ). Аэродинамические силы приложены в плоскости
симметрии аппарата Т х тут, совпадающей с вертикальной плоскостью аэ­
родинамической трубы. Для симметричного тела вращения центр давле­
ния полной аэродинамической силы расположен на продольной оси сим­
метрии Т х т.
Положение точки Т задается в связанной с моделью системе коорди­
нат О х 0 у о zo . Начало системы О находится в вершине носовой части
аппарата на его продольной оси. Ось О х 0 направлена вдоль продольной
оси аппарата от донной части к носовой. Ось О у 0 лежит в вертикальной
плоскости и направлена в сторону увеличения угла атаки. Ось О z 0 до­
полняет систему до правой ( рис. 2.6 ).
Хо т
Ах
D
^ ю
М
Рисунок 2.6 - Системы координат
Координата х от точки Т задается в системе О х0у о z 0 . Эта коор­
дината является суммой двух координат в системе T x TyrZT - координа­
ты конца балки тензовесов А х т и расстояния от конца балки до вершины
носовой части модели А х то-
х от= ~ ( Ах т А хто')
Аэродинамический момент тангажа M zT относительно оси Т zT оп­
ределяется нормальной силой Y т с плечом, представляющим собой рас­
стояние от точки Т до точки D:
M zT
= Y т ( -х
от +
хос
+
х d ),
где х о с ~ координата центра масс модели в системе координат О х0у 0z0,
xd - координата центра давления в связанной системе координат С x y z .
23
Аэродинамический момент тангажа M zT
представляется в виде суммы двух моментов
после раскрытия скобок
M zT = YT ( —Хот + Х о с ) + YT - Xd .
Произведение M z = Y т ■х d является моментом нормальной силы отно­
сительно оси С z, связанной с моделью системы координат С х у z. На­
чало системы находится в центре масс модели в точке С на продольной
оси симметрии. Ось С х направлена вдоль продольной оси аппарата от
донной части к носовой. Ось С у лежит в вертикальной плоскости сим­
метрии модели, совпадающей с вертикальной плоскостью аэродинамиче­
ской трубы, и направлена в сторону увеличения угла атаки. Ось С z до­
полняет систему до правой. В результате определяется взаимосвязь мо­
ментов относительно двух параллельных осей C z и Т zT :
M z = M zT —Y
t
( x o t — x о с )■
Это соотношение позволяет определять момент относительно любой оси,
параллельной Т zT При выражении моментов M z , M zT и силы Y т
через коэффициенты моментов и сил формируется связь аэродинамиче­
ских коэффициентов:
M z —С
М
^ ■
>
YI 2 Т —
(—
—\
c m z ~ c m zT ~ с у ' \ х О Т ~ х О С ) >
м ^ ■
>
—
х ОТ ~
хот
L
,
YT — Су
5
—
х ОС ~
хос
L
•
Геометрические размеры модели - длина корпуса L , диаметр миделя D м,
площадь миделя S м, а также координаты А х т, А х то и хот - приведе­
ны в табл. 2.1.
L,
м
0,17
Таблица 2.1 - Геометрические параметры модели
Sм,
D m,
А х т,
А х то,
2
м
М
м
м
0,0485
0,001845
0,0585
0,0745
Хот,
м
-0 ,1 3 3
Целью аэродинамического эксперимента является измерение в систе­
ме координат тензовесов сил и моментов, действующих на модель лета­
тельного аппарата при различных углах атаки при нулевом угле скольже­
ния.
Порядок выполнения лабораторной работы
1.
Установить модель летательного аппарата в рабочей части аэроди­
намической трубы и закрепить ее на стержне тензовесов с нулевым значе­
нием угла крена у = 0.
24
2.
Задать программу эксперимента в виде таблицы значений углов
атаки в пределах диапазона их изменения а е [ а ц ц и ^ ^ ] ,
= -5° ,
осmax = +15° с постоянной или переменной дискретностью Л а , для кото­
рых предполагается построение моментной характеристики, а также тре­
буемую скорость воздушного потока в аэродинамической трубе Vao .
3. Оператор заносит значения скорости и углов атаки в соответст­
вующую таблицу исходных данных вычислительной программы. Она по­
зволяет автоматически выполнить всю заданную программу эксперимента
- включение аэродинамической трубы, разгон воздушного потока до за­
данной скорости, выставление модели на заданный угол атаки, определе­
ние аэродинамических сил и моментов, запись результатов в таблицу ре­
зультатов, отображение результатов на экране монитора, выключение аэ­
родинамической трубы, печать протокола испытаний.
4. Оператор запускает программу проведения эксперимента с авто­
матическим изменением углов атаки и сбором информации о действую­
щих на модель аэродинамических силах и моментах.
5. В соответствии с программой автоматизированного проведения
эксперимента вначале проводится подготовка системы измерения аэроди­
намических сил и моментов [ 3 ]. На первом этапе этой подготовки мо­
дель устанавливается на нулевой угол атаки, при котором фиксируются и
запоминаются показания тензовесов. На втором этапе при отсутствии воз­
душного потока модель меняет угловое положение по всем углам атаки в
соответствии с заданной программой эксперимента. При этом фиксируют­
ся и запоминаются показания тензовесов для этих углов атаки. Целью
этой операции является исключение из показаний тензовесов силы тяже­
сти модели, проекции которой на оси Т х т
и Т у т составляют
GxT = G sin ос и GyT = Geos а . После проведения этой операции пока­
зания тензовесов не корректируются при изменении углов атаки.
6. После проведенной подготовки начинается эксперимент по опре­
делению сил и моментов. Результатом проведенного эксперимента явля­
ется таблица значений аэродинамических характеристик в виде продоль­
ной силы X т, нормальной силы Y т , момента М zT относительно оси
TzT и скоростного напора набегающего потока g
в зависимости от дис­
кретных значений угла атаки а ( табл. 2.2 ).
Таблица отображается на экране монитора. По команде оператора на
печать выводится протокол испытаний с геометрическими параметрами
модели, условиями проведения эксперимента и таблицей результатов. С
получением протокола эксперимент считается законченным.
Таблица 2.2 - Результаты эксперимента
25
4х ?
а,
град
(X 1
Хт,
M ZT,
Нм
Yt ,
н
Па
н
(X m jn
а2
& п-1
(X п
(X щах
Обработка результатов эксперимента
Исходными данными для определения аэродинамических коэффици­
ентов продольной силы с х, нормальной силы с у и момента с mzT явля­
ются параметры модели (табл. 2.1) и результаты эксперимента (табл.
2 .2 ).
Обработка результатов эксперимента проводится в следующем по­
рядке.
1.
Для каждого значения угла атаки определяются значения коэффи­
циента продольной силы с х(а) , коэффициента нормальной силы с у(а) и
коэффициента момента с mzT (а) относительно оси Т zT тензовесов и за­
носятся в табл. 2.3:
сх (ы) = ---- —
су {а ) ~
,
"mzT (о с) =
м
M zT(a)
м
м^
2. Задается отрицательная безразмерная координата х ос < 0 поло­
жения центра масс модели С в системе О х о у о ^ о в диапазоне от 0 до
1.
3. Для каждого значения угла атаки вычисляется коэффициент мо­
мента с mz (а) относительно оси С z , проходящей через центр масс мо­
дели, на основании значений коэффициента момента с mzT ( ос) относи­
тельно оси Т zT и заносится в табл. 2.3:
Сm z (® 0 — Сm zT
(® 0 — Су (о с) • {Xq j — Xq q ) .
Таблица 2.3. - Аэ юдинамические коэффициенты
а,
град
(X 1
(X m in
а2
& п-1
(X п
26
(X щах
£ X
С У
С m zT
С mz
Xd
X Od
4. Для каждого значения угла атаки определяются безразмерные ко­
ординаты центра давления x d (a) в связанной системе координат С х у z
и хш(а) в системе координат О x0y 0 z0 и заносятся в табл. 2.3:
— / \
^ mz ( Ч )
x d ( a ) = ------------ ,
су (ос)
—
—
—/ \
x O d = x O C ~ x d ( a )-
5. По значениям коэффициентов продольной с х(а) и нормальной
с v(a) сил, а также коэффициента момента с mz, приведенным в табл. 2.3,
строятся графические зависимости коэффициентов от угла атаки а (рис.
2 .7 .- 2 .9 ) .
сУ
О
О
О
^ , град
Рисунок 2.7 - Моментная характеристика
О
0
^Цгрзд
Рисунок 2.8 - Коэффициент
продольной силы
0
^ , град
Рисунок 2.9 - Коэффициент
нормальной силы
6.
Для определения условий перенесения результатов эксперимента
на реальный летательный аппарат определяются критерии подобия:
- Число Рейнольдса Re
v
где
- скорость набегающего потока, L - характерный линейный раз­
мер модели, v - коэффициент кинематической вязкости набегающего по­
тока воздуха.
- Число Маха М
V
М =-^
,
Чю
где ада - скорость звука в набегающем потоке воздуха.
Скорость звука определяется температурой воздуха t по шкале Цель­
сия в набегающем потоке:
27
аж = 20,1^273,15 + t , —
с
Построение зависимостей аэродинамических характеристик от угла атаки
является итогом лабораторной работы.
Контрольные вопросы
1. Что такое полная аэродинамическая сила ?
2. Что является центром давления летательного аппарата ?
3. Каким образом задается положение связанной системы координат?
4. Как определяются угол атаки и угол скольжения ?
5. Зависит ли положение центра давления от величины угла атаки ?
6 Что является физической основой возникновения аэродинамиче­
ского момента ?
7. Как определяется вектор аэродинамического момента ?
8. Чему равна величина аэродинамического момента для тела враще­
ния при нулевом угле атаки и нулевом угле скольжения ?
9. Каким образом определяется знак аэродинамического момента ?
10. Что такое продольная и нормальная аэродинамическая сила ?
11. Как направлены положительные продольные и нормальные силы ?
12. Почему экспериментальное значение продольной силы определя­
ется с погрешностью ?
13. Как определяются коэффициенты аэродинамических сил и мо­
ментов ?
14. Что такое моментная характеристика аппарата ?
15. Какой угол атаки называется балансировочным ?
16. Что такое статическая устойчивость летательного аппарата ?
17. Какой вид имеет моментная характеристика для статически ус­
тойчивого аппарата ?
18. Как влияет положение центра масс на устойчивость аппарата ?
19. Каково взаимное расположение центра масс и центра давления
для статически устойчивого аппарата ?
20. Что такое запас статической устойчивости ?
28
3. СКОС ПОТОКА ЗА КРЫЛОМ ЛЕТАТЕЛЬНОГО АППАРАТА
Ц е л ь р а б о т ы : экспериментальное определение угла скоса пото­
ка за крылом летательного аппарата в области его горизонтального опере­
ния в зависимости от угла атаки крыла и положения оперения относи­
тельно крыла.
Общие сведения
Подъемная сила крыла возникает при его движении в окружающей
его сплошной среде при разности давлений на нижней и верхней поверх­
ностях крыла. У гипотетического крыла бесконечного размаха подъемные
силы в каждом сечении крыла одинаковы. У крыла конечного размаха изза разности давлений на нижней и верхней поверхностях происходит пе­
ретекание воздуха через боковые кромки крыла с его нижней поверхности
на верхнюю. Это приводит к уменьшению разности давлений в зоне пере­
текания в окрестности его концов и уменьшению подъемной силы в сече­
ниях крыла. В концевом сечении подъемная сила становится равной нулю,
а по мере смещения к середине крыла ее величина постепенно возрастает,
достигая максимума в середине крыла. Следствием перетекания воздуха
является образование области потока с вращательным движением, форми­
рующим два вихревых жгута, стекающих с боковых кромок крыла [ 4, 5 ]
( рис. 3.1 ).
л:
Рисунок 3.1. Вихревые жгуты
Образование различных по величине давлений на нижней и верхней
поверхностях крыла является следствием различия скоростей воздушного
потока на этих поверхностях. В плоскости профиля крыла несимметрич­
ность поля скоростей относительно направления вектора скорости невоз­
мущенного потока является условием существования циркуляции скоро­
сти по замкнутому контуру вокруг профиля. Величина циркуляции скоро­
сти Г=Г(г) переменна по координате z вдоль крыла, уменьшаясь по ме­
ре приближения к концам крыла [ 4, 6 ]. По этой причине математиче­
ской моделью крыла является эквивалентная вихревая система, состоящая
из присоединенных вихрей, образующих несущую поверхность. Интен­
29
сивность вихрей несущей поверхности изменяется по хорде и по размаху.
На основании теоремы Гельмгольца интенсивность вихрей по длине вих­
ревой трубки не изменяется. Поэтому уменьшение интенсивности присое­
диненных вихрей вдоль размаха крыла возможно только в том случае, ес­
ли с задней и боковых кромок крыла сходят вихри с интенсивностью, со­
ответствующей изменению циркуляции скорости по размаху. Эти вихри,
называемые свободными, образуют за крылом вихревую пелену. Она яв­
ляется неустойчивой и на некотором расстоянии от крыла сворачивается в
два вихревых шнура [ 7 ] ( рис. 3.2 ).
ОЕ
Рисунок 3.2. Свертывание вихревой пелены
Воздушный поток является вязкой средой. При вращении воздуха в
вихревом жгуте соседние с ним частицы воздуха по причине вязкости
среды также приходят в движение. В плоскости, ортогональной вектору
скорости невозмущенного потока
, на линии, соединяющей центры
вихревых жгутов, векторы индуктивных скоростей Vi направлены пер­
пендикулярно скорости набегающего потока в сторону вращения вихре­
вых жгутов ( рис. 3.3 ).
ОЕ
Рисунок 3.3. Индуктивная скорость воздушного потока
Они называются скоростью скоса потока. В каждой точке, соеди­
няющей линии, вектор местной скорости Vm =
+ Vt представляет со­
бой геометрическую сумму векторов скоростей невозмущенного потока
30
¥ж и индуктивной Vj. Угол в между векторами скоростей ¥т и ¥ж
называется углом скоса потока [ 8 ]. У большинства крылатых летатель­
ных аппаратов за крылом располагается горизонтальное оперение, имею­
щее одинаковый с крылом угол атаки а относительно вектора скорости
невозмущенного потока ¥ж. Наличие индуктивной скорости Ц , раз­
личной в каждом профильном сечении горизонтального оперения, приво­
дит к изменению местной скорости потока на передней кромке горизон­
тального оперения ¥г0 = ¥ CX)+¥i . Это является причиной изменения угла
атаки горизонтального оперения а Го
(рис. 3.4):
на величину угла скоса потока в
(Xго = о. —в .
За крылом бесконечного размаха нет скоса потока и вектор подъем­
ной силы горизонтального оперения согласно теореме Жуковского будет
ортогонален вектору скорости невозмущенного потока ¥ж. За крылом
конечного размаха появляется скос потока, что приводит к изменению уг­
ла атаки горизонтального оперения. В результате изменяются его аэроди­
намические характеристики за счет того, что в каждом профильном сече­
нии горизонтального оперения будет действовать местная подъемная сила
R r o , ортогональная местной скорости воздушного потока с учетом скоса
¥г о . Проекция этой силы на направление, ортогональное вектору скоро­
сти невозмущенного потока, является подъемной силой профиля горизон­
тального оперения Yro = R r o • cos в . Проекция этой силы на направле­
ние скорости невозмущенного потока является индуктивным сопротивле­
нием горизонтального оперения X aiW = R r o • sin в [ 8 ] ( рис. 3.4 ).
Го
ОС
ОС
г о
г о
ОС
V,
Рисунок 3.4. Угол скоса потока
31
Существование скоса потока, изменяющего подъемную силу гори­
зонтального оперения, влияет на устойчивость и управляемость летатель­
ного аппарата относительно его центра масс.
Описание установки
В рабочей части аэродинамической трубы между соплом 1 и диф­
фузором 7 на поворотном устройстве 3 установлена модель прямо­
угольного крыла 2 с несимметричным профилем ( рис. 3.5 ).
1*2
45"
— ¥■
Р1
Рисунок 3.5 Схема установки
Поворотное устройство предназначено для изменения угла атаки
крыла а и фиксации его во время проведения эксперимента. С крылом
жестко соединен стержень 4 , расположенный в вертикальной плоскости
симметрии крыла вдоль его хорды. На конце стержня расположен червяч­
ный механизм 11, способный при вращении ручки 9 перемещать опору
8 с установленным на ней датчиком направления скорости 5 . Опора 8
перпендикулярна стержню 4. Перемещение происходит относительно
крыла на расстояние Н от уровня хорды крыла при Н = 0 до максималь­
ного Н тах. Датчик скорости предназначен для определения направления
вектора скорости воздушного потока Vr0 на передней кромке горизон­
тального оперения. С датчиком скорости жестко связана стрелка, откло­
няющаяся при повороте датчика скорости. Стрелка указывает по шкале 6
величину местного угла атаки горизонтального оперения а г0.
Датчик скорости 5, 12 определяет направление вектора скорости
воздушного потока Vr0, которое отличается от направления скорости не­
возмущенного потока С* на угол скоса потока в. Он представляет со­
32
бой связь трех трубок, расположенных в одной плоскости. Измерения по­
ложения вектора скорости проводятся при вертикальной ориентации этой
плоскости. У средней трубки ее поперечный срез перпендикулярен про­
дольной оси трубки, а у крайних плоскости среза расположены под углом
45° к их продольным осям и симметрично продольной оси средней труб­
ки. Продольной осью датчика является продольная ось средней трубки.
При совпадении продольной оси датчика с направлением вектора
скорости воздушного потока VT0 средняя трубка является приемником
полного давления, а две боковые воспринимают одинаковые давления
р 1 = р 2 , отличающиеся по величине от полного. При отклонении про­
дольной оси от направления вектора скорости боковые трубки датчика
будут воспринимать различные между собой давления р \ ф р г. Боковые
трубки соединены с трубками U - образного жидкостного манометра 10.
Индикатором отклонения вектора скорости воздушного потока VT0 от
продольной оси датчика является различие уровней жидкости в трубках
манометра. При совпадении продольной оси датчика с направлением век­
тора скорости VT0 уровни жидкости в трубках манометра становятся
одинаковыми h \ = h 2Порядок выполнения лабораторной работы
1. Датчик скорости установить в положение, при котором угол атаки
горизонтального оперения должен иметь нулевое значение а го = 0. Для
крыла с несимметричным профилем установить его на нулевой угол ата­
ки, а датчик переместить на максимальное расстояние Н = Н тах от на­
правления хорды крыла. В этом положении величина скоса потока наи­
меньшая и вектор скорости Vr0 мало отклоняется от вектора скорости
невозмущенного потока
.
2. Включить аэродинамическую трубу.
3. Поворотом шкалы 6 установить ее в положение, при котором ну­
левая отметка " 0 " на шкале будет совпадать со стрелкой индикатора,
указывая нулевое значение угла атаки горизонтального оперения а го = 0.
4. Установить крыло в начальное положение на заданный угол атаки
а = а о.
5. Переместить датчик скорости в исходное положение по высоте
Н = Н о.
6. Перед выполнением измерения угла скоса потока требуется вра­
щением датчика скорости добиться выравнивания показаний уровней
жидкости в двух трубках батарейного манометра h i = h 2 , что является
33
условием совпадения продольной оси датчика с направлением вектора
скорости vro .
7. Считать со шкалы 6 величину местного угла атаки горизонталь­
ного оперения а го и записать величины а, Н и а го в табл. 3.1.
Tаблица 3.1. Результаты эксперимента
а,
град
Н,
мм
Но
Ого,
град
S,
град
н}
О-о
Н max
Но
н}
aj
Н max
Но
н}
Н max
Но
н}
Оmax
Н max
8. Изменить смещение датчика скорости Н / + j = Н t + А Н , i = 0, 1,
..., и в диапазоне Н е [HQ, H mSK\ на заданный шаг А Н и повторить из­
мерения с пункта 6.
9. При превышении заданной максимальной высоты Н тах изменить
угол атаки крыла в диапазоне а е [ а 0, а тах] с заданным шагом Да и по­
вторить измерения с пункта 5.
10. При превышении заданного максимального угла атаки а тах вы­
ключить аэродинамическую трубу. Эксперимент окончен.
Обработка результатов эксперимента
Обработка результатов эксперимента проводится в следующем по­
рядке.
1. Определяется угол скоса потока и заносится в табл. 3.1.
8
34
—
(X — (X г о .
2.
По значениям, помещенным в табл. 3.1, строится графическая за­
висимость угла скоса потока от угла атаки крыла и высоты подъема гори­
зонтального оперения s = f ( а, Н ) ( рис. 3.6 ).
£,
гр ад
О
О
О" , г р а д
Рисунок 3.6 - Изменение угла скоса потока
Полученная зависимость является итогом лабораторной работы.
Контрольные вопросы
1. Что называется профилем крыла ?
2. Что такое хорда профиля крыла ?
3. Почему верхняя и нижняя дуги профиля имеют различную кри­
визну ?
4. Как определяется угол атаки профиля ?
5. За счет чего при обтекании крыла воздушным потоком у него воз­
никает подъемная сила ?
6. От чего зависит величина подъемной силы крыла неизменной
формы ?
7. Почему на концах крыльев возникают вихревые жгуты ?
8. Что из себя представляет вихревая схема крыла ?
9. Как по теореме Н. Е. Жуковского определяется подъемная сила
крыла ?
10. Что такое циркуляция скорости по замкнутому контуру ?
11. Что такое индуцированная скорость воздушного потока ?
12. Образуется ли индуцированная скорость при обтекании крыла
идеальной жидкостью ?
13. Как образуется скос потока ?
14. Какое влияние оказывает скос потока на аэродинамические харак­
теристики горизонтального оперения ?
15 При каком расположении крыла с симметричным профилем скоса
потока не наблюдается ?
16. Увеличивается или уменьшается подъемная сила летательного ап­
парата при наличии скоса потока ?
17. Почему угол скоса потока зависит от высоты подъема горизон­
тального оперения над крылом ?
35
18. Может ли скос потока быть отрицательной величиной ?
19. Как экспериментально определяется направление скорости воз­
душного потока за крылом ?
36
4. ВИЗУАЛИЗАЦИЯ КОСОГО СКАЧКА УПЛОТНЕНИЯ
Ц е л ь р а б о т ы : экспериментальное определение угла отклонения
косого скачка уплотнения и числа Маха сверхзвукового потока по резуль­
татам визуализации косого скачка при обтекании клина.
Общие сведения
При движении твердого тела в виде усеченного конуса с углом полураствора в к с затупленной носовой частью в газообразной среде со
сверхзвуковой скоростью перед ним возникает криволинейная ударная
волна, состоящая из прямого скачка уплотнения, последовательности ко­
сых скачков уплотнения и линий слабых возмущений [ 4 , 9 ] ( рис. 4.1).
Прямой скачок уплотнения возникает перед той частью поверхности
обтекаемого тела, в точках которой касательная плоскость к поверхности
тела ортогональна вектору скорости набегающего потока Ц . При прохо­
ждении частиц газа через прямой скачок вектор скорости перед скачком
Ц и за скачком V2 имеют одинаковые направления, но величина скоро­
сти за скачком становится дозвуковой. Прямой скачок уплотнения являет­
ся отсоединенным, не касающимся поверхности тела.
линия слабых возмутцешш
косой скачок
1
прямой скачок
/
Рисунок 4.1. Схема криволинейной ударной волны
Касательная к криволинейной ударной волне является косым скачком
уплотнения в точке касания. При прохождении через фронт косого скачка
вектор скорости частиц газа меняет направление. Угол /? между каса­
тельной и вектором скорости перед скачком Ц называется углом накло­
на косого скачка, а угол в между направлением вектора скорости перед
скачком и вектором скорости за скачком V2 называется углом отклоне­
ния потока. Вектор скорости перед скачком уплотнения Ц не ортогона37
лен фронту скачка и раскладывается на нормальную Vln и касательную
К1т составляющие в нормальном и касательном направлениях к фронту
косого скачка. Величины этих скоростей зависят от угла наклона косого
скачка Vln = VYsin (3 и VlT = VYcos (3 . Вектор скорости за скачком уплот­
нения V2 также раскладывается на нормальную V2n и касательную У2т
составляющие величиной V2n = V2 sin(f3 - 0) и V2x = V2 cos(f3 - 0). Для
нормальных составляющих скоростей Vln и У2п косой скачок является
прямым, поскольку при пересечении фронта скачка направления нор­
мальных составляющих не изменяются. Касательные составляющие ско­
ростей У1т и У2т направлены вдоль фронта скачка и величины их оди­
наковы V 1 Т = V 2 т ■
По мере удаления от обтекаемого тела направление вектора скорости
за скачком У2 изменяется, приближаясь к направлению вектора скорости
перед скачком Vx . После совпадения направлений ударная волна перехо­
дит в волну слабого возмущения, касательная к которой наклонена под
углом /л к вектору скорости невозмущенного потока Vx. Эта касательная
является линией возмущения Маха.
При обтекании воздушным потоком острого клина с углом 0, одна
из сторон которого совпадает с вектором скорости невозмущенного пото­
ка Vx , перед ним образуется волна возмущения, состоящая из косого
скачка уплотнения и линии возмущения Маха ( рис. 4.2 ). Косой скачок
уплотнения возникает на той стороне клина, при обтекании которой век­
тор скорости меняет направление. Для определенного диапазона углов
клина 0 е [ О , 0 тах] , не превышающих максимального 0тах , скачок яв­
ляется присоединенным.
линия возмущ ения
Рисунок 4.2. Сверхзвуковое обтекание клина
38
При этом угол отклонения фронта косого скачка уплотнения /?, угол
клина 0, число Маха набегающего потока М } при скорости потока V i
и скорости звука а / и показатель адиабаты к связаны зависимостью
[2 ].
s i n 2 (3
*
t g 0 = - r — j---------------------j— c t g P ,
/t + 1
. 2n
i
S i n (3 + --------
Mx =— ,
k=
1,4.
/7
a l
M\
z
При известных значениях угла клина 0 и угла наклона косого скачка /?
из этого соотношения может быть определено число Маха воздушного
потока перед скачком уплотнения
л /2
_
C tg(3-tg0
к +\
.2
sin2 р •ctg р — ::i^ - s i n z (3 tg 0
V 2
J
Угол отклонения линии возмущения Маха /л определяется числом Маха
M r.
1
sin р = ------.
Мх
Для экспериментального определения числа Маха М х необходимо
по визуальному изображению клина, фронта скачка уплотнения и линии
возмущения Маха определить величины углов 0 , /? и /л.
Описание установки
Аэродинамическая труба сверхзвуковых скоростей представляет со­
бой вертикально расположенную трубу круглого сечения 7 долговремен­
ного действия незамкнутого типа с закрытой рабочей частью прямоуголь­
ной формы с двумя прозрачными противоположными боковыми стенками
5 и 8 ( рис. 4.3 ). Соплом трубы является сопло Лаваля 6 , в которое под
давлением около 8 атм. подается сжатый воздух от баллонов высокого
давления. После прохождения сопла поток воздуха приобретает сверхзву­
ковую скорость
^ которой соответствует число Маха М } > 1.
Для наблюдения фронта скачка уплотнения используется оптическая
система, реализующая теневой метод Теплера. В его основе лежит физи­
ческий эффект преломления луча света на границе раздела двух прозрач­
ных сред с различной плотностью. Источником света является импульсная
лампа 10, пучок света от которой проходит через линзу 11 и фокусиру­
39
ется в середине входной щели 12. Затем пучок света попадает на вогну­
тое зеркало 13, которое формирует параллельный поток отраженного
света. Он проходит через стеклянную линзу - коллиматор 9 и боковую
прозрачную стенку 8 в рабочую часть трубы. Линза 9 и зеркало 13 же­
стко зафиксированы внутри металлического тубуса 14. При отсутствии в
рабочей части трубы модели параллельные лучи света проходят через од­
нородную среду движущегося воздуха в рабочей части трубы и не изме­
няют своего направления, оставаясь параллельными. После прохождения
боковой стенки рабочей части 5 и коллиматора 4 параллельные лучи
попадают на вогнутое зеркало 21, после отражения от которого фокуси­
руются в точке F. Линза 4 и зеркало 21 жестко зафиксированы внутри
металлического тубуса 20. В фокусе F находится нож Фуко 1 с прямой
острой передней кромкой. В точке фокуса собираются только параллель­
ные лучи между линзой 4 и зеркалом 21. После фокуса лучи проходят
через линзу 2 и достигают экрана 3 , на котором образуют световое
пятно.
Если в потоке воздуха в рабочей части трубы имеются зоны с разной
плотностью, то часть лучей 15 преломляются и изменяют свое направле­
ние 18. Эти лучи после отражения от зеркала 21 не попадают в фокус F
и отсекаются ножом. На экране образуются темные пятна в тех местах, в
которые должны были попасть отклоненные лучи. В итоге вся область
воздушного потока с плотностью, отличной от плотности окружающей
среды, отразится на экране в виде такой же по форме темной области.
м
Рисунок 4.3 Схема установки
40
При проведении эксперимента в рабочей части аэродинамической
трубы установлен клин, у которого одна плоская сторона параллельна
вектору скорости набегающего воздушного потока 16, а другая наклоне­
на под углом к вектору скорости. Наклонные поверхности клина парал­
лельны продольным осям тубусов 14 и 20. На передней кромке клина
образуются две ударные волны. Волна на наклоненной грани является ко­
сым скачком уплотнения, а на другой грани является волной возмущения
Маха. В пределах поверхности ударной волны плотность среды более вы­
сокая по сравнению с плотностью окружающего потока и на экране удар­
ные волны отображаются прямыми линиями 19.
Порядок выполнения лабораторной работы
1. Установить светофильтр на окуляре, через который визуально на­
блюдается скачок уплотнения непосредственно в рабочей части аэроди­
намической трубы.
2. Включить источник яркого освещения.
3. Открыть запорный вентиль трубопровода с воздухом высокого
давления, что является запуском аэродинамической трубы.
4. Через окуляр визуально наблюдается скачок уплотнения непосред­
ственно в рабочей части аэродинамической трубы.
5. Убрать светофильтр и установить напротив окуляра перпендику­
лярно его продольной оси экран со светлым покрытием.
6. Закрепить на экране лист бумаги с координатной сеткой, представ­
ляющей собой полярные координаты с началом, совмещенным с изобра­
жением вершины клина.
7. Зафиксировать на координатной сетке положение сторон клина,
фронта косого скачка уплотнения и фронта волны возмущения Маха.
8. Закрыть запорный вентиль трубопровода с воздухом высокого
давления. Эксперимент окончен.
Обработка результатов эксперимента
Обработка результатов эксперимента проводится в следующем по­
рядке.
1. По изображениям сторон клина и фронтов ударных волн опреде­
ляются угол клина в\ угол отклонения косого скачка уплотнения /? и
угол волны возмущения Маха /л.
2. По значениям углов в и /? вычисляется число Маха набегающего
потока воздуха при к = 1,4 :
41
ctg (3—tg 0
M !2 =
3.
тока воздуха
k +\
. 9 n I r\
sin p •ctg (3—
sm (3 tgO
v 2
у
По значению угла /л вычисляется число Маха набегающего по­
М1
1
sm ju
4.
Результаты эксперимента признаются удовлетворительными, если
определенные значения чисел Маха отличаются друг от друга не более
чем на 5%.
Полученные значения чисел Маха являются итогом лабораторной ра­
боты.
Контрольные вопросы
1. Условия возникновения прямого скачка уплотнения ?
2. Как изменяются величина скорости и давление воздушного потока
после пересечения прямого скачка уплотнения ?
3. Какой скачок уплотнения называется косым ?
4. Каким образом изменяется направление и величина скорости по­
тока при пересечении косого скачка уплотнения ?
5. В чем разница между присоединенным и отсоединенным косым
скачком уплотнения ?
6. При каких условиях косой скачок уплотнения является присоеди­
ненным ?
7. Почему по мере удаления от обтекаемого тела косой скачок уплот­
нения переходит в волну возмущения Маха ?
8. Является ли угол наклона косого скачка уплотнения постоянным
на всем отрезке существования скачка при обтекании клина ?
9. Как изменяется величина скорости за косым скачком уплотнения
по мере удаления от клина ?
10. Возникает ли косой скачок уплотнения при обтекании сверхзву­
ковым потоком плоской прямоугольной пластинки с нулевой толщиной ?
11. При обтекании какого тела сверхзвуковым потоком скачков уп­
лотнения не образуется ?
12. В чем заключается принцип действия метода Теп лера по визуали­
зации фронта скачка уплотнения ?
42
13. Каким образом в рабочей части аэродинамической трубы достига­
ется сверхзвуковая скорость ?
14. Можно ли получить теневое изображение скачка уплотнения при
обтекании конуса ?
15. Какого цвета будет изображение скачка уплотнения, если лучи
света источника будут цветными ?
16. Будет ли изменяться угол наклона косого скачка уплотнения при
изменении скорости воздушного потока в аэродинамической трубе ?
ЗАКЛЮЧЕНИЕ
Рассмотренные в настоящем пособии лабораторные работы дают
представление о физических процессах, связанных с движением воздуш­
ного потока относительно летательного аппарата. Описания теоретиче­
ских основ аэродинамического процесса, схемы экспериментальной уста­
новки, порядка проведения эксперимента и обработки его результатов по­
зволяют студентам самостоятельно провести эксперимент и оценить его
результаты.
43
СПИСОК ИСПОЛЬЗОВАННЫХ и с т о ч н и к о в
1. Морозов, Л. В. Аэрогазодинамика: лабораторный практикум /
Л. В. Морозов. - Самара, 1994.
2. Лебедев, А. А. Динамика полета / А. А. Лебедев, Л. С. Чернобровкин. - М.: Машиностроение, 1973.
3. Исследование поляры самолета при весовых испытаниях в аэро­
динамической трубе Т - 3 СГАУ : метод, указания к лаб. работе / сост.
В. В. Тарасов, Е. В. Тарасова; Самар, гос. аэрокосм. ун-т. - Самара, 2004.
4. Аржаников, Н. С. Аэродинамика / Н. С. Аржаников, В. Н. Маль­
цев. - М . : Оборонгиз, 1956.
5. Аэродинамика летательных аппаратов / под.ред Г. А. Колесникова.
- М . : Машиностроение, 1993.
6. Аржаников, Н. С. Аэродинамика летательных аппаратов / Н. С.
Аржаников, Г. С. Садекова. - М.: Высшая школа, 1983.
7. Остославский, И. В. Динамика полета. Устойчивость и управляе­
мость летательных аппаратов / И. В. Остославский, И. В. Стражева. - М.:
Машиностроение, 1965.
8. Лойцянский, Л. Г. Механика жидкости и газа / Л. Г. Лойцянский. М.: Наука, 2003.
9. Краснов, Н. Ф. Аэродинамика тел вращения / Н. Ф. Краснов. - М.:
Машиностроение, 1964.
44
Учебное издание
Морозов Лев Владимирович
ЭКСПЕРИМЕНТАЛЬНАЯ АЭРОМЕХАНИКА
Учебное пособие
Редактор Н. С. К у п р и я н о в а
Доверстка Т. Е. П о л о в н е в а
Подписано в печать 21.06.2010 г. Формат 60x84 1/16..
Бумага офсетная. Печать офсетная.
Печ. л. 2,75.
Тираж 100 экз. Заказ
. Арт.С-5/2010
Самарский государственный
аэрокосмический университет.
443086 Самара, Московское шоссе, 34.
Изд-во Самарского государственного
аэрокосмического университета
443086 Самара, Московское шоссе, 34.
45